
Rectas - Aplicaciones a la Econom a - Transformaciones de ... · Dos rectas siempre cumplen una y s...
40
Clase PD4 Matem´ aticas I “Rectas - Aplicaciones a la Econom´ ıa - Transformaciones de Coordenadas” 20 de septiembre de 2019
Transcript of Rectas - Aplicaciones a la Econom a - Transformaciones de ... · Dos rectas siempre cumplen una y s...

Clase PD4
Matematicas I
“Rectas - Aplicaciones a la Economıa -
Transformaciones de Coordenadas”
20 de septiembre de 2019
1

PD4
Distancia en el Plano. Definimos la distancia entre P y Q como:
d(P,Q) =√
(x2 − x1)2 + (y2 − y1)2
P (x1, y1)
Q(x2, y2)
x
y

PD4
Propiedades de la distancia. Sean P,Q,R ∈ R2 puntos del plano. Entonces
� d(P,Q) ≥ 0
� d(P,Q) = 0↔ P = Q
� d(P,Q) = d(Q,P )
� d(P,R) ≤ d(P,Q) + d(Q,R)
P
QR
x
y

PD4
Punto medio. Sean P,Q,R ∈ R2 puntos del plano. Entonces
� M =P +Q
2
� d(P,M) = d(M,Q)
� M : Punto medio del segmento PQ
P
Q
M
x
y

PD4
Pendiente. Sean P (x1, y1) y Q(x2, y2) dos puntos distintos en el plano R2. Definimos la
pendiente entre estos dos puntos pend(P,Q) como:
pend(P,Q) =
y2 − y1x2 − x1
, si x1 6= x2 (razon de cambio)
vertical, si x1 = x2.
P
Q
x
y

PD4
Definicion. Dados P,Q ∈ R2 dos puntos distintos del plano, tenemos:
pend(P,Q) ∈ R ∨ pend(P,Q) es vertical
Denotamos por
R = R ∪ {vertical}
al conjunto de todas las posibles pendientes.

PD4
Propiedades.
� Dados P y Q dos puntos distintos del plano. Entonces
pend(P,Q) = pend(Q,P )
� Dados P,Q y R tres puntos distintos dos a dos del plano y m ∈ R. Si
pend(P,Q) = pend(Q,R) = m
entonces
pend(P,R) = m.

PD4
Recta. Sean m ∈ R y P ∈ R2 un punto en el plano. Definimos el conjunto
l(m, p) = {Q ∈ R2 : Q = P ∨ pend(P,Q) = m} ⊂ R2
Como la recta de pendiente m y que pasa por el punto P (punto de paso).
l = l(m,P )
Q
P
x
y

PD4
Teorema. En una recta cualquier par de puntos diferentes tienen la misma pendiente.
pend(P,Q) = pend(R, S)
l = l(m,P )
P
Q
RS
x
y

PD4
Teorema. Sean l1 = l(m1, P1) y l2 = l(m2, P2) dos rectas (m1,m2 ∈ R).
� Si P1 = P2, entonces
l1 = l2 ↔ m1 = m2.
� Si P1 6= P2, entonces
l1 = l2 ↔ m1 = m2 = pend(P1, P2).
l1 = l2
x
y

PD4
Teorema. Dos rectas siempre cumplen una y solo una de las siguientes condiciones.
� Son iguales.
� Se intersectan en un solo punto.
� No se intersectan.
l1 = l2
x
yl1
l2x
y
l1 l2
x
y

PD4
Intercepto. Si una recta intersecta el eje x en un unico punto (a, 0) entonces el x-intercepto
es la constante a.
Intercepto. Si una recta intersecta el eje y en un unico punto (0, b) entonces el y-intercepto
es la constante b.
l = l(m,P )(0, b)
(a, 0)x
y

PD4
Ecuacion punto-pendiente de la recta. Si m ∈ R y P = (x0, y0) entonces
l(m,P ) = {(x, y) ∈ R2 : y − y0 = m(x− x0)}
l = l(m,P )
Q
P
x
y
Observacion: La ecuacion punto-pendiente no admite representacion unica.

PD4
Ecuacion pendiente-intercepto de la recta. La ecuacion de una recta de pendiente real m
se puede expresar como
l(m,P ) = {(x, y) ∈ R2 : y = mx+ b}
donde b es el y-intercepto.
l = l(m,P )(0, b)
x
y
Observacion: La ecuacion pendiente-intercepto admite representacion unica.

PD4
Ecuacion doble-intercepto de la recta. Si los interceptos de la recta son no nulos, entonces
la ecuacion de la recta se puede expresar como
l(m,P ) ={(x, y) ∈ R2 :
x
a+
x
b= 1}
donde a es el x-intercepto y b es el y-intercepto.
l = l(m,P )(0, b)
(a, 0)x
y
Observacion: La ecuacion doble-intercepto admite representacion unica.

PD4
Ecuacion general de la recta. Toda recta tiene una ecuacion de la forma
l = l(m,P ) ={(x, y) ∈ R2 : Ax+By + C = 0
}donde A,B,C son constantes. Esta ecuacion se denomina ecuacion general de la recta.
l
x
y
Observacion: Las constantes A y B no pueden ser ceros a la vez (A2 + B2 6= 0). La ecuacion
general no admite representacion unica.

PD4
Pendiente vertical. Si la pendiente es vertical, la recta satisface la ecuacion
x = a

PD4
Paralelismo. Dos rectas son paralelas cuando son iguales o no se intersectan.
� Si l1 y l2 son paralelas usaremos la notacion ll ‖ l2.
Propiedad. Dos rectas son paralelas si y solamente si tienen la misma pendiente.
� ll ‖ l2 ↔ m1 = m2.
l1 = l2
x
y
l1 l2
x
y

PD4
Perpendicularidad. Dos rectas son perpendiculares cuando el angulo entre ellas es recto (90◦).
� Cuando l1 y l2 son perpendiculares usaremos la notacion ll ⊥ l2.
Propiedad. Dos rectas l1 = l1(m1, P1) y l1 = l2(m2, P2) con m1,m2 ∈ R− {0} son perpendi-
culares si y solamente si
m1 ·m2 = −1
� ll ⊥ l2 ↔ m1 ·m2 = −1.
l1
l2x
y

PD4
Diccionario. Denotamos por p al precio unitario de un producto y por q al numero de unidades
de dicho producto. Ambas se asumen usualmente como numeros reales no negativos, es decir,
elementos del conjunto R+0 = {x ∈ R : x ≥ 0}.
Oferta. La oferta es una relacion O ⊂ R+0 × R+
0 donde (q, p) ∈ O representa el precio unitario
p que un productor esta dispuesto a vender por q unidades de un bien.
Demanda. La demanda es una relacion D ⊂ R+0 × R+
0 donde (q, p) ∈ D representa el precio
unitario p que un comprador esta dispuesto a pagar por q unidades de un bien.

PD4
Observacion. Una de las leyes de la oferta y demanda nos dice que un aumento en el precio
tiende a disminuir la demanda D y a aumentar la oferta O. Entonces las siguientes figuras pueden
representar la oferta y demanda de un bien en el caso que sean lineales.
O
q
p
D q
p

PD4
Punto de equilibrio. El punto de equilibrio entre la oferta y la demanda es el punto (qe, pe)
donde la oferta y la demanda se intersectan, es decir, O ∩D = {(qe, pe)}.
� pe:= precio de equilibrio (o precio del mercado).
� qe:= cantidad de equilibrio (o cantidad de mercado).
qe
pe
O
D
(qe, pe)
q
p

PD4
Excedente del consumidor. El excedente del consumidor (EC) es el area encerrada por la
demanda, el eje p y la recta horizontal p = pe.
Excedente del consumidor. El excedente del productor (EP) es el area encerrada por la oferta,
el eje p y la recta horizontal p = pe.
Excedente. Tambien se define el excedente como la suma del excedente del consumidor y el
excedente del productor.
qe
pe
O
D
(qe, pe)EC
q
p
qe
pe
O
D
(qe, pe)EP
q
p

PD4
Observacion:
� Si la ecuacion la Oferta es lineal:
O : p = mq + b.
La pendiente nos dice cuantas unidades monetarias adicionales debe aumentar el precio
para ofertar una unidad adicional.
� Si la ecuacion de la Demanda es lineal:
D : p = mq + b.
La pendiente nos dice cuantas unidades monetarias debe disminuir el precio para comprar
una unidad adicional

PD4
Diccionario.
� q : Numero de unidades que se fabrican de un bien.
� p : Precio unitario.

PD4
Ingreso, Costo y Utilidad.
� El Ingreso, I, de define por I = pq.
� El costo fijo: Cf , es el que se mantiene constante durante el proceso de produccion.
� El costo variable se define como: Cv = qCu, donde Cu es el costo unitario de produccion.
� El costo o costo total: C, se define por C = Cf + Cv = Cf + qCv.
� La utilidad: U , se define como U = I − C = p(q − Cu)− Cf .

PD4
Observacion: Como vemos, existe una relacion entre el ingreso y las unidades producidas ası
como tambien entre el costo y las unidades producidas. Podemos entonces pensar en ellas como
relaciones, subconjuntos de R+0 × R+
0 . Definimos el punto de equilibrio en este contexto como
la interseccion del ingreso con el costo. Si dicho punto es (q0,M0) entonces q0 es el nivel de
produccion de equilibrio y M0 se denomina monto de equilibrio.
q0
M0
CI
(q0,M0)
q
S/.
PD4
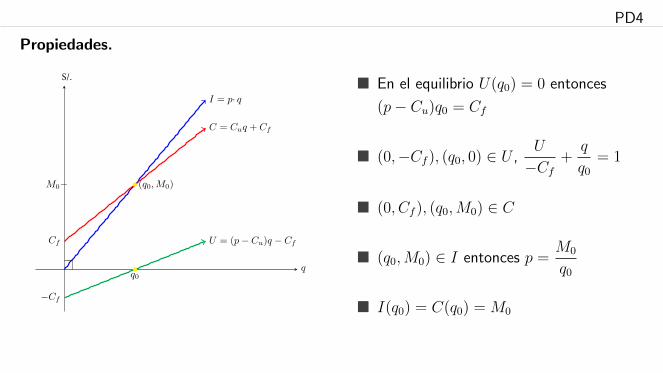
Propiedades.
I = p· q
C = Cuq + Cf
U = (p− Cu)q − Cf
(q0,M0)
Cf
−Cf
q0
M0−
q
S/. � En el equilibrio U(q0) = 0 entonces
(p− Cu)q0 = Cf
� (0,−Cf ), (q0, 0) ∈ U ,U
−Cf
+q
q0= 1
� (0, Cf ), (q0,M0) ∈ C
� (q0,M0) ∈ I entonces p =M0
q0
� I(q0) = C(q0) = M0

PD4
Propiedades.
I = p· q
C = Cuq + Cf
U = (p− Cu)q − Cf
(q0,M0)
Cf
−Cf
q0
M0−
q
S/. � p : precio de venta unitario, q : unidades
producidas y vendidas
� U(nq) = nU(q) + (n− 1)Cf , n ∈ Q
� U(q0 + k) = k(p− cu) para todo k ∈ N
� U(q) = 0⇔ q = q0
� Analice la utilidad en los intervalos ]0, q0[
, ]q0,+∞[.

PD4
Transformaciones de coordenadas.
Traslaciones. Sean h, k ∈ R constantes. Una traslacion de coordenadas es una relacion en R2
que asigna a cada coordenada (x, y) ∈ R2 la coordenada (x′, y′) ∈ R2 definida por las ecuaciones
x′ = x− h y′ = y − k

PD4
Observaciones:
� Cuando k = 0 la traslacion se dice horizontal.
� Cuando h = 0 la traslacion se dice vertical.
� Denotamos la traslacion por TP donde P = (h, k) y podemos entenderla como la
traslacion que lleva el punto P al origen.
� Si Q = (x, y) entonces usamos la notacion
TP (Q) = Q′ = (x′, y′)

PD4
Representacion grafica de una traslacion: www.desmos.com

PD4
Re-escalamiento: Sean h, k ∈ R constantes positivas. Un re-escalamiento de coordenadas es
una relacion en R2 que asigna a cada coordenada (x, y) ∈ R2 la coordenada (x′, y′) ∈ R2 definida
por las ecuaciones
x′ =1
h· x y′ =
1
k· y

PD4
Observaciones:
� Cuando k = 1 el re-escalamiento es horizontal.
� Cuando h = 1 el re-escalamiento es vertical.
� Denotamos el re-escalamiento por EP donde P = (h, k).
� Podemos pensar en esta transformacion de coordenadas como una transformacion que re-
escala el eje de abscisas por el factor h y el eje de ordenadas por el factor k.
� Si Q = (x, y) entonces usamos la notacion
EP (Q) = Q′ = (x′, y′)

PD4
Representacion grafica de un re-escalamiento: www.desmos.com

PD4
Reflexiones. Sean l ⊂ R2 una recta, P = (x, y) ∈ R2. Definimos la reflexion de P a traves de
la recta l como Q = (x′, y′) ∈ R2 de la siguiente manera.
� Si P ∈ l entonces Q = P .
� Si P /∈ l entonces construimos la recta r tal que P ∈ r y r ⊥ l. Sea R el punto de
interseccion de l con r. Definimos Q como el punto tal que R es el punto medio entre P
y Q.
� La recta l se denomina eje de reflexion.
� Si Q = (x, y) entonces usamos la notacion
Rl(Q) = Q′ = (x′, y′)

PD4
Observacion. Si hacemos esto con todos los puntos del plano a esta la llamamos una reflexion
del plano cartesiano a traves del eje l y lo denotamos por Rl. Si Q = (x, y) entonces usamos la
notacion Rl(Q) = Q′ = (x′, y′).

PD4
Composicion. Sean S1 y S2 dos transformaciones de coordenadas cualesquiera. Si aplicamos
primero S1 y luego S2 llamaremos tambien al resultado una transformacion de coordenadas. De-
notaremos dicha transformacion por S2◦S1 y la llamamos la composicion de dos transformaciones
(notemos que el orden se lee de derecha a izquierda).

PD4
Teorema:
� Cuando el eje de reflexion es el eje de las ordenadas la reflexion se dice horizontal, se denota
por Rh , y se puede probar que
x′ = −x y′ = y
� Cuando el eje de reflexion es el eje de las abscisas la reflexion se dice vertical, se denota
por Rv , y se comprueba que
x′ = x y′ = −y
� Si el eje de reflexion es la recta determinada por la ecuacion y = x la reflexion es diagonal,
se denota por Rd, y podemos demostrar que
x′ = y y′ = x
�

PD4
Teorema:
� El resultado de una reflexion horizontal seguida de una reflexion vertical se denomina refle-
xion a traves del origen, se denota por RO = Rv ◦Rh , y se calcula directamente que
x′ = −x y′ = −y
� El resultado de una reflexion diagonal seguida de una reflexion horizontal es
Rπ2= Rh ◦Rd y se puede demostrar que esta es una rotacion por un angulo recto.
Se calcula directamente que
x′ = −y y′ = x














![COMPARACIÓN DE LOS DIFERENTES MÉTODOS DE ......inhibición (2), el patrón de líneas rectas para dife-rentes concentraciones de sustrato se intersectan en [I]=-Ki y l/v=[l-(Ki/Ki´)/Vmax](https://static.fdocuments.ec/doc/165x107/5e9ced40df75ab44155f5070/comparacin-de-los-diferentes-mtodos-de-inhibicin-2-el-patrn-de.jpg)


