
Procesamiento Digital de Señales Digital... · de Filtros Digitales. Filtrado Digital Facultad de...
51
Filtrado Digital Lectura 2: Estructuras Básicas de Filtros Digitales
Transcript of Procesamiento Digital de Señales Digital... · de Filtros Digitales. Filtrado Digital Facultad de...

Filtrado Digital
Lectura 2: Estructuras Básicas de Filtros Digitales

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros FIR sencillosFiltro de promedio móvil de 2 puntos (M=1 1er orden): Es el filtro FIR más simple.
Note que H(z) tiene un cero en z=-1, y un polo en z=0.Recordemos que para un sistema estable (los filtros FIR son siempre estables), la respuesta en frecuencia puede ser obtenida substituyendo
El cero en z=π (suprime la componente de alta frecuencia π), acoplado con el polo en z=0 (amplifica la frecuencia cero), funciona como un filtro pasa bajas.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
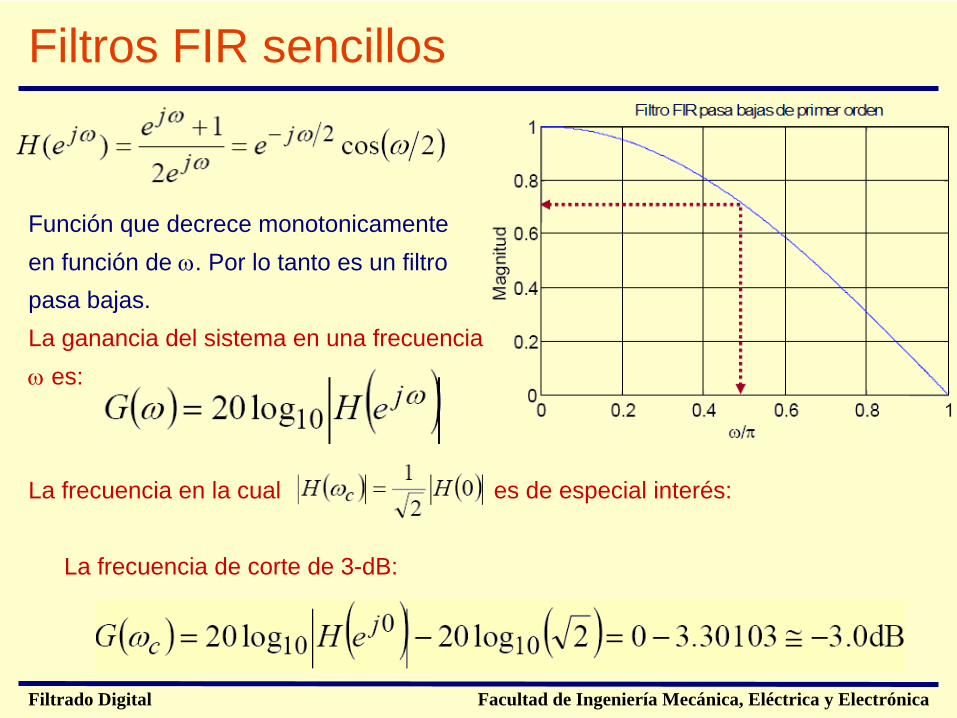
Filtros FIR sencillos
Función que decrece monotonicamente en función de ω. Por lo tanto es un filtropasa bajas.La ganancia del sistema en una frecuenciaω
es:
La frecuencia en la cual es de especial interés:
La frecuencia de corte de 3-dB:
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
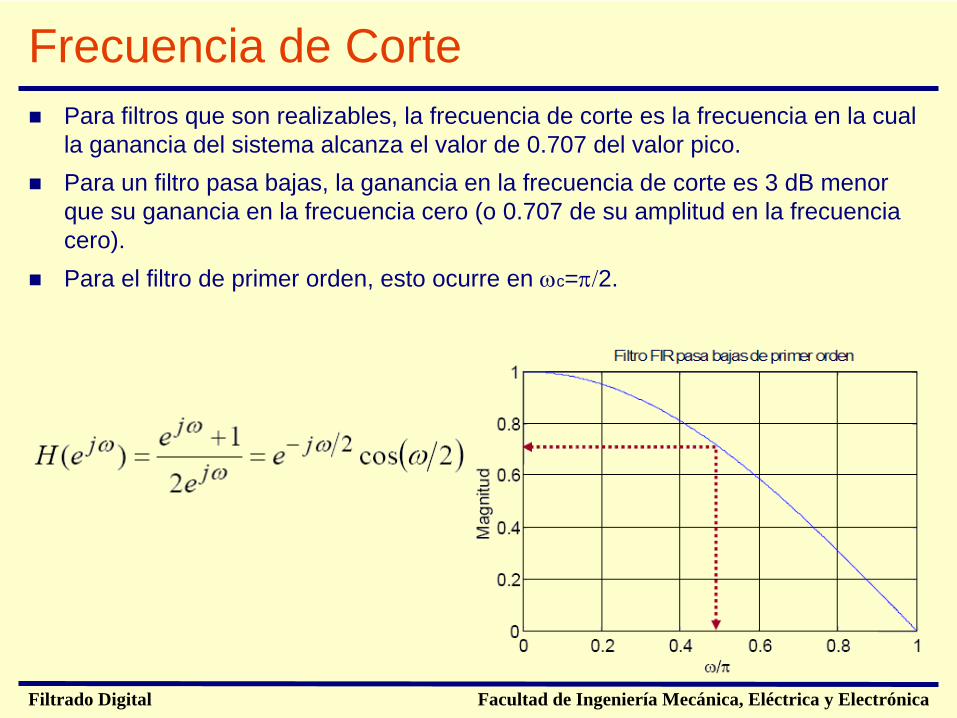
Frecuencia de CortePara filtros que son realizables, la frecuencia de corte es la frecuencia en la cual la ganancia del sistema alcanza el valor de 0.707 del valor pico.Para un filtro pasa bajas, la ganancia en la frecuencia de corte es 3 dB menor que su ganancia en la frecuencia cero (o 0.707 de su amplitud en la frecuencia cero).Para el filtro de primer orden, esto ocurre en ωc=π/2.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtro FIR en cascadaAhora consideremos un FPM de segundo orden, M=3
Así como el orden se incrementa la caída del filtro es mas pronunciada, pero la banda de paso también se decrementa.
subplot(121)w=linspace(0, pi, 512);H2=exp(-j*w/2).*cos(w/2).*exp(-j*w/2).*cos(w/2);plot(w/pi, abs(H2)); gridxlabel('Frecuencia, \omega/\pi')
%(tres secciones)subplot(122)H3=exp(-j*w/2).*cos(w/2).*exp(-j*w/2).*cos(w/2).*exp(- j*w/2).*cos(w/2);plot(w/pi, abs(H3)); gridxlabel('Frecuencia, \omega/\pi')
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
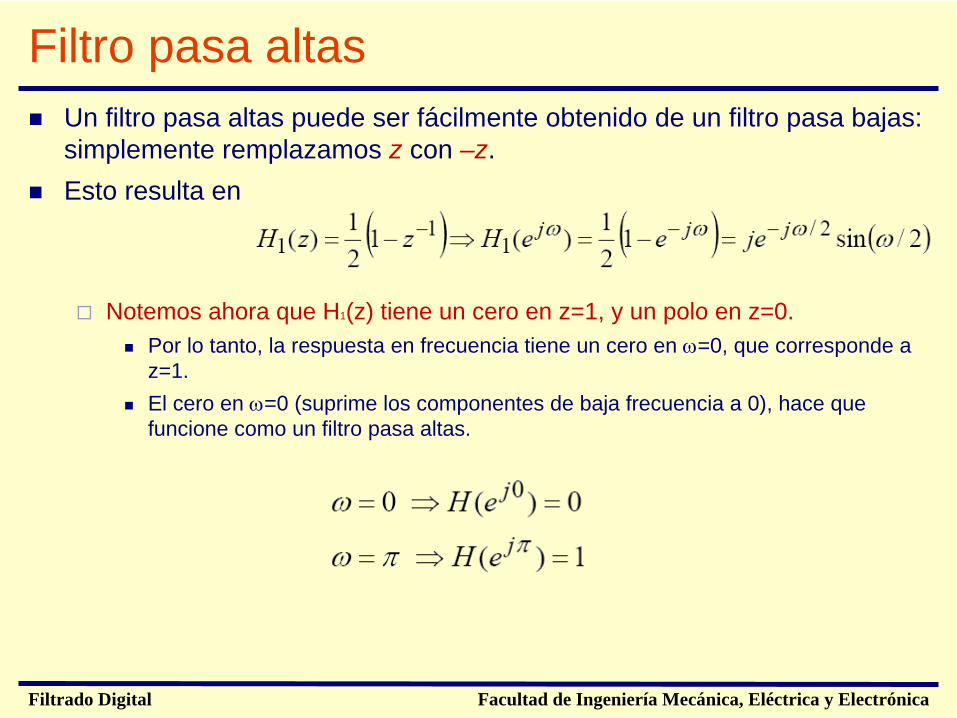
Filtro pasa altasUn filtro pasa altas puede ser fácilmente obtenido de un filtro pasa bajas: simplemente remplazamos z con –z.Esto resulta en
Notemos ahora que H1(z) tiene un cero en z=1, y un polo en z=0.Por lo tanto, la respuesta en frecuencia tiene un cero en ω=0, que corresponde a z=1.El cero en ω=0 (suprime los componentes de baja frecuencia a 0), hace que funcione como un filtro pasa altas.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros pasa altas en Cascada
subplot(121)w=linspace(0, pi, 512);H2=j*exp(-j*(w/2)).*sin(w/2)*j.*exp(-j*(w/2)).*sin(w/2);plot(w/pi, abs(H2)); gridxlabel('Frecuencia, \omega/\pi')
%(tres secciones)subplot(122)H3=j*exp(-j*(w/2)).*sin(w/2)*j.*exp(- j*(w/2)).*sin(w/2)*j.*exp(-j*(w/2)).*sin(w/2);plot(w/pi, abs(H3)); gridxlabel('Frecuencia, \omega/\pi')

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtro pasa altasOtra forma de expresar un filtro pasa altas de un orden superior es de la forma
Al igual que en el filtro anterior, obtenemos esta relación remplazando z con –z en la función de transferencia de un filtro promedio móvil.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtro IIR pasa bajasUn filtro causal digital IIR, pasa bajas de primer orden tiene una función de transferencia dada por
donde α<1 para estabilidad.La función de transferencia tiene un cero en z=-1, es decir en ω=π el cual esta en la banda de rechazo.HLP(z) tiene un polo real en z=α.El máximo valor de la función magnitud es 1 en w=0, y el valor mínimo es 0 en ω=π.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
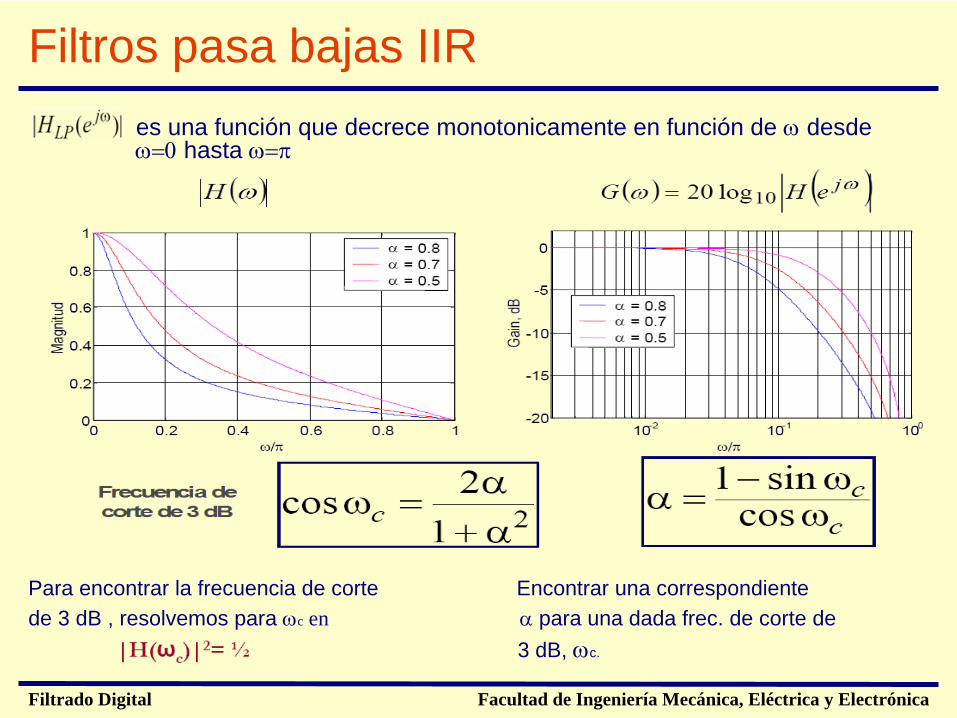
Filtros pasa bajas IIRes una función que decrece monotonicamente en función de ω
desde
ω=0
hasta ω=π
Para encontrar la frecuencia de corte Encontrar una correspondiente de 3 dB , resolvemos para ωc en α
para una dada frec. de corte de3 dB, ωc.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros pasa bajas IIREl cuadrado de la magnitud esta dada por
La derivada de con respecto a ω
esta dado por:
en el rango , ya que vimos que la función decrece monotonicamente.Para determinar la frecuencia de corte de 3 dB, hacemos que
en la expresión del cuadrado de la magnitud, lo cual resulta en:

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros pasa bajas IIR
O de otra forma
Lo cual puede ser resuelto en
La ecuación cuadrática superior puede ser resuelta para α, lo cual nos produce las siguientes soluciones, que producen una función de transferencia estable
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
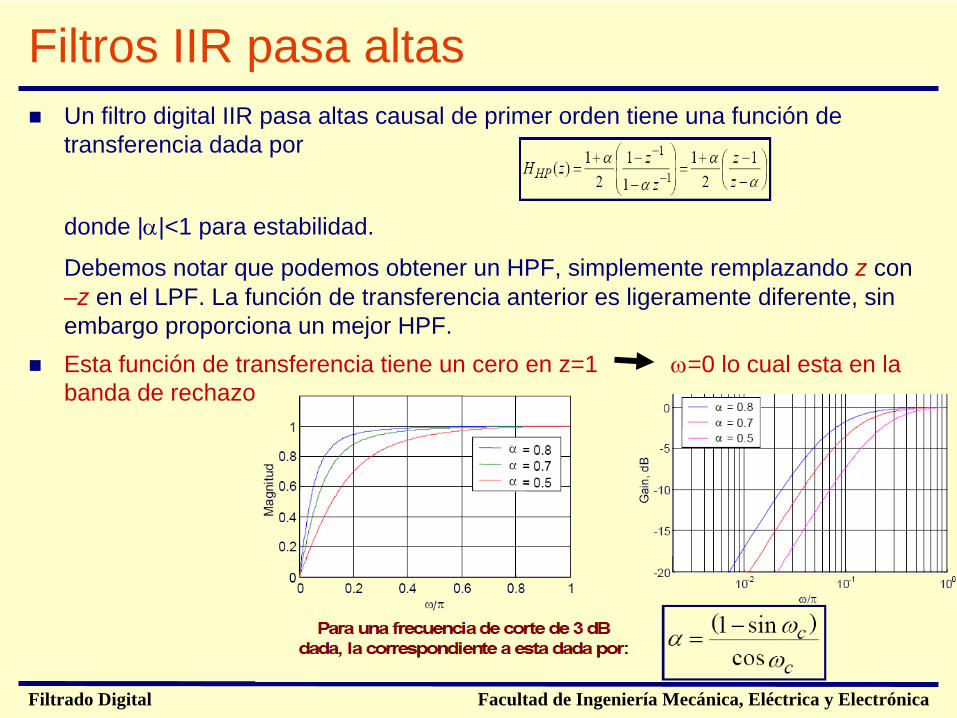
Filtros IIR pasa altasUn filtro digital IIR pasa altas causal de primer orden tiene una función de transferencia dada por
donde |α|<1 para estabilidad.
Debemos notar que podemos obtener un HPF, simplemente remplazando z con –z en el LPF. La función de transferencia anterior es ligeramente diferente, sin embargo proporciona un mejor HPF.Esta función de transferencia tiene un cero en z=1 ω=0 lo cual esta en la banda de rechazo

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
EjemploDiseñe un filtro digital pasa altas de primer orden con una frecuencia de corte de 3 dB de 0.8π.Entonces: yPor lo tanto
Filtros de orden superior pueden ser fácilmente diseñados simplemente conectando en cascada varios filtros de primer orden. Hay que notar que para filtros en cascada, la respuesta al impulso total es la convolución de las respuestas al impulso individuales, es decir:h´[n]=(h[n]*h[n] *h[n] *h[n]….. *h[n]) o también la respuesta en frecuencia total es:H´(ω)=H(ω) H(ω) H(ω)….. H(ω)
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
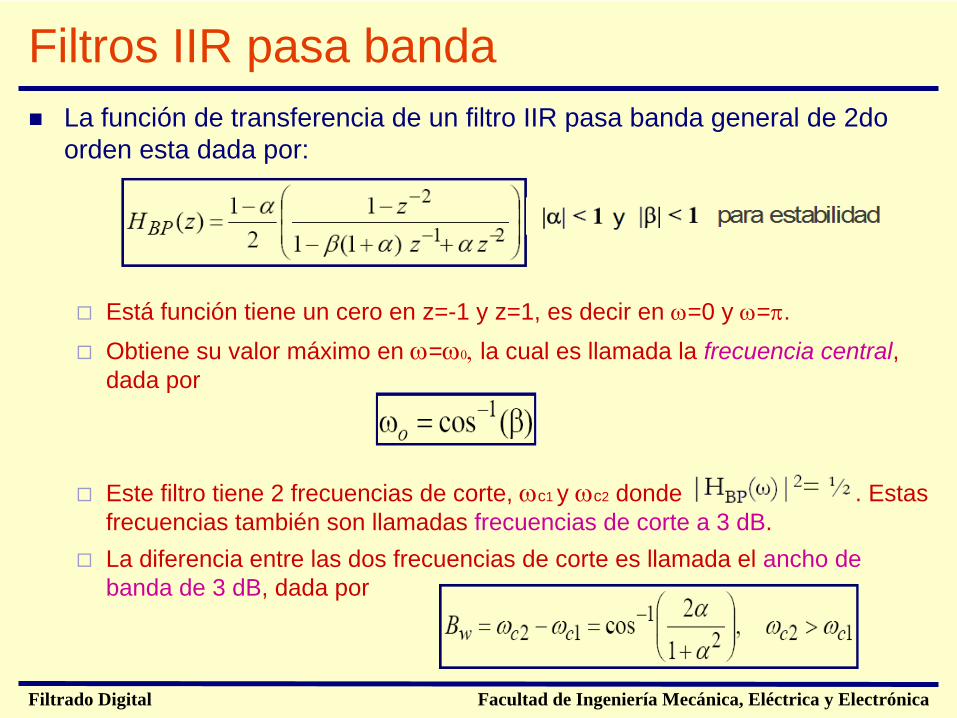
Filtros IIR pasa bandaLa función de transferencia de un filtro IIR pasa banda general de 2do orden esta dada por:
Está función tiene un cero en z=-1 y z=1, es decir en ω=0 y ω=π.Obtiene su valor máximo en ω=ω0, la cual es llamada la frecuencia central, dada por
Este filtro tiene 2 frecuencias de corte, ωc1 y ωc2 donde . Estas frecuencias también son llamadas frecuencias de corte a 3 dB.La diferencia entre las dos frecuencias de corte es llamada el ancho de banda de 3 dB, dada por

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo
Ejemplo: Diseñe un filtro digital pasa banda de 2do orden con frecuencia central en 0.4π y un ancho de banda de 3 dB en 0.1πDe esta forma y

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo - continuaLa solución de la ecuación anterior nos da los siguientes resultados:
Las funciones de transferencia correspondientes son:
Los polos de están en z=0.3671712 j1.114256 y tienen una magnitud >1. Por lo tanto los polos de están fuera del circulo unitario haciendo la función de transferencia inestable.En cambio, los polos de están en z=0.2667 j0.809554 y tienen una magnitud de 0.85237. Por lo tanto es estable.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo - continuaLa siguiente figura muestra la grafica de la magnitud de .
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
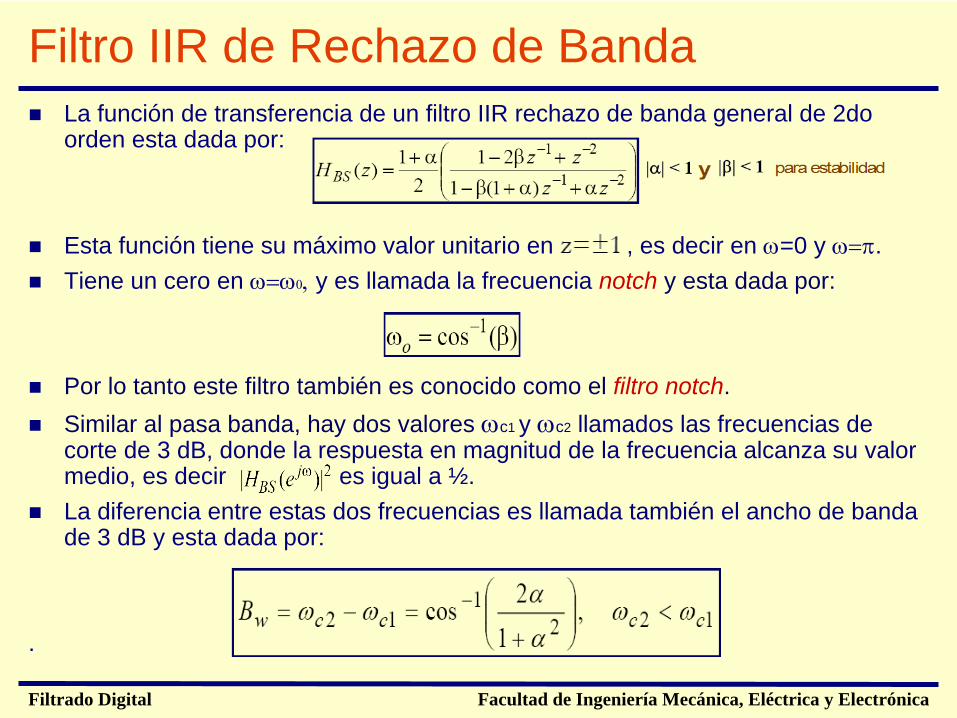
Filtro IIR de Rechazo de BandaLa función de transferencia de un filtro IIR rechazo de banda general de 2do orden esta dada por:
Esta función tiene su máximo valor unitario en , es decir en ω=0 y ω=π.Tiene un cero en ω=ω0, y es llamada la frecuencia notch y esta dada por:
Por lo tanto este filtro también es conocido como el filtro notch. Similar al pasa banda, hay dos valores ωc1 y ωc2 llamados las frecuencias de corte de 3 dB, donde la respuesta en magnitud de la frecuencia alcanza su valor medio, es decir es igual a ½.La diferencia entre estas dos frecuencias es llamada también el ancho de banda de 3 dB y esta dada por:
.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtro IIR de Rechazo de Banda

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros IIR de orden superiorNuevamente, debemos de notar que cualquiera de estos filtros pueden ser diseñados a ser de un orden superior, los cuales proporcionan mejores características de filtrado y bandas de transición más angostas.Simplemente hay que realizar estructuras en cascada, tantas veces como sea necesario para alcanzar el filtro de orden superior que se desea.Por ejemplo, para conectar en cascada K filtros pasa bajas de primer orden:
donde puede ser demostrado que
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
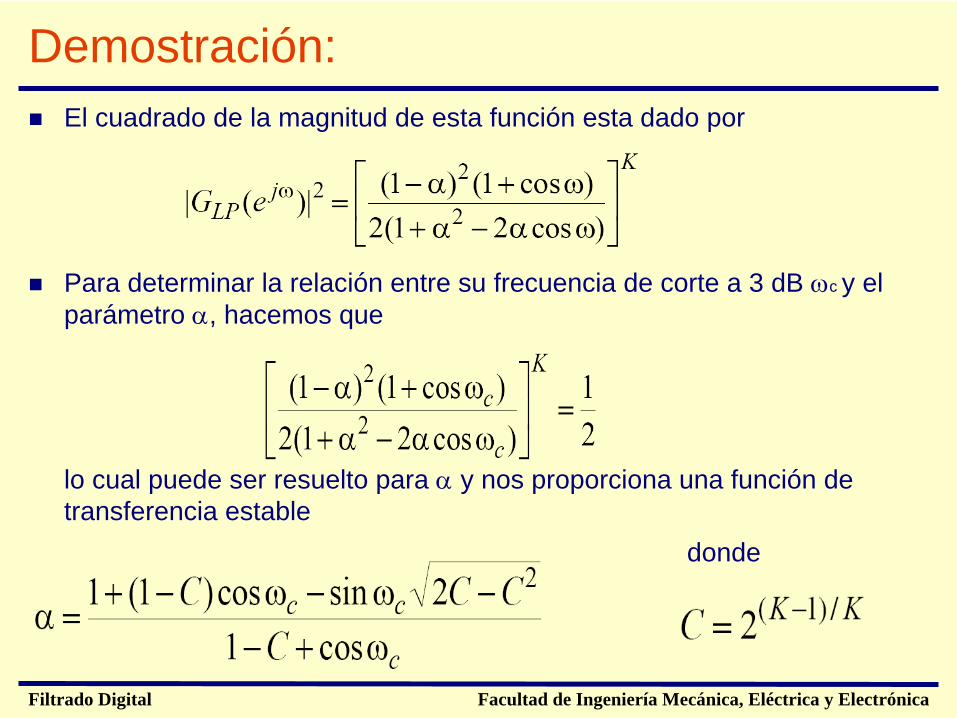
Demostración:El cuadrado de la magnitud de esta función esta dado por
Para determinar la relación entre su frecuencia de corte a 3 dB ωc y el parámetro α, hacemos que
lo cual puede ser resuelto para α
y nos proporciona una función de transferencia estable
donde

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros IIR de orden superior - EjemploSe debe de notar que la expresión para α dada anteriormente se reduce a
para k=1.
Ejemplo: Diseñe un filtro pasa bajos con una frecuencia de corte de 3 dB en ωc=0.4π usando a) una sección sencilla de primer orden y b) una cascada de 4 secciones de primer orden, compare sus respuestas en ganancia.A) Para el filtro sencillo pasa bajas de primer orden tenemos que
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo - ContinuaPara la cascada de 4 secciones de primer orden, substituimos k=4 y obtenemos:
Ahora calculamos α
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
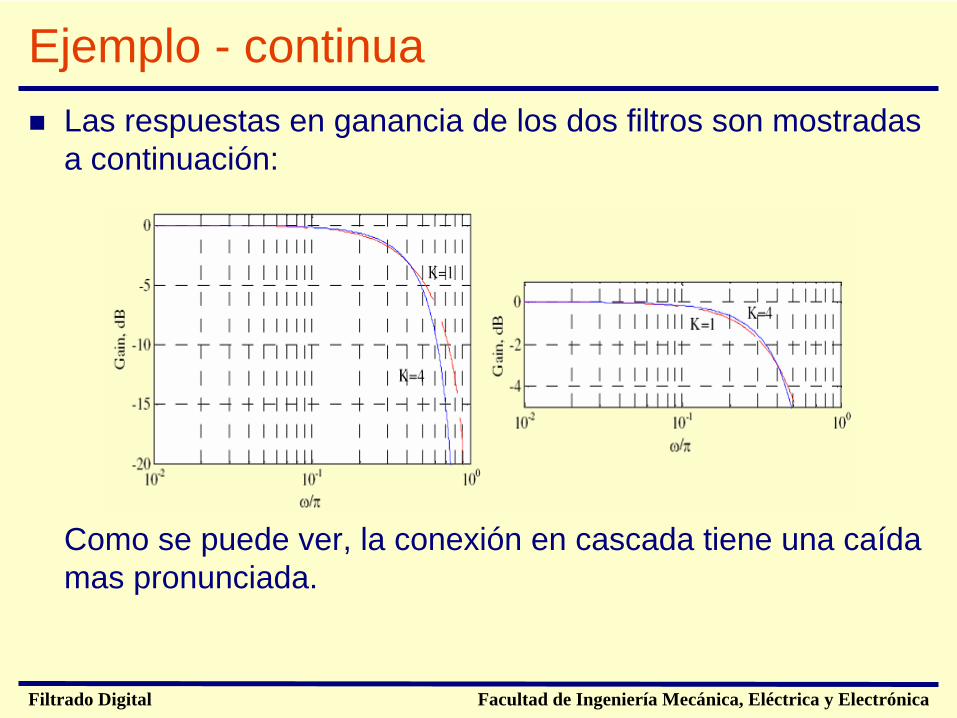
Ejemplo - continuaLas respuestas en ganancia de los dos filtros son mostradas a continuación:
Como se puede ver, la conexión en cascada tiene una caída mas pronunciada.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
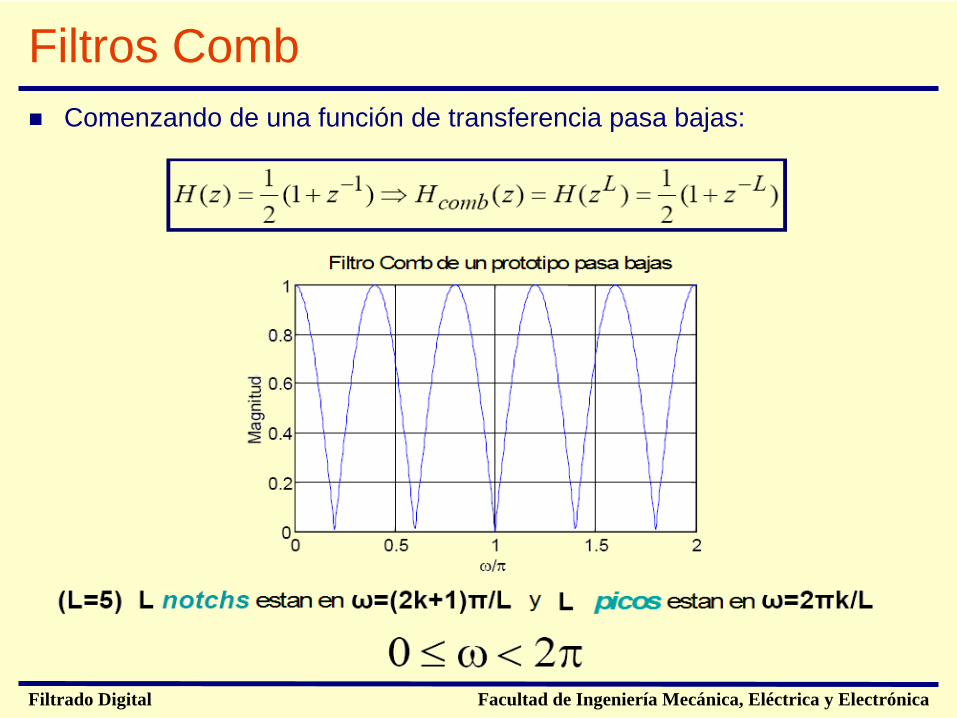
Filtro CombNote que LPF, HPF, BPF y BSF tienen una banda de paso sencilla y/o una banda de rechazo sencilla. Muchas aplicaciones requieren varias de estas regiones de frecuencia, las cuales pueden ser proporcionadas por un filtro Comb.Un filtro Comb, típicamente tiene una respuesta en frecuencia que es una función periódica de ω, con un periodo de 2π/L, donde L indica el número de bandas de paso/bandas de rechazo.Si H(z) es un filtro con una banda de paso sencilla y/o con una banda de rechazo sencilla, un filtro comb puede ser fácilmente generado de esta, remplazando cada retardo en su realización con L retardos que resultan en una estructura con una función de transferencia dada por
Si |H(ω)| exhibe un pico en ωp, entonces exhibirá L picos en ωp k/Ldonde ,en el rango de frecuenciaAsí mismo, si |H(ω)| tiene un notch en ω0, entonces tendrá L notchs en ω0 k/L, donde en el rango de frecuenciaUn filtro comb puede ser generado ya sea de un filtro prototipo FIR o IIR.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros CombComenzando de una función de transferencia pasa bajas:

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros CombComenzando de una función de transferencia pasa altas:

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros de Fase Mínima y MáximaSin entrar en detalles, veremos las siguientes propiedades y definiciones:
Puede ser mostrado que una función de transferencia causal y estable con todos los ceros fuera del circulo unitario tienen un exceso de fase comparado a una función de transferencia causal con magnitud idéntica pero con todos los ceros dentro del circulo unitario.Una función de transferencia causal y estable con todos los ceros dentro del circulo unitario es llamada una función de transferencia de fase mínima.Una función de transferencia estable y causal con todos los ceros fuera del circulo unitario es llamada una función de transferencia de fase máxima.Normalmente, nosotros esteremos interesados en funciones de transferencia de fase mínima.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Implementación de FiltrosDebemos de recordar que los filtros en el mundo real son implementados en el dominio del tiempo.
Sin embargo, como son implementados en hardware o software?
Una representación en diagrama de bloques del filtro, es el primer paso de su implementación.Por ejemplo el filtro IIRPuede ser implementada como sigue
Conociendo las condiciones iniciales y[-1], y la entrada x[n] para , podemos calcular y[n],
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ventajas de la implementación por bloques
Usando una implementación basada en un diagrama a bloques tiene varias ventajas:
Es fácil de escribir el algoritmo computacional por simple inspección del diagrama.Es fácil analizar el diagrama a bloques para determinar la relación explicita entre la salida y la entrada.Facilidad de manipular el diagrama a bloques para poder derivarotros diagramas a bloques equivalentes que conducen a diferentesalgoritmos computacionales.Facilidad de determinar los requerimientos de hardware.Es mucho mas fácil desarrollar una representación de diagramas a bloques directamente de la función de transferencia.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras equivalentes, Canónica y No canónicas
A una estructura de un filtro digital se le dice ser Canónica si el número de retardos en el diagrama a bloques es igual al orden de la función de transferencia. De otra forma, es una estructura No Canónica.
La siguiente estructura es no canónica, desde que usa 2 elementos de retardo para un filtro de primer orden.
Dos estructuras se dicen equivalentes si ellas tienen la misma función de transferencia. Una de varias estructuras equivalentes es obtenida usando la operación de transposición.
Invertir las trayectorias.Remplazar los nodos por sumadores.Intercambiar los nodos de entrada y salida.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras EquivalentesHay literalmente un número infinito de estructuras equivalentes que realizan la misma función de transferencia.
Sin embargo en la practica, debido a las limitaciones de longitud de palabra finita, una realización especifica puede comportarse muy diferente de alguna otra realización equivalente. Por lo tanto es importante elegir una estructura que los efectos de cuantización sean mínimos cuando se implemente usando aritmética de precisión finita.Veremos algunos de los procedimientos de implementación más populares mas adelante.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
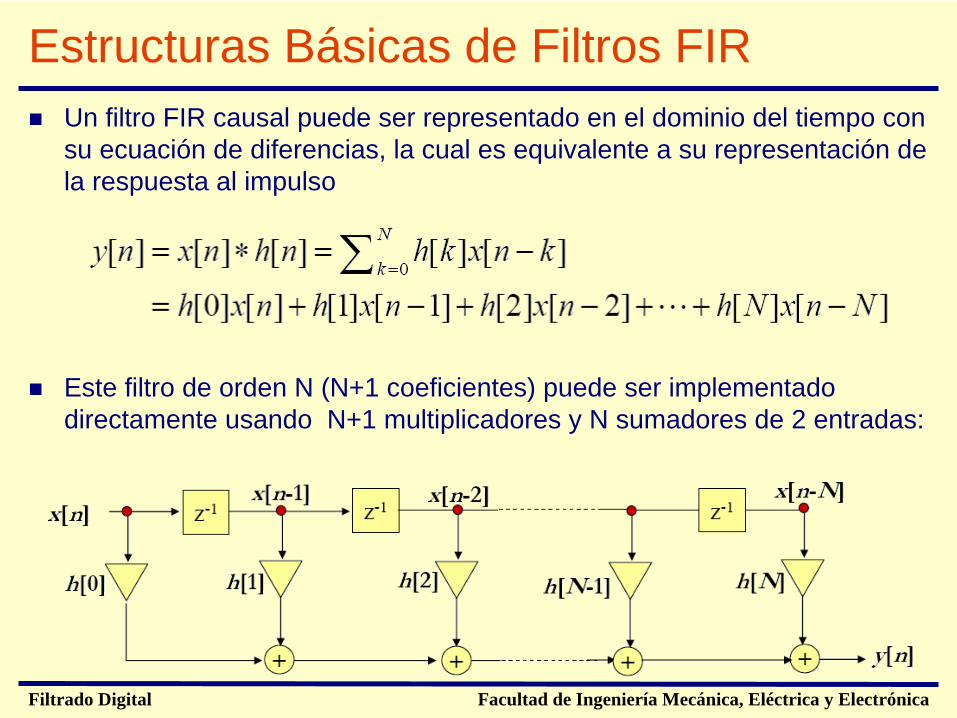
Estructuras Básicas de Filtros FIRUn filtro FIR causal puede ser representado en el dominio del tiempo con su ecuación de diferencias, la cual es equivalente a su representación de la respuesta al impulso
Este filtro de orden N (N+1 coeficientes) puede ser implementadodirectamente usando N+1 multiplicadores y N sumadores de 2 entradas:
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
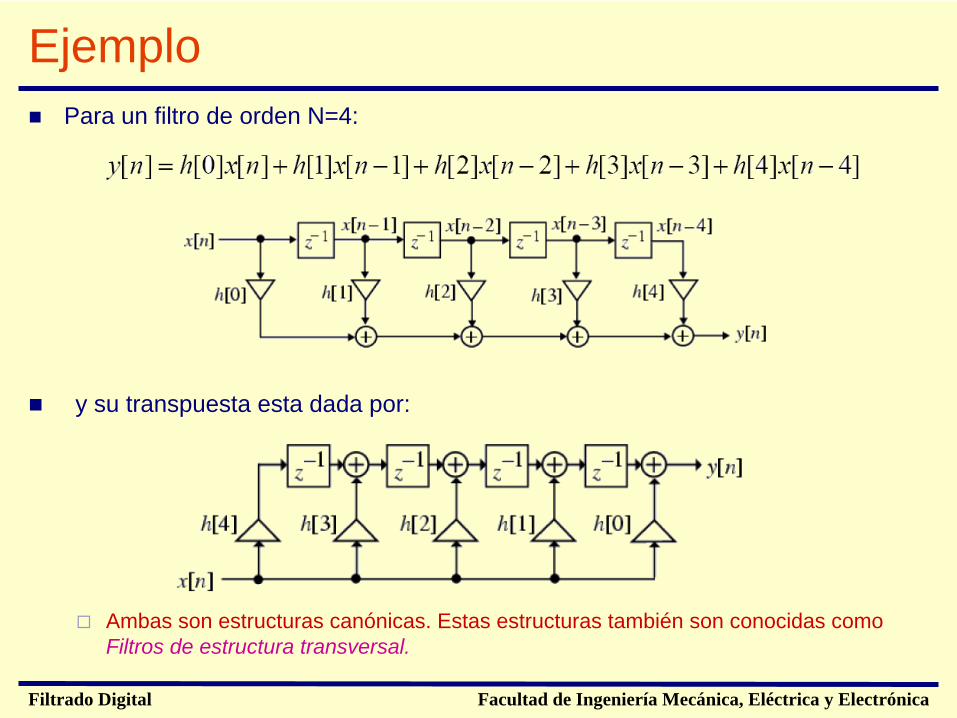
EjemploPara un filtro de orden N=4:
y su transpuesta esta dada por:
Ambas son estructuras canónicas. Estas estructuras también son conocidas como Filtros de estructura transversal.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Filtros FIR con Estructura de Fase LinealRecordemos que un filtro de fase lineal debe de tener ya sea una propiedad simétrica o antisimétrica, la cual puede ser usada para reducir el número de multiplicadores hasta casi la mitad en la implementación de la forma directa.Consideremos la función de transferencia de un filtro FIR de longitud 7 con una respuesta al impulso simétrica:
Por lo que podemos re-escribir esta ecuación como:
La cual necesita solo 4 multiplicadores, en lugar de 7

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras FIR de Fase LinealAquí mostramos la realización de este filtro

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras FIR de Fase LinealSimilarmente un filtro FIR tipo II (con longitud par, por ejemplo 8)
Puede ser implementado con 4 multiplicadores, en lugar de 8. Note sin embargo, que aun necesita 7 elementos de retardo

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras de Filtros IIRLos filtros causales IIR son caracterizados por una función de transferencia racional y real o equivalentemente por una ecuación de diferencias con coeficientes constantes.De la representación de la ecuación de diferencias, puede ser visto que la realización del filtro causal IIR requiere alguna forma de retroalimentación. Además,
Una función de transferencia digital IIR de N orden es caracterizada por 2N+1 (a y b) coeficientes únicos, y en general, requiere 2N+1 multiplicadores y 2N sumadores de 2 entradas para implementarlos.
Dado el filtro en ecuación de diferencias, podemos implementarlo directamente usando los coeficientes del multiplicador. Esta es llamada la Forma Directa I de implementación.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
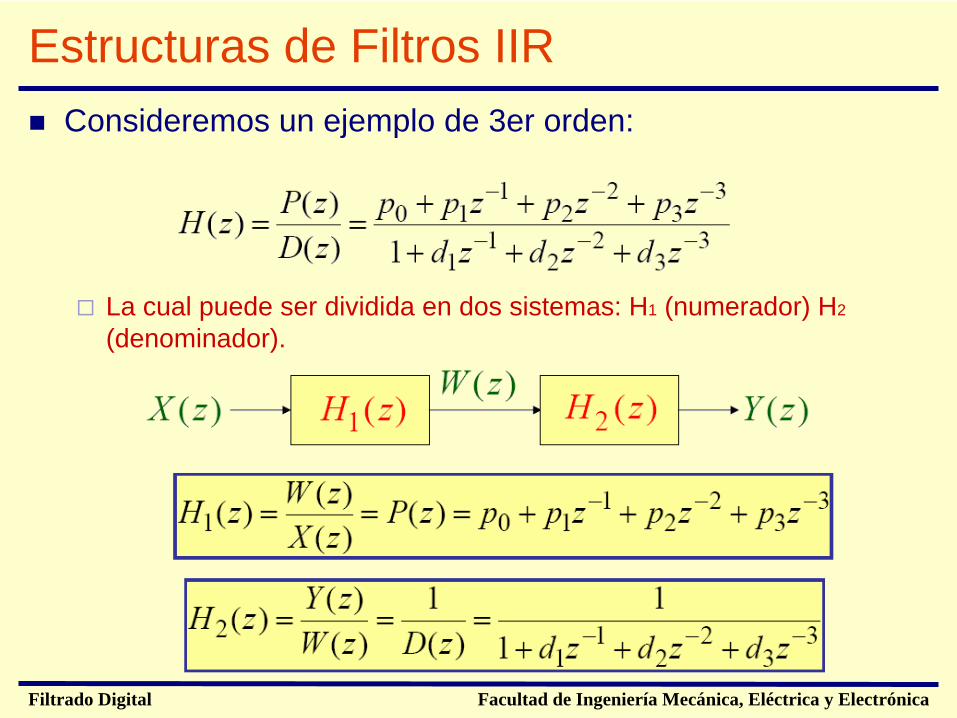
Estructuras de Filtros IIRConsideremos un ejemplo de 3er orden:
La cual puede ser dividida en dos sistemas: H1 (numerador) H2
(denominador).
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
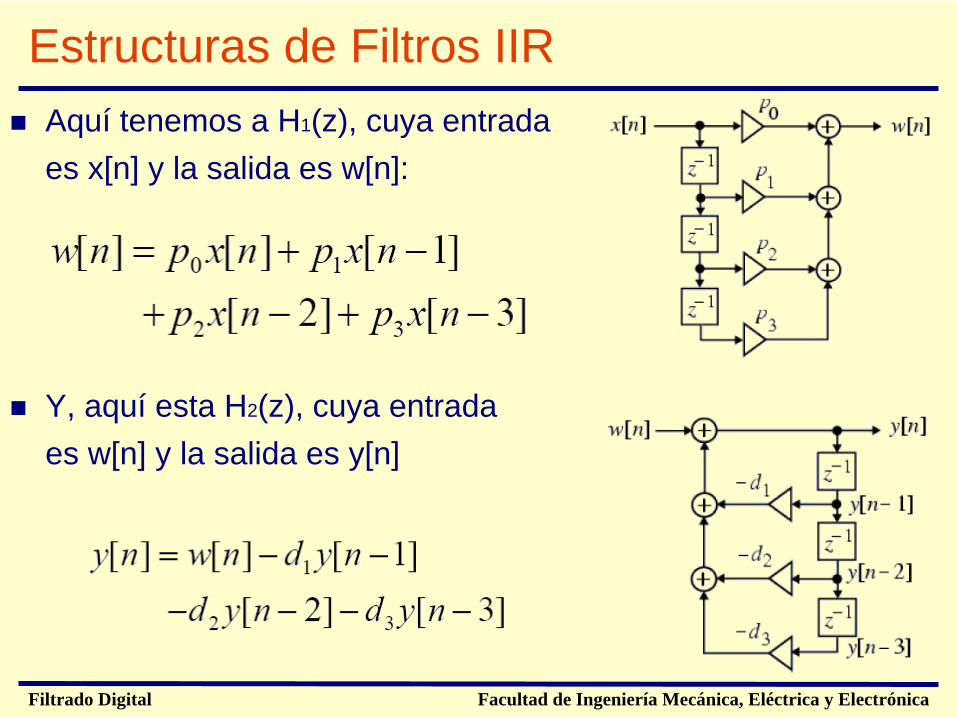
Estructuras de Filtros IIRAquí tenemos a H1(z), cuya entrada es x[n] y la salida es w[n]:
Y, aquí esta H2(z), cuya entradaes w[n] y la salida es y[n]

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras de Filtros IIR: Forma Directa IUna conexión en cascada de los dos, entonces nos da el total H(z), cuya implementación es conocida como Forma Directa I.
Debemos de notar que esta estructura es no canónica desde que emplea 6 retardos para realizar una función de transferencia de 3er orden.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Estructuras de Filtros IIR: Forma Directa IT
La transpuesta de esta implementación también puede ser obtenida:

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Otras Implementaciones no CanónicasNote que podemos implementar estas estructuras como se muestra:
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
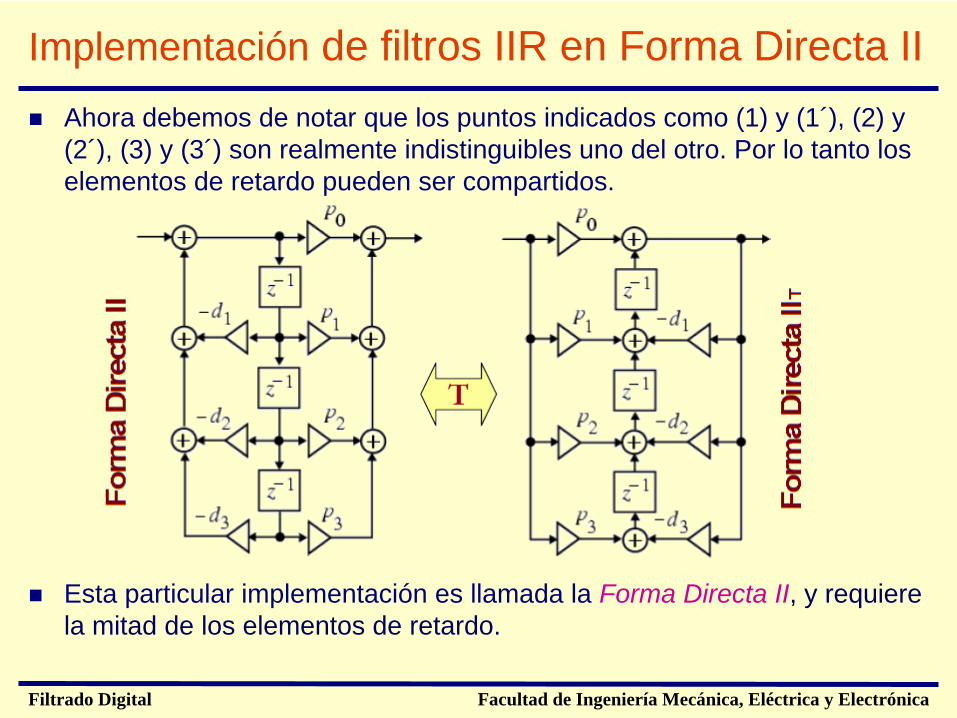
Implementación de filtros IIR en Forma Directa IIAhora debemos de notar que los puntos indicados como (1) y (1´), (2) y (2´), (3) y (3´) son realmente indistinguibles uno del otro. Por lo tanto los elementos de retardo pueden ser compartidos.
Esta particular implementación es llamada la Forma Directa II, y requiere la mitad de los elementos de retardo.

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Realizaciones en CascadaSi expresamos los polinomios del numerador y denominador de una función de transferencia, como el producto de polinomios de grado inferior, un filtro digital puede ser realizado como una conexión en cascada de filtros de orden inferior. Considere por ejemplola cual puede ser implementada en alguna de 36 formas diferentes, basados en la
ordenación de polos, ceros y la factorización de estos
Si fuéramos a implementar estas estructurasusando componentes de hardware de precisiónInfinita, estos deberán resultar en realización de filtros idénticos. Sin embargo, cada una de ellas sonfiltros diferentes debido a los efectos de longitud depalabra finita.
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
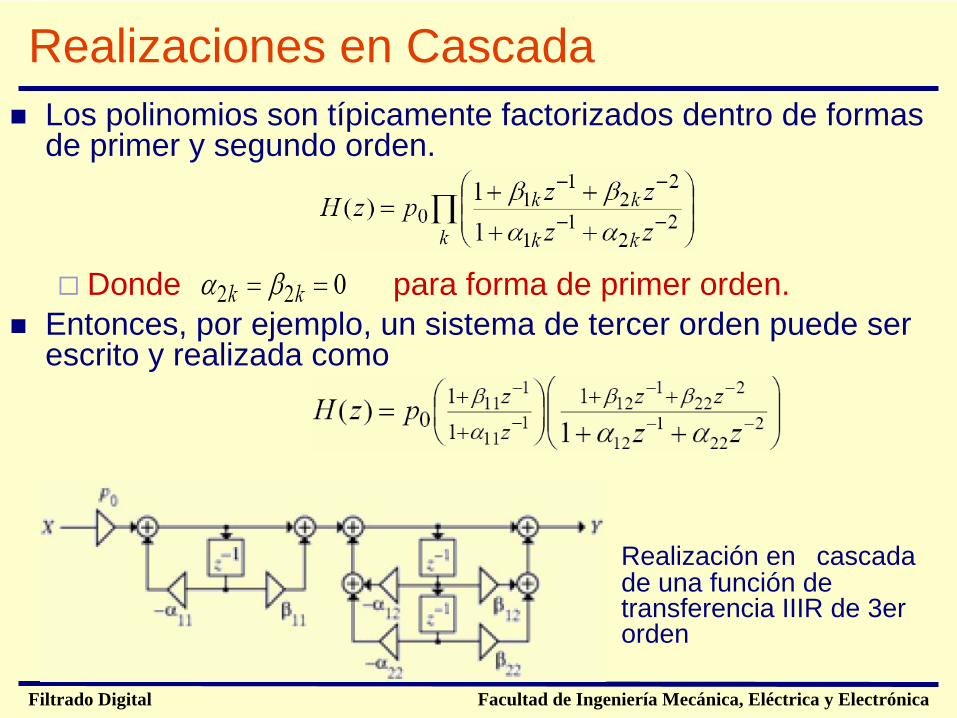
Realizaciones en CascadaLos polinomios son típicamente factorizados dentro de formas de primer y segundo orden.
Donde para forma de primer orden. Entonces, por ejemplo, un sistema de tercer orden puede ser escrito y realizada como
Realización en cascada de una función de transferencia IIIR de 3er orden

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
EjemploRealizaciones de la forma directa II y en cascada:
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
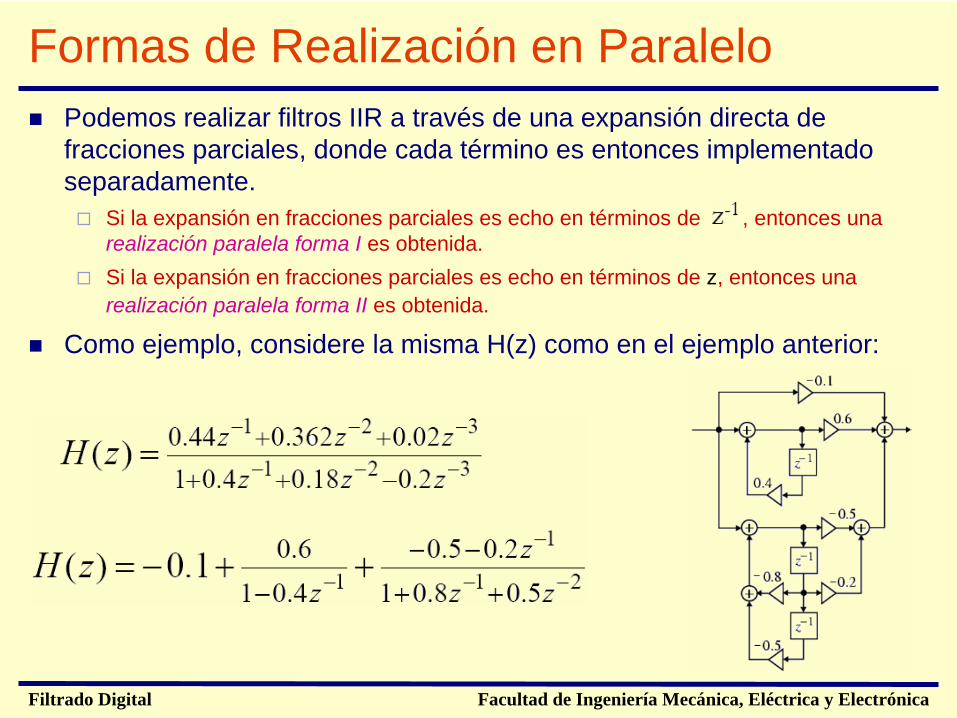
Formas de Realización en ParaleloPodemos realizar filtros IIR a través de una expansión directa de fracciones parciales, donde cada término es entonces implementado separadamente.
Si la expansión en fracciones parciales es echo en términos de , entonces una realización paralela forma I es obtenida.Si la expansión en fracciones parciales es echo en términos de z, entonces una realización paralela forma II es obtenida.
Como ejemplo, considere la misma H(z) como en el ejemplo anterior:

Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Realizaciones en forma paralelaPara una implementación en forma paralela II:
Filtrado Digital Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
FIN


















