
REPÚBLICA BOLIVARIANA DE VENEZUELA LA...
96
REPÚBLICA BOLIVARIANA DE VENEZUELA LA UNIVERSIDAD DEL ZULIA FACULTAD DE INGENIERÍA DIVISION DE ESTUDIOS PARA GRADUADOS INGENIERIA ESTRUCTURAL EFECTO DE LA RIGIDEZ Y EL AMORTIGUAMIENTO DE LA INTERFASE SUELO ESTRUCTURA EN LA RESPUESTA SÍSMICA DE EDIFICIOS TRABAJO DE GRADO PARA OPTAR AL TÍTULO DE MAGÍSTER SCIEMTIARUM EN INGENIERÍA ESTRUCTURAL Presentado por: Ing. RINCÓN MÉNDEZ, Carlos B. Profesor Asesor: Ing. Antonio Sarcos Portillo Maracaibo, Febrero 2003
-
Upload
hoangthuan -
Category
Documents
-
view
245 -
download
0
Transcript of REPÚBLICA BOLIVARIANA DE VENEZUELA LA...

REPÚBLICA BOLIVARIANA DE VENEZUELA LA UNIVERSIDAD DEL ZULIA
FACULTAD DE INGENIERÍA DIVISION DE ESTUDIOS PARA GRADUADOS
INGENIERIA ESTRUCTURAL
EFECTO DE LA RIGIDEZ Y EL AMORTIGUAMIENTO DE LA INTERFASE SUELO ESTRUCTURA EN LA RESPUESTA
SÍSMICA DE EDIFICIOS
TRABAJO DE GRADO PARA OPTAR AL TÍTULO DE MAGÍSTER SCIEMTIARUM EN INGENIERÍA ESTRUCTURAL
Presentado por: Ing. RINCÓN MÉNDEZ, Carlos B.
Profesor Asesor: Ing. Antonio Sarcos Portillo
Maracaibo, Febrero 2003

EFECTO DE LA RIGIDEZ Y EL AMORTIGUAMIENTO DE LA INTERFASE SUELO ESTRUCTURA EN LA RESPUESTA SÍSMICA DE EDIFICIOS
Presentado por:
___________________________________________ Ing. RINCÓN MÉNDEZ, Carlos B.
C.I. No. V–3.775.470
Profesor Asesor:
___________________________________________ Ing. Antonio Sarcos Portillo
C.I. No. V–5.162.900

Este jurado aprueba el Trabajo de Grado “EFECTO DE LA RIGIDEZ Y EL AMORTIGUAMIENTO
DE LA INTERFASE SUELO ESTRUCTURA EN LA RESPUESTA SÍSMICA DE EDIFICIOS ”, QUE el
ING. CARLOS B. RINCÓN MÉNDEZ, presenta al Consejo Técnico de la División de Estudios para
Graduados, Facultad de Ingeniería, Programa de Postgrado en Ingeniería Estructural, en
cumplimiento con los requisitos para optar al título de MAGÍSTER EN INGENIERIA
ESTRUCTURAL.
Maracaibo, Febrero de 2003
___________________________________________ Profesor Asesor
Ing. Antonio Sarcos Portillo. C.I. No. V–5.162.900
_________________________________________ Profesor Jurado
Ing. Antonio Cova Rios C.I. No. V–1.828.592
__________________________________________ Profesor Jurado
Ing. Cesar Vezga Taborda C.I. No. V–1.657.399
II
DEDICATORIA
A Dios nuestro Señor y a la Virgen, quienes me concedieron la fuerza, salud, dedicación y
sabiduría necesaria para vencer los obstáculos que en la vida se me han presentado y así, permitir
alcanzar el objetivo trazado.
A mi cuñado, colega, compañero, compadre, Ing. José Ramón Belandria Zambrano, quién en
vida, en la Facultad de Ingeniería y en el campo de la Ingeniería, compartimos inconvenientes y
disfrutamos los mejores momentos con nuestra familia y en la construcción de algunas obras de
ingeniería, que juntos pudimos realizar.
A mi querida Suegra Carmelina Zambrano de Belandria quien en vida siempre me apoyó y
estuvo presente en los acontecimientos y en las decisiones más importantes de mi carrera profesional.
III

AGRADECIMIENTO
A mi esposa, Elsa Inés Belandria, por su apoyo y tolerancia ante la fuerte dedicación requerida
para realizar los estudios.
A mis hijos, Carlos Luis, Carolina Coromoto, Vanessa María y Verónica Isabel, que son el
estímulo y la fuerza base para conseguir mis objetivos.
Al el Ing. José Antonio de la Hoz, (Jonathan), amigo y compañero de estudios en la
Universidad del Zulia y en el Postgrado de Ingeniería Estructural, por su apoyo incondicional a lo largo
del curso y quién durante quince años estuvo detrás de la apertura del Programa de Ingeniería
Estructural
A el Ing. Antonio Sarcos Portillo, Asesor de esta investigación, por su ayuda, conocimiento
aportado para la realización del mismo y por su iniciativa, dedicación y esfuerzos necesarios para
lograr que incluyeran dentro de los programas del Postgrado de Ingeniería, de la Universidad del
Zulia, el programa de Ingeniería Estructural.
A los profesores Cesar Vesga Taborda y Antonio Cova Rios, por su dedicación y aporte a la
enseñanza y práctica de la Ingeniería Estructural.
A mis compañeros del Post-Grado, Ing. Sebastián Delgado, Ing. Otto Rojas, Ing. Xiomara
Orozco, Ing. Roberto Ramirez, Ing. Rafael Mata, Ing. Simón Rodríguez, Ing. Caracciolo Villalobos.
Al Asesor de este trabajo de investigación, Prof. Antonio Sarcos Portillo, por su ayuda, conocimiento aportado para la realización del mismo.
Finalmente, el agradecimiento a todas las personas que hicieron posible que se realizara este trabajo.
Gracias...
IV

RESUMEN
RINCÓN MÉNDEZ, Carlos B. “EFECTO DE LA RIGIDEZ Y EL AMORTIGUAMIENTO DE LA INTERFASE SUELO ESTRUCTURA EN LA RESPUESTA SÍSMICA DE EDIFICIOS”. Trabajo de Grado. Maracaibo. Universidad del Zulia. Facultad de Ingeniería. División de estudios para graduados, Programa de Ingeniería Estructural. 2003. Desde el comienzo del siglo XX, hemos visto como los sismos o terremotos ocurridos en diferentes sitios del mundo han ocasionado grandes pérdidas de vidas y destrucción parcial o total de las edificaciones que allí se encuentran, es por ello que el hombre a través de la ciencia ha estudiado este fenómeno con más detalle, demostrándose en todas las situaciones que particularmente el daño estructural sufrido en los edificios durante un sismo se deriva de la respuesta de la estructura al movimiento telúrico impuesto en la base. Ya que la respuesta de un edificio sometido a excitación sísmica, tomando en cuenta la interacción suelo estructura, depende de varios factores los cuales podemos mencionar el tipo de suelo, características de la cimentación, materiales utilizados para edificación, entre otros, que intervienen directamente en la rigidez y el amortiguamiento de la interfase suelo-cimentación. Para ello, se ha propuesto evaluar el efecto de la rigidez y el amortiguamiento de la interfase suelo-estructura en la respuesta de edificios sometidos a una excitación sísmica, utilizando un análisis dinámico modal con interacción suelo-estructura y acelerogramas simulados en función de las cuatro formas espectrales recomendadas por las Normas COVENIN 1756-2001, en Venezuela que caracterizan la Rigidez del suelo en función de la velocidad promedio de las ondas de corte y su período dominante. Los resultados obtenidos se presentan en gráficos de desplazamiento, aceleración y corte basal máximo contra modulo cortante del suelo variando la relación del amortiguamiento para cada forma espectral.
V

ABSTRACT
RINCÓN MÉNDEZ, Carlos B. “THE EFFECT OF THE RIGIDITY AND THE DAMPING OF THE INTERFACE SOIL-STRUCTURE IN THE RESPONSE OF SUBJECTED BUILDINGS TO A SEISMIC”. Trabajo de Grado. Maracaibo. Universidad del Zulia. Facultad de Ingeniería. División de estudios para graduados, Programa de Ingeniería Estructural. 2003. From the beginning of the XX century, we have seen as the earthquakes happened in different places of the world they have caused big losses of lives and partial or total destruction of the constructions that there are, it is for it that the man through the science has studied this phenomenon with more detail, being demonstrated in all the situations that particularly the structural damage suffered in the buildings during an earthquake is derived of the response of the structure to the movement telluric tax in the base. Since the reaction of a subjected building to seismic excitement, taking into account the interaction soil-structure, it depends on several factors which can mention the soil type, characteristic of the foundation, materials used for construction, among other that intervene directly in the rigidity and the damping of the interface soil-foundation. For it, he/she has intended to evaluate the effect of the rigidity and the damping of the interface soil-structure in the structural response of buildings to a seismic excitation, using a modal dynamic analysis with interaction soil-structure and acelerogramas simulated in function in the four ghastly ways recommended by the Norms COVENIN 1756-2001, in Venezuela that you/they characterize the Rigidity of the soil, in function, of the speed average of the shear waves and their dominant period. The obtained results are presented in displacement graphics, acceleration and base shear maximum, versus the modulus shear of soil, varying the relationship of the damping for each spectral form.
VI

ÍNDICE GENERAL
pp. DEDICATORIA....................................................................................................................... III AGRADECIMIENTO ..............................................................................................................IV RESUMEN .................................................................................................................................V ABSTRAC…………………………………………………………………………………..VI INTRODUCCIÓN…………………………………………………………………………...1 CAPÍTULO I 1.1. PLANTEAMIENTO DEL PROBLEMA.......................................................................................3 1.2. FORMULACION DEL PROBLEMA ..........................................................................................5 1.3 .DELIMITACION DE LA INVESTIGACION.................................................................................5 1.4. JUSTIFICACION DE LA INVESTIGACION.........................................................................6 1.5. OBJETIVOS .........................................................................................................7
1.5.1. Objetivo general................................................................................................7 1.5.2. Objetivos específicos .........................................................................................7
CAPÍTULO II .......................................................................................................................... 9 2.1. ANALISIS DINAMICO DE PORTICOS PLANOS SOMETIDOS A
EXCITACIONES SISMICAS .........................................................................................9 2.1.1 Sistemas de un grado de libertad ........................................................................................9
2.1.2. Respuesta a movimientos del terreno...............................................................11 2.1.3. Metodo utilizado para evaluar la respuesta ....................................................14
2.2. ANALISIS DINAMICO DE ESTRUCTURAS Y SU APLICACIÓN AL ANALISIS
SISMICO................................................................................................................................18 2.2.1 Matriz de rigidez lateral considerando deformaciones por fuerza axial y por flexion.............23
2.2.1.1 Formacion de la matriz de rigidez de un elemento en coordenadas locales......................................................................24
2.2.1.2. Matriz de transformación de un sistema de coiordenadas locales a un sistema de coordenadas globales .............................26
2.2.1.3. Formación de la matriz de rigidez de la estructura.......................28
2.2.1.5 Formación de la matriz de rigidez lateral por condensación
estática de la matriz de rigidez global de la estructura................31 2.2.2 Vibración libre no amortiguada .................................................................................. 34
2.2.3 Análisis dinámico moda 37
VII

VIII
2.3. ANALISIS DINAMICO DE PORTICOS PLANOS TOMANDO EN CUENTA LA INTERACCION SUELO ESTRUCTURA. 42
2.3.2 Análisis modal en pórtico plano considerando interacción suelo-estructura. 47 2.3.3 Rigideces equivalentes de las cimentaciones 50 2.3.4 Amortiguamiento en Cimentaciones 53
CAPÍTULO III ....................................................................................................................... 54 3.1. PROGRAMA DE ANALISIS DINAMICO MODAL DE PORTICOS PLANOS
CON INTERACCION SUELO-ESTRUCTURA ......................................................... 55 3.2 GENERACION DE ACELEROGRAMAS SIMULADOS 57 3.3 CRITERIOS PARA LA SELECCIÓN DEL MODULO CORTANTE DEL SUELO 59 3.4 CRITERIOS DE SELECCIÓN DE LOS PORTICOS PARA EL ESTUDIO 64 3.5 VALIDACION DEL PROGRAMA REDISE CONSIDERANDO LOS EFECTOS DE
LA INTERACCION SUELO ESTRUCTURA 65 CAPÍTULO IV ……………………………………………………………………………73 4.1 RESULTADOS DE LA INVESTIGACION................................................................. 73 4.2 CONCLUSIONES............................................................................................................ 79 REFERENCIA .......................................................................................................................... 81 BIBLIOGRAFÍA……………………………………………………………………………83 APENDICES ………………………………………………………………………………85
INTRODUCCION
Desde el comienzo del siglo XX, hemos visto como los sismos o terremotos ocurridos en
diferentes sitios del mundo han ocasionado grandes pérdidas de vidas y destrucción parcial o total
de las edificaciones que allí se encuentran, es por ello que el hombre a través de la ciencia ha
estudiado este fenómeno con más detalle, demostrándose en todas las situaciones que
particularmente el daño estructural sufrido en los edificios durante un sismo se deriva de la
respuesta de la estructura al movimiento telúrico impuesto en la base. La respuesta de la estructura
excede a la excitación producida por el suelo, y esta manifestación dinámica depende de la duración
y frecuencia de la vibración, de las características del suelo, de la distancia al epicentro y de las
propiedades dinámicas de la estructura.
Las cargas producidas por el sismo son consideradas esencialmente cargas inerciales y
dependen tanto de la distorsión del suelo producidas por el movimiento, como de la resistencia
inercial de la estructura y su capacidad de disipar energía, resultando la magnitud de las cargas
debidas al sismo siempre función de la masa de la estructura.
La característica principal del comportamiento de las estructuras bajo la acción de los sismos
radica en la complejidad de la respuesta estructural bajo cargas dinámicas, debiendo diseñar las
estructuras para que no sufran daños en sismos leves, pocos daños en sismo de mediana magnitud
y ante sismos fuertes aunque se deterioren puedan salvaguardar la vida de los ocupantes.
Recientemente, en Venezuela, el diseño de edificaciones sismorresistentes se rige de
acuerdo con la Norma Venezolana COVENIN –1756-2001 la cual establece la necesidad de conocer
la respuesta sísmica en términos de desplazamiento, velocidad, aceleración, fuerzas y corte basal,
arrojadas al aplicar análisis dinámico, a estructuras que lo requieran, utilizando métodos de análisis
confiables, cuyos resultados puedan servir como base para proponer elementos estructurales,
materiales, dispositivos que puedan disminuir la respuesta y disposiciones de geometría acordes a
las necesidades del caso. Esto hace que la tendencia en el diseño para edificaciones
preferiblemente se realice aplicando un análisis dinámico.
2
El análisis dinámico de edificios se lleva normalmente a cabo suponiendo que el movimiento que
se aplica en su base, o las fuerzas estáticas equivalentes que obran en sus distintos niveles, son
independientes de las características de la cimentación. Sin embargo existen casos en que el
movimiento en cualquier punto de la frontera suelo-estructura es sensiblemente diferente del que
habría ocurrido en dicho punto si la estructura no estuviese presente; en estos casos se dice que
existe interacción suelo-estructura (I.S.E.) y será incluida en el análisis dinámico para el estudio de
esta investigación
Ya que la respuesta de un edificio sometido a excitación sísmica, tomando en cuenta la
interacción suelo estructura (I.S.E.), depende de varios factores los cuales podemos mencionar el
tipo de suelo, características de la cimentación, materiales utilizados para edificación, entre otros,
que intervienen directamente en la rigidez y el amortiguamiento de la interfase suelo-cimentación.
Para ello, se ha propuesto evaluar el efecto de la rigidez y el amortiguamiento de la interfase suelo-
estructura en la respuesta de edificios sometidos a una excitación sísmica.
El desarrollo de esta investigación se encuentra organizado en cuatro capítulos: el capítulo I
contiene el planteamiento del problema y los objetivos que se persiguen con la investigación. En el
capítulo II, se muestra el marco teórico referente al método utilizado para determinar la respuesta
sísmica mediante la aplicación de un análisis dinámico modal a pórticos planos, sometido a
excitaciones sísmicas, utilizando acelerogramas representativos de sismos reales o simulados. En
este capítulo, primero se reseña la formulación requerida para el análisis dinámico, bajo un esquema
matricial, sin considerar la interacción suelo-estructura, inmediatamente después, se presenta bajo el
mismo esquema, otra formulación que incorpora los efectos inducidos por dicha Interacción.
El capítulo III se presenta la aplicación del análisis dinámico modal con interacción suelo-
estructura a pórticos de edificios de concreto armado de 4, 8, 12 y 20 pisos, de tres vanos, utilizando
el programa de computación REDISE diseñado como parte de esta investigación para alcanzar el
objetivo. También, en este capítulo se establecen los criterios para la generación de acelerogramas
representativos de sismos reales y los criterios para la selección de la variabilidad del módulo de
cortante, finalmente, en el capítulo IV, se presenta el análisis de los resultados y las conclusiones.

CAPÍTULO I
1.1 PLANTEAMIENTO DEL PROBLEMA
Desde el comienzo del siglo XX, hemos visto como los sismos o terremotos ocurridos en
diferentes sitios del mundo han ocasionado grandes pérdidas de vidas y destrucción parcial o total
de las edificaciones que allí se encuentran, es por ello que el hombre a través de la ciencia ha
estudiado este fenómeno con más detalle, demostrándose en todas las situaciones que
particularmente el daño estructural sufrido en los edificios durante un sismo se deriva de la
respuesta de la estructura al movimiento telúrico impuesto en la base. La respuesta de la estructura
excede a la excitación producida por el suelo, y esta manifestación dinámica depende de la duración
y frecuencia de la vibración, de las características del suelo, de la distancia al epicentro y de las
propiedades dinámicas de la estructura.
Las cargas producidas por el sismo son consideradas esencialmente cargas inerciales y
dependen tanto de la distorsión del suelo producidas por el movimiento, como de la resistencia
inercial de la estructura y su capacidad de disipar energía, resultando la magnitud de las cargas
debidas al sismo siempre función de la masa de la estructura.
La característica principal del comportamiento de las estructuras bajo la acción de los sismos
radica en la complejidad de la respuesta estructural bajo cargas dinámicas, debiendo diseñar las
estructuras para que no sufran daños en sismos leves, pocos daños en sismo de mediana magnitud
y ante sismos fuertes aunque se deterioren puedan salvaguardar la vida de los ocupantes.

4
Recientemente, en Venezuela, el diseño de edificaciones sismorresistentes se rige de
acuerdo con la Norma Venezolana COVENIN –1756-2001 la cual establece la necesidad de conocer
la respuesta sísmica en términos de desplazamiento, velocidad, aceleración, fuerzas y corte basal,
arrojadas al aplicar análisis dinámico, a estructuras que lo requieran, utilizando métodos de análisis
confiables, cuyos resultados puedan servir como base para proponer elementos estructurales,
materiales, dispositivos que puedan disminuir la respuesta y disposiciones de geometría acordes a
las necesidades del caso. Esto hace que la tendencia en el diseño para edificaciones
preferiblemente se realice aplicando un análisis dinámico.
Se ha determinado que un análisis dinámico se realiza para conocer el verdadero
comportamiento de las estructuras ante un estímulo telúrico, que permita además de incluir el efecto
de la resonancia, conocida como el incremento de la amplitud de las vibraciones iniciales que pueda
dar lugar al colapso del sistema estructural analizado y determinar los máximos desplazamientos
verdaderos que permitan conocer la posible influencia en áreas circunvecinas.
El análisis dinámico de edificios se lleva normalmente a cabo suponiendo que el movimiento
que se aplica en su base, o las fuerzas estáticas equivalentes que obran en sus distintos niveles,
son independientes de las características de la cimentación. Sin embargo existen casos en que el
movimiento en cualquier punto de la frontera suelo-estructura es sensiblemente diferente del que
habría ocurrido en dicho punto si la estructura no estuviese presente; en estos casos se dice que
existe interacción suelo-estructura (I.S.E.), y será incluido en el análisis dinámico para el estudio de
esta investigación.
5
Ya que la respuesta de un edificio sometido a excitación sísmica, tomando en cuenta la
interacción suelo estructura (I.S.E.), depende de varios factores los cuales podemos mencionar el
tipo de suelo, características de la cimentación, materiales utilizados para edificación, entre otros,
que intervienen directamente en la rigidez y el amortiguamiento de la interfase suelo-cimentación.
Para ello, se ha propuesto evaluar el efecto de la rigidez y el amortiguamiento de la interfase suelo-
estructura en la respuesta de edificios sometidos a una excitación sísmica.
1.2 FORMULACION DEL PROBLEMA
Una vez planteado el problema para direccionar la investigación se hace necesario formular
dicha problemática con la siguiente pregunta:
¿La rigidez y el amortiguamiento de la interfase suelo-cimentación podría influenciar en la
respuesta de estructuras sometidas a excitación sísmica?
1.3 DELIMITACION DE LA INVESTIGACION
Dado que la realización del análisis dinámico puede llevarse a efecto mediante diferentes
métodos, con fundamentos teóricos establecidos y procedimientos a seguir distintos, resulta
necesario especificar que el método que se utilizará para realizar el análisis dinámico en esta
investigación es el método de análisis dinámico modal, utilizando acelerogramas representativos de
sismos reales, considerando la interacción suelo-estructura y tomando en cuenta el comportamiento
lineal de los materiales que los constituyen. Los resultados de este análisis son los desplazamientos,

6
velocidades, aceleraciones y fuerzas cortantes de los diferentes niveles de entrepiso, en cada
instante de tiempo.
El análisis dinámico se aplicará a edificios ortogonales de 4, 8, 12, y 20 pisos, mediante un
análisis dinámico modal, plano con Interacción Suelo–Estructura (ISE), contemplando un grado de
libertad por nivel, donde la coordenada de la respuesta modal es el desplazamiento lateral en la
dirección considerada. La Base de fundación, se considera infinitamente rígida (Empotrada) y el cual
estará influenciadas por la variabilidad del módulo cortante del suelo (G); para esta investigación los
datos suelo requeridos para considerar la interacción suelo estructura bajo el punto de vista
dinámico, se tomarán de suelos regulares considerando Zona Sísmica III según las Norma
Venezolana COVENIN 1756-2001, teniendo en cuenta que el coeficiente de Aceleración horizontal
recomendado esa zona, para así generar tres acelerogramas comprendidos dentro de las formas
espectrales elásticas y cuyos valores del módulo de cortante, cumplen para cada forma espectral,
con los parámetros dinámicos, como son la velocidad
1.4 JUSTIFICACION DE LA INVESTIGACION
Esta investigación se justifica porque al detectar la influencia de la rigidez y del
amortiguamiento de la interfase suelo-cimentación en la respuesta de estructuras sometidas a
excitación sísmica, podemos optimizar el diseño de los elementos que constituyen una edificación y
evaluar el mejor comportamiento estructural ante un sismo.
7
1.5 OBJETIVOS
1.5.1 OBJETIVO GENERAL
Este trabajo tiene como objetivo principal detectar la influencia de la rigidez y del
amortiguamiento de la interfase suelo-estructura en la respuesta de estructuras sometidas a
excitación sísmica.
1.5.2 OBJETIVOS ESPECIFICOS
Evaluar el comportamiento de Pórticos Planos de Concreto Armado con alturas de 4, 8, 12, y
20 pisos, tomando en cuenta la variación de la rigidez y el amortiguamiento de la interfase suelo-
estructura, considerando comportamiento lineal de los materiales y sometiendo al sistema estructural
a solicitaciones sísmicas., a través de acelerogramas, para ello se requiere:
Realizar un programa de computación, para evaluar pórticos planos, mediante un análisis
dinámico modal, bajo comportamiento lineal de los materiales, por métodos matriciales, que incluya
la incidencia del amortiguamiento y rigidez rotacional y traslacional de la interfase suelo-estructura,
en las matrices de Masa, Amortiguamiento y Rigidez del sistema estructural, utilizando bases de
datos de excitaciones sísmicas obtenidas a través de acelerogramas
8
Evaluar el comportamiento de Pórticos Planos de Concreto Armado con alturas de 4, 8 12, y
20 pisos, tomando en cuenta la variación de la rigidez y el amortiguamiento de la interfase suelo-
estructura, considerando comportamiento lineal de los materiales y sometiendo al sistema estructural
a solicitaciones sísmicas., a través de acelerogramas:
Analizar la respuesta mediante la representación Gráfica “Cortes Basales y desplazamientos
máximos”, sometidos a tres sismos diferentes, mediante un análisis dinámico modal, con
comportamiento lineal de los materiales

CAPÍTULO II
2.1 ANASLISIS DINAMICO DE PORTICOS PLANOS SOMETIDO A EXCITACIONES SISMICAS
El movimiento de una estructura sometida a excitaciones sísmicas puede ser expresado en
función de los modos normales de vibración y la respuesta total puede obtenerse mediante la
superposición de las soluciones modales independientes. Los modos normales pueden ser
utilizados para transformar el sistema de ecuaciones diferenciales acopladas en un nuevo conjunto
de ecuaciones diferenciales desacopladas, en la que cada ecuación contiene una sola variable
dependiente. Con el método de superposición modal el problema de encontrar la respuesta de un
sistema de múltiples grados de libertad se reduce, a determinar la respuesta de un sistema
independiente de un solo grado de libertad
2.1.1 SISTEMAS DE UN GRADO DE LIBERTAD
Como puede observarse en la Figura 2.1, el sistema representado esquemáticamente, está
constituido por una masa, m concentrada que puede tener un desplazamiento horizontal u, de un
pórtico empotrado en la base con un amortiguador viscoso. Cuando el terreno experimenta un
desplazamiento s que pude ser producido por una excitación sísmica, en la ecuación de equilibrio
dinámico aparece la fuerza de inercia, igual a la masa por la aceleración absoluta la fuerza de
rigidez y la de amortiguamiento. En el caso de este pórtico simple las fuerzas de rigidez y de
amortiguamiento son respectivamente proporcionales al desplazamiento u y a la velocidad de
..
x
.
u

10
la masa con respecto a su base. Sean k y c las correspondientes constantes de proporcionalidad
que se suponen que no cambian con respecto al tiempo; k representa la
u m
c
k/2k/2
s
Figura 0.1 Sistema de un pórtico simple con amortiguamiento viscoso de un grado de libertad
rigidez lateral del pórtico y c el coeficiente de amortiguamiento. El conjunto m, c y k
representado por el pórtico simple de la Figura 2.1, constituyen un sistema lineal de un grado de
libertad con amortiguamiento viscoso; utilizando el principio de D’ Alambert, la ecuación de equilibrio
dinámico es
0...
kuucxm (2.1)
Considerando que que x = u + s, la ecuación anterior se escribe
.....
smkuucum (2.2)

11
Dividiendo esta ecuación entre m y definiendo m
k , kmCcr *2 y
Ccr
c se
tiene:
..2
...
2 suuu (2.3)
se denomina frecuencia circular natural del sistema ; Ccr se conoce como
amortiguamiento crítico y es la fracción de amortiguamiento crítico, que usualmente se expresa
en porcentaje. De estas definiciones deducimos que mCcr 2 , lo cual muestra que el
amortiguamiento crítico está relacionado con la frecuencia de vibración del sistema.
2.1.2 RESPUESTA A MOVIMIENTOS DEL TERRENO
La ecuación 2.3 es una ecuación diferencial de 2do. Orden el cual representa el movimiento
expresado en términos del desplazamiento relativo de la base, producido por una excitación , que
a su vez, representa la variación de la aceleración del terreno con respecto al tiempo, conocida
como acelerograma. La solución de esta ecuación diferencial es la respuesta dinámica del sistema.
..
..
s
Cuando una estructura no está sometida a una excitación externa y su movimiento de la base
está gobernado solamente por las condiciones iniciales, se considera que está vibrando libremente,
el segundo término de la ecuación 2.3 , es igual a cero. s
12
02 2...
uuu (2.4)
Ecuación diferencial lineal homogénea de 2do. Orden cuya solución viene expresada por
)cos)0()0()0(
(
.
tutsenuu
eu ddd
tn
( 2.5 )
donde y son la velocidad y el desplazamiento en el punto de inicio del
movimiento y
)0(.
u
d
)0(u
las frecuencias de las oscilaciones amortiguadas igual a:
21 d ( 2.6 )
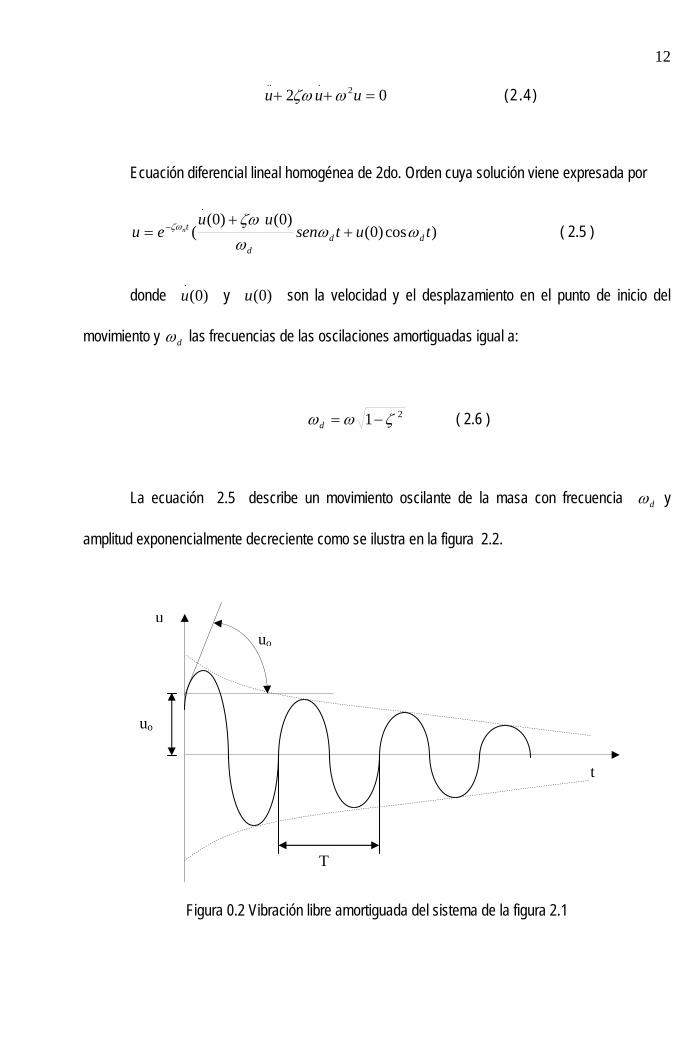
La ecuación 2.5 describe un movimiento oscilante de la masa con frecuencia d y
amplitud exponencialmente decreciente como se ilustra en la figura 2.2.
t
u.
o
T
u
uo
Figura 0.2 Vibración libre amortiguada del sistema de la figura 2.1

13
Cuando el segundo término de la ecuación 2.3 , es distinto de cero la respuesta del
sistema está dada por la solución de la ecuación homogénea , ecuación 2.5 más la solución
particular el cual viene representada por:
..
s
dtsenestu dt
d
))(()(1
)( )(..
( 2.7 )
Esta expresión hace ver que, en el caso de vibraciones libres, las dos propiedades de un
sistema de un grado de libertad que determinan su respuesta ante un movimiento prescrito del
terreno son su frecuencia natural y su fracción de amortiguamiento crítico. La velocidad y la
aceleración de la masa se calculan derivando sucesivamente la ecuación 2.7 con respecto al tiempo
de tal manera que la velocidad queda expresada por:
dtestu dt ))(cos()()( )(
...
( 2.8 )
y la aceleración absoluta se obtiene despreciando el termino central del lado izquierdo de la
ecuación 2.3 el cual resulta:
dtsenestu d
t
d
))(()()( )(..2
( 2.9 )

14
2.1.3 METODO UTILIZADO PARA EVALUAR LA RESPUESTA
El método utilizado para la solución de la ecuación diferencial de movimiento es una
alternativa al método de solución que proporciona la integral representada en la ecuación 2.7
conocida como la integral de Duhamel. El proceso de solución de este método requiere, por
conveniencia, conocer la excitación sísmica a intervalos iguales de tiempo . Generalmente la
excitación sísmica representada por un acelerograma, describe una función discreta a intervalos
iguales de tiempo. La respuesta se calcula considerando las condiciones iniciales de cada intervalo
de tiempo , la excitación se supone lineal durante estos intervalos de tiempo. Las condiciones
iniciales son, en este caso, el desplazamiento y la velocidad al término del intervalo de tiempo
anterior. Suponiendo que la excitación es aproximada por una función de segmentos lineales,
como se muestra en la figura 2.3, podemos expresar esta función por
t
t
)(tF
11)(
ii
ii F
t
ttF
t
tttF tttt ii ( 2.10 )
en la cual para intervalos iguales de tiempo, donde titi ,....3,2,1i
La ecuación diferencial del movimiento, ecuación 2.2 viene, entonces, dada por
1
...
1
ii
ii F
t
ttF
t
ttkuucum tttt ii ( 2.11 )

15
t-i-1 t ti+1
F(ti-1 )
F(t )F(ti+1)
�
ttti
F()
t
F
F(ti)
F(ti-1)
F(t)
Figura 2.3 Función de excitación representada por segmentos lineales
La solución de esta ecuación diferencial lineal de 2do. Orden, puede expresarse como la
solución complementaria obtenida de la ecuación homogénea haciendo el segundo término de la
ecuación 2.11 igual a cero, y la solución particular , o sea
cu
pu
pc uuu ( 2.12 )
La solución complementaria en general para el intervalo de tiempo tttt ii es
))()(cos()(idiidi
ttc ttsenDttCeu in ( 2.13 )

16
Por otra parte la solución particular de la ecuación 2.11 toma la forma
)( iiip ttABu ( 2.14 )
que aplicada a la ecuación 2.11 da
11
ii
ii
iiii Ft
ttF
t
ttttABkcA ( 2.15 )
Estableciendo la identidad de los coeficientes y resolviendo las ecuaciones resultantes da:
tk
FFA ii
i
1 ( 2.16 )
k
cAFB ii
i
( 2.17 )
Si en la ecuación 2.12 sustituimos la solución complementaria y la particular, ecuaciones
2.13 y 2.14, resulta
)())()(cos()(iiiidiidi
tt ttABttsenDttCeu in ( 2.18 )
La velocidad viene dada por la derivada de esta ecuación, como

17
iidiididiidtt AttsenDCttCDeu in )()(cos)(
.
(2.19 )
Las constantes y se obtienen de las ecuaciones 2.18 y 2.19 introduciendo las
condiciones iniciales de desplazamiento y velocidad al comienzo del intervalo, esto es en el instante
despejando de las relaciones resultantes tenemos
iC iD
it
iii BuC d
iiii
CAuD
.
( 2.20 )
El cálculo de las ecuaciones 2.18 y 2.19 en el instante nos da el
desplazamiento y la velocidad en el instante esto es
ttt ii 1
1it
))cos(1 tABtsenDtCeu iididit
in
( 2.21 )
idddidddit
i AtsentCtsentDeu n coscos1
.
( 2.22)
Finalmente, la aceleración en el instante ttt ii 1 se obtiene directamente después de
aplicar e de las ecuaciones 2.21 y 2.22 , en la ecuación diferencial 1iu 1
.
iu
)(...
tFkuucum ( 2.23 )
resulta

18
11
.
11
..
)/1( iiii kuucFmu ( 2.24 )
2.2 ANÁLISIS DINAMICO DE ESTRUCTURAS Y SU APLICACIÓN AL ANALISIS SISMICO
Cuando el efecto producido en una estructura es una excitación que proviene del
movimiento del terreno, como es el caso de los efectos sísmicos, que se manifiestan en movimientos
del terreno que varían en función del tiempo y que inciden directamente en la respuesta de la
estructura, se hace necesario que estos efectos sean considerados en un análisis dinámico.
Con la finalidad de aplicar el análisis dinámico, cuando la excitación proviene del movimiento
del terreno, se considera como ejemplo, un pórtico plano de un edificio (Figura 2.2), con entrepisos
regularmente constantes y de masa concentradas. Se desprecian los desplazamientos verticales por
ser muy pequeños comparados con los horizontales, y los desplazamientos rotacionales por su
configuración de entrepisos regularmente uniformes, que producen que los giros de los nodos sean
casi nulos, tomándose en cuanta un grado de libertad por piso como desplazamiento horizontal.
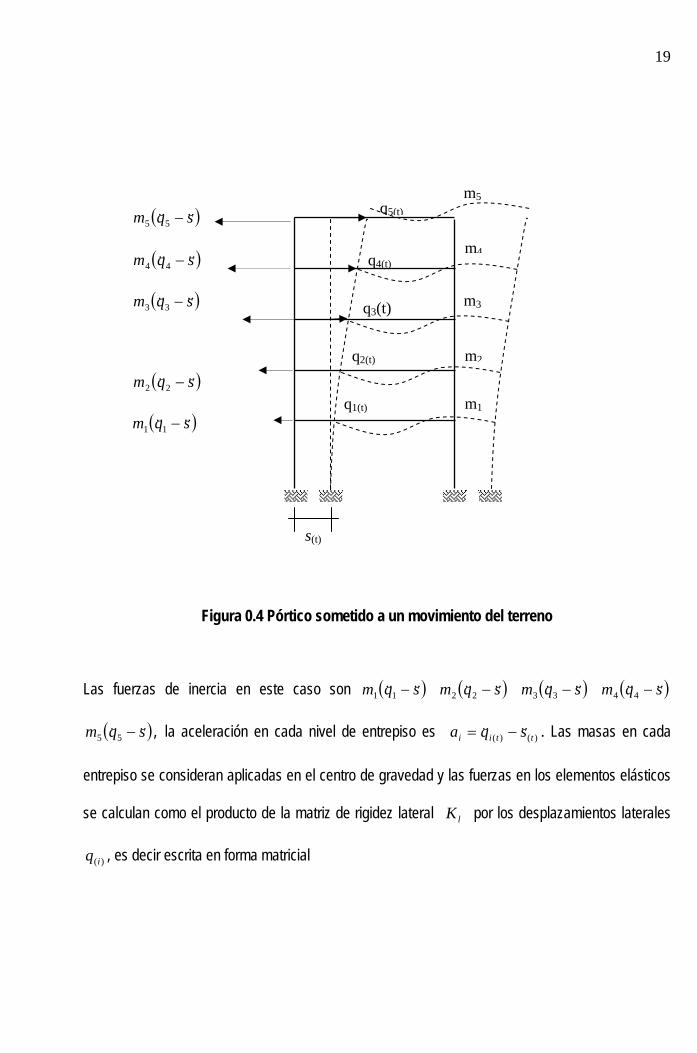
Como puede observarse en la Figura 2.4, el sistema es de 5 grados de libertad, sometido a
un desplazamiento del terreno y fundación debido a la excitación del suelo producida por un
terremoto, y este desplazamiento causa en cada nivel, desplazamientos relativos de las masas con
respecto al terreno .
)(tS
)(tiq
19
s(t)
q5(t)
q4(t)
q3(t)
q2(t)
q1(t)
m5
sqm 55
sqm 44
sqm 33
sqm 22
m4
m3
m2
sqm 11 m1
Figura 0.4 Pórtico sometido a un movimiento del terreno
Las fuerzas de inercia en este caso son sqm 11 sqm 22 sqm 33 sqm 44
, la aceleración en cada nivel de entrepiso es sqm 55 )(ts)(tii qa . Las masas en cada
entrepiso se consideran aplicadas en el centro de gravedad y las fuerzas en los elementos elásticos
se calculan como el producto de la matriz de rigidez lateral por los desplazamientos laterales
, es decir escrita en forma matricial
lK
)(iq

20
qKFe
donde, para el caso del pórtico representado en la figura 2.2 es
5554535251
4544434241
3534333231
2524232221
1514131211
kkkkk
kkkkk
kkkkk
kkkkk
kkkkk
K
donde jiij kk
5
4
3
2
1
e
e
e
e
e
e
F
F
F
FF
F
5
4
3
2
1
q
q
q
q
De forma análoga las fuerzas de amortiguamiento viscoso se pueden expresar como el
producto de una matriz de amortiguamiento por las velocidades, o sea escrita matricialmente,
qCFc ( 2.25 )

21
donde el punto denota la primera derivada del desplazamiento , con respecto al tiempo. Para
cada masa la suma de todas las fuerzas debe ser cero. Así se llega a la ecuación de equilibrio
dinámico matricial:
q
SMqKqCqM (0.26)
donde M y C son respectivamente, la matriz de masa y de amortiguamiento del sistema, el cual
para el caso del pórtico mostrado en la figura 2.4
5
4
3
2
1
0000
0000
0000
0000
0000
m
m
m
m
m
M
5
4
3
2
1
0000
0000
0000
0000
0000
c
c
c
c
c
C
y la matriz s es el producto de la aceleración del terreno por un vector unitario definido por el
número de grados de libertad laterales del sistema, esto es
s
1
1
1
1
1
sS
s
s
s
s
s
S
A diferencia de las matrices de masa y amortiguamiento, no se ha establecido ninguna
hipótesis sobre las deformaciones a ser consideradas en la matriz de rigidez lateral del sistema ,
de modo que pueden o no, depreciarse las deformaciones por fuerza axial en las vigas y las
lK
22
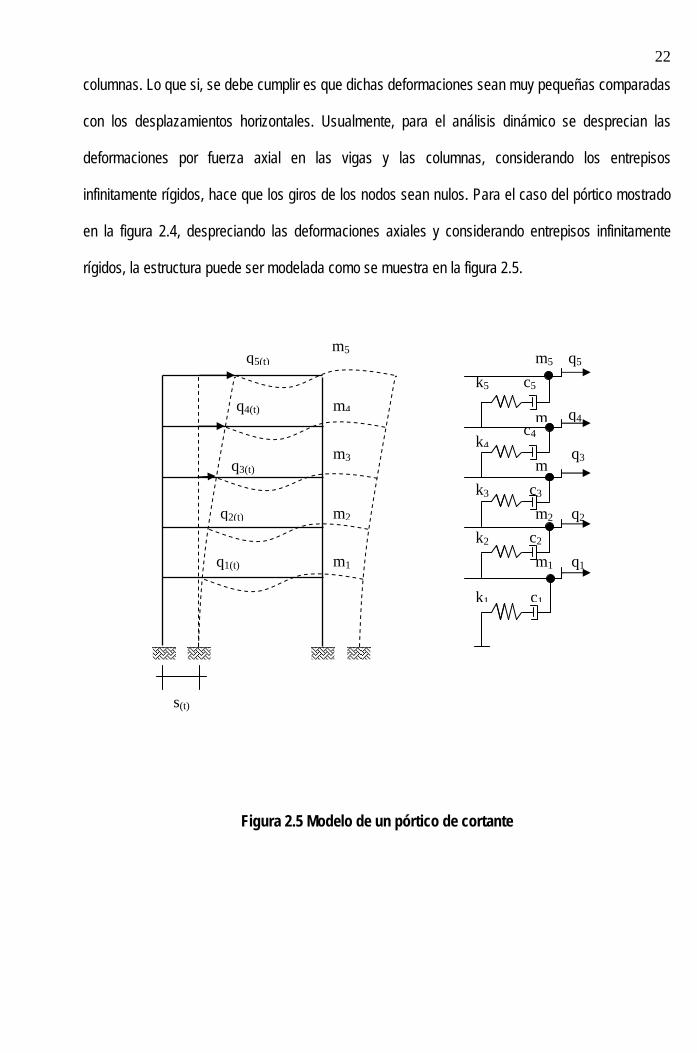
columnas. Lo que si, se debe cumplir es que dichas deformaciones sean muy pequeñas comparadas
con los desplazamientos horizontales. Usualmente, para el análisis dinámico se desprecian las
deformaciones por fuerza axial en las vigas y las columnas, considerando los entrepisos
infinitamente rígidos, hace que los giros de los nodos sean nulos. Para el caso del pórtico mostrado
en la figura 2.4, despreciando las deformaciones axiales y considerando entrepisos infinitamente
rígidos, la estructura puede ser modelada como se muestra en la figura 2.5.
m5 q5(t) m5 q5
k5 c5
s(t)
q4(t)
q3(t)
q2(t)
q1(t)
m4
m3
m2
m1
k1
k2
k3
k4
m1
m2
m
m q4 c4
q3
c3
q2
c2
q1
c1
Figura 2.5 Modelo de un pórtico de cortante
23
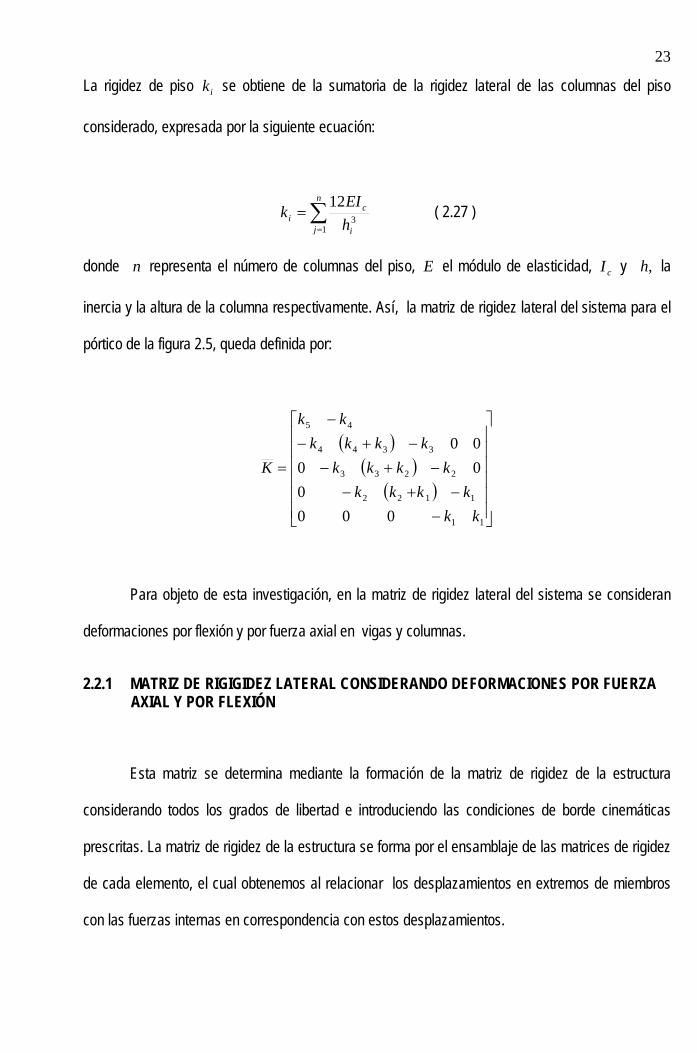
La rigidez de piso se obtiene de la sumatoria de la rigidez lateral de las columnas del piso
considerado, expresada por la siguiente ecuación:
ik
n
j i
ci h
EIk
13
12 ( 2.27 )
donde representa el número de columnas del piso, n E el módulo de elasticidad, y la
inercia y la altura de la columna respectivamente. Así, la matriz de rigidez lateral del sistema para el
pórtico de la figura 2.5, queda definida por:
cI ,h
11
1122
2233
3344
45
000
0
00
00
kk
kkkk
kkkk
kkkk
kk
K
Para objeto de esta investigación, en la matriz de rigidez lateral del sistema se consideran
deformaciones por flexión y por fuerza axial en vigas y columnas.
2.2.1 MATRIZ DE RIGIGIDEZ LATERAL CONSIDERANDO DEFORMACIONES POR FUERZA AXIAL Y POR FLEXIÓN
Esta matriz se determina mediante la formación de la matriz de rigidez de la estructura
considerando todos los grados de libertad e introduciendo las condiciones de borde cinemáticas
prescritas. La matriz de rigidez de la estructura se forma por el ensamblaje de las matrices de rigidez
de cada elemento, el cual obtenemos al relacionar los desplazamientos en extremos de miembros
con las fuerzas internas en correspondencia con estos desplazamientos.

24
y
s6,v6
s1,v1 i j
x s4,v4 s3,v3 s5,v5 s2,v2
L
2.2.1.1 FORMACION DE LA MATRIZ DE RIGIDEZ DE UN ELEMENTO EN COORDENADAS LOCALES
Para la formación de esta matriz se considera un elemento prismático de una estructura
plana, de sección constante como se muestra en la figura 2.6, donde se representa en un sistema
bidimensional local de coordenadas, dextrogiro, un elemento, las fuerzas y los desplazamientos
que actúan en sus extremos.
pS
pv
Figura 2.6 Fuerzas y desplazamientos en extremos de un miembro prismático, de sección constante, perteneciente a una estructura plana, en un sistema local de coordenadas
Para un comportamiento linealmente elástico estas fuerzas y desplazamientos están
relacionados entre sí, mediante una matriz que se conoce como matriz de rigidez del elemento pk
que escrita en forma matricial es ppp vkS
25
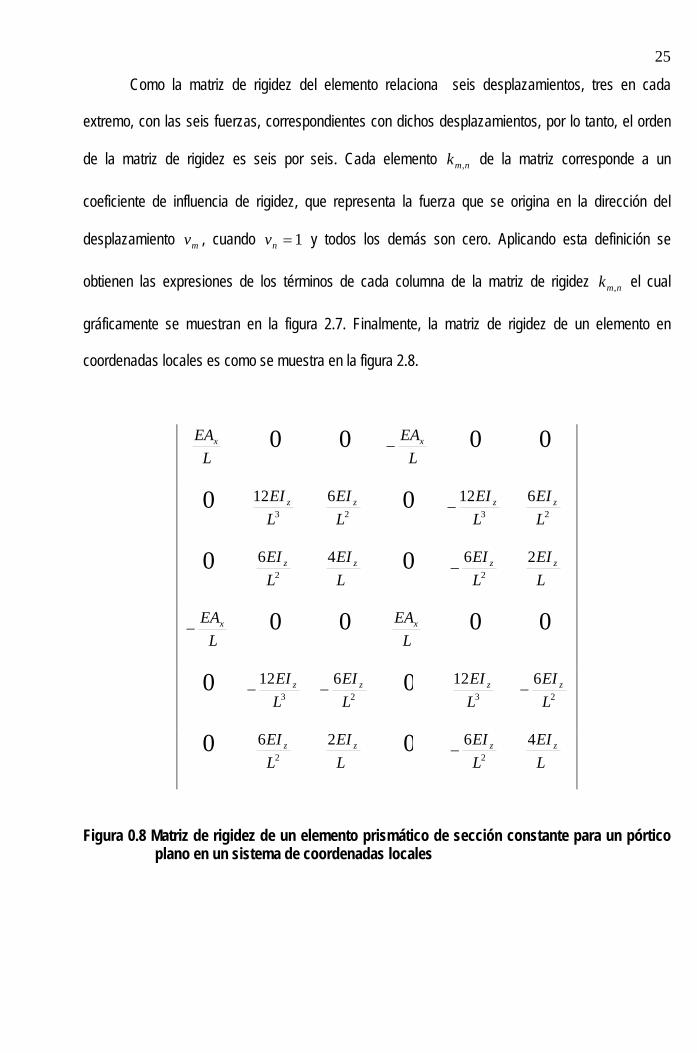
Como la matriz de rigidez del elemento relaciona seis desplazamientos, tres en cada
extremo, con las seis fuerzas, correspondientes con dichos desplazamientos, por lo tanto, el orden
de la matriz de rigidez es seis por seis. Cada elemento de la matriz corresponde a un
coeficiente de influencia de rigidez, que representa la fuerza que se origina en la dirección del
desplazamiento , cuando
nmk ,
mv 1nv y todos los demás son cero. Aplicando esta definición se
obtienen las expresiones de los términos de cada columna de la matriz de rigidez el cual
gráficamente se muestran en la figura 2.7. Finalmente, la matriz de rigidez de un elemento en
coordenadas locales es como se muestra en la figura 2.8.
nmk ,
L
EAx 0 0 L
EAx 0 0
0 3
12
L
EI z 2
6
L
EI z 0 3
12
L
EI z 2
6
L
EI z
0 2
6
L
EI z L
EI z4 0
2
6
L
EI z L
EI z2
L
EAx 0 0 L
EAx 0 0
0 3
12
L
EI z 2
6
L
EI z 0 3
12
L
EI z 2
6
L
EI z
0 2
6
L
EI z L
EI z2 0
2
6
L
EI z L
EI z4
Figura 0.8 Matriz de rigidez de un elemento prismático de sección constante para un pórtico plano en un sistema de coordenadas locales
26
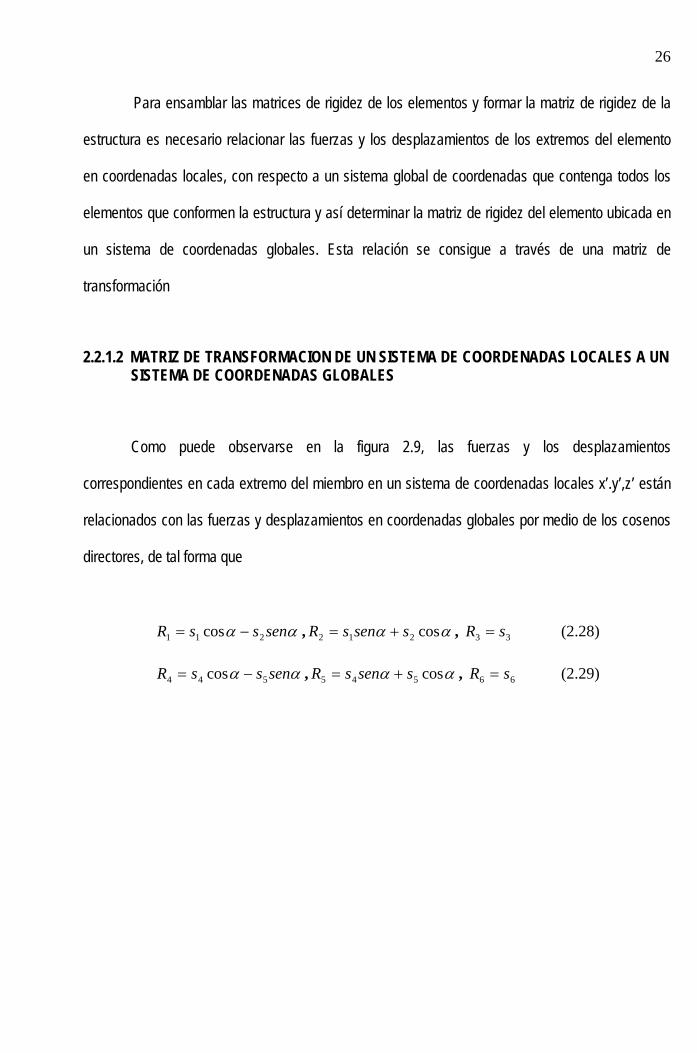
Para ensamblar las matrices de rigidez de los elementos y formar la matriz de rigidez de la
estructura es necesario relacionar las fuerzas y los desplazamientos de los extremos del elemento
en coordenadas locales, con respecto a un sistema global de coordenadas que contenga todos los
elementos que conformen la estructura y así determinar la matriz de rigidez del elemento ubicada en
un sistema de coordenadas globales. Esta relación se consigue a través de una matriz de
transformación
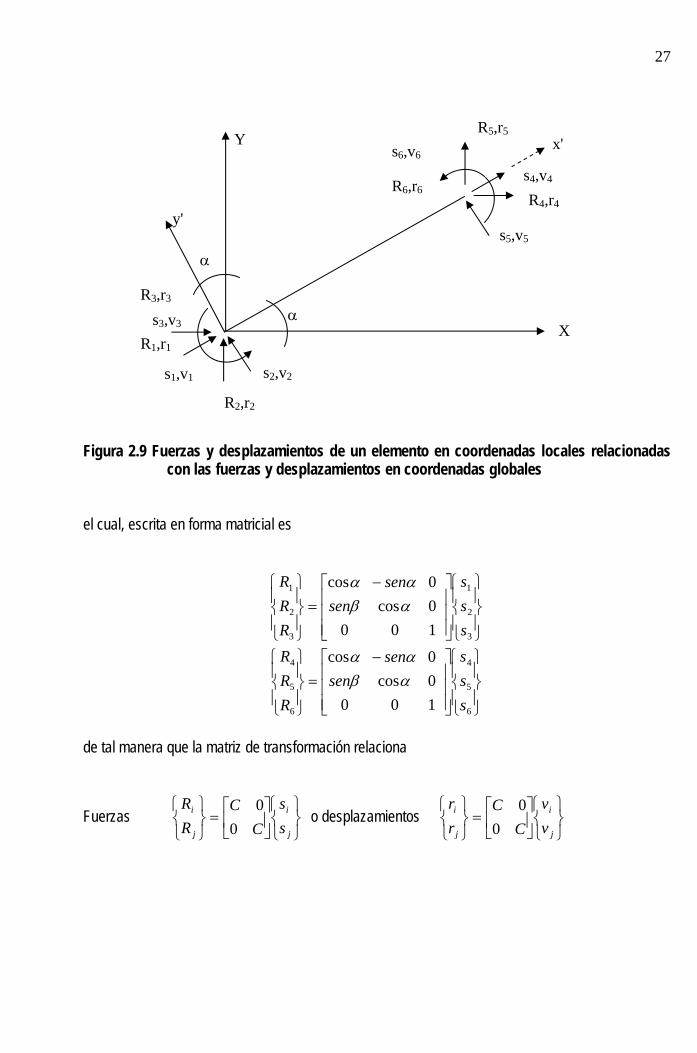
2.2.1.2 MATRIZ DE TRANSFORMACION DE UN SISTEMA DE COORDENADAS LOCALES A UN SISTEMA DE COORDENADAS GLOBALES
Como puede observarse en la figura 2.9, las fuerzas y los desplazamientos
correspondientes en cada extremo del miembro en un sistema de coordenadas locales x’.y’,z’ están
relacionados con las fuerzas y desplazamientos en coordenadas globales por medio de los cosenos
directores, de tal forma que
senssR 211 cos , cos212 ssensR , 33 sR (2.28)
senssR 544 cos , cos545 ssensR , 66 sR (2.29)
27
R5,r5
s4,v4
R4,r4
s5,v5
s6,v6
R6,r6
Y x'
y'
R3,r3
s3,v3
s1,v1 s2,v2
R1,r1
R2,r2
X
Figura 2.9 Fuerzas y desplazamientos de un elemento en coordenadas locales relacionadas con las fuerzas y desplazamientos en coordenadas globales
el cual, escrita en forma matricial es
3
2
1
3
2
1
1
0
0
0
cos
0
cos
s
s
ssen
sen
R
R
R
6
5
4
6
5
4
1
0
0
0
cos
0
cos
s
s
ssen
sen
R
R
R
de tal manera que la matriz de transformación relaciona
Fuerzas o desplazamientos
j
i
j
i
s
s
C
C
R
R
0
0
j
i
j
i
v
v
C
C
r
r
0
0

28
Por lo tanto STR y vTr , por la característica de la matriz de transformación se puede
demostrar que TTT 1 , conociendo que ppp vkS operando las matrices obtenemos
ppT
p rTkTR donde se están relacionando los desplazamientos en coordenadas globales
correspondientes a las fuerzas aplicadas en la dirección de estos desplazamientos, a través de la
matriz de rigidez del elemento en coordenadas globales, el cual se obtiene como
TkTK pT
p ( 2.30 )
2.2.1.3 FORMACION DE LA MATRIZ DE RIGIDEZ DE LA ESTRUCTURA
Formada la matriz de rigidez en coordenadas globales de cada elemento, simplemente
ubicamos las matrices de cada elemento dentro de una matriz, en función de su conectividad,
tomando en cuenta los grados de libertad por nodo, según sea el tipo de estructura. En el caso de
una estructura plana, se consideran 3 grados de libertad por nodo, desplazamiento horizontal,
desplazamiento vertical y la rotación en dirección perpendicular al plano. La matriz de rigidez global
de la estructura es una matriz cuadrada, de banda simétrica, características que es aprovechada en
computación para disminuir la cantidad de memoria requerida. La matriz de rigidez global de la
estructura se forma colocando directamente los coeficientes de cada matriz de rigidez del elemento
en una matriz en banda, donde la diagonal principal de la matriz de rigidez del elemento es
almacenada en la primera columna de la matriz de rigidez de la estructura, la diagonal próxima en la
segunda columna y así sucesivamente. El ensamblaje se hace solo para elementos en el triángulo
superior debido a la simetría.

29
En estructuras bidimensionales puede obtenerse fácilmente una fórmula para el semiancho
de banda, NBW. Como ejemplo se toma un elemento que pertenece a un pórtico plano conectado a
los nodos 2 y 4. Los grados de libertad son 4,5,6,10,11 y 12. Entonces los coeficientes de la matriz
de rigidez del elemento, se ubicarán dentro de la matriz de rigidez de la estructura como se muestra
en la figura 2.8. Se observa que entre los grados 12 y 4, existe 9 posiciones diferentes de cero, que
también se obtiene de los números que se conectan 1243 m . En general,
13 jim la mayor separación m se denomina semiancho de banda NBW. Para lograr
eficiencia con respecto a la memoria de almacenamiento requerida en un programa de computación,
se recomienda numerar los nodos de los elementos de tal manera que la diferencia de los nodos sea
la mínima. Formada la matriz de rigidez global de la estructura, en su forma normal de orden
qq xNN donde es el número de ecuaciones independientes del sistema, que se obtiene por
la relación , 3 son los grados de libertad por nodo, para un pórtico plano y es el
número total de nodos, o
qN
NN3Nq NN
xNWBNq donde es el semiancho de banda, esta matriz es
singular, dado que físicamente no se han introducido las condiciones de borde cinemáticas, no está
apoyada, es cinenematicamente inestable. Esto implica que se deben introducir las condiciones de
borde cinemáticas para poder resolver el sistema.
NWB

30
1 2 3 4 5 6 7 8 9 10 11 12 . . N 1 2 3 x x x x x x 4 x x x x x 5 x x x x 6 7 8 9 x x x 10 x x 11 x 12 . . N
Figura 0.10 Ubicación de los coeficientes de una matriz de rigidez de un elemento dentro de
la matriz de rigidez global de la estructura, según su conectividad
2.2.1.4 INTRODUCCION DE LAS CONDICIONES DE BORDE CINEMATICAS PRESCRITAS
Existen varios métodos para introducir las condiciones de borde cinemáticas prescritas, el
enfoque de penalización, el enfoque de eliminación y colocando ceros todos los coeficientes de las
filas y columnas que correspondan con un grado cinemático prescrito y un uno, en la diagonal
correspondiente, en el caso de la matriz de rigidez global de la estructura ensamblada en forma de
banda, se colocan ceros en todos los coeficientes correspondientes a la fila y un uno, en el primer
coeficiente de dicha fila. Como se trata de un sistema de ecuaciones, las fuerzas en
correspondencia con esos desplazamientos prescritos, en coordenadas globales, también deben ser
modificadas. En la fila de la matriz de carga, en el caso de haber varias condiciones de carga,
correspondiente con el desplazamiento prescrito, se colocará el valor de dicho desplazamiento.
31
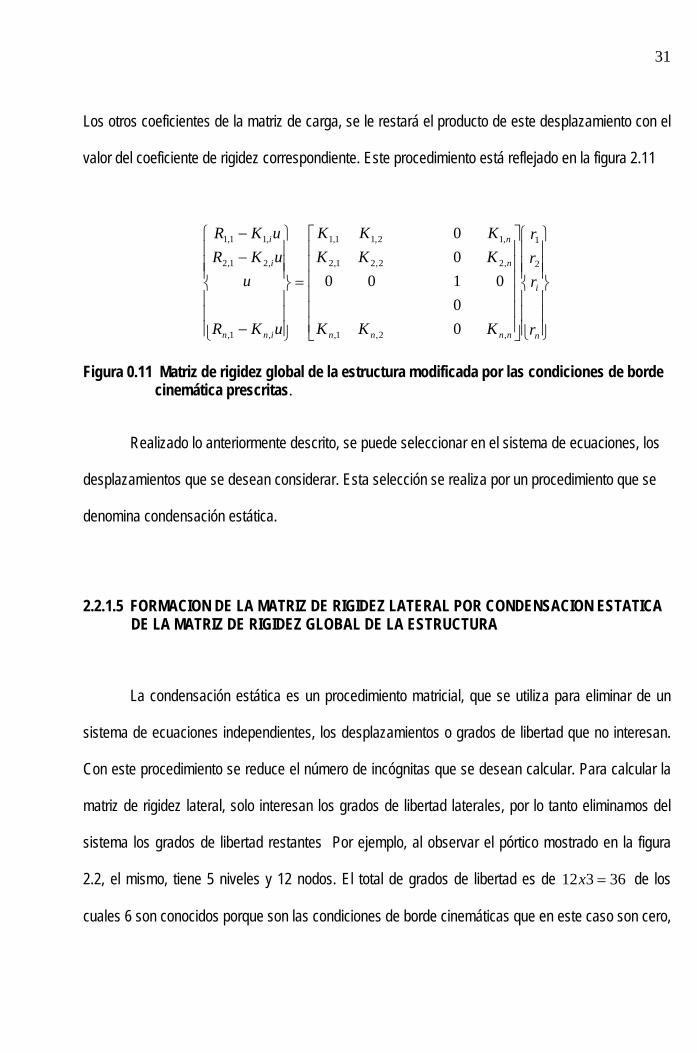
Los otros coeficientes de la matriz de carga, se le restará el producto de este desplazamiento con el
valor del coeficiente de rigidez correspondiente. Este procedimiento está reflejado en la figura 2.11
n
i
nnnn
n
n
inn
i
i
r
r
r
r
KKK
KKK
KKK
uKR
u
uKR
uKR
2
1
,2,1,
,22,21,2
,12,11,1
,1,
,21,2
,11,1
0
0
0100
0
0
Figura 0.11 Matriz de rigidez global de la estructura modificada por las condiciones de borde cinemática prescritas.
Realizado lo anteriormente descrito, se puede seleccionar en el sistema de ecuaciones, los
desplazamientos que se desean considerar. Esta selección se realiza por un procedimiento que se
denomina condensación estática.
2.2.1.5 FORMACION DE LA MATRIZ DE RIGIDEZ LATERAL POR CONDENSACION ESTATICA DE LA MATRIZ DE RIGIDEZ GLOBAL DE LA ESTRUCTURA
La condensación estática es un procedimiento matricial, que se utiliza para eliminar de un
sistema de ecuaciones independientes, los desplazamientos o grados de libertad que no interesan.
Con este procedimiento se reduce el número de incógnitas que se desean calcular. Para calcular la
matriz de rigidez lateral, solo interesan los grados de libertad laterales, por lo tanto eliminamos del
sistema los grados de libertad restantes Por ejemplo, al observar el pórtico mostrado en la figura
2.2, el mismo, tiene 5 niveles y 12 nodos. El total de grados de libertad es de 36312 x de los
cuales 6 son conocidos porque son las condiciones de borde cinemáticas que en este caso son cero,

32
restan 30 grados de libertad. Como solo interesan los grados de libertad laterales que son 5, el
sistema de ecuaciones se reduce de a un sistema de . 3030x 55x
El procedimiento de agrupación de los grados de libertad laterales se realiza desplazando
las filas, bien sea ubicándolas al comienzo de la matriz, o al final. En primera instancia parece, que
desplazar las filas fuese suficiente, pero es necesario también, desplazar las columnas. Hay que
recordar que las columnas de la matriz de rigidez se obtienes por coeficientes de influencia y es lo
que hace por equilibrio, que la matriz de rigidez sea de naturaleza cuadrada, la cual, se debe
conservar.
Si se representa el sistema de ecuaciones matricial ,en submatrices, tenemos: R rK
l
r
jjij
jiii
l r
r
KK
KK
R ,,
,,0
En forma expandida resullta
ljirii rKrK ,,0 ( 2.32 )
ljjrijl rKrKR ,, ( 2.33 )
de la primera ecuación matricial despejamos rr y se obtiene:
ljiiir rKKr ,1
, ( 2.34 )

33
sustituyendo este valor en la segunda ecuación , se tiene
ljjljiiiijl rKrKKKR ,,1
,, ( 2.35 )
agrupando términos,
ljjjiiiijl rKKKKR ,,1
,, ( 2.36 )
donde, la matriz de rigidez lateral queda representada por el producto matricial
jjjiiiijl KKKKK ,,1
,, ( 2.37 )
Este procedimiento de obtención de la matriz de rigidez, de la inversión de una matriz de un
tamaño considerable, ya que el orden contiene los grados de libertad que no se requieren. Esto
conlleva a utilizar un método de inversión de matrices de fácil manejo computacional como es del de
Gauss Jordan.

34
2.2.2 VIBRACION LIBRE NO AMORTIGUADA
Para resolver el sistema de ecuaciones diferenciales representado por la ecuación 2.3
conviene considera primero el caso de vibración más simple en la que no existe amortiguamiento,
con lo cual dicha ecuación se convierte en:
0 qKqM ( 2.38 )
Toda estructura elástica puede vibrar libremente en forma tal que el desplazamiento de cada
una de sus masas con respecto a su posición de equilibrio estático es igual al producto de una
función de la posición de la masa considerada por una función del tiempo, que es la misma para
todas las masas. En otras palabras, los desplazamientos se pueden expresar como
)(.)( ttq ( 2.39 )
Para el caso de la figura 2.2
)(
)(
)(
)(
)(
5
4
3
2
1
tq
tq
tq
tq
tq
q
)(
)(
)(
)(
)(
5
4
3
2
1
t
t
t
t
t
5
4
3
2
1
Se dice que una estructura de esa manera vibra en sus modos naturales; el conjunto de
valores i (que son constantes independientes de ) matriz modal y el período de la función del t

35
tiempo )(t , en caso de existir, se llama período natural. Si derivamos consecutivamente la
ecuación 2.15 tenemos,
.q y .q
Sustituyendo estas ecuaciones en la ecuación 2.14
0 KM ( 2.40 )
Para la masa i el desarrollo de esta última expresión da,
0.... ,
j
jjiii km ( 2.41 )
en donde
ii
jiji
m
k
.
., El primer miembro de esta ecuación es función de , mientras el segundo
no, por lo tanto ambos deben ser constantes para que la igualdad subsista. Si se llama a ese
valor constante, se obtiene:
t
2
0.2 La solución de esta ecuación diferencial homogénea es:

36
)(. tsenA ( 2.42 )
De acuerdo con lo anterior existen modos de vibración que satisfacen las condiciones de la
expresión 2.15 , estos son tales que el movimiento de cada masa es armónico simple con período
natural .2
T , se llama frecuencia natural circular. Derivando dos veces la ecuación 2.18 se
tiene,
.)(.. 22 tsenA
Sustituyendo este valor en la ecuación 2.16 y considerando que o , queda
0.2 MK ( 2.43 )
Que es un sistema de ecuaciones diferenciales lineales homogéneo. Para que existan
valores de distintos de cero es necesario que el determinante del sistema se anule, esto es.
0.2 MK
La ecuación 2.19 representa un problema de autovalores y autovectores propios, es un
problema matemático donde son los autovalores y 2 los autovectores. Para cada autovalor
existe un autovector que satisface la ecuación 2.19

37
Existen varios métodos para determinar los autovalores y autovectores aplicando métodos
numéricos, como es el método de Jacobi que es el que se utiliza para propósito de esta
investigación.
2.2.3 ANALISIS DINAMICO MODAL
El análisis modal aprovecha las propiedades de los modos de vibración para reducir el
problema de resolver un sistema acoplado de ecuaciones diferenciales al de ecuaciones
diferenciales desacopladas. El concepto fundamental es que en instante dado, los desplazamientos
de las masas de un sistema de varios grados de libertad pueden expresarse como la suma de los
desplazamientos debidos a la participación de cada uno de los modos naturales, puesto que los
mismos constituyen un conjunto completo; esto es:
n n
)(.)( ttq ( 2.44 )
)(tq Vector de desplazamientos relativos a la base de las masas en el instante t
)(t Vector que contiene los elementos de una función escalar que expresa con respecto al
tiempo la participación del modo j
Matriz modal cuya j-ésima columna es el modo j
Si derivamos consecutivamente la ecuación 2.14 tenemos,
.q y .q
Sustituyendo estas ecuaciones en la ecuación 2.3

38
SMKCM ( 2.45 )
Premultiplicando esta ecuación por t
SMKCM tttt ( 2.46 )
Gracias a las propiedades de ortogonalidad de los modos se tiene
*MMt *CCt *KKt
donde las matrices *
M *C
*K son diagonales.
Sustituyendo estas matrices en la ecuación 2.16 resulta:
SMKCM t *** ( 2.47 )
Como los términos fuera de la diagonal de las matrices transformadas son nulos, la fila j del
sistema de ecuaciones diferenciales 2.23 resulta:
SMtktctm tjjjjjjj
)()()( *** ( 2.48 )
*jm y se llaman masa, amortiguamiento y rigidez generalizados en el modo *
jc *jk j y están
dadas por:

39
jtjj Mm * j
tjj Cc * j
tjj Kk * Si dividimos la ecuación 2.24 entre y definimos
como
*jm
*
*
j
jj m
k **2 jjj mkCcr y
j
jj Ccr
c*
obtenemos,
)(
1)()(2)(
*
2 tsm
Mttt
j
tj
jjjjjj
( 2.49 )
Es de interés comparar la ecuación 2.25 con la ecuación 2.4 derivada para un sistema de un grado
de libertad, que se repetirá a continuación:
..2
...
2 suuu
Como se trata de ecuaciones diferenciales lineales, de esta comparación se desprende que, para el
mismo acelerograma , )(ts )(tj es igual al desplazamiento de la masa de un sistema simple de
un grado de libertad con frecuencia j y fracción de amortiguamiento crítico j
multiplicado por el siguiente factor:
jtj
tj
j M
M
1
( 2.50 )
En términos de cantidades escalares j se expresa:
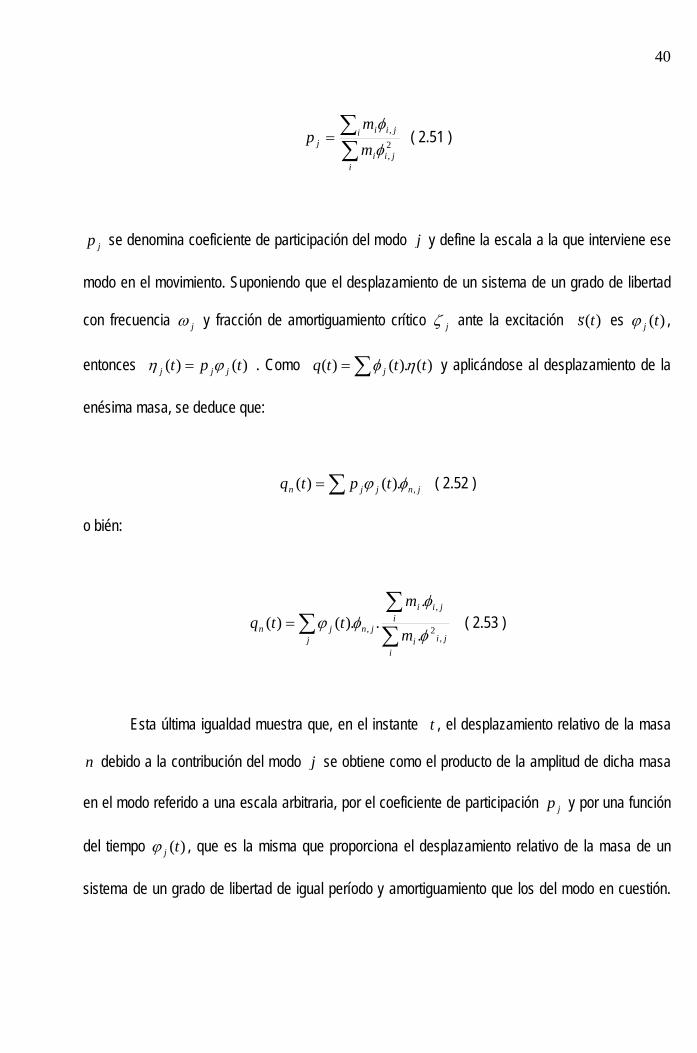
40
ijii
i jii
j m
mp
2,
,
( 2.51 )
jp se denomina coeficiente de participación del modo j y define la escala a la que interviene ese
modo en el movimiento. Suponiendo que el desplazamiento de un sistema de un grado de libertad
con frecuencia j y fracción de amortiguamiento crítico j ante la excitación es )(ts )(tj ,
entonces )(( tp jjj )t . Como )(t.)()( ttq j y aplicándose al desplazamiento de la
enésima masa, se deduce que:
jnjjn tptq ,.)()( ( 2.52 )
o bién:
i
jii
ijii
jnj
jn m
mttq
,2
,
, .
...)()(
( 2.53 )
Esta última igualdad muestra que, en el instante , el desplazamiento relativo de la masa
debido a la contribución del modo
t
n j se obtiene como el producto de la amplitud de dicha masa
en el modo referido a una escala arbitraria, por el coeficiente de participación y por una función
del tiempo
jp
)(tj , que es la misma que proporciona el desplazamiento relativo de la masa de un
sistema de un grado de libertad de igual período y amortiguamiento que los del modo en cuestión.
41
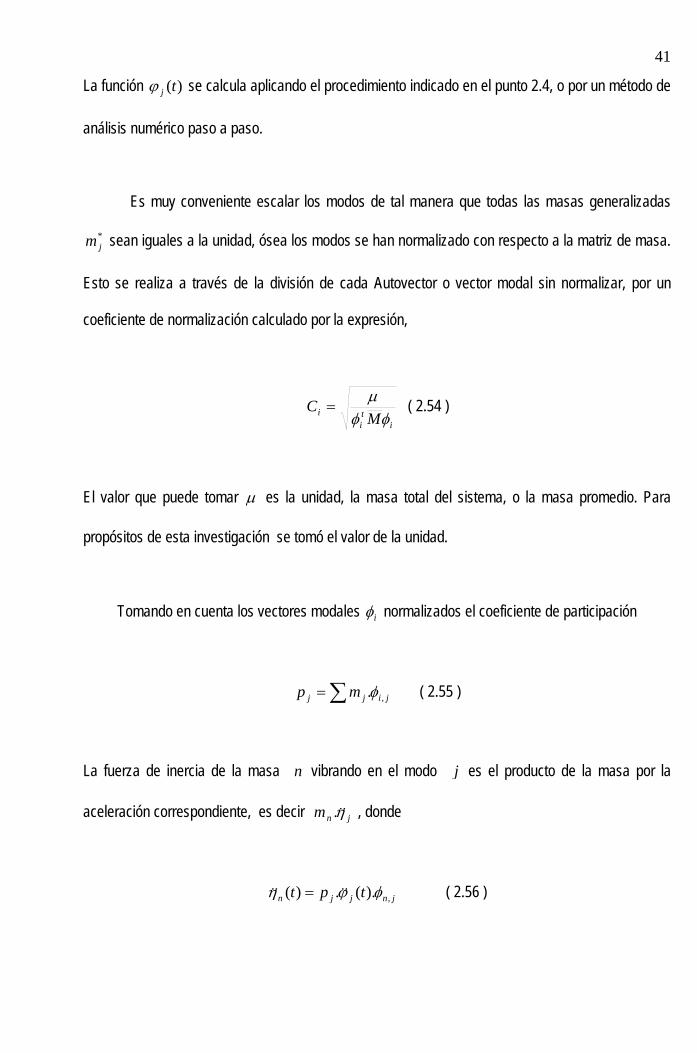
La función )(tj se calcula aplicando el procedimiento indicado en el punto 2.4, o por un método de
análisis numérico paso a paso.
Es muy conveniente escalar los modos de tal manera que todas las masas generalizadas
sean iguales a la unidad, ósea los modos se han normalizado con respecto a la matriz de masa.
Esto se realiza a través de la división de cada Autovector o vector modal sin normalizar, por un
coeficiente de normalización calculado por la expresión,
*jm
iti
i MC
( 2.54 )
El valor que puede tomar es la unidad, la masa total del sistema, o la masa promedio. Para
propósitos de esta investigación se tomó el valor de la unidad.
Tomando en cuenta los vectores modales i normalizados el coeficiente de participación
jijj mp ,. ( 2.55 )
La fuerza de inercia de la masa vibrando en el modo n j es el producto de la masa por la
aceleración correspondiente, es decir jnm . , donde
jnjjn tpt ,).(.)( ( 2.56 )
42
El corte basal es igual a:
)(.2 tpV jjj ( 2.57 )
Teniendo en cuenta que la función j tiene unidades de aceleración por lo que se deduce
que tiene unidades de masa; por ello se llama masa efectiva del modo 2jp j . La suma de las
masas efectivas es igual a la suma de las masas del sistema; entonces el cuadrado del coeficiente
de participación del modo ortonormal j representa la parte de la masa total que genera cortante en
la base de dicho modo.
2.3 ANALISIS DINAMICO DE PORTICOS PLANOS TOMANDO EN CUENTA LA INTERACCIÓN SUELO–ESTRUCTURA
El análisis dinámico de pórticos se realiza normalmente, suponiendo que el movimiento que
se aplica en su base, es independientes de las características de la cimentación. Sin embargo,
existen casos en que el movimiento en cualquier punto de la frontera suelo-estructura es
sensiblemente diferente del que habría ocurrido en dicho punto si la estructura no estuviese
presente; en estos casos se dice que existe Interacción Suelo-Estructura.
Conviene estudiar el problema considerando primero lo que se conoce como Interacción
cinemática, producida fundamentalmente, por la geometría y rigidez de la cimentación y en un
segundo paso, considerando las fuerzas inerciales que se generan por la vibración de las masas de
43
la cimentación y de la estructura, que da lugar no solo a elementos mecánicos dentro de los distintos
miembros que la componen, sino también a tres fuerzas y tres momentos referidos a dos ejes
horizontales y uno vertical en la base. Si el suelo no es muy rígido, las fuerzas y los momentos antes
mencionados, producen deformaciones que modifican el movimiento de la cimentación y por ello se
habla de que existe una interacción inercial. Una manera de considerar este tipo de interacción es de
modificar las características dinámicas de la estructura, que es el enfoque que se presenta a
continuación.
2.3.1 ECUACIONES DE MOVIMIENTO DE PORTICOS PLANOS CON INTERACCION SUEL-ESTRUCTURA
En pórticos planos, generalmente se considera la interacción suelo-estructura con tres
grados de libertad en la base de la estructura, cuando la cimentación se considera infinitamente
rígida a cualquier deformación. Para objeto de esta investigación se considera solo dos grados de
libertad, traslación horizontal de la base y rotación en el plano de movimiento, con respecto al eje
centroidal de la superficie de fundación
0u
.
44
y2
k1
k2
C2 y1
m1,J1
C1 kx
k
C0C
m0,J0
m0,J0
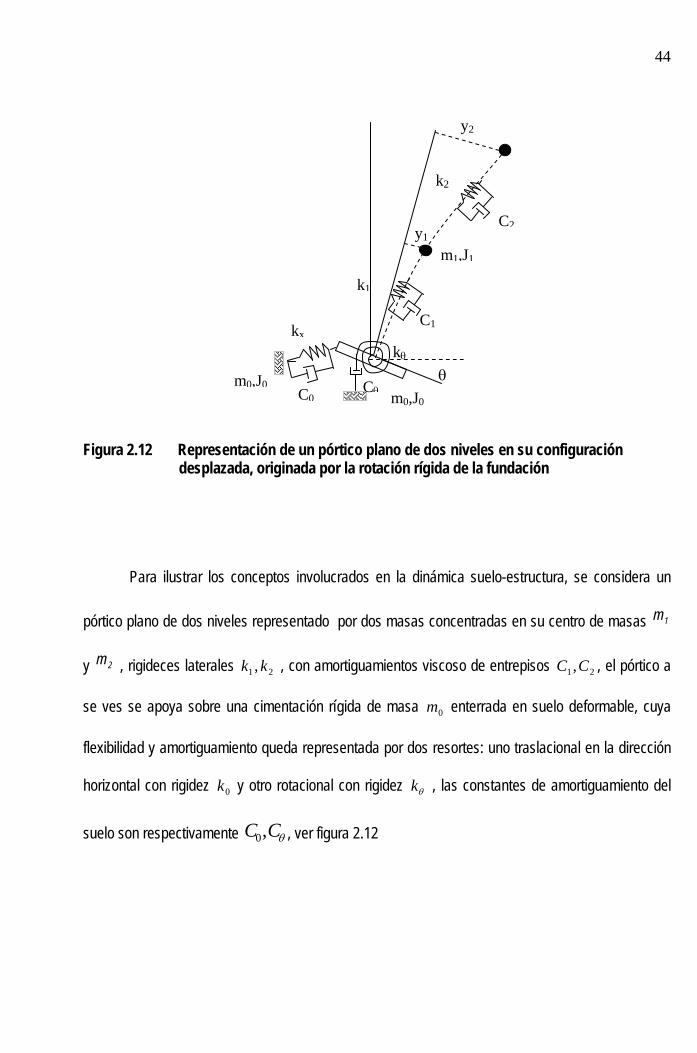
Figura 2.12 Representación de un pórtico plano de dos niveles en su configuración desplazada, originada por la rotación rígida de la fundación
Para ilustrar los conceptos involucrados en la dinámica suelo-estructura, se considera un
pórtico plano de dos niveles representado por dos masas concentradas en su centro de masas
y , rigideces laterales , con amortiguamientos viscoso de entrepisos , el pórtico a
se ves se apoya sobre una cimentación rígida de masa enterrada en suelo deformable, cuya
flexibilidad y amortiguamiento queda representada por dos resortes: uno traslacional en la dirección
horizontal con rigidez y otro rotacional con rigidez , las constantes de amortiguamiento del
suelo son respectivamente C , ver figura 2.12
1m
2m21 , kk
C,0
21 ,CC
0m
0k k

45
Figura 2.13 Fuerzas de equilibrio
Considerando dos grados de libertad y estableciendo equilibrio interno de las masas en la
Figura 2.13; se obtiene el siguiente sistema de ecuaciones:
0222021101210 KChhmhhmJJJ i
( 2.59)
02221110
2
1
2
1
22
0
KChmhmhmhmJ iiiii
(2.60)
01100110000 CCKKm (2.61)
02222121121110111 KCCCKKmmhm (2.62)
0122122220222 CKmmhm (2.63)
De las ecuaciones 2.62 y 2.63 obtenemos la siguiente ecuación
220211011111 hmhmKC ( 2.64)

46
Las ecuaciones anteriores se pueden escribir en forma matricial como:
2
0
2
1
22
11122
2
1
2
012
1111
2222
0
0
iiiii
iii
hmjhmhmhm
hmmmm
hmmm
hmmm
0
1
2
C
C
CCC
CC
000
000
00
00
0
212
22
0
1
2
k
k
kkk
kk
000
000
00
00
0
212
22
0
1
2
0
0
0
0
que representan las ecuaciones de equilibrio dinámico del sistema de la figura 2.12, cuando vibra
libremente, sin ningún excitador.
Para resolver la ecuación del movimiento para sistemas de n–grados de libertad, se utilizara
el análisis dinámico modal con interacción suelo-estructura aplicado a pórticos planos

47
2.3.2 ANALISIS MODAL EN PORTICO PLANO CONSIDERANDO ITERACCION SUELO-ESTRUCTURA PROVOCADA POR EXCITACIÓN SISMICA.
Anteriormente se utilizó el análisis dinámico modal aplicado a pórticos planos sin considerar
la interacción suelo-estructura, ahora se tomará en cuenta introduciendo en el modelo idealizado del
pórtico, un resorte lineal en la base, en dirección horizontal y un resorte angular, alrededor de los
ejes ortogonales. La componente de la aceleración originada por el sismo solo será considerada en
dirección horizontal.
Si se considera la misma estructura de dos niveles representada en la figura 2.12 y
considerando movimiento horizontal provocado por una excitación sísmica )(tg , las ecuaciones de
movimiento en la que se considera amortiguamiento, se puede escribir como:
0 KCM s ( 2.65)
en le sistema de coordenadas mostrado en la figura 2.12, referido a la estructura deformada, la
aceleración horizontal aplicada en la fundación solo desplaza el sistema, por lo tanto :
gs (2.66)
Operando algebraicamente la ecuación diferencial matricial 2.65 y sustituyendo la ecuación 2.66,
tenemos,
gMKCM (2.67)

48
donde g está dado por
0
1
0
0
gg para el caso del pórtico de dos niveles, cuando solo se considera el movimiento de la
base en dirección horizontal, producida por una excitación sísmica..
0
1
0
0
gMKCM ( 2.68 )
Al aplicar el principio de superposición modal, para la resolución de este sistema de ecuaciones se
tiene:
y. y . y . ( 2.69)
donde representa la matriz modal del sistema, mostrado en la figura 2.12
al sustituir las ecuaciones 2.69 en 2.68, resulta
)(
0
1
0
0
tMyKyCyM g
( 2.70)

49
Así, al premultiplicar por iT (que representa al i-ésimo modo del sistema) se obtiene la ecuación
para un grado de libertad:
)(
0
1
0
0
tMYKYCYM giT
iiT
iiT
iiT
( 2.71)
Si se definen:
iiTi Mm * iiT
i CC * iiTi Kk *
*
*
2i
ii m
C
*
*2
i
ii m
k y
*
0
1
0
0
i
iT
i m
M
En donde , , representan la masa, el amortiguamiento y la rigidez generalizada del
sistema correspondiente, respectivamente.
*im *
ic *ik
i es el coeficiente de amortiguamiento viscoso
equivalente al sistema, i representa la frecuencia circular de vibración del sistema
50
correspondiente al modo de vibración y i i es el coeficiente de participación traslacional del
modo de vibración i , por lo tanto la ecuación 2.71 se puede escribir como:
( 2.72) )(2 2Yii tY giiii Yi
2.3.3 RIGIDECES EQUIVALENTES DE LAS CIMENTACIONES
Las rigideces de las cimentaciones dependen de la geometría del área de contacto con el
suelo, de las propiedades dinámicas del suelo de la cimentación y de las características de su
movimiento ( Ondas de incidencia ). En un sistema suelo-estructura con cimentación rígida, en
realidad tiene seis grados de libertad, de los cuales, para pórticos planos se consideran el
desplazamiento vertical, el desplazamiento horizontal y la rotación en el plano. En consecuencia se
requieren los coeficientes de rigidez siguientes:
xK0 rigidez equivalente en la dirección horizontal
yK0 rigidez equivalente en la dirección vertical
K rigidez equivalente rotacional con respecto a los ejes centroidales de la base
perpendiculares a la dirección que se analiza.
Varios investigadores han determinado valores de las rigideces equivalentes para diversas
formas de cimentaciones rígidas sujetas a excitaciones armónicas. Se ha encontrado que las
rigideces ante cargas dinámicas, dependen de la frecuencia del movimiento y son cantidades

51
complejas cuya parte imaginarias reflejan el amortiguamiento. Sin embargo, los resultados
correspondientes a cargas estáticas brindan precisión suficiente para la mayoría de los casos de
interés en el análisis sísmico de edificios. A continuación se presentan fórmulas propuestas por los
autores Pais y Kausel (1985, 1988) para cimentaciones sobre un semiespacio elástico.
Para cimentaciones circulares enterradas,
)1(1
80
GRK x y )58.03.21(
)1(3
8 33
GRK ( 2.73 )
donde en ( ) y G 2/ mton son los módulos de cortante y de Poisson del suelo
respectivamente, R es el radio de la cimentación en ( ) y m , es el cociente de la profundidad
enterrada de la fundación, entre R
Para fundaciones rectangulares enterradas, se han desarrollado fórmulas algo más
complejas que las indicadas anteriormente. Sin embargo, en la mayoría de los casos se utilizan las
expresiones para fundaciones circulares usando los siguientes radios equivalentes:
2/1)/( AReq Para rigideces transnacionales
4/1)/4( IReq Para rigideces rotacionales ( 2.74 )

52
A es el área de la cimentación ( ), 2m I su correspondiente momento de inercia alrededor
del eje horizontal de cabeceo ( o ) en ( m ) xI yI 4
Para objeto de esta investigación se utilizan las fórmulas propuesta por el Distrito federal de
México descritas en la tabla 2.1 aplicadas a suelos blandos el cual se asemejan a los suelos
ubicados para las formas espectrales S2, S3 y S4
En la zona II equivalentes a la Zona Espectral S2 y S3
Profundidad de desplante
Rigidez lateral Kx
Rigidez rotacional Kr
≤ 1 m
11GRx
7GRr3
≥ 3 m
15GRx
11GRr3
En la zona III equivalentes a la Zona Espectral S4
Profundidad de desplante
Rigidez lateral Kx
Rigidez rotacional Kr
≤ 1 m
7GRx
6GRr3
≥ 3 m
8GRx
9GRr3
Tabla 2.1 Rigideces lateral y rotacional para fundaciones rígidas
53
C
2.3.4 AMORTIGUAMIENTO EN CIMENTACIONES
El amortiguamiento del suelo envuelve pérdidas de energía por fricción, es una medida de la
disipación de energía de un sistema. Este amortiguamiento llamado histérico lineal, es independiente
de la frecuencia y cuando trabaja en el dominio de dicha frecuencia se introduce en la solución,
reemplazo las constantes elásticas por las complejas. Para el amortiguamiento viscoso que se aplica
en la matriz , representando la radiación de energía del suelo, la variable compleja será también
función de las constantes elásticas sólo que mas compleja.
Los investigadores han señalado que los factores que tienen más influencia en la relación de
amortiguadores, serían:
Amplitud de las deformaciones cíclicas
Presión confinante
Angularidad y granulometría
Número de ciclos de esfuerzo.
También mencionan que la relación de vacíos y la densidad del suelo tienen poca influencia.
Debe señalarse que falta mucha investigación en este campo, dada la complejidad del
comportamiento de varios tipos de suelo, como las arcillas.
Para efectos de esta investigación, se tomará una relación de amortiguamiento
constante, suelo-estructura.

CAPÍTULO III
CONDICIONES DE LA INVESTIGACION Y APLICACIONES
Dado que el objetivo principal de esta investigación es de detectar la influencia de la rigidez
y el amortiguamiento de la interfase suelo-cimentación en la respuesta de estructuras sometidas a
excitaciones sísmicas y que la realización del análisis dinámico puede llevarse a efecto mediante
diferentes métodos, con fundamentos teóricos establecidos y procedimientos a seguir distintos, el
método que se utilizó para determinar la respuesta sísmica en esta investigación, es el método de
análisis dinámico modal, con interacción suelo-estructura, utilizando acelerogramas representativos
de sismos reales, obtenidos de las formas espectrales, S1, S2, S3 y S4 donde se seleccionaron tres
acelerogramas por cada forma espectral, verificando que el espectro elástico promedio del conjunto
de los acelerogramas, deberá aproximarse conservadoramente al espectro de de diseño
recomendado por las Norma Venezolana COVENIN 1756-2001 para edificaciones sismorresistentes.
Adicionalmente se consideró para el análisis con interacción suelo-estructura el comportamiento
lineal de los materiales que los constituyen.
Para el análisis dinámico modal aplicado a pórticos planos, tomando en cuenta interacción
suelo estructura y comportamiento lineal de los materiales, se desarrolló un programa de
computación que toma en cuenta estos efectos, dado que los programas de análisis estructural,
comerciales conocidos, como el Cal-91, IP3-SIS, Sap-2000, StaadPro, Cadre, no lo consideran
directamente y además los métodos que utilizan para el análisis de estructuras sometidas a
excitaciones en el tiempo a través de acelerogramas, resuelven el análisis dinámico por el método
55
paso a paso y no utilizando un análisis modal con acelerogramas como el que se requiere en esta
investigación.
El análisis dinámico se aplica a edificios ortogonales de 4, 8, 12, y 20 pisos, mediante un
análisis dinámico modal, plano con Interacción Suelo–Estructura (ISE). La Base de fundación, se
considera infinitamente rígida (Empotrada) y el cual esta influenciada básicamente, por la
variabilidad del módulo cortante del suelo (G); cuyos datos requeridos, para esta investigación al
considerar la interacción suelo estructura bajo el punto de vista dinámico, se han tomado de suelos
regulares considerando Zona Sísmica III según las Norma Venezolana COVENIN 1756-2001,
teniendo en cuenta que el coeficiente de Aceleración horizontal recomendado es 20.00 A
utilizado para la simulación de los acelerogramas y cuyos valores del módulo de cortante, cumplen
para cada forma espectral, con los parámetros dinámicos, como son la velocidad promedio de las
ondas de corte y profundidad del estrato que estén comprendidos dentro de la tabla 5.1 de la misma
Norma. Para el cálculo de las rigideces equivalentes se utilizó la formulación indicada en el punto
2.3.3 del Capítulo II, de este trabajo.
3.1 PROGRAMA DE ANALISIS DINAMICO MODAL DE PORTICOS PLANOS CON INTERACCION SUELO-ESTRUCTURA
EL programa de análisis dinámico modal de pórticos planos con interacción suelo-estructura,
REDISE, da la respuesta de un pórtico sometido a excitaciones sísmicas en su base. El uso de este
programa requiere como primer paso, la determinación previa de la matriz de rigidez lateral y de
masa del sistema para poder resolver el análisis dinámico modal que determinan las frecuencias
naturales y los modos normales de vibración, además el programa REDISE solicita un conjunto de
56
datos que define la excitación sísmica (Acelerograma) a que será sometida la estructura, para
calcular la respuesta dinámica en términos de desplazamientos, velocidad y aceleración. Para ello,
se hizo uso del método de integración directa suponiendo una función de la excitación, aproximada
por segmentos lineales dentro de los intervalos de tiempo. En este paso, en la fase estática, el
programa REDISE determina los desplazamientos en los nodos de la estructura en coordenadas
globales, las fuerzas en extremo de miembro en coordenadas locales y las reacciones, cuando la
estructura está solicitada a cargas estáticas. En la fase dinámica, calcula la matriz de rigidez lateral,
las frecuencias de vibración y los modos de vibración normalizados debidamente escalados por el
coeficiente de participación modal y su masa efectiva participativa. En el segundo paso, el programa
REDISE modifica la matriz de rigidez y de masa para considerar los efectos de la interacción suelo-
estructura a través de la incorporación de las propiedades geométricas de la cimentación y de las
propiedades dinámicas del suelo: rigideces horizontales y rotacionales. Como se introducen dos
grados de libertad adicionales, al considerar la interacción suelo estructura, se determinan las
nuevas frecuencias y modos normalizados de vibración del nuevo sistema, con su respectivo
coeficiente de participación modal y su masa efectiva participativa. Aquí el programa REDISE solicita
de nuevo, el archivo que contiene el conjunto de datos que define la excitación sísmica
(Acelerograma) a que será sometida la estructura y así calcular la respuesta dinámica pero ahora,
considerando los efectos de la interacción suelo-estructura.
El programa REDISE tiene la propiedad de graficar la respuesta de la estructura sometida a la
excitación sísmica en el tiempo, para los distintos modos de vibración.
EL programa REDISE por métodos matriciales de transformación directa, calcula la matriz de
rigidez lateral, partiendo de una condensación estática de la matriz de rigidez global de la estructura,

57
la cual se forma por el ensamblaje de las matrices de rigidez de cada elemento en coordenadas
globales, tomando en cuenta su conectividad. La condensación estática se realiza seleccionando los
grados de libertad que interesan, en un grupo, y en el otro, el resto de los grados de libertad. Esto se
logra primero, intercambiando las filas correspondientes al primer grado de libertad lateral con el
correspondiente a la última fila e intercambiando además, las columnas correspondientes a dichos
grados. Este procedimiento se continúa hasta agrupar todos los grados de libertad laterales.
Realizado este procedimiento, la matriz de rigidez conserva su naturaleza simétrica, el cual se
aprovecha para realizar una partición matricial de la matriz de rigidez de la estructura, en cuatro
submatrices. La primera contiene los coeficientes de rigidez correspondientes a los grados de
libertad rotacionales y de desplazamiento vertical, la segunda, contiene las incidencias los grados de
libertad totales, la tercera por su simetría es la matriz transpuesta de la segunda y la cuarta contiene
los grados de libertad laterales. El programa REDISE, luego de la formación de estas submatrices,
resuelve el sistema de ecuaciones matriciales derivada de las submatrices, mediante la inversión
matricial de la primera submatriz, el cual se realiza utilizando el método de inversión de matrices de
Gauss Jordán y mediante operaciones de transposición, suma y multiplicación de matrices.
3.2 GENERACION DE ACELEROGRAMAS SIMULADOS
Para la generación de los acelerogramas, se partió de las formas espectrales S1, S2, S3 y
S4 recomendadas por la Norma Venezolana COVENIN 1756-2001, que definen en función de la
profundidad de los estratos, tipos de suelo y la velocidad promedio de la onda de corte, espectros
elásticos de aceleración para cada forma. Estos espectros están representados en una gráfica por
dos rectas y una curva, que relaciona la aceleración del terreno en función de la gravedad, con
diferentes períodos de duración. La primera recta es ascendente el cual parte de una aceleración

58
característica del suelo, en función de la amenaza sísmica, multiplicada por unos coeficientes que
definen el riesgo sísmico. La segunda recta es constante partiendo de la aceleración máxima
alcanzada en un determinado período, hasta un período característico de la forma espectral y la
última es una curva descendiente que tiende amortiguarse. La amenaza sísmica está clasificada por
la Norma Venezolana COVENIN 1756-2001 en siete zonas, el cual se seleccionó para esta
investigación, una zona de amenaza sísmica intermedia como es la zona III que se aplica, por
ejemplo, a la mayor parte de los distritos pertenecientes al Estado Zulia. Para esta zona la
aceleración horizontal recomendada es 20.00 A Con los valores de la aceleración y períodos que
definen cada espectro, se determinaron los espectros de velocidad para cada forma cuyos datos se
suministraron a un programa de computación SIMQKE que genera varios acelerogramas
compatibles con los espectros de diseño suministrados y que a su vez genera una respuesta
espectral, en términos de velocidad, que determina un espectro de aceleración, por cada
acelerograma, cuyo espectro de respuesta promedio está comprendido dentro del espectro de
diseño suministrado. Esta respuesta se muestra en el grafico de comparación de los espectros
suministrados en el Apéndice. Para esta investigación se generaron cuatro espectros de diseño
elástico, uno para cada forma espectral el cual se muestra en el Apéndice como Espectro de diseño,
zona tres y tres acelerogramas para cada zona espectral cuyas gráficas se identifican en el
Apéndice como S1-1, S1-2 y S1-3, para la forma espectral S1, S2-1, S2-2 y S2-3, para la forma
espectral S2, S3-1, S3-2 y S3-3, para la forma espectral S3 y S4-1,S4-2 y S4-3, para la forma
espectral S4.
59
3.3. CRITERIOS PARA LA SELECCIÓN DEL MODULO CORTANTE DEL SUELO
En Venezuela se consideran cuatro condiciones típicas del suelo:
1. Suelos Tipo S1. Roca de cualquier característica natural definido principalmente,
por presentar velocidades promedios de ondas de corte de más de 500 m/seg
2. Suelos Tipo S2. Suelo Rígido, definido así cualquier suelo con profundidades
menores de 50 m al nivel de roca, formado por depósitos estables de arena, gravas
o arcillas rígidas con una velocidades promedios de ondas de corte comprendida
entre 250 m/seg y 400 m/seg.
3. Suelos Tipo S3. Suelos no cohesivos profundos o arcillas rígidas incluyendo sitios
donde la profundidad del suelo sobre el basamento mayor de 50 m y está
compuesto por depósitos de arena, gravas o arcillas rígidas, con velocidades
promedios de ondas de corte comprendida entre 170 m/seg y 280 m/seg.
4. Suelos Tipo S4. Arcillas blandas a semiduras o arenas caracterizadas
principalmente por presentar capas de Arcillas blandas a semiduras intercaladas por
capas de arena u otro material no cohesivo con velocidades promedios de ondas de
corte menores de 170 m/seg

60
Las formas espectrales características de estos tipos de suelo están definidas en la Norma
Venezolana COVENIN 1756-2001
Espectros de diseño Zona Sísmica 3
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.000 1.000 2.000 3.000 4.000 5.000 6.000 7.000
Período T (seg)
Ace
lera
ció
n
(Ad
/g)
Espectro S1
Espectro S2
Espectro S3
Espectro S4
Figura 3.1 Formas espectrales normalizadas según las Normas COVENIN 1756-2001
El criterio de selección de la variación de el módulo de rigidez del suelo, como parámetro
principal para medir la influencia de la rigidez del suelo, en la respuesta sísmica de edificios,
considerando interacción suelo-estructura, está de acuerdo con los valores descritos en la tabla 3.1
copiada aquí de la Norma Venezolana COVENIN 1756-2001

61
TABLA 3.1 FORMA ESPECTRAL Y FACTOR DE CORRECCION
Zonas Sísmica 1 a 4 Zonas Sísmica 5 a 7 Material Vsp (m/seg)
H (m) Forma
Espectral Forma
Espectral
Roca sana / fracturada >500 S1 0.85 S1 1.00
<30 S1 0.85 S1 1.00
30-50 S2 0.80 S2 0.90
Roca blanda o meteorizada y suelos muy duros o muy densos
>400
>50 S3 0.70 S2 0.90
<15 S1 0.80 S1 1.00
15-50 S2 0.80 S2 0.90
Suelos duros o densos
250-400 >50 S3 0.75 S2 0.90
<50 S3 0.70 S2 0.95 Suelos firmes / medio densos
170-250 >50 S3a 0.70 S3 0.75
<15 S3 0.70 S2 0.90 Suelos blandos / sueltos <170 >15 S3a 0.70 S3 0.80
Suelos blandos / sueltos, intercalados con suelos más rígidos
<170
H1
S2c
0.65
S2
0.70
a) Si Ao < 0.15 úsese S4 b) El espesor de los estratos blandos o sueltos (Vsp<170 m/s) debe ser mayor al 0.1H c) Si H1 es mayor a 0.25H y Ao < 0.20 use S3
De los estudios de la dinámica de suelos existe una relación entre la profundidad del estrato, la
velocidad de la onda de corte, el período característico del suelo, con el módulo de corte, cuya
formulación es la siguiente:
s
HT
4
Gs
gvol
( 3.1 )
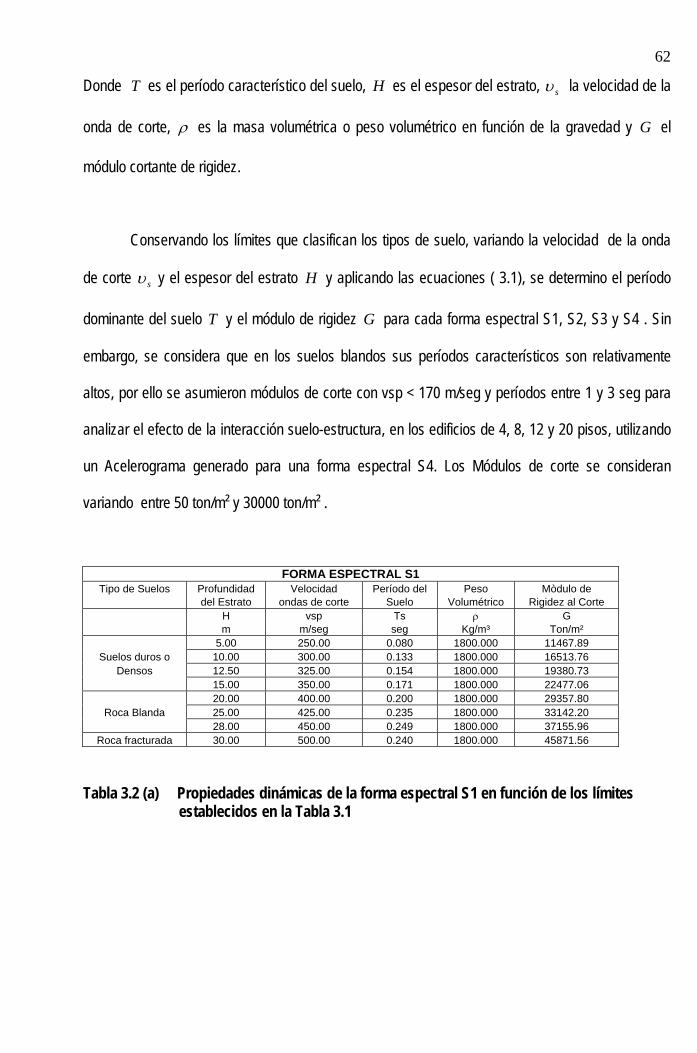
62
Donde T es el período característico del suelo, H es el espesor del estrato, s la velocidad de la
onda de corte, es la masa volumétrica o peso volumétrico en función de la gravedad y el
módulo cortante de rigidez.
G
Conservando los límites que clasifican los tipos de suelo, variando la velocidad de la onda
de corte s y el espesor del estrato H y aplicando las ecuaciones ( 3.1), se determino el período
dominante del suelo T y el módulo de rigidez para cada forma espectral S1, S2, S3 y S4 . Sin
embargo, se considera que en los suelos blandos sus períodos característicos son relativamente
altos, por ello se asumieron módulos de corte con vsp < 170 m/seg y períodos entre 1 y 3 seg para
analizar el efecto de la interacción suelo-estructura, en los edificios de 4, 8, 12 y 20 pisos, utilizando
un Acelerograma generado para una forma espectral S4. Los Módulos de corte se consideran
variando entre 50 ton/m² y 30000 ton/m² .
G
FORMA ESPECTRAL S1 Tipo de Suelos Profundidad Velocidad Período del Peso Mòdulo de
del Estrato ondas de corte Suelo Volumétrico Rigidez al Corte H vsp Ts G m m/seg seg Kg/m³ Ton/m² 5.00 250.00 0.080 1800.000 11467.89
Suelos duros o 10.00 300.00 0.133 1800.000 16513.76 Densos 12.50 325.00 0.154 1800.000 19380.73
15.00 350.00 0.171 1800.000 22477.06 20.00 400.00 0.200 1800.000 29357.80
Roca Blanda 25.00 425.00 0.235 1800.000 33142.20 28.00 450.00 0.249 1800.000 37155.96
Roca fracturada 30.00 500.00 0.240 1800.000 45871.56
Tabla 3.2 (a) Propiedades dinámicas de la forma espectral S1 en función de los límites
establecidos en la Tabla 3.1

63
FORMA ESPECTRAL S2 Tipo de Suelos Profundidad Velocidad Período del Peso Mòdulo de
del Estrato ondas de corte Suelo Volumétrico Rigidez al Corte H vsp Ts G m m/seg seg Kg/m³ Ton/m² 15.00 250.00 0.240 1800.000 11467.89 17.50 300.00 0.233 1800.000 16513.76
Suelos Densos 20.00 325.00 0.246 1800.000 19380.73 22.50 340.00 0.265 1800.000 21211.01 25.00 350.00 0.286 1800.000 22477.06 30.00 360.00 0.333 1800.000 23779.82 35.00 370.00 0.378 1800.000 25119.27
Roca Blanda 40.00 380.00 0.421 1800.000 26495.41 45.00 390.00 0.462 1800.000 27908.26 50.00 400.00 0.500 1800.000 29357.80
Tabla 3.2 (b) Propiedades dinámicas de la forma espectral S2 en función de los límites
establecidos en la Tabla 3.1
FORMA ESPECTRAL S3 Tipo de Suelos Profundidad Velocidad Período del Peso Mòdulo de
del Estrato ondas de corte Suelo Volumétrico Rigidez al Corte H vsp Ts G m m/seg seg Kg/m³ Ton/m² 5.00 50 0.40 1800.000 50 10.00 80 0.50 1800.000 100 15.00 80 0.75 1800.000 150 20.00 80 1.00 1800.000 200
Suelos Blandos 25.00 100 1.00 1800.000 250 30.00 120 1.00 1800.000 300 35.00 140 1.00 1800.000 350
40.00 150 1.07 1800.000 400 45.00 170 1.06 1800.000 450 50.00 250 0.80 1800.000 500 55.00 250 0.88 1800.000 600 60.00 260 0.92 1800.000 700
65.00 270 0.96 1800.000 800 70.00 280 1.00 1800.000 1000
Suelos firmes 75.00 290 1.03 1800.000 2000 medio densos 80.00 300 1.07 1800.000 3000
85.00 310 1.10 1800.000 4000 90.00 320 1.13 1800.000 5000 95.00 330 1.15 1800.000 10000 100.00 340 1.18 1800.000 20000 105.00 350 1.20 1800.000 30000
Tabla 3.2 (c) Propiedades dinámicas de la forma espectral S3 en función de los límites
establecidos en la Tabla 3.1
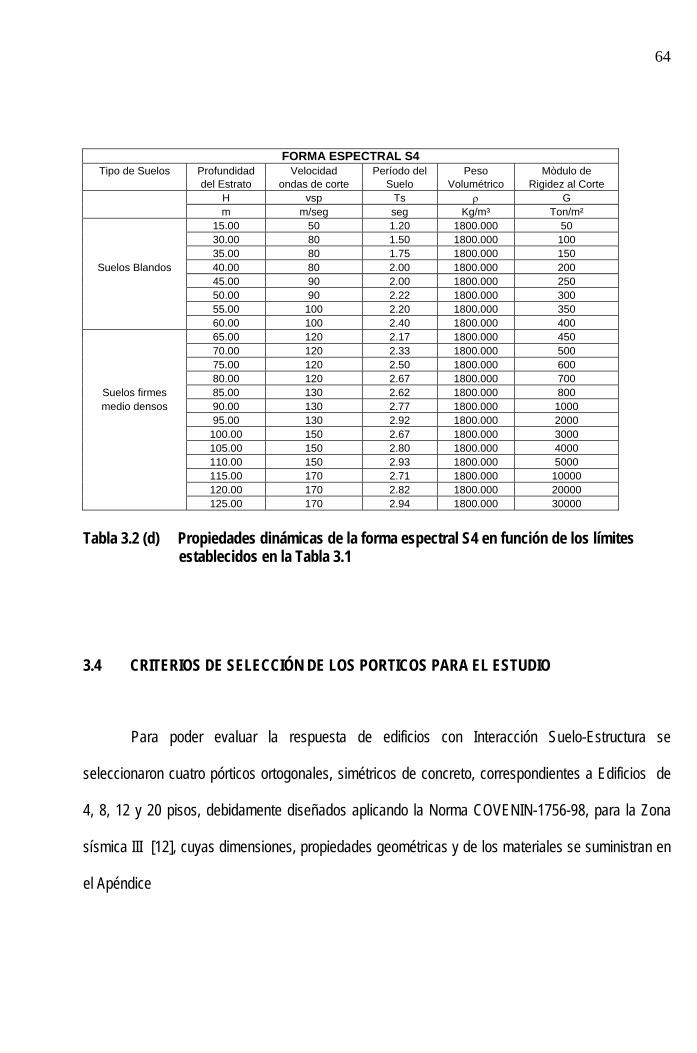
64
FORMA ESPECTRAL S4 Tipo de Suelos Profundidad Velocidad Período del Peso Mòdulo de
del Estrato ondas de corte Suelo Volumétrico Rigidez al Corte H vsp Ts G m m/seg seg Kg/m³ Ton/m² 15.00 50 1.20 1800.000 50 30.00 80 1.50 1800.000 100 35.00 80 1.75 1800.000 150
Suelos Blandos 40.00 80 2.00 1800.000 200 45.00 90 2.00 1800.000 250 50.00 90 2.22 1800.000 300 55.00 100 2.20 1800.000 350 60.00 100 2.40 1800.000 400 65.00 120 2.17 1800.000 450 70.00 120 2.33 1800.000 500 75.00 120 2.50 1800.000 600 80.00 120 2.67 1800.000 700
Suelos firmes 85.00 130 2.62 1800.000 800 medio densos 90.00 130 2.77 1800.000 1000
95.00 130 2.92 1800.000 2000 100.00 150 2.67 1800.000 3000 105.00 150 2.80 1800.000 4000 110.00 150 2.93 1800.000 5000 115.00 170 2.71 1800.000 10000 120.00 170 2.82 1800.000 20000 125.00 170 2.94 1800.000 30000
Tabla 3.2 (d) Propiedades dinámicas de la forma espectral S4 en función de los límites
establecidos en la Tabla 3.1
3.4 CRITERIOS DE SELECCIÓN DE LOS PORTICOS PARA EL ESTUDIO
Para poder evaluar la respuesta de edificios con Interacción Suelo-Estructura se
seleccionaron cuatro pórticos ortogonales, simétricos de concreto, correspondientes a Edificios de
4, 8, 12 y 20 pisos, debidamente diseñados aplicando la Norma COVENIN-1756-98, para la Zona
sísmica III [12], cuyas dimensiones, propiedades geométricas y de los materiales se suministran en
el Apéndice
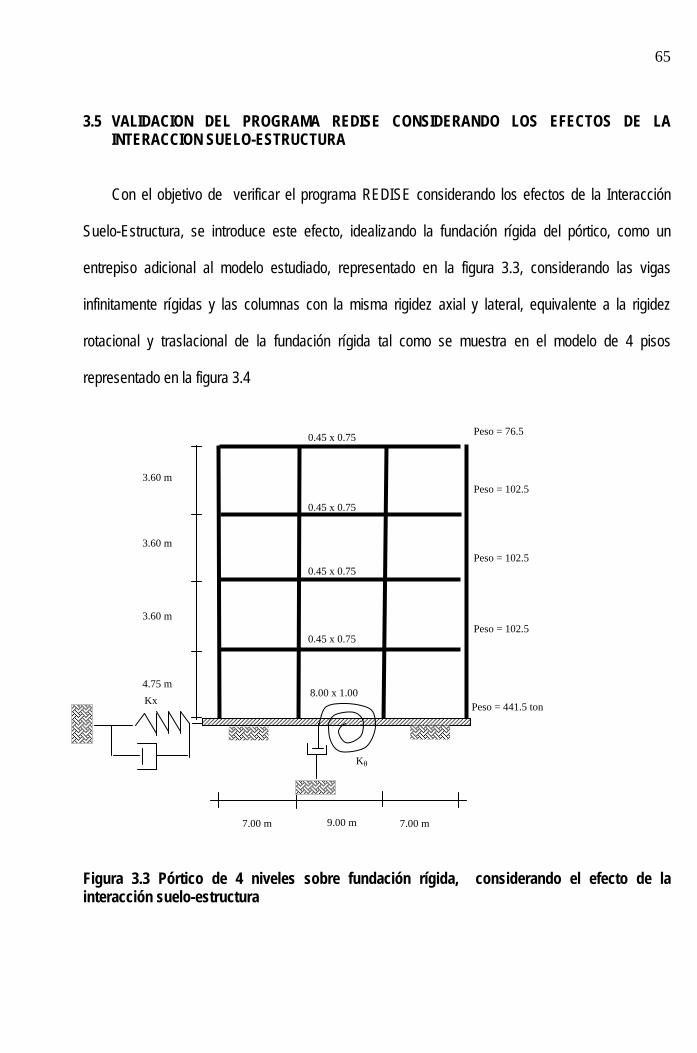
65
3.5 VALIDACION DEL PROGRAMA REDISE CONSIDERANDO LOS EFECTOS DE LA INTERACCION SUELO-ESTRUCTURA
Con el objetivo de verificar el programa REDISE considerando los efectos de la Interacción
Suelo-Estructura, se introduce este efecto, idealizando la fundación rígida del pórtico, como un
entrepiso adicional al modelo estudiado, representado en la figura 3.3, considerando las vigas
infinitamente rígidas y las columnas con la misma rigidez axial y lateral, equivalente a la rigidez
rotacional y traslacional de la fundación rígida tal como se muestra en el modelo de 4 pisos
representado en la figura 3.4
Peso = 76.5
0.45 x 0.75
3.60 m Peso = 102.5
0.45 x 0.75
3.60 m
Peso = 102.5 0.45 x 0.75
3.60 m
Peso = 102.5 0.45 x 0.75
4.75 m
7.00 m 7.00 m 9.00 m
Peso = 441.5 ton 8.00 x 1.00
Kx
Kθ Figura 3.3 Pórtico de 4 niveles sobre fundación rígida, considerando el efecto de la interacción suelo-estructura

66
0.45 x 0.75 Peso = 76.5 ton
3.60 m
Peso = 102.5 ton 0.45 x 0.75
3.60 m
Peso = 102.5 ton 0.45 x 0.75
3.60 m
Peso = 102.5 ton 0.45 x 0.75
4.75 m Peso = 441.5 ton
Inf, Rígida
1.00 m
7.00 m 9.00 m 7.00 m
Figura 3.4 Pórtico de 4 niveles sobre fundación rígida, simulada por un entrepiso adicional de un metro de altura, para considerar el efecto de la interacción suelo-estructura
L=1 m
Figura 3.5 Nivel adicional para considerar los efectos de la Interacción Suelo-Estructura

67
θ
F1 F3 F2 F4
L2 L3
L1 L4
Figura 3.6 Relación entre la rigidez rotacional y la rigidez lateral de la fundación para considerar los efectos de la Interacción Suelo-Estructura
A partir de la idealización de la base de fundación del Pórtico mostrada en la figura 3.6 y
estableciendo el equilibrio mediante la aplicación de momento de las reacciones de las columnas de
este sistema con respecto al centro de gravedad tenemos:
KLFLFLFLF 44332211 ... ( 3.2 )
como las rigidez axial de las columnas son iguales y y por definición de rigidez para
una rotación de
iAi KF .
1 , sustituyendo estas relaciones en la ecuación 3.2 resulta: ii L
KLKLKLKLK AAAA 24
23
22
21 .... ( 3.3 )
Donde L
AEK A , sustituyendo este valor en la ecuación 3.3 y reordenando se obtiene:

68
N
iiLE
KLA
1
2
. ( 3.4 )
La ecuación 3.4 relaciona la rigidez rotacional de la fundación con el área de la sección transversal
de la columna.
Como la viga es infinitamente rígida en su plano, las columnas son iguales y de igual altura tenemos
que la rigidez lateral del piso adicional es:
3
...12
L
IENK c
L donde
EN
LKI L
c ..12
. 3
( 3.5 )
La ecuación 3.5 relaciona la inercia de la sección transversal de la columna con la rigidez lateral de
la fundación
En las ecuaciones 3.4 y 3.5 N representa el número de columnas que posee el entrepiso
adicional, L, la altura de la columna o del entrepiso, E el módulo de Elasticidad del concreto de las
columnas, el área y la Inercia de la sección transversal de la columna y son la rigidez
lateral y rotacional de la fundación, obtenidas a partir de las ecuaciones 2.74 y tabla 2.1
cIA, KK L ,

69
PROPIEDADES DE LA INTERACCION SUELO-ESTRUCTURA
Módulo de Rigideces del suelo Columnas Equivalentes
Corte del suelo Lateral Rotacional Area Inercia
Ton/m² Kg/cm Kg-cm cm² cm4
50.00 26785.64 3.0734E+10 4.030725124 2232.136625
100.00 53571.28 6.1469E+10 8.061450249 4464.27325
200.00 107142.56 1.2294E+11 16.1229005 8928.5465
300.00 160713.84 1.8441E+11 24.18435075 13392.81975
400.00 214285.12 2.4587E+11 32.245801 17857.093
500.00 267856.40 3.0734E+11 40.30725124 22321.36625
750.00 401784.59 4.6101E+11 60.46087687 33482.04938
1000.00 535712.79 6.1469E+11 80.61450249 44642.7325
1250.00 669640.99 7.6836E+11 100.7681281 55803.41563
1500.00 803569.19 9.2203E+11 120.9217537 66964.09875
2000.00 1071425.58 1.2294E+12 161.229005 89285.465
3000.00 1607138.37 1.8441E+12 241.8435075 133928.1975
4000.00 2142851.16 2.4587E+12 322.45801 178570.93
5000.00 2678563.95 3.0734E+12 403.0725124 223213.6625
10000.00 5357127.90 6.1469E+12 806.1450249 446427.325
20000.00 10714255.80 1.2294E+13 1612.29005 892854.65
30000.00 16071383.70 1.8441E+13 2418.435075 1339281.975
Tabla 3.3 Rigidez rotacional y rigidez lateral en función del módulo de corte y su propiedades geométricas equivalentes para considerar los efectos de la interacción Suelo-Estructura
Utilizando el programa REDISE, se analizaron los dos modelos correspondientes a un
Pórtico de 4 niveles con Interacción Suelo-Estructura, mostrando el modelo real, figura 3.3 y el
modelo con la interacción simulada figura 3.4. Para ambos modelos, las secciones de las columnas
de los dos primeros niveles son de 50 x 50 cm y los otros dos niveles restantes, 45 x 45 cm, se
consideró un módulo de corte del suelo de 30000 ton/m², cuyas rigideces laterales y rotacionales, y
las propiedades geométricas del piso adicional, para las columnas del segundo modelo, están
suministradas en la tabla 3.3.

70
Para ambos modelos se consideró una relación de amortiguamiento uniforme 01.0 y
una excitación sísmica en la base correspondiente a un acelerograma simulado según la forma
espectral S4, para una Zona sísmica III. Los resultados se muestran a continuación:
MODELO CON INTERACCION SUELO ESTRUCTURA SIMULADA. FIGURA 3.4
PROGRAMA DE ANALISIS DE PORTICOS PLANOS CON INTERACCION SUELO-ESTRUCTURA Calculado por: Ing. Carlos Rincón M PORTICO DE (4+1) NIVELES CON ISE R.Amortiguamiento = 0.05 Modo : 1 Desplazamiento máximo del terreno = 9.096553 cm %Masa participativa =43.00 %Sumatoria de Masa participativa =43.00 F. circular =8.161 Coef. Participación =19.018 Corte Basal máximo 219,119.123 Nivel Desplaz. Aceleración F.Inercia F. de Corte cm cm/seg.2 Kg Kg 5 11.455 762.944 59106.754 59106.754 4 10.243 682.212 71281.104 130387.858 3 7.7500 516.168 53931.890 184319.748 2 4.9140 327.259 34193.679 218513.426 1 0.0200 1.346 605.6960 219119.123
Respuesta dinámica Desplazamiento último nivel
-15
-10
-5
0
5
10
15
-3 2 7 12 17 22 27 32
Tiempo (seg)
Des
pla
zam
ien
to (
cm)
SIM-REDISE
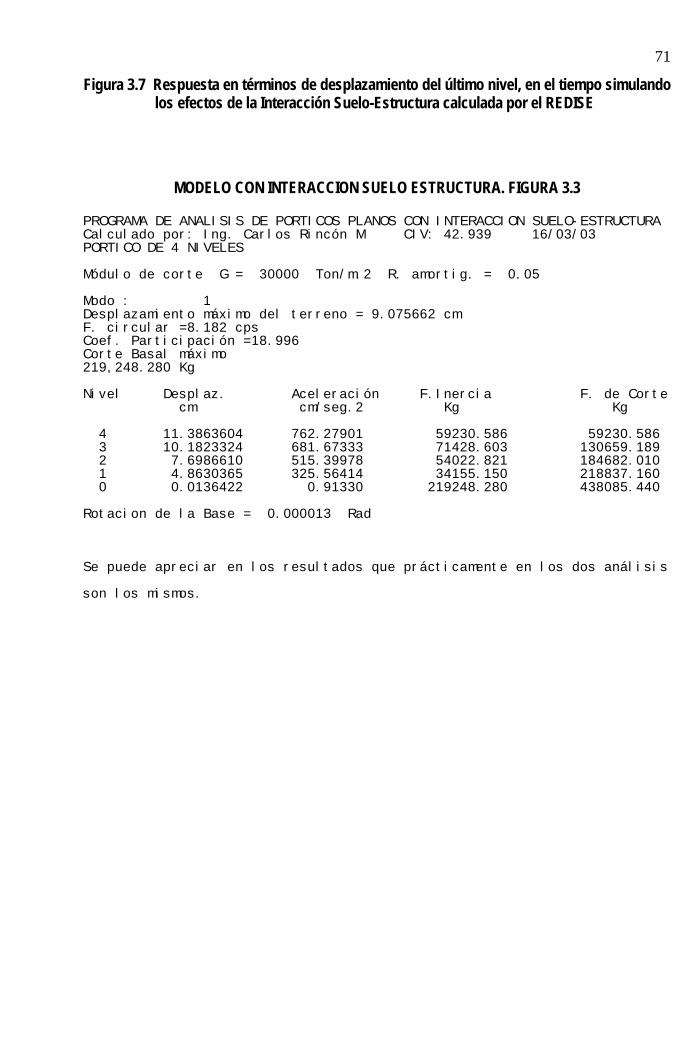
71
Figura 3.7 Respuesta en términos de desplazamiento del último nivel, en el tiempo simulando los efectos de la Interacción Suelo-Estructura calculada por el REDISE
MODELO CON INTERACCION SUELO ESTRUCTURA. FIGURA 3.3
PROGRAMA DE ANALISIS DE PORTICOS PLANOS CON INTERACCION SUELO-ESTRUCTURA Calculado por: Ing. Carlos Rincón M CIV: 42.939 16/03/03 PORTICO DE 4 NIVELES Módulo de corte G = 30000 Ton/m.2 R. amortig. = 0.05 Modo : 1 Desplazamiento máximo del terreno = 9.075662 cm F. circular =8.182 cps Coef. Participación =18.996 Corte Basal máximo 219,248.280 Kg Nivel Desplaz. Aceleración F.Inercia F. de Corte cm cm/seg.2 Kg Kg 4 11.3863604 762.27901 59230.586 59230.586 3 10.1823324 681.67333 71428.603 130659.189 2 7.6986610 515.39978 54022.821 184682.010 1 4.8630365 325.56414 34155.150 218837.160 0 0.0136422 0.91330 219248.280 438085.440 Rotacion de la Base = 0.000013 Rad Se puede apreciar en los resultados que prácticamente en los dos análisis
son los mismos.

72
Respuesta dinámica Desplazamiento último nivel
-15
-10
-5
0
5
10
15
-3 2 7 12 17 22 27 32
Tiempo (seg)
Des
pla
zam
ien
to (
cm)
REDISE
Figura 3.8 Respuesta en términos de desplazamiento del último nivel, en el tiempo incluyendo los efectos de la Interacción Suelo-Estructura calculada por el REDISE
Respuesta dinámica Desplazamiento último nivel
-15
-10
-5
0
5
10
15
-3 2 7 12 17 22 27 32
Tiempo (seg)
Des
pla
zam
ien
to (
cm)
SAP2000
Figura 3.9 Respuesta en términos de desplazamiento del último nivel, en el tiempo simulando los efectos de la Interacción Suelo-Estructura calculada por el SAP2000
CAPÍTULO IV
ANALISIS DE RESULTADOS Y CONCLUSIONES
4.1 RESULTADOS DE LA INVESTIGACION
En esta investigación se utilizo el Programa de computación REDISE, el cual realicé como parte
de los objetivos, para hacer un análisis modal de Pórticos planos, sometidos a una excitación
sísmica, a través de acelerogramas, considerando comportamiento lineal de los materiales y los
efectos directos de la interacción suelo-estructura para una fundación rígida, diseñado con Visual
Basic 6.0. También como parte de los objetivos, con el Programa REDISE se analizaron Pórticos de
concreto, ortogonales de 4, 8, 12 y 20 pisos, previamente diseñados con la Normas Venezolanas
Sismorresistentes [9], considerando deformaciones por fuerza axial en todos los elementos que
constituyen la estructura. Los Pórticos se consideraron empotrados a la base de fundación y
sometidos a una excitación sísmica a través de acelerogramas.
Para incluir los efectos de la Interacción suelo-estructura, se determinó el Módulo de Rigidez al
corte del suelo, comprendido entre los límites indicados para cada forma espectral S1, S2, S3 y S4,
según las tablas 3.2, variando conjuntamente el amortiguamiento entre el 1% y el 5%. Para cada
forma espectral se generaron 3 acelerogramas simulados, utilizando el Programa de computación
SIMQKE, que genera un número requerido de acelerogramas en función de un espectro de
velocidad, el cual, se determinó de los espectros de aceleración normalizados de la Norma
Venezolana COVENIN 1756-2001, característicos para cada forma. Se consideró para la generación
de los acelerogramas un amortiguamiento del 5% y una aceleración espectral máxima de Ao = 0.20
74
que correspondiente a una zona sísmica III. Con ayuda del mismo programa se determinó un
espectro de aceleración promedio, para cada formas S1, S2, S3 y S4, el cual, que se comparó con
los valores que caracterizan los espectros suministrados de la Norma COVENIN y se determinó que
los mismos cumplen con los valores medios de estos espectros. Como los acelerogramas son un
conjunto de datos aleatorios que proporcionan la variación de la aceleración con el tiempo,
generalmente, a intervalos de tiempo iguales y lo más importante es que no existe una frecuencia
definida, pero prevalecen algunas frecuencias por el número de picos por segundo. Para determinar
dichas frecuencias y los períodos dominantes de cada acelerograma, se utilizó un Programa de
computación denominado Degtra2000, que determina el dominio de frecuencia utilizando el espectro
de Fourier para un determinado acelerograma, representado en graficas en escala logarítmica. Estas
frecuencias o períodos dominantes nos llevan a verificar si la estructura entra en resonancia en el
tiempo cuando básicamente, su período fundamental esté muy cerca de los períodos dominante.
Los gráficos correspondientes a los espectros normalizados de cada tipo de suelo, S1, S2, S3
y S4, los acelerogramas simulados para cada forma espectral, los espectros generados promedio
correspondientes a estos acelerogramas y los espectros de dominio de frecuencia de fourier,
también para cada forma, se encuentran en el Apéndice.
Después de realizar los análisis correspondientes a cada Pórtico de 4, 8, 12 y 20 pisos variando
el módulo de corte del suelo y el amortiguamiento se obtuvieron los siguientes resultados:
1. Se puede observar en los gráficos correspondientes a la variación del módulo de corte del
suelo con respecto a la respuesta del último nivel, en términos de desplazamiento,
aceleración, fuerza inercial y corte en la base, para todas las formas espectrales y para

75
todos los Pórticos analizados, que al variar la relación del amortiguamiento las curvas son
paralelas y la respuesta aumenta a medida que la relación de amortiguamiento disminuye,
esto de debe a que la relación de amortiguamiento se seleccionó constante, para la
estructura y su interfase suelo-fundación, mostrando mayor disipación de energía a medida
que aumenta la relación de amortiguamiento.
2. Los gráficos correspondientes a la variación del módulo de corte del suelo, en la forma
espectral S1 del edificio de 4 pisos se comporta igual que al considerar la estructura
empotrada (sin variación de la rigidez de la interfase) con un período fundamental alrededor
de 0.76 seg, prácticamente la respuesta es constante y ocurre lo mismo para cada variación
de la relación de amortiguamiento
3. Los períodos dominantes para la forma espectral S1, están alrededor de 0.40 seg,
prácticamente corresponde a el valor de la mitad del período fundamental del Edificio de 4
pisos analizado, cuya masa participativa del primer modo, está en el orden del 92%, por eso
no se observa irregularidad en la curva representativa de la respuesta. Con este tipo
excitación sísmica suministrada del acelerograma la estructura no entra en resonancia. Para
el edificio de 8 pisos su período fundamental es de 1.06 seg el cual tiene una contribución
del 83%, el segundo modo está cerca del período dominante 0.43 seg, pero su contribución
está en el orden del 10%. El edificio de 12 pisos tiene el período fundamental más alto en el
orden de 1.66 seg con una participación del 81% y es en el tercer modo que el período se
aproxima al periodo dominante, pero este solo participa el 6%. Por último el edificio de 20
pisos tiene un período fundamental de 2.17 seg con una participación del 76% y al igual que
76
el edificio de 12 pisos, es en su tercer modo que el período se acerca al período dominante
del sismo con una participación del 6%
4. Se puede observar para el edificio de 4 niveles que los desplazamientos en el último nivel
aumentan en relación a la intensidad de la excitación sísmicas definidas por las formas
espectrales S4>S3>S2>S1 ya que la relación Ao/g aumenta, también se observa que
cuando el módulo de rigidez aumentan, los desplazamientos, aumentan.
5. Los resultados obtenidos del análisis del edificio de 4 niveles para las formas espectrales S3
y S4 , son muy parecidos, son gráficas paralelas muy próximas, probablemente se debe a
que estos tipos de suelo son blandos y de características similares, básicamente la
diferencia entre ellos es que para la forma espectral S3 su intensidad y período
característico es menor que para S4
6. Se puede observar que la mayor influencia de los efectos de Interacción suelo-cimentación
son apreciables en estructuras fundadas en suelos blandos con características de la forma
espectral S3 o S4, los desplazamientos de la base de fundación son apreciables,
disminuyendo según aumenta el módulo de rigidez. Prácticamente después de que el
módulo de rigidez del suelo es mayor a 10000 ton/m² para todas las formas espectrales, su
comportamiento es similar al empotrado
7. Como los períodos de la estructura no dependen de la excitación sísmica inducida de
acuerdo con un tipo de forma espectral, sino directamente de la rigidez y de la masa de la
estructura. La consideración de los efectos de la interacción suelo-cimentación en la
estructura influyen en estos períodos ya que dependen del módulo de rigidez del suelo. El

77
período es mayor cuanto menor es el módulo de rigidez y tiende a ser constante cuando el
módulo de rigidez se parece al empotrado.
8. En el Edificio de 8 pisos se observa que la incidencias de las formas espectrales S1 y S2 no
son afectadas por la interacción suelo estructura, prácticamente cuando el módulo de rigidez
es mayor que 10000 ton/m² estamos en presencia del empotramiento. Por otro lado, en las
formas espectrales S3 y S4 si existe influencia del efecto de interacción suelo-cimentación,
ambas gráficas son paralelas ya que al igual del Edificio de 4 Niveles básicamente la
diferencia radica en que la forma espectral S4 es de mayor intensidad que la S3.
9. La forma espectral S4 y S3 en el Edificio de 8 pisos, presentan unos saltos o picos cuando el
período fundamental de la estructura tiene un valor de 1.277 seg, cual se aproxima al
periodo dominante de la forma espectral S3 y S4 igual a 1.28 seg, se puede observar que
los desplazamientos son mucho mayores que la forma empotrada, La estructura entre en
resonancia, lo contrario que ocurre en el edificio de 4 pisos que aunque también existe un
efecto de resonancia, se producen los saltos, los desplazamientos son mucho menores que
los que se producen en su forma empotrada.
10. El corte basal en el edificio de 8 niveles también alcanza su máximo en el mismo periodo
fundamental de la estructura y los efectos son similares a los del desplazamiento del último
nivel ya que están relacionados, los desplazamientos del último nivel, con la aceleración
correspondiente, por la frecuencia al cuadrado, la curva es la misma pero a una escala de
aceleración y el Corte Basal por el coeficiente de participación al cuadrado multiplicado por

78
la máxima aceleración inducida por la excitación, también produce la misma forma de la
curva a una escala de fuerzas.
11. En el Edificio de 12 pisos se observa que la incidencias de las formas espectrales S1 y S2
no son afectadas por la interacción suelo estructura, prácticamente cuando el módulo de
rigidez es mayor que 10000 ton/m² estamos en presencia del empotramiento. También para
las formas espectrales S3 y S4 cuando el módulo de rigidez es mayor que 15000 ton/m²
tienden a la forma empotrada.
12. La forma espectral S4 y S3 en el Edificio de 12 pisos, presentan unos saltos o picos cuando
el período fundamental de la estructura tiene un valor de 2.267 seg, y 1.831 seg, cual se
aproxima al periodo dominante de la forma espectral S3 y S4 igual a 2.276 seg, y 2.048 seg
se puede observar que los desplazamientos son mucho mayores que la forma empotrada,
La estructura entre en resonancia en estos periodos.
13. En el Edificio de 20 pisos se observa que la incidencias de las formas espectrales S1 y S2
no son afectadas por la interacción suelo estructura, prácticamente cuando el módulo de
rigidez es mayor que 10000 ton/m² estamos en presencia del empotramiento. También para
las formas espectrales S3 y S4 cuando el módulo de rigidez es mayor que 15000 ton/m²
tienden a la forma empotrada.
14. La forma espectral S4 y S3 en el Edificio de 20 pisos, presentan unos saltos o picos cuando
el período fundamental de la estructura tiene un valor de 2.30 seg, y 3.30 seg, cual se
aproxima al periodo dominante de la forma espectral S3 y S4 igual a 3.41 seg, y 2.28 seg se

79
puede observar, al igual que el Edificio de 12 pisos, que los desplazamientos son mucho
mayores que la forma empotrada, La estructura entra en resonancia en estos periodos.
15. Se verifica que a mayor altura de la edificación, los períodos son mayores, en consecuencia
los desplazamientos también lo son.
4.2 CONCLUSIONES
De los resultados obtenidos del análisis de los Pórticos de 4, 8, 12 y 20 pisos considerando los
efectos de la interacción Suelo-Cimentación, tomando en cuenta la variabilidad del módulo cortante
del suelo y la relación de amortiguamiento se puede concluir lo siguiente:
1. La incidencia de los efectos de la interacción suelo estructura tiene mayor importancia en suelos
cuya características físicas y dinámicas estén de acuerdo con las formas espectrales S3 y S4 y
cuyos módulos de corte sean inferiores a las 10000 ton/m².
2. En edificios altos fundados en suelos blandos pueden entrar en resonancia con excitaciones
sísmicas pertenecientes a formas espectrales S3 y S4 ya que sus periodos fundamentales son
altos y coincidentes con los períodos dominantes de la excitación y del suelo.
3. La respuesta de edificios altos o intermedios a excitaciones sísmicas caracterizadas por las
formas S3 y S4 pueden ser hasta un 25% mayor que la obtenida sin considerar los efectos de la
Interacción Suelo-Cimentación. Esto conlleva a que los edificios no tengan la rigidez suficiente
para cumplir con los desplazamientos relativos máximos entre pisos y derivas indicados en la
Norma.

80
4. En edificios relativamente bajos, fundados en suelos blandos, con relación de amortiguamiento
superior al 1%, el análisis sin considerar los efectos de la interacción suelo-cimentación está del
lado de la seguridad ya que la respuesta de la estructura para la condición empotrada es mucho
mayor que la analizada considerando dichos efectos, aunque los análisis tienden a dar los
mismos resultados a medida que se aumente la relación de amortiguamiento.
5. La función de la relación de amortiguamiento es muy importante ya que a mayor relación de
amortiguamiento la diferencia de la respuesta de la estructura a una excitación sísmica en
suelos tipo S3 y S4 con módulos de cortante relativamente bajos, con respecto a la condición
empotrada, tiende a minimizarse.
6. Cuando se observa que los desplazamientos en edificios altos o intermedios, considerando los
efectos de la interacción suelo-cimentación son mucho mayores que la condición empotrada,
(sin considerar los efectos de la interacción) fundados en suelos blandos y que en edificios
relativamente bajos, ocurre lo contrario. Esto hace que pueda ser importante el considerar este
efecto en el análisis, independientemente de la altura del edificio, pero dependiendo del
contenido de frecuencias del mismo.

REFERENCIAS
1. Academia de Ciencias Físicas Matemáticas y Naturales. “Diseño Sismorresistente Especificaciones y Criterios Empleados en Venezuela”, Grases G., José, (Coordinador). Edición Conmemorativa del Terremoto del 29 de Julio de 1967. Caracas, Julio 1997.
2. Bazán Zurita, E., y Meli Piralla, R., “Manual de Diseño Sísmico de
Edificios”, , Editorial Limusa, S.A., Editores Noriega, México, D.F. 1990. 3. Bazán Zurita, E., y Meli Piralla, R., “ Diseño Sísmico de Edificios”, ,
Editorial Limusa, S.A., Editores Noriega, México, D.F. 1999. 4. Chandrupatla Tirupathi y Belegundu Ashok. “Introducción al Estudio del
Elemento Finito en Ingeniería”, Prentice Hall Hispanoamericana, S.A, Mexico, Segunda Edición, 1999.
5. Colindres Selva, Rafael. “Dinámica de Suelos y Estructuras”, Editorial
Limusa, S.A. de C.V, Grupo Noriega Editores, México, . Segunda Edición, 1993.
6. COVENIN, “Edificaciones Sismorresistentes,” Covenin 1756, Venezuela
(2001). 7. COVENIN, “Estructuras de Concreto Armado para Edificaciones
Análisis y Diseño,” COVENIN 1753, Venezuela (1987). 8. Delgado Vargas, Manuel. “Notas de Interacción Suelo Estructura”,
Editorial Escuela Colombiana de Ingeniería, Bogotá, Colombia, 1998. 9. Delgado, Sebastián. “Cuantificación del daño Estructural en Pórticos
planos de Concreto Armado diseñados según la Norma COVENIN 1756-98 sometidos a excitaciones sísmicas”, Trabajo especial de grado para optar e titulo de Magíster Sciemtiarum en ingeniería estructural, Universidad del Zulia, Maracaibo, 2002.
10. Gonzalez Katiuska, Manares Richard, Paredes Isbelia ”La Interacción
Suelo-Estructura y su influencia en la respuesta sísmica de estructuras de edificios”, Trabajo especial de grado, Venezuela, Julio, 2001

82
11. Paz, Mario “ Dinámica Estructural, Teoría y Computación”. Editorial Reverté S.A. España, Tercera Edición 1992.
12. Sarcos Portillo, Antonio, Rodríguez Cuevas, Nectali. “Análisi dinámico
espacial de edificios con Interacción Suelo-Estructura” IMME- Facultad de Ingeniería de la U.C.V..”Boletín Técnico, Instituto de Materiales y Modelos Estructurales.” Publicidad Gráfica León, S.R.L, Volumen 37 N° 2, 1998
13. Sarcos Portillo, Antonio. “Efecto de la Rotación de la cimentación en la
Respuesta de Edificios sometidos a excitación sísmica”, IMME- Facultad de Ingeniería de la U.C.V..”Boletín Técnico, Instituto de Materiales y Modelos Estructurales.” Publicidad Gráfica León, S.R.L, Volumen 38 N° 3, 2000
14. Sarcos Portillo, Antonio “ Influencia de la Interacción Suelo-Estructura en
la Respuesta Sísmica Tridimensional de Edificios”, Trabajo de Ascenso para optar por la categoría de Profesor Titular. Universidad del Zulia, Facultad de Ingeniería, Escuela de Ingeniería Civil, Maracaibo, Septiembre 1997.
15. Thomson, William. “Teoría de Vibraciones. Aplicaciones”, Editorial
Prentice-Hall Hispanoamericana, S.A, Segunda Edición, México, 1982. 16. Uribe Escamilla, Jairo. “Análisis de Estructuras”, Editorial Escuela
Colombiana de Ingeniería, Bogotá, Colombia, Segunda Edición, 2000. 17. Vezga Taborda, César “Elementos de Ingeniería Sismorresistente”,
Maracaibo, Estado Zulia. 2002
BIBLIOGRAFÍAS
1. Academia de Ciencias Físicas Matemáticas y Naturales. “Diseño Sismorresistente Especificaciones y Criterios Empleados en Venezuela”, Grases G., José, (Coordinador). Edición Conmemorativa del Terremoto del 29 de Julio de 1967. Caracas, Julio 1997.
2. Bazán Zurita, E., y Meli Piralla, R., “Manual de Diseño Sísmico de
Edificios”, Editorial Limusa, S.A., Editores Noriega, México, D.F. 1990. 3. Bazán Zurita, E., y Meli Piralla, R., “ Diseño Sísmico de Edificios”, ,
Editorial Limusa, S.A., Editores Noriega, México, D.F. 1999. 4. Chandrupatla Tirupathi y Belegundu Ashok. “Introducción al Estudio del
Elemento Finito en Ingeniería”, Prentice Hall Hispanoamericana, S.A, Mexico, Segunda Edición, 1999.
5. Colindres Selva, Rafael. “Dinámica de Suelos y Estructuras”, Editorial
Limusa, S.A. de C.V, Grupo Noriega Editores, México, . Segunda Edición, 1993.
6. COVENIN, “Edificaciones Sismorresistentes,” Covenin 1756, Venezuela
(2001). 7. COVENIN, “Estructuras de Concreto Armado para Edificaciones
Análisis y Diseño,” COVENIN 1753, Venezuela (1987). 8. Delgado Vargas, Manuel. “Notas de Interacción Suelo Estructura”,
Editorial Escuela Colombiana de Ingeniería, Bogotá, Colombia, 1998. 9. Delgado, Sebastián. “Cuantificación del daño Estructural en Pórticos
planos de Concreto Armado diseñados según la Norma COVENIN 1756-98 sometidos a excitaciones sísmicas”, Trabajo especial de grado para optar e titulo de Magíster Sciemtiarum en ingeniería estructural, Universidad del Zulia, Maracaibo, 2002.
10. Gonzalez Katiuska, Manares Richard, Paredes Isbelia ”La Interacción
Suelo-Estructura y su influencia en la respuesta sísmica de estructuras de edificios”, Trabajo especial de grado, Venezuela, Julio, 2001
84
11. Marín Joaquín “Dinámica de Estructuras”. Universidad Central de
Venezuela, Cursos para Graduados, Caracas, 1979. 12. Mavila Francimar, Pierini Claudia ”Comparación de la Respuesta Sísmica
de Estructuras de Edificios Obtenida con el Programa ETABS y los Métodos paso aq paso de Wilson y Aceleración Constante”, Trabajo especial de grado, Venezuela, Abril, 2001.
13. Moreno Rubi S. y Muriá Vila D. “ Cálculo de la Respuesta Estructural de
un Edificio Instrumentado ante un Sismo de Gran Intensidad” . Instituto de Ingeniería UNAM, México 1994.
14. Newmark, Nathan M., “ Introducción a la Ingeniería Sismo- Resistente”,
Universidad Central de Venezuela, Facultad de Ingeniería, Escuela de Ingeniería Civil, Dpto. Ingeniería Estructural. Compilación J. Marin, Folleto de Estructuras Nº 10, Caracas, Noviembre 1979.
15. Newmark, Nathan y Rosenblueth, E., “Fundamentos de Ingeniería
Sísmica”, Editorial Diana México, Primera Edición , Julio 1976. 16. Paz, Mario “ Dinámica Estructural, Teoría y Computación”. Editorial
Reverté S.A. España, Tercera Edición 1992. 17. Picón Rodríguez, Ricardo A., “ Evolución de la Degradación de Rigidez en
Pórticos de Concreto Armado”. Tesis de Grado de Magíster en Ingeniería Estructural. Universidad de Los Andes. Facultad de Ingeniería. Mérida. (Noviembre 1999).
18. Rubín de Celis,S., y Muría Vila D., “Cálculo de la Respuesta Estructural de
un Edificio Instrumentado ante un Sismo de Gran Intensidad” . Instituto de Ingeniería UNAM. Coyoacán, México, D. F. 530-539
19 Sarcos Portillo, Antonio “ Influencia de la Interacción Suelo-Estructura en
la Respuesta Sísmica Tridimensional de Edificios”, Trabajo de Ascenso para optar por la categoría de Profesor Titular. Universidad del Zulia, Facultad de Ingeniería, Escuela de Ingeniería Civil, Maracaibo, Septiembre 1997.
20 Sarcos Portillo, Antonio, Rodríguez Cuevas, Nectali. “Análisi dinámico
espacial de edificios con Interacción Suelo-Estructura” IMME- Facultad de Ingeniería de la U.C.V..”Boletín Técnico, Instituto de Materiales y Modelos Estructurales.” Publicidad Gráfica León, S.R.L, Volumen 37 N° 2, 1998
85
21 Sarcos Portillo, Antonio. “Efecto de la Rotación de la cimentación en la Respuesta de Edificios sometidos a excitación sísmica”, IMME- Facultad de Ingeniería de la U.C.V..”Boletín Técnico, Instituto de Materiales y Modelos Estructurales.” Publicidad Gráfica León, S.R.L, Volumen 38 N° 3, 2000
22 Sozen, Mete A. “Introducción al Comportamiento de Edificios de
Concreto Armado”, Universidad Central de Venezuela, Facultad de Ingeniería, Escuela de Ingeniería Civil, Dpto. Ingeniería Estructural. Compilación J. Marin, Folleto de Estructuras Nº 14, Caracas, Noviembre 1979.
23 Tapia Galván, Manuel. “Interacción Suelo-Cimentación-Estructura bajo
Fuerzas Sísmicas”, Segunda Jornada de Ingeniería Sísmica, Auspiciadas por SOCVIS, UNIOMET, AVPC, SIDETUR. Caracas, Venezuela, 1990.
24 Thomson, William. “Teoría de Vibraciones. Aplicaciones”, Editorial
Prentice-Hall Hispanoamericana, S.A, Segunda Edición, México, 1982.
25 Uribe Escamilla, Jairo. “Análisis de Estructuras”, Editorial Escuela Colombiana de Ingeniería, Bogotá, Colombia, Segunda Edición, 2000.
26 Vezga Taborda, César “Elementos de Ingeniería Sismorresistente”,
Maracaibo, Estado Zulia. 2002
27 Zeevaert Leonardo.,”Interacción Suelo-Estructura de Cimentación”. Editorial Limusa, S.A , Mexico, 1980.

APENDICE 1

APENDICE 2


















