Rexroth Funk-Akkuschrauber Nexo
266
Atornillador de batería con control remoto Nexo de Rexroth Versión AE ES Planificación de proyecto 3 608 870 A47/05.2017 <Sustituya esta área para figuras por su figura del producto>
Transcript of Rexroth Funk-Akkuschrauber Nexo

Atornillador de batería con control remoto Nexo de Rexroth
Versión AEES
Planificación de proyecto3 608 870 A47/05.2017
<Sustituya esta área para figuras por su figura del producto>

Los datos indicados sirven para la descripción del
producto. En caso de que se ofreciera también
información sobre el uso, esta solo se deberá
comprender como ejemplos de aplicación y
propuestas. Los datos contenidos en el catálogo no
representan características garantizadas. Los datos no
eximen al usuario de realizar sus propias valoraciones y
controles. Nuestros productos están sujetos a un
proceso natural de desgaste y envejecimiento.
© Todos los derechos son propiedad de Bosch
Rexroth AG, también en el caso de indicaciones de
derechos de protección a terceros. Toda autorización,
como derechos de copia o de transmisión, queda bajo
nuestra disposición.
En la portada se muestra un ejemplo de configuración.
Por lo tanto, el producto entregado puede diferir de la
figura.
Las instrucciones de servicio originales están
redactadas en alemán.

3/265 Bosch Rexroth AG | Técnica de atornillado
Título Atornillador de batería con control remoto Nexo de Rexroth
Tipo de documentación Planificación de proyecto
Tipo de documentación DOK-NEXO-DOKU_V1.300-ES
Nota interna de archivo 3 608 870 A47_ES
Propósito de ladocumentación
Esta documentación sirve para la descripción del atornillador de batería con control remoto Nexo de Rexroth.
Copyright © Bosch Rexroth AG, 2017
No ser permite dar a otro este documento, explotarlo o dar a conocer su contenido, siempre y cuando no haya sido autorizado expresamente. Las infracciones de esta prohibición obligan al pago de una indemnización por daños y perjuicios. Están reservados todos los derechos en el caso de concesión de patente o registro de modelo de utilidad (DIN 34-1).
Validez Los datos indicados sirven exclusivamente para la descripción del producto y no han de entender-se como características garantizadas en sí. Nos reservamos el derecho a realizar modificaciones en el contenido de la documentación y posibilidades de suministro de los productos.
Publicado por Bosch Rexroth AG
Electric Drives and Controls
Postfach 1161
D-71534 Murrhardt, Germany
Fornsbacher Str. 92
D-71540 Murrhardt, Germany
Tel.: +49 (0)71 92 22 208
Fax +49 (0)71 92 22 181
www.boschrexroth.com
Aviso Documentación original. Esta documentación está disponible como archivo PDF.
Proceso de modificaciones Versión Situación Observación
3 608 870 A47_AA/ES 07/2013 Versión para el atornillador de batería con control remoto Nexo de Rexroth y el firmware V1000
3 608 870 A47_AB/ES 10/2013 Versión para el atornillador de batería con control remoto Nexo de Rexroth y el firmware V1000
Revisión del texto
3 608 870 A47_AC/ES 02/2015 Versión para el atornillador de batería con control remoto Nexo de Rexroth y el firmware V1100
3 608 870 A47_AD/ES 11/2015 Versión para el atornillador de batería con control remoto Nexo de Rexroth y el firmware V1200
3 608 870 A47_AE/ES 05/2017 Versión para el atornillador de batería con control remoto Nexo de Rexroth y el firmware V1300
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

4/265 Bosch Rexroth AG | Técnica de atornillado

Técnica de atornillado | Bosch Rexroth AG 5/265
Índice
1 Acerca de esta documentación 9
1.1 Vista general sobre esta documentación . 101.2 Validez de la documentación . . . . . . . . . . . . 101.3 Documentación adicional . . . . . . . . . . . . . . . 101.4 Representación de la información . . . . . . . 101.4.1 Indicaciones de seguridad . . . . . . . . . . . . . . . . . . . . .111.4.2 Símbolos e identificaciones . . . . . . . . . . . . . . . . . . . .121.4.3 Denominaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131.4.4 Abreviaturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
2 Indicaciones de seguridad 17
2.1 Acerca de este capítulo . . . . . . . . . . . . . . . . . 182.1.1 Uso y transmisión de las indicaciones de
seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .182.1.2 Indicaciones para el uso. . . . . . . . . . . . . . . . . . . . . . .192.1.3 Indicaciones para el funcionamiento . . . . . . . . . . . . .202.1.4 Indicaciones para la limpieza . . . . . . . . . . . . . . . . . . .202.1.5 Indicaciones para la conservación y reparación. . . .212.1.6 Indicaciones para la eliminación . . . . . . . . . . . . . . . .21
2.2 Uso conforme a lo previsto . . . . . . . . . . . . . . 212.2.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212.2.2 Ámbitos de uso y aplicación . . . . . . . . . . . . . . . . . . .21
2.3 Uso no conforme a lo previsto . . . . . . . . . . . 222.4 Cualificación del personal . . . . . . . . . . . . . . . 222.5 Indicaciones de seguridad generales . . . . 232.6 Indicaciones de seguridad para el
atornillador de batería con control remoto Nexo de Rexroth . . . . . . . . . . . . . . . . . . . . . . . 24
2.6.1 Indicaciones generales dependientes del producto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
2.6.2 Adhesivo con indicación de advertencia. . . . . . . . . .27
2.7 Indicaciones de seguridad dependientes del producto y de la tecnología para el sistema de atornillado Rexroth 350 . . . . . . 27
2.7.1 Protección contra el contacto con componentes eléctricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
2.7.2 Protección contra descargas eléctricas con tensión baja de protección . . . . . . . . . . . . . . . . . . . . . . . . . . .29
2.7.3 Protección contra movimientos peligrosos. . . . . . . .302.7.4 Protección contra campos magnéticos y
electromagnéticos durante el funcionamiento y el montaje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
2.7.5 Protección contra el contacto con componentes calientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
2.7.6 Protección durante el manejo y el montaje . . . . . . . .332.7.7 Protección en el manejo de baterías . . . . . . . . . . . . .332.7.8 Protección contra conductos bajo presión. . . . . . . .34
3 Introducción 35
3.1 El atornillador de batería con control remoto Nexo . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
3.1.1 Tarjeta MicroSD NX-SD . . . . . . . . . . . . . . . . . . . . . . 363.1.2 Sistema operativo NEXO-OS. . . . . . . . . . . . . . . . . . 373.1.3 Pantalla del atornillador . . . . . . . . . . . . . . . . . . . . . . . 373.1.4 Tecnología de batería Nexo . . . . . . . . . . . . . . . . . . . 423.1.5 Datos técnicos del atornillador. . . . . . . . . . . . . . . . . 443.1.6 Datos técnicos de WLAN. . . . . . . . . . . . . . . . . . . . . 453.1.7 Datos técnicos del escáner de códigos de
barras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2 WLAN (Wireless Local Area Network) . . . . .463.2.1 Punto de acceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.2.2 Modo de infraestructura mediante el controlador
de WLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.2.3 Diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 Posibilidades de conexión del atornillador de batería con control remoto Nexo . . . . . .49
3.3.1 Memorización de resultados sin conexión remota . 493.3.2 Memorización de resultados a través de WLAN . . 503.3.3 Activación y memorización de resultados a través
de la WLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.3.4 Activación del PLC y memorización de resultados
a través de la WLAN . . . . . . . . . . . . . . . . . . . . . . . . . 533.3.5 Activación del bus de campo y memorización
de resultados a través de la WLAN . . . . . . . . . . . . . 543.3.6 Process Quality Manager (PQM) . . . . . . . . . . . . . . . 55
4 Montaje 57
4.1 Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . .584.2 Actividades previas a la puesta en marcha 584.3 Ajuste del cabezal acodado . . . . . . . . . . . . . .594.4 Colocar soporte de par de giro . . . . . . . . . . .614.5 Colocación del accesorio . . . . . . . . . . . . . . . .64
5 Directivas de construcción 65
5.1 Dimensionamiento de una unión atornillada . 66
5.1.1 Fuerza de apriete y deformación de las piezas conectadas, fuerza de operación . . . . . . . . . . . . . . . 66
5.1.2 Determinación del par de giro necesario para el fabricante del la unión atornillada. . . . . . . . . . . . . . . 67
5.1.3 Caso de atornillado (suave – fuerte) . . . . . . . . . . . . 705.1.4 Proceso de atornillado . . . . . . . . . . . . . . . . . . . . . . . 70
5.2 Tiempos de ciclo . . . . . . . . . . . . . . . . . . . . . . . .705.2.1 Duración total de paso de atornillado . . . . . . . . . . . 71
5.3 Compatibilidad con sustancias externas . .715.4 Asistente de planificación . . . . . . . . . . . . . . . .715.4.1 Datos 3D/CAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

6/265 Bosch Rexroth AG | Técnica de atornillado
6 Señales de mando 73
6.1 Señales BMS . . . . . . . . . . . . . . . . . . . . . . . . . . .746.2 Descripción de todas las señales BMS . . . .746.2.1 Señales de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . 746.2.2 Señales de salida. . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7 Servicio de datos 85
7.1 Vista general de la comunicación de resultado de atornillado . . . . . . . . . . . . . . . . .86
7.1.1 Código de identificación (código ID) . . . . . . . . . . . . 86
7.2 Emisión de datos a través de FTP . . . . . . . .877.2.1 Establecimiento y finalización de conexiones
FTP a edición de resultados . . . . . . . . . . . . . . . . . . . 877.2.2 Cantidad de datos y tiempo de transmisión esperado
para archivos de resultados de atornillado. . . . . . . . 88
7.3 Emisión de datos a través de HTTP . . . . . . .897.4 Emisión de datos por medio de File
Share . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .907.5 Rexroth Open Protocol . . . . . . . . . . . . . . . . . .917.5.1 Diagramas de los procesos - Ejemplos . . . . . . . . . . 927.5.2 Creación de mensajes. . . . . . . . . . . . . . . . . . . . . . . . 957.5.3 Mensajes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
7.6 Rexroth IPM Protocol . . . . . . . . . . . . . . . . . . .1637.6.1 Creación de mensajes. . . . . . . . . . . . . . . . . . . . . . . 165
7.7 Protocolo VW-XML . . . . . . . . . . . . . . . . . . . . .1667.7.1 Asignación de las señales BMS. . . . . . . . . . . . . . . 1667.7.2 Particularidades de la edición de resultados
VW-XML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1677.7.3 Proceso de apriete . . . . . . . . . . . . . . . . . . . . . . . . . 167
8 Puesta en marcha 169
8.1 Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . .1708.1.1 Visión general de los pasos de puesta en
marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
8.2 Sistema operativo NEXO-OS . . . . . . . . . . . .1718.2.1 Puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . 1718.2.2 Asignación de las direcciones IP para el atornillador
de batería con control remoto Nexo. . . . . . . . . . . . 172
8.3 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . .172
9 Sistema operativo NEXO-OS 173
9.1 Generalidades del sistema operativo NEXO-OS . . . . . . . . . . . . . . . . . . . . . . . . . . . . .174
9.1.1 Versiones completas . . . . . . . . . . . . . . . . . . . . . . . . 1749.1.2 Actualizar la versión del firmware . . . . . . . . . . . . . . 175
9.2 Inicio del programa . . . . . . . . . . . . . . . . . . . . .1759.2.1 Ventana principal del sistema operativo
NEXO-OS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1779.2.2 Salir del programa . . . . . . . . . . . . . . . . . . . . . . . . . . 179
9.3 Resumen de las funciones . . . . . . . . . . . . . . 1809.4 Análisis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1839.4.1 Valores reales actuales . . . . . . . . . . . . . . . . . . . . . . 1839.4.2 Memoria de valores reales. . . . . . . . . . . . . . . . . . . . 1839.4.3 Curva actual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1849.4.4 Memoria de curvas . . . . . . . . . . . . . . . . . . . . . . . . . . 184
9.5 Modo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1859.5.1 Estructura de la pestaña Modo. . . . . . . . . . . . . . . . 1859.5.2 Pasos del modo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1869.5.3 Modificación del modo. . . . . . . . . . . . . . . . . . . . . . . 186
9.6 Trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1909.6.1 Estructura de la pestaña Trabajo . . . . . . . . . . . . . . 1909.6.2 Pasos de trabajo. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1919.6.3 Crear de nuevo/modificar el trabajo . . . . . . . . . . . . 191
9.7 Programa de atornillado . . . . . . . . . . . . . . . . 1969.7.1 Definición: Función de destino, de supervisión o
adicional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1969.7.2 Estructura de la pestaña Programas . . . . . . . . . . . 1979.7.3 Pasos de los programas de atornillado . . . . . . . . . 1989.7.4 Volver a crear/modificar programa de atornillado . 198
9.8 Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2049.8.1 Fecha y hora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2049.8.2 Cuentas de usuario . . . . . . . . . . . . . . . . . . . . . . . . . 2059.8.3 Pantalla del atornillador . . . . . . . . . . . . . . . . . . . . . . 2079.8.4 Datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2099.8.5 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2249.8.6 Firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2269.8.7 Señales BMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2279.8.8 Contador OK/NOK . . . . . . . . . . . . . . . . . . . . . . . . . 2289.8.9 Código de calidad . . . . . . . . . . . . . . . . . . . . . . . . . . 2299.8.10 WLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2319.8.11 Codificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2369.8.12 LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2379.8.13 Asignación de ID . . . . . . . . . . . . . . . . . . . . . . . . . . . 2399.8.14 Escáner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2399.8.15 Por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2419.8.16 Backup/Restore . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
9.9 Diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . 2429.9.1 Información del sistema . . . . . . . . . . . . . . . . . . . . . . 2429.9.2 Visor de eventos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2429.9.3 Libro de registro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2429.9.4 Estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2439.9.5 Error del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2439.9.6 Registro de servidor web. . . . . . . . . . . . . . . . . . . . . 2449.9.7 Copia de pantalla . . . . . . . . . . . . . . . . . . . . . . . . . . . 2449.9.8 Red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2449.9.9 Protocolo de exportación. . . . . . . . . . . . . . . . . . . . . 245
9.10 Menú ayuda . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
10 Proceso de apriete 247
10.1 Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . 24810.2 Proceso de apriete con par de apriete
controlado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24910.3 Proceso de apriete con ángulo de giro
controlado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

Técnica de atornillado | Bosch Rexroth AG 7/265
11 Tratamiento de errores 253
11.1 Clases de código de error y clases de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
11.1.1 Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25411.1.2 Tabla de asignación de código de error . . . . . . . . 25411.1.3 Clases de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
11.2 Detección de errores y confirmación con el sistema operativo NEXO-OS . . . . . . . . . 255
11.2.1 Listas de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . 25511.2.2 Error WLAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
11.3 Lista completa de errores . . . . . . . . . . . . . . 25611.4 Sustitución de componentes
defectuosos . . . . . . . . . . . . . . . . . . . . . . . . . . 25911.5 Reducción de la alimentación eléctrica al
cambiar la batería . . . . . . . . . . . . . . . . . . . . . 259
12 Contrato de licencia 261
13 Servicio técnico y distribución 263
13.1 Servicio técnico . . . . . . . . . . . . . . . . . . . . . . . 26313.2 Distribución . . . . . . . . . . . . . . . . . . . . . . . . . . . 26413.3 Internet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

8/265 Bosch Rexroth AG | Técnica de atornillado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

1 Acerca de esta documentación
En este capítulo se encuentra información general sobre la presente documentación.
• Vista general sobre esta documentación (página 10)• Validez de la documentación (página 10)• Documentación adicional (página 10)• Representación de la información (página 10)

10/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
1.1 Vista general sobre esta documentación
Esta documentación describe el sistema de atornillado en los siguientes capítulos:
1.2 Validez de la documentación
Toda la información del presente documento se refiere al atornillador de batería con control remoto Nexo de Rexroth.
El atornillador de batería con control remoto Nexo de Rexroth se puede conectar al sistema de atornilla-do 350 de Rexroth y operar con una versión de software igual o superior V2.300.
1.3 Documentación adicional
Observe también las instrucciones actuales de todos los componentes del sistema de atornillado y la documentación del fabricante de la máquina o de la instalación.
Encontrará la documentación actual sobre la planificación de proyecto, así como documentación más de-tallada en el directorio de medios en: www.boschrexroth.com/various/utilities/mediadirectory/index.jsp?publication=NET
Además, observe los reglamentos legales de validez general u otros reglamentos vinculantes de la legislación nacional o europea, así como las normativas vigentes en su país sobre prevención de ac-cidentes y protección del medio ambiente.
1.4 Representación de la información
En este apartado se muestra cómo se representa la información como, por ejemplo, indicaciones de se-guridad y símbolos, en la presente documentación.
Capítulo Título Contenido
1 Acerca de esta documentación Validez de esta documentación, abreviaturas, identificaciones utilizadas, glosario.
2 Indicaciones de seguridad Medidas de precaución para evitar peligros al manejar sistemas de atornillado Rexroth. Infor-mación sobre la utilización correcta de los sistemas de atornillado Rexroth.
3 Introducción Este capítulo: Definiciones, estructura del sistema, componentes, integración en instalacio-nes completas.
4 Montaje Posibles montajes del atornillador de batería con control remoto Nexo.
5 Directivas de construcción Planificación y estructura de una sistema de atornillado, teniendo en cuenta los casos de atornillado que han de procesarse con el sistema.
6 Señales de mando Señales del sistema de control de los medios de producción (BMS), señales de mando de la célula de atornillado, tablas BMS.
7 Servicio de datos Servicios de datos disponibles, p. ej., intercambio de datos de los resultados del atornillador y códigos de ID, entre el atornillador de batería con control remoto Nexo y otra unidad de control.
8 Puesta en marcha Todos los pasos necesarios para una primera puesta en marcha del atornillador de batería con control remoto Nexo.
9 Sistema operativo NEXO-OS Sistema operativo NEXO-OS basado en buscador: Configuración y control del atornillador de batería Nexo desde cualquier ordenador
10 Proceso de apriete Tipos de pasos individuales de programas de atornillado
11 Tratamiento de errores Búsqueda de errores y eliminación de errores mediante hardware y software, jerarquía de errores con tablas de códigos de error.
12 Contrato de licencia Información de la licencia
13 Servicio técnico y distribución Posibilidades de contactar con Rexroth, fuentes donde encontrar más información sobre sis-temas de atornillado.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 11/265
1.4.1 Indicaciones de seguridad
En esta documentación hay indicaciones de seguridad antes de unas instrucciones de uso que conllevan peligro para personas o daños materiales. Deben cumplirse las medidas descritas para defenderse del peligro.
Las indicaciones de seguridad tienen la siguiente estructura:
• Señal de peligro (triángulo de advertencia): advierte de los peligros
• Palabra de señalización: indica la gravedad del peligro (tipo de peligro)
• Tipo de peligro: denomina el tipo o la fuente del peligro
• Consecuencias: describe las consecuencias de no observar las advertencias
• Prevención: indica cómo se puede evitar un peligro
Símbolos de advertencia (por ejemplo: tensión eléctrica peligrosa): advierten de los peligros y sus consecuencias o de las prohibiciones En esta documentación se utilizan los siguientes símbolos de ad-vertencia:
Las indicaciones de seguridad describen los siguientes tipos de peligro. El tipo de peligro describe el riesgo en caso de incumplimiento de la indicación de seguridad. Las palabras de señalización tienen el siguiente significado:
PALABRA DE SEÑALIZACIÓN
Tipo de PELIGROConsecuencias Defensa
Tabla 1–1: Símbolos de advertencia utilizados
Símbolo SignificadoEste símbolo de advertencia le advierte de peligros para su salud. Observe todas las indicacio-nes de seguridad que siguen a este símbolo, para evitar posibles lesiones o la muerte.
Este símbolo de advertencia le advierte de peligros para su salud, debido a tensiones o corrien-tes eléctricas. Observe todas las indicaciones de seguridad que siguen a este símbolo, para evitar posibles lesiones o la muerte.
PELIGRO
Provocará lesiones personales graves.
ADVERTENCIA
Puede provocar lesiones personales graves.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

12/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
1.4.2 Símbolos e identificaciones
ATENCIÓN
Pueden provocar lesiones o daños materiales.
AVISO
Pueden producirse daños materiales.
Si no se observa esta información puede producirse un empeoramiento del desarrollo del funcionamiento.
Tabla 1–2: Identificaciones utilizadas en la documentación
Símbolo Explicación
Requisito
Cerciórese de que se cumpla el requisito indicado antes de ejecutar los pasos siguientes.
Paso
Este símbolo identifica un paso individual.
1.
2.
3.
Secuencia
Ejecute los pasos indicados en el orden indicado.
Resultado
Este símbolo identifica el resultado de una acción.
Ejemplo Los ejemplos se encuentran en un campo gris e ilustran el hecho anterior.
Un consejo ofrece información adicional que tal vez no sea decisiva para el trabajo con el sistema de atornillado, pero es importante y útil.
Texto azul Las remisiones a otros puntos del texto están marcadas de color azul. En el PDF puede saltar direc-tamente al destino de la referencia cruzada haciendo clic en el punto en cuestión.
Texto en ne-grita
Las partes especiales del texto están resaltadas en negrita. Esto se refiere a elementos de manejo, indicaciones en pantalla o partes de texto importantes.
<n> Los corchetes indican un valor variable para el cual, en un caso concreto, utilizará un valor propio.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 13/265
1.4.3 Denominaciones
DMS Galgas extensiométricas. Dispositivo de medición que modifica su resistencia eléctrica con pequeñas deformaciones, por lo que se utiliza como sensor de galgas.
Factor de filtro del par Parámetro adicional para la determinación de gradientes.
Tarjeta MicroSD NX-SD La tarjeta MicroSD NX-SD insertada en el atornillador de batería con control remoto Nexo contiene documentación e información de la licencia en su estado de entrega.
Almacenamiento enanillo
En el almacenamiento en anillo hay disponible un espacio de almacenamiento limitado. Si se necesita más espacio, se sobrescriben los datos más antiguos.
Proceso de atornillado Se denomina proceso de atornillado a todo el proceso de atornillado observando los diferentes pasos del programa de atornillado parametrizados de forma individual (como p. ej. "encontrar", "atornillar", "apretar" etc.) hasta alcanzar la función de destino (par, ángulo etc.).
Aplicación de atornillado Dentro de una aplicación de atornillado (utilizado también aplicación) se coordinan desde 1 hasta como máximo 40 canales de atornillado.
Canal de atornillado Se entiende por atornillador de batería con control remoto Nexo el propio atornillador.
Un canal de atornillado en el sistema de atornillado 350 engloba los componentes necesarios para un atornillado. Todo el husillo atornillador, el control, el módulo de potencia y la conexión de potencia incluidos.
Programa de atornillado El programa de atornillado coordina el proceso de atornillado/secuencia de atornillado. Se subdivide en diferentes pasos de atornillado en los que se determinan los parámetros de atornillado.
Lugar de atornillado El lugar de atornillado señala el lugar definido en el que se realiza el atornillado con un canal de ator-nillado y un programa de atornillado.
Sistema de atornillado Un sistema de atornillado es un sistema completo con todos los canales de atornillado que son ne-cesarios para el atornillado del caso de atornillado definido.
Célula de atornillado El atornillador de batería con control remoto Nexo en una célula de atornillado individual, que dispone de una interfaz de datos para la comunicación con un programa de manejo o con la otra unidad de control.
Par de límite El par de límite es una medida auxiliar para la medición del ángulo de giro para una función de destino o de supervisión. La supervisión de función del ángulo se inicia tan pronto como el par de giro medido en el tornillo alcanza el valor determinado como par de límite. Después de esto, el par de límite, con excepción de la corrección del ángulo, no tienen ningún tipo de influencia en el proceso de atornilla-do.
Ángulo de cuerda El ángulo de cuerda es un parámetro adicional para determinar las gradientes.
Control En caso del atornillador de batería con control remoto Nexo se entiende como control la unidad de control de atornillado integrada en el atornillador de batería con control remoto Nexo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

14/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
1.4.4 Abreviaturas
En la documentación a continuación se utilizan las siguientes abreviaturas:
Función de supervisión La función de supervisión mediante el control de un parámetro de supervisión durante el proceso de atornillado el cumplimiento de (p. ej., gradiente) controla el cumplimiento de los valores límite supe-riores e inferiores.
Si la función de supervisión está conectada, la violación de los valores límite provoca la finalización inmediata del paso de atornillado. Si los canales están conectados, coloca los resultados del paso a NOK, incluso si se ha alcanzado el parámetro de destino.
Parámetro desupervisión
El parámetro de supervisión es la magnitud de medida (p. ej., gradiente) de un paso de atornillado, que hay que cumplir dentro de unos límites específicos en un proceso de atornillado. La violación de dichos límites puede provocar la finalización del paso de atornillado.
Corrección del ángulo La corrección del ángulo es un parámetro adicional a la medición del ángulo de giro. Puesto que el ángulo de giro no se mide directamente en el tornillo, sino por encima del cabezal de salida, debido a la torsión del cabezal de salida bajo el par de giro se llega a una pequeña desviación entre el ángulo medido y el ángulo en el tornillo. Al final del proceso de atornillado (¡nunca durante el atornillado!), dicha desviación puede evitarse mediante la corrección del ángulo. Entonces se tomará como pará-metro final y de supervisión el valor del ángulo medido tras rebasar el par de límite, al final del atorni-llado (para entonces ya ha cesado la torsión del cabezal de salida).
Función de destino La función de destino controla el desarrollo del proceso supervisando el parámetro de destino (p. ej., par de giro) de un paso de atornillado y conduce a la finalización del paso, cuando el parámetro al-canza su destino.
Parámetro de destino El parámetro de destino es la magnitud de medida (p. ej., par de giro) de un paso de atornillado, que tiene que alcanzar un valor determinado (valor de destino) para realizar correctamente un proceso de atornillado. Al alcanzar el valor de destino se considera el paso de atornillado por finalizado.
Función adicional La función adicional determina más parámetros para el paso de atornillado. Las funciones adicionales influyen en el proceso de atornillado (p. ej., retraso del arranque, determinación de las revoluciones), pero no lo pueden interrumpir. No realizan ningún análisis OK/NOK.
Parámetro adicional Los parámetros adicionales son los parámetros de un paso de atornillado, que tienen influencia en el proceso de atornillado (p. ej., revoluciones teóricas, par de límite), pero que no puede interrumpir el proceso de atornillado.
Tabla 1–3: Abreviaturas para los componentes del atornillador de batería con control remoto Nexo
Abreviatura ExplicaciónBT356 Portamódulos Sistema 350 para máx. 6 canales de atornillado
BS350 Sistema operativo 350
CS Sistema compacto
ES Atornillador manual ErgoSpin
HMI Human Machine Interface
IL Lógica integrada
KE350 Unidad de comunicación Sistema 350 sin interfaz DVI
KE350G-IL Unidad de comunicación Sistema 350 con interfaz DVI y unidad lógica integrada
LT35x Módulos de potencia dependientes del tamaño constructivo para tecnología de atornillado es-tacionaria Sistema 350
LTS350D Módulo de potencia para husillo atornillador
LTU350/1 Módulo de potencia para ErgoSpin Sistema 350
LTE350D Módulo de potencia para ErgoSpin Sistema 350
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 15/265
MC/DMC Transductor de medición
NK350 Acoplador de red Sistema 350
NK350S Acoplador de red sistema 350 con alimentación de tensión
NXA Atornillador en ángulo Nexo
NXP Atornillador de pistola Nexo
SB356 Caja de sistema Sistema 350 para máx. 6 canales de atornillado
SE352 Control Sistema 350 para funcionamiento con dos canales
SE352M Control Sistema 350 para funcionamiento con dos canales, con ranura para módulo B
PLC Control programable de memoria
Tabla 1–3: Abreviaturas para los componentes del atornillador de batería con control remoto Nexo
Abreviatura Explicación
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
16/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

2 Indicaciones de seguridad
Este capítulo describe los requisitos de seguridad básicos para el trabajo con el sis-tema de atornillado 350 de Rexroth y el atornillador de batería con control remoto Nexo de Rexroth (también denominado sistema de atornillado Rexroth). Contiene información importante necesaria para el uso seguro del sistema de atornillado Rexroth.
• Acerca de este capítulo (página 18)• Uso conforme a lo previsto (página 21)• Uso no conforme a lo previsto (página 22)• Cualificación del personal (página 22)• Indicaciones de seguridad generales (página 23)• Indicaciones de seguridad para el atornillador de batería con control remoto Nexo
de Rexroth (página 24)• Indicaciones de seguridad dependientes del producto y de la tecnología para el
sistema de atornillado Rexroth 350 (página 27)

18/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.1 Acerca de este capítulo
2.1.1 Uso y transmisión de las indicaciones de seguridad
No instale componentes ni ponga en servicio el sistema de atornillado Rexroth antes de haber leído aten-tamente toda la documentación suministrada. Las presentes instrucciones de seguridad y todas las de-más indicaciones para el usuario se deberán leer antes de iniciar cualquier trabajo con el sistema de atornillado Rexroth. En caso de no disponer de indicaciones para el usuario para el sistema de atornillado Rexroth y sus componentes, sírvase consultar a su representante o distribuidor Bosch Rexroth. Solicite el envío inmediato de la documentación en cuestión al/a los responsable(s) del funcionamiento seguro del sistema de atornillado Rexroth.
En caso de venta, préstamo u otro tipo de cesión del sistema de atornillado Rexroth y sus componentes dentro de la Unión Europea (UE), estas indicaciones de seguridad se deberán entregar igualmente en el idioma de un país de la Unión Europea.
ADVERTENCIA
¡Peligro de lesiones!¡Un manejo inadecuado del sistema de atornillado Rexroth y sus componentes, así como el incumpli-miento de las advertencias aquí indicadas y la ejecución de intervenciones inadecuadas en el dispo-sitivo de seguridad pueden causar daños materiales, lesiones corporales, descargas eléctricas y, en casos extremos, incluso la muerte! Observe las indicaciones de seguridad.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 19/265
2.1.2 Indicaciones para el uso
Antes de la primera puesta en marcha del sistema de atornillado Rexroth y sus componentes, lea las si-guientes indicaciones para evitar lesiones corporales o daños materiales. Estas indicaciones de seguri-dad se deberán cumplir en todo momento.
• Bosch Rexroth AG no asume responsabilidad alguna en caso de daños causados por no observar las advertencias contenidas en la presente documentación, así como en las documentaciones de to-dos los componentes del sistema de atornillado Rexroth.
• Antes de la puesta en marcha es obligatoria la lectura de las indicaciones para el funcionamiento, el mantenimiento y la seguridad. En caso de que la documentación no fuera comprendida perfectamen-te en el idioma disponible, sírvase consultar al proveedor e informarle al respecto.
• El funcionamiento correcto y seguro del sistema de atornillado Rexroth y sus componentes presupo-ne la ejecución adecuada y correcta del transporte, el almacenamiento, el montaje y la instalación, así como el manejo y la conservación cuidadosos.
– Compruebe si el producto tiene defectos visibles, como por ejemplo fisuras en la carcasa, o le faltan tornillos o juntas.
– Antes de la puesta en marcha asegúrese de que los cierres y conexiones de enchufe estén co-rrectamente montados y no estén dañados para evitar que penetren líquidos o cuerpos extraños en el producto.
– Asegúrese de que todas las conexiones eléctricas estén ocupadas o cerradas. Ponga en marcha sólo un producto completamente instalado.
– Utilice los productos Rexroth exclusivamente dentro de los límites de potencia indicados en los datos técnicos correspondientes.
– Bajo ninguna circunstancia someta los productos Rexroth a esfuerzos mecánicos no permitidos. Nunca utilice los productos Rexroth como asa o escalón. No coloque objetos encima de los pro-ductos Rexroth.
• Utilice únicamente los accesorios y repuestos autorizados por el fabricante.
• Deberán observarse las normas y disposiciones de seguridad del país en el cual se utilizan el sistema de atornillado Rexroth y sus componentes.
• Los componentes del sistema de atornillado Rexroth están previstos para la instalación en máquinas que se utilizan en ámbitos industriales.
• Deberán cumplirse las condiciones ambientales especificadas en la documentación de producto del componente en cuestión.
– Deje que los componentes nuevos se aclimaten durante algunas horas antes de ponerlos en mar-cha; de lo contrario podría, p. ej., condensarse agua en carcasas de mando.
– Asegúrese de que todas las conexiones eléctricas estén ocupadas o cerradas. Sólo se permite poner en marcha un componente completamente instalado.
• Las aplicaciones relevantes para la seguridad sólo se permiten si están indicadas expresa y clara-mente en la documentación del proyecto. Si éste no es el caso, quedan excluidas. Como relevantes para la seguridad se consideran todas las aplicaciones que puedan producir peli-gros para las personas y daños materiales.
• Los datos sobre el uso de los componentes suministrados contenidas en la documentación del pro-ducto sólo representan ejemplos de aplicación y propuestas.El fabricante de la máquina y el constructor de la instalación deberán comprobar por sí mismos la aptitud
– de los componentes suministrados para su aplicación individual y los datos sobre su uso conte-nidos en la documentación correspondiente,
– adaptarlos a las normativas de seguridad y normas vigentes para su aplicación y ejecutar las me-didas, modificaciones y complementaciones necesarias.
• La puesta en marcha de los componentes suministrados queda prohibida hasta que se haya cons-tatado que la máquina o instalación en la cual se encuentran instalados cumple las disposiciones, normativas de seguridad y normas específicas del país para la aplicación en cuestión.
• Su uso sólo se permite en caso de cumplimiento de las normativas de CEM nacionales para el caso de aplicación concreto.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

20/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
• Las indicaciones para una instalación conforme a CEM figuran en la documentación del componente en cuestión. El cumplimiento de los límites exigidos por las normativas nacionales es responsabilidad del fabri-cante de la instalación o máquina.
• Los datos técnicos y las condiciones de conexión e instalación deberán tomarse de la documenta-ción del producto en cuestión y cumplirse estrictamente.
• No está prevista la conexión directa del sistema CS351 compacto a la alimentación de baja tensión pública, sino el servicio en un entorno industrial (clase de emisión A).
Normativas específicas del país que el usuario debe cumplir• Países europeos:
– las Normas europeas EN correspondientes
• Estados Unidos de América (EE.UU.):
– Normas nacionales de electricidad (NEC),
– Asociación nacional de los fabricantes de componentes eléctricos (NEMA), así como normas de construcción regionales
• Canadá
– Canadian Standards Association (CSA)
• Otros países:
– International Organization for Standardization (ISO)
– International Electrotechnical Commission (IEC)
2.1.3 Indicaciones para el funcionamiento
Deberá observarse la normativa vigente sobre prevención de accidentes y protección del medio ambiente en el país de utilización y en el lugar de trabajo.
En la zona de funcionamiento inmediata de la instalación permita el acceso sólo a las personas autoriza-das por la empresa explotadora. Esto también se aplica mientras la instalación está parada.
En caso de emergencia, avería o cualquier otra irregularidad, desconecte la instalación y protéjala contra la reconexión.
El sistema electrónico de control y de potencia de la técnica de atornillado Rexroth sólo debe utilizarse en redes con puesta a tierra. El funcionamiento en redes no conectadas a tierra (red IT) no está permitido, ya que los espacios de aire y las líneas de fuga del sistema pueden sobrecargarse. La medida de protec-ción admisible en estos casos según EN 50178 es la protección por puesta a tierra. Los cables de ali-mentación al sistema electrónico de control y de potencia deben tener un conductor protector (PE).
Preste atención a que exista una conexión equipotencial entre la pieza y el atornillador, así como su placa de alojamiento, para que quede garantizada la conexión equipotencial de todos los componentes del sis-tema.
Proteja la instalación mediante una protección por fusible del propietario contra cortocircuitos de los ca-bles de conexión.
2.1.4 Indicaciones para la limpieza
Observe las siguientes indicaciones para garantizar las clases de protección IP de los componentes (IP 54 en estado montado):
Cierre todas las aberturas de los componentes en el sistema de atornillado Rexroth con los disposi-tivos de protección adecuados para que no penetre ningún producto de limpieza en el sistema.
Nunca utilice disolventes o productos de limpieza agresivos.
Para la limpieza no utilice ningún limpiador de alta presión.
Observe también las indicaciones para la limpieza contenidas en las instrucciones de manejo del compo-nente de sistema correspondiente.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 21/265
2.1.5 Indicaciones para la conservación y reparación
Realice los trabajos de mantenimiento prescritos en los intervalos de tiempo indicados en las instruc-ciones de manejo del componente de sistema correspondiente.
Asegúrese de que no se suelten elementos, conexiones o uniones de conductos mientras la instala-ción esté sometida a presión y tensión.
Proteja la instalación desconectada contra el reencendido.
2.1.6 Indicaciones para la eliminación
Elimine los productos Rexroth según la normativa de su país.
2.2 Uso conforme a lo previsto
2.2.1 Introducción
Los productos de Bosch Rexroth son desarrollados y fabricados conforme al estado actual de la técnica. Antes de su entrega se comprueba su estado de funcionamiento seguro.
Los productos sólo deben utilizarse conforme a lo previsto. En caso de uso no conforme a lo previsto pueden surgir situaciones en las cuales se pueden producir daños materiales y personales.
Antes de utilizar los productos de la empresa Bosch Rexroth deben cumplirse los siguientes requisitos para garantizar el uso correcto de los productos:
Cualquier persona que maneje de alguna manera alguno de nuestros productos debe leer y com-prender las normativas de seguridad correspondientes y las indicaciones acerca del uso correcto.
En caso de que los productos correspondan a hardware, deberán dejarse en su estado original; es decir, no se permite realizar modificaciones constructivas en ellos. No se permite descompilar los productos de software ni modificar sus códigos fuente.
No se permiten la instalación y la puesta en marcha de productos dañados o defectuosos.
Antes de la puesta en marcha debe asegurarse de que se encuentra instalada la versión de firmware actual (release o SP) en los controles.
Debe garantizarse que los productos estén instalados conforme a las normativas indicadas en la do-cumentación correspondiente.
2.2.2 Ámbitos de uso y aplicación
El sistema de atornillado Rexroth es un sistema que permite ejecutar, documentar y analizar atornillados conforme a procesos de libre programación.
AVISO
Calidad estable de la herramientaRecomendación Para una calidad estable de la herramienta, se debe llevar a cabo un examen de la capacidad de
máquinas (MFU, por sus siglas en alemán) en intervalos regulares. Para el MFU, siga la VDE/VDI2645 Página 2 El servicio técnico de Bosch Rexroth oferta estos servicios
En caso de daños causados por un uso incorrecto de los productos, Bosch Rexroth como fabricante no asumirá ningún tipo de garantía, responsabilidad o indemnización; los riesgos en caso de uso incorrecto de los productos corresponden únicamente al usuario.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

22/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.3 Uso no conforme a lo previsto
El uso del sistema de atornillado Rexroth y sus componentes fuera de los ámbitos de aplicación anterior-mente citados o en condiciones de servicio y datos técnicos distintos a los descritos en las documenta-ciones correspondientes se considera como "no correcta".
El sistema de atornillado Rexroth y sus componentes no deben utilizarse:
• si se exponen a unas condiciones de servicio que no correspondan a las condiciones ambientales prescritas. Se prohíbe, p. ej., el funcionamiento debajo del agua, en caso de humedad del aire ele-vada, en caso de variaciones de temperatura extremas o con temperaturas máximas extremas.
• si se utilizan en aplicaciones que no hayan sido autorizadas expresamente por Bosch Rexroth. En este contexto, observe estrictamente la información contenida en las indicaciones de seguridad de la documentación en cuestión.
2.4 Cualificación del personal
Para el manejo de los sistemas de atornillado Rexroth sólo deberá utilizarse personal formado y cualifica-do. Esto significa:
• sólo el personal que disponga de la formación y cualificación correspondiente deberá trabajar en el sistema de atornillado Rexroth o en su proximidad. El personal se considera como cualificado si está familiarizado suficientemente con el montaje, la instalación y el funcionamiento del sistema de ator-nillado Rexroth y sus componentes, así como con todas las advertencias y medidas de precaución conforme a esta documentación y la documentación del componente en cuestión.
• Asimismo, deberá estar formado, instruido o autorizado para conectar y desconectar circuitos eléc-tricos y aparatos conforme a las disposiciones de la ingeniería de seguridad, establecer su puesta a tierra e identificarlos según los requisitos del trabajo. Deberá poseer un equipamiento de seguridad adecuado y estar formado en Primeros auxilios.
• Las personas que montan, manejan, desmontan o se encargan del mantenimiento de los productos Rexroth no deben estar bajo los efectos de alcohol u otras drogas o medicamentos que influyan so-bre la capacidad de reacción.
Acerca de los ámbitos de uso y aplicación del componente en cuestión, véase también la documentación correspondiente.
En caso de daños causados por una programación o configuración inadecuada del sistema de atornilla-do, Bosch Rexroth como fabricante no asumirá ningún tipo de garantía, responsabilidad o indemnización.La responsabilidad y los riesgos de la programación y configuración del sistema de atornillado correspon-den únicamente al usuario.
En los sistemas de atornillado Rexroth sólo deben utilizarse piezas anexas y accesorios permitidos para sistemas de atornillado Rexroth. No deben instalarse ni conectarse componentes no permitidos. Lo mis-mo se aplica a cables y conductos pertenecientes a sistemas de atornillado Rexroth. De lo contrario, se pone en peligro la seguridad de funcionamiento y del sistema.
No está prevista la conexión directa del sistema CS351 compacto a la alimentación de baja tensión pú-blica, sino el servicio en un entorno industrial (clase de emisión A).
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 23/265
2.5 Indicaciones de seguridad generales
Este capítulo describe las indicaciones de seguridad fundamentales y generales para la prevención de accidentes. Estas indicaciones de seguridad advierten contra peligros generales que pueden surgir, p. ej., del uso o de la eliminación del producto (o sus componentes).
PELIGRO
¡Alta tensión eléctrica y corriente de trabajo elevada! ¡Peligro de muerte o lesiones graves por descargas eléctricas!
PELIGRO
¡Movimientos peligrosos! ¡Peligro de muerte, lesiones graves o daños mate-riales por movimientos accidentales de los motores!
ADVERTENCIA
¡Alta tensión eléctrica en caso de conexión incorrecta! ¡Peligro de muerte o lesiones por descargas eléctricas!
ADVERTENCIA
¡Peligro para la salud de personas que lleven marcapasos, implantes metáli-cos y audífonos en la proximidad inmediata de equipos eléctricos!
ATENCIÓN
¡Las superficies de la carcasa del dispositivo pueden estar calientes! ¡Peligro de lesiones! ¡Peligro de quemaduras!
ATENCIÓN
¡Peligro de lesiones en caso de manejo inadecuado! ¡Lesiones por aplasta-miento, cizallamiento, corte, choques o manejo inadecuado de conductos bajo presión!
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

24/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.6 Indicaciones de seguridad para el atornillador de batería con control remoto Nexo de Rexroth
En este capítulo se listan indicaciones de seguridad básicas dependientes de la tecnología utilizada en el producto.
2.6.1 Indicaciones generales dependientes del producto
• La garantía se aplica solo a la configuración suministrada.
• La garantía se extingue en caso de montaje defectuoso, uso no conforme a lo previsto y/o manipu-lación no apropiada.
Uso y manejo de laherramienta eléctrica
ATENCIÓN
¡Manejo inadecuado!Daños materiales y personales Mantenga la herramienta eléctrica protegida de la lluvia o de la humedad. La penetración de
agua en la herramienta eléctrica aumenta el riesgo de descarga eléctrica. Asegure la pieza de trabajo. Una pieza de trabajo sujeta mediante un dispositivo de sujeción o
mediante un tornillo de banco estará más segura que sujeta a mano. Sujete la herramienta eléctrica firmemente; no la fije a un tornillo de banco. Al desatornillar y
apretar los tornillos pueden aparecer breves momentos de reacción. Bajo ninguna circunstancia someta la herramienta eléctrica a esfuerzos mecánicos de manera no
permitida. No utilice nunca la herramienta eléctrica a modo de palanca o de martillo. No coloque objetos sobre ella.
Antes de realizar trabajos en la herramienta eléctrica (p. ej., mantenimiento, cambio de herra-mienta, etc.), así como durante el transporte y el almacenamiento, coloque el interruptor selector de programa en posición intermedia. En caso de accionamiento accidental del interruptor de encendido/apagado, existe peligro de lesiones.
Utilice la herramienta eléctrica únicamente con la cubierta de interfaces cerrada.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 25/265
Uso y manejo de laherramienta eléctrica
con batería ATENCIÓN
¡Manejo inadecuado!Daños materiales y personales Retire la batería antes de realizar ajustes mecánicos en el producto, de cambiar piezas auxiliares
o de no utilizar la herramienta eléctrica durante un período prolongado de tiempo. Estas medidas de precaución evitan la puesta en marcha accidental de la herramienta eléctrica.
Utilice únicamente baterías originales Rexroth NX-BP36V. Si se utilizan otras baterías, p. ej. bate-rías de imitación, modificadas o de otros fabricantes, existe peligro de lesiones y daños materia-les por explosión de las baterías.
La batería se suministra parcialmente cargada. Para garantizar un rendimiento óptimo de la bate-ría, realice una carga completa antes del primer uso.
Cargue la batería únicamente en el cargador recomendado por el fabricante. Existe peligro de incendio al utilizar un cargador recomendado para un tipo determinado de baterías con otras baterías diferentes.
Utilizar la batería únicamente junto con su herramienta eléctrica Rexroth. Solo de este modo se protegerá la batería de sobrecargas peligrosas.
Utilice en la herramienta eléctrica únicamente las baterías previstas para ello. El uso de otras baterías puede provocar lesiones y peligro de incendio.
Mantenga la batería protegida de la lluvia o de la humedad. Existe peligro de cortocircuito. Proteja la batería del calor, p. ej. también de la radiación solar continuada y del fuego. Existe peli-
gro de explosión. En caso de daños o uso no conforme a lo previsto, pueden emanar vapores de la batería. Deje
entrar aire fresco y, en caso de molestias, acuda al médico. Los vapores pueden irritar las vías respiratorias.
En caso de uso incorrecto puede salir líquido de la batería. Evite el contacto con el líquido. En caso de contacto accidental, aclarar con agua. En caso de que el líquido entre en contacto con los ojos, reciba asistencia médica. El líquido que sale de la batería puede provocar irritaciones de la piel o abrasiones.
No ponga la batería en cortocircuito. Existe peligro de explosión. No abra la batería. Existe peligro de cortocircuito. Mantenga las baterías no utilizadas alejadas de clips, monedas, llaves, clavos, tornillos u otros
pequeños objetos metálicos que puedan causar un puente en los contactos. Existe peligro de cortocircuito.
No ponga en funcionamiento la batería en caso de daños en la carcasa o en los contactos. Existe peligro de cortocircuito.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

26/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Uso de la herra-mienta eléctrica conescáner de códigos
de barras
Protección contramanejo inadecuado
del atornilladormanual
Protección contrapérdida de datos
No introducir o extraer nunca la tarjeta MicroSD NX-SD bajo tensión.
ATENCIÓN
Radiación láser – clase de láser 2. Emisión de luz en zona visible.
La visión directa de la fuente de luz del escáner del código de barras (láser clase 2 con diodo de energía baja) puede dañar los ojos (la retina). No mire directamente al rayo láser. No manipule la fuente del láser, puesto que esto puede conllevar la salida incontrolada de radia-
ción láser peligrosa. No cambie los valores indicados, puesto que esto puede conllevar la salida incontrolada de
radiación láser peligrosa.
LaserstrahlungNicht in den Strahl blicken
Laser Klasse 2nach DIN EN 60825-1:2001-11
LASER LIGHTDO NOT STARE INTO THE BEAM
CLASS 2 LASER PRODUCTLASERSTRAHLUNG
NICHT IN DEN STRAHL BLICKENLASER KLASSE 2LUMIÉRE LASER
NE PAS REGADER DANS LE FAISCEAUAPPAREIL Á LASER DE CLASSE 2
630-670 nm, 1,7 mW
ATENCIÓN
¡Manejo inadecuado! Compruebe que las piezas móviles del aparato funcionen correctamente y no se bloqueen, ase-
gúrese de que no estén rotas o dañadas de forma que no puedan afectar al funcionamiento del atornillador manual. Haga reparar las piezas dañadas antes de la utilización del atornillador.
Utilice el atornillador manual, sus accesorios, herramientas insertables, etc. de acuerdo con estas instrucciones y del modo prescrito para este tipo especial de aparatos. Al hacerlo, tenga en cuenta las condiciones de trabajo y la actividad que se ha de realizar.
No se sobrestime. Procure una situación segura y mantenga en todo momento el equilibro. No sobrecargue el atornillador manual. Cuide con esmero el atornillador manual.
ATENCIÓN
¡Peligro de lesiones por las piezas móviles!La ropa holgada, las joyas o el pelo largo pueden engancharse en las piezas móviles. Lleve ropa apropiada. No lleve ropa holgada o joyas. Mantenga el pelo, la ropa y los guantes retirados de las piezas móviles.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 27/265
2.6.2 Adhesivo con indicación de advertencia
2.7 Indicaciones de seguridad dependientes del producto y de la tecnología para el sistema de atornillado Rexroth 350
2.7.1 Protección contra el contacto con componentes eléctricos
El contacto con elementos con tensiones superiores a los 50 V puede ser peligroso para las personas y producir una descarga eléctrica. Durante el funcionamiento de los aparatos eléctricos es inevitable que determinadas partes de dichos aparatos se encuentren bajo tensiones peligrosas.
Tabla 2–1: Significado de los símbolos
Símbolo Significado Lea todas las indicaciones de seguridad e instrucciones.
Las negligencias a la hora de cumplir las indicaciones de seguridad y las instrucciones pueden pro-vocar descargas eléctricas, incendios y/o lesiones graves.
Solo para países de la UE:
Según la Directiva 2002/96/CE y la Directiva 2006/66/CE, las herramientas eléctricas que ya no estén listas para su uso y las baterías/pilas defectuosas o gastadas deben desecharse por sepa-rado y reciclarse de manera respetuosa con el medio ambiente.
Este apartado sólo afecta a los aparatos y componentes con tensiones superiores a los 50 V.
PELIGRO
¡Alta tensión eléctrica!¡Peligro de muerte, riesgo de lesiones por descargas eléctricas o lesiones corporales graves! El manejo, el mantenimiento o la reparación de este aparato sólo deben ser ejecutados por per-
sonal formado y cualificado para el trabajo en o con aparatos eléctricos. Obsérvense las normas de construcción y de seguridad generales para el trabajo en instalacio-
nes de alta intensidad. Antes de encender el aparato es necesario establecer la conexión fija del conductor protector en
todos los aparatos eléctricos conforme al esquema de conexión. El funcionamiento, incluso para fines de medición y comprobación de corta duración, sólo se
permite con el conductor protector conectado fijamente en los puntos previstos al efecto en los componentes.
Antes de acceder a elementos eléctricos con tensiones superiores a 50 voltios, separar el apa-rato de la red o de la fuente de tensión. Asegurarlo contra la reconexión.
Después de desconectar la tensión de red es necesario esperar 10 segundos hasta que el sis-tema se haya descargado. Sólo entonces se permite abrir la carcasa o iniciar los trabajos de reparación/mantenimiento.
Obsérvense en componentes de accionamiento y de filtro eléctricos:Después del apagado deberá esperarse a que finalice el tiempo de descarga indicado para los componentes antes de acceder a los equipos. Medir la tensión de los condensadores antes de iniciar los trabajos para excluir cualquier peligro en caso de contacto.
No tocar los puntos de conexión eléctrica de los componentes en estado encendido.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

28/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Obsérvense en componentes de accionamiento y de filtro eléctricos:
Adhesivo con indicación de advertencia
Un adhesivo con indicación de advertencia en el sistema compacto(CS), el portamódulos (BT) y la caja de sistema(SB) indica el peligro de descargas eléctricas (lugar de aplicación: véase la figura 2–1).
Figura 2–1: Adhesivo con indicación de advertencia en el sistema compacto (CS), el portamódulos (BT) y la caja de sistema (SB)
Antes de la conexión, deben montarse en los equipos las cubiertas y los dispositivos de protec-ción previstos para la protección contra el contacto. Antes de la conexión, deben cubrirse y pro-tegerse los elementos bajo tensión para evitar el contacto.
No tocar los puntos de conexión eléctrica de los componentes en estado encendido. ¡No puede utilizarse un dispositivo de protección de corriente en derivación (RCD) para siste-
mas de atornillado multicanal! La protección contra el contacto indirecto debe establecerse de otra manera, por ejemplo mediante un dispositivo de protección contra sobreintensidad con-forme a las normas relevantes.
En aparatos empotrados, la protección contra el contacto directo con elementos eléctricos deberá asegurarse por medio de una carcasa exterior, por ejemplo un armario de distribución.
Usted debe haber leído y comprendido estas instrucciones de manejo antes de utilizar el sistema o iniciar trabajos de servicio técnico/mantenimiento.
Países europeos: según EN 50178/1998, apartado 5.3.2.3.EE.UU.: véanse las Normas nacionales de electricidad (NEC), Asociación nacional de los fabricantes de componentes eléctricos (NEMA), así como las normas de construcción regionales. El usuario deberá cumplir en todo momento la totalidad de los puntos anteriormente citados.
PELIGRO
¡Alta tensión en la carcasa y corriente de fuga elevada!¡Peligro de muerte, peligro de lesiones por descargas eléctricas! Antes de encender el equipo es necesario conectar el equipamiento eléctrico, las carcasas de
todos los aparatos eléctricos y los motores con el conductor protector en los puntos de puesta a tierra o establecer la puesta a tierra. Esto se aplica también antes de efectuar ensayos de corta duración.
Antes de la puesta en marcha, también para fines de ensayo, deberá conectarse siempre el con-ductor protector o establecer la conexión con el conductor de puesta a tierra. De lo contrario, pueden producirse tensiones elevadas en la carcasa que produzcan una descarga eléctrica.
En sistemas de atornillado multicanal: El conductor protector del equipamiento eléctrico y de los equipos debe conectarse siempre de
forma fija y duradera a la red de alimentación. La corriente de fuga es superior a 3,5 mA. utilizar una sección de cobre de mín. 10 mm2 en todo el recorrido del conductor protector.
En sistemas compactos para ErgoSpin:
no es necesaria una sección de cobre de 10 mm2 para el conductor protector; La corriente de fuga es inferior a 3,5 mA.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 29/265
En el sistema compacto, el adhesivo con indicación de advertencia puede verse con la cubierta abierta; en la caja de sistema, con la puerta abierta.
Figura 2–2: Adhesivo con indicación de advertencia en el sistema compacto (CS)
Figura 2–3: Adhesivo con indicación de advertencia en el portamódulos (BT) y la caja de sistema (SB)
2.7.2 Protección contra descargas eléctricas con tensión baja de protección
Todos los bornes y conexiones con tensiones de 5 a 50 V en productos Rexroth corresponden a tensio-nes bajas de protección y están ejecutados a prueba de contacto conforme a las normas de producto.
ADVERTENCIA
¡Tensión eléctrica peligrosa en el interior del equipo!¡Peligro de muerte, peligro de lesiones por descargas eléctricas! Desconecte el equipo. Separe el equipo de la red eléctrica.
Sistema compacto (CS): Antes de abrir el equipo o iniciar trabajos de mantenimiento, espere 90 segundos hasta que el
equipo se haya descargado.
Portamódulos (BT) y caja de sistema (SB): Antes de abrir el equipo o iniciar trabajos de mantenimiento, espere 10 segundos hasta que el
equipo se haya descargado. Debe haber leído y comprendido estas instrucciones de manejo antes de iniciar trabajos de man-
tenimiento.
ADVERTENCIA
¡Alta tensión eléctrica en caso de conexión incorrecta!¡Peligro de muerte, peligro de lesiones por descargas eléctricas! A todas las conexiones y bornes con tensiones de 0 a 50 voltios se deben conectar únicamente
equipos, componentes eléctricos y cables que muestren una baja tensión de protección (PELV= Protective Extra Low Voltage).
Sólo deben conectarse tensiones y circuitos que dispongan de una separación segura frente a tensiones peligrosas. Una separación segura se consigue, por ejemplo, por medio de transfor-madores aislantes, optoacopladores seguros o funcionamiento con baterías sin conexión a la red.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

30/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.7.3 Protección contra movimientos peligrosos
Pueden producirse movimientos peligrosos en caso de un control erróneo de motores conectados. Las causas pueden ser diversas:
• cableado incorrecto o poco limpio
• errores en el manejo de los componentes
• entrada errónea de parámetros antes de la puesta en marcha
• errores en los transductores de medición y de señales
• componentes defectuosos
• errores en el software
Estos fallos se pueden producir inmediatamente después de la conexión o al cabo de un tiempo de fun-cionamiento indeterminado.
La vigilancia en los componentes de accionamiento excluye en gran medida un fallo en el funcionamiento de los accionamientos conectados. Sin embargo, con vistas a la protección del personal, particularmente el riesgo de lesiones corporales o daños materiales, no deberá confiarse únicamente en este hecho. Has-ta la activación de los dispositivos de vigilancia incorporados se deberá contar en todo caso con un mo-vimiento incorrecto del accionamiento cuya medida depende del tipo de control y del estado operativo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 31/265
PELIGRO
¡Movimientos peligrosos!¡Peligro de muerte, peligro de lesiones, lesiones corporales graves o daños materiales! Asegure la protección de las personas. Ésta se consigue mediante dispositivos de vigilancia o
medidas jerárquicamente superiores a nivel de la instalación. Estas medidas dependen de las condiciones específicas de la instalación y surgen de un análisis
de peligros y errores. Para ello deberán incluirse las normativas de seguridad aplicables para la instalación. En caso de desconexión, anulación o falta de activación de dispositivos de seguri-dad pueden producirse movimientos incontrolados de la máquina u otros fallos en el funciona-miento.
Prevención de accidentes, lesiones corporales o daños materiales: No se permite la estancia en el área de movimiento de la máquina y sus elementos. Posibles
medidas para impedir el acceso accidental de personas:
– valla protectora
– reja protectora
– cubierta de protección
– barrera de luz Deberá preverse una resistencia suficiente de las vallas y cubiertas para absorber la energía
cinética máxima posible. Los interruptores de parada de emergencia deben disponerse de forma fácilmente accesible en
la proximidad inmediata. Comprobar el funcionamiento del dispositivo de desconexión de emer-gencia antes de la puesta en marcha. En caso de funcionamiento incorrecto del interruptor de parada de emergencia no se permite utilizar el equipo.
Protección contra el arranque accidental mediante un circuito de desconexión de emergencia. Antes de introducir las manos o acceder a la zona de peligro, los accionamientos deben haberse
parado con seguridad. Los ejes verticales deben asegurarse adicionalmente contra la caída o el descenso tras la desco-
nexión del motor mediante:
– bloqueo mecánico del eje vertical
– dispositivo de frenado/retención/bloqueo externo
– compensación suficiente del peso del eje Desconectar la tensión del equipamiento eléctrico a través del interruptor principal y asegurarlo
contra la reconexión en caso de:
– trabajos de mantenimiento y reparación
– trabajos de limpieza
– interrupciones prolongadas del funcionamiento Evitar el funcionamiento de equipos de alta frecuencia, de control remoto y de radiotransmisión
en la proximidad de la electrónica del dispositivo y sus cables de alimentación. En caso de que fuera inevitable el uso de tales aparatos, comprobar el sistema y la instalación antes de la pri-mera puesta en servicio con respecto a posibles fallos de funcionamiento en todas las posicio-nes de uso. En su caso, deberá realizarse una comprobación CEM especial de la instalación.
Instale en los siguientes casos un brazo de reacción en el atornillador manual ErgoSpin:
– ESM a partir de 10Nm
– ESA o ESV a partir de 40Nm Utilice un brazo de reacción para ejecutar atornilladuras con pares elevados mediante un husillo
atornillador manual.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

32/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.7.4 Protección contra campos magnéticos y electromagnéticos durante el funcionamiento y el montaje
Los campos magnéticos y electromagnéticos en el entorno inmediato de conductores bajo tensión e ima-nes permanentes en los motores pueden representar un peligro serio para personas que lleven marcapa-sos, implantes metálicos y audífonos.
2.7.5 Protección contra el contacto con componentes calientes
PELIGRO
¡Peligro para la salud de personas que lleven marcapasos, implantes metáli-cos y audífonos en la proximidad inmediata de equipos eléctricos!Los campos magnéticos y electromagnéticos pueden perturbar y perjudicar el funcionamiento de marcapasos o audífonos, así como de implantes metálicos. Esto puede poner en peligro la salud de las personas afectadas. Las personas que lleven marcapasos e implantes metálicos tienen prohibido el acceso a las
siguientes zonas:
– zonas en las cuales se montan, utilizan o ponen en servicio aparatos y piezas eléctricos
– zonas en las cuales se almacenan, reparan o montan elementos de motor con imanes perma-nentes
Si fuera necesario el acceso de usuarios de marcapasos a estas zonas, la decisión correspon-diente deberá ser tomada previamente por un médico. La resistencia a interferencias de los mar-capasos implantados actualmente o en el futuro varía considerablemente, de modo que no existen reglas con validez general.
Las personas que lleven implantes metálicos o fragmentos de metal, así como los usuarios de audífonos deberán consultar a un médico antes de acceder a las zonas en cuestión, ya que debe preverse allí la posibilidad de perjuicios para la salud.
ATENCIÓN
¡Las superficies en las carcasas de motor y los engranajes pueden estar calientes!¡Peligro de lesiones! ¡Peligro de quemaduras! ¡No tocar las superficies de las carcasas del dispositivo en fuentes de calor calientes! ¡Peligro de
quemaduras! ¡No tocar la superficie de la carcasa de los motores y engranajes! ¡Peligro de quemaduras! Según las condiciones de servicio, las temperaturas durante y después del funcionamiento pue-
den ser superiores a 60 °C (140 °F). Antes del acceso, dejar que los motores se enfríen lo suficiente después de su desconexión. Lleve guantes de protección o no trabaje en superficies calientes. Para determinadas aplicaciones, el fabricante deberá tomar, en la producto final, según las nor-
mas de seguridad, medidas en el producto final, en la máquina o en la instalación con el fin de evitar quemaduras. Estas medidas pueden ser, por ejemplo, las siguientes: advertencias, dispo-sitivos de protección separadores (apantallado o vallado), documentación técnica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 33/265
2.7.6 Protección durante el manejo y el montaje
En condiciones desfavorables, el manejo y el montaje inadecuado de determinados elementos y compo-nentes pueden causar lesiones.
2.7.7 Protección en el manejo de baterías
Las baterías están compuestas de sustancias químicas activas, alojadas en una carcasa sólida. Por esta razón, su manejo inadecuado puede causar lesiones o daños materiales.
ATENCIÓN
¡Peligro de lesiones en caso de manejo inadecuado!Lesiones por aplastamiento, cizallamiento, corte y choques. Observar las normas de construcción y de seguridad generales para el manejo y el montaje. Utilizar dispositivos de montaje y de transporte apropiados. Prevenir el aprisionamiento y el aplastamiento con las medidas oportunas. Utilizar únicamente herramientas adecuadas. Si está prescrito su uso, utilizar herramientas espe-
ciales. Utilizar correctamente los dispositivos de elevación y las herramientas. Si es necesario, utilizar los equipos de protección apropiados (por ejemplo, gafas protectoras,
calzado de seguridad, guantes de protección). No se permite la estancia debajo de cargas suspendidas. Debido al peligro de resbalamiento, recoja inmediatamente los líquidos derramados en el suelo. Coloque los cables y los conductos de manera que no resulten dañados y que nadie pueda tro-
pezar con ellos.
ATENCIÓN
¡Peligro de lesiones en caso de manejo inadecuado!El manejo inadecuado de baterías puede producir explosiones o cauterizaciones que, a su vez, pue-den causar lesiones. No trate de reactivar baterías descargadas calentándolas o con otros métodos (peligro de explo-
sión y corrosión). No se permite recargar las baterías porque se pueden derramar o explotar. No tirar las baterías al fuego. No desmontar las baterías. No dañar los componentes eléctricos incorporados en los equipos.
Protección del medio ambiente y eliminación: las baterías contenidas en el equipo deberán considerarse, conforme a las disposiciones legales, como materias peligrosas en el transporte terrestre, aéreo y maríti-mo (peligro de explosión). Eliminar las baterías usadas separadamente de los demás residuos. Observar las normativas nacionales en el país de instalación.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

34/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
2.7.8 Protección contra conductos bajo presión
Los motores y reguladores de accionamientos refrigerados por líquidos o aire comprimido, así como los sistemas de alimentación que funcionen con aire comprimido pueden abastecerse, conforme a los datos contenidos en la planificación de proyecto, en parte con medios suministrados desde el exterior que se encuentren bajo presión, tales como aire comprimido, aceite hidráulico, líquido refrigerante y lubricante refrigerante. En estos casos, el manejo inadecuado de los sistemas de alimentación externos, los con-ductos de alimentación o las conexiones puede causar lesiones o daños materiales.
ATENCIÓN
¡Peligro de lesiones en caso de manejo inadecuado de conductos bajo pre-sión!El manejo inadecuado de conductos bajo presión puede producir explosiones que, a su vez, pueden causar lesiones. No trate de separar, abrir o cortar conductos que se encuentren bajo presión (peligro de explo-
sión). Observar las normas de funcionamiento de los fabricantes correspondientes. Antes de proceder al desmontaje, descargar la presión y el medio de los conductos. Utilizar los equipos de protección apropiados (por ejemplo, gafas protectoras, calzado de segu-
ridad, guantes de protección). Recoger inmediatamente los derrames de líquido en el suelo.
Protección del medio ambiente y eliminación: los medios utilizados para el funcionamiento del producto pueden ser contaminantes. Eliminar los medios contaminantes separadamente de los demás residuos. Observar las normativas nacionales en el país de instalación.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 Introducción
Este capítulo da una primera vista general sobre las funciones y posibilidades de uti-lización del atornillador de batería con control remoto Nexo.
• El atornillador de batería con control remoto Nexo (página 36)• WLAN (Wireless Local Area Network) (página 46)• Posibilidades de conexión del atornillador de batería con control remoto Nexo
(página 49)

36/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.1 El atornillador de batería con control remoto Nexo
El atornillador de batería con control remoto Nexo está diseñado para atornillados críticos para la segu-ridad de la categoría A según VDI2862. Mediante la memorización y la emisión de resultados de toda la información relevante de atornillado se garantiza una documentación completa.
La electrónica de control y potencia está totalmente integrada en el atornillador. En cada paso de trabajo el control integrado supervisa el atornillado y envía los resultados sin cable a la red disponible. En caso de falta de cobertura los datos se almacenan en la memoria intermedia hasta el momento en que se es-tablezca una conexión a una red, momento en el que serán transmitidos.
En la pantalla gráfica del atornillador se le muestran directamente al usuario, independientemente de su posición y la conexión remota, los resultados del atornillado.
El atornillador de batería con control remoto Nexo dispone de un pack de batería insertable a modo de alimentación de energía. Al cambiar de batería con el atornillador en funcionamiento dentro del margen de tiempo se mantiene la alimentación eléctrica (véase la página 43).
Encontrará más indicaciones para la utilización y la descripción de los componentes en el manual de ins-trucciones "Nexo" suministrado con el producto.
3.1.1 Tarjeta MicroSD NX-SD
El volumen de suministro del atornillador de batería con control remoto Nexo incluye una tarjeta MicroSD que se inserta en el atornillador. En esta tarjeta están guardadas la documentación y la información de la licencia en el estado de entrega.
Puede acceder a la tarjeta MicroSD en el menú Ayuda Acceso tarjeta NX-SD del sistema operativo NEXO-OS.
Por medio del sistema operativo NEXO-OS en la tarjeta MicroSD se puede guardar lo siguiente:
• resultados de atornillado (menú Ajustes Datos Standard Nexo Tarjeta NX-SD);
• copias de seguridad (menú Ajustes Copia de seguridad/restaurar);
• datos de diagnóstico (menú Diagnóstico Protocolo de exportación);
• Figuras para visualizar la pantalla del atornillador. En el menú Ayuda se cargan las figuras que se corresponden con la visualización.
Protección contrapérdida de datos
No introducir o extraer nunca la tarjeta MicroSD NX-SD bajo tensión.
AVISO
¡Formatear memoria de masa solo con FAT32!Otro formateo del módulo de memoria produce fallos en el funcionamiento del sistema al acceder a la tarjeta MicroSD.
AVISO
En función del tipo de tarjeta MicroSD o lote, pueden producirse retrasos al guardar los resultados en el lugar de guardado NX-SD. Estos pueden repercutir en el tiempo de ciclo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
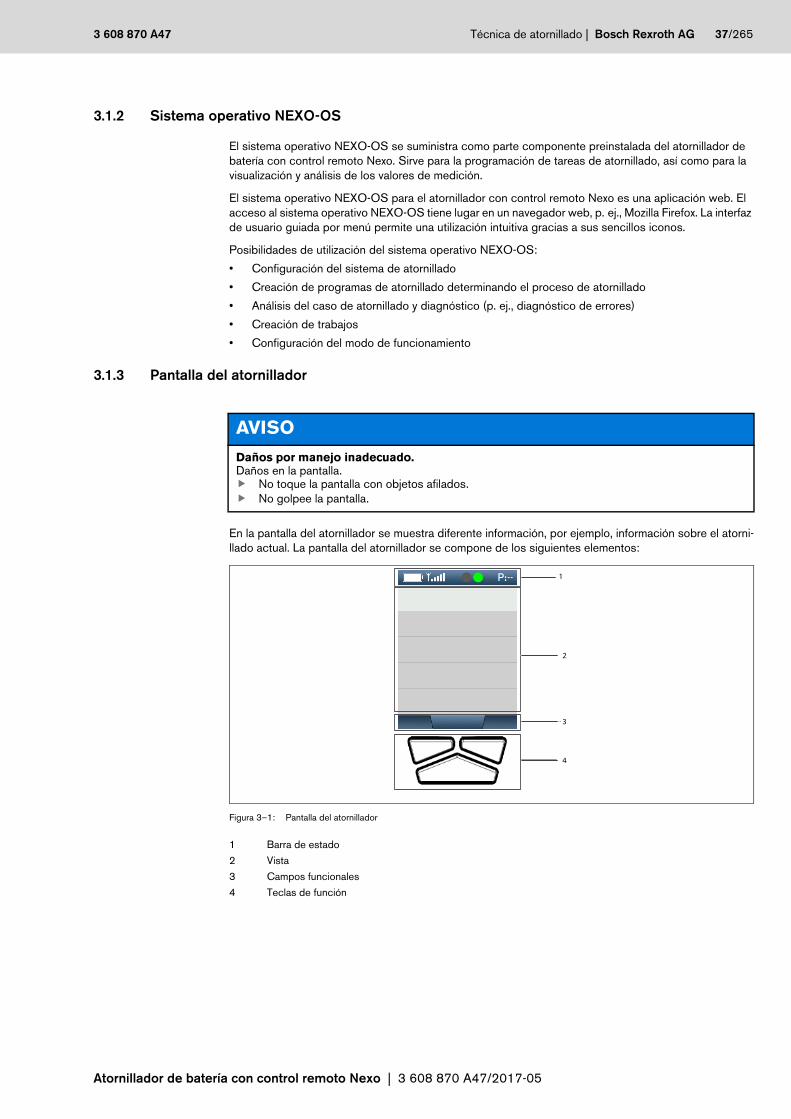
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 37/265
3.1.2 Sistema operativo NEXO-OS
El sistema operativo NEXO-OS se suministra como parte componente preinstalada del atornillador de batería con control remoto Nexo. Sirve para la programación de tareas de atornillado, así como para la visualización y análisis de los valores de medición.
El sistema operativo NEXO-OS para el atornillador con control remoto Nexo es una aplicación web. El acceso al sistema operativo NEXO-OS tiene lugar en un navegador web, p. ej., Mozilla Firefox. La interfaz de usuario guiada por menú permite una utilización intuitiva gracias a sus sencillos iconos.
Posibilidades de utilización del sistema operativo NEXO-OS:
• Configuración del sistema de atornillado
• Creación de programas de atornillado determinando el proceso de atornillado
• Análisis del caso de atornillado y diagnóstico (p. ej., diagnóstico de errores)
• Creación de trabajos
• Configuración del modo de funcionamiento
3.1.3 Pantalla del atornillador
En la pantalla del atornillador se muestra diferente información, por ejemplo, información sobre el atorni-llado actual. La pantalla del atornillador se compone de los siguientes elementos:
Figura 3–1: Pantalla del atornillador
AVISO
Daños por manejo inadecuado.Daños en la pantalla. No toque la pantalla con objetos afilados. No golpee la pantalla.
1 Barra de estado
2 Vista
3 Campos funcionales
4 Teclas de función
1
3
2
4
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

38/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
1 - Barra de estado
2 - Vista
La vista de la pantalla la determinará en el menú Ajustes Pantalla de atornillador del sistema opera-tivo NEXO-OS (véase la página 207).
De manera estándar se muestran aquí los valores reales actuales.
3 - Campos funcionales/4 - Teclas de función
Las funciones individuales del menú se pueden ejecutar mediante las teclas de función correspondientes (izquierda, central, derecha).
Tabla 3–1: Elementos de la barra de estado
Elemento Descripción Muestra el estado de carga actual de las baterías conectadas
WLAN activada. Muestra la intensidad de la señal de la conexión remota
WLAN desactivada.
A partir de la versión 1200 del firmware Nexo se mostrará el estado de las conexiones de da-tos. Para ello active en el menú Ajustes Pantalla de atornillador la casilla de verificación de Mostrar estado de conexiones de datos.
A partir de la versión 1300 del firmware Nexo Mostrar estado de conexiones de datos está activado de forma estándar.
El atornillador está en el modo automático:
– Símbolo verde
Todos los servicios de datos activos están conectados.
– Símbolo rojo
Al menos un servicio de datos no está conectado.
– Símbolo gris
No hay servicios de datos activos.
A partir de la versión 1300 del firmware Nexo.
El atornillador está en el modo manual:
– Símbolo verde
Todos los servicios de datos activos están conectados.
– Símbolo rojo
Al menos un servicio de datos no está conectado.
– Símbolo gris
No hay servicios de datos activos.
Estado operativo del atornillador:
LED izquierdo:
– amarillo fijoLiberación (señales BMS "Enable" o "Active Enable")
LED derecho:
– verde fijoAtornillador listo para funcionar
– amarillo intermitenteAtornillador no listo para funcionar
– rojo intermitenteError del sistema
P:-- Muestra el programa de atornillado actual
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 39/265
Figura 3–2: Asignación de las teclas de función y los campos funcionales
El menú principal se encuentra en la tecla de función central.
A partir de la versión 1200 del firmware Nexo, la posición intermedia del interruptor selector de programa activa la visualización de las señales de entrada BMS 0.3, 0.4 y 0.5 en la pantalla del atornillador y que fueron establecidas en el módulo BMS tool. Se puede establecer cualquier señal de entrada a discreción, véase Señales de entrada en la página 74. Las teclas de función tendrán asignadas las señales BMS co-rrespondientes.
Figura 3–3: Campos funcionales con el interruptor selector de programa en la posición intermedia
Menú principal
En el sistema operativo NEXO-OS, determine en el menú Ajustes Pantalla de atornillador Menú principal qué opciones del menú principal deben visualizarse en la pantalla del atornillador.
Si se sale de la visualización de las señales BMS, es decir, si se pulsa el interruptor selector de programa de la posición intermedia hacia la izquierda o hacia la derecha, se restablecerán las señales de entrada BMS 0.3, 0.4 y 0.5 que fueron establecidas en el módulo BMS tool. Incluso si aún está accionada la tecla de función correspondiente.
En el estado de entrega del atornillador de batería con control remoto Nexo hay algunas opciones del menú principal que ya están activadas. Compruebe qué opciones de usuario deben activarse exactamen-te para que pueda garantizarse un funcionamiento óptimo con el atornillador de batería con control remo-to Nexo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
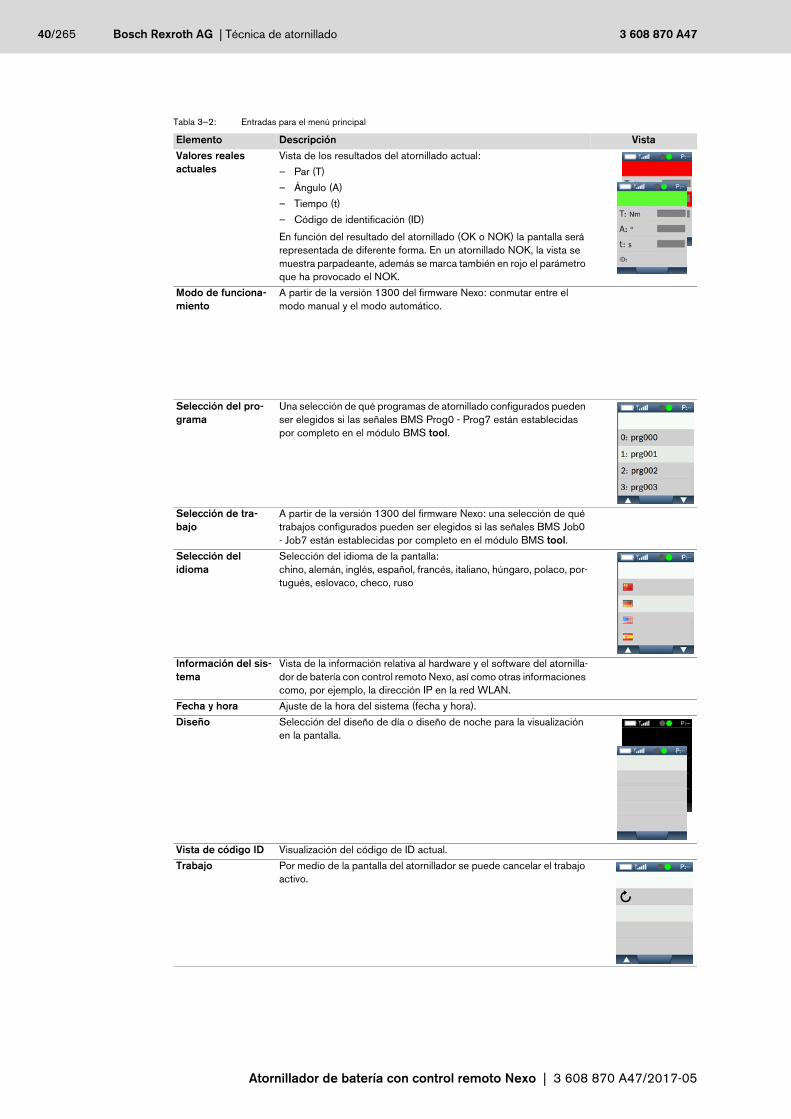
40/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Tabla 3–2: Entradas para el menú principal
Elemento Descripción VistaValores reales actuales
Vista de los resultados del atornillado actual:
– Par (T)
– Ángulo (A)
– Tiempo (t)
– Código de identificación (ID)
En función del resultado del atornillado (OK o NOK) la pantalla será representada de diferente forma. En un atornillado NOK, la vista se muestra parpadeante, además se marca también en rojo el parámetro que ha provocado el NOK.
Modo de funciona-miento
A partir de la versión 1300 del firmware Nexo: conmutar entre el modo manual y el modo automático.
Selección del pro-grama
Una selección de qué programas de atornillado configurados pueden ser elegidos si las señales BMS Prog0 - Prog7 están establecidas por completo en el módulo BMS tool.
Selección de tra-bajo
A partir de la versión 1300 del firmware Nexo: una selección de qué trabajos configurados pueden ser elegidos si las señales BMS Job0 - Job7 están establecidas por completo en el módulo BMS tool.
Selección del idioma
Selección del idioma de la pantalla: chino, alemán, inglés, español, francés, italiano, húngaro, polaco, por-tugués, eslovaco, checo, ruso
Información del sis-tema
Vista de la información relativa al hardware y el software del atornilla-dor de batería con control remoto Nexo, así como otras informaciones como, por ejemplo, la dirección IP en la red WLAN.
Fecha y hora Ajuste de la hora del sistema (fecha y hora).
Diseño Selección del diseño de día o diseño de noche para la visualización en la pantalla.
Vista de código ID Visualización del código de ID actual.
Trabajo Por medio de la pantalla del atornillador se puede cancelar el trabajo activo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 41/265
Desconectar Con este ajuste se puede apagar o reiniciar el atornillador, o bien rei-niciar la WLAN.
Visor de imágenes Visor de imágenes. Las imágenes para esta vista deben estar guarda-das en la tarjeta MicroSD NX-SD, en el directorio pictures. Soporta los formatos de imagen *.jpg y *.png. En el menú Ayuda se pueden cargar las imágenes que se corresponden con la visualización en la pantalla del atornillador (véase la página 246).
Copia de seguri-dad/restaurar 1)
Creación de una copia de seguridad o importación de datos de una copia de seguridad de la tarjeta MicroSD NX-SD insertada en el atornillador.
Holgura 1 Selección de una holgura.
Diagnóstico Visualización de los datos de diagnóstico de los servicios de control y de datos de red activos.
Conectar/desco-nectar WLAN
Con este ajuste se puede activar, desactivar o reiniciar la WLAN.
1. A partir de la versión 1200 del firmware Nexo la opción Copia de seguridad/restaurar está activada de forma estándar en el menú principal en el estado de entrega del atornillador de batería con control remoto Nexo. Esta activación se considera una ventana para la primera puesta en marcha. Tras la puesta en marcha del atornillador de batería con control remoto Nexo se debe desactivar otra vez esta opción para evitar una activación involuntaria, por ejemplo, iniciar la realización de una copia de seguridad.
Tabla 3–2: Entradas para el menú principal
Elemento Descripción Vista
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

42/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.1.4 Tecnología de batería Nexo
3.1.4.1 Datos interesantes sobre las baterías de iones de litio
Tensión de celda La tensión de cada una de las celdas de la batería se denomina tensión de celda. Cuanto más elevada sea la tensión de celda, menos celdas individuales se necesitan para una batería con alta tensión. Las celdas de iones de litio posee una tensión de celda alta. En comparación con las baterías NiCd, las ba-terías de iones de litio requieren menos celdas.
Densidad de energía La densidad de energía es la medida para la cantidad de energía que puede almacenar una celda por cada unidad de peso. Las celdas con una mayor densidad de energía pesan por lo tanto menos con la misma capacidad de almacenamiento. La celda de iones de litio es bastante superior en lo relativo a la densidad de energía que las celdas a base de níquel.
Efecto memoria El concepto "efecto memoria" describe la pérdida de capacidad que puede presentarse en las baterías de NiCd. Si se producen con frecuencia descargas parciales, habrá porciones de la sustancia del elec-trodo que quedarán desgastadas o viciadas, por lo que se forma ahí una formación cristalina que dificulta muchísimo las futuras descargas de la sustancia del electrodo afectada y que, en casos extremos, las bloquea. En las baterías de iones de litio no se produce este efecto. Las baterías de iones de litio pueden cargarse independientemente del estado de carga sin dañar las celdas.
Propiedades del litio Gracias a las propiedades del litio, el material sólido más ligero en la tabla periódica, es posible construir acumuladores de energía más ligeros. El litio posee también una reactividad muy elevada con otras sus-tancias. El incendio de una celda de iones de litio es un incendio de metal. El litio presenta una reacción fuertemente exotérmica ante el agua; los incendios deben apagarse con medios de extinción de incen-dios de metal como, por ejemplo, arena o sal.
Las baterías de iones de litio están clasificadas básicamente como mercancías peligrosas. Durante su transporte también deben respetarse las disposiciones de transporte para mercancías peligrosas.
3.1.4.2 Pack de baterías de inserción NX-BP36V
Figura 3–4: Pack de baterías de inserción NX-BP36V
Sistema de gestión de baterías
Este módulo electrónico contiene funciones de protección y funciones de diagnóstico como, por ejem-plo, indicador del estado de carga y la compensación. Los packs de baterías Nexo contienen un sistema de gestión de baterías con un control de celdas individuales, una compensación de las celdas, una pro-tección contra cortocircuito y una comunicación inteligente. El sistema de gestión de baterías controla la temperatura de la batería, así como la capacidad. En caso de estados de carga irregulares de las celdas individuales, la compensación de celdas proporciona un equilibrado. En particular, esta función se activa si una celda supera la tensión máxima o no alcanza la tensión mínima.
1 Sistema de gestión de baterías
2 Células de iones de litio
1
2
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 43/265
Conexión en serie de 10 celdas de iones de litio
Figura 3–5: Conexión en serie de 10 celdas de iones de litio
• Tensión de celda de 3,6 voltios por el número de celdas 10 = 36 voltios de tensión de batería
• Capacidad de batería = Capacidad de celda = 2 amperios/hora
• De aquí se desprende el contenido energético de la batería de 36 voltios por 2 amperios/hora = 72 vatios/hora
La norma «la cadena es tan fuerte como su eslabón más débil» también se aplica a la conexión en serie de celdas de batería. Las celdas individuales de batería son similares a una cadena ya que están conec-tadas una detrás de otra. Por esta razón Rexroth utiliza celdas seleccionadas, es decir, celdas elegidas con absolutamente la misma capacidad para que el usuario también reciba la energía prometida.
Cambio del pack de baterías de inserción
La alimentación eléctrica del control integrado se mantiene aproximadamente unos 20 segundos al cam-biar la batería. En caso de un tráfico elevado de datos a través de la WLAN se reduce ese mantenimiento de la alimentación eléctrica a aprox. 10 segundos.
3.1.4.3 Cargador individual NX-BC36V
Las baterías de iones de litio se cargan normalmente con el proceso CC/CV; es decir, una corriente cons-tante carga la batería hasta que el cargador próximo a la tensión de final de carga en el funcionamiento pasa a la tensión constante. Ambos parámetros (corriente de carga y tensión de final de carga) tienen una influencia considerable sobre la vida útil de la batería. Asimismo la temperatura de la batería es un parámetro importante para la carga. A temperaturas altas, es bastante más probable que las baterías se descarguen en lugar de cargarse.
Una vez que la batería está insertada en el cargador se inicia la comunicación. La batería y el cargador intercambian respectivamente parámetros importantes. De este modo se garantiza que solo se carguen las baterías correctas de la serie Nexo y que la batería trate de la forma correspondiente sus parámetros.
El cargador carga la batería con una corriente constante. Al alcanzar la tensión de final de carga, el car-gador conmuta a una tensión constante. Por ello, una batería que permanezca insertada durante más tiempo en el cargador no se sobrecarga. No obstante, las baterías cargadas deberán desconectarse del cargador, dado que una conexión eléctrica también representa siempre un consumo de energía, incluso estando apagada.
La tecnología de carga Nexo está diseñada de modo que se enfría la batería durante la carga. Un venti-lador integrado en el cargador conduce el aire a través de la base de la batería sobre las interfaces de contacto en dirección al cargador y desde allí lo expulsa a través de los escapes que se encuentran en la base.
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah
3.6 V
2 Ah36 V2 Ah
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

44/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.1.5 Datos técnicos del atornillador
Atornillador acodado
*) Valor sin cabezal acodado
Tabla 3–3: Datos técnicos del atornillador acodado
Denominación NXA030S-36VNXA030S-36V-B
NXA011S-36VNXA011S-36V-B
N.° de pedido 0 608 842 002
0 608 842 007
0 608 842 011
0 608 842 012
Área de trabajo [Nm] 9,0 - 30 3,0 - 11
Revoluciones máx. de salida [min-1]
310 850
Revoluciones mín. de salida [min-1]
16 43
Resolución angular [°] 0,233 0,644
Peso sin/con batería [kg] 1,99 / 2,7 1,56 / 2,27
Longitud sin/con batería [mm] 534 / 590 442 / 498
Portaherramientas Cuadrado exterior de 3/8" Cuadrado exterior de 3/8"
Reducción del cabezal acodado 5,21 1,40
Rendimiento típico del cabezal acodado
0,94 0,95
Denominación NXA015S-36VNXA015S-36V-B
NXA050S-36VNXA050S-36V-B
N.° de pedido 0 608 842 001
0 608 842 006
0 608 842 003
0 608 842 008
Área de trabajo [Nm] 3,0 - 15 15 - 50
Revoluciones máx. de salida [min-1]
600 185
Revoluciones mín. de salida [min-1]
32 10
Resolución angular [°] 0,475 0,142
Peso sin/con batería [kg] 1,56 / 2,27 2,03 / 2,74
Longitud sin/con batería [mm] 442 / 498 534 / 590
Portaherramientas Cuadrado exterior de 3/8" Cuadrado exterior de 3/8"
Reducción del cabezal acodado 1,40 6,32
Rendimiento típico del cabezal acodado
0,95 0,94
Denominación NXA065S-36VNXA065S-36V-B
NXV012T-36VNXV012T-36V-B
N.° de pedido 0 608 842 013
0 608 842 014
0 608 842 015
0 608 842 016
Área de trabajo [Nm] 20 - 65 3,0 -15 / 1,8 -12*
Revoluciones máx. de salida [min-1]
135 600 / 880*
Revoluciones mín. de salida [min-1]
7 32 / 45*
Resolución angular [°] 0,104 0,665
Peso sin/con batería [kg] 2,03 / 2,74 1,56 / 2,27
1,35* / 2,06*
Longitud sin/con batería [mm] 534 / 590 442 / 498
Portaherramientas Cuadrado exterior de 3/8" Cuadrado exterior de 3/8"
Reducción del cabezal acodado 6,32 1,40
Rendimiento típico del cabezal acodado
0,94 0,95
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 45/265
Atornillador de pistola
3.1.6 Datos técnicos de WLAN
3.1.7 Datos técnicos del escáner de códigos de barras
El escáner de códigos de barras se encuentra en la unidad de control del atornillador de batería con con-trol remoto Nexo. Los atornilladores de batería con control remoto Nexo con escáner de códigos de barras integrado se identifican mediante el código "-B"; por ejemplo: NXA030S-36V-B. Los atornilladores de batería con control remoto Nexo provistos de un escáner de códigos de barras pueden leer un código de barras con una longitud máxima de 256 caracteres.
Tabla 3–4: Datos técnicos del atornillador de pistola
Denominación NXP012QD-36V NXP012QD-36V-BN.° de pedido 0 608 842 005 0 608 842 010
Área de trabajo [Nm] 1,8 - 12
Revoluciones máx. de salida [min-1]
880
Revoluciones mín. de salida [min-1]
45
Resolución angular [°] 0,665
Peso sin/con batería [kg] 1,34 / 2,05
Longitud sin/con batería [mm] 237 / 295
Portaherramientas Portabrocas de cambio rápido de 1/4"
Tabla 3–5: Datos técnicos de WLAN
Función Atornillador de batería con control remoto Nexo (todos los mode-los)
Estándar IEEE 802.11 a, b, g, n
Seguridad – WPA/ WPA2
– Modo de claves precompartidas (PSK)
– Empresa
– PEAP
– EAP-TLS
– EAP-TTLS
Alcance típico 50 m, en función del punto de acceso
Canales – 1-13 (2,412 - 2,472 GHz)
– 36-165 (5,180 - 5,825 GHz)
Potencia de emisión típica – 18.3 dBm, 11 Mbps, CCK (IEEE 802.11 b)
– 14.4 dBm, 54 Mbps, OFDM (IEEE 802.11 g)
– 12.5 dBm, 65 Mbps, OFDM (IEEE 802.11 n)
Sensibilidad típica – -88 dBm, 8% PER,11 Mbps
– -74 dBm, 10% PER, 54 Mbps
– -72 dBm, 10% PER, 65 Mbps
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

46/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.2 WLAN (Wireless Local Area Network)
WLAN se refiere a una red remota local. De este modo la comunicación de una LAN (Local Area Network) basada en Ethernet pasa a ser sin cable. Los estándares WLAN típicos están dispuestos en la norma IEEE 802.11.
El atornillador de batería Nexo está diseñado para el funcionamiento en puntos de acceso en el modo infraestructura. Esto quiere decir que el punto de acceso administra la comunicación con varios clientes en caso nece-sario (atornillador de batería con control remoto Nexo). No se prevén conexiones ad hoc.
Para diseñar el funcionamiento de manera óptima, en un punto de acceso deberían estar conectados el menor número de clientes posible (atornillador de batería con control remoto Nexo) dado que los clientes comparten el ancho de banda disponible para la velocidad de transmisión de datos. Lo mismo se aplica para el posible alcance. Si el número de atornilladores de batería con control remoto Nexo aumenta y también lo hace la distancia al punto de acceso, la velocidad de transmisión de datos disminuye. El al-cance depende del entorno: Muros, pilares de hormigón, bastidores de máquinas etc. modifican el campo electromagnético y pueden provocar limitaciones del alcance. Lo ideal es una conexión visible entre el punto de acceso y el atornillado de batería con control remoto Nexo.
Para la comunicación en la red es necesario que el atornillador de batería con control remoto Nexo dis-ponga de una dirección IP clara. No se aconseja la asignación de dirección mediante DHCP, ya que esto pude provocar que el alcance remoto se limite.
3.2.1 Punto de acceso
Debido a la estandarización según la IEEE 802.11, se pueden utilizar puntos de acceso de tipo comercial. En entornos industriales, los puntos de acceso se deben utilizar para uso industrial puesto que ofrecen la radiotécnica exigida, posibilidades de parametrización, alcance e iluminación.
Utilizando el software correspondiente (p. ej.: Connectify) también es posible utilizar como puntos de ac-ceso los aparatos aptos para WLAN como, por ejemplo, PC industriales o portátiles que pueden funcio-nar como zona con cobertura inalámbrica. Desde la llegada de Windows 7, es posible iniciar una zona con cobertura inalámbrica mediante la instrucción de entrada con el comando netshell (netsh). Este debe activarse en primer lugar, a continuación se puede introducir los parámetros y proteger la conexión WLAN con una contraseña. (Es necesario contar con derechos de administrador para activar la función.) La ventaja de estas soluciones es que reducen el consumo de hardware y configuración. El alcance y la iluminación son notablemente más bajas. Es posible que se produzcan problemas en el tiempo de ciclo por la disponibilidad de transmisión de datos.
También se puede abrir una zona con cobertura inalámbrica utilizando un teclado táctil o un teléfono mó-vil. Los iPad sin tarjeta SIM carecen de esta función. Aunque los dispositivos Android sin tarjeta SIM pue-den abrir una zona con cobertura inalámbrica, no es posible intercambiar datos con un explorador web. De todas formas, el tamaño de la pantalla es demasiado pequeño porque el sistema operativo NEXO-OS está diseñado para aplicaciones de PC.
Debido a razones de seguridad para los datos recomendamos codificar la WLAN.
Las CCX (Cisco Compatible eXtensions) no son compatibles.
• Las CCX son funciones Cisco especiales que hay en diferentes versiones (CCXv4, CCXv5,...).
• Por motivos de licencia no se pueden utilizar.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 47/265
3.2.2 Modo de infraestructura mediante el controlador de WLAN
En los entornos industriales, el modo de infraestructura se suele crear en dos procedimientos diferentes:
• Varios puntos de acceso se conectan a una red. Todos operan con el mismo SSID. Cada punto de acceso funciona de manera autárquica y su configuración también debe serlo.
• Los diversos puntos de acceso están conectados a un controlador de WLAN. Este controla del mis-mo modo todos los puntos de acceso. El controlador centraliza la administración y parametrización de la red. Esta es la construcción más frecuente en los entornos industriales.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

48/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.2.3 Diagnóstico
Hay diversas herramientas de diagnóstico de fácil uso que permiten registrar informaciones de primera mano sobre la red de WLAN.
Hay aplicaciones para Android disponibles (suelen ser gratuitas) con las que se pueden llevar a cabo aná-lisis sencillos. También existe software para ordenadores con Windows que incluye dichas funciones.
InSSIDer: aplicación que permite utilizar el teléfono inteligente como un sencillo aparato de medición de WLAN. Permite presentar gráficamente las redes existentes según el SSID en bandas de 2,4 y 5 GHz (si el teléfono inteligente los soporta). De esta manera es muy fácil comprobar si las redes están dispo-nibles de forma estable; también indica la potencia de recepción. Las condiciones de la red se muestran claramente con medios sencillos o, por ejemplo, si una zona con cobertura inalámbrica con netsh está activa.
WiFi Analyzer: funcionalidad similar a InSSIDer.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 49/265
3.3 Posibilidades de conexión del atornillador de batería con control remoto Nexo
A continuación se describen las distintas posibilidades de conexión para utilizar el atornillador de batería con control remoto Nexo:
• Memorización de resultados sin conexión remota (página 49)
• Memorización de resultados a través de WLAN (página 50)
• Activación mediante PC maestro VW-XML (página 52)
• Activación del PLC y memorización de resultados a través de la WLAN (página 53)
• Activación del bus de campo y memorización de resultados a través de la WLAN (página 54)
• Process Quality Manager (PQM) (página 55)
3.3.1 Memorización de resultados sin conexión remota
A partir de la versión 1100 del firmware Nexo se pueden guardar los datos de los resultados en la tarjeta MicroSD NX-SD insertada en el atornillador con el formato "Standard Nexo" como archivo *.json. Se puede acceder a los datos de los resultados guardados en la tarjeta MicroSD NX-SD mediante el adaptador programable NX-A. También se puede acceder a la tarjeta MicroSD NX-SD por medio de un lector de tarjetas MicroSD comercial.
Ajustes en el sistema operativo NEXO-OS:
• A partir de la versión 1200 del firmware Nexo: el directorio para guardar los resultados en la tarjeta MicroSD NX-SD se determina en Ajustes Datos Standard Nexo Tarjeta NX-SD (página 211).
• Puede acceder a la tarjeta MicroSD NX-SD en el menú Ayuda (?) Acceso tarjeta NX-SD. Los datos de los resultados se encuentra en el directorio results.
D
Figura 3–6: Memorización de resultados sin conexión remota
(1) IPC (PC industrial), portátil o servidor de la base de datos
(2) Adaptador programable NX-A
Ethernet (TCP/IP)
(2)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
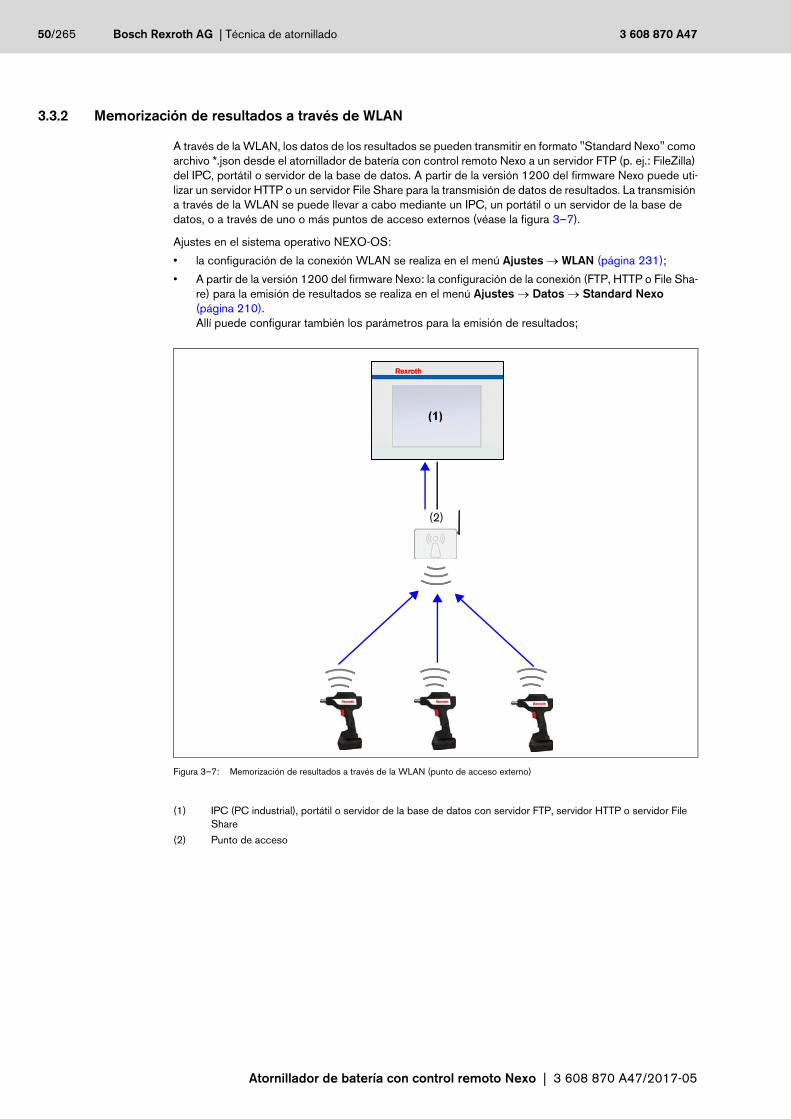
50/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.3.2 Memorización de resultados a través de WLAN
A través de la WLAN, los datos de los resultados se pueden transmitir en formato "Standard Nexo" como archivo *.json desde el atornillador de batería con control remoto Nexo a un servidor FTP (p. ej.: FileZilla) del IPC, portátil o servidor de la base de datos. A partir de la versión 1200 del firmware Nexo puede uti-lizar un servidor HTTP o un servidor File Share para la transmisión de datos de resultados. La transmisión a través de la WLAN se puede llevar a cabo mediante un IPC, un portátil o un servidor de la base de datos, o a través de uno o más puntos de acceso externos (véase la figura 3–7).
Ajustes en el sistema operativo NEXO-OS:
• la configuración de la conexión WLAN se realiza en el menú Ajustes WLAN (página 231);
• A partir de la versión 1200 del firmware Nexo: la configuración de la conexión (FTP, HTTP o File Sha-re) para la emisión de resultados se realiza en el menú Ajustes Datos Standard Nexo (página 210). Allí puede configurar también los parámetros para la emisión de resultados;
Figura 3–7: Memorización de resultados a través de la WLAN (punto de acceso externo)
(1) IPC (PC industrial), portátil o servidor de la base de datos con servidor FTP, servidor HTTP o servidor File Share
(2) Punto de acceso
(2)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 51/265
3.3.3 Activación y memorización de resultados a través de la WLAN
La comunicación (activación) del atornillador de batería con control remoto Nexo con WLAN tiene lugar a través del Rexroth Open Protocol. El IPC, el portátil o el servidor de la base de datos debe incluir un software apropiado para comunicarse con el Open Protocol.
A través de la WLAN, los datos de los resultados se pueden transmitir además en formato "Standard Ne-xo" como archivo *.json desde el atornillador de batería con control remoto Nexo a un servidor FTP del IPC, portátil o servidor de la base de datos. A partir de la versión 1200 del firmware Nexo puede utilizar un servidor HTTP o un servidor File Share para la transmisión de datos de resultados. La transmisión a través de la WLAN se puede llevar a cabo mediante un IPC, un portátil o un servidor de la base de datos, o a través de uno o más puntos de acceso externos (véase la figura 3–8).
Ajustes en el sistema operativo NEXO-OS:
• la configuración de la conexión WLAN se realiza en el menú Ajustes WLAN (página 231);
• A partir de la versión 1200 del firmware Nexo: la configuración de la conexión (FTP, HTTP o File Sha-re) para la emisión de resultados se realiza en el menú Ajustes Datos Standard Nexo (página 210). Allí puede configurar también los parámetros para la emisión de resultados;
• los ajustes para la comunicación con el Rexroth Open Protocol se llevan a cabo en el menú Ajustes Datos Open Protocol (página 218).
Figura 3–8: Activación y memorización de resultados a través de la WLAN (punto de acceso externo)
(1) IPC (PC industrial), portátil o servidor de la base de datos con software para la activación a través del Open Protocol, y servidor FTP, servidor HTTP o servidor File Share
(2) Punto de acceso
(2)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

52/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.3.3.1 Activación mediante PC maestro VW-XML
El PC maestro VW-XML controla el/los atornillador/es de batería con control remoto Nexo y recibe los resultados del/de los atornillador/es. Para ello, el IPC debe incluir un software maestro VW-XML. La transmisión a través de la WLAN a un PC maestro VW-XML se puede llevar a cabo a través de uno o más puntos de acceso externos (véase la figura 3–9).
Ajustes en el sistema operativo NEXO-OS:
• la configuración de la conexión WLAN se realiza en el menú Ajustes WLAN (página 231);
• el ajuste para la comunicación con VW-XML se lleva a cabo en el menú Ajustes Datos VW-XML (página 222);
• La tabla de asignación BMS debe realizarse conforme al modo descrito en el capítulo Protocolo VW-XML. Los ajustes para la tabla de asignación BMS se llevan a cabo en el menú Ajustes Señales BMS (página 227);
• La etiqueta <PI1> definida en el protocolo VW-XML puede utilizarse como código ID en Nexo. Ade-más, en el modo se puede establecer en el paso inicial la selección de fuente de código de ID a VW-XML (véase la página 186).
Figura 3–9: Activación mediante PC maestro VW-XML
A partir de la versión 1200 del firmware Nexo se soporta el protocolo VW-XML. Se soporta la versión VW-XML 2.1.
Un uso del protocolo VW-XML fuera de VOLKSWAGEN AKTIENGESELLSCHAFT solo está permitido con una autorización expresa por escrito de VOLKSWAGEN AKTIENGESELLSCHAFT.
(1) IPC (PC industrial) con software maestro VW-XML
(2) Punto de acceso
(2)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 53/265
3.3.4 Activación del PLC y memorización de resultados a través de la WLAN
La comunicación (activación) del atornillador de batería con control remoto Nexo con WLAN tiene lugar a través del Rexroth Open Protocol. Además, los resultados (sin curva de datos) se pueden transmitir a través del Rexroth Open Protocol. El PLC debe contener módulos de función que permitan la comunica-ción a través del Rexroth Open Protocol.
A través de la WLAN, los datos de los resultados se pueden transmitir además en formato "Standard Ne-xo" como archivo *.json desde el atornillador de batería con control remoto Nexo a un servidor FTP del IPC o servidor de la base de datos. A partir de la versión 1200 del firmware Nexo puede utilizar un servidor HTTP o un servidor File Share para la transmisión de datos de resultados. La transmisión a través de la WLAN se puede llevar a cabo a través de uno o más puntos de acceso externos (véase la figura 3–10).
Ajustes en el sistema operativo NEXO-OS:
• la configuración para el punto de acceso se realiza en el menú Ajustes WLAN (página 231);
• A partir de la versión 1200 del firmware Nexo: la configuración de la conexión (FTP, HTTP o File Sha-re) para la emisión de resultados se realiza en el menú Ajustes Datos Standard Nexo (página 210). Allí puede configurar también los parámetros para la emisión de resultados;
• los ajustes para el Rexroth Open Protocol se llevan a cabo en el menú Ajustes Datos Open Protocol (página 218).
Figura 3–10: Activación del PLC y memorización de resultados a través de la WLAN
(1) Otra unidad de control
(2) Punto de acceso
(3) IPC (PC industrial) o servidor de la base de datos
Ethernet (TCP/IP)
(1) (3)
(2)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

54/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3.3.5 Activación del bus de campo y memorización de resultados a través de la WLAN
A través de la lógica integrada en el sistema compacto CS351 con IL se puede establecer el control mo-nocanal como puerta de enlace entre el bus de campo del PLC y el atornillador de batería con control remoto Nexo. La comunicación entre CS351 IL y PLC tiene lugar en el bus de campo. La comunicación entre el atornillador de batería con control remoto Nexo y CS351 IL mediante WLAN se produce a través del Rexroth Open Protocol.
Además, en un sistema compacto CS351 con IL se pueden conectar varios atornilladores de batería con control remoto Nexo a una atornilladora manual ErgoSpin o a un husillo atornillador, limitado por el bus de campo. El bus de campo limita la cantidad máxima de posibles resultados transferibles. La lógica in-tegrada del CS351 IL debe incluir bloques de funciones que permitan la comunicación con el atornillador de batería con control remoto Nexo a través de Rexroth Open Protocol. El CS351 IL dispone de dos in-terfaces de 24 V, por ejemplo, para conectar soportes para vasos. Si fuera necesario colocar más sopor-tes de este tipo, es necesario conectarlos directamente al PLC.
A través de la WLAN, los datos de los resultados se pueden transmitir además en formato "Standard Ne-xo" como archivo *.json desde el atornillador de batería con control remoto Nexo a un servidor FTP del IPC o servidor de la base de datos. A partir de la versión 1200 del firmware Nexo puede utilizar un servidor HTTP o un servidor File Share para la transmisión de datos de resultados.
La transmisión con WLAN se puede llevar a cabo a través de uno o más puntos de acceso.
Ajustes en el sistema operativo NEXO-OS:
• la configuración para el punto de acceso se realiza en el menú Ajustes WLAN (página 231);
• A partir de la versión 1200 del firmware Nexo: la configuración de la conexión (FTP, HTTP o File Sha-re) para la emisión de resultados se realiza en el menú Ajustes Datos Standard Nexo (página 210). Allí puede configurar también los parámetros para la emisión de resultados;
• los ajustes para el Rexroth Open Protocol se llevan a cabo en el menú Ajustes Datos Open Protocol (página 218).
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 55/265
Figura 3–11: Activación del bus de campo y memorización de resultados a través de la WLAN
3.3.6 Process Quality Manager (PQM)
Process Quality Manager (PQM) es una solución de software de Bosch Rexroth. Sirve para detectar y evitar lo antes posible divergencias y errores en el proceso de producción. Con el PQM se controlan y documentan de forma segura y fiable los procesos de producción.
El PQM recopila los datos de los procesos de atornillado y los prepara para el software del atornillador en esta única vista. Además, hay disponibles diversas vistas para el análisis de los resultados del atorni-llador, para garantizar una reacción rápida a errores en el proceso de producción. Utilizando un PQM se pueden transmitir mediante una conexión HTTP los datos de la emisión de resultados desde el atornilla-dor de batería con control remoto Nexo al PQM.
Ajustes en el sistema operativo NEXO-OS:
• A partir de la versión 1200 del firmware Nexo: la configuración de la conexión HTTP para la emisión de resultados se realiza en el menú Ajustes Datos Standard Nexo (página 210). Allí puede configurar también los parámetros para la emisión de resultados.
(1) Otra unidad de control con conexión de bus de campo
(2) Sistema compacto CS351 IL
(3) Punto de acceso
(4) IPC (PC industrial) o servidor de la base de datos
Ethernet (TCP/IP)
(1)
(4)
(2)
(3)
(1)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

56/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

4 Montaje
Este capítulo describe los posibles montajes del atornillador de batería con control remoto Nexo.
• Vista general (página 58)• Actividades previas a la puesta en marcha (página 58)• Ajuste del cabezal acodado (página 59)• Colocar soporte de par de giro (página 61)• Colocación del accesorio (página 64)

58/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
4.1 Vista general
4.2 Actividades previas a la puesta en marcha
Antes de la puesta en marcha del atornillador manual es necesario realizar las siguientes actividades:
• Atornillador de batería con control remoto Nexo - Atornillador acodado NXA
– En su caso, ajuste del cabezal acodado, véase Ajuste del cabezal acodado a partir de la página 59
– En su caso, colocar soporte de par de giro, véase Colocar soporte de par de giro a partir de la página 61
– Colocar accesorio, véase Colocación del accesorio a partir de la página 64
– Introducir pack de baterías de inserción.
• Atornillador de batería con control remoto Nexo - Atornillador de pistola NXP
– Colocar accesorio, véase Colocación del accesorio a partir de la página 64
– Introducir pack de baterías de inserción.
ATENCIÓN
Posibilidad de un montaje/desmontaje incorrecto del producto.Peligro de lesiones y daños en el equipo durante el funcionamiento posterior. Montar/desmontar el producto según las siguientes indicaciones y en el orden correcto. No inmovilizar nunca el producto empleando para ello el exterior de la carcasa, p. ej., en un torni-
llo de banco.
ATENCIÓN
¡Manejo inadecuado!En condiciones desfavorables, el manejo y el montaje/desmontaje inadecuado de determinados ele-mentos y componentes pueden causar lesiones. Lesiones por aplastamiento, cizallamiento, corte y choques. Observar las normas de construcción y de seguridad generales correspondientes al estado de la
técnica para el manejo y el montaje/desmontaje. Utilizar dispositivos de montaje/desmontaje y de transporte apropiados. Prevenir el aprisionamiento y el aplastamiento con las medidas oportunas. Utilizar únicamente herramientas adecuadas. Si está prescrito su uso, utilizar herramientas especiales. Utilizar correctamente las herramientas. Si es necesario, utilizar los equipos de protección apropiados (p. ej., gafas protectoras, calzado
de seguridad, guantes de protección). No se permite la estancia debajo de cargas suspendidas.
ATENCIÓN
¡Peligro de lesiones!Una conexión accidental del producto durante el montaje/desmontaje puede causar lesiones graves. Antes de realizar trabajos en el producto, colocar el interruptor selector de programa en la posi-
ción intermedia (bloqueo de arranque) y retirar la batería.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 59/265
4.3 Ajuste del cabezal acodado
NXA011S y NXA015S Puede ajustar el cabezal acodado en un total de ocho posiciones.
Herramienta necesaria (no incluida en el volumen de suministro):
• Llave fija de 22 mm de ancho
• Llave fija de 27 mm de ancho
Figura 4–1: Desatornillar el cabezal acodado
1. Sujete el atornillador manual mediante la llave fija 3 a la superficie de llave 4 de la brida del cabezal acodado (véase la figura 4–1).
2. Desatornille mediante la llave fija 1 en la superficie de llave 2 la tuerca de unión (véase la figura 4–1).
Figura 4–2: Ajustar el cabezal acodado y sujetar la tuerca de unión
AVISO
¡Daños en el producto!Al retirar el cabezal del atornillador acodado, no se puede encender el atornillador. Encienda el atornillador cuando el montaje esté completamente terminado.
1
3
2
4
1
3
2
5
18 + 4 Nm
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

60/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
3. Ajuste el cabezal acodado 5 a 45° respectivamente de la posición deseada y vuelva a fijar la tuerca de unión mediante la llave fija 1 de la superficie de llave 2. Al mismo tiempo, oponga resistencia con la llave fija 3 en la brida de cabezal acodado (véase la figura 4–2).
NXA030S, NXA050S yNXA065S
Puede ajustar el cabezal acodado 360° de forma totalmente gradual.
Herramienta necesaria (no incluida en el volumen de suministro):
• Llave para tuercas ranuradas DIN 1810 forma B, diámetro externo de tuerca 34-36 mm, diámetro de perno 4 mm
• Ayuda para el montaje de cabezales acodados ESWM 3608876473
Figura 4–3: Desatornillar y ajustar el cabezal acodado
Para el giro, se debe desencajar el cabezal acodado (tirar hacia adelante de forma correspondiente). Des-pués de realizar el ajuste, preste atención a que el cabezal acodado esté correctamente encajado antes de volver a apretar la tuerca de unión.
AVISO
¡Daños por manejo inadecuado!Daños del atornillador manual. Coloque la ayuda para el montaje únicamente en la zona de apriete autorizada para el soporte de
par de giro (véase Colocar soporte de par de giro en la página 61).
4
B
2
1 3
A
C5
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 61/265
1. Fije la ayuda de montaje en el tornillo de banco o similares.
2. Monte el cabezal acodado en la ayuda de montaje (véase la hoja adjunta a la ayuda de montaje).
3. Desatornille la contratuerca 3 mientras engancha la contratuerca en un orificio con la llave para tuer-cas ranuradas y gírela en el sentido de la flecha A (rosca izquierda), (véase la figura 4–3).
4. Gire el atornillador 5 en el sentido de la flecha B hasta que alcance el ángulo de trabajo deseado, pero no lo puede girar más de 360° (véase la figura 4–3).
Figura 4–4: Apretar la contratuerca
5. Fije el cabezal del atornillador acodado 1 mientras gira la contratuerca 3 en el sentido de la flecha C, (véase la figura 4–4).
6. Vuelva a apretar la contratuerca 3 (véase la figura 4–4).
4.4 Colocar soporte de par de giro
Coloque un soporte de par de giro en el atornillador manual para poder llevar a cabo atornillados con pares de giro más elevados.
40 + 15 Nm1
3
C
ATENCIÓN
Falta soporte de par de giro en el atornillador manual cuando aparecen pares de giro ele-vados.Al ejecutar atornillados con pares de giro elevados mediante un atornillador manual, las fuerzas apli-cadas pueden causar lesiones, sobre todo en las articulaciones. Recomendación: Con un atornillador acodado, monte y utilice un soporte de par de giro a partir
de un par de giro de 40 Nm. Recomendación: Con un atornillador de pistola, monte y utilice un soporte de par de giro a partir
de un par de giro de 10 Nm. Además, tenga en cuenta las disposiciones específicas del país y/o comerciales.
AVISO
¡Daños por montaje inadecuado!Daños del atornillador manual. Coloque el soporte del par de giro únicamente en la zona de apriete (A) prevista para ello.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

62/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
NXA011S, NXA015S,NXA030S, NXA050S y
NXA065S
Figura 4–5: Zona de apriete para soporte de par de giro - NXA011S/NXA015S
Figura 4–6: Zona de apriete para soporte de par de giro - NXA030S/NXA050S/NXA065S
Par y anchura de apriete mínima para soporte de par de giro en atornillador acodado:
• El apriete se debe realizar en plano en el diámetro del cabezal del atornillador acodado dentro de la zona marcada.
• Anchura de apriete mínima: 12 mm
• Par de apriete para tornillos de sujeción del tamaño M6: 8 +1 Nm
NXP
Figura 4–7: Zona de apriete para soporte de par de giro
A
20 mm
38 mm45 mm
Ø 35 mm
A
15 ... 19 mm
A
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 63/265
Par para soporte de par de giro en atornillador de pistola:
Figura 4–8: Posición de montaje de pieza de sujeción
M = 7 + 1 Nm
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

64/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Ejemplo: Anchura de apriete mínima para soporte de par de giro en atornillador de pistola:
Figura 4–9: Dimensiones mínimas de pieza de sujeción
4.5 Colocación del accesorio
> 74
55 ± 0,2Ø 9
M8
2
Ø43
H9
> 6
0>
15
< 1
9
ATENCIÓN
¡Peligro de lesiones!Una conexión accidental del producto durante el montaje/desmontaje puede causar lesiones graves. Antes de realizar trabajos en el producto, colocar el interruptor selector de programa en la posi-
ción intermedia (bloqueo de arranque) y retirar la batería.
Durante el montaje/desmontaje del accesorio, tenga en cuenta los datos de las instrucciones correspon-dientes.
En caso de que deba montar cabezales de salida planos, en la zona de apriete se debe cumplir con lo detallado en la colocación del soporte de par de giro.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
5 Directivas de construcción
Este capítulo aporta información básica para el atornillado siempre y cuando sean relevantes para el atornillador de batería de alta frecuencia de Rexroth. Encontrará más información en Internet: www.boschrexroth.com/schraubtechnik.
• Dimensionamiento de una unión atornillada (página 66)• Tiempos de ciclo (página 70)• Compatibilidad con sustancias externas (página 71)• Asistente de planificación (página 71)

66/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
5.1 Dimensionamiento de una unión atornillada
La planificación comienza con la definición de las atornilladuras que hay que realizar.
5.1.1 Fuerza de apriete y deformación de las piezas conectadas, fuerza de operación
Figura 5–1: Diagrama de deformación por tensiones con fuerza de operación invasiva
Al apretar el tornillo este se dilata debido al efecto de una fuerza de tensión previa FM del resorte de trac-ción. La fuerza de apriete afecta a todas las piezas que hay que atornillar (resorte de compresión) y las comprime entre sí. Normalmente el tornillo se dilata más con el apriete cuando se comprimen las piezas entre sí.
Durante el montaje, la fuerza de tensión previa aplicada FM dilata el tornillo según la medida fSM. Las pie-zas que se deben atornillar se comprimen entre sí debido a las fuerzas de apriete fPM aplicadas (aplasta-das).
Si en la unión atornillada influyen fuerzas de operación, la fuerza de operación FSA se superpone a la fuer-za de tensión previa FM. Además, el tornillo se dilata en fSA, la fuerza de compresión sobre el material fPM se reduce según la medida fPA La piezas tensadas se descargan según la medida de fuerza axial FPA, la fuerza de apriete residual FKR, que actúa sobre las piezas, se mantiene.
También encontrará información básica sobre uniones atornilladas y técnica de atornillado en "Técnica de atornillado", ISBN 3-478-93073-1, Editorial Moderne Industrie
F Fuerza
f Deformación
FM Fuerza de tensión previa de montaje
fSM Dilatación elástica del tornillo mediante FM
fPM Aplastamiento elástico de piezas de ensamblaje
fSA Aumento de la dilatación elástica del tornillo
fPA Disminución del aplastamiento elástico de piezas de ensamblaje
FS Fuerza total (fuerza de tensión previa y fuerza de operación)
FA Fuerza axila de tornillo
FKR Fuerza de apriete residual
FPA Fuerza axial, descarga de las piezas tensadas
FSA Fuerza de operación
F
FM FSA
FPA
FKR
FS
fPMfSM
fSA = fPA
FA
f
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 67/265
5.1.2 Determinación del par de giro necesario para el fabricante del la unión atornillada.
Por norma general, en el caso de los fabricantes de uniones atornilladas, la fuerza de tensión previa ne-cesaria para establecer un ensamblaje seguro de las piezas ya está fijada. Dado que la medición de la fuerza de tensión previa es muy laboriosa, para la fuerza de tensión previa se utiliza el par de apriete o el ángulo de giro como cantidad auxiliar. Al cerrar los pares de apriete medidos a la fuerza de tensión previa, hay que tener en cuenta los factores que se describen a continuación.
5.1.2.1 Fricción al apretar la atornilladura.
Una influencia grande provoca la fricción al apretar la unión atornillada. La fricción depende básicamente de las siguientes condiciones:
• Calidad de mecanizado de las piezas que hay que atornillar
• Tolerancias de aspereza de tornillo y tuerca
• Emparejamiento de material, tanto de las piezas que hay que atornillar como del tornillo
• Recubrimiento de superficies de los tornillos y componentes
• Forma de la rosca y paso de rosca
La fricción se forma por el roce de la rosca y el roce de la cabeza inferior. No es la fricción en sí lo que dificulta el cálculo de la fuerza de tensión previa de los pares de apriete sino el esparcimiento del coefi-ciente de fricción de unión atornillada con unión atornillada.
5.1.2.2 Asentamientos
Los asentamientos aparecen si al apretar las atornilladuras las piezas y/o tornillos unidos se deforman plásticamente y la fuerza de tensión previa disminuye de manera permanente.
Figura 5–2: Relación entre la fuerza de apriete y la deformación del tornillo y las piezas conectadas.
Condiciones antes del proceso de asentamiento (en el momento del atornillado)
Condiciones después del proceso de asentamiento
f Deformación
F Fuerza
fPM Aplastamiento de las piezas conectadas
fSM Alargamiento del tornillo
fZ Cuantía de asentamiento
FM Fuerza de tensión previa antes del proceso de asentamiento
FV Fuerza de tensión previa
FZ Pérdida de fuerza de tensión previa debido a proceso de asentamiento
FV
FM
F
f
FZ
f SM f PM
f Z
F
FM
FV
FZ
fZ
ffPMfSM
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

68/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Los asentamientos pueden evitarse o reducirse mediante los siguientes procesos:
• adaptación constructiva, por ejemplo, de las superficies de apoyo para evitar las fuerzas que sobre-pasen el límite de flujo de los materiales (presión de superficie autorizada);
• Selección de materiales adecuados (suficientemente sólidos).
• La adecuada elaboración de las superficies de las piezas que hay que unir evita los asentamientos en el área de la rugosidad de superficies.
• proceso de apriete, en el cual el proceso de asentamiento (por ejemplo: en el área de la rugosidad de superficie) finaliza durante el atornillado; el resultado del atornillado (par de apriete) se determina solo al finalizar el proceso de asentamiento.
5.1.2.3 Influencias térmicas
Debido a las oscilaciones de temperatura, además de las piezas que hay que unir, también se dilata o se aplasta el tornillo. La utilización de materiales con el mismo coeficiente de dilatación evita que la fuerza de tensión previa varíe con la temperatura.
5.1.2.4 Bloqueos de uniones atornilladas
Los bloqueos mecánicos y químicos deben tenerse en cuenta especialmente en relación con sus carac-terísticas de asentamiento. En el caso de tuercas de bloqueo elásticas la fricción aumenta al apretar de-bido al inserto de plástico de la tuerca.
5.1.2.5 Factor de apriete aA (consideración de la seguridad de apriete)
La fuerza de presión previa de una unión atornillada está influenciada por una gran cantidad de factores:
• El ancho de dispersión de la fricción real que se origina bajo la cabeza del tornillo y en la rosca; para el cálculo puede utilizarse un valor dado típico.
• diferencias en función del proceso de atornillado, por ejemplo, apriete rápido o lento del tornillo, pro-ceso controlado por par de apriete/ángulo de giro, atornillado de límite de fluencia;
• Exactitud del sistema de atornillado utilizado
Para el dimensionamiento de la unión atornillada y teniendo en cuenta los factores de influencia mencio-nados, hay que asegurarse de que, en caso de fallo (fuerza de tensión previa mínima alcanzada FVmin), la función de la unión atornillada se mantenga intacta y que, en el caso de alcanzar la fuerza de tensión pre-via máxima FVmax, el tornillo no se rompa.
El factor de apriete describe el efecto de los factores de influencia sobre la fuerza de tensión previa de la atornilladura. Cuanto mayor sea el factor de apriete mayor tendrá que ser el dimensionamiento de la unión atornillada (diámetro de tornillos).
La definición del factor de apriete aA es:
Encontrará datos más detallados sobre los valores típicos del factor de apriete en la directiva VDI 2230.
5.1.2.6 Tabla de fuerza de apriete según VDI 2230
La siguiente tabla indica los valores orientativos para las fuerzas de tensión previa de montaje (FM) y pares de apriete (MA) para los tornillos de vástago con rosca métrica normal según DIN ISO 262 y las dimen-siones de la cabeza de los tornillos hexagonales según DIN EN ISO 4014 a 4018 o los tornillos cilíndri-cos según DIN EN ISO 4762 y "medios" de taladro según DIN EN 20273 , dependiendo de su factor de fricción (G).
aA
FVmax
FVmín.-------------- fuerza de tensión previa máxima
fuerza de tensión previa mín. necesaria--------------------------------------------------------------------------------------------------= =
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 69/265
Tabla 5–1: Tabla de fuerza de apriete
Medi-ción
Clase de resistencia
Fuerza de tensión previa de montaje FM en kN para G Par de apriete PA en Nm para G
0,08 0,10 0,12 0,14 0,16 0,20 0,24 0,08 0,10 0,12 0,14 0,16 0,20 0,24M4 8.8 4,6 4,5 4,4 4,3 4,2 3,9 3,7 2,3 2,6 3,0 3,3 3,6 4,1 4,5
10.9 6,8 6,7 6,5 6.3 6.1 5.7 5.4 3.3 3.9 4.8 4.6 5,3 6,0 6,6
12.9 8,0 7,8 7,6 7,4 7,1 6,7 6,3 3,9 4,5 5,1 5,6 6,2 7,0 7,8
M5 8.8 7,6 7,4 7,2 7,0 6,8 6,4 6,0 4,4 5,2 5,9 6,5 7,1 8,1 9,0
10.9 11,1 10,8 10,6 10,3 10,0 9,4 8,8 6,5 7,6 8,6 9,5 10,4 11,9 13,2
12.9 13,0 12,7 12,4 12,0 11,7 11,0 10,3 7,6 8,9 10,0 11,2 12,2 14,0 15,5
M6 8.8 10,7 10,4 10,2 9,9 9,6 9,0 8,4 7,7 9,0 10,1 11,3 12,3 14,1 15,6
10.9 15,7 15,3 14,9 14,5 14,1 13,2 12,4 11,3 13,2 14,9 16,5 18,0 20,7 22,9
12.9 18,4 17,9 17,5 17,0 16,5 15,5 14,5 13,2 15,4 17,4 19,3 21,1 24,2 26,8
M7 8.8 15,5 15,1 14,8 14,4 14,0 13,1 12,3 12,6 14,8 16,8 18,7 20,5 23,6 26,2
10.9 22,7 22,5 21,7 21,1 20,5 19,3 18,1 18,5 21,7 24,7 27,5 30,1 34,7 38,5
12.9 26,6 26,0 25,4 24,7 24,0 22,6 21,1 21,6 25,4 28,9 32,2 35,2 40,6 45,1
M8 8.8 19,5 19,1 19,0 18,8 17,6 16,5 15,5 18,5 21,6 24,6 27,3 29,8 34,3 38,0
10.9 28,7 28,0 27,3 26,6 25,8 24,3 22,7 27,2 31,8 36,1 40,1 43,8 50,3 55,8
12.9 33,6 32,8 32,0 31,1 30,2 28,4 26,6 31,8 37,2 42,2 46,9 51,2 58,9 65,3
M10 8.8 31,0 30,3 29,6 28,8 27,9 26,3 24,7 36 43 48 54 59 68 75
10.9 45,6 44,5 43,4 42,2 41,0 38,6 36,2 53 63 71 79 87 100 110
12.9 53,3 52,1 50,8 49,4 48,0 45,2 42,4 62 73 83 93 101 116 129
M12 8.8 45,2 44,1 43,0 41,9 40,7 38,3 35,9 63 73 84 93 102 117 130
10.9 66,3 64,8 63,2 61,5 59,8 56,3 52,8 92 108 123 137 149 172 191
12.9 77,6 75,9 74,0 72,0 70,0 65,8 61,8 108 126 144 160 175 201 223
M14 8.8 62,0 60,6 59,1 57,5 55,9 52,6 49,3 100 117 133 148 162 187 207
10.9 91,0 88,9 86,7 84,4 82,1 77,2 72,5 146 172 195 218 238 274 304
12.9 106,5 104,1 101,5 98,8 96,0 90,4 84,8 171 201 229 255 279 321 356
M16 8.8 84,7 82,9 80,9 78,8 76,6 72,2 67,8 153 180 206 230 252 291 325
10.9 124,4 121,7 118,8 115,7 112,6 106,1 99,6 224 264 302 338 370 428 477
12.9 145,5 142,4 139,0 135,4 131,7 124,1 116,6 262 309 354 395 433 501 558
M18 8.8 107 104 102 99 96 91 85 220 259 295 329 360 415 462
10.9 152 149 145 141 137 129 121 314 369 421 469 513 592 657
12.9 178 174 170 165 160 151 142 367 432 492 549 601 692 769
M20 8.8 136 134 130 127 123 116 109 308 363 415 464 509 588 655
10.9 194 190 186 181 176 166 156 438 517 592 661 725 838 933
12.9 227 223 217 212 206 194 182 513 605 692 773 848 980 1092
M22 8.8 170 166 162 158 154 145 137 417 495 567 634 697 808 901
10.9 242 237 231 225 219 207 194 595 704 807 904 993 1151 1284
12.9 283 277 271 264 257 242 228 698 824 945 1057 1162 1347 1502
M24 8.8 196 192 188 183 178 168 157 529 625 714 798 875 1011 1126
10.9 280 274 267 260 253 239 224 754 890 1017 1136 1246 1440 1604
12.9 327 320 313 305 296 279 262 882 1041 1190 1329 1458 1685 1877
M27 8.8 257 252 246 240 234 220 207 772 915 1050 1176 1292 1498 1672
10.9 367 359 351 342 333 314 295 1100 1304 1496 1674 1840 2134 2381
12.9 429 420 410 400 389 367 345 1287 1526 1750 1959 2153 2497 2787
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

70/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
5.1.3 Caso de atornillado (suave – fuerte)
Caso de atornilladosuave
Se trata de un caso de atornillado suave si hasta alcanzar el par de apriete es necesario un ángulo de giro relativamente grande1. Este será el caso siempre que se atornillen materiales elásticos (o blandos), p. ej., anillos elásticos, elastómeros o juntas. Al establecer estas uniones atornilladas el sistema de torni-llos debe satisfacer desgastes mecánicos de larga duración.
Caso de atornilladoduro
Se trata de un caso de atornillado fuerte cuando se alcanza el par de apriete final dentro de un ángulo de giro pequeño 1). Los requisitos de un sistema de atornillado consisten en finalizar rápidamente el atorni-llado al alcanzar el par de apriete y evitar la marcha en inercia del husillo (inercia de la masa). Solo enton-ces puede considerarse el proceso de atornillado como seguro.
Determinación delcaso de atornillado
según ISO 5393
La definición del caso de atornillado fuerte o suave está determinada en ISO 5393:
• caso de atornillado fuerte: incremento del par de apriete del 10 % al 100 % del par de apriete meta en un ángulo de giro de 27° (o del 0 % al 100 % en 30°);
• caso de atornillado suave: incremento del par de apriete del 10 % al 100 % del par de apriete meta en un ángulo de giro de 650° (o del 0 % al 100 % en 720°).
Determinación decaso de atornillado
según VDI/VDE 2647
La definición se ha determinado en VDI/VDE 2647 del siguiente modo:
• caso de atornillado fuerte: incremento del par de apriete del 50 % al 100 % del par de apriete meta en un ángulo de giro de 30°;
• caso de atornillado suave: incremento del par de apriete del 50 % al 100 % del par de apriete meta en un ángulo de giro de 360°.
El caso de atornillado es especialmente relevante para la selección del número de revoluciones en último paso de atornillado y con esto también es importante para el tiempo del ciclo (página 70).
5.1.4 Proceso de atornillado
Debería diseñarse una unión atornillada de manera que la fuerza de tensión previa mínima alcanzable ga-rantice la funcionalidad mínima de la unión atornillada, pero que la fuerza de tensión previa máxima no destruya la unión atornillada o el tornillo.
Para esto están disponibles los siguientes procesos de atornillado:
• Proceso de atornillado con ángulo de giro controlado
• Proceso de atornillado con par de apriete controlado
• proceso de atornillado especial, por ejemplo, Procesos de desatornillado/atornillado
Encontrará información detallada al respecto en el capítulo Proceso de apriete a partir de la página 247.,
5.2 Tiempos de ciclo
El tiempo de ciclo posible está determinado por dos factores (tiempo mínimo efectivo para un proceso de atornillado):
• La duración de paso de atornillado
• emisión de calor del atornillador.
1. El ángulo de giro considerado aquí es la diferencia de ángulo entre el alcance de un par de giro um-bral (10 % de par de apriete nominal) y el alcance del par de apriete (final del proceso de atornillado).
Si se realiza el cambio de pack de batería insertable dentro del margen de tiempo no se produce ninguna pérdida de tiempo de ciclo (véase la página 43).
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 71/265
5.2.1 Duración total de paso de atornillado
La duración total de paso de atornillado se puede determinar mediante el ángulo máximo de giro espera-do y el número de revoluciones seleccionado en cada paso de atornillado. Debido a la gran aceleración al arrancar o frenar el husillo se puede prescindir de tener en cuenta estos tiempos.
La duración total de todos los pasos de atornillador o el tiempo de ciclo mínimo se obtiene sumando los elementos:
tciclo = tconectado + tantes + tfinal (en caso de un proceso de atornillado en tres etapas).
5.3 Compatibilidad con sustancias externas
Todos los componentes del sistema de atornillado de Rexroth están desarrollados y probados según el estado actual de la técnica.
Dado que es imposible el seguimiento del desarrollo continuado de todas las sustancias con las que pue-den entrar en contacto nuestros componentes del sistema de atornillado (p. ej., lubricante en máquinas herramienta), no se pueden excluir siempre las reacciones con los materiales de trabajo que utilizamos.
Por esto deberá realizar una prueba de compatibilidad entre los lubricantes, detergentes nuevos, etc., y nuestras carcasas/materiales antes de la utilización.
5.4 Asistente de planificación
5.4.1 Datos 3D/CAD
Todos los datos CAD de Bosch Rexroth están disponibles en la siguiente dirección de Internet:
www.boschrexroth.com/schraubtechnik
En la página web indicada visite los enlaces de los componentes correspondientes. Mediante la pestaña CAD se ponen a disposición los datos CAD.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

72/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

6 Señales de mando
En este capítulo encontrará información detallada sobre la señal de mando el control de los medios de producción (BMS) atornillador de batería con control remoto Nexo de Rexroth.
• Señales BMS (página 74)• Descripción de todas las señales BMS (página 74)

74/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
6.1 Señales BMS
De manera estándar el atornillador de batería con control remoto Nexo de Rexroth se suministra con una tabla de asignación BMS preconfigurada.
La tabla de asignación BMS determina la asignación de las señales de mando a las interfaces físicas del atornillador de batería con control remoto Nexo. Con ayuda de las señales de mando la unidad de control de atornillado se puede integrar en el desarrollo de la instalación. En las interfaces existe disponible el siguiente número de salidas y entradas:
.
Mediante el sistema operativo NEXO-OS se puede adaptar la configuración de la tabla de asignación BMS para las exigencias propias, véase el menú Ajustes Señales BMS (véase la página 227).
6.2 Descripción de todas las señales BMS
A continuación encontrará una descripción de todas las señales BMS en orden alfabético.
6.2.1 Señales de entrada
Vista general de las señales de entrada BMS
Tabla 6–1: Número de entradas y salidas
Módulo BMS Entradas Salidastool: atornillador 16 0
oprtcl: Rexroth Open Protocol 48 16
vwXml: VW-XML 40 56
Señal Función DescripciónActEn Active Enable Autorización de un proceso de atornillado inde-
pendiente
ActScan 1) Active Scanner Autorización de un proceso de escaneado indi-vidual
AppIn0-15 Aplicación In Bit 0-15 Señal de entrada específica de aplicación
Ccw Counter clock wise Desatornillado
CcwIgnore Counter clock wise ignore Ignorar interruptor izquierda
CwIgnore Clock wise ignore Ignorar interruptor derecha
CcwLock Counter clock wise lock Bloquear desatornillado
Cw Clock wise Comenzar atornillado en el sentido de las agu-jas del reloj
CwLock Clock wise lock Bloquear inicio
CntRes Counter Reset Restablecer registro de contador
CntSel0-7 Counter Select Bit 0-7 Seleccionar registro de contador
DisRp Disable Report Suprimir emisión de resultados
DisRpFtp Disable Report Ftp Suprimir emisión de resultados a través de FTP
En Enable Autorización
EnScan 1) Enable Scanner Desbloquear escáner
JobAbort 1) Job Abort Cancelar trabajo
JobEnable 1) Job Enable Activar trabajo
JobResRs 1) Job Reset Result Restablecer resultado de trabajo
JobStart 1) Job Start Iniciar trabajo
Job0-7 1) Job 0-7 Selección de trabajo
ManOP 2) Manual Operation Mode Conmutación al modo manual
NokAc Not OK acknowledge Confirmación NOK
Prog0-7 Programa 0-7 Selección del programa
ResF Reset Fault Restablecer error del sistema
ResRs Reset Result Restablecer resultado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 75/265
ActEn Active Enable: Autorización de un proceso de atornillado independiente
La señal sirve para la autorización del canal de atornillado para un proceso de atornillado individual.
Después del atornillado, el canal de atornillado se bloquea para el próximo atornillado hasta que ActEn cambia de "High" a "Low" y de nuevo a "High". Ahora el canal de atornillado está listo para el próximo atornillado. Con este tipo de autorización el canal solo se desbloquea para un atornillado.
En la siguiente tabla se describe la autorización según la justificación de la tabla de asignación BMS.
ActScan Active Scanner: Autorización de un proceso de escaneado individual
La señal sirve para autorizar al escáner integrado en un atornillador para un proceso de escaneado indi-vidual.
El escáner se bloquea tras el escaneado hasta que ActScan cambia de "High" a "Low" y, de nuevo, a "High". El escáner está entonces desbloqueado para el próximo proceso de escaneado. Con este tipo de autorización el escáner solo se desbloquea para un proceso de escaneado.
AppIn0-15 Application In Bit 0-15: Señal de entrada específica de aplicación
Las señales específicas de la aplicación están diseñadas para ajustes especiales para las necesidades del cliente.
BoxNutLED0-7 Box Nut LED: conexión del LED0-7 en el soporte de casquillo para tuerca
Un sistema de rango superior informa con esta señal al sistema de atornillado 350 sobre el LED (0...7) que debe conectarse en el soporte de casquillo para tuerca.
BoxNutSel0-7 Box Nut Selected: casquillo para tuerca 0-7 seleccionado del soporte de casquillo para tuerca
El soporte de casquillo para tuerca informa con esta señal al sistema de atornillado 350 sobre el casquillo para tuerca (0…7) que se extrajo del soporte de casquillo para tuerca.
Ccw Counter clock wise: Desatornillado
Esta señal inicia el programa de atornillado Desatornillar n.º 99 en un canal de atornillado. La señal de arranque debe establecerse durante todo el proceso en "High", en caso contrario, el atornillado se inte-rrumpirá con NOK e "Interrupción mediante BMS". Una vez realizada la evaluación sin efectos sobre el atornillado OK/NOK se puede colocar en "Low".
Se ejecuta el programa N.º 99 desatornillar.
1. Soportado a partir de la versión 1100 del firmware Nexo2. Soportado a partir de la versión 1300 del firmware Nexo
Señal en la tabla de asignación BMS Función de desbloqueo
En1)
1. La señal sirve para la autorización del atornillador.
ActEn2)
2. La señal sirve para la autorización del atornillador para un proceso de atornillado individual.
No establecida No establecida Atornillador bloqueado.
Establecida No establecida La autorización del atornillador tiene lugar con la señal En igual a "High".
No establecida Establecida La autorización del atornillador solo tiene lugar cuando se cambia de Ac-tEn de "Low" a "High" para un proceso de atornillado individual.
Establecida Establecida El atornillador solo se desbloquea cuando la señal En se encuentra en "High" ocuando la señal ActEn cambia de "Low" a "High".
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

76/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
CcwIgnore Counter clock wise ignore: Ignorar interruptor izquierda
Esta señal ignora la posición del interruptor izquierda en el atornillador. Se ejecuta siempre el programa seleccionado.
CwIgnore Clock wise ignore: Ignorar interruptor derecha
Esta señal ignora la posición del interruptor derecha en el atornillador. Se ejecuta siempre el programa N.º 99.
CcwLock Counter clock wise lock: Bloquear desatornillado
Esta señal bloquea el programa de atornillado Desatornillar N.º 99 en un canal de atornillado.
Cw Clock wise: Comenzar atornillado en el sentido de las agujas del reloj
Con la señal de arranque Cw se arranca el programa de atornillado seleccionado. La señal de arranque permanece durante toda la ejecución en "High", hasta la evaluación OK/NOK. Si la señal de arranque Cw cambia durante un atornillado a "Low", el programa de atornillado se interrumpirá con NOK e "Inte-rrupción mediante BMS". Una vez realizada la evaluación sin efectos sobre el atornillado OK/NOK se puede colocar en "low".
Cuando se intenta iniciar un programa de atornillado defectuoso, el programa de atornillado finaliza inme-diatamente y se lleva a cabo una evaluación NOK. Cuando se intenta iniciar un programa de atornillado que no está disponible, se muestra una indicación en la pantalla que indica que este programa de ator-nillado no está disponible. No se realiza una evaluación.
Si la función Instalación en interruptor de arranque está activa, un arranque de atornillador se consi-derará no realizado cuando el par de apriete máximo generado ha quedado por debajo del umbral de par de apriete1 definido. En este caso el control no realiza ninguna evaluación (OK/NOK) ni ninguna emisión de resultados.
CwLock Clock wise lock: Bloquear inicio
Con esta señal se bloquea el inicio de un programa de atornillado seleccionado.
CntRes Counter Reset: Restablecer registro de contador
Si se establece esta señal como "High" ambos contadores del contador OK/NOK se restablecen a su estado inicial de programación. De manera simultánea el canal de atornillado se libera, esto quiere decir el contador OK/NOK resolverá un posible bloqueo de un atornillador.
CntSel0-7 Counter Select Bit 0-7: Seleccionar registro de contador
Con estas señales se seleccionan los contadores OK/NOK. La selección es independiente del programa de atornillado p. ej., mediante la otra unidad de control. Si antes de alcanzar el valor predeterminado para el contador OK/NOK se selecciona un nuevo registro de contador, se bloquea el canal (opcional) y se evalúa con CntCanceled = "High".
DisRp Disable Report: Suprimir emisión de resultados
Cuando la señal DisRp está establecida como "High", se puede suprimir la emisión de resultados (por ejemplo: emisión de impresora) para el programa de atornillado posterior. La supresión no es válida para las emisiones dentro del sistema operativo.
Al iniciar el programa N.º 99 mediante la señal Ccw no se realiza ningún test de punto cero.
1. Este umbral se puede ajustar en el paso inicial del programa de atornillado y en el ajuste básico su-pone un 5 % del par de apriete nominal del atornillador.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 77/265
DisRpFtp Disable Report Ftp: Suprimir emisión de resultados a través de FTP
La emisión de resultados FTP también puede suprimirse con ayuda de la señal DisRpFtp del BMS (señal DisRpFtp = "High"). De este modo para iniciar de nuevo no hay que esperar por la emisión de resultados. Esta función es importante sobre todo en el caso de varios programas de atornillado iniciados uno detrás de otros.
En Enable: Autorización
Cuando la señal En está establecida en "High", actúa como señal de autorización para el arranque del atornillador. Si la señal En cambia durante una secuencia de atornillado o durante un proceso a "Low", estos se interrumpirán y el programa de atornillado se evalúa como NOK.
EnScan Enable scanner: Desbloquear escáner
Esta señal desbloquea el escáner del atornillador durante un tiempo establecido "1", o lo bloquea "0".
La duración del desbloqueo se debe establecer en el sistema operativo NEXO-OS, en Ajustes Escáner Configuración del escáner.
JobAbort Job Abort: Cancelar trabajo
Esta señal cancela un trabajo en desarrollo.
JobEnable Job Enable: Activar trabajo
Esta señal activa un trabajo.
JobResRs Job Reset Result: restablecer resultado de trabajo
Esta señal establece la evaluación OK a "0", NOK a "1" y JobCyCmp a "0".
JobStart Job Start: Iniciar trabajo
Esta señal inicia un trabajo.
Job0-7 Job 0-7: Selección de trabajo
En estos bits se pueden seleccionar los trabajos del 0 al 249.
A través de estas ocho entradas el número de trabajo de codificación binaria se transmite a la unidad de control de atornillado. El número de trabajo es válido dentro de la unidad de control de atornillado cuando las señales para la confirmación del trabajo coinciden con la selección de trabajo. El número de trabajo debe estar seleccionado antes del inicio del desarrollo del trabajo y debe estar confirmado por el sistema.
ManOp Manual Operating Mode: activación del modo manual
Esta señal activa el modo manual del atornillador cuando, en el paso inicial, en el modo se activó la opción Señal BMS ManOp en Disparador. Si el atornillador cambia al modo manual se establecerá la señal en "1".
NokAc Not OK acknowledge: Confirmación NOK
El sistema de atornillado ofrece la posibilidad de evitar otro arranque tras un atornillado NOK. Solo es posible otro arranque cuando la señal NOKAc está establecida en "Low".
Esta función está activa si, en el momento del arranque, la señal NOKAc está establecida en "High". Des-pués de un atornillado NOK, el sistema de atornillado está de nuevo listo para el arranque restableciendo la señal NOKAc a "Low". Cuando el sistema de atornillado está listo para el arranque se indicará median-te las señales InCy o InCyCcw en "Low". Estableciendo NOKAc en "Low" también se restablece el NOK en la interfaz BMS.
Cuando el contador OK/NOK está configurado para el trabajo, este es seleccionado automáticamente al iniciar el trabajo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

78/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Prog0-7 Programa 0-7: Selección del programa
A través de estas ocho entradas el número de programa de codificación binaria se transmite a la unidad de control de atornillado. El número de programa es válido dentro de la unidad de control de atornillado cuando las señales para la confirmación del programa coinciden con la selección de programa. El número de programa debe estar seleccionado antes del inicio del atornillado y debe estar confirmado por el sis-tema.
ResF Reset Fault: Restablecer error del sistema
A través de esta entrada pueden confirmarse los errores del sistema de la clase de error 3. Si es posible la confirmación de errores, se confirma el error del sistema.
ResRs Reset Result: Restablecer resultado
Es aconsejable restablecer el resultado antes de cada nuevo arranque.
Con la señal ResRs = "High" se establecen CyCmp, OK, las señales de las funciones de supervisión, por ejemplo, TorqH y la señal TrigOut, en "Low", así como la señal NOK en "High".
Un restablecimiento del resultado (valor de señal es "High") no es la eliminación del código ID en la me-moria de entrada. Así se puede utilizar la secuencia de números.
Para borrar el código ID-después del inicio del atornillado, en el sistema operativo NEXO-OS, en el modo del paso de entrada ID, debe activarse la opción Borrar código ID después del inicio.
La señal NOKAc debe establecerse en "High" antes de las señales Cw o Ccw con el propósito de que la señal se tenga en cuenta para este atornillado.
Tras la puesta en marcha del atornillador de batería con control remoto Nexo, normalmente la señal NOKAc se establece en "High", si está establecida en el módulo BMS tool. Para que pueda iniciarse el atornillador se debe establecer la señal en "Low".
Cuando se establece la señal NOKAc en la entrada 0.3, 0.4 o 0.5 de la tabla BMS de un Nexo, la señal se invertirá, es decir, que la señal cambia a "Low" al pulsar la tecla de función y a "High" al soltarla.
Cuando el contador OK/NOK está configurado de manera adecuada para el programa este es seleccio-nado automáticamente por la selección de programa.
Programa de atorni-
llado
Prog7 Prog6 Prog5 Prog4 Prog3 Prog2 Prog1 Prog0
0 Low Low Low Low Low Low Low Low
1 Low Low Low Low Low Low Low High
2 Low Low Low Low Low Low High Low
3 Low Low Low Low Low Low High High
. . . . . . .
. . . . . . .
255 High High High Low High High High High
El programa 99 es el programa de desatornillado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 79/265
6.2.2 Señales de salida
Vista general de las señales de salida BMS
Señal Función DescripciónAck0-7 Acknowledge 0-7 Confirmación para selección del programa
ActEnAck Active Enable Acknowledge Confirmación para la autorización de un proceso de atornillado individual
ActScanAck 1)
1. Soportado a partir de la versión 1100 del firmware Nexo
Active Scanner Acknowledge Confirmación para la autorización de un proceso de escaneado individual
AnglH Angle too high Ángulo demasiado alto
AnglL Angle too low Ángulo demasiado bajo
AppOut0-15 Application Out Bit 0-15 Señal de salida específica de aplicación
BattOk Battery OK Comprobar el pack de baterías de inserción
BattOff Battery OFF Se ha extraído el pack de baterías de inserción
CntSelAck0-7 Counter Select acknowledge Bit 0-7 Confirmación selección registro de contador
CcwAck Counter clock wise acknowledge Confirmación para desatornillar
CntCanceled Counter canceled Registro de contador cancelado
CcwLockAck Counter clock wise lock acknowled-ge
Bloquear la confirmación para desatornillar
CCwSel Counter clock wise Select Se ha seleccionado el programa de desatornillado en el atornillador.
CwAck Clock wise acknowledge Confirmación para inicio
CwLockAck Clock wise lock acknowledge Confirmación para bloquear inicio
CntNOK Counter NOK Se ha alcanzado el valor predeterminado del contador NOK
CntOK Counter OK Se ha alcanzado el valor predeterminado del contador OK
CyCmp Cycle Complete Fin del proceso
CheckTool Check Tool Se ha alcanzado el intervalo de prueba del atornillador
EnAck Enable acknowledge Confirmación para autorización
EnScanAck 1) Enable scanner acknowledge Confirmación para desbloquear escáner
FtpF Ftp Fault Error de transmisión de resultados
InCy In Cycle El programa de atornillado está activo
InCyCcw In Cycle Counter clock wise Desatornillar activo
JobAck0-7 1) Job acknowledge 0-7 Confirmación para selección de trabajo
JobCyCmp 1) Job Cycle Complete Trabajo finalizado
JobIncy 1) Job In Cycle Trabajo activo
JobNOK 1) Job Not OK Resultado del trabajo no OK
JobOK 1) Job OK Resultado del trabajo OK
JobRdy 1) Job ready Trabajo preparado
ManOpAck 2) Manual Operating Mode Acknowled-ge
Confirmación del modo manual
NF No Fault Atornillador sin error del sistema
Nok Not OK Resultado no OK
Ok OK Resultado OK
RC0-4 1) Rework Code Bit 0-4 Código de retoque bit 0-4
Rdy Ready Atornillador listo para funcionar
ScanRdy 1) Scanner ready Escáner preparado
ScanRxID 1) Scanner read ID Código de barras leído
StartBn Botón de arranque Estado del interruptor de arranque
TimeH Time too high Tiempo demasiado alto
TorqH Torque too high Par de apriete demasiado alto
TorqL Torque too low Par de apriete demasiado bajo
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

80/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Ack0-7 Acknowledge 0-7: Confirmación para selección del programa
La señal confirma la selección de programa.
Con ayuda de estas señales el BMS puede determinar si la selección de programa de atornillado se ha realizado con éxito. Solo cuando la confirmación coincide con la selección es válido el número de pro-grama. El control siempre se basa en los números de programa confirmados para el atornillado.
ActEnAck Active Enable: Confirmación para la autorización de un proceso de atornillado individual
La señal sirve para confirmar que se ha autorizado el canal de atornillado para un proceso de atornillado individual.
ActScanAck Active Scanner: Confirmación para la autorización de un proceso de escaneado individual
La señal sirve para confirmar que se ha autorizado al escáner integrado en el atornillador para un proceso de escaneo individual.
AnglH Angle too high: Ángulo demasiado alto
Descripción del resultado tras finalizar la secuencia de atornillado. El ángulo está por encima del umbral de tolerancia definido.
AnglL Angle too low: Ángulo demasiado bajo
Descripción del resultado tras finalizar la secuencia de atornillado. El ángulo está por debajo del umbral de tolerancia definido.
AppOut0-15 Application Out Bit 0-15: Señal de salida específica de aplicación
Las señales específicas de la aplicación están diseñadas para ajustes especiales para las necesidades del cliente. Son adecuados por ejemplo para transmitir en bucle las señales: una señal puede ser leída por el control a través del módulo interfaz y ser transmitida por el control hasta la otra unidad de control.
BattOK Battery OK: Estado del pack de baterías de inserción
Esta señal indica el estado del pack de baterías de inserción.
BattOK = "High": La batería está OK. Si el estado de carga de la batería no permite realizar más atorni-lladuras o la batería está defectuosa, la señal cambia a "Low".
BattOff Battery Off: Pack de baterías de inserción no colocado.
Esta señal indica si el pack de baterías de inserción está colocado o no.
BattOff = "High": La batería no está colocada. La señal cambia a "Low" cuando se ha colocado la bate-ría.
CntSelAck0-7 Counter Select acknowledge Bit 0-7: Confirmación selección registro de contador
Con estas señales se confirma la selección del registro de contadores mediante las señales CntSel0-7. La señal CntSelAck0-7 se emite únicamente al seleccionar la opción Selección de señales BMS Cnt-Sel0...CntSel7 en el contador OK/NOK.
CcwAck Counter clock wise acknowledge: Confirmación para desatornillar
Esta señal confirma que se ha iniciado el programa de atornillado Desatornillar n.º 99 en un canal de ator-nillado.
CntCanceled Counter canceled: Registro de contador cancelado
Con CntCanceled = "High" se muestra la cancelación de un registro de contador. La señal CntCanceled se emite únicamente al cambiar de programa en un registro de contadores que no ha finalizado. La opción Selección de señales BMS Pro0...Prog7 debe estar seleccionada en el contador OK/NOK.
CcwLockAck Counter clock wise lock acknowledge: Bloquear la confirmación para desatornillar
Esta señal confirma el bloqueo del programa de atornillado Desatornillar N.º 99 en un canal de atornillado.
2. Soportado a partir de la versión 1300 del firmware Nexo
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
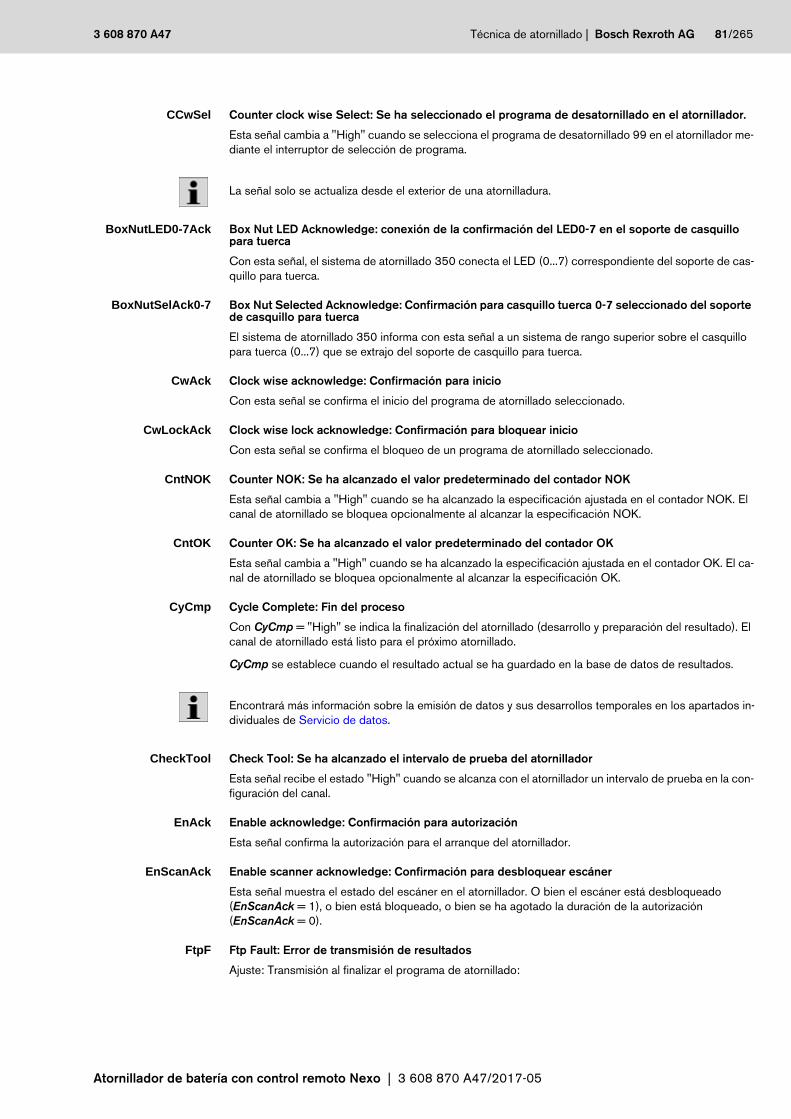
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 81/265
CCwSel Counter clock wise Select: Se ha seleccionado el programa de desatornillado en el atornillador.
Esta señal cambia a "High" cuando se selecciona el programa de desatornillado 99 en el atornillador me-diante el interruptor de selección de programa.
BoxNutLED0-7Ack Box Nut LED Acknowledge: conexión de la confirmación del LED0-7 en el soporte de casquillo para tuerca
Con esta señal, el sistema de atornillado 350 conecta el LED (0...7) correspondiente del soporte de cas-quillo para tuerca.
BoxNutSelAck0-7 Box Nut Selected Acknowledge: Confirmación para casquillo tuerca 0-7 seleccionado del soporte de casquillo para tuerca
El sistema de atornillado 350 informa con esta señal a un sistema de rango superior sobre el casquillo para tuerca (0...7) que se extrajo del soporte de casquillo para tuerca.
CwAck Clock wise acknowledge: Confirmación para inicio
Con esta señal se confirma el inicio del programa de atornillado seleccionado.
CwLockAck Clock wise lock acknowledge: Confirmación para bloquear inicio
Con esta señal se confirma el bloqueo de un programa de atornillado seleccionado.
CntNOK Counter NOK: Se ha alcanzado el valor predeterminado del contador NOK
Esta señal cambia a "High" cuando se ha alcanzado la especificación ajustada en el contador NOK. El canal de atornillado se bloquea opcionalmente al alcanzar la especificación NOK.
CntOK Counter OK: Se ha alcanzado el valor predeterminado del contador OK
Esta señal cambia a "High" cuando se ha alcanzado la especificación ajustada en el contador OK. El ca-nal de atornillado se bloquea opcionalmente al alcanzar la especificación OK.
CyCmp Cycle Complete: Fin del proceso
Con CyCmp = "High" se indica la finalización del atornillado (desarrollo y preparación del resultado). El canal de atornillado está listo para el próximo atornillado.
CyCmp se establece cuando el resultado actual se ha guardado en la base de datos de resultados.
CheckTool Check Tool: Se ha alcanzado el intervalo de prueba del atornillador
Esta señal recibe el estado "High" cuando se alcanza con el atornillador un intervalo de prueba en la con-figuración del canal.
EnAck Enable acknowledge: Confirmación para autorización
Esta señal confirma la autorización para el arranque del atornillador.
EnScanAck Enable scanner acknowledge: Confirmación para desbloquear escáner
Esta señal muestra el estado del escáner en el atornillador. O bien el escáner está desbloqueado (EnScanAck = 1), o bien está bloqueado, o bien se ha agotado la duración de la autorización (EnScanAck = 0).
FtpF Ftp Fault: Error de transmisión de resultados
Ajuste: Transmisión al finalizar el programa de atornillado:
La señal solo se actualiza desde el exterior de una atornilladura.
Encontrará más información sobre la emisión de datos y sus desarrollos temporales en los apartados in-dividuales de Servicio de datos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

82/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Si al transmitir al servidor FTP aparece un error, la señal de error FtpF se establece en "High". Después de la siguiente transmisión de datos que tenga éxito esta señal se establece automáticamente como "Low".
Ajuste: Transmisión antes de finalizar el programa de atornillado:
Si no es posible realizar una transmisión a través de Ethernet, el programa de atornillado o el proceso de atornillado se finalizan inmediatamente. La señal de error FtpF es "High" (error FTP) y se realiza la entrada correspondiente en la lista de errores.
GradAvrH Gradient average too high: valor medio de gradiente demasiado alto
Descripción del resultado tras finalizar la secuencia de atornillado. El valor medio de gradiente está por encima del umbral de tolerancia definido.
GradAvrL Gradient average too low: valor medio de gradiente demasiado bajo
Descripción del resultado tras finalizar la secuencia de atornillado. El valor medio de gradiente está por debajo del umbral de tolerancia definido.
GradH Gradient too high: gradiente demasiado alto
Descripción del resultado tras finalizar la secuencia de atornillado. El gradiente está por encima del um-bral de tolerancia definido.
GradL Gradient too high: gradiente demasiado bajo
Descripción del resultado tras finalizar la secuencia de atornillado. El gradiente está por debajo del um-bral de tolerancia definido.
InCy In Cycle: El programa de atornillado está activo
Esta señal indica el inicio de un programa de atornillado en otra unidad de control. Es especialmente im-portante para los sistemas de atornillado manuales.
Cuando la señal InCy está establecida como "High" las señales CyCmp, OK y NOK se establecen como "Low". Cuando el desarrollo del programa de atornillado (CyCmp = "High", señal de arranque Cw esta-blecida como "Low") ha finalizado, la señal InCy pasa a "Low".
InCyCcw In Cycle Counter clock wise: Desatornillar activo
Esta señal indica que hay un programa de atornillado activo. Es especialmente importante para los siste-mas de atornillado manuales.
Cuando la señal InCyCcw está establecida como "High" las señales CyCmp, OK y NOK se establecen como "Low". Cuando el desarrollo del programa de atornillado (CyCmp = "High") ha finalizado y se ha establecido la señal de arranque FO x Cw como "Low", la señal InCyCcw pasa a "Low".
JobAck0-7 Job acknowledge 0-7: Confirmación para selección de trabajo
La señal confirma la selección de trabajo.
El BMS puede determinar con estas señales si la selección de trabajos se ha realizado con éxito. Solo cuando la confirmación coincide con la selección es válido el número de trabajo. El control siempre se basa en los números de trabajo confirmados para el desarrollo del trabajo.
En caso de utilización de la señal NOKAc la señal InCy permanece en "High" con una atornillado NOK, hasta que la señal NOKAc se establece como "Low". La señal InCy solo cambia a "Low" después y de este modo indica que está listo para su funcionamiento de nuevo.
En caso de utilización de la señal NOKAc la señal InCy permanece en "High" con una atornillado NOK, hasta que la señal NOKAc se establece como "Low". La señal InCyCcw solo cambia a "Low" después y de este modo indica que está listo para su funcionamiento de nuevo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 83/265
JobCyCmp Job Cycle Complete: Trabajo finalizado
Con Job CyCmp = "High" se indica la finalización del atornillado (preparación del desarrollo y resultado). El canal de atornillado está listo para el próximo atornillado.
JobInCy Job In Cycle: Trabajo activo
Esta señal indica el inicio de un trabajo en otra unidad de control. Es especialmente importante para los sistemas de atornillado manuales.
Cuando la señal Job InCy está establecida como "High" las señales Job CyCmp, JobOK y JobNOK se establecen en "Low". Cuando el desarrollo del trabajo (Job CyCmp = "High", señal de inicio Job Start establecida en "Low") ha finalizado, la señal Job InCy pasa a "Low".
JobNok Job Not OK: Resultado del trabajo no OK
Esta señal indica que el trabajo fue evaluado como no OK.
JobOk Job OK: Resultado del trabajo OK
Esta señal indica que el trabajo fue evaluado como OK.
JobRdy Job ready: Trabajo preparado
Solo se puede iniciar un trabajo para un canal de atornillado cuando la señal JobRdy indica "preparado" (señal JobRdy = "High").
ManOpAck Manual Operating Mode acknowledge: confirmación del modo manual
Esta señal confirma el modo manual.
NF No Fault: Atornillador sin error del sistema
NF = "High": sin error del sistema. Si existe un error, esta señal se establece como "Low". Se interrumpe un proceso de atornillado o no se realiza un arranque del control.
Nok Not OK: Resultado no OK
Esta señal indica que el proceso de atornillado fue evaluado como NOK. Después de borrar los resulta-dos, mediante la señal ResRs se establece la señal NOK en "High" y después del arranque del proceso de atornillado se establece en "Low".
Ok OK: Resultado OK
Esta señal indica que el proceso de atornillado fue evaluado como OK. Con el arranque del programa de atornillado posterior o borrando los resultados se establecen en "Low" mediante la señal ResRs.
RC0-4 Rework Code Bit 0-4: Código de retoque bit 0-4
El código de retoque de codificación binaria se emite por estas cinco señales de salida. Utilizando un código de retoque se pueden comunicar al usuario los pasos necesarios para retocar un atornillado eva-luado como NOK (por ejemplo: como texto en la pantalla del atornillador).
Estas señales se establecen al final del atornillado; cambian al inicio del atornillado y al establecer en "Low" la señal Reset Result.
RC0-4 Rework Code Bit 0-4: Código de retoque bit 0-4
El código de retoque de codificación binaria se emite por estas cinco señales de salida. Utilizando un código de retoque se pueden comunicar al usuario los pasos necesarios para retocar un atornillado eva-luado como NOK.
Estas señales se establecen al final del atornillado; cambian al inicio del atornillado y al establecer en "Low" la señal Reset Result.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

84/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Rdy Ready: Atornillador listo para funcionar
Solo se puede arrancar un canal de atornillado cuando la señal Rdy indica "preparado" (señal Rdy = "High").
Las posibles causas para Rdy = "Low" son:
• Proceso de inicio en marcha
• Error del sistema. Encontrará una lista de los posibles errores en el sistema operativo NEXO-OS en Diagnóstico Error del sistema.
ScanRdy Scanner ready: Escáner preparado
Esta señal muestra el estado actual del escáner en el atornillador. El escáner está preparado cuando ScanRdy = "High". En caso contrario, el escáner está bloqueado, no está preparado o no existe.
ScanRxID Scanner read ID: Código ID leído
La otra unidad de control externa comunica con esta señal que se ha detectado un código ID en el es-cáner del atornillador.-
StartBn Start Button: Estado del interruptor de arranque
Esta señal indica el estado del interruptor de arranque del atornillador. Si el interruptor de arranque está presionado la señal está establecida como "High", al soltarlo cambia a "Low".
StickSlipH Stick Slip too high: el número de stick slips es demasiado elevado
Descripción del resultado tras finalizar la secuencia de atornillado. El número de stick slips está por en-cima del valor de tolerancia definido.
TimeH Time too high: Tiempo demasiado alto
Descripción del resultado tras finalizar la secuencia de atornillado. El tiempo está por encima del valor de tolerancia definido.
ToolBn Botón de herramienta: estado del botón de herramienta en el atornillador
Esta señal describe el estado del botón de herramienta en el atornillador de batería con control remoto Nexo. Si el botón de herramienta está presionado, la señal está establecida como "High", al soltarlo cam-bia a "Low".
TorqH Torque too high: Par de apriete demasiado alto
Descripción del resultado tras finalizar la secuencia de atornillado. El par de apriete está por encima del umbral de tolerancia definido.
TorqL Torque too low: Par de apriete demasiado bajo
Descripción del resultado tras finalizar la secuencia de atornillado. El par de apriete está por debajo del umbral de tolerancia definido.
La señal solo se actualiza desde el exterior de una atornilladura.
Esta señal solo está activa en los canales de atornillado con ErgoSpin. La señal solo se actualiza desde el exterior de una atornilladura.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

7 Servicio de datos
Este capítulo describe los conceptos básicos para la utilización de los diferentes ser-vicios de datos, que se pueden utilizar para la emisión de datos o para el intercambio de datos con otra unidad de control.
• Vista general de la comunicación de resultado de atornillado (página 86)• Emisión de datos a través de FTP (página 87)• Emisión de datos a través de HTTP (página 89)• Emisión de datos por medio de File Share (página 90)• Rexroth Open Protocol (página 91)• Rexroth IPM Protocol (página 163)• Protocolo VW-XML (página 166)

86/265 Bosch Rexroth AG | Técnica de atornillado
7.1 Vista general de la comunicación de resultado de atornillado
Los resultados del atornillador se pueden transmitir desde el atornillador de batería Nexo a través del pun-to de acceso en los aparatos para continuar con el procesado o el almacenamiento. Como servicio de datos para la transferencia de datos entre estas unidades, están disponibles los siguientes protocolos:
• File Transfer Protocol (FTP) basado en TCP/IP
• A partir de la versión 1200 del firmware Nexo: Hypertext Transfer Protocol (HTTP)
• A partir de la versión 1200 del firmware Nexo: File Share
• Rexroth Open Protocol, basado en un protocolo de comunicación TCP/IP especial para la unidad de control de atornillado.
• Rexroth IPM Protocol, que sirve para la transmisión de los resultados del atornillador y las curvas de tornillo a través de TCP/IP en un sistema para gestión de datos de proceso integrado (IPM).
• A partir de la versión 1200 del firmware Nexo: protocolo VW-XML
Estos protocolos también se pueden utilizar de manera paralela.
Los ajustes para estos protocolos se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos, véase el apartado Ajustes en la página 204.
7.1.1 Código de identificación (código ID)
El registro de datos de resultado de un atornillado se indica con un código de identificación (código ID) para continuar con el procesado interno o externo y de este modo puede asignarse a un componente atornillado.
El código ID-puede contener hasta 100 caracteres ASCII como, por ejemplo, piezas que disponen de un número de herramienta, número de fabricación, número de serie, número de bastidor, etc.
El código ID se transmite al control antes de comenzar el proceso de atornillado. Como alternativa a este proceso se puede utilizar, en lugar de un código ID, el contador de ciclos internos o el Open Rexroth Protocol para la formación del código ID. Si el atornillador de batería con control remoto Nexo dispone de un escáner de códigos de barras, se puede utilizar como código ID el código de barras válido leído o partes de este.
Cualquier servicio de datos necesita tiempo de máquina y amplía así la duración de ciclo de atornillado. Por eso tiene sentido activar solo los servicios de datos necesarios, para evitar retrasos.
A partir de la versión 1100 del firmware Nexo, establezca los ajustes para el código ID para identificar un registro de datos de los resultados (fuente de código ID) en la opción de menú Modo (véase la página 185).

Técnica de atornillado | Bosch Rexroth AG 87/265
7.2 Emisión de datos a través de FTP
FTP ofrece mecanismo adecuados para una transmisión de datos adecuada en Ethernet. Mediante los protocolos de errores y las sumas de control, y dado el caso, la retransmisión de bloques de datos se garantiza una calidad de transmisión elevada.
En una transmisión de datos por FTP se distinguen dos tipos de conexión:
• explícita (FTPES),
• implícita (FTPS).
El atornillador de batería con control remoto Nexo soporta el modo explícito. Esto significa que el cliente FTPS debe "solicitar explícitamente" la seguridad de un servidor FTPS y una de las dos partes deberá aproximarse con el método de codificación aceptado. Si un cliente no solicita la seguridad, el servidor FTPS podrá autorizarla o denegar la conexión.
El FTP tiene una estructura Cliente/Servidor, esto quiere decir que un servidor FTP pone sus servicios a disposición de un cliente FTP, el atornillador de batería Nexo de control remoto. El cliente FTP es el par-ticipante activo y puede escribir datos en el servidor FTP o leer datos desde allí. En el atornillador de ba-tería con control remoto Nexo solo se utiliza el acceso de escritura.
El acceso al servidor FTP está protegido por un nombre de usuario y una contraseña. El protocolo de la transmisión de datos está definido en el RFC-959 (File Transfer Protocol). A partir de la versión 1200 del firmware Nexo se pueden transmitir los datos con codificación SSL. El almacenamiento del archivo de resultados y el contenido del archivo de resultados pueden configurarse mediante diversos parámetros.
7.2.1 Establecimiento y finalización de conexiones FTP a edición de resultados
El sistema inicia el establecimiento y finalización de conexiones FTP.
La transmisión de los datos de los resultados se realiza de manera asincrónica al proceso de atornillado (después del fin del atornillado). Los registros de datos de resultados se almacenan mientras son archi-vados por el atornillador de batería con control remoto Nexo dentro del proceso de atornillado, es decir, antes de CyCmp. La transmisión de datos se realiza desvinculada del ciclo de atornillado. No se originan prejuicios para la función de atornillado, mientras haya disponible suficiente espacio de almacenamiento para nuevos archivos de resultados.
Todos los archivos de resultados se transmiten en forma de bloque al servidor FTP de la unidad de con-trol (otra unidad de control). Se establece una conexión FTP cuando existen datos de resultados. Si al transmitir al servidor FTP aparece un error, la señal de error FtpF se establece en 1. Después de la si-guiente transmisión de datos que tenga éxito esta señal se establece de nuevo automáticamente en 0.
A partir de la versión 1200 del firmware Nexo: los ajustes para el protocolo se realizan en el sistema ope-rativo NEXO-OS, en el menú Ajustes Datos Standard Nexo FTP , véase el apartado Ajustes en la página 204.

88/265 Bosch Rexroth AG | Técnica de atornillado
7.2.2 Cantidad de datos y tiempo de transmisión esperado para archivos de resultados de atornillado.
La cantidad de datos depende de los siguientes criterios:
• El número de puntos de curva configurados en el programa de atornillado
• El rango de valores de los parámetros de las curvas
• El número de pasos de atornillado
• El número de funciones destino y de supervisión activas del paso correspondiente
la mayor parte del volumen de datos es necesario para la memorización de los puntos de curvas. Aquí son válidos los siguientes valores orientativos aproximados: Para cada punto de curva se necesitan como mínimo 10 Bytes.
En caso de un máximo de 2000 puntos de curva resultan como mínimo:
10 Bytes x 2000 puntos de curva x 3 tipos de curva = 58 KBytes datos de puntos de curva

Técnica de atornillado | Bosch Rexroth AG 89/265
7.3 Emisión de datos a través de HTTP
En la transmisión de datos de resultados a través de HTTP (Hypertext Transfer Protocol), la unidad de control de atornillado establece una conexión al servidor HTTP. En el protocolo HTTP 1.1 se intercambia un registro de datos de resultados dentro de una conexión. Una vez realizada la transmisión de datos no se puede mantener la conexión entre el sistema de atornillado y el servidor. Para la transmisión de otros resultados la unidad de control de atornillado establece una nueva conexión.
Figura 7–1: Transmisión de datos de resultados por HTTP
A partir de la versión 1200 del firmware Nexo se soporta la emisión de datos a través de HTTP.
Los ajustes para la emisión de datos se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos Standard Nexo HTTP , véase el apartado Ajustes en la página 204.
Unidad de control de atornillado
Registro de datos de resultados por POST de HTTP
• Encabezamiento de HTTP:HostAgente de usuarioTipo de contenidoConexiónLongitud de contenido
• Registro de datos de resultados en formato"Standard Nexo" configurado
Servidor HTTPEstablecimiento de conexión
Confirmación con "200 OK"
Interrupción de conexión

90/265 Bosch Rexroth AG | Técnica de atornillado
7.4 Emisión de datos por medio de File Share
File Share es un protocolo que permite el acceso a archivos a través de una red.
Figura 7–2: transmisión de datos de resultados por File Share
El acceso al servidor File Share está protegido mediante un ID de grupo y un ID de usuario.
A partir de la versión 1200 del firmware Nexo se soporta la emisión de datos por medio de File Share.
Los ajustes para la emisión de datos se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos Standard Nexo File Share, véase el apartado Ajustes en la página 204.
Unidad de control de atornillado Registro de datos de resultados en formato
"Standard Nexo" configurado
Directorio de destino

Técnica de atornillado | Bosch Rexroth AG 91/265
7.5 Rexroth Open Protocol
Este capítulo describe la comunicación entre un ordenador de rango superior y la unidad de control de atornillado mediante el Rexroth Open Protocol. En la comunicación, el ordenador de rango superior opera como cliente y la unidad de control de atornillado como servidor.
Rexroth Open Protocol, basado en un protocolo de comunicación TCP/IP especial para la unidad de con-trol de atornillado. Con él puede administrarse hasta como mínimo 5 clientes conectados entre sí. Por medio del cliente, el usuario puede configurar una unidad de control de atornillado e informarse de los resultados en la unidad de control de atornillado.
Ejemplo de desarrollo de una comunicación:
Los ajustes para el protocolo se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos Open Protocol, véase el apartado Ajustes en la página 204.
El cliente se conecta con la unidad de control de atornillado mediante MID 0001
La unidad de control de atornillado envía una confirmación MID 0002
La unidad de control de atornillado establece de nuevo keep-alive timeout
El cliente envía MID 0060
La unidad de control de atornillado confirma con MID 0005
La unidad de control de atornillado establece keep-alive timeout
La unidad de control de atornillado envía resultados de atornillado al cliente
La unidad de control de atornillado espera a la confirmación (Ack) del cliente para Response Timeout-segundos
La unidad de control de atornillado envía confirmación
Sí No
Atornillado La conexión la establece la unidad de control de atornillado
Número de intentos < 4

92/265 Bosch Rexroth AG | Técnica de atornillado
7.5.1 Diagramas de los procesos - Ejemplos
Cancelación de la conexión remota

Técnica de atornillado | Bosch Rexroth AG 93/265
Escanear código de barras

94/265 Bosch Rexroth AG | Técnica de atornillado
Selección de trabajo mediante código ID enviado por Open Protocol
MID 0500
Atornillador Sistema de rango superior (receptor OP)
MID 0005
MID 0504
MID 0005
MID 0501
MID 0150
MID 0005
Crear código ID
MID 0501
Trabajo seleccionado y
ejecutado
Suscripción de los cambios de las señales de salida BMS: En los cambios de la señal de salida BMS informará
al receptor OP
La señal de salida BMS «Job Reset Result» se establece
Señal de salida BMS JobCyCmp = «Low»
Enviar el código ID al atornillador
salida BMS JobCyCmp = «High»

Técnica de atornillado | Bosch Rexroth AG 95/265
7.5.2 Creación de mensajes
Un mensaje en Rexroth Open Protocol está creado en formato ASCII y está compuesto por:
• Header (ver tabla 7–1)
• Datos (véase tablas 7–2, 7–3 y 7–4)
• caracteres finales (véase tabla 7–5)
La tabla siguiente explica la estructura de los mensajes.
Las siguientes tablas explican la estructura de los datos.
Tabla 7–1: Estructura de mensajes en Open Protocol (Header)
Componentes del encabezado Significado BytesLongitud de los mensajes Longitud del encabezado + longitud de datos
Rango de valores: 0000 – 9999
Ejemplo:
4
Longitud del encabezado 20 Bytes
Longitud de datos 37 Bytes
Valor 0057
MID (Message ID) Describe cómo hay que interpretar el mensaje enviado. Cada messa-ge ID está asignado a una mensaje determinado.
Rango de valores: 0000 – 9999
Ejemplo:
4
Valor 0002
Mensaje Confirmación inicio de comunicación
Revisión Es necesario si están disponibles varias versiones para un mismo MID.
Rango de valores: 000 – 999
Ejemplo:
3
Revisión 1
Valor 001
No Ack Flag Solo para subscritos MIDs
Preajuste: 0
Modo eficaz:
Si no se ha establecido No Ack Flag (valor = 0), el sistema de atorni-llado espera una confirmación de los mensajes.
Modo no eficaz:
Si se ha establecido No Ack Flag (valor = 1), el sistema de atornillado no espera una confirmación de los mensajes.
1
Reserva Lugar reservado para futuras ampliaciones del encabezado.
Este lugar debe rellenarse con ocho caracteres, los cuales no son analizados (p. ej., 00000000).
8
Longitud del encabezado 20

96/265 Bosch Rexroth AG | Técnica de atornillado
Cuando el valor de un parámetro está definido solo con cifras, el resto de los caracteres de la izquierda se rellenan con ceros.
Cuando el valor de un parámetro está definido con caracteres ASCII entre 0x20 y 0x7F, la zona de la derecha se rellena con espacios < >.
Con los valores mencionados anteriormente a modo de ejemplo, el mensaje sería el siguiente:
0057000200110000000010001020103controller1 NUL
El significado de cada uno de los valores es:
• 0057: Longitud de los mensajes
• 0002: MID
• 001: Revisión
• 1: No Ack Flag
• 00000000: Reserva
• 010001020103controller1 : Valor campo de datos
• NUL: Caracteres finales (ASCII (0x00))
Tabla 7–2: Estructura de mensajes en Open Protocol (datos: general)
Datos BytesEjemplo:
Parámetros Valor Rango de valores
ID de celdas 01 2
Valor de celda 0001 0000 – 9999 4
ID de canal 02 2
Valor de canal 01 00 – 99 2
Sistema de atornillado ID 03 2
Nombre del sistema de atorni-llado
controller1 25
Valor 010001020103Scontro-ller1
Longitud de datos 37
Tabla 7–3: Estructura de mensajes en Open Protocol (datos: números)
Datos BytesEjemplo:
Valor de ID de celdas 1
Valor 0001 4
Valor ID de canal 1
Valor 01 2
Tabla 7–4: Estructura de mensajes en Open Protocol (datos: caracteres ASCII)
Datos BytesEjemplo:
Nombre del sistema de atornillado
controller1
Valor controller1 25
Tabla 7–5: Estructura de mensajes en Open Protocol (caracteres finales)
Caracteres finales BytesEl valor del carácter final es siempre "NUL". El carácter final no se in-cluye en la longitud total del mensaje.
Valor NUL 1
Longitud de caracteres finales 1

Técnica de atornillado | Bosch Rexroth AG 97/265
7.5.3 Mensajes
7.5.3.1 Mensajes disponibles
A partir de la versión 1100 del firmware Nexo está disponible el Open Protocol "Rexroth OP-Ford".
Tabla 7–6: Mensajes disponibles
MID Descripción Rexroth OP
Rexroth OP-Ford
MID 0001 Inicio de comunicación x x
MID 0002 Confirmación inicio de comunicación x x
MID 0003 Parada de comunicación x x
MID 0004 Error de comando x x
MID 0005 Comando aceptado x x
MID 0010 Solicitud upload programa de atornillado-números x x
MID 0011 Respuesta upload programa de atornillado-números x x
MID 0012 Solicitud upload programa de atornillado x x
MID 0013 Respuesta upload datos de programa de atornillado x x
MID 0014 Seleccionado suscripción programa de atornillado x x
MID 0015 Seleccionado programa de atornillado x x
MID 0016 Seleccionada confirmación programa de atornillado x x
MID 0017 Seleccionada anulación suscripción programa de atornillado x x
MID 0018 Seleccionar programa de atornillado x x
MID 0019 Establecer preajuste para el contador OK/NOK x x
MID 0020 Restablecer el contador OK/NOK x x
MID 0021 Desactivar el contador OK/NOK x
MID 0030 Solicitud upload contador OK x
MID 0031 Respuesta upload contador OK x
MID 0040 Solicitud upload datos de herramienta x x
MID 0041 Upload datos de herramienta x x
MID 0042 Desactivar herramienta x x
MID 0043 Activar herramienta x x
MID 00451) Solicitud establecer valor de calibrado x
MID 0050 Solicitud de descarga de código ID x x
MID 0150 Solicitud de descarga de código ID x
MID 0051 Suscripción upload código ID x x
MID 0052 Upload código ID x x
MID 0053 Confirmación upload código ID x x
MID 0054 Dar de baja la suscripción upload código ID x x
MID 0060 Suscripción a los últimos datos de resultados de atornillado x x
MID 0061 Respuesta upload datos de resultados de atornillado x x
MID 0062 Confirmación últimos datos de resultados de atornillado x x
MID 0063 Dar de baja últimos datos de resultados de atornillado x x
MID 0064 Solicitud de upload resultado de atornillado archivado x x
MID 0065 Respuesta resultado de atornillado archivado x x
MID 0070 Suscripción de error de sistema emergente x x
MID 0071 Upload error del sistema emergente x x
MID 0072 Confirmación upload error del sistema x x
MID 0073 Anulación suscripción para errores de sistema x x
MID 0074 Confirmado error del sistema en la unidad de control de atornillado x x
MID 0075 Confirmación error del sistema en la unidad de control de atornillado x x
MID 0076 Estado de error del sistema x x
MID 0077 Confirmación estado de error de sistema x x
MID 0078 Confirmar error del sistema en la unidad de control de atornillado x
MID 0080 Solicitud de la hora en la unidad de control de atornillado x x

98/265 Bosch Rexroth AG | Técnica de atornillado
7.5.3.2 Especificación de mensajes
MID 0001 Inicio de comunicación
MID 0081 Upload de la hora x x
MID 0082 Ajustar la hora en la unidad de control de atornillado x x
MID 0111 Indicación en la pantalla gráfica del atornillador x
MID 01272) Cancelar trabajo x
MID 0400 Suscripción automática/modo manual x
MID 0401 Upload automático/modo manual x
MID 0402 Confirmación Upload automático/modo manual x
MID 0403 Anulación automática/modo manual x
MID 04043) Selección automática/modo manual x
MID 04102) Solicitud de ajuste AutoDisable x x
MID 04112) Respuesta de ajuste AutoDisable x x
MID 0500 Suscripción modificación de las señales de salida x
MID 0501 Actualización de la modificación de las señales de salida x
MID 0502 Confirmación de la actualización de la modificación de las señales de salida x
MID 0503 Anulación modificación de las señales de salida x
MID 0504 Modificar el valor de las señales de entrada x
MID 05701) Activar trabajo x
MID 05711) Iniciar desarrollo del trabajo x
MID 05731) Seleccionar número de trabajo x
MID 08001) Solicitud estado de carga de batería x x
MID 08011) Respuesta estado de carga de batería x x
MID 08021) Suscripción modificación de estado de carga de batería x x
MID 08031) Upload modificación de estado de carga de batería x x
MID 08041) Anulación de la suscripción modificación de estado de carga de batería x x
MID 08051) Requisito de la potencia de recepción x x
MID 08061) Respuesta potencia de recepción x x
MID 08071) Suscripción modificación de la potencia de recepción x x
MID 08081) Upload modificación de la potencia de recepción x x
MID 08091) Anulación de la suscripción modificación de potencia de recepción x x
MID 9999 Mensaje keep-alive x x
1. A partir de la versión 1100 del firmware Nexo se soporta este mensaje.2. A partir de la versión 1200 del firmware Nexo se soporta este mensaje.3. A partir de la versión 1300 del firmware Nexo se soporta este mensaje.
Tabla 7–6: Mensajes disponibles
MID Descripción Rexroth OP
Rexroth OP-Ford
Enviado por: ordenador de rango superior
Activa la conexión de comando Antes de eso la unidad de control de atornillado no reacciona a ningún otro comando.
Aviso: debe enviarse este mensaje para conectar al cliente con el sistema de atornillado.
Revisión: véase MID 0002
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Confirmación inicio de comunicación 0002
Error de comando 0004 96 El cliente ya está conectado

Técnica de atornillado | Bosch Rexroth AG 99/265
MID 0002 Confirmación inicio de comunicación
MID 0002 Revisión 001
MID 0002 Revisión 002
Enviado por: Unidad de control de atornillado
En caso de recepción de la comunicación, la unidad de control de atornillado envía una confirmación del inicio de la comunicación como respuesta. Este mensaje contiene informaciones básicas sobre la unidad de control de atorni-llado, que acepta la conexión (ID de celda, ID de canal, nombre del control, etc.).
Aviso: -Revisión: 001, 002, 003
Campo de datos: Datos útiles 37 Bytes (Revisión 001), 42 Bytes (Revisión 002), 105 Bytes (Revisión 003)
Posible respuesta: ninguna
Tabla 7–7: MID 0002 Revisión 001
Parámetros Observación BytesID de celdas Aquí se el 7. Devolver la denominación del lugar
El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores 0000 – 9999
Preajuste 0001
Ejemplo:
ID de celdas 3
Valor 0003 4
ID de canal Como ID del canal se especifica el valor determinado para el número de canal en la configuración del canal. Rango de valores 1 -99
ID 02 2
Rango de valores 01 – 20
Preajuste 01
Ejemplo:
Número de canal 04
Valor 04 2
Nombre del control Como nombre del control se especifica el nombre del canal determinado en la configuración del atornillador. El valor está compuesto por 25 carac-teres ASCII.
ID 03 2
Rango de valores 0x20 – 0x7F
Preajuste ***, significa no existe nombre de con-trol
Ejemplo:
Nombre del control Canal de atornillado
Valor Canal de atornillado 25
Longitud de datos Revisión 001 37
Tabla 7–8: MID 002 Revisión 002
Parámetros Observación BytesEsta revisión contiene la información de revisión 001 y la información adicional expuesta a continuación:
Código de fabricante El valor está compuesto por tres caracteres ASCII.
ID 04 2
Valor fijo BRC 3
Longitud datos revisión 002 (= longitud datos revisión 001 + longitud datos revisión 002) 42
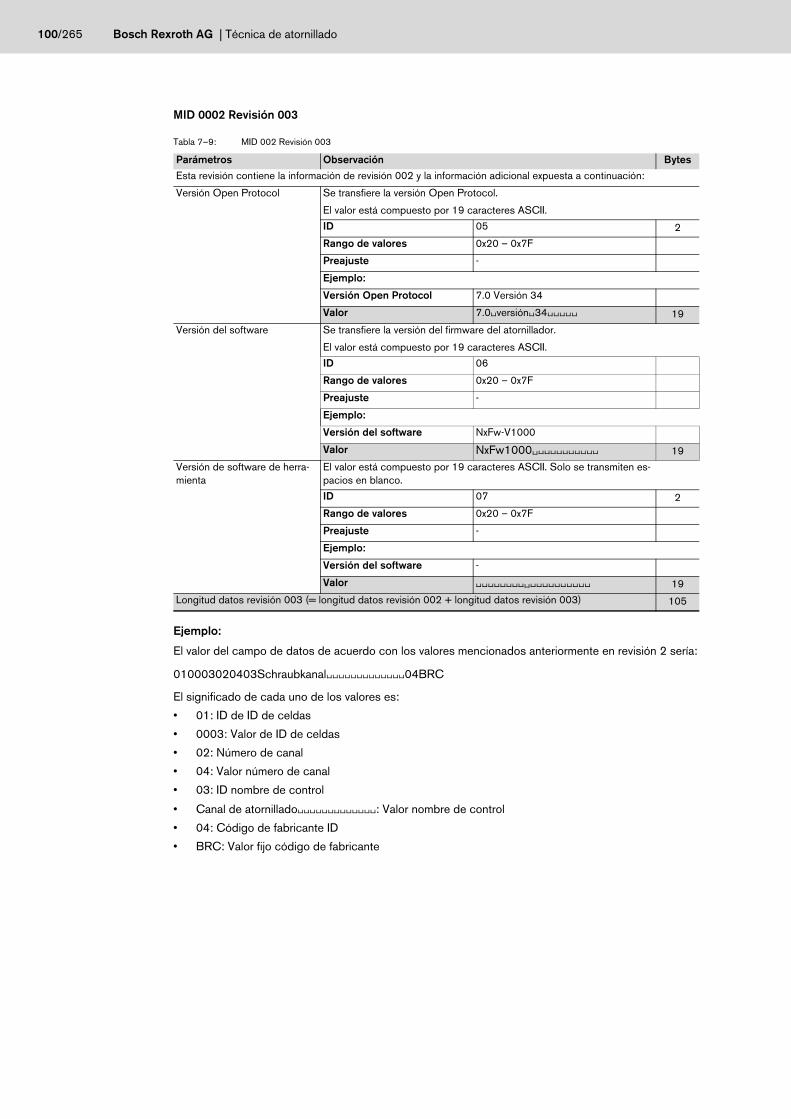
100/265 Bosch Rexroth AG | Técnica de atornillado
MID 0002 Revisión 003
Ejemplo:
El valor del campo de datos de acuerdo con los valores mencionados anteriormente en revisión 2 sería:
010003020403Schraubkanal 04BRC
El significado de cada uno de los valores es:
• 01: ID de ID de celdas
• 0003: Valor de ID de celdas
• 02: Número de canal
• 04: Valor número de canal
• 03: ID nombre de control
• Canal de atornillado : Valor nombre de control
• 04: Código de fabricante ID
• BRC: Valor fijo código de fabricante
Tabla 7–9: MID 002 Revisión 003
Parámetros Observación BytesEsta revisión contiene la información de revisión 002 y la información adicional expuesta a continuación:
Versión Open Protocol Se transfiere la versión Open Protocol.
El valor está compuesto por 19 caracteres ASCII.
ID 05 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Versión Open Protocol 7.0 Versión 34
Valor 7.0 versión 34 19
Versión del software Se transfiere la versión del firmware del atornillador.
El valor está compuesto por 19 caracteres ASCII.
ID 06
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Versión del software NxFw-V1000
Valor NxFw1000 19
Versión de software de herra-mienta
El valor está compuesto por 19 caracteres ASCII. Solo se transmiten es-pacios en blanco.
ID 07 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Versión del software -
Valor 19
Longitud datos revisión 003 (= longitud datos revisión 002 + longitud datos revisión 003) 105

Técnica de atornillado | Bosch Rexroth AG 101/265
MID 0003 Parada de comunicación
7.5.3.3 Responder solicitud
MID 0004 Error de comando
Ejemplo:
La solicitud seleccionar programa de atornillado (MID 0018) ha fallado, el número programa de atornilla-do no estaba disponible en la unidad de control de atornillado.
Enviado por: ordenador de rango superior
Finaliza la conexión de comando
Aviso: después de recibir este comando, la unidad de control de atornillado solo reacciona con el comando Inicio de comunicación (MID 0001).
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Enviado por: Unidad de control de atornillado
La unidad de control de atornillado utiliza este mensaje cuando por alguna razón no se ha podido llevar a cabo una solicitud.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 6 Bytes
Posible respuesta: ninguna
Tabla 7–10: MID 0004 Revisión 001
Parámetros Observación BytesMID MID de la solicitud que ha fallado
ID -
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:
MID 18
Valor 0018 4
Número de error Posibles números de error
ID -
Rango de valores 00 – 99
Preajuste -
Ejemplo:Número de error 2
Valor 02 2
Longitud de datos Revisión 001 6
MID 0018
N.º de error 02
Valor campo de datos 001802
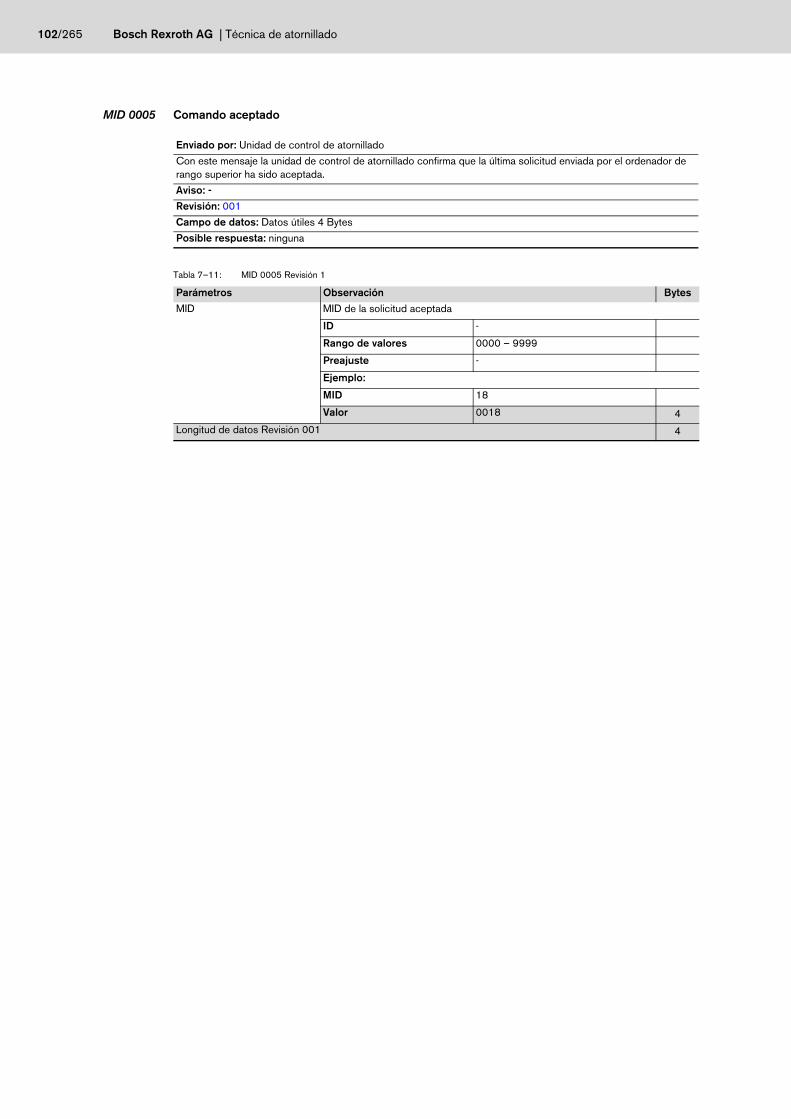
102/265 Bosch Rexroth AG | Técnica de atornillado
MID 0005 Comando aceptado
Enviado por: Unidad de control de atornillado
Con este mensaje la unidad de control de atornillado confirma que la última solicitud enviada por el ordenador de rango superior ha sido aceptada.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 4 Bytes
Posible respuesta: ninguna
Tabla 7–11: MID 0005 Revisión 1
Parámetros Observación BytesMID MID de la solicitud aceptada
ID -
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:
MID 18
Valor 0018 4
Longitud de datos Revisión 001 4

Técnica de atornillado | Bosch Rexroth AG 103/265
7.5.3.4 Mensajes de programa de atornillado
MID 0010 Solicitud upload programa de atornillado-números
MID 0011 Respuesta upload programa de atornillado-números
Ejemplo:
Dos programas de atornillado disponibles con los números 005 y 006:
Enviado por: ordenador de rango superior
Solicitud de todos los números disponibles del programa de atornillado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta upload programa de atornilla-do-números
0011 – Como resultado de este comando se transmiten to-dos los números válidos del programa de atornilla-do de la unidad de control.
Enviado por: Unidad de control de atornillado
Transmisión de todos los números disponibles del programa de atornillado de la unidad de control de atornillado.
Aviso: solo se envían los número de programa 0 ... 99 que estén disponibles.
Revisión: 001
Campo de datos:
Longitud de datos total = (1+ número programa de atornillado) x 3 Bytes
Posible respuesta: ninguna
Tabla 7–12: MID 0011 Revisión 001
Parámetros Observación BytesNúmero-programa de atornilla-do
El valor está compuesto por tres caracteres ASCII.
ID -
Rango de valores 000 – 999
Preajuste -
Ejemplo:
Número-programa de atorni-llado
1
Valor 001 3
Número de programa de atorni-llado
El valor está compuesto por tres caracteres ASCII.
ID -
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de programa de ator-nillado
2
Valor 002 3
Longitud de datos revisión 001 (en caso de un programa de atornillado) 6
Valor campo de datos 002005006

104/265 Bosch Rexroth AG | Técnica de atornillado
MID 0012 Solicitud upload programa de atornillado
MID 0013 Respuesta upload datos de programa de atornillado
MID 0013 Revisión 001
Enviado por: ordenador de rango superior
Solicitud para el upload de los parámetros del último paso de atornillado de un programa de atornillado.
Aviso: -Revisión: 001
Campo de datos: Número de programa de atornillado, 3 Bytes
Posibles respuestas MID N.º de error
Observación
Respuesta upload datos de programa de atornillado
0013 -
Error de comando 0004 02 Programa de atornillado no disponible
Enviado por: Unidad de control de atornillado
Se envían los parámetros del último paso de atornillado del programa de atornillado seleccionado al ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 84 Bytes
Posible respuesta: ninguna
Tabla 7–13: MID 0013 Revisión 001
Parámetros Observación BytesNúmero de programa de atorni-llado
El valor está compuesto por tres caracteres ASCII.
ID 01 2
Rango de valores 000 – 999
Preajuste -
Ejemplo:
ID de programa de atornillado 2
Valor 002 3
Nombre de programa de atorni-llado
Se muestra el nombre del programa. Rellenar con espacios vacíos cuando el nombre del programa de atornillado tenga < 25 caracteres.
El valor está compuesto por 25 caracteres ASCII.
ID 02 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Nombre de registro de pará-metros
prog1
Valor prog1 25
Sentido de giro – 1: Rotación a la derecha (CW)
– 2: Rotación a la izquierda (CCW)
El valor está compuesto por un carácter ASCII.
ID 03 2
Rango de valores 0 – 9
Preajuste -
Ejemplo:Sentido de giro Derecha (CW)
Valor 1 1
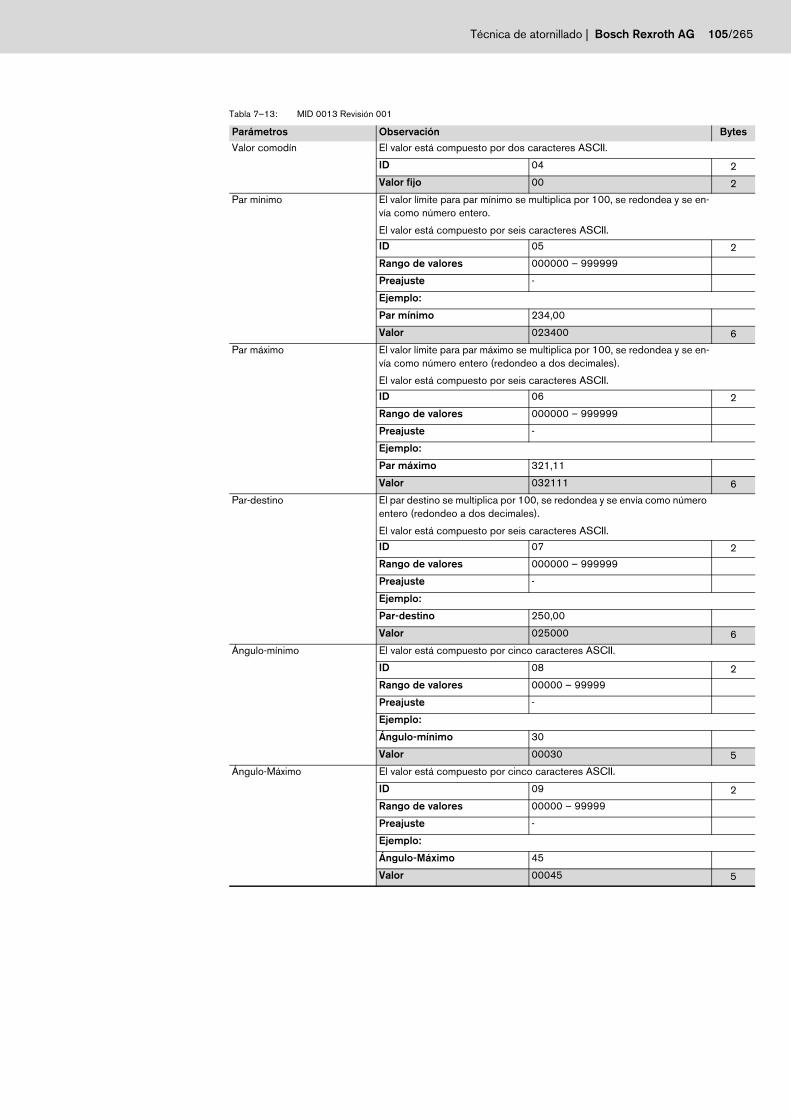
Técnica de atornillado | Bosch Rexroth AG 105/265
Valor comodín El valor está compuesto por dos caracteres ASCII.
ID 04 2
Valor fijo 00 2
Par mínimo El valor límite para par mínimo se multiplica por 100, se redondea y se en-vía como número entero.
El valor está compuesto por seis caracteres ASCII.
ID 05 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:
Par mínimo 234,00
Valor 023400 6
Par máximo El valor límite para par máximo se multiplica por 100, se redondea y se en-vía como número entero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 06 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:
Par máximo 321,11
Valor 032111 6
Par-destino El par destino se multiplica por 100, se redondea y se envía como número entero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 07 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:
Par-destino 250,00
Valor 025000 6
Ángulo-mínimo El valor está compuesto por cinco caracteres ASCII.
ID 08 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:
Ángulo-mínimo 30
Valor 00030 5
Ángulo-Máximo El valor está compuesto por cinco caracteres ASCII.
ID 09 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:
Ángulo-Máximo 45
Valor 00045 5
Tabla 7–13: MID 0013 Revisión 001
Parámetros Observación Bytes

106/265 Bosch Rexroth AG | Técnica de atornillado
MID 0014 Seleccionado suscripción programa de atornillado
MID 0015 Seleccionado programa de atornillado
MID 0015 Revisión 001
Ángulo-destino El ángulo destino se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 10 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:
Ángulo-destino 40
Valor 00040 5
Longitud de datos Revisión 001 84
Tabla 7–13: MID 0013 Revisión 001
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Cada vez que se seleccione un nuevo programa de atornillado se envía un mensaje (seleccionado programa de ator-nillado, MID 0015) al ordenador de rango superior. Además el mensaje se envía como una respuesta directa al men-saje de registro después de enviar la respuesta (comando aceptado, MID 0005).
Aviso: con cada cambio del programa de atornillado envía los datos correspondientes al control de rango superior.
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 13 Suscripción para programa de atornillado ya dispo-nible
Enviado por: Unidad de control de atornillado
En la unidad de control de atornillado se selecciona un nuevo programa de atornillado.
El mensaje contiene el número del último programa de atornillado seleccionado así como fecha/hora de la última mo-dificación en los ajustes del programa de atornillado. Además el mensaje se envía como una respuesta directa al registro para la selección de programa de atornillado (MID 0014).
Aviso: con cada cambio del programa de atornillado envía los datos correspondientes al control de rango superior.
Revisión: 001
Campo de datos: Datos útiles 22 Bytes
Posible respuesta MID N.º de error
Observación
Seleccionada confirmación programa de atornillado
0016 –
Tabla 7–14: MID 0015 Revisión 001
Parámetros Observación BytesNúmero de programa de atorni-llado
El valor está compuesto por tres caracteres ASCII.
ID -
Rango de valores 000 – 999
Preajuste
Ejemplo:
Número de programa de ator-nillado
2
Valor 002 3

Técnica de atornillado | Bosch Rexroth AG 107/265
MID 0016 Seleccionada confirmación programa de atornillado
MID 0017 Seleccionada anulación suscripción programa de atornillado
MID 0018 Seleccionar programa de atornillado
Fecha de la última modificación Indicación de fecha en formato AAAA-MM-DD:HH:MM:SS.
El valor está compuesto por 19 caracteres ASCII.
ID -
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:
Fecha de la última modifica-ción
2008-07-30:19:48:22
Valor 2008-07-30-19:48:22 19
Longitud de datos Revisión 001 22
Tabla 7–14: MID 0015 Revisión 001
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Confirmación para la selección de un nuevo programa de atornillado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna
Enviado por: ordenador de rango superior
Restablecimiento de la suscripción para el programa de atornillado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 14 La suscripción para la selección de programa de atornillado no está disponible
Enviado por: ordenador de rango superior
Seleccionar programa de atornillado
Aviso: las señales de selección del programa deben estar publicadas en la tabla de asignación BMS del módulo OP.
Revisión 001
Campo de datos: Número de programa de atornillado, 3 caracteres ASCII (000 – 999), 3 Bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 03 No se puede seleccionar el programa de atornillado

108/265 Bosch Rexroth AG | Técnica de atornillado
MID 0019 Establecer preajuste para el contador OK/NOK
MID 0019 Revisión 001
MID 0019 Revisión 002
Enviado por: ordenador de rango superior
Este mensaje establece el preajuste para el contador OK y de NOK del modo de funcionamiento Automático (pa-rámetro "Valor límite de contador OK") para el registro de contadores indicado en el comando (parámetro "Número de programa de atornillado").
Aviso: - Revisión: 001, 002
Campo de datos: Datos útiles 7 Bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 01 Datos no válidos
Tabla 7–15: MID 0019 Revisión 001
Parámetros Observación BytesNúmero de programa de atorni-llado
El valor está compuesto por 3 caracteres ASCII.
ID -
Rango de valores 000 – 999
Preajuste -
Ejemplo:
Número de programa de ator-nillado
3
Valor 003 3
Valor contador OK El valor está compuesto por 2 caracteres ASCII.
ID -
Rango de valores 00 – 99
Preajuste -
Ejemplo:Valor contador OK 9
Valor 09 2
Longitud de datos Revisión 001 5
Tabla 7–16: MID 0019 Revisión 002
Parámetros Observación Bytes
Esta revisión contiene la información de revisión 001 y la información adicional expuesta a continuación:
Valor contador NOK El valor está compuesto por 2 caracteres ASCII.
ID -
Rango de valores 00 – 99
Preajuste -
Ejemplo:Valor contador NOK 5
Valor 05 2
Longitud de datos Revisión 002 7
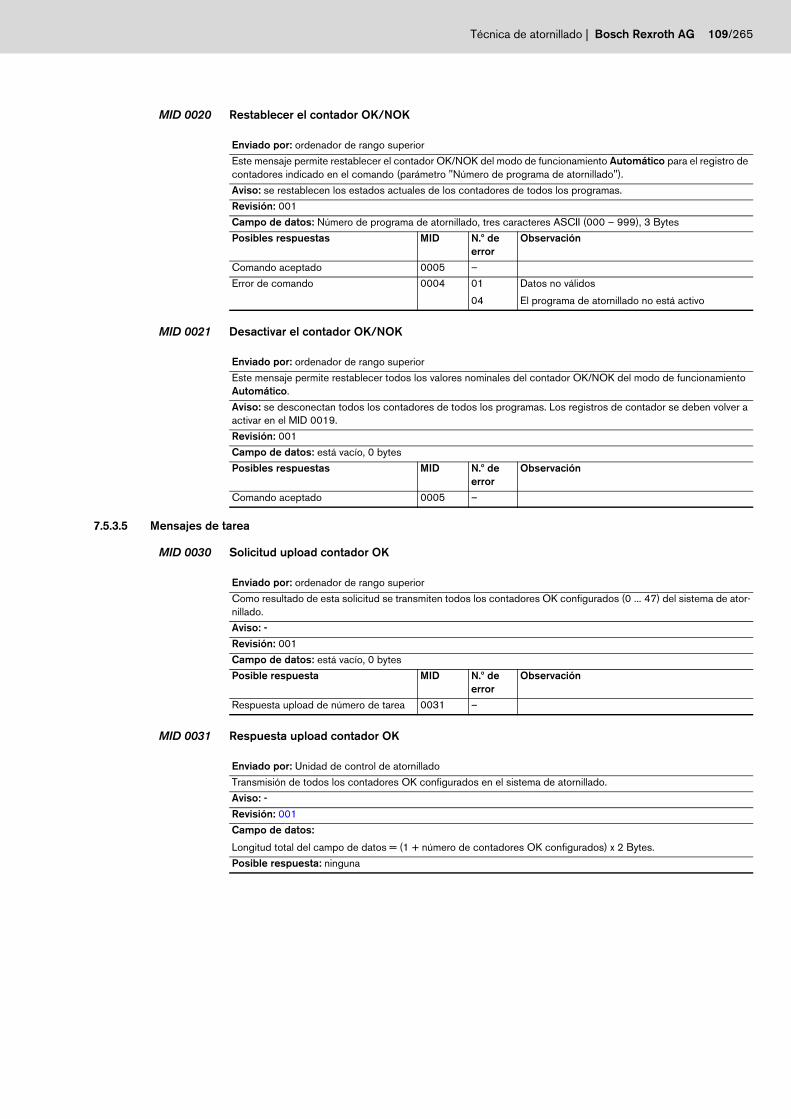
Técnica de atornillado | Bosch Rexroth AG 109/265
MID 0020 Restablecer el contador OK/NOK
MID 0021 Desactivar el contador OK/NOK
7.5.3.5 Mensajes de tarea
MID 0030 Solicitud upload contador OK
MID 0031 Respuesta upload contador OK
Enviado por: ordenador de rango superior
Este mensaje permite restablecer el contador OK/NOK del modo de funcionamiento Automático para el registro de contadores indicado en el comando (parámetro "Número de programa de atornillado").
Aviso: se restablecen los estados actuales de los contadores de todos los programas.
Revisión: 001
Campo de datos: Número de programa de atornillado, tres caracteres ASCII (000 – 999), 3 Bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 01
04
Datos no válidos
El programa de atornillado no está activo
Enviado por: ordenador de rango superior
Este mensaje permite restablecer todos los valores nominales del contador OK/NOK del modo de funcionamiento Automático.
Aviso: se desconectan todos los contadores de todos los programas. Los registros de contador se deben volver a activar en el MID 0019.
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Enviado por: ordenador de rango superior
Como resultado de esta solicitud se transmiten todos los contadores OK configurados (0 ... 47) del sistema de ator-nillado.
Aviso: - Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta upload de número de tarea 0031 –
Enviado por: Unidad de control de atornillado
Transmisión de todos los contadores OK configurados en el sistema de atornillado.
Aviso: -Revisión: 001
Campo de datos:
Longitud total del campo de datos = (1 + número de contadores OK configurados) x 2 Bytes.
Posible respuesta: ninguna

110/265 Bosch Rexroth AG | Técnica de atornillado
MID 0031 Revisión 001
7.5.3.6 Mensajes de herramienta
MID 0040 Solicitud upload datos de herramienta
MID 0041 Upload datos de herramienta
Tabla 7–17: MID 0031 Revisión 001
Parámetros Observación BytesNúmero de contadores OK configurados
El valor está compuesto por dos caracteres ASCII.
ID -
Rango de valores 00 – 99
Preajuste
Ejemplo:
Dos contadores OK configura-dos-
02
Valor 02 2
Número del contadores OK El valor está compuesto por dos caracteres ASCII.
ID -
Rango de valores 00 – 99
Preajuste -
Ejemplo:
Dos números de contadores OK
25 – 36
Valor 2536 4
Longitud de datos revisión 001 (en caso de un contador OK configurado) 6
Enviado por: ordenador de rango superior
Mediante esta función se puede acceder a los datos de las herramientas.
Aviso: -Revisión: véase MID 0041
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta upload datos de herramienta 0041 –
AVISO
Calidad estable de la herramientaEl cambio del factor MFU mediante el MID 0041 influye en la calidad de la herramienta. Para que la calidad de la herramienta se mantenga estable, se debe realizar un examen de la
capacidad de máquinas (MFU) tras cambiar el factor MFU mediante el MID 0041.
Enviado por: unidad de control de atornillado
Transmisión de los datos de herramientas
Aviso: -Revisión: 001, 002-1
Campo de datos: datos útiles 101 bytes
Posible respuesta: ninguna

Técnica de atornillado | Bosch Rexroth AG 111/265
MID 0041 Revisión 001
Tabla 7–18: MID 0041 Revisión 001
Parámetros Observación BytesNúmero de herramienta Número de serie
El valor está compuesto por 14 caracteres ASCII.
ID 01 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Número de herramienta A123456
Valor A123456 14
Ciclos Contador de ciclos
El valor está compuesto por diez caracteres ASCII.
ID 02 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Ciclos 5467
Valor 0000005467 10
Fecha del último mantenimiento El valor está compuesto por 19 caracteres ASCII: no tiene soporte.
ID 03 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:
Fecha del último manteni-miento
2009-01-12:14:43:57
Valor 19
Número de serie El valor está compuesto por diez caracteres ASCII: no tiene soporte.
ID 04
Rango de valores 0000000000 - 9999999999
Preajuste
Ejemplo:
Número de serie 476547
Valor 10
Longitud de datos Revisión 001 61

112/265 Bosch Rexroth AG | Técnica de atornillado
MID 0041 Revisión 002-1
Tabla 7–19: MID 0041 Revisión 002-1
Parámetros Observación Bytes
Esta revisión contiene la información de revisión 001 y la información adicional expuesta a continuación:
Factor MFU El factor MFU se multiplica por 1000, se redondea y se envía como núme-ro entero (redondeo a tres decimales).
El valor está compuesto por 4 caracteres ASCII.
ID 05 2
Rango de valores 500 - 2000
Ejemplo:
Factor MFU 1,0001
Valor 1000 4
Fecha de la última comproba-ción
Indicación de fecha en formato AAAA-MM-DD:HH:MM:SS.
El valor está compuesto por 19 caracteres ASCII.
ID 06 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:
Fecha de la última comproba-ción
2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Ciclos desde el mantenimiento Calculado con los ciclos durante el último mantenimiento y el número ac-tual de ciclos
El valor está compuesto por diez caracteres ASCII.
ID 07 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:
Ciclos desde el manteni-miento
123412
Valor 0000123412 10
Tipo de herramienta El valor está compuesto por dos caracteres ASCII.
ID 08 2
Rango de valores 00 – 99
Valor Nexo: 05 2
Tamaño del motor Valor fijo 01
El valor está compuesto por dos caracteres ASCII.
ID 09 2
Rango de valores 00 – 99
Preajuste -
Ejemplo (husillo atornillador):
Tamaño del motor 03
Valor 03 2
Open end data El valor está compuesto por tres caracteres ASCII.
ID 10 2
Valor fijo 000 3

Técnica de atornillado | Bosch Rexroth AG 113/265
MID 0042 Desactivar herramienta
MID 0043 Activar herramienta
Versión del software Versión del firmware del atornillador.
El valor está compuesto por 19 caracteres ASCII.
ID 11 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Versión del software NxFw-V1000
Valor NxFw1000 19
Longitud datos revisión 002 (= longitud datos revisión 001 + longitud datos revisión 002) 136
Tabla 7–19: MID 0041 Revisión 002-1
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Con este comando se puede bloquear el atornillador.
Aviso:
La señal de habilitado debe estar colocada en la tabla de asignación BMS en el módulo OP (véase párrafo Señales BMS a partir de la página 74). La señal de habilitado tabla de asignación debe estar colocada en la tabla de asigna-ción BMS en Bit 1.0 del módulo BMS OP.
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 -
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.
Enviado por: ordenador de rango superior
Con este comando se puede desbloquear el atornillador.
Aviso:
La señal de habilitado debe estar colocada en la tabla de asignación BMS en el módulo OP (véase párrafo Señales BMS a partir de la página 74). La señal de habilitado tabla de asignación debe estar colocada en la tabla de asigna-ción BMS en Bit 1.0 del módulo BMS OP.
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 -
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.

114/265 Bosch Rexroth AG | Técnica de atornillado
MID 0045 Solicitud establecer valor de calibrado
7.5.3.7 Mensajes de código ID
MID 0050 Solicitud de descarga de código ID
Enviado por: ordenador de rango superior
Solicitud valor de calibrado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 70 El calibrado ha fallado
Tabla 7–20: MID 0045 Revisión 001
Parámetros Observación BytesUnidad valor de calibrado – 0: ninguna unidad
El valor está compuesto por un carácter ASCII.
ID 01 2
Rango de valores 0 – 4
Preajuste -
Valor fijo 0 1
Valor de calibrado El valor se multiplica por 1000, se redondea y se envía como número en-tero (redondeo a tres decimales).
El valor está compuesto por seis caracteres ASCII.
ID 02 2
Rango de valores 500 – 2000
Preajuste -
Ejemplo:
Valor de calibrado 1,345
Valor 001345 6
Longitud de datos Revisión 001 11
Aún tiene soporte pero en caso de una implementación nueva, debería utilizarse el MID 0150.
Enviado por: ordenador de rango superior
Es utilizado por el ordenador de rango superior para enviar un código ID a la unidad de control de atornillado.
Aviso:
OP debe estar configurado como código ID de la fuente.
Revisión: 001
Campo de datos: Código ID máximo 25 caracteres ASCII (25 Bytes). Si el código ID tiene menos de 25 caracteres, el campo de rellena con espacios en blanco.
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando: 0004 08 La fuente de entrada para el código ID no está per-mitida

Técnica de atornillado | Bosch Rexroth AG 115/265
MID 0150 Solicitud descarga código ID-
MID 0051 Suscripción upload código ID
MID 0052 Upload código ID
Enviado por: ordenador de rango superior
Es utilizado por el ordenador de rango superior para enviar un código ID a la unidad de control de atornillado.
Aviso:
OP debe estar configurado como código ID de la fuente.
Revisión: 001
Campo de datos: Código ID máximo 100 caracteres ASCII (100 bytes). Si el código ID tiene menos de 100 carac-teres, el campo de rellena con espacios en blanco.
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 01
08
Datos no válidos
La fuente de entrada para el código ID no está per-mitida
Enviado por: ordenador de rango superior
Con este mensaje el control de rango superior envía una suscripción para el código ID actual.
Aviso: -Revisión: véase MID 0052
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 06 El registro para upload de ID de código ya está dis-ponible
Enviado por: Unidad de control de atornillado
Transmisión del código ID actual
Aviso: cuando la opción Transferencia de códigos ID-también de fuentes no seleccionadas está activada, me-diante este mensaje también se transmiten aquellos códigos ID-que no son códigos ID activos-.
Revisión: 001, 002
Campo de datos: datos útiles 25 bytes (Revisión 001), 108 bytes (Revisión 002)
El envío automático de un código ID recibido por el control solo tiene soporte con los aparatos con el siguiente có-digo ID:
– FTP
– Open Protocol
Posible respuesta MID N.º de error
Observación
Confirmación upload código ID 0053 –

116/265 Bosch Rexroth AG | Técnica de atornillado
MID 0052 Revisión 001
MID 0052 Revisión 002
Tabla 7–21: MID 0052 Revisión 001
Parámetros Observación BytesParte 1 código ID Contiene los primeros 25 caracteres del código ID (ASCII).
El valor está compuesto por 25 caracteres ASCII.
ID -
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 1 código ID 1234512345123451234512345
Valor 1234512345123451234512345 25
Longitud de datos Revisión 001 25
Tabla 7–22: MID 0052 Revisión 002
Parámetros Observación BytesParte 1 código ID Contiene los primeros 25 caracteres del código ID (ASCII).
El valor está compuesto por 25 caracteres ASCII.
ID 01 02
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Parte 1 código ID 1234512345123451234512345
Valor 1234512345123451234512345 25
Parte 2 código ID Contiene los caracteres 26 – 50 del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 02 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 2 código ID 5432154321543215432154321
Valor 5432154321543215432154321 25
Parte 3 código ID Contiene los caracteres 51 – 64 del código ID. El resto de los caracteres se rellenan con espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 03 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 3 código ID 11112222333344
Valor 11112222333344 25
Parte 4 código ID Solo contiene espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 04 2
Rango de valores
Preajuste -
Ejemplo:Parte 4 código ID
Valor 25
Longitud datos revisión 002 (= longitud datos revisión 001 + longitud datos revisión 002) 108

Técnica de atornillado | Bosch Rexroth AG 117/265
MID 0053 Confirmación upload código ID
MID 0054 Dar de baja la suscripción upload código ID
7.5.3.8 Mensajes de resultados de atornillado
MID 0060 Suscripción a los últimos datos de resultados de atornillado
MID 0061 Respuesta upload datos de resultados de atornillado
Enviado por: ordenador de rango superior
Confirmación upload código ID
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna
Enviado por: ordenador de rango superior
Restablecimiento de la suscripción para el código ID que es recibido por la unidad de control de atornillado.
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 07 El registro para upload de código ID no está dispo-nible
Enviado por: ordenador de rango superior
Suscripción de los datos de resultados de atornillado
Aviso: -Revisión: véase MID 0061
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 09 El registro para el último resultado de atornillado ya está disponible
Enviado por: unidad de control de atornillado
Respuesta upload datos de resultados de atornillado
Aviso: Revisión 999 es adecuado para un ordenador de rango superior con capacidad de recepción limitada (sin memoria de recepción). Para limitar el tamaño de MID 0061 lo máximo posible, se eliminaron los ID de parámetros que normalmente se envían en el mensaje.
Revisión: 001, 002, 003, 004, 005, 999
Campo de datos: datos útiles 211 bytes (Revisión 001), 365 bytes (Revisión 002), 399 bytes (Revisión 003), 480 bytes (Revisión 004), 101 bytes (Revisión 999)
Posible respuesta MID N.º de error
Observación
Confirmación últimos datos de resulta-dos de atornillado
0062 –

118/265 Bosch Rexroth AG | Técnica de atornillado
MID 0061 Revisión 001
Tabla 7–23: MID 0061 Revisión 001
Parámetros Observación BytesID de celdas Aquí se el 7. Devolver la denominación del lugar
El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:ID de celdas 21
Valor 0021 4
ID de canal Se utilizan las dos primeras posiciones de un nombre de canal como ID de canal. Un nombre de canal está compuesto por el ID de canal y el nombre del control, los dos están separados por un espacio en blanco.
El valor está compuesto por dos caracteres ASCII.
ID 02 2
Rango de valores 01 – 20
Preajuste 01
Ejemplo:ID de canal 04 canal de atornillado
Valor 04 2
Nombre del control Como nombre de control se utiliza la segunda parte del nombre de canal.
El valor está compuesto por 25 caracteres ASCII.
ID 03 2
Rango de valores 0x20 – 0x7F
Preajuste ***
Ejemplo:Nombre del con-trol
04 canal de atornillado
Valor Canal de atornillado 25
Código ID Contiene los primeros 25 Bytes del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 04 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Código ID 123456
Valor 123456 25
Número de tarea Número del contador OK/NOK seleccionado
El valor está compuesto por dos caracteres ASCII.
ID 05 2
Rango de valores 01 – 99
Preajuste -
Ejemplo:Número de tarea 2
Valor 02 2

Técnica de atornillado | Bosch Rexroth AG 119/265
Número de programa de atorni-llado
Número del programa de atornillado actual
El valor está compuesto por tres caracteres ASCII.
ID 06 2
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de pro-grama de atorni-llado
5
Valor 005 3
Valor límite contador OK Preajuste del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 07 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor límite con-tador OK
12
Valor 0012 4
Valor contador OK Valor real del contador OKEl valor está compuesto por cuatro caracteres ASCII.ID 08 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor contador OK
4
Valor 0004 4
Estado de atornillado – 0: NOK
– 1: OK
El valor está compuesto por un carácter ASCII.
ID 09 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado de atorni-llado
OK
Valor 1 1
Estado par de apriete – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 10 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado par de apriete
High
Valor 2 1
Tabla 7–23: MID 0061 Revisión 001
Parámetros Observación Bytes

120/265 Bosch Rexroth AG | Técnica de atornillado
Estado del ángulo – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 11 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado del ángulo
OK
Valor 1 1
Límite par mínimo (M-) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 12 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Límite par mínimo (M-)
12,13
Valor 001213 6
Límite par máximo (M+) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 13 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Límite par máximo (M+)
20,00
Valor 002000 6
Par-destino (MP) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 14 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par-destino (MP) 23,00
Valor 002300 6
Par (M) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 15 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par (M) 20,50
Valor 002050 6
Tabla 7–23: MID 0061 Revisión 001
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 121/265
Ángulo-mínimo (W-) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 16 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:ÁnguloMínimo (W-)
5
Valor 00005 5
Ángulo-Máximo (W+) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 17 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:ÁnguloMáximo (W+)
450
Valor 00450 5
Ángulo-destino (WP) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 18 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo-destino (WP)
90
Valor 00090 5
Ángulo (W) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 19 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo (W) 60
Valor 00060 5
Sello de fecha Fecha y hora del atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 20 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Sello de fecha 2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Tabla 7–23: MID 0061 Revisión 001
Parámetros Observación Bytes

122/265 Bosch Rexroth AG | Técnica de atornillado
MID 0061 Revisión 002
Fecha/hora de la última modifi-cación
Fecha y hora de la última modificación en los ajustes del programa de atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 21 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Fecha/hora de la modificación
2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Estado contador OK/NOK Estado del contador OK/NOK.
– 0: cuando no es 1 ó 2
– 1: Ch x.y CntOK = 1
– 2: Contador OK/NOK no utilizado (no configurado)
El valor está compuesto por un carácter ASCII.
ID 22 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado contador OK/NOK
Contador OK/NOK no utilizado
Valor 2 1
ID de tornillo Número consecutivo al activar OP para cada resultado de atornillado (ver más información en MID 0064).
El valor está compuesto por diez caracteres ASCII.
ID 23 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:ID de tornillo 123456
Valor 0000123456 10
Longitud de datos Revisión 001 211
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación BytesID de celdas Aquí se el 7. Devolver la denominación del lugar
El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:ID de celdas 21
Valor 0021 4
Tabla 7–23: MID 0061 Revisión 001
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 123/265
ID de canal Se utilizan las dos primeras posiciones de un nombre de canal como ID de canal. Un nombre de canal está compuesto por el ID de canal y el nombre del control, los dos están separados por un espacio en blanco.
El valor está compuesto por dos caracteres ASCII.
ID 02 2
Rango de valores 01 – 20
Preajuste 01
Ejemplo:ID de canal 04 canal de atornillado
Valor 04 2
Nombre del control Como nombre de control se utiliza la segunda parte del nombre de canal.
El valor está compuesto por 25 caracteres ASCII.
ID 03 2
Rango de valores 0x20 – 0x7F
Preajuste ***
Ejemplo:Nombre del con-trol
04 canal de atornillado
Valor Canal de atornillado 25
Código ID Contiene los primeros 25 Bytes del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 04 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Código ID 123456
Valor 123456 25
Número de tarea Número del contador OK/NOK seleccionado
El valor está compuesto por cuatro caracteres ASCII.
ID 05 2
Rango de valores 0001 – 9999
Preajuste -
Ejemplo:Número de tarea 2
Valor 0002 4
Número de programa de atorni-llado
Número del programa de atornillado actual
El valor está compuesto por tres caracteres ASCII.
ID 06 2
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de pro-grama de atorni-llado
5
Valor 005 3
Valor comodín El valor está compuesto por dos caracteres ASCII.
ID 07 2
Valor fijo 99 2
Valor comodín El valor está compuesto por cinco caracteres ASCII.
ID 08 2
Valor fijo 00000 5
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes
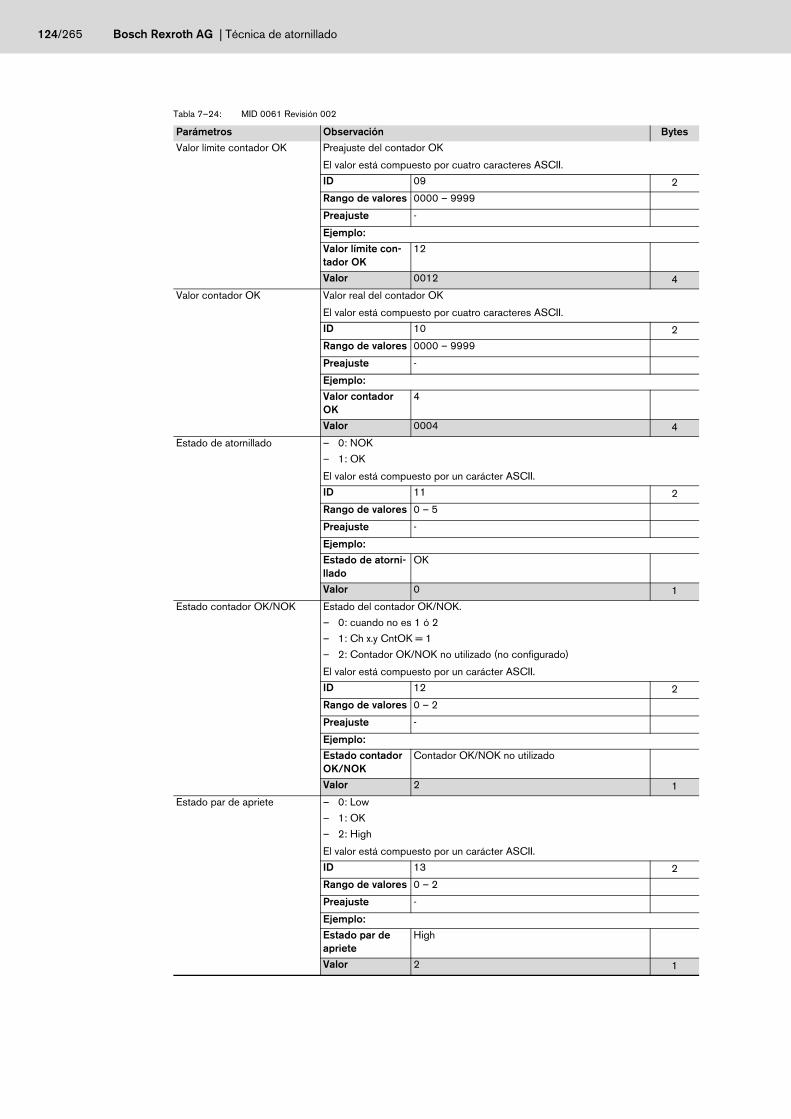
124/265 Bosch Rexroth AG | Técnica de atornillado
Valor límite contador OK Preajuste del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 09 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor límite con-tador OK
12
Valor 0012 4
Valor contador OK Valor real del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 10 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor contador OK
4
Valor 0004 4
Estado de atornillado – 0: NOK
– 1: OK
El valor está compuesto por un carácter ASCII.
ID 11 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado de atorni-llado
OK
Valor 0 1
Estado contador OK/NOK Estado del contador OK/NOK.
– 0: cuando no es 1 ó 2
– 1: Ch x.y CntOK = 1
– 2: Contador OK/NOK no utilizado (no configurado)
El valor está compuesto por un carácter ASCII.
ID 12 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado contador OK/NOK
Contador OK/NOK no utilizado
Valor 2 1
Estado par de apriete – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 13 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado par de apriete
High
Valor 2 1
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes
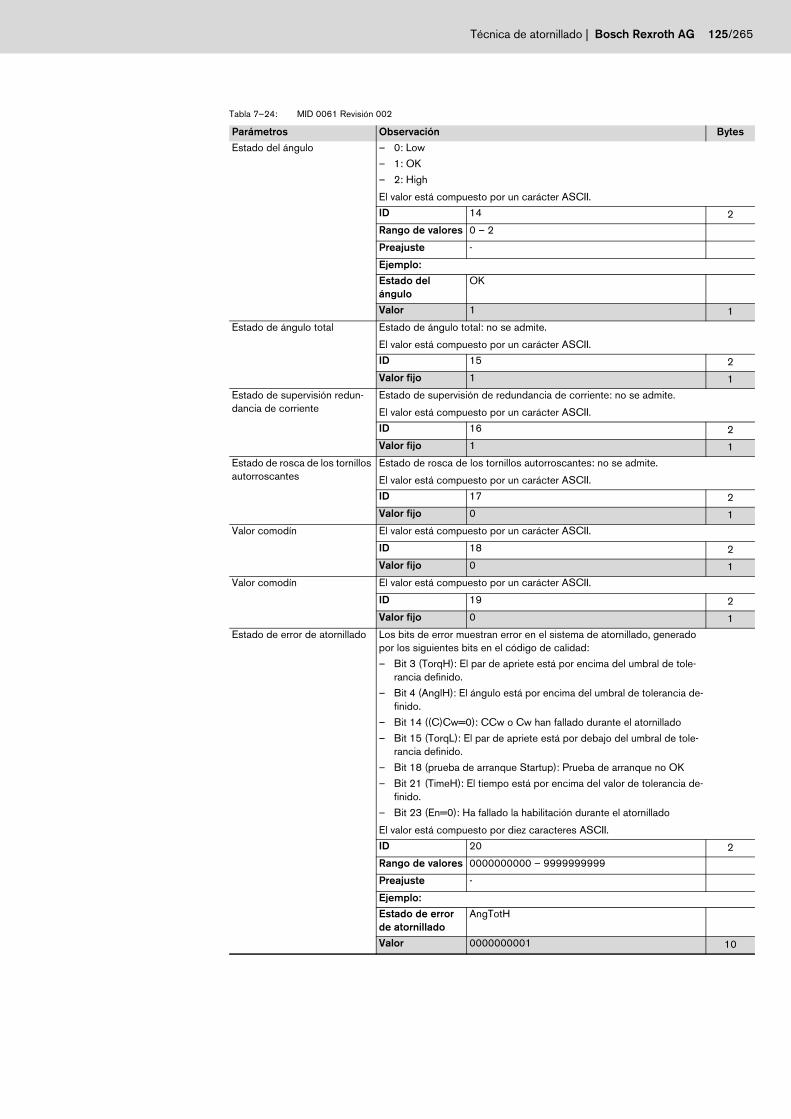
Técnica de atornillado | Bosch Rexroth AG 125/265
Estado del ángulo – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 14 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado del ángulo
OK
Valor 1 1
Estado de ángulo total Estado de ángulo total: no se admite.
El valor está compuesto por un carácter ASCII.
ID 15 2
Valor fijo 1 1
Estado de supervisión redun-dancia de corriente
Estado de supervisión de redundancia de corriente: no se admite.
El valor está compuesto por un carácter ASCII.
ID 16 2
Valor fijo 1 1
Estado de rosca de los tornillos autorroscantes
Estado de rosca de los tornillos autorroscantes: no se admite.
El valor está compuesto por un carácter ASCII.
ID 17 2
Valor fijo 0 1
Valor comodín El valor está compuesto por un carácter ASCII.
ID 18 2
Valor fijo 0 1
Valor comodín El valor está compuesto por un carácter ASCII.
ID 19 2
Valor fijo 0 1
Estado de error de atornillado Los bits de error muestran error en el sistema de atornillado, generado por los siguientes bits en el código de calidad:
– Bit 3 (TorqH): El par de apriete está por encima del umbral de tole-rancia definido.
– Bit 4 (AnglH): El ángulo está por encima del umbral de tolerancia de-finido.
– Bit 14 ((C)Cw=0): CCw o Cw han fallado durante el atornillado
– Bit 15 (TorqL): El par de apriete está por debajo del umbral de tole-rancia definido.
– Bit 18 (prueba de arranque Startup): Prueba de arranque no OK
– Bit 21 (TimeH): El tiempo está por encima del valor de tolerancia de-finido.
– Bit 23 (En=0): Ha fallado la habilitación durante el atornillado
El valor está compuesto por diez caracteres ASCII.
ID 20 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:Estado de error de atornillado
AngTotH
Valor 0000000001 10
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes

126/265 Bosch Rexroth AG | Técnica de atornillado
Límite par mínimo (M-) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 21 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Límite par mínimo (M-)
12,00
Valor 001200 6
Límite par máximo (M+) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 22 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Límite par máximo (M+)
20,11
Valor 002011 6
Par-destino (MP) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 23 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par-destino (MP) 23,40
Valor 002340 6
Par (M) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 24 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par (M) 20,03
Valor 002003 6
Ángulo-mínimo (W-) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 25 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo-mínimo (W-)
5
Valor 00005 5
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 127/265
Ángulo-Máximo (W+) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 26 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo-Máximo (W+)
45
Valor 00045 5
Ángulo-destino (WP) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 27 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo-destino (WP)
90
Valor 00090 5
Ángulo (W) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 28 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo (W) 60
Valor 00060 5
Ángulo total (WG-) Ángulo total (WG-): no se admite.
El valor está compuesto por cinco caracteres ASCII.
ID 29 2
Valor fijo 00000 5
Ángulo total (WG+) Ángulo total (WG+): no se admite.
El valor está compuesto por cinco caracteres ASCII.
ID 30 2
Valor fijo 00000 5
Ángulo total (WG) Ángulo total (WG): no se admite.
El valor está compuesto por cinco caracteres ASCII.
ID 31 2
Valor fijo 00000 5
Redundancia de corriente Su-pervisión mín.
Redundancia de corriente Supervisión máx.: no tiene soporte.
El valor está compuesto por tres caracteres ASCII.
ID 32 2
Valor fijo 000 3
Redundancia de corriente Su-pervisión máx.
Redundancia de corriente Supervisión máx.: no tiene soporte.
El valor está compuesto por tres caracteres ASCII.
ID 33 2
Valor fijo 000 3
Redundancia de corriente Valor de redundancia de corriente: no se admite.
El valor está compuesto por tres caracteres ASCII.
ID 34 2
Valor fijo 000 3
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes
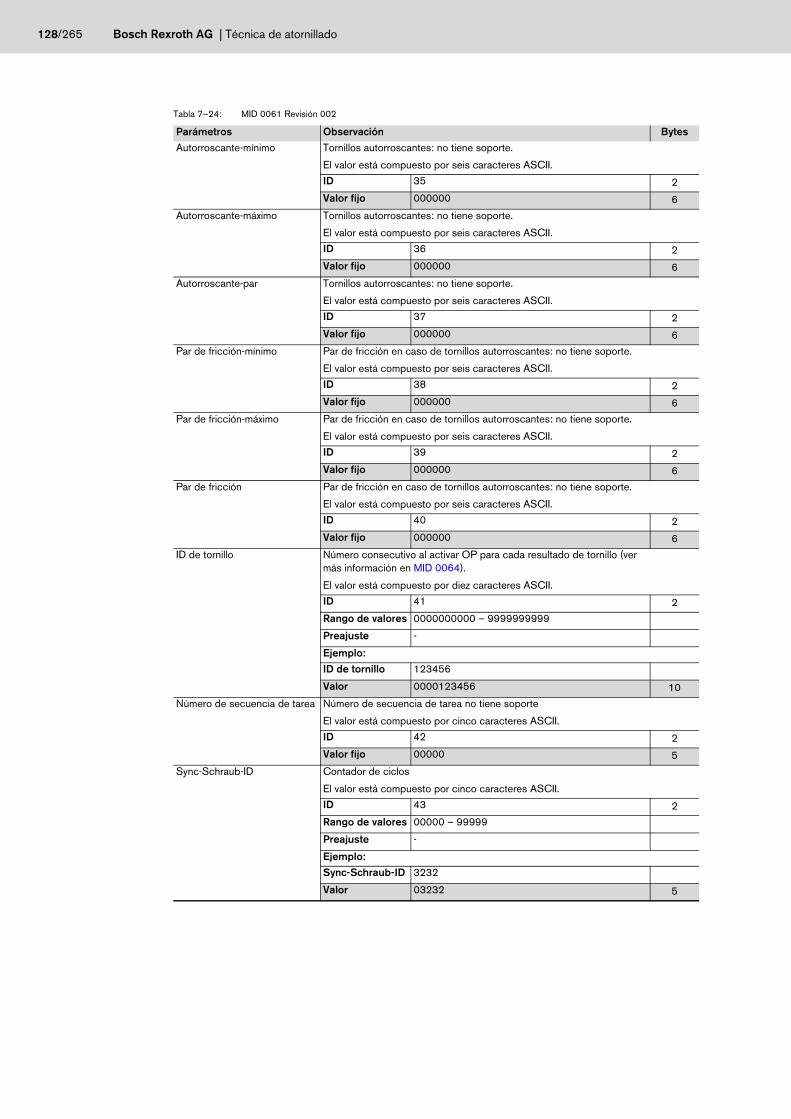
128/265 Bosch Rexroth AG | Técnica de atornillado
Autorroscante-mínimo Tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 35 2
Valor fijo 000000 6
Autorroscante-máximo Tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 36 2
Valor fijo 000000 6
Autorroscante-par Tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 37 2
Valor fijo 000000 6
Par de fricción-mínimo Par de fricción en caso de tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 38 2
Valor fijo 000000 6
Par de fricción-máximo Par de fricción en caso de tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 39 2
Valor fijo 000000 6
Par de fricción Par de fricción en caso de tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 40 2
Valor fijo 000000 6
ID de tornillo Número consecutivo al activar OP para cada resultado de tornillo (ver más información en MID 0064).
El valor está compuesto por diez caracteres ASCII.
ID 41 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:ID de tornillo 123456
Valor 0000123456 10
Número de secuencia de tarea Número de secuencia de tarea no tiene soporte
El valor está compuesto por cinco caracteres ASCII.
ID 42 2
Valor fijo 00000 5
Sync-Schraub-ID Contador de ciclos
El valor está compuesto por cinco caracteres ASCII.
ID 43 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Sync-Schraub-ID 3232
Valor 03232 5
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 129/265
Número de serie Atornillador
El valor está compuesto por 14 caracteres ASCII.
ID 44 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Número de serie A36363
Valor A36363 14
Sello de fecha Fecha y hora del atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 45 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Sello de fecha 2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Fecha/hora de la última modifi-cación
Fecha y hora de la última modificación en los ajustes del programa de atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 46 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Fecha/hora de la modificación
2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Longitud de datos Revisión 002 365
Tabla 7–24: MID 0061 Revisión 002
Parámetros Observación Bytes

130/265 Bosch Rexroth AG | Técnica de atornillado
MID 0061 Revisión 003
MID 0061 Revisión 004
Tabla 7–25: MID 0061 Revisión 003
Parámetros Observación BytesEsta revisión contiene la información de revisión 002 y la información adicional expuesta a continuación:
Nombre de programa de atorni-llado
Rellenar con espacios vacíos cuando tenga < 25 caracteres.
El valor está compuesto por 25 caracteres ASCII.
ID 47 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:
Nombre de pro-grama de atorni-llado
Programa de atornillado3
Valor Programa de atornillado3 25
Unidad valores de par – 1: Nm
– 2: Ftlb
– 3: Inlb
– 4: Kpm
– 5: Kgfm
– 6: Kgm
– 0: el resto de unidades
El valor está compuesto por un carácter ASCII.
ID 48 2
Rango de valores 0 – 4
Preajuste -
Ejemplo:Unidad valores de par
Nm
Valor 1 1
Tipo de resultado – 1: Atornillado (programa 0 … 98)
– 2: Desatornillar (programa 99)
El valor está compuesto por dos caracteres ASCII.
ID 49 2
Rango de valores 01 – 02
Preajuste -
Ejemplo:Tipo de resultado Programa 99
Valor 02 2
Longitud datos revisión 003 (= longitud datos revisión 003 + longitud datos revisión 002) 399
Tabla 7–26: MID 0061 Revisión 004
Parámetros Observación BytesEsta revisión contiene la información de revisión 003 y la información adicional expuesta a continuación:
Parte 2 código ID Contiene los caracteres 26 – 50 del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 50 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 2 código ID 5432154321543215432154321
Valor 5432154321543215432154321 25

Técnica de atornillado | Bosch Rexroth AG 131/265
MID 0061 Revisión 005
MID 0061 Revisión 999
Parte 3 código ID Contiene los caracteres 51 – 75 del código ID. El resto de los caracteres se rellenan con espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 51 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 3 código ID 11112222333344
Valor 11112222333344 25
Parte 4 código ID Contiene los caracteres 76 – 100 del código ID. El resto de los caracte-res se rellenan con espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 52 2
Rango de valores
Preajuste -
Ejemplo:Parte 4 código ID 1122334455
Valor 1122334455 25
Longitud datos revisión 004 (= longitud datos revisión 004 + longitud datos revisión 003) 480
Tabla 7–27: MID 0061 Revisión 005
Parámetros Observación BytesEsta revisión contiene la información de revisión 004 y la información adicional expuesta a continuación:
Código de error de atornillado de cliente
Contienen el código de error, que le ha aparecido al cliente durante el atornillado.
El valor está compuesto por cuatro caracteres ASCII (siempre: "0000").
ID 53 2
Rango de valores 0000
Preajuste 0000
Ejemplo:Parte 2 código ID 0000
Valor 0000 4
Longitud datos revisión 005 (= longitud datos revisión 005 + longitud datos revisión 004) 486
Tabla 7–28: MID 0061 Revisión 999
Parámetros Observación BytesCódigo ID Contiene los primeros 25 Bytes del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID -
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Código ID 123456
Valor 123456 25
Tabla 7–26: MID 0061 Revisión 004
Parámetros Observación Bytes

132/265 Bosch Rexroth AG | Técnica de atornillado
Número de tarea Número del contador OK/NOK seleccionado
El número de tarea está compuesto por dos caracteres ASCII.
ID -
Rango de valores 01 – 99
Preajuste -
Ejemplo:Número de tarea 2
Valor 02 2
Número de programa de atorni-llado
Número del programa de atornillado actual
El valor está compuesto por tres caracteres ASCII.
ID -
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de pro-grama de atorni-llado
5
Valor 005 3
Valor límite contador OK Preajuste del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID -
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor límite con-tador OK
12
Valor 0012 4
Valor contador OK – Inicio como canal independiente: Valor real del contador OK
– Inicio en una aplicación: Valor fijo 1
El valor está compuesto por cuatro caracteres ASCII.
ID -
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor contador OK
4
Valor 0004 4
Estado contador OK/NOK Estado del contador OK/NOK.
– 0: cuando no es 1 ó 2
– 1: Ch x.y CntOK = 1
– 2: Contador OK/NOK no utilizado (no configurado)
El valor está compuesto por un carácter ASCII.
ID -
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado contador OK/NOK
Contador OK/NOK no utilizado
Valor 2 1
Tabla 7–28: MID 0061 Revisión 999
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 133/265
Estado de atornillado – 0: NOK
– 1: OK
El valor está compuesto por un carácter ASCII.
ID - -
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado de atorni-llado
OK
Valor 0 1
Estado par de apriete – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID -
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado par de apriete
High
Valor 2 1
Estado del ángulo – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID -
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado del ángulo
OK
Valor 1 1
Par (M) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID -
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par (M) 20,00
Valor 002000 6
Ángulo (W) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID -
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo (W) 60
Valor 00060 5
Tabla 7–28: MID 0061 Revisión 999
Parámetros Observación Bytes

134/265 Bosch Rexroth AG | Técnica de atornillado
MID 0062 Confirmación últimos datos de resultados de atornillado
Sello de fecha Fecha y hora del atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID -
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Sello de fecha 2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Fecha/hora de la última modifi-cación
Fecha y hora de la última modificación en los ajustes del programa de atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID -
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Fecha/hora de la modificación
2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
ID de tornillo Número consecutivo al activar OP para cada resultado de tornillo (ver más información en MID 0064).
El valor está compuesto por diez caracteres ASCII.
ID -
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:ID de tornillo 123456
Valor 0000123456 10
Longitud de datos Revisión 999 101
Tabla 7–28: MID 0061 Revisión 999
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Confirmación últimos datos de resultados de atornillado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna

Técnica de atornillado | Bosch Rexroth AG 135/265
MID 0063 Dar de baja últimos datos de resultados de atornillado
MID 0064 Solicitud de upload resultado de atornillado archivado
MID 0065 Respuesta resultado de atornillado archivado
MID 0065 Revisión 001
Enviado por: ordenador de rango superior
Restablecimiento de la suscripción para el último resultado de atornillado
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 10 El registro para el último resultado de atornillado no está disponible
Enviado por: ordenador de rango superior
A cada resultado de atornillado se le asigna un ID consecutivo (empezando por 1). La carga del resultado actualmen-te disponible se produce con el ID de atornillado 0. Así, el último resultado de atornillado se puede solicitar, por ejem-plo, al inicio de una conexión.
Aviso: -Revisión: véase MID 0065
Campo de datos: ID de tornillo, 10 bytes
Posibles respuestas MID N.º de error
Observación
Respuesta resultado de atornillado archi-vado
0065 –
Error de comando 0004 15 No se ha encontrado el ID de tornillo solicitado
Enviado por: Unidad de control de atornillado
Upload del atornillado archivado.
Aviso: -Revisión: 001, 002, 003, 004
Campo de datos: Datos útiles 98 Bytes (Revisión 001), 206 Bytes (Revisión 002), 213 Bytes (Revisión 003), 294 Bytes (Revisión 004)
Posible respuesta: ninguna
Tabla 7–29: MID 0065 Revisión 001
Parámetros Observación BytesID de tornillo Número consecutivo al activar OP para cada resultado de tornillo.
El valor está compuesto por diez caracteres ASCII.
ID 01 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:ID de tornillo 123456
Valor 0000123456 10

136/265 Bosch Rexroth AG | Técnica de atornillado
Código ID Contiene los primeros 25 Bytes del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 02 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Código ID 123456
Valor 123456 25
Número de programa de atorni-llado
Número del programa de atornillado actual
El valor está compuesto por tres caracteres ASCII.
ID 03 2
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de pro-grama de atorni-llado
5
Valor 005 3
Valor contador OK Valor real del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 04 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor contador OK
4
Valor 0004 4
Estado de atornillado – 0: NOK
– 1: OK
El valor está compuesto por un carácter ASCII.
ID 05 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado de atorni-llado
OK
Valor 0 1
Estado par de apriete – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 06 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado par de apriete
High
Valor 2 1
Tabla 7–29: MID 0065 Revisión 001
Parámetros Observación Bytes
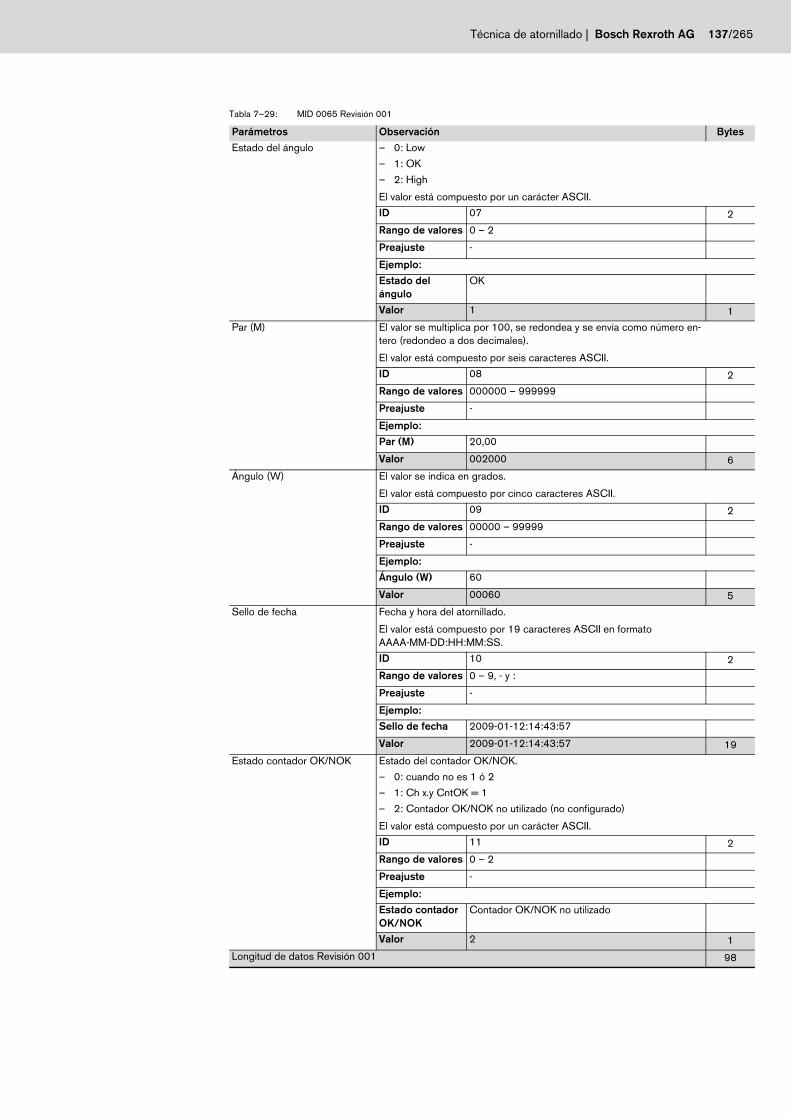
Técnica de atornillado | Bosch Rexroth AG 137/265
Estado del ángulo – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 07 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado del ángulo
OK
Valor 1 1
Par (M) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 08 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par (M) 20,00
Valor 002000 6
Ángulo (W) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 09 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo (W) 60
Valor 00060 5
Sello de fecha Fecha y hora del atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 10 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Sello de fecha 2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Estado contador OK/NOK Estado del contador OK/NOK.
– 0: cuando no es 1 ó 2
– 1: Ch x.y CntOK = 1
– 2: Contador OK/NOK no utilizado (no configurado)
El valor está compuesto por un carácter ASCII.
ID 11 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado contador OK/NOK
Contador OK/NOK no utilizado
Valor 2 1
Longitud de datos Revisión 001 98
Tabla 7–29: MID 0065 Revisión 001
Parámetros Observación Bytes

138/265 Bosch Rexroth AG | Técnica de atornillado
MID 0065 Revisión 002
Tabla 7–30: MID 0065 Revisión 002
Parámetros Observación BytesID de tornillo Número consecutivo al activar OP para cada resultado de tornillo.
El valor está compuesto por diez caracteres ASCII.
ID 01 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:ID de tornillo 123456
Valor 0000123456 10
Código ID Contiene los primeros 25 Bytes del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 02 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Código ID 123456
Valor 123456 25
Número de tarea Número del contador OK/NOK seleccionado
El número de tarea está compuesto por dos caracteres ASCII.
ID 03 4
Rango de valores 01 – 99
Preajuste -
Ejemplo:Número de tarea 2
Valor 02 2
Número de programa de atorni-llado
Número del programa de atornillado actual
El valor está compuesto por tres caracteres ASCII.
ID 04 2
Rango de valores 000 – 999
Preajuste -
Ejemplo:Número de pro-grama de atorni-llado
5
Valor 005 3
Valor comodín La estrategia actual de la unidad de control de atornillado.
El valor está compuesto por dos caracteres ASCII.
ID 05 2
Valor fijo 99 2
Valor comodín El valor está compuesto por cinco caracteres ASCII.
ID 06 2
Valor fijo 00000 5

Técnica de atornillado | Bosch Rexroth AG 139/265
Valor límite contador OK – Inicio como canal independiente: Preajuste del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 07 2
Rango de valores 0000 – 9999
Preajuste – No hay preajuste con canal individual
– Valor fijo 0001 en inicio en una aplicación:
Ejemplo:Valor límite con-tador OK
12
Valor 0012 4
Valor contador OK Valor real del contador OK
El valor está compuesto por cuatro caracteres ASCII.
ID 08 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Valor contador OK
4
Valor 0004 4
Estado de atornillado Rexroth OP:
– 0: NOK
– 1: OK
El valor está compuesto por un carácter ASCII.
ID 09 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado de atorni-llado
OK
Valor 0 1
Estado contador OK/NOK Estado del contador OK/NOK.
– 0: cuando no es 1 ó 2
– 1: Ch x.y CntOK = 1
– 2: Contador OK/NOK no utilizado (no configurado)
El valor está compuesto por un carácter ASCII.
ID 10 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado contador OK/NOK
Contador OK/NOK no utilizado
Valor 2 1
Tabla 7–30: MID 0065 Revisión 002
Parámetros Observación Bytes

140/265 Bosch Rexroth AG | Técnica de atornillado
Estado par de apriete – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 11 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado par de apriete
High
Valor 2 1
Estado del ángulo – 0: Low
– 1: OK
– 2: High
El valor está compuesto por un carácter ASCII.
ID 12 2
Rango de valores 0 – 2
Preajuste -
Ejemplo:Estado del ángulo
OK
Valor 1 1
Estado de ángulo total Estado de ángulo total: no se admite.
El valor está compuesto por un carácter ASCII.
ID 13 2
Valor fijo 1 1
Estado de supervisión redun-dancia de corriente
Estado de supervisión de redundancia de corriente: no se admite.
El valor está compuesto por un carácter ASCII.
ID 14 2
Valor fijo 1 1
Estado de rosca de los tornillos autorroscantes
Estado de rosca de los tornillos autorroscantes: no se admite.
El valor está compuesto por un carácter ASCII.
ID 15 2
Valor fijo 0 1
Valor comodín El valor está compuesto por un carácter ASCII.
ID 16 2
Valor fijo 0 1
Valor comodín El valor está compuesto por un carácter ASCII.
ID 17 2
Valor fijo 0 1
Tabla 7–30: MID 0065 Revisión 002
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 141/265
Estado de error de atornillado Los bits de error muestran error en el sistema de atornillado, generado por los siguientes bits en el código de calidad:
– Bit 1 (AngTotH): El ángulo total está por encima del umbral de tole-rancia definido.
– Bit 2 (AngTotL): El ángulo total está por debajo del umbral de toleran-cia definido.
– Bit 3 (TorqH): El par de apriete está por encima del umbral de tole-rancia definido.
– Bit 4 (AnglH): El ángulo está por encima del umbral de tolerancia de-finido.
– Bit 14 ((C)Cw=0): CCw o Cw han fallado durante el atornillado
– Bit 15 (TorqL): El par de apriete está por debajo del umbral de tole-rancia definido.
– Bit 18 (prueba de arranque Startup): Prueba de arranque no OK
– Bit 21 (TimeH): El tiempo está por encima del valor de tolerancia de-finido.
– Bit 23 (En=0): Ha fallado la habilitación durante el atornillado
El valor está compuesto por diez caracteres ASCII.
ID 18 2
Rango de valores 0000000000 – 9999999999
Preajuste -
Ejemplo:Estado de error de atornillado
AngTotH
Valor 0000000001 10
Par (M) El valor se multiplica por 100, se redondea y se envía como número en-tero (redondeo a dos decimales).
El valor está compuesto por seis caracteres ASCII.
ID 19 2
Rango de valores 000000 – 999999
Preajuste -
Ejemplo:Par (M) 20,11
Valor 002011 6
Ángulo (W) El valor se indica en grados.
El valor está compuesto por cinco caracteres ASCII.
ID 20 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Ángulo (W) 60
Valor 00060 5
Ángulo total (WG) Ángulo total (WG): no se admite.
El valor está compuesto por cinco caracteres ASCII.
ID 21 2
Valor fijo 00000 5
Redundancia de corriente Valor de redundancia de corriente: no se admite.
El valor está compuesto por tres caracteres ASCII.
ID 22 3
Valor fijo 000 3
Tabla 7–30: MID 0065 Revisión 002
Parámetros Observación Bytes

142/265 Bosch Rexroth AG | Técnica de atornillado
Autorroscante-par Tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 23 2
Valor fijo 000000 6
Par de fricción-máximo Par de fricción en caso de tornillos autorroscantes: no tiene soporte.
El valor está compuesto por seis caracteres ASCII.
ID 24 2
Valor fijo 000000 6
Número de secuencia de tarea Número de secuencia de tarea no tiene soporte
ID 25 2
Valor fijo 00000 5
Sync-Schraub-ID Contador de ciclos
El valor está compuesto por cinco caracteres ASCII (valor máximo: 65535).
ID 26 2
Rango de valores 00000 – 99999
Preajuste -
Ejemplo:Sync-Schraub-ID 3232
Valor 03232 5
Número de serie Atornillador
El valor está compuesto por 14 caracteres ASCII.
ID 27 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Número de serie A36363
Valor A36363 14
Sello de fecha Fecha y hora del atornillado.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 28 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Sello de fecha 2009-01-12:14:43:57
Valor 2009-01-12:14:43:57 19
Longitud de datos Revisión 002 206
Tabla 7–30: MID 0065 Revisión 002
Parámetros Observación Bytes

Técnica de atornillado | Bosch Rexroth AG 143/265
MID 0065 Revisión 003
MID 0065 Revisión 004
Tabla 7–31: MID 0065 Revisión 003
Parámetros Observación BytesEsta revisión contiene la información de revisión 002 y la información adicional expuesta a continuación:
Unidad valores de par – 1: Nm
– 2: Ftlb
– 3: Inlb
– 4: Kpm
– 5: Kgfm
– 6: Kgm
– 0: el resto de unidades
El valor está compuesto por un carácter ASCII.
ID 29 2
Rango de valores 0 – 4
Preajuste -
Ejemplo:Unidad valores de par
Nm
Valor 1 1
Tipo de resultado – 1: Atornillado (programa 0 … 98)
– 2: Desatornillar (programa 99)
El valor está compuesto por dos caracteres ASCII.
ID 30 2
Rango de valores 01 – 02
Preajuste -
Ejemplo:Tipo de resultado Programa 99
Valor 02 2
Longitud datos revisión 003 (= longitud datos revisión 003 + longitud datos revisión 002) 213
Tabla 7–32: MID 0065 Revisión 004
Parámetros Observación BytesEsta revisión contiene la información de revisión 003 y la información adicional expuesta a continuación:
Parte 2 código ID Contiene los caracteres 26 – 50 del código ID.
El valor está compuesto por 25 caracteres ASCII.
ID 31 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 2 código ID 5432154321543215432154321
Valor 5432154321543215432154321 25
Parte 3 código ID Contiene los caracteres 51 – 64 del código ID. El resto de los caracteres se rellenan con espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 32 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Parte 3 código ID 11112222333344
Valor 11112222333344 25

144/265 Bosch Rexroth AG | Técnica de atornillado
7.5.3.9 Mensajes de errores de sistema
MID 0070 Suscripción de error de sistema emergente
MID 0071 Upload error del sistema emergente
MID 0071 Revisión 001
Parte 4 código ID Solo contiene espacios vacíos.
El valor está compuesto por 25 caracteres ASCII.
ID 33 2
Rango de valores
Preajuste -
Ejemplo:Parte 4 código ID
Valor 25
Longitud datos revisión 004 (= longitud datos revisión 004 + longitud datos revisión 003) 294
Tabla 7–32: MID 0065 Revisión 004
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Una suscripción para los errores del sistema, que pueden comunicarse a la unidad de control de atornillado.
Aviso: después de realizar la suscripción con éxito, se envía un mensaje de estado (MID 0076) por cada uno de los errores activos en el control al ordenador de rango superior.
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 11 Registro error del sistema ya está disponible
Enviado por: Unidad de control de atornillado
Si en la unidad de control de atornillado aparece un error del sistema, este es indicado en el ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: datos útiles 33 bytes
Posible respuesta: ninguna
Tabla 7–33: MID 0071 Revisión 001
Parámetros Comentario BytesNúmero de error El número de error está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Número de error 105
Valor 0105 4
Control estado preparado Siempre NOK (=0), ya que no se diferencia entre control y herramienta.
El valor está compuesto por un carácter ASCII.
ID 02 2
Valor fijo 0 1

Técnica de atornillado | Bosch Rexroth AG 145/265
MID 0072 Confirmación upload error del sistema
MID 0073 Anulación suscripción para errores de sistema
MID 0074 Confirmado error del sistema en la unidad de control de atornillado
Estado herramienta preparada Solo NOK, cuando aparece error de la herramienta.
– 1: OK
– 0: NOK
El valor está compuesto por un carácter ASCII.
ID 03 2
Rango de valores 0 – 1
Preajuste -
Ejemplo:Estado herra-mienta preparada
OK
Valor 1 1
Tiempo Fecha y hora cuando aparece el error.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 04 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Tiempo 2009-01-12:11:54:29
Valor 2009-01-12:11:54:29 19
Longitud de datos Revisión 001 33
Tabla 7–33: MID 0071 Revisión 001
Parámetros Comentario Bytes
Enviado por: ordenador de rango superior
Confirmación para MID 0071
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna
Enviado por: ordenador de rango superior
Anulación suscripción para errores de sistema
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 12 Registro error del sistema no disponible
Enviado por: Unidad de control de atornillado
Este mensaje lo envía la unidad de control de atornillado para informar al ordenador de rango superior de que se ha confirmado un error.
Aviso: -Revisión: 001

146/265 Bosch Rexroth AG | Técnica de atornillado
MID 0075 Confirmación error del sistema en la unidad de control de atornillado
MID 0076 Estado de error del sistema
MID 0076 Revisión 001
Campo de datos: número de error, 4 bytes
Posible respuesta MID N.º de error
Observación
Confirmación error del sistema en la uni-dad de control de atornillado
0075 –
Enviado por: ordenador de rango superior
Confirmación para MID 0074
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna
Enviado por: Unidad de control de atornillado
El estado de error de sistema se envía después aceptar la suscripción para errores de sistema de la unidad de control de atornillado.
Aviso: con el estado de error de sistema se informa al ordenador de rango superior de que actualmente hay un error de sistema activo en el control conectado. Por cada error del sistema activo en el control conectado se envía un mensaje de estado de error de sistema.
Revisión: 001
Campo de datos: datos útiles 36 bytes
Posible respuesta MID N.º de error
Observación
Confirmación estado de error de sistema 0077 –
Tabla 7–34: MID 0076 Revisión 001
Parámetros Observación BytesEstado de error del sistema – 0: No hay ningún error del sistema activo
– 1: Actualmente hay un error del sistema activo
El valor está compuesto por un carácter ASCII.
ID 01 2
Rango de valores 0 – 1
Preajuste -
Ejemplo:Estado de error del sistema
Hay un error del sistema activo
Valor 0 1
Número de error El valor está compuesto por cuatro caracteres ASCII.
ID 02 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Número de error 105
Valor 0105 4
Control estado preparado Siempre NOK (=0), ya que no se diferencia entre control y herramienta.
El valor está compuesto por un carácter ASCII.
ID 03 2
Valor fijo 0 1

Técnica de atornillado | Bosch Rexroth AG 147/265
MID 0077 Confirmación estado de error de sistema
MID 0078 Confirmar error del sistema en la unidad de control de atornillado
7.5.3.10 Mensajes temporales
MID 0080 Solicitud de la hora en la unidad de control de atornillado
Estado herramienta preparada Solo NOK, cuando aparece error de la herramienta.
– 1: OK
– 0: NOK
El valor está compuesto por un carácter ASCII.
ID 04 2
Rango de valores 0 – 1
Preajuste -
Ejemplo:Estado herra-mienta preparada
OK
Valor 1 1
Tiempo Fecha y hora cuando aparece el error.
El valor está compuesto por 19 caracteres ASCII en formato AAAA-MM-DD:HH:MM:SS.
ID 05 2
Rango de valores 0 – 9, - y :
Preajuste -
Ejemplo:Tiempo 2009-01-12:11:54:29
Valor 2009-01-12:11:54:29 19
Longitud de datos Revisión 001 36
Tabla 7–34: MID 0076 Revisión 001
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Confirmación para MID 0076
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna
Enviado por: ordenador de rango superior
Con este mensaje el ordenador de rango superior puede confirmar errores de clase 3.
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 58
01
No hay ningún error del sistema
Datos no válidos
Enviado por: ordenador de rango superior
Solicitud de la hora en la unidad de control de atornillado
Aviso: -Revisión: 001

148/265 Bosch Rexroth AG | Técnica de atornillado
MID 0081 Upload de la hora
MID 0082 Ajustar la hora en la unidad de control de atornillado
7.5.3.11 Mensajes de visualización
MID 0111 Indicación en la pantalla gráfica del atornillador
MID 0111 Revisión 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Upload de la hora 0081 –
Enviado por: Unidad de control de atornillado
Upload de la hora
Aviso: -Revisión: 001
Campo de datos: fecha y hora AAAA-MM-DD:HH:MM:SS, 19 bytes
Posible respuesta: ninguna
Enviado por: ordenador de rango superior
Ajustar la hora en la unidad de control de atornillado
Aviso: -Revisión: 001
Campo de datos: Fecha y hora AAAA-MM-DD:HH:MM:SS, 19 Bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Enviado por: ordenador de rango superior
Enviando este mensaje se puede mostrar texto en la pantalla gráfica del atornillador. Además el usuario puede de-terminar el tiempo para el texto que se va a mostrar y también si el operario debe confirmar el texto.
Aviso: -Revisión: 001
Campo de datos: datos útiles 117 bytes Distribución en cuatro líneas con 25 caracteres ASCII cada una. Hay que rellenar una línea a la derecha con menos de 25 caracteres con espacios en blanco (0x20). La pantalla del atornilla-dor puede mostrar un máximo de 15 caracteres por línea.
Posibles respuestas MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 01 Datos no válidos
Tabla 7–35: MID 0111 Revisión 001
Parámetros Observación BytesDuración de la indicación Tiempo en segundos durante el cual ha de mostrarse el texto.
El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores 0000 – 9999
Preajuste -
Ejemplo:Duración de la indicación
60
Valor 0060 4

Técnica de atornillado | Bosch Rexroth AG 149/265
Condición de borrado – 0: Ocultar el texto después la duración de la indicación o presionando el botón OK
– 1: Hay que presionar el botón OK (se ignora el parámetro duración de la indicación)
El valor está compuesto por un carácter ASCII.
ID 2 2
Rango de valores 0 – 1
Preajuste -
Ejemplo:Condición de borrado
Ocultar el texto después la duración de la indicación o presionando el botón OK
Valor 0 1
Línea 1 Rellenar con espacios vacíos cuando tenga < 25 caracteres.
El valor está compuesto por como máximo 25 caracteres ASCII. La pan-talla del atornillador puede mostrar un máximo de 15 caracteres por línea.
ID 3 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Línea 1 Encabezado
Valor Encabezado 25
Línea 2 Rellenar con espacios vacíos cuando tenga < 25 caracteres.
El valor está compuesto por como máximo 25 caracteres ASCII. La pan-talla del atornillador puede mostrar un máximo de 15 caracteres por línea.
ID 4 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Línea 2 Línea 2
Valor Línea 2 25
Línea 3 Rellenar con espacios vacíos cuando tenga < 25 caracteres.
El valor está compuesto por como máximo 25 caracteres ASCII. La pan-talla del atornillador puede mostrar un máximo de 15 caracteres por línea.
ID 5 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Línea 3 Línea 3
Valor Línea 3 25
Línea 4 Rellenar con espacios vacíos cuando tenga < 25 caracteres.
El valor está compuesto por como máximo 25 caracteres ASCII. La pan-talla del atornillador puede mostrar un máximo de 15 caracteres por línea.
ID 6 2
Rango de valores 0x20 – 0x7F
Preajuste -
Ejemplo:Línea 4 Línea 4
Valor Línea 4 25
Longitud de datos Revisión 001 117
Tabla 7–35: MID 0111 Revisión 001
Parámetros Observación Bytes

150/265 Bosch Rexroth AG | Técnica de atornillado
MID 0127 Cancelar trabajo
7.5.3.12 Mensajes de modo de funcionamiento
MID 0400 Suscripción automática/modo manual
MID 0401 Upload automático/modo manual
MID 0402 Confirmación Upload automático/modo manual
Enviado por: ordenador de rango superior
Con este comando se puede cancelar un trabajo en curso.
Aviso: la señal BMS JobAbort debe estar establecida en una entrada del módulo oprtcl.Revisión: 001 (soportado por Rexroth OP)
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.
Enviado por: ordenador de rango superior
Debido a este mensaje el operador de rango superior será informado sobre cada cambio del modo de funcionamien-to del sistema de atornillado (entre "automático" y "manual") a través de un mensaje (upload automático, MID 0401). Después de confirmar el registro (comando aceptado, MID 0005) la unidad de control de atornillado envía además un mensaje (upload automático/modo manual, MID 0401) con el modo de funcionamiento actual al ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 82 El registro para el modo automático/manual ya está disponible
Enviado por: Unidad de control de atornillado
Después de un cambio de modo de funcionamiento ("automático" y "manual") la unidad de control de atornillado informa al ordenador de rango superior con este mensaje sobre el nuevo modo de funcionamiento.
Aviso: -Revisión: 001
Campo de datos: Modo de funcionamiento, 1 Byte. El modo de funcionamiento se indica con los caracteres ASCII y puede ser:
0: modo automático
1: modo manual
Posible respuesta MID N.º de error
Observación
Confirmación upload automático/modo manual
0402 –
Enviado por: ordenador de rango superior
el ordenador de rango superior confirma el cambio de modo de funcionamiento (upload automático/modo manual, MID 0401).
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna

Técnica de atornillado | Bosch Rexroth AG 151/265
MID 0403 Anulación automática/modo manual
MID 0404 Selección automática/modo manual
MID 0410 Solicitud de ajuste AutoDisable
MID 0411 Respuesta de ajuste AutoDisable
Enviado por: ordenador de rango superior
Se restablece la suscripción a través de cambio del modo de funcionamiento (registro automático/modo manual, MID 0400).
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 83 El registro para el modo automático/manual no está disponible
Enviado por: ordenador de rango superior
Se modifica el modo de funcionamiento.
Aviso: - Revisión: 001 (Rexroth OP)
Campo de datos: modo de funcionamiento, 1 byte. El modo de funcionamiento se indica con los caracteres ASCII y puede ser:
0: modo automático
1: modo manual
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Enviado por: ordenador de rango superior
Solicita el ajuste "Bloquear herramienta" del contador OK/NOK activo. En el sistema operativo NEXO-OS se ajustará: menú Ajustes Contador OK/NOK Bloqueo al alcanzar el número OK/NOKAviso: -Revisión: 001 (Rexroth OP-Ford)
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta de ajuste AutoDisable 0411 –
Enviado por: Unidad de control de atornillado
Se envía el ajuste.
Aviso: -Revisión: 001 (Rexroth OP-Ford)
Campo de datos: datos útiles 4 bytes.
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –

152/265 Bosch Rexroth AG | Técnica de atornillado
MID 0411 Revisión 001
7.5.3.13 Mensajes de señal de salida BMS
MID 0500 Suscripción modificación de las señales de salida
MID 0501 Actualización de la modificación de las señales de salida
Tabla 7–36: MID 0411 Revisión 001
Parámetros Observación BytesEstado AutoDisable Estado del bloqueo automático en la opción Bloqueo al alcanzar el nú-
mero OK/NOK en Contador OK/NOK
Valores posibles:
– 00: no seleccionado
– 01: seleccionado
El valor está compuesto por dos caracteres ASCII.
ID -
Rango de valores 00 – 01
Preajuste -
Ejemplo:
Estado Auto-Disable
No establecido
Valor 00 2
Valor del contador OK/NOK Valor fijo 00
Valor fijo 00 2
Longitud de datos Revisión 001 4
Enviado por: ordenador de rango superior
Debido a este mensaje el operador de rango superior será informado sobre cada cambio de las señales de salida de libre configuración en el módulo OP-MS a través de un mensaje (upload modificación de las señales de salida, MID 0501). Después de confirmar el registro (comando aceptado, MID 0005) la unidad de control de atornillado en-vía además un mensaje (upload modificación de las señales de salida, MID 0501) con la asignación actual de las señales de salida al ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 86 El registro para modificación de las señales de sali-da ya está disponible.
Enviado por: Unidad de control de atornillado
La asignación de las señales de salida en el módulo OP-BMS-se ha modificado.
Aviso: -Revisión: 001, 002
Campo de datos: Número de señales, 8 Bytes o 16 Bytes
Posible respuesta MID N.º de error
Observación
Confirmación modificación upload de las señales de salida
0502 –

Técnica de atornillado | Bosch Rexroth AG 153/265
MID 0501 Revisión 001
MID 0501 Revisión 002
MID 0502 Confirmación de la actualización de la modificación de las señales de salida
Tabla 7–37: MID 0501 Revisión 001
Parámetros Observación BytesEsta revisión emite el valor de las primeras (8) señales de salida de asignación libre del módulo OP-BMS. La emisión tiene lugar en el orden en el que el usuario haya colocado las señales.
Señales Cada señal se representa mediante un Byte.
El significado de cada señal (p. ej., detección de posición) se obtiene como resultado del caso especial
ID ninguno
Rango de valores 0 (no está activo) o 1 (activo)
Preajuste -
Ejemplo:Señales Las señales pueden colocarse en el orden que de-
see.
Valor 0 0 1 0 0 1 0 0, por ejemplo, con: 8
Rdy
=0
NF
=0
InC
y=
1C
yCm
p=
0O
k=
0N
ok=
1B
attO
k=
0S
tart
Bn
=0
El primer bit del flujo de datos corresponde al bit 0.0 del módulo BMS oprtcl.
Longitud de datos Revisión 001 8
Tabla 7–38: MID 0501 Revisión 002
Parámetros Observación BytesEsta revisión emite el valor de las primeras 16 señales de salida de asignación libre del módulo OP-BMS. La emisión tiene lugar en el orden en el que el usuario haya colocado las señales.
Señales Cada señal se representa mediante un Byte.
El significado de cada señal (p. ej., detección de posición) se obtiene como resultado del caso especial
ID ninguno
Rango de valores 0 (no está activo) o 1 (activo)
Preajuste -
Ejemplo:Señales Las señales pueden colocarse en el orden que de-
see.
Valor 0 0 10 0 10 0 0 0 0 0 0 001, por ejemplo, con: 16
InC
y=
0N
ok=
0O
k=
1A
ppO
ut3
=0
App
Out
4=
0C
yCm
p=
1A
ppO
ut6
=0
App
Out
7=
0A
ppO
ut8
=0
App
Out
9=
0A
ppO
ut10
=0
App
Out
11=
0A
ppO
ut12
=0
App
Out
13=
0A
ppO
ut14
=0
Cnt
OK
=1
El primer bit del flujo de datos corresponde al bit 0.0 del módulo BMS oprtcl.
Longitud de datos Revisión 001 16
Enviado por: ordenador de rango superior
El ordenador de rango superior confirma las señales de salida (upload modificación de las señales de salida, MID 0501).
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta: ninguna

154/265 Bosch Rexroth AG | Técnica de atornillado
MID 0503 Anulación modificación de las señales de salida
MID 0504 Modificar el valor de las señales de entrada
MID 0504 Revisión 001
Enviado por: ordenador de rango superior
La suscripción para modificaciones de las señales de salida (registro modificación de señales de salida, MID 0500) se restablece.
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 87 El registro para modificación de las señales de sali-da no está disponible.
Enviado por: ordenador de rango superior
Con este mensaje se pueden modificar los valores de las 16 señales de entrada de libre configuración del módu-lo-BMS Open Protocol.
Aviso: -Revisión: 001
Campo de datos: Número de señales, 16 Bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Tabla 7–39: MID 0504 Revisión 001
Parámetros Observación BytesSeñales Cada señal se representa mediante un Byte.
El significado de cada señal (p. ej., detección de posición) se obtiene como resultado del caso especial
ID ninguno
Rango de valores 0 (no está activo) o 1 (activo)
Preajuste -
Ejemplo:Señales Las señales pueden colocarse en el orden que de-
see.
Valor 0 0 1 0 01 0 0 0 0 0 0 0 0 0 1, por ejemplo, con: 16
App
In0
=0
App
In1
=0
Res
Rs
=1
App
In3
=0
App
In4
=0
Dis
Rp
=1
App
In6
=0
App
In7
=0
App
In8
=0
App
In9
=0
App
In10
=0
Cnt
Res
=0
App
In12
=0
App
In13
=0
Res
F=
0A
ppIn
15=
1
El primer bit del flujo de datos corresponde al bit 0.0 del módulo BMS oprtcl.
Longitud de datos Revisión 001 16
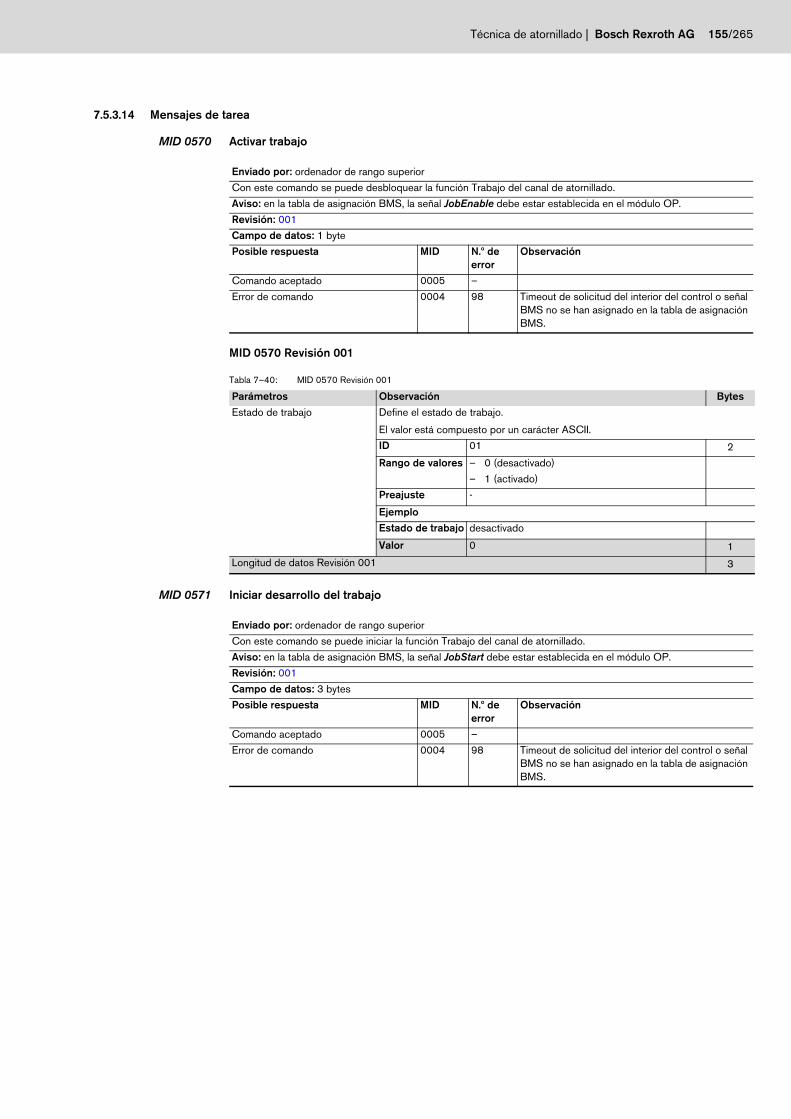
Técnica de atornillado | Bosch Rexroth AG 155/265
7.5.3.14 Mensajes de tarea
MID 0570 Activar trabajo
MID 0570 Revisión 001
MID 0571 Iniciar desarrollo del trabajo
Enviado por: ordenador de rango superior
Con este comando se puede desbloquear la función Trabajo del canal de atornillado.
Aviso: en la tabla de asignación BMS, la señal JobEnable debe estar establecida en el módulo OP.
Revisión: 001
Campo de datos: 1 byte
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.
Tabla 7–40: MID 0570 Revisión 001
Parámetros Observación BytesEstado de trabajo Define el estado de trabajo.
El valor está compuesto por un carácter ASCII.
ID 01 2
Rango de valores – 0 (desactivado)
– 1 (activado)
Preajuste -
EjemploEstado de trabajo desactivado
Valor 0 1
Longitud de datos Revisión 001 3
Enviado por: ordenador de rango superior
Con este comando se puede iniciar la función Trabajo del canal de atornillado.
Aviso: en la tabla de asignación BMS, la señal JobStart debe estar establecida en el módulo OP.
Revisión: 001
Campo de datos: 3 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.

156/265 Bosch Rexroth AG | Técnica de atornillado
MID 0571 Revisión 001
MID 0573 Seleccionar número de trabajo
MID 0573 Revisión 001
7.5.3.15 Estado de carga del pack de baterías de inserción y de la potencia de recepción del dispositivo inalámbrico
MID 0800 Solicitud estado de carga de batería
Tabla 7–41: MID 0571 Revisión 001
Parámetros Observación BytesNúmero del canal de atornillado Número del canal de atornillado.
El valor está compuesto por tres caracteres ASCII.
ID 01 2
Rango de valores 0 – 1
Preajuste -
EjemploNúmero del canal de atornillado
1
Valor 1 1
Longitud de datos Revisión 001 3
Enviado por: ordenador de rango superior
Con este comando se puede seleccionar el número de trabajo del canal de atornillado.
Aviso: en la tabla de asignación BMS, la señal Job<n> debe estar establecida en el módulo OP.
Revisión: 001
Campo de datos: 3 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 98 Timeout de solicitud del interior del control o señal BMS no se han asignado en la tabla de asignación BMS.
Tabla 7–42: MID 0573 Revisión 001
Parámetros Observación BytesNúmero de trabajo Número de trabajo.
El valor está compuesto por tres caracteres ASCII.
ID -
Rango de valores 000 - 999
Preajuste -
EjemploNúmero de tra-bajo
001
Valor 001 3
Longitud de datos Revisión 001 3
Enviado por: ordenador de rango superior
Solicitud del estado de carga de batería
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta estado de carga de batería 0801 – El estado de carga se transfiere como resultado de este comando.

Técnica de atornillado | Bosch Rexroth AG 157/265
MID 0801 Respuesta estado de carga de batería
MID 0802 Suscripción modificación de estado de carga de batería
Enviado por: Unidad de control de atornillado
Transmisión del estado de carga de batería
Aviso: -Revisión: 001
Campo de datos: Datos útiles 8 Bytes
Posible respuesta: ninguna
Tabla 7–43: MID 0801 Revisión 001
Parámetros Observación BytesCapacidad del pack de baterías de inserción
Capacidad del pack de baterías de inserción en porcentaje.
El valor está compuesto por tres caracteres ASCII.
ID 01 2
Rango de valores 000 – 100
Preajuste -
Ejemplo:Capacidad del pack de baterías de inserción
30%
Valor 030 3
Estado del pack de baterías de inserción
– 0: El pack de baterías de inserción no está introducido
– 1: El estado de carga de la batería es crítico (se apagará el sistema)
– 2: El estado de carga de la batería no permite más atornillados
– 3: El estado de carga de la batería está OK
– 4: Se ha introducido de nuevo el pack de baterías de inserción (se comprueba el estado de carga de batería)
– 5: Se ha alcanzado el nivel de advertencia del estado de carga de la batería
El valor está compuesto por un carácter ASCII.
ID 02 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado del pack de baterías de inserción
El estado de carga de la batería está OK
Valor 3 1
Longitud de datos Revisión 001 8
Enviado por: ordenador de rango superior
Suscripción para la modificación del estado de carga de batería.
Debido a este mensaje, se informará al ordenador de rango superior sobre cada cambio en el estado de carga la batería mediante un mensaje (upload modificación del estado de carga de batería, MID 0803). Después de confirmar el registro (comando aceptado, MID 0005), la unidad de control de atornillado envía además un mensaje (upload modificación de estado de carga de batería, MID 0803) con el estado de carga actual al ordenador de rango supe-rior.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 2 Bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 -
Error de comando 0004 35 La suscripción para la modificación del estado de carga ya está disponible

158/265 Bosch Rexroth AG | Técnica de atornillado
MID 0803 Upload modificación de estado de carga de batería
Tabla 7–44: MID 0802 Revisión 001
Parámetros Observación BytesModificación de estado de car-ga de batería
Selección del valor para la modificación de la capacidad del paquete de baterías de inserción, en porcentaje de la capacidad máxima (100 %). A partir de esta modificación de capacidad, se informará al ordenador de rango superior sobre el cambio en el estado de carga de batería a través de un mensaje (upload modificación de estado de carga de batería, MID 0803).
El valor está compuesto por dos caracteres ASCII.
ID -
Rango de valores 00 – 99
Preajuste -
Ejemplo:Modificación de estado de carga de batería
Valor introducido: 25 (=25%)
Estado de carga de batería: 100%
Se envía un mensaje cuando el estado de carga de batería alcanza el 75 %. Los mensajes siguientes se enviarán cuando el estado de carga de batería llegue al 50 y al 25 %.
Valor 25 2
Longitud de datos Revisión 001 2
Enviado por: Unidad de control de atornillado
Si surge una modificación en el estado de carga la batería, se indicará al ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 8 Bytes
Posible respuesta: ninguna
Tabla 7–45: MID 0803 Revisión 001
Parámetros Observación BytesCapacidad del pack de baterías de inserción
Capacidad del pack de baterías de inserción en porcentaje.
El valor está compuesto por tres caracteres ASCII.
ID 01 2
Rango de valores 000 – 100
Preajuste -
Ejemplo:Capacidad del pack de baterías de inserción
30%
Valor 030 3

Técnica de atornillado | Bosch Rexroth AG 159/265
MID 0804 Anulación de la suscripción modificación de estado de carga de batería
MID 0805 Requisito de la potencia de recepción
MID 0806 Respuesta potencia de recepción
Estado del pack de baterías de inserción
– 0: El pack de baterías de inserción no está introducido
– 1: El estado de carga de la batería es crítico (se apagará el sistema)
– 2: El estado de carga de la batería no permite más atornillados
– 3: El estado de carga de la batería está OK
– 4: Se ha introducido de nuevo el pack de baterías de inserción (se comprueba el estado de carga de batería)
– 5: Se ha alcanzado el nivel de advertencia del estado de carga de la batería
El valor está compuesto por un carácter ASCII.
ID 02 2
Rango de valores 0 – 5
Preajuste -
Ejemplo:Estado del pack de baterías de inserción
El estado de carga de la batería está OK
Valor 3 1
Longitud de datos Revisión 001 8
Tabla 7–45: MID 0803 Revisión 001
Parámetros Observación Bytes
Enviado por: ordenador de rango superior
Restablecimiento de la suscripción modificación de estado de carga de batería
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 36 La suscripción para la modificación del estado de carga no está disponible
Enviado por: ordenador de rango superior
Requisito de la potencia de recepción
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Respuesta potencia de recepción 0806 – La potencia de recepción se transfiere como resul-tado de este comando.
Enviado por: Unidad de control de atornillado
Transmisión de la potencia de recepción
Aviso: -Revisión: 001
Campo de datos: 6 bytes
Posible respuesta: ninguna

160/265 Bosch Rexroth AG | Técnica de atornillado
MID 0807 Suscripción modificación de la potencia de recepción
MID 0808 Upload modificación de la potencia de recepción
Tabla 7–46: MID 0806 Revisión 001
Parámetros Observación BytesPotencia de recepción El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores -45 – -90 dbm
Preajuste -
Ejemplo:
Potencia de recepción
-80 dbm
Valor -080 4
Longitud de datos Revisión 001 6
Enviado por: ordenador de rango superior
Suscripción para la modificación de la potencia de recepción
Aviso: -Revisión: 001
Campo de datos: Datos útiles 2 Bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 -
Error de comando 0004 37 La suscripción para la modificación de la potencia de recepción ya está disponible
Tabla 7–47: MID 0807 Revisión 001
Parámetros Observación BytesModificación de la potencia de recepción
Selección del valor para la modificación de la potencia de recepción como número entero. A partir de esta modificación de la potencia de re-cepción se informará al ordenador de rango superior sobre la modifica-ción en la potencia de recepción a través de un mensaje (upload modificación de potencia de recepción, MID 0808).
El valor está compuesto por dos caracteres ASCII.
ID -
Rango de valores 00 – 99 dbm
Preajuste -
Ejemplo:
Modificación de la potencia de recepción
10 dbm
Valor 10 2
Longitud de datos Revisión 001 2
Enviado por: Unidad de control de atornillado
Si se produce una modificación en la potencia de recepción, se indicará en el ordenador de rango superior.
Aviso: -Revisión: 001
Campo de datos: Datos útiles 6 Bytes
Posible respuesta: ninguna

Técnica de atornillado | Bosch Rexroth AG 161/265
MID 0809 Anulación de la suscripción modificación de potencia de recepción
7.5.3.16 Mensajes keep-alive
MID 9999 Mensaje keep-alive
Tabla 7–48: MID 0806 Revisión 001
Parámetros Observación BytesPotencia de recepción El valor está compuesto por cuatro caracteres ASCII.
ID 01 2
Rango de valores -45 – -90 dbm
Preajuste -
Ejemplo:
Potencia de recepción
-80 dbm
Valor -080 4
Longitud de datos Revisión 001 6
Enviado por: ordenador de rango superior
Restablecimiento de la suscripción para la modificación de potencia de recepción
Aviso: -Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Comando aceptado 0005 –
Error de comando 0004 38 La suscripción para la modificación de la potencia de recepción no está disponible
Enviado por: ordenador de rango superior
El ordenador de rango superior envía un mensaje keep-alive a la unidad de control de atornillado. La unidad de control de atornillado envía de vuelta al ordenador de rango superior el mensaje recibido.
Para la unidad de control de atornillado es válido un timeout de comunicación de 15 s (parametrizable vía BS), esto quiere decir que cuando no se ha intercambiado ningún mensaje entre el ordenador de rango superior y la unidad de control de atornillado durante más de 15 s, la unidad de control de atornillado considera que la conexión se ha interrumpido y la suprime.
Aviso:
Se recomienda enviar un mensaje cada 10 segundos (keep-alive u otro) como mínimo a la unidad de control de ator-nillado, para evitar la interrupción no deseada de la conexión (en caso de tiempos de latencia muy elevados en TCP/IP).
Revisión: 001
Campo de datos: está vacío, 0 bytes
Posible respuesta MID N.º de error
Observación
Mensaje keep-alive MID 9999 (reflejado por la unidad de control de atornillado)
–
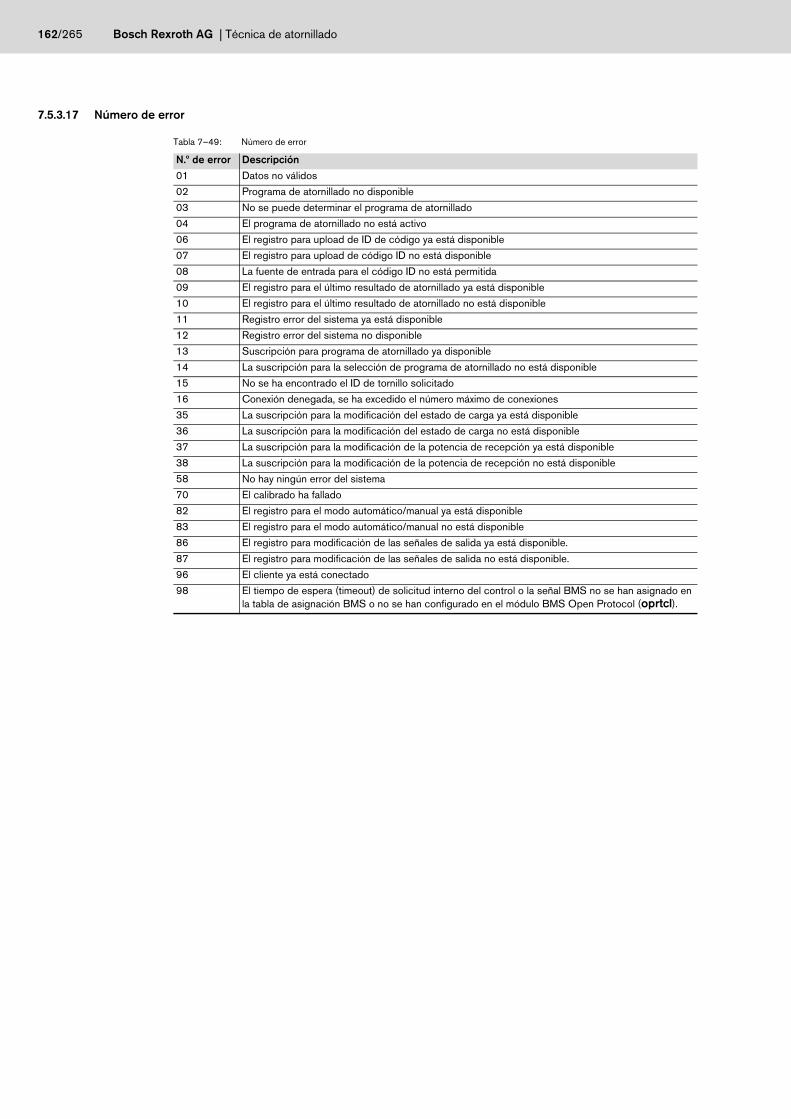
162/265 Bosch Rexroth AG | Técnica de atornillado
7.5.3.17 Número de error
Tabla 7–49: Número de error
N.º de error Descripción01 Datos no válidos
02 Programa de atornillado no disponible
03 No se puede determinar el programa de atornillado
04 El programa de atornillado no está activo
06 El registro para upload de ID de código ya está disponible
07 El registro para upload de código ID no está disponible
08 La fuente de entrada para el código ID no está permitida
09 El registro para el último resultado de atornillado ya está disponible
10 El registro para el último resultado de atornillado no está disponible
11 Registro error del sistema ya está disponible
12 Registro error del sistema no disponible
13 Suscripción para programa de atornillado ya disponible
14 La suscripción para la selección de programa de atornillado no está disponible
15 No se ha encontrado el ID de tornillo solicitado
16 Conexión denegada, se ha excedido el número máximo de conexiones
35 La suscripción para la modificación del estado de carga ya está disponible
36 La suscripción para la modificación del estado de carga no está disponible
37 La suscripción para la modificación de la potencia de recepción ya está disponible
38 La suscripción para la modificación de la potencia de recepción no está disponible
58 No hay ningún error del sistema
70 El calibrado ha fallado
82 El registro para el modo automático/manual ya está disponible
83 El registro para el modo automático/manual no está disponible
86 El registro para modificación de las señales de salida ya está disponible.
87 El registro para modificación de las señales de salida no está disponible.
96 El cliente ya está conectado
98 El tiempo de espera (timeout) de solicitud interno del control o la señal BMS no se han asignado en la tabla de asignación BMS o no se han configurado en el módulo BMS Open Protocol (oprtcl).

Técnica de atornillado | Bosch Rexroth AG 163/265
7.6 Rexroth IPM Protocol
Rexroth IPM Protocol sirve para la transmisión de los resultados del atornillador y las curvas de tornillo a través de TCP/IP en un sistema para gestión de datos de proceso integrado (IPM).
El paquete de aplicaciones "IPM" tiene interfaces estándar a través de los cuales aparatos de diferentes fabricantes pueden transmitir sus valores automáticamente al software IPM. De esta manera Rexroth IPM Protocol ayuda a evitar arquitecturas de software heterogéneas y a vincular entre sí informa-ción relevante para la calidad de diferentes partes de la cadena de producción.
Rexroth IPM Protocol es un protocolo de datos que tiene como objetivo la comunicación con un terminal remoto IPM-y debe estar instalado obligatoriamente en todo el sistema. Este terminal remoto IPM-no es un producto Bosch Rexroth. El terminar remoto IPM es un paquete de aplicaciones compuesto por puer-ta de enlace, servidor, base de datos e interfaz web para la visualización, análisis y archivo. El paquete de aplicaciones está compuesto por los siguientes componentes, véase imagen 7–3:
• Puerta de enlace IPM y servidor IPM
La puerta de enlace recibe los datos de medición (telegramas) del atornillador de batería Nexo, com-prueba que son correctos y los envía al servidor IPM. El servidor IPM envía los datos a la base de datos.
Hay 1...n puerta de enlace IPM y servidor IPM, los cuales siempre se presentan en pares en una re-lación 1:1.
• Base de datos IPM
En el banco de datos IPM se colocan los datos de medición. La interfaz web IPM accede desde la base de datos a toda la información que necesita. Actualmente tiene soporte para la versión Oracle a partir de 8.x. También es posible la instalación de otras bases de datos.
• Interfaz web IPM
La interfaz web IPM ofrece pone a disposición del usuario múltiples posibilidades para el análisis de datos. Se puede acceder a la interfaz web IPM a través del buscador sin necesidad de instalación por parte del cliente.
Los ajustes para el protocolo se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos IPM, véase el apartado Ajustes en la página 204.
En la versión IPM los valores de los pares se emiten siempre con decimales.

164/265 Bosch Rexroth AG | Técnica de atornillado
Figura 7–3: Arquitectura IPM
Antes de transmitir los resultados del atornillador y las curvas de atornillado a través de Rexroth IPM Protocol se realiza una conversión al formato utilizado por datos de proceso IPM y el sistema de análisis. El canal de atornillado y el programa de atornillado se utilizan en esta formato para identificar el punto de medición de la denominada "secuencia de tarea" (AFO). La información de proceso física y los datos de proceso se asignan a las características lógicas con la ayuda de asignación entre el canal de atornillado/programa de atornillado y AFO. Esta asignación se define y administra mediante la confi-guración en el sistema operativo NEXO-OS. La cantidad de los registros de datos también se configura mediante el sistema operativo NEXO-OS, en el menú Ajustes Datos Memoria de resultados (véase la página 209).
BuscadorServidor web
Base de datosServidor de la base
de datosservidor IPM (1…n)
Puerta de enlace IPM(1…n)
Punto de acceso
Nexo

Técnica de atornillado | Bosch Rexroth AG 165/265
7.6.1 Creación de mensajes
Tabla 7–50 muestra la estructura principal de un mensaje de Rexroth IPM Protocol.
Tabla 7–50: Estructura mensajes Rexroth IPM Protocol
Componente del mensaje Elemento Descripción del elemento ObservaciónEncabezado AFO Descripción AFO Para identificar la secuencia
de tarea (AFO)o el lugar de atornillado
Nombre Nombre AFO
Error de datos Pasos Pasos de atornillado
Valores reales/característi-cas1
1. En caso de que no exista un valor real para una característica, p. ej., porque la correspondiente función de super-visión no está activada en el programa de atornillado, se transmite un "Valor real dummy" con el valor 9999999. En caso de un análisis posterior en la interfaz web IPM, este pseudovalor de medición puede volver a filtrarse.
Valores reales medidos como
– Par (MI)
– Ángulo (WI)
– Gradiente (GI)
– Tiempo (TI)
– Par de límite (SI)
Valores reales de los pará-metros correspondientes:
– MI:
MA, M+, M-, MS
– WI:
WA, W+, W-
– GI:
GA, G+, G-
– TI:
TA, T+
– SI:
sin parámetros
Valores teóricos/paráme-tros
valores parametrizados de KE/CS, valores teóricos y valore límite así como pará-metros de la base de datos como valor teórico de par de límite
Los parámetros se identifi-can con claridad mediante la combinación de KE/CS, canal de atornillado y pro-grama de atornillado.
Curvas Curvas Curvas de resultado de atornillado filtrados (filtro de curvas) con y sin paso de atornillado
Los valores de pares de la salida de datos del atornillador de batería Nexo se redondean a dos posiciones para su transmisión al terminal remoto. Esto puede provocar un análisis erróneo en el terminal remoto IPM. Tenga en cuenta que el redondeo puede provocar evaluaciones erróneas.

166/265 Bosch Rexroth AG | Técnica de atornillado
7.7 Protocolo VW-XML
La comunicación entre el atornillador de batería con control remoto y el ordenador de rango superior (PC maestro) puede realizarse mediante el protocolo VW-XML. En la comunicación, el ordenador de rango superior opera como maestro y el atornillador de batería con control remoto como esclavo.
El protocolo VW-XML es un protocolo de comunicación basado en TCP/IP de Ethernet estándar.
El protocolo VW-XML utiliza los contadores OK/NOK del atornillador de batería con control remoto Nexo. Al ajustar el contador OK/NOK en el menú Ajustes Contador OK/NOK debe tenerse en cuenta lo siguiente:
1. en Selección de señales BMS active la entrada Prg0...Prg7;
2. en Registros de contador defina los siguientes ajustes:
a. en Sentido de conteo OK y Sentido de conteo NOK, el sentido de conteo es ascendente (1, 2...n).
El posible valor predeterminado por el PC maestro VW-XML para los atornillados NOK (etiqueta <MNO>) se incrementa en 1 ya que, tal como se define en el pliego de condiciones del grupo empresarial VW, tras el último atornillado NOK debe permitirse todavía un atornillado.
b. active la casilla de verificación en Bloqueo al alcanzar el número OK/NOK para el atornillador y el Prg99, es decir, al alcanzar el contador OK o NOK se bloquean el atornillador y el Prg99.
Después del primer atornillado no se podrá bloquear el atornillador de batería con control remoto Nexo ni con un resultado OK ni con un resultado NOK.
7.7.1 Asignación de las señales BMS
Para que el protocolo VW-XML pueda funcionar correctamente debe activarse el módulo BMS vwXml en el menú Ajustes Señales BMS.
• En Entradas deben establecerse todas las señales de mando (excepto las señales Cw y Ccw) en el módulo vwXml según las denominaciones marcadas en gris. Las señales Cw y Ccw se establecen en el módulo BMS tool.
• En Salidas deben establecerse todas las señales de mando en el módulo vwXml según las deno-minaciones marcadas en gris.
A partir de la versión 1200 del firmware Nexo se soporta el protocolo VW-XML. Se soporta la versión VW-XML 2.1.
Un uso del protocolo VW-XML fuera de VOLKSWAGEN AKTIENGESELLSCHAFT solo está permitido con una autorización expresa por escrito de VOLKSWAGEN AKTIENGESELLSCHAFT.
El protocolo VW-XML es la implementación, cuando sea posible su representación, del pliego de condi-ciones del grupo empresarial VW "Sistemas de atornillado controlados", capítulo 4 "Comunicación con unidades de rango superior" para el atornillador de batería con control remoto Nexo. En la presente do-cumentación se muestran únicamente los ajustes para el atornillador de batería con control remoto Nexo relativos al protocolo de datos VW-XML (véase la página 222), las informaciones básicas y generales es-tán descritas en el pliego de condiciones citado.
Los ajustes para el protocolo se realizan en el sistema operativo NEXO-OS, en el menú Ajustes Datos VW-XML, véase el apartado Ajustes en la página 204.

Técnica de atornillado | Bosch Rexroth AG 167/265
7.7.2 Particularidades de la edición de resultados VW-XML
El pliego de condiciones del grupo empresarial VW "Sistemas de atornillado controlados" define cinco procesos de atornillado o de apriete. Este apartado describe las parametrizaciones necesarias de los res-pectivos programas de atornillado, así como sus funciones de control en NEXO-OS para cumplir los re-quisitos de VW-XML.
Comparación de las denominaciones del paso de atornillado
Los siguientes datos de configuración del atornillador (en Ajustes Configuración) se implementarán en el protocolo de resultados VW-MXL:
7.7.3 Proceso de apriete
En el atornillador de batería con control remoto Nexo no existen pasos preconfigurados de programas de atornillado para los procesos de apriete definidos en el pliego de condiciones del grupo empresarial VW (véase el capítulo 2.3.2.3 del pliego de condiciones del grupo empresarial VW). Para poder reconocer el proceso AD o AW en la versión de VW-XML, los respectivos programas de atornillado deben satisfacer ciertos requisitos y presentar características especiales.
Proceso de apriete con par de giro (proceso AD)
La tabla 7–51 muestra cómo debe parametrizarse el proceso de atornillado AD-en el atornillador de ba-tería con control remoto Nexo.
Pliego de condiciones del grupo empresa-rial VW
Categoría Nexo del paso de atornillado
Paso de arranque Inicio
Paso de localización Función A
Paso de espera Función B
Paso de aflojamiento El programa de atornillado no está activo
Paso de preapriete Par de giro preliminar
Postensión Par de giro final
Parámetros Implementación VW-XML Código <PRC_SST><PAR><FAS><GRP><TYP>
Número de serie <PRC_SST><PAR><FAS><GRP><SNR>
Nombre del canal <PRC_SST><PAR><FAS><GRP><SBZ>
Tabla 7–51: Parametrización del proceso AD-
Función en NEXO-OS Parámetro en NEXO-OS Parámetro en el pliego de condiciones del grupo empresarial VW
Comentario
1.ª función de destino Par Par del valor teórico [MA]
2ª función de destino Ángulo Ángulo del límite superior (conectado) [WO]
Número de revoluciones Número de revoluciones del valor teórico [n]
Par de límite Par del valor umbral [MS]
Control del par de giro del valor mínimo
M– Tolerancia inferior del par [M–]
Control del par de giro del valor máximo
M+ Tolerancia superior del par [M+]
Control del ángulo del valor mínimo
W– Tolerancia inferior del ángu-lo [W–]

168/265 Bosch Rexroth AG | Técnica de atornillado
Proceso de apriete con ángulo de giro (proceso AW)
La tabla 7–52 muestra cómo debe parametrizarse el proceso de atornillado AW en el atornillador de ba-tería con control remoto Nexo.
I
Proceso de apriete con par de giro/ángulo de giro (proceso ADW)
Este proceso de apriete no puede definirse de manera unívoca mediante la parametrización del programa de atornillado y por ello no está soportado por el atornillador de batería con control remoto Nexo.
El atornillador de batería con control remoto Nexo no soporta las funciones de control descritas en el plie-go de condiciones del grupo empresarial VW.
Control del ángulo del valor máximo
W+ Tolerancia superior del án-gulo [W+]
Límite superior del tiempo Tiempo Tolerancia superior del tiempo [t+]
Límite inferior del tiempo Siempre fijo con el valor "0" asignado previamente
Tolerancia inferior del tiem-po [t–]
Tabla 7–52: Parametrización del proceso AW (par de giro superior)-
Función en NEXO-OS Parámetro en NEXO-OS Parámetro en el pliego de condiciones del grupo empresarial VW
Comentario
1.ª función de destino Ángulo Ángulo del valor teórico [WA]
2ª función de destino Par Par del límite superior (conectado) [MO]
Par del límite inferior Siempre fijo con el valor "0" asignado previamente
Par del límite inferior (conectado) [MU]
Número de revoluciones Número de revoluciones del valor teórico [n]
Par de límite Par del valor umbral [MS]
Control del par de giro del valor mínimo
M– Tolerancia inferior del par [M–]
Control del par de giro del valor máximo
M+ Tolerancia superior del par [M+]
Control del ángulo del valor mínimo
W– Tolerancia inferior del ángu-lo [W–]
Control del ángulo del valor máximo
W+ Tolerancia superior del án-gulo [W+]
Límite superior del tiempo Tiempo Tolerancia superior del tiempo [t+]
Límite inferior del tiempo Siempre fijo con el valor "0" asignado previamente
Tolerancia inferior del tiem-po [t–]
Tabla 7–51: Parametrización del proceso AD-
Función en NEXO-OS Parámetro en NEXO-OS Parámetro en el pliego de condiciones del grupo empresarial VW
Comentario

8 Puesta en marcha
Este documento describe la puesta en marcha y la configuración necesaria para el atornillador de batería con control remoto Nexo de Rexroth.
• Vista general (página 170)• Sistema operativo NEXO-OS (página 171)• Configuración (página 172)

170/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
8.1 Vista general
1) www.boschrexroth.com/business_units/brc/en/information_en/software_en/download_se_en/in-dex.jsp
8.1.1 Visión general de los pasos de puesta en marcha
Antes de la puesta en marcha compruebe si hay disponible un nuevo Servicepack en la zona de descar-gas1) en www.boschrexroth.com/schraubtechnik. Allí además encontrará:
• paquetes de servicios para versiones anteriores (si existen)
• actualizaciones actuales de Firmware
• Más información acerca del tema Up-/Downgrade de diferentes niveles de versión.
AVISO
Puesta en peligro de la seguridad del sistemaUna descarga de Firmware durante el funcionamiento pone en peligro la seguridad del sistema. Antes de una descarga de Firmware asegúrese de que el sistema de atornillado no está en fun-
cionamiento.
Encontrará una descripción para la utilización de actualizaciones de firmware y Servicepacks en Versio-nes completas (véase la página 174).
Opcional para el atornillador acodado NXA: ajuste del cabezal acodado (véase la página 59)Opcional para el atornillador acodado NXV012-T: colocación de una salida especial
Colocar soporte de par de giro (véase la página 61)
Colocar accesorio en el atornillador (véase la página 64)
Introducir pack de baterías de inserción
Activar pack de baterías de inserción, pulsar el botón rojo en la batería
Accionar brevemente el interruptor de arranque en el atornillador manual
Acceder al sistema operativo NEXO-OS (véase la página 175)
Opcional: Actualizar la versión del firmware (véase la página 175)
Configurar el atornillador de batería con control remoto NEXO mediante el sistema operativo NEXO-OS (véase la página 171)
Figura 8–1: Visión general de los pasos de puesta en marcha
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 171/265
8.2 Sistema operativo NEXO-OS
8.2.1 Puesta en marcha
Para el sistema operativo NEXO-OS se soportan los siguiente buscadores web:
• Internet Explorer a partir de la versión 7.0
• Mozilla Firefox a partir de la versión 3.6
• Apple Safari a partir de la versión 6.1.2
• Google Chrome
Acceso al sistema operativo NEXO-OS1. Finalice todos los pasos de montaje.
2. Coloque la batería y presione el botón rojo de la batería para activarla.
3. Presione brevemente el interruptor de arranque en el atornillador manual.
4. Empuje hacia adelante la cubierta de interfaces.
5. Introduzca el MicroUSB en el adaptador Ethernet NX-A en las interfaces destinados para ello.
6. En su PC acceda a las conexiones de red y añada una nueva conexión LAN:
– haga clic sobre Características de conexiones LAN;
– active el Protocolo de Internet versión 4 (TCP/IPv4);
– haga clic en Características e introduzca la dirección 192.168.1. además de un número cualquie-ra que contenga de una a tres cifras (el 10 no).
Aviso: utilice como dirección una de las direcciones 192.168.1.1 ... 192.168.1.9. Si la WLAN se utiliza en la misma subred, pueden producirse problemas de enrutamiento.
– Confirme la entrada con OK.
7. Ahora abra su navegador web e introduzca la dirección IP por defecto del atornillador de batería con control remoto Nexo:
192.168.1.10
8. Después introduzca en la página de inicio de sesión los datos de usuario por defecto.
– Usuario: Bosch
– Contraseña: Robert
Configuración del sistema operativo NEXO-OS • Configuración WLAN (véase la página 231)
• Determinación de los programas de atornillado (véase la página 209)
• Determinación de la tabla de asignación BMS (véase la página 227)
• Ajuste de la hora del atornillador (véase la página 204)
Acceder a través de punto de acceso
El sistema operativo NEXO-OS basado en navegador posibilita la configuración del atornillador de bate-ría con control remoto Nexo desde cualquier ordenador. Para la transmisión de datos sin cable con WLAN entre el atornillador de batería con control remoto Nexo y un ordenador de servicio se necesita un punto de acceso. Se pueden utilizar puntos de acceso disponibles en la infraestructura (situación WLAN IEEE 802.11 a, b, g y h).
De manera estándar la interfaz WLAN está desactivada. Después de la activación se establece la cone-xión con el punto de acceso.
Encontrará información sobre el montaje del punto de acceso en el manual de instrucciones del punto de acceso.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

172/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
8.2.2 Asignación de las direcciones IP para el atornillador de batería con control remoto Nexo
La asignación de las direcciones IP para el atornillador de batería con control remoto Nexo se realiza a través del sistema operativo NEXO-OS. Encontrará más información al respecto en el párrafo WLAN (página 231).
8.3 Configuración
Cuando se suministra el atornillador de batería con control remoto Nexo este viene con la configuración estándar.
El resto de la configuración del atornillador de batería con control remoto Nexo y la adaptación de los programas de atornillado se realizan por medio del sistema operativo NEXO-OS (véase la página 173).
Mediante el menú Ajustes Por defecto del sistema operativo NEXO-OS se pueden restablecer todos los ajustes del atornillador de batería con control remoto Nexo al estado de entrega.
Encontrará información detallada sobre la comunicación de datos en el capítulo Servicio de datos a partir de la página 85.
Encontrará información detallada sobre el intercambio de señales de mando en el capítulo Señales de mando a partir de la página 73.
Una dirección IP solo puede utilizarse una vez.
Encontrará información detallada referente al tratamiento de errores de los conflictos de configuración en el capítulo Tratamiento de errores a partir de la página 253.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
9 Sistema operativo NEXO-OS
Este capítulo describe el sistema operativo NEXO-OS para el atornillador de batería con control remoto Nexo con sus menús y funciones.
• Generalidades del sistema operativo NEXO-OS (página 174)• Inicio del programa (página 175)• Resumen de las funciones (página 180)• Análisis (página 183)• Modo (página 185)• Trabajo (página 190)• Programa de atornillado (página 196)• Ajustes (página 204)• Diagnóstico (página 242)• Menú ayuda (página 246)

174/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.1 Generalidades del sistema operativo NEXO-OS
El sistema operativo para el atornillador con control remoto Nexo es una aplicación web. Se suministra como parte componente preinstalada del atornillador con control remoto Nexo.
9.1.1 Versiones completas
El software concibe la funcionalidad del atornillador con control remoto Nexo.
Este software (versión completa) se crea y preinstala para el desarrollo del producto y se suministra en el atornillador con control remoto Nexo.
Además, dispone de actualizaciones en Internet de las versiones completas con el fin de conservar el producto.
9.1.1.1 Vínculos de las versiones de software y firmware
Todos los componentes se suministran con firmware instalado.
Los vínculos de las versiones de software y firmware están actualizados en la página: http://www.schraubtechnik.com. En esta página encontrará indicaciones sobre cómo proceder con ac-tualizaciones o versiones anteriores.
En la página web http://www.schraubtechnik.com se ponen a su disposición los servicepacks.
Si utiliza los componentes en una instalación ya existente como repuesto o ampliación, debe emplear el firmware que se utiliza en la instalación.
AVISO
Las versiones de software y firmware incompatibles pueden perjudicar el funcionamiento del sistema de atornilladoDe una a otra versión de software y firmware se realizan amplios cambios en diferentes ámbitos del software o firmware. En parte, esto conlleva que el sistema se comporte diferente tras la actualización o cambio a una versión anterior de los componentes del sistema o que ya no funcione. En algunos casos, el sistema no está operativo inmediatamente tras haber actualizado o cambiado a una versión anterior. Realice una prueba de funcionamiento tras una actualización de firmware para asegurarse de
que el sistema de atornillado funciona correctamente.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 175/265
9.1.2 Actualizar la versión del firmware
Inicie la actualización de la versión del firmware mediante el sistema operativo NEXO-OS por medio del menú Ajustes Firmware, véase el apartado Firmware en la página 226.
Si se actualiza a una versión superior de firmware, se convertirán las configuraciones.
Actualización a la versión 1300
Con una actualización del firmware a la versión 1300 se adoptará la configuración actual para el modo en la columna A como modo de funcionamiento Automático.
En el modo se añade la columna B para el modo de funcionamiento Manual. Este modo de funcionamien-to contiene los siguientes ajustes por defecto en el paso inicial:
• la fuente del código ID para la emisión de resultados es el Contador de ciclos;
• la selección de programa está autorizada;
• la selección de trabajo no está autorizada.
Cambio a una versión anterior
En caso de cambiar a una versión anterior de la versión 1200, se eliminará la base de datos de resultados.
Se puede ejecutar un cambio a una versión anterior:
• A una versión más antigua que estuviera instalada en el atornillador.
Si se actualiza al firmware ya instalado previamente, se utilizarán las configuraciones ya existentes.
• A una versión más antigua que no estaba instalada en el atornillador.
Si se actualiza a una versión inferior de firmware, no se convertirán las configuraciones (se utilizarán las configuraciones por defecto).
9.2 Inicio del programa
El sistema operativo NEXO-OS basado en navegador posibilita la configuración y el control del atornilla-dor de batería con control remoto Nexo desde cualquier ordenador. Puede estar vinculado desde un or-denador, p. ej., a diferentes ventanas de navegador, al mismo tiempo que lo está con varios sistemas operativos del atornillador de batería con control remoto Nexo. También pueden vincularse con otros or-denadores con el sistema operativo de un atornillador de batería con control remoto Nexo.
1. Abra un navegador web en el ordenador.
2. Introduzca la dirección IP correspondiente del atornillador de batería con control remoto Nexo en la lista de direcciones del navegador.
– Al acceder a través del adaptador de programación NX-A:
192.168.1.10
– Al acceder a través de WLAN:
dirección IP que se introdujo en el menú Ajustes WLAN (véase la página 231).
Aparece la página de Login del sistema operativo NEXO-OS.
A partir de la versión 1100 del firmware Nexo solo puede iniciarse una actualización de firmware cuando la capacidad del pack de baterías de inserción es 25 %.
A partir de la versión 1300 del firmware Nexo se puede seleccionar el modo de funcionamiento (modo manual o modo automático) para el atornillador de batería con control remoto Nexo.
Controle todas las configuraciones, ajustes, programas y el factor MFU tras el cambio a una versión anterior.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

176/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Visualización de los valores reales y la curva actuales
A partir de la versión 1200 del firmware Nexo para poder visualizar los valores reales y la curva actuales no debe haber iniciado sesión en el sistema operativo NEXO-OS:
1. Abra un navegador web en el ordenador.
2. Después de la dirección IP correspondiente del atornillador de batería con control remoto Nexo in-troduzca lo siguiente en la barra de direcciones del navegador:
– /ActualValues: para visualizar los valores reales actuales;
– /ActualGraph: para visualizar la curva actual.
Ejemplo: 192.168.1.10/ActualValues
Carácter de separación de los números de coma flotante
Página de Login
Figura 9–1: Inicio de sesión
De forma estándar, los caracteres de separación del idioma se utilizan con los números de coma flotante, son los caracteres con los que el usuario se ha conectado en la página de inicio de sesión en el sistema operativo NEXO-OS, véase la figura 9–1.
En la página de Login se muestra de forma estándar el idioma con el que se ha configurado el navegador web.
Tabla 9–1: Inicio de sesión - Elementos
Elemento Descripción 1 Selección del usuario
Ajuste por defecto: Bosch2 Introducción de la contraseña para el nombre del usuario indicado.
Ajuste por defecto: Robert3 Selección del idioma
4 Al hacer clic en el botón, se accede a la ventana principal del sistema opera-tivo NEXO-OS.
2
4
1
3
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
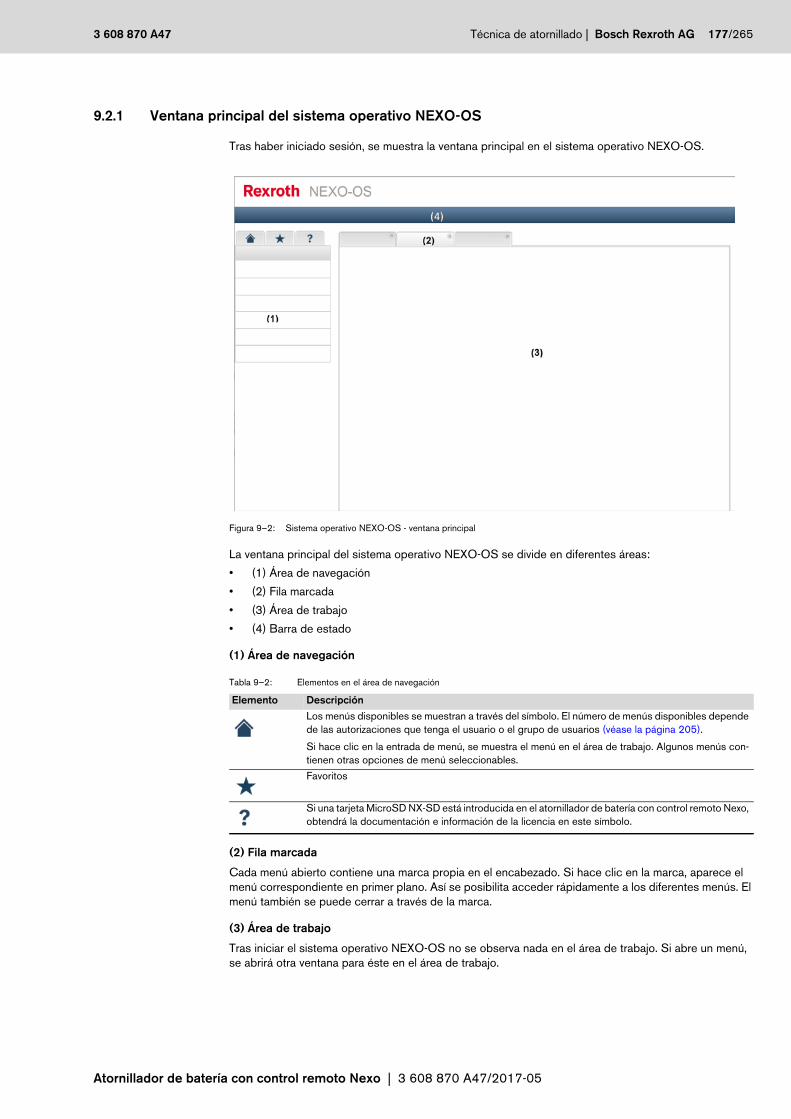
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 177/265
9.2.1 Ventana principal del sistema operativo NEXO-OS
Tras haber iniciado sesión, se muestra la ventana principal en el sistema operativo NEXO-OS.
Figura 9–2: Sistema operativo NEXO-OS - ventana principal
La ventana principal del sistema operativo NEXO-OS se divide en diferentes áreas:
• (1) Área de navegación
• (2) Fila marcada
• (3) Área de trabajo
• (4) Barra de estado
(1) Área de navegación
(2) Fila marcada
Cada menú abierto contiene una marca propia en el encabezado. Si hace clic en la marca, aparece el menú correspondiente en primer plano. Así se posibilita acceder rápidamente a los diferentes menús. El menú también se puede cerrar a través de la marca.
(3) Área de trabajo
Tras iniciar el sistema operativo NEXO-OS no se observa nada en el área de trabajo. Si abre un menú, se abrirá otra ventana para éste en el área de trabajo.
Tabla 9–2: Elementos en el área de navegación
Elemento Descripción Los menús disponibles se muestran a través del símbolo. El número de menús disponibles depende de las autorizaciones que tenga el usuario o el grupo de usuarios (véase la página 205).
Si hace clic en la entrada de menú, se muestra el menú en el área de trabajo. Algunos menús con-tienen otras opciones de menú seleccionables.
Favoritos
Si una tarjeta MicroSD NX-SD está introducida en el atornillador de batería con control remoto Nexo, obtendrá la documentación e información de la licencia en este símbolo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

178/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
(4) Barra de estado
Duración de la conexión activa
Si accede con el sistema operativo al atornillador de batería con control remoto Nexo, se desconectará automáticamente de forma estándar la conexión al cabo de 15 minutos.
Tabla 9–3: Elementos de la barra de estado
Elemento Descripción A partir de la versión 1100 del firmware Nexo: El nombre del canal que se estableció al configurar el atornillador se muestra al lado del sím-bolo, véase el apartado VW-XML, en la página 222.
Visualización del estado de carga actual del pack de baterías de inserción conectado
Muestra la conexión remota.
A partir de la versión 1300 del firmware Nexo: visualización del estado de la conexión de da-tosModo automático o modo manual
– Símbolo verde
Todos los servicios de datos activos están conectados.
– Símbolo rojo
Al menos un servicio de datos no está conectado.
– Símbolo gris
No hay servicios de datos activos.
Estado operativo del atornillador
LED izquierdo:
– amarillo fijoLiberación (señales BMS "Enable" o "Active Enable")
– Apagado
No hay liberación (señales BMS "Enable" o "Active Enable")
LED derecho:
– verde fijoAtornillador listo para funcionar
– amarillo intermitenteAtornillador no listo para funcionar
– rojo intermitenteError del sistema
Ciclo: ---- Número de atornillados
Indicador Online/Offline
Usuarios con sesión iniciada en el sistema operativo NEXO-OS
Cerrar sesión del sistema operativo NEXO-OS
--:-- Hora ajustada en el atornillador
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 179/265
La interrupción automática de la conexión no se produce en los siguientes casos:
• Está usted en estos momentos activo, es decir, intercambia datos con el hardware (consultar o enviar datos). Esto incluye, entre otras cosas:
– Inicio de sesión en el sistema
– Envío de configuraciones, programas de atornillado al hardware
– Lectura de programas de atornillado existentes por el hardware
– Consulta de datos de diagnóstico
• Ha abierto uno de los menús en el sistema operativo:
– Análisis Valores reales actuales,
– Análisis Memoria de valores reales,
– Análisis Curva actual,
– Análisis Memoria de curvas.
9.2.2 Salir del programa
En la barra de estado, haga clic en el siguiente icono para cerrar la sesión del sistema operativo NEXO-OS:
Se muestra una ventana de diálogo en la que tiene que confirmar el cierre de sesión.
Aparece nuevamente la ventana de inicio de sesión del sistema operativo NEXO-OS.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

180/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.3 Resumen de las funciones
El siguiente resumen muestra los menús disponibles y su función.
Menú Opción de menú 1
Opción de menú 2
Descripción Página
Análisis Valores reales ac-tuales
Muestra último resultado de atornillado (página 183)
Memoria de valo-res reales
Muestra todos los resultados de atornillado guar-dados
(página 183)
Curva actual Muestra último resultado de atornillado en una gráfica
(página 184)
Memoria de cur-vas
Muestra todos los resultados de atornillado guar-dados en una gráfica
(página 184)
Modo 1) Configuración del modo de funcionamiento (página 185)
Trabajo 1) Creación y modificación de trabajos (página 190)
Programas Creación y modificación de programas de atorni-llado
(página 196)
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 181/265
Ajustes Fecha y hora Ajustes de fecha y hora para el atornillador de ba-tería con control remoto Nexo
(página 204)
Cuentas de usua-rio
Usuario Agregar, editar o eliminar usuarios (página 205)
Admisión Agregar, editar o eliminar de pertenencia a grupos de usuarios
(página 206)
Grupos Agregar, editar o eliminar usuarios de grupos (página 206)
Autorizacio-nes
Agregar, editar o eliminar usuarios de autorizacio-nes de grupos
(página 206)
Mi perfil Visualización del perfil propio y modificación de contraseñas.
Exportación de los datos de usuario de un superu-suario a la tarjeta MicroSD 3).
(página 207)
Pantalla del ator-nillador
Ajuste de la pantalla gráfica en el atornillador de batería con control remoto Nexo y para el sistema operativo
(página 207)
Datos Memoria de resultados
Ajustes para la memoria de resultados interna (página 209)
Standard Nexo
FTP: Ajustes para la salida FTP
Tarjeta NX-SD 2): ajuste para la memorización de resultados en la tarjeta MicroSD NX-SD
HTTP 2): ajustes para la versión HTTP
File Share 2): ajustes para la versión File Share
(página 210)
(página 211)
(página 211)
(página 212)
Open Proto-col
Ajustes para la comunicación con el Rexroth Open Protocol
(página 218)
IPM Ajustes para la comunicación con el Rexroth IPM Protocol
(página 219)
VW-XML 2) Ajustes para la comunicación con el protocolo VW-XML
(página 222)
Configuración Muestra datos de configuración del atornillador (página 224)
Firmware Actualizar una nueva versión de firmware (página 226)
Señales BMS Crear y modificar la tabla de asignación BMS (página 227)
Contador OK/NOK
Configuración del contador OK/NOK (página 228)
Código de cali-dad 1)
Ajustes del código de calidad y el de retoque (página 229)
WLAN Configuración de la conexión WLAN (página 231)
Ajustes(Continua-ción)
Codificación 1) Activación de HTTPS (página 236)
LED 1) Ajustes de la iluminación del lugar de atornillado del atornillador
(página 237)
Asignación de ID 1)
Configuración de la tabla de asignación de ID (página 239)
Escáner 1) Configuración del escáner de códigos de barras en el atornillador de batería con control remoto Nexo
(página 239)
Por defecto 2) Restablecimiento al estado de entrega (página 241)
Backup/Restore Realización de una copia de seguridad de los da-tos, carga de los datos guardados
(página 241)
Menú Opción de menú 1
Opción de menú 2
Descripción Página
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
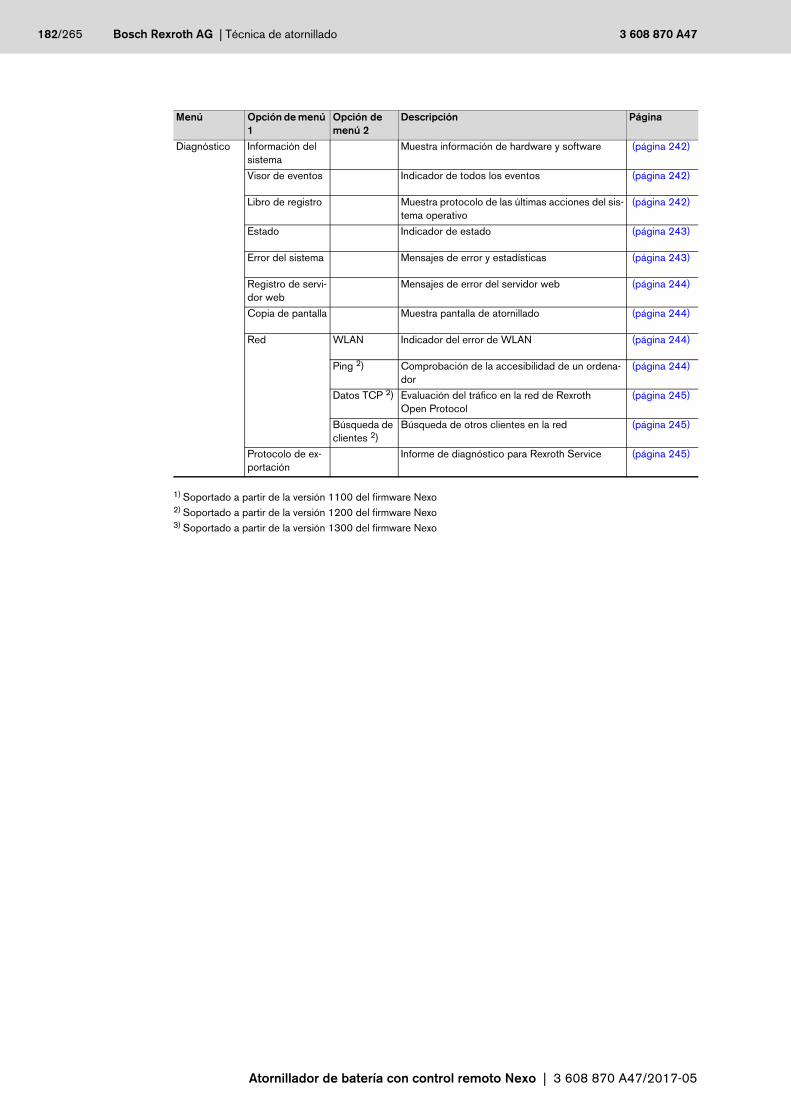
182/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
1) Soportado a partir de la versión 1100 del firmware Nexo2) Soportado a partir de la versión 1200 del firmware Nexo3) Soportado a partir de la versión 1300 del firmware Nexo
Diagnóstico Información del sistema
Muestra información de hardware y software (página 242)
Visor de eventos Indicador de todos los eventos (página 242)
Libro de registro Muestra protocolo de las últimas acciones del sis-tema operativo
(página 242)
Estado Indicador de estado (página 243)
Error del sistema Mensajes de error y estadísticas (página 243)
Registro de servi-dor web
Mensajes de error del servidor web (página 244)
Copia de pantalla Muestra pantalla de atornillado (página 244)
Red WLAN Indicador del error de WLAN (página 244)
Ping 2) Comprobación de la accesibilidad de un ordena-dor
(página 244)
Datos TCP 2) Evaluación del tráfico en la red de RexrothOpen Protocol
(página 245)
Búsqueda de clientes 2)
Búsqueda de otros clientes en la red (página 245)
Protocolo de ex-portación
Informe de diagnóstico para Rexroth Service (página 245)
Menú Opción de menú 1
Opción de menú 2
Descripción Página
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 183/265
9.4 Análisis
El menú Análisis contiene las siguientes opciones de menú:
• Valores reales actuales (página 183)
• Memoria de valores reales (página 183)
• Curva actual (página 184)
• Memoria de curvas (página 184)
En las diversas vistas obtendrá la siguiente información:
J (número de trabajo), P (número de programa de atornillado), S (paso en el programa de atornillado), OC (criterio de desconexión), QC (código de calidad), Ch (canal de atornillado) y RC (código de retoque).
9.4.1 Valores reales actuales
Análisis Valores reales actuales
Con esta opción de menú accederá a la pantalla de resultados del atornillado actual.
Indicador de resultados:
• Par (T)
• Ángulo (A)
• Tiempo (t)
9.4.2 Memoria de valores reales
Análisis Memoria de valores reales
Con esta opción de menú accederá a la pantalla de resultados de un atornillado guardado internamente.
Indicador de resultados:
• Par (T)
• Ángulo (A)
• Tiempo (t)
Tabla 9–4: Pestaña valores medidos actuales
Elemento Descripción Paso anterior Muestra los valores medidos de los pasos anteriores
Paso siguiente Muestra los valores medidos de los pasos siguientes
Tabla 9–5: Pestaña Memoria valores medidos
Elemento Descripción << Salto al primer atornillado guardado
< Salto al anterior atornillado guardado
<número> Entrada de un número de atornillado. A continuación se muestra el resultado de este atornillado en la memoria de valores reales.
> Salto al atornillado siguiente guardado
>> Salto al último atornillado guardado
Todos Se muestran todos los atornillados guardados
OK Se muestran solamente los atornillados OK guardados
NOK Se muestran solamente los atornillados no OK guardados
Según seleccione Todo, OK o NOK, se mostrará la cantidad de atornillados guardados.
Paso anterior Muestra los valores medidos de los pasos anteriores
Paso siguiente Muestra los valores medidos de los pasos siguientes
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

184/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.4.3 Curva actual
Análisis Curva actual
A través de esta opción de menú puede hacer que se muestre un indicador de resultados de los atorni-llados actuales en forma de gráfica siempre que estén disponibles. Los valores de medición se represen-tan por medio del ángulo (botón Ángulo) o del tiempo (botón Tiempo).
Tras la representación de la curva actual, el sistema operativo solicita automáticamente la siguiente curva.
9.4.4 Memoria de curvas
Análisis Memoria de curvas
A través de esta opción de menú puede hacer que se muestre un indicador de resultados de los atorni-llados guardados en forma de gráfica siempre que estén disponibles. Los valores de medición se repre-sentan por medio del ángulo (botón Ángulo) o del tiempo (botón Tiempo).
Tras la representación de la curva actual, el sistema operativo solicita automáticamente la siguiente curva.
Tabla 9–6: Pestaña Curva actual
Elemento Descripción Mín. Límite inferior del alcance del zoom
Máx. Límite superior del alcance del zoom
100 % Representación de la curva total
Puntos Número de puntos de curva que contiene el alcance del zoom y el número total de puntos de curva (solo indicación)
Si se utiliza como navegador la versión 8 de Internet Explorer, podrán producirse problemas con mu-chos puntos en la representación de curvas. En este caso aparecerá el mensaje de error "Stop running this script" (dejar de ejecutar este script).
Tabla 9–7: Pestaña Memoria de curvas
Elemento Descripción << Salto a la primera curva guardada
< Salto a la anterior curva guardada
<número> Entrada de un número de atornillado. A continuación se muestra el resultado de este atornillado en la memoria de curvas.
> Salto a la curva siguiente guardada
>> Salto a la última curva guardada
Todos Se muestran todas las curvas guardadas
OK Se muestran solamente las curvas OK guardadas
NOK Se muestran solamente las curvas NOK guardadas
Según seleccione Todo, OK o NOK, se mostrará la cantidad de atornillados guardados.
Mín. Límite inferior del alcance del zoom
Máx. Límite superior del alcance del zoom
100 % Representación de la curva total
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
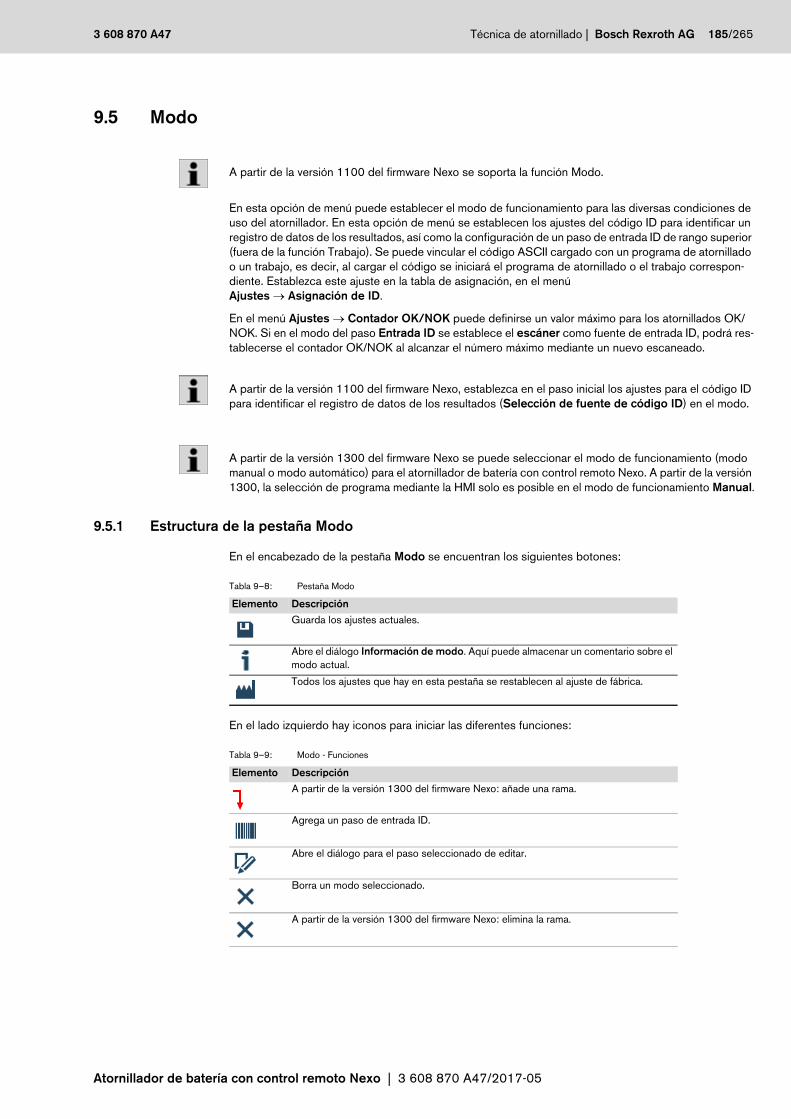
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 185/265
9.5 Modo
En esta opción de menú puede establecer el modo de funcionamiento para las diversas condiciones de uso del atornillador. En esta opción de menú se establecen los ajustes del código ID para identificar un registro de datos de los resultados, así como la configuración de un paso de entrada ID de rango superior (fuera de la función Trabajo). Se puede vincular el código ASCII cargado con un programa de atornillado o un trabajo, es decir, al cargar el código se iniciará el programa de atornillado o el trabajo correspon-diente. Establezca este ajuste en la tabla de asignación, en el menú Ajustes Asignación de ID.
En el menú Ajustes Contador OK/NOK puede definirse un valor máximo para los atornillados OK/NOK. Si en el modo del paso Entrada ID se establece el escáner como fuente de entrada ID, podrá res-tablecerse el contador OK/NOK al alcanzar el número máximo mediante un nuevo escaneado.
9.5.1 Estructura de la pestaña Modo
En el encabezado de la pestaña Modo se encuentran los siguientes botones:
En el lado izquierdo hay iconos para iniciar las diferentes funciones:
A partir de la versión 1100 del firmware Nexo se soporta la función Modo.
A partir de la versión 1100 del firmware Nexo, establezca en el paso inicial los ajustes para el código ID para identificar el registro de datos de los resultados (Selección de fuente de código ID) en el modo.
A partir de la versión 1300 del firmware Nexo se puede seleccionar el modo de funcionamiento (modo manual o modo automático) para el atornillador de batería con control remoto Nexo. A partir de la versión 1300, la selección de programa mediante la HMI solo es posible en el modo de funcionamiento Manual.
Tabla 9–8: Pestaña Modo
Elemento Descripción Guarda los ajustes actuales.
Abre el diálogo Información de modo. Aquí puede almacenar un comentario sobre el modo actual.
Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábrica.
Tabla 9–9: Modo - Funciones
Elemento Descripción A partir de la versión 1300 del firmware Nexo: añade una rama.
Agrega un paso de entrada ID.
Abre el diálogo para el paso seleccionado de editar.
Borra un modo seleccionado.
A partir de la versión 1300 del firmware Nexo: elimina la rama.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

186/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.5.2 Pasos del modo
Un modo siempre se inicia con un paso inicial y termina con un paso final; ambos ya están fijados.
9.5.3 Modificación del modo
Se puede modificar el modo.
Aplicar valores Haga clic sobre el botón OK para aplicar los valores modificados en el modo. Si hace clic en el botón
Cancelar, se descartan las modificaciones.
En ambos casos se cerrará la ventana de diálogo.
Si hace clic en el botón Guardar, se aplica el modo.
9.5.3.1 Paso del modo de funcionamiento
A partir de la versión 1300 del firmware Nexo se puede seleccionar el modo de funcionamiento (modo manual o modo automático) para el atornillador de batería con control remoto Nexo.
Ajustes
9.5.3.2 Paso inicial
Cada modo de funcionamiento tiene exactamente un paso inicial. Las propiedades del paso inicial tienen validez para el modo de funcionamiento correspondiente.
En este paso se establecen los ajustes para el modo de funcionamiento y para el código de identificación de un registro datos de los resultados del atornillador de batería con control remoto Nexo.
Tabla 9–10: Pasos del modo disponibles
Elemento Denominación Explicación ver páginaPaso del modo de funciona-miento
A partir de la versión 1300 del firmware Nexo: establecimiento del modo de funcionamiento que estará activo después de un reinicio o almacena-miento
(página 186)
Paso inicial Comienzo del modo (página 186)
Entrada de ID Agrega un paso de entrada ID. Solo se puede añadir un máximo de dos pasos de entrada ID.
(página 187)
Paso final Final del modo (página 189)
Haciendo doble clic en el paso del modo de funcionamiento o en el icono pertinente se abre un diálogo para introducir los parámetros correspondientes.
Tabla 9–11: Diálogo Paso del modo de funcionamiento
Elemento Descripción Seleccionar columna activa Establecimiento del modo de funcionamiento que estará activo después de
un reinicio o almacenamiento.
Haciendo doble clic en el paso inicial o en el icono pertinente se abre un diálogo para introducir los parámetros correspondientes.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 187/265
Opciones
Fuente de código ID
Ajustes del modo de funcionamiento
9.5.3.3 Entrada de ID
En este paso se establecen los ajustes para manejar las entradas de ID.
Tabla 9–12: Diálogo Paso inicial
Elemento Descripción Mostrar tiempo Indicación de durante cuánto tiempo se mostrará el texto en la pantalla del
atornillador.
Ajuste por defecto: 1 segundo
Tabla 9–13: Diálogo Paso inicial
Elemento Descripción Selección de fuente de código ID En esta selección se establece la fuente de código ID para la edición de re-
sultados:
– Ningún código IDSe ignora la recepción del código ID.
– Contador de ciclos Ajuste por defecto. El estado del contador de ciclos interno se utiliza para la creación del código ID.
– Open ProtocolLa entrada de ID dispuesta a través de Open Protocol se utiliza para la creación del código ID.
– Escáner El último código de barras válido leído se utiliza como código ID. Los ajus-tes en el (los) paso(s) de entrada ID del modo o trabajo serán ignorados en la versión del código ID.
– Distintas entradas de ID Se utilizará el código ID dispuesto en el (los) paso(s) de entrada ID del modo o trabajo.
– VW-XML (a partir de la versión 1200 del firmware Nexo)
La etiqueta <PI1> establecida por el PC maestro VW-XML solo se utili-zará para representar el código ID.
Borrar código ID tras inicio Visualización solo en Open Protocol, Escáner y VW-XML:
Con la casilla de verificación activa se borrará el código ID tras el inicio.
Tabla 9–14: Diálogo Paso inicial
Elemento Descripción Modo de funcionamiento En esta selección se establece el modo de funcionamiento del atornillador
de batería con control remoto Nexo: Automático (modo automático) o Ma-nual (modo manual)
Disparador 1)
1. La configuración solo es posible en el modo de funcionamiento Manual.
Definición del manejo del disparador para la activación del modo de funcio-namiento correspondiente:
HMI, Open Protocol o Señal BMS ManOpPermitir la selección del programa por HMI 1)
Con la casilla de verificación activada se autoriza la selección de programa.
Ajuste por defecto: activada
Permitir la selección del trabajo por HMI 1)
Con la casilla de verificación activada se autoriza la selección de trabajo.
Ajuste por defecto: desactivada
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

188/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
General
Fuente de código ID
En Fuente de código ID se muestran los ajustes que han sido definidos en el paso inicial en Fuente de código ID.
Si hace doble clic en el paso de entrada ID o en el icono pertinente, abrirá el diálogo co-rrespondiente a la introducción de parámetros.
Tabla 9–15: Diálogo Paso de entrada ID - Área Opciones del tiempo de espera
Elemento Descripción Nombre Nombre del paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Comentario Introducción de un comentario sobre el paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 189/265
Opciones de la entrada de ID
Opciones de tiempo de espera
Tabla 9–16: Diálogo Paso de entrada ID - Área Opciones de la entrada de ID
Elemento Descripción Selección de fuente de entrada de ID
En esta selección se establece la fuente de emisión de entrada de ID de este paso.
– Open ProtocolSe utiliza el código ID dispuesto a través de Open Protocol.
– Escáner (solo para atornilladores con escáner de códigos de barras inte-grado)
Se utiliza el código de barras válido leído.
Selección de destino de la entrada de ID
Aquí se seleccionan los siguientes ajustes para manejar la selección de las entradas de ID:
– Código IDLa entrada de ID se utiliza para la creación del código ID.
– Asignación de IDLa entrada de ID se utiliza para seleccionar un programa o trabajo en la tabla de asignación de ID.
– Código ID + Asignación de IDLa entrada de ID se utiliza para crear un código ID y para seleccionar un programa o trabajo en la tabla de asignación de ID.
Enmascaramiento: código IDEnmascaramiento: Asignación de ID
En función de la selección en Selección de destino de la entrada de ID se visualizará Enmascaramiento: código ID y/o Enmascaramiento: asigna-ción de ID.
Selección de los dígitos que se utilizan en la entrada de ID o en el código ID. Introduzca los números o rangos separados por punto y coma; el enmasca-ramiento cuenta de modo ascendente desde 1.
Ejemplo:
Código de barras leído: N25E9XO12345Enmascaramiento: 1;4;6-11Parte de código ID: NEXO1234
Texto de pantalla del atornillador Puede almacenar un texto para cada paso. El texto se mostrará en la pantalla del atornillador.
Control de trabajo externo Al activar la casilla de verificación, las señales BMS se utilizan en la selección de trabajo.
Tabla 9–17: Diálogo Paso de entrada ID - Área Opciones del tiempo de espera
Elemento Descripción Tiempo de espera Indicación del tiempo máximo que debe tardar en producirse un evento, por
ejemplo, el escaneado correcto de un código de barras. Si no se produce ningún evento en este tiempo, finaliza el paso.
Mensaje de error Entrada de un mensaje de error que se muestra en la pantalla del atornillador pasado el tiempo de espera.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

190/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Opciones de escaneado
Solo se muestra el campo al seleccionar Escáner como fuente de entrada de ID.
Códigos de barras
Solo se muestra el campo al seleccionar Escáner como fuente de entrada de ID. Active los tipos de có-digo de barras correspondientes.
9.5.3.4 Paso final
Todos los modos finalizan con el paso final. La herramienta se bloquea en este paso.
Tabla 9–18: Diálogo Paso de entrada ID - Área Opciones de escaneado
Elemento Descripción Activar proceso de escaneado El rayo láser del escáner de códigos de barras se puede activar en el inte-
rruptor de encendido o en las teclas de función. El proceso de lectura se ini-cia así. Si la señal BMS está establecida en EnScan, la autorización debe haberse ajustado por aquí previamente.
– Juego en el interruptor de arranque– Centrar tecla de función– Tecla de función izquierda– Tecla de función derecha– Señales BMS
Duración de conexión láser Indicación del tiempo máximo que el láser está conectado.
Señal acústica Si la casilla de verificación está seleccionada, sonará una señal acústica tras reconocer un código de barras.
Si hace doble clic sobre el paso final o en el icono apropiado, abrirá el diálogo correspon-diente a la introducción de parámetros.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 191/265
9.6 Trabajo
La función Trabajo permite ejecutar cadenas de procesos. Las que se suelen programar en un PLC (por ejemplo: escanear código de barras activar atornillador tres atornillados bloquear atornillador) se pueden parametrizar directamente como los denominados "trabajos" en el sistema operativo NEXO-OS.
A través de esta opción de menú puede crear y editar trabajos. Los trabajos se parametrizan de forma similar a los programas de atornillado, donde un trabajo es una sucesión de pasos internos, véase „Pasos de trabajo“ en la página 191.
9.6.1 Estructura de la pestaña Trabajo
En el encabezado de la pestaña Trabajo se encuentran los siguientes botones:
En el lado izquierdo hay iconos para iniciar las diferentes funciones:
A partir de la versión 1100 del firmware Nexo se soporta la función Trabajo.
Tabla 9–19: Pestaña Trabajo
Elemento Descripción Se pueden programar hasta 256 trabajos.
Guarda el trabajo actual.
Abre el diálogo Información de trabajo. Aquí puede guardar un comentario sobre el trabajo actual, 1000 caracteres como máximo.
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, ra-yas y guiones bajos.
Elimina el trabajo actual. Aparece una consulta sobre si realmente se quiere eliminar el trabajo.
Abre el diálogo Nombre. Aquí puede introducir un nombre nuevo para el trabajo.
Tabla 9–20: Trabajo - Funciones
Elemento Descripción Agrega un programa individual.
Agrega un paso de entrada ID. Se puede agregar un máximo de cinco pasos de en-trada ID previos a un paso de programa individual.
Abre el diálogo para el paso seleccionado de editar.
Elimina el paso seleccionado.
Abre el diálogo Importar. Seleccione el trabajo correspondiente que se debe impor-tar.
Abre un diálogo para exportar el trabajo.
Abre el diálogo Importar todo para importar todos los trabajos definidos.
Abre un diálogo para exportar todos los trabajos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

192/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.6.2 Pasos de trabajo
Un trabajo comienza siempre con un paso inicial y finaliza con un paso final; ambos ya se fijaron en un trabajo nuevo.
Entre medias pueden agregarse pasos de trabajo iguales o diferentes. La selección, el número y la se-cuencia de estos pasos de trabajo se fijan según lo exija el proceso de atornillado. Los pasos nuevos se agregan siempre antes de un paso seleccionado en el trabajo. Un trabajo puede contener un máximo de 20 pasos de trabajo.
La siguiente tabla ofrece una vista general de los pasos disponibles de un trabajo.
9.6.3 Crear de nuevo/modificar el trabajo
Puede configurar trabajos nuevos o modificar los existentes.
Aplicar valores Haga clic sobre el botón OK para aplicar los valores modificados en el programa de atornillado. Si
hace clic en el botón Cancelar, se descartan las modificaciones.
En ambos casos se cerrará la ventana de diálogo.
Si hace clic en el botón Guardar, se aplica el programa de atornillado.
9.6.3.1 Paso inicial
Cada trabajo tiene un paso inicial exacto. Las propiedades del paso inicial tienen validez durante todo el proceso de trabajo.
General
Tabla 9–21: Pasos disponibles de trabajo
Elemento Denominación Explicación ver páginaPaso inicial Comienzo del trabajo (página 191)
Entrada de ID Paso para manejar la entrada de ID (página 192)
Programa único Paso para el procesamiento básico (página 193)
Paso final Final del trabajo (página 195)
A partir de la versión 1200 del firmware Nexo ya no se abrirán más los submenús de los pasos mediante un menú desplegable, sino haciendo clic en el signo positivo (izquierdo).
Haciendo doble clic en el paso o en el icono pertinente se abre un diálogo para introducir los parámetros correspondientes.
Tabla 9–22: Diálogo Paso inicial - Área general
Elemento Descripción Nombre Nombre del paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Comentario Introducción de un comentario sobre el paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 193/265
Opciones
9.6.3.2 Entrada de ID
En este paso se establecen los ajustes para manejar las entradas de ID.
General
Opciones de la entrada de ID
Tabla 9–23: Diálogo Paso inicial - Área Opciones
Elemento Descripción Mostrar texto en la pantalla del atornillador
Puede almacenar un texto para cada paso de trabajo. El texto se mostrará en la pantalla del atornillador.
Mostrar tiempo Indicación de durante cuánto tiempo se mostrará el texto en la pantalla del atornillador.
Ajuste por defecto: 1 segundo
Cancelación de trabajo en caso de pasos NOK
Cancela el trabajo en cuanto el paso del trabajo proporciona un resultado no OK.
Eliminar código ID en el paso final Elimina el código ID del búfer de entrada. Para el siguiente trabajo se debe transferir un nuevo código ID al sistema.
Haga clic en el símbolo para agregar un nuevo paso de entrada de ID antes del paso se-leccionado en el programa de trabajo. Si hace doble clic sobre el paso o en el icono per-tinente, abrirá el diálogo correspondiente a la introducción de parámetros.
Tabla 9–24: Diálogo Paso de entrada ID - Área General
Elemento Descripción Identificador Nombre para la identificación clara del paso.
Nombre Nombre del paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Comentario Descripción del paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Tabla 9–25: Diálogo Paso de entrada ID - Área Opciones de la entrada de ID
Elemento Descripción Selección de fuente de entrada de ID
En esta selección se establece la fuente de emisión de entrada de ID de este paso.
– Open ProtocolLa entrada de ID dispuesta a través de Open Protocol se utiliza para la creación del código ID.
– Escáner El último código de barras válido leído se utiliza como código ID.
Selección de destino de la entrada de ID
Código ID (solo indicación):
La entrada de ID se utiliza como código ID en este paso.
Enmascaramiento Selección de los dígitos que se utilizan en la entrada de ID o en el código ID. Introduzca los números o rangos separados por punto y coma; el enmasca-ramiento cuenta de modo ascendente desde 1.
Ejemplo:
Código de barras leído: N25E9XO12345Enmascaramiento: 1;4;6-11Parte de código ID: NEXO1234
Texto de pantalla del atornillador Puede almacenar un texto para cada paso. El texto se mostrará en la pantalla del atornillador.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

194/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Opciones de tiempo de espera
Opciones de escaneado
Solo se muestra el campo al seleccionar Escáner como fuente de entrada de ID.
Códigos de barras
Solo se muestra el campo al seleccionar Escáner como fuente de entrada de ID. Active los tipos de có-digo de barras correspondientes.
9.6.3.3 Programa único
En este paso de trabajo se agrupan las funciones básicas para un proceso de trabajo sencillo.
General
Esta área establece las características generales del trabajo.
Tabla 9–26: Diálogo Paso de entrada ID - Área Opciones del tiempo de espera
Elemento Descripción Tiempo de espera Indicación del tiempo máximo que debe tardar en producirse un evento, por
ejemplo, el escaneado correcto de un código de barras. Si no se produce ningún evento en este tiempo, finaliza el paso.
Mensaje de error Entrada de un mensaje de error que se muestra en la pantalla del atornillador pasado el tiempo de espera.
Tabla 9–27: Diálogo Paso de entrada ID - Área Opciones de escaneado
Elemento Descripción Activar proceso de escaneado El rayo láser del escáner de códigos de barras se puede activar en el inte-
rruptor de encendido o en las teclas de función. El proceso de lectura se ini-cia así. Si la señal BMS está establecida en EnScan, la autorización debe haberse ajustado por aquí previamente.
– Interruptor de arranque– Centrar tecla de función– Tecla de función izquierda– Tecla de función derecha– Señales BMS
Duración de conexión láser Indicación del tiempo máximo que el láser está conectado.
Señal acústica Si la casilla de verificación está seleccionada, sonará una señal acústica tras reconocer un código de barras.
Haga clic en el símbolo para agregar un nuevo paso de programa individual antes del paso seleccionado en el programa de trabajo. Si hace doble clic sobre el paso o en el icono per-tinente, abrirá el diálogo correspondiente a la introducción de parámetros.
Tabla 9–28: Diálogo Programa único - Área General
Elemento Descripción Nombre Nombre del paso
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Comentario Descripción del paso de trabajo
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
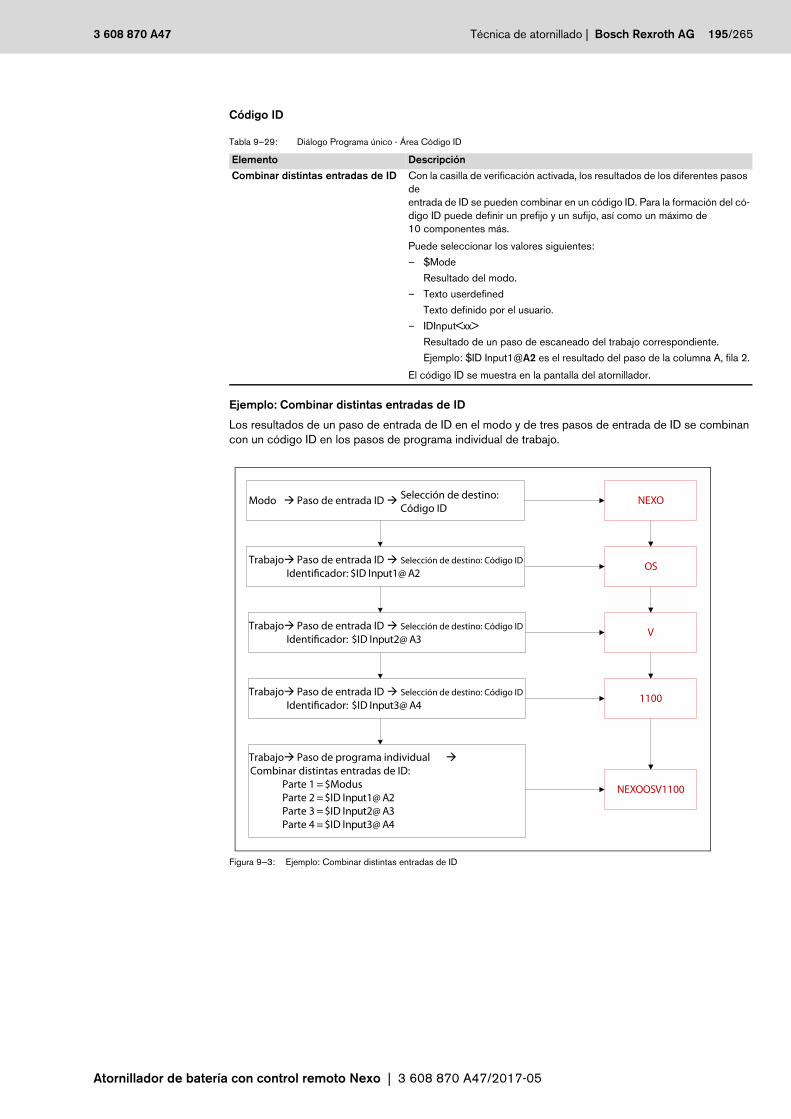
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 195/265
Código ID
Ejemplo: Combinar distintas entradas de ID
Los resultados de un paso de entrada de ID en el modo y de tres pasos de entrada de ID se combinan con un código ID en los pasos de programa individual de trabajo.
Figura 9–3: Ejemplo: Combinar distintas entradas de ID
Tabla 9–29: Diálogo Programa único - Área Código ID
Elemento Descripción Combinar distintas entradas de ID Con la casilla de verificación activada, los resultados de los diferentes pasos
de entrada de ID se pueden combinar en un código ID. Para la formación del có-digo ID puede definir un prefijo y un sufijo, así como un máximo de 10 componentes más.
Puede seleccionar los valores siguientes:
– $Mode
Resultado del modo.
– Texto userdefined
Texto definido por el usuario.
– IDInput<xx>
Resultado de un paso de escaneado del trabajo correspondiente.
Ejemplo: $ID Input1@A2 es el resultado del paso de la columna A, fila 2.
El código ID se muestra en la pantalla del atornillador.
Modo Paso de entrada ID Selección de destino: Código ID
Trabajo Identificador: $ID Input1@ A2
$ID Input2@ A3
$ID Input3@ A4
Trabajo Paso de programa individual Combinar distintas entradas de ID:
Parte 1 = $ModusParte 2 = $ID Input1@ A2Parte 3 = $ID Input2@ A3Parte 4 = $ID Input3@ A4
NEXO
OS
V
1100
NEXOOSV1100
Paso de entrada ID Selección de destino: Código ID
Paso de entrada ID Selección de destino: Código IDIdentificador:
Paso de entrada ID Selección de destino: Código IDIdentificador:
Trabajo
Trabajo
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

196/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillado
Opciones de tiempo de espera
9.6.3.4 Paso final
Un trabajo termina con el paso final.
General
Opciones
Tabla 9–30: Diálogo Programa individual - Área Atornillado
Elemento Descripción Texto de pantalla del atornillador Puede almacenar un texto para cada paso. El texto se mostrará en la pantalla
del atornillador.
Activar atornillador Desbloquear atornillador está activado (solo indicación): el atornillador se desbloquea en este paso.
Programa de atornillado – Nº de programaDefine el programa de atornillado que se va a procesar a continuación en este paso de trabajo. Los caracteres admitidos son valores enteros entre 0 y 255 (programas de atornillado 0 - 255).
– OK máx.Determina el número máximo de atornillados OK para este programa de atornillado. Los caracteres admitidos son valores enteros entre 0 y 255.
– NOK máx.Determina el número máximo de atornillados de no OK para este progra-ma de atornillado. Los caracteres admitidos son valores enteros entre 0 y 255.
Bloqueo condicional del programa de desatornillado
– Bloquear programa de desatornillado tras el atornillado de OKBloquea el programa de desatornillado nº 99 tras el atornillado de OK.
– Bloquear programa de desatornillado tras el atornillado de NOKBloquea el programa de desatornillado nº 99 tras el atornillado de NOK.
Tabla 9–31: Diálogo Programa individual - Área Opciones del tiempo de espera
Elemento Descripción Tiempo de espera Indicación del tiempo máximo que debe tardar en producirse un evento. Si
no se produce ningún evento en este tiempo, finaliza el paso.
Mensaje de error Entrada de un mensaje de error que se muestra en la pantalla del atornillador pasado el tiempo de espera.
Si hace doble clic sobre el paso final o en el icono apropiado, abrirá el diálogo correspon-diente a la introducción de parámetros.
Tabla 9–32: Diálogo Paso final - Rango general
Elemento Descripción Nombre Nombre del paso final
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Comentario Descripción del paso de trabajo
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Tabla 9–33: Diálogo Paso final - Área Opciones
Elemento Descripción Activar atornillador Activar atornillador está desactivado (solo indicación): el atornillador es blo-
queado en este paso.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 197/265
9.7 Programa de atornillado
A través de esta opción de menú puede crear y editar los programas de atornillado.
9.7.1 Definición: Función de destino, de supervisión o adicional
Dentro de los pasos de atornillado, se diferencian la función de destino, de supervisión y la adicional.
9.7.1.1 Función de destino
La función de destino es la función de control relevante dentro del paso de atornillado (p.ej., par del par de apriete del proceso de atornillado). Alcanzar el parámetro de destino (= valor nominal) lleva a la fina-lización paso de atornillado. Además de la primera función de destino que está activada permanentemen-te, también es posible activar una segunda función de destino. En caso de haber dos funciones de destino activadas, finaliza el paso de atornillado la función de destino que se haya alcanzado primero.
9.7.1.2 Función de supervisión
Dentro de un paso de atornillado se pueden activar una o más funciones de supervisión. Estas "observan" en el paso de atornillado el proceso de atornillado. Los parámetros de supervisión [= valor(es) límite(s) de la función de supervisión] son fundamentales para la valoración del paso de atornillado. Se pueden ajustar parámetros de supervisión con valor límite superior e inferior (p.ej., P+ y P–), pero también con un solo valor límite ajustable (p.ej., tiempo).
Se diferencia entre funciones de supervisión valoradas y conectadas.
Funciones de supervisión valoradas
En las funciones de supervisión valoradas se comprueban los resultados de atornillado obtenidos (p.ej. par de giro, ángulo de giro) al final del paso de atornillado frente a todas las funciones de supervisión establecidas en el paso de atornillado. Si los valores actuales de todas las funciones de supervisión se encontrasen dentro de los parámetros de supervisión establecidos, el paso de atornillado se valorará con OK. Si se han sobrepasado uno o más límites, el paso de atornillado se valorará con NOK. Se habrá so-brepasado el límite en los siguientes casos:
• Límite superior: valor real parámetro de supervisión;
• Límite inferior: valor real parámetro de supervisión.
Funciones de supervisión conectadas
Las funciones de supervisión conectadas contienen siempre una función valorada. Además, en caso de sobrepasar los parámetros de supervisión, finalizaría el paso de atornillado de forma anticipada (es decir, antes de alcanzar la función de destino) con NOK.
Si una función de supervisión estuviese valorada o conectada, se establecería por medio de la casilla de verificación correspondiente (menú Paso de atornillado estándar Supervisión (véase la página 201)).
9.7.1.3 Función adicional
Las funciones adicionales influyen en el proceso de atornillado (p.ej., supresión de marcha, estableci-miento del número de revoluciones), pero no pueden cancelarlo. No realizan valoración OK/NOK.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

198/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.7.2 Estructura de la pestaña Programas
En el encabezado de la pestaña Programas se encuentran los siguientes botones:
En el lado izquierdo hay iconos para iniciar las diferentes funciones.
Tabla 9–34: Pestaña Programas
Elemento Descripción Se pueden programar hasta 255 programas de atornillado y 1 programa de desator-nillado (programa n.º 99), cada uno con un máximo de 12 pasos (paso inicial y final incluidos).
Guarda el programa de atornillado actual.
Abre el diálogo Información del programa. Aquí puede guardar un comentario sobre el programa actual, 1000 caracteres como máximo.
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, ra-yas y guiones bajos.
Borra el programa de atornillado actual. Aparece una consulta sobre si realmente se quiere eliminar el programa.
Abre el diálogo Nombre. En este puede introducir un nuevo nombre de programa para el programa de atornillado.
Tabla 9–35: Programas - Funciones
Elemento Descripción Agregue un nuevo paso de atornillado.
Abre el diálogo para el paso seleccionado de editar.
Borre un paso de atornillado seleccionado.
Abre el diálogo Importar. Seleccione el programa de atornillado correspondiente que debe importarse.
A partir de la versión 1100 del firmware Nexo solo se pueden importar programas de atornillado con la extensión de archivo *.nxprg. Para importar programas de atornillado individuales del NEXO-OS V1000, modifique la extensión del archivo a *.nxprg.
Abre un diálogo para exportar el programa de atornillado.
Abre el diálogo Importar todo para importar todos los programas de atornillado definidos.
Abre un diálogo para exportar todos los programas de atornillado.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 199/265
9.7.3 Pasos de los programas de atornillado
El programa de atornillado comienza siempre con el paso inicial y finaliza con el paso final; ambos ya se fijaron en un programa de atornillado nuevo en el menú Programas. Entre medias pueden agregarse di-ferentes o iguales pasos de atornillado. La selección, el número y la secuencia de estos pasos de atorni-llado y pasos auxiliares se fijan según lo exija el proceso de atornillado. Los pasos nuevos se agregan siempre antes de un paso seleccionado en el programa de atornillado.
La siguiente tabla ofrece una vista general de los pasos disponibles de un programa de atornillado.
9.7.4 Volver a crear/modificar programa de atornillado
Un programa de atornillado contiene las siguientes informaciones:
• Tipo y secuencia de los pasos de atornillado
• El parámetro de destino y de supervisión de cada paso de atornillado.
Aplicar valores Haga clic sobre el botón OK para aplicar los valores modificados en el programa de atornillado. Si
hace clic en el botón Cancelar, se descartan las modificaciones.
En ambos casos se cerrará la ventana de diálogo.
Si hace clic en el botón Guardar, se aplica el programa de atornillado.
Tabla 9–36: Pasos disponibles de un programa de atornillado
Elemento Denominación Explicación ver páginaPaso inicial Comienzo del programa de atornillado (página 199)
Paso de atornillado estándar Los pasos de atornillado controlan el atornillador y el proceso de atornillado.
(página 201)
Paso final Final del programa de atornillado (página 203)
A partir de la versión 1200 del firmware Nexo se representan los pasos como hoja de propiedades.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
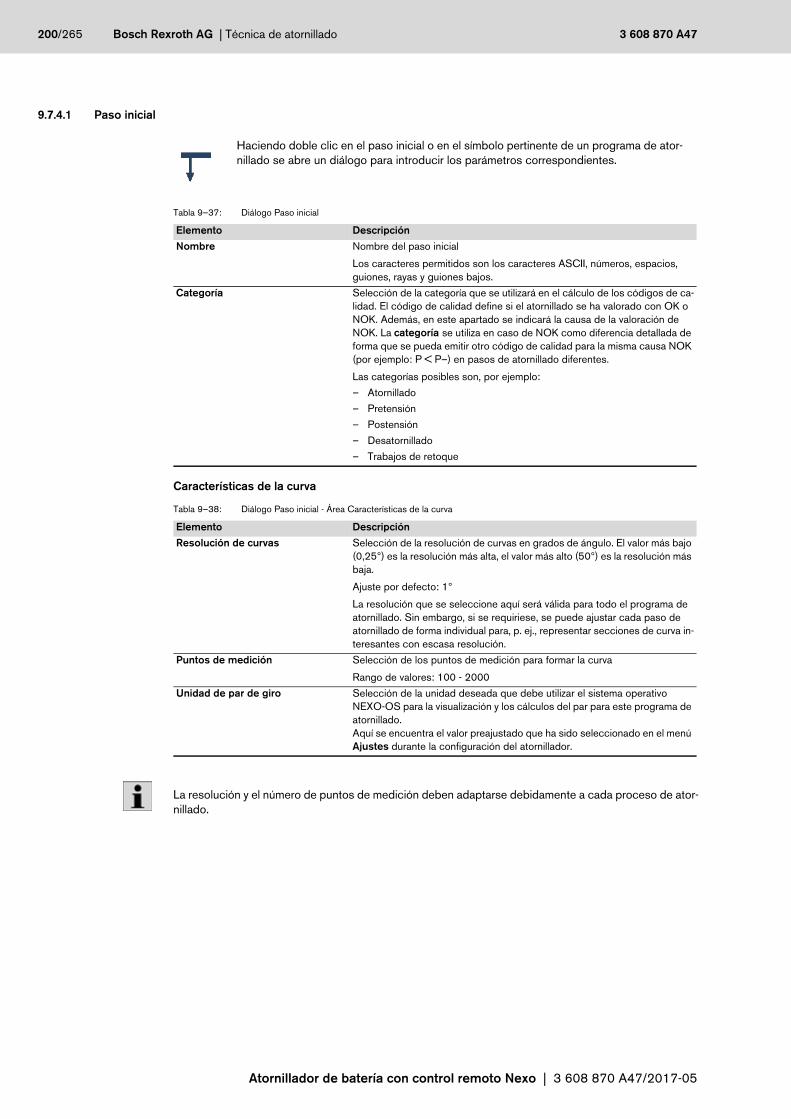
200/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.7.4.1 Paso inicial
Características de la curva
Haciendo doble clic en el paso inicial o en el símbolo pertinente de un programa de ator-nillado se abre un diálogo para introducir los parámetros correspondientes.
Tabla 9–37: Diálogo Paso inicial
Elemento Descripción Nombre Nombre del paso inicial
Los caracteres permitidos son los caracteres ASCII, números, espacios, guiones, rayas y guiones bajos.
Categoría Selección de la categoría que se utilizará en el cálculo de los códigos de ca-lidad. El código de calidad define si el atornillado se ha valorado con OK o NOK. Además, en este apartado se indicará la causa de la valoración de NOK. La categoría se utiliza en caso de NOK como diferencia detallada de forma que se pueda emitir otro código de calidad para la misma causa NOK (por ejemplo: P < P–) en pasos de atornillado diferentes.
Las categorías posibles son, por ejemplo:
– Atornillado
– Pretensión
– Postensión
– Desatornillado
– Trabajos de retoque
Tabla 9–38: Diálogo Paso inicial - Área Características de la curva
Elemento Descripción Resolución de curvas Selección de la resolución de curvas en grados de ángulo. El valor más bajo
(0,25°) es la resolución más alta, el valor más alto (50°) es la resolución más baja.
Ajuste por defecto: 1°
La resolución que se seleccione aquí será válida para todo el programa de atornillado. Sin embargo, si se requiriese, se puede ajustar cada paso de atornillado de forma individual para, p. ej., representar secciones de curva in-teresantes con escasa resolución.
Puntos de medición Selección de los puntos de medición para formar la curva
Rango de valores: 100 - 2000
Unidad de par de giro Selección de la unidad deseada que debe utilizar el sistema operativo NEXO-OS para la visualización y los cálculos del par para este programa de atornillado. Aquí se encuentra el valor preajustado que ha sido seleccionado en el menú Ajustes durante la configuración del atornillador.
La resolución y el número de puntos de medición deben adaptarse debidamente a cada proceso de ator-nillado.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 201/265
Parámetros
Prueba de arranque
Con la comprobación de arranque se detecta al inicio de un atornillado si el tornillo ya se ha apretado. Para ello el atornillador gira con los parámetros ajustados de la comprobación de arranque activada. Si la comprobación de arranque reconociese un tornillo ya apretado, se finalizará el proceso de atornillado con resultado no ok.
Primera función de destino
Funciones de supervisión (conectadas)
Tabla 9–39: Diálogo Paso inicial - Área de parámetros
Elemento Descripción Juego en el interruptor de arranque Selección del par de límite para el juego en el interruptor de arranque en por-
centaje del par nominal. A partir de este par de límite, se efectúan la valora-ción (OK/NOK) y la edición de resultados de un atornillado. Si el par máximo se encontrase por debajo del par de límite ajustado, se suprimirían valoración y edición de resultados.
Ajuste por defecto: 5 %
Se pueden ajustar valores entre el 0 y el 100 %.
Par de corrección Este factor de corrección sirve para adaptar el atornillador de batería con control remoto Nexo a un sistema de referencia externa.
Rango de valores: 0,8 - 1,2
Tabla 9–40: Diálogo Paso inicial - Área de prueba de arranque
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la comprobación de arran-
que.
La comprobación de arranque reduce la posibilidad de arranque de las ca-bezas de tornillo y de cabezal de salida al extraer un tornillo ya apretado.
Número de revoluciones La selección del valor del número de revoluciones (en % de número de revo-luciones nominal del atornillador configurado) con el que debe efectuarse la comprobación de arranque.
Ajuste por defecto: 5 %
Supresión de marcha Selección del margen de tiempo en el que no se realiza ninguna evaluación del proceso de atornillado desde el comienzo del paso de atornillado. La su-presión de marcha se refiere al inicio de la evaluación de los pares de giro. Comienza la medición de los valores angulares independientemente del valor ajustado. La supresión de marcha solo estará activa cuando se hayan modi-ficado las revoluciones al paso anterior.
Esta función se utiliza para ignorar el par máximo en la aceleración de gran-des masas. El par máximo puede provocarse, p.ej., mediante un atornillador manual colocado en la herramienta con grandes inercias de la masa.
Ajuste por defecto: 30 ms
Tabla 9–41: Diálogo Paso inicial - Área de la función de destino
Elemento Descripción Ángulo Selección del ángulo para la función de destino
Tabla 9–42: Diálogo Paso inicial - Área de la función de supervisión
Elemento Descripción Par máx. Selección del valor para la comprobación de arranque (en % del par nominal
del atornillador configurado, ajuste por defecto 5 %). Si se superase el valor, se cancelaría inmediatamente el proceso de atornillado con resultado NOK.
Tiempo máx. Selección de la duración de la comprobación de arranque. Si se superase el valor, se cancelaría inmediatamente el proceso de atornillado con resultado NOK.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

202/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.7.4.2 Paso de atornillado estándar
El paso de atornillado estándar cumple mediante una selección de las funciones de destino, adicional y de supervisión con los requisitos habituales de un paso de atornillado.
Este rango establece las características generales del paso de atornillado.
Haga clic en el símbolo para agregar un nuevo paso de atornillado antes del paso de ator-nillado seleccionado en el programa de atornillado. Si hace doble clic sobre el paso de ator-nillado o en el icono pertinente, abrirá el diálogo correspondiente a la introducción de parámetros.
Tabla 9–43: Diálogo Paso de atornillado - Área Denominación
Elemento Descripción Nombre Introducción del nombre del paso de atornillado. Las respectivas denomina-
ciones lógicas de los pasos de atornillado contribuyen a entender el progra-ma de atornillado ya en la vista general del programa (por ejemplo: 2, A primer apriete, 3, A apriete final).
Categoría Selección de la categoría que se utilizará en el cálculo de los códigos de ca-lidad. El código de calidad define si el atornillado se ha valorado con OK o NOK. Además, en este apartado se indicará la causa de la valoración de NOK. La categoría se utiliza en caso de NOK como diferencia detallada de forma que se pueda emitir otro código de calidad para la misma causa NOK (por ejemplo: P < P–) en pasos de atornillado diferentes.
Las categorías posibles son, por ejemplo:
– Atornillado
– Pretensión
– Postensión
– Desatornillado
– Trabajos de retoque
Resolución de curvas Selección de la resolución de curvas en grados de ángulo.
Los ajustes en el paso inicial determinan la resolución de las curvas para todo el programa de atornillado. Sin embargo, es posible de forma adicional con-figurar individualmente cada paso de atornillado de otro modo. De esta for-ma, pueden representarse pasos con una resolución muy pequeña y pasos con una resolución muy elevada dentro de un mismo atornillado. Se hace vi-sible todo el desarrollo de las curvas sin tener que elevar el número de pun-tos.
– ResoluciónAjuste de la resolución de la curva en grados de ángulo. El valor más pe-queño corresponde a la resolución más elevada y el valor más grande, a la resolución más baja.
Ajuste por defecto: Como en el inicioSe pueden dar los siguientes pasos de resolución:
– 0.25°
– 0.5°
– 1°
– 2°
– 5°
– 10°
– 20°
– 50°
La resolución real de las curvas depende de la configuración del atorni-llador.
Al utilizar toda la resolución (0,25°) y la cantidad máxima de puntos de medi-ción (2000), normalmente no se pueden destacar los procesos de curvas completos. En estos casos se debe adaptar la resolución convenientemente, es decir, configurarla más grande.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 203/265
Destino
Este rango contiene los parámetros adicionales necesarios para el paso de atornillado, que influye en el proceso de atornillado (p.ej., supresión de marcha), pero que no pueden cancelarlo.
Primera función de destino
La función de destino controla el desarrollo del proceso supervisando el parámetro de destino (p. ej.: par de giro) de un paso de atornillado y conduce a la finalización del paso, cuando el parámetro alcanza su valor de destino. El parámetro de destino es la magnitud de medición (p. ej.: par de giro) de un paso de atornillado que, para la correcta ejecución de un proceso de atornillado, debe alcanzar un valor determi-nado (valor de destino). Al alcanzar el valor de destino se considera el paso de atornillado por finalizado.
(O bien) 2.ª función de destino
Además de la primera función de destino que está activada permanentemente, también es posible selec-cionar una segunda función de destino. No se permite la selección de funciones de destino iguales. En caso de haber dos funciones de destino activadas, finaliza el paso de atornillado la función de destino que se haya alcanzado primero.
Función de supervisión
La función de supervisión observa durante el proceso de atornillado controlando un parámetro de super-visión que se respeten los valores límite superior e inferior.
Tabla 9–44: Diálogo Paso de atornillado - Área de destino
Elemento Descripción Número de revoluciones Selección del número de revoluciones (=número de revoluciones nominal)
que debe aplicarse al atornillar en dicho paso. Un número negativo de revo-luciones significa atornillado hacia la izquierda, un número positivo, hacia la derecha del tornillo.
Supresión de marcha Selección del tiempo para la supresión de marcha en ms en la que no se lleva a cabo supervisión del proceso de atornillado a partir del comienzo del paso de atornillado.
Dicha supresión de marcha es necesaria para suprimir un par de giro máximo que surge por los efectos de inercia de masa. Una razón posible para que haya un par de giro máximo excesivo puede ser un origen de número de re-voluciones excesivo, p. ej., una aceleración de n = 0 a 500 min-1.
Por norma general, no debe modificar el valor preajustado de 0 ms. Se re-quiere modificar ese tiempo cuando se montan en la salida de grandes ma-sas (p. ej., alimentos especiales) o si los pasos de atornillado son demasiado cortos (caso de atornillado fuerte). Se pueden ajustar valores entre 0 y 100 ms.
Par de límite Selección del par de límite para el inicio de la medición del ángulo.
Tabla 9–45: Diálogo Paso de atornillado - Área de la primera función de destino
Elemento Descripción Primera función de destino Selección de una función de destino e introducción del parámetro de destino
correspondiente.
– ParEl parámetro de destino dentro de un paso de atornillado es la magnitud de medición del par de giro. Éste debe alcanzar un valor determinado (va-lor nominal) para la correcta realización del atornillado lo que lleva al final del paso de atornillado.
– ÁnguloEl tornillo se gira de acuerdo al ángulo indicado. El recuento de ángulos comienza con la superación del par de límite.
– TiempoEl paso de atornillado finaliza al alcanzarse la duración de atornillado in-troducida. La función de supervisión Tiempo, que está activada por de-fecto, debe ser mayor que la duración de atornillado para que pueda calcularse el caso de atornillado con OK.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

204/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Si la función de supervisión está conectada, la violación de los valores límite provoca la finalización inme-diata del paso de atornillado. Si los canales están conectados, coloca los resultados del paso a NOK, incluso si se ha alcanzado el parámetro de destino.
El parámetro de supervisión es la magnitud de medición (p. ej.: el gradiente) de un paso de atornillado que, para la ejecución segura de un proceso de atornillado, debe mantenerse dentro de unos límites de-terminados. La violación de dichos límites puede provocar la finalización del paso de atornillado.
9.7.4.3 Paso final
Un programa de atornillado termina con el paso final.
El paso final finaliza el programa de atornillado; cierra cada columna del programa (A, B, etc.) del diagra-ma secuencial. Si el programa de atornillado tuviese ramificaciones, puede presentar varios pasos finales. El paso final se agrega de forma automática en el programa de atornillado y no se puede eliminar.
Tabla 9–46: Diálogo Paso de atornillado - Área de supervisión
Elemento Descripción Par, par de valor mínimo, par de valor máximo, ángulo, ángulo de valor mínimo, ángulo de valor máximo
Se pueden seleccionar adicionalmente estas funciones de supervisión.
Todos los límites de supervisión pueden marcarse como conectados. Si un límite está conectado, en caso de superarse o no alcanzarse, el proceso de atornillado será detenido con un resultado de NOK.
Si no está conectado, el proceso de atornillado será ejecutado hasta el final, aunque el resultado sea también NOK.
Tiempo Esta función de supervisión siempre está activa, es decir, debe introducirse un intervalo de tiempo para un tiempo de espera (timeout).
Si hace doble clic en el paso final o en el icono pertinente, abrirá el diálogo correspondien-te para la introducción del nombre.
Entonces, el atornillado total se podrá valorar solamente con OK, cuando se haya finalizado en la columna A. Si no se valorará con NOK.
Tabla 9–47: Diálogo Paso final - Área de ajustes
Elemento Descripción Nombre Nombre del paso final
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 205/265
9.8 Ajustes
El menú Ajustescontiene las siguientes opciones de menú:
• Fecha y hora (página 204)
• Cuentas de usuario (página 205)
• Pantalla del atornillador (página 207)
• Datos (página 209)
• Configuración (página 222)
• Firmware (página 226)
• Señales BMS (página 227)
• Contador OK/NOK (página 228)
• Código de calidad (página 229)
• WLAN (página 231)
• Codificación (página 236)
• LED (página 237)
• Asignación de ID (página 239)
• Escáner (página 239)
• Por defecto (página 241)
• Backup/Restore (página 241)
9.8.1 Fecha y hora
Ajustes Fecha y hora
Por medio de esta opción de menú establecerá los ajustes de fecha y hora para el atornillador de batería con control remoto Nexo y para el sistema operativo.
Todas las salidas del sistema de atornillado utilizan la hora local del atornillador. Esto también se aplica a las salidas del sistema operativo como valores reales o curvas.
La hora local del atornillador se proporciona una semana sin colocar la batería. Después, debe configu-rarse la hora local nuevamente.
Tabla 9–48: Pestaña Fecha y hora
Elemento Descripción Hora del sistema Muestra el ajuste de fecha y hora momentáneo del atornillador de batería con
control remoto Nexo.
Zona horaria Selección de zona horaria.
Hora del PC Muestra la hora actual del PC.
Hora adicional Los valores se pueden modificar introduciéndolos directamente o haciendo clic en las teclas.
Servidor NTP En el Servidor NTP se lleva a cabo el ajuste automático del reloj a través de un servidor de hora. En este caso, el reloj se ajusta cíclicamente (cada hora) a la hora del servidor de tiempo.
Guardar Aplica el ajuste seleccionado como hora del sistema.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

206/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.2 Cuentas de usuario
Ajustes Cuentas de usuario
Esta opción de menú es la administración de usuarios y contiene las siguientes opciones de menú:
• Usuario (página 205)
• Admisión (página 206)
• Grupos (página 206)
• Autorizaciones (página 206)
• Mi perfil (página 207)
Concepto de administración de usuarios
Se introduce un usuario (nuevo) con sus datos de usuario en el sistema operativo NEXO-OS. A cada usuario se le asignará un grupo de usuario y obtendrá autorizaciones.
Las autorizaciones de un grupo de usuario pueden ajustarse si se autorizan derecho de lectura y escritu-ra.
9.8.2.1 Usuario
Ajustes Cuentas de usuario Usuario
A través de esta opción de menú se muestran, agregan o eliminan usuarios así como sus nombres y datos de usuario.
Solamente los usuarios activos pueden iniciar sesión a través de la página de Login del sistema operativo NEXO-OS.
Tabla 9–49: Pestaña Usuario
Elemento Descripción Agregar Mediante el botón Agregar agregará un usuario nuevo:
1. Haga clic sobre el botón.
Al final de la lista se muestra una fila nueva.2. Mediante el botón Editar puede establecer los datos de un usuario nuevo
introducido.
Eliminar Mediante el botón Eliminar eliminará un usuario de la lista:1. Seleccione el usuario introducido de la lista.2. Haga clic sobre el botón Eliminar. Se eliminará al usuario de la lista.
Editar Mediante el botón Editar editará un usuario introducido: 1. Seleccione una entrada y haga clic sobre el botón Editar. 2. Modifique los datos correspondientes.3. Mediante el botón Ajustar contraseña modificará la contraseña.4. En la casilla de verificación seleccionada se activa el usuario.5. Mediante el botón Confirmar confirmará el ajuste.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 207/265
9.8.2.2 Admisión
Ajustes Cuentas de usuario Admisión
A través de esta opción de menú modificará la pertenencia a grupos. Todos los usuarios introducidos para el sistema operativo NEXO-OS y su pertenencia a grupos se representan en forma de matriz.
1. Seleccione el usuario de la lista.
2. Haga clic en el grupo correspondiente. Una marca identifica la nueva pertenencia a grupos.
3. Con el botón Guardar guardará los datos modificados. Con el botón Descartar descartará los datos modificados.
9.8.2.3 Grupos
Ajustes Cuentas de usuario Grupos
A través de esta opción de menú se muestran, agregan o eliminan grupos con su nombre y texto de des-cripción.
9.8.2.4 Autorizaciones
Ajustes Cuentas de usuario Autorizaciones
En esta opción de menú se muestran todos los grupos de usuario introducidos en el sistema operativo NEXO-OS y su autorización en forma de matriz.
1. Active la autorización correspondiente para el grupo. Los símbolos identifican los derechos de lec-tura y escritura.
2. Con el botón Guardar guardará los datos modificados. Con el botón Descartar descartará los datos modificados.
Agregar derechos de lectura y derechos de escritura
Si no se ha seleccionado grupo para el usuario, el usuario no tendrá derechos.
Tabla 9–50: Pestaña Grupos
Elemento Descripción Agregar Mediante el botón Agregar agregará un grupo nuevo.
1. Haga clic sobre el botón.
Al final de la lista se muestra una fila nueva.2. Introduzca el nombre correspondiente.
Eliminar Mediante el botón Eliminar eliminará un grupo introducido de la lista.
– Seleccione el grupo introducido de la lista.
– Haga clic sobre el botón Eliminar. Se eliminará al grupo de la lista.
Editar Mediante el botón Editar editará una entrada de grupo existente. Puede mo-dificar el nombre e introducir una descripción nueva o modificarla.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Elemento Descripción Si selecciona este símbolo, el grupo obtendrá derechos de lectura para la función seleccionada.
Si selecciona este símbolo, el grupo obtendrá derechos de escritura para la función seleccionada.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
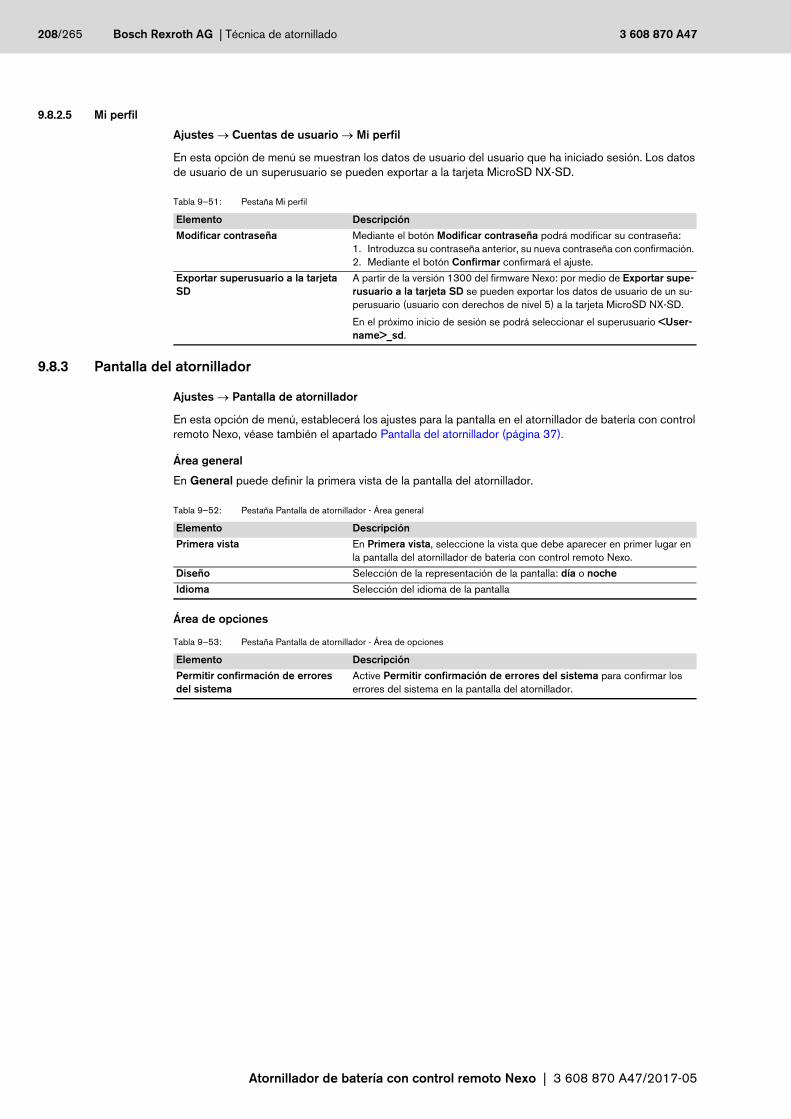
208/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.2.5 Mi perfil
Ajustes Cuentas de usuario Mi perfil
En esta opción de menú se muestran los datos de usuario del usuario que ha iniciado sesión. Los datos de usuario de un superusuario se pueden exportar a la tarjeta MicroSD NX-SD.
9.8.3 Pantalla del atornillador
Ajustes Pantalla de atornillador
En esta opción de menú, establecerá los ajustes para la pantalla en el atornillador de batería con control remoto Nexo, véase también el apartado Pantalla del atornillador (página 37).
Área general
En General puede definir la primera vista de la pantalla del atornillador.
Área de opciones
Tabla 9–51: Pestaña Mi perfil
Elemento Descripción Modificar contraseña Mediante el botón Modificar contraseña podrá modificar su contraseña:
1. Introduzca su contraseña anterior, su nueva contraseña con confirmación.2. Mediante el botón Confirmar confirmará el ajuste.
Exportar superusuario a la tarjeta SD
A partir de la versión 1300 del firmware Nexo: por medio de Exportar supe-rusuario a la tarjeta SD se pueden exportar los datos de usuario de un su-perusuario (usuario con derechos de nivel 5) a la tarjeta MicroSD NX-SD.
En el próximo inicio de sesión se podrá seleccionar el superusuario <User-name>_sd.
Tabla 9–52: Pestaña Pantalla de atornillador - Área general
Elemento Descripción Primera vista En Primera vista, seleccione la vista que debe aparecer en primer lugar en
la pantalla del atornillador de batería con control remoto Nexo.
Diseño Selección de la representación de la pantalla: día o nocheIdioma Selección del idioma de la pantalla
Tabla 9–53: Pestaña Pantalla de atornillador - Área de opciones
Elemento Descripción Permitir confirmación de errores del sistema
Active Permitir confirmación de errores del sistema para confirmar los errores del sistema en la pantalla del atornillador.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 209/265
Área de menú principal
Botones
Permitir confirmación de resulta-dos NOK
A partir de la versión 1200 del firmware Nexo: active Permitir confirmación de resultados NOK para confirmar los resultados NOK en la pantalla del atornillador.
Aviso: La activación estará activa después de realizar el primer atornillado tras la puesta en marcha del atornillador de batería con control remoto Nexo.
Si se ha establecido la señal NokAc en 0.3 - 0.5 en el módulo BMS tool, los resultados NOK también podrán confirmarse en la pantalla del atornillador (interruptor selector de programa en posición intermedia). Al establecer la señal de entrada BMS NokAc en la tabla BMS y activar la opción Permitir confirmación de resultados NOK, la opción tiene preferencia en la visuali-zación de la pantalla del atornillador.
Aviso: si se da un resultado NOK en la función activada Permitir confirma-ción de resultados NOK, la señal de salida BMS Rdy se establecerá en "Low". Tras la confirmación, la señal vuelve a establecerse en "High".
Mostrar estado de conexión de datos
A partir de la versión 1200 del firmware Nexo: con la casilla de verificación seleccionada se muestra el estado de conexión de datos en la pantalla del atornillador.
A partir de la versión 1300 del firmware Nexo Mostrar estado de conexio-nes de datos está activado de forma estándar.
Mostrar aviso láser Active Mostrar aviso láser para recibir un aviso si el escáner de códigos de barras está activado y así evitar lesiones.
Si selecciona casillas de verificación, se mostrará otra opción con las casillas de verificación Forzar lectura.
Tabla 9–54: Pestaña Pantalla de atornillador - Área de menú principal
Elemento Descripción Inscripciones En Inscripciones, seleccione las entradas que se deben mostrar en el menú
principal de la pantalla del atornillador de batería con control remoto Nexo y establezca la secuencia.
Con la casilla de verificación seleccionada se muestra la entrada del menú principal en la pantalla del atornillador de batería con control remoto.
Hacia arriba/Hacia abajo Mediante los botones Hacia arriba o Hacia abajo puede modificar la se-cuencia.
Tabla 9–55: Botones
Elemento Descripción Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Tabla 9–53: Pestaña Pantalla de atornillador - Área de opciones
Elemento Descripción
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

210/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.4 Datos
Ajustes Datos
Esta opción de menú sirve para administrar y transferir datos del atornillador de batería con control remo-to Nexo y contiene varias opciones de menú:
• Memoria de resultados (página 209)
• Standard Nexo (página 210)
• Open Protocol (página 218)
• IPM (página 219)
• VW-XML (página 222)
9.8.4.1 Memoria de resultados
Ajustes Datos Memoria de resultados
A través de esta opción de menú se establecen el lugar de guardado y los ajustes para guardar los re-sultados de medición.
Encontrará más información sobre la salida de datos en el capítulo Servicio de datos (véase la página 85).
A partir de la versión 1100 del firmware Nexo debe establecer los ajustes para el código ID para identi-ficar un registro de datos de los resultados en la opción de menú Modo (véase la página 185).
A partir de la versión 1100 del firmware Nexo los resultados se guardan en la memoria interna del atorni-llador. Además, los resultados se pueden guardar con formato *.json en el atornillador. la tarjeta MicroSD introducida en el atornillador.
Tabla 9–56: Pestaña Memoria de resultados
Elemento Descripción Resultados máx. Selección de número máximo de resultados que pueden guardarse. La me-
moria tiene una capacidad de 5.000 resultados con valor actual y curva.
Usar almacenamiento en anillo Indica si debe utilizarse un almacenamiento en anillo para los resultados: Después de sobrepasar el número máximo de atornillados almacenados, se sobrescribe el resultado más antiguo con el más reciente.
En caso de que no se seleccione el almacenamiento anular, el almacena-miento de resultados se detiene tras alcanzar el número máximo de atornilla-dos para los que se pueden guardar resultados. Para volver a activar el almacenamiento después de una parada de este tipo, primero se tiene que borrar la memoria de resultados.
Eliminar memoria de resultados Se eliminarán todos los resultados guardados.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
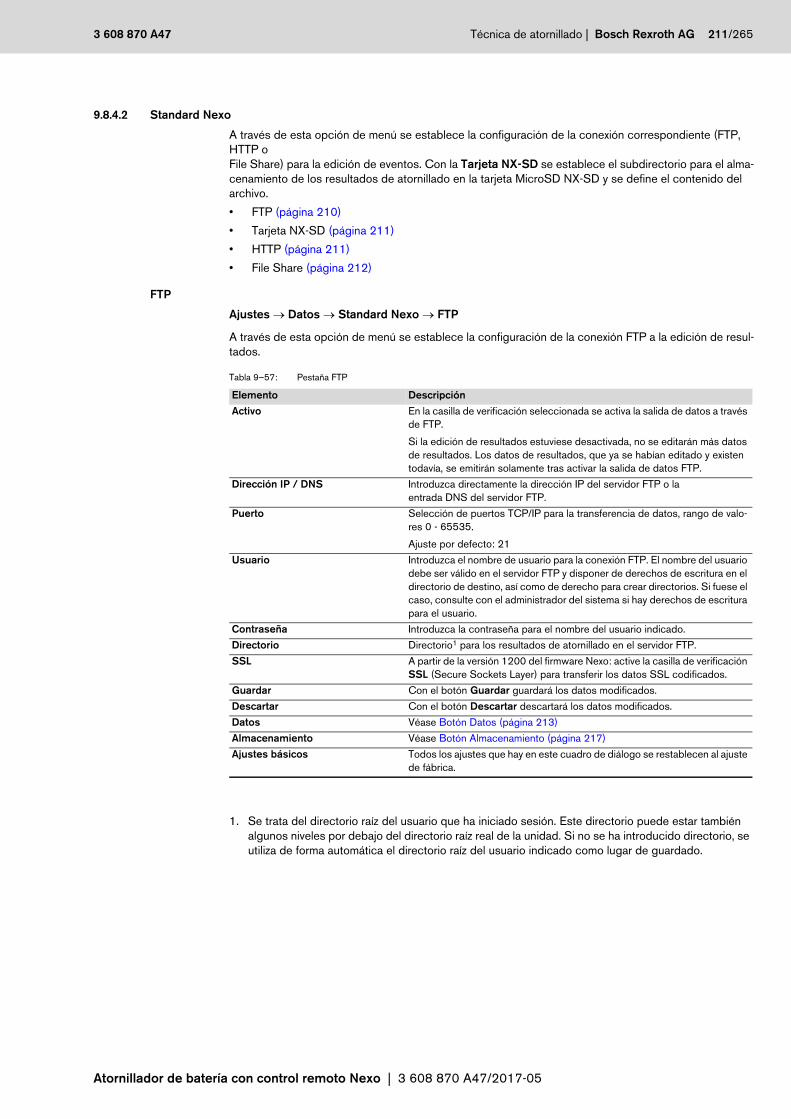
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 211/265
9.8.4.2 Standard Nexo
A través de esta opción de menú se establece la configuración de la conexión correspondiente (FTP, HTTP o File Share) para la edición de eventos. Con la Tarjeta NX-SD se establece el subdirectorio para el alma-cenamiento de los resultados de atornillado en la tarjeta MicroSD NX-SD y se define el contenido del archivo.
• FTP (página 210)
• Tarjeta NX-SD (página 211)
• HTTP (página 211)
• File Share (página 212)
FTP
Ajustes Datos Standard Nexo FTP
A través de esta opción de menú se establece la configuración de la conexión FTP a la edición de resul-tados.
Tabla 9–57: Pestaña FTP
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la salida de datos a través
de FTP.
Si la edición de resultados estuviese desactivada, no se editarán más datos de resultados. Los datos de resultados, que ya se habían editado y existen todavía, se emitirán solamente tras activar la salida de datos FTP.
Dirección IP / DNS Introduzca directamente la dirección IP del servidor FTP o la entrada DNS del servidor FTP.
Puerto Selección de puertos TCP/IP para la transferencia de datos, rango de valo-res 0 - 65535.
Ajuste por defecto: 21
Usuario Introduzca el nombre de usuario para la conexión FTP. El nombre del usuario debe ser válido en el servidor FTP y disponer de derechos de escritura en el directorio de destino, así como de derecho para crear directorios. Si fuese el caso, consulte con el administrador del sistema si hay derechos de escritura para el usuario.
Contraseña Introduzca la contraseña para el nombre del usuario indicado.
Directorio Directorio1 para los resultados de atornillado en el servidor FTP.
1. Se trata del directorio raíz del usuario que ha iniciado sesión. Este directorio puede estar también algunos niveles por debajo del directorio raíz real de la unidad. Si no se ha introducido directorio, se utiliza de forma automática el directorio raíz del usuario indicado como lugar de guardado.
SSL A partir de la versión 1200 del firmware Nexo: active la casilla de verificación SSL (Secure Sockets Layer) para transferir los datos SSL codificados.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Datos Véase Botón Datos (página 213)
Almacenamiento Véase Botón Almacenamiento (página 217)
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

212/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Tarjeta NX-SD
Ajustes Datos Standard Nexo Tarjeta NX-SD
Por medio de esta opción de menú se establece el subdirectorio para el almacenamiento de resultados de atornillado en la tarjeta MicroSD NX-SD y se define el contenido del archivo.
Los resultados de atornillado se almacenarán en la tarjeta MicroSD NX-SD en el directorio results.
HTTP
Ajustes Datos Standard Nexo HTTP
A través de esta opción de menú se establece la configuración de la conexión HTTP a la edición de re-sultados.
El firmware Nexo utiliza HTTP/estándar 1.1.
Tabla 9–58: Pestaña Tarjeta NX-SD
Elemento Descripción Activo Con la casilla de verificación seleccionada se activa el ajuste.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Datos Véase Botón Datos (página 213)
Almacenamiento Véase Botón Almacenamiento (página 217)
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Tabla 9–59: Pestaña HTTP
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la salida de datos a través
de HTTP.
Si la edición de resultados estuviese desactivada, no se editarán más datos de resultados. Los archivos de resultados, que ya se habían creado y todavía existen, se emitirán solamente tras activar otra vez la salida de datos HTTP.
Dirección IP / DNS Introduzca directamente la dirección IP del servidor HTTP o la entrada DNS del servidor HTTP.
Puerto Selección de puertos TCP/IP para la transferencia de datos, rango de valo-res 0 - 65535.
Ajuste por defecto: 8080
Page En Page introduzca la página de destino para el almacenamiento de los ar-chivos de resultados.
Agente de usuario Introduzca el agente de usuario del encabezamiento HTTP.
Ajuste por defecto: SYS3501
1. Ajuste para la transmisión al Process Quality Manager (PQM). Utilizando un PQM se pueden transmitir mediante una conexión HTTP los datos de la edición de resultados desde la unidad de control de atornillado al PQM.
Tipo de contenido Introduzca el tipo de contenido del encabezamiento HTTP.
Ajuste por defecto: aplicación/json1
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Datos Véase Botón Datos (página 213)
Almacenamiento Véase Botón Almacenamiento (página 217)
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 213/265
File Share
Ajustes Datos Standard Nexo File Share
A través de esta opción de menú se establece la configuración de la conexión File Share con la edición de resultados.
Tabla 9–60: pestaña File Share
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la emisión de datos por
medio de File Share.
Si la edición de resultados estuviese desactivada, no se editarán más datos de resultados. Los archivos de resultados, que ya se habían creado y todavía existen, se emitirán solamente tras activar otra vez la emisión de datos File Share.
Dirección IP / DNS Introduzca directamente la dirección IP del servidor File Share o la entrada DNS del servidor File Share.
ID de grupo Introduzca la ID de grupo para la conexión File Share.
La ID de grupo debe ser válida en el servidor File Share y tener derechos de escritura en el directorio de destino, así como el derecho de crear directo-rios. Si fuese el caso, consulte con el administrador del sistema si hay dere-chos de escritura para el usuario.
ID de usuario Introduzca la ID de usuario para la conexión File Share.
La ID de usuario debe ser válida en el servidor File Share y tener derechos de escritura en el directorio de destino, así como el derecho de crear direc-torios. Si fuese el caso, consulte con el administrador del sistema si hay de-rechos de escritura para el usuario.
Directorio Introduzca el directorio1 para los resultados de atornillado en el servidor File Share.
1. Se trata del directorio raíz del usuario que ha iniciado sesión. Este directorio puede estar también algunos niveles por debajo del directorio raíz real de la unidad. Si no se ha introducido directorio, se utiliza de forma automática el directorio raíz del usuario indicado como lugar de guardado.
Tipo Seleccione la clasificación de los datos de:
– NFS
Para sistemas operativos Unix y Linux.
– CIFSCIFS (Common Internet File System) para sistemas operativos Windows.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Datos Véase Botón Datos (página 213)
Almacenamiento Véase Botón Almacenamiento (página 217)
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
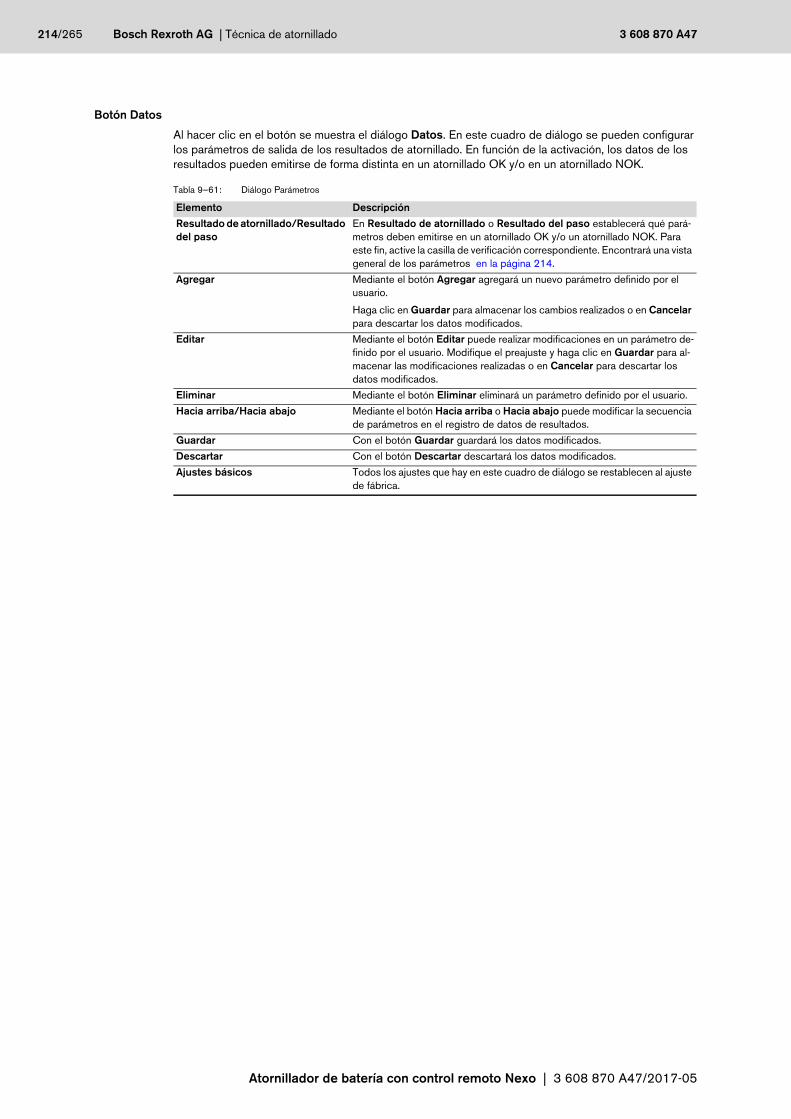
214/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Botón Datos
Al hacer clic en el botón se muestra el diálogo Datos. En este cuadro de diálogo se pueden configurar los parámetros de salida de los resultados de atornillado. En función de la activación, los datos de los resultados pueden emitirse de forma distinta en un atornillado OK y/o en un atornillado NOK.
Tabla 9–61: Diálogo Parámetros
Elemento Descripción Resultado de atornillado/Resultado del paso
En Resultado de atornillado o Resultado del paso establecerá qué pará-metros deben emitirse en un atornillado OK y/o un atornillado NOK. Para este fin, active la casilla de verificación correspondiente. Encontrará una vista general de los parámetros en la página 214.
Agregar Mediante el botón Agregar agregará un nuevo parámetro definido por el usuario.
Haga clic en Guardar para almacenar los cambios realizados o en Cancelar para descartar los datos modificados.
Editar Mediante el botón Editar puede realizar modificaciones en un parámetro de-finido por el usuario. Modifique el preajuste y haga clic en Guardar para al-macenar las modificaciones realizadas o en Cancelar para descartar los datos modificados.
Eliminar Mediante el botón Eliminar eliminará un parámetro definido por el usuario.
Hacia arriba/Hacia abajo Mediante el botón Hacia arriba o Hacia abajo puede modificar la secuencia de parámetros en el registro de datos de resultados.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 215/265
Parámetros de salida de datos de resultados
El archivo de salida se compone de los siguientes parámetros:
Figura 9–4: Formato de salida "Standard Nexo"
Parámetros generales de resultados del atornillado
A Parámetros generales de resultados del atornillado (véase la página 214)
B Datos de paso: en este archivo de resultados se archivan todos los pasos de atornillado del programa (tigh-tening steps).
B1 Parámetros del resultado del paso (véase la página 215)
B2 Parámetros de función de atornillado (tightening functions) (véase la página 216): todas las funciones de des-tino y supervisión que pertenecen al paso serán emitidos con una denominación, un valor de destino y un valor real.
B3 Parámetros de las curvas (graph) (véase la página 216): además, en cada paso también se emiten todos los puntos de curva correspondientes.
Tabla 9–62: Parámetros generales de resultados del atornillado y su significado
Parámetros Significado
date Fecha/Hora de atornillado
channel Nombre del canal
nr Número de canal
cell id ID de celdas
tool serial Número de serie del atornillador
nominal torque Par nominal del husillo del atornillador
torque unit Unidad del par de apriete
MCE factor Factor MFU del atornillador
cycle Contador de ciclos del atornillador
id code Código ID
job nr 0-255 = Número de trabajos
-1 = Trabajo inactivo o no disponible
prg nr Número del programa de atornillado
prg name Nombre del programa de atornillado
prg date Fecha de la última modificación del programa de atornillado
result Resultado total del atornillado OK/NOK
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

216/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Parámetros del resultado del paso
quality code Código de calidad
total time Tiempo total de atornillado
rework code Código de retoque
rework text Instrucciones de trabajo de retoque
last cmd Último comando de programa de atornillado de los pasos
batch nr Número del contador OK/NOK
batch direction OK 0 = sentido de contaje descendente
1 = Sentido de contaje ascendente
batch direction NOK 0 = sentido de contaje descendente
1 = Sentido de contaje ascendente
batch canceled Muestra si durante la elaboración de un registro de contador OK/NOK se cambió el registro de contador:
0 = no se cambió el contador
1 = se cambió el contador
batch max OK Valor destino contador OK
batch OK Valor actual del contador OK
batch max NOK Valor destino contador NOK
batch NOK Valor actual del contador NOK
batch valid Valor del contador OK/NOK
hardware Código del atornillador, p. ej., NXA030S-36V
mac0 Dirección MAC del atornillador
ip0 Dirección IP del atornillador
sw version Versión del software
sw build Versión build
total angle threshold nom Valor teórico de par de límite del contaje ángulo total
total angle threshold act Valor real de par de límite del contaje ángulo total
total angle Suma de ángulo total
last step column Número de columna del paso de resultado
last step row Número de fila del paso de resultado
Tabla 9–63: Parámetros del resultado del paso y su significado
Parámetros Significado
row Número de líneas del paso de atornillado
column Número de columna paso de atornillado
name Nombre del paso
category Categoría del paso de atornillado
result Resultado paso OK/NOK
last cmd Último comando de programa de atornillado del paso
speed Número de revoluciones teóricas
torque Paso par final
angle Paso ángulo final
duration Duración paso en segundos
angle threshold nom Valor teórico par de límite contaje de ángulo
angle threshold act Valor real par de límite contaje ángulo
quality code Código de calidad
step type Tipo de pasos de atornillado
Tabla 9–62: Parámetros generales de resultados del atornillado y su significado
Parámetros Significado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 217/265
Parámetros de función de atornillado
Parámetros de las curvas
Significado de los criterios de desconexión
En cada paso de atornillado se determina la causa para la finalización del paso de atornillado por medio de la llave last_cmd , esto quiere decir, el criterio de desconexión:
Tabla 9–64: Parámetros de función de atornillado y su significado
Parámetros Significado
name Nombre de la función
TF Angle: Función de destino ángulo
TF Torque: Función de destino par
TF Time: Función de destino tiempo
MFs TimeMax: Función de supervisión tiempo conectada
MFs TorqueMax: Función de supervisión par máximo conecta-da
MF TorqueMax: Función de supervisión par máximo
MFs TorqueMin: Función de supervisión par mínimo conecta-da
MF TorqueMin: Función de supervisión par mínimo
MF AngleMin: Función de supervisión ángulo mínimo
MFs AngleMax: Función de supervisión ángulo máx. conecta-da
MF AngleMax: Función de supervisión ángulo máximo
nom Valor teórico de la función
act Valor real de la función
Tabla 9–65: Parámetros de las curvas y su significado
Parámetros Significado
angle values Tabla de los valores de ángulos
torque values Tabla de los valores de los pares
time values Tabla de los valores de tiempo
points Número de puntos de las curvas
angle scale Factor de multiplicación de valores de ángulos (valor fijo: 1)
torque scale Factor de multiplicación de valores del par (valor fijo: 1)
time scale Factor de multiplicación de valores de tiempo (valor fijo: 1)
Tabla 9–66: Criterios de desconexión
Último comando Significado
TF Angle Función de destino ángulo
TF Torque Función de destino par
TF Time Función de destino tiempo
MFs TimeMax Función de supervisión de tiempo conectada
MFs TorqueMax Función de supervisión par superior conectada
MFs TorqueMin Función de supervisión de par inferior conectada
MFs AngleMax Función de supervisión ángulo máx. conectada
Cw->0 Desconexión BMS Señal Cw
Ccw->0 Desconexión BMS Señal Ccw
En->0 Desconexión BMS Señal En
SysFault Error del sistema
rdy->0 Disponibilidad operativa anulada durante el atornillado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

218/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Botón Almacenamiento
Al hacer clic en el botón se muestra el diálogo Almacenamiento. En el cuadro de diálogo puede editar o borrar los parámetros correspondientes para el almacenamiento de los datos de resultados, o bien aña-dir más parámetros de almacenamiento.
Tabla 9–67: Diálogo Memoria
Elemento Descripción Formato de salida Formato de salida de los datos de resultados.
– TipoSelección del formato de salida json.
– Con formato JSONSeleccione Sí para que los datos de resultados se emitan en un formato JSON legible (con saltos de línea y espacios). Seleccione No para obte-ner un registro de datos JSON sin formato.
Nombre del archivo Visualización al seleccionar FTP, Tarjeta NX-SD y File Share:
en Nombre del archivo puede definir el nombre del archivo para el almace-namiento de los datos de resultados. El nombre de archivo puede estar com-puesto por diferentes parámetros. Active los parámetros correspondientes. Pueden agregarse más parámetros definidos por el usuario.
Extensión del archivo Visualización al seleccionar FTP, Tarjeta NX-SD y File Share:
muestra la extensión del archivo json del almacenamiento de los datos de re-sultados.
Subdirectorio Visualización al seleccionar FTP, Tarjeta NX-SD y File Share:
en Subdirectorio se creará un subdirectorio. El nombre de archivo del sub-directorio puede estar compuesto por diferentes parámetros. Active los pa-rámetros correspondientes.
Cantidad de archivos Visualización al seleccionar Tarjeta NX-SD:
En el sistema de archivos utilizado en la tarjeta NX-SD solo se puede alma-cenar una determinada cantidad de archivos en un subdirectorio. Debido a esta limitación, en el directorio configurado se creará además un subdirecto-rio con la fecha y hora actuales (AAAA-MM-DD_hh-mm-ss) y todos los re-gistros de datos de resultados se almacenarán allí. Si se ha alcanzado la cantidad de archivos configurada, se generará de forma automática un nuevo subdirectorio con la hora y fecha actuales y los datos de resultados serán al-macenados allí.
En cada subdirectorio se pueden guardar un máximo de 10 000 registros de datos de resultados.
Agregar Mediante el botón Agregar agregará un nuevo parámetro.
Haga clic en Guardar para almacenar los cambios realizados o en Cancelar para descartar los datos modificados.
Editar Mediante el botón Editar puede realizar modificaciones en un parámetro de almacenamiento. Modifique el preajuste y haga clic en Guardar para almace-nar las modificaciones realizadas o en Cancelar para descartar los datos mo-dificados.
Eliminar Mediante el botón Eliminar eliminará un parámetro.
Hacia arriba/Hacia abajo Mediante el botón Hacia arriba o Hacia abajo puede modificar la secuencia de parámetros para la composición del nombre del archivo del subdirectorio.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Ajustes básicos Todos los ajustes que hay en este cuadro de diálogo se restablecen al ajuste de fábrica.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 219/265
9.8.4.3 Open Protocol
Ajustes Datos Open Protocol
A través de esta opción de menú se establece el ajuste para la comunicación con el Rexroth Open Pro-tocol del atornillador de batería con control remoto Nexo.
Para la conexión de datos en el sistema de atornillado 350, debe seleccionarse Rexroth Open Protocol.
Tabla 9–68: Pestaña Open Protocol
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la comunicación con el
Rexroth Open Protocol.
Puerto TCP/IP Selección de puertos TCP/IP para la transferencia de datos.
Rango de valores: 0 - 65535
Ajuste por defecto: 4545
Versión Selección del protocolo de datos Rexroth OP R1.0Keep alive timeout Selección del intervalo de tiempo en el que deben entrar los mensajes. Si du-
rante ese intervalo de tiempo no entra ningún mensaje, se produce una des-conexión.
Ajuste por defecto: 15 segundos
Response timeout Selección del intervalo de tiempo en el que debe efectuarse el aviso para la confirmación de una transmisión de datos (ajuste por defecto: 10 segundos). Este dato se requiere solamente para el modo fiable. El inter-valo de tiempo se ajustará 4 veces como máximo. Si durante el cuarto inter-valo no llega confirmación de la transmisión de datos, se produce una desconexión.
Suprimir sonido del código ID Si se ha seleccionado Open Protocol en Seleccionar aparato del menú Código ID, la activación de Suprimir sonido del código ID provoca lo si-guiente:
– Los códigos ID, a los que se llega por Open Protocol (MID 0050 o MID 0150), no se transmiten mediante Open Protocol al respectivo suscriptor del código ID (MID 0052).
– La opción (Ajuste por defecto: desactivada) previene que se creen conti-nuamente nuevos códigos ID, cuyo atornillado realmente no se está lle-vando a cabo en el lugar de atornillado.
Transmitir también los códigos ID de las fuentes no seleccionadas
Transmitir también los códigos ID de las fuentes no seleccionadas influ-ye en la suscripción del código ID que se va a transmitir (MID 0051). Si se ha activado la opción, se transfieren también los códigos ID nuevos de una fuente de código ID, p. ej., un escáner, si esa fuente no se ha configurado como aparato con código ID activo en el sistema operativo NEXO-OS.
Modo asíncrono Active el Modo asíncrono para poner en funcionamiento determinadas fun-ciones no críticas de manera asíncrona. Con ello se alcanzará una velocidad de comunicación más alta entre el sistema de atornillado y el punto solicita-do.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
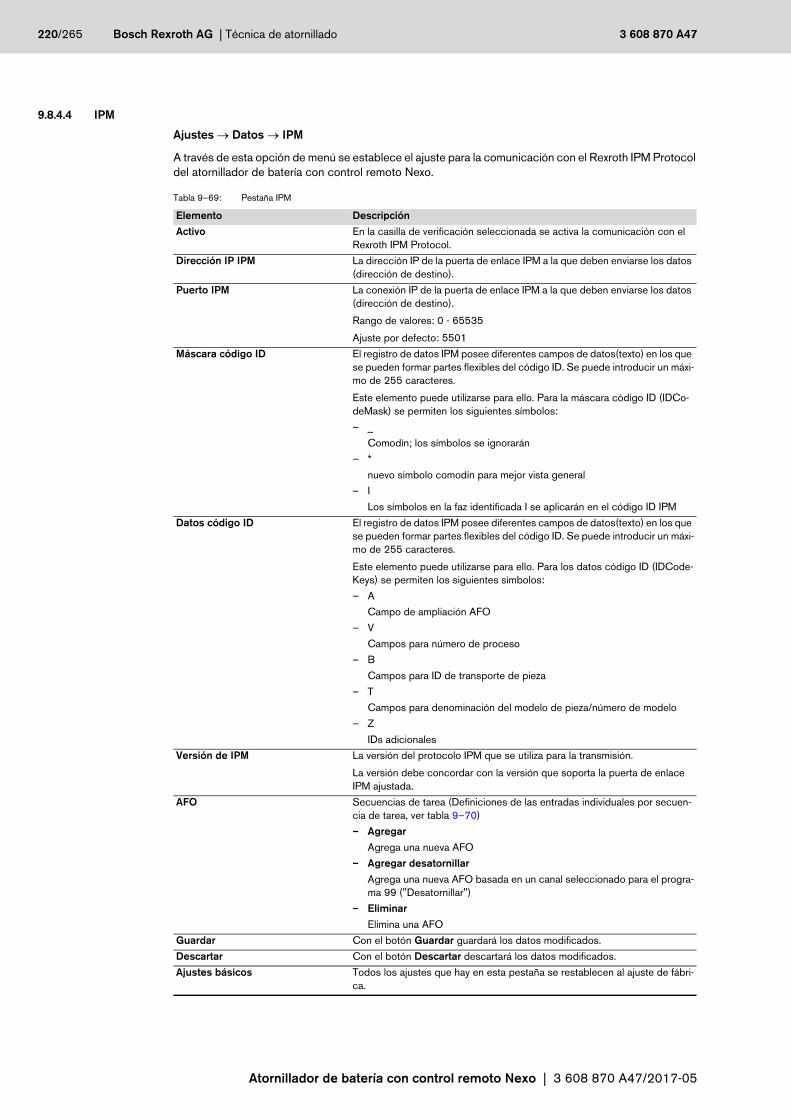
220/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.4.4 IPM
Ajustes Datos IPM
A través de esta opción de menú se establece el ajuste para la comunicación con el Rexroth IPM Protocol del atornillador de batería con control remoto Nexo.
Tabla 9–69: Pestaña IPM
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la comunicación con el
Rexroth IPM Protocol.
Dirección IP IPM La dirección IP de la puerta de enlace IPM a la que deben enviarse los datos (dirección de destino).
Puerto IPM La conexión IP de la puerta de enlace IPM a la que deben enviarse los datos (dirección de destino).
Rango de valores: 0 - 65535
Ajuste por defecto: 5501
Máscara código ID El registro de datos IPM posee diferentes campos de datos(texto) en los que se pueden formar partes flexibles del código ID. Se puede introducir un máxi-mo de 255 caracteres.
Este elemento puede utilizarse para ello. Para la máscara código ID (IDCo-deMask) se permiten los siguientes símbolos:
– _
Comodín; los símbolos se ignorarán
– *
nuevo símbolo comodín para mejor vista general
– I
Los símbolos en la faz identificada I se aplicarán en el código ID IPM
Datos código ID El registro de datos IPM posee diferentes campos de datos(texto) en los que se pueden formar partes flexibles del código ID. Se puede introducir un máxi-mo de 255 caracteres.
Este elemento puede utilizarse para ello. Para los datos código ID (IDCode-Keys) se permiten los siguientes símbolos:
– A
Campo de ampliación AFO
– V
Campos para número de proceso
– B
Campos para ID de transporte de pieza
– T
Campos para denominación del modelo de pieza/número de modelo
– Z
IDs adicionales
Versión de IPM La versión del protocolo IPM que se utiliza para la transmisión.
La versión debe concordar con la versión que soporta la puerta de enlace IPM ajustada.
AFO Secuencias de tarea (Definiciones de las entradas individuales por secuen-cia de tarea, ver tabla 9–70)
– AgregarAgrega una nueva AFO
– Agregar desatornillarAgrega una nueva AFO basada en un canal seleccionado para el progra-ma 99 ("Desatornillar")
– EliminarElimina una AFO
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Ajustes básicos Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábri-ca.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 221/265
Todas las secuencias de tarea (AFO) se representan en una fila en la tabla AFO, ver tabla 9–70. En la tabla AFO se pueden añadir AFO de forma ilimitada y se pueden eliminar.
La tabla 9–70 muestra de forma esquemática la asignación detallada de la combinación de números de canal y números de programa ("Información de proceso físico") de una secuencia de tarea ("caracterís-tica IPM lógica").
Tabla 9–70: Asignación de la combinación del número de canal y número de programa
Elemento Descripción Activo – marcado
Los datos se transmiten a la puerta de enlace IPM.
– no marcado
Los datos con ese número de canal/programa no se transmiten a la puer-ta de enlace IPM.
Casos de aplicación:
– La AFO se define, pero no se activa:
Esta opción se utiliza cuando la transmisión de los resultados debe per-manecer oculta, p. ej., procesos de desatornillado.
– El programa de atornillado no definidos en la lista AFO se atornilla:
una AFO (nombre de AFO) se genera de forma automática y el resultado de atornillado se envía a la puerta de enlace IPM, véase la nota al pie de la tabla1.
N.º de canal El número de canal puede modificarse a través del menú Ajustes - Configu-ración (página 222).
Prg Selección del número de programa para esta secuencia de tarea.
AFO Nombre de la secuencia de tarea (máximo 30 caracteres)
Caracteres permitidos: 7-Bit US-ASCII (sin signos)
Descripción Caracteres permitidos: 7-Bit US-ASCII (sin signos, máx. de 30 caracteres)
Este campo puede dejarse vacío, ya que la descripción se puede llevar a cabo más tarde en el servidor de esta AFO. En tal caso, pueden editarse más adelante, p. ej., descripciones con signos o símbolos específicos de países.
Filtro de curvas Selecciona el tipo de resultado que debe guardarse:
– Curvas OK/NOKTodas las curvas de resultados
– Curvas OKSolamente las curvas con el resultado OK
– Curvas NOKSolamente las curvas con el resultado NOK
– Ninguna curvaNinguna curva con el resultado
Curva OK Se establece la forma en la que debe transmitirse la curva al sistema IPM en caso OK.
– Último pasoRango de curva del último paso de atornillado
– Todos los pasosCurva de atornillado total
Curva NOK Se establece la forma en la que debe transmitirse la curva al sistema IPM en caso NOK.
– Último pasoRango de curva del último paso de atornillado
– Todos los pasosCurva de atornillado total
Aflojar – marcado
El rango de aflojamiento no se ha truncado
– no marcado
Se trunca el rango de aflojamiento
Ángulo absoluto Si selecciona esta opción, se calcula la curva en una representación que au-menta constante con el ángulo.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
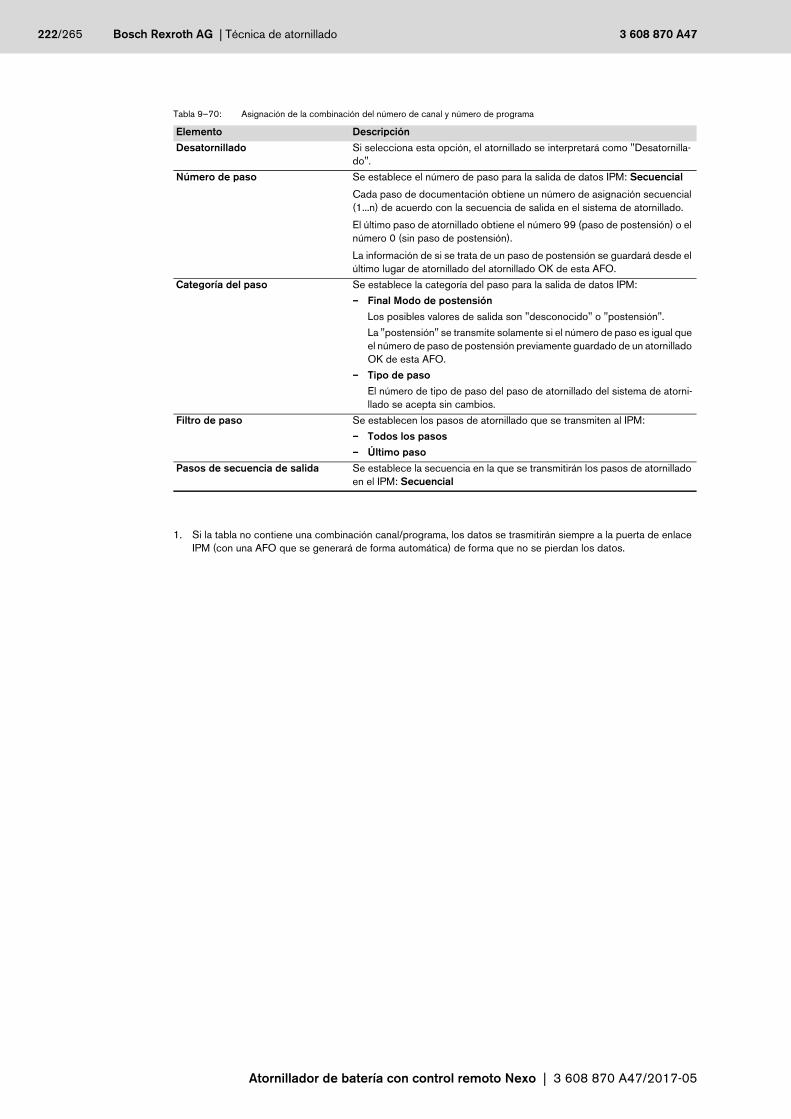
222/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Desatornillado Si selecciona esta opción, el atornillado se interpretará como "Desatornilla-do".
Número de paso Se establece el número de paso para la salida de datos IPM: Secuencial
Cada paso de documentación obtiene un número de asignación secuencial (1...n) de acuerdo con la secuencia de salida en el sistema de atornillado.
El último paso de atornillado obtiene el número 99 (paso de postensión) o el número 0 (sin paso de postensión).
La información de si se trata de un paso de postensión se guardará desde el último lugar de atornillado del atornillado OK de esta AFO.
Categoría del paso Se establece la categoría del paso para la salida de datos IPM:
– Final Modo de postensiónLos posibles valores de salida son "desconocido" o "postensión".
La "postensión" se transmite solamente si el número de paso es igual que el número de paso de postensión previamente guardado de un atornillado OK de esta AFO.
– Tipo de pasoEl número de tipo de paso del paso de atornillado del sistema de atorni-llado se acepta sin cambios.
Filtro de paso Se establecen los pasos de atornillado que se transmiten al IPM:
– Todos los pasos– Último paso
Pasos de secuencia de salida Se establece la secuencia en la que se transmitirán los pasos de atornillado en el IPM: Secuencial
1. Si la tabla no contiene una combinación canal/programa, los datos se trasmitirán siempre a la puerta de enlace IPM (con una AFO que se generará de forma automática) de forma que no se pierdan los datos.
Tabla 9–70: Asignación de la combinación del número de canal y número de programa
Elemento Descripción
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 223/265
9.8.4.5 VW-XML
Ajustes Datos VW-XML
A través de esta opción de menú se establece el ajuste para la comunicación con VW-XML del atornilla-dor de batería con control remoto Nexo.
Tabla 9–71: Pestaña VW-XML
Elemento Descripción Activo En la casilla de verificación seleccionada se activa la comunicación con VW-
XML.
Datos de la instalación En Datos de la instalación podrá configurar los parámetros correspondien-tes para la salida de resultados de atornillado VW-XML.
Ajuste por defecto de las etiquetas: vacío
– Denominación de la instalación <ABZ>En la etiqueta "ABZ" hay 32 caracteres disponibles (por ejemplo: montaje de ruedas).
– Fábrica <WRK>En la etiqueta "WRK" hay 16 caracteres disponibles.
– Segmento de producción <FSG>En la etiqueta "FSG" hay 16 caracteres disponibles.
– Tramo de producción <FAB>En la etiqueta "FAB" hay 16 caracteres disponibles.
– Área de producción <FBR>En la etiqueta "FBR" hay 16 caracteres disponibles.
– Ubicación de la instalación <ORT>En la etiqueta "ORT" hay 16 caracteres disponibles.
– Lado de conexión <ABS>Selección del lado de conexión:
– Izquierda
– Derecha
– Indefinido: vacío
En la etiqueta "ABS" hay disponible un carácter. Al seleccionar Derecha "R" y al seleccionar Izquierda "L".
Interfaz – Puerto TCP/IP A (datos de control)Selección del puerto TCP/IP deseado para el intercambio de datos
para la unidad de control de atornillado (ajuste por defecto: 4700)
– Mantener tiempo de espera activo (A)Indicación del intervalo de tiempo en que debe llegar un mensaje del PC maestro. Si no llegara un mensaje al puerto durante ese intervalo de tiem-po, finalizará la conexión (ajuste por defecto: 8 segundos).
Recomendación: Ajuste "Mantener tiempo de espera activo" de manera que este intervalo de tiempo sea mayor que aquel del PC maestro.
– Puerto TCP/IP B (datos de proceso)Selección del puerto TCP/IP deseado para el intercambio de datos de proceso y mensajes controlados por eventos (ajuste por defecto: 4710)
– Mantener tiempo de espera activo (B)Indicación del intervalo de tiempo en el que la unidad de control de ator-nillado debe enviar un mensaje al PC maestro. Si no llegara un mensaje al puerto del PC maestro durante ese intervalo de tiempo, finalizará esta conexión (ajuste por defecto: 6 segundos).
Recomendación: Ajuste "Mantener tiempo de espera activo" de manera que este intervalo de tiempo sea menor que aquel del PC maestro.
– Tiempo de espera de ACKIndicación del intervalo de tiempo en el que debe llegar una confirmación (admisión). Si no llegara un confirmación al puerto durante ese intervalo de tiempo, finalizará la conexión (ajuste por defecto: 3 segundos).
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

224/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Opciones Selección de la clase de transmisión por defecto que debe usarse para la transmisión de datos de resultados de atornillado.
– OKSelección de las clase de transmisión 1 a 5 para los datos de resultados de atornillado OK.
– NOKSelección de las clase de transmisión 1 a 5 para los datos de resultados de atornillado NOK.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Importar Abre el diálogo Importar. Seleccione el archivo que se debe importar.
Exportar Exporta los ajustes actuales en el área de descarga.
Ajustes básicos Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábri-ca.
Tabla 9–71: Pestaña VW-XML
Elemento Descripción
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 225/265
9.8.5 Configuración
Ajustes Configuración
A través de esta opción de menú se accede a la configuración del atornillador.
Para poder usar el Rexroth Open Protocol, el ID de celdas y el número de canal deben estar configurados.
Tabla 9–72: Pestaña Configuración
Elemento Descripción Atornillador – N.° de pedido
Indicador del número de pedido del atornillador
– CódigoVisualización del código del atornillador
– Número de serieIndicador del número de serie del atornillador
– Nombre del canalIntroducción del nombre de canal, máx. 100 caracteres. A partir de la versión 1100 del firmware Nexo: El nombre de canal se muestra en la barra de estado, al lado del símbolo del atornillador.
– Número de canalNúmero de canal del atornillador
– ID de celdasID de celdas del atornillador
– Unidad del parSelección de la unidad de par de giro. A partir de la versión 1200 del fir-mware Nexo puede seleccionar las unidades Ftlb, Inlb, Kpm, Kgfm y Kgm. La unidad de par de giro establecida en los programas de atornilla-do es independiente de este ajuste.
– Núm. de ident.Número para identificar el atornillador
– ComentarioIntroducción de un comentario
Factor – Factor MFUEl factor MFU sirve para adaptar el sistema de medición Nexo al sistema de medición de referencia del examen de capacidad de máquinas (MFU).
– FechaIndica cuándo se ha realizado el registro.
Próxima prueba el: – ActivadoSí: Prueba activada
No: Prueba desactivada
Si en el caso de supervisión activa se alcanzan los límites configurados de la siguiente comprobación, se establecerá la unidad de control de la señal de salida BMS del CheckTool (véase la página 81) y se registrará una entrada de error de clase 0. La señal BMS se vuelve a reponer cuando se da uno de los siguientes casos:
– CicloDato que indica en qué ciclo se debe realizar una prueba.
– FechaFecha para la próxima prueba.
Última prueba – FechaIndica cuándo se ha efectuado exactamente la prueba.
– CicloIndica en qué ciclo se ha efectuado exactamente la prueba.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
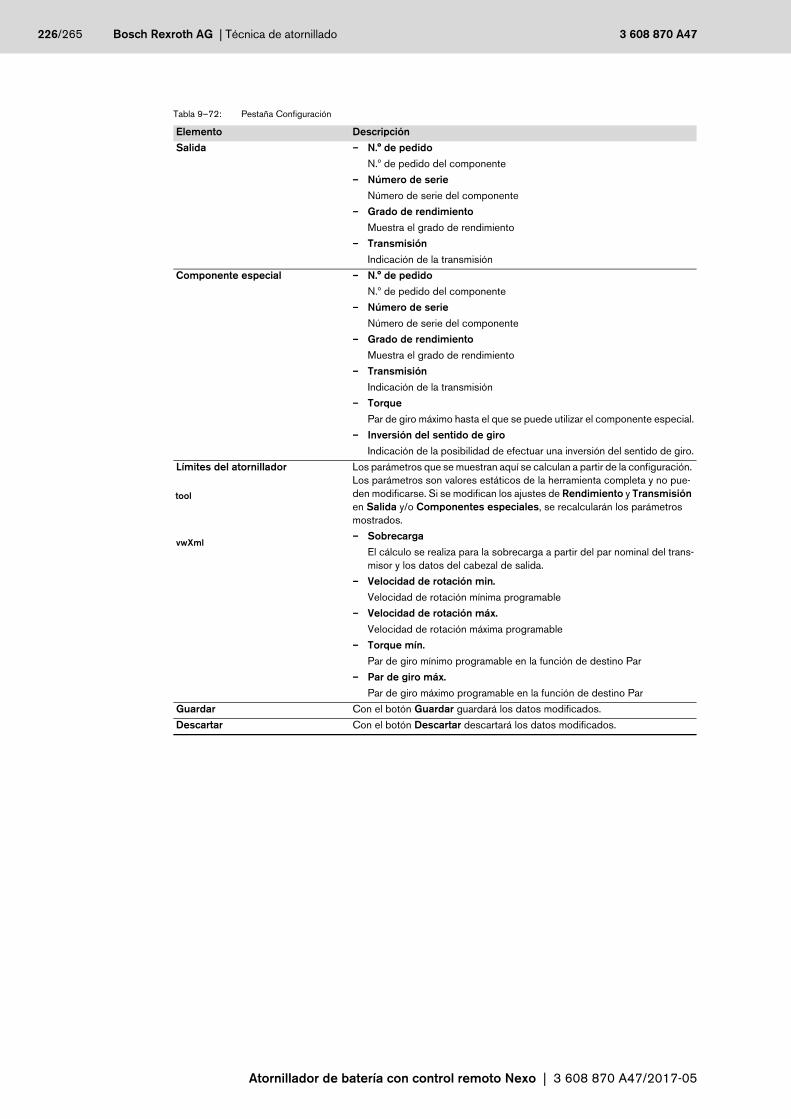
226/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Salida – N.° de pedidoN.º de pedido del componente
– Número de serieNúmero de serie del componente
– Grado de rendimientoMuestra el grado de rendimiento
– TransmisiónIndicación de la transmisión
Componente especial – N.° de pedidoN.º de pedido del componente
– Número de serieNúmero de serie del componente
– Grado de rendimientoMuestra el grado de rendimiento
– TransmisiónIndicación de la transmisión
– TorquePar de giro máximo hasta el que se puede utilizar el componente especial.
– Inversión del sentido de giroIndicación de la posibilidad de efectuar una inversión del sentido de giro.
Límites del atornillador Los parámetros que se muestran aquí se calculan a partir de la configuración. Los parámetros son valores estáticos de la herramienta completa y no pue-den modificarse. Si se modifican los ajustes de Rendimiento y Transmisión en Salida y/o Componentes especiales, se recalcularán los parámetros mostrados.
– SobrecargaEl cálculo se realiza para la sobrecarga a partir del par nominal del trans-misor y los datos del cabezal de salida.
– Velocidad de rotación min.Velocidad de rotación mínima programable
– Velocidad de rotación máx.Velocidad de rotación máxima programable
– Torque mín.Par de giro mínimo programable en la función de destino Par
– Par de giro máx.Par de giro máximo programable en la función de destino Par
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Tabla 9–72: Pestaña Configuración
Elemento Descripción
tool
vwXml
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 227/265
9.8.6 Firmware
Ajustes Firmware
En esta opción de menú se muestra la versión de firmware; además, empieza la actualización del firmwa-re.
Mediante la actualización del firmware se actualiza también el sistema operativo NEXO-OS.
A partir de la versión 1100 del firmware Nexo solo puede iniciarse una actualización de firmware cuando la capacidad del pack de baterías de inserción es 25 %.
Tras haber realizado la carga de la nueva versión de firmware, el atornillador de batería con control remoto Nexo se reiniciará. Seguidamente, ya funcionará el nuevo firmware para el atornillador de batería con con-trol remoto Nexo.
Tabla 9–73: Pestaña Firmware - Firmware
Elemento Descripción Actualizar Haga clic sobre el botón Actualizar para cargar una nueva versión de firmwa-
re:1. se abre el diálogo Actualización de firmware de atornillador;2. seleccione el archivo (*.nxfw) para efectuar la actualización de firmware; 3. mediante Cargar comenzará la actualización. Con el botón Cancelar po-
drá cancelar el proceso.
La actualización de firmware no se ejecuta o se ha cancelado:
En ese caso, vuelva a iniciar la actualización de firmware en NEXO-OS. Si la actualización de firmware sigue sin haberse ejecutado o cancelada, saque el pack de baterías de inserción del atornillador hasta que desaparezca la tensión y, a continuación, vuelva a enchufar el pack de baterías de inserción. Inicie el atornillador y espere hasta que se haya encendido. Vuelva a iniciar la actualización del firmware en NEXO-OS.
Tabla 9–74: Pestaña Firmware - Firmware y configuraciones instalados previamente
Elemento Descripción Firmware y configuraciones instala-dos previamente
Haga clic sobre el botón Inicio para cargar una versión de firmware instalada previamente y sus correspondientes configuraciones.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

228/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.7 Señales BMS
Ajustes Señales BMS
A través de esta opción de menú puede crear una tabla de asignación BMS. La tabla de asignación BMS describe la asignación de las señales BMS hacia las entradas y las salidas.
Tabla 9–75: Pestaña Señales BMS
Elemento Descripción Entradas/salidas En el área izquierda de la ventana se encuentran las señales de entrada, en
el área derecha, las señales de salida.
Señales de la unidad de control/señales de estado
La lista de señales muestra todas las señales disponibles.
– Las señales asignadas que ya no están disponibles aparecen representa-das en gris en la lista de señales.
– Cada señal de entrada se puede asignar una sola vez. Cada señal de sa-lida se puede asignar hasta un máximo de cuatro veces.
Añade una señal marcada en la lista de señales a la posición seleccionada de la lista de asignación.
Retira la señal marcada de la lista de asignación.
Señales BMS del Rexroth Open Protocol - Módulo BMS oprtcl
Señales BMS del atornillador - Módulo BMS tool
A partir de la versión 1300 del firmware Nexo: Si el atornillador se encuentra en el modo manual, ya no se pueden establecer las señales Prg0-Prg7.
Señales BMS de VW-XML - Módulo BMS vwXml
Activar Mediante el botón Activar activará las señales BMS del módulo selecciona-do.
Desactivar Mediante el botón Desactivar desactivará las señales BMS del módulo se-leccionado.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Ajustes básicos Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábri-ca.
oprtcl
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 229/265
9.8.8 Contador OK/NOK
Ajustes Contador OK/NOK
Por medio de esta opción de menú establecerá el ajuste del contador OK/NOK. El contador para los ator-nillados OK y NOK sirve para valorar una secuencia de atornillados. Cada atornillado se contará de acuer-do con su valoración. Si un contador alcanzase el valor máximo establecido, aparecería una señal de mando (CntOK o CntNOK) y, si se desease, se bloquearía el canal de atornillado.
A partir de la versión 1300 del firmware Nexo se puede seleccionar el modo de funcionamiento (modo manual o modo automático) del atornillador de batería con control remoto Nexo. Para los dos modos de funcionamiento se pueden configurar contadores OK/NOK por separado. La edición mediante Open Pro-tocol (MID 0019, MID 0020 y MID 0021) solo es posible para el contador OK/NOK del modo de funcio-namiento Automático.
Tabla 9–76: Pestaña Contador OK/NOK
Elemento Descripción Modo de funcionamiento Selección del estado operativo.
Selección de señales BMS Seleccione en Selección de señales BMS los contadores:
– Prg0 ... Prg7Los contadores se seleccionan mediante las señales de mando para la selección del programa de atornillado. A través de esto, se asigna el con-tador con el mismo número a cada programa de atornillado, es decir, la secuencia se compone de atornillados con el mismo programa de atorni-llado.
– CntSel0 ... CntSel7Los contadores se seleccionan mediante las señales de mando. La selec-ción es independiente del programa de atornillado p. ej., mediante la otra unidad de control. Dentro de la secuencia, puede utilizarse para ello pro-gramas de atornillado diferentes.
Registro de contador En Registro de contador se puede configurar un total de 255 contadores OK/NOK. Para cada contador se define un valor máximo de atornillados OK y un valor máximo de atornillados NOK.
– Mediante el botón Agregar o Eliminar puede agregar o eliminar un regis-tro de contador.
– OK/NOKDebe ajustar la dirección del recuento para saber si el contador debe ir hacia arriba o hacia abajo.
– Bloqueo al alcanzar el número OK/NOKAl alcanzar el número máximo de contadores actuales, se emite la señal de mando correspondiente (CntOK o CntNOK). Puede ajustar si el ator-nillador debe bloquearse al alcanzar el número máximo o no, o si el pro-grama de desatornillado n.º 99 debe desbloquearse o bloquearse.
Ese ajuste también atañe al cambio de contador (modificar las señales de mando Prog0 … Prog7 o CntSel0 … CntSel7). Si un contador está ac-tivo (el contador está configurado y ha contabilizado, como mínimo, un atornillado), pero no se ha alcanzado ningún valor máximo de atornillados OK o atornillados NOK, al cambiar a otro contador, siempre se estable-cerá la señal de salida BMS CntCanceled.
– Bloquear programa n.º 99 segúnajuste en función de si el programa de desatornillado n.º 99 debe blo-quearse tras un atornillado OK o tras un atornillado NOK. El programa de desatornillado n.º 99 puede bloquearse dentro de un registro de contador para uno o más atornillados OK o NOK.
Si se ha alcanzado el número configurado de atornillados OK (OK máx.) y atornillados NOK (NOK máx.) dentro de un registro de contador, ya no tendrán efecto los ajustes para Bloquear programa n.º 99 se-gún. En ese caso, se aplicará el ajuste de Bloqueo al alcanzar el número OK/NOK.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

230/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.9 Código de calidad
Ajustes Código de calidad Configuración del código de calidad
El código de calidad (QC) especifica el resultado de un atornillado. Además, en este apartado se descri-birá la causa de una valoración de NOK.
Al asignar la causa de una valoración de NOK de los procesos de atornillado de determinados códigos de calidad, es posible llevar a cabo una división en determinadas áreas. Esto puede ser útil, por ejemplo, en la evaluación de los resultados del atornillador emitidos.
*)MF = Función de supervisión
Aparte del código de calidad, la señal BMS también debe utilizar OK/NOK en la evaluación. Una función de supervisión no seleccionada en el programa de atornillado se considera OK en la asignación del có-digo de calidad.
Tabla 9–77: Ajuste básico del código de calidad
Código de calidad
Códigos de retoque
MF* NOK MF* OK Todas las demás MF*
Categoría
1 0 – todo OK Sistema
130 0 Cw = 0 OK/NOK Sistema
131 0 Ccw = 0 OK/NOK Sistema
132 0 En = 0 OK/NOK Sistema
139 0 StartUp OK/NOK Sistema
129 0 Fault OK/NOK Sistema
2 0 A+ OK/NOK Todos
4 0 A- OK Todos
8 0 T+ OK Todos
10 0 T+, A+ OK Todos
12 0 T+, A- OK Todos
16 0 T- OK Todos
18 0 T-, A+ OK Todos
20 0 T-, A- OK Todos
128 0 NOK OK/NOK Sistema
Tabla 9–78: Pestaña Códigos de calidad - MF de criterios de selección NOK
Característica DescripciónCw = 0 Cancelación desactivando la señal de inicio
Ccw = 0 Cancelación desactivando la señal de inicio
En = 0 Cancelación desactivando la señal de desbloqueo (habilitar)
StartUp Prueba de arranque NOK
Fault Cancelación por error del sistema
T+ Superar el valor límite superior de supervisión del par de giro
T- No alcanzar el valor límite inferior de supervisión del par de giro
A+ Superar el valor límite superior de supervisión del ángulo
A- No alcanzar el valor límite inferior de supervisión del ángulo
t+ Superar supervisión de tiempo
Tabla 9–79: Pestaña Código de calidad - Configuración de códigos de calidad
Elemento Descripción Agregar Abre un diálogo para agregar un código de calidad.
Editar Abre un diálogo para editar el código de calidad seleccionado.
Eliminar Elimina una entrada de la tabla de asignación del código de calidad.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 231/265
Ajustes Código de calidad Códigos de retoque
Utilizando un código de retoque se pueden comunicar al usuario los pasos necesarios para retocar un atornillado evaluado como NOK. La instrucción de trabajo de retoque puede emitirse mediante las seña-les de mando correspondientes (RC0-4).
Se ponen a su disposición de forma interna 31 códigos de retoque. Cada uno de estos códigos se puede asignar a un texto (máximo 80 caracteres). El código se emite con codificación binaria como señal de mando.
En el estado de entrega del atornillador de batería con control remoto Nexo, ningún código de retoque está asignado en la tabla de asignación del código de calidad. Se puede definir un máximo de 31 códigos de retoque. El código 0 no está definido.
Hacia arriba/Hacia abajo Al seleccionar el código de calidad, la tabla se examina de arriba abajo. En su caso, la secuencia de las entradas también es decisiva para seleccionar el código de calidad.
Con Hacia arriba o Hacia abajo se puede subir o bajar una entrada selec-cionada.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Importar Abre el diálogo Importar. Seleccione el archivo que se debe importar.
Exportar Exporta los ajustes actuales en el área de descarga.
Ajustes básicos Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábri-ca.
Tabla 9–80: Pestaña Código de calidad - Códigos de retoque
Elemento Descripción Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Importar Abre el diálogo Importar. Seleccione el archivo que se debe importar.
Exportar Exporta los ajustes actuales en el área de descarga.
Tabla 9–79: Pestaña Código de calidad - Configuración de códigos de calidad
Elemento Descripción
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

232/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.10 WLAN
Ajustes WLAN
A través de esta opción de menú, establece los ajustes de WLAN para la transferencia de datos con el atornillador de batería con control remoto Nexo.
Tabla 9–81: Pestaña WLAN
Elemento Descripción Activo El dispositivo inalámbrico está desactivado en el estado de entrega del ator-
nillador de batería con control remoto.
En la casilla de verificación seleccionada se activa el inalámbrico.
Guardar Guarde la configuración utilizando el botón.
Descartar Descarte los datos modificados utilizando el botón.
Reiniciar NEXO-OS se reinicia utilizando el botón. Puede que sea necesario reiniciar, por ejemplo, en caso de problemas en WLAN.
Tabla 9–82: Pestaña WLAN - Hardware
Elemento Descripción Modo inalámbrico La red WLAN se selecciona a través del estándar IEEE 802.11. El IEEE
802.11 describe una norma IEEE relacionada con comunicación en la red inalámbrica. Seleccione el rango de frecuencia en el modo inalámbrico.
– 802.11b/g (banda de frecuencia de 2,4 GHz)
– 802.11a (banda de frecuencia de 5 GHz)
– 802.11a/g (banda de frecuencia de 2,4 GHz y 5 GHz)
Soporta la norma IEEE 802.11 n.
Detección del país En función del país, se autorizan diferentes canales en el rango de frecuencia para WLAN. Seleccione el país de destino en Detección del país.
Compruebe en Rexroth si la certificación de redes inalámbricas ha finalizado en el país de destino.
– Europa (ETSI)1 Instituto Europeo de Normas de Telecomunicaciones (European Telecommunications Standards Institute)
– USA (FCC) Comisión Federal de Comunicaciones (Federal Communica-tions Commission)
– Australia (ACMA)– Argentina (CNC)– Brasil– Canadá (IC) Ministerio de Industria de Canadá (Industry Canada)
– China (SRRC Cert) Comité Estatal de Regulación de Radio (State Radio Regulatory Commission)
– India (WPC Cert) Sección de Planificación y Coordinación Inalámbrica (Wireless Planning and Coordination Wing)
– Malasia– México (ANCE)– Nueva Zelanda (ACMA)– Rusia– Sudáfrica (ICASA)– Corea del Sur– Tailandia (Sdoc)
1. El concepto Europa abarca los siguientes países: Andorra, Bélgica, Bosnia y Herzegovina, Bulgaria, Dinamarca, Alemania, Estonia, Finlandia, Francia, Georgia, Gibraltar (UK), Grecia, Groenlandia, Gran Bretaña, Isla de Man, Irlanda, Islandia, Italia, Jan Mayen, Jersey, Juan de Nova, Islas Vírgenes (UK), Croacia, Letonia, Liechtenstein, Lituania, Luxemburgo, Malta, Mayotte, Macedonia, Mónaco, Monte-negro, Montserrat, Países Bajos, Antillas Neerlandesas, Noruega, Austria, Islas Pitcairn (UK), Polonia, Portugal, Rumanía, San Marino, Suecia, Suiza, Eslovaquia, Eslovenia, España, Spitzbergen, Repúbli-ca Checa, Hungría, Chipre
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 233/265
En la siguiente tabla se muestra una vista general de los canales que soporta el atornillador de batería con control remoto Nexo y su uso:
N.º de canal
Frecuencia (MHz)
Europa (ETSI)/Rusia
India(Cert WPC)
Argentina/Tailandia
Malasia
1 2412 2 2417 3 2422 4 2427 5 2432 6 2437 7 2442 8 2447 9 2452
10 2457 11 2462 12 2467 13 2472 36 5180 40 5200 44 5220 48 5240
52 1 5260 DFS / TPC DFS 56 1 5280 DFS / TPC DFS 60 1 5300 DFS / TPC DFS 64 1 5320 DFS / TPC DFS
100 1 5500 DFS / TPC - DFS / TPC 104 1 5520 DFS / TPC - DFS / TPC 108 1 5540 DFS / TPC - DFS / TPC 112 1 5560 DFS / TPC - DFS / TPC 116 1 5580 DFS / TPC - DFS / TPC 120 1 5600 DFS / TPC - DFS / TPC 124 1 5620 DFS / TPC - DFS / TPC 128 1 5640 DFS / TPC - DFS / TPC 132 1 5660 DFS / TPC - 136 1 5680 DFS / TPC - 140 1 5700 DFS / TPC - 149 1 5745 - - 153 1 5765 - - 157 1 5785 - - 161 1 5805 - - 165 1 5825 - -
Soportado
- No soportado
DFS Dynamic Frequency Selection: selección dinámica de los canales por radar
TCP Transmit Power Control: ningún escaneado activo en segundo plano de estos canales1) Soportado a partir de la versión 1100 del firmware Nexo
N.º de canal
Frecuen-cia (MHz)
EE. UU. (FCC)Brasil Canadá (IC)México
China(Cert SRRC)
Australia/Nueva Zelanda
Sudáfrica Corea del Sur
1 2412 2 2417 3 2422 4 2427 5 2432 6 2437 7 2442 8 2447 9 2452
10 2457 11 2462 12 2467 - 13 2472 - 36 5180 40 5200 44 5220
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

234/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
48 5240 52 1 5260 DFS DFS / TPC DFS / TPC 56 1 5280 DFS DFS / TPC DFS / TPC 60 1 5300 DFS DFS / TPC DFS / TPC 64 1 5320 DFS DFS / TPC DFS / TPC
100 1 5500 DFS - - DFS / TPC 104 1 5520 DFS - - DFS / TPC 108 1 5540 DFS - - DFS / TPC 1121 5560 DFS - - DFS / TPC 116 1 5580 DFS - - DFS / TPC 120 1 5600 - - - DFS / TPC 124 1 5620 - - - DFS / TPC 128 1 5640 - - - DFS / TPC 132 1 5660 DFS - - -136 1 5680 DFS - - -140 1 5700 DFS - - -149 1 5745 - 153 1 5765 - 157 1 5785 - 161 1 5805 - 165 1 5825 -
Soportado
- No soportado
DFS Dynamic Frequency Selection: selección dinámica de los canales por radar
TCP Transmit Power Control: ningún escaneado activo en segundo plano de estos canales1) Soportado a partir de la versión 1100 del firmware Nexo
Tabla 9–83: Pestaña WLAN - WLAN
Elemento Descripción SSID Introduzca en SSID el SSID (identificador de conjunto de servicio) del punto
de acceso, 32 caracteres como máximo.
BSSID Active BSSID para introducir el identificador básico de conjunto de servicio (BSSID) del punto de acceso.
Tabla 9–84: Pestaña WLAN - Dirección
Elemento Descripción Nombre del host Soportado a partir de la versión 1100 del firmware Nexo:
Asignación de un nombre de red permanente, 63 caracteres como máximo. Por medio del nombre de red puede reaccionar el atornillador, por ejemplo, al acceder al sistema operativo NEXO-OS, en la lista de direcciones del na-vegador web se puede introducir el nombre de la red en lugar de la dirección IP.
Método Puede escoger entre la configuración por DHCP (protocolo de configura-ción dinámica de host) o la configuración mediante asignación de una direc-ción IP fija.
– Dirección IPAsignación de una dirección IP fija
– Máscara de subredIntroducción de la máscara de subred.
– Puerta de enlaceIntroducción de la dirección de la puerta de enlace.
– DNSIntroducción del servidor DNS.
– DHCPEl punto de acceso asigna la dirección IP (IP = protocolo de Internet). Identifica al participante en el intercambio de datos.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 235/265
Ajustes para el roaming WLAN
Se entiende por roaming el cambio de punto de acceso de un atornillador a otro que contenga los mis-mos datos de acceso.
Se utiliza el roaming cuando el alcance al punto de acceso de una aplicación no es suficiente o la ilumi-nación no alcanza todas las posiciones relevantes. En ese caso, la iluminación o el alcance aumentan estableciendo más puntos de acceso (con los mismos datos de acceso).
Para ese tipo de agrupaciones, en las redes empresariales se suelen crear redes cuyos puntos de acceso pueda gestionar de manera centralizada un controlador.
Con la función de roaming, Nexo puede cambiar entre los punto de acceso individuales sin perder la red ni tener que volver a conectarse. El roaming también acelera el cambio de punto de acceso.
Tabla 9–85: Pestaña WLAN - Seguridad
Elemento Descripción Método Seleccione el método de seguridad:
– Descodificado– WPA/WPA2 de personal– WPA/WPA2 de empresa
Con el WPA (acceso protegido WiFi) se codifica información. Así se asegura que solamente las personas autorizadas tengan acceso a la red. Con WPA2, se asigna un código individual a cada usuario. Con WPA se utiliza un código preinstalado para los usuarios en el que cada usuario recibe la misma con-traseña. WPA2 es más seguro que WPA.
Autentificación Se muestra en Método = WPA/WPA2 de empresa
Seleccione la autentificación:
– PEAP
– Ninguno– EAP-TLS– EAP-TTLS
Nombre del usuario Se muestra en Método = WPA/WPA2 de empresa
Introducción del nombre de usuario.
Contraseña Se muestra en Método = WPA/WPA2 de personal / WPA/WPA2 de em-presa
Introduzca en Contraseña la contraseña WPA, 32 caracteres como máximo. La visualización de la contraseña puede codificarse con el botón Ocultar o mostrarse como texto normal con el botón Mostrar.
Root Certificate Se muestra en Método = WPA/WPA2 de empresa
Uso de un certificado en caso de codificación.
Tenga en cuenta: la mayoría de los certificados tienen una validez, es decir, están sujetos a una fecha límite. En caso de que la hora no esté ajustada en el atornillador o haya expirado el almacenamiento temporal de la batería in-terna, la hora se debe ajustar en el atornillador antes de que este vuelva a co-nectarse a la red remota.1
1. La hora se puede ajustar en el menú Ajustes Fecha y hora del sistema operativo NEXO-OS. En caso de que ya esté configurada de manera correspondiente la entrada para la pantalla del atornillador en NEXO-OS, tam-bién se puede ajustar la hora directamente en la pantalla del atornillador en Fecha y hora.
Haga clic sobre el icono para cargar directamente el certificado raíz:1. se abre el diálogo Cargar certificado raíz;2. Seleccione el archivo.3. inicie la carga mediante el botón Cargar. Con el botón Cancelar podrá
cancelar el proceso.
TKIP Active TKIP para utilizar un protocolo de seguridad de redes inalámbricas (TKIP: protocolo de integridad de clave temporal).
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
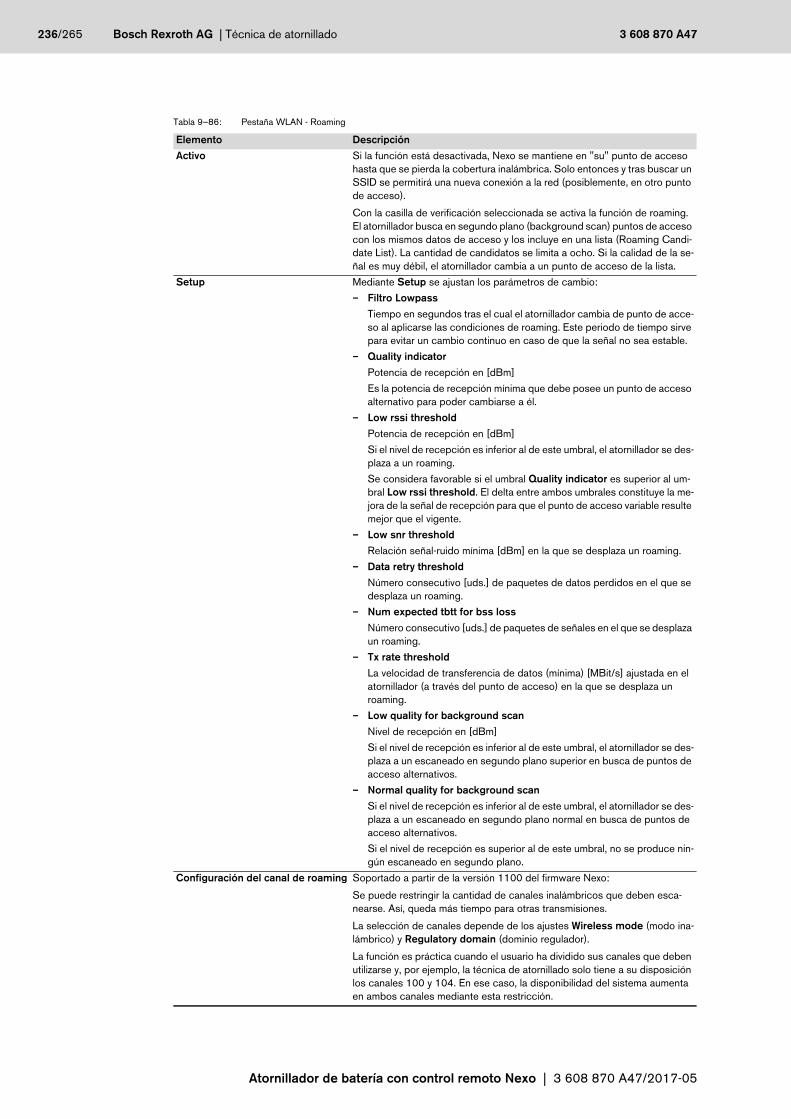
236/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Tabla 9–86: Pestaña WLAN - Roaming
Elemento Descripción Activo Si la función está desactivada, Nexo se mantiene en "su" punto de acceso
hasta que se pierda la cobertura inalámbrica. Solo entonces y tras buscar un SSID se permitirá una nueva conexión a la red (posiblemente, en otro punto de acceso).
Con la casilla de verificación seleccionada se activa la función de roaming. El atornillador busca en segundo plano (background scan) puntos de acceso con los mismos datos de acceso y los incluye en una lista (Roaming Candi-date List). La cantidad de candidatos se limita a ocho. Si la calidad de la se-ñal es muy débil, el atornillador cambia a un punto de acceso de la lista.
Setup Mediante Setup se ajustan los parámetros de cambio:
– Filtro LowpassTiempo en segundos tras el cual el atornillador cambia de punto de acce-so al aplicarse las condiciones de roaming. Este periodo de tiempo sirve para evitar un cambio continuo en caso de que la señal no sea estable.
– Quality indicatorPotencia de recepción en [dBm]
Es la potencia de recepción mínima que debe posee un punto de acceso alternativo para poder cambiarse a él.
– Low rssi thresholdPotencia de recepción en [dBm]
Si el nivel de recepción es inferior al de este umbral, el atornillador se des-plaza a un roaming.
Se considera favorable si el umbral Quality indicator es superior al um-bral Low rssi threshold. El delta entre ambos umbrales constituye la me-jora de la señal de recepción para que el punto de acceso variable resulte mejor que el vigente.
– Low snr thresholdRelación señal-ruido mínima [dBm] en la que se desplaza un roaming.
– Data retry thresholdNúmero consecutivo [uds.] de paquetes de datos perdidos en el que se desplaza un roaming.
– Num expected tbtt for bss lossNúmero consecutivo [uds.] de paquetes de señales en el que se desplaza un roaming.
– Tx rate thresholdLa velocidad de transferencia de datos (mínima) [MBit/s] ajustada en el atornillador (a través del punto de acceso) en la que se desplaza un roaming.
– Low quality for background scanNivel de recepción en [dBm]
Si el nivel de recepción es inferior al de este umbral, el atornillador se des-plaza a un escaneado en segundo plano superior en busca de puntos de acceso alternativos.
– Normal quality for background scanSi el nivel de recepción es inferior al de este umbral, el atornillador se des-plaza a un escaneado en segundo plano normal en busca de puntos de acceso alternativos.
Si el nivel de recepción es superior al de este umbral, no se produce nin-gún escaneado en segundo plano.
Configuración del canal de roaming Soportado a partir de la versión 1100 del firmware Nexo:
Se puede restringir la cantidad de canales inalámbricos que deben esca-nearse. Así, queda más tiempo para otras transmisiones.
La selección de canales depende de los ajustes Wireless mode (modo ina-lámbrico) y Regulatory domain (dominio regulador).
La función es práctica cuando el usuario ha dividido sus canales que deben utilizarse y, por ejemplo, la técnica de atornillado solo tiene a su disposición los canales 100 y 104. En ese caso, la disponibilidad del sistema aumenta en ambos canales mediante esta restricción.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 237/265
9.8.11 Codificación
Ajustes Codificación
Active el protocolo HTTPS en esta opción de menú.
El protocolo seguro de transferencia de hipertexto (HTTPS) es un protocolo de comunicación en Internet (World Wide Web) para transmitir datos confidencialmente. El protocolo HTTPS se utiliza para la codifi-cación y autenticación de la comunicación entre el servidor web de NEXO-OS y el navegador web, por ejemplo, Firefox.
El servidor web de NEXO-OS está ajustado previamente en el puerto 80 HTTP. Al activar HTTPS, el ser-vidor web de NEXO-OS se desplaza al puerto 443.
Tabla 9–87: Pestaña Codificación
Elemento Descripción Utilizar HTTPS Con la casilla de verificación seleccionada puede activar el protocolo HT-
TPS.
Tenga en cuenta: el uso de HTTPS es significativamente más lento que HTTP y, posiblemente, muestra mensajes de advertencia debido a la falta de certificados firmados.
Guardar Guarde el ajuste utilizando el botón. La modificación se aplica en cuanto vuelva a iniciar el servidor web de NEXO-OS. En el aviso de seguridad que se muestra puede almacenar las modificaciones y reiniciar.
Descartar Descarte el ajuste utilizando el botón.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

238/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.12 LED
Ajustes LED
En esta opción de menú puede establecer los colores para los distintos estados del atornillador y la in-tensidad de iluminación para el lugar de atornillado del atornillador manual.
Tabla 9–88: Pestaña LED
Elemento Descripción Activo Con la casilla de verificación seleccionada, active los ajustes que ha selec-
cionado abajo para la iluminación de lugares de atornillado (compuesta por un LED de iluminación y un LED de señal) en el atornillador manual.
Antes del proceso de atornillado Con la casilla de verificación seleccionada y antes del atornillado, active la iluminación del lugar de atornillado conforme al modo de activación.
– Iluminación LEDIntensidad: Utilice el control deslizante para definir el brillo del LED de ilu-minación.
– LED de señalRGB: Utilice el control deslizante para definir el color de la señal LED en el espacio de color RGB (rojo, verde y azul).
– Retardo de desconexiónAjuste del retardo que debe haber entre que se suelta el interruptor de encendido y se desconecta la iluminación del lugar de atornillado. Los va-lores posibles oscilan entre 0 y 30 segundos.
– Ciclo de intermitencia
Ajuste del ciclo de intermitencia de la iluminación del lugar de atornillado.
– Modo de activaciónInterruptor de arranque: La iluminación del lugar de atornillado se encien-de al apretar el interruptor de encendido.
Durante el proceso de atornillado Con la casilla de verificación seleccionada, active la iluminación del lugar de atornillado durante el atornillado.
– Iluminación LEDIntensidad: Utilice el control deslizante para definir el brillo del LED de ilu-minación.
– LED de señalRGB: Utilice el control deslizante para definir el color de la señal LED en el espacio de color RGB (rojo, verde y azul).
– Retardo de desconexiónAjuste del retardo que debe haber entre que se suelta el interruptor de encendido y se desconecta la iluminación del lugar de atornillado. Los va-lores posibles oscilan entre 0 y 30 segundos. Este ajuste solo estará activo en "Juego en el interruptor de arranque".
– Ciclo de intermitenciaAjuste del ciclo de intermitencia de la iluminación del lugar de atornillado. Este ajuste solo estará activo en "Juego en el interruptor de arranque".
Resultado de OK Con la casilla de verificación seleccionada, active la iluminación del lugar de atornillado en un atornillado OK.
– Iluminación LEDIntensidad: Utilice el control deslizante para definir el brillo del LED de ilu-minación.
– LED de señalRGB: Utilice el control deslizante para definir el color de la señal LED en el espacio de color RGB (rojo, verde y azul).
– Retardo de desconexiónAjuste del retardo que debe haber entre que se reciben los resultados y se desconecta la iluminación del lugar de atornillado. Los valores posibles oscilan entre 0 y 30 segundos.
– Ciclo de intermitenciaAjuste del ciclo de intermitencia de la iluminación del lugar de atornillado.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 239/265
Resultado de NOK Con la casilla de verificación seleccionada, active la iluminación del lugar de atornillado en un atornillado NOK.
– Iluminación LEDIntensidad: utilice el control deslizante para definir el brillo del LED de ilu-minación.
– LED de señalRGB: Utilice el control deslizante para definir el color de la señal LED en el espacio de color RGB (rojo, verde y azul).
– Retardo de desconexiónAjuste del retardo que debe haber entre que se reciben los resultados y se desconecta la iluminación del lugar de atornillado. Los valores posibles oscilan entre 0 y 30 segundos.
– Ciclo de intermitenciaAjuste del ciclo de intermitencia de la iluminación del lugar de atornillado.
Error del sistema Con la casilla de verificación seleccionada, active la iluminación del lugar de atornillado en caso de error del sistema.
– Iluminación LEDIntensidad: utilice el control deslizante para definir el brillo del LED de ilu-minación.
– LED de señalRGB: Utilice el control deslizante para definir el color de la señal LED en el espacio de color RGB (rojo, verde y azul).
– Ciclo de intermitenciaAjuste del ciclo de intermitencia de la iluminación del lugar de atornillado.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Tabla 9–88: Pestaña LED
Elemento Descripción
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

240/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.13 Asignación de ID
Ajustes Asignación de ID
Se puede vincular el código ASCII con un programa de atornillado o un trabajo, es decir, al cargar el có-digo, se iniciará el programa de atornillado o el trabajo correspondientes. Establezca los ajustes en la ta-bla de asignación de ID.
La configuración del modo de funcionamiento correspondiente se lleva a cabo en la pestaña Modo. Se-leccione en el Paso de código ID de Selección de destino Entrada de ID que se debe seleccionar un programa de atornillado o un trabajo por medio de la tabla de asignación de ID.
9.8.14 Escáner
Ajustes Escáner
A través de esta opción de menú establecerá la configuración del escáner integrado en el atornillador manual.
Ajustes Escáner Configuración del escáner
Tabla 9–89: Pestaña Asignación de ID
Elemento Descripción Tabla de asignación de ID A través de esta opción de menú modificará la tabla de asignación de ID.
– ASCIIEntrada de los caracteres ASCII del código para seleccionar un progra-ma de atornillado o trabajo.
– ProgramaCon la casilla de verificación seleccionada se activa el programa de ator-nillado.
– TrabajoCon la casilla de verificación seleccionada se activa el trabajo.
– N.ºEntrada del número de programa de atornillado o el número de trabajo. Los caracteres admitidos son valores enteros entre 0 y 255.
– ComentarioIntroducción de un comentario.
Agregar Agrega una entrada nueva en la tabla de asignación de ID.
Eliminar Elimina una entrada de la tabla de asignación de ID.
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Importar Abre el diálogo Importar. Seleccione el archivo que se debe importar.
Exportar Exporta los ajustes actuales en el área de descarga.
Ajustes básicos Todos los ajustes que hay en esta pestaña se restablecen al ajuste de fábri-ca.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 241/265
Tabla 9–90: Pestaña Escáner - Configuración del escáner
Elemento Descripción Activo Con la casilla de verificación seleccionada se activa el escáner de códigos
de barras.
Códigos de barras En la tabla 9–91 dispone de una vista general de los códigos de barras ad-mitidos.
Para la longitud del tipo de código de barras existen varias opciones:
– L1Entrada de una longitud fija, p. ej., „L1=12“
– L1;L2Entrada de dos longitudes fijas, p. ej., "L1=16;L2=8"
– L1-L2Entrada de un margen de longitud, p. ej., „L1=3–L2=9“
– CualquieraSin limitación de longitud
Guardar Con el botón Guardar guardará los datos modificados.
Descartar Con el botón Descartar descartará los datos modificados.
Tabla 9–91: Tipos de códigos de barras admitidos
Tipo de código de barras Longitud OpciónCode 128 UCC/EAN128
ISBT 128
Code 39 – L1
– L1;L2
– L1-L2
– Cualquiera
Trioptic Code
Convert to Code 32 (Italian Pharma Code)
Code 32 Prefix
Check Digit Verification
Transmit Digit Verification
Full ASCII
Code 93 – L1
– L1;L2
– L1-L2
– Cualquiera
Code 11 – L1
– L1;L2
– L1-L2
– Cualquiera
Check Digit Verification
Transmit Digit Verification
Interleaved 2 of 5 – L1
– L1;L2
– L1-L2
– Cualquiera
Check Digit Verification
Check Digit
2 of 5 to EAN-13
Codebar – L1
– L1;L2
– L1-L2
– Cualquiera
CLSI Editing
NOTIS Editing
MSI – L1
– L1;L2
– L1-L2
– Cualquiera
Check Digit
Transmit Check Digit
Check Digit Algorithm
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
242/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.8.15 Por defecto
Ajustes Por defecto
Mediante esta opción de menú se pueden restablecer todos los ajustes del atornillador de batería con control remoto Nexo al estado de entrega.
9.8.16 Backup/Restore
Ajustes Copia de seguridad/restaurar
Con la función Exportar puede elaborar copias de seguridad y guardarlas en un soporte de datos o en la tarjeta MicroSD NX-SD insertada en el atornillador. Aparte de la configuración del atornillador actual (ajustes en Ajustes Configuración), se guardan todos los ajustes y programas.
Puede importar los datos seleccionados de una copia de seguridad con la función Importar.
Tabla 9–92: Pestaña Por defecto
Elemento Descripción Ajustes básicos Mediante el botón Ajustes básicos se pueden restablecer todos los ajustes
a los ajustes básicos.
Descartar Con el botón Descartar descartará los datos modificados.
Tabla 9–93: Pestaña Copia de seguridad/restaurar - Exportar
Elemento Descripción Exportar a archivo Guardar los datos en un soporte de datos.
La extensión *.cfg se ha definido de manera fija. Asigne un nombre de archivo claro para que pueda distinguirlo.
Exportar a tarjeta NX-SD Guardar datos en la tarjeta MicroSD NX-SD insertada en el atornillador.
A partir de la versión 1100 del firmware Nexo puede seleccionar en una lista las configuraciones que se van a importar.
Tabla 9–94: Pestaña Backup/Restore - Importar
Elemento Descripción Seleccionar archivo *.nxcfg local Cargar datos guardados desde el archivo.
Seleccionar archivo *.nxcfg de la tarjeta NX-SD
Cargar datos guardados desde la tarjeta MicroSD NX-SD insertada en el atornillador.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 243/265
9.9 Diagnóstico
El menú Diagnóstico contiene las siguientes opciones de menú:
• Información del sistema (página 242)
• Visor de eventos (página 242)
• Libro de registro (página 242)
• Estado (página 243)
• Error del sistema (página 243)
• Registro de servidor web (página 244)
• Copia de pantalla (página 244)
• Red (página 244)
• Protocolo de exportación (página 245)
9.9.1 Información del sistema
Diagnóstico Información del sistema
A través de esta opción de menú se muestra información sobre el hardware y el software del atornillador de batería con control remoto Nexo:
• Hardware
Información sobre el hardware: Nombre, plataforma y dirección IP
• Software
Información sobre la versión del sistema operativo
9.9.2 Visor de eventos
Diagnóstico Visor de eventos
Mediante esta opción de menú se muestran las últimas entradas del mecanismo de registro interno del sistema.
9.9.3 Libro de registro
Diagnóstico Libro de registro
A través de esta opción de menú se muestran las últimas modificaciones en el sistema operativo. El indi-cador está limitado a 500 entradas. El registro se organiza con almacenamiento en anillo con lo que una entrada nueva sobrescribe siempre a la anterior.
Algunas opciones de menú no se muestran de manera predeterminada. La visualización de las opciones de menú se ajusta en la administración de usuarios (menú Cuentas de usuario Autorizaciones).
Tabla 9–95: Pestaña Información del sistema
Elemento Descripción Actualizar Actualiza el indicador de las entradas.
Tabla 9–96: Pestaña Visor de eventos
Elemento Descripción Actualizar Actualiza el indicador de las entradas.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

244/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.9.4 Estado
Diagnóstico Estado
En esta vista se muestran los estados de los componentes del sistema más importantes para el funcio-namiento. Si los valores de Solicitado y Actual están establecidos en "1", no es necesario realizar nin-guna comprobación. Si el valor de Actual aparece a "0", es necesario realizar una comprobación del componente y el sistema no está preparado. Entonces, la señal BMS Rdy está en "0". Si se cumplen todos los estados previstos, la señal BMS Rdy es "1".
9.9.5 Error del sistema
Diagnóstico Error del sistema
A través de esta opción se muestra la lista de errores.
• Pestaña Lista de errores
Lista de errores que han aparecido
• Pestaña Estadística
Lista de todos los errores de la respectiva lista de errores clasificada por frecuencia
La pestaña Lista de errores contiene la siguiente información:
La pestaña Estadística contiene la siguiente información:
Tabla 9–97: Pestaña Rregistro
Elemento Descripción Actualizar Actualiza el indicador de las entradas.
Borrar todo Elimina todas las entradas.
Tabla 9–98: Pestaña Estado
Elemento Descripción Solicitar Con el botón Solicitar se actualiza la lista de errores si se ha establecido una
conexión con el sistema operativo (no se lleva a cabo una actualización au-tomática permanente).
Tabla 9–99: Pestaña Lista de errores
Elemento Descripción ID Número de orden del error.
Fecha Fecha y hora en las que apareció el error
Código Código de error (interno)
Descripción Describe de qué error se trata, véase (página 256).
Clase Clase de error
Ack Indica en los errores de las clases 1 y 4 si el error persiste (0 = error presen-te, sin confirmar). En los errores de las clases 3 y 5 se indica aquí si se ha tomado nota (= confirmado) de un error (1 = confirmado, 0 = no confirmado).
Actualizar Con el botón Solicitar se actualiza la lista de errores si se ha establecido una conexión con el sistema operativo (no se lleva a cabo una actualización au-tomática permanente).
Borrar todo Con el botón Eliminar se borra la lista de errores.
Confirmar Con el botón Confirmar se confirma que se ha tomado nota de un error de la clase de error 3.
Tabla 9–100: Pestaña Estadística
Elemento Descripción Tasa de error Frecuencia del error que aparece.
Código Código de error (interno)
Descripción Describe de qué errores se trata.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 245/265
9.9.6 Registro de servidor web
Diagnóstico Registro de servidor web
En esta opción de menú se muestran errores del servidor web de NEXO-OS.
9.9.7 Copia de pantalla
Diagnóstico Copia de pantalla
A través de esta opción de menú tiene la posibilidad de crear una captura de pantalla de la pantalla del atornillador.
9.9.8 Red
Mediante la siguiente opción de menú puede realizar un diagnóstico de la red:
• WLAN (página 244)
• Ping (página 244)
• Datos TCP (página 245)
• Búsqueda de clientes (página 245)
9.9.8.1 WLAN
Diagnóstico Red WLAN
Si sospecha que hay errores en la zona WLAN, encontrará la información en esta opción de menú.
9.9.8.2 Ping
Diagnóstico Red Ping
Mediante esta opción de menú puede comprobar si se puede acceder a un determinado cliente en la red IP.
Tabla 9–101: Pestaña Servidor web
Elemento Descripción Detalle Muestra información detallada del error.
Actualizar Actualiza el indicador de las entradas.
Borrar todo Elimina todas las entradas.
Tabla 9–102: Pestaña Copia de pantalla
Elemento Descripción Actualizar Actualiza el indicador de la pantalla de atornillado en NEXO-OS.
Guardar Con este botón guardará la captura de pantalla de la pantalla del atornillador.
Tabla 9–103: Pestaña WLAN
Elemento Descripción Actualizar Actualiza el indicador.
Tabla 9–104: Pestaña Ping
Elemento Descripción Ping En Ping introduzca la dirección IP del cliente para el que se debe comprobar
la accesibilidad.
Mostrar salida Active la casilla de verificación para mostrar los paquetes de datos transmi-tidos entre la dirección de destino y el emisor.
Inicio Comience la comprobación con el botón Inicio.
Parada Detenga la comprobación con el botón Parada.
Eliminar Borre la comprobación con el botón Eliminar.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

246/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
9.9.8.3 Datos TCP
Diagnóstico Red Datos TCP
Mediante esta opción de menú puede realizar una evaluación del tráfico en la red de Open Protocol.
9.9.8.4 Búsqueda de clientes
Diagnóstico Red Búsqueda de clientes
Mediante esta opción de menú puede buscar otros clientes en la misma subred.
Los clientes que ha encontrado se mostrarán en la parte inferior de la pestaña.
9.9.9 Protocolo de exportación
Diagnóstico Protocolo de exportación
En esta opción de menú puede elaborar un informe de diagnóstico y guardarlo en un soporte de datos o en la tarjeta MicroSD NX-SD introducida en el atornillador. En caso de error, envíe este informe de diag-nóstico al Servicio técnico Rexroth.
Tabla 9–105: Pestaña Datos TCP
Elemento Descripción Datos TCP En Datos TCP seleccione la entrada Open Protocol. Duración de registro Seleccione un intervalo de tiempo durante el cual debe evaluarse el tráfico
en la red.
Inicio Comience la evaluación con el botón Inicio.
Parada Detenga la evaluación con el botón Parada.
Eliminar Borre la evaluación con el botón Eliminar.Exportar Exporte el resultado de la evaluación al área de descarga con el botón Ex-
portar (archivo *.cap). El análisis de la evaluación puede realizarse, por ejem-plo, con el programa Wireshark.
Tabla 9–106: Pestaña Búsqueda de clientes
Elemento Descripción Red En Red introduzca los primeros tres bytes de la red, es decir, xxx.xxx.xxx (xxx
= 0 - 255).
Dirección de inicio/Dirección de parada
Último byte para el rango de búsqueda. Se buscarán los clientes que se en-cuentren en este intervalo de dirección entre la dirección de inicio y la di-rección de parada.
Inicio Comience la búsqueda con el botón Inicio.
Parada Detenga la búsqueda con el botón Parada.
Tabla 9–107: Pestaña Exportar
Elemento Descripción Exportar a archivo Guarde los datos en un soporte de datos utilizando este botón.
La extensión *.zip está fijada de forma predeterminada. Asigne un nombre de archivo claro para que pueda distinguirlo.
Exportar a tarjeta NX-SD Guardar datos en la tarjeta MicroSD NX-SD insertada en el atornillador. Solo es posible si en el atornillador hay insertada una tarjeta MicroSD NX-SD.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 247/265
9.10 Menú ayuda
Si una tarjeta MicroSD NX-SD está insertada en el atornillador de batería con control remoto Nexo, podrá acceder a la tarjeta MicroSD, así como a la documentación y la información de la licencia mediante el menú Ayuda.
Ayuda Acceso a la tarjeta SD
Ayuda Documentación
Tabla 9–108: Menú Ayuda - Acceso a la tarjeta MicroSD
Elemento Descripción Vista Abra la carpeta o los datos seleccionados utilizando este botón.
Descargar Descargue los datos seleccionados utilizando este botón.
Cargar Guarde datos en la tarjeta MicroSD NX-SD utilizando este botón.
Actualizar Actualice la vista con este botón.
Tabla 9–109: Menú Ayuda - Documentación
Elemento Descripción Vista Abra el documento seleccionado utilizando este botón.
Descargar Descargue el documento seleccionado utilizando este botón.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

10 Proceso de apriete
En este capítulo se describen los procesos más importantes en la técnica de atorni-llado para el atornillador de batería con control remoto Nexo.
• Vista general (página 248)• Proceso de apriete con par de apriete controlado (página 249)• Proceso de apriete con ángulo de giro controlado (página 250)

248/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
10.1 Vista general
A continuación se indican los procesos de apriete más importantes actualmente en la técnica de atorni-llado. Con las etapas de los programa de atornillado descritas en el capítulo Sistema operativo NEXO-OS (véase la página 173) se pueden programar todos los procesos estándar así como procesos espe-ciales.
Dentro de los procesos estándar están:
• Proceso de apriete con par de apriete controlado (véase la página 249)
• Proceso de apriete con ángulo de giro controlado (véase la página 250)
Además de los procesos estándar se pueden programar procesos especiales. Están indicados con:
• Combinación de distintos procesos estándar
• Ejecución de ciclos de atornillado definidos (desarrollo de atornillado de varias etapas) para adaptar el proceso de atornillado al atornillado (p. ej., adaptación de la velocidad).
Cuentan como procesos de atornillado especial entre otros:
• Procesos de desatornillado/atornillado
• Proceso de atornillado de rosca cortante
• Atornillado de tuercas de bloqueo/apriete
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05
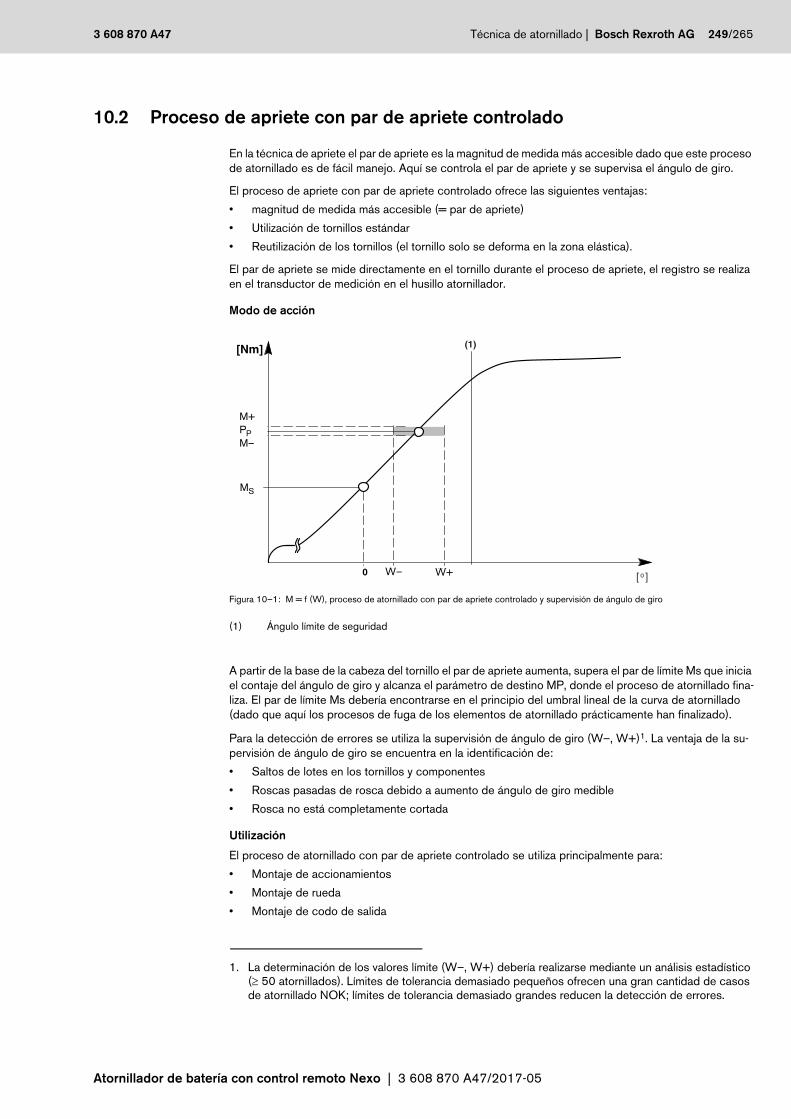
3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 249/265
10.2 Proceso de apriete con par de apriete controlado
En la técnica de apriete el par de apriete es la magnitud de medida más accesible dado que este proceso de atornillado es de fácil manejo. Aquí se controla el par de apriete y se supervisa el ángulo de giro.
El proceso de apriete con par de apriete controlado ofrece las siguientes ventajas:
• magnitud de medida más accesible (= par de apriete)
• Utilización de tornillos estándar
• Reutilización de los tornillos (el tornillo solo se deforma en la zona elástica).
El par de apriete se mide directamente en el tornillo durante el proceso de apriete, el registro se realiza en el transductor de medición en el husillo atornillador.
Modo de acción
Figura 10–1: M = f (W), proceso de atornillado con par de apriete controlado y supervisión de ángulo de giro
A partir de la base de la cabeza del tornillo el par de apriete aumenta, supera el par de límite Ms que inicia el contaje del ángulo de giro y alcanza el parámetro de destino MP, donde el proceso de atornillado fina-liza. El par de límite Ms debería encontrarse en el principio del umbral lineal de la curva de atornillado (dado que aquí los procesos de fuga de los elementos de atornillado prácticamente han finalizado).
Para la detección de errores se utiliza la supervisión de ángulo de giro (W–, W+)1. La ventaja de la su-pervisión de ángulo de giro se encuentra en la identificación de:
• Saltos de lotes en los tornillos y componentes
• Roscas pasadas de rosca debido a aumento de ángulo de giro medible
• Rosca no está completamente cortada
Utilización
El proceso de atornillado con par de apriete controlado se utiliza principalmente para:
• Montaje de accionamientos
• Montaje de rueda
• Montaje de codo de salida
(1) Ángulo límite de seguridad
1. La determinación de los valores límite (W–, W+) debería realizarse mediante un análisis estadístico ( 50 atornillados). Límites de tolerancia demasiado pequeños ofrecen una gran cantidad de casos de atornillado NOK; límites de tolerancia demasiado grandes reducen la detección de errores.
[Nm]
W– W+
MzMo
Mu
Ms
0
(1)
[ ] o
M+PPM–
MS
W– W+
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

250/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
10.3 Proceso de apriete con ángulo de giro controlado
En este proceso se controla el ángulo de giro y se supervisa el par de apriete. Aquí el tornillo se deforma continuamente.
El proceso de apriete con ángulo de giro controlado ofrece las siguientes ventajas:
• Minimización del esparcimiento de la fuerza de tensión previa, esto quiere decir factor de apriete1 cercano a 1
• Se puede alcanzar una firmeza especialmente elevada de la unión atornillada
El registro del ángulo de giro se realiza en el transductor de medición.
Modo de acción
Figura 10–2: M = f (W), proceso de atornillado con supervisión de ángulo de giro y par de apriete controlado
A partir de la base de la cabeza del tornillo el par de apriete aumenta hasta que alcanza el par de límite Ms (par de apriete controlado). Ms debería encontrarse en el principio del umbral lineal de la curva de atornillado (dado que aquí los procesos de fuga de los elementos de atornillado prácticamente han fina-lizado). A partir de par de límite Ms se continua girando hasta un ángulo de giro definido (ángulo de aprie-te) hasta que se alcanza el parámetro de destino WP.
1. Factor de apriete = FMmax/FMmin = esparcimiento de la fuerza de tensión previa de montaje (fuerza de apriete).
(1) Par de límite de seguridad
(2) Ángulo de apriete
M–
M+
[Nm]
Ms
Wz0
(1)
(2)
[ ] o
Ms
WP
M+
M–
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 251/265
Para la detección de errores se utiliza la supervisión de par de apriete (M–, M+)1. Su ventaja radica en la identificación de:
• Saltos de lotes en los tornillos y componentes
• Tornillos y componentes defectuosos
En estos procesos, el tornillo se expande por encima de su límite de estiramiento hasta el umbral de la deformación plástica. Debido al estrechamiento transversal, la reutilización de los tornillos es limitada. Por esto para estos procesos deben utilizarse tornillos especiales con un poder de deformación suficiente (p. ej., tornillos de expansión).
1. La determinación de los valores límite (P–, P+) debería realizarse mediante un análisis estadístico ( 50 atornillados). Límites de tolerancia demasiado pequeños ofrecen una gran cantidad de casos de atornillado NOK; límites de tolerancia demasiado grandes reducen la detección de errores.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

252/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

11 Tratamiento de errores
Este capítulo describe errores que aparecen al utilizar el atornillador de batería con control remoto Nexo y ofrece consejos para intervenir.
• Clases de código de error y clases de error (página 254)• Detección de errores y confirmación con el sistema operativo NEXO-OS
(página 255)• Lista completa de errores (página 256)• Sustitución de componentes defectuosos (página 259)• Reducción de la alimentación eléctrica al cambiar la batería (página 259)

254/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
11.1 Clases de código de error y clases de error
11.1.1 Vista general
Los errores en el atornillador de batería con control remoto Nexo se muestran mediante:
• La pantalla gráfica en el atornillador de batería con control remoto Nexo
• El sistema operativo NEXO-OS del atornillador de batería con control remoto Nexo
• Señal de mando BMS
Después de ser eliminados, todos los errores que hayan aparecido deben confirmarse para que el ator-nillador vuelva a estar listo para su funcionamiento. La confirmación se realiza a través de:
• La lista de errores en el sistema operativo NEXO-OS (véase la página 255)
• desconexión/conexión del atornillador (aviso: Después de extraer el pack de batería insertable hay que esperar unos 20 segundos antes de volver a introducirlo.)
• Señales de mando
• Autoconfirmación (solo en caso de errores de clase 4).
11.1.2 Tabla de asignación de código de error
Se adjunta una lista de códigos de error y los textos de error correspondientes en formato PDF. Encon-trará todos los códigos de error en una lista de errores (véase Lista completa de errores a partir de la página 256).
La tabla de asignación de código de error tiene la siguiente estructura:
Encontrará la descripción detallada de las señales de mando en el capítulo Señales de mando a partir de la página 73.
Tabla 11–1: Descripción de la tabla de asignación de códigos de error
Título de la columna DescripciónCódigo de error Número de error inequívoco
Descripción Texto de error, parcialmente con indicación de el componente afectado
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 255/265
11.1.3 Clases de error
Los errores en el sistema del atornillador de batería con control remoto Nexo se dividen en las siguientes clases:
11.2 Detección de errores y confirmación con el sistema operativo NEXO-OS
El menú Diagnóstico del sistema operativo NEXO-OS ofrece una serie de posibilidades de diagnóstico.
11.2.1 Listas de errores
Para delimitar de manera rápida y sencilla la causa del error, se escriben los datos correspondientes del sistema de atornillado en listas de errores. Así, el sistema de atornillado registra de forma demostrable los errores en el hardware y el software, los errores de configuración, las averías, etc.
El indicador está limitado a 512 entradas. La lista de errores se organiza como un almacenamiento en anillo, de modo que una entrada nueva sobrescribe siempre a la anterior.
El menú Diagnóstico Error del sistema muestra en la pestaña Lista de errores la información sobre los estados de error, véase el apartado Error del sistema en la página 243.
En la pestaña Estadística se muestran todos los errores de la lista de errores correspondiente ordenados por su frecuencia, véase el apartado Error del sistema en la página 243.
11.2.2 Error WLAN
Si sospecha que hay errores en la zona WLAN, en el menú Ajustes WLAN encontrará información acerca del hardware y las conexiones del punto de acceso.
Preste atención al indicador LED en el punto de acceso, véase manual de instrucciones.
Tabla 11–2: Clases de error
Clase de error
Tipo de error Intervención
0*
*. Los errores de la clase de error 0 no se muestran en la estación remota para el Open Protocol (véase „Rexroth Open Protocol” a partir de la página 91), el así denominado "Open Interface".
Mensaje del sistema (no un error), p. ej., se ha al-canzado el intervalo de prueba.
No es necesaria intervención
1 Esta clase de error indica la existencia de un error muy grave; debido a esto el atornillador no está listo para funcionar, es decir, no es posible el atornillado. Este error puede estar causado p. ej., porque:
– Falta configuración
– Los componentes del hardware han dejado de funcionar
El atornillador solo puede volver a su estado funcio-nal mediante la ayuda del utilizador, p. ej.:
– El envío de la configuración correcta
– La extracción del pack de batería de inserción, esperar 20 segundos, introducir el pack de ba-tería de inserción
– Restablecer
– Intercambio de los componentes del hardware
3 Esta clase de error señaliza una avería en el ator-nillador. No estará listo para funcionar de mane-ra temporal hasta la confirmación del error.
Confirmación del error a través de las interfaces electrónicas:
– Señales BMS
– Lista de errores en el sistema operativo NEXO-OS del atornillador de batería con control remo-to
4 Esta clase de error señaliza una avería en el ator-nillador; pero el error es confirmado por el ator-nillador una vez solucionada la causa, p. ej., error de temperatura.
Autoconfirmación del error por parte del atornilla-dor
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

256/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
11.3 Lista completa de errores
Si después de la/s propuesta/s de solución indicadas no se produce ninguna mejora, envíe el atornillador con los datos exactos para su reparación al servicio técnico de Rexroth. Antes de realizar el envío pón-gase en contacto con el servicio técnico de Rexroth (véase la página 263).
Tabla 11–3: Descripción del error
Código de error
Clase de error
Descripción Posible causa/consecuencia Propuesta de solución
1 3 Tiempo de espera en modo de ator-nillado
La comunicación con el módulo de poten-cia a través del control integrado se en-cuentra fuera de la ventana de tiempo permitida durante el atornillado.
– El sistema está sobrecargado por otros procesos (ediciones de resultados, etc.).
– El módulo de potencia está defectuo-so.
Repetir el atornillado.
Actualizar el firmware.
2 4 Tiempo de espera en modo de ser-vicio
La comunicación con el módulo de poten-cia a través del control integrado se en-cuentra fuera de la ventana de tiempo permitida fuera del atornillado.
– El sistema está sobrecargado por otros procesos (ediciones de resultados, etc.).
– El módulo de potencia está defectuo-so.
Reiniciar el atornillador.
Actualizar el firmware.
10 3 Error de hardware módulo de po-tencia
El módulo de potencia está defectuoso.
11 4 Sobretemperatura batería Temperatura del pack de baterías de inser-ción.
Dejar enfriar o sustituir el pack de baterías de inserción.
Adaptar el tiempo de atornillado y de pausa (tiempo de ciclo)
Comprobar la temperatura ambiente.
12 4 Sobrecalentamiento en el módulo de potencia
Temperatura del módulo de potencia. Dejar enfriar el módulo de potencia.
Adaptar el tiempo de atornillado y de pausa (tiempo de ciclo)
Comprobar la temperatura ambiente.
13 4 Módulo de potencia: error de co-municación
Reiniciar el atornillador.
14 4 Módulo de potencia: error de servi-cio
No se puede leer el estado de los interrup-tores de inicio y R/L.
Reiniciar el atornillador.
15 4 Módulo de potencia: tensión de en-trada defectuosa
El pack de baterías de inserción está de-fectuoso.
Sustituir el pack de baterías de inserción.
100 0 Programa de atornillado no disponi-ble
Se está eligiendo un programa de atornilla-do para ejecutar que el atornillador no pue-de encontrar en su memoria.
Crear programa de atornillado
Comprobar la selección de programas de atornillado.
101 1 La placa de características del eje de medición no es legible, compro-bar la conexión de enchufe.
La placa de características del eje de me-dición no es legible.
Reiniciar el atornillador.
102 1 Error de suma de comprobación placa de características eje de me-dición
La placa de características electrónica leí-da del eje de medición no coincide con el valor guardado en la suma de comproba-ción.
Reiniciar el atornillador.
Actualizar el firmware.
103 1 Error acceso a administración de errores
La base de datos interna no está lista para el acceso.
Reiniciar el atornillador.
Actualizar el firmware.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 257/265
104 1 No es posible la comunicación con la unidad de medición
No es posible la comunicación con el re-gistro de valores de medición.
Reiniciar el atornillador.
Actualizar el firmware.
105 1 No es posible efectuar la lectura de tabla de calibrado del eje de medi-ción
La tabla de calibración del eje de medición no es legible.
Reiniciar el atornillador.
106 1 El contador de ciclos no es legible La memoria interna no puede leer el conta-dor de ciclos.
Reiniciar el atornillador.
Actualizar el firmware.
107 3 Programa de atornillado no válido El archivo de programa cargado por la me-moria interna no es legible.
Importar de nuevo el programa de atornilla-do o crear uno nuevo.
108 3 Tiempo de espera en modo de ator-nillado
No se reciben valores de medición dentro de la ventana de tiempo permitida.
– El sistema está sobrecargado por otros procesos (ediciones de resultados, etc.).
Repetir el atornillado.
Actualizar el firmware.
109 3 Error de estado del eje de medi-ción.
Se han recibido demasiados valores de medición erróneos del eje de medición.
Repetir el atornillado.
Actualizar el firmware.
110 3 La batería se retiró mientras se reti-raba el racor
El atornillador detecta una pérdida de ten-sión de alimentación durante el atornillado.
Sustituir el pack de baterías de inserción.
Comprobar el caso de atornillado: puede es-tar consumiéndose demasiada potencia.
Reiniciar el atornillador.
111 3 Sobrecarga del husillo El par de giro registrado es superior al par máximo permitido (par nominal +10 %).
Analizar el caso de atornillado y comprobar el programa de atornillado.
112 3 Tiempo de espera leer valores de medición
No se reciben valores de medición válidos dentro de la ventana de tiempo permitida.
113 4 Módulo de potencia offline No es posible establecer la comunicación con el módulo de potencia.
Reiniciar el atornillador.
Actualizar el firmware.
200 1 No ha podido leerse la tabla BMS La memoria interna no puede leer la tabla BMS.
Reiniciar el atornillador.
Actualizar el firmware.
201 1 La inicialización de la interfaz BMS ha fallado
La memoria interna no puede leer la tabla BMS.
Reiniciar el atornillador.
Actualizar el firmware.
202 1 Error de datos interfaz BMS La memoria interna no puede leer la tabla BMS.
Reiniciar el atornillador.
Actualizar el firmware.
300 4 Se ha retirado la tarjeta NX-SD. La tarjeta NX-SD ha sido retirada con la sa-lida de datos configurada en la tarjeta NX-SD o bien no está.
Insertar de nuevo la tarjeta NX-SD o desac-tivar la función a la que accede (por ejemplo: edición de resultados, etc.).
Reiniciar el atornillador.
301 1 La inicialización de datos de resul-tados ha dado error
No se ha podido inicializar la base de da-tos de resultados que se encuentra en la memoria interna.
Reiniciar el atornillador.
Eliminar el restablecimiento a una versión de firmware anterior o la base de datos (a partir de V1100).
303 4 Memoria de resultados llena La memoria de resultados interna está lle-na. No se pueden guardar más resultados. Esto puede suceder si los servicios de da-tos (por ejemplo: FTP) no eliminan sus da-tos.
Activar el almacenamiento en anillo, aumen-tar los registros de datos de resultados per-mitidos o eliminar la base de datos (a partir de V1100).
304 4 Memoria de tarjeta NX-SD llena La tarjeta NX-SD está llena. No se pueden guardar más resultados.
Sustituir la tarjeta NX-SD.
Reiniciar el atornillador.
307 1 Memoria de resultados incorrecta La memoria de resultados ya no es legible. Eliminar la base de datos (a partir de V1100).
400 1 Error de suma de comprobación placa de características
La placa de características electrónica leí-da de la memoria interna del atornillador no coincide con el valor guardado en la suma de comprobación.
Reiniciar el atornillador.
Actualizar el firmware.
Tabla 11–3: Descripción del error
Código de error
Clase de error
Descripción Posible causa/consecuencia Propuesta de solución
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

258/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
401 4 Sobretemperatura motor El motor tiene una temperatura demasiado elevada o el proceso de lectura no es co-rrecto.
Enfriar el motor.
Actualizar el firmware.
402 0 Intervalo de prueba de Nexo alcan-zado
Se ha alcanzado el intervalo de comproba-ción ajustado internamente.
Ajustar de modo distinto el intervalo de com-probación.
403 4 Capacidad de batería crítica La batería tiene una capacidad demasiado reducida o el proceso de lectura no es co-rrecto.
Sustituir el pack de baterías de inserción.
Actualizar el firmware.
404 1 Error del sistema archivo El sistema de archivos interno ha detecta-do un error de almacenamiento. En algu-nas ocasiones puede producirse tras realizar una actualización del firmware.
Reiniciar el atornillador.
Actualizar el firmware.
405 3 Error al actualizar firmware Una actualización del firmware ha finaliza-do de forma incorrecta.
Actualizar el firmware o realizar un restable-cimiento a una versión anterior a partir de V1100. En caso necesario, ejecutar de for-ma individual una actualización del módulo de potencia en el modo de servicio.
406 4 Unidad de control de sobrecalenta-miento
407 3 Módulo de potencia: error de ac-tualización
600 1 Inicialización WLAN interfaz ha dado error
Ha finalizado de forma incorrecta el inicio de la configuración de WLAN en el Nexo.
Realizar de nuevo la configuración de WLAN.
Reiniciar el atornillador.
601 4 Error leer configuración WLAN La memoria interna no puede leer la confi-guración de WLAN.
Reiniciar el atornillador.
Realizar de nuevo la configuración de WLAN.
Restablecer los ajustes para WLAN a los ajustes básico en NEXO-OS.
Actualizar el firmware.
700 1 Open Protocol: Selección del pro-grama incompleta
La inicialización de los bits de selección de programa no es correcta.
Establecer todos los bits de selección de programa en la interfaz BMS Open Protocol o eliminarlos todos.
701 3 Open Protocol: Configuración in-correcta
La memoria interna no puede leer la confi-guración Open Protocol.
Reiniciar el atornillador.
Realizar de nuevo la configuración para Open Protocol en NEXO-OS.
Restablecer los ajustes para Open Protocol a los ajustes básico en NEXO-OS.
Actualizar el firmware.
702 0 Open Protocol: Se ha producido un error en Bloquear
800 1 Trabajo: error de inicialización El archivo del modo leído por la memoria interna no es legible.
Crear o importar de nuevo el modo.
Utilizar una copia de seguridad.
801 3 Trabajo: Número de trabajo no dis-ponible
Se está eligiendo un trabajo para ejecutar que el atornillador no puede encontrar en su memoria.
Crear un nuevo trabajo o comprobar la se-lección de trabajos.
802 1 Trabajo: Error durante la ejecución El archivo del trabajo leído por la memoria interna no es legible.
Crear o importar de nuevo el trabajo.
Utilizar una copia de seguridad.
Tabla 11–3: Descripción del error
Código de error
Clase de error
Descripción Posible causa/consecuencia Propuesta de solución
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

3 608 870 A47 Técnica de atornillado | Bosch Rexroth AG 259/265
11.4 Sustitución de componentes defectuosos
Es básico que los componentes y conductos se sustituyan estando desconectados de la corriente.
11.5 Reducción de la alimentación eléctrica al cambiar la batería
La alimentación eléctrica del control integrado se mantiene aproximadamente unos 20 segundos al cam-biar la batería. Se producirá una reducción (< 20 segundos) en los siguientes casos:
• Tráfico de datos elevado a través de WLAN (< 10 segundos).
• El pack de baterías de inserción ha sido retirado varias veces de manera consecutiva.
• Envejecimiento de la alimentación eléctrica integrada.
• La alimentación eléctrica integrada está defectuosa.
ADVERTENCIA
Realización incorrecta de trabajos de mantenimientoSi los trabajos de mantenimiento son inadecuados pueden resultar heridas personas, dañarse com-ponentes y ponerse en peligro la seguridad del sistema de atornillado. Los trabajos de mantenimiento siempre deben ser realizados por personal especializado con los
conocimientos y las herramientas necesarias para realizar los trabajos necesarios. Rexroth le recomienda el servicio técnico de Rexroth. Sobre todo en trabajos relevantes para la seguridad y trabajos en sistemas relevantes para la seguridad, el servicio técnico por un especialista cuali-ficado es imprescindible.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

260/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

12 Contrato de licencia
El software del atornillador de batería con control remoto Nexo incluye software de terceros. Las condiciones de licencia del software utilizado se pueden consultar en NEXO-OS,
en del área de navegación.
En la opción de menú "Acceso tarjeta NX-SD" se abre una ventana del explorador. Las licencias se encuentran a su disposición en los directorios "licenses" (licencias) y "sourcecode" (código fuente).

262/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

13 Servicio técnico y distribución
13.1 Servicio técnico
En todo lo referente a los conocimientos fundamentales sobre el sistema, somos su contacto de confian-za.
En cualquier caso: Servicio de Rexroth
• Puede ponerse en contacto con nosotros a cualquier hora del día y de la noche en el número:
+49 9352 40 50 60
• Naturalmente, también puede hacerlo por correo electrónico:
Servicio a nivel mundial
Nuestra red de servicio global está a su disposición en todo momento en más de 40 países. Encontrará información más detallada sobre nuestros puntos de servicio en Alemania y en el mundo en la página de Internet:
www.boschrexroth.com/service-405060
Preparación de la información
Podremos ayudarle de forma rápida y eficiente si tiene a mano la siguiente información:
• Descripción detallada de la avería y de las circunstancias
• Los datos en la placa de características de los productos correspondientes, en especial número de material y número de serie.
• Números de teléfono y de fax, así como la dirección de correo electrónico para ponernos en contacto con usted en caso de que tengamos preguntas

264/265 Bosch Rexroth AG | Técnica de atornillado 3 608 870 A47
13.2 Distribución
Bosch Rexroth AGElectric Drives and Controls
Postfach 13 5797803 Lohr, Alemania
Bgm.-Dr.-Nebel-Str. 297816 Lohr, Alemania
Puede ponerse en contacto con nosotros:
• por teléfono
+49 9352 18 0
• por fax
+49 9352 18 8400
• por correo electrónico
13.3 Internet
Encontrará más información sobre Rexroth-Schraubtechnik en
www.boschrexroth.com/electrics
Encontrará más indicaciones acerca del servicio técnico, reparaciones y formaciones, así como la direc-ción actual de nuestras oficinas de distribución en:
www.boschrexroth.com
Si se encuentra fuera de Alemania póngase en contacto con nuestra persona de contacto más cercana.
Atornillador de batería con control remoto Nexo | 3 608 870 A47/2017-05

Bosch Rexroth AG Electric Drives and Controls Postfach 1161 71534 Murrhardt, DeutschlandFornsbacher Str. 92 71540 Murrhardt, DeutschlandTel.: +49 71 92 22 208 Fax +49 71 92 22 181 [email protected] www.boschrexroth.com/schraubtechnik
3 608 870 A47ES | 2017-05 AE© Bosch Rexroth AG 2017Subject to revisions!Printed in Germany
Ihr VertragshändlerYour cencessionary
FÜR BALKENCODE
06113609929910