PROBLEMAS DE ÁLGEBRA II - 1ER … · PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTRE...
79
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTRE HTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR Í NDICE Parte 1. Teoría básica 2 Endomorfismos vectoriales con significado geométrico 3 Diagonalización de matrices 4 Matrices diagonalizables 5 Definiciones que aparecen en exámenes de años anteriores 6 Parte 2. Espacios vectoriales y Endomorfismos lineales 7 1. Espacios vectoriales y aplicaciones lineales 7 1.1. Problemas tipo 7 2. Proyecciones y Simetrías vectoriales 7 2.1. Problemas tipo 8 3. Formas de Jordan de endomorfismos lineales 12 3.1. Problemas tipo 13 4. Subespacios vectoriales invariantes 19 4.1. Problemas tipo 19 Parte 3. Espacio afín y Endomorfismos afines 21 5. Subespacios afines 21 5.1. Problemas tipo 21 6. Endomorfismos afines 23 6.1. Problemas tipo 23 7. Proyecciones y simetrías afines 29 7.1. Problemas tipo 34 8. Homotecias afines y dilataciones 47 8.1. Problemas tipo 49 9. Clasificación de endorfismos afines 57 9.1. Problemas tipo 57 Índice alfabético 79 1
Transcript of PROBLEMAS DE ÁLGEBRA II - 1ER … · PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTRE...
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM
XAVIER AZNAR
ÍNDICE
Parte 1. Teoría básica 2
Endomorfismos vectoriales con significado geométrico 3
Diagonalización de matrices 4
Matrices diagonalizables 5
Definiciones que aparecen en exámenes de años anteriores 6
Parte 2. Espacios vectoriales y Endomorfismos lineales 7
1. Espacios vectoriales y aplicaciones lineales 7
1.1. Problemas tipo 7
2. Proyecciones y Simetrías vectoriales 7
2.1. Problemas tipo 8
3. Formas de Jordan de endomorfismos lineales 12
3.1. Problemas tipo 13
4. Subespacios vectoriales invariantes 19
4.1. Problemas tipo 19
Parte 3. Espacio afín y Endomorfismos afines 21
5. Subespacios afines 21
5.1. Problemas tipo 21
6. Endomorfismos afines 23
6.1. Problemas tipo 23
7. Proyecciones y simetrías afines 29
7.1. Problemas tipo 34
8. Homotecias afines y dilataciones 47
8.1. Problemas tipo 49
9. Clasificación de endorfismos afines 57
9.1. Problemas tipo 57
Índice alfabético 791

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNARParte 1. Teoría básica1
Definición 1. Aplicación linealSean V,W dos espacios vectoriales sobre un cuerpo K. Una función
f : V 7→W se dice que es una aplicación lineal si verifica:
1. Para u, v ∈ Vf (u+ v) = f (u) + f (v)
2. Para todo u ∈ V y todo escalar α ∈ K
f (αu) = αf (u)
Propiedades
1. Dada una aplicación f : V 7→ W entre dos espacios vectoriales, se
dice que f es lineal si y sólo si
f (αu+ βv) = αf (u) + βf (v)
para todo par de vectores u, v ∈ V y para todo par de escalares K.
2. Si f : V 7→W es una aplicación lineal, entonces f (0V ) = 0W .
Definición 2. Núcleo e imagenDada una aplicación lineal f : V 7→ V se llama núcleo de f al conjunto
de vectores de V
ker f = {v ∈ V | f (v) = 0}
La imagen de la aplicación f es el conjunto de vectores de W
Imf = {w ∈W | ∃v ∈ V, f (v) = w} = {f (v) |v ∈ V }
Propiedades
1. Si f : V 7→W es una aplicación lineal, entonces
ker f ≤ V
Imf ≤ W
2. Si f : V 7→W es una aplicación lineal, y
B = {v1, . . . , vn}
es una base o sistema generador de V se tiene que
f (B) = {f (v1) , . . . , f (vn)}
es un sistema generador de Imf .
1Parte de los apuntes de esta sección se basan en los de la web del Dptode Matemática Aplicada y Estadística de la Universidad Politécnica de Cartagena.http://www.dmae.upct.es/~plgomez/archivos %20docencia/teoria2009-10/
2

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Proposición 3. Tipos de aplicaciones lineales.Sea f : V 7→W una aplicación lineal. Entonces:
1. f es inyectiva si y sólo si ker f = 0
2. f es suprayectiva si y sólo si dim (Im (f)) = dimW .3. f es biyectiva si y sólo si dim (Im (f)) = dimW y ker f = 0.
Proposición 4. Fórmula de las dimensionesSi una aplicación f : V 7→W es lineal, entonces cumple que
dim (ker f) + dim (Imf) = dimV
Definición 5. Matrices semejantes Dos matrices cuadradas del mismo
tamaño A,A′ se dice que son semejantes cuando existe una matriz inver-
tible Q que cumple
A′ = Q−1AQ
Dos matrices son semenjantes si y sólo si van asociadas al mismo en-
domorfismo.
ENDOMORFISMOS VECTORIALES CON SIGNIFICADO GEOMÉTRICO
Definición 6. HomoteciaSea V un espacio vectorial euclídeo y α ∈ R. Se llama homotecia de
razón α a la aplicación lineal
hα : V 7→ V
hα (v) = αv ∀v ∈ V
Definición 7. ProyecciónSea V un espacio vectorial euclídeo y sean B y D subespacios de V
tales que V = B ⊕ D . Se llama proyección de base B y dirección D a la
aplicación lineal π definida por
π : V 7→ V
v =
π (v) = v v ∈ B
π (v) = 0 v ∈ D
Definición 8. SimetríaSea V un espacio vectorial euclídeo y sean B y D subespacios de V tales
que V = B ⊕D . Se llama simetría de base B y dirección D a la aplicación
lineal σ definida por
σ : V 7→ V
v =
σ (v) = v v ∈ B
σ (v) = −v v ∈ D3
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Definición 9. Rotaciones en el planoEn R2 se llama giro de ángulo θ ∈ [0, 2π] a la aplicación lineal ρθ : R2 7→ R2
cuya matriz asociada a la base canónica de R2 es(cos θ − sin θ
sin θ cos θ
)
DIAGONALIZACIÓN DE MATRICES
Definición 10. Autovalores y autovectoresSea A una matriz cuadrada de orden n, λ un escalar del cuerpo y v un
vector columna no nulo del espacio vectorial Rn. Si se cumple
Av = λv
entonces se dirá que λ es un valor propio o autovalor de A y que v es un
vector propio o autovector de A. Se dice que λ es el valor propio de A
asociado al vector propio v.
Sea λ un escalar del cuerpo y M una matriz cuadrada de orden n. En-
tonces λ es un valor propio de M si y sólo si existe un vector no nu-
lo v ∈ Rn tal que Mv = λv. Ahora bien, la igualdad anterior equivale
a Mv − λv = 0, (M − λid) (v) = 0, lo que significa que v ∈ ker (M − λid).
De manera que λ es un valor propio si y sólo si ker (M − λid) 6= 0. Y co-
mo dim (ker (M − λid)) = n − rango (M − λid), lo anterior equivale a que
rango (M − λid) < n. Finalmente, esta última condición puede traducirse
en que |M − λid| = 0. En definitiva obtenemos que
λ ∈ R es un valor propio de M ⇐⇒ |M − λid| = 0
Definición 11. Polinomio característicoSi M es una matriz cuadrada de orden n se llama polinomio caracte-
rístico de M al polinomio
χM (λ) = |M − λid|
El polinomio es de grado n y sus raíces son los valores propios de la
matriz M .
Se llama multiplicidad de λ como valor propio a la multiplicidad que
tiene como raíz del polinomio característico. La suma de las multiplicida-
des de los valores propios de una matriz es, como mucho, igual al grado
del polinomio característico (es decir, al tamaño de la matriz).
Observación 12. Los valores propios de una matriz triangular (superior o
inferior) son los elementos de la diagonal principal.4
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Proposición. Dos matrices semejantes tienen el mismo polinomio caracte-rístico.
Dos matrices semejantes tienen los mismos valores propios y las mismasmultiplicidades.
Definición 13. Subespacio propioDado un valor propio λ de una matriz cuadrada M , llamamos subespa-
cio propio de la matriz M asociada al valor propio λ a
Nλ = ker (M − λid) = {v ∈ Kn| (M − λid) (v) = 0} = {v ∈ Kn|Mv = λv}
El subespacio propio de la matriz M asociado al valor propio λ está
formado por todos los vectores propios de la matriz M asociados al valor
propio λ, además del vector 0.
PropiedadesPara cada valor propio λ de una matriz cuadrada M de orden n se tiene:
1. ker (M − λid) 6= 0, es decir, dim (ker (M − λid)) ≥ 1.
2. dim (ker (M − λid)) ≤ m (λ) (multiplicidad del valor λ)
3. dim (ker (M − λid)) = n− rango (M − λid).
PropiedadLos vectores propios asociados a distintos valores propios son lineal-
mente independientes, o dicho de otro modo, la suma de los subespaciospropios es directa. Esto se traduce en que la unión de bases de cada subes-
pacio propio resulta ser una base de la suma de los subespacios propios.
MATRICES DIAGONALIZABLES
Una matriz cuadrada se dice que es diagonalizable si es semejante a
una matriz diagonal. Un endomorfismo Rn es diagonalizable si la matriz
asociada respecto de alguna base del espacio es una matriz diagonal. En
ambos casos la matriz diagonal se llamará matriz diagonal asociada, y
su diagonal principal estará formada por los valores propios de la matriz
M (o del endomorfismo f ). Esta matriz no tiene por qué ser única, pues
depende del orden que elijamos para los valores propios.
Afirmación 14. Un endomorfismo (o una matriz) es diagonalizable si y sólo
si existe una base del espacio vectorial formada por vectores propios del
endomorfismo (o de la matriz).
Cuando tengamos una matriz M diagonalizable, tendremos
M = PDP−1
5
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
donde D es una matriz diagonal y P es una matriz invertible. A D la lla-
maremos matriz diagonal semejante a A y a P y a su inversa matrices depaso o matrices de cambio de base.
Afirmación 15. Una matriz cuadrada M de orden n con coeficientes sobre
el cuerpo R es diagonalizable sobre el cuerpo si y sólo si Rn es la suma
(directa) de todos los subespacios propios de la matriz si y sólo si la suma
de dichos subespacios propios es n. Por tanto, la base de vectores propios
se puede hallar uniendo las bases de cada uno de los subespacios propios
de M .
Afirmación 16. Sea M una matriz cuadrada de orden n con coeficientes
sobre el cuerpo R. Entonces M es diagonalizable sobre el cuerpo si y sólo
si se verifican las siguientes condiciones:
1. El polinomio característico χM tiene sólo raíces reales. Esto equivale
a que la suma de las multiplicidades de todos los vectores propios
de la matriz es n.
2. Para cada valor propio λ de la matriz M se tiene que
dim (ker (M − λid)) = m (λ)
Observación 17. Si λ es un valor propio de M tal que m (λ) = 1, entonces
dim (ker (M − id)) = 1
a consecuencia de
1 ≤ dim (ker (M − λid)) ≤ m (λ) = 1
Afirmación 18. Sea M una matriz cuadrada de orden n con coeficientes
sobre el cuero R. Si M posee n valores propios con multiplicidad 1 en R,
entonces M es diagonalizable sobre R.
DEFINICIONES QUE APARECEN EN EXÁMENES DE AÑOS ANTERIORES
Espacio afín:Sistema de referencia afín:Sistema de referencia cartesiano:
Afirmación 19. Polinomios mínimos de endomorfismos comunes:
Endorfismo nulo: El polinomio mínimo del endorfismo nulo es φf (t) =
t
Homotecia vectorial: f = λid, λ 6= {0, 1} se caracterizan por el poli-
nomio mínimo φf (t) = t− λ6
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Simetría vectorial: Un endomorfismo f 6= ±id es simetría vectorial
(f2 = id) si y sólo si su polinomio mínimo es φf (t) = (t+ 1)(t− 1)
Proyección: Un endormorfismo f 6= 0 es proyección (f2 = f ) si y sólo
si su polinomio mínimo es φf (t) = t(t− 1)
Proposición 20. Supuesto Vf descompuesto en suma directa Vf = U1⊕· · ·⊕Ur y denotando fi = fui se tiene:
χf = χf1 · · ·χfrφ = m.c.m (φf1 , . . . , φfr )
donde χ y φ indican respectivamente, polinomio característico y polinomiomínimo.
Si el polinomio mínimo φf coincide con el polinomio característico χf , en-
tonces f es diagonalizable.
Parte 2. Espacios vectoriales y Endomorfismos lineales
1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Ecuaciones implícitas y paramétricas, sistema generador y base de un
espacio vectorial. Dimensión de un espacio vectorial.
1.1. Problemas tipo. Pendiente!!
2. PROYECCIONES Y SIMETRÍAS VECTORIALES
Definición 21. ProyecciónUna proyeccion π de un espacio vectorial V es un endomorfismo cuya
acción consiste en proyectar los vectores de V sobre el subespacio vecto-
rials denominado base de la proyección B, con una determinada dirección
correspondiente a un subespacio vectorial D, complementario a B. Asi,
sobre los vectores de la base, π se comporta como la identidad:
π (−→v ) = −→v ∀−→v ∈ B ⇒ B = Im (π)
y los vectores de la direccion se proyectan por π en el vector−→0
π (−→w ) =−→0 ∀−→w ∈ D ⇒ D = ker (π)
Como B = Im (π), π2 = π, es decir, la acción reiterada de una proyección
tiene el mismo efecto que la primera transformación.
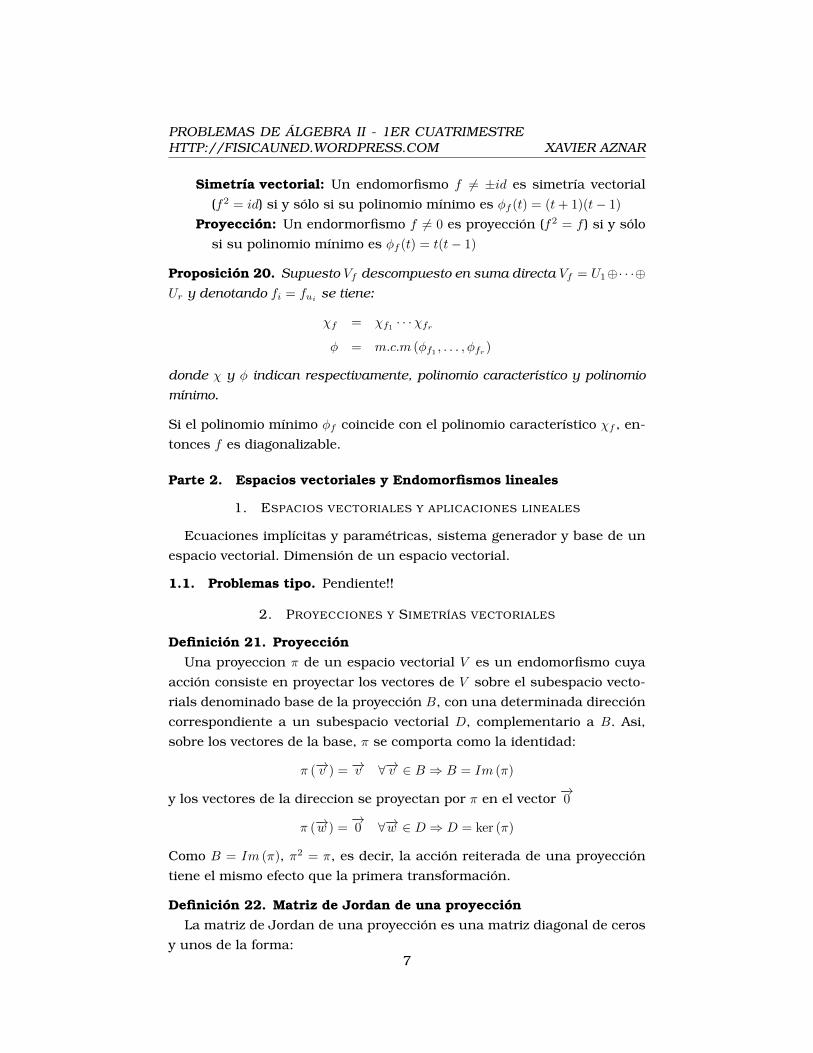
Definición 22. Matriz de Jordan de una proyecciónLa matriz de Jordan de una proyección es una matriz diagonal de ceros
y unos de la forma:7
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Jπ =
1 0 · · · 0 0 · · · 0
0 1 · · ·...
......
.... . .
(r) ......
...
0 · · · 1 0 · · · 0
0 · · · · · · 0 0 · · · 0
......
.... . .
(s) ...
0 · · · · · · 0 0 · · · 0
donde r es la dimensión de la base y s la dimensión de la direccion.
Definición 23. SimetríaUna simetría σ de un espacio vectorial V es un endomorfismo que trans-
forma cada vector −→v ∈ V en el vector simétrico a −→v respecto a una base B
y con una direccion determinada D. El subespacio vectorial B es la base
de la simetría. La acción de σ deja invariantes los vectores que están en la
base
σ (−→v ) = −→v ∀−→v ∈ B ⇒ B = Im (σ)
El subespacio vectorial D es la dirección de la simetría y a los vectores de
D la accion de σ los transforma en su opuesto
σ (−→w ) = −−→w ∀−→w ∈ D ⇒ D = ker (σ + Id)
donde Id denota la apliación identidad.
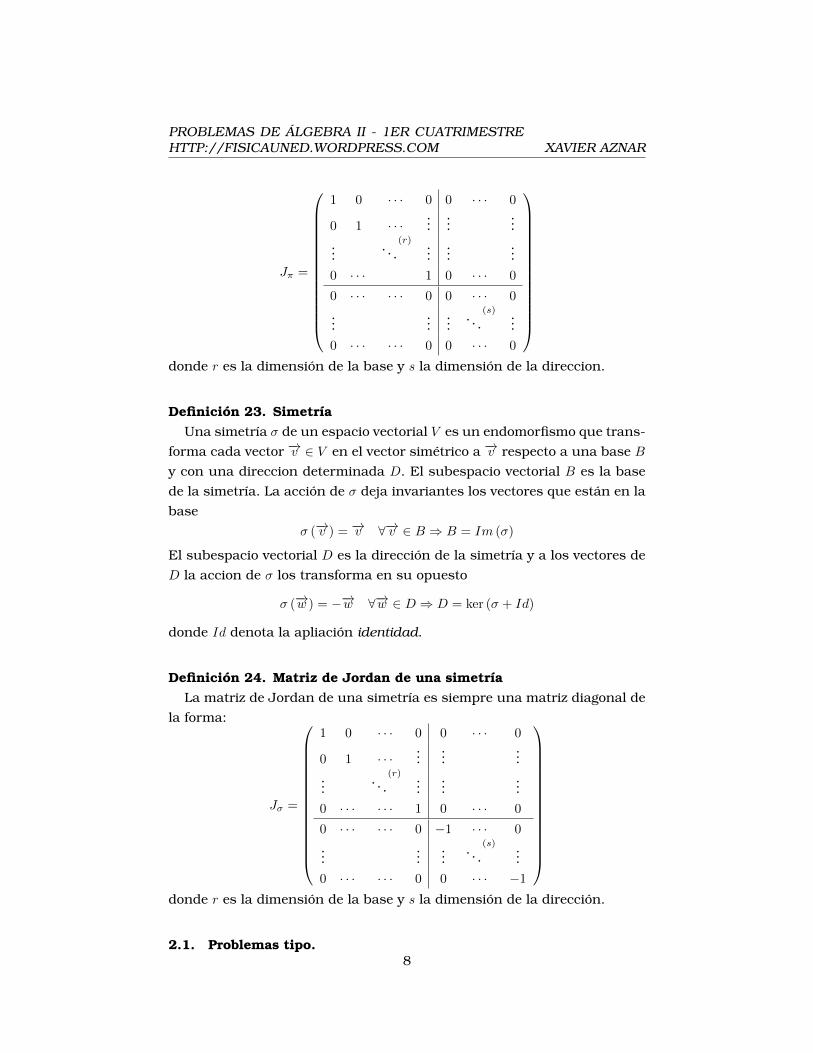
Definición 24. Matriz de Jordan de una simetríaLa matriz de Jordan de una simetría es siempre una matriz diagonal de
la forma:
Jσ =
1 0 · · · 0 0 · · · 0
0 1 · · ·...
......
.... . .
(r) ......
...
0 · · · · · · 1 0 · · · 0
0 · · · · · · 0 −1 · · · 0
......
.... . .
(s) ...
0 · · · · · · 0 0 · · · −1
donde r es la dimensión de la base y s la dimensión de la dirección.
2.1. Problemas tipo.8

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Ejercicio 25. Sea ε una base canónica de V3 (R), de dimensión 3. Sean
B := (x2 = 0)
D := (x1 = 0, x2 + x3 = 0)
Hallar las matrices de la proyección π y la simetría σ con base B y direccion
D.
1. Hallar la forma de Jordan Jπ de π y Jσ de σ.
2. Hallar una base ε′π tal que Mε′ (π) = Jπ.
Demostración. Para una proyección π
π (~v) = ~v ∀~v ∈ B B = Im (π)(2.1)
π (~w) = 0 ∀~w ∈ D D = ker (π)(2.2)
Para una simetría
σ (~v) = ~v ∀~v ∈ B B = Im (π)(2.3)
σ (~w) = −~w ∀~w ∈ D D = ker (σ + Id)(2.4)
Empezamos obteniendo una base para B y D.
x2 = 0
x1 = α⇒ B = 〈(1, 0, 0) , (0, 0, 1)〉
x3 = β
x1 = 0
x2 = −x3 ⇒ D = 〈(0, 1,−1)〉
x3 = α
Ahora vamos a plantear las ecuaciones derivadas de las propiedades de
las proyecciones y simetrías para obtener los coeficientes de las matrices
Mε (π) y Mε (σ). Empezamos con la proyección π
Mε (π) =
a b c
d e f
g h i
9
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
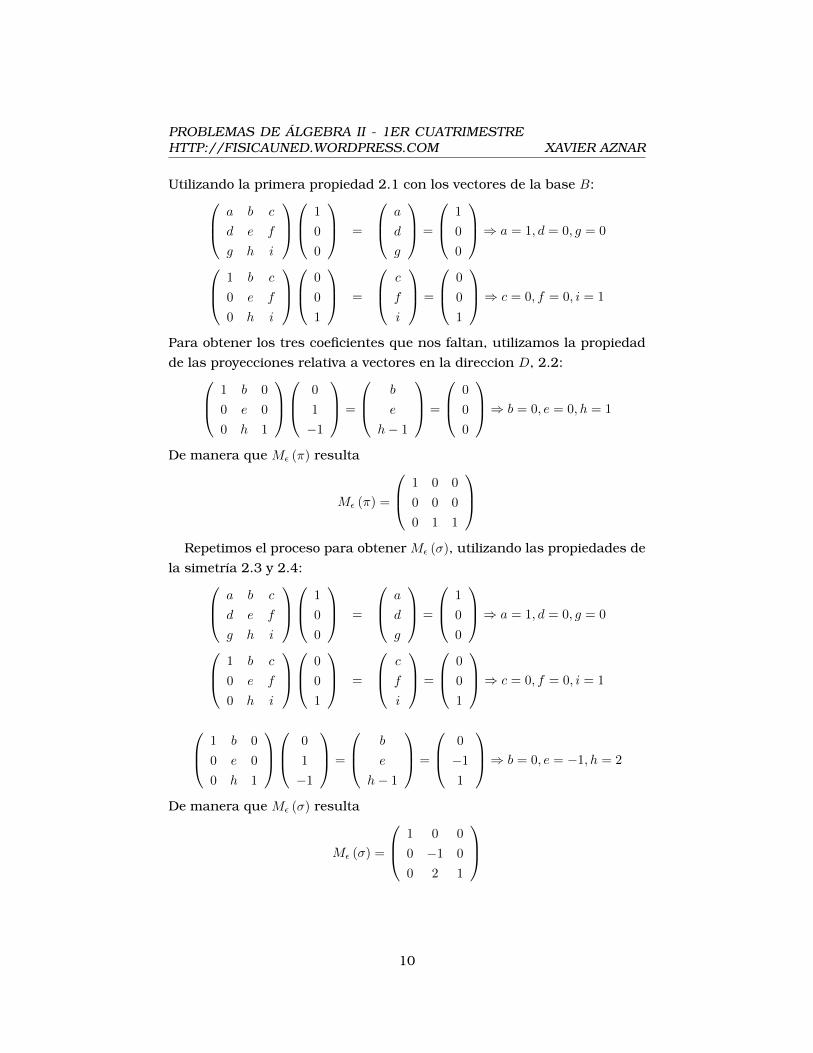
Utilizando la primera propiedad 2.1 con los vectores de la base B: a b c
d e f
g h i
1
0
0
=
a
d
g
=
1
0
0
⇒ a = 1, d = 0, g = 0
1 b c
0 e f
0 h i
0
0
1
=
c
f
i
=
0
0
1
⇒ c = 0, f = 0, i = 1
Para obtener los tres coeficientes que nos faltan, utilizamos la propiedad
de las proyecciones relativa a vectores en la direccion D, 2.2: 1 b 0
0 e 0
0 h 1
0
1
−1
=
b
e
h− 1
=
0
0
0
⇒ b = 0, e = 0, h = 1
De manera que Mε (π) resulta
Mε (π) =
1 0 0
0 0 0
0 1 1
Repetimos el proceso para obtener Mε (σ), utilizando las propiedades de
la simetría 2.3 y 2.4: a b c
d e f
g h i
1
0
0
=
a
d
g
=
1
0
0
⇒ a = 1, d = 0, g = 0
1 b c
0 e f
0 h i
0
0
1
=
c
f
i
=
0
0
1
⇒ c = 0, f = 0, i = 1
1 b 0
0 e 0
0 h 1
0
1
−1
=
b
e
h− 1
=
0
−1
1
⇒ b = 0, e = −1, h = 2
De manera que Mε (σ) resulta
Mε (σ) =
1 0 0
0 −1 0
0 2 1
10

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
La forma de Jordan de una proyección y una simetría depende sólo de
las dimensiones de la base y de la dirección, de manera que:
dimBπ = 2,dimDπ = 1 ⇒ Jπ =
1 0 0
0 1 0
0 0 0
dimBπ = 2,dimDπ = 1 ⇒ Jσ =
1 0 0
0 1 0
0 0 −1
Ahora vamos a buscar los vectores de la base ε′ . Las columnas de
la matriz de Jordan son las imágenes de los vectores de esa base ε′, de
manera que
Jπ (e′1) = e′1 ⇒ e′1 ∈ Im (〈e′1, e′2〉) = B
Jπ (e′2) = e′2 ⇒ e′2 ∈ Im (〈e′1, e′2〉) = B
Jπ (e′3) = ~0⇒ e′3 ∈ ker (〈e′3〉) = D
Es decir, los vectores e′1 y e′2 forman parte de la base de B, por lo que
podemos elegir directamente {(1, 0, 0) , (0, 0, 1)}. De la misma manera, e′3forma parte de la dirección D, por lo que elegimos {(0, 1,−1)}. La base
ε′ = {(1, 0, 0) , (0, 0, 1) , (0, 1,−1)}. �
Ejercicio 26. Sea V3 (R) un espacio vectorial de dimensión 3. Sea ε una
base de V3 (R). Sea B un subespacio de V3 con ecuación
B := (x1 + 2x2 + x3 = 0)
1. Hallar la matriz respecto a ε de la simetría σ con base B y dirección
D tal que
σ
0
1
0
=
−1
0
−1
2. Dar las ecuaciones respecto a ε de la dirección de σ.
Demostración. Sabemos que la simetría σ deja invariantes los vectores de
la base B, de manera que σ (~v) = ~v ∀~v ∈ B. Empezamos buscando una
base de B.
x1 = −2x2 − x3 ⇒ x1 = −2α− β
x2 = α
x3 = β11
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
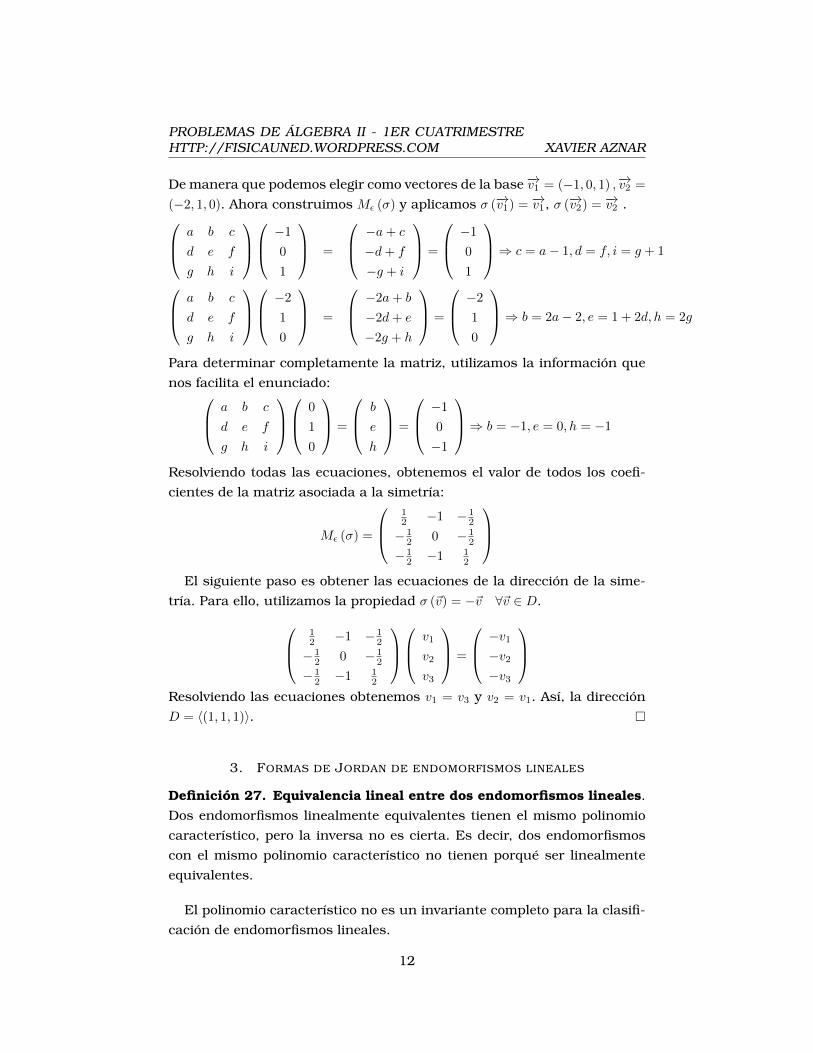
De manera que podemos elegir como vectores de la base −→v1 = (−1, 0, 1) ,−→v2 =
(−2, 1, 0). Ahora construimos Mε (σ) y aplicamos σ (−→v1) = −→v1, σ (−→v2) = −→v2 . a b c
d e f
g h i
−1
0
1
=
−a+ c
−d+ f
−g + i
=
−1
0
1
⇒ c = a− 1, d = f, i = g + 1
a b c
d e f
g h i
−2
1
0
=
−2a+ b
−2d+ e
−2g + h
=
−2
1
0
⇒ b = 2a− 2, e = 1 + 2d, h = 2g
Para determinar completamente la matriz, utilizamos la información que
nos facilita el enunciado: a b c
d e f
g h i
0
1
0
=
b
e
h
=
−1
0
−1
⇒ b = −1, e = 0, h = −1
Resolviendo todas las ecuaciones, obtenemos el valor de todos los coefi-
cientes de la matriz asociada a la simetría:
Mε (σ) =
12 −1 − 1
2
− 12 0 − 1
2
− 12 −1 1
2
El siguiente paso es obtener las ecuaciones de la dirección de la sime-
tría. Para ello, utilizamos la propiedad σ (~v) = −~v ∀~v ∈ D.12 −1 − 1
2
− 12 0 − 1
2
− 12 −1 1
2
v1
v2
v3
=
−v1
−v2
−v3
Resolviendo las ecuaciones obtenemos v1 = v3 y v2 = v1. Así, la dirección
D = 〈(1, 1, 1)〉. �
3. FORMAS DE JORDAN DE ENDOMORFISMOS LINEALES
Definición 27. Equivalencia lineal entre dos endomorfismos lineales.
Dos endomorfismos linealmente equivalentes tienen el mismo polinomio
característico, pero la inversa no es cierta. Es decir, dos endomorfismos
con el mismo polinomio característico no tienen porqué ser linealmente
equivalentes.
El polinomio característico no es un invariante completo para la clasifi-
cación de endomorfismos lineales.
12

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Definición 28. El polinomio característico de un endomorfismo f , re-
presentado por Mε (f) sobre una cierta base ε se define como:
χf (λ) = det (Mε − λId)
Si el cuerpo K =R los valores propios del endomorfismo deben ser
reales. Si obtenemos valores propios λ = α+ iβ, entonces la caja asociada
al valor propio es de la forma: (α −ββ α
)En este caso, no existen autovectores asociados a los autovalores complejo
conjugados.
Si el cuerpo es K = C, entonces se admiten valores propios imaginarios,
con sus correspondientes autovectores asociados.
Afirmación 29. El rango de la matriz que representa un endomorfismo es
un invariante lineal.
Ejemplo 30. Es decir, rg (f − I) = rg (Jf − I). Esto nos permite obtener los
valores de ε a colocar bajo las cajas de Jordan si conocemos el rango de
f − I, por ejemplo.
3.1. Problemas tipo.
Ejercicio 31. Sea V3 (R) un espacio vectorial con una base ε . Sea f un
endomorfismo tal que
Mε (f) =
1 0 1
−6 3 −7
−2 0 −1
1. Hallar la matriz de Jordan Jf de f .
2. Hallar una base ε′ tal que Mε′ (f) = Jf
Demostración. Empezamos buscando el polinomio característico χf (λ) =
det (M − λId)
χf (λ) =
∣∣∣∣∣∣∣1− λ 0 1
−6 3− λ −7
−2 0 −1− λ
∣∣∣∣∣∣∣ = (3− λ)(1 + λ2
)Buscamos las raíces, que corresponden a los valores propios de f . Te-
nemos λ = 3 con multiplicidad 1 y λ = ±i, complejos conjugados. Como
estamos sobre un cuerpo real, los valores complejos no son aceptables. En13

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
este caso, la caja de Jordan asociada a un valor propio del tipo λ = α + iβ
es de la forma (α −ββ α
)Así, Jf resulta
Jf =
3 0 0
0 0 −1
0 1 0
El siguiente paso es encontrar los vectores de una base ε′ en los que la
matriz de f sea la matriz de Jordan.
Las columnas de la matriz Jf son las imágenes de los vectores de esta
base ε′, por lo que podemos escribir las siguientes ecuaciones 2:
f (e′1) = 3e′1 ⇒ (f − 3Id) (e′1) = ~0⇒ e′1 ∈ ker (f − 3Id)
f (e′2) = e′3 ⇒ e′3 = f (e′2) = f (−f (e′3)) = −f2 (e′3)⇒(f2 + Id
)(e′3) = ~0
⇒ e′3 ∈ ker(f2 + Id
)f (e′3) = −e′2 ⇒ e′2 = −f (e′3)
Empezamos con el primer vector de la base e′1, e′1 ∈ ker (f − 3Id):
ker (f − 3Id) =
−2 0 1
−6 0 −7
−2 0 −4
x
y
z
=
0
0
0
De donde
2x+ z = 0⇒ z = 0⇒ x = 0
Elegimos como e′1 = (0, 1, 0)
A continuación vamos con e′3, e′3 ∈ ker
(f2 + Id
)
f2 =
1 0 1
−6 3 −7
−2 0 −1
∗ 1 0 1
−6 3 −7
−2 0 −1
=
−1 0 0
−10 9 −20
0 0 −1
ker(f2 + Id
)=
0 0 0
−10 10 −20
0 0 0
x
y
z
=
0
0
0
De donde
y = x+ 2z
Elegimos z = 0, x = 1⇒ y = 1 y así e′3 = (1, 1, 0).
2En realidad deberíamos indicar explícitamente que los vectores de la base ε′ son{−→ei ′}, pero
por simplicidad los escribimos sin la flecha que indica que son un vector.
14

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Ahora sólo nos queda completar la base con e′2 = −f (e′3)
−
1 0 1
−6 3 −7
−2 0 −1
1
1
0
=
−1
3
2
�
Ejercicio 32. Sea V un espacio vectorial sobre K y ε una base de V .
Si dimV = 4 y g es un endomorfismo de V con polinomio característi-
co χg (t) = (t+ 2)2 (t2 − 2t+ 2
)tal que rg (g + 2Id) = 3, hallar la forma de
Jordan Jg para g si K = R y K = C.
Demostración. Empezamos buscando los valores propios
(t+ 2)2
= 0⇒ t = −2
es un autovalor con multiplicidad 2.
Por otro lado
t2 − 2t+ 2 = 0⇒ t = 1± i
Tenemos dos valores complejos conjugados.
Si K = R no se admiten valores complejos, por lo que la caja asociada a
un valor de la forma λ = α+ iβ es de la forma:(α −ββ α
)Para λ = −2, rg (g + 2Id) = 3 ⇒ dim (ker (g + 2Id)) = 4 − 3 = 1 < 2 (multi-
plicidad del valor propio), por lo que la caja de Jordan será de la forma:(−2 0
1 −2
)Así tenemos completamente determinada la forma de Jordan Jg para
K = R
JK=Rg =
−2 0 0 0
1 −2 0 0
0 0 1 −1
0 0 1 1
En el caso complejo K = C, los valores propios complejos son acepta-
bles, por lo que la forma de Jordan queda
JK=Cg =
−2 0 0 0
1 −2 0 0
0 0 1 + i 0
0 0 0 1− i
15

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
�
Ejercicio 33. Sea g un endomorfismo de V4 (K) con polinomio caracterís-
tico
χg (t) =(t2 + 1
)2tal que rg
(g2 + Id
)= 2 . Hallar la forma de Jordan de g para K = R y para
K = C.
Demostración. Empezamos calculando los autovalores del polinomio ca-
racterístico. Tenemos t = +i con multiplicidad 2 y t = −i con multiplicidad
2.
En el caso complejo, todos los autovalores son aceptables, por lo que la
forma de la matriz de Jordan Jg (C) será
Jg (C) =
i 0 0 0
ε1 i 0 0
0 0 −i 0
0 0 ε2 −i
con εi = {0, 1}, i = 1, 2. Para determinar los valores de εi utilizamos que el
rango es un invariante lineal, de manera que
rg(g2 + Id
)= rg
(J2g + Id
)Calculamos J2
g
J2g =
i 0 0 0
ε1 i 0 0
0 0 −i 0
0 0 ε2 −i
∗
i 0 0 0
ε1 i 0 0
0 0 −i 0
0 0 ε2 −i
=
−1 0 0 0
2iε1 −1 0 0
0 0 −1 0
0 0 −2iε2 −1
De manera que
rg(J2g + Id
)=
0 0 0 0
2iε1 0 0 0
0 0 0 0
0 0 −2iε2 0
= 2⇒ ε1, ε2 6= 0
Y la forma de la matriz de Jordan Jg (C) queda
Jg (C) =
i 0 0 0
1 i 0 0
0 0 −i 0
0 0 1 −i
16

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
En el caso de K = R, los valores complejos no son aceptables. Tenemos
un valor complejo conjugado de multiplicidad 2, λ = ±i. Cada autovalor
complejo de la forma λ = α+iβ da lugar a una caja de la forma
(α −ββ α
),
de manera que la forma de Jordan Jg (R) es
Jg (R) =
0 −1 0 0
1 0 0 0
0 ε 0 −1
0 0 1 0
Para determinar el valor de ε, utilizamos que rg (Jg + Id) = 2 (ya que el
rango es un invariante lineal).
rg(J2g + Id
)=
0 0 0 0
0 0 0 0
ε 0 0 0
0 ε 0 0
= 2⇒ ε 6= 0⇒ ε = 1
Y la forma de la matriz de Jordan Jg (R) queda:
Jg (R) =
0 −1 0 0
1 0 0 0
0 1 0 −1
0 0 1 0
�
Ejercicio 34. f un endomorfismo de V4 (R) con χf (t) = (t− 3)4 y con
dim (f − 3Id) = 2.
1. ¿Cuáles son las posibles formas de Jordan que puede tener f?
2. Determine un invariante que distinga las diferentes formas de Jor-
dan.
Demostración. Tenemos un autovalor t = 3 con multiplicidad 4.
La forma general de la matriz de Jordan Jf es
Jf =
3 0 0 0
ε1 3 0 0
0 ε2 3 0
0 0 ε3 3
Como la dimension es un invariante lineal y dim (ker (f − 3Id)) = dim (ker (Jf − 3Id)) =
2, tenemos
dim (ker (Jf − 3Id)) = 4− rg (ker (Jf − 3Id)) = 2⇒ rg (ker (Jf − 3Id)) = 217
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
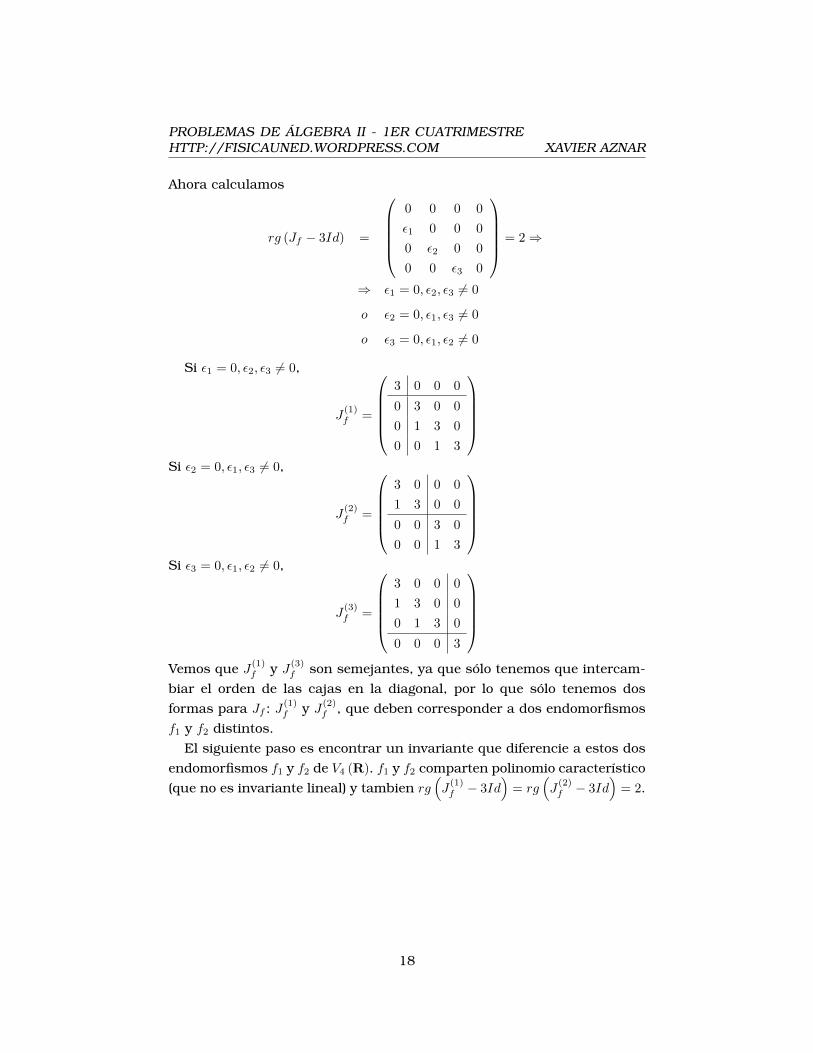
Ahora calculamos
rg (Jf − 3Id) =
0 0 0 0
ε1 0 0 0
0 ε2 0 0
0 0 ε3 0
= 2⇒
⇒ ε1 = 0, ε2, ε3 6= 0
o ε2 = 0, ε1, ε3 6= 0
o ε3 = 0, ε1, ε2 6= 0
Si ε1 = 0, ε2, ε3 6= 0,
J(1)f =
3 0 0 0
0 3 0 0
0 1 3 0
0 0 1 3
Si ε2 = 0, ε1, ε3 6= 0,
J(2)f =
3 0 0 0
1 3 0 0
0 0 3 0
0 0 1 3
Si ε3 = 0, ε1, ε2 6= 0,
J(3)f =
3 0 0 0
1 3 0 0
0 1 3 0
0 0 0 3
Vemos que J (1)
f y J (3)f son semejantes, ya que sólo tenemos que intercam-
biar el orden de las cajas en la diagonal, por lo que sólo tenemos dos
formas para Jf : J(1)f y J (2)
f , que deben corresponder a dos endomorfismos
f1 y f2 distintos.
El siguiente paso es encontrar un invariante que diferencie a estos dos
endomorfismos f1 y f2 de V4 (R). f1 y f2 comparten polinomio característico
(que no es invariante lineal) y tambien rg(J
(1)f − 3Id
)= rg
(J
(2)f − 3Id
)= 2.
18

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Pero si calculamos
rg(J
(1)f − 3Id
)2
=
0 0 0 0
0 0 0 0
0 0 0 0
0 0 1 0
= 1
rg(J
(2)f − 3Id
)2
=
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
= 0
Por lo que el invariante lineal que distingue a los endomorfismos f1 y f2
de V4 (R) es el rg (f − 3Id)2. �
4. SUBESPACIOS VECTORIALES INVARIANTES
Teorema 35. Si H es un hiperplano de ecuación u1x1 + · · ·+ u4x4 = 0, H esinvariante por f1 si y sólo si (u1, · · · , u4) es autovector de J t1.
Definición 36. J y J t tienen el mismo polinomio característico, por lo que
también tienen los mismos autovalores.
4.1. Problemas tipo.
Ejercicio 37. Sea ε una base del espacio vectorial V3 (R). Sea f un endo-
morfismo tal que
Mε (f)) =
3 0 0
0 0 −1
0 1 0
Calcular las ecuaciones de los subespacios invariantes por f en la base ε.
Demostración. La matriz Mε (f) ya tiene forma de Jordan para el valor
propio real λ = 3 y para los valores complejo conjugados λ = ±i. Como sólo
tiene un valor único real simple, f tiene una recta invariante generada por
el autovalor asociado al autovalor λ = 3.
r := (x2 = 0, x3 = 0) = ker (f − 3id)
El número de hiperplanos invariantes -que en V3 (R) son planos- coin-
cide con el número de rectas invariantes, de manera que f sólo tiene un
plano invariante asociado a λ = ±i.
U := (x1 = 0) = ker(f2 + id
)�
19

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Ejercicio 38. Sea ε base de un espacio vectorial V4 (R) de dimensión 4.
Sea f un endomorfismo tal que
Mε (f) =
−2 0 0 0
1 −2 0 0
0 0 1 −1
0 0 −1 1
Dar las ecuaciones de los planos invariantes por f en la base ε.
Demostración. La matriz Mε (f) ya tiene forma de Jordan, compuesta por
cajas de orden 2.
C1 =
[−2 0
1 −2
]
C2 =
[1 −1
−1 1
]Cada una de estas cajas corresponde a un plano invariante por f .
U1 := (x3 = 0, x4 = 0) = ker (f + 2id)2
U2 := (x1 = 0, x2 = 0) = ker(
(id− λ)2
+ id)
= ker(f2 − 2f + 2id
)�
Ejercicio 39. Sea f un endomorfismo de V4 (R) donde en la base ε
Mε (f) =
−1 0 0 0
1 −1 0 0
0 0 0 −2
0 0 −2 0
Calcular las ecuaciones de los subespacios invariantes por f en la base ε.
Demostración. Vemos que Mε (f) ya que tiene la forma canónica de Jordan
en forma de cajas de orden 2.
C1 =
[−1 0
1 −1
]
C2 =
[0 −2
−2 0
]De la forma de la caja C1 vemos que tenemos un valor propio λ = −1.
rg (ker (f |C1+ id)) = rg
(−1 0
1 −1
)= 1⇒ dim (ker (f |C1
+ id)) = 2− 1 = 1
20

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Tenemos una recta invariante generada por el autovector asociado al au-
tovalor λ = −1.
ker (f |C1+ id) =
(−1 0
1 −1
)⇒ x1 = 0
De manera que la recta invariante es
r := (x1 = 0, x3 = 0, x4 = 0)
No tenemos más rectas invariantes.
Cada caja de orden 2 corresponde a un plano invariante por f .
C1 → U1 := (x3 = 0, x4 = 0) = ker (f + id)2
C2 → U2 := (x1 = 0, x2 = 0) = ker(f2 + 4id
)Los hiperplanos invariantes coinciden con el número de rectas invarian-
tes, de manera que tenemos un hiperplano invariante. Este hiperplano
está formado por la recta invariante r := (x1 = 0, x3 = 0, x4 = 0) y el plano
invariante U2, por lo que las ecuaciones del hiperplano es
H := (x1 = 0)
�
Parte 3. Espacio afín y Endomorfismos afines
Un espacio afín X tiene asociado, de forma natural, un espacio vectorial−→X . El espacio vectorial
−→X representa el espacio de las direcciones de X.
Un endomorfismo afín f de X tiene asociado un enfomorfismo lineal−→f que actúa en el espacio vectorial
−→X . La matriz del endorfismo afín f
contiene, como submatriz, la representación matricial del endomorfismo
lineal−→f : (
1 0
a−→f
)
5. SUBESPACIOS AFINES
5.1. Problemas tipo.
Ejercicio 40. Sea ε un sistema de referencia cartesiano de un espacio real
de dimensión 3 A3 (R) .Sean M,N y R subespacios afines con ecuaciones21

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
respecto a ε
M := (x1 = 0, x2 − x3 = −1)
N := (x1 = 2)
R := (x2 − x3 = −1)
P =
1
2
0
1
Calcular las ecuaciones y la dimensión del subespacio afín de A3 (R) ge-
nerado por todas las rectas que pasan por P y cortan M y N .
Demostración. Primero observamos que M ∩ N = ∅ y que P ∈ N , lo que
significa que las rectas que pasan por P ya cortan N . Así que el problema
se reduce a encontrar las rectas que pasan por P y que cortan M .
Como M es una recta y P /∈ M , el subespacio afín que buscamos será
el plano Π que contiene la recta M y el punto P .
Si Π es un plano, su dimensión será 2
dim Π = 2
Podemos escribir Π como Π = P +−−→PQ +
−→M , donde Q ∈ M es un pun-
to cualquiera de la recta y−→M es el vector director de la recta M . Como
M := (x1 = 0, x2 − x3 = −1) tenemos que−→M := (x1 = 0, x2 − x3 = 0) y pode-
mos tomar como vector director de la recta
−→M =
⟨ 0
1
1
⟩
Ahora, seleccionamos un punto cualquiera de M , como por ejemplo
Q =
1
0
0
1
y calculamos
−−→PQ
−−→PQ =
1
0
0
1
−
1
2
0
1
=
−2
0
0
22

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Así completamos la descripción del plano Π
Π =
1
2
0
1
+ λ
−2
0
0
+ µ
0
1
1
La ecuación de Π es
Π := (x3 − x2 = 1)
�
Ejercicio 41. Sean R1 y R2 dos rectas distintas de A3 (R), el espacio afín
real de dimensión 3. Demostrar que R1 y R2 son paralelas si y sólo si R1 y
R2 son coplanarias y disjuntas.
Demostración. Tenemos que demostrar que
R1 ‖ R2 ⇐⇒
R1, R2 Coplanarias
R1 ∩R2 = ∅ (Disjuntas)
Suponemos que R1 ‖ R2. En este caso, las dos tienen la misma dirección−→R . Es decir, que podemos escribir cada recta como
R1 = p1 +−→R
R2 = p2 +−→R
donde p1 /∈ R2, p2 /∈ R1 (pues R1 6= R2). Así, tienen que ser disjuntas. Si no
lo fueran, existiría un q ∈ R1 ∩R2, por lo que podríamos escribir
R1 = q +−→R = R2 ⇒ R1 = R2
Pero hemos quedado en que R1 6= R2, por lo que llegamos a contradicción
⇒ R1, R2 son disjuntas.
Ahora vamos que la afirmación de que si R1 ‖ R2, entonces son coplana-
rias. Para demostrar que R1 y R2 están en el mismo plano, construimos el
plano a partir del vector dirección de las rectas,−→R y del vector −−→p1p2, donde
R1 3 p1 /∈ R2 y R2 3 p2 /∈ R1, como antes. De manera que el plano afín Π
que contiene las dos rectas R1 y R2 y que demuestra que son coplanarias
es (ver figura 5.1):
Π = p2 +−−→p1p2 +−→R
�
6. ENDOMORFISMOS AFINES
6.1. Problemas tipo.23

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
FIGURA 5.1.
Ejercicio 42. Sea ε un sistema de referencia cartesiano de un espacio
real afín A3 (R) de dimensión 3. Sea M un subespacio afín con ecuaciones
respecto a ε
M := (x1 + x2 = 1)
Hallar la matriz del endorfismo f que satisface:
1. M es invariante por f .
2. La restricción de f a M es una traslación del vector
0
0
1
3. f
1
1
1
0
=
1
0
0
0
Demostración. Sabemos que la restricción de f a M es una traslación de
vector −→v . Entonces, la aplicación lineal asociada se comporta como la
identidad en el espacio vectorial−−→f |M =
−→id
El subespacio−→M tiene ecuaciones implícitas
−→M := (x1 + x2 = 0) por lo
que se trata de un plano vectorial generado por
−→M :=
⟨ 1
−1
0
,
0
0
1
⟩24

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Sea A la matriz de la aplicación lineal−→f . Como
−→f (−→v ) = −→v ∀−→v ∈
−→M ,
tenemos que
A =
a d g
b e h
c f i
a d g
b e h
c f i
1
−1
0
=
1
−1
0
=
a− db− ec− f
a d g
b e h
c f i
0
0
1
=
0
0
1
=
g
h
i
A =
a a− 1 0
b b+ 1 0
c c 1
⇒Mε (f) =
1 0 0 0
α a a− 1 0
β b b+ 1 0
γ c c 1
Si tomamos un punto p ∈M
p =
1
1
0
0
Entonces
f (p) = p+−→v =
1 0 0 0
α a a− 1 0
β b b+ 1 0
γ c c 1
1
1
0
0
=
1
α+ a
β + b
γ + c
=
1
1
0
0
+
0
0
1
=
1
1
0
1
α+ a = 1→ α = 1− a
β + b = 0→ β = −b
γ + c = 1→ γ = 1− c
Para determinar completamente Mε (f) utilizamos
f
1
1
1
0
=
1
0
0
0
25
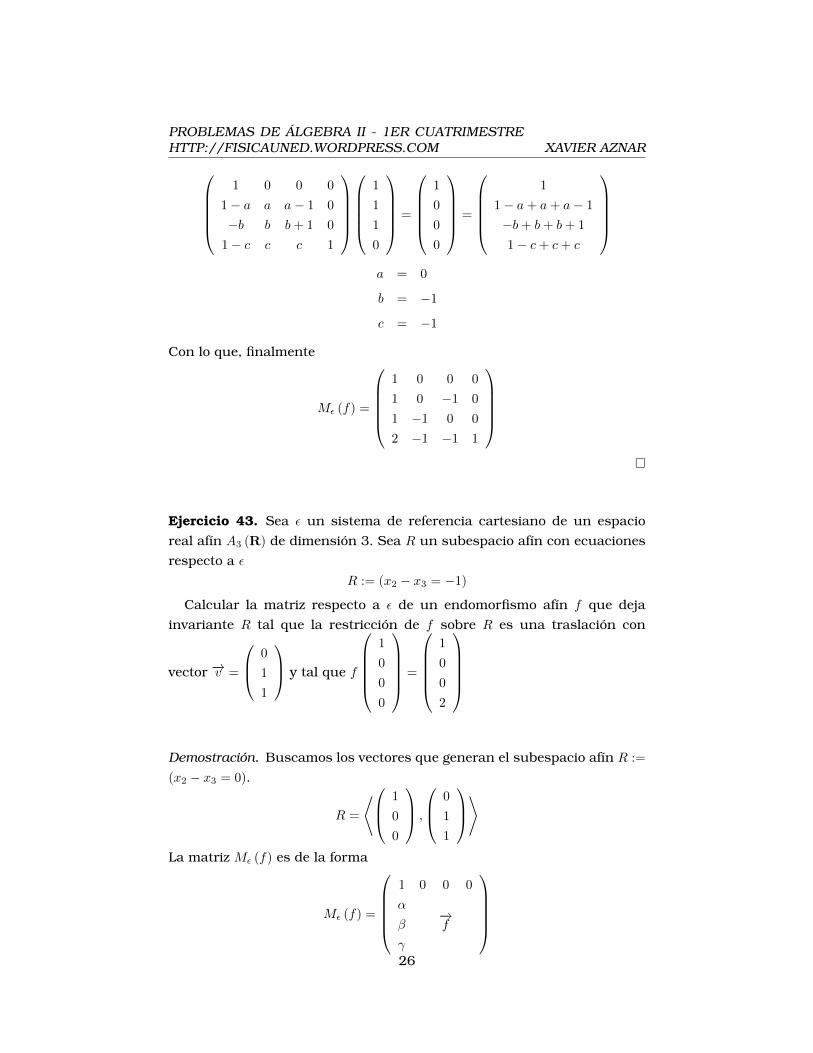
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
1 0 0 0
1− a a a− 1 0
−b b b+ 1 0
1− c c c 1
1
1
1
0
=
1
0
0
0
=
1
1− a+ a+ a− 1
−b+ b+ b+ 1
1− c+ c+ c
a = 0
b = −1
c = −1
Con lo que, finalmente
Mε (f) =
1 0 0 0
1 0 −1 0
1 −1 0 0
2 −1 −1 1
�
Ejercicio 43. Sea ε un sistema de referencia cartesiano de un espacio
real afín A3 (R) de dimensión 3. Sea R un subespacio afín con ecuaciones
respecto a ε
R := (x2 − x3 = −1)
Calcular la matriz respecto a ε de un endomorfismo afín f que deja
invariante R tal que la restricción de f sobre R es una traslación con
vector −→v =
0
1
1
y tal que f
1
0
0
0
=
1
0
0
2
Demostración. Buscamos los vectores que generan el subespacio afín R :=
(x2 − x3 = 0).
R =
⟨ 1
0
0
,
0
1
1
⟩
La matriz Mε (f) es de la forma
Mε (f) =
1 0 0 0
α
β−→f
γ
26

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Empezamos utilizando que el endomorfismo f deja invariante el subes-
pacio R a d g
b e h
c f i
1
0
0
=
1
0
0
=
a
b
c
1 d g
0 e h
0 f i
0
1
1
=
0
1
1
=
d+ g
e+ h
f + i
Es decir, de momento tenemos
−→f =
1 d −d0 e 1− e0 f 1− f
Ahora elegimos un punto del subespacio R ya que
−→f |R = τ−→v , de manera
que
f |R (p) = p+−→v
R 3 p =
1
0
0
1
−→v =
0
1
1
1 0 0 0
α 1 d −dβ 0 e 1− eγ 0 f 1− f
1
0
0
1
=
1
0
0
1
+
0
1
1
=
1
0
1
2
=
1
α− dβ + 1− eγ + 1− f
α = d
β = e
γ = 1 + f
De momento Mε (f)
Mε (f) =
1 0 0 0
d 1 d −de 0 e 1− e
1 + f 0 f 1− f
27

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Finalmente utilizamos f
1
0
0
0
=
1
0
0
2
1 0 0 0
d 1 d −de 0 e 1− e
1 + f 0 f 1− f
1
0
0
0
=
1
0
0
2
=
1
d
e
1 + f
d = 0
e = 0
f = 1
Así que al final hemos determinado completamente la forma de Mε (f)
Mε (f) =
1 0 0 0
0 1 0 0
0 0 0 1
2 0 1 0
�
Ejercicio 44. Sea ε un sistema de referencia cartesiano del espacio afín
real A3 (R) de dimensión 3. Sea f el endomorfismo afín con matriz
Mε (f) =
1 0 0 0
2 1 1 −1
2 0 2 −1
2 0 1 0
Demostrar que existe una familia de planos paralelos Πk sobre los que
f actúa como una traslación τ−→v . Calcular dicha familia de planos Πk y los
vectores −→vk.
Demostración. La restricción de f a los planos Πk los deja invariantes, es
decir que−−→f |Πk
=−→id ⇒
−−→f |Πk
(−→Πk
)=−→Πk ⇒
(−−→f |Πk
−−→id)(−→
Πk
)= 0
Es decir, que el subespacio vectorial formado por los planos paralelos−→Πk
está contenido o es igual al ker(−−→f |Πk
−−→id)
−→Πk ⊆ ker
(−−→f |Πk
−−→id)
28

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Así, vamos a calcular ker(−−→f |Πk
−−→id)
ker(−−→f |Πk
−−→id)
=
0 1 −1
0 1 −1
0 1 −1
x
y
z
=
0
0
0
⇒ y − z = 0
Ahora buscamos los vectores que generan este subespacio vectorial
ker(−−→f |Πk
−−→id)
=
⟨ 1
0
0
,
0
1
1
⟩−→Πk := (y − z = 0)
Por lo que los planos afines son
Πk := (y − z = k)
Si ahora elegimos un punto pk ∈ Πk, sabemos que el endorfismo actúa
como una traslación de vector −→v . Los puntos de Πk son de la forma
Πk 3 pk =
1
α
β
β − k
De manera que
f (pk) = pk +−→v1 0 0 0
2 1 1 −1
2 0 2 −1
2 0 1 0
1
α
β
β − k
=
1
2 + α+ β − β + k
2 + 2β − β + k
2 + β + k
=
1
α
β
β − k
+−→vk
Así que
−→vk =
2 + k
2 + k
2 + k
�
7. PROYECCIONES Y SIMETRÍAS AFINES
Definición 45. Sea ε un sistema de referencia cartesiano y τ~v una trasla-
ción de vector −→v , donde −→v =
v1
v2
v3
.
29

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
La matriz de la traslación τ−→v en la base ε, Mε (τ−→v ) es de la forma
Mε (τ−→v ) =
1 0 0 0
v1 1 0 0
v2 0 1 0
v3 0 0 1
Endomorfismos afínmente equivalentesDos endomorfismos afines f1 y f2 de un espacio afín X son afínmente
equivalentes si son conjugados por una transformación afín g de X. Es
decir, si existe g transformación afín de X tal que
f1 = g · f2 · g−1
Dos endomorfismos afínmente equivalentes admiten representaciones ma-
triciales cartesianas iguales, respecto a sistemas de referencia cartesianos
adecuadamente elegidos (y lo mismo recíprocamente).
Es decir:
Proposición 46. Sea ε un sistema de referencia cartesiano en el espacioafín X. Dos endomorfismos afines de X, f y f ′ son afínmente equivalentessi y sólo si existe ε′, sistema de referencia cartesiano de X tal que
Mε (f) = Mε′ (f ′)
Dos matrices A y A′ son afínmente equivalentes si existe P =
(1 0
p ~P
)de forma que A′ = P−1 · A · P . En particular, también se tiene que
−→A′ =
−−→P−1 ·
−→A ·−→P , por lo que la semejanza afín de las matrices A y A′ implica la
semejanza lineal de A y A′ y la de ~A y ~A′.
Todo endomorfismo afín f de X admite una representación matricial
respecto a algún sistema de referencia cartesiano ε=(e0,~ε) de la forma
J =
(1 0
0 ~J
)
donde ~J = M~ε
(~f)
es una matriz de Jordan. El origen e0 de ε es un punto
fijo para f , y ~ε es una base de Jordan para ~f . Se denomina a ε sistema dereferencia cartesiano de Jordan para f .
Corolario 47. Para todo endomorfismo afín f de X existe un sistema dereferencia cartesiano ε = (e0, ~e1, . . . , ~en) respecto al cual la matriz de f es de
30

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
la forma
J =
(C 0
0 J ′
)donde C =
1 0 · · · 0
1 1 · · · 0
0. . . . . .
...0 0 1 1
es una caja de Jordan
C es una caja de Jordan de orden r ≥ 1 y J ′ es una matriz de Jordan.Para el caso r = 1 se tiene C = (1), y f es endorfismo con puntos fijos.
Desde el punto de vista de la equivalencia lineal es indiferente el orden
en el que se distribuyan las cajas de Jordan de J , pero esto no sucede
exactamente así respecto a la equivalencia afín. Concretamente, el orden
r de la caja C = C (r) que ocupa el vértice superior izquierdo de la matriz
J es decisivo para determinar la clase de equivalencia afín de f .
Ejemplo 48. Sean f y f ′ endomorfismos de un espacio afín de dimen-
sión igual a dos. Supóngase que hemos encontrado sistemas de referen-
cia cartesianosε = (e0, ~e1, ~e2) y ε′ =(e′0,
~e′1,~e′2
)de forma que las matrices
Mε (f) = J,Mε′ (f ′) = J ′ son las siguientes:
J =
1 0 0
1 1 0
0 0 1
J ′ =
1 0 0
0 1 0
0 1 1
Estas matrices de Jordan son semejantes desde el punto de vista lineal,
ya que se obtiene una de otra por permutación de cajas. Sin embargo, los
endomorfismos afines f y f ′ no son afínmente equivalentes, ya que f ′ tiene
a e′0 como punto fijo y f carece de ellos. Las ecuaciones del subespacio de
puntos fijos de f en las coordenadas cartesianas inducidas por ε son:
J
1
x1
x2
=
1
x1
x2
=
1 +
1
x1
x2
que son claramente incompatibles.
Proposición 49. Si f es un endormorfismo afín de X que admite respectoa cierto sistema de referencia cartesiano ε una matriz
J =
(C (r) 0
0 J1
)con C (r) =
1 0 · · · 0 0
1 1 · · · 0 0...
. . . . . ....
...
0 0. . . 1 0
0 0 · · · 1 1
31
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
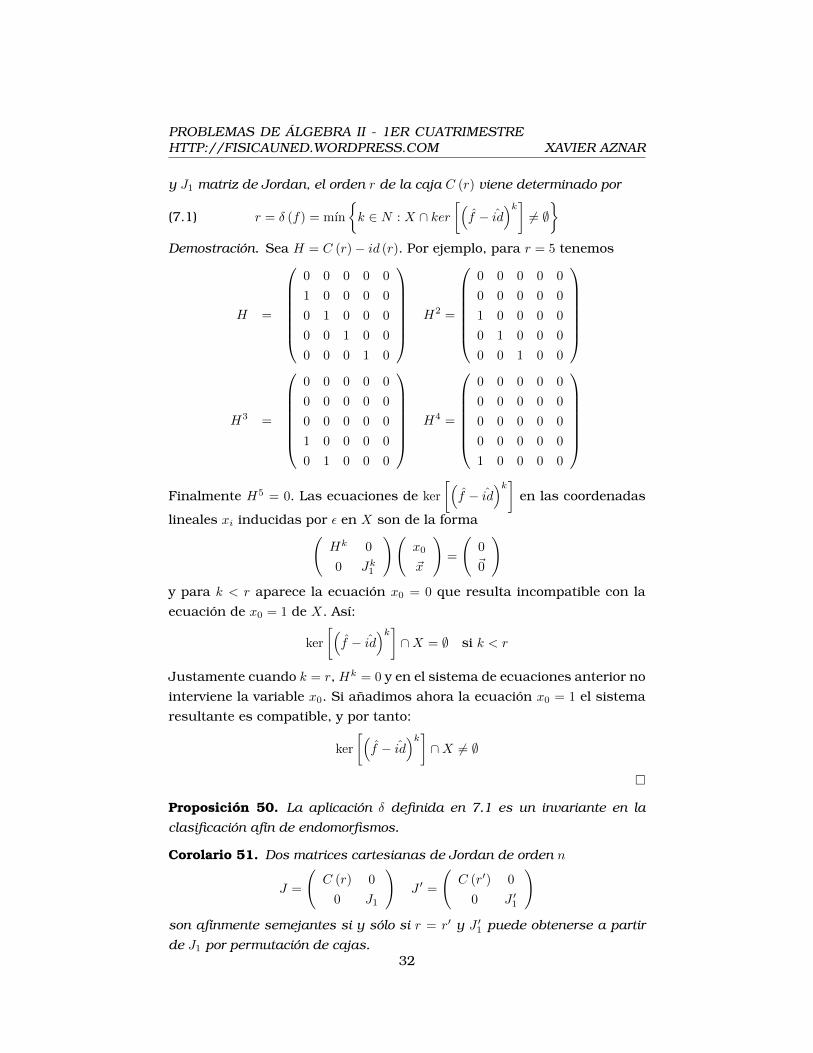
y J1 matriz de Jordan, el orden r de la caja C (r) viene determinado por
(7.1) r = δ (f) = mın
{k ∈ N : X ∩ ker
[(f − id
)k]6= ∅}
Demostración. Sea H = C (r)− id (r). Por ejemplo, para r = 5 tenemos
H =
0 0 0 0 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
H2 =
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
H3 =
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
0 1 0 0 0
H4 =
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
1 0 0 0 0
Finalmente H5 = 0. Las ecuaciones de ker
[(f − id
)k]en las coordenadas
lineales xi inducidas por ε en X son de la forma(Hk 0
0 Jk1
)(x0
~x
)=
(0
~0
)y para k < r aparece la ecuación x0 = 0 que resulta incompatible con la
ecuación de x0 = 1 de X. Así:
ker
[(f − id
)k]∩X = ∅ si k < r
Justamente cuando k = r, Hk = 0 y en el sistema de ecuaciones anterior no
interviene la variable x0. Si añadimos ahora la ecuación x0 = 1 el sistema
resultante es compatible, y por tanto:
ker
[(f − id
)k]∩X 6= ∅
�
Proposición 50. La aplicación δ definida en 7.1 es un invariante en laclasificación afín de endomorfismos.
Corolario 51. Dos matrices cartesianas de Jordan de orden n
J =
(C (r) 0
0 J1
)J ′ =
(C (r′) 0
0 J ′1
)son afínmente semejantes si y sólo si r = r′ y J ′1 puede obtenerse a partirde J1 por permutación de cajas.
32

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Observación 52. Procedimiento general para encontrar la matriz de una
simetría (o proyección) afín
1. Empezamos buscando la simetría (o proyección) vectorial ~σ (o ~π)
asociada con la simetría (o proyección) afín σ (o π)
a) Obtenemos los vectores⟨{
~bi
}⟩,⟨{
~di
}⟩que generan la base ~B
y la dirección ~D de la simetría ~σ (o proyección ~π)
b) Utilizamos las propiedades de la simetría (o proyección) para
obtener los coeficientes de la matriz Mε (~σ) (o Mε (~π)) planteando
las ecuaciones:
1) Para los vectores de la base de la simetría (o proyección):
Mε (~σ)(~bi
)=
(~bi
) a d g
b e h
c f i
bi,1
bi,2
bi,3
=
bi,1
bi,2
bi,3
i = 1, ..,dim ~B
2) Para los vectores de la dirección de:
a′ ) Simetría
Mε (~σ)(~di
)= −
(~di
) a d g
b e h
c f i
di,1
di,2
di,3
= −
di,1
di,2
di,3
i = 1, ..,dim ~D
b′ ) Proyección
Mε (~π)(~di
)=
(~0)
a d g
b e h
c f i
di,1
di,2
di,3
=
0
0
0
i = 1, ..,dim ~D
c) Resolviendo las dim ~B + dim ~D ecuaciones, obtenemos los 9 coe-
ficientes de la matriz Mε (~σ) (o Mε (~π)).
d) Tanto la simetría como la proyección dejan invariante el pun-
to de la base, de manera que podemos obtener los coeficientes
α, β, γ de la matriz de la simetria σ (o proyección π) afín
Mε (σ) =
1 0 0 0
α
β Mε (~σ)
γ
Mε (π) =
1 0 0 0
α
β Mε (~π)
γ
33

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Elegimos un punto de la base de la simetría σ (o proyección π )
afín.
p =
1
p1
p2
p3
∈ B1) Planteamos las ecuaciones
Mε (σ|π) p = p1 0 0 0
α
β Mε (~σ|~π)
γ
1
p1
p2
p3
=
1
p1
p2
p3
(donde Mε (σ|π) es la matriz de la simetría afín σ o de la
proyección afín π, según el caso).
2) Resolviendo las tres ecuaciones obtenemos los valores de
α, β, γ y determinamos completamente Mε (σ) (o Mε (π)).
7.1. Problemas tipo.
Ejercicio 53. Sea ε ={e0, ~e′1,
~e′2,~e′3
}un sistema de referencia cartesiano
del espacio afín real de dimensión 3 A3 (R). Sea M el subespacio afín de
ecuaciones respecto de ε
M := (x1 = 0, x2 = 0)
y N el subespacio vectorial de ecuación ~N := (x3 = 0).
1. Hallar la matriz de la simetría afín con base M y dirección ~N .
2. Sea τ~v la traslación de vector ~v =
1
1
0
. Hallar la forma de Jordan
Jh de la composición h1 = τ~v · σ.
3. Hallar ε′ tal que Mε′ (h1) = Jh1
4. Si h2 = σ · τ~v, estudiar si h1 y h2 son afínmente equivalentes.
Demostración. Empezamos buscando la simetría vectorial ~σ asociada a σ.
Buscamos el vector que generan la base ~M := (x1 = 0, x2 = 0)
~M :=
⟨ 0
0
1
⟩ = 〈~e3〉
34

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Buscamos los vectores que generan la dirección ~N := (x3 = 0)
~N :=
⟨ 1
0
0
,
0
1
0
⟩ = 〈~e1, ~e2〉
Sabemos que una simetría deja invariantes los vectores de la base e in-
vierte los de la dirección, por lo que
~σ (~e3) = ~e3
~σ (~e1) = −~e1
~σ (~e2) = −~e2
De manera que la matriz de Mε (~σ) es
Mε (~σ) =
−1 0 0
0 −1 0
0 0 1
El siguiente paso es obtener los coeficientes de Mε (σ)
Mε (σ) =
1 0 0 0
α −1 0 0
β 0 −1 0
γ 0 0 1
Buscamos un punto perteneciente a la base afín de la simetría, que queda-
rá invariante por ella. Observamos que el origen del sistema de referencia
e0 =
1
0
0
0
∈M , de manera que α = β = γ = 0
Mε (σ) =
1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 1
En el segundo apartado vamos a hallar la forma de Jordan Jh de la
composición h1 = τ~v · σ, donde ~v =
1
1
0
.
35
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
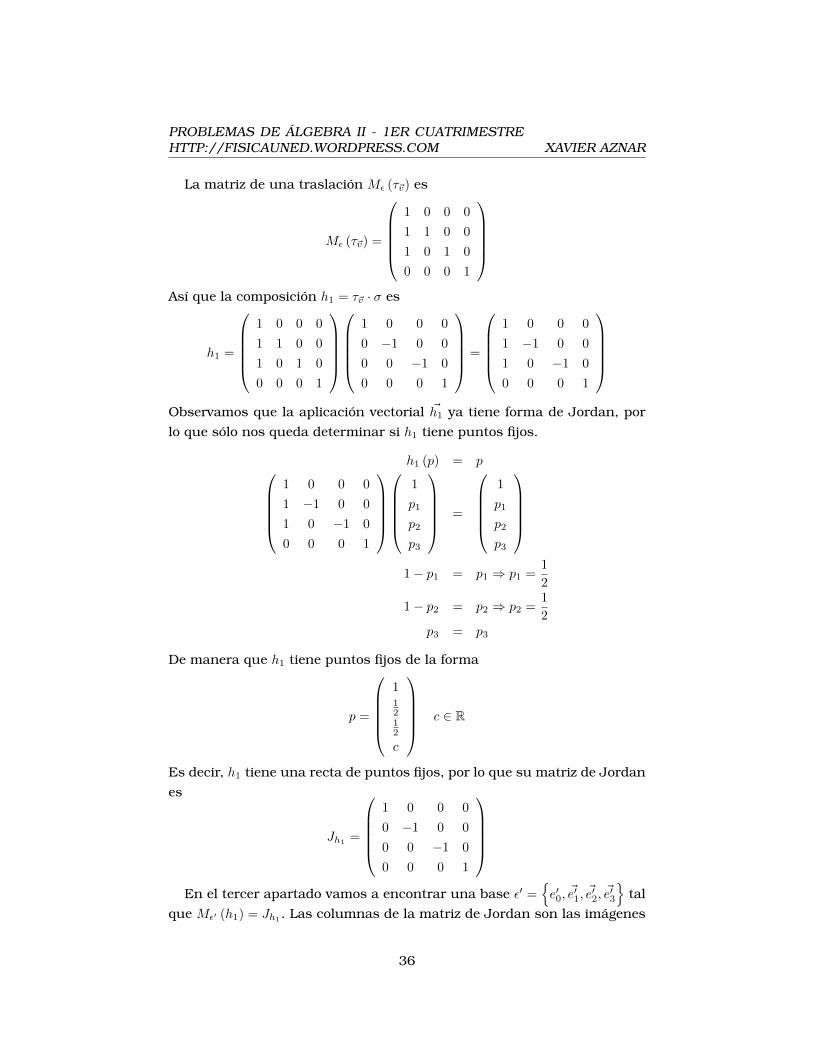
La matriz de una traslación Mε (τ~v) es
Mε (τ~v) =
1 0 0 0
1 1 0 0
1 0 1 0
0 0 0 1
Así que la composición h1 = τ~v · σ es
h1 =
1 0 0 0
1 1 0 0
1 0 1 0
0 0 0 1
1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 1
=
1 0 0 0
1 −1 0 0
1 0 −1 0
0 0 0 1
Observamos que la aplicación vectorial ~h1 ya tiene forma de Jordan, por
lo que sólo nos queda determinar si h1 tiene puntos fijos.
h1 (p) = p1 0 0 0
1 −1 0 0
1 0 −1 0
0 0 0 1
1
p1
p2
p3
=
1
p1
p2
p3
1− p1 = p1 ⇒ p1 =
1
2
1− p2 = p2 ⇒ p2 =1
2p3 = p3
De manera que h1 tiene puntos fijos de la forma
p =
11212
c
c ∈ R
Es decir, h1 tiene una recta de puntos fijos, por lo que su matriz de Jordan
es
Jh1=
1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 1
En el tercer apartado vamos a encontrar una base ε′ =
{e′0,
~e′1,~e′2,
~e′3
}tal
que Mε′ (h1) = Jh1. Las columnas de la matriz de Jordan son las imágenes
36

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
de los vectores de la base ε′, de manera que
Jh1(e′0) = e′0
Es decir, e′0 es un punto fijo. Hemos visto que los puntos fijos son de la
forma
p =
11212
c
c ∈ R
por lo que elegimos c = 0
e′0 =
11212
0
Para el resto de vectores del sistema de referencia
Jh1(−→e1,2
′) = −−→e1,2′ ⇒ −→e1,2
′ ∈ ker(~Jh1
+−→id)⇒ x3 = 0
De manera que para −→e1,2′ podemos elegir −→e1,2. Finalmente, Jh1
(−→e3′) = −→e3
′ ⇒−→e3′ ∈ ker
(−→Jh1 −
−→id)⇒ x1 = x2 = 0. Es decir, que podemos elegir −→e3
′ = −→e3.
Finalmente,
ε′ =
11212
0
,−→e1 ,−→e2 ,−→e3
En el último apartado h2 = σ · τ~v. Vamos a demostrar que h1 y h2 son
afínmente equivalentes. Para que dos aplicaciones sean afínmente equiva-
lentes, debe existir g tal que h1 = g · h2 · g−1. En este caso podemos utilizar
g = σ, como vemos
(7.2) h1 = σ · h2 · σ−1 = σ · (σ · τ~v) · σ−1 = σ2 · τ~v · σ−1
Pero ahora, por las propiedades de la simetría
σ2 = id⇒ σ = σ−1
de manera que 7.2 queda
h1 = τ~v · σ
que es precisamente la definición de h1. También podríamos haber utili-
zado g = τ~v
h1 = τ~v · h2 · τ−1~v = τ~v · (σ · τ~v) · τ−1
~v = τ~v · σ ·(τ~v · τ−1
~v
)= τ~v · σ
37

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Lo que demuestra de nuevo que h1 y h2 son afínmente equivalentes. �
Ejercicio 54. Sea ε un sistema de referencia cartesiano de un espacio
afín real de dimensión 3 A3 (R). Sean R y S los subespacios afines de
ecuaciones respecto a ε
R := (x2 = 2, x3 = 0)
S := (x1 + x3 = 1, x2 = 2)
1. Hallar la matriz de la simetría afín σ con base R + S y dirección
〈−→e1 +−→e2 +−→e3〉.
2. Sea τa la traslación del vector
1
1 + a
1− a
, donde a ∈ R. Determinar
la matriz canónica de Jordan de τa · σ en función de a.
3. Si a = 0, hallar un sistema de referencia cartesiano ε′ tal que la
matriz de Jordan de τ0 sea Mε′ (τ0 · σ).
Demostración. a)
Empezamos estudiando la posición relativa de las dos rectas R y S.
Elegimos un punto de cada recta:
pR =
1
x1
2
0
pS =
1
x1
2
1− x1
De manera que vemos que existe un punto común p =
1
1
2
0
∈ R ∩ S. Es
decir, las rectas R y S se cortan en un punto. De manera que R + S es
un plano afín que contiene las dos rectas R y S. En este caso, podemos
describir el plano R+ S como
R+ S = p+ ~R+ ~S
~R =
⟨ 1
0
0
⟩ ~S =
⟨ 1
0
−1
⟩38

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Por lo que
R+ S =
1
1
2
0
+ λ
1
0
0
+ µ
1
0
−1
Los puntos q ∈ R+ S serán de la forma
q =
1
x1
x2
x3
=
1
1 + λ+ µ
2
−µ
⇒ x2 = 2
R+ S := (x2 = 2)
El primer paso para obtener la matriz de simetría afín σ será obtener la
matriz de la simetría vectorial ~σ asociada, con base ~R + ~S y dirección ~D =
〈−→e1 ,−→e2 ,−→e3〉
~R+ ~S := (x2 = 0)
De las propiedades de la simetría sabemos que σ (~eb) = ~eb (deja invariantes
los vectores de la base) . Como −→e1 ,−→e3 ∈ ~R+ ~S de ecuciones (x2 = 0),
σ (−→e1) = −→e1
σ (−→e3) = −→e3
En cuanto a los vectores de la dirección
σ (−→e1 +−→e2 +−→e3) = −−→e1 −−→e2 −−→e3
De manera que tenemos
σ (−→e1 +−→e2 +−→e3) = σ (−→e1) + σ (−→e2) + σ (−→e3) = −→e1 +−→e3 + σ (−→e2)⇒
⇒ σ (−→e2) = −2−→e1 −−→e2 − 2−→e3
Con lo que la matriz de la simetría vectorial
~σ =
1 −2 0
0 −1 0
0 −2 1
El siguiente paso implica seleccionar un punto de la base del espacio afín
base de la simetría σ (que quedará invariante) para poder determinar los
39
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
coeficientes α, β, γ
Mε (σ) =
1 0 0 0
α 1 −2 0
β 0 −1 0
γ 0 −2 1
Elegimos un punto cualquiera de R+ S,
p =
1
1
2
0
1 0 0 0
α 1 −2 0
β 0 −1 0
γ 0 −2 1
1
1
2
0
=
1
1
2
0
=
1
α− 3
β − 2
γ − 4
Con lo que obtenemos
α = 4, β = 4, γ = 4
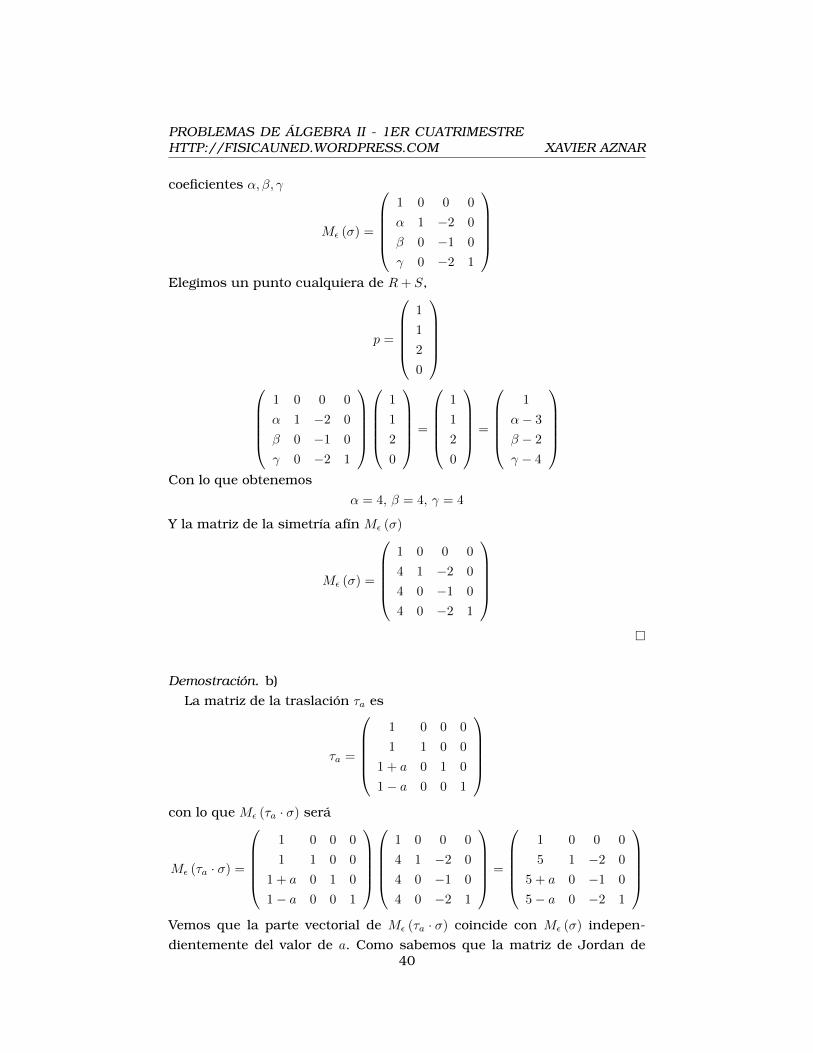
Y la matriz de la simetría afín Mε (σ)
Mε (σ) =
1 0 0 0
4 1 −2 0
4 0 −1 0
4 0 −2 1
�
Demostración. b)
La matriz de la traslación τa es
τa =
1 0 0 0
1 1 0 0
1 + a 0 1 0
1− a 0 0 1
con lo que Mε (τa · σ) será
Mε (τa · σ) =
1 0 0 0
1 1 0 0
1 + a 0 1 0
1− a 0 0 1
1 0 0 0
4 1 −2 0
4 0 −1 0
4 0 −2 1
=
1 0 0 0
5 1 −2 0
5 + a 0 −1 0
5− a 0 −2 1
Vemos que la parte vectorial de Mε (τa · σ) coincide con Mε (σ) indepen-
dientemente del valor de a. Como sabemos que la matriz de Jordan de40
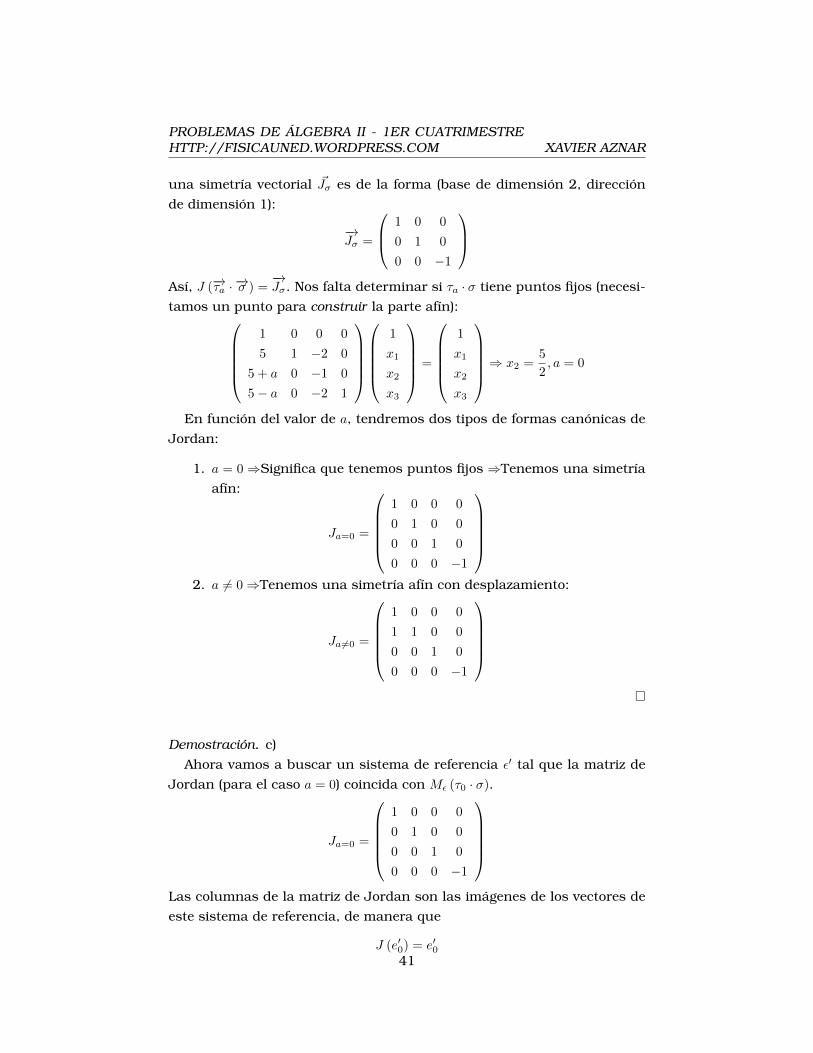
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
una simetría vectorial ~Jσ es de la forma (base de dimensión 2, dirección
de dimensión 1):
−→Jσ =
1 0 0
0 1 0
0 0 −1
Así, J (−→τa · −→σ ) =
−→Jσ. Nos falta determinar si τa · σ tiene puntos fijos (necesi-
tamos un punto para construir la parte afín):1 0 0 0
5 1 −2 0
5 + a 0 −1 0
5− a 0 −2 1
1
x1
x2
x3
=
1
x1
x2
x3
⇒ x2 =5
2, a = 0
En función del valor de a, tendremos dos tipos de formas canónicas de
Jordan:
1. a = 0⇒Significa que tenemos puntos fijos ⇒Tenemos una simetría
afín:
Ja=0 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 −1
2. a 6= 0⇒Tenemos una simetría afín con desplazamiento:
Ja 6=0 =
1 0 0 0
1 1 0 0
0 0 1 0
0 0 0 −1
�
Demostración. c)
Ahora vamos a buscar un sistema de referencia ε′ tal que la matriz de
Jordan (para el caso a = 0) coincida con Mε (τ0 · σ).
Ja=0 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 −1
Las columnas de la matriz de Jordan son las imágenes de los vectores de
este sistema de referencia, de manera que
J (e′0) = e′041

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Elegimos como e′0 un punto fijo, cuya forma hemos determinado en el
apartado anterior
x2 =5
2, (a = 0)
e′0 =
1
052
0
Para los vectores
J(~e′1,2
)= −→e1,2
′ ⇒ −→e1,2′ ∈ ker
(−→τ0σ − ~id)
= ker(−→σ − ~id
)J (−→e3) = −−→e3 ⇒ −→e3
′ ∈ ker(−→σ +
−→id)
ker(−→σ − ~id
)⇒ x2 = 0⇒ −→e1
′ = −→e1 =
1
0
0
, −→e2′ = −→e3 =
0
0
1
ker(−→σ +
−→id)⇒ x1 = x2 = x3 ⇒ −→e3
′ =
1
1
1
Finalmente, el sistema de referencia ε′ en el que Mε′ (τ0σ) = J es
ε′ =
1
052
0
,
1
0
0
,
0
0
1
,
1
1
1
Podríamos comprobar que funciona mediante:
P =
1 0 0 0
0 1 0 152 0 0 1
0 0 0 1
P−1Mε (τ0σ)P = J
�
Ejercicio 55. Sea ε un sistema de referencia cartesiano de un espacio
afín real de dimensión 3 A3 (R). Sean M y N los subespacios afines de
ecuaciones respecto a ε
M := (x3 = 0)
N := (2x1 + x3 = 2, x2 = 0)
42
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
1. Hallar la matriz respecto a ε de la simetría afín σ con base N y
dirección ~M .
2. Hallar la matriz respecto a ε de la proyección afín π con base M y
dirección ~N .
Demostración. a)
Empezamos calculando la matriz de la simetría vectorial ~σ asociada a σ
con base ~N := (2x1 + x3 = 0, x2 = 0) y dirección ~M := (x3 = 0).
~N :=
⟨ 1
0
−2
⟩ ~M =
⟨ 1
0
0
,
0
1
0
⟩
Sea ~σ =
a d g
b e h
c f i
σ
1
0
−2
=
1
0
−2
a d g
b e h
c f i
1
0
−2
=
1
0
−2
=
a− 2g
b− 2h
c− 2i
a = 1− 2g
b = 2h
c = 2i− 2
σ
1
0
0
=
−1
0
0
1− 2g d g
2h e h
2i− 2 f i
1
0
−2
=
1
0
−2
=
1 + 2g
2h
2i− 2
g = 1
h = 0
i = 143

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
σ
0
1
0
=
0
−1
0
−1 d −1
0 e 0
0 f 1
0
1
0
=
0
−1
0
=
d
e
f
d = 0
e = −1
f = 0
De manera que ~σ
~σ =
−1 0 −1
0 −1 0
0 0 1
Ahora utilizamos un punto de la base de σ (que quedará invariante por
la acción de σ) para completar la matriz Mε (σ).
N 3 p =
1
1
0
0
1 0 0 0
α −1 0 −1
β 0 −1 0
γ 0 0 1
1
1
0
0
=
1
1
0
0
=
1
α− 1
β
γ
De manera que
α = 2 β = 0 γ = 0
Y finalmente
Mε (σ) =
1 0 0 0
2 −1 0 −1
0 0 −1 0
0 0 0 1
�
Demostración. b)
Para encontrar la matriz de la proyección afín π con base M y direc-
ción ~N procederemos de manera análoga al apartado anterior. Empezamos
buscando las proyección vectorial −→π asociada a π.44
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
La proyección deja invariante los vectores de la base, por lo que pode-
mos escribir:
−→π
1
0
0
=
1
0
0
a d g
b e h
c f i
1
0
0
=
1
0
0
=
a
b
c
⇒ a = 1, b = 0, c = 0
−→π
0
1
0
=
0
1
0
0 d g
1 e h
0 f i
0
1
0
=
0
1
0
=
a
b
c
⇒ d = 0, e = 1, f = 0
La proyección envía los vectores de la dirección a ~0
−→π
1
0
−2
=
0
0
0
0 0 g
1 1 h
0 0 i
1
0
−2
=
0
0
0
=
1− 2g
−2h
−2i
⇒ g =1
2, h = 0, i = 0
De manera que Mε (~π) es
Mε (~π) =
0 0 12
1 1 0
0 0 0
Para obtener la matriz de la proyección afín π, elegimos un punto de la
base M := (x3 = 0). Por ejemplo, el origen,
p =
1
0
0
0
∈M
45
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
De manera que
Mε (π) =
1 0 0 0
0 0 0 12
0 1 1 0
0 0 0 0
�
Ejercicio 56. Sea ε un sistema de referencia cartesiano de un espacio afín
real de dimensión 3 A3 (R). Sea P el subespacio afíne de ecuación respecto
a ε
P := (x1 + x3 = 1)
Hallar la proyección afín π con base P y dirección
~D := (x1 = 0, x2 + 2x3 = 0)
Demostración. Empezamos buscando la proyección vectorial ~π asociada a
π. Buscamos los vectores que generan la base P (y que quedarán invarian-
tes bajo la acción de ~π):
~P : = (x1 + x3 = 0)→ x3 = −x1
~P :=
⟨ 1
0
−1
,
0
1
0
⟩
Buscamos el vector que genera la dirección ~D =
⟨ 0
2
−1
⟩Utilizandos las propiedades de la proyección, escribimos: a d g
b e h
c f i
1
0
−1
=
1
0
−1
=
a− gb− hc− i
a d a− 1
b e b
c f c+ 1
0
1
0
=
0
1
0
=
d
e
f
⇒ d = 0, e = 1, f = 0
Finalmente: a 0 a− 1
b 1 b
c 0 c+ 1
0
2
−1
=
0
0
0
=
−a+ 1
2− b−c− 1
⇒ a = 1, b = 2, c = −1
46
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
De manera que Mε (~π)
Mε (~π) =
1 0 0
2 1 2
−1 0 0
Ahora elegimos un punto de la base P para completar la matriz de la
proyección afín π. Elegimos
p =
1
1
0
0
∈ PDe manera que
1 0 0 0
α 1 0 0
β 2 1 2
γ −1 0 0
1
1
0
0
=
1
1
0
0
=
1
α+ 1
β + 2
γ − 1
⇒ α = 0, β = −2, γ = 1
Con lo que, finalmente
Mε (π) =
1 0 0 0
0 1 0 0
−2 2 1 2
−1 −1 0 0
�
8. HOMOTECIAS AFINES Y DILATACIONES
Definición 57. En un espacio afín X, una homotecia h = h (c, λ) afín
de centro c y razón λ, con λ 6= 0, 1, actúa dejando únicamente el centro
fijo y manteniendo invariantes las direcciones, produciendo, de manera
uniforme desde el centro, una extensión (si |λ| > 1) o una contracción (si
|λ| < 1) en función de la razón λ (ver figura 8.1).
Formalmente la acción de h (c, λ) sobre cada punto x del espacio afín X
se expresa por
h (c, λ) (x) = c+ λ (−→cx) = c+ λ (x− c)
por lo que h (c) = c es el único punto fijo de la homotecia h y la transfor-
mación lineal asociada es ~h = λ−→id.
Definición 58. Matriz asociada a una homotecia h.47

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
FIGURA 8.1. Homotecia h (c, λ) de centro c y razón λ > 1.
La matriz asociada una homotecia Mε (h) es de la forma:
Mε (h) =
1 0 0 0
c1 λ 0 0
c2 0 λ 0
c3 0 0 λ
Definición 59. Matriz de Jordan de una homotecia h
La matriz de Jordan Jh de una homotecia es de la forma
Jh =
(1 0
0 λId
)pues la homotecia siempre tiene un punto fijo, el centro de la homotecia y
la transformación lineal asociada tiene forma de matriz diagonal λId.
El conjunto formado por las homotecias y las traslaciones de X se de-
nomina grupo de las dilataciones de X.
Definición 60. Matriz de Jordan de una dilatación d
La matriz de Jordan Jd de una dilatación d, si tiene un punto fijo (y
λ 6= 1) es
Jd =
1 0 0
0 λ 0 0
0 0 λ 0
0 0 0 λ
48

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Proposición 61. La composición de una homotecia h (c, λ) y una traslaciónτ~v también es una homotecia (ver ejercicio 65)
h1 = h (c, λ) · τ~v ⇒ λ1 = λ c1 = c− λ
λ− 1~v
h2 = τ~v · h (c, λ)⇒ λ2 = λ c2 = c− ~v
λ− 1
Para demostrar que h es homotecia afín debemos verificar que:
1. ~h = λ~id
2. Existe un único punto c ∈ X tal que h (c) = c
Proposición 62. Un endomorfismo afín d es una dilatación si y sólo sitransforma una recta en otra paralela (ver ejercicio 68)
8.1. Problemas tipo.
Ejercicio 63. Sea A3 (R) el espacio afín real de dimensión 3 y ε un sistema
de referencia cartesiano. Calcula la matriz respecto a ε de la homotecia h
con centro c=
1
2
0
1
y tal que
h
1
1
1
1
=
1
−1
3
1
Determina la razón λ.
Demostración. Por las propiedades de la homotecia sabemos que su matriz
es de la forma
Mε (h) =
1 0 0 0
α λ 0 0
β 0 λ 0
γ 0 0 λ
49
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
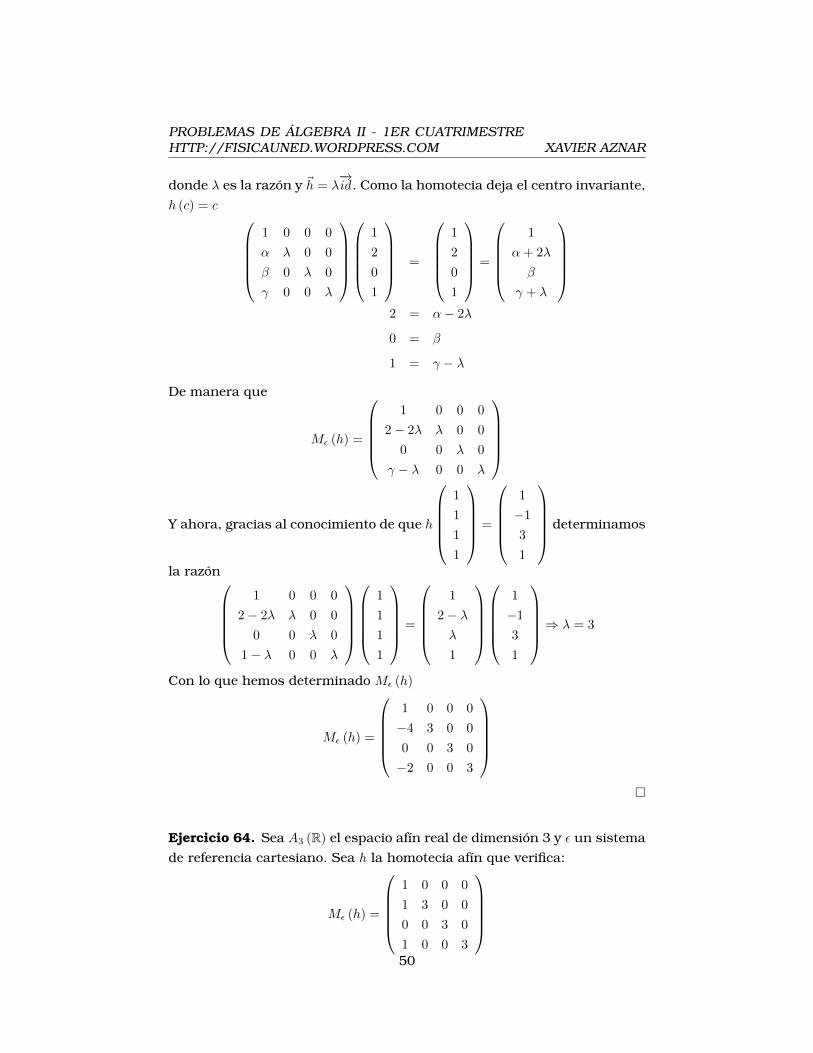
donde λ es la razón y ~h = λ−→id. Como la homotecia deja el centro invariante,
h (c) = c 1 0 0 0
α λ 0 0
β 0 λ 0
γ 0 0 λ
1
2
0
1
=
1
2
0
1
=
1
α+ 2λ
β
γ + λ
2 = α− 2λ
0 = β
1 = γ − λ
De manera que
Mε (h) =
1 0 0 0
2− 2λ λ 0 0
0 0 λ 0
γ − λ 0 0 λ
Y ahora, gracias al conocimiento de que h
1
1
1
1
=
1
−1
3
1
determinamos
la razón1 0 0 0
2− 2λ λ 0 0
0 0 λ 0
1− λ 0 0 λ
1
1
1
1
=
1
2− λλ
1
1
−1
3
1
⇒ λ = 3
Con lo que hemos determinado Mε (h)
Mε (h) =
1 0 0 0
−4 3 0 0
0 0 3 0
−2 0 0 3
�
Ejercicio 64. Sea A3 (R) el espacio afín real de dimensión 3 y ε un sistema
de referencia cartesiano. Sea h la homotecia afín que verifica:
Mε (h) =
1 0 0 0
1 3 0 0
0 0 3 0
1 0 0 3
50

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Hallar la matriz de Jordan Jh para h y un sistema de referencia ε′ tal que
Mε′ (h) = Jh.
Demostración. La matriz de Jordan de una homotecia Jh es de la forma
Jh =
(1 0
0 λId
)ya que la homotecia siempre tiene un punto fijo, el centro de la homotecia.
En nuestro caso, la forma de la matriz de Jordan Jh es
Jh =
1 0 0 0
0 3 0 0
0 0 3 0
0 0 0 3
Ahora vamos a buscar un sistema de referencia cartesiano ε′ = {e′0, ~ei, i = 1, 2, 3}
tal que Mε′ = Jh Empezamos buscando el nuevo origen del sistema de re-
ferencia ε′
h (e′0) = e′01 0 0 0
1 3 0 0
0 0 3 0
1 0 0 3
1
x1
x2
x3
=
1
1 + 3x1
3x2
1 + 3x1
=
1
x1
x2
x3
⇒ x1 = −1
2, x2 = 0, x3 = −1
2
Como ~h = λ−→Id podemos utilizar los vectores −→e1
′ = −→e1 ,−→e2′ = −→e2 y −→e3
′ = −→e3 de
manera que
ε′ =
1
− 12
0
− 12
,
1
0
0
,
0
1
0
,
0
0
1
�
Ejercicio 65. En el espacio afín X sea h un homotecia afín de centro c y
razón λ 6= 0, 1. Sea τ~v la traslación de vector ~v 6= 0.
1. Probar que las composiciones
h1 = h · τ~v
h2 = τ~v · h
son homotecias afines de razón λ.51

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
2. Si c1 y c2 son los centros de h1 y h2 comprobar que satisfacen
c1 = c− λ~v
λ− 1
c2 = c− ~v
λ− 1
Concluir que si ~v 6= ~0 se cumple que h1 6= h2.
Demostración. Para demostrar que h es una homotecia afín debemos com-
probar que para la aplicación vectorial asociada ~h (x) =(λ−→id)
(x) existe un
único c ∈ X tal que h (c) = c.
Por definición de homotecia
h (x) = h (c, λ) (x) = c+ λ (−→cx) = c+ λ (x− c)
Luego
h1 (x) = (h · τ~v) (x) = h (x+ ~v) = c+ λ (x+ ~v − c)
Ahora tomamos un y ∈ X, y 6= x
~h1 (−→xy) = h1 (y)− h1 (x) = c+ λ (y + ~v − c)− (c+ λ (x+ ~v − c)) =
= λ (y − x) = λ (−→xy)⇒ ~h1 = λ−→id
Medianteh1 (x) = x buscamos el punto invariante de la homotecia h1 (su
centro).
x = h1 (x) = (h · τ~v) (x) = h (x+ ~v) = c+ λ (x+ ~v − c) = c+ λx+ λ~v − λc
Aislamos x para obtener el punto invariante de la homotecia h1
x− λx = c+ λ~v − λc
x (1− λ) = (1− λ) c+ λ~v
x = c− λ~v
λ− 1(λ 6= 1)
Por tanto, hemos comprobado que h1 = h · τ~v es una homotecia de razón λ
y centro c1 = c− λ~vλ−1 .
Seguimos los mismos pasos para comprobar el caso de la homotecia
h2 = τ~v · hPrimero probamos que ~h2 = λ
−→id
h2 (x) = (τ~v · h) (x) = τ~v (c+ λ (x− c)) = c+ λ (x− c) + ~v52

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Elegimos un y ∈ X, y 6= x
h2 (−→xy) = h2 (y − x) = h2 (y)− h2 (x) =
= c+ λ (y − c) + ~v − (c+ λ (x− c) + ~v) =
= λ (y − x) = λ−→xy ⇒ ~h2 = λ−→id
Ahora, vamos a buscar su centro, es decir, que existe un único punto
x ∈ X tal que h2 (x) = x.
x = h2 (x) = (τ~v · h) (x) = c+ λ (x− c) + ~v
x− λx = c (1− λ) + ~v
x = c− ~v
λ− 1(λ 6= 1)
Es decir, que h2 es una homotecia de razón λ y centro c2 = c− ~vλ−1 . �
Ejercicio 66. Sea ε = {0; ~e1, ~e2, ~e3} un sistema de referencia cartesiano del
espacio afín real de dimensión 3 A3 (R)
1. Calcular la matriz de dilatación d con centro c =
1
1
0
1
y razón
λ = 2 tal que d
1
1
0
1
=
1
1
2
0
.
2. Expresar d como composición de una homotecia afín con centro en
el origen O y una traslación.
Demostración. 1)
La dilatación es de razón λ = 2 de manera que Mε (d) es
Mε (d) =
1 0 0 0
α 2 0 0
β 0 2 0
γ 0 0 2
53
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
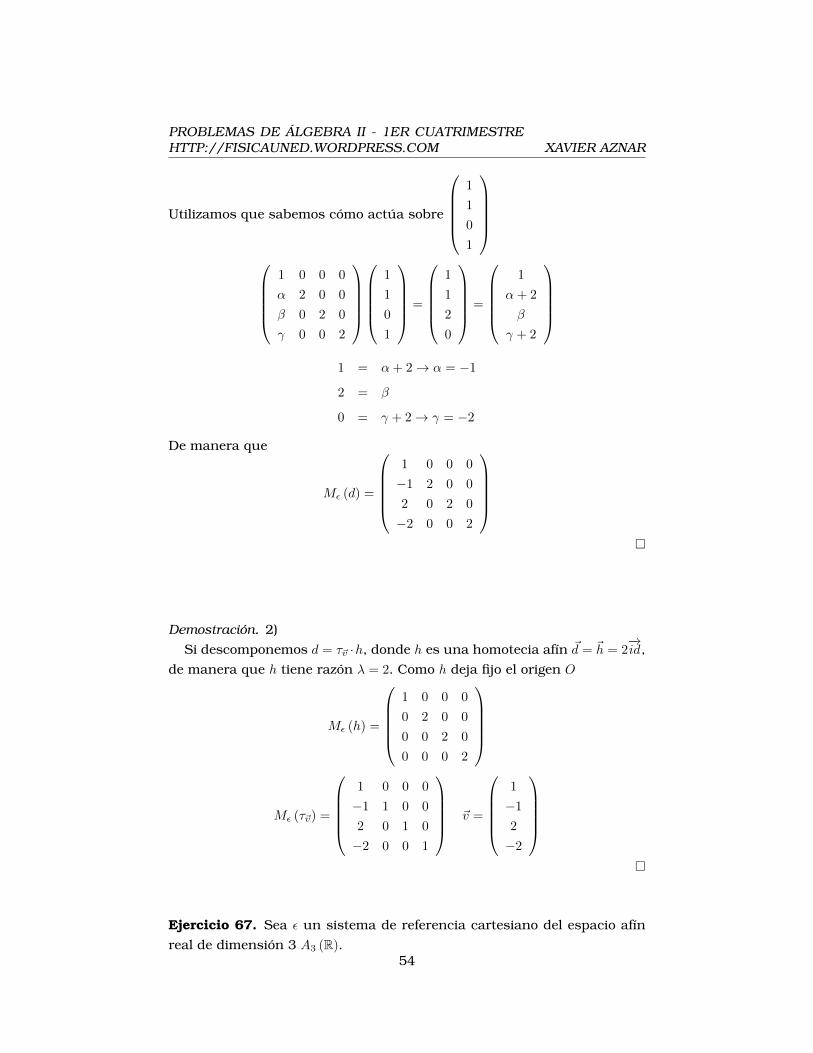
Utilizamos que sabemos cómo actúa sobre
1
1
0
1
1 0 0 0
α 2 0 0
β 0 2 0
γ 0 0 2
1
1
0
1
=
1
1
2
0
=
1
α+ 2
β
γ + 2
1 = α+ 2→ α = −1
2 = β
0 = γ + 2→ γ = −2
De manera que
Mε (d) =
1 0 0 0
−1 2 0 0
2 0 2 0
−2 0 0 2
�
Demostración. 2)
Si descomponemos d = τ~v ·h, donde h es una homotecia afín ~d = ~h = 2−→id,
de manera que h tiene razón λ = 2. Como h deja fijo el origen O
Mε (h) =
1 0 0 0
0 2 0 0
0 0 2 0
0 0 0 2
Mε (τ~v) =
1 0 0 0
−1 1 0 0
2 0 1 0
−2 0 0 1
~v =
1
−1
2
−2
�
Ejercicio 67. Sea ε un sistema de referencia cartesiano del espacio afín
real de dimensión 3 A3 (R).54

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
1. Hallar la matriz de la dilatación d de A3 (R) que transforma P1 en
Q1 y P2 en Q2
P1 =
1
1
0
0
Q1 =
1
0
2
1
P2 =
1
1
2
0
Q2 =
1
0
1
1
2. Hallar la transformación canónica de Jordan de d.
Demostración. 1)
Si d transforma P1 en Q1 y P2 en Q2 usamos esta información para
determinar λ, α, β y γ.
Mε (d) =
1 0 0 0
α λ 0 0
β 0 λ 0
γ 0 0 λ
1 0 0 0
α λ 0 0
β 0 λ 0
γ 0 0 λ
1
1
0
0
=
1
0
2
1
=
1
α+ λ
β
γ
α = −λ
β = 2
γ = 11 0 0 0
−λ λ 0 0
2 0 λ 0
1 0 0 λ
1
1
2
0
=
1
0
1
1
=
1
λ− λ2 + 2λ
1
⇒ λ = −1
2
Así,
Mε (d) =
1 0 0 012 − 1
2 0 0
2 0 − 12 0
1 0 0 − 12
�
55

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Demostración. 2)
Como la dilatación d tiene un punto fijo (y λ 6= 1), la matriz de Jordan Jd
es
Jd =
1 0 0 0
0 − 12 0 0
0 0 − 12 0
0 0 0 − 12
�
Ejercicio 68. Demostrar que un enfomorfismo afín es una dilatación si y
sólo si transforma cada recta en otra paralela.
Demostración. Para demostrar esta afirmación debemos demostrar:
1. Si d es dilatación ⇒ d transforma cada recta en una recta paralela.
2. Si g transforma cada recta en otra paralela ⇒ g es una dilatación.
Si d es una dilatación, entonces transforma una recta en otra paralela.
Por definición, ~d = λ−→id ⇒ ∀~v, ~d (~v) = λ~v, es decir, la dirección de la recta 〈~v〉
queda invariante ⇒ d transforma una recta en otra recta paralela.
En cuanto a la segunda implicación, suponemos que g (R) es paralela a
R⇒ ~g (~v) = λ~v~v para un autovalor λ~v asociado a ~v. Tenemos que demostrar
que λ~v es independiente de ~v. Vamos a mirar qué casos pueden darse:
1. Si ~w = α~v (es múltiplo de ~v)
~g (~w) = λ~w ~w
~g (α~v) = α~g (~v) = αλ~v~v = λ~v (α~v) = λ~v ~w
De manera que
λ~w = λ~v = λ
siempre que ~v y ~w sean linealmente dependientes.
2. Si ~v y ~w son linealmente independientes:
~g (~v + ~w) = λ~v+~w (~v + ~w) = λ~v+~w~v + λ~v+~w ~w
~g (~v) + ~g (~w) = λ~v~v + λ~w ~w
Como ~v y ~w son linealmente independientes, de la igualdad se de-
duce que
λ~v+~w = λ~v = λ~w = λ
Por lo que hemos demostrado que λ no depende de ~v, ~g = λ−→id y por tanto,
g es una dilatación. �
56
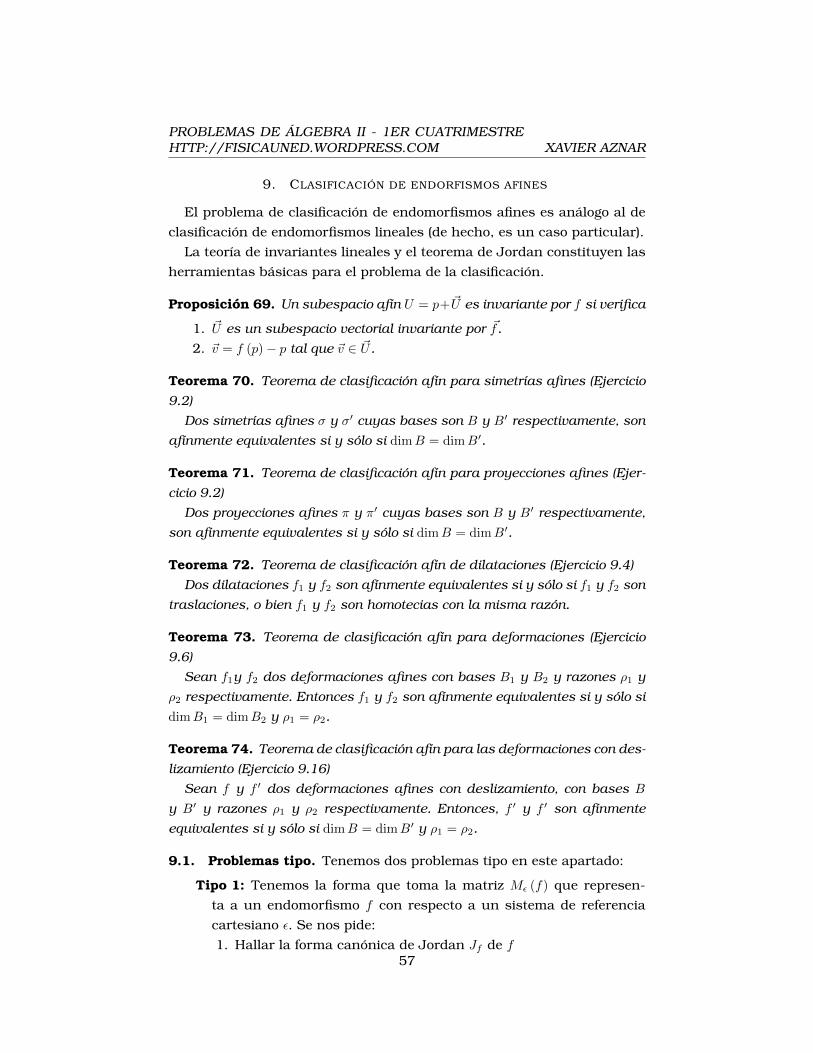
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
9. CLASIFICACIÓN DE ENDORFISMOS AFINES
El problema de clasificación de endomorfismos afines es análogo al de
clasificación de endomorfismos lineales (de hecho, es un caso particular).
La teoría de invariantes lineales y el teorema de Jordan constituyen las
herramientas básicas para el problema de la clasificación.
Proposición 69. Un subespacio afín U = p+ ~U es invariante por f si verifica
1. ~U es un subespacio vectorial invariante por ~f .2. ~v = f (p)− p tal que ~v ∈ ~U .
Teorema 70. Teorema de clasificación afín para simetrías afines (Ejercicio9.2)
Dos simetrías afines σ y σ′ cuyas bases son B y B′ respectivamente, sonafínmente equivalentes si y sólo si dimB = dimB′.
Teorema 71. Teorema de clasificación afín para proyecciones afines (Ejer-cicio 9.2)
Dos proyecciones afines π y π′ cuyas bases son B y B′ respectivamente,son afínmente equivalentes si y sólo si dimB = dimB′.
Teorema 72. Teorema de clasificación afín de dilataciones (Ejercicio 9.4)Dos dilataciones f1 y f2 son afínmente equivalentes si y sólo si f1 y f2 son
traslaciones, o bien f1 y f2 son homotecias con la misma razón.
Teorema 73. Teorema de clasificación afín para deformaciones (Ejercicio9.6)
Sean f1y f2 dos deformaciones afines con bases B1 y B2 y razones ρ1 yρ2 respectivamente. Entonces f1 y f2 son afínmente equivalentes si y sólo sidimB1 = dimB2 y ρ1 = ρ2.
Teorema 74. Teorema de clasificación afín para las deformaciones con des-lizamiento (Ejercicio 9.16)
Sean f y f ′ dos deformaciones afines con deslizamiento, con bases B
y B′ y razones ρ1 y ρ2 respectivamente. Entonces, f ′ y f ′ son afínmenteequivalentes si y sólo si dimB = dimB′ y ρ1 = ρ2.
9.1. Problemas tipo. Tenemos dos problemas tipo en este apartado:
Tipo 1: Tenemos la forma que toma la matriz Mε (f) que represen-
ta a un endomorfismo f con respecto a un sistema de referencia
cartesiano ε. Se nos pide:
1. Hallar la forma canónica de Jordan Jf de f57

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
a) El primer paso es averiguar si f tiene puntos fijos. Para ello
nos preguntamos ¿f (p) = p?, donde p ∈ A3 (R) es un punto
cualquiera de la forma p = (1, a, b, c).
1) Si f tiene puntos fijos, entonces Jf es Jf =
1 0 · · ·0 J~f · · ·...
.... . .
.
2) Si f no tiene puntos fijos, entonces Jf es Jf =
1 0 · · ·1 J~f · · ·...
.... . .
b) El resto de la matriz de Jordan Jf de f es la forma canónica
de Jordan para la aplicación lineal asociada−→f al endomor-
fismo afín f . Por tanto hallamos la forma canónica de J~f
calculando el polinomio característico χ~f (λ) = det∣∣∣~f − λ−→id∣∣∣,
etc.
2. Hallar un sistema de referencia ε′ en el que Mε′ (f) = Jf
a) Las columnas de la forma de Jordan Jf son la imagen de
los vectores del sistema de referencia ε′ por f de manera
que podemos escribir, para cada columna:
Jf =
1 0 0 0
ε λ1 0 0
0 ε1 λ2 0
0 0 ε2 λ3
f (O′) = O′ + ε~e′1 (ε = {0, 1})
f(~e′1
)= λ1
~e′1 + ε1 ~e′2 (ε1 = {0, 1})
...
3. Hallar las ecuaciones respecto a ε′ de los subespacios afines
invariantes por f .
Usaremos la proposición 69 para encontrarlos.
a) Primero buscamos los subespacios invariantes vectoriales
por ~f .
b) Tomamos un punto A3 3 p = (1, a, b, c) cualquiera y cons-
truimos ~v = f (p)− p.c) Comprobamos si ~v ∈
{~X}
, donde{~X}
es el conjunto de los
subespacios vectoriales invariantes por ~f . Si ~v ∈ ~X, enton-
ces X = p| ~X + ~X es un espacio invariante por f .
58

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Tipo 2: Dado un polinomio característico χf (λ) y las condiciones que
verifica el endomorfismo afín f , hallar la forma canónica de Jor-
dan Jf de f . Las condiciones que verifica f son del tipo: f no tiene
puntos fijos, f no tiene rectas invariante y deja al menos un plano
invariante, etc.
Ejercicio 75. (Ejercicio Tipo 1)
En el espacio afín tridimensional A (R) se considera el sistema de re-
ferncia cartesiano ε = {O; ~e1, ~e2, ~e3}. Sea f un endomorfismo cuya matriz
respecto a ε viene dada por:
Mε (f) =
1 0 0 0
0 1 1 1
1 0 1 0
0 0 0 1
1. Calcular la matriz de Jordan Jf de f .
2. Hallar el sistema de referencia ε′ de A3 tal que Mε′ (f) = Jf .
3. Determinar las ecuaciones respecto a ε′ de los subespacio afines
invariantes por f .
Demostración. 1)
Para buscar la matriz de Jordan Jf empezamos buscando puntos fijos.
f (p) = p ?1 0 0 0
0 1 1 1
1 0 1 0
0 0 0 1
1
a
b
c
=
1
a+ b+ c
1 + b
c
Vemos que obtenemos b = b + 1, lo que es una contradicción, por lo que f
no tiene puntos fijos. De esta forma, sabemos que Jf es de la forma
Jf =
1 0 0 0
1
0 J~f0
Ahora vamos a buscar la matriz de Jordan de la parte lineal J~f . Empe-
zamos determinando el polinomio característico χf (λ)
χf (λ) =
∣∣∣∣∣∣∣1− λ 1 1
0 1− λ 0
0 0 1− λ
∣∣∣∣∣∣∣ = (1− λ)3
59

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Tenemos un valor propio λ = 1 con multiplicidad 3, por lo que la forma de
J~f es
J~f =
1 0 0
ε1 1 0
0 ε2 1
Para determinar los valores de ε1 y ε2 calculamos dim
(ker(~f −−→id))
= 3 −
rg(
ker(~f −−→id))
rg(
ker(~f −−→id))
=
0 1 1
0 0 0
0 0 0
= 1
ker(~f −−→id)
:= (y + z = 0)
Como dim(
ker(~f −−→id))
= 2 ( 6= 3) alguno de los εi debe ser igual a 1. Tene-
mos dos posibilidades:
J~1 =
1 0 0
1 1 0
0 0 1
J~2 =
1 0 0
0 1 0
0 1 1
Aunque estas dos formas son linealmente equivalentes (reordenando las
cajas), como Jf no tiene puntos fijos, las formas afines de J1 y J2 ni tienen
porqué ser afínmente equivalentes.
J1 =
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 1
J2 =
1 0 0 0
1 1 0 0
0 0 1 0
0 0 1 1
Tenemos que diferenciar cuál de las dos formas es la que corresponde a
nuestro endorfismo. Para ello, utilizaremos el rango, que es un invariante.
ker (J1 − id)2
=
0 0 0 0
0 0 0 0
1 0 0 0
0 0 0 0
⇒ rg(
ker (J1 − id)2)
= 1
ker (J2 − id)2
=
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
⇒ rg(
ker (J2 − id)2)
= 0
60

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Vemos que, efectivamente, J1 y J2 no son afínmente equivalentes. Para
determinar cuál corresponde a el endomorfismo de nuestro enunciado:
ker (Mε (f)− id)2
=
0 0 0 0
0 0 0 0
1 0 0 0
0 0 0 0
⇒ rg(
ker (Mε (f)− id)2)
= 1
Con lo que vemos que Jf = J1.
Jf =
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 1
�
Demostración. 2)
Ahora vamos a buscar un sistema cartesiano de referncia ε′ en el que
Mε′ (f)) = Jf .
Las columnas de Jf son las imágenes por f de ε′, de manera que pode-
mos escribir:
f (O′) = O′ + ~e′1 → ~e′1 = (f − id) (O′)→
→ ~0 =(~f −−→id)(
~e′2
)=(~f −−→id)2 (
~e′1
)=(~f −−→id)3
(O′)⇒
⇒ O′ ∈ ker (Mε (f)− id)3 − ker (Mε (f)− id)
2 − ker (Mε (f)− id)
~f(~e′1
)= ~e′1 + ~e′2 → ~e′2 =
(~f −−→id)(
~e′1
)→ ~0 =
(~f −−→id)(
~e′2
)=(~f −−→id)2 (
~e′1
)⇒ ~e′1 ∈ ker
(~f −−→id)
~f(~e′2
)= ~e′2 → ~0 =
(~f −−→id)(
~e′2
)⇒ ~e′2 ∈ ker
(~f −−→id)
~f(~e′3
)= ~e′3 → ~0 =
(~f −−→id)(
~e′3
)⇒ ~e′3 ∈ ker
(~f −−→id)
Para el origen O′ tenemos
ker (Mε (f)− id)3
=
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
61

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Es decir, que podemos elegir cualquier punto como origen ⇒ elegimos
O′ = (1, 0, 0, 0). Ahora, ~e′1 = (f − id) (O′)
~e′1 =
0 0 0 0
0 0 1 1
1 0 0 0
0 0 0 0
1
0
0
0
=
0
1
0
~e′2 =(~f −−→id)(
~e′1
)=
0 1 1
0 0 0
0 0 0
0
1
0
=
1
0
0
Y finalmente, ~e′3 = ker
(~f −−→id)
(pero independiente de ~e′2)
ker(~f −−→id)
=
0 1 1
0 0 0
0 0 0
x
y
z
=
0
0
0
⇒ y + z = 0
Podemos elegir, por ejemplo
1
0
0
,
0
1
−1
. Como ~e3
′ debe ser lineal-
mente independiente de ~e′2, elegimos
~e3 =
0
1
−1
Y el sistema de referencia ε′ resulta
ε′ =
1
0
0
0
,
0
1
0
,
1
0
0
,
0
1
−1
�
Demostración. 3)
Para determinar las ecuaciones respecto a ε′ de los subespacios afines
invariantes por f conviene recordar la caracterización de los subespacios
afines invariantes:
U = p+ ~U es invariante por f si:
1. ~U es subespacio invariante por ~f .
2. f (p)− p = ~v ∈ ~U , donde p es un punto cualquiera.62

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Al pedir las ecuaciones respecto a ε′ debemos trabajar con la matriz Mε′ (f) =
Jf .
Empezamos por calcular los subespacios invariantes por
J~f =
1 0 0
1 1 0
0 0 1
Rectas invariantes Las rectas invariantes se obtiene al calcular los subes-
pacios ker(~f − λ
−→id)
asociados a cada autovalor λ. En nuestro
caso, sólo tenemos un valor propio, λ = 1
ker(~f −−→id)
=
0 0 0
1 0 0
0 0 0
x
y
z
=
0
0
0
→ ker
(~f −−→id)
:= (x = 0)
Por tanto, todas las rectas contenidas en el plano ~Π := (x = 0)
son rectas vectoriales invariantes.
Planos invariantes De momento, tenemos el plano ~Π := (x = 0). Como es-
tamos en dimensión 3, el número de hiperplanos -planos- in-
variantes coincide con el de rectas invariantes. Como tenemos
infinitas rectas, también tenemos infinitos planos invariantes.
Para calcular las ecuaciones de estos planos, utilizamos
H := (u1x+ u2y + u3z = 0) es hiperplano invariante por ~f ⇐⇒ (u1, u2, u3) autovector de ~f t
J t~f =
1 1 0
0 1 0
0 0 1
u1
u2
u3
=
u1
u2
u3
⇒ u1 + u2 = u1 ⇒ u2 = 0
Tenemos un haz de planos invariantes de la forma
Hα,β := (αx+ βz = 0) α, β ∈ R
El caso ~Π := (x = 0) = Hα,0
El siguiente paso es obtener los subespacios afines invariantes.
Una recta afín invariante R = p + ~R será invariante por f cuando su
recta de vectores asociada ~R sea invariante por ~f y ~v = f (p) − p ∈ ~R. Pero
acabamos de ver que si p ∈ A3 (R), entonces ~v =
1
a
0
⇒ ~v /∈ ~Π := (x = 0),
de manera que no tenemos rectas afines invariantes.63

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Como en el caso de las rectas, vemos que ~v ∈ Hα,β ⇐⇒ α = 0, de mane-
ra que los planos afines invariantes serán los que tengan como dirección
el plano H0,β := (z = 0). Para cualquier punto p =
1
a
b
c
, se cumple que
H = p+ ~H es un plano afín invariante por f si
H =
1
0
0
c
+
⟨ 1
0
0
,
0
1
0
⟩
(Los planos afines invariantes son paralelos al plano z = 0) �
Ejercicio 76. (Ejercicio tipo 2)
Hallar la matriz de Jordan Jf de un endomorfismo afín f de A3 (R) tal
que χf (t) = (t− 1)4, rg
(~f −−→id)
= 1 y f deja invariante al menos una recta
y no tiene puntos fijos.
Demostración. Del polinomio característico χf (t) = (t− 1)4 observamos
que el endorfismo sólo tiene un valor propio, λ = 1, con multiplicidad 4.
Además, el endorfismo no tiene puntos fijos, por lo que la forma de Jordan
será
Jf =
1 0 0 0
1 1 0 0
0 ε1 1 0
0 0 ε2 1
con εi={0, 1}, (i = 1, 2).
Para averiguar el valor de los εi utilizamos
rg(~f −−→id)
= 1 = rg(J ~f −
−→id)
rg(J ~f −
−→id)
=
0 0 0
ε1 0 0
0 ε2 0
= 1
Por lo que uno de los dos εi = 1. Tenemos dos opciones:
J~1 =
1 0 0
1 1 0
0 0 1
J~2 =
1 0 0
0 1 0
0 1 1
64

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Para determinar cuál es la forma correspondiente al endomorfismo del
enunciado, utilizamos la información de que deja al menos una recta in-
variante.
Las rectas invariantes están asociadas a los subespacios de los valores
propios, ker(~f −−→id)
ker(J~1 − ~id
)=
0 0 0
1 0 0
0 0 0
xyz
=
0
0
0
:= (x = 0)
Es decir, que tenemos un plano de rectas invariantes.
~v = f (p)− p ∈ ker(J~1 − ~id
)?
Consideramos un punto cualquiera p =
1
a
b
c
∈ A3
~v = f (p)− p =
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 1
1
a
b
c
−
1
a
b
c
=
1
a
0
/∈ ker(J~1 − ~id
)
Es decir, que no tenemos rectas afines invariantes para el endorfismo
representado por J1, por lo que J1 no puede ser la forma del endomorfismo
que buscamos.
Repetiremos el proceso para J2 como comprobación.
J2 =
1 0 0 0
1 1 0 0
0 0 1 0
0 0 1 1
ker(J~2 −
−→id)
=
0 1 0
0 0 0
0 0 0
xyz
=
0
0
0
:= (y = 0)
En este caso,
~v = f (p)− p =
1 0 0 0
1 1 0 0
0 0 1 0
0 0 1 1
1
a
b
c
−
1
a
b
c
=
1
0
b
∈ ker(J~2 −
−→id)
65
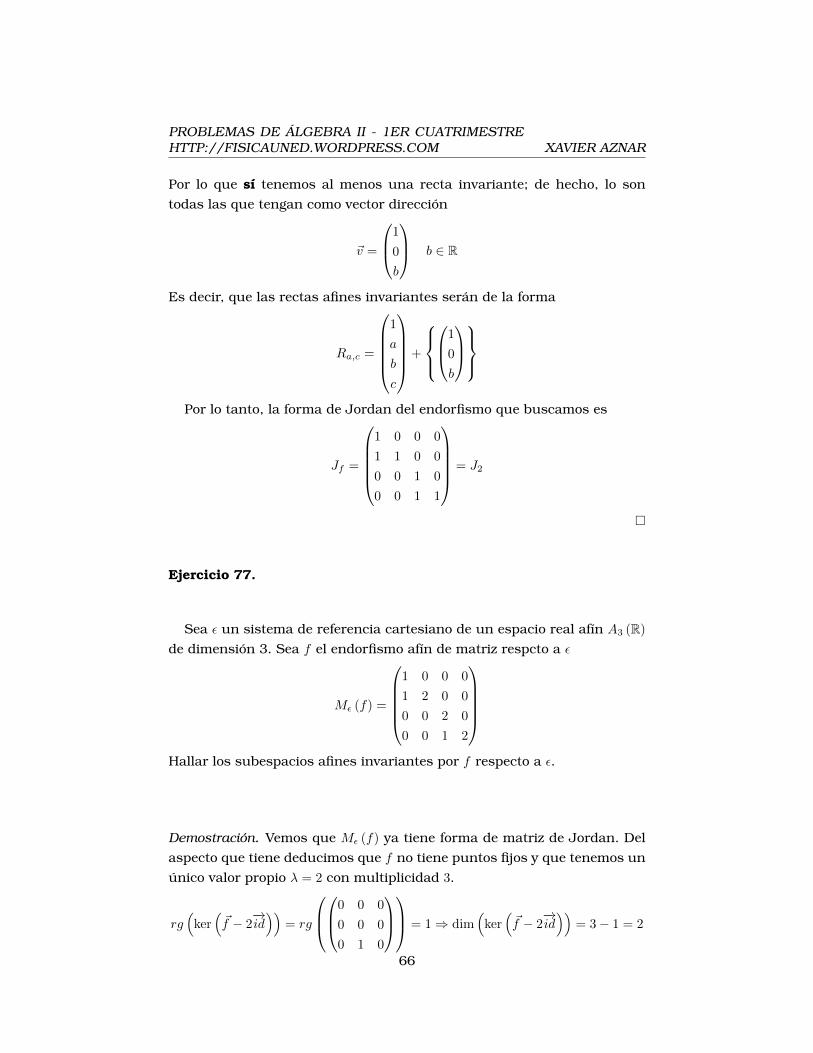
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Por lo que sí tenemos al menos una recta invariante; de hecho, lo son
todas las que tengan como vector dirección
~v =
1
0
b
b ∈ R
Es decir, que las rectas afines invariantes serán de la forma
Ra,c =
1
a
b
c
+
1
0
b
Por lo tanto, la forma de Jordan del endorfismo que buscamos es
Jf =
1 0 0 0
1 1 0 0
0 0 1 0
0 0 1 1
= J2
�
Ejercicio 77.
Sea ε un sistema de referencia cartesiano de un espacio real afín A3 (R)
de dimensión 3. Sea f el endorfismo afín de matriz respcto a ε
Mε (f) =
1 0 0 0
1 2 0 0
0 0 2 0
0 0 1 2
Hallar los subespacios afines invariantes por f respecto a ε.
Demostración. Vemos que Mε (f) ya tiene forma de matriz de Jordan. Del
aspecto que tiene deducimos que f no tiene puntos fijos y que tenemos un
único valor propio λ = 2 con multiplicidad 3.
rg(
ker(~f − 2
−→id))
= rg
0 0 0
0 0 0
0 1 0
= 1⇒ dim
(ker(~f − 2
−→id))
= 3− 1 = 2
66

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Como las columnas de Mε (f) = Jf son las imágenes de los vectores de ~ei
del sistema de referencia, tenemos
~f (~e1) = 2~e1 → ~e1 ∈ ker(~f − 2
−→id)
~f (~e2) = 2~e1 + ~e2
~f (~e3) = 2~e3 → ~e3 ∈ ker(~f − 2
−→id)
Vemos que ~e1 y ~e3 son autovectores de valor propio λ = 2, por lo que
cada uno de ellos genera una recta invariante por ~f . La combinación de
estos vectores propios también da lugar a un plano vectorial invariante~Π = 〈~e1, ~e3〉. Es decir, toda recta ~R ⊂ ~Π = ker
(~f − 2
−→id)
es invariante por ~f .
Fuera del plano ~Π no tenemos más autovectores, por lo que no tenemos
más rectas vectoriales invariantes.
Ahora vamos a buscar los planos vectoriales invariantes. Como esta-
mos en dimensión 3, los hiperplanos invariantes son planos, por lo que
tenemos tantos como rectas invariantes. Para calcularlos, buscamos los
vectores propios de ~f t.~f y ~f t tienen el mismo polinomio característico, por lo que también tie-
nen los mismos valores propios,λt = 2 con multiplicidad 3. Los autovecto-
res de ~f t son vectores ~u =
αβγ
∈ ker(~f t − 2
−→id)
0 0 0
0 0 1
0 0 0
αβγ
=
0
0
0
⇒ γ = 0
ker(~f t − 2
−→id)
:= (γ = 0) =
⟨1
0
0
,
0
1
0
⟩
Es decir: no tenemos puntos fijos. Tenemos todas las rectas conteni-
das en el plano ker(~f − 2
−→id)
:= (y = 0) = H0,β y el haz de planos Hα,β :=
(z = 0) = (αx+ βy = 0).
Ahora buscamos los subespacios invariantes afines.
El primer paso es comprobar si el endorfismo f tiene puntos invarian-
tes:
f (p) = p?
67

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
1 0 0 0
1 2 0 0
0 0 2 0
0 0 1 2
1
a
b
c
=
1
1 + 2a
2b
b+ 2c
1 + 2a = 2→ a = −1
2b = b→ b = 0
b+ 2c = c→ c = 0
De manera que sólo tenemos un punto fijo
p =
1
−1
0
0
Como p es un punto fijo, si ~v = f (p) − p = ~0 ∈ ~U para todo subespacio
vectorial invariante ~U por ~f . Es decir, en este caso, todos los subespacios
vectoriales invariantes también son subespacios afines invariantes por f .
Punto fijo: p =
1
−1
0
0
Rectas: Todas las contenidas en el plano Π := (x = 0) que pasan por
p
Planos: El haz de planos que contiene la recta R = p+ 〈~e3〉
�
Ejercicio 78. (Ejercicio Tipo 1)
Sea ε un sistema de referencia cartesiano del espacio afín real A3 (R) de
dimensión 3. Sa f el endomorfismo afín con matriz respecto a ε
Mε (f) =
1 0 0 0
2 −1 0 −1
0 0 1 0
4 0 0 −1
1. Hallar la forma canónica de Jordan Jf de f .
2. Hallar un sistema de referencia ε′ tal que Mε′ (f) = Jf .
3. Hallar todas las ecuaciones respecto de ε′ de los subespacios afines
invariantes por f .
Demostración. 1)68

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Para calcular la forma de Jordan Jf de f , primero buscamos si f tiene
puntos fijos. ¿f (p) = p?1 0 0 0
2 −1 0 −1
0 0 1 0
4 0 0 −1
1
a
b
c
=
1
2− a− cb
4− c
a = 2− a− c→ a = 0
b = b
c = 4− c→ c = 2
Es decir, que tiene una recta de puntos de la forma
p =
1
0
b
2
b ∈ R
R =
1
0
0
2
+
⟨0
1
0
⟩
Ahora calculamos la matriz de Jordan J~f asociada a la aplicación lineal ~f .
Su polinomio característico es
χ~f (λ) = det∣∣∣Mε
(~f)− λ−→id∣∣∣ =
∣∣∣∣∣∣∣−1− λ 0 −1
0 1− λ 0
0 0 −1− λ
∣∣∣∣∣∣∣ = (1− λ) (1 + λ)2
Tenemos dos valores propios, λ = 1 con multiplicidad 1 y λ = −1 con
multiplicidad 2.
Así tenemos que
J~f =
1 0 0
0 −1 0
0 ε −1
donde ε = {0, 1}. Para determinar su valor, utilizamos el rango
rg(~f +−→id)
= 2 = rg(J~f −
−→id)⇒ ε = 1
69

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
La forma de Jordan para f es
Jf =
1 0 0 0
0 1 0 0
0 0 −1 0
0 0 1 −1
�
Demostración. 2)
Ahora buscamos ε′ ={O′; ~e′1,
~e′2,~e′3
}tal que Mε′ (f) = Jf .
Como p =
1
0
0
2
es un punto fijo, lo podemos seleccionar como origen del
nuevo sistema de referencia
O′ =
1
0
0
2
Para el resto del sistema, escribimos utilizando Jf
J~f
(~e′1
)= ~e′1 → ~e′1 ∈ ker
(~f −−→id)
(9.1)
J~f
(~e′2
)= −~e′2 + ~e3 → ~e′3 =
(~f +−→id)(
~e′2
)(9.2)
⇒ ~e′2 ∈ ker(~f +−→id)2
− ker(~f +−→id)
(9.3)
J~f
(~e′3
)= ~−e′3 → ~e′3 ∈ ker
(~f +−→id)
Empezamos calculando ~e′1 a partir de 9.1
ker(~f −−→id)
=
−2 0 −1
0 0 0
0 0 −2
xyz
=
0
0
0
⇒ x = 0, z = 0
~e′1 =
0
1
0
70
PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Ahora vamos a por ~e′2 a partir de 9.3
ker(~f +−→id)2
=
0 0 −1
0 2 0
0 0 0
0 0 −1
0 2 0
0 0 0
→0 0 0
0 4 0
0 0 0
xyz
=
0
0
0
⇒ y = 0
ker(~f +−→id)
=
0 0 −1
0 2 0
0 0 0
xyz
=
0
0
0
⇒ z = 0, y = 0
Como ~e′2 ∈ ker(~f +−→id)2
− ker(~f +−→id), por lo que
~e′2 =
0
0
1
Y finalmente, por 9.2,
~e′3 =(~f +−→id)(
~e′2
)=
0 0 −1
0 2 0
0 0 0
0
0
1
=
−1
0
0
El sistema ε′ en el que Mε′ (f) = Jf resulta
ε′ =
1
0
0
2
,
0
1
0
,
0
0
1
,
−1
0
0
�
Demostración. 3) 9.4.c
PENDIENTE!!! �
Ejercicio 79. (Ejercicio Tipo 1)
Sea ε un sistema de referencia cartesiano de un espacio afín real de
dimensión 3, A3 (R). Sea f el endomorfismo afín cuya matriz respecto a ε
viene dada por:
Mε (f) =
1 0 0 0
0 −2 0 0
3 −4 0 −1
−2 −2 1 2
1. Hallar la matriz de Jordan Jf de f .
2. Hallar un sistema de referencia ε′ de A3 (R) tal que Mε′ (f) = Jf71

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
3. Hallar las ecuaciones respecto a ε′ de los subespacios afines inva-
riantes por f .
Demostración. 1)
Para encontrar la matriz de Jordan Jf de un endomorfismo afín pri-
mero debemos averiguar si tiene puntos fijos. Para ello, nos preguntamos
¿f (p) = p?, donde p ∈ A3 es un punto cualquier p = (1, a, b, c)
f (p) =
1 0 0 0
0 −2 0 0
3 −4 0 −1
−2 −2 1 2
1
a
b
c
=
1
−2a
3− 4a− c−2− 2a+ b+ 2c
=
1
a
b
c
−2a = a⇒ a = 0
3− c = b⇒ c = 3− b
−2 + b+ 2c = c⇒ c = 2− b
Como vemos, llegamos a una contradicción, lo que significa que f no tiene
puntos fijos. Esto nos indica que la forma de Jf es
Jf =
1 0 0 0
1
0
0
Ahora buscamos la forma canónica de ~f , J~f . Empezamos calculando el
polinomio característico χ~f (t) = det∣∣∣~f − t−→id∣∣∣
χ~f (t) =
∣∣∣∣∣∣∣−2− t 0 0
−4 −t −1
−2 1 2− t
∣∣∣∣∣∣∣ = (2− t) t (2 + t)− (2 + t) = (2 + t) [(t (2− t))− 1] =
= (2 + t)(2t− t2 − 1
)= − (2 + t) (t− 1)
2
Obtenemos dos valores propios t = −2 y t = 1 (con multiplicidad 2). De
manera que la forma canónica para J~f es de la forma:
J~f =
1 0 0
ε 1 0
0 0 −2
72

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Como rg(
ker(~f −−→id))
= 2 tenemos que ε = 1, de manera que, finalmente:
Jf =
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 −2
�
Demostración. 2)
Ahora buscamos un sistema de referencia ε′ ={O′, ~e′1,
~e′2,~e′3
}en el que
Mε′ (f) = Jf .
Las columnas de la matriz de Jordan Jf son las imágenes de ε′ por f ,
de manera que podemos plantear:
f (O′) = O′ + ~e′1 ⇒ ~e′1 = (f − id) (O′)(9.4)
f(~e′1
)= ~e′1 + ~e′2 ⇒ ~e′2 =
(~f −−→id)(
~e′1
)(9.5)
f(~e′2
)= ~e′2 ⇒ ~e′2 ∈ ker
(~f −−→id)
(9.6)
f(~e′3
)= −2~e′3 ⇒ ~e′3 ∈ ker
(~f + 2
−→id)
(9.7)
De las ecuaciones 9.6 y 9.5 vemos que
(9.8) ~e′1 ∈ ker(~f −−→id)2
− ker(~f −−→id)
Podemos obtener ~e′1 a través de la ecuación 9.4 o de 9.8.
Empezamos buscando ~e′3 ∈ ker(~f + 2
−→id):
ker(~f + 2
−→id)
=
0 0 0
−4 2 −1
−2 1 2
x
y
z
=
0
0
0
⇒ z = 0, y = 2x
~e′3 =
1
2
0
73

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Ahora ~e′1 ∈ ker(~f −−→id)2
− ker(~f −−→id):
ker(~f −−→id)
=
−3 0 0
−4 −1 −1
−2 −1 1
x
y
z
=
0
0
0
⇒ x = 0, y + z = 0
ker(~f −−→id)2
=
9 0 0
18 0 2
4 −2 0
x
y
z
=
0
0
0
⇒ x = 0, y = 0, z = 0
Como vemos, ker(~f −−→id)
no nos proporciona información sobre ~e′1. Uti-
lizaremos la segunda vía de la que disponemos en este caso, a través de
9.4:
~e′1 =(~f −−→id)
(O′) =
1 0 0 0
0 −3 0 0
3 −4 −1 −1
−2 −2 1 1
a
b
c
=
−3a
3− 4a− b− c−2− 2a+ b+ c
De manera que tenemos �
Demostración. 3)
Como tenemos que encontrar los subespacios invariantes con ecuacio-
nes respecto a ε′ utilizamos la matriz Jf :
Jf =
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 −2
Empezamos buscando las rectas vectoriales invariantes (asociadas a los
autovalores λ = 1 y λ = −2.
−→R1 = ker
(~J −−→id)
=
0 0 0
1 0 0
0 0 −3
x
y
z
=
0
0
0
→ x = 0 = z ⇒−→R1 =
⟨ 0
1
0
⟩74

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
−→R2 = ker
(~J + 2
−→id)
=
3 0 0
1 3 0
0 0 0
x
y
z
=
0
0
0
→ x = 0 = y ⇒−→R2 =
⟨ 0
0
1
⟩Ahora buscamos los planos invariantes. Como estamos en dimensión 3,
los planos son hiperplanos, y su número coincide con el de rectas inva-
riantes, es decir, dos.
El primer plano invariante es el que contiene las dos rectas vectoriales
invariantes que acabamos de encontrar:
−→Π1 =
⟨ 0
1
0
,
0
0
1
⟩ := (x = 0)
El otro plano vectorial invariante es el que se obtiene de la caja
[
1 0
1 1
]0
0 0 −2
que corresponde a
−→Π2 := (z = 0) =
⟨ 1
0
0
,
0
1
0
⟩
A continuación buscamos los invariantes afines.
De la forma de Jf de f vemos que no hay puntos fijos (el 1 indicado con
flechas), por lo que no los buscamos.
Jf =
1 0 0 0
1 ←↑
(−→f)
0
Sea p un punto cualquiera de A3, p =
1
a
b
c
−→v = f (p)− p =
1
1 + a
a+ b
−2c
−
1
a
b
c
=
1
a
−3c
a, c ∈ R
75

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Vemos que ~v /∈−→R1,−→R2 (ya que x 6= 0 en el caso de ~R1 y z 6=0 en el caso de
~R2).
Por el mismo motivo, ~v /∈−→Π1. Finalmente, vemos que ~v ∈
−→Π2 ⇐⇒ c = 0,
de manera que tenemos un plano afín invariante por f
Π := (z = 0) =
1
a
b
0
+−→Π2 =
1
a
b
0
+
⟨ 1
0
0
,
0
1
0
⟩
�
Ejercicio 80. Sea ε un sistema de referencia cartesiano del espacio afín
A3 (R). Sea f el endomorfismo afín de matriz respecto a ε:
Mε (f) =
1 0 0 0
−3 −4 0 4
1 6 1 −3
3 −1 0 0
con polinomio característico χ~f (t) = (1− t) (t+ 2)
2.
1. Hallar la forma canónica de Jordan Jf de f .
2. Si ε′ es un sistema de referencia tal que Mε′ (f) = Jf , hallar las
ecuaciones respecto a ε′ de los subespacios afines invariantes por
f .
Demostración. 1)
El primer paso para encontrar la forma canónica Jf es averiguar si f
tiene puntos fijos.1 0 0 0
−3 −4 0 4
1 6 1 −3
3 −1 0 0
1
a
b
c
=
1
a
b
c
=
1
−3− 4a+ 4c
1 + 6a+ b− 3c
3− a
9a = 9→ a = 1
−1 = 9a− 9→ a = 8/9
c = 3− a76

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
Llegamos a contradicción, lo que significa que f no tiene puntos fijos y por
tanto, Jf es de la forma
Jf =
1 0 0 0
1 J~f · · ·
0...
. . .
0
De la forma del polinomio característico χ~f (t) observamos que tenemos
dos valores propios, t = 1 y t = −2 (con multiplicidad 2), de manera que
J~f =
1 0 0
0 −2 0
0 ε −2
con ε = {0, 1}. Para determinar ε utilizamos que el rango es un invariante,
de manera que
rg(Mε
(~f)−−→id)
= rg
−2 0 4
6 3 −3
−1 0 2
= 2 =
3 0 0
0 0 0
0 ε 0
⇒ ε = 1
Así que, finalmente,
Jf =
1 0 0 0
1 1 0 0
0 0 −2 0
0 0 1 −2
�
Demostración. 2)
Ahora buscamos las ecuaciones respecto a ε′ de los subespacios inva-
riantes respecto a f . Como queremos las ecuaciones respecto a ε′, utiliza-
mos Mε′ (f) = Jf .
Empezamos buscando las rectas invariantes asociadas a los valores
propios de ~f .
ker(−→f −
−→id)
: =
0 0 0
0 −3 0
0 1 −3
x
y
z
=
0
0
0
−→R1 := (y = 0, z = 0) :=
⟨ 1
0
0
⟩77

PROBLEMAS DE ÁLGEBRA II - 1ER CUATRIMESTREHTTP://FISICAUNED.WORDPRESS.COM XAVIER AZNAR
ker(−→f + 2
−→id)
: =
3 0 0
0 0 0
0 1 0
x
y
z
=
0
0
0
−−→R−2 := (x = 0, y = 0) :=
⟨ 0
0
1
⟩
En cuanto a los planos invariantes vectoriales invariantes, como esta-
mos en dimensión tres, los planos son hiperplanos, y por tanto, su número
coincide con el de rectas invariantes.
El primer plano es el que contiene las rectas invariantes−→R1 y
−−→R−2, es
decir
−→Π1 := (y = 0) :=
⟨ 1
0
0
,
0
0
1
⟩
El segundo plano lo obtenemos a partir de los autovectores de−→f t. Si
H := (u1x+ u2y + u3z = 0) es invariante por ~f , entonces (u1, u2, u3) es un
autovector de−→f t. 1 0 0
0 −2 1
0 0 −2
u1
u2
u3
=
u1
u2
u3
u1 = u1
−2u2 + u3 = u2 ⇒ u2 = 0
−2u3 = u3 ⇒ u3 = 0
De manera que el plano invariante−→Π2 := (1, 0, 0) := (x = 0) �
78
ÍNDICE ALFABÉTICO
Aplicación lineal, 2
Aplicación lineal biyectiva, 3
Aplicación lineal inyectiva, 3
Aplicación lineal suprayectiva, 3
Autovalor, 4
Autovector, 4
Endomorfismos afínmente equivalentes,
30
Equivalencia lineal entre dos
endomorfismos lineales, 12
Homotecia, 3
Homotecia afin, 47
Imagen, 2
Matrices semejantes, 3
Matriz asociada a una homotecia, 47
Matriz de Jordan de una dilatación, 48
Matriz de Jordan de una homotecia, 48
Matriz de Jordan de una proyección, 7
Matriz de Jordan de una simetría, 8
Matriz de una traslación, 29
Matriz diagonalizable, 5
multiplicidad, 4
Núcleo, 2
Polinomio característico, 4, 7, 13
Polinomio mínimo, 7
Polinomio mínimo de un endorfismo
nulo, 6
Polinomio mínimo de una homotecia
vectorial, 6
Polinomio mínimo de una proyección, 7
Polinomio mínimo de una simetría
vectorial, 7
Procedimiento general para encontrar la
matriz de una simetría (o proyección)
afín, 33
Proyección, 3, 7
Proyección afín, 33
Rango, 13
Rotaciones en el plano, 4
Simetría, 3, 8
Simetría afín, 33
Subespacio afín invariante, 57
Subespacio propio, 5
Teorema de clasificación afín de
dilataciones, 57
Teorema de clasificación afín para
deformaciones, 57
Teorema de clasificación afín para las
deformaciones con deslizamiento, 57
Teorema de clasificación afín para
proyecciones afines, 57
Teorema de clasificación afín para
simetrías afines, 57
Valor propio, 4
Vector propio, 4
79
![Manual%20soldador 1parte[1]](https://static.fdocuments.ec/doc/165x107/55c2ef51bb61ebb8518b45ca/manual20soldador-1parte1.jpg)