
Respuesta sísmica de las estructuras
21
Apuntes de Análisis Estructural 2. David Gutiérrez Calzada Fecha de actualización: 2 septiembre 2017. Respuesta sísmica de las estructuras La acción de un sismo en una estructura reviste aspectos distintos de los de la mayoría de las otras acciones. Las diferencias no residen tanto en las características dinámicas de la acción, ya que sus efectos dependen de una interacción compleja entre el movimiento sísmico, las propiedades del suelo subyacente y las de la estructura misma. Algunas de las fallas más importantes en los edificios son las que se originan debido a la acción de un sismo, las cuales dependiendo de su magnitud pueden causar que se sobrepase un estado límite de la estructura, ya sea de servicio o resistencia. En el peor de los casos, estas fallas representarán el colapso de la estructura con sus consecuentes pérdidas económicas y/o humanas, las cuales pueden ser muy grandes. En México, la acción de los sismos representa la causa del mayor número de fallas y daños en las estructuras. En años recientes se ha avanzado mucho en el conocimiento del origen de los sismos y de los mecanismos geológicos involucrados. La ciencia que se dedica al estudio de las características de los sismos es una rama de la geofísica que se llama sismología. Los sismos de gran magnitud se explican por la teoría llama tectónica de placas. El corrimiento en la zona de contacto entre dos placas no ocurre de manera continua y suave; la fricción entre las rocas hace que se puedan generar en la superficie de contacto entre las placas esfuerzos considerables, hasta que se vence la resistencia mecánica en dicha superficie, provocando un deslizamiento brusco y la liberación súbita de una gran cantidad de energía. Este deslizamiento ocurre en cierta longitud a lo largo de la falla. Mientras mayor es la longitud afectada por el movimiento, mayor será la cantidad de energía liberada. La energía liberada produce ondas en la corteza terrestre, las que se transmiten a grandes distancias y provocan la vibración de la superficie del suelo. Se aprecia que los epicentros se concentran en franjas bien definidas, la principal de las cuales constituye el llamado Cinturón Circumpacífico; otra es el Cinturón Alpino. Todas estas zonas corresponden a límites entre placas. Aunque la gran mayoría de los sismos ocurren en esas zonas, algunos llegan a producirse en fracturas que existen dentro de las placas. En México, la mayoría de los sismos de gran magnitud ocurren por la subducción de la placa de Cocos por debajo de la placa de Norteamérica.
Transcript of Respuesta sísmica de las estructuras

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Respuesta sísmica de las estructuras
La acción de un sismo en una estructura reviste aspectos distintos de los de la mayoría de las
otras acciones. Las diferencias no residen tanto en las características dinámicas de la acción, ya
que sus efectos dependen de una interacción compleja entre el movimiento sísmico, las
propiedades del suelo subyacente y las de la estructura misma.
Algunas de las fallas más importantes en los edificios son las que se originan debido a la acción
de un sismo, las cuales dependiendo de su magnitud pueden causar que se sobrepase un
estado límite de la estructura, ya sea de servicio o resistencia. En el peor de los casos, estas
fallas representarán el colapso de la estructura con sus consecuentes pérdidas económicas y/o
humanas, las cuales pueden ser muy grandes.
En México, la acción de los sismos representa la causa del mayor número de fallas y daños en
las estructuras.
En años recientes se ha avanzado mucho en el conocimiento del origen de los sismos y de los
mecanismos geológicos involucrados. La ciencia que se dedica al estudio de las características
de los sismos es una rama de la geofísica que se llama sismología.
Los sismos de gran magnitud se explican por la teoría llama tectónica de placas.
El corrimiento en la zona de contacto entre dos placas no ocurre de manera continua y suave; la
fricción entre las rocas hace que se puedan generar en la superficie de contacto entre las placas
esfuerzos considerables, hasta que se vence la resistencia mecánica en dicha superficie,
provocando un deslizamiento brusco y la liberación súbita de una gran cantidad de energía.
Este deslizamiento ocurre en cierta longitud a lo largo de la falla. Mientras mayor es la longitud
afectada por el movimiento, mayor será la cantidad de energía liberada. La energía liberada
produce ondas en la corteza terrestre, las que se transmiten a grandes distancias y provocan la
vibración de la superficie del suelo.
Se aprecia que los epicentros se concentran en franjas bien definidas, la principal de las cuales
constituye el llamado Cinturón Circumpacífico; otra es el Cinturón Alpino. Todas estas zonas
corresponden a límites entre placas. Aunque la gran mayoría de los sismos ocurren en esas
zonas, algunos llegan a producirse en fracturas que existen dentro de las placas.
En México, la mayoría de los sismos de gran magnitud ocurren por la subducción de la placa
de Cocos por debajo de la placa de Norteamérica.

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
La brusca caída de esfuerzos que acompaña el deslizamiento de las placas genera ondas
sísmicas debidas a las deformaciones longitudinales (de compresión) o transversales (de
cortante) de la roca. Estas ondas viajan alejándose de la falla y su amplitud se va atenuando
poco a poco. Las ondas longitudinales (llamadas ondas P o principales) viajan a mayor
velocidad y tienen amplitudes menores que las ondas de cortante (ondas S o secundarias). A
medida que se alejan de la falla, las ondas mencionadas se reflejan en las capas superficiales y
producen otro tipo de ondas (de superficie) que tienen velocidades menores que las dos
anteriores. De esta manera, cerca de la falla, los tres tipos de ondas están superpuestos, pero a
distancias grandes de la falla se distinguen los tres trenes de ondas porque llegan en tiempos
diferentes.
La magnitud de un sismo es una medida del tamaño del mismo que es independiente del lugar
donde se hace la observación y que se relaciona en forma aproximada con la cantidad de
energía que se libera durante el evento. Se determina a partir de las amplitudes de registros de
sismógrafos estándar. La escala más conocida de magnitudes es la de Richter (mL). Cada
incremento de una unidad en la escala de Richter implica un aumento de 32 veces en la
cantidad de energía liberada. Existen otras escalas de magnitud que se basan en ondas de
cuerpo (mb), en ondas superficiales (ms) y en el momento sísmico (mw). Hay diferencias
significativas en las magnitudes medidas por las diferentes escalas.
La intensidad de un sismo es una medida de los efectos que éste produce en un sitio dado, o
sea de las características del movimiento del terreno y de la potencialidad destructiva del sismo,
en ese lugar en particular y en lo que concierne a sus efectos en las construcciones. La más
común es la de Mercalli modificada, en que la intensidad se mide por una apreciación subjetiva
del comportamiento de las construcciones en el sitio.
Desde el punto de vista de la ingeniería sísmica, lo que interesa son las intensidades que
pueden presentarse en el lugar donde se va a construir la estructura. Una misma intensidad
puede ser producida por un sismo lejano de gran magnitud o por uno cercano de mucho menor
magnitud.

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
El foco (o hipocentro) de un sismo es el lugar donde comienza el corrimiento de la falla
geológica que originó el sismo; epicentro es el punto sobre la superficie terrestre directamente
encima del foco.
La sismicidad de una zona se relaciona con la actividad sísmica de la región o, más
propiamente, con la frecuencia con que se generan sismos de diferentes magnitudes en el área
considerada.
El peligro sísmico de un sitio se relaciona con la intensidad de los movimientos sísmicos que se
esperan en el lugar y con la frecuencia con que se exceden movimientos de distintas
intensidades. El peligro sísmico de un lugar dependerá de la sismicidad de las regiones que se
encuentran a distancias tales que los sismos en ellas generados pueden producir efectos
apreciables en el sitio. La acción sísmica de diseño para una estructura dada dependerá, por
tanto, del peligro sísmico del lugar donde ésta se va a construir.
Un acelerograma es un registro de la historia de aceleraciones que provoca el sismo en una
dirección determinada y constituye la descripción más útil del movimiento del suelo en un
lugar. Los acelerogramas se registran en aparatos llamados acelerógrafos que, colocados en un
sitio, arrancan automáticamente al ser excitados por el movimiento del terreno y registran
simultáneamente la aceleración en dos direcciones horizontales ortogonales y en una vertical.
El movimiento del terreno puede considerarse constituido por la superposición de vibraciones
armónicas con distintas frecuencias. Según las características del sismo, las ondas cuya
frecuencia se encuentra dentro de cierto intervalo tienen amplitudes mayores que las demás y
son dominantes en cuanto a efectos sísmicos en las estructuras. Por ejemplo, en sismos
registrados muy cerca del epicentro prevalecen las vibraciones de alta frecuencia (periodos
cortos), mientras que en un sismo registrado lejos del epicentro prevalecen los movimientos de
baja frecuencia (periodos largos). Esto se debe a que las ondas de alta frecuencia se amortiguan
más rápidamente con la distancia, que los de baja frecuencia.
Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Las aceleraciones que producen mayores daños en las estructuras son las horizontales; las
aceleraciones verticales son de amplitud apreciable sólo en sitios cercanos al epicentro y
producen solicitaciones severas sólo en algunas formas estructurales particulares. Existen,
además, efectos sísmicos excepcionales que no dependen de las aceleraciones.
La aceleración no es el único parámetro del movimiento del suelo que influye en la respuesta de
las estructuras; importan además la velocidad del movimiento del terreno y, en algunos casos,
su desplazamiento. Integrando en el tiempo del acelerograma se obtiene la historia de
velocidades e, integrando esta última, se obtiene la de desplazamientos del terreno.
Los estudios del peligro sísmico de lugares específicos se basan esencialmente en análisis
estadístico de la información disponible sobre los sismos ocurridos.
La interpretación de los datos estadísticos se basa usualmente en la hipótesis de que el proceso
de generación de los sismos es estacionario, o sea que la probabilidad de ocurrencia de un
sismo en un sitio es constante en el tiempo. Esto implica que no hay aumentos o disminuciones
de la sismicidad con el tiempo y que el hecho de que haya ocurrido un temblor de determinada
magnitud en una cierta fecha, no modifica la probabilidad de que ocurra otro sismo igual o de
otra magnitud en una fecha posterior.
El modelo de probabilidades más empleado en los estudios de peligro sísmico es el de Poisson.
Los parámetros básicos que definen la intensidad sísmica son la aceleración y velocidad máxima
que el terreno experimenta. Con base en el análisis de un gran número de acelerogramas
registrados en distintos lugares para un mismo sismo, se han establecido relaciones empíricas
entre la magnitud de un sismo y la velocidad y aceleración máxima del terreno en un sitio que
se encuentra a cierta distancia del epicentro. Estas relaciones se conocen como leyes de
atenuación. Por ejemplo, las de Esteva
en cm/seg2
en cm/seg
en que a y v son la aceleración y velocidad máximas del terreno, M la magnitud del sismo y R la
distancia entre el foco y el sitio en estudio, en km. El grado de precisión de las leyes de
atenuación de tipo general, como las anteriores generalmente es muy pobre.
Regionalización sísmica. Se determina el peligro sísmico de un número de sitios suficiente
para distinguir zonas de peligro sísmico semejante y poder asociar a ellas un valor de
aceleración y velocidad máxima de terreno, u otra medida de la intensidad, que corresponden a
un periodo de recurrencia dado.

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Sistemas de un grado de libertad
Vibraciones libres
Cualquier estructura se puede analizar estática o dinámicamente. El primer análisis
corresponde a una aplicación lenta del sistema externo de cargas de manera que la resistencia
interna de la estructura tiene tiempo suficiente para movilizarse y en cualquier instante existe
igualdad entre los sistemas de fuerzas externo e interno.
Cuando el sistema de cargas se aplica rápidamente, se produce una vibración o sea un
movimiento del sistema con respecto a su posición de equilibrio. La fuerza que origina y
mantiene una vibración tiene carácter fluctuante y recibe el nombre de fuerza excitadora.
Estas fuerzas excitadoras y las vibraciones correspondientes, se presentan en sistemas
con elementos en movimiento; producen efectos indeseables en la mayoría de los casos, ya que
se aumentan los esfuerzos de trabajo de los materiales y pueden afectar el funcionamiento de la
máquina o los dispositivos cercanos.
Como ejemplo sencillo de un sistema vibratorio, se puede considerar una masa de peso
W, suspendida de un resorte de rigidez k y de peso despreciable, como se muestra en la figura 1
Figura 1. sistema masa-resorte
La constante k es la fuerza necesaria para producir una deformación unitaria del
resorte. La masa está en equilibrio bajo la acción de dos fuerzas de la misma magnitud,
colineales y de sentidos opuestos: el peso W actuando hacia abajo y la fuerza en el resorte
dirigida hacia arriba, donde es el desplazamiento estático del resorte, debido al peso W. Esta
posición, en la que todas las fuerzas están en equilibrio, es la llamada posición de equilibrio, y
los desplazamientos x de la masa se miden a partir de ella.
Si la masa es desplazada una distancia x hacia abajo y se le suelta instantáneamente,
entonces la fuerza en el resorte excede en kx al peso W y la masa se mueve hacia arriba
aumentando su velocidad hasta pasar por la posición de equilibrio, momento en que x cambia
de signo; el resorte se comprime y la velocidad de la masa disminuye hasta un valor cero. En
ese instante la masa desciende aumentando primero su velocidad y disminuyéndola después a
un valor nulo en su posición extrema y así sucesivamente.

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Este movimiento que se repite después de un cierto tiempo, se denomina periódico. Se llama
período al tiempo necesario para una repetición del movimiento, y ciclo a una repetición
completa del movimiento. La frecuencia es el número de ciclos en la unidad de tiempo. La
amplitud del movimiento es igual al máximo desplazamiento producido con respecto a la
posición de equilibrio.
La vibración del ejemplo anterior es rectilínea; se puede considerar un sistema de
vibración torsional, por ejemplo, el péndulo a torsión, mostrado en la figura 2.
En este caso, la rigidez K es el momento necesario que hay que aplicar para producir
un giro unitario ; J indica el momento de inercia de la masa circular.
Debido a la semejanza entre los tipos de vibración rectilínea y torsional, el análisis de
un tipo es aplicable igualmente al otro.
Se llama vibración libre a aquélla que ocurre bajo la acción de las propias fuerzas del
sistema, sin la acción de ninguna fuerza externa excitadora. La vibración es forzada cuando
actúan fuerzas externas fluctuantes en el sistema durante su movimiento vibratorio
Figura 2. Sistema de vibración torsional
Fuerza de restauración es la que tiende a mover a la masa a su posición de equilibrio. En la mayoría
de los sistemas vibratorios aparece, con mayor o menor intensidad, una fuerza de fricción que
produce un amortiguamiento, es decir, una fuerza que se opone al movimiento del sistema y que
eventualmente ocasionará la terminación de la oscilación. Este amortiguamiento puede ser producido
por el aire, por fricción en un fluido, magnéticamente, etc.
Frecuencia natural es la del sistema que tiene vibración libre y que no tiene fricción. Se llama
frecuencia natural amortiguada cuando incluye el efecto de fricción. El cálculo de la frecuencia natu-
ral de un sistema es muy importante por el efecto de resonancia; éste ocurre cuando en una vibración
forzada la frecuencia de la fuerza excitadora es igual a la frecuencia natural del sistema. En este caso,
la amplitud de la vibración aumenta sin límite y se regula únicamente por la cantidad del amorti-
guamiento del sistema.
Los grados de libertad de un sistema son el mínimo número de coordenadas que se necesitan
para definir completamente y en cualquier instante, la configuración del sistema vibratorio.
Los ejemplos de las figuras 1 y 2 son de un solo grado de libertad, ya que basta una
coordenada para definir la configuración del sistema en cualquier momento. El resorte se considera
sin masa, ya que de otra manera el sistema tendría un número infinito de grados de libertad. Una
partícula moviéndose en el espacio de tres dimensiones, tiene tres grados de libertad. Un tipo de
movimiento muy importante es el movimiento armónico simple, que es el movimiento periódico más

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
sencillo. Este movimiento lo describe una partícula con movimiento rectilíneo cuando su aceleración
siempre es proporcional a la distancia de la partícula a un punto fijo de la trayectoria y dirigida a ese
punto fijo. Los sistemas con movimientos periódicos vibratorios sencillos o complejos, se pueden
considerar formados de movimientos simples o de una combinación de movimientos armónicos
simples de diferentes amplitudes y frecuencias utilizando las series de Fourier.
Un movimiento armónico se puede representar por la función seno o coseno, por ejemplo
donde x es el desplazamiento en cualquier tiempo t, A es la amplitud, es constante y es la
frecuencia circular o angular del movimiento en radianes por unidad de tiempo, siendo un ángulo
medido en radianes. El período angular de la función es , de la cual se deduce que el período del
movimiento es2
T
y la frecuencia
2f
.
Vibraciones libres de sistemas no amortiguados
Se estudia la vibración del sistema que se esquematiza en la figura 3, formado por una masa y
un resorte de comportamiento elástico y lineal.
Figura 3. Sistema de un grado de libertad
Si se desplaza la masa desde su posición de equilibrio y a continuación se deja vibrar
libremente, la masa oscilará alrededor de dicha posición. Aislando la masa y planteando el
equilibrio de fuerzas, se obtiene:
0mx kx
Dividiendo entre la masa
0k
x xm
2 20 con n n
kx x
m
La solución es de la forma:
1 2cos senn nx t A t A t
n
k
m
Donde n es la frecuencia natural o frecuencia propia del sistema (en radianes por segundo)
siendo la frecuencia a la qué tiende a vibrar el sistema de acuerdo con sus características. A1 y
A2 son dos constantes arbitrarias que se calculan a partir de las condiciones iniciales.
La forma alternativa es de la forma:
sen nx t A t
mk
x(t)
mk x
m x
Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
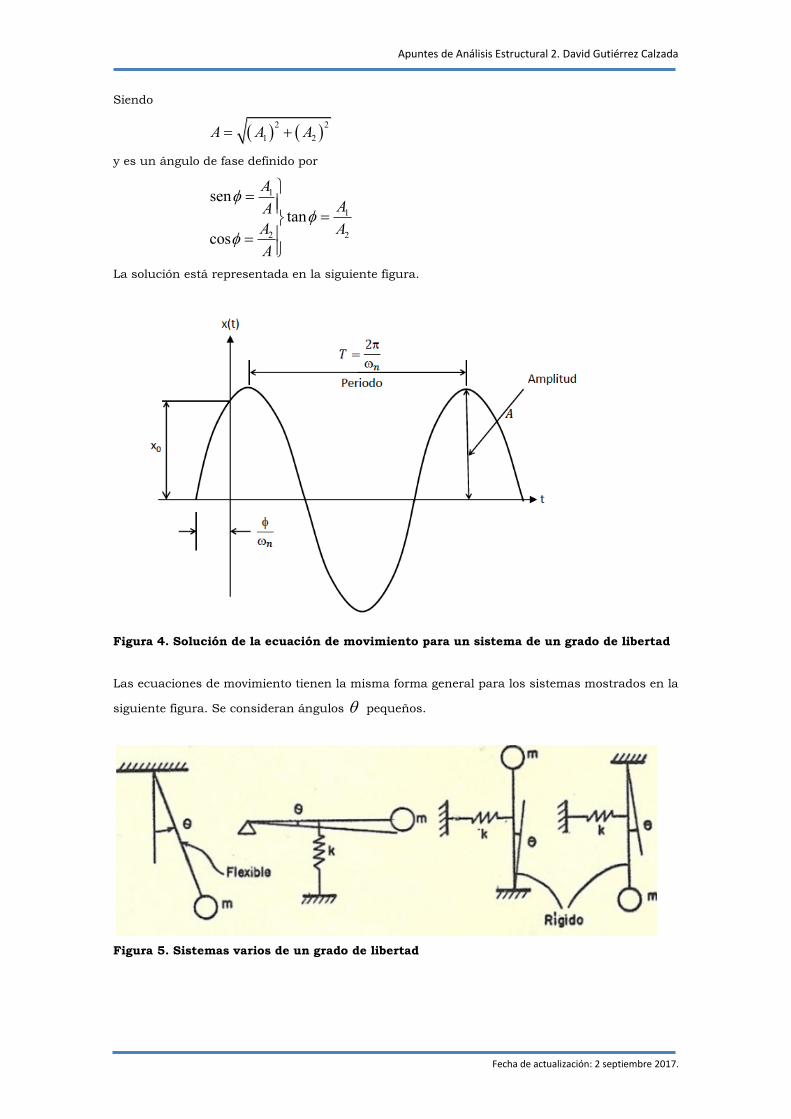
Siendo
2 2
1 2A A A
y es un ángulo de fase definido por
1
1
2 2
sen
tan
cos
A
AA
A A
A
La solución está representada en la siguiente figura.
Figura 4. Solución de la ecuación de movimiento para un sistema de un grado de libertad
Las ecuaciones de movimiento tienen la misma forma general para los sistemas mostrados en la
siguiente figura. Se consideran ángulos pequeños.
Figura 5. Sistemas varios de un grado de libertad

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Figura 6. Ecuaciones diferenciales de movimiento para algunos sistemas de un grado de
libertad
Amortiguamiento
El amortiguamiento es el proceso causante de que un movimiento vibratorio disminuya su
amplitud con el tiempo. Su origen puede ser diverso: por rozamiento de dos superficies, como
consecuencia de la fricción interna o histéresis del propio material, entre otras.
Para aproximar las distintas formas de amortiguamiento es habitual en dinámica
estructural emplear un amortiguamiento viscoso. En este caso la fuerza amortiguadora es
proporcional a la velocidad
aF cx
donde la constante c de amortiguamiento equivalente es tal que origina la misma disipación de
energía que la producida por el amortiguamiento real de la estructura.
Vibraciones libres de sistemas amortiguados
La figura 7 esquematiza un sistema de un grado de libertad con amortiguamiento viscoso.
Figura 7. Sistema de un grado de libertad con amortiguamiento viscoso. Equilibrio de
fuerzas.
La ecuación del movimiento viene definida en este caso por:
0mx cx kx
0c k
x x xm m
m
kx(t)
mk x
m xcc x

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
0c k
x x xm m
Resolviendo la ecuación suponiendo la solución de la forma tx t e se tiene que:
tx t e , 2 tx t e
Sustituyendo
2 0t t tc ke e e
m m
factorizando te
2 0c k
m m
Resolviendo
2
4 1
2 1
c c k
m m mx
2 2
2 2
1 4
2 4 2 4
c c k c c kx
m m m m m m
La solución a esta ecuación tiene la forma:
1 2 1 2
t t t t tx t C e C e e C e C e
1 221 2
ct
r t r tmx t e C e C e
con
2
1,2 24
c kr
m m
donde 1 2 C y C se calculan de nuevo a partir de las condiciones iniciales.
La respuesta del sistema depende del valor de 1r y 2r . Se pueden distinguir los siguientes casos:
1. Si
2
24
c k
m m las raíces 1r y 2r son reales. El sistema está sobreamortiguado y tiende
exponencialmente a su posición de equilibrio sin oscilar (figura 8).
2. Si 1 2 0r r se dice que el sistema está críticamente amortiguado, ya que tiende a la
posición de equilibrio en el menor tiempo posible. Esto sucede para un valor crítico de la
constante de amortiguamiento, crc , dado por:
2
2 4 2
4
crcr n
c kc km m
m m
La relación entre la constante de amortiguamiento de un sistema y la constante de
amortiguamiento crítico se denomina factor de amortiguamiento
2cr n
c c
c m

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
3. Si
2
24
c k
m m , es decir, si
crc c , las raíces1r y
2r son complejas y el sistema vibra con
amplitud decreciente hacia su posición de equilibrio (figura 9) siendo un sistema
subamortiguado. La respuesta del sistema adopta entonces la forma:
21 2cos sen
ct
md dx t e C t C t
22
21
4d n
k c
m m
donde d es la frecuencia natural amortiguada. Dado que en estructuras el factor de
amortiguamiento de las estructuras suele ser inferior a 0.1, se verifica que d n , es decir, la
frecuencia de oscilación libre del sistema no va a depender de su amortiguamiento.
Figura 8. Respuesta de un sistema sobreamortiguado
Figura 9. Respuesta de un sistema subamortiguado
x(t
)
t
x(t)
t

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Cálculo estimado del amortiguamiento
De forma experimental se puede aproximar la razón de amortiguamiento para un sistema
subamortiguado a partir de la respuesta en el tiempo del sistema.
Se introduce el término de decremento logarítmico, , expresado como el logaritmo natural
del cociente entre dos amplitudes consecutivas en su movimiento decreciente.
1
2
xLn
x
sustituyendo la ecuación de movimiento
2
2
1
por lo que
2 24
Si consideramos que el amortiguamiento es muy pequeño, entonces 21 1 obteniéndose
2
T=Periodo
x1 x2

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Vibraciones forzadas
Se estudia el caso de un sistema amortiguado de un grado de libertad sometido a una fuerza
excitadora de tipo armónico
senoF t F t
según se muestra en la figura 10.
Figura 10. Sistema de un grado de libertad sometido a carga armónica. Equilibrio de
fuerzas.
La ecuación diferencial de movimiento está dada por:
mx t cx t kx t F t
F t
x t x t x tm
22
F sen t
x t x t x tm
2 02
cuya solución es la suma de la solución de la ecuación homogénea y una solución particular
dela completa,
h px t x t x t
donde la solución de la ecuación homogénea está dada por
2 cos sen cos senct
tmh d d d dx t e A t B t e A t B t
con
d21
y la solución particular está dada por:
px C sen t D cos t
px C cos t D sen t
px C sen t D cos t2 2
F
C sen t D cos t C cos t D sen t C sen t D cos t sen tm
2 2 2 02
m
kx(t)
mk x
m xcc x
F(t) F(t)

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
F
D C sen t C D cos t sen tm
2 2 2 2 02 2
como k
m2 entonces
km
2
F
D C sen t C D cos t sen tk
22 2 2 2 02 2
D C FC sen t D cos t sen t
k
2 2 2 2 20
2 2 2 2 2
2 2
FD C sen t C D cos t sen t
k
2 2
02 1 2 1
FD C
k
2
02 1
C D
2
2 1 0por lo que
D
C
2
1
2
DF
Dk
2
2
0
1
2 1
2
DDF
k
22 2
2
0
14
2 2
FD
kD
022 2
2
2
4 1
F FC
k k
2 2
0 02 22 22 2
2 2
1 12
2 4 1 4 1
px C sen t D cos t
p
Fx sen t cos t
k
2
022 2
2
11 2
4 1

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
si
r
p
Fx r sen t r cos t
k r r
2022 2 2
11 2
4 1
Y la solución general es:
h px x x
td d
Fx t e A cos t B sen t r sen t r cos t
k r r
2022 2 2
11 2
4 1
y una solución particular en la forma alternativa sería:
2 2
sen sen
1 2
o
p
n n
F
kx t t X t
El comportamiento del término hx t corresponde a la respuesta transitoria del sistema. En
sistemas amortiguados esta vibración desaparece al cabo de un cierto tiempo y depende de las
condiciones iniciales de velocidad y desplazamiento.
El término px t define la respuesta en régimen permanente. En este caso la vibración
no desaparece hasta que cesa la excitación exterior. Puesto que en la ecuación px t
mostrada, /oF k corresponde a la respuesta del sistema para una carga estática de amplitud
oF , se define el coeficiente de amplificación dinámica o factor dinámico de carga como la
relación entre las respuestas dinámica y estática del sistema (a una excitación de la misma
amplitud)
22 2
1
/
1 2
o est
n n
X X
F k X
En la figura 11 se muestra la evolución con la frecuencia excitadora de este coeficiente.
Se distinguen tres zonas:

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
- n : cuando 0 la fuerza aplicada es cuasi-estática y por tanto la
respuesta coincide con la estática. A medida que aumenta, el sistema comienza a vibrar en
respuesta a la fuerza aplicada, aumentando la amplificación según la frecuencia excitadora se
aproxima al valor de la frecuencia natural del sistema. El papel que juega el amortiguamiento es
doble: por un lado disminuye la amplificación de la respuesta y por otro produce un incremento
en el desfase .
- 0 : en esta zona se produce la máxima amplificación de la respuesta. Esto
ocurre para una frecuencia de excitación
21 2n
que prácticamente coincide conn para los valores habituales del amortiguamiento 0.1 .
La amplificación obtenida para esta frecuencia es
2max
1 1
22 1 2est
X
X
- n : según aumenta el valor de la frecuencia de excitación al
sistema le resulta imposible seguir las oscilaciones inducidas por la acción exterior, por lo que
tiende a permanecer en reposo
0est
X
X
Figura 11. Coeficiente de amplificación dinámica

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Ejemplo:
Considere un sistema de un grado de libertad (SDF) con las siguientes propiedades:
2kip-sm .
in0 2533 ,
kipk in
10 , rad. seg
6 283 , nT seg1 y
.0 05
Determine la respuesta x t de este sistema sometido a la excitación
F t sen t kips
.10
0 6.
Solución:
Se tiene entonces la ecuación diferencial de movimiento
mx cx kx F t
F tx x x
m22 con F t F sen t0
tsen
.x x xm
210
0 62
tsen
.x . . x . x.
210
0 62 0 05 6 283 6 2830 2533
x . x . x . sen . t0 6283 39 476089 39 476089 5 235987
Cuya solución está dada por:
h px x x
Para la solución complementaria
th d dx e A cos t B sen t
. thx e A cos . t B sen . t0 314161 6 2754 6 2754
con d .21 6 2754
Para la solución particular

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
p
F Fx sen t cos t
k k
2
0 02 22 2 2 2
2 2
1 2
1 4 1 4
p
Fx r sen t r cos t
k r r
2022 2 2
11 2
1 4
Cociente de frecuencias
.r .
.
5 23590 8333
6 283
p
. . .x sen . t cos . t
. . . . . .
2
2 22 2 2 2 2 2
1 0 833310 10 2 0 05 0 83335 236 5 236
10 101 0 8333 4 0 05 0 8333 1 0 8333 4 0 05 0 8333
px . sen . t . . cos . t. . .
2
22 2 2
10 11 0 8333 5 236 2 0 05 0 8333 5 236
10 1 0 8333 4 0 05 0 8333
px . . sen . t . cos . t9 968940 0 305564 5 236 0 083333 5 236
px . sen . t . cos . t3 046087 5 236 0 8307421 5 236
La solución es:
. t
h px x x e A cos . t B sen . t . sen . t . cos . t0 314161 6 2754 6 2754 3 046087 5 236 0 8307421 5 236
sujeta a las condiciones iniciales x x00 0 y x v00 0 para obtener A y B
Recordando que
td d
Fx t e A cos t B sen t r sen t r cos t
k r r
2022 2 2
11 2
1 4
sustituyendo las condiciones iniciales
Fx e A r x
k r r
0 0022 2 2
10 2
1 4
FA x r
k r r
00 22 2 2
12
1 4

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
t td d d d n d d
Fx t e A sen t B cos t e A cos t B sen t r cos t r sen t
k r r
2022 2 2
1 21 4
d
Fx e B e A r v
k r r
0 0 20022 2 2
0 11 4
d d d
Av FB r
k r r
20 022 2 2
11 4
por lo que la solución quedaría como, con A y B de las expresiones anteriores:
. tx t e A cos . t B sen . t . sen . t . cos . t0 314161 6 2754 6 2754 3 046087 5 236 0 8307421 5 236

Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Ejercicios de sistemas masa-resorte:
Movimiento libre no amortiguado
Resuelva los siguientes ejercicios:
1. Se fija un contrapeso de 4lb a un resorte cuya constante es 16 lb/pie. ¿Cuál es el
periodo del movimiento armónico simple?
Solución
El periodo es:
T2
y la frecuencia circular k
m
16
432
2. Al fijar un contrapeso de 24lb al extremo de un resorte, lo estira 4 pulg. Determine la
ecuación de movimiento cuando el contrapeso se suelta y parte del reposo desde un
punto que está 3 pulg arriba de la posición de equilibrio.
1. Una fuerza de 400N estira 2m un resorte. Después, al extremo de ese resorte se fija una
masa de 50 kg y parte de la posición de equilibrio a una velocidad de 10 m/s hacia
arriba. Deduzca la ecuación de movimiento.
2. Un contrapeso de 8 lb, fijo a un resorte, tiene movimiento armónico simple. Deduzca la
ecuación de movimiento si la constante del resorte es de 1 lb/pie y el contrapeso parte 6
pulg abajo del punto de equilibrio, con una velocidad de (3/2) pie/s hacia abajo.
Exprese la solución en la forma alternativa.
3. Un contrapeso de 50kg (Peso) está unido al extremo de un resorte y lo estira 0.5m. Si
parte de una posición 10cm sobre la posición de equilibrio, con una velocidad de 1m/s
hacia abajo.
a. Deduzca la ecuación de movimiento
b. ¿Cuáles son la amplitud y el periodo del movimiento
c. ¿Cuántas oscilaciones completas habrá hecho el contrapeso a los 3
segundos?
d. ¿En qué momento pasa el contrapeso por la posición de equilibrio al ir hacia
abajo por segunda vez?
e. ¿En qué momento alcanza el contrapeso su desplazamiento extremo en ambos
lados de la posición de equilibrio?
f. ¿Cuál es la posición del contrapeso cuando t=3seg?
g. ¿Cuál es la velocidad instantánea cuando t=3seg?
h. ¿Cuál es su aceleración cuando t=3seg?
i. ¿Cuál es la velocidad instantánea al pasar por la posición de equilibrio?
j. ¿En qué momentos está a 2cm debajo de la posición de equilibrio?
k. ¿En qué momentos está 2cm debajo de la posición de equilibrio y se mueve
hacia arriba?
Apuntes de Análisis Estructural 2. David Gutiérrez Calzada
Fecha de actualización: 2 septiembre 2017.
Movimiento libre amortiguado
Resuelva los siguientes ejercicios:
4. Un resorte de 4 pies alcanza 8 pies al colgarle un contrapeso de 8 lb. El medio a través
del cual se mueve ofrece una resistencia numéricamente igual a 2 veces su velocidad
instantánea. Deduzca la ecuación de movimiento si el contrapeso se suelta de la
posición de equilibrio con una velocidad de 5 pie/s hacia abajo. Calcule el tiempo en
que llega a su desplazamiento extremo respecto a la posición de equilibrio. ¿Cuál es su
posición en ese instante?
5. Una masa de 1 kg está unida a un resorte cuya constante es 16 N/m y todo el sistema
se sumerge en un líquido que imparte una fuerza de amortiguamiento numéricamente
igual a 10 veces la velocidad instantánea. Formule las ecuaciones de movimiento si:
a. El contrapeso se suelta, partiendo del reposo a 1 m debajo de la posición de
equilibrio
b. El contrapeso se suelta 1m debajo de la posición de equilibrio con una
velocidad de 12m/s
6. Al unir un contrapeso de 10lb a un resorte, éste se estira 2 pies. El contrapeso también
está unido a un amortiguador, que ofrece una resistencia numéricamente igual a b
veces la velocidad instantánea 0 .
Calcule los valores de la constante de amortiguamiento b para que el movimiento que
se produce sea
a. Sobre amortiguado
b. Críticamente amortiguado
c. Sub amortiguado


















