PABLO MART IN GAGLIARDI - Argentina.gob.arricabib.cab.cnea.gov.ar/34/1/1Gagliardi.pdf · Pablo Mart...
44
PROYECTO INTEGRADOR CARRERA DE INGENIERIA ´ NUCLEAR M ODELADO DE C OMPONENTES DE UN R EACTOR N UCLEAR U TILIZANDO M ATLAB -S IMULINK P ABLO MARTIN ´ G AGLIARDI Director: Ing. Andres ´ Etchepareborda Instituto Balseiro Centro Atomico ´ Bariloche Universidad Nacional de Cuyo Junio 2005
Transcript of PABLO MART IN GAGLIARDI - Argentina.gob.arricabib.cab.cnea.gov.ar/34/1/1Gagliardi.pdf · Pablo Mart...

PROYECTO INTEGRADORCARRERA DE INGENIERIA´ NUCLEAR
MODELADO DE C OMPONENTES DE UN REACTOR
NUCLEAR UTILIZANDO MATLAB-S IMULINK
PABLO MARTIN´ GAGLIARDI
Director:Ing. Andres´ Etchepareborda
Instituto BalseiroCentro Atomico´ Bariloche
Universidad Nacional de Cuyo
Junio 2005

i

Dedicado a mis viejo s
i i
Resumen
La finalidad de este trabajo es la confeccion´ de componentes de biblioteca para lasimulacion´ de distintas partes de un reactor nuclear. Puntualmente los componentes quese han modelado son dos: un tanque que en su interior contiene agua lıquida´ y vapor enestado de saturacion´ , y una seccion´ de canerıa˜ ´ en cuyo interior puede circular agua enestado lıquido´ , vapor, o ambos en un flujo bifasico´ .
El trabajo muestra las ecuaciones utilizadas y de que manera se ha encarado la imple-mentacion´ , la cual se ha realizado en el entorno de programacion´ Matlab-S imulink. Elpaso de tiempo de los modelos es discreto y fijo.
En el caso del tanque se plantea un equilibrio termodinamico´ entre ambas fases entodo momento, y no contempla el caso de que exista solo´ una de ellas.
En el caso de la seccion´ de canerıa˜ ´ se plantea flujo homogeneo´ cuando existen dosfases, es decir que se lo trata como si fuera un fluıdo´ en una sola fase, pero con las pro-piedades promedio del lıquido´ y el vapor. Ademas´ considera perdidas´ de carga por fric-cion´ distribuıda´ y concentrada, y diferencias de altura entre la entrada y la salida delflujo.
A fin de conectar los diferentes componentes de librerıa´ , cada uno de ellos recibe unadeterminada informacion´ de otros componentes, y devuelve un cierto estado de sus varia-bles internas.
i i i

Abstract
The primary ob jective of this work is the development of library components for thesimulation of different parts of nuclear reactors. Specifically, two components have beenmodelled: a tank in which there is water and saturated steam, and a pipe sectionthrough which it may flow liquid water, steam or both in two-phase flow.
This work shows the equations that have been used and the way in which they havebeen implemented, which have been carried out in the MATLAB-S imulink programmingenvironment. The time step for the models is discrete and fixed.
For the tank case a thermo-dynamic equilibrium between phases is considered at alltimes, and does not contemplate the situation in which one of them do not exist .
As for the pipe section, if both phases exists, a homogeneus flow is considered, that isto say that is treated as if it was a one-phase flow, but with properties averaged betweensteam’ s and liquid’ s . Furthermore, it ’ s considered distributed and concentrated frictionfor head-loss, as well as a height difference between inlet and outlet .
In order to connect the different library components, each of them receives a deter-mined information from the other components, and gives back a certain state of itsinternal variables.
iv

Indice´
Indice´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Modelo de tanque con agua en saturacion´ . . . . . . . . . . . . . . . . . . . . . . . . 1
Ecuaciones constitutivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Implementacion´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Evaluacion´ del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Modelo de seccion´ de canerıa˜ ´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Ecuaciones constitutivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Conservacion´ de la masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Conservacion´ del momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Conservacion´ de la energıa´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Factores de friccion´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Implementacion´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Implementacion´ para agua lıquida´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 0Implementacion´ para dos fases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 3Transicion´ entre una implementacion´ y otra . . . . . . . . . . . . . . . . . . . . . . 1 4
Analisis´ de estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 5Evaluacion´ del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 7
Modelo de tanque y de canerıa˜ ´ en conjunto . . . . . . . . . . . . . . . . . . . . . . 22
Bibliografıa´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Tabulado de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Diagramacion´ del Proyecto Integrador . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Aprendizaje MATLAB-SIMULINK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Familiarizacion´ con metodos´ existentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Busqueda´ bibliografica´ tanque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Llenado de tablas tanque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Confeccion´ programa tanque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Pruebas y correcciones tanque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Busqueda´ bibliografica´ canerıa˜ ´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Llenado de tablas canerıa˜ ´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Confeccion´ programa canerıa˜ ´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Pruebas y correcciones canerıa˜ ´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Redaccion´ del informe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Evaluacion´ Economica´ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Agradecimientos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
v
CAPITULO´ I
Modelo de tanque con agua en saturacion´
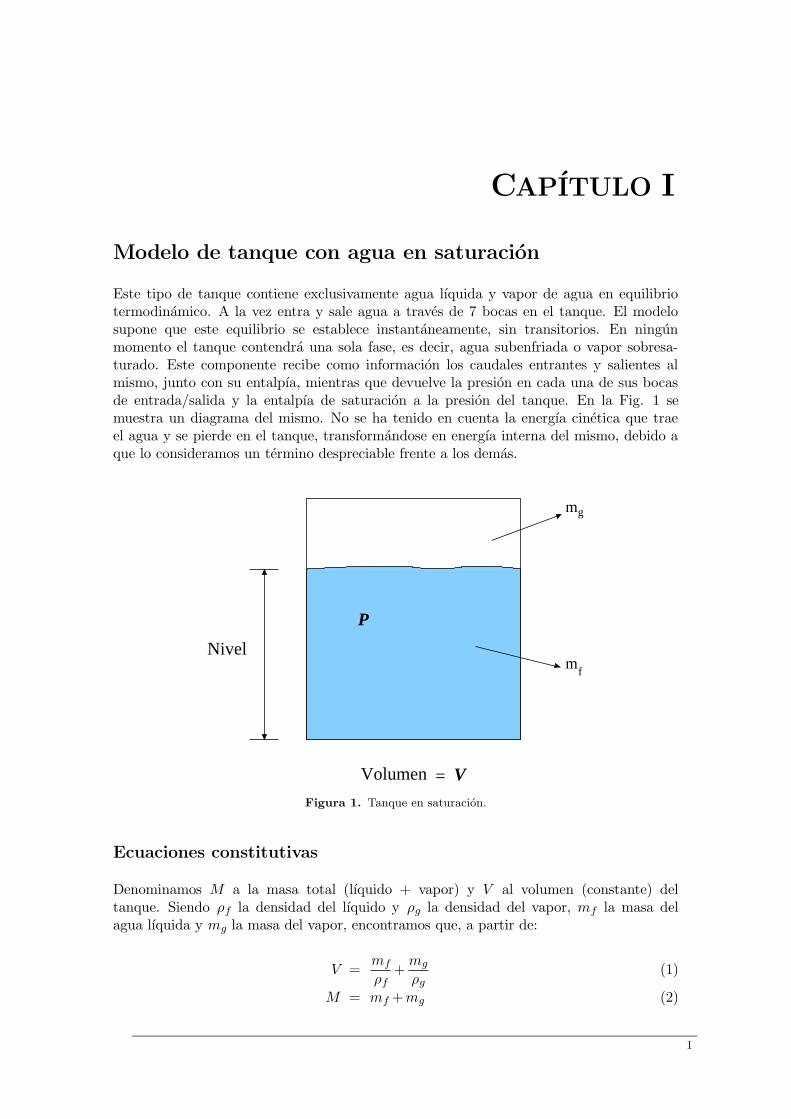
Este tipo de tanque contiene exclusivamente agua lıquida´ y vapor de agua en equilibriotermodinamico´ . A la vez entra y sale agua a traves´ de 7 bocas en el tanque. El modelosupone que este equilibrio se establece instantaneamente´ , sin transitorios. En ningun´momento el tanque contendra una sola fase, es decir, agua subenfriada o vapor sobresa-turado. Este componente recibe como informacion´ los caudales entrantes y salientes almismo, junto con su entalpıa´ , mientras que devuelve la presion´ en cada una de sus bocasde entrada/salida y la entalpıa´ de saturacion´ a la presion´ del tanque. En la Fig. 1 semuestra un diagrama del mismo. No se ha tenido en cuenta la energıa´ cinetica´ que traeel agua y se pierde en el tanque, transformandose´ en energıa´ interna del mismo, debido aque lo consideramos un termino´ despreciable frente a los demas´ .
Volumen V=
mg
mf
P
Nivel
Figura 1 . Tanque en saturacion´ .
Ecuaciones constitutivas
Denominamos M a la masa total ( lıquido´ + vapor) y V al volumen ( constante) deltanque. S iendo ρf la densidad del lıquido´ y ρg la densidad del vapor, mf la masa delagua lıquida´ y mg la masa del vapor, encontramos que, a partir de:
V =mf
ρf+mg
ρg( 1 )
M = mf + mg ( 2 )
1

Resulta:
mf =M − ρg · V
1 − ρgρf
( 3)
mg =ρf · V − M
ρfρg− 1
( 4)
La energıa´ contenida en el tanque es:
E = ef · mf + e g · mg ( 5 )
La escribiremos de la siguiente manera por conveniencia:
E =
(ef +
pρf
)· mf +
(e g +
pρg
)· mg − p ·
(mf
ρf+mg
ρg
)( 6)
( 7)
E = h f · mf + h g · mg − p · V ( 8)
Utilizando ( 1 ) y ( 2 ) obtenemos:
V − Mρf
=
(1ρg− 1ρf
)mg
Y si ademas´ utilizamos la relacion´ H = h f · mf + h g · mg :
H − hf · M = ( h g − h f ) · mg
Despejamos mg de estas dos ultimas´ ecuaciones e igualamos:
H − h f · Mh g − h f
=V − M
ρf1
ρg− 1
ρf
Operando obtenemos:
H =h g − hf1
ρg− 1
ρf
· V +h f · ρf − h g · ρg
ρf − ρg· M ( 9)
Llamamos:
f1 =h g − hf1
ρg− 1
ρf
( 1 0)
f2 =hf · ρf − h g · ρg
ρf − ρg= h g − f1
ρg( 1 1 )
( 1 2 )
Pablo Martın´ Gagliardi
2

Y llegamos a:
H = f1 · V + f2 · M ( 1 3)
Notemos que las propiedades del agua dependen de p y de T , pero estas dos no sonindependientes entre sı trabajando en saturacion´ , entonces podemos poner todas las pro-piedades en funcion´ de solo´ una de ellas, y en nuestro caso sera p . Ergo f1 y f2
dependen solamente´ de p , y si derivamos respecto al tiempo, tenemos:
H =
(d f1
d p· V +
d f2
d p· M
)· d pd t
+ f2 · M ( 1 4)
La conservacion´ de la masa establece:
M = Win − Wout ( 1 5 )
donde:
Win : caudal masico´ entrante[k g
s
]
Wout : caudal masico´ saliente[k g
s
]
La variacion´ de la energıa´ la obtenemos derivando ( 8) e insertando ( 1 4) :
E = H − d pd t· V =
(d f1
d p· V +
d f2
d p· M
)· d pd t
+ f2 · M − d pd t· V
Sabemos que el aumento de energıa´ esta dado por h in · Win − hout · Wout + Q , de maneraque:
(d f1
d p· V +
d f2
d p· M
)· d pd t
+ f2 · M − d pd t· V = h in · Win − hout · Wout + Q
h in : entalpıa´ especıfica´ del agua entrante[J
k g
]
hout : entalpıa´ especıfica´ del agua saliente[J
k g
]
Q : calor entrante en el tanqueDespejando:
d pd t
=
[ (d f1
d p− 1
)· V +
d f2
d p· M
] − 1
·(h in · Wi n − hout · Wout + Q − f2 · M
)( 1 6)
Este valor ded p
d tnos permite conocer la evolucion´ de la presion´ en el tanque; esta presion´
junto con la masa M describen completamente al sistema.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
3

En sıntesis´ , en las ecuaciones ( 4) , ( 1 5 ) y ( 1 6) se basa principalmente la implementa-cion´ . Recordar que nos basamos en todo momento en un caso de equilibrio termodi-namico´ , es decir, que la velocidad de transferencia de masa de una fase a otra tiende ainfinito.
Implementacion´
Puesto que trabajamos con intervalos de tiempo discretos, utilizaremos el supraındice´ kpara denotar el tiempo actual, y k+ 1 para el intervalo siguiente.
Habiendo actualizado todas las variables al tiempo k , leemos de las entradas los cau-dales ( W ) , las entalpıas´ ( h ) , y el calor entrante ( Q ) , que seran´ consideradas del intervalok+ 1 ; considerando:
M = Wink+ 1 − Wout
k+ 1
Calculamos, a partir de ( 1 6) :
d p
d t
k+ 1=
[ (d f1
d p
k− 1
)· V +
d f2
d p
k· Mk
] − 1
·(h i nk+ 1 · Win
k+ 1 − houtk+ 1 · Woutk+ 1 + Qk+ 1 − f2 · M
)
Este ultimo´ es utilizado para calcular la presion´ en el paso siguiente segun´ :
pk+ 1 = pk +d pd t
k+ 1· Ts
La masa total se obtiene de la formula´ :
M = M · Ts = (Wink+ 1 − Wout
k+ 1 ) · Ts
Y ahora con p y M calculamos la entalpıa´ , el nivel de agua, y cualquier condicion´ en eseinstante.
Evaluacion´ del modelo
Es momento de corroborar el funcionamiento del modelo, sometiendolo´ a una serie depruebas correspondientes a distintas situaciones en las que el tanque se puede encontrar,y acerca de las cuales tenemos una idea de cual´ debe ser la evolucion´ de las variables delmismo.
Mostraremos un caso en el que un tanque cuyo volumen es 1 0m3 , con una masa ini-cial de agua ( lıquido´ y vapor) de 8000 kg y una presion´ de 1 05 Pa ( aproximadamente unaatmosfera´ ) , recibe agua a traves´ de una de las entradas, cuya entalpıa´ especıfica´ es de 1 ,5 · 1 06J/kg, e ingresa con un caudal que depende de la presion´ en el tanque, a saber:
W = 0 , 03 · Phigh − p√ [
kgs
]
Donde:
Pablo Martın´ Gagliardi
4
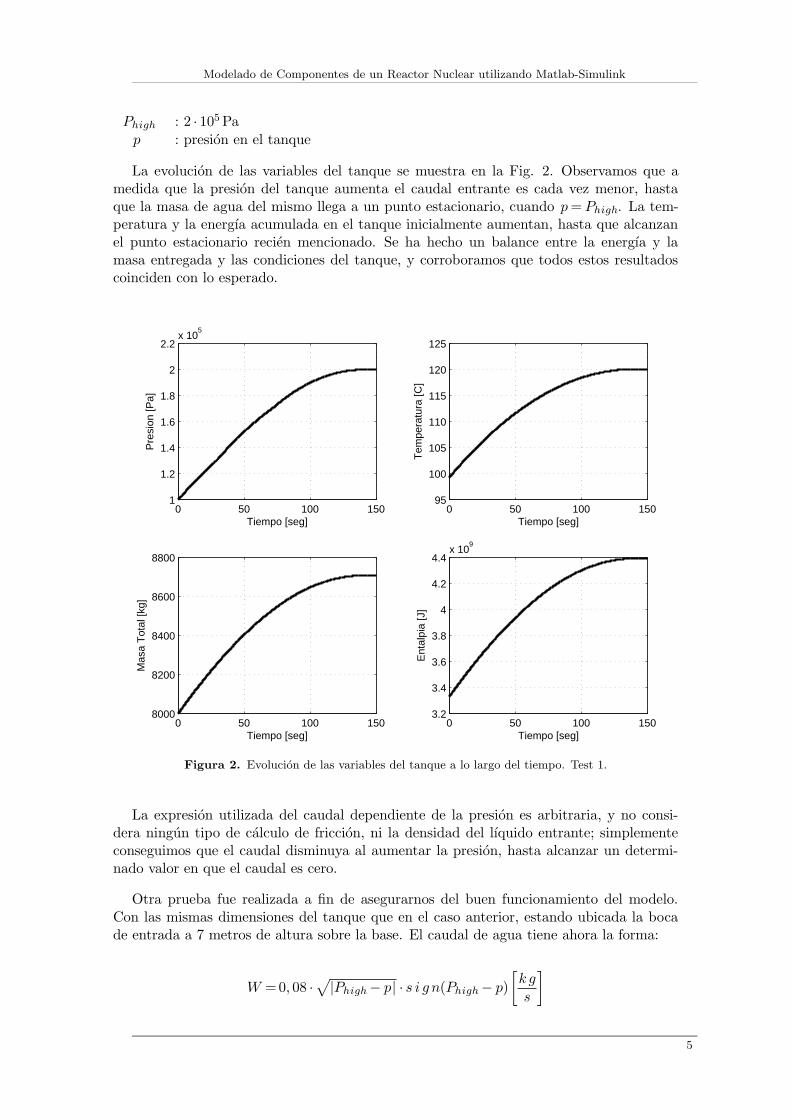
Phigh : 2 · 1 05 Pap : presion´ en el tanque
La evolucion´ de las variables del tanque se muestra en la Fig. 2 . Observamos que amedida que la presion´ del tanque aumenta el caudal entrante es cada vez menor, hastaque la masa de agua del mismo llega a un punto estacionario, cuando p= Phigh . La tem-peratura y la energıa´ acumulada en el tanque inicialmente aumentan, hasta que alcanzanel punto estacionario recien´ mencionado. Se ha hecho un balance entre la energıa´ y lamasa entregada y las condiciones del tanque, y corroboramos que todos estos resultadoscoinciden con lo esperado.
0 50 100 1501
1.2
1.4
1.6
1.8
2
2.2x 10
5
Tiempo [seg]
Pre
sion
[Pa]
0 50 100 15095
100
105
110
115
120
125
Tiempo [seg]
Tem
pera
tura
[C]
0 50 100 1508000
8200
8400
8600
8800
Tiempo [seg]
Mas
a T
otal
[kg]
0 50 100 1503.2
3.4
3.6
3.8
4
4.2
4.4x 10
9
Tiempo [seg]
Ent
alpi
a [J
]
Figura 2 . Evolucion´ de las variables del tanque a lo largo del tiempo. Test 1 .
La expresion´ utilizada del caudal dependiente de la presion´ es arbitraria, y no consi-dera ningun´ tipo de calculo´ de friccion´ , ni la densidad del lıquido´ entrante; simplementeconseguimos que el caudal disminuya al aumentar la presion´ , hasta alcanzar un determi-nado valor en que el caudal es cero.
Otra prueba fue realizada a fin de asegurarnos del buen funcionamiento del modelo.Con las mismas dimensiones del tanque que en el caso anterior, estando ubicada la bocade entrada a 7 metros de altura sobre la base. El caudal de agua tiene ahora la forma:
W = 0 , 08 · | Ph igh − p |√
· s i g n(Phigh − p)[k gs
]
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
5
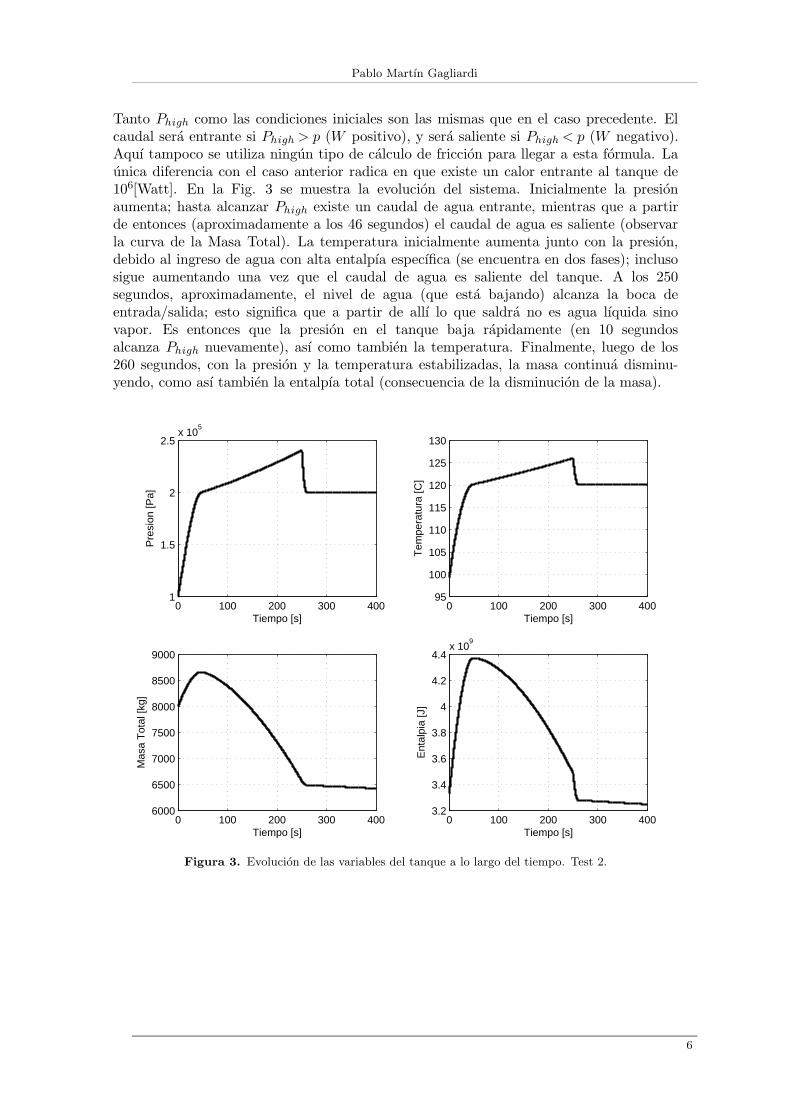
Tanto Ph igh como las condiciones iniciales son las mismas que en el caso precedente. Elcaudal sera entrante si Ph igh > p (W positivo) , y sera saliente si Phigh < p (W negativo) .Aquı tampoco se utiliza ningun´ tipo de calculo´ de friccion´ para llegar a esta formula´ . Launica´ diferencia con el caso anterior radica en que existe un calor entrante al tanque de1 06 [Watt] . En la Fig. 3 se muestra la evolucion´ del sistema. Inicialmente la presion´aumenta; hasta alcanzar Ph igh existe un caudal de agua entrante, mientras que a partirde entonces ( aproximadamente a los 46 segundos) el caudal de agua es saliente ( observarla curva de la Masa Total) . La temperatura inicialmente aumenta junto con la presion´ ,debido al ingreso de agua con alta entalpıa´ especıfica´ ( se encuentra en dos fases) ; inclusosigue aumentando una vez que el caudal de agua es saliente del tanque. A los 250segundos, aproximadamente, el nivel de agua ( que esta bajando) alcanza la boca deentrada/salida; esto significa que a partir de allı lo que saldra no es agua lıquida´ sinovapor. Es entonces que la presion´ en el tanque baja rapidamente´ ( en 1 0 segundosalcanza Phigh nuevamente) , ası como tambien´ la temperatura. Finalmente, luego de los260 segundos, con la presion´ y la temperatura estabilizadas, la masa continua disminu-yendo, como ası tambien´ la entalpıa´ total ( consecuencia de la disminucion´ de la masa) .
0 100 200 300 4001
1.5
2
2.5x 10
5
Tiempo [s]
Pre
sion
[Pa]
0 100 200 300 40095
100
105
110
115
120
125
130
Tiempo [s]
Tem
pera
tura
[C]
0 100 200 300 4006000
6500
7000
7500
8000
8500
9000
Tiempo [s]
Mas
a T
otal
[kg]
0 100 200 300 4003.2
3.4
3.6
3.8
4
4.2
4.4x 10
9
Tiempo [s]
Ent
alpi
a [J
]
Figura 3. Evolucion´ de las variables del tanque a lo largo del tiempo. Test 2 .
Pablo Martın´ Gagliardi
6
CAPITULO´ II
Modelo de seccion´ de canerıa˜ ´
Lo denominaremos indistintamente seccion´ de canerıa˜ ´ o simplemente cano˜ , y esta com-puesto por un conducto de area´ constante, que a partir de las ecuaciones de masa,momento y energıa´ calcula el caudal de fluıdo´ circulante a partir de las condiciones depresion´ en sus extremos; contempla la friccion´ concentrada o distribuıda´ que puedaexistir, y en el caso de que haya una diferencia de areas´ entre este´ y otro componente, lainterfaz sera abrupta; no se consideraran´ cambios graduales de seccion´ .
La seccion´ de canerıa˜ ´ recibe como dato la presion´ en cada uno de sus extremos y laentalpıa´ de entrada, y devuelve como resultado los caudales masicos´ y la entalpıa´ desalida.
El agua circulante puede estar en una o dos fases ( agua + vapor) y se utiliza unmodelo de flujo homogeneo´ , con propiedades promediadas de ambas fases [ Wallis ] . Enconsecuencia, se utilizaron todas las relaciones validas´ para flujo en simple fase, y en casode existir dos fases, se consideraron propiedades especıficas´ para vapor y lıquido´ satu-rado, interpoladas linealmente mediante el tıtulo´ .
Ecuaciones constitutivas
A pesar de que en el modelo el paso de tiempo es discreto, al mostrar las ecuaciones lavariable temporal sera continua. Recien´ en la siguiente seccion´ se mostraran´ las variablescomo discretas.
Comenzaremos mencionando las variables con las que trabajaremos:
A : area´ del cano˜L : longitud del cano˜W : caudal masico´µ : viscosidadρ : densidad del fluıdo´ν : volumen especıfico´x : t ıtulo´ del vaporh : entalpıa´ especıfica´ del fluıdo´V : velocidad del fluıdo´
Subındices´ :
in : correspondiente al fluıdo´ entranteout : correspondiente al fluıdo´ saliente
f : correspondiente a la fase lıquida´g : correspondiente a la fase vapor
Cuando nos referimos a las variables sin subındices´ , estamos hablando de las propie-dades medias del fluıdo´ dentro del conducto. Son validas´ las siguientes relaciones:
7

Vout =Wou t
Aou t · ρou t Vin =Wi n
Ai n · ρi nV =
Wi n + Wou t
2 · A · ρ ν = x · νg + ( 1 − x) · νfµ =
x
µg+
( 1 − x )
µfx =
h − hfhg − hf
Dadas las diferentes propiedades del agua, ya sea que estemos trabajando en una solafase o en dos, se han utilizado dos implementaciones distintas del modelo, pasando deuna a otra segun´ sea el caso. Llas ecuaciones constitutivas, comunes a ambos, son lassiguientes [ White] :
Conservacion´ de la masa
dρd t· A · L = Win − Wout ( 1 7)
Conservacion´ del momento
A · L · d(V · ρ)d t
+ Wout · Vout − Win · Vin + ( pout − pin) · A + ρ · g · A · ( zout − zi n)= ( ∆Ppump− ∆Pf ) · A
Donde ∆Pf contempla friccion´ distribuıda´ y concentrada:
∆Pf =f · ρ · V2 · L
2D�
Dis tri buida
+Kc · ρ · V2
2�
Concentrada
( 1 8)
Y ∆Ppump = ρ · ∆Hpump , puesto que en una bomba la curva H versus V · A es indepen-diente de la densidad si la viscosidad se mantiene constante.
Consideremos ahora que aproximadamente:
V ' Win + Wout
2 · ρ · A
A partir de aquı, utilizando Vo u t =Wout
A out · ρout y Vi n =Win
A in · ρ in , y dividiendo por A , la ecuacion´ ( 1 7)
queda finalmente:
L2 · A ·
d(Win + Wout)d t
+1A·(
Wout2
Aout · ρout− Win
2
Ai n · ρi n
)+ ρ · g · ( zout − zin)
= pin − pout + ∆Ppump− ∆Pf
Conservacion´ de la energıa´
(ho u t +
Vo u t2
2+ g · zou t
)· Wo u t −
(h i n +
Vi n2
2+ g · zi n
)· Wi n + A · L ·
d(ρ · h − p+
ρ · V 2
2
)
d t= Q + ∆Ppump · V · A
No se ha considerado la disipacion´ de energıa´ por viscosidad, ( que incluirıa´ al termino´∆Pf ) pues consideramos que no escapa calor al ambiente sino que queda en el fluıdo´ ,ademas´ de ser un termino´ de importancia menor en la ecuacion´ .
Pablo Martın´ Gagliardi
8

Factores de friccion´
Friccion´ distribuıda´ : la ecuacion´ ( 1 8) contiene el coeficiente de friccion´ f, que dependesolamente del numero´ de Reynolds (R eD ) y de la rugosidad relativa de las paredes delconducto (
ε
D) , cumpliendo la relacion´ [ White] :
1
f√ = − 2 · log
(ε/D3 , 7
+2 , 51
R eD · f√
)
en caso de que el flujo sea turbulento; mientras que, si es laminar, :
f =64R eD
Expresamos al numero´ de Reynolds: R eD =W · Dµ · A , y recordamos que se considera flujo
turbulento si R eD > 4000, laminar si R eD < 2290, y de transicion´ si se encuentra entreestos dos valores, aproximadamente.
Friccion´ concentrada: puede deberse a codos, expansiones, contracciones y otras carac-terısticas´ geometricas´ del conducto. Se utiliza el coeficiente Kc de la ecuacion´ ( 1 8) .Como los cambios de area´ entre conductos son bruscos, utilizamos las siguientes rela-ciones:
Contraccion´ : Kc = 0 , 42 ·(
1 − A
Ai n
)A < Ai n
Expansion´ : Kc =(
1 − Ai nA
) 2A > Ai n
Nota: Este Kc se utiliza en la ecuacion´ ( 1 8) con la densidad y la velocidad del cano˜mas´ angosto, de manera que si es una contraccion´ seran´ los valores aguas abajo de lamisma, mientras que si es una expansion´ seran´ los valores aguas arriba.
Implementacion´
Se utiliza un modelo de parametros´ concentrados ( ver Fig. 4) , en el cual tenemos uncoeficiente de friccion´ Kfi a la entrada, otro Kfo a la salida, y un volumen de control enel centro, a presion´ p, entalpıa´ especıfica´ h y densidad ρ . El coeficiente Kfi contempla laperdida´ de carga por friccion´ distribuıda´ en la primera mitad del cano˜ , la perdida´ decarga por friccion´ concentrada, y el termino´ de aceleracion´ por cambio de area´ . El coefi-ciente Kfo contempla la perdida´ de carga por friccion´ distribuıda´ en la segunda mitad delcano˜ .
Se considera como area´ de salida Aout al area´ del conducto A , y como area´ de entradaA in la del componente inmediatamente anterior; ver Fig. 5 . Como antes mencionamos, sehan confeccionado dos implementaciones del modelo, una a utilizarse cuando el agua seencuentra en estado lıquido´ , y otra para cuando se encuentra en dos fases. La razon´ deesto es la diferencia en las propiedades del agua entre los distintos casos. Una de lascaracterısticas´ de los lıquidos´ es que son poco compresibles, y en lo que respecta a estetrabajo, significa que si la presion´ cambia de un instante a otro, la densidad del fluıdo´permanecera practicamente´ invariable, y este hecho se tiene en cuenta en la formulacion´de las ecuaciones. En dos fases la influencia de la presion´ sobre la densidad es impor-tante, y se hace necesario trabajar con otro planteo del problema. En ambos casos seconsidera que no existe ninguna fuerza impulsora tal como una bomba, con lo que el ter-´mino ∆Ppump es igual a cero, y se omitira de aquı en adelante.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
9

Pout
Wout
Pin
Win
P, hK K
fofi
Figura 4. Modelo utilizado.
Ain Aout
Pin Pout
Win Wout
Figura 5 . Seccion´ de canerıa˜ ´ . Areas y presiones.
Implementacion´ para agua lıquida´
A partir de la ecuacion´ ( 1 8) , y dejando de lado los terminos´ de energıa´ cinetica´ ( los quecontienen V2 ) y los de diferencias de altura ( zout y zin) , obtenemos la siguiente expresion´ :
A · L · d( ρ · h − p)d t
= h in · Win − hout · Wout + Q
Que bien podemos expresarla:
A · L ·(dρd t· h +
d hd t· ρ − d p
d t
)= h in · Win − hout · Wout + Q
Y utilizando ( 1 7) , al tiempo que despreciamosd p
d tfrente a los demas´ terminos´ :
A · L · ρ · d hd t
+ (Win − Wout) · h = h in · Win − hout · Wout + Q
Que operando queda:
A · L · ρ · d hd t
= ( h in − h ) · Win + ( h − hout) · Wout + Q ( 1 9)
Pablo Martın´ Gagliardi
1 0

Esto en forma discreta, bajo un esquema Backward Euler, con las variables de estadoactualizadas al instante k , y la entalpıa´ de entrada del instante siguiente ( k + 1 ) , loexpresamos:
hk+ 1 − hkTs
=1
A · L · ρ ·[( h ink+ 1 − hk ) · Win
k + ( hk − houtk ) · Woutk + Qk
]( 20)
Donde Ts es el paso de tiempo que utilizamos en el modelo. De aquı se despeja inmedia-tamente hk+ 1 , con la cual calculamos la densidad.
Vale la pena aclarar que se considera como entalpıa´ de salida a la media del cano˜ ( h ) ,y lo mismo vale para la densidad y cualquier otra propiedad del agua. En estas ecua-ciones suponemos a los caudales positivos, es decir que por ejemplo Wout efectivamentees saliente; en cambio en la implementacion´ estos pueden tomar valores negativos, y ental caso Wout serıa´ entrante, y la entalpıa´ saliente serıa´ h in en lugar de hout .
Pasamos entonces a la ecuacion´ de momento ( 1 8) , expresada:
L
2 · A ·dWi n
d t+Wi n
2
A · ρ ·(
1
Ao u t− 1
Ai n
)+ 0 , 5 · ρ · g · ( zou t − zi n ) = pi n − p− ∆Pfi
L
2 · A ·dWou t
d t+ 0 , 5 · ρ · g · ( zo u t − zi n ) = p− po u t − ∆Pfo ( 21 )
S i las sumamos podemos expresar, ahora en forma discreta, una vez mas´ bajo unesquema Backward Euler:
L
2 · A ·(Wi n
k+ 1 + Wo u tk+ 1 − Wi n
k − Wou tk )
Ts+Wi n
k 2
A · ρ ·(
1
Ao u t− 1
A i n
)+ ρ · g · ( zou t − zi n )
= pi nk+ 1 − pou tk+ 1 − ∆Pf
La razon´ por la cual utilizamos solamente Win en el termino´ de aceleracion´ y no Wout esque la aproximacion´ Wi n ' Wout = W , que podemos realizar gracias a que los cambios enla densidad son muy pequenos˜ en estado lıquido´ , nos permite utilizar cualquiera de losdos. Notese´ que tambien´ aproximamos ρin' ρout = ρ . Definiremos ahora:
Kfia =1A·(
1Aout
− 1Ain
)
Expresemos el termino´ ∆Pf = ∆Pfi + ∆Pfo en funcion´ de los caudales, basados nuevamente en
Wi n 'Wou t = W .
Friccion´ distribuıda´ :
∆Pfd =f · ρ · V2 · L
2D=f · ρ · L2 · D ·
(Wρ · A
) 2
=f · L
2 · D · ρ · A2· W2
Hagamos:
∆Pfd =Kfid · Win
2
ρ+Kfod · Wout
2
ρ
No es difıcil´ demostrar que los coeficientes Kfd son iguales entre sı , valiendo:
Kfid = Kfod =f · L
4 · D · A2
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
1 1

Friccion´ concentrada:
Kc · ρ · V2
2=Kc · ρ
2·(Wρ · A
) 2
=Kc
2 · ρ · A2· W2
Esta perdida´ de carga concentrada la suponemos en la region´ de entrada, donde seencuentra el cambio de seccion´ , siendo A el area´ del cano˜ actual si es una contraccion´(A < Ain) , y reemplazandola´ por el area´ del componente anterior (Ain) si es una expan-sion´ (A > Ain) .
Definimos entonces el coeficiente:
Kfc =Kc
2 · A2
Para expresar la perdida´ de carga por friccion´ concentrada:
∆Pfc =Kfc · Wi n
2
ρ
Ahora la ecuacion´ ( 21 ) puede ser expresada:
L
2 · A ·(Wi n
k+ 1 + Wou tk+ 1 − Wi n
k − Wou tk )
Ts+Kfi a
ρ· Wi n
k 2 + ρ · g · ( zo u t − zi n )
= pi nk+ 1 − po u tk+ 1 − (Kfi d + Kfc)
ρ· Wi n
k 2 − Kfo d
ρ· Wo u t
k 2
Despejando:
L
2 · A ·(Wi n
k+ 1 + Wou tk+ 1 − Wi n
k − Wou tk )
Ts+ ρ · g · ( zo u t − zi n )
= pi nk+ 1 − pou tk+ 1 − (Kfi d + Kfc + Kfi a )
ρ· Wi n
k 2 − Kfo d
ρ· Wo u t
k 2
Queda entonces llamar Kfi = Kfi d + Kfc + Kfi a ; Kfo = Kfo d para finalmente expresar:
L2 · A ·
(Wink+ 1 + Wout
k+ 1 − Wink − Wout
k )Ts
+ ρ · g · ( zout − zin)
= pi nk+ 1 − poutk+ 1 − Kfi
ρ· Win
k 2 − Kfo
ρ· Wout
k 2
Por otra parte, la conservacion´ de la masa:
ρk+ 1 − ρkTs
· A · L = Wi nk+ 1 − Wout
k+ 1
nos brinda, junto con ( 21 ) , las dos ecuaciones necesarias para encontrar ambos caudalesen el instante k + 1 , a traves´ de un sistema de 2 × 2 . Notese´ que como valor de ρk+ 1 se
ha utilizado aquel´ calculado a partir de hk+ 1 y pk ; lo ideal serıa´ haberlo hecho con pk+ 1 ,porque las demas´ variables se calculan en dicho paso de tiempo, pero sabemos que serauna muy buena aproximacion´ , a raız´ , nuevamente, de la incompresibilidad del lıquido´ .
Pablo Martın´ Gagliardi
1 2

Queda ahora simplemente calcular la presion´ media del cano˜ , para lo cual utilizamos:
p= pin −Kfi
ρ· Win
2 − L2 · A ·
Wi nk+ 1 − Win
k
Ts
Nota: Indistintamente podrıamos´ haber escogido Wout y pout para el calculo´ de p.
Implementacion´ para dos fases
Como el modelo es el mismo que para el caso de una fase, las ecuaciones utilizadas sonlas que vimos en aquel´ , solo´ cambiara la forma de despejar los terminos´ .
Comenzamos aplicando la ecuacion´ de energıa´ tal como se describe en ( 20) . Una vezhallado hk+ 1 se actualiza la densidad y se procede al calculo´ de los caudales, a partir dela ecuacion´ de momento, utilizandola´ para ambos conductos, tal como en ( 21 ) , solo´ queen forma discreta:
L2 · A ·
Wink+ 1 − Win
k
Ts+ 0 , 5 · ρ · g · ( zout − zin) = pin
k+ 1 − pk − Kfi
ρin· Win
k 2 ( 22 )
L2 · A ·
Woutk+ 1 − Wout
k
Ts+ 0 , 5 · ρ · g · ( zout − zin) = pk − poutk+ 1 − Kfo
ρ· Wout
k 2 ( 23)
Los coeficientes tienen la misma forma que en el caso de una sola fase:
Kfi =f · L
4 · D · A2+
Kc
2 · A2+
1A·(
1Aout
− 1Ain
)
Kfo =f · L
4 · D · A2
Para calcular la presion´ expresaremos la conservacion´ de la masa de la siguiente forma:
∂ρ∂p· d pd t
+∂ρ∂h· d hd t
=Win − Wout
A · L ( 24)
Y despejamos:
d pd t
=
[(Win − Wout)
A · L − ∂ρ∂h· d hd t
]· 1∂ρ/∂p
Al termino´∂ρ
∂h· d hd t
lo conocemos, pues calculamos ρ( hk+ 1 , pk ) ( llamemoslo´ ρ∗ ) y tenıamos´
ρk = ρ( hk , pk ) , con lo que, en forma discreta:
∂ρ∂h· d hd t' ρ∗ − ρkTs
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
1 3
Finalmente:
pk+ 1 − pkTs
=
[(Win
k+ 1 − Woutk+ 1 )
A · L +ρk − ρ∗Ts
]· 1∂ρ/∂p
( 25 )
De esta ultima´ ecuacion´ , ya con los valores de Wink+ 1 y Wout
k+ 1 , obtenemos de forma inme-diata pk+ 1 .
Transicion´ entre una implementacion´ y otra
Como antes mencionamos, el grado de compresibilidad del fluıdo´ es la caracterıstica´ quedeterminara el buen funcionamiento de uno u otro modelo. El indicador de tal propiedades el termino´ ∂ρ/∂p, que cuanto mayor es, mas´ compresible es el fluıdo´ . En el caso de laimplementacion´ para dos fases, basta con observar la ecuacion´ ( 25 ) , donde el termino´∂ρ/∂p esta dividiendo; si este´ es lo suficientemente grande, los cambios de presion´ atraves´ del tiempo seran´ leves y el modelo evolucionara suavemente, cosa que queremos.
El modelo de una fase, en cambio, se basa en la premisa de que, entre el calculo´ de loscaudales y el calculo´ de la presion´ , la densidad mantuvo un valor practicamente´ cons-tante, con lo cual su validez esta ligada a que ∂ρ/∂p permanezca lo suficientementepequeno˜ .
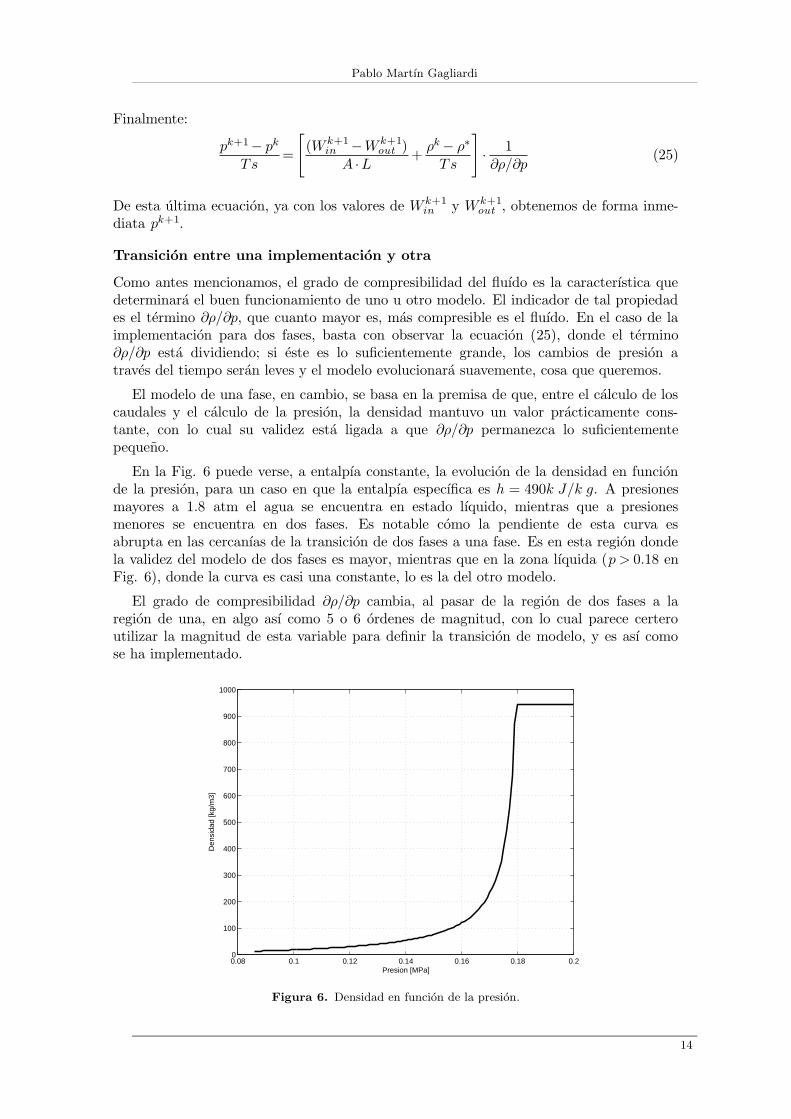
En la Fig. 6 puede verse, a entalpıa´ constante, la evolucion´ de la densidad en funcion´de la presion´ , para un caso en que la entalpıa´ especıfica´ es h = 490k J/k g . A presionesmayores a 1 . 8 atm el agua se encuentra en estado lıquido´ , mientras que a presionesmenores se encuentra en dos fases. Es notable como´ la pendiente de esta curva esabrupta en las cercanıas´ de la transicion´ de dos fases a una fase. Es en esta region´ dondela validez del modelo de dos fases es mayor, mientras que en la zona lıquida´ ( p > 0. 1 8 enFig. 6) , donde la curva es casi una constante, lo es la del otro modelo.
El grado de compresibilidad ∂ρ/∂p cambia, al pasar de la region´ de dos fases a laregion´ de una, en algo ası como 5 o 6 ordenes´ de magnitud, con lo cual parece certeroutilizar la magnitud de esta variable para definir la transicion´ de modelo, y es ası comose ha implementado.
0.08 0.1 0.12 0.14 0.16 0.18 0.20
100
200
300
400
500
600
700
800
900
1000
Presion [MPa]
Den
sida
d [k
g/m
3]
Figura 6 . Densidad en funcion´ de la presion´ .
Pablo Martın´ Gagliardi
1 4

Analisis´ de estabilidad
Este sistema tiene como variables de estado la entalpıa´ h , la presion´ p, y los caudalesWin y Wout , mientras que las entradas externas del mismo son las presiones en losextremos pi n y pout , la entalpıa´ de entrada h in y el calor Q . Definiendo un vectorcolumna x
�
= ( h ; p; Win ; Wout) , y otro u�
= ( pi n ; pout ; h in ; Q ) , y si podemos expresar:
x� ˙ = f (x
�
, u�
)
Definimos:
δx = x� − x� 0
δu = u� − u� 0
Donde x�
0 y u�
0 surgen de un estado de equilibrio, y δx y δu son perturbaciones lo sufi-cientemente pequenas˜ . Cumpliendo todas estas condiciones, se puede escribir:
M · δx˙ = A · δx + B · δu ( 26)
Donde δx˙
es un vector columna que contiene las derivadas temporales de la perturbacion´δx , y M , A y B son matrices, en este caso de 4 × 4. Para verificar la estabilidad del sis-tema analizaremos los autovalores de la matriz M− 1 · A , que nos informaran´ si el sistemaes asintoticamente´ estable; esto es, que cualquier perturbacion´ de alguna de sus variablesde estado lleva, a tiempos lo suficientemente grandes, al estado del sistema a su posicion´de equilibrio x
�
0 .
S e parte entonces de las ecuaciones ( 1 9) , ( 24) , y las dos ( 23) , estas ultimas´ en suforma continua, no discreta. Utilizaremos como notacion´ :
h =d h
d tp =
d p
d t
Wi n˙ =
d Win
d tWo u t
˙ =d Wout
d t
En ( 1 9) hacemos ( h − hout) · Wout = 0, puesto que la entalpıa´ de salida hout es igual ala entalpıa´ media h . Perturbaremos las variables de estado y las entradas externas a finde analizar como´ cambia la derivada del sistema; queda algo de la forma:
δh =1
A · L · ρ · [ ( h i n − h ) 0 · δWin + ( δh in − δh ) · Win 0 + δQ ]
Con ( 24) queda:(∂ρ∂h
)
0
· δh +
(∂ρ∂p
)
0
· δp=δWin − δWout
A · L
Y ası con ( 23) , en donde hemos hecho zout = zi n para simplificar las ecuaciones:
L2 · A · δWin
˙ = δpi n − δp −(
2 · Kfi · Win
ρin
)
0
· δWin −(∂(Kfi · νi n)
∂h in· δh in +
∂(Kfi · νin)∂pin
·
δpin
)· Win 0
2
L
2 · A · δWou t˙ = δp− δpo u t −
(2 · Kfo · Wou t
ρ
)
0
· δWou t −(∂(Kfo · ν )
∂h· δh +
∂(Kfo · ν )
∂p· δp)· Wou t 0
2
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
1 5

Los subındices´ ’ 0’ significan que los terminos´ corresponden al estado de equilibrio inicial;de aquı en mas´ los omitiremos. Llegamos entonces a que las matrices y los vectores sonde la siguiente manera:
M =
1 0 0 0∂ρ∂h
∂ρ∂p
0 0
0 0L
2 · A 0
0 0 0L
2 · A
δx˙
=
δhδp
δWin˙
δWout˙
δx =
δhδpδWin
δWout
A =
− Win
A · L · ρ 0h in − hA · L · ρ 0
0 01
A · L − 1A · L
0 − 1 − 2 · Kfi · Win
ρin0
− ∂(Kfo · ν )
∂h· Wout
2 1 − ∂(Kfo · ν )
∂p· Wout
2 0 − 2 · Kfo · Wout
ρ
B =
0 0Win
A · L · ρ1
A · L · ρ0 0 0 0
1 − ∂(Kfi · νin)∂pin
· Win2 0 − ∂(Kfi · νin)
∂h i n· Win
2 0
0 − 1 0 0
δu =
δpinδpoutδh inδQ
Una vez que tenemos M y A podemos analizar si el sistema es estable bajo un tiempo demuestreo T s determinado. Como trabajamos con un esquema Backward Euler, la ecua-cion´ ( 26) discreta quedarıa´ :
M · ( δxk+ 1 − δx k )Ts
= A · δx k + B · δu k
S in considerar el ultimo´ termino´ , y despejando, llegamos a:
δx k+ 1 − δx k = Ts · M− 1 · A · δx k
δx k+ 1 = ( I + Ts · M− 1 · A) · δx k
Donde I es la matriz identidad. Pedimos ahora que los autovalores de ( I + Ts · M− 1 · A)tengan un modulo´ menor que 1 para asegurar la estabilidad, y notamos que la matriz
Pablo Martın´ Gagliardi
1 6

depende de T s , de manera que cuanto mas´ pequeno˜ sea este, mas´ se aproximan el sis-tema continuo y el discreto.
Nota: S i estuvieramos´ trabajando con un sistema continuo deberıamos´ estudiar losautovalores de M− 1 · A para definir la estabilidad del mismo.
Al aplicar estos criterios que acabamos de explicar, nos encontramos con los siguienteshechos:
• Cuando el agua se encontraba en estado lıquido´ , necesitabamos´ que T s sea muypequeno˜ ( del orden de 1 0− 5 ) para que el sistema sea estable.
• Cuando el tıtulo´ de vapor era muy bajo era cuando mas´ estable se encontraba elsistema, ya que funcionaba incluso para Ts del orden de la unidad.
• A medida que aumentaba el tıtulo´ necesitabamos´ menores Ts para lograr la esta-bilidad, si bien no llegaban a valores tan pequenos˜ como en el caso lıquido´ .
No es casualidad que las zonas de mayor estabilidad coincidan con las de mayores∂ρ
∂p,
pues como antes dijimos es entonces cuando mejor se comporta la implementacion´ parados fases. Sus autovalores continuos no tienen constantes de tiempo tan rapidas´ , y conBackward Euler se puede resolver el sistema de ecuaciones completo para valores de T srazonables para un componente de biblioteca.
En cambio en una fase los autovalores continuos son muy rapidos´ , con lo que se nece-sitan valores de Ts prohibitivamente pequenos˜ para aplicar Backward Euler y que el sis-tema sea estable. Esto motivo la implementacion´ del esquema de una fase, que practica-´mente descarta al termino´ ∂ρ/∂p por ser demasiado chico, y hace que la densidaddependa explıcitamente´ solo´ de la entalpıa´ ( ρ = ρ( h ) ) , si bien depende tambien´ de la pre-sion´ en forma implıcita´ .
Evaluacion´ del modelo
Una vez completo el modelo debemos probarlo en diferentes situaciones, e incluso com-pararlo con resultados que sabemos correctos, a fin de asegurar el buen funcionamientodel mismo. Se ha confeccionado entonces un modelo continuo que a partir de herra-mientas de MATLAB para la resolucion´ de Ecuaciones Diferenciales Ordinarias, resuelveel conjunto completo de ecuaciones del cano˜ , y contra el cual comparamos el actualmodelo discreto.
Los siguientes tests fueron realizados para corroborar que nuestro modelo discreto res-ponda a las distintas exigencias. La longitud de la seccion´ de canerıa˜ ´ era L = 30m , elarea A = 0. 1 m2 , al igual que el area de entrada, y una rugosidad relativa ε/D = 0. 001 . Eltiempo de muestreo utilizado fue Ts = 0. 05s . Partıamos´ del estado estacionario, con unapresion´ de 0. 1 1 MPa a la entrada y 0. 1 MPa a la salida.
• Test 1 . Con un caudal de estado estacionario de aproximadamente 340 kg/s , ent=0 aplicamos un escalon´ de presion´ a la entrada de 0. 01 MPa. El agua entra enestado lıquido´ a unos 97oC , y sale en el mismo estado. La entalpıa´ se mantieneconstante.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
1 7
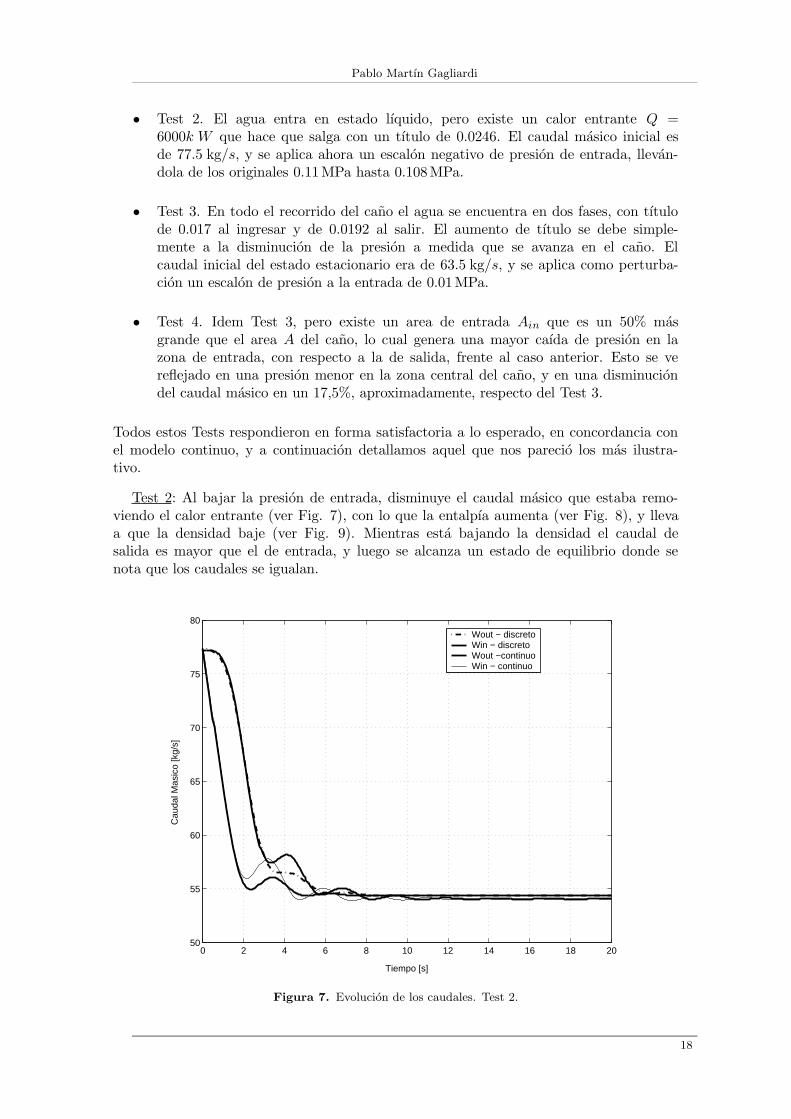
• Test 2 . El agua entra en estado lıquido´ , pero existe un calor entrante Q =6000k W que hace que salga con un tıtulo´ de 0. 0246 . El caudal masico´ inicial esde 77. 5 kg/s , y se aplica ahora un escalon´ negativo de presion´ de entrada, llevan-´dola de los originales 0. 1 1 MPa hasta 0. 1 08 MPa.
• Test 3. En todo el recorrido del cano˜ el agua se encuentra en dos fases, con tıtulo´de 0. 01 7 al ingresar y de 0. 01 92 al salir. El aumento de tıtulo´ se debe simple-mente a la disminucion´ de la presion´ a medida que se avanza en el cano˜ . Elcaudal inicial del estado estacionario era de 63. 5 kg/s , y se aplica como perturba-cion´ un escalon´ de presion´ a la entrada de 0. 01 MPa.
• Test 4. Idem Test 3, pero existe un area de entrada Ain que es un 50% mas´grande que el area A del cano˜ , lo cual genera una mayor caıda´ de presion´ en lazona de entrada, con respecto a la de salida, frente al caso anterior. Esto se vereflejado en una presion´ menor en la zona central del cano˜ , y en una disminucion´del caudal masico´ en un 1 7, 5% , aproximadamente, respecto del Test 3 .
Todos estos Tests respondieron en forma satisfactoria a lo esperado, en concordancia conel modelo continuo, y a continuacion´ detallamos aquel que nos parecio los mas´ ilustra-tivo.
Test 2 : Al bajar la presion´ de entrada, disminuye el caudal masico´ que estaba remo-viendo el calor entrante ( ver Fig. 7) , con lo que la entalpıa´ aumenta ( ver Fig. 8) , y llevaa que la densidad baje ( ver Fig. 9) . Mientras esta bajando la densidad el caudal desalida es mayor que el de entrada, y luego se alcanza un estado de equilibrio donde senota que los caudales se igualan.
0 2 4 6 8 10 12 14 16 18 2050
55
60
65
70
75
80
Tiempo [s]
Cau
dal M
asic
o [k
g/s]
Wout − discretoWin − discretoWout −continuoWin − continuo
Figura 7. Evolucion´ de los caudales. Test 2 .
Pablo Martın´ Gagliardi
1 8

0 2 4 6 8 10 12 14 16 18 20480
485
490
495
500
505
510
515
520
Tiempo [s]
Ent
alpi
a [k
J/kg
]
discretocontinuo
Figura 8. Evolucion´ de la entalpıa´ . Test 2 .
0 2 4 6 8 10 12 14 16 18 2014
16
18
20
22
24
26
Tiempo [s]
Den
sida
d [k
g/m
3]
discreto
Figura 9 . Evolucion´ de la densidad. Test 2 .
Se realizo un Test mas´ , que no pudo verificarse con el modelo continuo, debido proba-blemente a que la transicion´ de dos fases a una fase lıquida´ presenta una discontinuidad
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
1 9

en ∂ρ/∂p, y al estar este calculado en forma numerica´ impide la convergencia de los algo-ritmos de integracion´ utilizados. Nuestro modelo discreto sı arro jo resultados, pero al noestar validados y con evoluciones bruscas en las variables de estado creemos necesariorealizar mayores pruebas para analizar la validez de los modelos en estas condicionesoperativas.
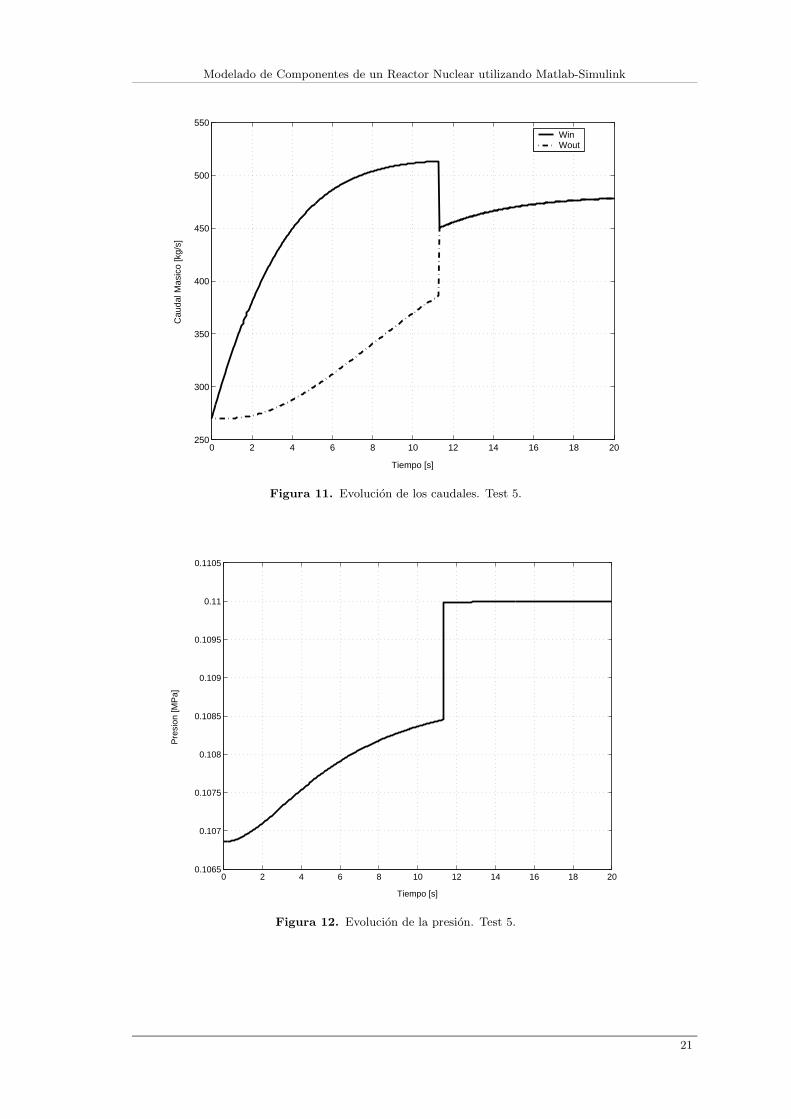
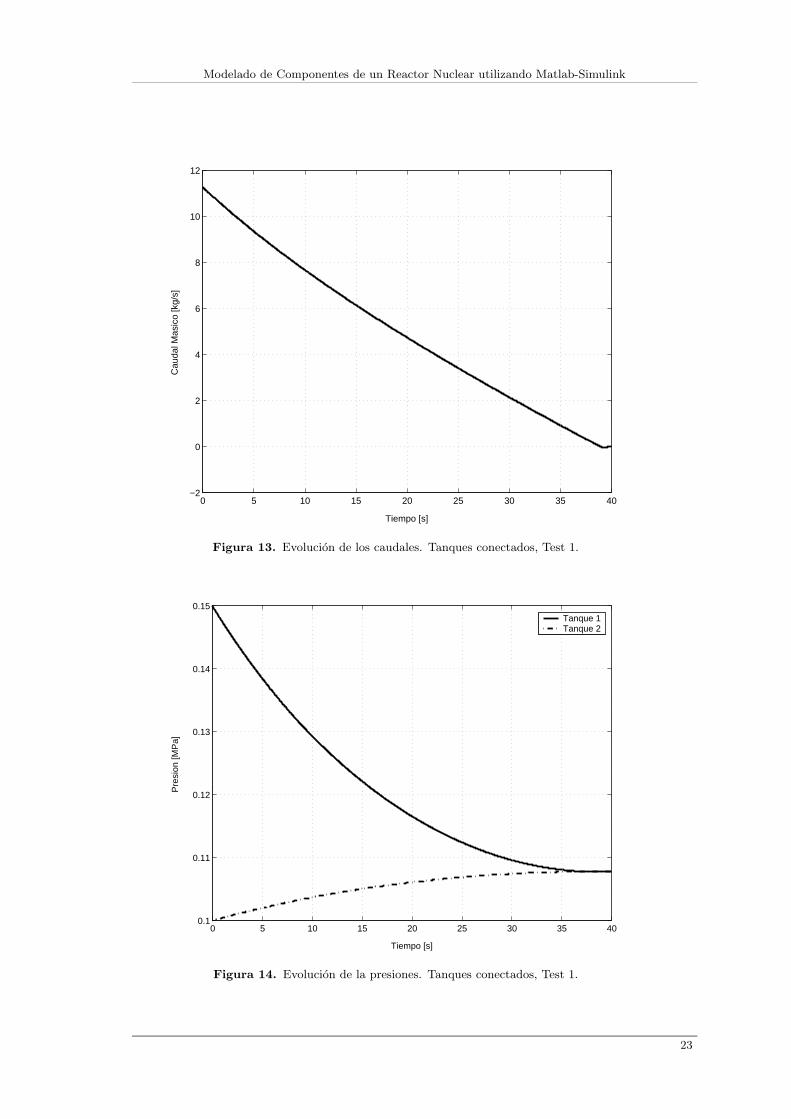
• Test 5 . El agua entra en estado lıquido´ , a unos 1 01 . 9oC , cerca de la saturacion´ ala presion´ de entrada ( 1 02 . 3oC) , y sale con un tıtulo´ cercano a 7. 76 · 1 0− 4 . S eaplica como perturbacion´ un escalon´ de presion´ a la entrada de 0. 01 MPa; laentalpıa´ se mantiene constante a lo largo de todo el proceso. El caudal del estadoestacionario inicial es de 270 kg/ s .
Resultados: El aumento de presion´ que generamos en la entrada del cano˜ aumenta lapresion´ media, lo cual lleva a una disminucion´ del tıtulo´ del agua, con el consiguienteincremento en la densidad ( ver Fig. 1 0) ; esto ultimo´ lleva a que el caudal de entrada seamayor que el de salida ( ver Fig. 1 1 ) y por consiguiente la caıda´ de presion´ ( ver Fig. 1 2 ) .Esta situacion´ persiste hasta que el agua deja de tener dos fases para pasar a un flujomonofasico´ ; entonces se igualan los caudales y las perdidas´ de presion´ , y si observamos elgrafico´ de la presion´ veremos que ahora es exactamente el promedio entre la de entrada( 0. 1 2 MPa) y la de salida ( 0 . 1 MPa) . Este resultado, si bien es el esperado en el sentidode que cuando se pasa de dos fases a una se cambia de implementacion´ , remarcamos queno es fiable considerarlo acorde a la realidad, debido a los repentinos cambios de presion´y caudal que pueden observarse en los graficos´ . Queda entonces solamente´ por decir queescapa del alcance de nuestro modelo discreto, dejando a futuras implementaciones lacuestion´ de como´ resolverlo.
0 2 4 6 8 10 12 14 16 18 20400
500
600
700
800
900
1000
Tiempo [s]
Den
sida
d [k
g/m
3]
Figura 1 0 . Evolucion´ de la densidad. Test 5 .
Pablo Martın´ Gagliardi
20
0 2 4 6 8 10 12 14 16 18 20250
300
350
400
450
500
550
Tiempo [s]
Cau
dal M
asic
o [k
g/s]
WinWout
Figura 1 1 . Evolucion´ de los caudales. Test 5 .
0 2 4 6 8 10 12 14 16 18 200.1065
0.107
0.1075
0.108
0.1085
0.109
0.1095
0.11
0.1105
Tiempo [s]
Pre
sion
[MP
a]
Figura 1 2 . Evolucion´ de la presion´ . Test 5 .
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
21

CAPITULO´ III
Modelo de tanque y de canerıa˜ ´ en conjunto
Una vez probados los dos componentes de librerıa´ , los hemos interconectado paraobservar su comportamiento. Se han tomado entonces dos tanques con agua en satura-cion´ ; el primero de ellos con un volumen de 1 00m3 y una masa de agua de 1 0000 kg, auna presion´ de 0. 1 5 MPa, y el segundo con un volumen de 500m3 , 50000 kg de masa deagua y 0. 1 MPa de presion´ . S e los ha conectado por intermedio de una seccion´ de canerıa˜ ´de 20m de longitud y 0. 05m2 de area, con una rugosidad relativa ε/D = 0. 001 . A lamisma entra vapor de agua del primer tanque ( al que llamaremos Tanque 1 ) , y dado quesu presion´ es mayor que la del otro ( el Tanque 2 ) el sentido de circulacion´ sera desde elTanque 1 hacia el Tanque 2 .
En la Fig. 1 3 vemos como´ evoluciona el caudal a traves´ del tiempo, disminuyendoconforme lo hace la diferencia de presiones entre tanques. Los caudales a la salida y a laentrada del cano˜ son iguales, denotando que no hay importantes cambios en la densidaddel vapor dentro del mismo. En la Fig. 1 4 se muestran las presiones, que se van acer-cando entre sı hasta que finalmente se igualan, y por ultimo´ las temperaturas, en la Fig.1 5 , describen la misma curva que las presiones, como cabıa´ de esperar, puesto que sonlas temperaturas de saturacion´ a la presion´ de cada tanque.
El desplazamiento de masa desde un tanque al otro fue de solamente´ 200 kg, contralos 1 0000 o 50000 que habıa´ en cada tanque, de manera que los niveles de lıquido´ apenascambiaron. Este fue denominado Test 1 .
22
0 5 10 15 20 25 30 35 40−2
0
2
4
6
8
10
12
Tiempo [s]
Cau
dal M
asic
o [k
g/s]
Figura 1 3. Evolucion´ de los caudales. Tanques conectados, Test 1 .
0 5 10 15 20 25 30 35 400.1
0.11
0.12
0.13
0.14
0.15
Tiempo [s]
Pre
sion
[MP
a]
Tanque 1Tanque 2
Figura 1 4. Evolucion´ de la presiones. Tanques conectados, Test 1 .
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
23

0 5 10 15 20 25 30 35 4098
100
102
104
106
108
110
112
Tiempo [s]
Tem
pera
tura
[C]
Tanque 1Tanque 2
Figura 1 5 . Evolucion´ de las temperaturas. Tanques conectados, Test 1 .
Finalmente realizamos una segunda prueba, Test 2 , con las mismas condiciones que elTest 1 , pero la sola excepcion´ de que en lugar de circular vapor entre los tanques, laentrada del cano˜ se conecta a la zona del Tanque 1 que contiene lıquido´ en saturacion´ .Al llegar al Tanque 2 tiene un tıtulo´ de aproximadamente 0. 0031 . Vemos los resultadosen las Figs. 1 6 , 1 7 y 1 8. Notemos las diferencias con el caso anterior: el caudal masico´ deagua circulando por el cano˜ es mucho mayor que si circulara vapor puro; esto es comun´que ocurra, debido a la mayor densidad del lıquido´ ( aunque este en dos fases, hay muchaagua lıquida´ ) . Consecuencia de esta gran cantidad de agua saliendo del Tanque 1 es quela masa contenida en el mismo descendio a un 1 0% de la cantidad original, en el mismolapso de tiempo que en el Test anterior apenas si bajo. En contraste con toda esta masaperdida por el Tanque 1 en ese perıodo´ de tiempo, la presion´ apenas descendio un 2 , 7%aproximadamente, mientras que en el Test 1 llego a igualarse a la del Tanque 2 , bajandomas´ de un 30% en el mismo lapso.
Estos Tests muestran la conveniencia de despresurizar un tanque liberando vapor, encontraste con la liberacion´ de agua, que lo que hace es perder masa en lugar de perderpresion´ .
Las caracterısticas´ del Tanque 2 no fueron graficadas puesto que no eran relevantes en
Pablo Martın´ Gagliardi
24

esta comparacion´ .
0 5 10 15 20 25 30 35 40214
216
218
220
222
224
226
228
230
232
234
Tiempo [s]
Cau
dal M
asic
o [k
g/s]
WoutWin
Figura 1 6 . Evolucion´ de los caudales. Tanques conectados, Test 2 .
0 5 10 15 20 25 30 35 400
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Tiempo [s]
Mas
a T
otal
[kg]
Tanque 1
Figura 1 7. Evolucion´ de la masa total . Tanques conectados, Test 2 .
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
25

0 5 10 15 20 25 30 35 400.146
0.1465
0.147
0.1475
0.148
0.1485
0.149
0.1495
0.15
0.1505
Tiempo [s]
Pre
sion
[MP
a]
Tanque 1
Figura 1 8. Evolucion´ de la presion´ . Tanques conectados, Test 2 .
Pablo Martın´ Gagliardi
26
BIBLIOGRAFIA´
Bibliografıa´
[White] Frank M. White, Fluid Mechanics , McGraw-Hill , 1 979 .
[Wallis ] G. B . Wallis , One-Dimensional Two Phase Flow , McGraw-Hill , 1 969 .
[ GH] Garland & Hand, Simple Functions for the Fast Approximation of Light Water Thermody-namic Propertie s , Nuclear Engineering and Design 1 1 3 , 1 989 .
27

CAPITULO´ IV
Conclusiones
Se ha avanzado en el estudio del modelado de sistemas que contienen agua en una y dosfases, en particular los dos componentes que se han tratado en este trabajo, uno de ellosmuy relacionado con la fenomenologıa´ de flujos bifasicos´ .
Se han probado diferentes formas de encarar la resolucion´ de las ecuaciones de la sec-cion´ de canerıa˜ ´ , algunas con un alcance muy limitado, otras con buenos resultados parauna amplia gama de situaciones. El tanque en saturacion´ responde bien frente a todoslos casos para los cuales ha sido implementado.
De todas formas queda aun´ trabajo por hacer, en el sentido de completar los modelospara conseguir una respuesta adecuada ante condiciones mas´ generales. No puedenentonces darse por finalizadas las librerıas´ , sino que algunos detalles se dejan para tra-bajos posteriores, como ser que el tanque en saturacion´ trabaje con lıquido´ subenfriado ovapor sobresaturado, y que la seccion´ de canerıa˜ ´ pase suavemente de un flujo bifasico´ auna fase cuando las condiciones ası lo impongan.
28

APENDICE´
Tabulado de funciones
A fin de conocer los valores que toman las propiedades del agua tales como densidad yviscosidad en funcion´ de la presion´ y/o la entalpıa´ , pueden utilizarse tablas a tal efecto;incluso en el caso que necesitabamos´ el factor de friccion´ f en funcion´ del numero´ deReynolds se ha recurrido a una tabla.
Es particularmente sencillo programar en MATLAB una busqueda´ de algun´ valor enuna de estas tablas, para lo cual realiza una interpolacion´ , que en nuestro caso seralineal.
Supongamos entonces que tenemos la variable f en funcion´ de Re ; buscamos losvalores de Re tal que f quede bien representada, a la vez de no tomar muchos puntosinnecesarios que hagan mas´ lenta la busqueda´ .
El criterio que hemos utilizado para encontrar los puntos donde tabular a f es elsiguiente:
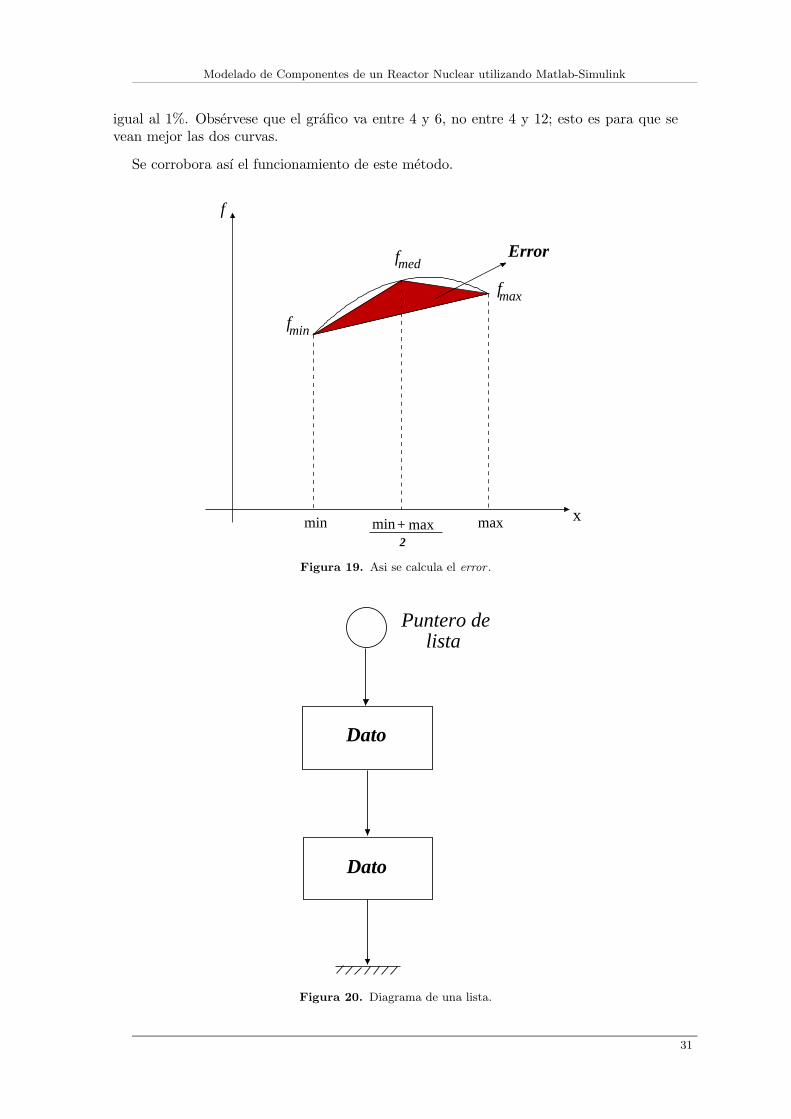
• Dadas dos abscisas, min y max , y los respectivos valores de la funcion´ f en estospuntos: fmax y fmin , procedemos a un calculo´ del area debajo de la recta que uneestos dos ultimos´ puntos ( ver Fig. 1 9 ) , y la llamaremos A1 .
• A continuacion´ , en el punto de abscisa medio (m i n + m a x) / 2 se obtiene fmed =f ( (m i n + m a x) /2 ) , y se calcula el area debajo de la lınea´ que une fmed y fmin ,y por otra parte el area debajo de la lınea´ que une fmax y fmed; las denominamosA2 y A3 , respectivamente.
• Definiendo e r r o r = | A1 − (A2 + A3) | , y sabiendo que este esta directamente rela-cionado con la diferencia maxima´ de valor entre la funcion´ real y la interpolada( no lo demostraremos a fin de no extender demasiado este apendice´ ) , podemosestimar que tan bien estamos aproximando a la funcion´ f . La Fig. 1 9 muestra elarea error de la que estamos hablando.
La funcion´ que realiza todos estos pasos y devuelve el resultado de error cuando se leenvıan´ el puntero a la funcion´ f y los lımites´ de integracion´ , la denominamos int _error ,y mas´ adelante veremos donde´ la utilizamos.
Implementamos entonces en lenguaje C++ un programa que a partir de un completoconjunto de puntos ( Re , f) devuelve unos pocos valores con los cuales se puede tabular fcon la precision´ que necesitemos. Este programa se compone basicamente´ de un objetoFunction al cual se le pasa un puntero a la funcion´ a tabular junto con los lımites´ de lasabscisas ( Re ) , y devuelve por pantalla los valores buscados.
Antes de continuar, haremos una breve referencia de lo que es una lista. Cuandohablemos de listas nos estaremos refiriendo a una secuencia de datos consecutivos, en losque cada uno de estos contiene el valor de interes´ mas´ la direccion´ del dato siguiente.
29

Con un puntero al primer dato tenemos acceso a toda la lista, que puede aumentar o dis-minuir a conveniencia. Un diagrama de lo que estamos hablando lo encontramos en laFig. 20, y damos toda esta explicacion´ puesto que en este apendice´ se hace referencia atales listas.
Ahora iremos mostrando la implementacion´ del programa como si se tratara de dife-rentes capas, comenzando con el main() ( en C , estructura principal) para continuar conlas funciones internas.
• main() lee el archivo donde estan´ todos los puntos ( Re , f) , que deberıan´ sermuchos para una buena descripcion´ de la funcion´ . Los carga en una lista devalores a la cual hara referencia el ob jeto Function .
• Ahora se indica a Function que comience la busqueda´ de los valores de la tabla.
Lo que ejecuta Function una vez que tiene todos los datos que necesita es una funcion´search ; cuyo esquema puede verse en la Fig. 21 , y se describe someramente a continua-cion´ :
• Se divide inicialmente el intervalo total donde se considerara a la funcion´ f ; noimporta cuantas´ divisiones se hagan, no influiran´ en el resultado.
• Se cargan los valores de esta division´ en una lista, denominada ’ max_ list ’ . De estalista posteriormente se agregaran´ o quitaran´ valores a conveniencia.
• Basicamente´ search va tomando valores de ’ max_ list ’ y los envıa´ a otra funcion´f2 . Esta ultima´ requiere dos valores de abscisa, entre los cuales intentara encon-trar el punto donde tabular la funcion´ ; ambos se los envıa´ search ; uno de ellos salede la lista ’ max_ list ’ ( se lo denominara ’ maximo´ ’ ) , y el otro lo devuelve la mismafuncion´ f2 luego de la ultima´ busqueda´ , y se lo llamara ’ mınimo´ ’ .
• La funcion´ f2 utiliza ’ int_error’ para determinar que tan buena es una aproxima-cion´ lineal en el intervalo en cuestion´ . El valor de ’ error’ no solo´ tiene que sermenor a un lımite´ superior, sino que tambien´ le ponemos una cota inferior, de talmanera de no colocar puntos de mas´ en la tabla.
• En la Fig. 22 se muestra un diagrama de flujo de la funcion´ f2 , que pondra enotra lista ’ list ’ los valores de abscisa encontrados para la tabulacion´ de f ; luegodevuelve un valor que search utilizara como mınimo´ de la siguiente busqueda´ .
• No detallaremos la implementacion´ de la funcion´ f3 interna a f2 ya que es muysimilar a esta ultima´ y no queremos extendernos demasiado.
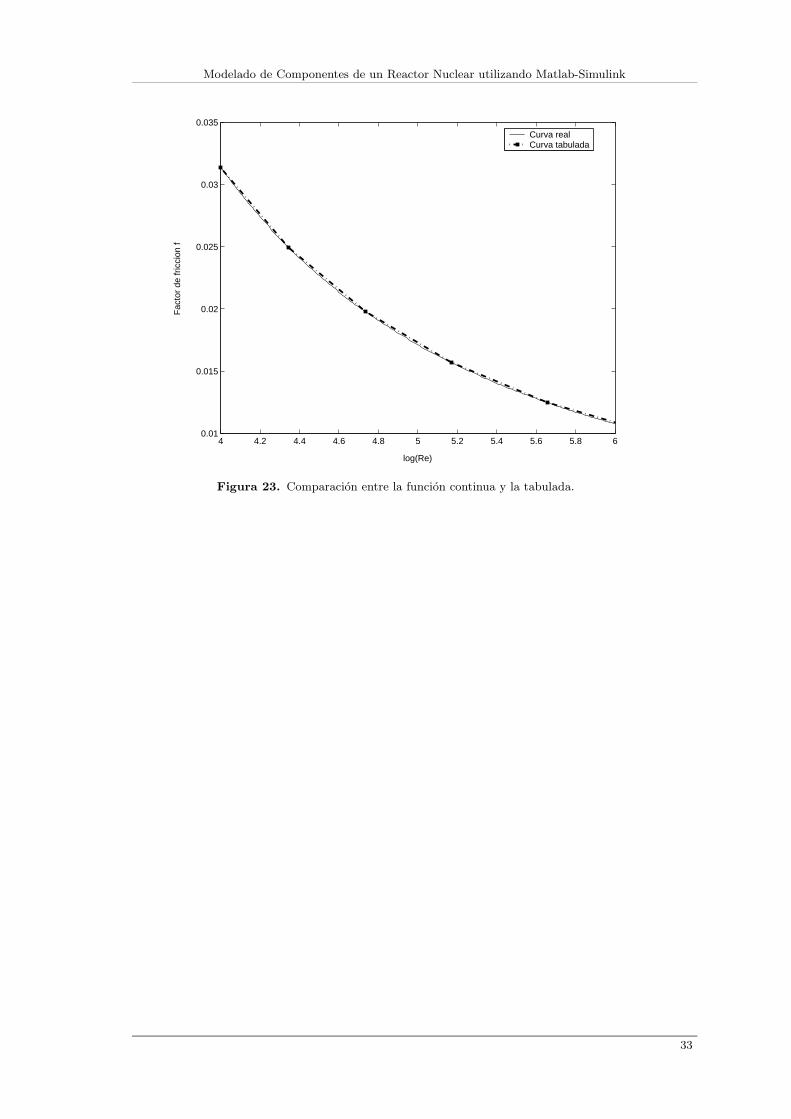
Para finalizar mostramos uno de los resultados del uso de esta funcion´ . En la figura 23vemos al factor de friccion´ en funcion´ del Numero´ de Reynolds. Originalmente tenıamos´aproximadamente 800 puntos entre l o g(R e ) = 4 y l o g(R e) = 1 2 ; una vez aplicado estemetodo´ se ajusto con una tabla de 1 3 componentes, y un error en cada punto menor o
Pablo Martın´ Gagliardi
30
igual al 1 % . Observese´ que el grafico´ va entre 4 y 6 , no entre 4 y 1 2 ; esto es para que sevean mejor las dos curvas.
Se corrobora ası el funcionamiento de este metodo´ .
xmaxmin
Error
+min max2
f
f
f
med
max
fmin
Figura 1 9 . Asi se calcula el error .
Dato
Dato
Puntero delista
Figura 20 . Diagrama de una lista.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
31

Llama a f2 con este
maximo; f2
devuelve
busqueda
Toma el valor minimode la lista
Hay otro maximoen ¨max_list¨?
?
Search()
Finaliza
Si
No
.
.
el minimo de la siguiente
Figura 21 . Esquema de la funcion´ search .
Devuelve elminimo que arrojo
Llama a ,que pondra
el minimo
de la siguiente busqueda.
Lo pone en ¨ list ¨;
minimo de laactual como el
Devuelve el minimoactual, para que
¨ search¨ busque al
Llama a ¨ int_error¨
y devuelve a
en ¨ list ¨ el valor correcto,
?
?
f3
f3
f2
siguiente maximo.
.
siguiente busqueda.
Si
No
Si
No
El error cumple con ambos limites?
El error es menorque el limite inferior?
devuelve al maximo
f2()
Figura 22 . Esquema de la funcion´ f2 .
Pablo Martın´ Gagliardi
32
4 4.2 4.4 4.6 4.8 5 5.2 5.4 5.6 5.8 60.01
0.015
0.02
0.025
0.03
0.035
log(Re)
Fac
tor
de fr
icci
on f
Curva realCurva tabulada
Figura 23. Comparacion´ entre la funcion´ continua y la tabulada.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
33

Diagramacion´ del Proyecto Integrador
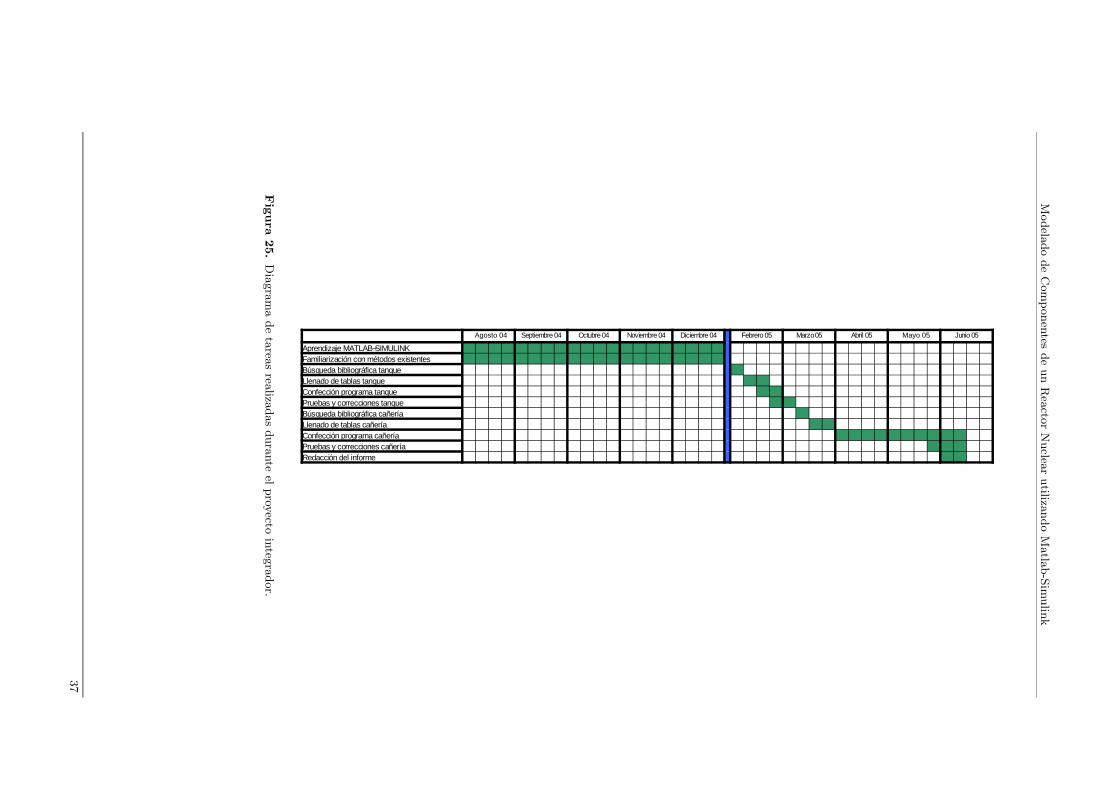
El desarrollo de componentes de biblioteca para la simulacion´ de distintas partes de unreactor nuclear se realizo en 1 1 etapas, a saber:
• Aprendizaje MATLAB-SIMULINK
• Familiarizacion´ con metodos´ existentes
• Busqueda´ bibliografica´ tanque
• Llenado de tablas tanque
• Confeccion´ programa tanque
• Pruebas y correcciones tanque
• Busqueda´ bibliografica´ canerıa˜ ´
• Llenado de tablas canerıa˜ ´
• Confeccion´ programa canerıa˜ ´
• Pruebas y correcciones canerıa˜ ´
• Redaccion´ del informe
A continuacion´ hacemos una breve explicacion´ de cada una de estas:
Aprendizaje MATLAB-SIMULINK
Fue necesario como primer paso interiorizarse en el lenguaje de programacion´ que poste-riormente utilizarıamos´ en la implementacion´ de las librerıas´ . La duracion´ de esta etapase aproxima a los cuatro meses, perıodo´ en el que tambien´ se realizo, en paralelo, laetapa siguiente.
Familiarizacion´ con metodos´ existentes
Puesto que ya habıa´ muchos componentes creados en MATLAB-SIMULINK, algunos delos cuales directamente relacionados con nuestro trabajo futuro, se procedio a conocerlosy estudiarlos, ası adquiriendo uso en el manejo de tales herramientas. La duracion´ deesta etapa es aproximadamente la misma que la anterior, unos cuatro meses.
Busqueda´ bibliografica´ tanque
A fin de confeccionar un tanque de agua en saturacion´ , comenzamos buscando biblio-grafıa´ al respecto, que brindarıa´ la necesaria base para nuestro ulterior trabajo. Dura-cion´ : unos tres dıas´ .
34
Llenado de tablas tanque
Diversas propiedades del agua son indispensables para el funcionamiento de la librerıa´del tanque, con lo cual tuvimos que dedicarnos a la busqueda´ de datos acerca de talespropiedades, y cargar un conjunto de tablas acorde a los requerimientos del programa.Duracion´ : unos siete dıas´ .
Confeccion´ programa tanque
El programa propiamente dicho; definir las entradas y las salidas, los puntos de funciona-miento normal, que condiciones tiene que cumplir, y todos los detalles de implementa-cion´ . Se ha dedicado a esta etapa aproximadamente una semana y media.
Pruebas y correcciones tanque
Una vez que creemos que el programa esta listo, debemos probarlo una y otra vez hastaque finalmente verificamos que paso todas las pruebas a las que fue sometido. S iempreaparecen detalles no resueltos que hay que pulir en esta etapa. Duracion´ estimada: seisdıas´ .
Busqueda´ bibliografica´ canerıa˜ ´
Una vez que se ha cumplido con la ultima´ etapa del tanque, pasamos a hacer un segundocomponente de librerıa´ , una seccion´ de canerıa˜ ´ . Comenzamos investigando la bibliografıa´recomendada, profundizamos un poco en ella, y solo´ entonces estamos en condiciones depasar a la etapa siguiente. Se toma para esto un tiempo de unos cuatro dıas´ .
Llenado de tablas canerıa˜ ´
Una vez mas´ antes de simular nada debemos conseguir suficiente informacion´ acerca delas propiedades del agua en el rango en el cual trabajaremos. Necesitabamos´ mas´ cosasque en el caso del tanque, por lo que no fue suficiente con los datos con los que ya con-tabamos´ . Duracion´ : doce dıas´ .
Confeccion´ programa canerıa˜ ´
Corazon´ del programa; se encaro primero en una direccion´ , posteriormente se vio que nollevaba a buenos resultados y se opto por otro metodo´ mas´ sencillo y estable. Un pocomas´ adelante tuvo que hacerse otra implementacion´ , pues con una sola no bastaba paraabarcar los casos de flujos en una y dos fases.
Pruebas y correcciones canerıa˜ ´
Se verifico su funcionamiento para diferentes situaciones, se corrigieron detalles de imple-mentacion´ y finalmente se lo conecto con el modelo del tanque para certificar que andu-vieran en conjunto los modelos. Duracion´ aproximada: unos 1 2 dıas´ .
Redaccion´ del informe
Etapa final, a la cual se le ha dedicado unos ocho dıas´ , considerando que se tuvieron quecambiar varias cosas en el informe al cambiar las implementaciones.
Modelado de Componentes de un Reactor Nuclear utilizando Matlab-S imulink
35
Evaluacion´ Economica´
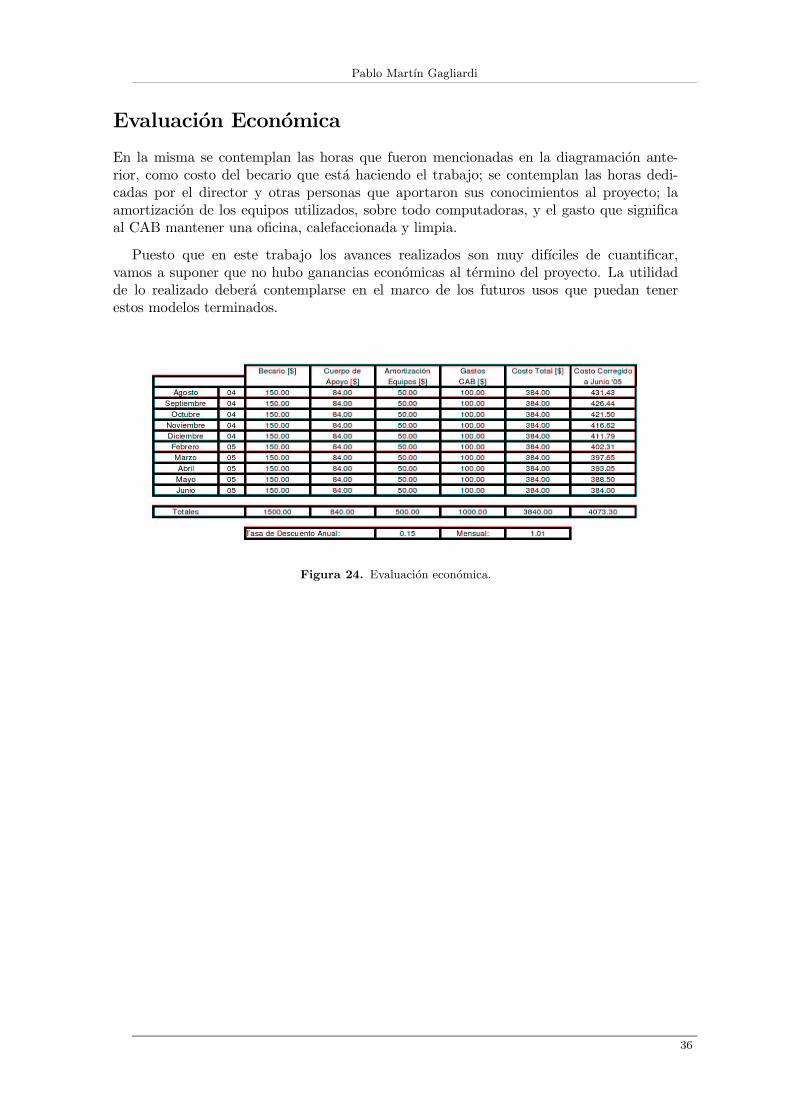
En la misma se contemplan las horas que fueron mencionadas en la diagramacion´ ante-rior, como costo del becario que esta haciendo el trabajo; se contemplan las horas dedi-cadas por el director y otras personas que aportaron sus conocimientos al proyecto; laamortizacion´ de los equipos utilizados, sobre todo computadoras, y el gasto que significaal CAB mantener una oficina, calefaccionada y limpia.
Puesto que en este trabajo los avances realizados son muy difıciles´ de cuantificar,vamos a suponer que no hubo ganancias economicas´ al termino´ del proyecto. La utilidadde lo realizado debera contemplarse en el marco de los futuros usos que puedan tenerestos modelos terminados.
Figura 24. Evaluacion´ economica´ .
Pablo Martın´ Gagliardi
36
Agosto 04 Mayo 05Septiembre 04 Octubre 04 Noviembre 04 Diciembre 04 Febrero 05 Marzo05 Abril 05 Junio 05
Aprendizaje MATLAB−SIMULINKFamiliarización con métodos existentesBúsqueda bibliográfica tanqueLlenado de tablas tanqueConfección programa tanquePruebas y correcciones tanqueBúsqueda bibliográfica cañeríaLlenado de tablas cañeríaConfección programa cañeríaPruebas y correcciones cañeríaRedacción del informe
Fig
ura
25.
Dia
gra
ma
de
tarea
srea
lizad
as
du
rante
elproy
ectoin
tegra
dor.
Modela
do
de
Com
pon
entes
de
un
Rea
ctor
Nuclea
ru
tilizand
oM
atla
b-S
imu
link
37

Agradecimientos AGRADECIMIENTOSA mi director Andres´ Etchepareborda, por la paciencia.
A mis companeros˜ , que en todo momento me ofrecieron ayuda, y confiaron en quepodıa´ hacer este trabajo. Especialmente a Juan Matıas´ Garcıa´ e Ignacio Marquez´ , quecomo NO confiaron en mı, me dieron una mano enorme.
A mi novia Mariela, por bancarme en toda esta travesıa´ .
A mis padres Carlos y Nelida´ , por criarme y malcriarme como corresponde.
A mis amigos que estan´ lejos, cuyo recuerdo siempre esta ahı para arrancarme unasonrisa.
Y a los amigos que estan´ cerca, que terminan de hacer de todo esto una experienciaincreıble´ .
38