Principio de d
7
CARRERA DE INGENIERIA MECANICA AUTOMOTRIZ. MATERIA: DISEÑO MECANICO 5 to CICLO. Nombre: RIVERA CARAVAJO JUAN ANDRES. MATERIA: Principio de D’ Alembert y Trabajo Virtual PROFESOR: M.I. Jonathan Pozo Palacios.
-
Upload
omar-stalin-duran-caisaguano -
Category
Documents
-
view
216 -
download
3
description
diseño mecanico
Transcript of Principio de d

CARRERA DE INGENIERIA MECANICA AUTOMOTRIZ.
MATERIA:
DISEÑO MECANICO
5to CICLO.
Nombre:
RIVERA CARAVAJO JUAN ANDRES.
MATERIA:
Principio de D’ Alembert y Trabajo Virtual
PROFESOR:
M.I. Jonathan Pozo Palacios.
Octubre 2014- Marzo 2015.
INTRODUCCION

El siguiente informe tiene la finalidad de demostrar el principio de D’ Alembert y Trabajo Virtual, en las que consiste en una pequeña modificación de las segunda ley y tercera ley de newton donde requiere cualquier sistema de fuerzas dinámicas mediante el método newtoniano. Estos temas nos abortan el tema del balanceo y ayuda a visualizar los efectos de balance de masas en el sistema. Por lo general se requiere utilizar la solución newtoniana más completa para obtener información sobre las fuerzas de juntas de pasador, de modo que los pasadores y eslabones puedan analizarse en cuanto a falla por esfuerzo.
1. Objetivos
1.1 Objetivo General
Conocer el principio de D’ Alembert y Trabajo Virtual e implementar en eslabones.
1.2 Objetivos Específicos
Explicar el principio de D’ Alembert. Conocer el principio de trabajo virtual. Plantear ejercicios aplicando el principio de D’ Alembert y trabajo virtual.
2. Marco Teórico2.1. Principio de D’ Alembert
El principio de D’ Alembert conociste en resolver cualquier sistema de fuerzas dinámicas mediante el método newtoniano. Donde el matemático Rond d’ Alembert, reacomodo las ecuaciones de Newton para crear una situación “cuasiestatica” a partir de una dinámica. Este principio consiste en recorrer los términos del lado derecho al izquierdo, cambiando los signos algebraicos en el proceso como se requiriera en la que se obtiene un problema de estática o conocido como problema “cuasiestatico”. Este método útil y popular facilita un tanto la solución de problemas de análisis de fuerzas dinámicas cuando los métodos de elección son soluciones vectoriales gráficas. (1)
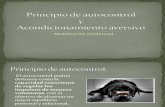
2.2. Deducción de principio de D’ AlembertEl principio de D’ Alembert figura 1a muestras que gira una masa en el extremo de una cuerda flexible, pero inextensible, a una velocidad constante w y radio constante r. La figura 1b muestra diagramas de cuerpo libre “puros” de ambos miembros de este sistema, el eslabón de bancada (1) y el eslabón rotatorio (2). La única fuerza real que actúa en el eslabón 2 es la fuerza del eslabón 1 en el 2, F12. Como la aceleración angular es cero en este ejemplo, la aceleración que actúa en el eslabón es solo la componente rw 2, la cual es la aceleración centrípeta, es decir, dirigida hacia el centro. (1)
Figura 1. Principio de D’ Alembert.La fuerza en el pasador según la ecuación de Newton.
F12=mr ω2

Donde se aplica la tercera ley de newton “Cada acción tiene una reacción igual y opuesta”, donde los eslabones ejercen fuerzas ya sea el eslabón 2 al eslabón 1.−F12=F21
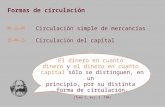
Por tanto, la fuerza de reacción en el eslabón 1 es la centrifuga, no la fuerza en el eslabón 2.Desde luego, esta es la fuerza de reacción que su mano (eslabón 1) siente, y esto da lugar a la popular concepción de que algo jala centrífugamente del peso rotatorio. Ahora se verá esto desde el punto de vista de d’Alembert. La figura 1c muestra otro conjunto de diagramas de cuerpo libre construido de acuerdo con el principio de d’Alembert. Se muestra una fuerza de inercia negativa ma aplicada a la masa en el eslabón 2.
Figura 2. Principio de D’ Alembert.
La fuerza en el pasador según la ecuación de d’ Alembert es:F12−mr ω2=0
F12=mr ω2
Esta es la fuerza centrífuga la que se le acredita mantener tensa la cuerda.
2.3. Métodos de energía: Trabajo VirtualUn sistema mecánico (solido rígido), interconectado con pares cinemáticos, están en equilibrio si es nulo, el trabajo producido por la fuerzas aplicadas en la realización de pequeños desplazamientos virtuales, compatibles con la ligaduras (restricciones o enlaces) del sistema.
Tipos de fuerzas “Actuantes” Interiores: Se trasmiten de partículas den partículas Exteriores: Fuerzas de los enlaces y fuerzas aplicadas
E s t a l e y s e c o n o c e c o n e l n o m b r e d e Principio de los Trabajos Virtuales y r e p r esenta una de las herramientas más ´útiles para el estudio de tales sistemas. En el ejemplo, algo trivial, que analizamos en la sección anterior, esta ley nos indica que para que el sistema esté en equilibrio, debe darse una relación muy particular entre las masas y los ´ángulos de los planos inclinados. (2)El trabajo se define como el producto punto de la fuerza por el desplazamiento. Puede ser positivo, negativo o cero y es una cantidad escalar.
W = F⋅RComo la fuerza en las juntas de pasador entre eslabones no tiene un desplazamiento relativo asociado con ellos, no realizan trabajo en el sistema y por tanto no aparecerán en la ecuación de trabajo.El trabajo realizado por el sistema más las perdidas es igual a la energía entregada al sistema.
E =W + PerdidasEl subíndice k representa cada uno de los n eslabones o elementos móviles en el sistema, comenzando con el eslabón 2 porque el 1 es el eslabón de bancada. Obsérvese que todas las velocidades y aceleraciones angulares y lineales en esta ecuación deben calcularse, en todas las posiciones del mecanismo de interés, mediante un análisis cinemático previo. Asimismo, se deben conocer todas las masas y momentos de inercia de masa para todos los eslabones

móviles. Se puede utilizar el principio de d’Alembert para reacomodar esta ecuación, y “denominar” con más facilidad los términos para propósitos de análisis. (2)
La ecuación 10.28b se conoce como ecuación de trabajo virtual, el cual es un nombre un tanto inapropiado, puesto que en realidad es una ecuación de potencia, como se deduce de sus unidades.Cuando se aplica este método de análisis a un problema de estática, no existe movimiento. El termino trabajo virtual se deriva del concepto de que cada fuerza provoca un desplazamiento infinitesimal o virtual del elemento del sistema estático al cual se aplica durante un tiempo delta infinitesimal. (3)
2.4. Aplicación En el mecanismo de la figura, la barra AB posee longitud L, y la barra CD, también de longitud L, se mantiene perpendicular a la guía recta fija EF. En la posición representada, la distancia horizontal desde A hasta E es L/4, y la distancia vertical desde B hasta E es L/2.
a) Determinar el número de grados de libertad del mecanismo.b) Calcular las distancias BC y EC en la posición de la figura.c) Si la barra AB se mueve con velocidad angular constante, obtener la velocidad del punto C de la barra CD.d) Obtener también la aceleración del punto C de la barra CD.e) Si el mecanismo es movido mediante un motor rotativo situado en A, la barraAB posee masa despreciable, y la barra CD posee masa M, calcular, en la posición representada: par aplicado por el motor rotativo en A, y reacciones en las uniones A, B y C. El sistema se halla sometido a la acción de la gravedad.A)
{ n=3PJ=2PII=1
ρ=3 (3−1 )−2∗2−1ρ=1
B)

√32
BC +12
EC= L2
BC= L8
√32
L+ 12
EC= L4+ √3
2EC EC=(1−√3
8 )L
C) NB= VB+ Vr
V a=√32
WL=Nc
Nr=12
WL
D)
QB=Qa+Qr+Q cr
3. Referencias1. Diseño de Maquinaria. [aut. libro] Robert L. Norton. Diseño de Maquinaria. Cuenca : Previous editions, 2004, pág. 490.
2. lim.ii. lim.ii. [En línea] 01 de Enero de 2014. [Citado el: 20 de Enero de 2015.] http://lim.ii.udc.es/docencia/iin-teomaq/tema4d.pdf.
3. imem. imem. [En línea] [Citado el: 18 de Enero de 2014.] http://www.imem.unavarra.es/mecanica-2ii/download/_Gen_TeXlive_pdfLaTeX_PVFinCurso2008-09-150ppp.pdf.