revista robotica
25
Diego arguello Aguilar María de la torre Roca Rodrigo Felix Rodrigo Juarez Robocop ROBOTICA La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots. La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control. Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.
-
Upload
mariadltr10-dltr -
Category
Documents
-
view
238 -
download
3
description
rebista;compu;robotica
Transcript of revista robotica
Diego arguello Aguilar
María de la torre Roca
Rodrigo Felix Rodrigo Juarez
Robocop ROBOTICA
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots. La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control. Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.

¿Qué es la RoboCup? RoboCup
La RoboCup es una iniciativa de investigación y educación en torno a una competición en la que pueden integrarse diferentes tecnologías. Promueve la investigación en robótica e inteligencia artificial.
Tal y como puede leerse en la web oficial de este proyecto " El objetivo último del proyecto es desarrollar para la RoboCup 2050 un equipo de robots humanoides completamente autónomos que sean capaces de ganar al equipo humano campeón del mundo de fútbol."
La RoboCup se desarrolla en varias modalidades, en el año 2009 en Graz las cuatro siguientes.
RoboCup Fútbol
La RoboCup fútbol es una competición de fútbol entre robots. Esta se desarrolla en diferentes categorías:
• Liga en simulador: una plataforma de investigación para sistemas multiagente e inteligencia artificial
• Liga en tamaño pequeño: dos equipos de 5 pequeños robots (han de caber en una circunferencia de 180 mm de diámetro) se enfrentan utilizando cámaras sobre el mismo robot o sobre el campo.En esta categoría los sobots pueden comunicarse con un ordenador externo.
• Liga en tamaño medio: robots de tamaño medio con funcionamiento totalmente autónomo
• Liga con plataforma estándar: todos los equipos utilizan robots idénticos. Actualmente la plataforma es el robot NAO de Aldebaran.
• Liga humanoide: robots humanoides 100% autónomos con tamaños comprendidos entre 30 y 160 cm.
RoboCup Rescate

• Liga en simulador: El rescate en simulador es una nueva área de experimentación en la RoboCup. Su objetivo principal es proporcionar soporte en situaciones de emergencia por medio de la integración de información sobre desastres, predicción, planificación y la interfaz humana.
• Liga de robots: Esta prueba de rescate con robots tiene como objeto fomentar la investigación en torno a la respuesta a situaciones de emergencia.
RoboCup@home
Esta nueva competición está enfocada a aplicaciones en el mundo real y la interacción humano-máquina con robots autónomos.
RoboCup Junior
RoboCup Junior es un proyecto educativo dirigido a jóvenes estudiantes de hasta 19 años de edad. Su objeto es educativo y está diseñado para introducir la RoboCup en la enseñanza primaria y secundaria. En los diferentes retos hay dos categorías, la primera hasta 14 años y la segunda de 14 a 19. En esta modalidad de la RoboCup hay tres retos diferentes:
• Fútbol • Rescate • Danza
MODELO DEL BRAZO La figura1 muestra la forma en que se esbozó en una maqueta la forma en que se construiría el modelo funcional del brazo mecánico, capaz de movilizarse de forma exacta en cada uno de los 64 cuadros del tablero de ajedrez. La idea es trabajar con dos motores paso a paso que permitan la movilización del brazo de forma horizontal (coordenadas en el eje X) y de forma vertical (coordenadas en el eje y).

Figura1: Modelo de brazo mecánico BRAZO MECÁNICO FUNCIONAL Se realizaron dos modelos funcionales. El primero realiza el movimiento horizontal a través de una cremallera que se desplaza por el movimiento de un motor paso a paso en el cual está suspendido el eje que realiza el movimiento vertical de la misma forma que el anterior.

Figura2: Primer modelo de brazo mecánico funcional El desarrollo de otra alternativa como elemento necesario a fin de contar con los suficientes recursos y garantizar el objeto final que es el brazo mecánico para jugar ajedrez, en ese desarrollo también se utilizaronmateriales livianos como el acrílico y el aluminio , así como la aplicación de coordenadas XY, como elemento desujeción de las piezas del ajedrez, se utilizo los principios del electroimán, las piezas del juego se ubican sobreuna mesa. El mecanismo de desplazamiento se encuentra compuesto por dos motores paso a paso y un ejeen conjunto con un sistema de de piñón cremallera para el desplazamiento en Y un una polea, piñón en elmotor paso a paso y una correa de transmisión para el desplazamiento en X (figura 3). El material de color blanco permite la optimización del uso del sistema de visión ya que no refleja luz que impidauna correcta lectura. En general sus movimientos son suaves, rígidos en Y confiables en cuanto a sudesplazamiento continuo y sin vibraciones, las trayectorias son limpias y con rozamientos bajos.
Figura3: Segundo modelo de brazo mecánico funcional
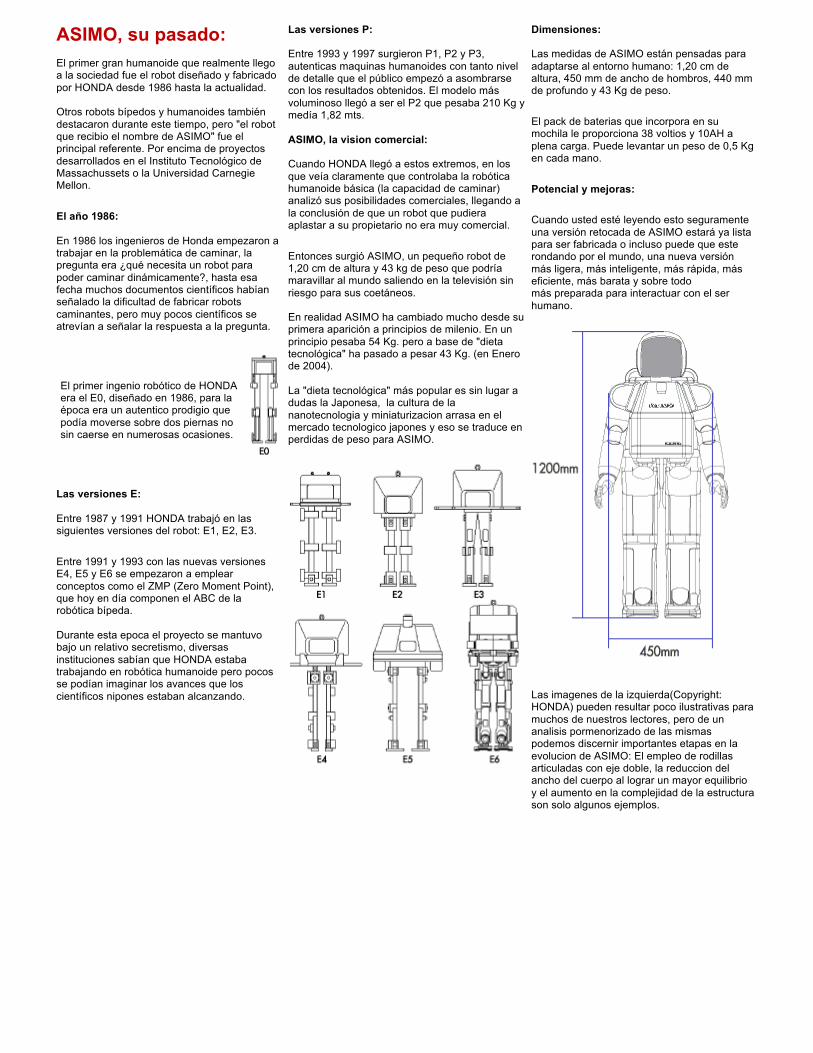
ASIMO, su pasado: El primer gran humanoide que realmente llego a la sociedad fue el robot diseñado y fabricado por HONDA desde 1986 hasta la actualidad. Otros robots bípedos y humanoides también destacaron durante este tiempo, pero "el robot que recibio el nombre de ASIMO" fue el principal referente. Por encima de proyectos desarrollados en el Instituto Tecnológico de Massachussets o la Universidad Carnegie Mellon.
El año 1986: En 1986 los ingenieros de Honda empezaron a trabajar en la problemática de caminar, la pregunta era ¿qué necesita un robot para poder caminar dinámicamente?, hasta esa fecha muchos documentos científicos habían señalado la dificultad de fabricar robots caminantes, pero muy pocos científicos se atrevían a señalar la respuesta a la pregunta.
El primer ingenio robótico de HONDA era el E0, diseñado en 1986, para la época era un autentico prodigio que podía moverse sobre dos piernas no sin caerse en numerosas ocasiones.
Las versiones E: Entre 1987 y 1991 HONDA trabajó en las siguientes versiones del robot: E1, E2, E3.
Entre 1991 y 1993 con las nuevas versiones E4, E5 y E6 se empezaron a emplear conceptos como el ZMP (Zero Moment Point), que hoy en día componen el ABC de la robótica bípeda. Durante esta epoca el proyecto se mantuvo bajo un relativo secretismo, diversas instituciones sabían que HONDA estaba trabajando en robótica humanoide pero pocos se podían imaginar los avances que los científicos nipones estaban alcanzando.
Las versiones P: Entre 1993 y 1997 surgieron P1, P2 y P3, autenticas maquinas humanoides con tanto nivel de detalle que el público empezó a asombrarse con los resultados obtenidos. El modelo más voluminoso llegó a ser el P2 que pesaba 210 Kg y medía 1,82 mts. ASIMO, la vision comercial: Cuando HONDA llegó a estos extremos, en los que veía claramente que controlaba la robótica humanoide básica (la capacidad de caminar) analizó sus posibilidades comerciales, llegando a la conclusión de que un robot que pudiera aplastar a su propietario no era muy comercial.
Entonces surgió ASIMO, un pequeño robot de 1,20 cm de altura y 43 kg de peso que podría maravillar al mundo saliendo en la televisión sin riesgo para sus coetáneos. En realidad ASIMO ha cambiado mucho desde su primera aparición a principios de milenio. En un principio pesaba 54 Kg. pero a base de "dieta tecnológica" ha pasado a pesar 43 Kg. (en Enero de 2004). La "dieta tecnológica" más popular es sin lugar a dudas la Japonesa, la cultura de la nanotecnologia y miniaturizacion arrasa en el mercado tecnologico japones y eso se traduce en perdidas de peso para ASIMO.
Dimensiones: Las medidas de ASIMO están pensadas para adaptarse al entorno humano: 1,20 cm de altura, 450 mm de ancho de hombros, 440 mm de profundo y 43 Kg de peso.
El pack de baterias que incorpora en su mochila le proporciona 38 voltios y 10AH a plena carga. Puede levantar un peso de 0,5 Kg en cada mano.
Potencial y mejoras:
Cuando usted esté leyendo esto seguramente una versión retocada de ASIMO estará ya lista para ser fabricada o incluso puede que este rondando por el mundo, una nueva versión más ligera, más inteligente, más rápida, más eficiente, más barata y sobre todo más preparada para interactuar con el ser humano.
Las imagenes de la izquierda(Copyright: HONDA) pueden resultar poco ilustrativas para muchos de nuestros lectores, pero de un analisis pormenorizado de las mismas podemos discernir importantes etapas en la evolucion de ASIMO: El empleo de rodillas articuladas con eje doble, la reduccion del ancho del cuerpo al lograr un mayor equilibrio y el aumento en la complejidad de la estructura son solo algunos ejemplos.

Robot Jupiter El JUPITER XL es un robot servoarticulado con cuatro grados de libertad, el cual trabaja por definición depuntos. Las partes que conforman el JUPITER XL son: el brazo del robot, el controlador principal, elamplificador y el control manual. El brazo de robot, como ya se comentó anteriormente, tiene cuatro grados de libertad y la posibilidad deintercambiar las herramientas durante la secuencia o proceso, esta es la descripción del brazo. Este robot júpiter tiene una configuración tipo SCARA , su impulsión es electro−mecánica y se usa principalmente paraensamble e inspección. El controlador principal contiene el disco del sistema, así como es el que permite al usuario encender elequipo y visualizar las señales de entrada y salida que está recibiendo el robot; a continuación se presenta unabreve descripción del mismo. Otro elemento importante, como ya se había mencionado es el control manual, también conocido como TEACH PENDANT, desde el cual se realizan los movimientos, se determinan los puntos y se desarrolla elprograma. En la figura que se presenta, se hace una breve descripción de las teclas y sus funciones. MEDIDAS DE SEGURIDAD · Consultar al instructor antes de enviar al robot a HOME con la instrucción HM <F1>. · Cuando se vaya a liberar la herramienta, es importante sujetarla con la otra mano para evitar impactos. PROCEDIMIENTO DE ARRANQUE 1.Revisar el estado del equipo. 2.Revisar que la conexiones se encuentren en buen estado. 3.Inserte el disco del grupo que contiene el sistema operativo del robot. 4.Encender el botón de POWER del controlador. 5.Esperar a que cargue el Sistema Operativo. 6.El robot estará listo cuando presente la leyenda DRIVES : DISABLED en el control manual. 7.Presionar <F3> para habilitar el amplificador. 8.Presionar <F2> para habilitar los servomotores. PRECAUCIÓN: Por ningún motivo entrar a la opción SET <F4> 9.Enviar a HOME con el comando HM<F1 IMPORTANTE: Verificar que el robot se encuentre en tal posición que pueda localizar el punto de HOME, de lo contrario desplazarlo hacia el usuario en los ejes 1 y 2. PROCEDIMIENTO DE APAGADO · Buscar la opción SET que está asignada a la tecla <F1> utilizando la tecla <SCROLL> · Presionar <F1> SET. · Llevar a la posición HOMEcon <F1>.
IMPORTANTE: Verificar que el robot se encuentre en tal posición que pueda localizar el punto de HOME, de lo contrario desplazarlo hacia el usuario. · Presionar <F2> para deshabilitar los servomotores. · Presionar <F3> para deshabilitar el amplificador. · Apagar el controlador. PROGRAMACIÓN DEL ROBOT JUPITER XL Los archivos que utiliza el JUPITER para realizar una tarea automatizada, son principalmente:archivo.PRG .... Archivo del programa a ejecutar archivo.PTS...... Archivo de los puntos predefinidos los cuales deben estar cargados en la memoria delcontrolador al momento de ejecutarse. archivo.COM.....Archivo que contiene tanto el Programa, como los Puntos y los Parámetros. Facilitando asíel transferir todos los archivos al robot con la transferencia de un mismo archivo. El programa como tal se realiza en el robot, utilizando el control manual, desde el menú correspondiente; parallegar a la edición del programa hay que seguir el siguiente procedimiento : Desde el menú inicial presionar la tecla <EXEC> para ir a la pantalla de selección de Modo. 1.− Presionar la tecla <F1> para entrar al menú de Programación. 2.− En el menú de programación, seleccionar la tecla de función que corresponda al comando requerido, obuscarlo desplazando la pantalla con la tecla <Scroll>. 3.− Presionar la tecla <Enter> para dar entrada al comando y al parámetro. 4.− Para finalizar la edición o para salir del menú en cualquier ocasión es suficiente utilizar la tecla <EXEC>.NOTA: Se podrá contar con un total de 27 comandos para la edición de un programa.
Realizado ya el programa se puede almacenar en el disco, respondiendo <F1>= Yes a la pregunta que sepresenta; de lo contrario se podrán almacenar los puntos y programa en archivos utilizando la computadoracentral. A continuación se presenta el procedimiento a seguir. INSTRUCCIONES Y COMANDOS DEL JUPITER XL · COMANDOS DE EDICIÓN EN PANTALLA INS (Insert) Inserta una línea dentro del programa que se está editando DEL (Delay) Borra una línea del programa en edición FIX Restaura el programa en edición LIN (Line) Ir a una línea en especial II. COMANDOS DE PROGRAMACIÓN BÁSICOS MP 001 Mueve el brazo al Punto 001 con desaceleración MT 001 Mueve el brazo al Punto 001 con desaceleración media MS 001 Mueve el brazo al Punto 001 sin desaceleración

SP (Speed) Determina la Velocidad a la que se moverá el brazo ON 2 Envía señal para encendido los outputs, donde el 2 es alimentación de aire OF 3 Envía señal para apagar los outputs, donde el 3 es la mordaza DE 10 (Delay) El programa hace un retardo, dejando de operar por 1 seg. NP (No Program) No hay instrucción definida en esa línea · COMANDOS DE PROGRAMACIÓN AVANZADOS GR (Griper) Activa las mordazas para sostener el griper TT (Test True) Prueba si la señal especificada es verdadera TF (Test False) Prueba si la señal especificada es falsa IF
Establece un condicional de ejecución del programa GO 20 (Goto) Ejecuta la línea número 20 CS 3 (Call Subrutine) Llama a la subrutina etiquetada como 3 LB 1 (Label) Etiqueta la subrutina siguiente como 1 RE (Return) Termina de ejecutar la subrutina actual y regresa al programa principal AC (Acceleration) Define el tiempo de aceleración del brazo WT 11 (Wait True) Espera que la señal 11 sea verdadera para continuar ejecutando el programa WF 11 (Wait False) Espera que la señal 11 sea falsa ST (Stop) Se detiene la ejecución del programa FR (For) Define otro tipo de condicional NX (Next) Complementa el condicional For WTM (Wait To Monitor) Espera alguna señal desde el Monitor
Aibo
Aibo es un robot mascota fabricado por Sony. Tiene forma de perro. Dispone de sensores que le evitan chocar contra objetos, y una cola que funciona de antena, además de "sentido del tacto".
Presentado en 1999, AIBO es uno de los juguetes más sofisticados que se pueden encontrar en el mercado. Usa una combinación de tecnologías robóticas y multimedia e inteligencia artificial para hacer posible que una serie de hardware y software, normalmente “inanimado”, pueda tratarse como si fuera un compañero interactivo. Bajo una “vestimenta” en forma de perro, el Aibo genera interacción con su operador: Es capaz de reconocer los gestos e incluso la actitud corporal de su dueño. Es sensible a las caricias, tiene una enorme capacidad de movimientos, equilibrio y flexibilidad, y lo más importante: aprende.
Según la compañía, Aibo verdaderamente tiene emociones e instintos programados en su cerebro: según la situación, Aibo moverá las piernas vigorosamente o mostrará mal humor si no recibe la atención que pide. El modo en que respondemos a las expresionas emocionales de Aibo afecta enormemente su personalidad y crecimiento". ¿Un principio de ciber-psicología?
Aibo se ha usado principalmente para la investigación de la inteligencia artificial, dado que integra una computadora, sistema de visión y motores de articulación en un único paquete muy barato comparado con otros robots de investigación de inteligencia artificial más comunes. Si se compra a Sony, los últimos modelos ERS-110 y ERS-111 cuestan alrededor de $2500US, £1800 o ¥250,000 en Japón.
Aibo no es el resultado de una investigación exhaustiva; refleja la fascinación humana para crear vida. El origen de los productos tales como el Aibo se enlaza con los mitos y leyendas sobre objetos inanimados cobrando vida. Ahora, gracias a las diferentes tecnologías actuales, esto es posible. Este tipo de histórias han ayudado mucho a traer el Aibo al mercado.

Lego Mindstorms Bloque NXT
El bloque NXT es una versión mejorada a partir de Lego Mindstorms RCX, que generalmente se considera la predecesora y precursora de los bloques programables de Lego.
Debido a la comercialización de los bloques programables, Lego vendió la generación NXT en dos versiones: Retail Version y Education Base Set. Una ventaja de la versión Educacional es que se incluía las baterías recargables y el cargador, pero esta misma versión debía comprar el software según el tipo de licencia: Personal, Sala de clases, Sitio.
Además, Lego dispuso de varios kits para desarrolladores según las características de los programas que estuvieran desarrollando,
• Software Developer Kit (SDK), que incluía los controladores del puerto de USB, archivos ejecutables y referencia a los bytecodes.
• Hardware Developer Kit (HDK), incluía la documentación y esquemas para los sensores de NXT.
• Bluetooth Developer Kit (BDK), documentos de los protocolos usados para la comunicación Bluetooth.
Microcontrolador
El microcontrolador que posee es un ARM7 de 32 bits, que incluye 256 Kb de memoria Flash y 64 Kb de RAM externa, la cual a diferencia del bloque RCX, posee mayores capacidades de ejecución de programas, evitando que los procesos inherentes de varios paquetes de datos colisionen y produzcan errores y un posible error en la ejecución del software. Su presentación es similar al Hitachi H8 ya que se encuentra en el circuito impreso del bloque, junto a la memoria FLASH.

Entradas y salidas
En el bloque de NXT existen cuatro entradas para los sensores, pero los conectores son distintos de los del RCX, lo que impide la conexión de sus motores o sensores, sin embargo, el kit de NXT incluye el adaptador para que los sensores de RCX sean compatibles con NXT.
Las salidas de energía aún son tres localizadas en la parte posterior del bloque, haciendo que la conexión para los motores y partes móviles sean de más fácil acceso.
Comunicaciones
El bloque de NXT puede comunicarse con el computador mediante la interfaz de USB que posee, la cual ya viene en la versión 2.0. Además, para comunicarse con otros robots en las cercanías posee una interfaz Bluetooth que es compatible con la Clase II v 2.0. Esta conectividad con Bluetooth no tan sólo permite conectarse con otros bloques, sino también con computadores, palms, teléfonos móviles, y otros aparatos con esta interfaz de comunicación.
Dentro de las posibilidades de conexión se encuentran
• Conectar hasta tres dispositivos distintos, • Buscar y conectarse a otros dispositivos que posean Bluetooth, • Recordar dispositivos con los cuales se ha conectado anteriormente para
conectarse más rápidamente, • Establecer el bloque NXT como visible o invisible para el resto de los
dispositivos.

Historia de la robótica
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots.1 2 La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.
Fecha Importancia Nombre del
robot Inventor
Siglo I a. C. y antes
Descripciones de más de 100 máquinas y autómatas, incluyendo un artefacto con fuego, un órgano de viento, una máquina operada mediante una moneda, una máquina de vapor, en Pneumatica y Automata de Herón de Alexandria
Autonoma
Ctesibius de Alexandria, Filón de Bizancio, Herón de Alexandria, y otros
1206 Primer robot humanoide programable
Barco con cuatro músicos robotizados
Al-Jazarí
c. 1495 Diseño de un robot humanoide Caballero mecánico
Leonardo da Vinci
1738 Pato mecánico capaz de comer, agitar sus alas y excretar.
Digesting Duck Jacques de Vaucanson
1800s Juguetes mecánicos japoneses que sirven té, disparan flechas y pintan.
Juguetes Karakuri
Hisashige Tanaka
1921 Aparece el primer autómata de ficción llamado "robot", aparece en R.U.R.
Rossum's Universal Robots
Karel Čapek
1930s Se exhibe un robot humanoide en la World's Fairs entre los años 1939 y 1940
Elektro Westinghouse Electric Corporation
1948 Exhibición de un robot con comportamiento biológico simple5
Elsie y Elmer William Grey Walter
1956 Primer robot comercial, de la compañía Unimation fundada por George Devol y
Unimate George Devol
Joseph Engelberger, basada en una patente de Devol6
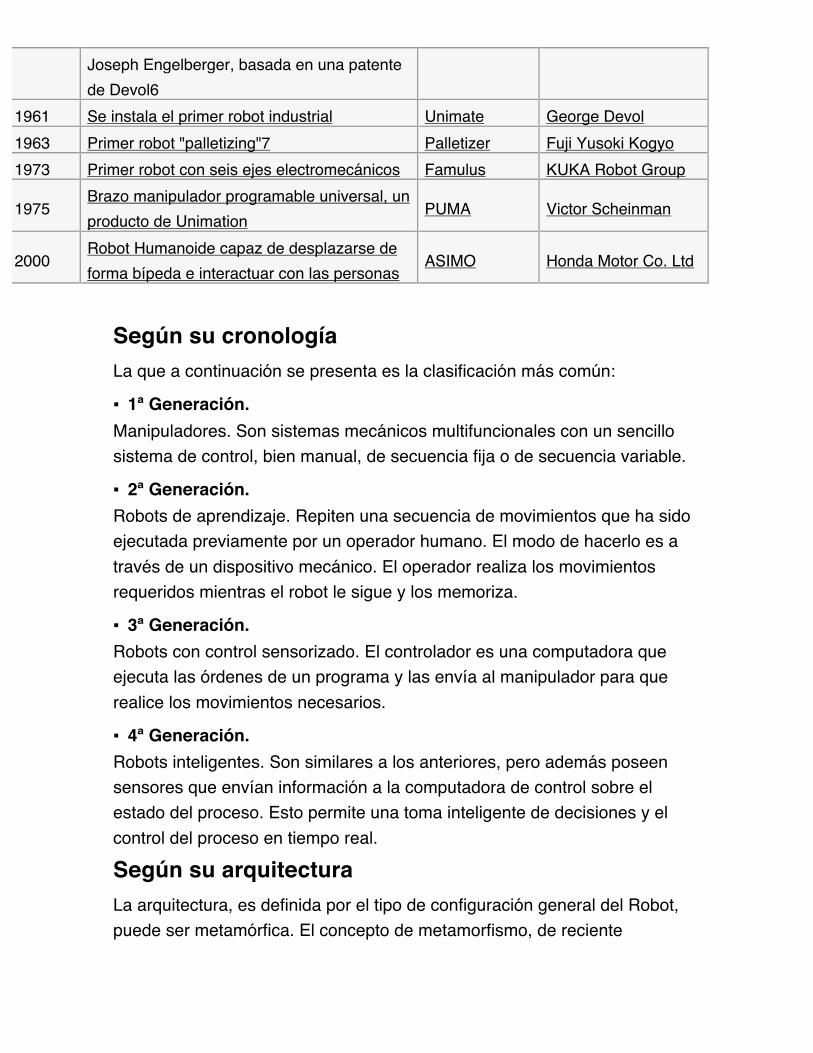
1961 Se instala el primer robot industrial Unimate George Devol 1963 Primer robot "palletizing"7 Palletizer Fuji Yusoki Kogyo 1973 Primer robot con seis ejes electromecánicos Famulus KUKA Robot Group
1975 Brazo manipulador programable universal, un producto de Unimation
PUMA Victor Scheinman
2000 Robot Humanoide capaz de desplazarse de forma bípeda e interactuar con las personas
ASIMO Honda Motor Co. Ltd
Según su cronología La que a continuación se presenta es la clasificación más común:
▪ 1ª Generación. Manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
▪ 2ª Generación. Robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
▪ 3ª Generación. Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
▪ 4ª Generación. Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real.
Según su arquitectura La arquitectura, es definida por el tipo de configuración general del Robot, puede ser metamórfica. El concepto de metamorfismo, de reciente
aparición, se ha introducido para incrementar la flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales. Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes grupos: Poliarticulados, Móviles, Androides, Zoomórficos e Híbridos.
▪ 1. Poliarticulados En este grupo están los Robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad. En este grupo se encuentran los manipuladores, los Robots industriales, los Robots cartesianos y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.
▪ 2. Móviles Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Estos Robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
▪ 3. Androides Son Robots que intentan reproducir total o parcialmente la forma y el
comportamiento cinemática del ser humano. Actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los aspectos más complejos de estos Robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot.
▪ 4. Zoomórficos Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los Robots zoomórficos no caminadores está muy poco evolucionado. Los experimentados efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. Los Robots zoomórficos caminadores multípedos son muy numeroso y están siendo experimentados en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.
▪ 5. Híbridos corresponden a aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo uno de los atributos de los Robots móviles y de los Robots zoomórficos. De igual forma pueden considerarse híbridos algunos Robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los Robots industriales. En parecida situación se encuentran algunos Robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los Robots personales.

R2D2 y C3PO (La guerra de las galaxias) Esta especie de Gordo y Flaco de la ciencia ficción protagoniza algunas de las escenas más cómicas de la saga Star Wars. C3PO, el hombrecito dorado, es un androide de protocolo programado para el trato con todo tipo de seres galácticos. R2D2 es un droide astromecánico que conduce y repara naves espaciales.
Maria (Metrópolis)
Auténtica pionera cinematográfica, vio la luz en 1927 gracias a Fritz Lang. En una ciudad futurista donde los hombres son esclavos de la tecnología, este androide maligno se encarga de sembrar la discordia entre los rebeldes. Su imagen inspiró a muchos robots posteriores.
HAL 9000 (2001: Una odisea del espacio)
No es un robot, pero sin duda merece estar en este ranking. El superordenador de la nave Discovery es lo último en inteligencia artificial: no sólo está programado para controlarlo todo a bordo, también puede pensar como un humano. Pero su conciencia cibernética acabará por traicionarle...
T-800 (Terminator)
Este cyborg llega al presente desde un futuro dominado por las máquinas para acabar con la que será madre del líder de la resistencia humana. El robot se camufla bajo los musculitos de Arnold Schwarzenegger para convertirse en un despiadado pero carismático asesino.
RoboCop (RoboCop)
Otro cyborg, pero esta vez en el bando de los buenos. Tomad un agente de policía acribillado a balazos y reconstruidlo a base de un sofisticado sistema de recursos tecnológicos y armas de última generación. El resultado es una máquina invencible destinada al servicio de la ley y el orden.

Roy Batty (Blade Runner)
Líder de los replicantes Nexus 6, una partida de robots creados por los humanos. Son idénticos al hombre, pero más fuertes, más inteligentes, más ágiles... Su único defecto es que tienen fecha de caducidad, algo que no les gusta en absoluto y les lleva a rebelarse.
Robby (Planeta prohibido)
Uno de los robots más entrañables que ha dado el cine. Y también de los más serviciales: se encarga de las tareas del hogar, conduce, construye y derriba cosas, recibe a los visitantes inesperados... Pese a su fuerza extraordinaria no resulta peligroso, puesto que está programado para no matar.
Annalee Call (Alien resurrección)
Este androide femenino viaja en una nave mercenaria que trafica con humanos para experimentos, y su misión es mantener el cultivo de aliens bajo control. De apariencia débil, no duda en echar una mano a Ripley en su lucha contra los malvados bichejos.
Número 5 (Cortocircuito)
Dotado de la tecnología más avanzada, este robot tenía que ser un soldado perfecto, el arma decisiva en caso de guerra. Pero fue alcanzado por un rayo y todo cambió. Johnny 5 cobró vida y no tardó en sentir una necesidad imperiosa de descubrir el mundo con sus propios ojos...
David (A.I. Inteligencia artificial)
Es el prototipo de robot más avanzado, o eso nos cuenta Steven Spielberg en su película. Este niño artificial es idéntico a uno real y puede tener sentimientos como cualquier humano. De hecho, está programado para demostrar amor.

ORIGEN Las Tres Leyes de la Robótica de Asimov aparecen formuladas por primera vez en 1942 en el relato El círculo vicioso de Asimov. El autor busca situaciones contradictorias en las que la aplicación objetiva de las Tres Leyes se pone en tela de juicio planteando a la vez interesantes dilemas filosóficos y morales que, en esta colección, Robots & Aliens están más presentes que nunca. LAS TRES LEYES DE LA ROBOTICA
Ley CERO: En 1985, Asimov publicó un relato en la que uno de sus robot se ve obligado a herir a un ser humano por el bien del resto de la humanidad. Surge así una nueva ley, considerada la Ley Definitiva, la llamada Ley Cero, superior a todas las demás: "Un robot no puede lastimar a la humanidad o, por falta de acción, permitir que la humanidad sufra daños". Quedando así modificada la primera ley: "Un robot no debe dañar a un ser humano, o permitir, por inacción, que un ser humano sufra daño, a menos que tal acción viole la Ley Cero".
1. Un robot no puede causar daño a un ser humano ni, por omisión, permitir que un ser humano sufra daños.
2. Un robot debe obedecer las órdenes dadas por los seres humanos, salvo cuando tales órdenes entren en conflicto con la Primera Ley.
3. Un robot ha de proteger su existencia, siempre que dicha protección no entre en conflicto con la Primera o la Segunda Ley.
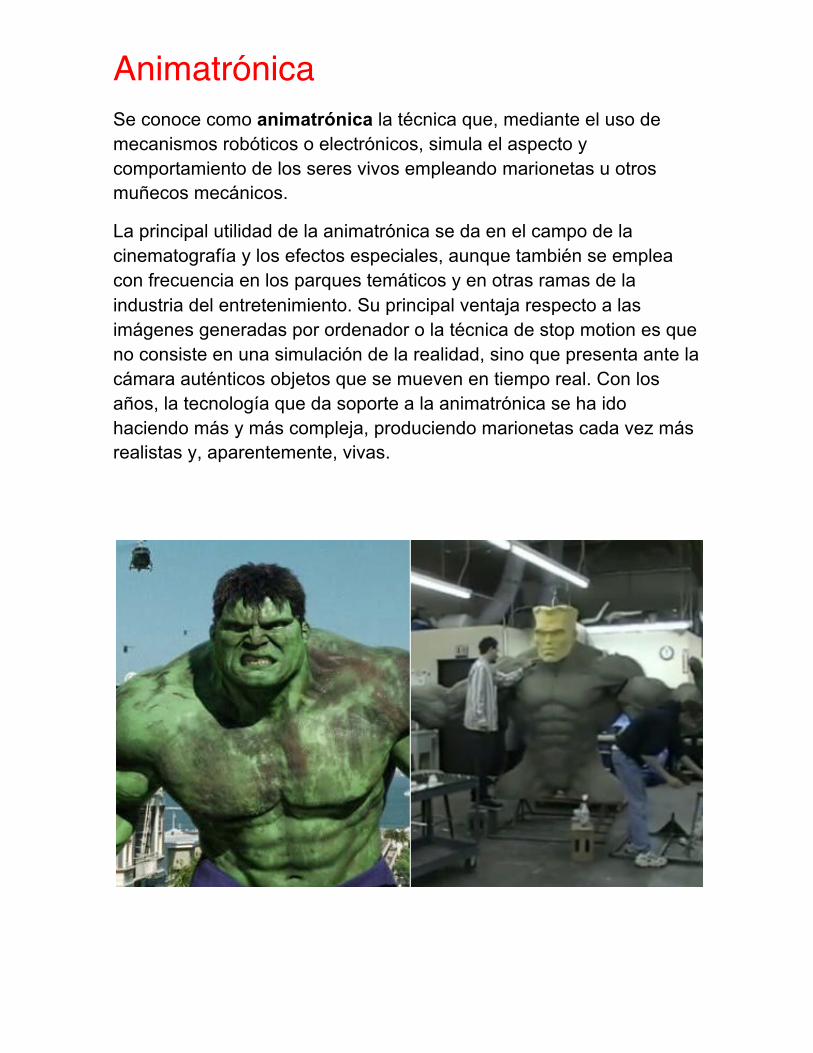
Animatrónica Se conoce como animatrónica la técnica que, mediante el uso de mecanismos robóticos o electrónicos, simula el aspecto y comportamiento de los seres vivos empleando marionetas u otros muñecos mecánicos.
La principal utilidad de la animatrónica se da en el campo de la cinematografía y los efectos especiales, aunque también se emplea con frecuencia en los parques temáticos y en otras ramas de la industria del entretenimiento. Su principal ventaja respecto a las imágenes generadas por ordenador o la técnica de stop motion es que no consiste en una simulación de la realidad, sino que presenta ante la cámara auténticos objetos que se mueven en tiempo real. Con los años, la tecnología que da soporte a la animatrónica se ha ido haciendo más y más compleja, produciendo marionetas cada vez más realistas y, aparentemente, vivas.
transformers es una película dirigida por Michael Bay y producida por Steven Spielberg basada en una marca de juguetes de Hasbro. El guión estuvo al cargo de Roberto Orci y Alex Kurtzman. Protagonizada por Shia LaBeouf, Megan Fox, John Turturro, Josh Duhamel, Tyrese Gibson, Peter Cullen y Hugo Weaving. El film estuvo nominado a tres premios Oscar: mejores efectos especiales, efectos de sonido y sonido. En Estados Unidos se estrenó el 4 de julio de 2007.
Hace muchos siglos que los autobots y los decepticons, dos razas alienígenas mecánicas, luchan entre sí para conseguir el destino del universo. La batalla se encuentra en un punto importante en su llegada a la Tierra, donde el joven Sam Witwicky (Shia LaBeouf) se
convierte en la última esperanza para su planeta. Ayudado por su compañera de clase Mikaela Banes (Megan Fox) y los autobots, Sam deberá encontrar antes que nadie un elemento conocido como "El cubo" que contiene la chispa de Allspark. Optimus Prime, líder de los benévolos autobots, describe en una voz en off el fin del planeta de los Transformers, Cybertron. Fue destruida por el malvado líder Decepticon Megatron en su lucha por hacerse con la All Spark (Chispa). Los Autobots quieren encontrar la chispa para reconstruir Cybertron y poner fin a la guerra entre los Autobots y los Decepticons, mientras que los Decepticons quieren usarlo para destruir a los autobots y tomar el control del universo. Megatron había conseguido localizar la chispa en
la Tierra, pero se estrelló al aterrizar en el Círculo Polar Ártico y se congeló en el hielo. Después de tropezar con el cuerpo congelado en 1897, el capitán y explorador Archibald Witwicky activó por accidente el sistema de navegación de Megatron y sus anteojos fueron impresos con las coordenadas de la ubicación de la All Spark, un incidente que lo dejó ciego e inestable mentalmente. El Sector 7, una organización secreta del gobierno creada por el presidente Herbert Hoover, descubrió la chispa en el río Colorado y construyó la represa Hoover alrededor de ella para enmascarar las emisiones de su energía. Megatron (todavía congelado) fue trasladado a esta instalación y es utilizado para avanzar la tecnología humana a través de ingeniería inversa.