Συστήματα Σάρωσης με laser-LiDAR€¦ · Δέκτης LiDAR Εικόνα 23α....
43
Transcript of Συστήματα Σάρωσης με laser-LiDAR€¦ · Δέκτης LiDAR Εικόνα 23α....

Άδεια χρήσης
Το παρόν υλικό υπόκειται σε άδειες χρήσης Creative
Commons και δημιουργήθηκε στο πλαίσιο των Ανοιχτών
Ακαδημαϊκών Μαθημάτων από την Μονάδα Υλοποίησης
του ΕΜΠ. Για το υλικό που υπόκειται σε άδεια χρήσης
άλλου τύπου, αυτή πρέπει να αναφέρεται ρητώς.

Η ονομασία LiDAR προέρχεται από τον όρο “Light Detection
and Ranging”, ενώ αναφέρεται και ως Radar Laser
Το LiDAR αποτελεί έναν εναλλακτικό δέκτη, ο οποίος
παράγει υψομετρικά δεδομένα που δεν ήταν δυνατό να
αποκτηθούν μέχρι την εμφάνισή του.
Δεν φιλοδοξεί να αντικαταστήσει τους συμβατικούς δέκτες
(π.χ. Μηχανές αεροφωτογραφίσεων), αλλά λειτουργεί
συμπληρωματικά
LiDAR: Τι και Πώς;
3

Ο ενεργητικός αυτό δέκτης εκπέμπει μερικές χιλιάδες παλμούς laser το δευτερόλεπτο
Κάθε παλμός ανακλάται στο αντικείμενο και επιστρέφει στον
δέκτη, ενώ ο χρόνος της διαδρομής μετράται με
χρονόμετρο ακριβείας και μετατρέπεται σε απόσταση
Αυτή η απόσταση καθώς και η θέση και ο προσανατολισμός
του αεροσκάφους (που είναι εφοδιασμένο με INS και GPS)
χρησιμοποιούνται για τον προσδιορισμό των
συντεταγμένων του στόχου
LiDAR (Light Detection And
Ranging) (1/3)
4

Για κάθε παλμό μπορεί να καταγραφούν πολλαπλές
επιστροφές
Δυνατότητα για έως 200.000+ παλμούς/sec.
Κάθε τι που φαίνεται από το αεροπλάνο μπορεί να
καταγραφεί !
LiDAR (Light Detection And
Ranging) (2/3)
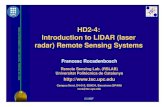
5Εικόνα 1. Laser Scanning

Ιπτάμενο σύστημα σάρωσης με laser για τον προσδιορισμό
της γήινης επιφάνειας
περιοχή προς σάρωση
σαρωμένη περιοχή
LiDAR (Light Detection And
Ranging) (3/3)
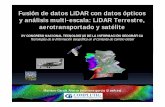
Εικόνα 2. Σαρωτής Laser
(laser scanning)
6

• Αερομεταφερόμενοι (airborne)
• Δορυφορικοί (satellite)
• Υδρογραφικοί (hydrographic)
• Επίγειοι (terrestrial)
• Μετακινούμενοι (mobile mapping systems)
Είδη δεκτών LiDAR (1/4)
7
Εικόνα 4. Δορυφορικός
δέκτης
Εικόνα 3. Airborne Laser
Scanner

Είδη δεκτών LiDAR (2/4)
8
Εικόνα 5. CloudSat
radar
Εικόνα 6. 3D Laser
scanner
Εικόνα 7. Υδρογραφικό
LiDAR

Είδη δεκτών LiDAR (3/4)
9
Εικόνα 7. Επίγειος δέκτης
LiDAR
Εικόνα 8. Tehnical Data 3D
Scanner Hardware RIEGEL
LMS-Z390i

Είδη δεκτών LiDAR (4/4)
10
Εικόνα 9. Επίγειες μετρήσεις με την χρήση MMS

Αρχή λειτουργίας LiDAR
• Μέτρηση χρόνου (Time-of-Flight – ToF)
• Μέτρηση διαφοράς φάσης (Phase Shift)
Εικόνα 10. Αρχή λειτουργίας των LiDAR
11

Kύρια μέρη συστήματος LiDAR
• Πλατφόρμα (αεροσκάφος)
• Κυρίως δέκτης (πομπός –
δέκτης)
• Διαφορικό GPS
• Αδρανειακό Σύστημα (IMU)
• Η/Υ
Εικόνα 11. Βασικά μέρη του LiDAR12

Αρχή λειτουργίας LiDAR
Εικόνα 12. Σχηματική απόδοση της λειτουργίας των LiDAR
13

Χαρακτηριστικά δεκτών LiDAR
• Ρυθμός επανάληψης (παλμοί /sec)
• Συχνότητα σάρωσης (ταχύτητα ταλάντωσης)
• Γωνία σάρωσης (IFOV)
• Ύψος πτήσης
• Απόσταση γραμμών πτήσης
• Πυκνότητα σημείων
• Εύρος κάλυψης
• Μήκος κύματος (λ = 532 – 1550 nm)
14

Για μεγάλες γωνίες σάρωσης οι ακτίνες
laser παγιδεύονται στη βλάστηση. Είναι
αδύνατο να παραχθεί DEM του εδάφους
στις θέσεις αυτές, δεδομένου ότι δεν
υπάρχουν σχετικές μετρήσεις.
Η“καταγραφή του πρώτου παλμού”
επιτρέπει την αποτύπωση των
ψηλότερων αντικειμένων, ενώ η
“καταγραφή του τελευταίου παλμού”
χρησιμοποιείται για την αποτύπωση
του εδάφους.
Πρώτος
παλμός
Τελευταίος παλμός
Εικόνα 13α. Πολλαπλές επιστροφές παλμού
15

Πολλαπλές επιστροφές παλμού
Multiple Return LIDARMultiple Return LIDAR
100%50%
Pulse emission
100%50%
100%50%
100%50%
EarthData Aeroscan Mult iple Return LIDAR
first return
second return
fourth return
0
20
nanosec meters
0
6
0
20
40
60
80
100
120
140
0
6
12
18
24
30
36
42
100%50%
third return 100%50%
no return
16
Εικόνα 13β. Πολλαπλές
επιστροφές παλμού
Εικόνα 13γ. Πολλαπλές
επιστροφές παλμού

Εικόνα 13δ. Πολλαπλές επιστροφές παλμού
Πολλαπλές επιστροφές παλμού
17

Εικόνα 14α. Σύγκριση δεδομένων του πρώτου και του τελευταίου παλμού
DSM DTM
Πολλαπλές επιστροφές παλμού
18

DSM DTM
Εικόνα 14β. Σύγκριση δεδομένων του πρώτου και του τελευταίου παλμού
Πολλαπλές επιστροφές παλμού
19

Υδρογραφικά LiDAR
• Δέκτες με κατάλληλο μήκος κύματος
– Πράσινο για διείσδυση στο νερό
• Συνδυασμός με δέκτη NIR για προσδιορισμό επιφάνειας
νερού
• Μέγιστο βάθος 15-20 m
• Μέγιστο ύψος πτήσης 400 m
Εικόνα 15. Airborne LiDAR
Bathymetry
20

Διαδικασία σάρωσης
• Προγραμματισμός πτήσης
• Ίδρυση και μέτρηση σημείων επίγειου ελέγχου (GCP)
• Βαθμονόμηση συστήματος LiDAR
• Πτήση και Συλλογή δεδομένων
• Επεξεργασία πρωτογενών δεδομένων
• Επιβεβαίωση και έλεγχος ποιότητας
• Παραγωγή προϊόντων
21

Βαθμονόμηση συστήματος LiDAR
• Προσδιορισμός γραμμικών και γωνιακών αποκλίσεων
των δεκτών και υποσυστημάτων (boresight
misalignment)
• Βαθμονόμηση συστήματος γεωαναφοράς (GPS/IMU)
πριν από κάθε πτήση (πεδίο ελέγχου)
22
ZINS
ZL
XINS
XL
YL
YINS
ZM
XM
YM
rM,k
rM,INS
k
ΔZ
ΔXΔY
rL
k’
GPS
Εικόνα 16α. Διαδικασία βαθμονόμησης του
LiDAR

23
Βαθμονόμηση συστήματος LiDAR
23
Εικόνα 16β. Διαδικασία βαθμονόμησης του
LiDAR

Χαρακτηριστικά δεδομένων LiDAR
Τα πρωτογενή δεδομένα είναι σημεία XYZ
Μεγάλη χωρική ανάλυση
– Ίχνος Laser στο έδαφος ≤ 0.50 m
– Τυπική πυκνότητα 0.5 - 20+ παλμοί/m2
– Έως 6 επιστροφές/παλμό (σε δασικές περιοχές)
Μεγάλος όγκος δεδομένων
– 1 με 6+ παλμοί/m2
– 1 με 10+ επιστροφές/m2
24
Εικόνα 17. Διαδικασία σάρωσης

Επεξεργασία δεδομένων
• Προεπεξεργασία
• GPS/INS για γεωαναφορά
• Πληροφορίες από βαθμονόμηση
• Ταξινόμηση (ανάλογα με ιδιότητες επιστρεφόμενης
ακτινοβολίας)
• Παρεμβολή (αρχεία LAS)
• Εξαγωγή χαρακτηριστικών
Εικόνα 18. Υψομετρική πληροφορία Εικόνα 19. Καταγραφή έντασης
25

Αρχεία LAS
• Το πρότυπο LAS (2003 -2007)
– Συμβατότητα δεδομένων
• Δομή
– Public Header Block – Γενικές πληροφορίες (πηγή
παραγωγής δεδομένων - κατασκευαστής, λογισμικό
επεξεργασίας, πλήθος των σημείων, στατιστικά
στοιχεία)
– Variable Length Records – Μεταβλητές όπως η
γεωγραφική προβολή και τα μεταδεδομένα
(metadata).
– Point Data Block – Τιμές συντεταγμένων X,Y,Z των
σημείων laser, τιμές έντασης, πλήθος
επιστρεφόμενων παλμών.26

Νέφος σημείων από LiDAR
Εικόνα 20. α. Digital Surface Model β. Digital Terrain Model
27

Ακρίβεια - Αξιοπιστία
• Θέση (X,Y,Z) για κάθε επιστροφή
– 0.15-1.00m οριζοντιογραφικά
– 0.10-0.15m υψομετρικά
• Έδαφος (επιφάνεια γης)
– Πώς ορίζεται το έδαφος?
• Ύψος βλάστησης
– Υποεκτίμηση κατά 0.5 με 2 m
– Το σφάλμα εξαρτάται από το είδος
• Δυσμενής επίδραση σκόνης και υγρασίας
28

Leica ALS60
Προδιαγραφές
• Επιχειρησιακό υψόμετρο πτήσης 200 m – 5000 m από
ΜΣΘ
• Επιστροφές 4
• Ψηφιοποίηση έντασης παλμού 8 bit
• Μέγιστο FOV 75 μοίρες
• Αποθηκευτικό μέσο 500 GB HDD (~18 ώρες σε μέγιστο
ρυθμό)
• Διαχείριση πτήσης μέσω Leica FCMS flight management
software
29

Leica ALS60
Εικόνα 21α. Leica ALS60Εικόνα 21β. Leica ALS60
30

Δέκτες LiDAR
Εικόνα 22α. Δέκτης LiDAR
Εικόνα 23α. ALTM Pegasus
Εικόνα 22β. Δέκτης LiDAR
Εικόνα 23β. ALTM Pegasus 31

Κλασική Φωτογραμμετρία vs. LiDAR
LiDAR Φωτογραμμετρία
24ωρη λειτουργία Δεδομένα μόνο την ημέρα
Άμεση συλλογή 3D
πληροφορίας
Πολύπλοκες διαδικασίες για
προσδιορισμό 3D
Καλύτερη ακρίβεια στα
υψόμετρα
Καλύτερη ακρίβεια στην
οριζοντιογραφία
Δύσκολη ερμηνεία από τα
νέφη σημείωνΌμως οι τιμές της έντασης
παράγουν χρήσιμες «εικόνες»
Πλούσια σε ερμηνευτική
πληροφορία
32

• 3D Μοντέλα πόλεων για αστικό σχεδιασμό
• Παρακολούθηση και προστασία παράκτιων ζωνών
• Χαρτογράφηση έργων οδοποιίας, αγωγών, έργων
μεταφοράς ενέργειας κλπ.
• Καταγραφή και διαχείριση
• Πλημμυρική προστασία και υδρογραφικές
προσομοιώσεις
• …
Εφαρμογές (1/4)
33

Εικόνα 24. Τμήμα της πόλης Pavia στην Ιταλία
Παράδειγμα Εφαρμογής: 3D μοντέλα
πόλεων
34

Εφαρμογές (2/4)
35
Εικόνα 25. Ψηφιακό Μοντέλο Επιφάνειας (DSM)

36
Εφαρμογές (3/4)
Εικόνα 26. Ψηφιακό Μοντέλο Εδάφους (DΤM)

37
Εφαρμογές (4/4)
Εικόνα 27α. DSM Εικόνα 27β. DSM
Εικόνα 28. Δημιουργία DSM

Παράρτημα (1/5)• Εικόνα 1. Laser Scanning: «Υλικό με μη προσδιορισμένη
προέλευση. Σε περίπτωση που είστε ο κάτοχος του κύριου
δικαιώματος επικοινωνήστε μαζί μας.»
• Εικόνα 3. Airborne Laser Scanner: http://www.leica-
geosystems.com-CC:BY-ND
• Εικόνα 4. Δορυφορικός δέκτης:
http://www.eohandbook.com/eohb05/ceos/part3_1_pop3
.html -CC:BY-ND
• Εικόνα 5. CloudSat radar:
http://www.eohandbook.com/eohb05/images/cloud_profil
e_02.jpg -CC:BY-NC-SA
• Εικόνα 6. 3D Laser scanner:
https://images.yumpu.com/yumpu.com/000/037/616/890/
1420006744_0484/small/FARO_Focus_3D_Laser_Scann000
001.jpg -CC:BY-ND 38

Παράρτημα (2/5)• Εικόνα 7. Υδρογραφικό LiDAR:
http://www.ocean361.com/product/common/upload/2013
/05/19/1717416C.jpg -CC:BY-ND
• Εικόνα 8. Technical Data 3D Scanner Hardware RIEGEL LMS-
Z390i:
http://www.geographica.hr/english/instruments/scanners/
riegl -CC:BY-ND
• Εικόνα 9. Επίγειες μετρήσεις με την χρήση MMS: «Υλικό με
μη προσδιορισμένη προέλευση. Σε περίπτωση που είστε ο
κάτοχος του κύριου δικαιώματος επικοινωνήστε μαζί μας.»
• Εικόνα 10. Αρχή λειτουργίας των LiDAR: Sarborn Company,
http://www.sanborn.com/ -CC:BY-NC-SA
39

Παράρτημα (3/5)
• Εικόνα 11. Βασικά μέρη του LiDAR, Εικόνα 12. Σχηματική
απόδοση της λειτουργίας των LiDAR: «Υλικό με μη
προσδιορισμένη προέλευση. Σε περίπτωση που είστε ο
κάτοχος του κύριου δικαιώματος επικοινωνήστε μαζί μας.»
• Εικόνα 12. Σχηματική απόδοση της λειτουργίας των
LiDAR: «Υλικό με μη προσδιορισμένη προέλευση. Σε
περίπτωση που είστε ο κάτοχος του κύριου δικαιώματος
επικοινωνήστε μαζί μας.»
• Εικόνα 13β. Πολλαπλές επιστροφές παλμού:
https://www.e-education.psu.edu/geog481/sites/www.e-
education.psu.edu.geog481/files/Figure_1_06.jpg -CC:BY-
NC-SA
40

Παράρτημα (4/5)• Εικόνα 14α,β. Σύγκριση δεδομένων του πρώτου και του
τελευταίου παλμού: «Υλικό με μη προσδιορισμένη
προέλευση. Σε περίπτωση που είστε ο κάτοχος του κύριου
δικαιώματος επικοινωνήστε μαζί μας.»
• Εικόνα 15α. Airborne LiDAR
Bathymetry:http://aeromapss.com/airborne-lidar-
bathymetry/-CC:BY-ND
• Εικόνα 16α,β. Διαδικασία βαθμονόμησης του LiDAR: «Υλικό
με μη προσδιορισμένη προέλευση. Σε περίπτωση που είστε
ο κάτοχος του κύριου δικαιώματος επικοινωνήστε μαζί
μας.»
• Εικόνα 17. Διαδικασία σάρωσης: «Υλικό με μη
προσδιορισμένη προέλευση. Σε περίπτωση που είστε ο
κάτοχος του κύριου δικαιώματος επικοινωνήστε μαζί μας.»
41

Παράρτημα (5/5)
• Εικόνα 21α,β. Leica ALS60: http://www.leica-
geosystems.com/en/Leica-ALS60-Airborne-Laser-
Scanner_57629.htm -CC:BY-ND
• Εικόνα 22α,β. Δέκτης LiDAR: http://www.gim-
international.com/wosimages/1727_88.jpg -CC:BY-ND
• Εικόνα 23α. ALTM Pegasus:
http://www.teledyneoptech.com/index.php/product/pegas
us-altm/ - CC:BY-ND
• Εικόνα 23β. ALTM Pegasus:
http://aerialsurveysintl.com/images/Orion_pic_xsm.PNG -
CC:BY-ND
• Εικόνα 25. Ψηφιακό Μοντέλο Επιφάνειας (DSM) & Εικόνα
26 Ψηφιακό Μοντέλο Εδάφους (DΤM) : Geological Survey
of Norway (http://www.ngu.no/ ) -CC:BY-NC-SA 42

Χρηματοδότηση
Το παρόν υλικό έχει αναπτυχθεί στα πλαίσια του
εκπαιδευτικού έργου του διδάσκοντα. Το έργο υλοποιείται
στο πλαίσιο του επιχειρησιακού προγράμματος
«Εκπαίδευσης και δια βίου μάθησης» και
συγχρηματοδοτείται από την Ευρωπαϊκό Κοινοτικό Ταμείο
και από εθνικούς πόρους.