Resumenes de primeros cuatro capitulos a la Dinámica Estructural

of 13
-
Upload
mario-covarrubias-navarro -
Category
Documents
-
view
1.027 -
download
1
description
Resumen de primeros cuatro capítulos del libro de Dinámica Estructural de Paz/Leight
Transcript of Resumenes de primeros cuatro capitulos a la Dinámica Estructural
A00811124
1
Resumen de Captulos Introductorios a la Dinmica EstructuralMario Covarrubias NavarroResumen Se describen las consideraciones ms relevantes de la obra de Dinmica Estructural de Paz/Leight dentro de los captulos del 1 al 4 tocando los temas por orden de captulo: sistemas de un grado de libertad sin amortiguamiento, sistemas de un grado de libertad con amortiguamiento; respuesta de un sistema de un grado de libertad a cargas armnicas; y respuesta a cargas dinmicas generales.
CAPTULO 1. SISTEMAS DE UN GRADO DE LIBERTAD SIN AMORTIGUAMIENTOEl anlisis y diseo de estructuras que resistan los efectos dinmicos dependiendo del tiempo requiere de una idealizacin del sistema. Esta idealizacin se clasifica en tres grupos: 1. Materiales. Esta simplificacin concluye que los materiales son homogneos y que l los materiales tienen un comportamiento lineal elstico. Cargas. Algunas cargas se asumen puntuales en un punto geomtrico, para asumir las cargas inesperadas que son aplicadas, o asumir fuerzas externas para ser constantes o peridicas. Geometra. Se asume que las estructuras continuas sern analizadas como sistemas discretos especificando la locacin de los nodos y la direccin de sus desplazamientos. Los elementos son unidireccionales. Las placas tendrn un espesor pequeo.
Figura 1. Ejemplos de estructuras modeladas con un sistema de un grado de libertad.
Los sistemas de un grado de libertad son descritos por los siguientes elementos que lo conforman. 1. Elemento con masa (m) representando la masa y las caractersticas inerciales de la estructura. Elemento resorte (k) representando las fuerzas de restauracin y energa potencial almacenadas en la estructura. Elemento amortiguador (c) representando las caractersticas friccionales y energas de disipacin de la estructura. Fuerza de excitacin F(t) representando las fuerzas externas actuantes sobre el sistema estructural. Est escrita indicando que est en funcin del tiempo.
2.
2.
3.
3.
4.
1.1 Grados de libertad En dinmica estructural el nmero de coordenadas independientes necesaria para especificar la configuracin o posicin de un sistema en cualquier tiempo est referida al nuero de grados de libertad. Los sistemas de un grado de libertad indican que solo tienen una simple coordenada de desplazamiento.Manuscrito recibido en Agosto 30, 2011 Ing. Mario Covarrubias Navarro, estudiante de la Maestra en Ciencias con Especialidad en Ingeniera y Administracin de la Construccin en el Instituto Tecnolgico y de Estudios Superiores de Monterrey (ITESM). [email protected] Figura 2. Modelo analtico para sistemas de un grado de libertad.
Estos modelos analticos pueden proveer un completo y acertado conocimiento del comportamiento del modelo en s, pero solo una limitada o aproximada informacin en el comportamiento real del sistema.
A008111241.2 Sistema sin amortiguamiento Se dice que el sistema est en libre vibracin libre cuando el amortiguamiento est siendo despreciado y el movimiento y gobernado solamente por la influencia de las llamadas condiciones iniciales, que son los desplazamientos y velocidades a un t=0 al momento en el que el estudio es iniciado. Tambin es conocido como un oscilador simple sin amortiguamiento y es representado como sigue en la figura 3. 1.4 Ley de movimiento de Newton
2
El objetivo es describir el movimiento, eso es, predecir el desplazamiento o velocidad de la masa (m) en cualquier tiempo (t) dadas unas condiciones iniciales al tiempo t = 0. La analtica relacin entre el desplazamiento (u), y tiempo (t), es dada por la secunda ley de movimiento de Newton que se expresa como sigue.
Donde F es la fuerza resultante actuante en una partcula de nada (m) and (a) su resultante de aceleracin. La aceleracin es definida como la segunda derivada del vector posicin respecto al tiempo, esta ley es aplicable a cuerpos idealizados como partculas, donde se asume masa pero no volumen. 1.5 Diagrama de cuerpo libre El diagrama de cuerpo libre, es un boceto del cuerpo aislado de todos los dems cuerpos, en donde todas las fuerzas externas son mostradas. La aplicacin de la ley de movimiento de Newton para el desarrollo del DCL da como resultado Donde la fuerza del resorte acta en direccin negativa y la aceleracin es indicada como , los dos puntos sobre la letra indican la segunda derivada con respecto al tiempo y un solo punto por ende significa que es la primera derivada indicando la velocidad.
Figura 3. Representaciones alternas de modelos analticos de sistemas de un grado de libertad.
En esta figura la masa est restringida por un resorte y se limita el movimiento (u) como el movimiento permitido dentro del sistema o el grado de libertad. Las caractersticas mecnicas del resorte se describen en su relacin entre la magnitud de la fuerza (Fs) aplicar al extremo libre y el desplazamiento resultante (u). La constante de proporcionalidad entre la fuerza y el desplazamiento de un resorte lineal est referida como la rigidez o la constante de resorte, usualmente designada por la letra k. Se asume que el resorte en sus propiedades de fuerza deformacin en el sistema sea lineal.
1.3 Resortes en paralelo o en series Los resortes de acuerdo a su configuracin pueden ser determinados como constantes de equivalencia dependiendo de la manera de su configuracin ya sea paralela o en serie como se muestran a continuacin. Y la constante Kc se determina por las ecuaciones escritas en la figura 1.5.
Figura 5. Diagramas de cuerpo libre alternados: (a) Sistemas de un grado de libertad. (b) Mostrando solo fuerzas externas. (c) Mostrando fuerzas externas e inerciales.
1.6 Principio de DAlambert El principio de DAlambert establece que un sistema permanecer en un estado de equilibrio dinmico agregando a las fuerzas externas una fuerza ficticia que es comnmente conocida como fuerza inercial. Esta fuerza es igual a la masa (m) multiplicada por la aceleracin, y debe ser siempre direccionada negativamente con respecto a la coordenada correspondiente. Este principio permite que usando una ecuacin de equilibrio, se obtenga una ecuacin de movimiento.
Figura 4. Combinacin de resortes: (a) Resortes en paralelo (b) Resortes en serie.
A00811124 1.7 Solucin de la ecuacin diferencial de movimiento Se da solucin a la ecuacin de movimiento expresada anteriormente, la cual es clasificada como lineal y de segundo orden. Tomando en cuenta que y son constantes y que el resultado es cero clasifica a esta ecuacin como homognea con coeficientes constantes, por lo tanto se puede tomar en cuenta con cierto grado de satisfaccin, que existe un procedimiento general para su solucin asumiendo soluciones de prueba dados por
3El periodo (T) del movimiento es determinado por la expresin
El periodo es expresado usualmente en segundos por ciclo o simplemente por segundo con el entendimiento tcito que es por ciclo. El valor reciproco del periodo es la frecuencia natural
Donde A y B son constantes dependientes de las condiciones iniciales y donde es conocida como la frecuencia natural del sistema y se obtiene de la siguiente expresin.
La frecuencia natural es comnmente expresada en Hertz o ciclos por segundo (cps). Porque la cantidad de difiere de la frecuencia natural f solo por el factor constante 2, es a veces es referida como la frecuencia natural. Para distinguir ser llamada la frecuencia natural circular y con unidades de (rad/seg). 1.9 Amplitud de movimiento A travs de una transformacin trigonomtrica puede mostrarse a la ecuacin de movimiento de la siguiente manera ( Donde ( ) ) ( )
La cantidad en la ecuacin debe ser expresada en termino de los resultantes de los desplazamientos estticos derivados de las cargas aplicada al resorte obteniendo
Donde es el desplazamiento esttico del resorte debido a la carga W. Utilizando una sustitucin de ecuaciones se obtiene una solucin. Adems, teniendo dos constantes de integracin, A y B es, de hecho, la solucin general de esta ecuacin diferencial de segundo orden.
Por lo tanto, se simplifica la ecuacin de movimiento de la siguiente manera
La expresin de velocidad , es simplemente encontrada por diferencial respecto al tiempo la cual resulta en Para determinar los valores de A y B, se determinan por las condiciones iniciales a un t = 0 de desplazamiento y la velocidad . Finalmente sustituyendo las condiciones determinando los valores A y B se obtiene inicialesFigura 6. Definicin de ngulo o ngulo
Utilizando la asistencia de la figura 6 se puede percibir que 1.8 Frecuencia y periodo
A00811124La sustitucin de las ecuaciones da como resultado una ecuacin que puede arrojar la amplitud del movimiento. ( )
4
Los valores de y como la fase del ngulo. La solucin para el movimiento del oscilador simple grficamente se describe en la figura 7 a continuacin.
Figura 8. (a) Oscilador Amortiguado Viscoso. (b) Diagrama de cuerpo libre.
Aplicando el principio de DAlambert la suma de las fuerzas en la direccin u da la ecuacin diferencial de movimientoFigura 7. Respuesta de vibracin sin amortiguamiento.
CAPTULO 2. SISTEMAS DE UN GRADO DE LIBERTAD CON AMORTIGUAMIENTOLa experiencia muestra que no es posible tener un dispositivo que cumplan con las condiciones idealizadas de un sistema sin amortiguamiento. Las fuerzas designadas como friccionales o de amortiguamiento estn siempre presentes en cualquier sistema fsico sometido a movimiento. El mecanismo de la energa de transformacin o disipacin es bastante complejo y no es completamente entendido en este tiempo. Para poder contar con estas fuerzas de disipacin es necesario que en el anlisis dinmico del sistema se asuman ciertas consideraciones en base a la experiencia. 2.1 Amortiguamiento viscoso. Es comn que las fuerzas de amortiguamiento sern proporcionales a la magnitud de la velocidad y opuesto a la direccin del movimiento. Este tipo de amortiguamiento es conocido como amortiguamiento viscoso. Las suposiciones del amortiguamiento viscoso son a menudo hechas sin importar las caractersticas actuales del sistema. La principal razn para el amplio uso de suponer este tipo de amortiguamiento es que lleva a simplificar relativamente el anlisis matemtico. 2.2 Ecuacin de movimiento. En la siguiente figura (Fig. 8) m y k son, respectivamente, las constantes de masa y resorte de un oscilador y c es el coeficiente de amortiguamiento.
La funcin que satisface la solucin a prueba es la funcin exponencial resultando en la ecuacin
Reducindola a una ecuacin caracterstica para el sistema,
llamada
la
ecuacin
Las races de esta ecuacin cuadrtica
.
/
Por lo tanto, la solucin general es dada por la superposicin de las dos posibles soluciones ( ) Donde C1 y C2 son constantes de integracin para ser determinada por las condiciones individuales. 2.3 Sistema de amortiguamiento crtico Para un sistema oscilatorio con amortiguamiento critico ( ) la expresin bajo del radical es igual a cero esto es . /
En el amortiguamiento crtico de un sistema las races de la ecuacin caracterstica son iguales
A00811124Siendo las races iguales solo existe una constante de integracin por lo tanto una solucin independiente ( ) 2.4 Sistema sobre-amortiguado En un sistema sobre-amortiguado, el coeficiente de amortiguamiento es mayor que el valor del amortiguamiento crtico (c > ccr). Por lo tanto, la expresin bajo el radical es positivo, as que las races de la ecuacin caracterstica son reales y distintas, y consecuentemente la solucin es dada por la ecuacin ( ) Debe ser notado que los sistemas con sobreamortiguamiento o con amortiguamiento crtico no tienen como resultante un movimiento oscilatorio; la magnitud de la oscilacin decae exponencialmente hasta llegar a cero.( )
5 . /
Se define la relacin de amortiguamiento del sistema como:
Finalmente, cuando las condiciones iniciales de desplazamiento y velocidad son introducidas, las constantes de integracin pueden ser evaluadas y sustituidas ( ) ( )
Alternativamente, esta expresin puede ser escrita de la siguiente manera ( ) Donde ( ) ( )
Y (
)
Figura 9. Respuesta de amortiguamiento crtico.2.5 Sistema sub-amortiguado
vibracin
libre
conGrficamente se observa que el movimiento es oscilatorio, pero no peridico. La amplitud de la vibracin no es constante durante el movimiento pero decrece en ciclos sucesivos; sin embargo, las oscilaciones ocurren en intervalos iguales de tiempo. Este intervalo es designado como el periodo de amortiguamiento de vibracin y es dado por
Cuando el valor del coeficiente de amortiguamiento es menor que el amortiguamiento crtico (c < ccr) que ocurre cuando el radical es negativo, las races de la ecuacin caracterstica son conjugadas complejas as
. Donde
/
En la siguiente imagen se observa el comportamiento de un sistema sub-amortiguado.
es una unidad imaginaria.
Para estos casos es conveniente usar las ecuaciones de Euler que se relacionan con funciones exponenciales y trigonomtricas. Tras la sustitucin de estas funciones en la ecuacin caracterstica arroja la solucin general del sistema sub-amortiguado expresada a continuacin. ( )( )
(
)
Donde A y B son constantes de integracin redefinidas y D, la frecuencia de amortiguamiento del sistema, es dado porFigura 10. Respuesta de vibracin libre por sistema subamortiguado.
A00811124El valor del coeficiente de amortiguamiento para estructuras reales es mucho menor que el amortiguamiento crtico y usualmente entre los rangos de 2-10% del valor del amortiguamiento crtico. Sustituyendo por el valor extremo =0.10 de la frecuencia angular amortiguada.
6amplitud y es la frecuencia de la fuerza en radianes por segundo.
Se observa, que los valores son aproximadamente iguales por lo que usualmente en lugar de calcular la frecuencia amortiguada se utiliza la frecuencia natural sin amortiguamiento. 2.6 Decremento logartmico Un mtodo prctico para determinar experimentalmente el coeficiente de amortiguamiento de un sistema es iniciar la vibracin, obteniendo un registro del movimiento oscilatorio, tal como se muestra en la figura 11, y medir el radio de decaimiento de la amplitud del movimiento. El decaimiento es convencionalmente expresado como el decremento logartmico que se define por el logaritmo natural del radio de cualquiera de dos picos de amplitud sucesivos u1 y u2 en la vibracin libre pudiendo ser tambin expresado en funcin de las aceleraciones picos como se escribe a continuacin. Figura 12. (a) Oscilador no amortiguado excitado. (b) Diagrama de cuerpo libre.
La ecuacin diferencial obtenida por asumir todas las fuerzas en el diagrama de cuerpo libre es
Y la solucin puede ser expresada como ( ) ( ) ( )
Donde uc(t) es la solucin complementaria que satisface a la ecuacin homognea que es la parte izquierda de la ecuacin a cero; y up(t) es la solucin particular basada en la solucin que satisface la ecuacin diferencial no homognea. La ecuacin homognea uc(t) es dada por la expresin ( ) Y up(t) suscrita por ( )
Figura 11. Curva mostrando los desplazamientos picos y los desplazamientos en los puntos de la tangente.
CAPTULO 3. RESPUESTA DE UN SISTEMA DE UN GRADO DE LIBERTAD A CARGAS ARMNICASSe estudiar el movimiento de estructuras idealizadas como sistemas de un grado de libertad a excitaciones armnicas, que son, estructuras sujetas a fuerzas o desplazamientos cuyas magnitudes pueden ser representadas por un coseno o seno en funcin del tiempo. Para poder obtener la respuesta de la estructura a las condiciones de excitaciones armnicas e inclusive si no lo fueran, se utiliza el mtodo de Fourier, como la superposicin de respuestas individuales a los componentes armnicos de la excitacin externa. 3.1 Excitacin armnica: Sistema sin amortiguamiento. La fuerza impresa F(t) en un oscilador simple se asume como armnica e igual a donde es el pico de
Donde U es la amplitud e la solucin particular. A travs de una seria de sustituciones y al dar solucin a los coeficientes a travs de observas los casos de acuerdo a las condiciones iniciales resulta en la ecuacin de movimiento u(t). ( ) Donde ( )
La respuesta es dada por la superposicin de dos trminos armnicos de diferentes frecuencias. El movimiento resultante no es armnico; sin embargo para fines prcticos, el amortiguamiento siempre estar presente en el sistema y causara el trmino final, hasta el desvanecimiento eventual. Se observa que cuando un sistema se encuentra en una relacin r=1 en el que la frecuencia de la excitacin y la frecuencia natural, la amplitud de movimiento se vuelve infinitamente grande. A la condicin de coincidencia de las
A00811124frecuencias se le llama resonancia. En esta situacin los materiales de los elementos comnmente estn sujetos a limitaciones de resistencia por lo que a consecuencias de las cada vez mayores deformaciones la estructura falla. 3.2 Excitacin armnica: Sistema con amortiguamiento. Considerando la influencia del amortiguamiento viscoso en un sistema de un solo grado de libertad bajo vibraciones de influencia externa, la ecuacin diferencia se escribe agregando la parte del amortiguamiento.
7
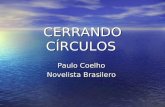
Figura 14. Factor dinmico de amplificacin cono una funcin de la relacin de frecuencias y con diferentes valores de amortiguamiento.
El ngulo de fase adems vara con las mismas cantidades (figura 15).
Figura 13. (a) Oscilador con amortiguamiento armnicamente excitado. (b) Diagrama de cuerpo libre.
La solucin general es dada obteniendo la combinacin de la solucin complementaria (transitoria) y la particular (steady-state) ( ) ( ( ) ( ) )
La relacin de la amplitud del steady-state de up(t) a la deflexin esttica ust es conocido como el factor dinmico de amplificacin (D), y es dado por
Figura 15. Angulo de fase como una funcin de relacin de frecuencias para diferentes valores de amortiguamiento.
(
)
(
)
3.3 Evaluacin de amortiguamiento en resonancia. Otra tcnica para determinar el amortiguamiento est basado en la observacin de la respuesta armnica steadystate, la cual requiere excitacin armnica de la estructura dentro de un rango de frecuencias en el sector de la resonancia. Una tpica curva de respuesta par estructuras tales que tengan un amortiguamiento moderado se grafica como lo muestra la figura 16, en el que la relacin de amortiguamiento es dada por
De esta anterior ecuacin se puede observar que el factor dinmico de amplificacin varia con la relacin de frecuencia r y la relacin de amortiguamiento . Se observa grficamente en la figura 14.
(
)
A00811124
8
Se muestra que la energa disipada es proporcional al cuadrado de la amplitud de movimiento U. 3.6 Amortiguamiento viscoso equivalente. Como se ha mencionado se considera en las estructuras un sistema de amortiguamiento viscoso con el fin de simplificar la ecuacin diferencial y conservarla lineal, sin embargo, existen casos en los que esta viscosidad es considerada como friccional debido a los dispositivos que se puedan usar para aminorar los daos a los que pueda ser sujeta la estructura. Los valores numricos asignados al coeficiente de amortiguamiento estn basados en valores obtenidos experimentalmente y de la determinacin de un amortiguamiento viscoso equivalente. El amortiguamiento equivalente eq debe ser basado en la mxima amplitud relativa de movimiento, o en el ancho de banda correspondiente a las frecuencias cuando la amplitudes igual a Dm/2, por ende entonces el amortiguamiento viscoso equivalente se determina con la ecuacin
Figura 16. Curva de respuesta de frecuencias para sistema moderadamente amortiguados.
Donde D(r=1) es el factor dinmico de amplificacin evaluada en resonancia. En prctica la relacin de amortiguamiento es determinada desde el factor de magnificacin dinmica evaluada a la mxima amplitud.
Um es la mxima amplitud. Este mtodo solo requiere de equipo simple para vibrar la estructura en un rango de frecuencias que despliegue la frecuencia de resonancia y un transductor para medida las amplitudes. 3.4 Mtodo de ancho de banda (Half-Power) para evaluar amortiguamiento. Examinando las cuervas de respuesta de la figura 16 se muestra que la forma de esta curva est controlada por la cantidad de amortiguamiento presente en el sistema; en particular el ancho de banda, que es, la diferencia entre dos frecuencias correspondientes a la misma respuesta de amplitud, est relacionada a la del sistema de amortiguamiento. En la evaluacin de amortiguamiento es conveniente medir el ancho de banda a 1/2 de la amplitud pico. La frecuencia correspondiente a este ancho de banda f1 y f2 son adems referidos como puntos half-power. 3.5 Energa disipada por amortiguamiento viscoso. La energa disipada por el amortiguamiento viscoso durante un ciclo o vibracin armnica de frecuencia es igual al trabajo hecho por la fuerza de amortiguamiento durante un desplazamiento diferencial du integrado sobre un periodo en vibracin T=2/ . La velocidad para el oscilador amortiguado acta sobre la fuerza armnica y es dada por una derivada que despus de ser sustituida en la diferencias da como resultado la ecuacin de energa disipada ED.
Experimentalmente es evaluada utilizando la expresin logartmica de decremento obteniendo
La definicin ms comn de est basada en identificar la energa disipada, en un ciclo vibratorio de una estructura actual, a la energa disipada en un sistema equivalente viscoso. Por lo tanto, identificando la energa disipada en un ciclo de vibracin armnica determinada de la experimentacin a la energa ED, se tiene
Y
En el que Es, la energa de tensin almacenada al mximo desplazamiento si el sistema fuera elstico y es determinada por la ecuacin
3.7 Respuesta a movimiento de soporte. 3.7.1 Movimiento absoluto.
(
)
Existen actualmente muchos casos donde la cimentacin o el soporte de las estructuras eta sujeto movimiento de tiempo variable. Las estructuras sujetas al movimiento de suelo de sismos u otros excitaciones tales como explosiones
A00811124o acciones dinmicas. Dadas estas circunstancias esta respuesta dinmica debe ser considerada en el anlisis. La ecuacin de movimiento de esta excitacin est dada por ( )
9
En el que u0 es la mxima amplitud y es la frecuencia del soporte en movimiento.
Figura 18. Trasmicidad contra relacin de aislamiento de vibracin.
frecuencia
por
3.7.2
Movimiento relativo.
Se puede resolver la ecuacin diferencian en trminos de movimiento relativo entre la masa m y el soporte dado por
Figura 17. (a) Oscilador amortiguado simple armnicamente excitado a travs de sus soportes. (b) Diagrama de cuerpo libre incluyendo las fuerzas de inercia.
Tras una sustitucin de ecuaciones resulta que
La ecuacin diferencial observando el movimiento del soporte se expresa de la siguiente manera: ( ) ( )
Donde puede ser interpretado como la amplitud de la fuerza efectiva actuante en la masa del oscilador con el desplazamiento indicado por coordenada ur. Haciendo ciertas consideraciones y sustituciones se obtiene la respuesta steady-state en trminos del movimiento relativo de la manera ( ) ( Donde ( ) ( ) )
En un problema importante en aislamiento de vibracin en el que el equipo debe ser protegido de vibracin que daen el soporte de la estructura. El grado de relacionado al aislamiento es conocido como transmisibilidad (Tr) y es definido como la relacin de la amplitud de movimiento U del oscilador a la amplitud u0 , el movimiento del soporte. ( ( ) ) ( )
3.8 Fuerza transmitida a la cimentacin. En el punto anterior se determin la respuesta de la estructura a un movimiento armnico en su cimentacin. En esta seccin se considerara un problema similar de aislamiento de vibracin; en este caso el problema es encontrar la fuerza que se trasmite a la cimentacin. La fuerza trasmitida al soporte a travs del resorte es ku y a travs de del elemento de amortiguamiento por lo tanto la fuerza transmitida total FT es Por medio de diferenciales y sustituyendo conlleva a: ( ) ( )
Analgicamente la trasmisin de movimiento, se puede encontrar la aceleracin trasmitida de la cimentacin a la masa. ( ) ( ( ) ) ( ( ) )
Mientras que la aceleracin de la cimentacin es obtenida por ( )
A00811124
10
Despus la mxima fuerza transmitida AT transmitida a la cimentacin es ( ( ) ) ( )
Una expresin para el ngulo total de fase puede ser determinada tomando la tangente funcin de ambos miembros as que a travs de sustituciones trigonomtricas se tiene como resultado.
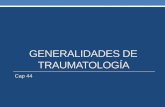
Figura 20. Respuesta de sismgrafo a movimiento armnico de la base.
CAPTULO 4. RESPUESTA A CARGAS DINMICAS GENERALES3.9 Instrumentos ssmicos. Cuando un sistema como el mostrado en la figura 19 es usado para el propsito de medicin de vibraciones, el desplazamiento relativo entre la masa y la base es registrado. Dicho instrumento es llamado sismgrafo y puede ser diseado para medir tanto desplazamientos como aceleraciones de la base y el movimiento armnico dado por la base se expresa a continuacin por Las estructuras reales en muy pocas ocasiones son sometidas a cargas armnicas. En este captulo se muestra el estudio de la respuesta a sistemas de un grado de libertad a tipos de fuerzas generales. Se observar que la respuesta puede ser obtenida en trminos de una integral que para algunas funciones de cargas simples pueden ser evaluadas analticamente. 4.1 Integral de Duhamel Sistemas sin amortiguamiento. Una carga de pulso es una carga que es aplicada durante un corto periodo de tiempo. El impulso correspondiente de este tipo de carga es definido como el producto de la fuerza y el tiempo de su duracin.
Figura 19. Modelo de un sismgrafo.
Figura 21. Funcin de carga general como una carga de impulso.
La figura 20 muestra el grfico de la ecuacin como una funcin de la relacin de frecuencia y la relacin de amortiguamiento. Se puede observar que la respuesta es esencialmente constantes para r > 1 y relacin de amortiguamiento = 0.5. Consecuentemente, la respuesta de un apropiado instrumento amortiguado de este tipo es esencialmente proporcional a la amplitud del desplazamiento de la base para frecuencias altas del movimiento de la base. El instrumento servir por tanto como un medidor de desplazamiento para tales movimientos. El rango de aplicabilidad del instrumento es incrementado al reducir la frecuencia natural, por ejemplo, reduciendo la rigidez o incrementando la masa.
En la figura 21 se muestra la grfica de un impulso en un tiempo d en el que el rea sombreada es representada como F()d. Este impuso acta sobre un cuerpo con masa m y que produce un cambio de velocidad que puede ser determinada de la Ley de Movimiento de Newton. ( ) Despejando: ( )
A00811124Donde F()d es el impulso y dv es el incremento de velocidad. Este impuso debe ser considerado para ser una velocidad inicial de la masa en el tiempo . Al considerar el impulso como actuante en la estructura representado por el oscilador no amortiguado. Al tiempo t el oscilador experimentar un cambio de velocidad dado por la ecuacin anterior. Este cambio de velocidad es introducido en la ecuacin de desplazamiento expresada en el captulo 1 como la velocidad inicial u0 junto con el desplazamiento inicial u0=0 al tiempo t produciendo un desplazamiento du(t) al tiempo final t dado por ( ) ( ) ( ) 4.1.2 ( ) ( ) ( )
11
Fuerza rectangular.
El segundo caso a considerar, donde una carga F0 aplicada repentinamente pero solo durante un tiempo limitado, td como se muestra a continuacin:
La funcin debe ser tomada como una serie de impulsos cortos a incrementos sucesivo d , cada un produciendo su propia respuesta diferencial al tiempo t debido a la accin continua de la fuerza F() se da por la sumacin o integral de los desplazamientos diferenciales du(t) de un tiempo t=0 para el tiempo t , esto es , ( ) ( ) ( )Figura 23. Factor de mxima carga dinmica para el oscilador no amortiguado actuado por una fuerza rectangular.
La integral conocida como la integral de Duhamel, representa el desplazamiento total producido por la fuerza de excitacin F() actuante un oscilador no amortiguado. Con el fin de incluir condiciones iniciales de velocidad y desplazamiento solo se somete la ecuacin a sustitucin dando como resultado una ecuacin que observa el desplazamiento total de un sistema no amortiguado de un grado de libertad con una carga arbitraria. ( ) 4.1.1 Fuerza constante. ( ) ( )
Hasta el tiempo td la soluciones dada aplicando la ecuacin resultante de la integracin utilizada en el caso anterior, para la respuesta despus del tiempo td. Despus de reemplazar t por t- td y las condiciones iniciales por las condiciones ud y vd, se obtiene ya reducidamente, ( ) *( ( ) +
Considerar el caso de una fuerza constante con magnitud F0 aplicada repentinamente a un oscilador no amortiguado al tiempo t=0 como se muestra en la figura 22.
Si el factor de carga dinmico (DLF) se define como el desplazamiento a cualquier tiempo t dividido por el desplazamiento esttico entonces la ecuacin se escribe como
( 4.1.3 Fuerza triangular.
)
Figura 22. Oscilador no amortiguado actuante por una fuerza constante.
Considerando ahora un sistema oscilador sin amortiguamiento, que inicialmente est en reposo sujeto a una fuerza F(t) que tiene un valor inicial F0 y que este decrece linealmente a cero al tiempo td. La respuesta puede ser computada por dos intervalos.
Utilizando la ecuacin dela vibracin libre de un oscilador no amortiguado y a travs de una integracin ( ) ( ) ( )
A00811124Que es la respuesta para un sistema amortiguado en trminos de la integral de Duhamel. 4.3 Respuesta por integracin directa.
12
La ecuacin diferencial de movimiento par aun sistema de un grado de libertad representada por un oscilador simple amortiguado, es obtenido estableciendo el equilibrio dinmico de las fuerzas en el diagrama de cuerpo libre (figura 25) en el cual la funcin F(t) representa la fuerza aplicada a la masa del oscilador.
Figura 24. Factor mximo de carga dinmico para un oscilador no amortiguado actuado por una fuerza triangular.
Ecuacin de desplazamiento en primer intervalo, ( ) ( )
La ecuacin de factor de carga dinmica. . . / obtiene elFigura 25. (a) Oscilador simple amortiguado excitado por la fuerza F(t). (b) Diagrama de cuerpo libre.
(
)
/
Para el segundo intervalo ( ) se desplazamiento y velocidad al tiempo td como ( ( ) )
Cuando la estructura modelada por el oscilador simple, es excitada por un movimiento en su soporte, la ecuacin de movimiento obtenido usando el diagrama de cuerpo libre de la figura 26 se obtiene ( ) ( )
Estas ecuaciones definen el estado inicial al tiempo t=td para el segundo intervalo. Para este intervalo se obtiene la respuesta como * ( )+
4.2 Integral de Duhamel- Sistemas amortiguados. La respuesta de un sistema amortiguado expresado por la integral de Duhamel se obtiene en una manera enteramente equivalente al anlisis sin amortiguar excepto que el impulso F(t)d produciendo una velocidad inicial ( ) es sustituido dentro de la ecuacin correspondiente de vibracin libre amortiguada. Estableciendo las condiciones iniciales y sustitucin en ecuaciones se obtiene la diferencial de desplazamiento. Sumando o integrando estos trminos de respuesta diferencial sobre los intervalos de cargas resultan en ( ) ( )( )
Figura 26. (a) Oscilador simple amortiguado excitado por el desplazamiento us(t) en su soporte. (b) Diagrama de cuerpo libre.
Tras otras sustituciones de us resulta en ecuaciones, que despus de comparacin, revela que las ecuaciones son matemticamente equivalentes si un lado de la ecuacin es interpretada como la fuerza efectiva finalmente siendo escrita como ( )
(
)
A008111244.4 Solucin de la ecuacin de movimiento El mtodo para la solucin de la ecuacin diferencial descrita en la seccin anterior es exacto para una funcin de excitacin descrita por segmentos lineales. El proceso de solucin requiere por conveniencia que la funcin de excitacin sea calculada a intervalos iguales de tiempo. La solucin debe ser expresada como la suma de la solucin complementaria uc para el cual el miembro segundo es igual a cero, y la solucin particular up que es
13
REFERENCIAS [1] Structural Dynamics; M. Paz, W. Leigh; Springer; 5 Ed.; 2004.
La solucin complementaria es dada en general por una ecuacin del captulo 2, para los intervalos correspondientes( ),
(
)
(
)-
En la otra mano, la solucin particular se toma de la forma, ( )
Tras un laborioso clculo de los coeficientes de integracin se resulta en las siguientes frmulas para calcular el desplazamiento, velocidad y aceleracin al tiempo de paso
CONCLUSIONES En este documento se describieron las bases para el anlisis dinmico de sistemas de un grado de libertad, bajo diferentes condiciones, ya sea considerando o no amortiguamientos viscosos; habiendo cargas de funciones, o cargas generales como pulsos. El desarrollo de este resumen se bas en principios matemticos y de ecuaciones diferenciales, u otros mtodos numricos para la resolucin de los problemas, por lo que tericamente son aplicables a sistemas en general. Este resume sienta las bases para el anlisis posterior de sistemas de ms grados de libertad y para un anlisis avanzado de estructuras.