Robotica
6
Estudio Comparativo de Algoritmos para el Control de Trayectoria en Robots Manipuladores Ramírez, F 1,3 ., Reyes, F 2 . Resumen En este trabajo se muestra una comparación de cuatro controladores de trayectoria para el control de robots manipuladores rígidos, así como la propuesta de un controlador con base en funciones trigonométricas. La comparación se hace con base en simulaciones para un robot de 2 grados de libertad, con motores de transmisión directa. La trayectoria de referencia es una circunferencia. 1. Introducción. En el área de robótica, existe un gran interés por desarrollar nuevas estructuras de control que permitan que un robot manipulador siga alguna trayectoria deseada. Dichas estructura deberán tener un mejor rendimiento que las ya conocidas. Otra característica que se demanda al controlador, es que tenga robustez ante incertidumbres en los parámetros del robot y además que se garantice la estabilidad asintótica global. El control de trayectoria de robots manipuladores, es un tópico en el cual las contribuciones más importantes se hicieron a partir de la década de los 80’s. Entre los controladores más importantes pueden citarse: El controlador Proporcional Derivativo (PD) con precompensación [1], PD+ [2], Par calculado [3] y Par-Calculado+ [4]. En años recientes se han propuesto controladores con estabilidad asintótica global, que además resuelven el problema de la saturación de los actuadores del robot, para ello la estructura del controlador esta basada en funciones trigonométricas. Entre las más importantes se encuentran el controlador tangente hiperbólico (TANH) [5] y el arco tangente (ATAN) [6]. El control de trayectoria de robots manipuladores, requiere un conocimiento de los parámetros dinámicos del robot, los cuales resultan difíciles de determinar con precisión en forma experimental. En el control de trayectoria, además de especificar la trayectoria deseada, se requiere la velocidad y aceleración deseadas, que son la primera y segunda derivada de la posición. Para una trayectoria deseada complicada puede resultar muy complejo obtener las derivadas en forma algebraica, una alternativa es usar la derivad numérica en forma recursiva, para su cálculo. En el control de trayectoria se controla la posición y velocidad del robot, por lo que el objetivo de control es hacer que el error de estas variables tienda asintóticamente a cero. Matemáticamente esto se expresa mediante la ecuación (1). Por ser un robot un sistema no lineal, la demostración de estabilidad se hace con ayuda de las funciones de Lyapunov. ( ) () lim 0 t t t →∞ → q q % & % (1) En el presente trabajo se muestran los resultados que se obtienen, a nivel de simulación, de los controladores PD+, ATAN, TANH y un nuevo controlador que 1 Universidad Tecnológica de la Mixteca Km. 2.5 Carretera a Acatlima, Huajuapan de León, Oaxaca. Tel: 953 53 20399, ext. 200. [email protected] . 2 Benemérita Universidad Autónoma de Puabla Avenida San Claudio y 18 Sur, Puebla Pue. Tel: (222)2-29-55-00, ext. 7405 [email protected] 3 Universidad Popular Autónoma del Estado de Puebla Doctorado en Mecatrónica 21 sur 1103, Puebla, Pue. Mex
-
Upload
christian-alvarado -
Category
Documents
-
view
11 -
download
1
description
Comparación de Algoritmos
Transcript of Robotica

Estudio Comparativo de Algoritmos para el Control de Trayectoria en Robots Manipuladores
Ramírez, F1,3., Reyes, F
2.
Resumen En este trabajo se muestra una comparación de cuatro controladores de trayectoria para el control de robots manipuladores rígidos, así como la propuesta de un controlador con base en funciones trigonométricas. La comparación se hace con base en simulaciones para un robot de 2 grados de libertad, con motores de
transmisión directa. La trayectoria de referencia es una circunferencia.
1. Introducción. En el área de robótica, existe un gran interés por desarrollar nuevas estructuras de control que permitan que un robot manipulador siga alguna trayectoria deseada. Dichas estructura deberán tener un mejor rendimiento que las ya conocidas. Otra característica que se demanda al controlador, es que tenga robustez ante incertidumbres en los parámetros del robot y además que se garantice la estabilidad asintótica global. El control de trayectoria de robots manipuladores, es un tópico en el cual las contribuciones más importantes se hicieron a partir de la década de los 80’s. Entre los controladores más importantes pueden citarse: El controlador Proporcional Derivativo (PD) con precompensación [1], PD+ [2], Par calculado [3] y Par-Calculado+ [4]. En años recientes se han propuesto controladores con estabilidad asintótica global, que además resuelven el problema de la saturación de los actuadores del robot, para ello la estructura del controlador
esta basada en funciones trigonométricas. Entre las más importantes se encuentran el controlador tangente hiperbólico (TANH) [5] y el arco tangente (ATAN) [6]. El control de trayectoria de robots manipuladores, requiere un conocimiento de los parámetros dinámicos del robot, los cuales resultan difíciles de determinar con precisión en forma experimental. En el control de trayectoria, además de especificar la trayectoria deseada, se requiere la velocidad y aceleración deseadas, que son la primera y segunda derivada de la posición. Para una trayectoria deseada complicada puede resultar muy complejo obtener las derivadas en forma algebraica, una alternativa es usar la derivad numérica en forma recursiva, para su cálculo. En el control de trayectoria se controla la posición y velocidad del robot, por lo que el objetivo de control es hacer que el error de estas variables tienda asintóticamente a cero. Matemáticamente esto se expresa mediante la ecuación (1). Por ser un robot un sistema no lineal, la demostración de estabilidad se hace con ayuda de las funciones de Lyapunov.
( )( )
lim 0t
t
t→∞
→
q
q
%
&%
(1)
En el presente trabajo se muestran los resultados que se obtienen, a nivel de simulación, de los controladores PD+, ATAN, TANH y un nuevo controlador que
1 Universidad Tecnológica de la Mixteca Km. 2.5 Carretera a Acatlima, Huajuapan de León, Oaxaca. Tel: 953 53 20399, ext. 200. [email protected]. 2 Benemérita Universidad Autónoma de Puabla Avenida San Claudio y 18 Sur, Puebla Pue. Tel: (222)2-29-55-00, ext. 7405 [email protected] 3 Universidad Popular Autónoma del Estado de Puebla Doctorado en Mecatrónica 21 sur 1103, Puebla, Pue. Mex

es función de senos y cosenos hiperbólicos (CONT) [7]. 2. Modelo dinámico Un robot manipulador, o simplemente manipulador, es un brazo mecánico articulado formado por eslabones conectados a través de uniones o articulaciones que permiten el movimiento relativo entre dos eslabones consecutivos; el número de articulaciones determinan los grados de libertad [8]. Para un robot de n grados de libertad, en cada articulación se coloca un sensor de posición con el cual se tiene la posición relativa de cada una de las articulaciones. Agrupando éstas en un vector, se tiene una
representación vectorial del tipo nεq R . La
velocidad nεq R& y aceleración nεq R&& también
son vectores, las cuales se obtiene con sensores o se pueden derivar a partir de la posición. Para obtener el modelo dinámico del robot manipulador se hace uso de las ecuaciones de Euler Lagrange, las cuales se basan en la energía cinética y potencial de la estructura mecánica. Siguiendo esta metodología se puede demostrar que el modelo dinámico del robot esta dado por (2) [8].
( ) ( , ) ( ) ( )M C g f+ + + =q q q q q q q τ&& & & & (2)
Donde nετ R es el vector de torques aplicado por los motores en cada
articulación. ( ) n nM ε ×q R es la matriz de
inercias, ( , ) n nC ε ×q q R& es la matriz de fuerzas
centrípetas y de Coriolis. ( ) ng εq R es el
vector de par gravitacional y ( ) nf εq R& la
fricción.
Para un robot manipulador, las variables de entrada son los pares y la salida la posición y velocidad. Como se trata de un sistema de Múltiples entradas y Múltiples salidas (MIMO), es necesario utilizar una representación en variables de estado para aplicarle el control. La ecuación (3) corresponde a la representación de lazo cerrado para el robot manipulador.
( )[ ]1 ( , ) ( ) ( )
d
dt M C g f
q q τ q q q q q−
= − − −
&%%
&% & & &
(3)
Donde el error de posición se define como
nd ε= − q q q R% y n
dεq R corresponde a la
posición deseada. Para aplicaciones de control de trayectoria, también se definen
un error de velocidad d= −q q q&% & & y
aceleración d= −q q q&&% && && . La ley de control τ
debe satisfacer que cuando el tiempo tienda a infinito, todos los errores deberán tender a cero. Para un robot de 2 grados de libertad, se tiene 4 variables de estado, 2 para el error de posición y 2 para el error de velocidad. A continuación se explican cada uno de los controladores que se van a comparar. 3. Controladores Como se dijo en la introducción, son 4 los controladores que se van a comparar a nivel de simulación. Las demostraciones de estabilidad se pueden consultar en las referencias, ya que aquí solo se mostrará su estructura matemática. 3.1 Controlador PD+ La estructura matemática del controlador PD+ se muestra en la ecuación (4). El controlador es función de la parte proporcional y derivativa del error, así como de la dinámica del robot multiplicada por la

aceleración y velocidad deseadas, más el par gravitacional y la fricción.
( ) ( )( )
( ) d
f
M C g
f
= + + + +
+
p v dτ k q k q q q q,q q q
q
&% % && & &
&
(4)
Donde n nε ×pk R y n nε ×
vk R son matrices
constantes diagonales y corresponden a la ganancia proporcional y derivativa. 3.2 Controlador ATAN La función ATAN es de tipo saturado, ya que a medida que su argumento tiende a
+∞, la función tiende a +π/2. La ecuación (5) describe la estructura del controlador;
( )atan nεq R% es un vector de orden n, donde
cada elemento es la función arco tangente del error de posición y velocidad. Los demás términos son función de la posición y velocidad deseada.
( ) ( )( ) ( ) ( )
atan atan ( ) d
f
M
C g f
= + +
+ + +
p v
d
τ k q k q q q
q,q q q q
&% % &&
& & &
(5)
3.3 Controlador TANH El controlador TANH tiene la misma estructura que el PD, lo que cambia es que el error de posición y de velocidad se les aplica una función tangente hiperbólica, cuyos limites superior e inferior es +1. La ecuación (6) lo describe.
( ) ( )( ) ( ) ( )
tanh tanh ( ) d
f
M
C g f
= + +
+ + +
p v
d
τ k q k q q q
q,q q q q
&% % &&
& & &
(6)
3.4. Controlador CONT El controlador que se esta proponiendo tiene la estructura que se muestra en la ecuación (7).
( ) ( ) ( )( )( , ) ( )
i i d
d d
q q M
C g f
= + +
+ + +
p vτ k Fpos k Fvel q q
q q q q q
& &&% %
& & &
(7)
Donde n nε ×pk R y n nε ×
vk R similares a los
demás controladores, los términos
( ) niq εFpos R% y ( ) n
iq εFvel R&% son vectores que
son función del error de posición y velocidad, respectivamente. Están definidos por la ecuación (8).
( ) ( ) ( )( )
( ) ( )( )
( ) ( )( )
11 1
11
1
cosh senh
1 coshcosh senh
1 coshcosh senh
1 cosh
m
mm
i ii m
i mn n
mn
m q q
qm q q
m q q
q
−
−
−
+
= = +
+
Fpos
% %
%% %
% M%
% %
%
(8)
( ) ( ) ( )( )
( ) ( )( )
( ) ( )( )
11 1
11
1
cosh senh
1 coshcosh senh
1 coshcosh senh
1 cosh
m
mm
i i
i mi m
n n
mn
m q q
qm q q
m q q
q
−
−
−
+
= = +
+
Fvel
& &% %
&%& &% %
&% M&%
& &% %
&%
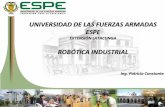
Esté controlador tiene la particularidad de que genera una familia de controladores cambiando el valor de m. 4. Parámetros del Robot El robot con base al cual se van a realizar las simulaciones se encuentra en el laboratorio de robótica de la BUAP, el cual se muestra en la Figura 1. Es de 3 grados de libertad, pero para este trabajo solo se van a tomar en cuenta los 2 últimos. En cada una de sus articulaciones se tiene un motor de transmisión directa de la firma Parker Compumotors. Los parámetros dinámicos del robot se obtuvieron por la técnica de identificación parámetrica y usando la propiedad de transformación lineal de los parámetros del modelo [9]. En la tabla 1 se muestra el valor numérico del alguno de sus parámetros de las articulaciones usadas.

Parámetro Valor
Largo del eslabón 1 (l1) 45cm
Centro de masa del eslabon1 (lc1) 9.1cm
Largo del eslabón 2 (l2) 45cm
Centro de masa del eslabon 2 (lc2) 4.8cm
Torque máximo de la articulación 2
( 2τ )
150 Nm
Torque de la articulación 3 ( 3τ ) 15 Nm
Tabla 1: Parámetros del robot
Figura 1: Robot antropomórfico de 3 grados de libertad.
Con base en estos datos y otros que por falta de espacio no se incluyen, los parámetros del modelo son lo siguientes
[6]: El vector de gravedad 2( )g εq R esta
dado por la ecuación (9), la matriz de
inercia 2 2( )M ε ×q R es la ecuación (10) y la de
inercia y Coriolis 2 2( , )C ε ×q q R& es la ecuación
(11). ( ) ( )
( )2 1 2
1 2
38.466sin 1.827sin( )
1.827sin
q q qg
q q
+ +=
+ q (9)
( ) ( )( )2 2
2
2.352 0.168cos 0.102 0.084cos( )
0.102 0.083cos 0.102
q qM
q
+ +=
+ q (10)
( ) ( ) ( )( )
3 2 1 2 2
2 2
0.084 sin 0.0834 sin( , )
0.0834 sin 0
q q q q qC
q q
− − +=
q q& & &
&&
(11)
Para el modelo de fricción solo se toman la fricción viscosa y la de Coulomb y tiene un comportamiento diferente si gira a la
izquierda o derecha. 2( )f εq R& . Para
velocidades positivas y negativas es la ecuación (12) y (13)
( ) ( )( ) ( )1 1
2 2
8.88sgn 0.76( )
0.58sgn 0.32
q qf
q q
+=
+ q
& &&
& &
(12)
( ) ( )( ) ( )1 1
2 2
9.44sgn 0.87( )
0.32sgn 0.32
q qf
q q
+=
+ q
& &&
& &
(13)
Donde 1q y 2q son las posiciones de las
articulaciones 1 y 2 respectivamente, así como la derivada de estas ( 1q& y 2q& )
corresponden a la velocidad de las articulaciones. 5. Resultados La trayectoria de prueba es una circunferencia de radio r=0.3mts, centrada en x0=0.3mts e y0=-0.3mts, con una frecuencia angular de w=0.2rad/seg. La ecuación (14) describe esta trayectoria. La velocidad y aceleración deseadas, se calculan numéricamente. El tiempo de muestreo del robot es de h=2.5ms.
( )( )
0
0
sin
cos
d
d
x x r wt
y y r wt
= +
= −
(14)
La conversión de la trayectoria deseada en coordenadas artículares, se hace con la cinemática inversa dadas en la ecuación (15).
2 2 2 21 1 2
21 2
cos2
d dd
x y l lq
l l
− + − −=
( )( )
2 21 11
1 2 2
sintan tan
cos
ddd
d d
l qxq
y l l q
− − −= − +
(15)
Para evaluar numéricamente el comportamiento del robot, en la comunidad de robótica no existe un criterio bien fundamentado para la evaluación de los controladores. Sin embargo, es aceptado en la práctica el valor escalar de la norma
2L , la cual mide el error cuadrático medio
del error de posición y velocidad. La cual se calcula con:
[ ] 22
00
1t
t
dtt t
=− ∫q q% %L
(16)

2
200
1t
t
dtt t
= − ∫q q& &% %L
Donde 0,t t Rε + y son el valor inicial y final
respectivamente. El valor mas pequeño de
2L indica un mejor rendimiento del mismo
[6]. Las comparaciones de los 4 controladores se realizaron en el simulador Simnon 3.0. El cual resuelve ecuaciones diferenciales en variables de estado. Con él se obtienen el error de posición, velocidad y aceleración. Con estos datos se hace el cálculo numérico de la norma 2L para la posición y
velocidad. La sintonía de las ganancias Kp y Kv de los controladores, se hizo a prueba y error, hasta que se obtuvieron los mejores resultados. En la tabla 2 se muestran las ganancias utilizadas para cada uno de los controladores. Parámetro PD ATAN TANH CONT
Kp1 150 130 130 130
Kv1 0.1 1 1 1
Kp2 15 13 13 13
Kv2 0.1 1 1 1
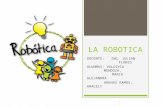
Tabla 2: Ganancias de los controladores En la Figura 2 se muestra la gráfica de la trayectoria que sigue el robot para los 4 controladores. Como se puede observar, todos ellos describen la trayectoria deseada. Al inicio CONT se desvía un poco, pero finalmente se ajusta. En la tabla 3 se muestra la norma 2L para
la posición velocidad y aceleración. Como se puede ver de los datos, en todos los casos el controladote CONT es el que tiene un mejor desempeño en comparación con el TANH, ATAN y el PD. Este último es el que muestra los peores resultados.
Para tener una mejor comparación del rendimiento, se toma como base el PD y se calcula el porcentaje. De esta forma el PD es el 100%. CONT es un 93.7% mejor que el PD, un 0.9% mejor que el TANH y un 0.7% mejor que el ATAN. De esta gráfica se observa claramente que el menos favorable es el PD.
-0.2 0 0.2 0.4 0.6 0.8-1
-0.8
-0.6
-0.4
-0.2
0
X(m)
Y(m
)
CONT
TANH
ATAN
PD
Figura 2. Trayectoria descrita por los controladores
Controlador 2L
Posición 2L
Velocidad 2L
Aceleración
CON 0.39 3.93 86.80
TANH 0.45 8.24 95.90
ATAN 0.43 7.69 89.30
PD 6.10 7.21 1678.50
Tabal 3: Norma 2L para la posición velocidad y
aceleración
Tomando como base el PD para el cálculo del porcentaje de 2L de la velocidad, el de
menor desempeño es el TANH y el mejor es el CONT. CONT es un 45.4% mejor que el PD, 59.7% mejor que el TANH y 52.1% mejor que el ATAN. En las simulaciones se obtiene que después de 1s, el torque se mantiene entre -50 y 30Nm para la articulación 1 y +10Nm para la segunda articulación. El cual es bastante rápido, tomando en cuenta que la trayectoria tiene un periodo de 31.4s. En la Figura 3 se muestra la gráfica del error de posición par los 4 controladores. Como se puede apreciar, la mayoría de los

controladores hacen que el error sea prácticamente cero después de 1.5s.
0 0.5 1 1.5 2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Tiempo (s)
Gra
do
s (
°)
CONT
TANH
ATAN
PD
Figura 3. Respuesta del error de posición
6. Conclusiones En este trabajo se mostró una comparación de 4 controladores de trayectoria, con base en los parámetros dinámicos de un robot de 2 grados de libertad y un simulador matemático. Con las simulaciones obtenidas, se puede ver que a simple vista no hay mucha diferencia entre los 4 controladores. Sin embargo, cuando se le aplica la norma 2L ,
se nota que el controlador propuesto es el que tiene mejor desempeño. Como trabajo a futuro, se espera realizar la comprobación experimental con el robot del laboratorio de robótica de la BUAP, así como hacer la demostración matemática de la estabilidad del controlador propuesto. 7. Referencias [1] Koditschek, D. E, “Natural motion for robot arms”, Proceedings of the IEEE 23th Conference on Decision and Control, Las Vegas, NV, December, pp. 733-735, 1984. [2] Wen, J. T. Bayard., “New class of control law for robotic manipulators. Part 1: Non-
adaptive case”, International Journal of Control, Vol 47, No. 5, pp 1361-1385, 1988 [3] Kelly, R., Carelli, R., “Unified approach to adaptive control of robotic manipulators”, Proceedings of the 27th IEEE Conference on Decision and Control, Vol. 1, pp 1598-1603, 1988. [4] Kelly, R., Carelli, R., “Unified approach to adaptive control of robotic manipulators”, Proceedings of the 27th IEEE Conference on Decision and Control, Austin, TX, December, Vol. 1, pp 1598-1603, 1988. [5] Kelly, R., Santibáñez, V., Reyes, F., On Saturated Derivative Feedback With Adaptive Gravity Compensation of Robot Manipulators, International Journal of Adaptive Control and Signal Processing, vol. 10, pag 465-479, (1996). [6] Oviedo, L., Reyes F., and Sánchez P., Stability Proof of a New Motion Controller using Strong Lyapunov Function, 5th International Symposium on Robotics and Automation 2006, Pag 1-6. [7] F. Hugo Ramírez, Fernando Reyes & Rubí Salazar; “A New Family of Saturated Regulators for Robot Manipulators”; Proceedings of Tenth IASTED International Conference CONTROL AND APPLICATIONS (CA 2008), Pag 102 – 105. [8] Kelly, R., Santibáñez, V. (2003), Control de Movimiento de Robots Manipuladores, España, Editorial Prentice Hall [9] Reyes, F., Kelly, R., On Parameter Identification of Robot Manipulators, Proceedings of 1997 IEEE International Conference on Robotics and Automation, Alburquerque, New Mexico; pag 1910-1915