ENTRENAMIENTO DE UN MODELO DIFUSO TIPO MAMDANI MEDIANTE EL MÉTODO DE FUERZA BRUTA DETERMINÍSTICA

Resumen— La Transformada Watershed, T.W., es una
herramienta morfológica poderosa que permite la segmentación de estructuras complejas que no pueden ser procesadas mediante otros métodos convencionales de procesamiento digital de imágenes. El éxito de esta transformada depende de la elección de marcadores unívocos para cada uno de objetos de interés que eviten la sobresegmentación que presentan las imágenes de alto contenido de textura. La obtención de marcadores de objetos de gran variabilidad de textura, forma y tamaño requiere un planteamiento complejo y altamente dependiente de cada aplicación en particular. El presente trabajo propone un sistema de inferencia basado en lógica difusa (tipo Mamdani) para la identificación automática de los marcadores para la T.W. Los resultados obtenidos muestran que el método propuesto, además de simple y robusto, es fácilmente adaptable a las características particulares de cada imagen.
Palabras clave— Lógica difusa, Marcadores, Segmentación de imágenes, transformada Watershed.
I. INTRODUCIÓN a partición de una imagen en regiones que permitan obtener la información que busca el observador
experimentado se puede realizar mediante una herramienta morfológica denominada transformada Watershed (T.W.). Esta transformada es fácilmente adaptable a los diferentes tipos de imágenes y es capaz de distinguir objetos sumamente complejos que no pueden ser analizados correctamente mediante algoritmos convencionales [1]-[5]. Este es el caso de las imágenes biomédicas, las cuales están compuestas por objetos con alto contenido de textura y una amplia variabilidad de formas, tamaños e intensidades [6].
El éxito de la T.W. depende fundamentalmente de la existencia de marcadores unívocos para cada uno de los objetos de interés. La obtención de marcadores adecuados en imágenes con alto contenido de textura resulta una tarea laboriosa y muchas veces imposible. La determinación automática de marcadores sigue siendo en la actualidad un objetivo difícil de lograr. Los algoritmos de determinación de marcadores existentes son dependientes en gran medida de la estructura a segmentar. Además, poseen un elevado costo computacional y determinan los marcadores de manera efectiva pero no automática al procesar imágenes con alto
Mariela Azul Gonzalez - Departamento de Ingeniería Electrónica de la Universidad Nacional de Mar del Plata. Email: [email protected]
Virginia Laura Ballarin - Org: Departamento de Ingeniería Electrónica de la Universidad Nacional de Mar del Plata. Email: [email protected].
contenido de textura. El objetivo de este trabajo es la generación de un sistema de
inferencia basado en lógica difusa que permita la determinación automática de marcadores para la T.W. en imágenes biomédicas con alto contenido de textura.
II. MATERIALES Y MÉTODOS A. Transformada Watershed Una imagen en escala de gris puede interpretarse como la
imagen topográfica de un relieve terrestre; en este sentido podemos decir que las intensidades de gris de mayor amplitud se corresponden con llanuras o montañas mientras que las intensidades de menor valor se corresponden con valles y ríos. A partir de estas características de las imágenes se define una técnica de procesamiento digital de imágenes denominada Watershed, que mediante la inundación de los valles, es capaz de reconocer los contornos de zonas topográficas similares, rodeadas por cadenas montañosas. La transformada Watershed, T.W., es un método de segmentación basado en regiones. Este método clasifica los píxeles según su proximidad espacial, el gradiente de sus niveles de gris y la homogeneidad de sus texturas [7]-[9].
Con el objeto de segmentar una imagen en niveles de gris, previo a la aplicación del método “Watershed”, a través de su gradiente, se obtiene una imagen donde los niveles de los contornos de los objetos a segmentar representan una zona de elevada intensidad de gris. Las zonas de baja intensidad de gris darán lugar a las vasijas o “basins” por donde fluirá el agua e inundará la topografía de la imagen. Las elevaciones en los niveles de gris generadas por los contornos permanecerán y darán lugar a la segmentación de la imagen mediante las líneas Watershed resultantes.
La T.W. clásica inunda la imagen gradiente a partir de sus mínimos regionales. En imágenes no homogéneas y/o embebidas en ruido no existe un mínimo regional para cada objeto de interés. Esto hace que en estos casos se produzca una sobresegmentación; es decir, cada uno de los objetos está delimitado por más de una región resultado de la T.W.. Para evitar la sobresegmentación se recurre a la definición de marcadores unívocos para cada uno de los objetos de interés. Estos marcadores o semillas inician los algoritmos de inundación indicando los sectores que darán lugar a las “basins “[10]-[16]. En consecuencia el éxito de la T.W. depende principalmente de las características de los marcadores.
Segmentación de imágenes utilizando la transformada Watershed: obtención de
marcadores mediante lógica difusa M. A. Gonzalez y V. L. Ballarin
L
IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008 223

B. Indicadores de textura Las imágenes con un alto contenido de textura
generalmente no poseen histogramas bimodales (con dos valles) que distingan los diversos componentes de las mismas. En estas imágenes la caracterización de regiones no se puede realizar solamente por los niveles de gris sino que se debe tener en cuenta también la distribución de las intensidades. En consecuencia la aplicación de métodos basados en el histograma global de la imagen no resulta adecuada en la segmentación de imágenes texturadas.
La caracterización de la textura de los componentes de las imágenes se realizó mediante indicadores que permitieron su posterior distinción. Para ello se calcularon matrices de co-ocurrencia [3][9]. Las matrices de co-ocurrencia se construyeron a partir de máscaras que analizaron la distribución de niveles de gris del entorno de cada píxel. Luego se obtuvieron diversos índices o indicadores calculados a partir de los valores de las matrices de co-ocurrencia.
Este análisis de textura permite seleccionar los píxeles que servirán de marcadores en base a su textura y no solamente a partir de su nivel de gris.
C. Sistema de inferencia difuso En este trabajo se propone la lógica difusa como
herramienta para asistir en la determinación de los marcadores. La utilización de lógica difusa para la definición de marcadores es adecuada ya que no es necesario obtener el objeto completo, sino una aproximación de su interior [14]. Esta disciplina surge de la formalización del conocimiento impreciso, ambiguo o expresado lingüísticamente [17]-[20]. Existe una ambigüedad inherente al procesamiento de imágenes, por ejemplo: en imágenes topológicas que proyectan un relieve de 3D en una imagen de 2D; en la digitalización de imágenes de microscopios, donde la resolución, la definición y el contraste depende del usuario y de cada aplicación en particular; en contornos obtenidos con poca resolución; en imágenes de regiones texturadas y no homogéneas; y en imágenes médicas, donde la figura no es una mera foto, sino que es la cuantificación de algún tipo de energía de naturaleza estocástica que interacciona con el cuerpo cuya cuantificación resulta en imágenes borrosas e imprecisas.
Un sistema de inferencia difuso procesa información de variables de entrada para dar valores de salida. Utiliza los valores de las variables de entrada para determinar los valores de verdad de los predicados que utilizará como antecedentes de una base de reglas. A cada valor de las variables de entrada se les asigna un valor de pertenencia a distintos conjuntos difusos que se definen para cada variable. Este procedimiento se realiza mediante funciones de pertenencia que pueden ser, por ejemplo, trapezoidales o gaussianas. Mediante un proceso de inferencia para cada regla (determinación de consecuentes) y un posterior proceso de agregación (unión de los resultados de las distintas reglas), se obtienen valores para las variables de salida para diferentes valores de las variables de entrada.
En la actualidad existen métodos de segmentación que aplican lógica difusa a la función entropía del histograma de una imagen con el objeto de mejorarla y segmentarla [20]. Definen funciones de pertenencia difusa para discriminar los espectros del histograma. Sin embargo, en imágenes con texturas no es posible diferenciar objetos de manera automática solamente a partir de los histogramas de las intensidades de gris o de sus atributos. Este trabajo propone la utilización de un sistema de inferencia para relacionar los indicadores de textura de modo para identificar los marcadores de los objetos de interés.
D. Algoritmo propuesto Todos los algoritmos utilizados se implementaron en
Matlab® R14. Se trabajó con funciones estándar de este lenguaje y con una biblioteca específica denominada SDC Morphology Toolbox (SDC, 2001)[21] con funciones de morfología matemática.
Los principales pasos del algoritmo se detallan a continuación
Paso 1: Análisis de textura El análisis de textura se realizó a partir de los indicadores
determinados una vez calculadas las matrices de co-ocurrencia para cada uno de los píxeles de las imágenes. Se calcularon el contraste, el valor máximo y la energía de la matriz de co-ocurrencia para cada píxel. Las máscaras utilizadas poseen un tamaño de 3x3, 5x5, 7x7, 10x10 y 15x15. También se analizaron otros indicadores como el valor medio de cada entorno y la imagen gradiente. Los valores de los indicadores que se analizaron pertenecen al intervalo [0,1]. Los mismos se trasladaron al intervalo [mín, máx] = [0, 255] para normalizarlos y poder definir las funciones de pertenencia en base a valores que se observan más fácilmente en una imagen en escala de gris.
Paso 2: Aplicación de un sistema de inferencia que
reconoce los objetos de interés A cada uno de los valores de los indicadores se le asignó un
valor de pertenencia a “Objeto” y “Fondo”. La definición de las funciones de pertenencia se realizó de manera manual con el conocimiento de un observador experimentado, reconociendo los objetos de interés. El observador indicó el objeto que desea segmentar. Luego se midió el valor medio y desvío estándar de los valores de cada indicador en el lugar que se encuentra el objeto de interés. Estos valores fueron utilizados para establecer los parámetros de las funciones de pertenencia trapezoidales que identifican los objetos. El soporte las mismas se fijó en el intervalo [valor medio del objeto menos desvío estándar, valor medio del objeto más desvío estándar]. Para el subconjunto difuso que evalúa la pertenencia al fondo se utilizó el mismo procedimiento. Luego se aplicaron reglas de inferencia de tipo Mamdani, las cuales se muestran a continuación.
224 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008

Si el píxel posee un valor de energía correspondiente con la energía del objeto de interés, entonces es objeto.
Si el píxel posee un valor de energía correspondiente con la energía del fondo, entonces es fondo.
Si el píxel posee un valor de contraste correspondiente con el contraste del objeto de interés, entonces es objeto.
Si el píxel posee un valor de contraste correspondiente con el contraste fondo, entonces es fondo.
Si el píxel posee un valor medio correspondiente con el valor medio del objeto de interés, entonces es objeto.
Si el píxel posee un valor medio correspondiente con el valor medio del fondo, entonces es fondo.
Finalmente el resultado del sistema de inferencia se
“desfuzzifica” obteniendo un valor entre cero y uno que indica si el píxel pertenece al objeto de interés o al fondo.
Paso 3: Obtención de marcadores El resultado de la aplicación del sistema de inferencia
difuso se binarizó (umbral en 128). Fue posible utilizar esta binarización sencilla debido a que el sistema de inferencia permite obtener valores cercanos a uno cuando el píxel pertenece al objeto de interés y valores cercanos a cero cuando pertenece al fondo. En consecuencia cuando estos valores se trasladan al intervalo de niveles de gris quedan cercanos al nivel 255 y al 0 respectivamente y al binarizarlos permiten identificar en un alto porcentaje los píxeles del objeto de interés. A pesar de ello unos pocos píxeles que pertenecen a los contornos de los objetos y/o fueron mal identificados debieron ser eliminados para que cumplan con las propiedades de unicidad y conectividad que requieren los marcadores para la T.W.[14].
En consecuencia a esta última imagen binaria se le aplicó una apertura para eliminar pequeñas componentes conectadas pertenecientes al fondo y a objetos irrelevantes [7]. Luego se le aplicó un cerramiento para unir componentes conectadas cercanas. También fue necesario aplicar una erosión con un elemento de 3x3 para que los marcadores no excedan el tamaño real del objeto, incrementado al aplicar los operadores morfológicos anteriores. Los marcadores deben pertenecer al interior de los objetos y no a sus contornos para que pueda producirse una correcta inundación del gradiente.
Después del filtrado morfológico se obtienen los marcadores que se utilizarán como marcadores internos en la obtención de las líneas Watershed. Estos marcadores indican los objetos de interés que son necesario inundar para obtener su contorno. El fondo de la imagen también se debe marcar para obtener una región que represente el fondo u otros objetos irrelevantes. Para ello se realizó una erosión del complemento de los marcadores internos. Esto es posible debido a que el algoritmo permite obtener marcadores de tamaño significativo. Estos últimos se denominan marcadores externos.
Paso 4: Aplicación de la transformada Watershed Finalmente se aplica a la imagen gradiente de la imagen
original la T.W. a partir de los marcadores internos y externos obtenidos con el procedimiento anterior.
Se utilizó el gradiente morfológico por ser el gradiente que presenta menor ruido y mayor contraste y que además permite obtener las líneas Watershed que mejor aproximan los objetos de interés.
E Imágenes de prueba La elección de las imágenes de prueba se fundamentó en el
grado de dificultad que éstas presentan cuando se le aplican técnicas convencionales de segmentación de imágenes. Se analizaron imágenes texturadas y de características distintas.
Las primeras imágenes analizadas se corresponden con biopsias de médula ósea cuya imagen digital se obtuvo mediante un microscopio óptico. A partir de ellas se requiere segmentar las trabéculas óseas que permitan el diagnóstico. Las trabéculas de los distintos pacientes poseen textura, formas y tamaños variables (Fig. 1a). Esto se debe a que la adquisición de las imágenes depende de la iluminación, definición y otros parámetros configurados por el médico especialista al obtener las imágenes.
No se puede utilizar su histograma para su segmentación, ya que en él no pueden distinguirse niveles de gris característicos de las trabéculas. De la misma manera otros métodos de crecimiento de regiones basados en la similaridad de los niveles de gris, usualmente aplicados en imágenes complejas, dan como resultado imágenes que difieren en gran medida de la esperada por el médico especialista. Su alta variabilidad de forma y tamaño evita además la aplicación de técnicas de morfología matemática [16].
También se analizaron otras imágenes con alto contenido de textura pertenecientes a muestras de polen y arroz cuyas imágenes fueron adquiridas con microscopio.
III. RESULTADOS El método propuesto se aplicó a las imágenes de prueba y a
las mismas imágenes pero con mayor resolución espacial y diferente iluminación. En total se analizaron 128 imágenes adquiridas con microscopio sin previo preprocesamiento.
Del análisis de los indicadores se eligió la energía, el valor medio y el contraste. Estos tres indicadores son los que mejor diferenciaron los objetos de interés.
El contraste definió la zona donde no se encuentran los objetos de interés. El valor medio unió sectores similares dentro de los objetos. La energía permitió determinar el grado de variación de los niveles de gris en el entorno de cada píxel, la cual está estrechamente relacionada con la textura de los diversos componentes. La máscara de 15x15 incorporó elementos de textura gruesa y homogeneizó las regiones. La máscara de 7x7 sirvió para no perder definición en la caracterización de los objetos. Máscaras de mayor tamaño incrementan la perdida de definición de los marcadores.
Los demás indicadores poseen valores similares en el fondo y en los diversos componentes. Luego se aplicó el algoritmo utilizando los indicadores propuestos. Estos indicadores
AZUL GONZALEZ AND LAURA BALLARIN : IMAGE SEGMENTATION USING WATERSHED 225

permitieron clasificar los píxeles tomando como base la intensidad de gris y a la textura de la región a la cual pertenecen. La normalización de los indicadores hace esta caracterización independiente del brillo de las imágenes.
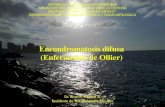
Si bien la determinación de las funciones de pertenencia a partir de estos indicadores se realizó para un solo objeto de interés, la aplicación de estas funciones de pertenencia a otras trabéculas y a otras biopsias resultó en imágenes igualmente satisfactorias. En la Fig. 1b se muestra la imagen resultado del sistema de inferencia difuso. En ella es posible observar la acentuación de los píxeles correspondientes a los objetos de interés y la atenuación de los píxeles que corresponden a objetos irrelevantes.
También se analizó la aplicación del método propuesto con funciones de pertenencia gaussianas. Éstas evitaron la aplicación de la binarización debido a que la diferencia entre los valores del resultado del sistema de inferencia de los píxeles del fondo y de los objetos no era significativa.
Los marcadores internos, resultado de la aplicación de los filtros morfológicos, se determinaron para las diferentes biopsias de médula ósea con resultados satisfactorios. En la Fig. 1c se puede apreciar como los marcadores internos se ubican en el interior de los objetos y los marcadores externos señalan el fondo.
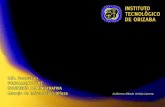
El resultado de la aplicación de la T.W. a partir de los marcadores definidos mediante el sistema difuso produjeron líneas Watershed que siguen los contornos de las trabéculas (Fig. 1d). El mismo algoritmo aplicado a biopsias de otros pacientes utilizando los mismos parámetros resultó en líneas Watershed igualmente correctas. En la Fig. 2 se muestran los resultados del procesamiento de biopsias de distintos pacientes con diversas patologías.
Para la determinación del error se utilizó la distancia simétrica, la distancia de Hausdorff y un parámetro que pondera ambas distancias simultáneamente [22]. En la Tabla I se detallan los valores de estos parámetros para los casos donde las trabéculas fueron segmentadas con menor y mayor error. Se determinó la distancia entre el contorno de la trabécula segmentada y el contorno identificado por el observador experimentado. Las trabéculas se identificaron con un error del 1% en el mejor caso y menor al 20% en la peor segmentación. Este valor se obtiene multiplicando por cien el parámetro que determina la distancia entre las curvas. La aplicación del algoritmo a biopsias con distinta iluminación homogénea dio resultados igualmente satisfactorios. Los demás objetos irrelevantes que aparecen en los resultados se deben a una iluminación no homogénea. La iluminación no homogénea es imposible de corregir con técnicas convencionales tras la adquisición de la muestra con el microscopio. Esto se debe resolver en conjunto con el microscopista antes de adquirir las imágenes.
La variación de la escala de las imágenes no afectó los resultados de la T.W..
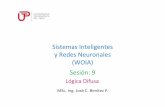
La aplicación del método basado en lógica difusa en imágenes pertenecientes a otros campos de aplicación resultó en una segmentación sencilla y precisa (Fig. 3). Para ello se
utilizó el mismo algoritmo. Los indicadores y la base de reglas utilizados son los mismos; sin embargo, como la textura de los componentes de la imagen varían, los parámetros de las funciones de pertenencia también lo deben hacer. Para obtener dichos parámetros se realizó el mismo procedimiento que con las trabéculas utilizando la indicación del objeto de interés por parte del observador experimentado.
TABLA I COMPARACIÓN DEL ERROR EN LOS RESULTADOS OBTENIDOS EN EL ANALISÍS
DE BIOPSIAS DISTINTAS. PEORES Y MEJORES CASOS.
Fig. 1. Determinación de los marcadores internos y externos mediante el sistema de inferencia difusa a. Imagen original b. Resultado del sistema de inferencia difusa. c. Marcadores internos y externos en conjunto con el gradiente. d. Aplicación de la T.W. con los marcadores obtenidos.
Fig. 2. Resultados de la segmentación de las biopsias de médula ósea.
# Biopsia/ #Trabécula 1/A 1/B 1/C 2/A 2/B 2/C 3/A 3/B
Distancia Simétrica 0,07 0,11 0,13 0,16 0,10 0,13 0,09 0,09
Dist. de Hausdorff 0,11 0,25 0,10 0,16 0,15 0,14 0,05 0,08
Parámetro 0,09 0,18 0,11 0,16 0,13 0,14 0,07 0,08
a) b)
c) d)
226 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008

Fig. 3. Resultados de la segmentación de las muestras de polen y arroz
IV. DISCUSIÓN La aplicación de la lógica difusa permite obtener
marcadores internos de un tamaño significativo que difiere levemente del tamaño del objeto. Esta ventaja no se observa cuando se utiliza la mínima o el máximo regional para obtener los marcadores. En consecuencia es posible determinar los marcadores externos o del fondo erosionando el complemento de los marcadores internos. El gradiente de imágenes con alto contenido de textura puede tener falsos contornos que dificultan la inundación. La ventaja de realizar este procedimiento reside en una mejor delimitación de los contornos de los objetos, debido a que los sectores del gradiente que se utilizan para inundar son más pequeños (Fig. 1c). Generalmente se utiliza la esqueletización por zonas de influencia para determinar los marcadores externos, pero éstos se convierten en marcadores con un área pequeña donde no siempre se asegura la inundación correcta del gradiente.
Como trabajo futuro se propone determinar los marcadores externos de manera similar a los marcadores internos mediante otras bases de reglas. Los marcadores externos se calculan normalmente a partir de los marcadores internos y no representan un problema al aplicar la T. W., a diferencia de los marcadores internos, razón por la cual este trabajo no tuvo como primer objetivo su determinación.
V. CONCLUSIÓN El sistema de inferencia difusa propuesto permite utilizar
las mismas reglas de inferencia que realiza el observador experimentado al reconocer los objetos de interés. El método propuesto puede aplicarse a otras imágenes realizando los mismos procedimientos. Estas características hacen al sistema ampliamente adaptable a cada imagen en particular. En la actualidad se está trabajando en la automatización de la selección del objeto de interés por parte del observador experimentado haciendo al algoritmo independiente del tipo de imagen a segmentar.
La principal ventaja del sistema de inferencia desarrollado es que permite la determinación del umbral, y tras aplicar la base de reglas, es sencilla y robusta. Es decir, se obtienen diferentes umbrales en la misma imagen binaria para una amplia gama de valores.
A partir de los resultados mencionados, podemos concluir que la lógica difusa permite calcular los marcadores internos de manera simple y robusta, siempre y cuando se elijan los
indicadores adecuados.
REFERENCIAS [1] S. Beucher and F. Meyer, The morphological approach to
segmentation: The Watershed Transformation: Mathematical Morphology and its aplication to image processing, E. R. Dougherty, Ed. New York: Marcel Decker, 1993, ch. 12, pp.433-481.
[2] F. Beucher, “Topografic distance and watershed lines”, Proce. Inst. Workshop on MM ans its application to signal processing, pp. 113-125, 1994.
[3] K. R. Castleman, Digital Image Processing, Prentice Hall, 1979. [4] S. H. Collins, “Terrain Parameters directly from a digital terrain
model”, Canadian Surveyor, vol. 29, no. 5, pp. 507-518, 1975. [5] M. Couprie and G. Bertrant, “Topological grayscale Watershed
Transform”, SPIE Vision Geometry Proceedings, vol. 3168, pp. 136-146, 1997.
[6] C. A. Glasbey and G. W. Horgan, Image análisis for the biological science, Statistics in Practice, Series Editor Vic Barnett., Jonh Wiley and Sons, 1994.
[7] E. R. Dougherty and J. Astola, An introduction to nonlinear image prossesing, Tutorial Texts in optical engineering, vol. TT16, 1994.
[8] J. Facon, Morfología Matemática. Teoría y ejemplos, Curitiba Brasil, CITS, 1996.
[9] R. González and R. Woods, Tratamiento Digital de imágenes, Addison Wesley, 1996.
[10] J. M. Gauch, “Image segmentation and analisys via multiescale gradient watershed hierarchies ”, IEEE Trans. on Image Processing, vol. 8, no. 1, 1999.
[11] Peijun Li and Xiaobai Xiao, “An unsupervised marker image generation metod for watershed segmentation of multiespectral imagery”, Geoscience Journal, vol. 8, no. 3, pp. 325-331, 2004.
[12] I. E. Pratikakis and H. Sahli, J. Cornelis, “Low level image partitioning guided by the gradient watershed hierarchy”, Signal Processing, vol. 75, pp. 173-195, 1999.
[13] L. S. Stanislav and Wolfgang Straber, “Extracting regions of interest appying a local watershed transformation”, Proc. of IEEE Visualization, 2000.
[14] L. Vincent and P. Soille, “Watersheds in digital spaces : An efficent algorithm based on immertion simulations”, IEEE trans. Pattern Anal, Machine Intell., vol. 13, no. 6, pp. 583-598, 1991.
[15] D. Wang “A multiscale gradient algorithm for Image Segmentation using Watersheds”, Pattern Reconition, vol. 30, pp. 2043-2052, 1997.
[16] M. A. Gonzalez, V. L. Ballarin ‘Segmentación de imágenes mediante la Transformada Watershed: Obtención de marcadores mediante Morfología Matemática,’ 9vo Simposio Argentino de Informática y Salud (SIS 2006), Universidad Nacional de Cuyo, 2006.
[17] R. E. Andrade, “Tesis: El paradigma de la lógica difusa: Oportunidades para la ciencia.”, Escuela Politécnica José Antonio Echeverría, La Habana, Cuba, Junio, 2004.
[18] M. Ceccarelli, F. Musacchiar and A. Petrosino “A fuzzy scale-space approach to feature-based image representation and retrieval”, 2005.
[19] M. Ceccarelli A. Petrosino, “A paralel fuzzy scale-space approach to the unsupervised texture separation”, 2006.
[20] H. D. Cheng, Yen Hung Chen and Ying Sun, “A novel fuzzy entropy aproach to image enhancement and thresholding”, Signal Processing, vol. 75, pp. 277-301, 1999.
[21] SDC Morphology Toolbox for Matlab 5. User’s Guide. SDC Information Systems, 2001.
[22] J. I. Pastore, E. Moler and V. L. Ballarin, “Comparison of segmentation techniques in medical images by means of non-euclidean distances”, Digital Signal Processing, en revisión, .2006.
AZUL GONZALEZ AND LAURA BALLARIN : IMAGE SEGMENTATION USING WATERSHED 227

Mariela Azul Gonzalez, nació en la ciudad de San Miguel, Pcia. de Buenos Aires, en 1981. Obtuvo su título de Ingeniera Biomédica en la Universidad Favaloro, en el año 2004. Desde el año 2005 es alumna del Doctorado en Ingeniería con orientación Electrónica de la Universidad Nacional de Mar del Plata y es becaria del CONICET. Su tesis es la determinación de marcadores para la transformada Watershed aplicada a imágenes biomédicas.
Virginia Laura Ballarin, nació en la ciudad de Mar del Plata en 1959. Obtuvo su título de Ingeniera Electrónica en 1984 en la Facultad de Ingeniería de la Universidad Nacional de Mar del Plata y su título de Magister Scientae en Filosofía de la Ciencia en la Facultad de Humanidades de la misma universidad en 1998. Obtuvo su título de Doctora en Ciencias Biológicas orientación en Bioingeniería en la Universidad Nacional de Tucumán, en 2003. Es Profesora
Asociada del Departamento de Electrónica de la Facultad de Ingeniería de la Universidad Nacional de Mar del Plata. Actualmente está a cargo del Proyecto de Procesamiento Digital de Imágenes del Laboratorio de Procesos y Medición de Señales. Sus temas de investigación incluyen procesamiento de imágenes biomédicas, análisis de texturas y morfología matemática.
228 IEEE LATIN AMERICA TRANSACTIONS, VOL. 6, NO. 2, JUNE 2008