PROCESOS DE CLASIFICACIÓN DE LA INFORMACIÓN DEL LÁSER … · 2016-06-30 · MCC-LIDAR: Programa...
15
PROCESOS DE CLASIFICACIÓN DE LA INFORMACIÓN DEL LÁSER ESCÁNER TERRESTRES, EL CASO DE VILA VELLA EN TOSSA DE MAR. Mt. Univ. Juan Manuel Corso Sarmiento Arquitecto Noviembre 2011
Transcript of PROCESOS DE CLASIFICACIÓN DE LA INFORMACIÓN DEL LÁSER … · 2016-06-30 · MCC-LIDAR: Programa...

PROCESOS DE CLASIFICACIÓN DE LA INFORMACIÓN DEL LÁSER ESCÁNER TERRESTRES, EL CASO DE VILA VELLA EN TOSSA DE MAR.
Mt. Univ. Juan Manuel Corso Sarmiento Arquitecto
Noviembre 2011
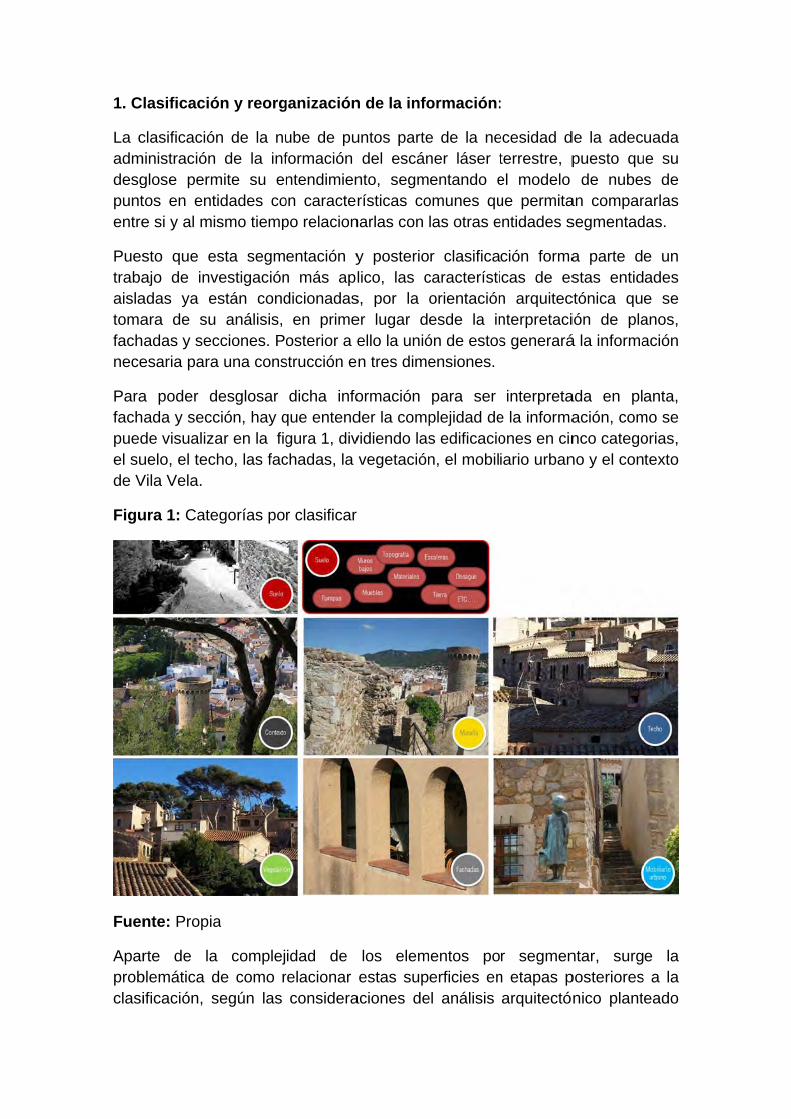
1. C
La cadmdesgpuntentre
Puestrabaaislatomafachnece
Parafachpuedel sude V
Figu
Fuen
Aparprobclasi
lasificació
clasificacióministraciónglose permtos en ente si y al mi
sto que eajo de invadas ya eara de suadas y sec
esaria para
a poder dada y seccde visualizuelo, el tecVila Vela.
ura 1: Cate
nte: Propia
rte de lablemática dificación, s
ón y reorg
n de la nun de la infmite su entidades coismo tiemp
esta segmvestigaciónestán condu análisis, cciones. Poa una cons
desglosar ción, hay qar en la fig
cho, las fac
egorías po
a
a complejde como rsegún las
ganización
ube de puformación ntendimien
on caracterpo relacion
entación yn más apldicionadas
en primeosterior a e
strucción e
dicha infoque entendgura 1, divchadas, la
r clasificar
idad de relacionar considera
n de la info
untos partedel escán
nto, segmrísticas co
narlas con
y posteriolico, las c
s, por la er lugar dello la unión tres dime
ormación der la compvidiendo lasvegetación
los elemestas sup
aciones de
ormación:
e de la nener láser tentando e
omunes qulas otras e
r clasificacaracterístiorientaciónesde la inón de estosensiones.
para ser plejidad des edificacion, el mobil
mentos poerficies en
el análisis
:
ecesidad dterrestre, pel modelo ue permitaentidades s
ción formacas de esn arquitecnterpretacis generará
interpretae la informaones en ciniario urban
r segmenn etapas parquitectó
de la adecpuesto qu
de nubean comparsegmentad
a parte dstas entid
ctónica quión de plaá la informa
ada en plación, comnco categono y el con
ntar, surgposterioresnico plant
uada ue su s de
rarlas das.
e un ades e se anos, ación
anta, mo se orias, texto
e la s a la eado

comno topor prodque modinforexist
Figurespcon
Fuen
En laque
2. Ade ra A coinforpost Dete
Full-cual vegevaria
o requisitoodas las inejemplo e
duce un ruila informa
difican, sormación eten.
ura 2: Derepecto a la color respe
nte: Propia
a comparaal no filtra
Ruido d Elemen Vacíos
Antecedentango:
ontinuaciórmación teriormente
ección de l
-Waveformmúltiples
etación, enas funcion
o para el anformacionen la visuido excesiv
ación de eleobre todo ntre estas
echa DTMaltura. Izqecto a la a
a
ativa de losr la informa
de la vegetatos verticade informa
tes de pro
n explicamde vegee los progr
a vegetaci
m-Analysireflejos so
n ello se baes de Gau
nálisis denes de la alización vo que difiementos v
cuando s superfic
generadouierda DT
altura
s dos modación se id
ación ales que intación
ocesos de
mos los ptación, m
ramas que
ón en imág
s: Los pulson recibidoasa la técnussian, pa
esta informnube debede la infoculta la lec
verticales qhay vací
ies vertica
o a partir dTM del sue
delos digitadentifican lo
terfieren co
e detecció
principalesmediante los utilizan
genes de R
sos láser gos por pulsnica FWA ,ara cada u
mación. Coen relacionormación ectura de laque no se íos de inales, crea
e toda la nelo y techo
ales de teros siguient
on el suelo
ón de la v
s procesosalgoritmo
n.
Rango:
golpean múso, esto oc interpreta
uno de las
omo vemosnarse al unen planta, s vías y teven el plan
nformaciónndo supe
nube de puos de la m
rreno DTMtes problem
o
egetación
s de clasios de c
últiples supurre con frndo la señmedidas
s en la figunísono, ya
la vegetaerrazas, al na, pero q
n, interpolrficies que
untos con isma selec
M, identificamas:
n en imáge
ificación dclasificació
perficies, precuencia ñal recibidade rango,
ura 2 a que ación igual ue la ando e no
color cción
amos
enes
de la n y
por lo en la a con , que

dependen en la capacidad del láser escáner utilizado para recibir estas medidas múltiples.1
k-nearest neighbors (KNN): algoritmo de clasificación de imágenes de rango de entornos urbanos
conditional random fields (CRF): 2 Utiliza super-voxels para reducir la cantidad de datos para ser procesados,
Markov networks and support vector machines (SVM): Adaptan la función de la técnica de gradiente max-margin en redes Markov para aprender una clasificación de modelos de hight-orden3, para manejar una gran cantidad de datos y asumirlo en tiempos de computación Triebel, utilizando primero los procesos K-D trees antes que los asociativas redes Markov4.
3. Comparativa entre programas lidar de fuente abierta y gratuitos Tabla 1: Comparativa programas Lidar gratuitos (Se incluye en esta tabla VRmesh siendo un programa de pago, que admite una versión de prueba de tres meses)
Fuente: Propia Cabe destacar de los siguientes programas de la tabla anterior:
1 ELSEBERG, Jan., Full Wave Analysis in 3D Laser Scans for Vegetation Detection in Urban Environments, School of Engineering and Science, Jacobs University Bremen gGmbH, 28759 Bremen, Germany, 2011. 2 E. H. Lim and D. Suter. 3D Terrestrial LIDAR Classifications with Super‐Voxels and Multi‐Scale Conditional Random Fields. Computer‐ Aided Design, 41(10):701 – 710, 2009. 3 D. Munoz, J. A. Bagnell, N. Vandapel, and M. Hebert. Contextual Classification with Functional Max‐Margin Markov Networks. In Computer Vision and Pattern Recognition (CVPR), 2009. 4 R. Triebel, K. Kersting, and W. Burgard. Robust 3D Scan Point Classification using Associative Markov Networks. In ICRA ’06, pages 2603–2608, 2006.
Software terrain analysis
lidar
volume
point clouds
processing
segm
entation
filtering
feature estim
ation
registration
gridding
DEM
binning
P2G
data an
alysis
Classification
Filter
curvature
Graund
Interpolation
GIS / raster vector
Bathym
etry
LAS
River/w
ather/RBT
Man
agem
ent
Detrendring
Makai Voyager 1 1 1 1
Point Cloud Library (PCL 1 1 1 1 1 1
Points2Grid 1 1 1 1 1
MCC‐LIDAR 1 1 1 1 1 1
DielmoOpenLidar 1 1
SAGA GIS 1 1 1 1
VRMesh 1 1 1 1 1 1 1 1 1 1 1 1
River Bathymetry Toolkit (RBT) 1 1 1 1
BCAL LiDAR Tools 1 1 1
Geospatial Data Abstraction Library 1 1
xyzRotatorDH 1 1
GRASS GIS 1 1 1 1
libLAS 1 1
Points2Grid Utility (winP2G) 1 1 1
ANN 1 1
LViz: 3D LiDAR Visualization Tool 1
MCC-LIDAR: Programa de fuente abierta para el procesamiento del retorno (discrete-return) del registro de datos LIDAR en ambientes forestales. Se clasifican los datos de suelo y no suelo, utilizando los algoritmos de clasificación de curvatura desarrollados por Evans and Hudak, 20075. GRASS GIS: Programa de fuente abierta de sistemas de información geográfica, que incluye herramientas relacionadas con el procesamiento de infración LIDAR, en la actualidad no reconoce de forma directa la información de formato LAS, el más común para datos LIDAR. BCAL Lidar Tools: Herramientas de código abierto desarrollado por la Universidad Estatal de Idaho en el Boise Center Aerospace Lab IDL, desarrollado como una aplicación, para el paquete de software ENVI. Incluye una herramienta de filtrado de altura optimizado para abrir pastizales, desarrollado por Streutker y Glenn, 20066. SAGA GIS: Programa de fuente abierta de sistemas de información geográfica, que incluye varias herramientas para manipular nubes de puntos, por ejemplo tiene una calculadora de atributos, filtros de reclasificación y métodos de interpolación a través de una retícula, tiene en cuanto a la clasificación un filtro en base a una retícula, adaptada de la investigación de Vosselman 20007. ANN: Es una libreria de busqueda de “Approximate Nearest Neighbor”. Escrita en c++, la cual soporta multiples estructuras de datos y algoritmos tanto para extraer como aproximar una búsqueda de “nearest neighbor”, buscando de forma arbitraria a grandes dimensiones. Se puede descargar la aplicación 1.1.2 en la página http://www.cs.umd.edu/~mount/ANN/ y fue desarrollada por David M. Mount y Sunil Arya en el 2010. Otros programas importantes para la clasificación de la nube de puntos, pero de carácter comercial son:
Lviz http://lidar.asu.edu/LViz.html
Fusion http://forsys.cfr.washington.edu/fusion.html
SAGA-GIS http://www.saga-gis.org/en/index.html
MARS FreeView http://www.merrick.com/index.php/geospatial/services-gss/mars-software
MATLAB
5EVANS, Jeffrey S.; HUDAK, Andrew T., A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments, IEEE Transactions on Geoscience and Remote Sensing. 45(4): 1029‐1038, 2007 6 EHINGER, Sara,. Design, development, and application of lidar data processing tool, A thesis, submitted in partial fulfillment of the requirements for the degree of Master of Science in Geographic, Information Science Idaho State University, 2010 7 ZHAN, Keqi,. A Progressive Morphological Filter for Removing Nonground Measurements from Airborne LIDAR Dat, IEEE Transactions on geoscience and remote sensing, VOL. 41, NO. 4, 2003.

4. Ca Con puntprelielemrugoinfor En eelemventpartipermmed Figu
Fuen En laaérelas sselec
http://dir Gnuplot
http://ww
aso de es
la versióntos. Se utminar en
mentos en osidad, aprmación co
el caso dementos quetanas, o laiendo de
mita identifdieval.
ura 4: Meto
nte: Propia
a figura 5 eos sobre superficiescción preli
rsig.blogspt ww.gnuplo
tudio de V
n de pruebtilizo este base al plos cuale
plicado soomo vegeta
e la nube de presentana vegetació
esta inforicar los ele
odología p
a
podemos vbases de
s de vegetminar de la
pot.com/20
ot.info/
Vila Vella e
a de Vrmeprograma
promedio s los puntobre escáación.
de puntos n cierto nivón, por ellrmación y ementos ur
lanteada
ver la aplicescáner láación bajaa vegetació
010/11/lida
en Tossa
esh se reala ya que de la postos son diáneres aé
TLS, estavel de como se plant
y de una rbanos que
cación de eáser terres
a con respón de form
ar-point-clo
de Mar co
lizó una clpermite r
sición de lispersos, léreos LID
a clasificacmplejidad, c
te una meposterior e compone
este filtro dstre. Desta
pecto del sma automát
ud-visualiz
on el prog
asificaciónealizar unlos puntosllamado clAR, inter
ción encuecomo elemetodología
clasificacióen este cas
diseñado pacando la suelo y comtica.
zation.html
rama VRm
n de la nubna clasificas, identificlasificaciónrpretando
entra todomentos urba
(figura 4),ón por plsco patrim
para escánseparació
mo realiza
l
mesh
be de ación ando n por
esta
s los anos, , que anos
monial
neres ón de a una

Figuradio
Fuen
Postpróxestabaja
Tamestacom
Figu
Fuen
ura 5: Vego de 0.6 m
nte: Propia
terior a eximas, divids, por unas se identi
mbién al sebleciendo o vegetaci
ura 6: Clas
nte: Propia
getación y y con un m
a
esta clasidiéndolas
a parte las fican como
er identificaa priori un
ión alta y p
sificación p
a
elementosmínimo de
ificación sen dos ensuperficieso suelo y la
ado el suena altura dpor dejo co
por proximi
s complejoe 1000 pun
se identifin relación s conformaas que est
elo, se reade esta, enomo baja, l
dad
os: Detecctos
ican las de las dif
adas por ptán sobre e
aliza una dn este casoo cual vem
ión de rug
superficiesferencias d
puntos queestas como
división de o por enci
mos en le fi
gosidad co
s horizonde altura e
e se consido techo.
la vegetama de 2 migura 6 y 7
on un
ntales entre deran
ación, metro 7.

Figude 1Edifi
Fuen
Cominforelim
Las distr
En pesteresomuracon med
En sresoprobya qa ladegrinforruido
En tedistadejaresoellos
Por ruido
ura 7. Izqu1.2 m de icio: 34.728
nte: Propia
mplementarrmación deinación de
nubes de ribución de
primer luga levantam
olución de alla tiene uuna distri
dia.
segundo luolución, ya blemática due se gen
as fachadaradado de rmación poo.
ercer lugaancia o dendo caras
olución mus de 20cm.
último enco necesita
ierda detealtura, S
8 puntos. D
a
rio a dichae la nube de los eleme
puntos rese la informa
ar las fachmiento se
1 cm de duna menoribución ho
ugar la nubno en cua
de su resonera como as, con udicha info
or una part
r encontraesde la ros en somy baja ent.
contramos procesos
cción de Suelo: 618Derecha p
clasificacide puntos entos que n
sultantes seación y com
hadas con centraba istancia en
r resoluciónomogénea
be de puntanto a la molución se una informna alta re
ormación ate e inform
amos la infonda de la
mbra por tre puntos
una inform singulare
Superficies .541 puntroyección
ión se realal suelo, r
no se cons
e dividen emplejidad:
la mayor en la obtentre puntosn dada la dde la info
tos clasificmedia de ladebe a la
mación indesolución la distanc
mación redu
formación da muralla q
la altura , llegando
mación ques, por un
horizontalos / Vegeal suelo.
lizo un prorellenando sideran su
en cuatro t
informacióención des como medistancia dormación
cada del sua distanciapoca homirecta a la alrededor
cia, dejandundante en
de cubiertaque se ende ciertoa ser la m
e por su dlado la inf
es Slope 7etation: 64
ceso de prlos vacíoselo, figura
tipos, dada
ón, ya que dichos dedia, la infde la toma 3cm entre
uelo presea entre pun
mogeneidadtoma de dde cada
o huecos n otras con
as que fuencuentra aos volúmemedia de
dimensión,formación
74% y may4.061 pun
royección s que deja7.
a su resolu
e el objetivdatos, conformación de datos,
e puntos c
enta una mntos, ya qd de la midatos orien
posición importanten su respe
e adquiridaa mayor aenes, con distancia e
, complejidde vegeta
yores tos /
de la ría la
ución,
vo de una
de la pero
como
menor ue la sma,
ntada y el
es de ectivo
a a la ltura, una
entre
dad y ación

que presencoque estaelem
5. A
La rfigurcamelemmejo
Figuauto
Fuen
Anál
La inla diesca
Cara
En p
presenta senta una ontramos eprecisan us dos infor
mento, por
nálisis pre
reorganizacra 8. Por bios no s
mentos y sorar este p
ura 8. Clasomática y e
nte: Propia
lisis de la i
nformaciónistancia, laaneo con u
acterísticas
planta:
Ejes de Escalon Pendien
localiza Calles e Formas
un ruido complejid
elementos un grado drmaciones lo cual una
eliminar d
ción manuejemplo se pueden su agrupa
proceso al p
sificación feditada ma
a
nformació
n del TLS na altura deun límite de
s de un de
calle descnes no parantes constción en pendiens orgánicas
importantdad que p
urbanos cde interprevaría segú
a media en
de la clasif
ual impide si se repi
compararación un pperder su r
final de la anualmente
n segment
no es homoel instrumee 80º en la
sarrollo me
centrados palelos, contantes sig
nte con escs complejas
te ya que presenta ucomplejos
etación parún la cara n este caso
ficación
la compatiera el mr cuantitatproceso vrigurosidad
nube de e.
tada y clas
ogénea, pento en la vertical.
edieval am
por muros n huellas y guiendo la
calones ens en inters
está en una auto , con un nra su descque se reao tampoco
aración rigmismo proctivamente isual, e igd.
puntos, ba
sificada:
or la dismia toma de
murallado d
y jardineracontrahue topografí
n paralelosecciones d
constante oclusión,
nivel de decripción. Laaliza la tomsería repr
urosa de ceso en oal ser la
gualmente
asada en
nución de datos, po
de Tossa d
as bajas ellas irreguía de la i
de calles
movimienpor otro
etalle que a resolucióma de datoresentativa
la informaotra fechaseparació no se p
la clasifica
la resolucor el ángul
de Mar
lares implantaci
nto y lado alto,
ón de os del a.
ación, a, los n de uede
ación
ción a lo de
ón y

Limite no definido entre calles y zonas verdes Patios en interiores Unión de terrazas y calles, relación publico privado Escalones y acceso a viviendas y restaurantes conectados a las calles,
pero separados con muros bajos Intervenciones de alcantarillado recientes poco visibles para no alterar
su valor patrimonial Detalles de escaleras Clasificación de elementos, en busca de su repetición y distribución Pandeo trasversal de las calles Material de suelo irregular Piedras que alteran la morfología de las calles, alineadas contra
fachadas Intervenciones en el suelo cambiando materiales (pendiente
alcantarillado)
Fachadas:
Altura de hasta dos plantas Fachadas planas, sin cambios volumétricos a nivel de fachada, ni
balcones (Permite el desdoblamiento de los elementos, como las fachadas)
Muros bajos y cubiertas en accesos a viviendas Proyección de cubiertas inclinadas de una o dos aguas y terrazas planas Elementos urbanos (iluminación, señales) Deformación de los muros Marcos de ventanas
Cubiertas:
Alturas desiguales por terreno (Restar dtm) Pendientes irregulares Cubiertas simples de una o dos aguas, sin limahoyas, ni petos o nudos Cumbreras y limatesas descentradas Elementos en cubierta como buhardillas, beatas y lucernarios Elementos agregados, como antenas vertientes irregulares Terrazas a distintos niveles Muros laterales a cubiertas
Muralla:
Escaleras regulares con peldaños paralelos Pendiente y desagüe

Superficie regular en cemento Barandas metálicas tubos estándar Unión de barandas a muros Anomalías en intersecciones con muros de edificaciones Muro de muralla con perforaciones Muro escalonado irregular con pendientes Muro con diferente tipo de piedras y aparejos Muro Inclinado exterior de muralla Muro que se ensancha para generar el suelo de la muralla Torres a diferentes alturas y radios Acceso interior de torres con escaleras en espiral Diferentes tipos de accesos con cambios de nivel, cambio de barandas
y escalones a la entrada de las torres por la murallas Intervenciones en muralla y torres
Vegetación:
Arboles representativos Arboles grandes en el interior de parcelas Grupo de arboles en zonas verdes Vegetación en zonas verdes entre calles Limites de Vila vela División entre arbustos y arboles
Mobiliario Urbano:
Identificación de elemento Ubicación Clasificación Repetición
Relación entre elementos clasificados de la nube de punto en relación a fachadas, plantas y volumetría
Planta: Delimitación de elementos representativos de los suelos, Techos, muralla, vegetación y elementos urbanos
Fachada: Fachadas de los edificios, proyección de los techos, proyección vegetación, sección del suelo
Volumetría: Información vinculada a las caras de las parcelas como fachada de los edificios, información que modifica el volumen como aperturas de ventanas y puertas, Información vehiculada a las superficies de suelo, malla orgánica y DTM
6. Tr
Dadocumestunece
El plos adesa
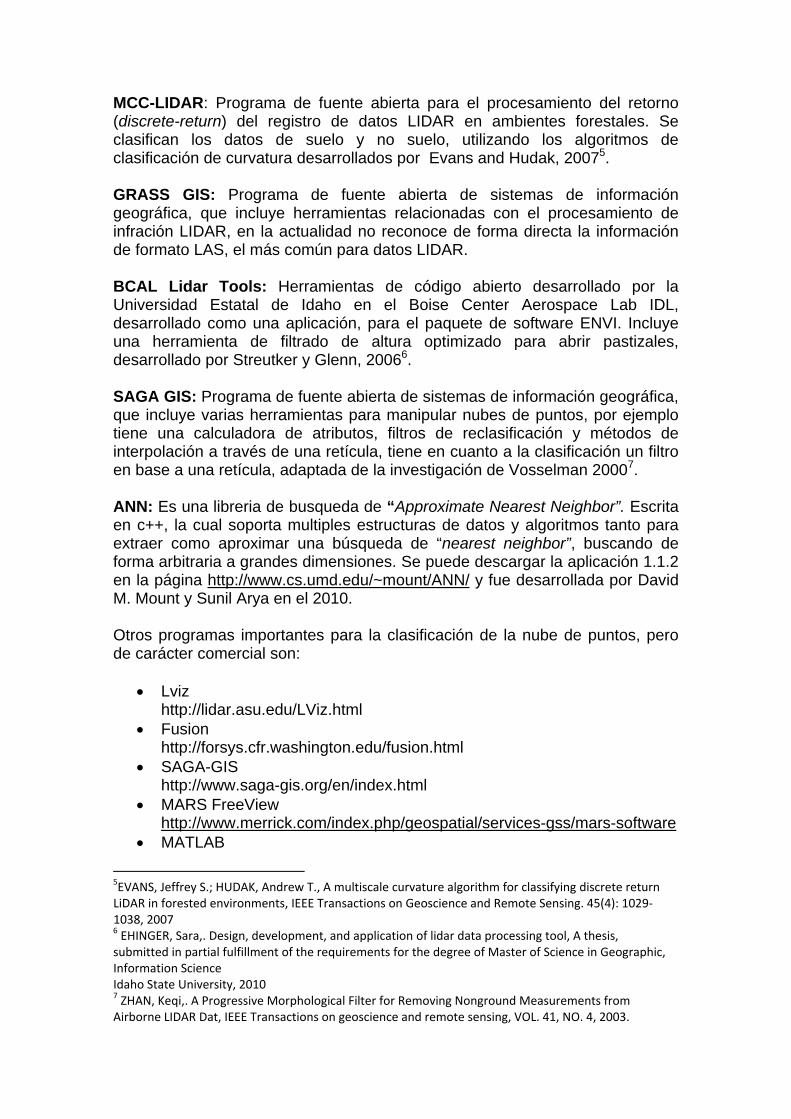
Figu
Fuen
El strabathe vque
8 ShapCloudVisua
Elemenfachadadichos e
rabajo futu
o que la plieron losdio de dos
esidades p
rimer procalgoritmos arrollados e
ura 9: aplic
nte: http://g
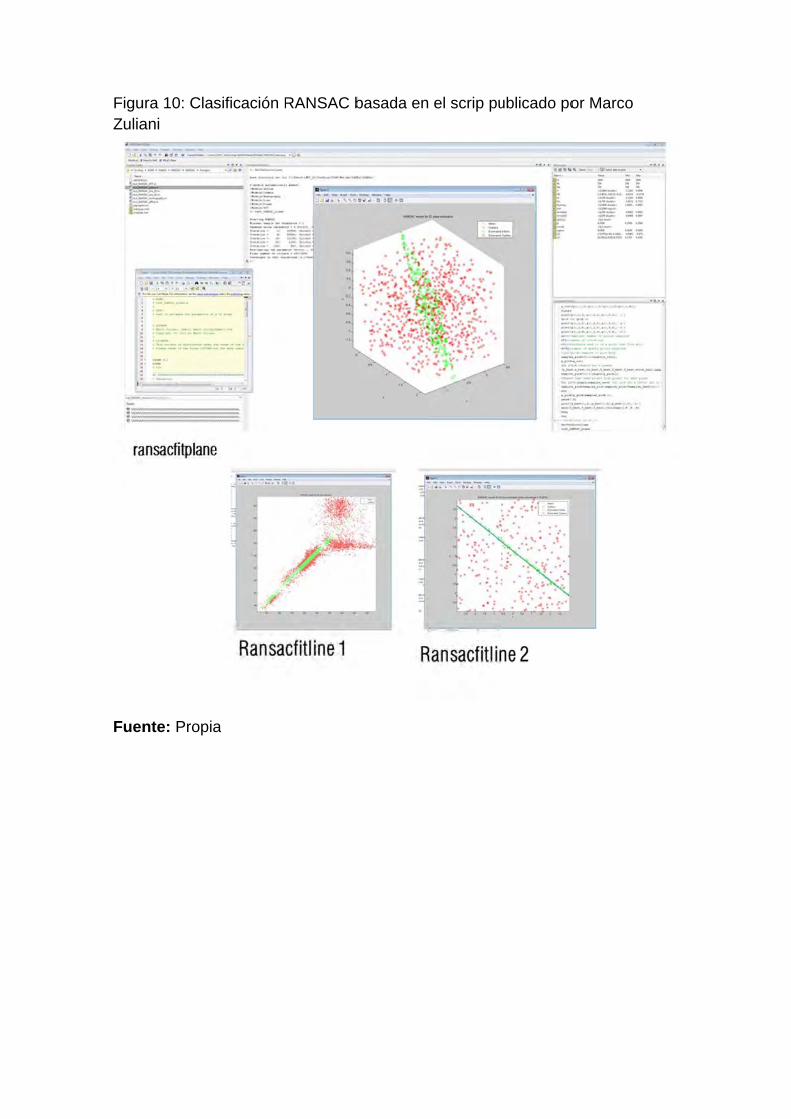
segundo pajos de Mavector of pse aplicara
povalov R, Veld Segmentatiolisation and T
ntos prefaa como eelementos
uro
clasificacis requisitoss procesosplanteadas
ceso que sdesarrollaen Matlab8
cación del
graphics.cs
proceso dearco Zulianparametersa sobre las
lizhev A. Cuttion. In: IEEE Intransmission.
bricados:en planta,
ión medias planteados de filtradoen este ca
se plantea ados por G8, figura 9.
scrip visCl
s.msu.ru/e
e clasificacni, en la clas), el cual s bases TL
ing‐Plane Traiternational CoHangzhou, Ch
repeticiónidentifica
ante progros y requiros que puaso de est
es la clasGraphics an
loud.m en
en/science/
ción que asificación podemos
LS
ining of Non‐aonference on 3hina; 2011. p.
n de elemeción, ubic
amas parrió un proceden ser eudio de ca
sificación dnd Media L
Matlab
/research/3
se desarrcon algoriver en el
associative Ma3D Imaging, M1‐8.
entos comcación y d
a escánerceso manueditados e
arácter med
de la rugosLab, llamad
3dpoint/cla
ollara se itmos RANejemplo d
arkov NetworModeling, Proc
plejos tantdescripción
res aéreoual, se planen fusión ddieval.
sidad meddos visClo
assification
basara enNSAC (estide la figura
rk for 3D Pointcessing,
to en n de
s no nte el e las
iante ud.m
n los mate a 10,
t
FiguZulia
Fuen
ura 10: Clasani
nte: Propia
sificación R
a
RANSAC bbasada en el scrip puublicado poor Marco

Bibliografía preliminar: FISCHLER, M. A., BOLLES R. C., Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography, Communications of the ACM, 1981, volume 24, pág 381-395. TORR P.H.S., ZISSERMAN, A., New Robust Estimator with Application to Estimating Image Geometry, Journal of Computer Vision and Image Understanding, 2000, volume 78 número 1, pág 138-156. Peter Kovesi, Centre for Exploration Targeting School of Earth and Environment The University of Western Australia.
ALSHAWABKEH, Yahya.,Integration of Laser Scanning and Photogrammetry for Heritage Documentation, Institut für Photogrammetrie der Universität Stuttgart, 2006
MANCERA-TABOADA, Juan., on the use of laser scanner and photogrammetry for the global digitization of the medieval walls of avila, Paparoditis N., Pierrot-Deseilligny M., Mallet C., Tournaire O. (Eds), IAPRS, Vol. XXXVIII, Part 3A – Saint-Mandé, France, September 1-3, 2010
Rodríguez Gonzálvez, Pablo., FROM POINT CLOUD TO SURFACE: MODELING STRUCTURES IN LASER SCANNER POINT CLOUDS, ISPRS Workshop on Laser Scanning 2007 and SilviLaser, Finland, 2007
UNESCO. Preliminary Draft Charter on the Preservation of the Digital Heritage, http://www.unesco.org/webworld/ica_sio/docs/28session/annex5.rtf
http://www.timzaman.nl/?p=190
http://vision.ece.ucsb.edu/~zuliani/Research/RANSAC/docs/RANSAC4Dummies.pdf
http://cmp.felk.cvut.cz/ransac-cvpr2006/
http://graphics.cs.msu.ru/en/science/research/3dpoint/classification
http://www.mathworks.com/matlabcentral/answers/6636-3d-point-cloud-and-normal-vector-to-the-surface
http://www.mathworks.com/matlabcentral/newsreader/view_thread/310367
http://www.mathworks.com/matlabcentral/newsreader/view_thread/310830
http://www.mathworks.com/matlabcentral/answers/1393-saving-in-a-loop
http://www.mathworks.es/cgi-bin/texis/webinator/search?cssm=Cssm&matlabcentral=Matlabcentral&query=point+cloud&pr=Matlabcentral&prox=page&rorder=750&rprox=750&rdfreq=500&

rwfreq=500&rlead=250&rdepth=0&sufs=0&order=r&cq=&is_summary_on=1&ResultCount=10&jump=10
http://dirsig.blogspot.com/2010/11/lidar-point-cloud-visualization.html
http://www.gnuplot.info/
Shapovalov R, Velizhev A. Cutting-Plane Training of Non-associative Markov Network for 3D Point Cloud Segmentation. In: IEEE International Conference on 3D Imaging, Modeling, Processing, Visualisation and Transmission. Hangzhou, China; 2011. p. 1-8.
R. Shapovalov, A. Velizhev, O. Barinova. «Non-Associative Markov Networks for Point Cloud Classification», Photogrammetric Computer Vision and Image Analysis, Paris: 2010
http://graphics.cs.msu.ru/en/science/research/3dpoint/classification








![Procesamiento LIDAR ArcGIS10[1]](https://static.fdocuments.ec/doc/165x107/557201ef4979599169a2a6e7/procesamiento-lidar-arcgis101.jpg)