Puesta a punto de un Sistema de Control Multiaxial...
160
Puesta a punto de un Sistema de Control Multiaxial para ensayos dinámicos JUAN DE DIOS MARTÍNEZ DE PABLOS Ingeniería Industrial Tutores: Pedro Galvín Barrera y Mario Solís Muniz Sevilla, Mayo de 2006 Escuela Superior de Ingenieros de Sevilla UNIVERSIDAD DE SEVILLA PROYECTO FIN DE CARRERA
Transcript of Puesta a punto de un Sistema de Control Multiaxial...

Puesta a punto de un Sistema de Control
Multiaxial para ensayos dinámicos
JUAN DE DIOS MARTÍNEZ DE PABLOS
Ingeniería Industrial
Tutores: Pedro Galvín Barrera y Mario Solís Muniz
Sevilla, Mayo de 2006
Escuela Superior de
Ingenieros de Sevilla
UNIVERSIDAD DE SEVILLA
PROYECTO FIN DE CARRERA
1
ÍNDICE
0. Introducción ……………………………………………………………………… 2
1. Controlador FlexTest IIm ……………………………………………………… 4
1.A Constructor de Estación ……………………………………………… 5
1.B Manejador de Estación ………………………………………………… 15
2. Estudio de una pletina a flexión ……………………………………………… 42
3. Calibración y ensayo de una célula de carga para el equipo de MTS ………55
4. Estudio de una ménsula en vibración libre …………………………………… 62
5. Análisis experimental de un pórtico de nudos articulados y rígidos…………71
5.1 Estructura de nudos articulados ………………………………………72
5.2 Estructura de nudos rígidos ………………………………………… 100
5.3 Diferencias entre estructura articulada y rígida ……………………127
6. Diseño de una nueva estructura de nudos articulados y rígidos …………136
7. Diseño de un útil-palanca para el equipo del laboratorio………………… 147
8. Conclusiones …………………………………………………………………… 158

2
0. INTRODUCCIÓN
El presente proyecto pretende dar una idea general del funcionamiento y
funcionalidad del Controlador FlexTest IIm de MTS que hay disponible en el
laboratorio del Departamento de Estructuras de la Escuela Superior de Ingenieros
de la Universidad de Sevilla.
A tal efecto se han preparado dos guiones básicos:
• En el guión del “Constructor de Estación” se hace referencia a cómo
configurar una estación de trabajo para disponer de los recursos deseados o
cómo conectar los distintos dispositivos de medida que queramos utilizar
para la realización de algún ensayo determinado.
• En el guión del “Manejador de Estación” se explica brevemente todo lo
necesario para poner en funcionamiento el Controlador, realizar la
calibración y sintonización de los dispositivos de medida o preparar y
programar los ensayos mediante la herramienta MPT (MultiPurpose
TestWare).
Además, con el fin de poner en práctica los conocimientos adquiridos en el manejo
y configuración del Controlador se ha realizado una serie de estudios
experimentales en el laboratorio del departamento, que consistieron en:
• Calibración y ensayo experimental de una célula de carga de tipo pletina.
• Calibración y ensayo experimental de una célula de carga de tipo barra.
• Calibración y ensayo experimental de un acelerómetro.
3
Posteriormente, y utilizando nuevamente el equipo de MTS, se realizó un estudio
sobre el comportamiento ante carga estática de un pórtico construido en el
laboratorio del departamento que puede presentar tanto uniones articuladas como
uniones rígidas, para comprobar las diferencias existentes entre ambas
disposiciones constructivas.
A la vista de los resultados obtenidos a partir de este estudio, se decidió diseñar
una nueva estructura de nudos articulados o rígidos que presentase mejores
condiciones que la estructura disponible en el laboratorio.
Por último, y para solventar el inconveniente de la baja capacidad de carga que
tiene el sistema hidráulico instalado en el laboratorio del departamento, se
procedió al diseño y construcción de un útil que nos permitiese hacer palanca
mediante uno de los actuadores del equipo de MTS y así poder realizar ensayos de
mayor carga.
4
1. CONTROLADOR FLEXTEST IIm
Antes de comenzar a explicar el funcionamiento del equipo que tenemos disponible
en el laboratorio del departamento convendría dar una idea general de qué es y
para qué sirve el Controlador FlexTest IIm.
El Controlador FlexTest IIm consiste principalmente en una estación que nos
permitirá controlar de forma simultánea o independiente distintos canales de
control o actuadores hidráulicos mediante los cuales podremos realizar ensayos
estáticos o dinámicos.
Estos canales de control presentan la ventaja con respecto a otros equipos de que
cada uno de ellos está equipado con una servoválvula, capaces de controlar tanto el
caudal como la presión de trabajo, por lo que nos proporcionan en todo momento
un control del actuador por fuerza y por desplazamiento.
Asimismo el Controlador FlexTest IIm viene equipado con un acondicionador de
señales para equipos de medida DC-AC como pueden ser células de carga o
transductores de desplazamiento, además de varias entradas y salidas analógicas y
digitales. Esto le otorga una gran utilidad a la hora de realizar ensayos que
requieran la presencia de una gran cantidad de equipos de medida pues mediante el
controlador podremos unificar el registro de todos ellos.
Así pues, a continuación se explicará el funcionamiento de las dos herramientas con
las que realizamos la configuración de las estaciones de trabajo (Constructor de
Estación) y la puesta en marcha de dichas estaciones (Manejador de Estación).
5
A. EL CONSTRUCTOR DE ESTACIÓN (Station Builder)
El objetivo de la siguiente memoria consiste en ofrecer una rápida visión del
funcionamiento del Constructor de Estación FlexTest IIm.
Este programa nos permitirá preparar las estaciones de trabajo para los distintos
ensayos que queramos realizar.
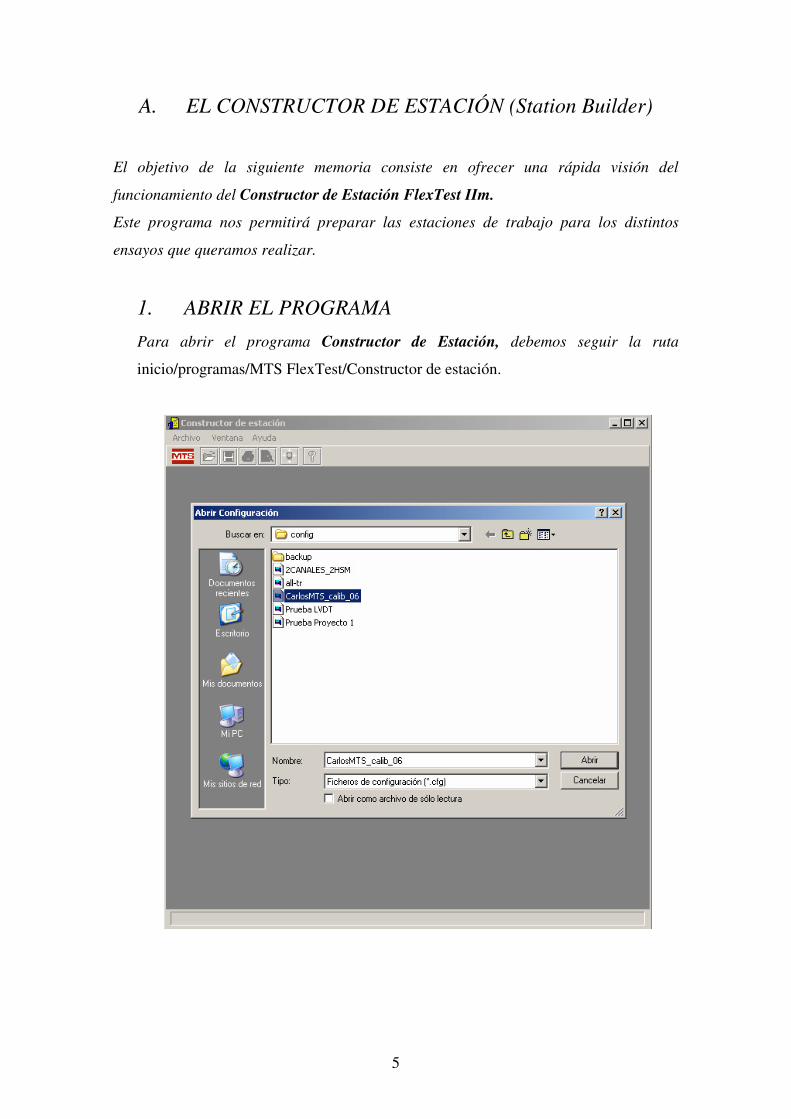
1. ABRIR EL PROGRAMA
Para abrir el programa Constructor de Estación, debemos seguir la ruta
inicio/programas/MTS FlexTest/Constructor de estación.

6
Mediante el constructor de estación podemos crear una estación de trabajo nueva o
bien editar una estación de trabajo ya existente si le hemos introducido alguna
modificación, como puede ser algún nuevo equipo de medida.
Si queremos construir una estación de trabajo nueva siempre es conveniente partir
de la estación de trabajo que nos ha dejado calibrada y configurada el equipo de
MTS. En ese caso abriríamos la estación “CarlosMTS_Calib_06”. Posteriormente
guardamos la estación con el nombre que queramos que tenga nuestra nueva
estación de trabajo, de forma que así relacionamos todos los archivos de
configuración y calibración a nuestra nueva estación.
Si por el contrario queremos editar una estación que ya hemos construido
anteriormente lo que haremos será abrir el archivo de dicha estación, por ejemplo
“Practica de teoría de estructuras” y realizarle todas las modificaciones que creamos
necesarias.

7
2. PREPARAR UNA ESTACIÓN NUEVA
Una vez que hemos abierto la estación “CarlosMTS_Calib_06” lo que nos aparece
es la siguiente ventana:
Iremos viendo uno a uno los componentes que pueden formar una estación de
trabajo.

8
2.1 CANALES
Los canales se corresponden con las servoválvulas que disponemos en el
laboratorio. En estos momentos tenemos funcionando dos servoválvulas (Ch 1 y Ch
2) con sus correspondientes actuadores, células de carga y LVDTs.
Si queremos que nuestra nueva estación mantenga el funcionamiento de los dos
canales de forma simultánea lo dejamos como está.
Si por el contrario queremos crear una estación en la que únicamente usaremos uno
de los actuadores, seleccionamos el canal que no vamos a utilizar en la ventana de
la izquierda y posteriormente pulsamos el botón de la ventana de la derecha,
eliminando así el control de dicho canal.
Otra opción que tenemos es que alguno de los actuadores únicamente pueda ser
controlado por fuerza o bien por desplazamiento. Para eliminar uno de los modos
de control de algún actuador, seleccionamos de la ventana de la izquierda el canal
que queremos modificar. Posteriormente seleccionamos el modo de control que
deseamos eliminar, y en la ventana de la derecha, dentro de la pestaña “modos de
control”, pulsamos el botón .
De forma análoga, si lo que deseamos es añadir un modo de control a alguno de los
canales, seleccionamos de los “Recursos Hardware de entrada” el recurso que
asociaremos al nuevo modo de control, y en la pestaña “modos de control”
pulsaremos el botón .
Más adelante veremos los distintos Recursos de Hardware que tenemos disponibles.
2.2 ENTRADAS AUXILIARES
La estación de trabajo está recibiendo continuamente las señales de medida que le
mandan la célula de carga y el LVDT de cada uno de los canales activados. Sin
embargo podemos recoger otras señales aparte de éstas, por ejemplo un LVDT
independiente. Para añadir una nueva entrada auxiliar abrimos la pestaña
“entradas auxiliares”. En la ventana “Recursos Hardware” pulsamos sobre la
señal que queramos añadir y pulsamos el botón . Posteriormente lo podemos
renombrar como queramos, pero manteniendo siempre el nombre interno
predefinido. Una vez incluida la configuramos de acuerdo a la magnitud que

9
estemos midiendo. Por defecto tiene activas y disponibles cuatro señales
analógicas, aunque también podemos añadirle otras señales tipo LVDT o Células
de carga.
2.3 SÁLIDAS DE LECTURA
Las salidas de lectura sirven para sacar a un equipo exterior (otro ordenador) de
forma analógica alguna de las señales que estemos midiendo en la estación.
Disponemos en nuestro equipo de cuatro salidas analógicas de lectura.
2.4 ENTRADAS Y SALIDAS DIGITALES
El equipo tiene disponibles hasta 8 entradas y salidas de señal digital (0 ó 1)
dobles.

10
3. AMPLIAR UNA ESTACIÓN DE TRABAJO
En este apartado vamos a ver las posibilidades que nos presenta el equipo FlexTest
IIm que tenemos instalado en el laboratorio. La configuración básica que venía de
fábrica es la que incluye dos canales de control (Actuadores 1 y 2) con dos modos
de control cada uno (por fuerza y por desplazamiento). Pero a esta configuración
básica podemos añadirle o quitarle canales de control, modos de control, equipos
de medida, extraer señales hacia otros equipos, etc.
Para ello es necesario conocer los distintos “Recursos Hardware” que tenemos
disponibles:
3.1 497.26 VD Chassis 1
Los drivers 497.26 VD o “ValveDrivers” son los “Recursos Hardware de Salida”
que llevan el control a las servoválvulas. Actualmente tenemos dos “ValveDriver”
ocupados, que son los 497.26.VD-13/1 (J1301) y 497.26.VD-14/1 (J1401) que se
corresponden con los canales 1 y 2 (Actuadores 1 y 2), y disponemos de otros dos
“ValveDriver” libres que son los 497.26.VD-15/1(J1501) y 497.26.VD-16/1(J1601).
Si quisiéramos ampliar el número de actuadores deberíamos conectar las
servoválvulas en estas entradas (que se encuentran en la parte de atrás del
Controlador FlexTest IIm), y mediante el “Constructor de Estación” añadir un
nuevo canal de control, con sus modos de control correspondientes. Posteriormente
tendríamos que configurar esta nueva servoválvula mediante el Manejador de
Estación.
3.2 497.14 AC Chassis 1
Los drivers 497.14 AC son un “Recurso Hardware de entrada” que se utilizan
típicamente para LVDTs. Alimentan en corriente alterna al transductor, reciben la
señal, la acondicionan y la llevan al control. Actualmente están disponibles las
entradas 497.14.AC-3 Chassis 1 (J301) y 497.14.AC-4 Chassis 1 (J401), (que se
encuentran en la parte de atrás del Controlador FlexTest IIm) y utilizan conectores
DB15.

11
Podemos utilizar estas entradas para realizar mediciones independientes de los
LVDTs que traen los actuadores. En ese caso añadiríamos el recurso hardware de
entrada 497.14 AC-x Chasis 1 como una nueva “entrada auxiliar” mediante el
Constructor de Estación. Posteriormente, mediante el Manejador de Estación
tendríamos que configurar el LVDT (alimentación, ganancia, fondo de escala, etc.).
También podríamos utilizar esta entrada como un nuevo modo de control para
algún actuador. En ese caso añadiríamos el recurso hardware de entrada 497.14
AC-x Chasis 1 como un nuevo modo de control para el canal correspondiente.
Posteriormente, mediante el Manejador de Estación tendríamos que configurar ese
nuevo modo de control.
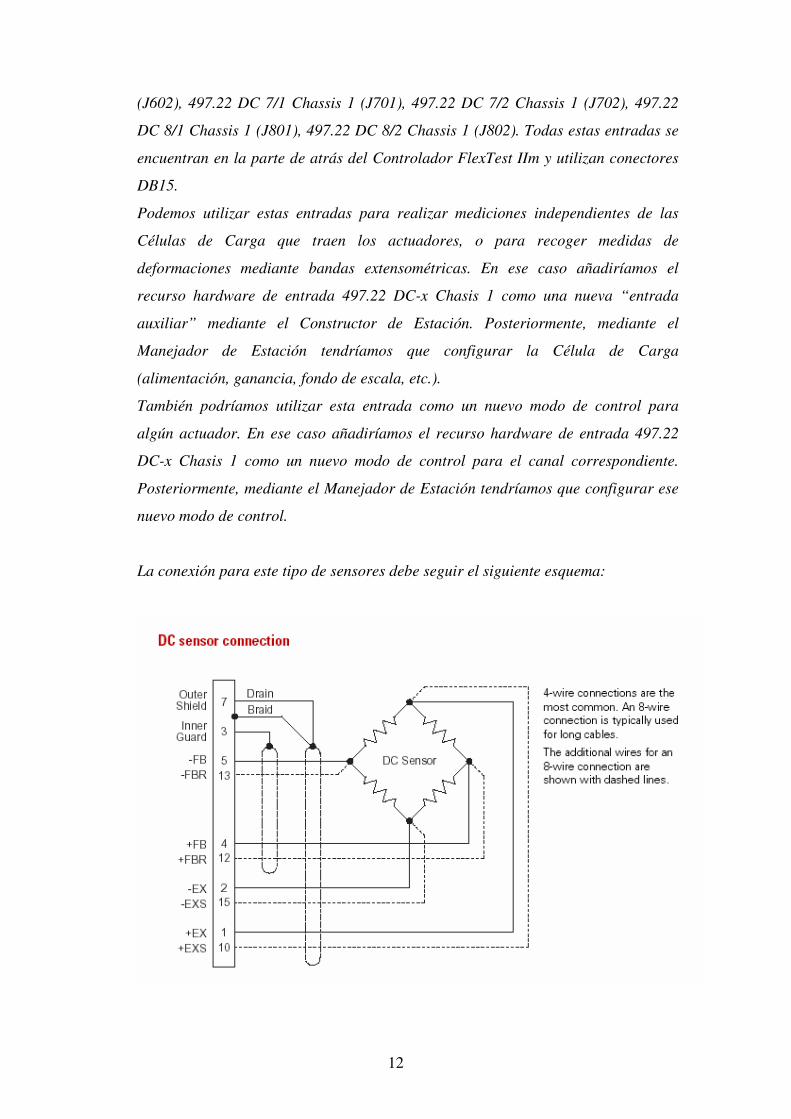
La conexión para este tipo de sensores debe seguir el siguiente esquema:
3.3 497.22 DC Chassis 1
Los drivers 497.22 DC son un “Recurso Hardware de entrada” que se utiliza
típicamente para Células de Carga. También se pueden utilizar para Bandas
Extensométricas siempre que se presenten en puente completo (interna o
externamente). Son entradas dobles, es decir, por cada una de ellas podemos
conectar dos células de carga. Alimentan en corriente continua a la Célula de
Carga, reciben la señal, la acondicionan y la llevan al control. Actualmente están
disponibles las entradas 497.22 DC 5/2 Chassis 1 (J502), 497.22 DC 6/2 Chassis 1
12
(J602), 497.22 DC 7/1 Chassis 1 (J701), 497.22 DC 7/2 Chassis 1 (J702), 497.22
DC 8/1 Chassis 1 (J801), 497.22 DC 8/2 Chassis 1 (J802). Todas estas entradas se
encuentran en la parte de atrás del Controlador FlexTest IIm y utilizan conectores
DB15.
Podemos utilizar estas entradas para realizar mediciones independientes de las
Células de Carga que traen los actuadores, o para recoger medidas de
deformaciones mediante bandas extensométricas. En ese caso añadiríamos el
recurso hardware de entrada 497.22 DC-x Chasis 1 como una nueva “entrada
auxiliar” mediante el Constructor de Estación. Posteriormente, mediante el
Manejador de Estación tendríamos que configurar la Célula de Carga
(alimentación, ganancia, fondo de escala, etc.).
También podríamos utilizar esta entrada como un nuevo modo de control para
algún actuador. En ese caso añadiríamos el recurso hardware de entrada 497.22
DC-x Chasis 1 como un nuevo modo de control para el canal correspondiente.
Posteriormente, mediante el Manejador de Estación tendríamos que configurar ese
nuevo modo de control.
La conexión para este tipo de sensores debe seguir el siguiente esquema:

13
3.4 Analog input
Las entradas analógicas nos permitirán recoger cualquier tipo de señal que
queramos con el inconveniente de que necesitaremos una alimentación y
acondicionamiento de la señal independiente. Recibe señales en el rango de -10 v +
10 v. Actualmente hay disponibles cuatro entradas analógicas: Aux input 1,2,3 y 4,
que se conectan en la parte de atrás del Controlador FlexTest IIm mediante un
conector BNC. Podemos utilizar estas entradas auxiliares del mismo modo que las
entradas 497.14 AC o las 497.22 DC.
3.5 Analog output
Su funcionamiento es análogo al de las entradas analógicas con la salvedad de que
se utilizan para enviar señales que registramos en nuestro equipo a otro equipo
independiente. Estas señales saldrán en el rango -10 v +10 v.
3.6 Digital input
Las entradas digitales sirven para enviar a nuestro equipo una señal digital (0 ó 1)
desde un equipo o dispositivo externo. Estas entradas alimentan y reciben la señal
con 12 voltios y utilizan conectores DB9. En cada conexión DB9 puede haber hasta
2 entradas digitales distintas. La conexión debe seguir el siguiente esquema:
Un ejemplo de la utilidad de este tipo de entradas puede ser un interruptor externo
al equipo de parada de seguridad. El interruptor manda de forma continuada una
señal “1” al Controlador FlexTest IIm. Si por alguna causa necesitáramos detener
de forma urgentemente el ensayo de forma externa, al pulsar el interruptor este

14
pasaría a mandar una señal “0” que el nuestro programa de ensayo reconocería
como una orden de parada automática.
3.7 Digital output
Las salidas digitales sirven para enviar a un equipo o dispositivo externo una señal
digital (0 ó 1) desde un nuestro propio equipo. Estas salidas alimentan y reciben la
señal con 12 voltios y utilizan conectores DB9. En cada conexión DB9 puede
haber hasta 2 salidas digitales distintas y deben seguir el mismo esquema que para
las entradas digitales.
15
B. EL MANEJADOR DE ESTACIÓN (Station Manager)
El objetivo de la siguiente memoria consiste en ofrecer una rápida visión del
funcionamiento del Manejador de Estación FlexTest IIm.
Este programa es el que nos permitirá tener un manejo total del equipo de MTS
como puede ser:
Control de actuadores
Realización de ensayos
Registro de datos
Calibración
Sintonización, etc.
1. ARRANCAR EL PROGRAMA
Para comenzar a utilizar el programa habrá que dar los siguientes pasos, siempre
en este mismo orden:
1º Encender el Controlador FlexTest IIm, que es la caja situada a la izquierda de la
mesa de trabajo, donde está todo el hardware de manejo de la servoválvula. El
controlador se enciende mediante un interruptor situado en la esquina inferior
izquierda de la caja.
2º Activar el grupo hidráulico girando la manivela de abajo a arriba. Se encenderá
una pequeña bombilla indicándonos que lo hemos activado. La posición de
encendido coincide con el rojo, y el apagado con el verde.
3º Abrir el programa Manejador de Estación, bien mediante el acceso directo
situado en el escritorio, bien siguiendo la ruta inicio/programas/MTS
FlexTest/Manejador de estación. Es importante abrir el Manejador de Estación
siempre después de haber encendido el Controlador. De lo contrario no funcionará
correctamente.
16
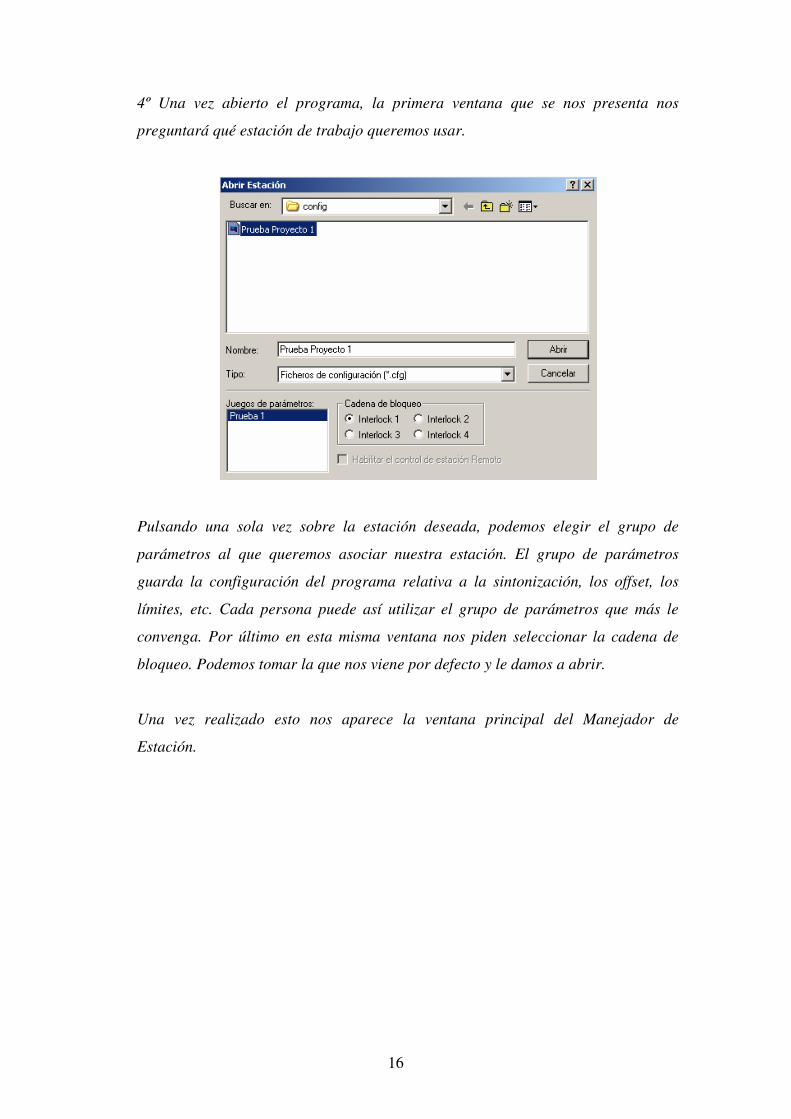
4º Una vez abierto el programa, la primera ventana que se nos presenta nos
preguntará qué estación de trabajo queremos usar.
Pulsando una sola vez sobre la estación deseada, podemos elegir el grupo de
parámetros al que queremos asociar nuestra estación. El grupo de parámetros
guarda la configuración del programa relativa a la sintonización, los offset, los
límites, etc. Cada persona puede así utilizar el grupo de parámetros que más le
convenga. Por último en esta misma ventana nos piden seleccionar la cadena de
bloqueo. Podemos tomar la que nos viene por defecto y le damos a abrir.
Una vez realizado esto nos aparece la ventana principal del Manejador de
Estación.

17
Vemos que el Manejador de estación se divide en dos ventanas principales: A la
derecha la ventana de los controles de estación, y a la izquierda la ventana del
programa que en cada momento tenemos abierto para manejar la estación
(Generador de Funciones, Basic TestWare o MultiPurpose TestWare).
Lo primero que debemos observar una vez abierto el programa es que tenemos un
bloqueo de la estación (Interlock 1), como medida de seguridad. Pulsamos el botón
de reinicializar, y si tenemos todos los actuadores dentro de su rango y límites
desaparecerá el bloqueo.
18
Una vez hecho esto podemos activar la hidráulica. Para ello utilizaremos los tres
botones que están justo debajo del Interlock 1.
Cuando queramos activar la presión hidráulica debemos empezar primero
activando la media presión, que es el botón de en medio, y posteriormente la alta
presión, que es el botón de la derecha. Cuando queramos desactivarla hacemos lo
mismo en el sentido contrario, primero la bajamos a media presión y por último a
presión nula, que es el botón de la izquierda.
Con estos pasos ya tenemos control sobre el o los actuadores. A continuación
explicaremos brevemente las funciones más útiles del programa a la hora de
realizar ensayos.

19
2. CONTROLES DE ESTACIÓN
Los controles de estación son el grupo de botones que aparecen en la ventana de la
derecha del Manejador de Estación.
a. Comando Manual
El comando manual nos permite tener un control manual sobre el actuador, tanto
por desplazamiento como por fuerza. Nos sirve fundamentalmente para posicionar
el actuador donde nos convenga, hacer comprobaciones, etc. Una vez abierta la
ventana del comando manual deberemos habilitarlo.
Una vez terminada la operación manual, si queremos realizar algún ensayo u otra
operación deberemos deshabilitar de nuevo el comando manual, pues es
predominante sobre las otras formas de comando.
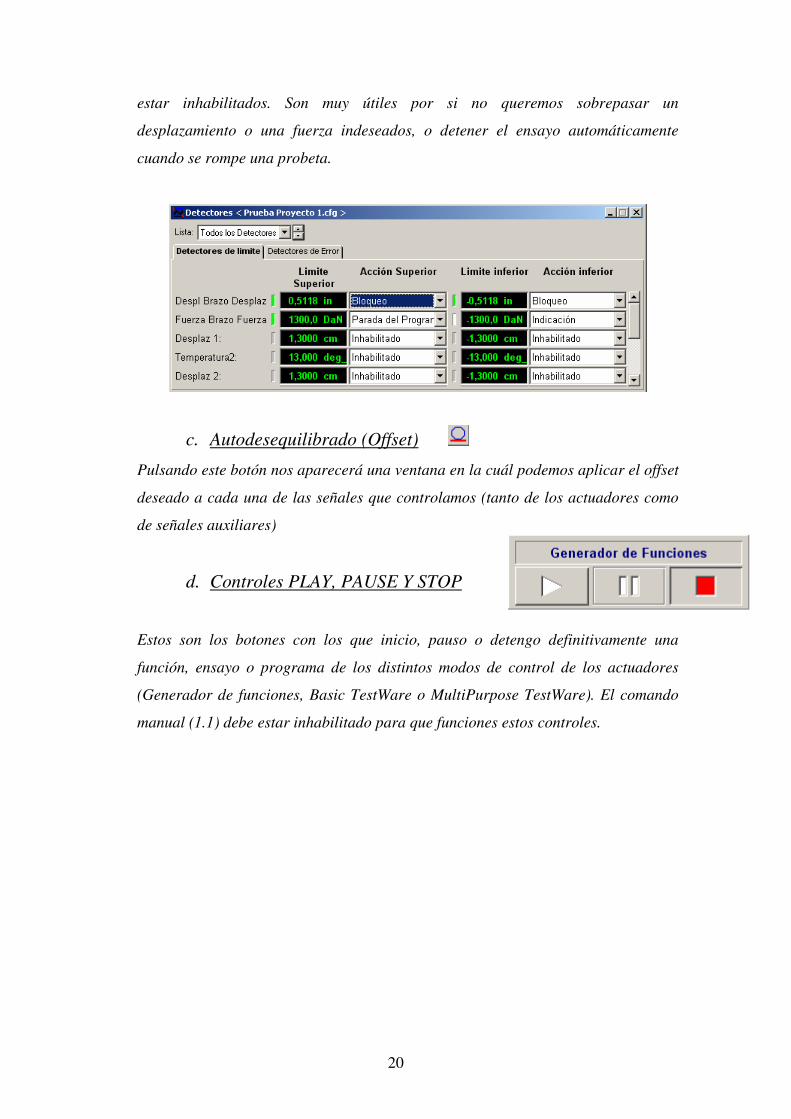
b. Detectores de límites
Los detectores de límite permiten marcar unos límites de funcionamiento de los
actuadores o señales auxiliares aparte de los de su propio rango, y en caso de
sobrepasarlos envían una señal de bloqueo, parada, pausa, etc. También pueden
20
estar inhabilitados. Son muy útiles por si no queremos sobrepasar un
desplazamiento o una fuerza indeseados, o detener el ensayo automáticamente
cuando se rompe una probeta.
c. Autodesequilibrado (Offset)
Pulsando este botón nos aparecerá una ventana en la cuál podemos aplicar el offset
deseado a cada una de las señales que controlamos (tanto de los actuadores como
de señales auxiliares)
d. Controles PLAY, PAUSE Y STOP
Estos son los botones con los que inicio, pauso o detengo definitivamente una
función, ensayo o programa de los distintos modos de control de los actuadores
(Generador de funciones, Basic TestWare o MultiPurpose TestWare). El comando
manual (1.1) debe estar inhabilitado para que funciones estos controles.
21
3. PROGRAMAS DE CONTROL DE ESTACIÓN
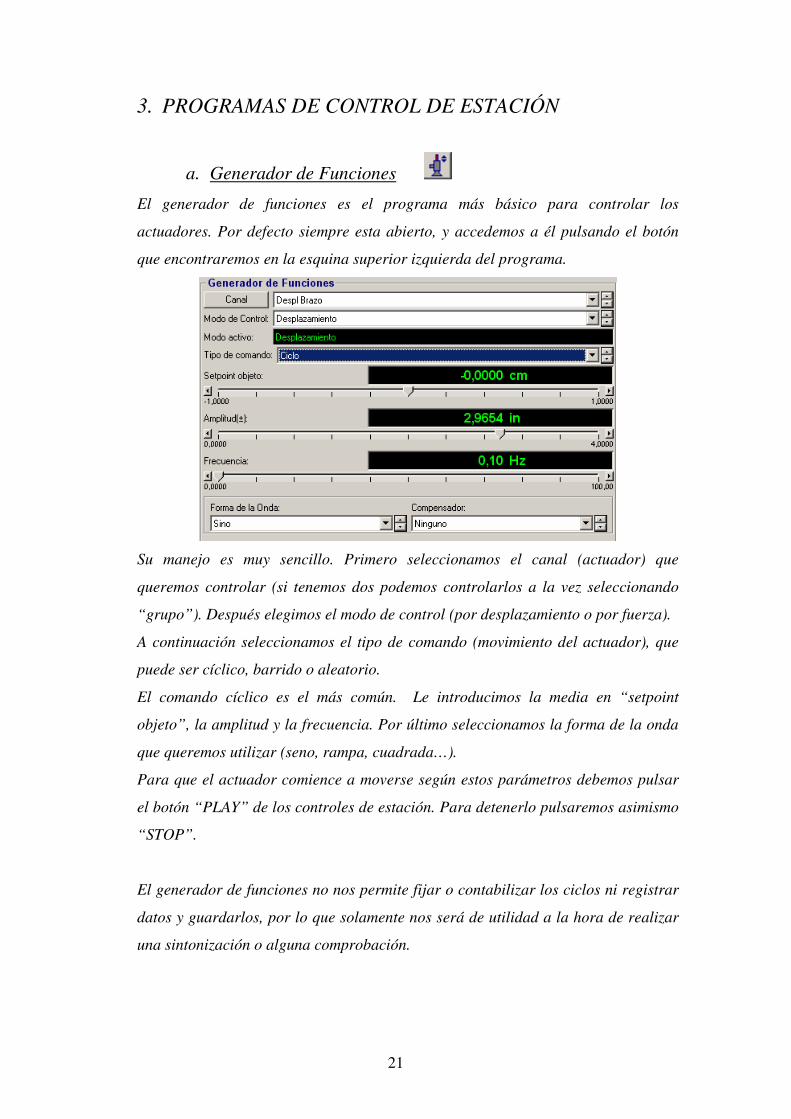
a. Generador de Funciones
El generador de funciones es el programa más básico para controlar los
actuadores. Por defecto siempre esta abierto, y accedemos a él pulsando el botón
que encontraremos en la esquina superior izquierda del programa.
Su manejo es muy sencillo. Primero seleccionamos el canal (actuador) que
queremos controlar (si tenemos dos podemos controlarlos a la vez seleccionando
“grupo”). Después elegimos el modo de control (por desplazamiento o por fuerza).
A continuación seleccionamos el tipo de comando (movimiento del actuador), que
puede ser cíclico, barrido o aleatorio.
El comando cíclico es el más común. Le introducimos la media en “setpoint
objeto”, la amplitud y la frecuencia. Por último seleccionamos la forma de la onda
que queremos utilizar (seno, rampa, cuadrada…).
Para que el actuador comience a moverse según estos parámetros debemos pulsar
el botón “PLAY” de los controles de estación. Para detenerlo pulsaremos asimismo
“STOP”.
El generador de funciones no nos permite fijar o contabilizar los ciclos ni registrar
datos y guardarlos, por lo que solamente nos será de utilidad a la hora de realizar
una sintonización o alguna comprobación.
22
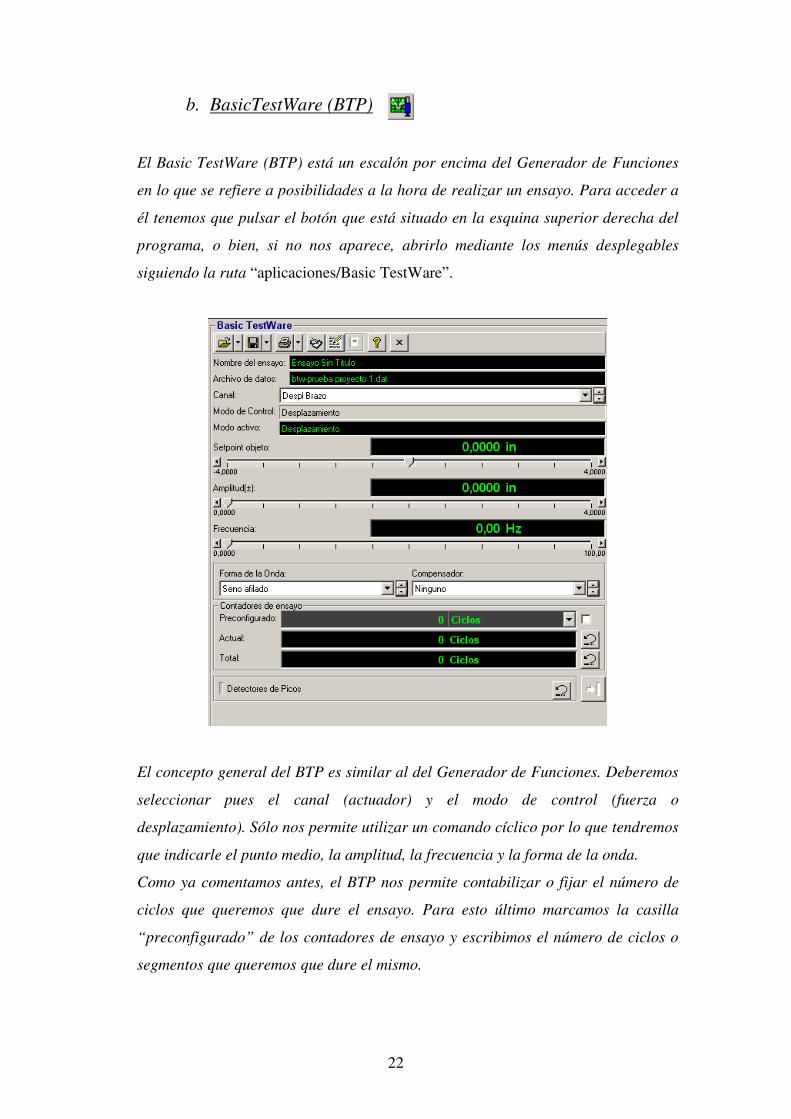
b. BasicTestWare (BTP)
El Basic TestWare (BTP) está un escalón por encima del Generador de Funciones
en lo que se refiere a posibilidades a la hora de realizar un ensayo. Para acceder a
él tenemos que pulsar el botón que está situado en la esquina superior derecha del
programa, o bien, si no nos aparece, abrirlo mediante los menús desplegables
siguiendo la ruta “aplicaciones/Basic TestWare”.
El concepto general del BTP es similar al del Generador de Funciones. Deberemos
seleccionar pues el canal (actuador) y el modo de control (fuerza o
desplazamiento). Sólo nos permite utilizar un comando cíclico por lo que tendremos
que indicarle el punto medio, la amplitud, la frecuencia y la forma de la onda.
Como ya comentamos antes, el BTP nos permite contabilizar o fijar el número de
ciclos que queremos que dure el ensayo. Para esto último marcamos la casilla
“preconfigurado” de los contadores de ensayo y escribimos el número de ciclos o
segmentos que queremos que dure el mismo.
23
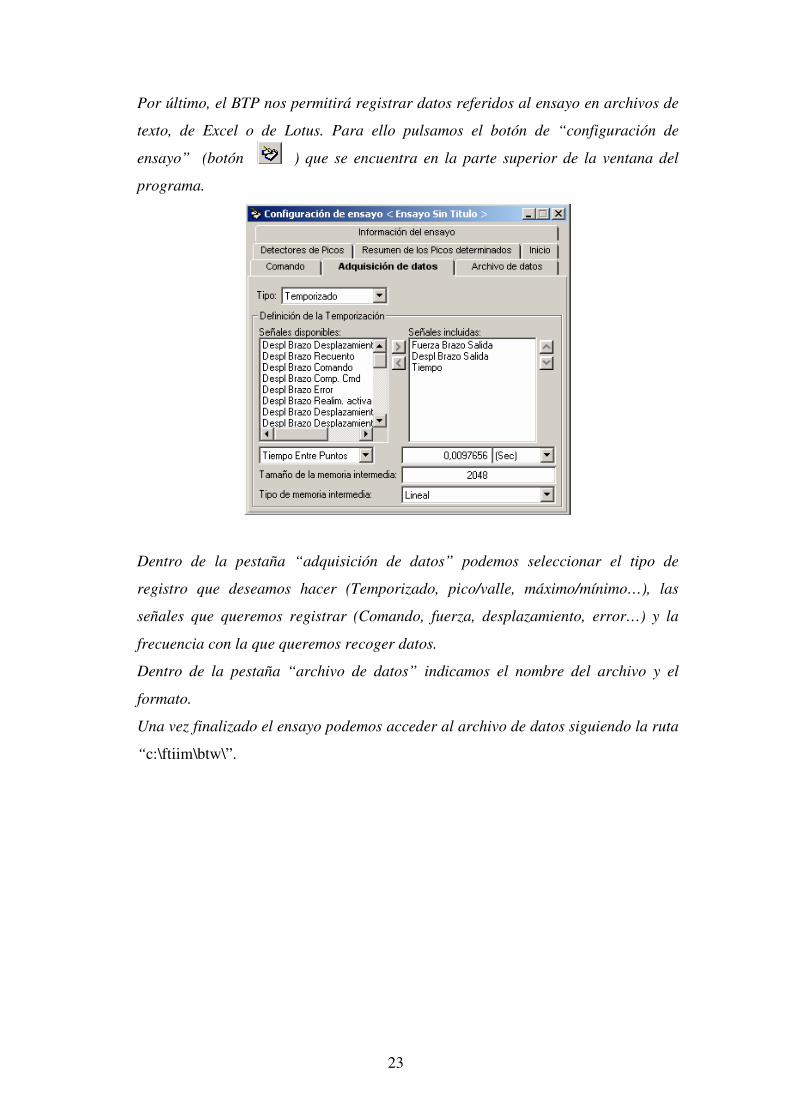
Por último, el BTP nos permitirá registrar datos referidos al ensayo en archivos de
texto, de Excel o de Lotus. Para ello pulsamos el botón de “configuración de
ensayo” (botón ) que se encuentra en la parte superior de la ventana del
programa.
Dentro de la pestaña “adquisición de datos” podemos seleccionar el tipo de
registro que deseamos hacer (Temporizado, pico/valle, máximo/mínimo…), las
señales que queremos registrar (Comando, fuerza, desplazamiento, error…) y la
frecuencia con la que queremos recoger datos.
Dentro de la pestaña “archivo de datos” indicamos el nombre del archivo y el
formato.
Una vez finalizado el ensayo podemos acceder al archivo de datos siguiendo la ruta
“c:\ftiim\btw\”.
24
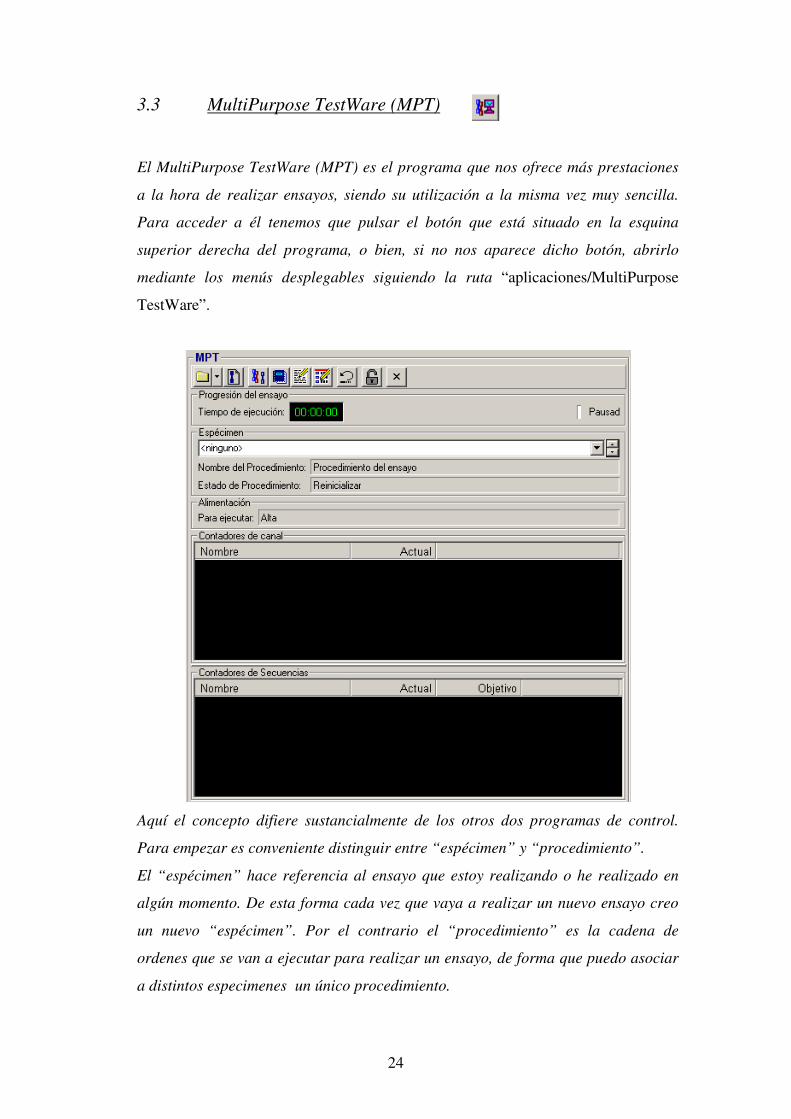
3.3 MultiPurpose TestWare (MPT)
El MultiPurpose TestWare (MPT) es el programa que nos ofrece más prestaciones
a la hora de realizar ensayos, siendo su utilización a la misma vez muy sencilla.
Para acceder a él tenemos que pulsar el botón que está situado en la esquina
superior derecha del programa, o bien, si no nos aparece dicho botón, abrirlo
mediante los menús desplegables siguiendo la ruta “aplicaciones/MultiPurpose
TestWare”.
Aquí el concepto difiere sustancialmente de los otros dos programas de control.
Para empezar es conveniente distinguir entre “espécimen” y “procedimiento”.
El “espécimen” hace referencia al ensayo que estoy realizando o he realizado en
algún momento. De esta forma cada vez que vaya a realizar un nuevo ensayo creo
un nuevo “espécimen”. Por el contrario el “procedimiento” es la cadena de
ordenes que se van a ejecutar para realizar un ensayo, de forma que puedo asociar
a distintos especimenes un único procedimiento.
25
3.3.1 Realización de un ensayo ya preparado
Si lo que queremos es realizar un ensayo que tenemos ya preparado, lo que tenemos
que hacer es crear un “nuevo espécimen” dándole un nombre, como
puede ser “Ensayo estructura articulada 25/2/06”. Posteriormente abrimos el
procedimiento que tenemos ya preparado para este tipo de ensayo.
A continuación le damos al botón de “reinicializar el procedimiento”
y pasamos al modo “ejecutar procedimiento” que se corresponde al candado
cerrado.
El ensayo se iniciará al pulsar el botón “PLAY” de los controles de estación, y se
detendrá mediante el botón “STOP” o de forma automática si así está indicado en
el procedimiento.
Una vez finalizado el ensayo podemos acceder al archivo de datos siguiendo la ruta
“c:\ftiim\mpt\specimens\”.
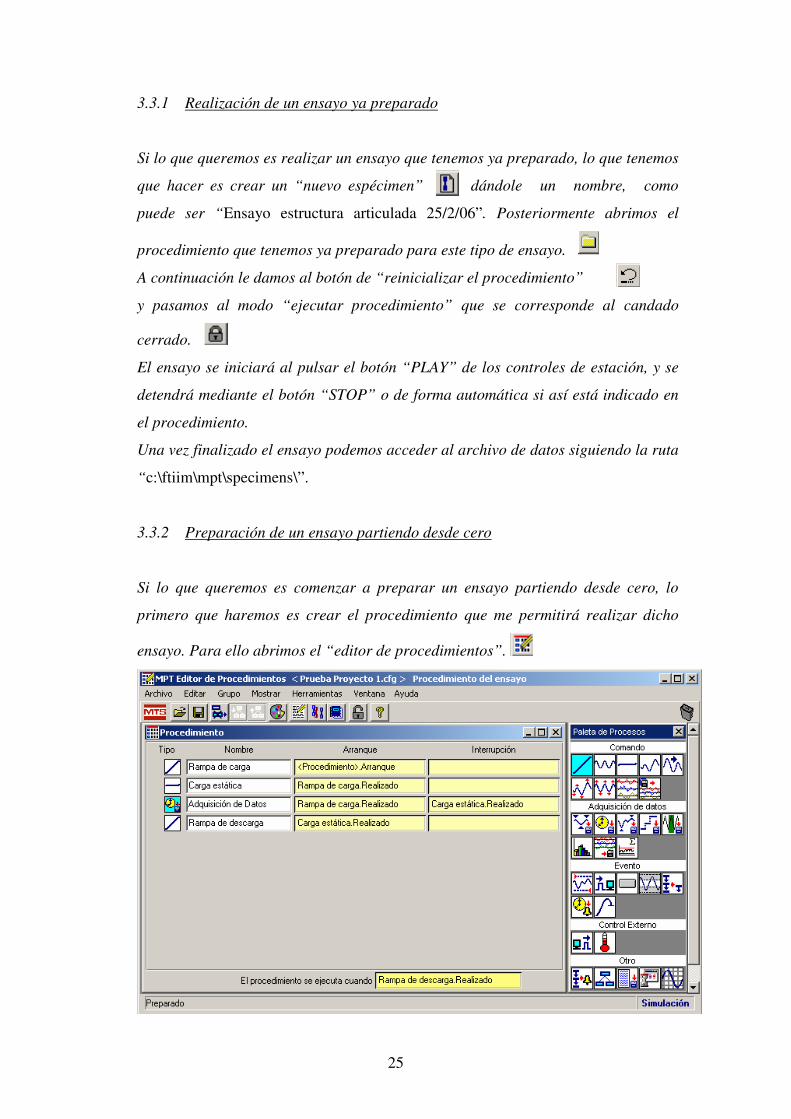
3.3.2 Preparación de un ensayo partiendo desde cero
Si lo que queremos es comenzar a preparar un ensayo partiendo desde cero, lo
primero que haremos es crear el procedimiento que me permitirá realizar dicho
ensayo. Para ello abrimos el “editor de procedimientos”.

26
La programación de un procedimiento es muy sencilla. Lo único que hay que hacer
es tomar de la paleta de procesos los comandos o acciones que queramos utilizar,
preferentemente en orden de modo que la secuencia del procedimiento sea más
intuitiva. Lo veremos con el siguiente ejemplo:
El primer proceso que realizará el procedimiento es un comando “Rampa” que se
iniciará cuando arranque el procedimiento. La interrupción de un proceso puede
ser interna o externa. Si fuese interna, como es nuestro caso, le diremos el nivel de
carga que queremos alcanzar. Si fuese externa, en el espacio “interrupción” le
indicamos el proceso que debe cumplirse para que deje de actuar dicha rampa.
El segundo proceso es un comando “pausa” de forma que mantiene el actuador en
el nivel de carga deseado durante el tiempo que queramos. Le hemos marcado un
arranque al finalizar el proceso 1 (Rampa de carga) y una interrupción interna.
El tercero es un “proceso de adquisición de datos”. Arrancará una vez se haya
realizado el proceso 1 (Rampa de carga) y lo interrumpiremos de forma externa
una vez haya finalizado el proceso 2 (Carga estática). Como podemos observar dos
procesos pueden estar ejecutándose a la vez.
El último proceso es un comando “Rampa” de descarga, el cual se inicia al
finalizar el proceso 2 (Carga estática) y finaliza de forma interna al indicarle
nosotros el nivel de descarga que queremos alcanzar.
Por último, al marcar en la casilla “el procedimiento se ejecuta cuando” Rampa de
descarga realizado, finalizará la ejecución del procedimiento de forma automática
cuando este último proceso concluya su función.
Una vez completado el procedimiento podemos realizar los pasos indicados en el
apartado anterior para realizar el ensayo.
A continuación pasaremos a explicar brevemente de la paleta de procesos los más
útiles a la hora de realizar un ensayo:

27
El primer tipo de proceso que podemos encontrar en la paleta de procesos es el
proceso “comando”, el cuál será el encargado de indicarle al actuador el
movimiento deseado.
Comando Rampa: Nos lleva el actuador a un nivel deseado siguiendo un
incremento proporcional. Pinchando sobre el icono de rampa que hemos arrastrado
hasta nuestra ventana de nuestro procedimiento nos aparece la ventana de opciones
para esta rampa:
Lo primero que debemos hacer para cualquier proceso de comando es indicar el
actuador que queremos controlar. Para ello entramos en la pestaña “canales” y
seleccionamos el o los actuadores (canales) deseados.
Posteriormente en la pestaña “comando” accedemos a las opciones para definir
ese comando.
En el caso de “comando rampa” le marcamos el tipo de rampa que queramos
ejecutar (forma del segmento, control por fuerza o desplazamiento, nivel final de
comando, etc.).
Comando cíclico: El actuador estará controlado de forma cíclica. Le debemos
introducir los datos correspondientes al tipo de ciclo deseado.
Comando pausa: Mantiene el actuador en el nivel alcanzado con anterioridad, bien
en fuerza o bien en desplazamiento durante un tiempo deseado.
Comando de perfil: Este comando permite inducir un comando personalizado al
actuador previamente diseñado mediante el “Editor de perfiles” que proporciona el
software FlexTest II.
28
El siguiente tipo de proceso que podemos utilizar es el de adquisición de datos, el
cual nos permitirá registrar todos los datos deseados en la forma que le
especifiquemos.
Adquisición Pico/Valle: Este tipo de adquisición nos permitirá registrar los valores
de todas las señales que queramos cada vez que se produzca un pico o un valle en
una señal determinada (señal maestra). En la pestaña “adquisición” indicamos esa
señal maestra. En la pestaña “señales” el resto de señales que queremos registrar.
Por último en “destino” podemos elegir el archivo en que guardar los datos. Si
tenemos más de un tipo de tipo de adquisición de datos es conveniente elegir
distintos destinos para cada tipo de adquisición.
Adquisición temporizada: Nos permitirá hacer un registro de datos cada x
segundos, para lo que deberemos indicarle la frecuencia de muestreo deseada.
Adquisición de Max/Min: Registra únicamente los datos para los que la señal
maestra alcanza su máximo y su mínimo.
Adquisición por cruce de nivel: Registra cada vez que la señal maestra alcanza un
nivel de forma escalonada (por ejemplo de 500 N en 500 N).
El siguiente tipo de proceso que tenemos en la paleta es el proceso tipo “eventos”,
con el cual podemos controlar el comportamiento del ensayo y dar la orden
correspondiente si nos interesa en un momento determinado.
Detector de límite de datos: Si superamos un límite determinado en la señal que
queramos se activa, son lo que podemos llamar a otro proceso.
Detector de entrada digital: Se activa si recibimos un cambio en alguna de las
señales digitales que estamos controlando.

29
Detector de cambio de Pico/Valle: Se activa si detecta un cambio considerable en
los picos y valles que registremos. Para ello deberemos indicarle la tolerancia y
sensibilidad a la hora de detectar dichos cambios.
Evento de operador: Para activarlo requiere de una acción externa por parte del
operador, como es pulsar el botón, para que pueda continuar con el ensayo.
Evento de fallo: Se activa si detecta que la señal difiere de lo esperado el tanto por
ciento que le indiquemos, de forma que podemos detectar por ejemplo el fallo de
una probeta.
Posteriormente tenemos los procesos de control externo, con los que podemos
controlar equipos externos al propio FlexTest IIm.
Para concluir en “otros” cabe destacar el proceso “grupo” con el que podemos
crear una subrutina en el programa del ensayo.

30
4. CALIBRACIÓN DE MEDIDORES EXTERNOS
En el guión realizado para el Constructor de Estación, se explica cómo hay que
conectar y añadir a nuestra estación de trabajo cualquier equipo de medida que no
hubiéramos instalado con anterioridad, como LVDTs o células de carga. Pero es
mediante el Manejador de Estación donde se realiza la calibración de estos
equipos. Así pues, dependiendo del tipo de equipo instalado y del recurso de
hardware utilizado habrá que realizar un tipo concreto de calibración.
Lo primero que debemos hacer para entrar en el menú de calibración es elegir en la
pestaña de “nivel de usuario” el nivel “Calibración”. Esta pestaña se encuentra en
la parte superior de la ventana del Manejador de Estación y por defecto aparece
marcado el nivel “Operador”. Para poder entrar en el nivel calibración y así
modificar los parámetros de calibración deberemos introducir la contraseña
“Calibration” con la primera letra en mayúsculas.
Una vez hecho esto pulsaremos el botón “configuración de la estación” que
se encuentra también en la barra de botones de la ventana del Manejador de
Estación. Nos aparecerá la siguiente ventana:
En esta ventana es donde se accede a la calibración de todos los componentes de
nuestra estación de trabajo, como pueden ser las servo válvulas, los LVDTs y
Células de Carga de los actuadores, además del resto de equipos de medida que
hayamos instalado.
31
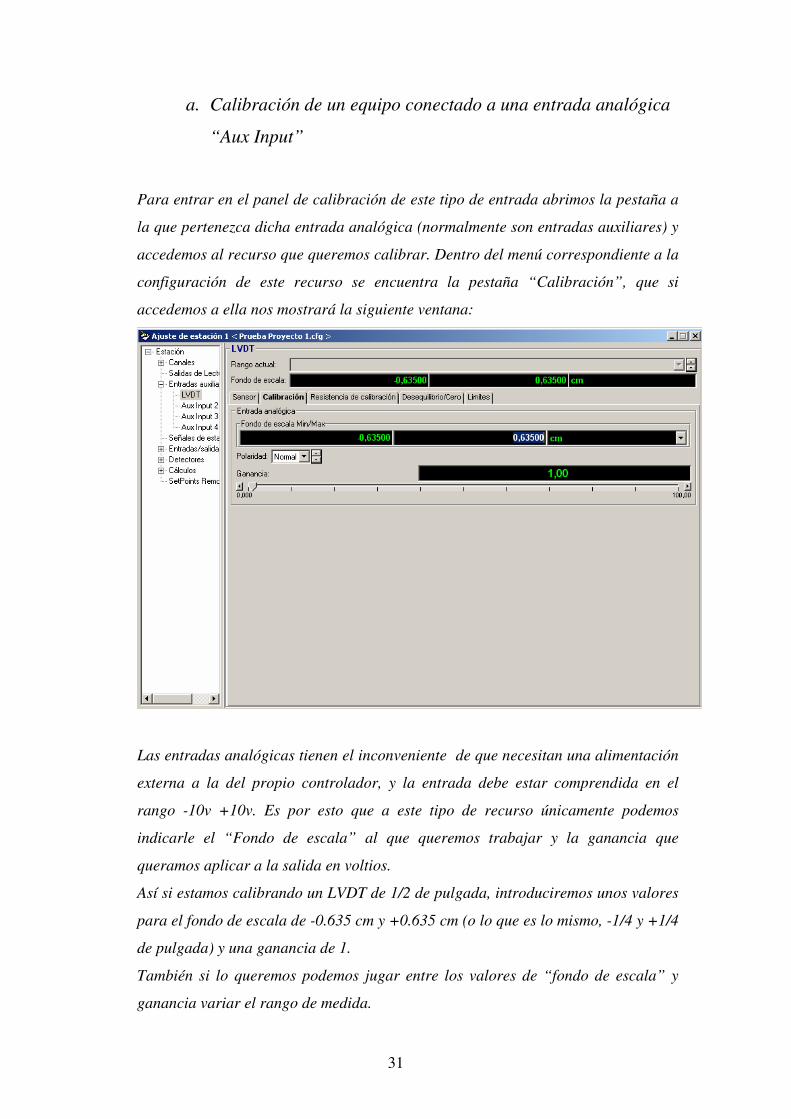
a. Calibración de un equipo conectado a una entrada analógica
“Aux Input”
Para entrar en el panel de calibración de este tipo de entrada abrimos la pestaña a
la que pertenezca dicha entrada analógica (normalmente son entradas auxiliares) y
accedemos al recurso que queremos calibrar. Dentro del menú correspondiente a la
configuración de este recurso se encuentra la pestaña “Calibración”, que si
accedemos a ella nos mostrará la siguiente ventana:
Las entradas analógicas tienen el inconveniente de que necesitan una alimentación
externa a la del propio controlador, y la entrada debe estar comprendida en el
rango -10v +10v. Es por esto que a este tipo de recurso únicamente podemos
indicarle el “Fondo de escala” al que queremos trabajar y la ganancia que
queramos aplicar a la salida en voltios.
Así si estamos calibrando un LVDT de 1/2 de pulgada, introduciremos unos valores
para el fondo de escala de -0.635 cm y +0.635 cm (o lo que es lo mismo, -1/4 y +1/4
de pulgada) y una ganancia de 1.
También si lo queremos podemos jugar entre los valores de “fondo de escala” y
ganancia variar el rango de medida.
32
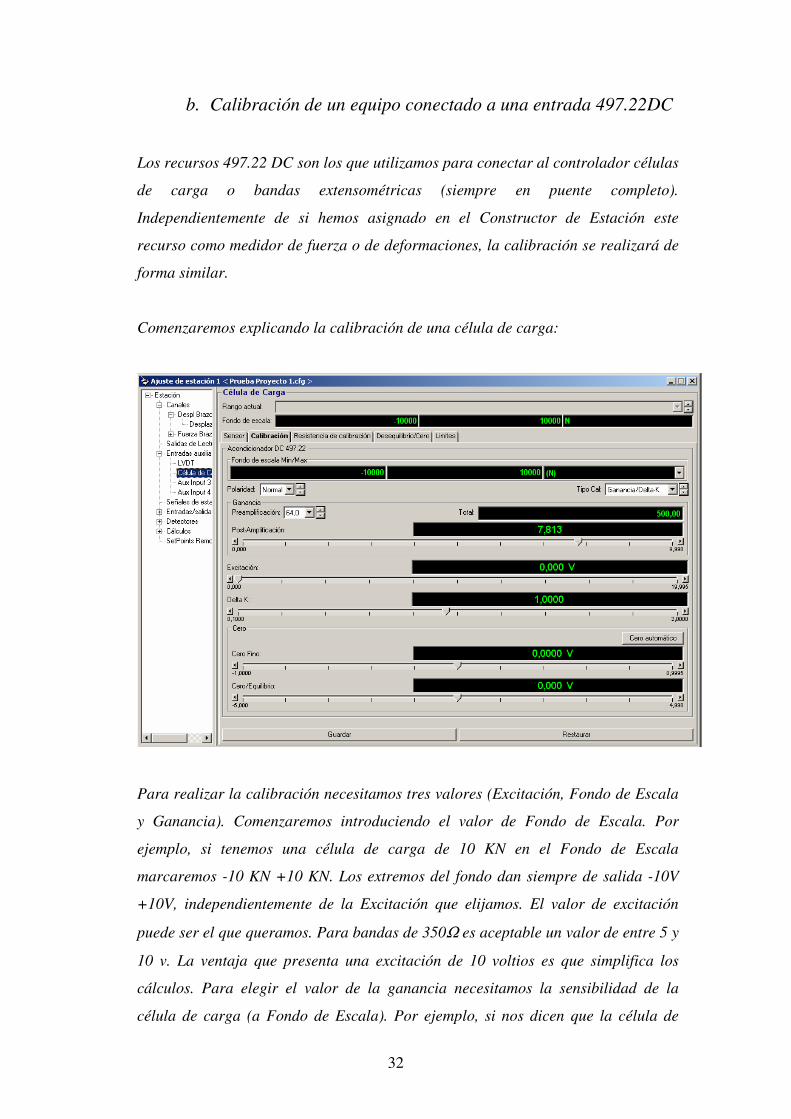
b. Calibración de un equipo conectado a una entrada 497.22DC
Los recursos 497.22 DC son los que utilizamos para conectar al controlador células
de carga o bandas extensométricas (siempre en puente completo).
Independientemente de si hemos asignado en el Constructor de Estación este
recurso como medidor de fuerza o de deformaciones, la calibración se realizará de
forma similar.
Comenzaremos explicando la calibración de una célula de carga:
Para realizar la calibración necesitamos tres valores (Excitación, Fondo de Escala
y Ganancia). Comenzaremos introduciendo el valor de Fondo de Escala. Por
ejemplo, si tenemos una célula de carga de 10 KN en el Fondo de Escala
marcaremos -10 KN +10 KN. Los extremos del fondo dan siempre de salida -10V
+10V, independientemente de la Excitación que elijamos. El valor de excitación
puede ser el que queramos. Para bandas de 350Ω es aceptable un valor de entre 5 y
10 v. La ventaja que presenta una excitación de 10 voltios es que simplifica los
cálculos. Para elegir el valor de la ganancia necesitamos la sensibilidad de la
célula de carga (a Fondo de Escala). Por ejemplo, si nos dicen que la célula de
33
carga de 10KN, al que le estamos aplicando una excitación de 10V tiene una
sensibilidad de 2mV/V, el valor de voltaje que estaremos midiendo en el Fondo de
Escala es de 2mV/V x 10V, es decir 20mV. La ganancia es el valor que multiplicado
por el voltaje en el Fondo de Escala nos da una salida de 10V (puesto que la salida
siempre es -10V +10V). Es decir:
mVGananciaV 2010 ⋅=
Lo que nos daría un valor para la ganancia de 500. Si en lugar de utilizar un valor
de Excitación de 10V utilizáramos uno de 5V el valor de la ganancia variaría de la
forma:
mVVVmV 105/2 =⋅ en el fondo de escala.
mVGananciaV 1010 ⋅=
Lo que daría un valor de ganancia igual 1000. Como podemos ver en la ventana de
calibración hay tres casillas que hacen referencia a la ganancia. El valor teórico
obtenido de esta forma se introduce en la casilla de “Ganancia Total”, y mediante
la postamplificación podemos ajustar poco a poco hasta conseguir una calibración
más fina si tuviéramos un equipo de calibración de células de carga.
Por último el valor “Delta K” hace referencia a que la pendiente de calibración a
compresión no es exactamente igual a la de tracción, y este valor sirve para
corregir dicha desviación. Normalmente es un valor muy próximo a 1.
Para el caso en que hayamos asignado el recurso 497.22 DC como un medidor de
deformaciones, la calibración se realiza, como ya hemos señalado, de forma
semejante. Para el valor de Fondo de Escala introducimos el valor máximo
esperado de deformación. Posteriormente asignamos el valor de Excitación que
consideremos apropiado, y mediante la sensibilidad dada por el fabricante,
calcularemos la ganancia.
Para terminar debemos mencionar que es probable que una vez realizada esta
calibración, exista un desequilibrio eléctrico de forma que aunque no haya ni carga
aplicada ni deformación el controlador estará devolviendo una medida que no se
34
corresponde con la realidad. Para eliminar el efecto de este desequilibrio tenemos
dos posibilidades:
a) Podemos introducir un desequilibrio mediante software en la medida que
nos devuelve el manejador de estación, llevando ésta a cero cuando no
haya carga aplicada o deformación observable. Podemos introducir este
desequilibrio como se explica en el apartado 2.3 Autodesequilibrado de
este manual o bien en la pestaña “Desequilibrio/Cero” que se encuentra
a la derecha de la pestaña de “Calibración” mediante el Desequilibrio
Automático o Manual.
b) Podemos introducir un desequilibrio eléctrico contrario al que presenta
el recurso que estamos calibrando en la misma pestaña
“Desequilibrio/Cero” mediante el Cero eléctrico Automático o Manual.
Para conservar estos parámetros de calibración es preciso una vez terminada la
calibración de los sistemas de medida salvar los parámetros de la estación
(archivo/guardar parámetros).
c. Configuración del equipo para leer aceleraciones
Para completar el estudio sobre los medidores externos que podemos utilizar con el
equipo de MTS se ha querido configurar el controlador a fin de que pudiéramos
utilizarlo para medir aceleraciones, si ese fuera el caso.
Para ello se ha utilizado un acelerómetro modelo 256HX-10-100 de Isotron y uno
de los módulos SCC-ACC01 del equipo de National Instruments, que se encuentran
disponibles en el laboratorio. Una vez alimentado el acelerómetro con el módulo,
llevamos la lectura del mismo a una de las cuatro entradas analógicas “Aux Input”
disponibles mediante un cable BNC.
35
La calibración del acelerómetro se realiza de forma similar a cualquier equipo
conectado a una entrada analógica. En la pestaña “Configuración” accedemos al
recurso analógico utilizado para medir aceleraciones y posteriormente pulsamos la
pestaña “Calibración”, donde deberemos decidir el fondo de escala y la ganancia,
que será distinto para cada acelerómetro. Como debemos hacer coincidir el fondo
de escala con +10V y -10V, si disponemos de un acelerómetro con una sensibilidad,
por ejemplo de 10 mV/m/s2, el fondo de escala a introducir en este caso debe ser de
1000 m/s2, mientras que la ganancia se mantendría igual a 1. Así si el acelerómetro
se excitase con 1000 m/s2, la salida sería justamente 10V. Otra opción sería utilizar
un fondo de escala de 100 m/s2, y una ganancia igual a 10, con lo que
conseguiríamos una mayor precisión en la medida.
Por último es importante resaltar que la medida del acelerómetro presenta un
desequilibrio eléctrico importante (en torno a 9.5 V) por lo que es siempre
necesario acudir al autodesequilibrado (apartado 2.3 de este manual) para llevar la
lectura a cero cuando el acelerómetro esté en reposo.

36
5. SINTONIZACIÓN (Tuning)
En ocasiones nos podemos encontrar con que los actuadores no responden al
comando de forma correcta (bien en el control por fuerza, bien en el control por
desplazamiento). En ese caso será necesario realizar una sintonización de los
mismos. Además los actuadores requieren distintas sintonizaciones para el modo de
control de fuerza si cambia la rigidez del espécimen que estemos ensayando. Sin
embargo el modo de control de desplazamiento se suele dejar siempre con los
mismos parámetros de sintonización.
Por último, en ocasiones (generalmente en el modo de control por fuerza) la
respuesta se vuelve inestable, oscilando su valor muy rápidamente entre valores
muy altos y muy bajos, lo que produce un ruido muy fuerte al golpear el actuador
sobre el espécimen, hasta que o salta uno de los límites impuestos, o cortamos la
hidráulica. Este es otro caso en el que deberíamos modificar la sintonización del
modo de control por fuerza.
Lo primero que debemos hacer para entrar en el menú de sintonización es elegir en
la pestaña de “nivel de usuario” el nivel “Sintonización”. Esta pestaña se
encuentra en la parte superior de la ventana del Manejador de Estación y por
defecto aparece marcado el nivel “Operador”. Para poder entrar en el nivel
sintonización y así modificar los parámetros de sintonización deberemos introducir
la contraseña “Tuning” con la primera letra en mayúsculas.
Una vez hecho esto pulsaremos el botón “configuración de la estación” que
se encuentra también en la barra de botones de la ventana del Manejador de
Estación. Nos aparecerá la siguiente ventana:

37
A continuación accederemos al canal (mediante la pestaña “Canales” que se
encuentra en la parte izquierda de la ventana) y posteriormente al modo de control
que queramos sintonizar. Para acceder a la ventana de sintonización pulsamos el
botón “Sintonización del canal” .
Para realizar una sintonización por fuerza o desplazamiento lo que haremos es
mediante el Generador de Funciones generar una onda cuadrada o senoidal de 0.5
Hz y poca amplitud. Posteriormente abrimos el osciloscopio y representamos tanto
el comando como la respuesta del modo de control que queramos sintonizar.
Comparando el comando (lo que queremos obtener) con la respuesta (lo que
estamos obteniendo) elegiremos los parámetros de ganancias adecuados.
Normalmente sólo se utilizan las ganancias Proporcional e Integral.

38
Ganancia Proporcional (P):
En la elección del valor de ganancia P óptimo deberemos tener en cuenta las
siguientes consideraciones:
• A medida que aumenta la ganancia proporcional, el error disminuye y la
señal de realimentación sigue a la señal de comando de una forma mucho
más cercana.
• Altas ganancias proporcionales aumentan la velocidad de la respuesta del
sistema.
• Una ganancia proporcional demasiado alta puede causar que el sistema se
vuelva inestable.
• Una ganancia proporcional demasiado baja puede causar que el sistema
sea demasiado perezoso.
Ganancia Integral (I):
En la elección del valor de ganancia I óptimo deberemos tener en cuenta las
siguientes consideraciones:
• La ganancia integral mejora el nivel medio durante operaciones dinámicas.
• Corrige la caída de la señal causada por las características del muelle de la
servo válvula.
• Minimiza el tiempo de recuperación del sistema en los transitorios.
• A mayor ganancia integral, mejor respuesta del sistema, aunque un valor
excesivo puede provocar un rizado lento.

39
Por último, si a pesar de haber modificado los valores de sintonización la respuesta
no es lo suficientemente adecuada, puede ser que la servo válvula esté un poco
sucia. Este problema se puede mitigar aumentando el valor del “Dither” de la
servo válvula. Para acceder a esta opción pulsamos el botón “Comando del Canal”
que se encuentra justo encima del botón de sintonización. Ahí podemos
aumentar poco a poco la amplitud de Dither hasta que escuchemos un silbido, que
no es recomendable sobrepasar.
Para conservar estos parámetros de sintonización es preciso una vez terminada la
sintonización de los modos de control salvar los parámetros de la estación
(archivo/guardar parámetros).
40
6. CONFIGURAR UNA SALIDA ANALÓGICA
En ocasiones podría interesarnos extraer alguna de las señales que estemos
manejando mediante el equipo de MTS para leerlas mediante también en otro
equipo independiente. Para ello tenemos las salidas de lectura o “analog outputs”.
Actualmente disponemos de cuatro salidas de lectura independientes configuradas
para no tener más que habilitarlas con la señal que deseemos. El procedimiento
para habilitar una salida de lectura es muy sencillo y lo podemos realizar desde el
propio nivel de usuario “operador”.
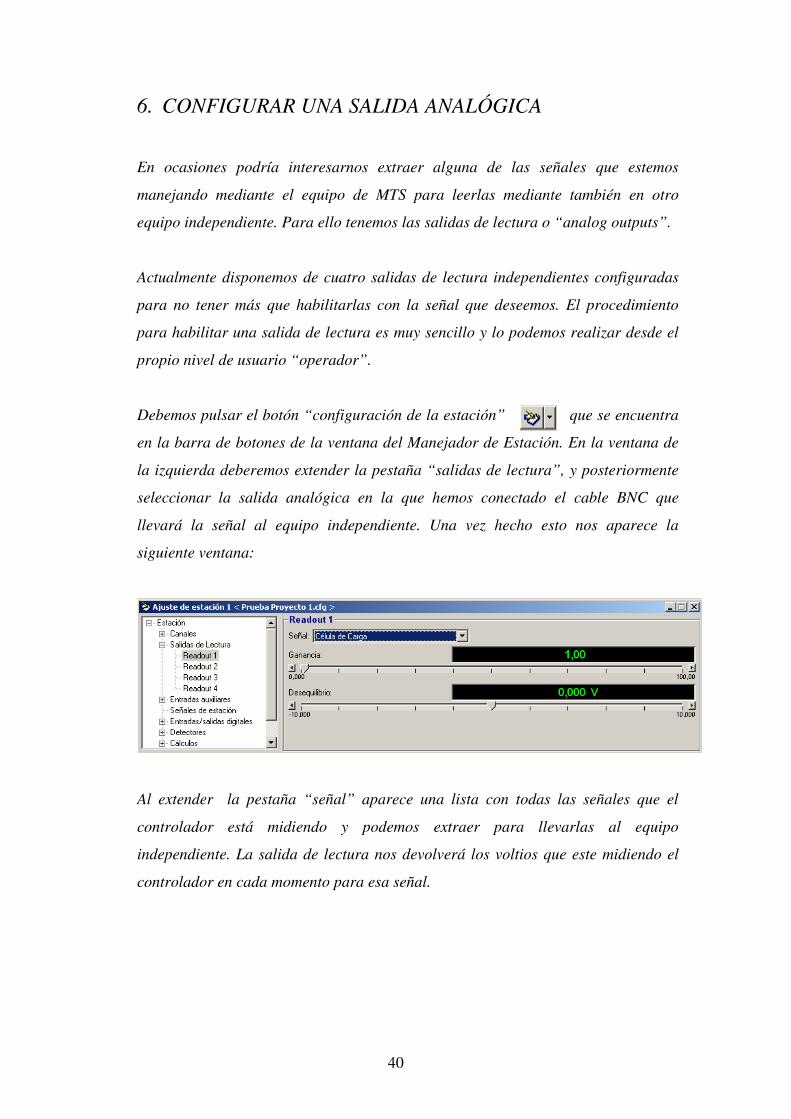
Debemos pulsar el botón “configuración de la estación” que se encuentra
en la barra de botones de la ventana del Manejador de Estación. En la ventana de
la izquierda deberemos extender la pestaña “salidas de lectura”, y posteriormente
seleccionar la salida analógica en la que hemos conectado el cable BNC que
llevará la señal al equipo independiente. Una vez hecho esto nos aparece la
siguiente ventana:
Al extender la pestaña “señal” aparece una lista con todas las señales que el
controlador está midiendo y podemos extraer para llevarlas al equipo
independiente. La salida de lectura nos devolverá los voltios que este midiendo el
controlador en cada momento para esa señal.
41
7. CERRAR EL PROGRAMA
Para cerrar el programa, al igual que para arrancarlo es muy importante seguir el
orden de los pasos a realizar.
1º Bajar el nivel de presión hidráulica a cero, mediante los botones que aparecen
en los controles de estación (HSM 1 o HSM 2).
2º Apagar el programa Manejador de estación. Siempre que lo apaguemos nos
preguntará si queremos salvar el juego de parámetros (configuración) de nuestra
estación.
3º Desactivar el grupo hidráulico girando la manivela de arriba abajo. Se apagará
la bombilla indicándonos que lo hemos desactivado.
4º Apagar el Controlador FlexTest IIm, que es la caja situada a la izquierda de la
mesa de trabajo. El controlador se apaga mediante un interruptor situado en la
esquina inferior izquierda de la caja.
Con esto terminamos la parte descriptiva referida al Controlador de MTS, por lo que a
continuación expondremos los resultados obtenidos de la puesta en práctica del
conocimiento adquirido sobre el manejo de estos programas.
42
P
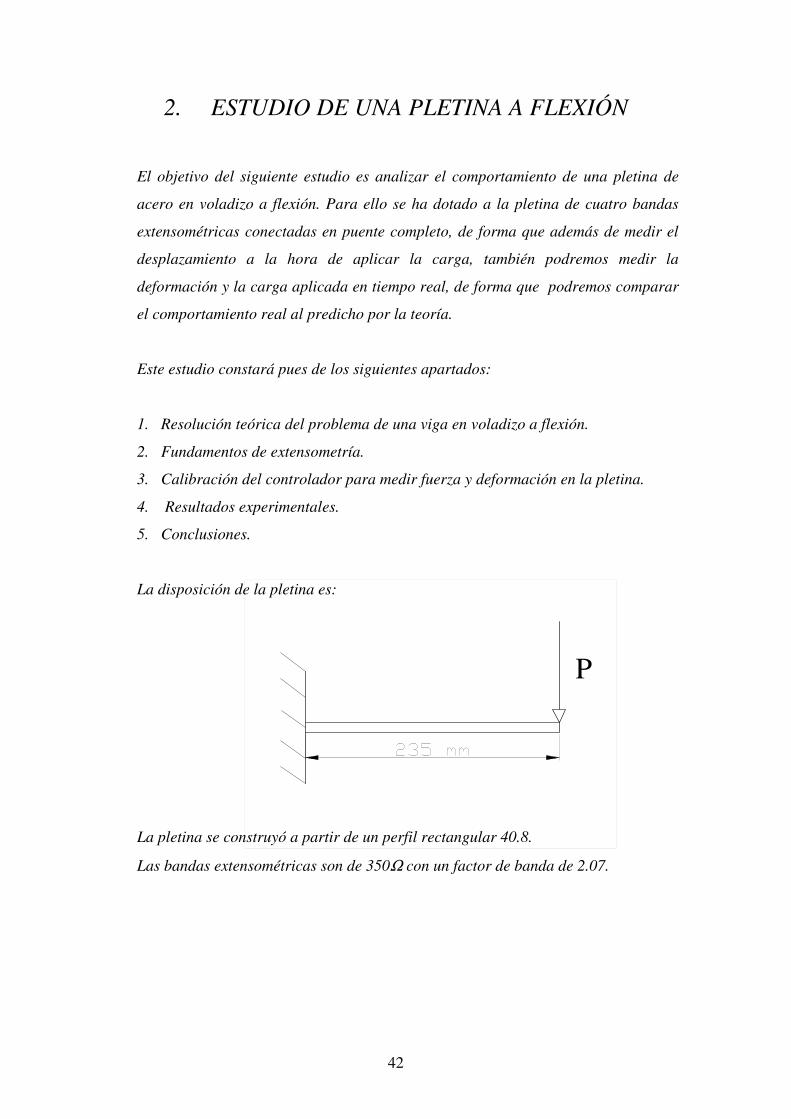
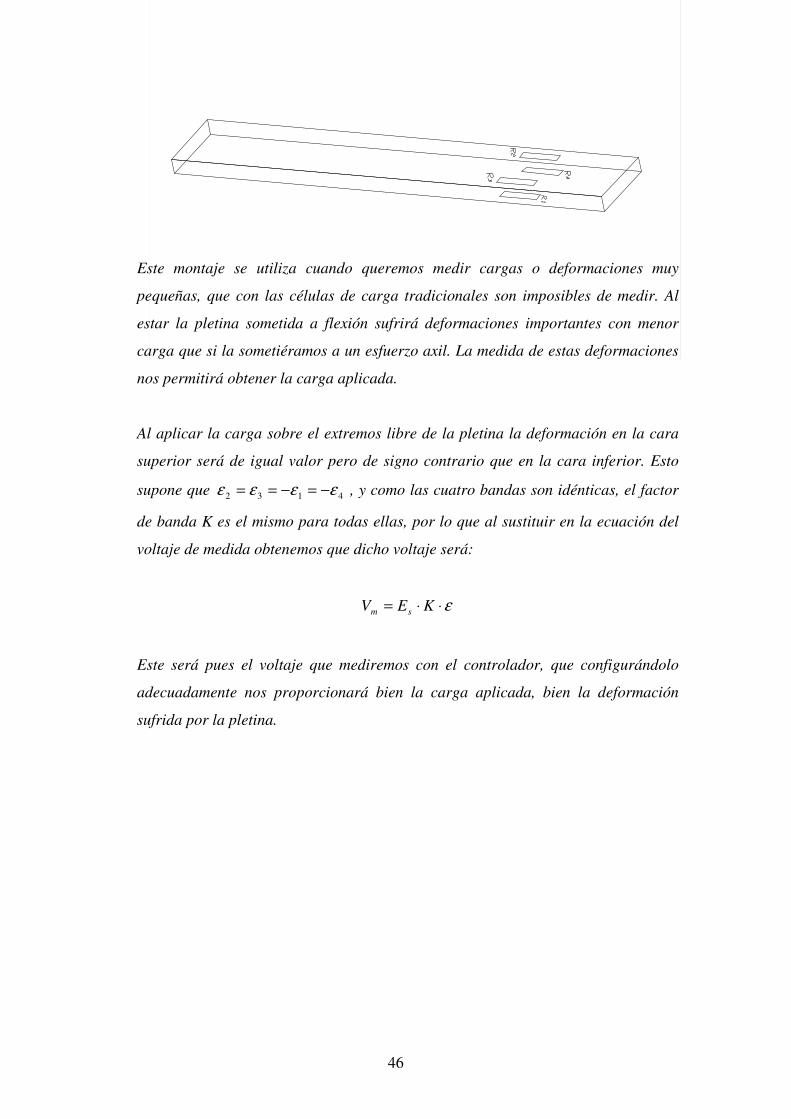
2. ESTUDIO DE UNA PLETINA A FLEXIÓN
El objetivo del siguiente estudio es analizar el comportamiento de una pletina de
acero en voladizo a flexión. Para ello se ha dotado a la pletina de cuatro bandas
extensométricas conectadas en puente completo, de forma que además de medir el
desplazamiento a la hora de aplicar la carga, también podremos medir la
deformación y la carga aplicada en tiempo real, de forma que podremos comparar
el comportamiento real al predicho por la teoría.
Este estudio constará pues de los siguientes apartados:
1. Resolución teórica del problema de una viga en voladizo a flexión.
2. Fundamentos de extensometría.
3. Calibración del controlador para medir fuerza y deformación en la pletina.
4. Resultados experimentales.
5. Conclusiones.
La disposición de la pletina es:
La pletina se construyó a partir de un perfil rectangular 40.8.
Las bandas extensométricas son de 350Ω con un factor de banda de 2.07.

43
1. Resolución Teórica
Lo primero que haremos será calcular las propiedades del perfil rectangular 40.8.
Para ello definimos las direcciones del perfil:
cmb 4=
cmh 8.0=
43
1706.012
cmhb
I x =⋅
= 34265.02
cmh
IW x
x =⋅
=
43
266.412
cmbh
I y =⋅
= 3133.22
cmb
IW y
y =⋅
=
La disposición de la pletina es tal que la dirección de flexión es la x.
Ahora vamos a calcular cuál es la máxima carga que le podemos aplicar antes de
que se alcance el límite elástico, para decidir posteriormente con qué carga realizar
el ensayo. Para ello calculamos la tensión equivalente a la que estará sometida la
pletina:
xxx W
LP
W
M ⋅==σ
A
P
A
V==τ
MPaxeq 2503 22 =+= τσσ
De aquí obtenemos que la carga máxima que soporta la pletina antes de llegar al
límite elástico es de 453.72 N, por lo que situaremos la carga límite en 450 N, que
nos servirá para elegir el fondo de escala en la calibración.

44
Para tener un amplio margen de seguridad vamos a realizar el ensayo con una
carga de 200 N.
Ya tenemos todos los datos para calcular la flecha máxima y la deformación teórica
que sufre la pletina.
Cálculo de la flecha máxima: Para una ménsula, la fórmula que nos permite
obtener el desplazamiento del punto de aplicación de la carga es:
mEI
PLf
x
00241.0101706.0101.23
200235.0
3 811
3
=⋅⋅⋅⋅
⋅==
−
Cálculo de la deformación máxima: Para calcular la deformación de la pletina en
el punto donde se encuentran ubicadas las bandas extensométricas, debemos
calcular primero la tensión a la que se ve sometida la pletina en dicho punto.
MPaW
M
xx 38.24
104265.0
052.02006
=⋅
⋅==
−σ MPa
A
V625.0
102.3
2004
=⋅
==−
τ
MPaxeq 40.243 22 =+= τσσ
Una vez obtenida la tensión la deformación se calcula directamente a partir del
módulo de Young.
00011619.0101.2
1040.2411
6
=⋅
⋅==
Ex
x
σε

45
2. Fundamentos de extensometría
Vamos a comenzar explicando el montaje de las bandas extensométricas en la
pletina. En extensometría normalmente se utiliza la conexión conocida como
“Puente de Wheatstone”.
Este montaje tiene la particularidad de que si hacemos que 4321 RRRR ===
conseguimos que el puente esté equilibrado, de forma que el voltaje medido (Vm)
sea nulo. En extensometría se sustituyen las resistencias por bandas
extensométricas. Cuando las bandas sufren una deformación, varían su resistividad.
Dado que la variación de resistividad es proporcional a la deformación en la
forma:
ε⋅=∆
KR
R
i
i
Se obtiene finalmente que el voltaje medido en el puente de Wheatstone cuando
existe deformación es:
)(24 44332211
44331122
εεεε
εεεε
KKKK
KKKKEV sm
+++⋅+
−+−=
El montaje que tenemos preparado en el laboratorio es un puente de Wheatstone
completo, por lo que se regirá por estas ecuaciones. La particularidad de nuestro
montaje radica en la disposición de las bandas sobre la pletina.
46
Este montaje se utiliza cuando queremos medir cargas o deformaciones muy
pequeñas, que con las células de carga tradicionales son imposibles de medir. Al
estar la pletina sometida a flexión sufrirá deformaciones importantes con menor
carga que si la sometiéramos a un esfuerzo axil. La medida de estas deformaciones
nos permitirá obtener la carga aplicada.
Al aplicar la carga sobre el extremos libre de la pletina la deformación en la cara
superior será de igual valor pero de signo contrario que en la cara inferior. Esto
supone que 4132 εεεε −=−== , y como las cuatro bandas son idénticas, el factor
de banda K es el mismo para todas ellas, por lo que al sustituir en la ecuación del
voltaje de medida obtenemos que dicho voltaje será:
ε⋅⋅= KEV sm
Este será pues el voltaje que mediremos con el controlador, que configurándolo
adecuadamente nos proporcionará bien la carga aplicada, bien la deformación
sufrida por la pletina.

47
3. Calibración de la pletina
Vamos a ver de forma exhaustiva cómo se ha realizado la calibración de la pletina
funcionando como célula de carga para posteriormente explicar, a partir de ésta
cómo se realizará en caso de que queramos medir deformaciones.
Para realizar la calibración, tanto de una célula de carga como de una banda
extensométrica, necesitamos especificar tres factores:
Fondo de Escala: Elegimos el valor del fondo de escala en función del máximo
valor de fuerza esperado. Como veremos más adelante con una carga de 450 N la
pletina llega a sufrir una tensión igual al límite elástico, por lo que 450 N será
nuestro valor del fondo de escala.
Voltaje de Excitación: Para unas bandas de 350Ω es usual utilizar valores
comprendidos entre 5 y 10 voltios. Utilizaremos en principio una excitación de 10V.
Ganancia: Para obtener el valor de la ganancia es necesario conocer la
sensibilidad a fondo de escala de la célula de carga (mV medidos por V de
excitación) o bien calcularla a partir de las ecuaciones de extensometría, como
hemos hecho en este caso.
De las ecuaciones de extensometría para este tipo de células de carga se obtiene un
valor de sensibilidad (en Voltios/Newtons) como:
2
6
hbE
EsxK
F
VmS
⋅⋅
⋅⋅⋅==

48
Factor de Banda: K = 2.07
Distancia del punto de aplicación de la carga a las bandas: x = 0.052 m
Voltaje de excitación: Es = 10V
Módulo de Young: E = 11101.2 ⋅ N/m2
Anchura de la pletina: b = 0.04 m
Espesor de la pletina: h = 0.008 m
Con estos valores obtenemos una sensibilidad de 51020134.1 −⋅ V/N. Esto es,
recibimos 0.0120134 mV por cada Newton aplicado. El valor del voltaje que nos
estará dando la célula de carga en el fondo de escala (cuando aplicamos 450 N)
saldrá de multiplicar la sensibilidad por el fondo de escala:
mVNNmVFESVm 4060.5450/0120134.0 =⋅=⋅=
Por último, debemos hacer coincidir la salida en el fondo de escala con 10V (es
decir, que cuando apliquemos 450 N obtengamos 10V), de donde obtenemos el
valor de la ganancia que tenemos que utilizar.
VGV 3104060.510 −⋅⋅=
Al despejar el valor de G obtenemos que la ganancia teórica para la calibración de
la célula de carga es de 1849.
Como veremos más adelante con este valor de ganancia estamos midiendo la fuerza
con un pequeño error aproximadamente de entre un 1 o un 2%. Por lo que
posteriormente a la calibración teórica podemos ajustar el valor de la ganancia
para minimizar en lo posible este error.
Por último, si en lugar de medir con el puente completo fuerza queremos medir
deformación, el desarrollo anterior es también válido.

49
Primero deberemos elegir el fondo de escala en el que queremos medir
deformaciones. En este caso se ha elegido como fondo de escala la deformación que
sufriría la pletina si aplicásemos la carga máxima de 450N.
0002612.0101.2
1
104265.0
052.0450116
=⋅
⋅⋅
⋅=
−
mNε
Según las ecuaciones de extensometría que hemos visto con anterioridad, para este
tipo de montaje el voltaje de salida del puente de Wheatstone es:
ε⋅⋅= KEV sm
Si mantenemos el valor de la excitación en 10V cuando estemos en el fondo de
escala (cuando la pletina sufra una deformación en la sección donde están las
bandas de 0.0002612) el voltaje de salida del puente completo será:
mVVm 40684.50002612.007.210 =⋅⋅=
Este voltaje es el que tenemos que hacer coincidir con el rango de 10V (es decir,
que cuando la deformación sea de 0.0002612 obtengamos 10V). De aquí es de
donde obtenemos el valor de la ganancia que tenemos que utilizar.
VGV 31040684.510 −⋅⋅=
Al despejar el valor de G obtenemos que la ganancia teórica para la calibración de
la célula de carga también es igual a 1849.
Al igual que en el caso anterior, este valor de la ganancia también presenta un
error en la medida de la deformación en torno al 1-2% por lo que también es
aconsejable ajustar el valor de la ganancia para minimizar este error.
50
4. Resultados experimentales
Vamos a comparar los resultados obtenidos experimentalmente respecto a la flecha
máxima, la carga medida con la pletina funcionando como célula de carga y la
deformación medida con la pletina funcionando como banda extensométrica.
4.1 Flecha Medida
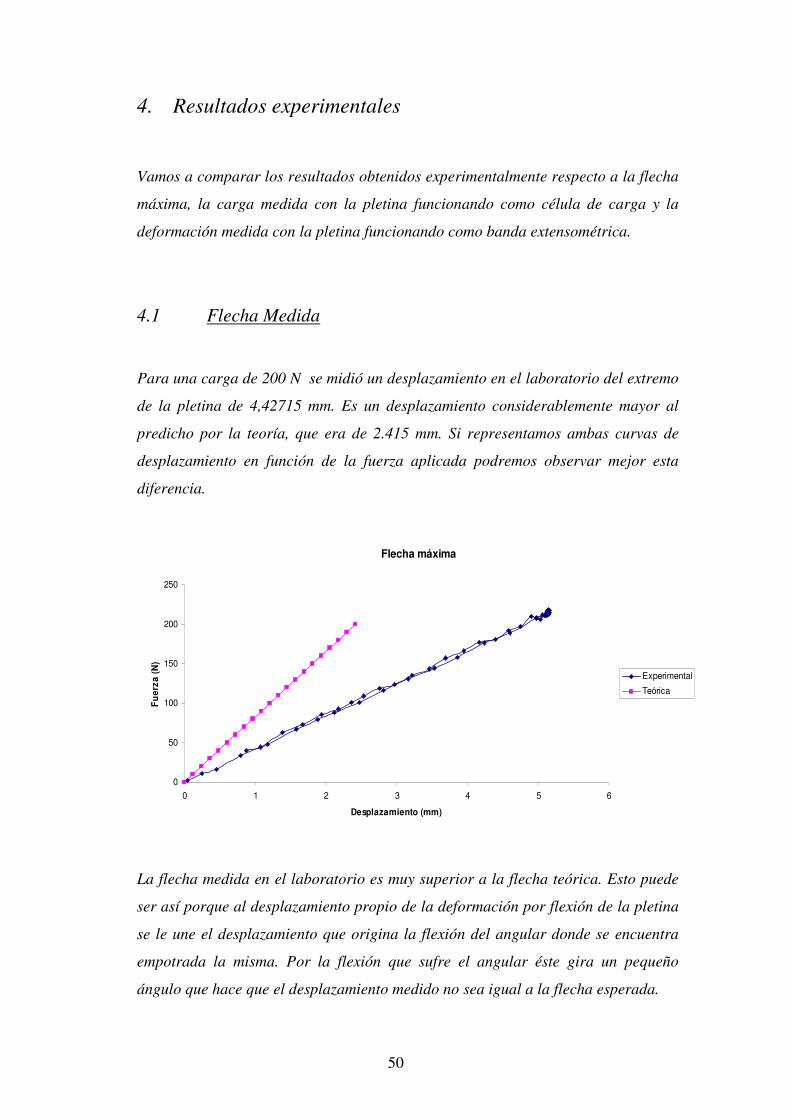
Para una carga de 200 N se midió un desplazamiento en el laboratorio del extremo
de la pletina de 4,42715 mm. Es un desplazamiento considerablemente mayor al
predicho por la teoría, que era de 2.415 mm. Si representamos ambas curvas de
desplazamiento en función de la fuerza aplicada podremos observar mejor esta
diferencia.
Flecha máxima
0
50
100
150
200
250
0 1 2 3 4 5 6
Desplazamiento (mm)
Fu
erz
a (
N)
Experimental
Teórica
La flecha medida en el laboratorio es muy superior a la flecha teórica. Esto puede
ser así porque al desplazamiento propio de la deformación por flexión de la pletina
se le une el desplazamiento que origina la flexión del angular donde se encuentra
empotrada la misma. Por la flexión que sufre el angular éste gira un pequeño
ángulo que hace que el desplazamiento medido no sea igual a la flecha esperada.

51
4.2 Carga medida
Para estudiar el comportamiento de la pletina funcionando como una célula de
carga analizaremos los resultados obtenidos a partir de la calibración realizada
directamente mediante las ecuaciones de extensometría.
Con una ganancia G = 1849, y a una carga aplicada de 215.52 N, la pletina midió
una fuerza de 216.60 N, lo que supone un error de un 0.5%. La representación
gráfica de ambas fuerzas es:
Carga aplicada vs Carga medida con pletina
0
50
100
150
200
250
25 26 27 28 29 30 31 32
Desplazamiento (mm)
Fu
erz
a (
N)
Carga aplicada
Carga medida
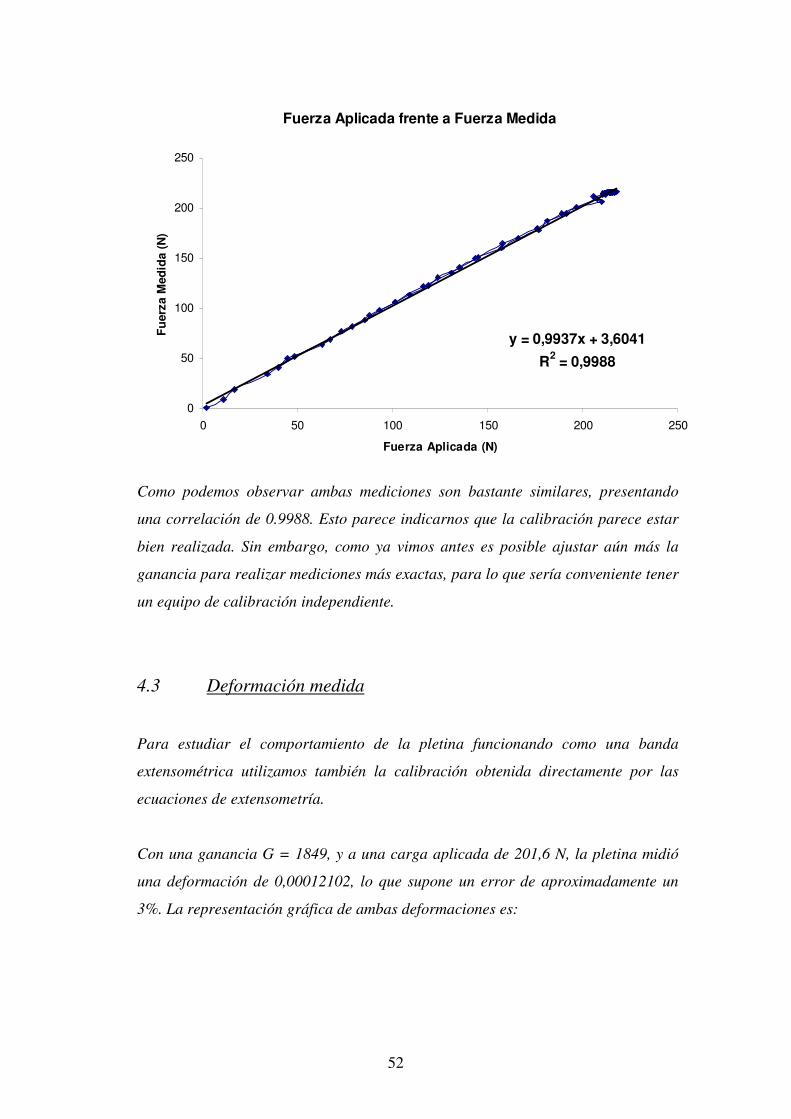
Para comprobar mejor cómo de buena es la medición de la fuerza vamos a obtener
la correlación entre la fuerza aplicada y la fuerza medida.
52
Fuerza Aplicada frente a Fuerza Medida
y = 0,9937x + 3,6041
R2 = 0,9988
0
50
100
150
200
250
0 50 100 150 200 250
Fuerza Aplicada (N)
Fu
erz
a M
ed
ida (
N)
Como podemos observar ambas mediciones son bastante similares, presentando
una correlación de 0.9988. Esto parece indicarnos que la calibración parece estar
bien realizada. Sin embargo, como ya vimos antes es posible ajustar aún más la
ganancia para realizar mediciones más exactas, para lo que sería conveniente tener
un equipo de calibración independiente.
4.3 Deformación medida
Para estudiar el comportamiento de la pletina funcionando como una banda
extensométrica utilizamos también la calibración obtenida directamente por las
ecuaciones de extensometría.
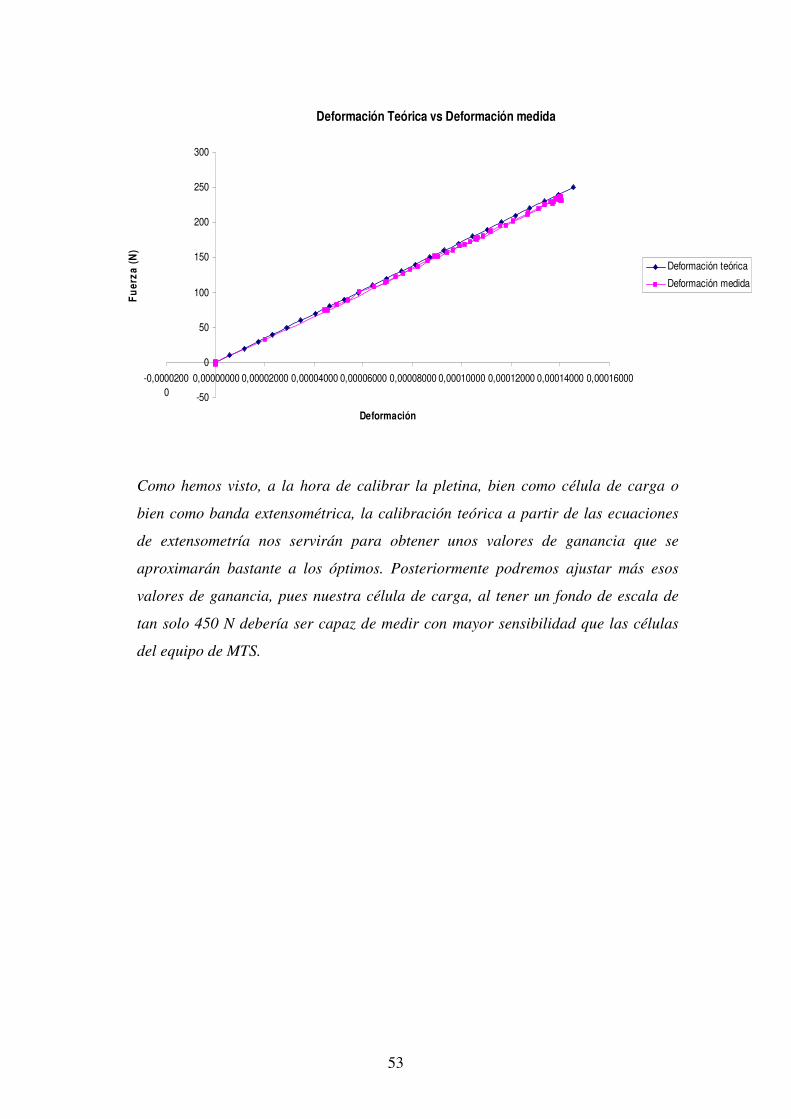
Con una ganancia G = 1849, y a una carga aplicada de 201,6 N, la pletina midió
una deformación de 0,00012102, lo que supone un error de aproximadamente un
3%. La representación gráfica de ambas deformaciones es:
53
Deformación Teórica vs Deformación medida
-50
0
50
100
150
200
250
300
-0,0000200
0
0,00000000 0,00002000 0,00004000 0,00006000 0,00008000 0,00010000 0,00012000 0,00014000 0,00016000
Deformación
Fu
erz
a (
N)
Deformación teórica
Deformación medida
Como hemos visto, a la hora de calibrar la pletina, bien como célula de carga o
bien como banda extensométrica, la calibración teórica a partir de las ecuaciones
de extensometría nos servirán para obtener unos valores de ganancia que se
aproximarán bastante a los óptimos. Posteriormente podremos ajustar más esos
valores de ganancia, pues nuestra célula de carga, al tener un fondo de escala de
tan solo 450 N debería ser capaz de medir con mayor sensibilidad que las células
del equipo de MTS.
54
5. Conclusiones
A modo de resumen vamos a enumerar algunas de las conclusiones que hemos
podido extraer al realizar este estudio:
1º La flecha máxima medida en el extremo de la pletina no se corresponde con la
flecha esperada. Aparentemente el método de sujeción del extremo descargado no
se corresponde con un empotramiento perfecto, y esto hace que la flecha medida
sea mayor.
2º La calibración teórica del controlador para utilizar la pletina como una célula
de carga para fuerzas pequeñas da unos resultados bastante aceptables al
compararlos con los de la célula de carga del equipo de MTS. Lo mismo ocurre con
la calibración teórica de la pletina para medir deformaciones.
3º Ya que el montaje del puente de Wheatstone en la pletina es muy apropiado
para medir pequeñas cargas, sería interesante mediante un equipo de calibración
independiente realizar una calibración más fina de la misma modificando el valor
de la ganancia, pues la sensibilidad de esta célula de carga es mayor que las de las
células de carga del equipo de MTS.
55
3. CALIBRACIÓN TEÓRICA DE UNA CÉLULA DE
CARGA TIPO BARRA PARA EL EQUIPO DE MTS
En el siguiente estudio vamos a explicar cómo hemos realizado la calibración
teórica de una célula de carga construida en el laboratorio del departamento para
poder utilizarla con el equipo de MTS. Posteriormente compararemos los
resultados obtenidos con los que me proporciona una de las células de carga de
MTS para ver cuánto se ajustan las ecuaciones de extensometría con la realidad.
Este estudio constará pues de los siguientes apartados:
6. Fundamentos de extensometría.
7. Calibración del controlador para medir la carga aplicada.
8. Resultados experimentales.
9. Conclusiones.

56
1. Fundamentos de Extensometría
Anteriormente ya hemos visto la utilidad de la configuración del puente de
Wheatstone a la hora de medir fuerzas y deformaciones mediante bandas
extensométricas.
Al igual que la célula de carga de la pletina a flexión, ésta presenta el puente de
Wheatstone completo con cuatro bandas extensométricas de idénticas
características. La diferencia fundamental entre la célula de carga que vamos a
estudiar en este apartado y la célula de carga de la pletina a flexión estudiada
anteriormente radica en la disposición de las bandas en las mismas. Mientras que
en la pletina a flexión se colocaban de tal forma que todas sufrían la misma
deformación, en este caso se sitúan dos bandas en la dirección de la carga aplicada
y otras dos en dirección transversal. De esta forma podremos tener en cuenta tanto
la deformación axial como el efecto Poisson.
Esta disposición es muy apropiada para medir grandes fuerzas, al contrario que
ocurría para la célula de carga de la pletina, más orientada a medir cargas
pequeñas.
La disposición de las bandas en el cilindro debe ser como sigue: las bandas 2 y 3
estarán siguiendo la dirección axial mientras que las bandas 1 y 4 se colocan en
dirección radial. De esta forma al aplicar la carga las bandas 2 y 3 estarán
sometidas a una deformación ε, mientras que las bandas 1 y 4 sufrirán una
deformación νε.
Así pues, si retomamos la expresión que nos da el voltaje medido a la salida del
puente de Wheatstone
)(24 44332211
44331122
εεεε
εεεε
KKKK
KKKKEV sm
+++⋅+
−+−=

57
y sustituimos los valores de las deformaciones para cada una de las bandas
obtendremos que el voltaje medido en la salida del puente de Wheatstone será:
ευ
ευ
)1(44
)1(2
−+
+=
K
KEV sm
Este será pues el voltaje que mediremos con el controlador, que configurándolo
adecuadamente nos proporcionará la fuerza que estamos aplicando a la célula de
carga.

58
2. Calibración teórica de la célula de carga
A continuación vamos a ver detalladamente cómo se realiza la calibración de la
célula de carga a partir de las ecuaciones de extensometría. Para ello, al igual que
en el caso anterior necesitaremos especificar tres factores:
Fondo de Escala: Elegimos el valor del fondo de escala en función del máximo
valor de fuerza esperado. Puesto que los actuadores de que disponemos en el
laboratorio son de 10KN, éste será nuestro fondo de escala.
Voltaje de Excitación: Para unas bandas de 350Ω es usual utilizar valores
comprendidos entre 5 y 10 voltios. Utilizaremos una excitación de 10V.
Ganancia: Para obtener el valor de la ganancia es necesario conocer la
sensibilidad a fondo de escala de la célula de carga (mV medidos por V de
excitación) o bien calcularla a partir de las ecuaciones de extensometría, como
haremos en este caso.
De las ecuaciones de extensometría para este tipo de células de carga se obtiene un
valor de sensibilidad (en Voltios/Newtons) como:
AE
EK
F
VmS s
2
)1( υ+==
Factor de Banda: K = 2.07
Módulo de Poisson: ν = 0.3
Voltaje de excitación: Es = 10V
Módulo de Young: E = 11101.2 ⋅ N/m2
Área de la sección: A = 4101416.3 −⋅ m2
Con estos valores obtenemos una sensibilidad de 7100394.2 −⋅ V/N. Esto es,
recibimos 0.00020394 mV por cada Newton aplicado. El valor del voltaje que nos

59
estará dando la célula de carga en el fondo de escala (cuando aplicamos 10000 N)
saldrá de multiplicar la sensibilidad por el fondo de escala:
mVNNmVFESVm 0394.210000/00020394.0 =⋅=⋅=
Por último, debemos hacer coincidir la salida en el fondo de escala con 10V (es
decir, que cuando apliquemos 10000 N obtengamos 10V), de donde obtenemos el
valor de la ganancia que tendremos que utilizar.
VGV 3100394.210 −⋅⋅=
Al despejar el valor de G obtenemos que la ganancia teórica para la calibración de
la célula de carga es de 4903.

60
3. Resultados experimentales
Para comprobar el funcionamiento de la célula de carga objeto de estudio se
realizó un ensayo de carga estático sobre el pórtico que tenemos en el laboratorio
del departamento de 3000 N.
Así, para una fuerza de 3004,1658 N medida por el equipo de MTS, la célula de
carga midió a su vez 3031,251 N. Esto significa que la célula de carga que estamos
probando, con la calibración teórica presenta un error de aproximadamente un
0.9%, por lo que en este caso las ecuaciones de extensometría nos proporcionan un
valor de la ganancia bastante próximo al óptimo.
Para poder apreciar mejor el buen comportamiento de nuestra célula de carga,
vamos a representar la evolución de la medida obtenida con ella frente a la
obtenida mediante el equipo de MTS.
Fuerza Aplicada frente a Fuerza Medida
y = 1,0124x - 19,195
R2 = 0,9995
0
500
1000
1500
2000
2500
3000
3500
0 500 1000 1500 2000 2500 3000 3500
Fuerza Aplicada (N)
Fu
erz
a M
ed
ida (
N)
Como podemos ver, la relación entre ambas medidas es muy buena, siendo la
regresión entre ambas de 0.9995, por lo que es mejor incluso del que obtuvimos
para la célula de carga tipo pletina en el apartado anterior.
61
4. Conclusiones
A la vista de los resultados obtenidos podemos concluir que la calibración teórica
de este tipo de células de carga proporciona unos resultados bastante aceptables,
por lo que las ecuaciones de extensometría nos serán de una gran utilidad en el
caso en que no podamos recurrir a una calibración regular. Aún así es más
aconsejable realizar una calibración externa mediante algún equipo independiente
con el fin de ajustar lo más posible la ganancia a su valor óptimo.

62
a
4. ESTUDIO DE UNA MÉNSULA EN VIBRACIÓN
LIBRE
El siguiente estudio se ha realizado como una aplicación práctica para comprobar
la lectura de aceleraciones mediante el Controlador FlexTest IIm. El ensayo
consiste en lo siguiente:
A la pletina en voladizo ya estudiada con anterioridad le hemos añadido un
acelerómetro en su extremo libre. Mediante uno de los actuadores del equipo de
MTS aplicamos una carga de 45 N para, posteriormente, descargar mediante un
escalón. Esto hace que la pletina se mantenga en vibración libre durante algunos
segundos, en los que realizamos la medición de las aceleraciones del punto en que
hemos colocado el acelerómetro.
A partir de los valores de las aceleraciones registradas obtendremos el valor de la
frecuencia natural de vibración para esta ménsula, y este valor lo compararemos
con el obtenido mediante el estudio del transitorio de un modelo realizado en
ANSYS y con el que nos proporciona una fórmula teórica obtenida de un
prontuario.

63
1. Resolución teórica
La resolución teórica de la frecuencia natural de vibración del primer modo de una
viga en voladizo se puede obtener de forma inmediata a partir de la siguiente
fórmula:
41 52.3Lm
IE
⋅
⋅=ω
donde:
E es el módulo de elasticidad del acero. 211 /101.2 mNE ⋅= .
I es el momento de inercia de la ménsula. 481023268.0 mI −⋅= .
m es la masa lineal de la ménsula. mKgm /512.2= .
L es la longitud total de la ménsula. L = 0.33 m .
La estimación de la inercia utilizada para el cálculo ha sido una media ponderada
entre las inercias de los dos tipos de perfiles.
381023268.0 cmL
LILII
total
pletinapletinaangularangular −⋅=⋅+⋅
=
siendo: 48104266.0 mI angular−⋅= 48101706.0 mI pletina
−⋅=
Con estos valores se obtiene que la frecuencia natural de vibración para el primer
modo es srad /98.450=ω , o lo que es lo mismo, f = 71.77 Hz.
64
2. Resolución mediante un modelo en ANSYS
Es posible realizar un cálculo de la frecuencia natural de vibración de una
estructura en ANSYS a partir de la solución transitoria de un modelo del sistema
que estamos estudiando.
En este caso se ha intentado reproducido la situación real mediante la pletina y el
angular empotrado utilizando para ello elementos BEAM3 con las características
geométricas de ambos elementos. Además, para asemejar más el modelo a la
realidad se ha incluido un coeficiente de amortiguamiento intrínseco para el Acero
de 0.003%.
La solución del transitorio que nos proporciona ANSYS nos permite simular la
vibración que sufre la ménsula al ser descargada mediante un escalón y registrar
las aceleraciones verticales de cualquier punto de la misma en el intervalo temporal
que queramos.
Después de varias pruebas se eligió para este estudio una frecuencia de 1000 Hz
con la que obtenemos una solución que convergerá con la obtenida en la solución
modal, siendo la solución transitoria de la aceleración vertical del punto donde se
encuentra situado el acelerómetro es:

65
Podemos observar en el gráfico que las aceleraciones máximas se situarán en torno
a 175 m/s2 para ir amortiguándose rápidamente. Para 1.5 segundos la aceleración
es prácticamente nula.
Para obtener la frecuencia natural de vibración de la ménsula a partir de la
respuesta temporal es necesario trasladar este resultado al dominio de la
frecuencia. Esto se puede realizar utilizando una herramienta de MATLAB de
procesamiento de señales llamada “SPTOOL”. La representación gráfica de la
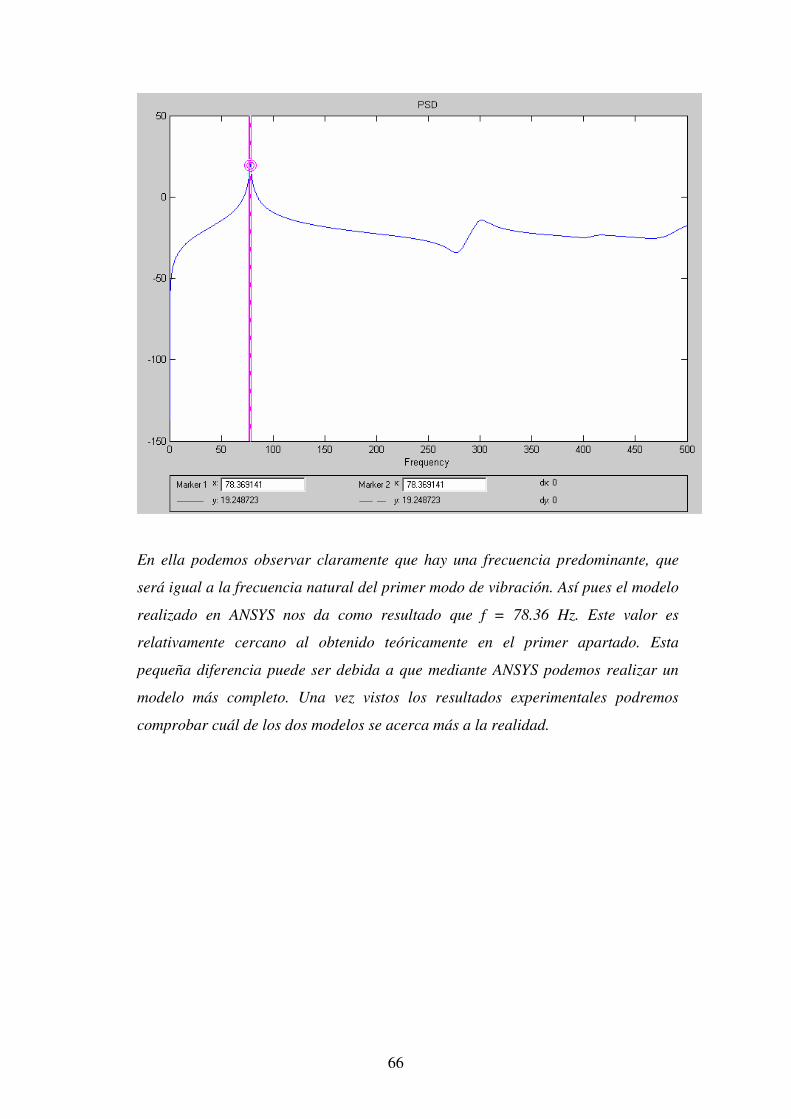
Transformada de Fourier de la anterior curva será:
66
En ella podemos observar claramente que hay una frecuencia predominante, que
será igual a la frecuencia natural del primer modo de vibración. Así pues el modelo
realizado en ANSYS nos da como resultado que f = 78.36 Hz. Este valor es
relativamente cercano al obtenido teóricamente en el primer apartado. Esta
pequeña diferencia puede ser debida a que mediante ANSYS podemos realizar un
modelo más completo. Una vez vistos los resultados experimentales podremos
comprobar cuál de los dos modelos se acerca más a la realidad.
67
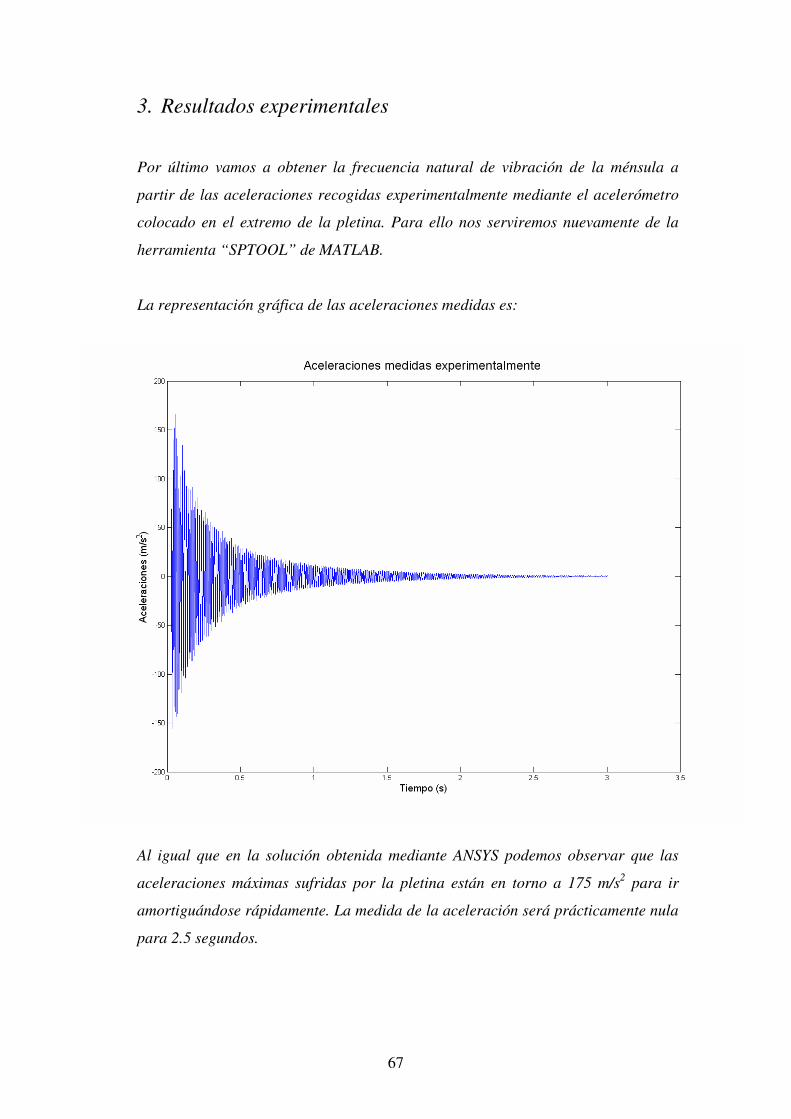
3. Resultados experimentales
Por último vamos a obtener la frecuencia natural de vibración de la ménsula a
partir de las aceleraciones recogidas experimentalmente mediante el acelerómetro
colocado en el extremo de la pletina. Para ello nos serviremos nuevamente de la
herramienta “SPTOOL” de MATLAB.
La representación gráfica de las aceleraciones medidas es:
Al igual que en la solución obtenida mediante ANSYS podemos observar que las
aceleraciones máximas sufridas por la pletina están en torno a 175 m/s2 para ir
amortiguándose rápidamente. La medida de la aceleración será prácticamente nula
para 2.5 segundos.
68
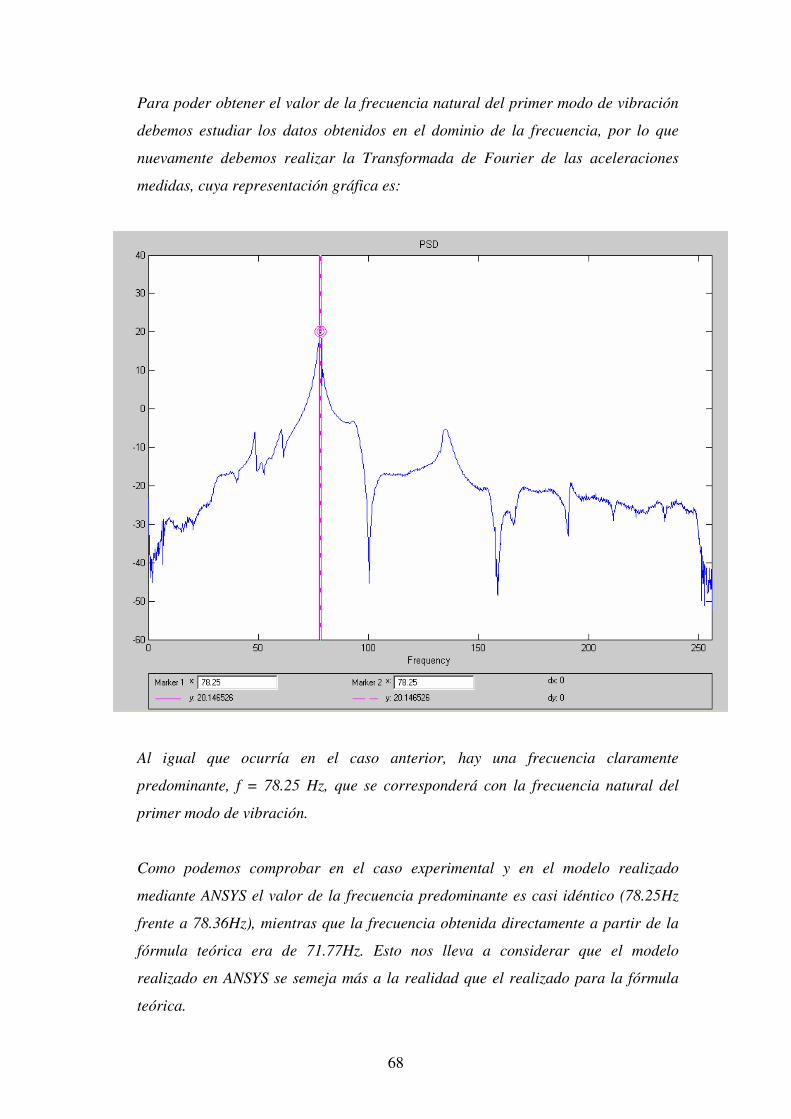
Para poder obtener el valor de la frecuencia natural del primer modo de vibración
debemos estudiar los datos obtenidos en el dominio de la frecuencia, por lo que
nuevamente debemos realizar la Transformada de Fourier de las aceleraciones
medidas, cuya representación gráfica es:
Al igual que ocurría en el caso anterior, hay una frecuencia claramente
predominante, f = 78.25 Hz, que se corresponderá con la frecuencia natural del
primer modo de vibración.
Como podemos comprobar en el caso experimental y en el modelo realizado
mediante ANSYS el valor de la frecuencia predominante es casi idéntico (78.25Hz
frente a 78.36Hz), mientras que la frecuencia obtenida directamente a partir de la
fórmula teórica era de 71.77Hz. Esto nos lleva a considerar que el modelo
realizado en ANSYS se semeja más a la realidad que el realizado para la fórmula
teórica.
69
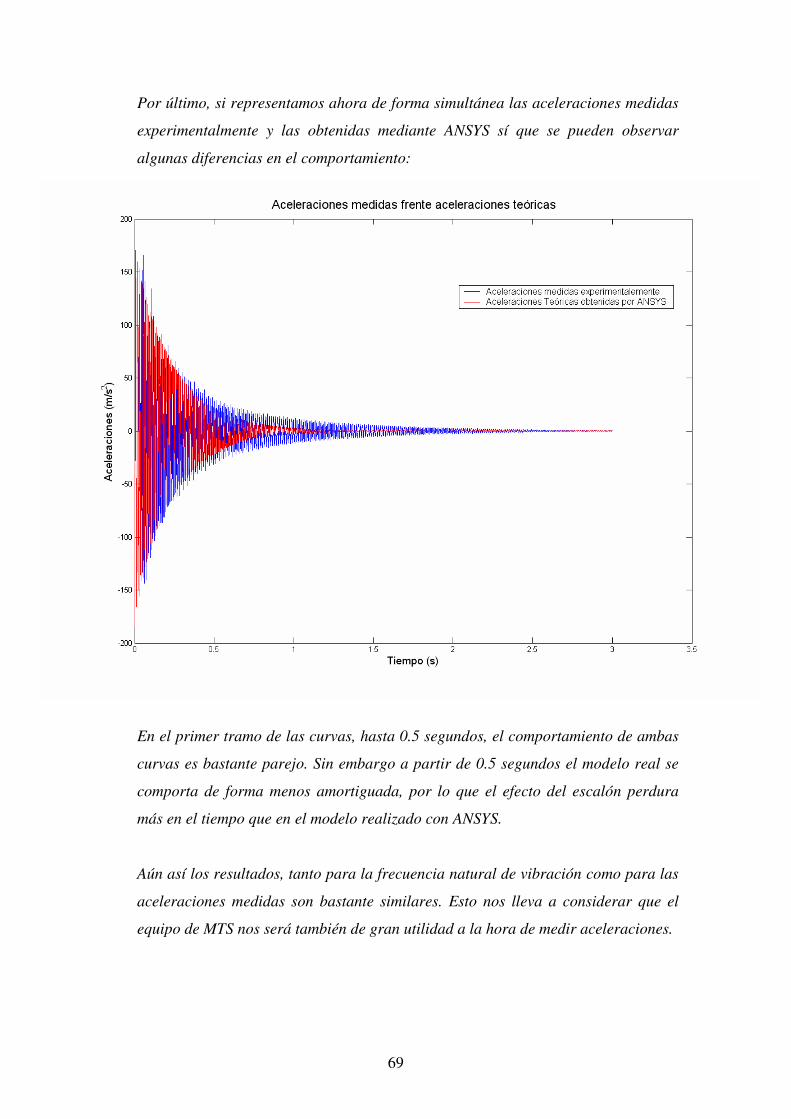
Por último, si representamos ahora de forma simultánea las aceleraciones medidas
experimentalmente y las obtenidas mediante ANSYS sí que se pueden observar
algunas diferencias en el comportamiento:
En el primer tramo de las curvas, hasta 0.5 segundos, el comportamiento de ambas
curvas es bastante parejo. Sin embargo a partir de 0.5 segundos el modelo real se
comporta de forma menos amortiguada, por lo que el efecto del escalón perdura
más en el tiempo que en el modelo realizado con ANSYS.
Aún así los resultados, tanto para la frecuencia natural de vibración como para las
aceleraciones medidas son bastante similares. Esto nos lleva a considerar que el
equipo de MTS nos será también de gran utilidad a la hora de medir aceleraciones.

70
4. Conclusiones
Con este último estudio concluye la sección dedicada a las aplicaciones prácticas
en el uso del Controlador FlexTest IIm. De los resultados obtenidos en todas ellas
podemos concluir que la capacidad del equipo de MTS a la hora de realizar
adquisiciones de datos de diferentes magnitudes físicas puede ser de gran utilidad.
Al utilizar el Controlador FlexTest IIm no sólo nos ahorramos tener que utilizar
diferentes equipos de adquisición de datos según sea el tipo de ensayo a realizar,
sino que además evitaremos el problema de sincronización que se puede producir
cuando se trabaja con varios equipos en paralelo.
71
5. ANÁLISIS EXPERIMENTAL DE UN PÓRTICO DE
NUDOS ARTICULADOS Y RÍGIDOS
INTRODUCCIÓN
El objetivo del siguiente estudio consiste en realizar un ensayo estático de carga sobre
una estructura situada en el laboratorio del departamento y analizar su
comportamiento. La estructura se ha construido de forma que realizando pequeñas
modificaciones en las uniones podremos simular bien una estructura de nudos
articulados, bien una estructura de nudos rígidos, por lo que vamos a analizar las
diferencias de comportamiento reales entre cada una de los modelos construidos y a su
vez con respecto a la solución al problema que nos aportará la Teoría de Estructuras.
Así pues el contenido de este estudio se puede resumir como sigue:
1. Estudio de una estructura de nudos articulados.
a) Resultados experimentales, teóricos y diferencias apreciables.
b) Variaciones constructivas sobre la estructura original.
c) Conclusiones.
2. Estudio de una estructura de nudos rígidos.
a) Resultados experimentales, teóricos y diferencias apreciables.
b) Variaciones constructivas sobre la estructura original.
c) Conclusiones.
3. Diferencias de comportamiento entre ambos tipos constructivos.
a) Diferencias teóricas y experimentales.
b) Posibles causas de estas diferencias.
c) Conclusiones.

72
1. ESTRUCTURA DE NUDOS ARTICULADOS
En este apartado se expone el estudio realizado para la estructura de nudos
articulados, comenzando por la solución constructiva para simular el comportamiento
deseado.
La estructura objeto de estudio es la siguiente:
DATOS:
Pilares y viga perfil HEB100 de Acero Largueros perfil L40 de Acero
211 /101.2 mNE ⋅= 211 /101.2 mNE ⋅=
241026 mA −⋅= 241008.3 mA −⋅=
4810450 mI −⋅= 481047.4 mI −⋅=
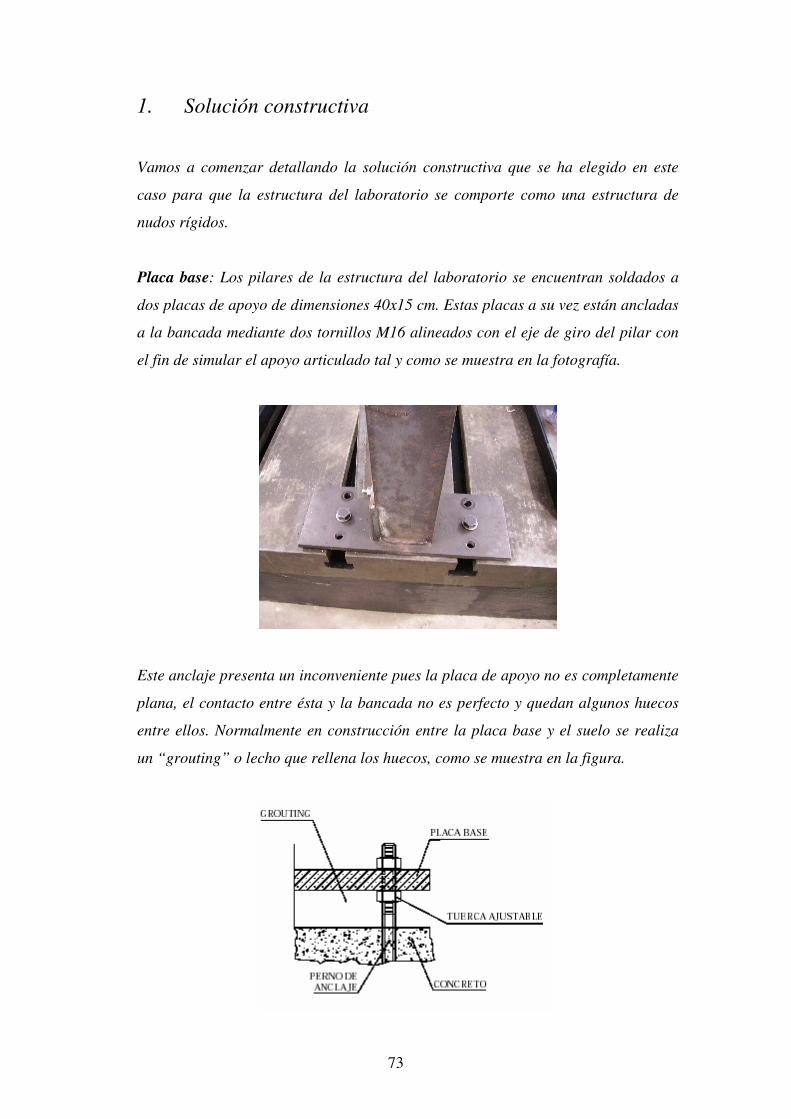
73
1. Solución constructiva
Vamos a comenzar detallando la solución constructiva que se ha elegido en este
caso para que la estructura del laboratorio se comporte como una estructura de
nudos rígidos.
Placa base: Los pilares de la estructura del laboratorio se encuentran soldados a
dos placas de apoyo de dimensiones 40x15 cm. Estas placas a su vez están ancladas
a la bancada mediante dos tornillos M16 alineados con el eje de giro del pilar con
el fin de simular el apoyo articulado tal y como se muestra en la fotografía.
Este anclaje presenta un inconveniente pues la placa de apoyo no es completamente
plana, el contacto entre ésta y la bancada no es perfecto y quedan algunos huecos
entre ellos. Normalmente en construcción entre la placa base y el suelo se realiza
un “grouting” o lecho que rellena los huecos, como se muestra en la figura.

74
Unión placa-pilar. La unión entre pilar y placa de apoyo se ha resuelto mediante la
soldadura de las alas del perfil tal y como hemos podido observar en la anterior
fotografía.
Aunque la forma ideal de modelar un apoyo articulado de un pilar requeriría
construir una articulación, normalmente se considera igualmente apoyo articulado
si el pilar está soldado a la placa de apoyo si previamente hemos dispuesto que sea
la placa la que absorba el posible giro. Así pues en principio esta solución es
correcta como podemos ver en la siguiente figura:
Unión pilar-dintel. La unión entre la viga y el pilar la hemos resuelto mediante dos
tornillos de métrica M10 que unen un ala del pilar con una placa soldada al
extremos del dintel, como se muestra a continuación.

75
Esta solución no nos garantiza que no se transmita momento a través de la unión.
Es más recomendable realizar la unión entre el ala del pilar y el alma del dintel,
bien atornillada o bien mediante soldadura tal y como se indica en las siguientes
figuras.
Unión largueros-dintel. Esta unión se realiza mediante un tornillo de métrica M10
que une un larguero a una placa soldada a las alas del dintel, tal y como muestra la
figura.
Esta unión es muy adecuada si no queremos que la misma transmita momentos.

76
2. Resultados experimentales
Para una carga de 3000 N se obtuvo en desplazamiento de 0,21510965 mm.
Si representamos el desplazamiento en función de la carga aplicada tendremos:
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Podemos observar que la estructura tiene un comportamiento lineal, por lo que nos
encontramos dentro del régimen elástico. También podemos ver que las rectas de
carga y descarga siguen casi el mismo camino. La pequeña desviación puede ser
debida a histéresis de alguno de los sistemas de medida.

77
3. Resolución por Teoría de Estructuras
Para la resolución del problema hemos hecho la aproximación de considerar que la
viga está formada por dos barras para poder tratar el nudo 5 como un nudo
articulado normal. Esto puede hacerse así porque dos barras colineales trabajarán
de idéntica forma.
Lo primero que tenemos que hacer para resolver el problema mediante la teoría de
estructuras es determinar cuales son las barras que realmente están trabajando y
cuales no. Para ello podemos seguir unas sencillas reglas:
Dos barras unidas mediante un nudo en el que no hay ninguna carga aplicada no
trabajan. Por lo tanto las barras a y b no están trabajando.
Una barra que esta unida a otra en un nudo en el que hay una carga aplicada en
dirección colineal a la segunda no trabaja. Este caso se da en el nudo 3, por lo que
la barra d no trabaja.

78
Por ultimo podemos suponer que la carga va a estar aplicada en el nudo 5, y así
eliminar la barra c también.
Nos queda por lo tanto la siguiente estructura simplificada:
A esta estructura ya le podemos calcular el grado de hiperestaticidad:
b = 2 r = 4 n = 3
032322 =⋅−+=−+= nrbh
Por lo tanto nos encontramos ante un conjunto isostático, al cual no hay que
incluirle ninguna variable hiperestática para resolverlo.
Lo vamos a resolver gráficamente, aplicando equilibrio de fuerzas en el nudo 5.

79
∑ = 0hF : 0º43cosº43cos =⋅−⋅+− fe NNP
∑ = 0vF : 0º43º43 =⋅+⋅ senNsenN fe
De la segunda ecuación tenemos que Ne y Nf son iguales y de signo contrario, por lo
que una barra estará a tracción y la otra a compresión.
Si sustituimos esto en la primera ecuación obtendremos el valor de los axiles para
las dos barras en función de P:
º43cos2 ⋅=
PNe a compresión.
º43cos2 ⋅−=
PN f a tracción.
Para terminar, calcularemos el desplazamiento horizontal del nudo 5. El
desplazamiento total del nudo es la suma de los vectores de alargamiento y
acortamiento de las barras f y e. Para obtener el desplazamiento horizontal
sumaremos las proyecciones horizontales de lo que se acortan y alargan las barras
e y f. El desplazamiento vertical resultante es nulo, pues se anulan ambas
componentes.

80
∆Lf
∇Le
ux
AE
LP
AE
LP
AE
LNu x
⋅
⋅=⋅
⋅⋅⋅
⋅⋅=⋅
⋅
⋅⋅= º43cos
º43cos22º43cos2
0)º43sin(º43sin =−⋅⋅
⋅+⋅
⋅
⋅=
AE
LN
AE
LNu y
A fin de poder comparar los resultados obtenidos por la teoría de estructuras con
los experimentales resolveremos para varios valores de carga mediante Matlab.
Para una carga de 3000 N se obtuvo un desplazamiento máximo de 0,046382 mm.
Si representamos el desplazamiento en función de la carga aplicada tendremos:
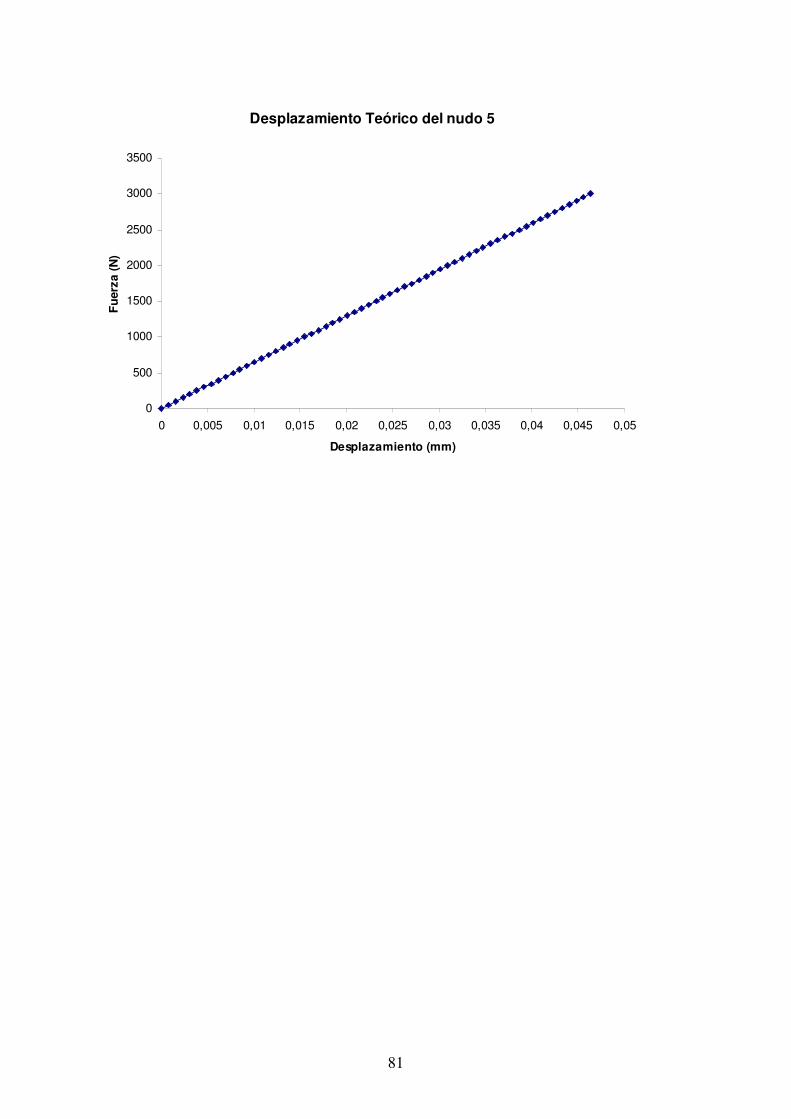
81
Desplazamiento Teórico del nudo 5
0
500
1000
1500
2000
2500
3000
3500
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05
Desplazamiento (mm)
Fu
erz
a (
N)

82
4. Resolución mediante un modelo en ANSYS
A la hora de comparar los resultados experimentales con los obtenidos mediante el
método matricial dado por la teoría de estructuras, puede resultarnos de gran
ayuda obtener una tercera solución en caso de que haya diferencias importantes
entre unos resultados y otros. Por ello hemos realizado un modelo mediante el
programa de elementos finitos ANSYS.
Para su realización se han utilizado elementos LINK1, pues las barras sólo
trabajan a tracción y compresión, con distintas constantes reales para los largueros
que para pospilares y la viga, y un mallado de un único elemento para cada barra,
al estar trabajando con elementos LINK1.
La forma de la deformada obtenida es la siguiente:

83
Para una carga de 3000 N se obtuvo un desplazamiento máximo en el nudo 5 de
0.044518 mm. Si representamos el desplazamiento en función de la carga aplicada
tendremos:
Desplazamiento del nudo 5 previsto por el modelo en ANSYS
0
500
1000
1500
2000
2500
3000
3500
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05
Desplazamiento (mm)
Fu
erz
a (
N)
Si representamos los esfuerzos a los que se ve sometida la estructura podemos
comprobar que únicamente están trabajando los largueros, además de la barra en
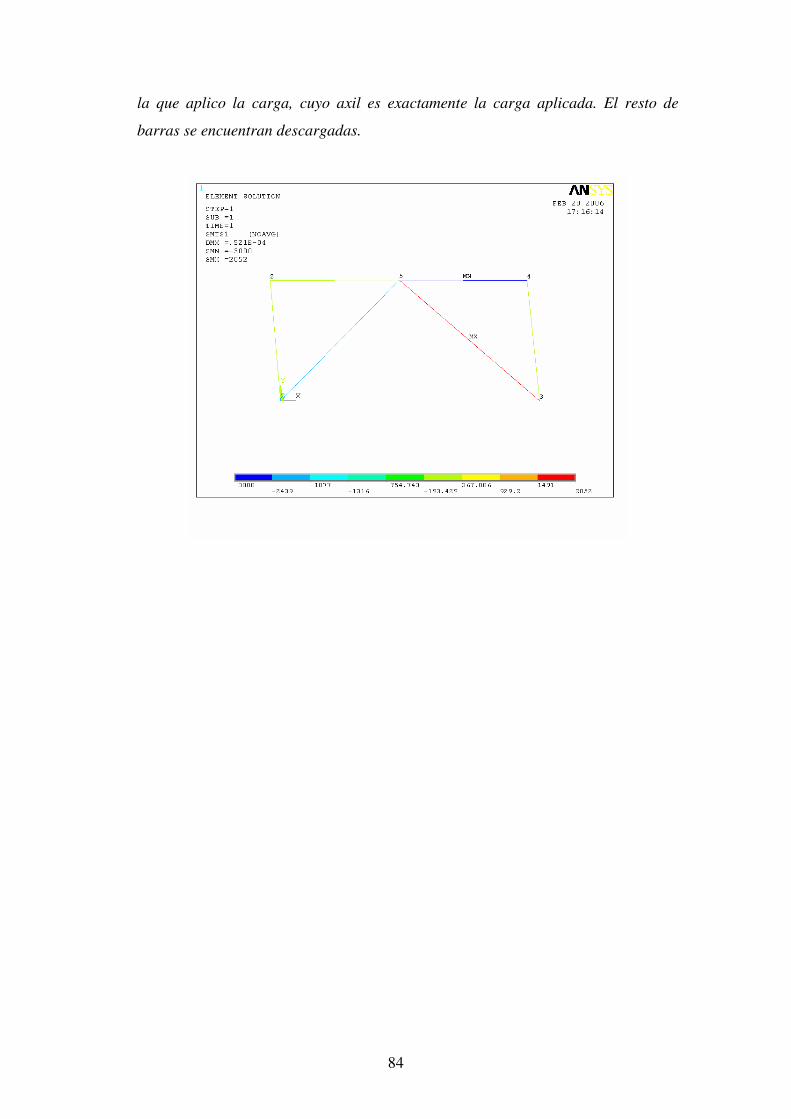
84
la que aplico la carga, cuyo axil es exactamente la carga aplicada. El resto de
barras se encuentran descargadas.
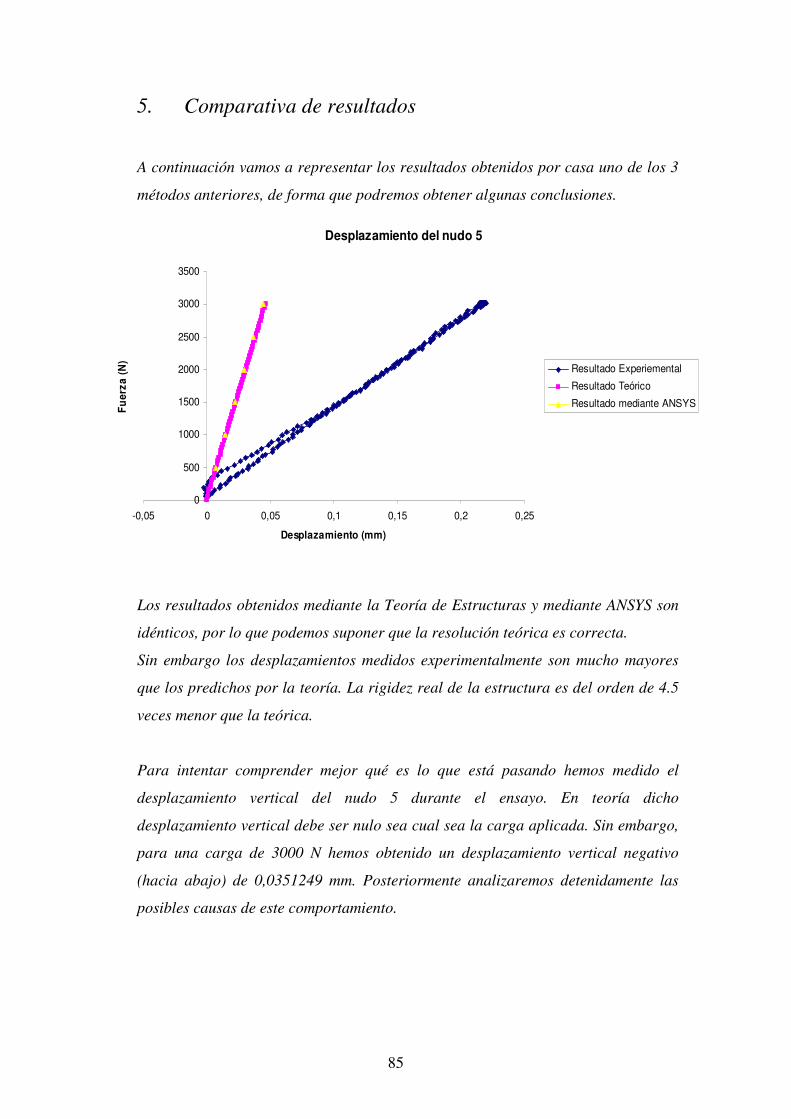
85
5. Comparativa de resultados
A continuación vamos a representar los resultados obtenidos por casa uno de los 3
métodos anteriores, de forma que podremos obtener algunas conclusiones.
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Resultado Experiemental
Resultado Teórico
Resultado mediante ANSYS
Los resultados obtenidos mediante la Teoría de Estructuras y mediante ANSYS son
idénticos, por lo que podemos suponer que la resolución teórica es correcta.
Sin embargo los desplazamientos medidos experimentalmente son mucho mayores
que los predichos por la teoría. La rigidez real de la estructura es del orden de 4.5
veces menor que la teórica.
Para intentar comprender mejor qué es lo que está pasando hemos medido el
desplazamiento vertical del nudo 5 durante el ensayo. En teoría dicho
desplazamiento vertical debe ser nulo sea cual sea la carga aplicada. Sin embargo,
para una carga de 3000 N hemos obtenido un desplazamiento vertical negativo
(hacia abajo) de 0,0351249 mm. Posteriormente analizaremos detenidamente las
posibles causas de este comportamiento.
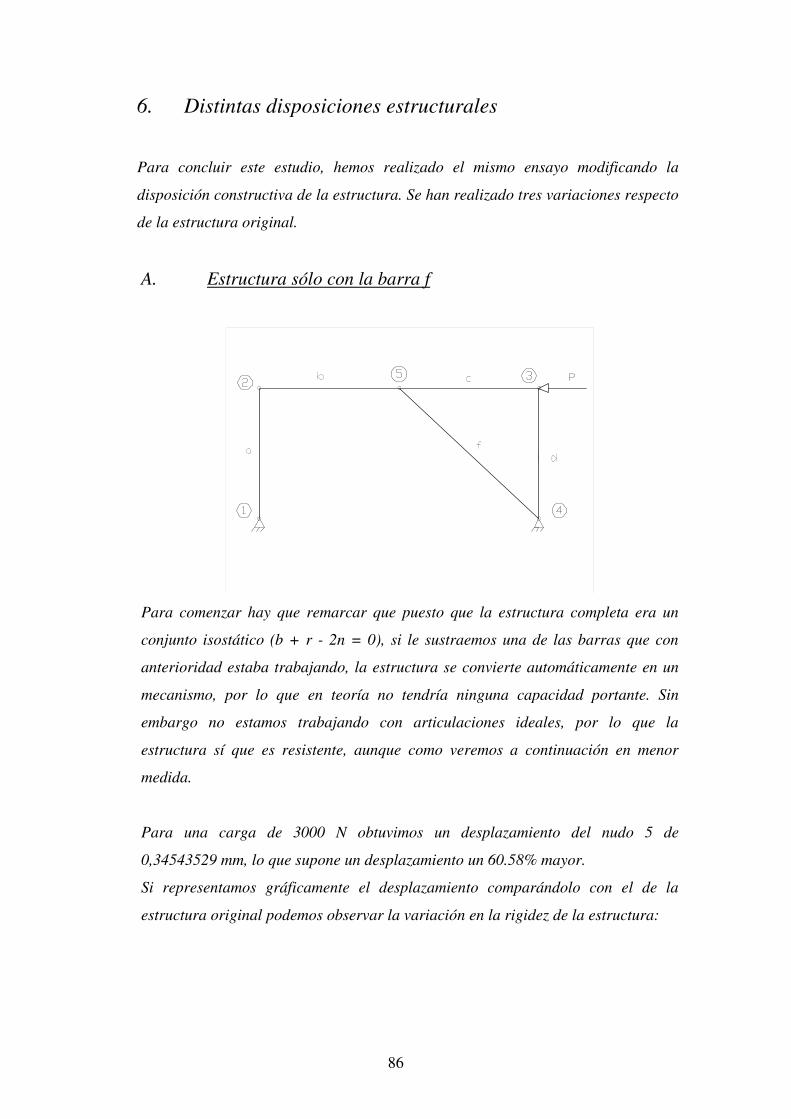
86
6. Distintas disposiciones estructurales
Para concluir este estudio, hemos realizado el mismo ensayo modificando la
disposición constructiva de la estructura. Se han realizado tres variaciones respecto
de la estructura original.
A. Estructura sólo con la barra f
Para comenzar hay que remarcar que puesto que la estructura completa era un
conjunto isostático (b + r - 2n = 0), si le sustraemos una de las barras que con
anterioridad estaba trabajando, la estructura se convierte automáticamente en un
mecanismo, por lo que en teoría no tendría ninguna capacidad portante. Sin
embargo no estamos trabajando con articulaciones ideales, por lo que la
estructura sí que es resistente, aunque como veremos a continuación en menor
medida.
Para una carga de 3000 N obtuvimos un desplazamiento del nudo 5 de
0,34543529 mm, lo que supone un desplazamiento un 60.58% mayor.
Si representamos gráficamente el desplazamiento comparándolo con el de la
estructura original podemos observar la variación en la rigidez de la estructura:

87
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,1 0 0,1 0,2 0,3 0,4
Desplazamiento (mm)
Fuerz
a (N)
Estructura con barras e y f
Estructura sólo con barra f
Además, hemos medido el desplazamiento vertical del nudo 5 obteniendo como
resultado que éste se desplaza hacia abajo 0,076063 mm. La estructura completa
sufría un desplazamiento vertical negativo (hacia abajo) de 0,035851 mm. Esta
diferencia puede ser debida a que en la estructura original la barra e, al estar
trabajando a compresión, empuja al dintel hacia arriba contrarrestando el efecto
de la barra f, que al trabajar a tracción la empuja hacia abajo. Al faltar la barra e
el desplazamiento vertical será, lógicamente mayor.
B. Estructura sólo con la barra e
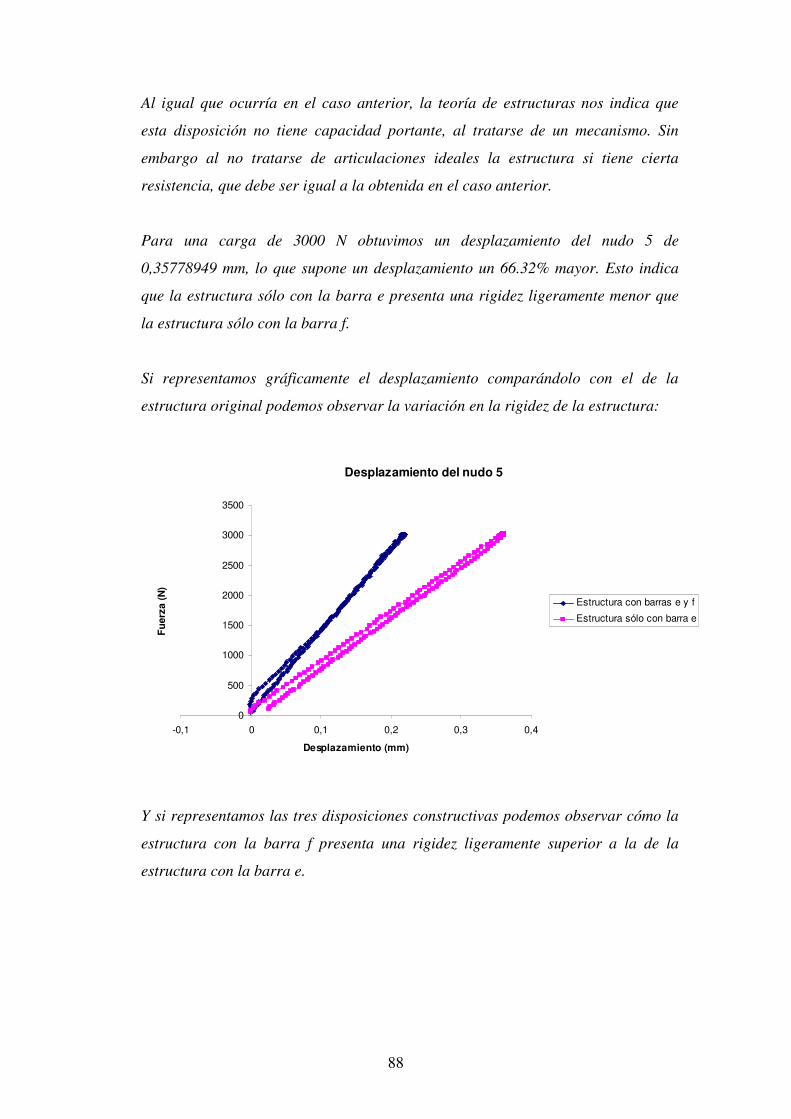
88
Al igual que ocurría en el caso anterior, la teoría de estructuras nos indica que
esta disposición no tiene capacidad portante, al tratarse de un mecanismo. Sin
embargo al no tratarse de articulaciones ideales la estructura si tiene cierta
resistencia, que debe ser igual a la obtenida en el caso anterior.
Para una carga de 3000 N obtuvimos un desplazamiento del nudo 5 de
0,35778949 mm, lo que supone un desplazamiento un 66.32% mayor. Esto indica
que la estructura sólo con la barra e presenta una rigidez ligeramente menor que
la estructura sólo con la barra f.
Si representamos gráficamente el desplazamiento comparándolo con el de la
estructura original podemos observar la variación en la rigidez de la estructura:
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,1 0 0,1 0,2 0,3 0,4
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sólo con barra e
Y si representamos las tres disposiciones constructivas podemos observar cómo la
estructura con la barra f presenta una rigidez ligeramente superior a la de la
estructura con la barra e.
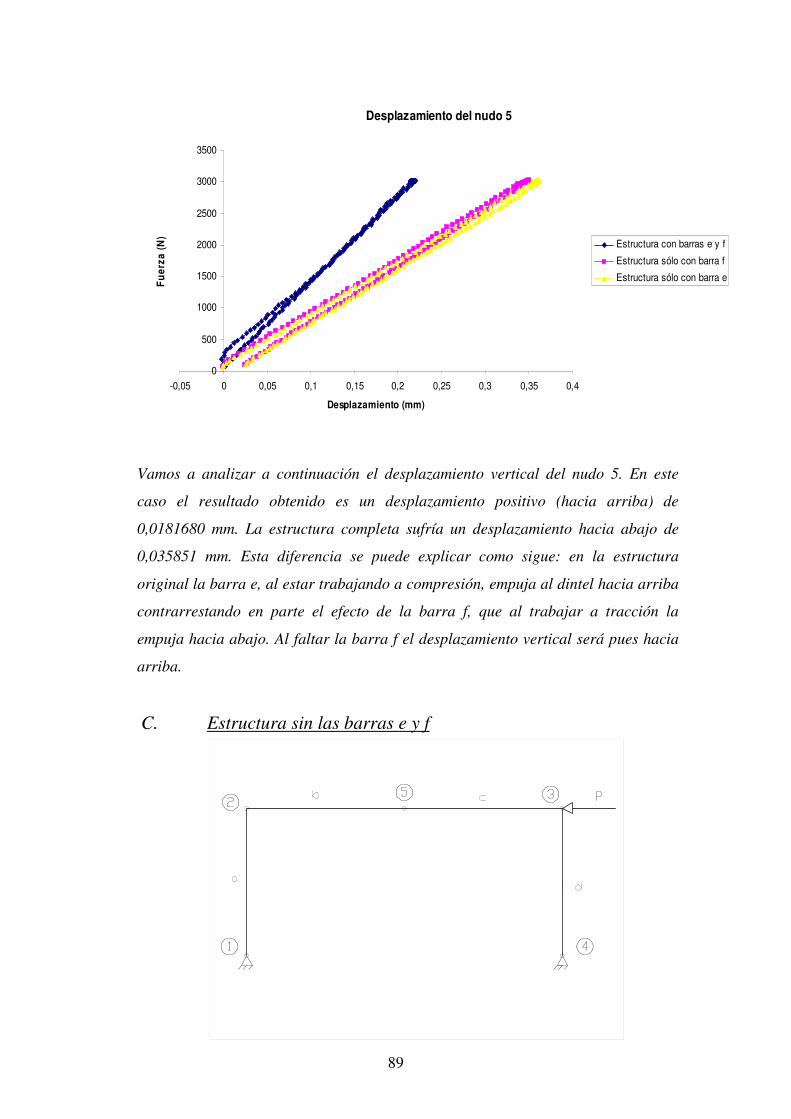
89
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 0,4
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sólo con barra f
Estructura sólo con barra e
Vamos a analizar a continuación el desplazamiento vertical del nudo 5. En este
caso el resultado obtenido es un desplazamiento positivo (hacia arriba) de
0,0181680 mm. La estructura completa sufría un desplazamiento hacia abajo de
0,035851 mm. Esta diferencia se puede explicar como sigue: en la estructura
original la barra e, al estar trabajando a compresión, empuja al dintel hacia arriba
contrarrestando en parte el efecto de la barra f, que al trabajar a tracción la
empuja hacia abajo. Al faltar la barra f el desplazamiento vertical será pues hacia
arriba.
C. Estructura sin las barras e y f
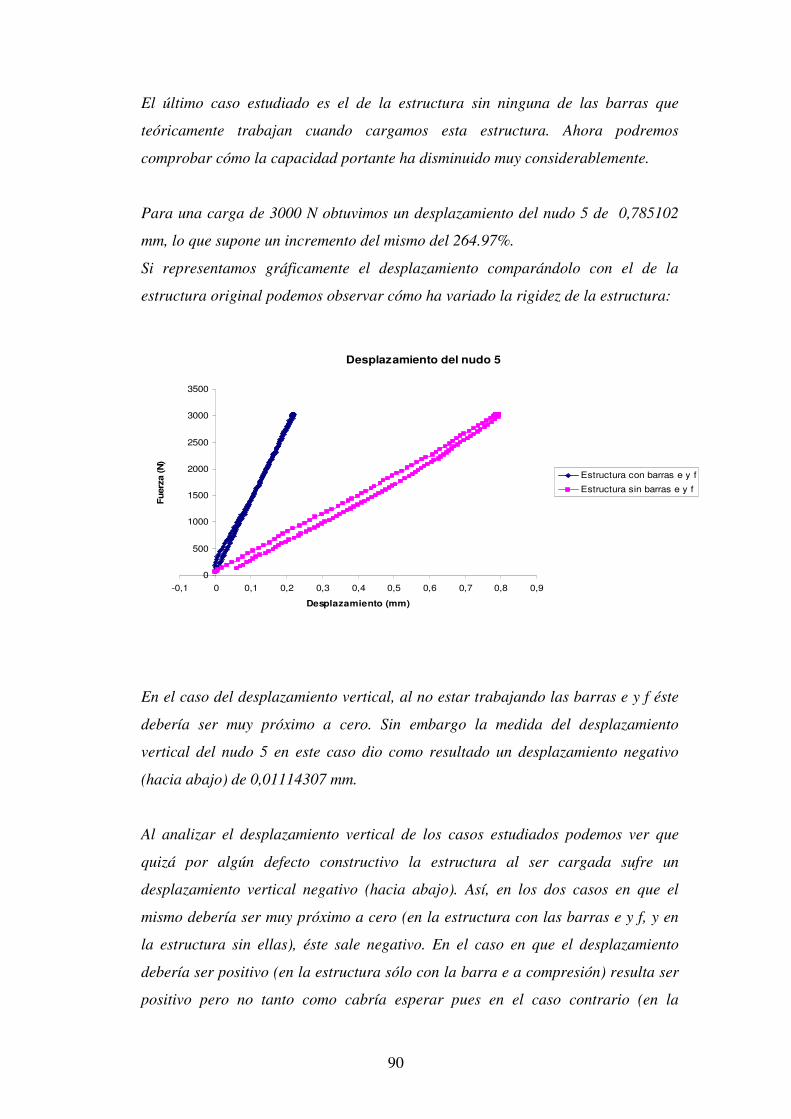
90
El último caso estudiado es el de la estructura sin ninguna de las barras que
teóricamente trabajan cuando cargamos esta estructura. Ahora podremos
comprobar cómo la capacidad portante ha disminuido muy considerablemente.
Para una carga de 3000 N obtuvimos un desplazamiento del nudo 5 de 0,785102
mm, lo que supone un incremento del mismo del 264.97%.
Si representamos gráficamente el desplazamiento comparándolo con el de la
estructura original podemos observar cómo ha variado la rigidez de la estructura:
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-0,1 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sin barras e y f
En el caso del desplazamiento vertical, al no estar trabajando las barras e y f éste
debería ser muy próximo a cero. Sin embargo la medida del desplazamiento
vertical del nudo 5 en este caso dio como resultado un desplazamiento negativo
(hacia abajo) de 0,01114307 mm.
Al analizar el desplazamiento vertical de los casos estudiados podemos ver que
quizá por algún defecto constructivo la estructura al ser cargada sufre un
desplazamiento vertical negativo (hacia abajo). Así, en los dos casos en que el
mismo debería ser muy próximo a cero (en la estructura con las barras e y f, y en
la estructura sin ellas), éste sale negativo. En el caso en que el desplazamiento
debería ser positivo (en la estructura sólo con la barra e a compresión) resulta ser
positivo pero no tanto como cabría esperar pues en el caso contrario (en la
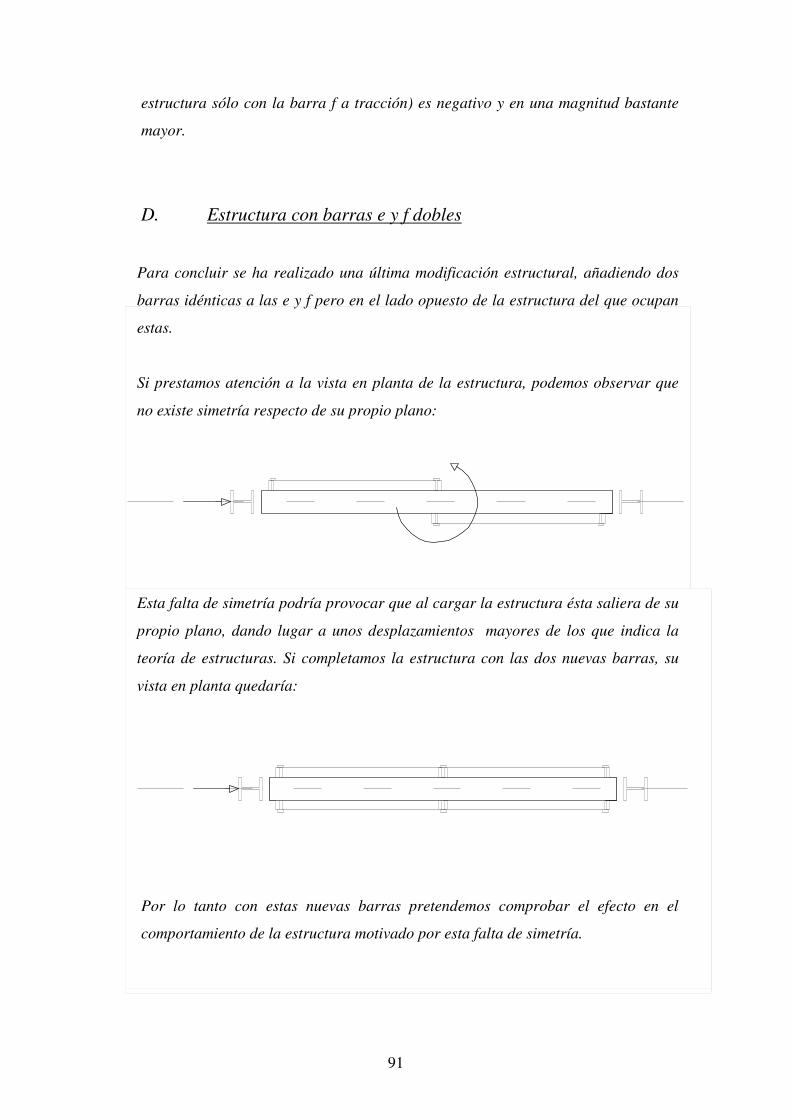
91
estructura sólo con la barra f a tracción) es negativo y en una magnitud bastante
mayor.
D. Estructura con barras e y f dobles
Para concluir se ha realizado una última modificación estructural, añadiendo dos
barras idénticas a las e y f pero en el lado opuesto de la estructura del que ocupan
estas.
Si prestamos atención a la vista en planta de la estructura, podemos observar que
no existe simetría respecto de su propio plano:
Esta falta de simetría podría provocar que al cargar la estructura ésta saliera de su
propio plano, dando lugar a unos desplazamientos mayores de los que indica la
teoría de estructuras. Si completamos la estructura con las dos nuevas barras, su
vista en planta quedaría:
Por lo tanto con estas nuevas barras pretendemos comprobar el efecto en el
comportamiento de la estructura motivado por esta falta de simetría.
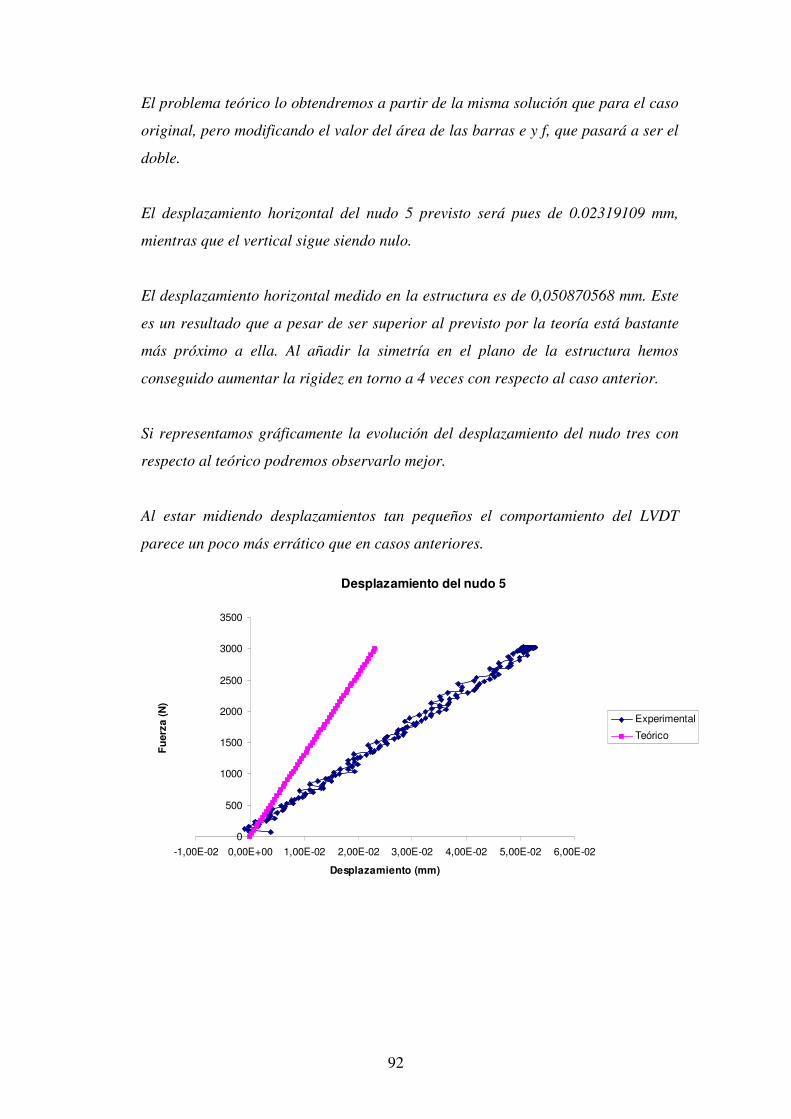
92
El problema teórico lo obtendremos a partir de la misma solución que para el caso
original, pero modificando el valor del área de las barras e y f, que pasará a ser el
doble.
El desplazamiento horizontal del nudo 5 previsto será pues de 0.02319109 mm,
mientras que el vertical sigue siendo nulo.
El desplazamiento horizontal medido en la estructura es de 0,050870568 mm. Este
es un resultado que a pesar de ser superior al previsto por la teoría está bastante
más próximo a ella. Al añadir la simetría en el plano de la estructura hemos
conseguido aumentar la rigidez en torno a 4 veces con respecto al caso anterior.
Si representamos gráficamente la evolución del desplazamiento del nudo tres con
respecto al teórico podremos observarlo mejor.
Al estar midiendo desplazamientos tan pequeños el comportamiento del LVDT
parece un poco más errático que en casos anteriores.
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-1,00E-02 0,00E+00 1,00E-02 2,00E-02 3,00E-02 4,00E-02 5,00E-02 6,00E-02
Desplazamiento (mm)
Fu
erz
a (
N)
Experimental
Teórico
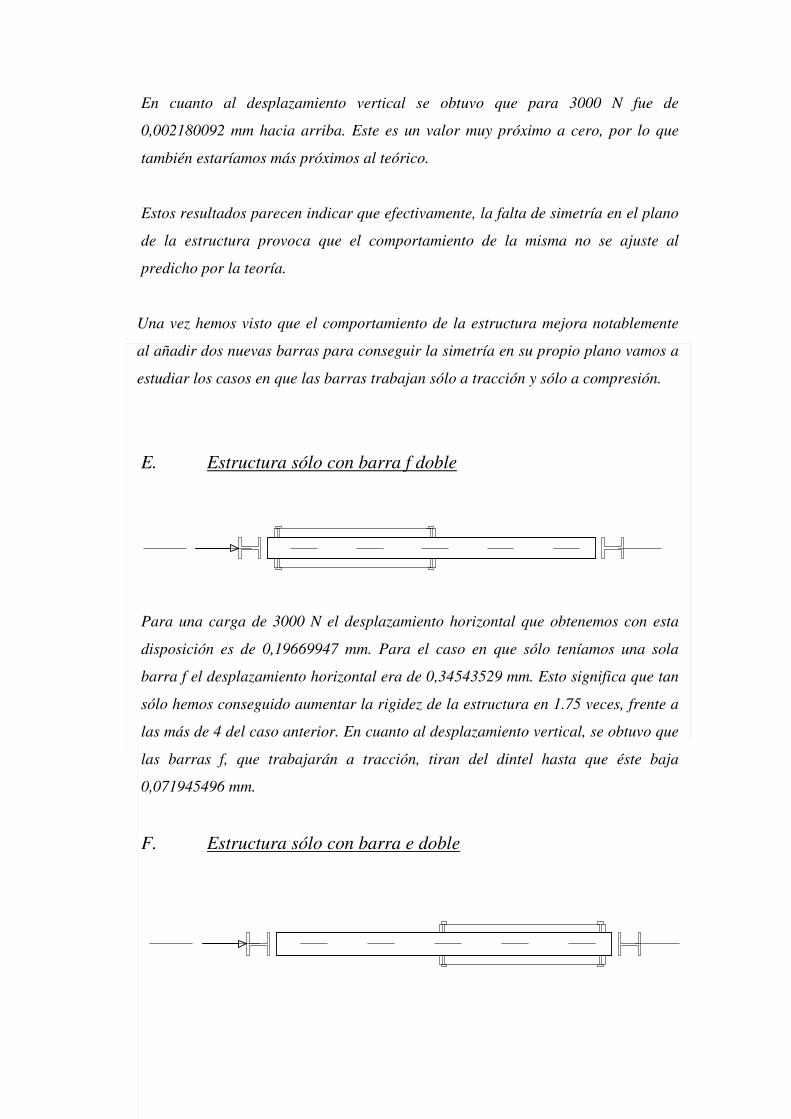
93
En cuanto al desplazamiento vertical se obtuvo que para 3000 N fue de
0,002180092 mm hacia arriba. Este es un valor muy próximo a cero, por lo que
también estaríamos más próximos al teórico.
Estos resultados parecen indicar que efectivamente, la falta de simetría en el plano
de la estructura provoca que el comportamiento de la misma no se ajuste al
predicho por la teoría.
Una vez hemos visto que el comportamiento de la estructura mejora notablemente
al añadir dos nuevas barras para conseguir la simetría en su propio plano vamos a
estudiar los casos en que las barras trabajan sólo a tracción y sólo a compresión.
E. Estructura sólo con barra f doble
Para una carga de 3000 N el desplazamiento horizontal que obtenemos con esta
disposición es de 0,19669947 mm. Para el caso en que sólo teníamos una sola
barra f el desplazamiento horizontal era de 0,34543529 mm. Esto significa que tan
sólo hemos conseguido aumentar la rigidez de la estructura en 1.75 veces, frente a
las más de 4 del caso anterior. En cuanto al desplazamiento vertical, se obtuvo que
las barras f, que trabajarán a tracción, tiran del dintel hasta que éste baja
0,071945496 mm.
F. Estructura sólo con barra e doble
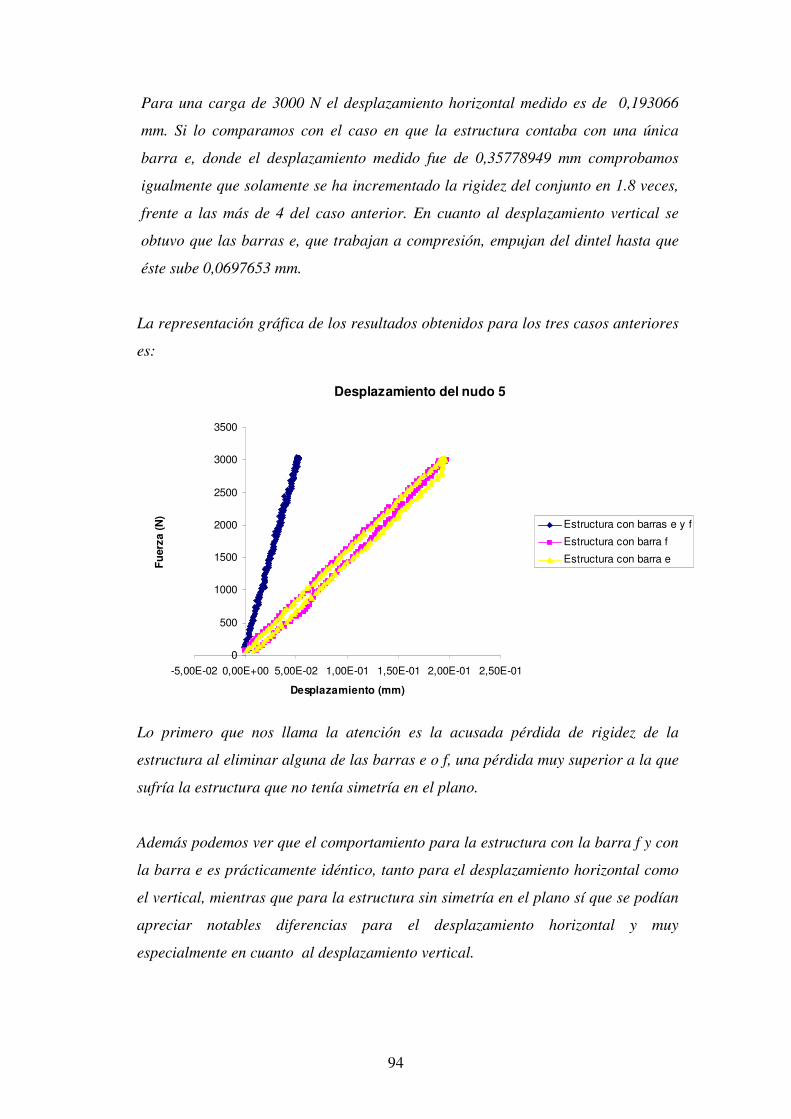
94
Para una carga de 3000 N el desplazamiento horizontal medido es de 0,193066
mm. Si lo comparamos con el caso en que la estructura contaba con una única
barra e, donde el desplazamiento medido fue de 0,35778949 mm comprobamos
igualmente que solamente se ha incrementado la rigidez del conjunto en 1.8 veces,
frente a las más de 4 del caso anterior. En cuanto al desplazamiento vertical se
obtuvo que las barras e, que trabajan a compresión, empujan del dintel hasta que
éste sube 0,0697653 mm.
La representación gráfica de los resultados obtenidos para los tres casos anteriores
es:
Desplazamiento del nudo 5
0
500
1000
1500
2000
2500
3000
3500
-5,00E-02 0,00E+00 5,00E-02 1,00E-01 1,50E-01 2,00E-01 2,50E-01
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura con barra f
Estructura con barra e
Lo primero que nos llama la atención es la acusada pérdida de rigidez de la
estructura al eliminar alguna de las barras e o f, una pérdida muy superior a la que
sufría la estructura que no tenía simetría en el plano.
Además podemos ver que el comportamiento para la estructura con la barra f y con
la barra e es prácticamente idéntico, tanto para el desplazamiento horizontal como
el vertical, mientras que para la estructura sin simetría en el plano sí que se podían
apreciar notables diferencias para el desplazamiento horizontal y muy
especialmente en cuanto al desplazamiento vertical.
95
G. Ensayos ante carga de 15000 N
Una vez hemos comprobado que parte del mal comportamiento de la estructura
puede ser debido a la falta de simetría dentro de su propio plano, deberemos
analizar también la posibilidad de la existencia de asientos que no son detectables
a la carga de ensayo (3000 N). Estos asientos pueden favorecer el desplazamiento
de la estructura mientras ésta no está realmente trabajando. La única forma de
detectar los asientos sería aplicar una fuerza a la estructura muy superior a la
carga de ensayo y ver si el comportamiento sigue siendo lineal.
Aunque el equipo disponible en el laboratorio tiene una capacidad de carga de
10000 N, realmente en la calibración de las células de carga no se alcanzaron más
que 8000 N. Esta carga se antojaba insuficiente para detectar los asientos antes
mencionados, por lo que se ideó un mecanismo que nos permitiera aumentar la
capacidad de carga.
Así pues, una vez diseñado y construido el mecanismo procedimos a repetir
distintos ensayos ya realizados pero aumentando la carga aplicada hasta 15000 N.
Estructura original ante 15000 N:
Para una carga de 15000 N el desplazamiento teórico del nudo 3 es de 0,231910
mm. Sin embargo se midió un desplazamiento horizontal de 1,2280992 mm, lo que
supone que la estructura sufre un desplazamiento 5 veces mayor al previsto por la
teoría.
A continuación se muestra la gráfica donde se ven los resultados obtenidos:
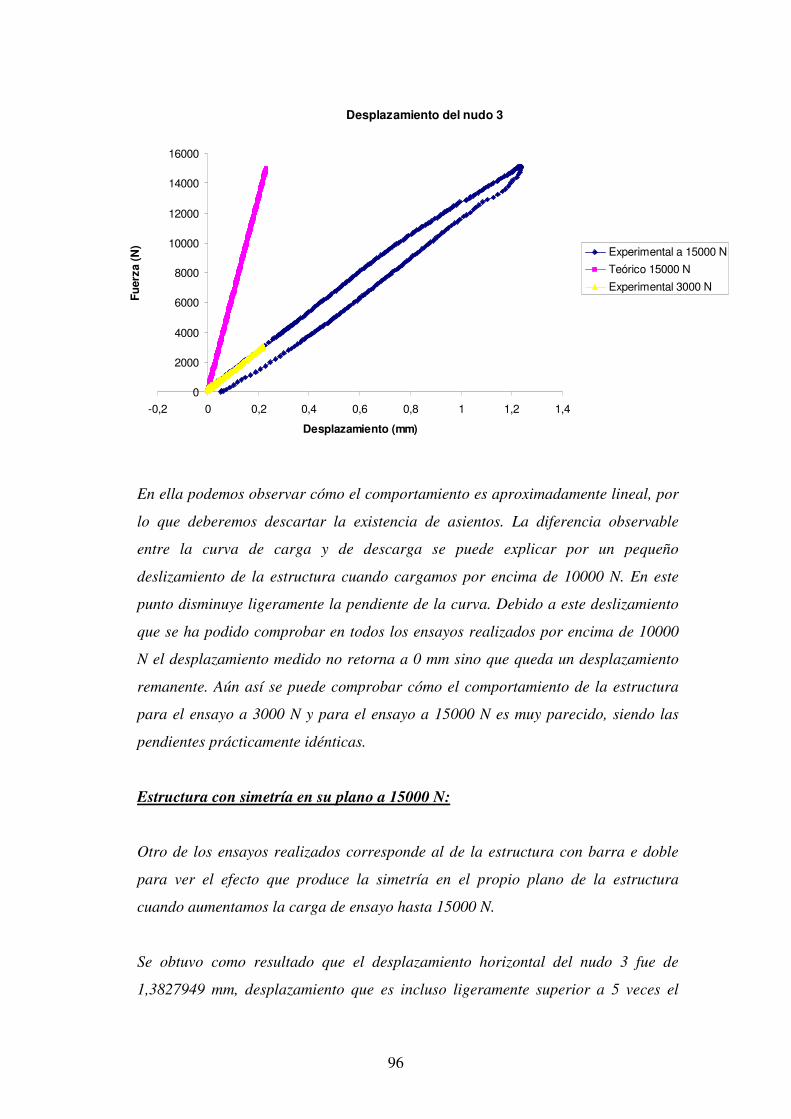
96
Desplazamiento del nudo 3
0
2000
4000
6000
8000
10000
12000
14000
16000
-0,2 0 0,2 0,4 0,6 0,8 1 1,2 1,4
Desplazamiento (mm)
Fu
erz
a (
N)
Experimental a 15000 N
Teórico 15000 N
Experimental 3000 N
En ella podemos observar cómo el comportamiento es aproximadamente lineal, por
lo que deberemos descartar la existencia de asientos. La diferencia observable
entre la curva de carga y de descarga se puede explicar por un pequeño
deslizamiento de la estructura cuando cargamos por encima de 10000 N. En este
punto disminuye ligeramente la pendiente de la curva. Debido a este deslizamiento
que se ha podido comprobar en todos los ensayos realizados por encima de 10000
N el desplazamiento medido no retorna a 0 mm sino que queda un desplazamiento
remanente. Aún así se puede comprobar cómo el comportamiento de la estructura
para el ensayo a 3000 N y para el ensayo a 15000 N es muy parecido, siendo las
pendientes prácticamente idénticas.
Estructura con simetría en su plano a 15000 N:
Otro de los ensayos realizados corresponde al de la estructura con barra e doble
para ver el efecto que produce la simetría en el propio plano de la estructura
cuando aumentamos la carga de ensayo hasta 15000 N.
Se obtuvo como resultado que el desplazamiento horizontal del nudo 3 fue de
1,3827949 mm, desplazamiento que es incluso ligeramente superior a 5 veces el
97
medido para la misma estructura en el ensayo de 3000 N. Una vez más no parece
que la estructura comience a trabajar mejor a partir de una cierta carga, siendo
nuevamente su comportamiento bastante lineal.
Estructura sin diagonales a 15000 N
El último ensayo realizado con carga de 15000 N se realizó sobre la estructura sin
diagonales, que es la menos rígida de todas las configuraciones estudiadas, para
ver si en este caso el comportamiento continuaba siendo lineal.
Como resultado se obtuvo que el desplazamiento horizontal del nudo 3 fue de
3,6945109 mm, que es aproximadamente 5 veces el desplazamiento medido para la
misma estructura en el ensayo de 3000 N. Una vez más se pone de manifiesto la
linealidad en el comportamiento de la estructura sea cual fuere la configuración
estructural de la misma y la carga aplicada.
De todo ello podemos deducir que la estructura se encuentra trabajando
normalmente desde el primer momento en que se somete a carga, ya que como ha
quedado demostrado no se aprecia la existencia de asientos que favorezcan un
comportamiento anormal.
98
7. Conclusiones
A raíz de los resultados obtenidos, podemos extraer algunas conclusiones que
merece la pena resaltar:
Para la estructura sin simetría en su propio plano (barras e y f simples)
1º Podemos admitir que el comportamiento de la estructura no se corresponde con
la teoría de estructuras. Los desplazamientos previstos por ella son casi cinco
veces menores que los obtenidos experimentalmente.
2º En los casos en que a la estructura le faltan una de las barras e o f, o ambas a la
vez, el grado de hiperestaticidad de la estructura es negativo, o lo que es lo mismo,
la estructura debería comportarse como un mecanismo, no debiendo presentar
rigidez alguna ante la carga aplicada. Sin embargo, aunque reducida, si que
presenta cierta rigidez. Esto es debido a que los nudos de la estructura no son
nudos articulados ideales, por lo que transmiten momento.
3º Aunque hemos comprobado que la teoría de estructuras no se cumple en este
caso, sí que nos da cierta idea de cómo se va a comportar la estructura ya que a la
vista de los resultados son las barras e y f las que están trabajando en mayor
medida, como preveía la teoría. Si las eliminamos, la rigidez del conjunto se ve
disminuida muy considerablemente.
4º El comportamiento de la estructura con una sola diagonal no es independiente
de si este trabaja a tracción o a compresión. Ambas disposiciones presentan
distintos desplazamientos horizontales y verticales.
5º Al someter a carga la estructura se produce un desplazamiento vertical negativo
de forma invariable, que se sumará al desplazamiento esperado para cada uno de
los casos estudiados.

99
6º Debemos descartar la existencia de asientos que favorezcan un comportamiento
anormal de la estructura.
Para la estructura con simetría dentro de su propio plano (barras e y f dobles)
1º El comportamiento de la estructura completa (con barras e y f) mejora
sustancialmente con respecto al caso anterior, acercándonos bastante a los valores
teóricos de desplazamiento horizontal y vertical.
2º Sin embargo, al eliminar alguna de las barras e o f la pérdida de capacidad
portante es muy acusada, presentando nuevamente un desplazamiento horizontal
mayor del que cabría esperar.
3º La estructura se comportará de forma idéntica si trabaja con las diagonales sólo
a tracción o sólo a compresión, al contrario de lo que ocurría cuando no existía
simetría en el plano.
4º Por todo ello se puede concluir que para una estructura de nudos articulados es
conveniente que ésta presente simetría dentro de su propio plano.
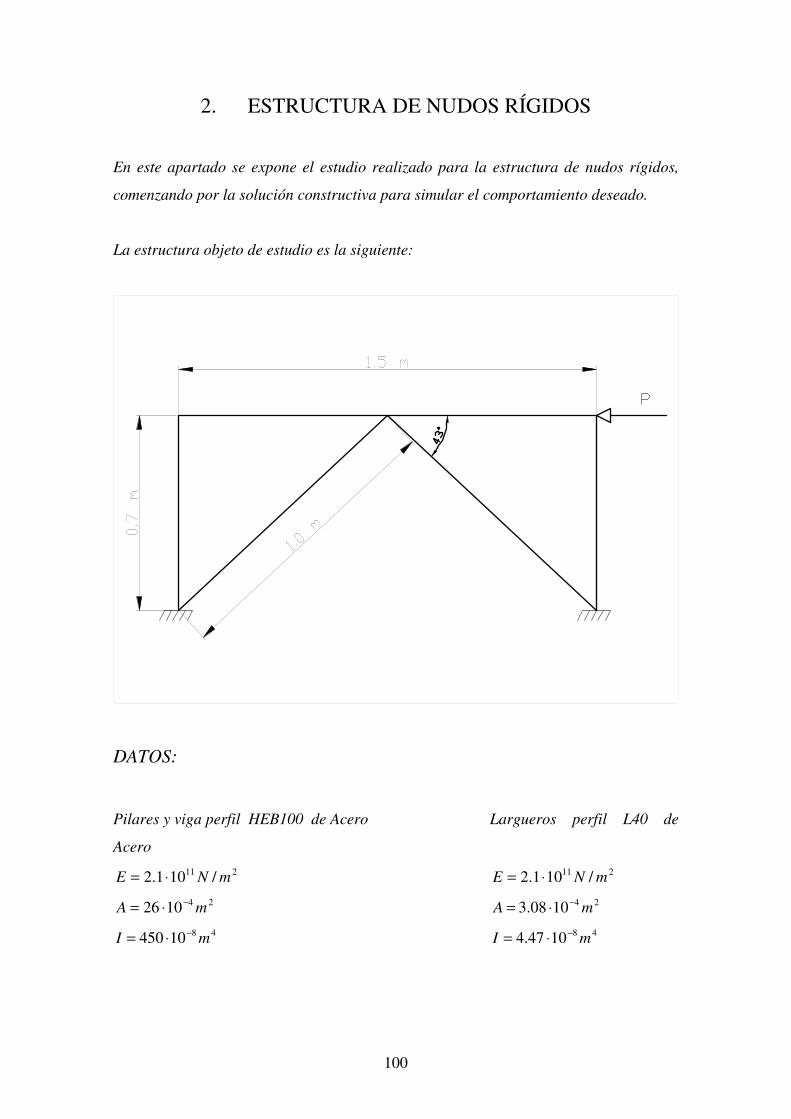
100
2. ESTRUCTURA DE NUDOS RÍGIDOS
En este apartado se expone el estudio realizado para la estructura de nudos rígidos,
comenzando por la solución constructiva para simular el comportamiento deseado.
La estructura objeto de estudio es la siguiente:
DATOS:
Pilares y viga perfil HEB100 de Acero Largueros perfil L40 de
Acero
211 /101.2 mNE ⋅= 211 /101.2 mNE ⋅=
241026 mA −⋅= 241008.3 mA −⋅=
4810450 mI −⋅= 481047.4 mI −⋅=

101
1. Solución constructiva
Vamos a comenzar detallando la solución constructiva que se ha elegido en este
caso para que la estructura del laboratorio se comporte como una estructura de
nudos rígidos.
Placa de apoyo. Los pilares de la estructura del laboratorio se encuentran soldados
a dos placas de apoyo de dimensiones 40x15 cm. Estas placas a su vez están
ancladas a la bancada mediante cuatro tornillos M16 con el fin de simular un
empotramiento.
Al igual que en el caso articulado, este anclaje presenta algún inconveniente pues
la placa de apoyo no es completamente plana, el contacto entre ésta y la bancada
no es perfecto y quedan algunos huecos entre ellos. Normalmente en construcción
entre la placa base y el suelo se realiza un “grouting” o lecho que rellena los
huecos, como se muestra en la figura.

102
Unión placa-pilar. Esta unión se resuelve al igual que en el caso articulado
mediante la soldadura de las alas del perfil a la placa tal y como se puede ver en la
anterior fotografía.
Las recomendaciones para conseguir un apoyo rígido indican que es conveniente
soldar alma y alas a la placa de apoyo e incluso también sugieren la posibilidad de
usar rigidizadores para favorecer la transmisión de momento, como indica la
figura.
Unión pilar-dintel. La unión entre la viga y el pilar la hemos resuelto mediante
cuatro tornillos que unen un ala del pilar con una placa soldada al extremos del
dintel, como se muestra a continuación.
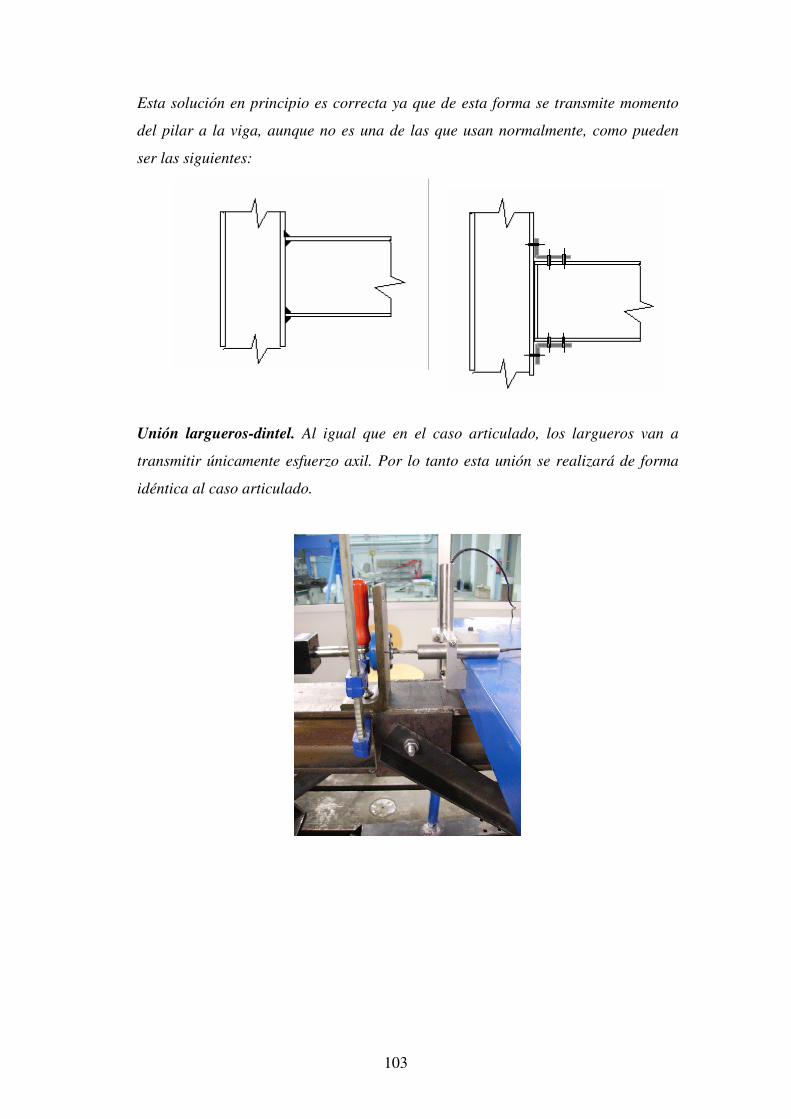
103
Esta solución en principio es correcta ya que de esta forma se transmite momento
del pilar a la viga, aunque no es una de las que usan normalmente, como pueden
ser las siguientes:
Unión largueros-dintel. Al igual que en el caso articulado, los largueros van a
transmitir únicamente esfuerzo axil. Por lo tanto esta unión se realizará de forma
idéntica al caso articulado.
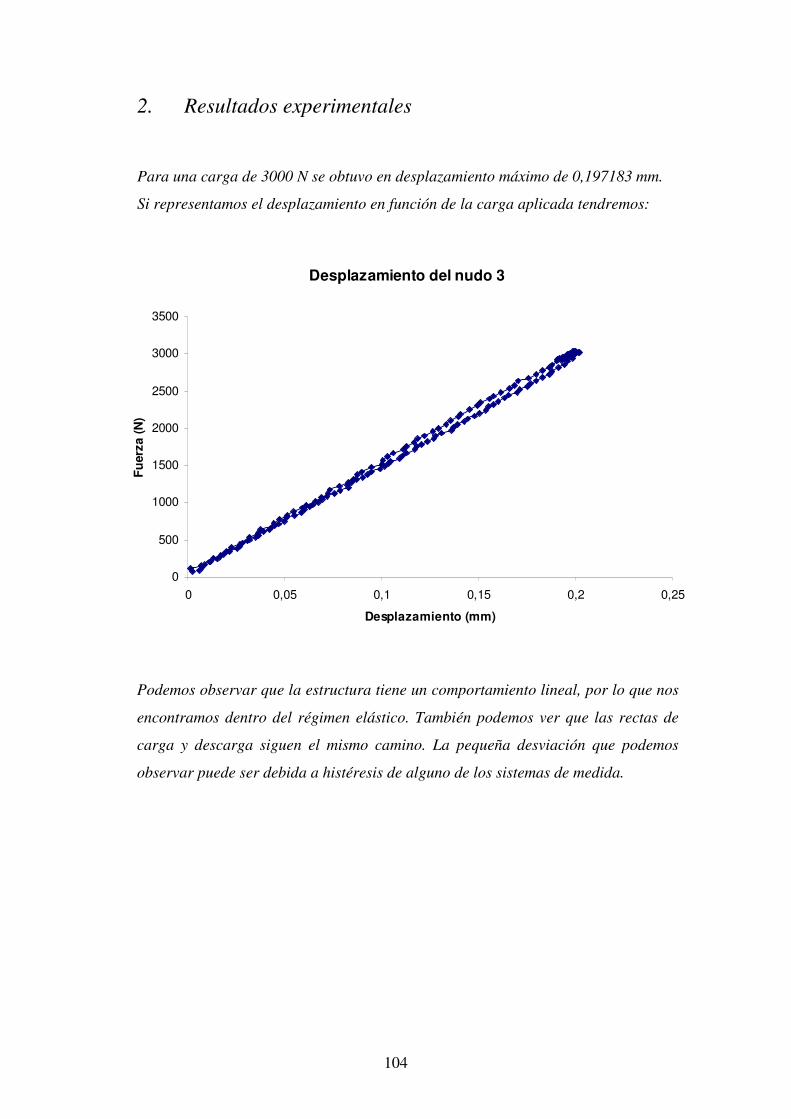
104
2. Resultados experimentales
Para una carga de 3000 N se obtuvo en desplazamiento máximo de 0,197183 mm.
Si representamos el desplazamiento en función de la carga aplicada tendremos:
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Podemos observar que la estructura tiene un comportamiento lineal, por lo que nos
encontramos dentro del régimen elástico. También podemos ver que las rectas de
carga y descarga siguen el mismo camino. La pequeña desviación que podemos
observar puede ser debida a histéresis de alguno de los sistemas de medida.
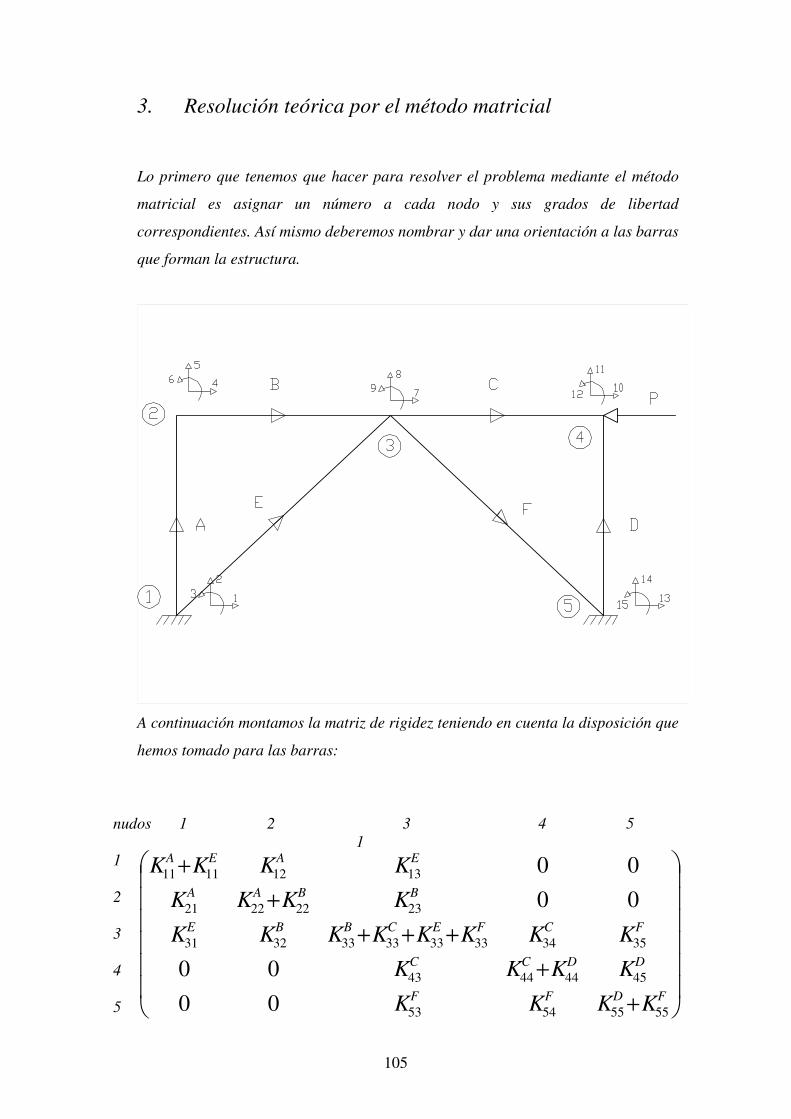
105
3. Resolución teórica por el método matricial
Lo primero que tenemos que hacer para resolver el problema mediante el método
matricial es asignar un número a cada nodo y sus grados de libertad
correspondientes. Así mismo deberemos nombrar y dar una orientación a las barras
que forman la estructura.
A continuación montamos la matriz de rigidez teniendo en cuenta la disposición que
hemos tomado para las barras:
nudos 1 2 3 4 5 1 1 2 3 4 5
+
+
+++
+
+
FDFF
DDCC
FCFECBBE
BBAA
EAEA
KKKK
KKKK
KKKKKKKK
KKKK
KKKK
55555453
45444443
3534333333333231
23222221
13121111
00
00
00
00

106
Con esta matriz de rigidez de la estructura ya podemos construir el sistema que nos
permitirá obtener los desplazamientos a partir del vector de cargas.
=
•
+
+
+++
+
+
5
4
3
2
1
5
4
3
2
1
55555453
45444443
3534333333333231
23222221
13121111
00
00
00
00
p
p
p
p
p
u
u
u
u
u
KKKK
KKKK
KKKKKKKK
KKKK
KKKK
FDFF
DDCC
FCFECBBE
BBAA
EAEA
Los grados de libertad correspondientes a los nudos 1 y 5 están impedidos, por lo que
podemos simplificarla eliminado las filas y columnas correspondientes a esos nudos:
+
+
+++
+
+
FDFF
DDCC
FCFECBBE
BBAA
EAEA
KKKK
KKKK
KKKKKKKK
KKKK
KKKK
55555453
45444443
3534333333333231
23222221
13121111
00
00
00
00
Por tanto nos queda la siguiente matriz de rigidez reducida, correspondiente únicamente a los grados de libertad de los nodos 2 3 y 4.
+
+++
+
DCC
CFECBB
BBA
KKK
KKKKKK
KKK
444443
343333333332
232222
0
0

107
Ahora debemos calcular cada una de las submatrices correspondientes a cada una
de las barras, teniendo en cuenta su orientación y longitud:
BARRA A (Elemento con nudos rígidos): º90=α l1 = 0.7 m
g.d.l 4 5 6
4
5
6
BARRA B (Elemento con nudos rígidos): º0=α l2 = 0.75 m
g.d.l. 4 5 6 7 8 9
4
5
6
7
8
9
=
12
1
1
21
31
22
40
6
00
60
12
l
EI
l
EIl
EAl
EI
l
EI
K A
−
−−−
−
−
−
−
=
2222
22
22
32
22
32
22
2222
22
22
32
22
32
22
460
260
6120
6120
0000
260
460
6120
6120
0000
l
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EIl
EA
l
EAl
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EIl
EA
l
EA
K B

108
BARRA C (Elemento con nudos rígidos): º0=α l2 = 0.75 m
g.d.l. 7 8 9 10 11 12
7
8
9
10
11
12
BARRA D (Elemento con nudos rígidos): º90=α l1 = 0.7 m
g.d.l 10 11 12
10
11
12
Las barras E y F están articulados en el nudo 3 por lo que no transmiten momento.
Por eso las submatrices de rigidez correspondientes a estas barras sólo tienen
componentes para los grados de libertad 7 y 8.
=
12
1
1
21
31
44
40
6
00
60
12
l
EI
l
EIl
EAl
EI
l
EI
K D
−
−−−
−
−
−
−
=
2222
22
22
32
22
32
22
2222
22
22
32
22
32
22
460
260
6120
6120
0000
260
460
6120
6120
0000
l
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EIl
EA
l
EAl
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EIl
EA
l
EA
K C

109
+
−+−−
+−
−+
++−−+−−
−−−+++−
−+
−+
−+
2
1
1
122
12
1
1
2
122
1
22
1
1
132
122
132
1
21
131
1
2
1
2
1
2
122
1
2
1
2
1
2
122
1
22
132
132
12
3
232
1
3
222
132
1
2
1
3
2
2
12
3
2
2
1
2
1
2
122
1
2
1
1
122
12
1
1
22
132
122
132
1
1
1
2
12
1
1
2
13
1
1
4466260000
6120
6120000
60
1200000
260
4400
260
61200
12sin
212))sin()cos(sin(cos
6120
000))sin()cos(sin(coscos2
00
00026
04466
000612
0612
0
000006
012
l
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EI
l
EA
l
EI
l
EI
l
EIl
EI
l
EI
l
EA
l
EAl
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EA
l
EI
l
EA
l
EI
l
EIl
EA
l
EA
l
EA
l
EA
l
EA
l
EAl
EI
l
EI
l
EI
l
EI
l
EI
l
EIl
EI
l
EI
l
EI
l
EI
l
EAl
EA
l
EI
l
EA
l
EI
ααααα
ααααα
BARRA E (Elemento con nudos articulados): º43=α l3 = 1.0 m
g.d.l 7 8
7
8
BARRA F (Elemento con nudos articulados): º43−=α l3 = 1.0 m
g.d.l 7 8
7
8
Por último, para componer la matriz de rigidez global sumamos cada uno de los
componentes que forman las submatrices y que pertenecen al mismo grado de
libertad.
g.d.l 4 5 6 7 8 9 10 11 12
4
5
6
7
8
9
10
11
12
=
ααα
ααα
2
33
3
2
333
sinsincos
sincoscos
l
EA
l
EAl
EA
l
EA
K E
=
ααα
ααα
2
33
3
2
333
sinsincos
sincoscos
l
EA
l
EAl
EA
l
EA
K F

110
Por último debemos determinar los vectores de cargas paca cada nudo. En nuestro
caso el único nudo en el que estamos aplicando una carga es el nudo 4, en
dirección –x. Por tanto los vectores de carga quedarán como siguen:
=
0
0
02P
=
0
0
03P
−
=
0
04
P
P
Para resolver el sistema de ecuaciones utilizaremos un pequeño programa en
Matlab que nos dará la solución del desplazamiento en dirección x del nudo 3 para
diferentes valores de la carga P a fin de poder compararlo con el resultado
experimental.
Para una carga de 3000 N se obtuvo un desplazamiento horizontal del nudo 3 de
0.0278317 mm. Si representamos el desplazamiento en función de la carga aplicada
tendremos:
Desplazamiento Teórico del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,005 0,01 0,015 0,02 0,025 0,03
Desplazamiento (mm)
Fu
erz
a (
N)
El desplazamiento vertical teórico, pese a ser muy pequeño no es nulo sino de
0.0006139 mm hacia abajo, al contrario que para la estructura de nudos
articulados.

111
4. Resolución mediante un modelo en ANSYS
A la hora de comparar los resultados experimentales con los obtenidos mediante el
método matricial dado por la teoría de estructuras, puede resultarnos de gran
ayuda obtener una tercera solución en caso de que haya diferencias importantes
entre unos resultados y otros. Por ello hemos realizado un modelo mediante el
programa de elementos finitos ANSYS.
Para su realización se han utilizado elementos viga BEAM3 para los pilares y el
dintel, y elementos LINK1 para los dos largueros. Asimismo el mallado es sencillo
pues la estructura no presenta ninguna complicación.
La forma de la deformada obtenida es la siguiente:

112
También en Ansys hemos resuelto para varias cargas a fin de poder comparar los
resultados con los otros procedimientos.
Para una carga de 3000 N se obtuvo un desplazamiento máximo de 0.028317 mm.
Si representamos el desplazamiento en función de la carga aplicada tendremos:
Desplazamiento del nudo 3 previsto por el modelo en ANSYS
0
500
1000
1500
2000
2500
3000
3500
0 0,005 0,01 0,015 0,02 0,025 0,03
Desplazamiento (mm)
Fu
erz
a (
N)
El desplazamiento vertical previsto por el modelo en ANSYS es de 0.00051975 mm
hacia abajo, que también es un valor pequeño pero no nulo.
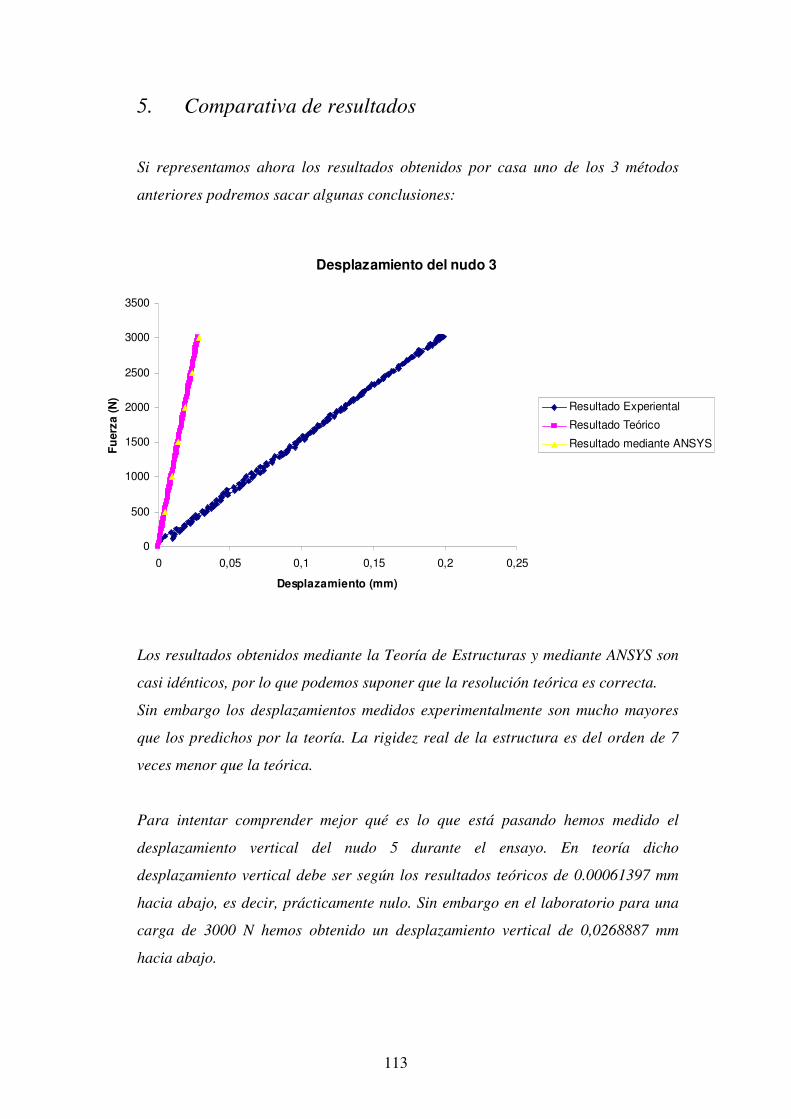
113
5. Comparativa de resultados
Si representamos ahora los resultados obtenidos por casa uno de los 3 métodos
anteriores podremos sacar algunas conclusiones:
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Resultado Experiental
Resultado Teórico
Resultado mediante ANSYS
Los resultados obtenidos mediante la Teoría de Estructuras y mediante ANSYS son
casi idénticos, por lo que podemos suponer que la resolución teórica es correcta.
Sin embargo los desplazamientos medidos experimentalmente son mucho mayores
que los predichos por la teoría. La rigidez real de la estructura es del orden de 7
veces menor que la teórica.
Para intentar comprender mejor qué es lo que está pasando hemos medido el
desplazamiento vertical del nudo 5 durante el ensayo. En teoría dicho
desplazamiento vertical debe ser según los resultados teóricos de 0.00061397 mm
hacia abajo, es decir, prácticamente nulo. Sin embargo en el laboratorio para una
carga de 3000 N hemos obtenido un desplazamiento vertical de 0,0268887 mm
hacia abajo.
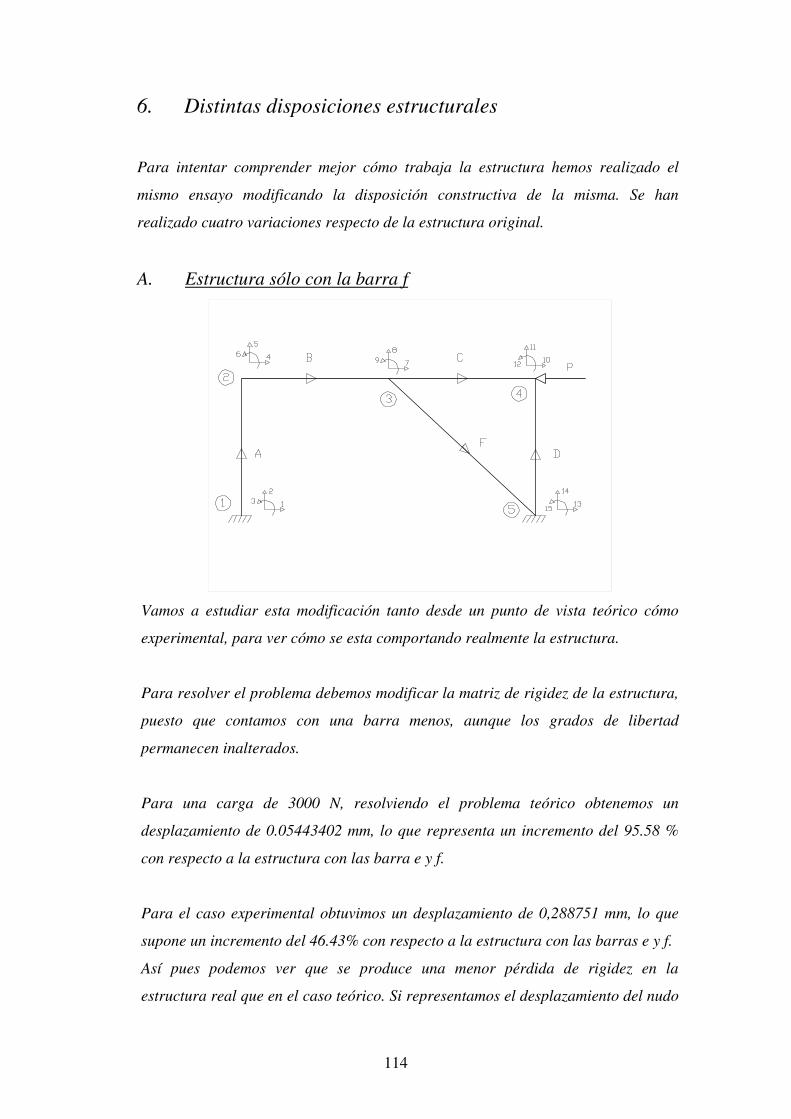
114
6. Distintas disposiciones estructurales
Para intentar comprender mejor cómo trabaja la estructura hemos realizado el
mismo ensayo modificando la disposición constructiva de la misma. Se han
realizado cuatro variaciones respecto de la estructura original.
A. Estructura sólo con la barra f
Vamos a estudiar esta modificación tanto desde un punto de vista teórico cómo
experimental, para ver cómo se esta comportando realmente la estructura.
Para resolver el problema debemos modificar la matriz de rigidez de la estructura,
puesto que contamos con una barra menos, aunque los grados de libertad
permanecen inalterados.
Para una carga de 3000 N, resolviendo el problema teórico obtenemos un
desplazamiento de 0.05443402 mm, lo que representa un incremento del 95.58 %
con respecto a la estructura con las barra e y f.
Para el caso experimental obtuvimos un desplazamiento de 0,288751 mm, lo que
supone un incremento del 46.43% con respecto a la estructura con las barras e y f.
Así pues podemos ver que se produce una menor pérdida de rigidez en la
estructura real que en el caso teórico. Si representamos el desplazamiento del nudo
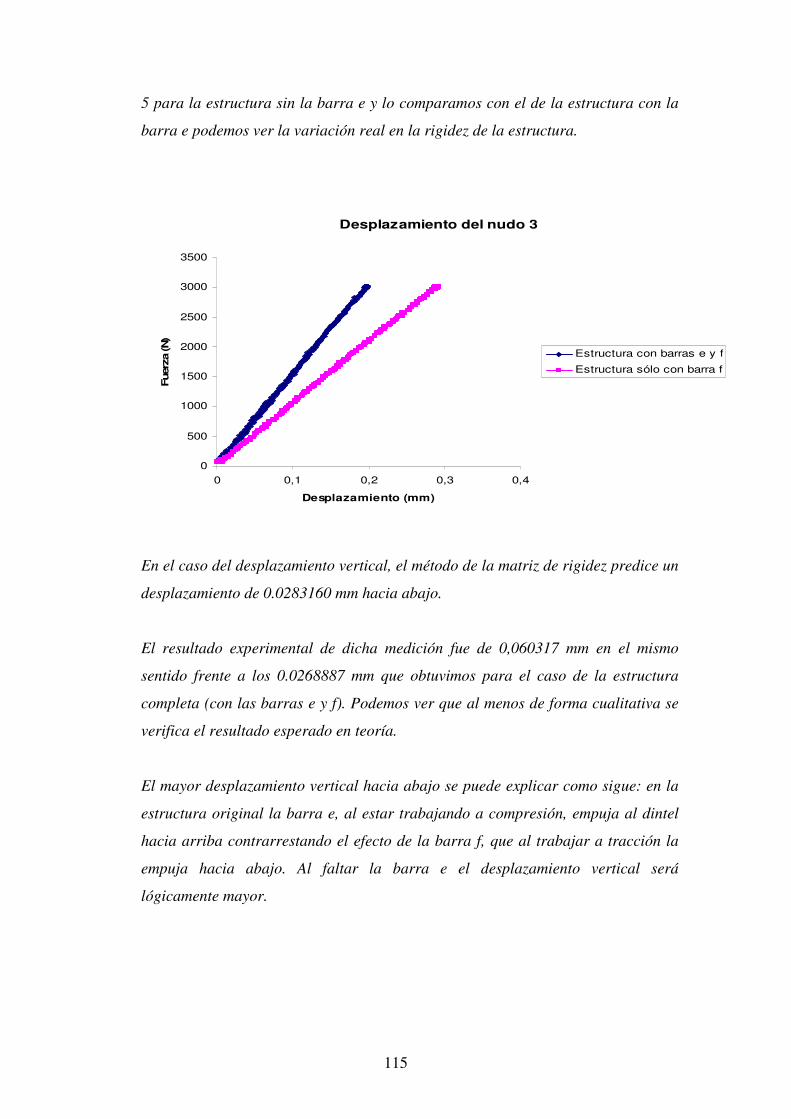
115
5 para la estructura sin la barra e y lo comparamos con el de la estructura con la
barra e podemos ver la variación real en la rigidez de la estructura.
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,1 0,2 0,3 0,4
Desplazamiento (mm)
Fuerz
a (N)
Estructura con barras e y f
Estructura sólo con barra f
En el caso del desplazamiento vertical, el método de la matriz de rigidez predice un
desplazamiento de 0.0283160 mm hacia abajo.
El resultado experimental de dicha medición fue de 0,060317 mm en el mismo
sentido frente a los 0.0268887 mm que obtuvimos para el caso de la estructura
completa (con las barras e y f). Podemos ver que al menos de forma cualitativa se
verifica el resultado esperado en teoría.
El mayor desplazamiento vertical hacia abajo se puede explicar como sigue: en la
estructura original la barra e, al estar trabajando a compresión, empuja al dintel
hacia arriba contrarrestando el efecto de la barra f, que al trabajar a tracción la
empuja hacia abajo. Al faltar la barra e el desplazamiento vertical será
lógicamente mayor.
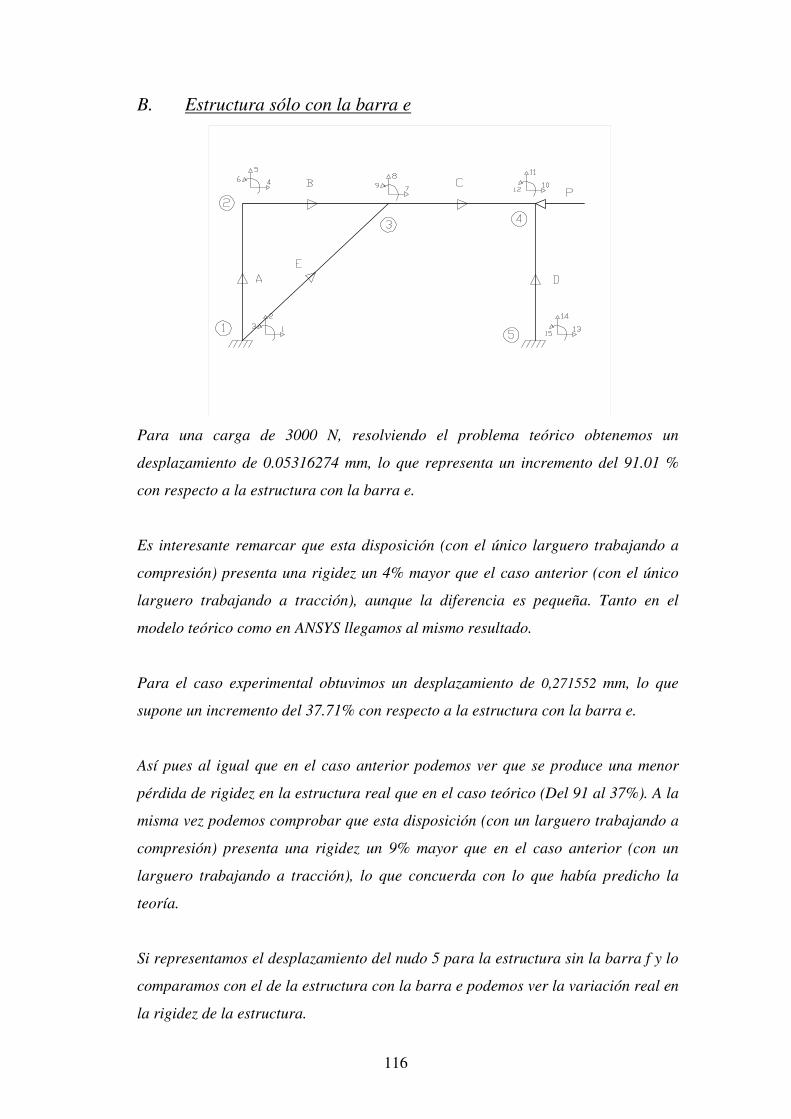
116
B. Estructura sólo con la barra e
Para una carga de 3000 N, resolviendo el problema teórico obtenemos un
desplazamiento de 0.05316274 mm, lo que representa un incremento del 91.01 %
con respecto a la estructura con la barra e.
Es interesante remarcar que esta disposición (con el único larguero trabajando a
compresión) presenta una rigidez un 4% mayor que el caso anterior (con el único
larguero trabajando a tracción), aunque la diferencia es pequeña. Tanto en el
modelo teórico como en ANSYS llegamos al mismo resultado.
Para el caso experimental obtuvimos un desplazamiento de 0,271552 mm, lo que
supone un incremento del 37.71% con respecto a la estructura con la barra e.
Así pues al igual que en el caso anterior podemos ver que se produce una menor
pérdida de rigidez en la estructura real que en el caso teórico (Del 91 al 37%). A la
misma vez podemos comprobar que esta disposición (con un larguero trabajando a
compresión) presenta una rigidez un 9% mayor que en el caso anterior (con un
larguero trabajando a tracción), lo que concuerda con lo que había predicho la
teoría.
Si representamos el desplazamiento del nudo 5 para la estructura sin la barra f y lo
comparamos con el de la estructura con la barra e podemos ver la variación real en
la rigidez de la estructura.

117
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,05 0,1 0,15 0,2 0,25 0,3
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sólo con barra e
Y si representamos las tres disposiciones constructivas podemos observar cómo la
estructura con la barra e presenta una rigidez ligeramente superior a la de la
estructura con la barra f.
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sólo con barra f
Estructura sólo con barra e
En el caso del desplazamiento vertical del nudo 3 para la estructura sólo con la
barra e se obtiene que éste debería ser de 0.02553660 mm hacia arriba. Es decir,
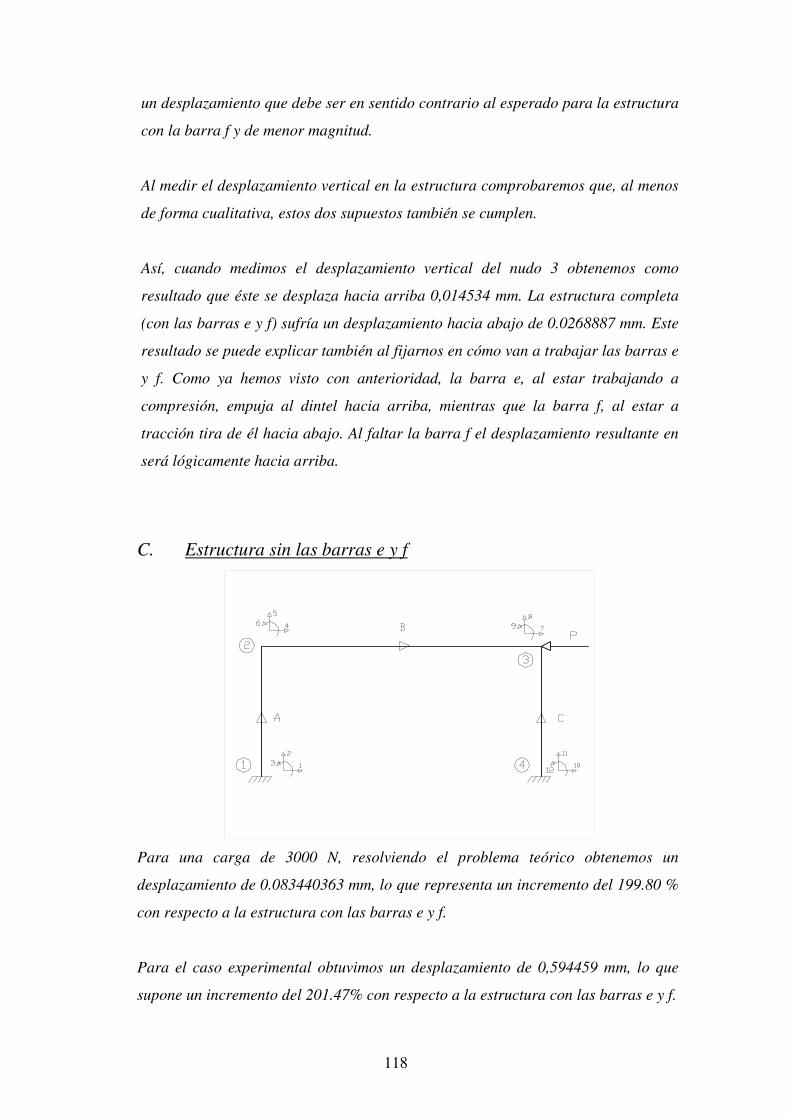
118
un desplazamiento que debe ser en sentido contrario al esperado para la estructura
con la barra f y de menor magnitud.
Al medir el desplazamiento vertical en la estructura comprobaremos que, al menos
de forma cualitativa, estos dos supuestos también se cumplen.
Así, cuando medimos el desplazamiento vertical del nudo 3 obtenemos como
resultado que éste se desplaza hacia arriba 0,014534 mm. La estructura completa
(con las barras e y f) sufría un desplazamiento hacia abajo de 0.0268887 mm. Este
resultado se puede explicar también al fijarnos en cómo van a trabajar las barras e
y f. Como ya hemos visto con anterioridad, la barra e, al estar trabajando a
compresión, empuja al dintel hacia arriba, mientras que la barra f, al estar a
tracción tira de él hacia abajo. Al faltar la barra f el desplazamiento resultante en
será lógicamente hacia arriba.
C. Estructura sin las barras e y f
Para una carga de 3000 N, resolviendo el problema teórico obtenemos un
desplazamiento de 0.083440363 mm, lo que representa un incremento del 199.80 %
con respecto a la estructura con las barras e y f.
Para el caso experimental obtuvimos un desplazamiento de 0,594459 mm, lo que
supone un incremento del 201.47% con respecto a la estructura con las barras e y f.

119
Así pues podemos ver que se produce casi la misma pérdida de rigidez en la
estructura real que en el caso teórico.
Al representar el desplazamiento del nudo 3 para la estructura sin las barras e y f y
lo comparamos con el de la estructura con las barras e y f podemos ver la variación
real en la rigidez de la estructura.
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura sin barras e y f
Ahora vamos a estudiar el desplazamiento vertical del nudo 3. El modelo creado
mediante ANSYS nos da un valor de del mismo de 0.0013190 mm hacia abajo, es
decir, un valor muy próximo a cero.
Al medir en el laboratorio el desplazamiento vertical para este caso hemos
obtenido que éste es igual a 0,0118697 mm, que aún siendo un valor pequeño, es
bastante mayor que el teórico. Sin embargo, al compararlo al medido en la
estructura con las barras e y f, que era de 0.0268887 mm podemos observar que ha
disminuido considerablemente.
La conclusión que podemos obtener al analizar el desplazamiento vertical del nudo
3 para cada uno de los 4 casos estudiados es que por algún defecto constructivo la
estructura al ser cargada sufre un desplazamiento vertical negativo (hacia abajo).
120
Así, en los dos casos en que el mismo debería ser muy próximo a cero (en la
estructura con las barras e y f, y en la estructura sin ellas), éste sale negativo. En el
caso en que el desplazamiento debería ser positivo (en la estructura sólo con la
barra e a compresión) resulta ser positivo pero en menor medida que lo que indica
la teoría, y en el caso contrario (en la estructura sólo con la barra f a tracción)
resulta ser negativo y en mayor medida que lo que indicaba la teoría.
D. Estructura con barras e y f dobles
Para concluir se ha realizado una última modificación estructural para conseguir
nuevamente la simetría dentro del plano de la estructura, añadiendo dos nuevas
barras e y f en el lado opuesto a las ya existentes.
Por lo tanto con estas nuevas barras pretendemos comprobar el efecto en el
comportamiento de la estructura motivado por esta falta de simetría.
El problema teórico lo obtendremos a partir de la misma solución que para el caso
original, pero modificando el valor del área de las barras e y f, que pasará a ser el
doble.
El desplazamiento horizontal del nudo 3 previsto será pues de 0,01678475 mm,
mientras que el vertical en este caso será de 0.000344874 mm.
El desplazamiento horizontal medido en la estructura fue de 0,048690416 mm. Este
resultado, pesar de ser nuevamente superior al previsto por la teoría, está también
más próximo a ella. Al igual que ocurría en el caso articulado, al conseguir la
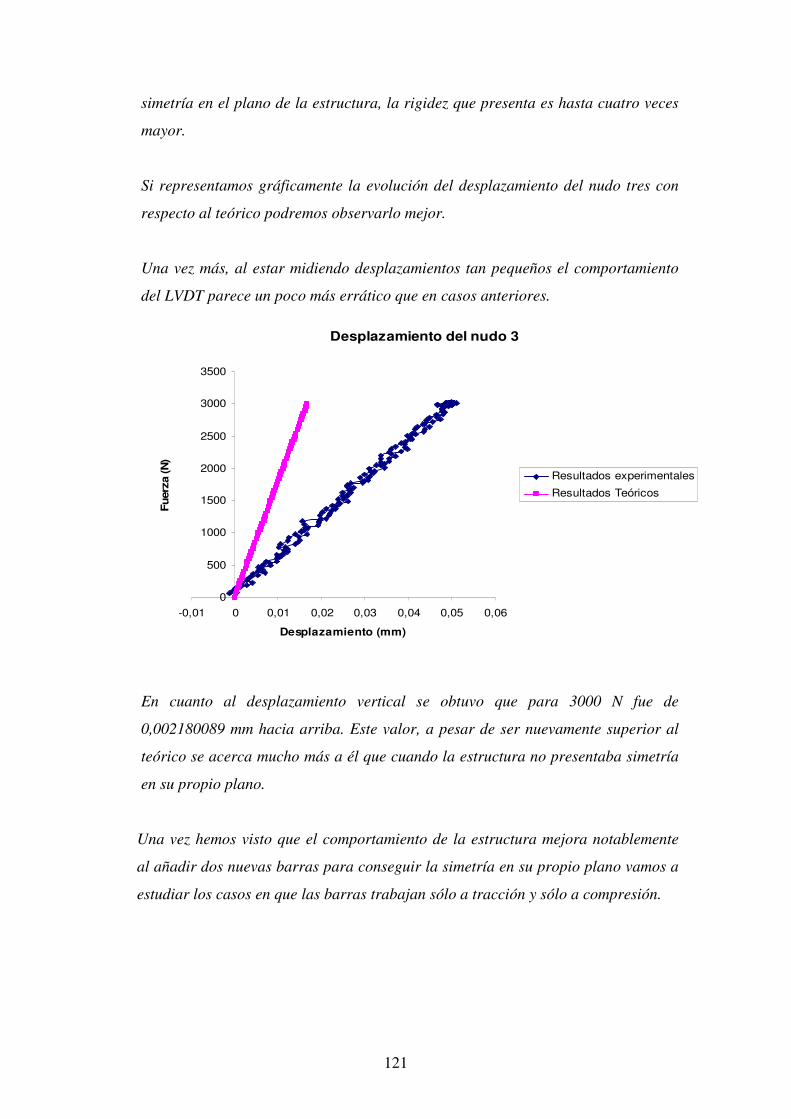
121
simetría en el plano de la estructura, la rigidez que presenta es hasta cuatro veces
mayor.
Si representamos gráficamente la evolución del desplazamiento del nudo tres con
respecto al teórico podremos observarlo mejor.
Una vez más, al estar midiendo desplazamientos tan pequeños el comportamiento
del LVDT parece un poco más errático que en casos anteriores.
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
-0,01 0 0,01 0,02 0,03 0,04 0,05 0,06
Desplazamiento (mm)
Fuerz
a (N
)
Resultados experimentales
Resultados Teóricos
En cuanto al desplazamiento vertical se obtuvo que para 3000 N fue de
0,002180089 mm hacia arriba. Este valor, a pesar de ser nuevamente superior al
teórico se acerca mucho más a él que cuando la estructura no presentaba simetría
en su propio plano.
Una vez hemos visto que el comportamiento de la estructura mejora notablemente
al añadir dos nuevas barras para conseguir la simetría en su propio plano vamos a
estudiar los casos en que las barras trabajan sólo a tracción y sólo a compresión.

122
E. Estructura sólo con barra f doble
Al estar trabajando con una estructura de nudos rígidos, aunque eliminemos la
barra e el problema teórico sigue teniendo solución, de forma que podremos
comparar los resultados experimentales con los teóricos.
Así, para una carga de 3000 N el desplazamiento horizontal previsto es de
0.048635242 mm mientras que el vertical es de 0.0338964 mm hacia abajo.
En cuanto a los resultados experimentales se obtuvo que para una carga de 3000 N
el desplazamiento horizontal es de 0,1775624 mm, que es un valor muy superior al
previsto por la teoría. Si lo comparamos con el que obtuvimos para la estructura
sin simetría en el plano (0,288751 mm) comprobamos que tan sólo se ha
conseguido aumentar la rigidez del conjunto en 1.6 veces, frente a las más de 4 del
caso anterior. En cuanto al desplazamiento vertical, se obtuvo que las barras f, que
trabajarán a tracción, tiran del dintel hasta que éste baja 0,065647319 mm, que sí
es un valor más próximo al previsto por la teoría, aunque ligeramente superior.
F. Estructura sólo con barra e doble
La teoría predice un desplazamiento horizontal para una carga de 3000 N de
0.0471481005 mm y un desplazamiento vertical de 0.031473323 mm hacia arriba.
Es interesante remarcar nuevamente que según nos dice la teoría de estructuras, el
desplazamiento horizontal previsto debe ser ligeramente menor (en torno a un 3%)
que en el caso anterior.

123
En cuanto a los resultados experimentales se obtuvo que el desplazamiento
horizontal medido fue de 0,17562449 mm, que vuelve a ser un valor muy superior
al teórico. Efectivamente este valor es ligeramente menor al medido en el caso
anterior (aproximadamente un 1%), lo cual estaría en concordancia con la teoría.
Si lo comparamos ahora con el que obtuvimos para la estructura sin simetría en el
plano (0,271552 mm) volvemos a comprobar que la rigidez del conjunto tan sólo
ha aumentado 1.5 veces.
En cuanto al desplazamiento vertical se obtuvo que las barras e, que trabajan a
compresión, empujan del dintel hasta que éste sube 0,068554185 mm, el cual
vuelve a ser un valor próximo al teórico.
La representación gráfica de los resultados obtenidos para los tres casos anteriores
es:
Desplazamiento del nudo 3
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura con barras e y f
Estructura con barra f
Estructura con barra e
Una vez más lo primero que nos llama la atención es la acusada pérdida de rigidez
de la estructura al eliminar alguna de las barras e o f, una pérdida muy superior a
la que sufría la estructura que no tenía simetría en el plano.

124
Además volvemos a comprobar que el comportamiento para la estructura con la
barra f y con la barra e es prácticamente idéntico, tanto para el desplazamiento
horizontal como el vertical, mientras que para la estructura sin simetría en el plano
sí que se podían apreciar notables diferencias para el desplazamiento horizontal y
muy especialmente en cuanto al desplazamiento vertical.
125
7. Conclusiones
A raíz de los resultados obtenidos podemos extraer algunas conclusiones, que en
muchos aspectos serán similares a las obtenidas en el estudio de la estructura
articulada.
Para la estructura sin simetría en su propio plano (barras e y f simples)
1º Al igual que ocurría para el caso articulado podemos admitir que la teoría de
estructuras no se está cumpliendo. Los desplazamientos horizontales previstos por
ella son superados en casi un orden de magnitud en todos los casos estudiados.
2º Aunque hemos comprobado que la teoría de estructuras no se cumple, sí que
también nos aporta una idea de cómo se va a comportar la estructura cuando la
ensayemos. Al igual que en el caso anterior la previsión de una drástica reducción
de rigidez al eliminar las barras e y f se ve corroborada experimentalmente, y
volvemos a comprobar que son las barras e y f las que están trabajando en mayor
medida.
3º El comportamiento de la estructura con una sola diagonal vuelve a no ser
independiente de si ésta trabaja a tracción o a compresión. Ambas disposiciones
presentan distintos desplazamientos horizontales y, sobretodo, verticales.
4º Al igual que pudimos observar en el caso articulado, hemos podido comprobar
que al someter a carga la estructura se produce un desplazamiento vertical
negativo de forma invariable, que se sumará al desplazamiento esperado para cada
uno de los casos estudiados.
5º Por último debemos descartar igualmente la existencia de asientos que
favorezcan un comportamiento anormal de la estructura ante cargas no muy
elevadas.
126
Para la estructura con simetría en su propio plano (barras e y f dobles)
1º El comportamiento de la estructura completa (con barras e y f), al igual que en el
caso articulado mejora sustancialmente con respecto a la estructura con falta de
simetría, acercándonos bastante a los valores teóricos de desplazamiento horizontal
y vertical.
2º Sin embargo, al eliminar alguna de las barras e o f la pérdida de capacidad
portante es muy acusada, que no se corresponde en modo alguno con la prevista
por la teoría de estructuras.
3º Una vez más la estructura se comportará de forma idéntica si trabaja con las
diagonales sólo a tracción o sólo a compresión, al contrario de lo que ocurría
cuando no existía simetría en el plano.
4º Por todo ello se puede concluir que para una estructura de nudos rígidos es
conveniente que ésta presente simetría dentro de su propio plano.

127
3. DIFERENCIAS DE COMPORTAMIENTO ENTRE
ARTICULADA - RÍGIDA
Para concluir este estudio vamos a comparar el comportamiento de los dos tipos de
estructuras, tanto desde un punto de vista teórico como experimental, para ver si la
diferencia teórica entre la estructura rígida y la articulada se ve reflejada también
experimentalmente.
Comenzaremos estudiando las diferencias para la estructura que no presenta
simetría dentro de su propio plano.
Resultados teóricos:
Para una carga de 3000 N en la estructura de nudos articulados se obtiene un
desplazamiento de 0,046382 mm, mientras que para la estructura de nudos rígidos
el desplazamiento es de 0,027831 mm. Esto supone que mediante la rigidización de
los nudos el desplazamiento previsto es un 40% menor que en el caso de nudos
articulados. Podemos ver esta reducción de forma gráfica:
Comparativa teórica Articulada - Rígida con diagonales simples
0
500
1000
1500
2000
2500
3000
3500
0 0,01 0,02 0,03 0,04 0,05
Estructura articulada
Estructura Rígida
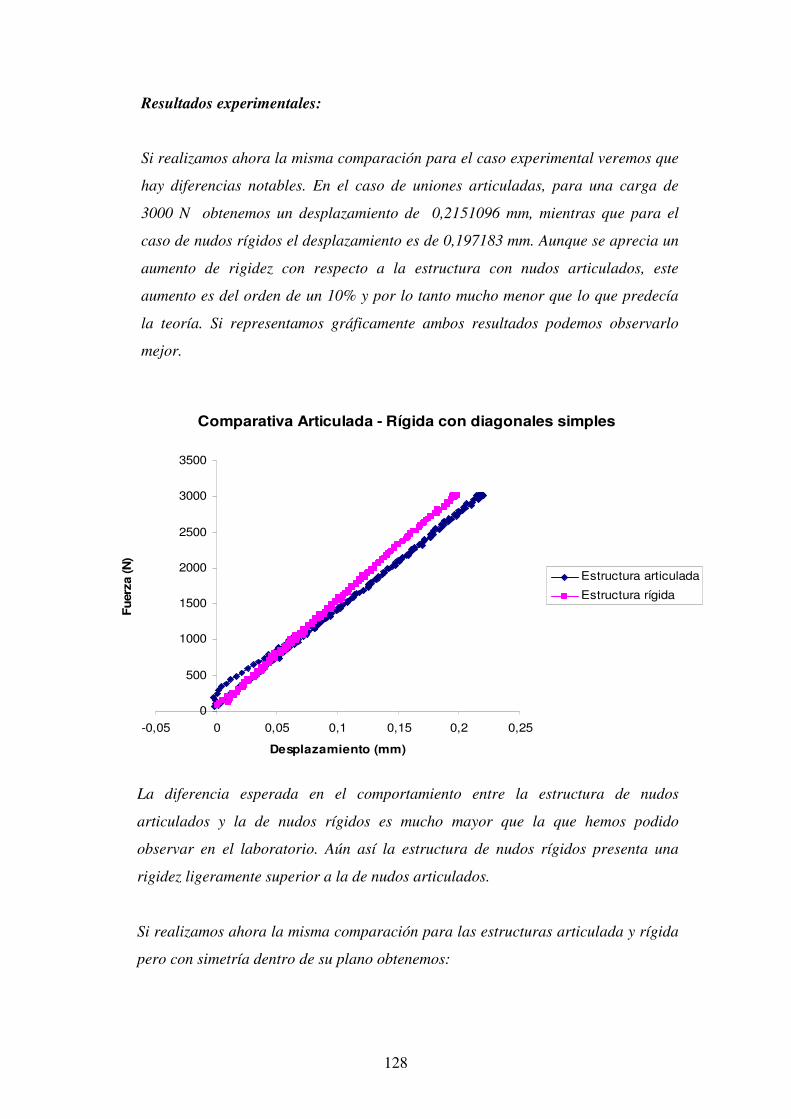
128
Resultados experimentales:
Si realizamos ahora la misma comparación para el caso experimental veremos que
hay diferencias notables. En el caso de uniones articuladas, para una carga de
3000 N obtenemos un desplazamiento de 0,2151096 mm, mientras que para el
caso de nudos rígidos el desplazamiento es de 0,197183 mm. Aunque se aprecia un
aumento de rigidez con respecto a la estructura con nudos articulados, este
aumento es del orden de un 10% y por lo tanto mucho menor que lo que predecía
la teoría. Si representamos gráficamente ambos resultados podemos observarlo
mejor.
Comparativa Articulada - Rígida con diagonales simples
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura articulada
Estructura rígida
La diferencia esperada en el comportamiento entre la estructura de nudos
articulados y la de nudos rígidos es mucho mayor que la que hemos podido
observar en el laboratorio. Aún así la estructura de nudos rígidos presenta una
rigidez ligeramente superior a la de nudos articulados.
Si realizamos ahora la misma comparación para las estructuras articulada y rígida
pero con simetría dentro de su plano obtenemos:
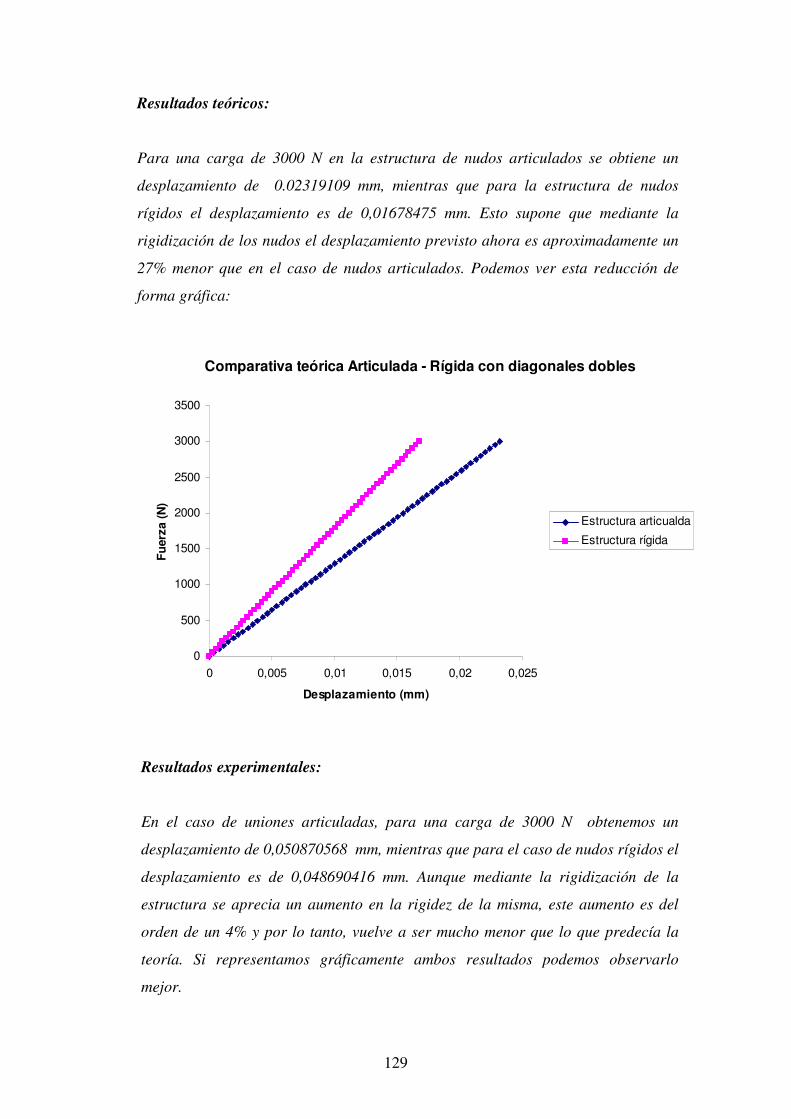
129
Resultados teóricos:
Para una carga de 3000 N en la estructura de nudos articulados se obtiene un
desplazamiento de 0.02319109 mm, mientras que para la estructura de nudos
rígidos el desplazamiento es de 0,01678475 mm. Esto supone que mediante la
rigidización de los nudos el desplazamiento previsto ahora es aproximadamente un
27% menor que en el caso de nudos articulados. Podemos ver esta reducción de
forma gráfica:
Comparativa teórica Articulada - Rígida con diagonales dobles
0
500
1000
1500
2000
2500
3000
3500
0 0,005 0,01 0,015 0,02 0,025
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura articualda
Estructura rígida
Resultados experimentales:
En el caso de uniones articuladas, para una carga de 3000 N obtenemos un
desplazamiento de 0,050870568 mm, mientras que para el caso de nudos rígidos el
desplazamiento es de 0,048690416 mm. Aunque mediante la rigidización de la
estructura se aprecia un aumento en la rigidez de la misma, este aumento es del
orden de un 4% y por lo tanto, vuelve a ser mucho menor que lo que predecía la
teoría. Si representamos gráficamente ambos resultados podemos observarlo
mejor.
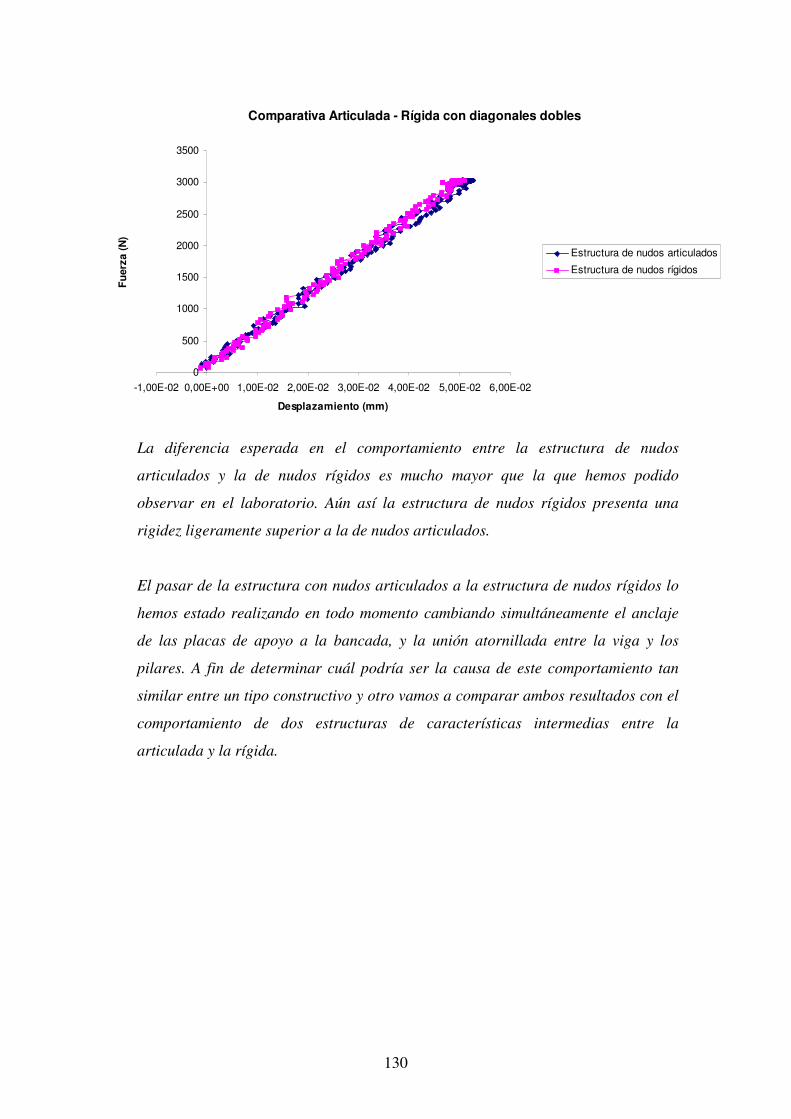
130
Comparativa Articulada - Rígida con diagonales dobles
0
500
1000
1500
2000
2500
3000
3500
-1,00E-02 0,00E+00 1,00E-02 2,00E-02 3,00E-02 4,00E-02 5,00E-02 6,00E-02
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura de nudos articulados
Estructura de nudos rígidos
La diferencia esperada en el comportamiento entre la estructura de nudos
articulados y la de nudos rígidos es mucho mayor que la que hemos podido
observar en el laboratorio. Aún así la estructura de nudos rígidos presenta una
rigidez ligeramente superior a la de nudos articulados.
El pasar de la estructura con nudos articulados a la estructura de nudos rígidos lo
hemos estado realizando en todo momento cambiando simultáneamente el anclaje
de las placas de apoyo a la bancada, y la unión atornillada entre la viga y los
pilares. A fin de determinar cuál podría ser la causa de este comportamiento tan
similar entre un tipo constructivo y otro vamos a comparar ambos resultados con el
comportamiento de dos estructuras de características intermedias entre la
articulada y la rígida.

131
A. Estructura de nudos articulados y apoyos rígidos
Para simular esta estructura mantuvimos los cuatro tornillos que sujetan la placa
de apoyo a la bancada del laboratorio y eliminamos dos de los cuatro tornillos que
unen el dintel al pilar en cada nudo.
El desplazamiento horizontal obtenido del nudo 3 fue de 0,196215 mm. Este es un
desplazamiento casi idéntico al obtenido para la estructura de nudos rígidos
(0,197183 mm) y sin embargo se aleja más del obtenido para la estructura de nudos
articulados (0,2151096 mm).
Esto nos puede indicar que el efecto de eliminar dos de los cuatro tornillos en la
unión entre viga y pilar es casi imperceptible, y que casi todo el efecto de
rigidización de la estructura es consecuencia del tipo de sujeción de la placa de
apoyo. Si representamos gráficamente los tres tipos constructivos podemos apreciar
mejor como la estructura con nudos articulados y apoyos rígidos se comporta casi
igual a la estructura totalmente rígida, y sin embargo se aleja más del
comportamiento de la estructura totalmente articulada.
Nudos articulados y apoyos rígidos
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura Articulada
Estructura rígida
Estructura de nudos
articulados y apoyos rígidos
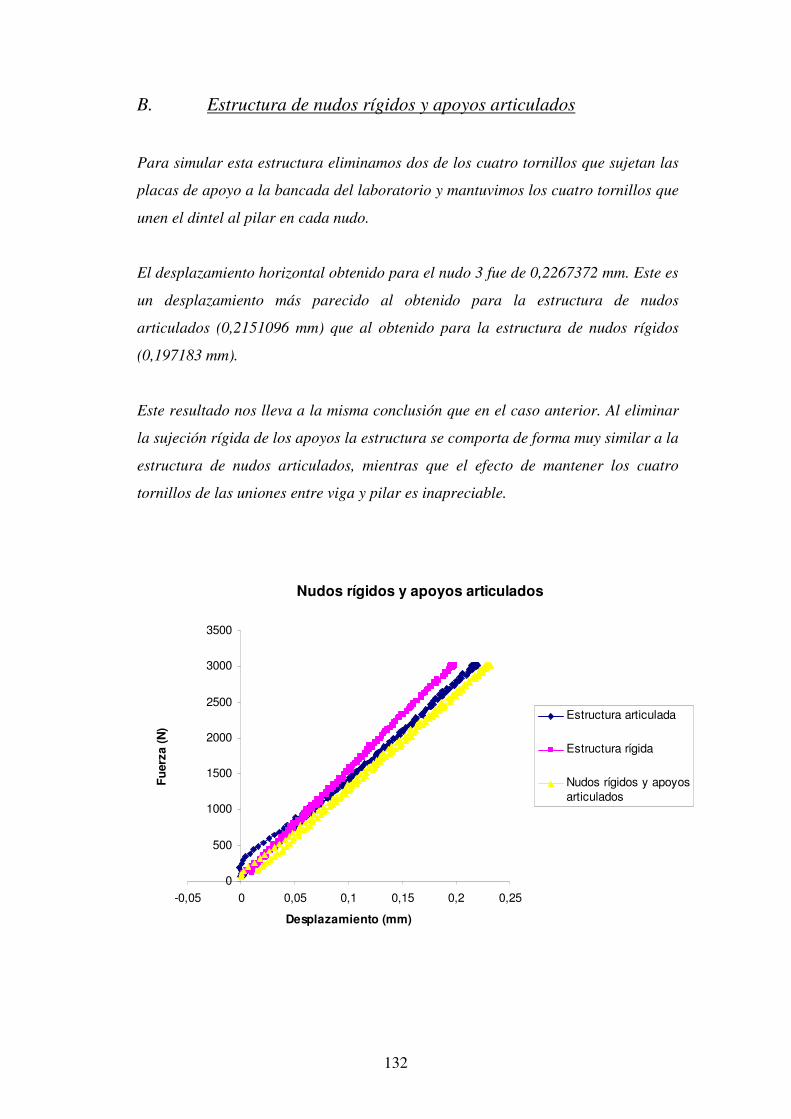
132
B. Estructura de nudos rígidos y apoyos articulados
Para simular esta estructura eliminamos dos de los cuatro tornillos que sujetan las
placas de apoyo a la bancada del laboratorio y mantuvimos los cuatro tornillos que
unen el dintel al pilar en cada nudo.
El desplazamiento horizontal obtenido para el nudo 3 fue de 0,2267372 mm. Este es
un desplazamiento más parecido al obtenido para la estructura de nudos
articulados (0,2151096 mm) que al obtenido para la estructura de nudos rígidos
(0,197183 mm).
Este resultado nos lleva a la misma conclusión que en el caso anterior. Al eliminar
la sujeción rígida de los apoyos la estructura se comporta de forma muy similar a la
estructura de nudos articulados, mientras que el efecto de mantener los cuatro
tornillos de las uniones entre viga y pilar es inapreciable.
Nudos rígidos y apoyos articulados
0
500
1000
1500
2000
2500
3000
3500
-0,05 0 0,05 0,1 0,15 0,2 0,25
Desplazamiento (mm)
Fu
erz
a (
N)
Estructura articulada
Estructura rígida
Nudos rígidos y apoyos
articulados
133
Conclusiones:
A partir de los resultados obtenidos podemos extraer las siguientes conclusiones:
1º La solución constructiva empleada para unir la viga a los pilares del pórtico no
es adecuada si queremos que ésta unión pueda trabajar como articulada o rígida
según sea nuestro deseo. El pasar de una sujeción mediante cuatro tornillos a una
mediante dos no hace que el comportamiento de la estructura sea distinto. Ambas
disposiciones hacen de ésta una unión rígida, que por lo tanto transmitirá momento.
2º La solución constructiva empleada para el anclaje de las placas de apoyo en el
caso articulado y rígido parece más adecuada, pues para ambas disposiciones el
comportamiento es distinto, si bien no tanto como predecía la teoría.
Para terminar vamos a mencionar alguna de las posibles causas que hacen que el
comportamiento real de la estructura esté muy lejos del comportamiento predicho
tanto por la teoría de estructuras como por los modelos realizados con ANSYS.
a) Movimiento relativo en las uniones viga-pilar.
Se medió mediante un LVDT el movimiento relativo que se produce entre la viga y
el pilar para ver si la unión atornillada genera un desplazamiento suplementario al
cargar la estructura. Efectivamente, para una carga de 3000 N se midió un
desplazamiento relativo entre ambos perfiles de 0,010174081 mm para la estructura
articulada, y de 0,009931865 mm para la rígida. Teniendo en cuenta que el
desplazamiento del nudo 3 esperado para la estructura articulada es de 0,046382
mm y para la estructura rígida de 0.0278317 mm, el movimiento relativo de la
unión entre viga y pilar supone un incremento del mismo de entre el 20-40%
134
b) Giro de las placas de apoyo.
Como ya hemos visto anteriormente la base de las placas de apoyo no hace un
contacto perfecto con la bancada, quedando huecos que se pueden apreciar a
simple vista entre ellos. Esto podría ocasionar que a la hora de aplicar carga la
placa de apoyo tuviese una cierta holgura para girar sobre si misma. Si esto se
produjese ocasionaría un incremento muy notable del desplazamiento horizontal del
dintel. Además, aún para las disposiciones constructivas en que el desplazamiento
vertical fuese nulo o muy próximo a cero este giro provocaría un desplazamiento
vertical negativo suplementario, como realmente ocurre.
c) Falta de simetría en el plano de la estructura.
Como hemos mencionado anteriormente, la falta de simetría en el plano de la
estructura puede ocasionar que al cargar la misma se induzcan unos esfuerzos en
la estructura que hagan que se salga de su plano, con lo que se generarían unos
desplazamientos añadidos que no estamos teniendo en cuenta en la teoría.
Así, hemos podido comprobar cómo al añadir dos nuevas barras a la estructura de
forma que ésta mantenga la simetría en el plano, los desplazamientos medidos son
mucho menores, acercándonos bastante más que antes a los teóricos.
d) Imperfecciones constructivas.
Dado el orden de magnitud de los desplazamientos que hemos tenido que medir
(centésimas de milímetro), cualquier pequeña imperfección constructiva en la
estructura hace que los desplazamientos que se producen al cargar la misma sean
mayores a los teóricos.
135
e) Imperfecciones en la medida.
Estos mismos desplazamientos, al ser tan pequeños, resultan difíciles de medir con
el equipo disponible en el laboratorio sin que se produzcan errores que sean de un
orden de magnitud cercano al de los que estamos midiendo.
Por lo tanto, con el fin de poder realizar un estudio más estricto sobre el
comportamiento de una estructura en el laboratorio sería conveniente intentar
mitigar alguna de estas causas, o bien realizar una construcción que presentase
mucha menor rigidez que la actual, de forma que estas pequeñas imperfecciones
que en este caso pueden llegar a ser del mismo orden de magnitud que los
desplazamientos que estamos midiendo, sean despreciables respecto a los
esperados para la nueva estructura.
136
6. DISEÑO DE UNA NUEVA ESTRUCTURA
ARTICULADA - RÍGIDA
Como ya hemos explicado anteriormente, la estructura articulada-rígida que hemos
ensayado con el fin de observar las diferencias de comportamiento entre un tipo
constructivo y otro no presentaba las mejores condiciones para este estudio, pues
no fue concebida para este propósito. Como consecuencia de ello los resultados
obtenidos de los ensayos distan considerablemente de los esperados. Por eso se ha
decidido diseñar una nueva estructura cuyo comportamiento se aproxime mejor al
predicho por la teoría de estructuras.
Para conseguirlo, la siguiente estructura debe presentar las siguientes
características:
• Menor rigidez que la estructura estudiada.
• Mejorar las articulaciones de los nudos.
• Posibilidad de transformar los nudos articulados a rígidos.
• Debe ser simétrica en su propio plano.
Para conseguir estos objetivos se ha concebido una nueva estructura que presenta
ciertas diferencias con respecto a la anterior, como pueden ser la disposición de las
diagonales, que trabajarán sólo a tracción, la forma en que se materializan las
uniones entre barras, o los perfiles utilizados para construirla. Además se han
reducido las dimensiones globales de la estructura con el fin de liberar barras y
espacio de la bancada del laboratorio.
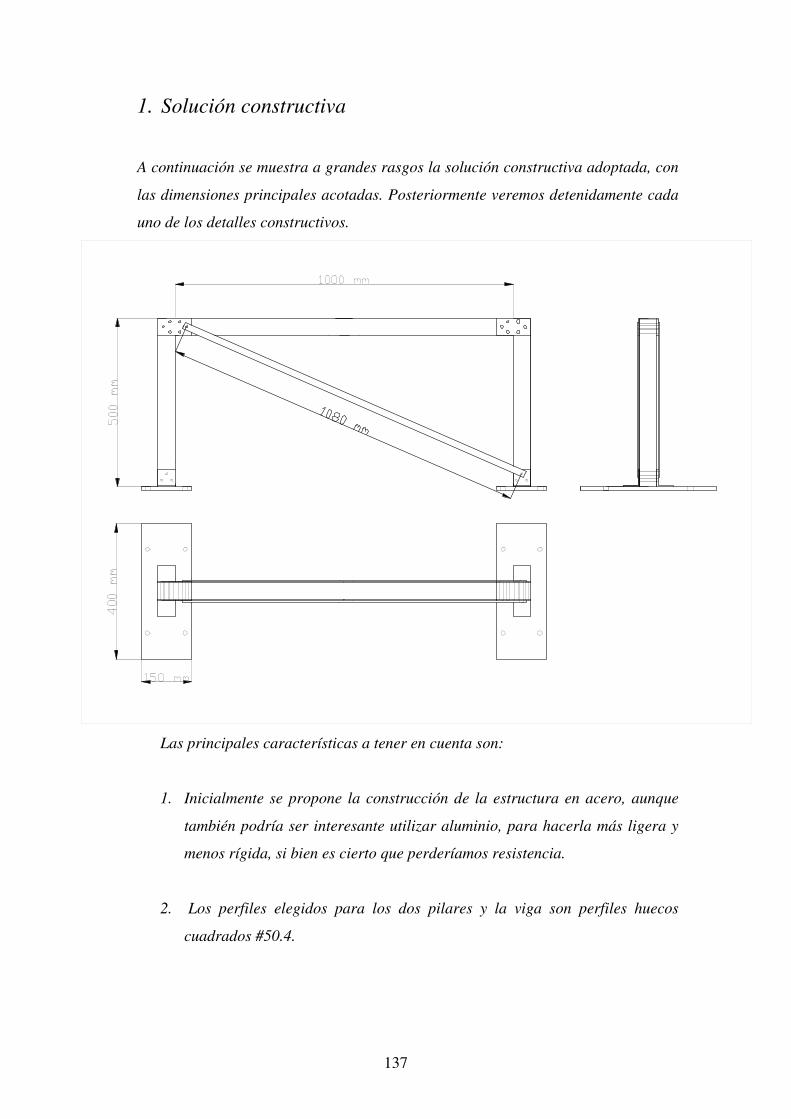
137
1. Solución constructiva
A continuación se muestra a grandes rasgos la solución constructiva adoptada, con
las dimensiones principales acotadas. Posteriormente veremos detenidamente cada
uno de los detalles constructivos.
Las principales características a tener en cuenta son:
1. Inicialmente se propone la construcción de la estructura en acero, aunque
también podría ser interesante utilizar aluminio, para hacerla más ligera y
menos rígida, si bien es cierto que perderíamos resistencia.
2. Los perfiles elegidos para los dos pilares y la viga son perfiles huecos
cuadrados #50.4.

138
3. Los perfiles elegidos para las diagonales son pletinas de dimensiones 20x0.7
mm. Se ha decidido incluir dos diagonales (una a cada lado) para
asegurarnos la simetría con respecto al plano de la estructura.
4. Las uniones serán articuladas, si utilizamos un único tornillo en cada una de
ellas, o bien rígidas si utilizamos tres tornillos en cada una de ellas.
5. La unión entre viga y pilar se realiza a través de dos plaquitas atornilladas
a ambas barras.
6. Los pilares se sujetan a las placas de apoyo a través de unos angulares
soldados a estas y atornillados a los pilares.
A continuación vamos a detallar una por una las uniones entre barras y el
anclaje del nuevo diseño.

139
2. Detalles constructivos
a. Unión viga- pilar
Como ya hemos comentado anteriormente, la unión entre la viga y los pilares se
realizará a través de unas plaquitas de dimensiones 50x100 y 5 mm de espesor,
atornilladas a los extremos de los pilares y el dintel. Así pues, para simular la
unión articulada utilizaríamos tan sólo dos tornillos, mientras que para simular
la unión rígida utilizaríamos seis.
b. Unión placa de apoyo – pilar
Cada uno de los pilares de la estructura estará sujeto a la placa de apoyo a
través de dos angulares soldados a la misma de dimensiones 50x50x50 mm y 5
mm de espesor. Ambos angulares deberán guardar una distancia entre sí de 50
mm para que entre ellos se pueda alojar el pilar. Así pues, los pilares irán
atornillados a los angulares, bien mediante un único tornillo para las uniones
articuladas, o bien mediante tres tornillos para las uniones rígidas.
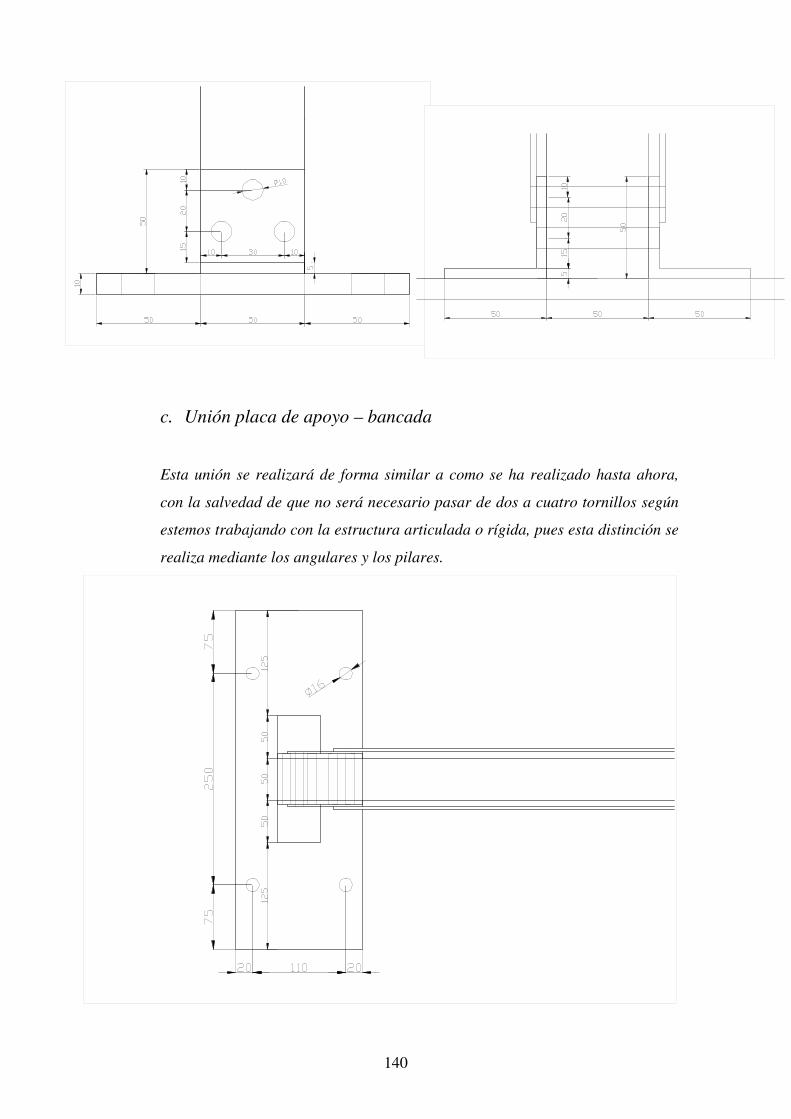
140
c. Unión placa de apoyo – bancada
Esta unión se realizará de forma similar a como se ha realizado hasta ahora,
con la salvedad de que no será necesario pasar de dos a cuatro tornillos según
estemos trabajando con la estructura articulada o rígida, pues esta distinción se
realiza mediante los angulares y los pilares.
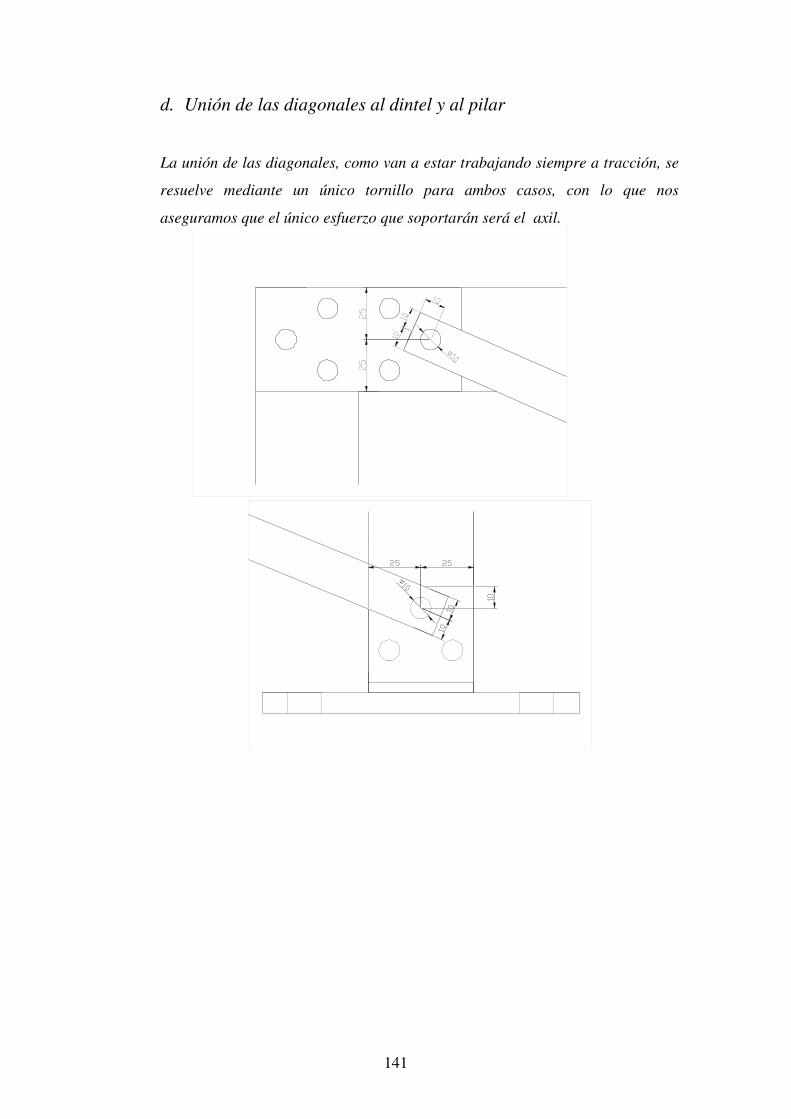
141
d. Unión de las diagonales al dintel y al pilar
La unión de las diagonales, como van a estar trabajando siempre a tracción, se
resuelve mediante un único tornillo para ambos casos, con lo que nos
aseguramos que el único esfuerzo que soportarán será el axil.

142
3. Estudio de resistencia de la estructura
Como justificación de los perfiles y material elegidos para la construcción de la
estructura y con objeto de asegurarnos que la nueva estructura soportará las
solicitaciones a las que se va a ver sometida en el transcurso de las distintas
prácticas de teoría de estructuras, vamos a realizar un pequeño estudio para
comprobar la resistencia de la estructura ante la carga de ensayo que le vamos a
aplicar con el equipo de MTS, que será de 3000 N y en la dirección que indica la
figura..
a. Diagonales
Como ya hemos visto anteriormente, las dos diagonales de la estructura son
pletinas de dimensiones 20x0.7mm. Sus características principales son:
L = 1.135 m A = 0.14 cm2
Las diagonales van a estar sometidas únicamente a tracción, siendo el axil máximo
que deberán soportar de 3354 N por lo que las pletinas se van a ver sometidas a
una tensión de:
MPaA
Ne 78.119==σ
Al disponer dos diagonales soportando el esfuerzo axil, el área resistente será el
doble del de la pletina.
Podemos comprobar que las diagonales se encontrarán a la mitad de su límite
elástico.

143
b. Dintel
Como ya hemos visto anteriormente, el dintel de la estructura esta construido con
un perfil cuadrado hueco #50.4. Sus características principales son:
L = 1 m A = 5.81 cm2 I = 22.90 cm4
W = 9.15 cm3 i = 1.83 cm Ac = 2.905 cm2
En el caso del dintel debemos estudiar dos situaciones desfavorables.
Estructura articulada: N = -3000 N V = 0 N M = 0 N
Como el esfuerzo axil es de compresión empezaremos por obtener el coeficiente de
pandeo de esta barra. Al estar biarticulada, β = 1. Por lo tanto la esbeltez de
obtenida es:
64.54=⋅
=i
Lβλ
Si nos vamos a las tablas de coeficientes de pandeo obtenemos que para una
esbeltez de 54.64 ω = 1,17. Por lo tanto, la tensión que va a soportar el dintel en
este caso es
MPaA
N04.6=⋅= ωσ
Por lo que nos encontraremos muy lejos del límite elástico.
Estructura de nudos rígidos sin diagonales:
NN 1488−= NV 561= NmM 279=
Para ver si el perfil elegido resistirá estos esfuerzos deberemos calcular la tensión
equivalente a la que estará sometido el dintel.

144
Comenzaremos por obtener el coeficiente de pandeo para este caso. Al estar el
dintel biempotrado, β = 0.5. Por lo tanto la esbeltez de obtenida es:
32.27=⋅
=i
Lβλ
Si nos vamos a las tablas de coeficientes de pandeo obtenemos que para una
esbeltez de 27.32 ω = 1,03. Con esto ya podemos obtener la tensión normal y
tangencial, y a partir de estas la tensión equivalente que soportará el dintel en este
caso:
MPaW
M
A
N12.33=+⋅= ωσ MPa
A
V
c
93.1==τ
MPaeq 28.333 22 =⋅+= τσσ
Así pues el dintel se encontrará aún lejos del límite elástico.
c. Pilares
Los pilares de la estructura se van a construir, al igual que el dintel, con un perfil
cuadrado hueco de dimensiones 50x50x4. Sus características principales son:
L = 0.5 m A = 5.81 cm2 I = 22.90 cm4
W = 9.15 cm3 i = 1.83 cm Ac = 2.905 cm2
La situación más desfavorable para los pilares se dará para la estructura de nudos
rígidos y sin diagonales. En ese caso los pilares se ven sometidos a los siguientes
esfuerzos:
NN 561−= NV 1488= NmM 464=

145
Para ver si el perfil elegido resistirá estos esfuerzos deberemos calcular la tensión
equivalente a la que estarán sometidos los pilares. Para ello comenzaremos por
obtener el coeficiente de pandeo. Se trata de una barra biempotrada, por lo que
β = 0.5. Por lo tanto la esbeltez de obtenida es:
66.13=⋅
=i
Lβλ
Se trata de una esbeltez tan pequeña que podemos considerar ω = 1. Con esto ya
podemos obtener la tensión normal y tangencial, y a partir de estas la tensión
equivalente que soportarán los pilares:
MPaW
M
A
N67.51=+⋅= ωσ MPa
A
V
c
12.5==τ
MPaeq 42.523 22 =⋅+= τσσ
Como podemos observar, al igual que ocurre con el dintel, los pilares se encuentran
lejos de alcanzar el límite elástico. Por lo tanto podemos concluir que para la carga
de ensayo prevista ( 3000 N ) la estructura debe resistir sin problemas, siendo las
barras más solicitadas las diagonales, que soportarán una tensión del orden de la
mitad del límite elástico.

146
4. Desplazamiento horizontal previsto
Para terminar vamos a calcular los desplazamientos horizontales previstos para
una carga de ensayo de 3000 N, que es la carga de diseño de la estructura. Para
ello resolveremos los diferentes problemas mediante sus correspondientes modelos
en ANSYS.
Estructura articulada: uh = 0.71611 mm.
Estructura rígida con diagonales: uh = 0.31290 mm.
Estructura rígida sin diagonales: uh = 0.56336 mm.
Como podemos observar, el desplazamiento teórico horizontal de la nueva
estructura diseñada se ha visto incrementado con respecto al de la estructura
ensayada de forma muy considerable, pues de un desplazamiento para el caso
articulado de 0.046382 mm se ha pasado a uno de 0.71611 mm.
Por lo tanto mediante este diseño cumplimos con la última de las especificaciones
consideradas para la nueva estructura. Así pues sólo quedaría la construcción y
ensayo de la misma para poder verificar la conveniencia del diseño.

147
7. DISEÑO DE UN ÚTIL-PALANCA PARA EL
EQUIPO DEL LABORATORIO
Como ya se ha comentado anteriormente, el equipo de MTS que se encuentra en el
laboratorio dispone de dos servo-válvulas de 1000 Kg de capacidad. Aunque para
ensayos dinámicos esta carga es en principio suficiente, no lo es tanto para ensayos
estáticos de grandes elementos estructurales. Es por esto que se ha decidido diseñar
y construir un útil que nos permita incrementar la fuerza aplicada en los ensayos
mediante el principio de palanca.
Después de considerar varios posibles diseños, finalmente se decidió realizar el que
se explica a continuación, por su mayor ligereza y manejabilidad con respecto a
otros.
A continuación se expone a grandes rasgos el diseño del útil-palanca construido,
que se completará posteriormente con los cálculos realizados para su
dimensionado.

148
1. Diseño realizado
El mecanismo consistirá en una viga que girará sobre un eje o bulón. El eje
atravesará el alma de la viga en un punto elegido, de forma tal que la relación de
distancias entre un extremo y otro sea de 4/1. El bulón se encontrará sujeto
mediante dos orejetas a una placa de apoyo. La placa de apoyo se puede anclar a
cualquiera de los pilares situados en la bancada del laboratorio mediante cuatro
tornillos, de forma que podremos regular la altura del útil siempre que queramos.
Además se han soldado como refuerzo dos platabandas a ambos lados del perfil
HEB100 con lo que compensaremos el efecto de taladrar el alma del mismo.
La disposición constructiva del mecanismo es la siguiente
Se ha elegido una palanca de 1500 mm de longitud por ser ésta la longitud de la
bancada disponible en el laboratorio, con lo que cubrimos todo el rango de
posibilidades. La relación 4/1 viene determinada por la disposición de la bancada.

149
Usualmente la carga aplicada y la carga aumentada estarán alineadas según las
guías que usemos para anclar los pilares, como se muestra en la siguiente figura:
Así pues podremos obtener distintas relaciones de palanca (4/1, 3/1, 2/1, 1/1) según
sea la guía que en ese momento estemos utilizamos para anclar el pilar en el cual
esté situado el actuador.
Eventualmente, si nos encontramos con que el punto donde queremos la
multiplicación de la carga está situado justamente entre dos guías (como es el caso
de la estructura que ha servido para la memoria de este proyecto) las relaciones de
palanca se verán dobladas (8/1, 6/1, 4/1, 2/1), por lo que deberemos poner atención
a la hora de utilizar el mecanismo para que la suma de las cargas sobre el mismo
no supere la carga de diseño.
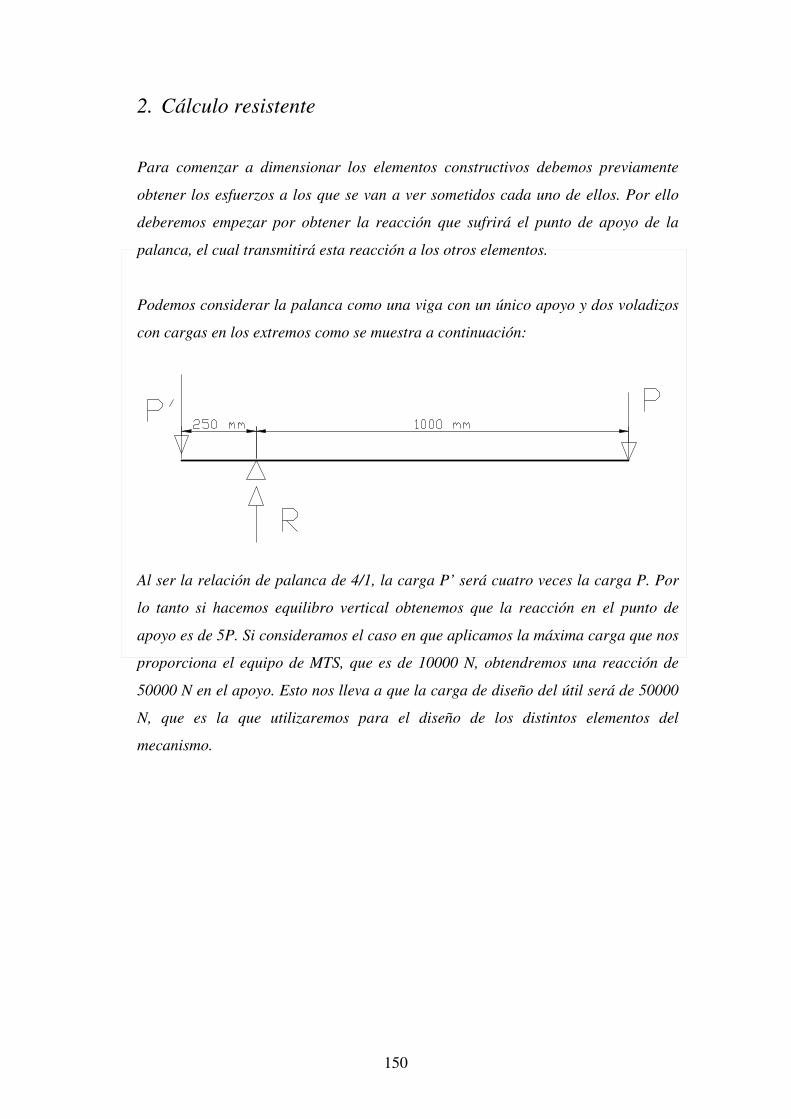
150
2. Cálculo resistente
Para comenzar a dimensionar los elementos constructivos debemos previamente
obtener los esfuerzos a los que se van a ver sometidos cada uno de ellos. Por ello
deberemos empezar por obtener la reacción que sufrirá el punto de apoyo de la
palanca, el cual transmitirá esta reacción a los otros elementos.
Podemos considerar la palanca como una viga con un único apoyo y dos voladizos
con cargas en los extremos como se muestra a continuación:
Al ser la relación de palanca de 4/1, la carga P’ será cuatro veces la carga P. Por
lo tanto si hacemos equilibro vertical obtenemos que la reacción en el punto de
apoyo es de 5P. Si consideramos el caso en que aplicamos la máxima carga que nos
proporciona el equipo de MTS, que es de 10000 N, obtendremos una reacción de
50000 N en el apoyo. Esto nos lleva a que la carga de diseño del útil será de 50000
N, que es la que utilizaremos para el diseño de los distintos elementos del
mecanismo.

151
a. Diseño del eje
Para el eje se ha decidido utilizar un bulón o tornillo de acero de alta resistencia de
diámetro 24 mm, cuyas características geométricas serán:
A = 4.52 cm2 I = 1.63 cm4 W = 1.35 cm3 MPae 1000=σ
La reacción de 50000 N se transmitirá al eje a través del alma del perfil HEB100,
por lo que para calcular el eje se utilizará como modelo una viga biempotrada con
carga en el centro, tal y como se muestra en la figura:
Así los esfuerzos que se generan en el eje y las tensiones que deberá soportar serán:
NmPL
M 8008
== NP
V 250002
==
MPaW
M59.592==σ MPa
A
V
c
309.55==τ
eeq MPaMPa στσσ =<=+= 100070.5993 22
Con lo que nos aseguramos que el diámetro elegido resistirá los esfuerzos previstos.

152
Realmente, al haber soldado sendas platabandas a ambos lados del perfil HEB100,
éste apoyará tanto en el centro del eje como en sus dos extremos, por lo que el
momento real sufrido por el mismo será incluso menor al calculado. Así pues al
aplicar la carga de diseño nos encontraremos todavía lejos del límite elástico del
eje.
b. Diseño de las orejetas
El eje va a transmitir a cada orejeta una carga de 25000 N en dirección axial, por
lo que deberemos dimensionarlas de forma que la sección más desfavorable de las
mismas soporte ese axil.
La orejeta tiene 1 cm de espesor, por lo que su sección más desfavorable tendrá un
área de 3 cm2.
eMPaMPaA
Nσσ =<== 25033.83
min
Como podemos comprobar las orejetas también resistirán los esfuerzos previstos.

153
c. Diseño de la placa de apoyo
La placa de apoyo debe soportar las cargas que le transmitirán las dos orejetas.
Para el diseño de la placa haremos una simplificación y la consideraremos como
una viga biempotrada tal y como muestra la figura.
Las características geométricas de la placa son:
A = 15 cm2 I = 1.25 cm4 W = 2.5 cm3
Y los esfuerzos y tensiones que deberá soportar son:
NmP
M 5.1122.0
03.0 2
=⋅
= NPV 25000==
MPaW
M45==σ MPa
A
V
c
66.16==τ
eeq MPaMPa στσσ =<=+= 25045.533 22
Así pues la placa de apoyo tampoco presentará problemas para resistir la carga de
diseño del mecanismo.

154
d. Diseño de la viga – palanca
Por último debemos comprobar que el perfil HEB100 que utilizaremos para
transmitir la fuerza amplificada soportará el momento flector al que se verá
sometido. Para la carga de diseño este momento flector es de 10000 Nm.
Las características geométricas del perfil HEB100 son:
A = 26 cm2 I = 450 cm4 W = 90 cm3
Por lo que la tensión máxima que soportará el perfil será:
eMPaMPaW
Mσσ =<== 25011.111
Al igual que ocurría en los casos anteriores tampoco para la palanca
sobrepasaremos el límite elástico.

155
3. Resultados del mecanismo – palanca
Para probar comportamiento del útil construido en el laboratorio se decidió
realizar un ensayo sobre la estructura objeto de estudio del presente proyecto.
Como al anclar la estructura a la bancada ésta queda entre dos guías, la relación
de multiplicación teórica que vamos a conseguir es 8/1. Para controlar el
comportamiento se añadió en el punto de aplicación de la carga una célula de
carga con la que medimos la fuerza obtenida a través del mecanismo, tal y como se
puede apreciar en la fotografía.

156
Una vez realizado el ensayo se comprueba que para una carga aplicada de 2000.86
N la estructura recibe una fuerza de 14747,30 N. Esto significa que la relación de
multiplicación no será exactamente 8/1, sino 7.37/1. Esta disminución en la relación
puede ser debida a la disipación de energía que en forma de rozamiento genera el
mecanismo.
Aún así, si observamos la representación gráfica de ambas fuerzas a lo largo del
ensayo podremos comprobar como el comportamiento del útil-palanca es
totalmente lineal, lo que nos lleva a concluir que el funcionamiento del mecanismo
es bastante bueno.
Relación entre Fuerza Aplicada y Multiplicación de la Fuerza
0
2000
4000
6000
8000
10000
12000
14000
16000
0 500 1000 1500 2000 2500
Fuerza Aplicada (N)
Mu
ltip
licació
n d
e l
a F
uerz
a (
N)

157
3. Conclusiones
Una vez hemos comprobado que el mecanismo diseñado resistirá los esfuerzos
máximos a los que se va a ver sometido y que funciona de forma más que aceptable,
resulta interesante obtener el coeficiente de seguridad de que disponemos para
hacernos una idea de hasta dónde es conveniente llegar con el mecanismo
diseñado.
Si nos fijamos en el elemento constructivo más solicitado, que es el eje, podemos
observar que disponemos de un coeficiente de seguridad de:
66.1599
1000===
σ
σ eSF
Este coeficiente de seguridad no es muy elevado. Por ello, a la hora de utilizar el
mecanismo sería recomendable que no se sobrepase la carga de diseño para la cual
fue concebido.

158
8. CONCLUSIONES
Para terminar, y a modo de resumen, vamos a remarcar algunas de las
conclusiones principales que hemos podido extraer de la realización de este
proyecto.
En primer lugar debemos destacar las buenas cualidades que presenta el
Controlador FlexTest IIm para la realización de todo tipo de ensayos. Se trata de
una herramienta potente y muy flexible. Con ella podemos realizar ensayos muy
completos, con mediciones de desplazamientos, deformaciones, fuerzas,
aceleraciones, y realmente cualquier señal que queramos, siendo los resultados
bastante satisfactorios.
La principal ventaja que presenta con respecto a otros equipos es que nos permitirá
realizar estos ensayos con un único equipo de adquisición de datos, de forma
sincronizada. Con ello nos evitamos los problemas que pueden surgir a la hora de
poner en común los datos recogidos para un ensayo con varios equipos en paralelo.
En cuanto al principal inconveniente que presenta el Controlador FlexTest IIm
podemos destacar su baja capacidad de carga. Si bien los 1000 kg de carga
disponibles para cada uno de los actuadores instalados pueden ser suficientes para
ensayos dinámicos de ciertos elementos mecánicos, como podrían ser ensayos tipo
fatiga, no debemos olvidar que el equipo se encuentra instalado en el Laboratorio
del Departamento de Estructuras, por lo que si quisiéramos realizar un estudio
sobre algún componente estructural de cierta envergadura, los 1000 kg de
capacidad de carga se antojan insuficientes.
Para intentar paliar esta deficiencia se ha construido un mecanismo que nos
permite incrementar la carga de ensayo hasta cuatro veces más, siendo conveniente
como ya hemos explicado anteriormente procurar no sobrepasar la carga de diseño
para la que fue construida.

159
En cuanto al estudio sobre el comportamiento del pórtico ante carga estática,
debemos señalar que debido a que la estructura estudiada no fue concebida para la
realización de un estudio de estas características, los resultados obtenidos no
fueron del todo satisfactorios. Por ello esperamos que con la nueva estructura de
prácticas que se ha diseñado para intentar paliar las deficiencias que presentaba la
anterior, los resultados en futuros estudios sean mucho mejores.
Agradecimientos:
Para concluir me gustaría expresar mi agradecimiento a todos los que me han
ayudado a realizar este proyecto. A Ramón Rojas Díaz y Mario Solís Muñiz por su
colaboración, y muy especialmente a Pedro Galvín Barrera y Emilio Gómez
Álvarez, que han estado siempre disponibles cuando he requerido su ayuda.