Robótica de servicio - Ander Ansuategui, Tekniker ik4
21
© TEKNIKER 2011 Aportaciones tecnológicas y aplicaciones en robótica de Servicio Ander Ansuategui Taller de Robótica de Servicio – Innobasque – 1 Diciembre 2011
-
Upload
innobasque-agencia-vasca-de-la-innovacion -
Category
Technology
-
view
357 -
download
2
Transcript of Robótica de servicio - Ander Ansuategui, Tekniker ik4

© TEKNIKER 2011
Aportaciones tecnológicas y aplicaciones en robótica de Servicio Ander Ansuategui Taller de Robótica de Servicio – Innobasque – 1 Diciembre 2011
© TEKNIKER 2011
INDICE
1. Introducción 2. Robótica de Servicio
Mapa General Áreas de investigación /aplicación
3. Áreas de Investigación Navegación Percepción Interacción Locomoción Manipulación Seguridad

© TEKNIKER 2011
1- INTRODUCCION ::: Tekniker – IK4
Fundado en 1981 como Centro Tecnológico privado sin ánimo de lucro. Misión: “TEKNIKER-IK4 es un centro tecnológico integrado por personas con
vocación y compromiso por impulsar la capacidad innovadora de nuestros clientes e incrementar su capital tecnológico para mejorar su competitividad a través de la generación y aplicación del conocimiento científico-tecnológico.”
Especialización:
Ingeniería de precisión y mecatrónica.
Ingeniería de superficies.
Ingeniería de producción y automatización.
Tecnologías de fabricación.

© TEKNIKER 2011
1. INTRODUCCIÓN ::: Tekniker en Robótica
HRI: Interacción persona-robot Tele-operación Reconocimiento de gestos y seguimiento de personas Comando mediante voz Ayudas a la programación y control basado en sensores
Autonomía Navegación global y local Manipulación Servo control visual
Sistemas mecatrónicos Diseño y desarrollo de plataformas móviles, brazos manipuladores y elementos
auxiliares (grippers)

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Mapa General
Clasificación por áreas de aplicación y tipos de robot
Robots Personales / Domésticos
•Robots para tareas domésticas •Robots de entretenimiento •Asistencia a la discapacidad •Transporte personal •Seguridad y vigilancia doméstica •Otros
Robots de Servicio Profesional
•Robots de campo •Limpieza profesional •Sistemas de inspección y mantenimiento •Construcción y demolición •Sistemas logísticos •Robots de medicina •Aplicaciones de rescate y seguridad •Aplicaciones de defensa •Sistemas submarinos •Plataformas móviles de uso general •Robots de relaciones públicas y guías •Otros
© TEKNIKER 2011
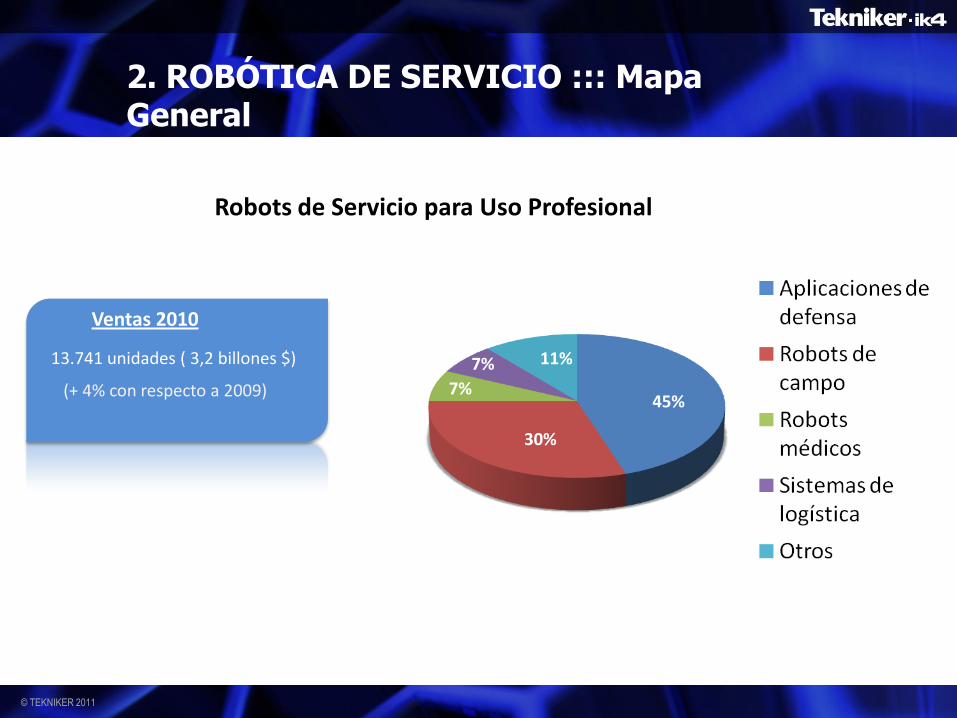
2. ROBÓTICA DE SERVICIO ::: Mapa General
45%
30%
7%
7% 11% 13.741 unidades ( 3,2 billones $)
Ventas 2010
Robots de Servicio para Uso Profesional
(+ 4% con respecto a 2009)

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Mapa General
2,2 millones de unidades ( 538 millones $)
Ventas 2010
(+ 35% con respecto a 2009)
Robots de Servicio para Uso Doméstico /Personal

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Mapa General
Proyección para el periodo 2011-2014
Robots de Servicio Profesional
Robots de Servicio Doméstico / Personal
87.500 unidades 9,8 millones unidades

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación y Aplicación
Áre
as d
e I
nve
sti
ga
ció
n
Navegación
Percepción
Interacción
Locomoción
Manipulación
Seguridad
Áre
as d
e A
pli
ca
ció
n
Logística
Transporte
Atención Sanitaria
Seguridad
Educación
Calidad de vida
Agricultura
Búsqueda y rescate
….

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Habilidad del robot para alcanzar un destino de su entorno de trabajo.
• Localización • Planificación de Trayectorias • Generación e Interpretación de Mapas
NAVEGACIÓN
¿Qué es?
¿Qué implica?

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
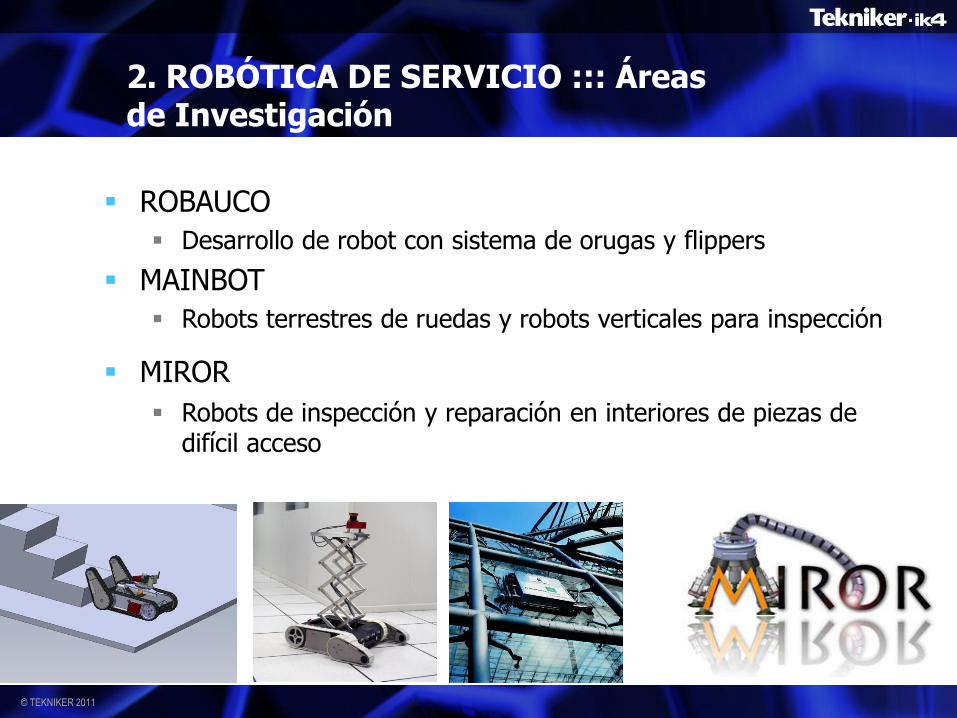
ROBAUCO
Exploración para generar mapas en base a información sensorial
KTBOT
Navegación en entornos dinámicos con un gran número de gente
MAINBOT
Navegación en grandes plantas industriales

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Interpretación de los datos recibidos a través de los sensores para la detección y reconocimiento de objetos y personas del entorno.
• Técnicas de visión artificial • Fusión de sensores • Aprendizaje automático
PERCEPCIÓN
¿Qué es?
¿Qué implica?

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
ROBAUCO / KTBOT
Sistema de detección y seguimiento de persona
MAINBOT
Inspección de espejos rotos /fugas en tuberías
AGRICULTURA DE PRECISIÓN
Utilización de técnicas de visión artificial y aprendizaje automático para el reconocimiento de patrones

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Estudio de la comunicación entre la persona y el robot.
• Reconocimiento de gestos • Procesamiento de voz • Procesamiento del lenguaje natural • Usabilidad
INTERACCIÓN
¿Qué es?
¿Qué implica?

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
ROBAUCO / KTBOT
Seguimiento de persona
CUSTOMPACKER
Desarrollo de un sistema de manipulación para equipos electrónicos de gran volumen
Cooperación persona-robot

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Desarrollo de métodos y mecanismos para que el robot se mueva en su entorno.
• Diseño y desarrollo mecatrónico • Control
LOCOMOCIÓN
¿Qué es?
¿Qué implica?
© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
ROBAUCO
Desarrollo de robot con sistema de orugas y flippers
MAINBOT
Robots terrestres de ruedas y robots verticales para inspección
MIROR Robots de inspección y reparación en interiores de piezas de
difícil acceso

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Interacción física con objetos / personas del entorno.
• Percepción activa • Aprendizaje • Trabajar con personas • Diseño de la plataforma • Control
MANIPULACIÓN
¿Qué es?
¿Qué implica?

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
MAINBOT
Sistema de manipulación para la percepción.
CUSTOMPACKER
Operario enseña al sistema cómo sujetar y empaquetar nuevos productos.

© TEKNIKER 2011
2. ROBÓTICA DE SERVICIO ::: Áreas de Investigación
Estudio de principios de seguridad necesarias para que los robots trabajen de forma segura en entornos compartidos con personas y otros equipamientos.
• Adaptación de Metodologías existentes (nueva normativa ISO/DIS 13482) • Aplicación en el diseño y funcionamiento de los robots • Métricas de medición de la seguridad
SEGURIDAD
¿Qué es?
¿Qué implica?

© TEKNIKER 2011