Operation 2
26
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4 sect04.fm - 1 - OPERACIÓN SECCIÓN 4 OPERACIÓN ALCANCE DEL MANUAL Debido a las múltifiguraples y variadas operaciones de minería y aplicaciones de palas mecánicas, este manual no pretende abarcarlas en su totalidad, ni tampoco describir la secuencia de tareas de la pala mecánica. El propósito de esta sección es describir la operación de los controles individuales de movimiento e incluye algunos procedimientos de operación a modo de sugerencia, los cuales podrían ayudar al operador a operar de manera más segura, uniforme y eficaz esta pala mecánica. Estas sugerencias se ofrecen como recordatorio más que como instrucción, debido a que Harnischfeger Corporation entiende que una pala mecánica sólo debe ser utilizada por un operador completamente calificado. AVISO Es importante recordar que las técnicas incorrectas de operación provocan tiempo inactivo debido al exceso de desgaste o fatiga de los componentes. Al operar una pala mecánica, el operador debe: 1. Estar siempre consciente de los límites de operación de esta máquina. 2. Cerciorarse de que la pala mecánica esté bien mantenida efectuando las revisiones de prearranque descritas en el apartado PREARRANQUE en el paso 3, en la página 3-1. GENERALIDADES Los cuatro movimientos básicos de la pala son elevación, giro, avance y propulsión. Tres de dichos movimientos se utilizan para excavar y el otro para desplazar la pala. En el presente documento se describe la forma en que estos controles y combinaciones de controles mueven la pala y el cucharón. Los procedimientos de excavación y propulsión se analizarán posteriormente en esta sección. AVISO Todos los sistemas de frenos son sólo de retención y no se deben utilizar para detener el movimiento de la pala mecánica a menos que se trate de una emergencia.
-
Upload
david-astudillo -
Category
Documents
-
view
32 -
download
0
Transcript of Operation 2
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 1 -
OPERACIÓN
SECCIÓN 4
OPERACIÓN
ALCANCE DEL MANUAL
Debido a las múltifiguraples y variadas operaciones de minería y aplicaciones de palas mecánicas, este manual no pretende abarcarlas en su totalidad, ni tampoco describir la secuencia de tareas de la pala mecánica.
El propósito de esta sección es describir la operación de los controles individuales de movimiento e incluye algunos procedimientos de operación a modo de sugerencia, los cuales podrían ayudar al operador a operar de manera más segura, uniforme y eficaz esta pala mecánica.
Estas sugerencias se ofrecen como recordatorio más que como instrucción, debido a que Harnischfeger Corporation entiende que una pala mecánica sólo debe ser utilizada por un operador completamente calificado.
AVISO
Es importante recordar que las técnicas incorrectas de operación provocan tiempoinactivo debido al exceso de desgaste o fatiga de los componentes.
Al operar una pala mecánica, el operador debe:
1. Estar siempre consciente de los límites de operación de esta máquina.
2. Cerciorarse de que la pala mecánica esté bien mantenida efectuando las revisiones de prearranque descritas en el apartado PREARRANQUE en el paso 3, en la página 3-1.
GENERALIDADES
Los cuatro movimientos básicos de la pala son elevación, giro, avance y propulsión. Tres de dichos movimientos se utilizan para excavar y el otro para desplazar la pala.
En el presente documento se describe la forma en que estos controles y combinaciones de controles mueven la pala y el cucharón. Los procedimientos de excavación y propulsión se analizarán posteriormente en esta sección.
AVISO
Todos los sistemas de frenos son sólo de retención y no se deben utilizar para detenerel movimiento de la pala mecánica a menos que se trate de una emergencia.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 2 - sect04.fm
OPERACIÓN DE LOS CONTROLES INDIVIDUALES
Generalidades
En las siguientes descripciones de la operación de controles se incluyen referencias a las ilustraciones de los controles del operador tal cual aparecen en la sección 2.
Debido a los diversos estilos y configuraciones de los controles, y para fines de claridad, sólo se utiliza la Figura 2-1 para referenciar los controles montados en la consola en los siguientes procedimientos.
Control de elevación
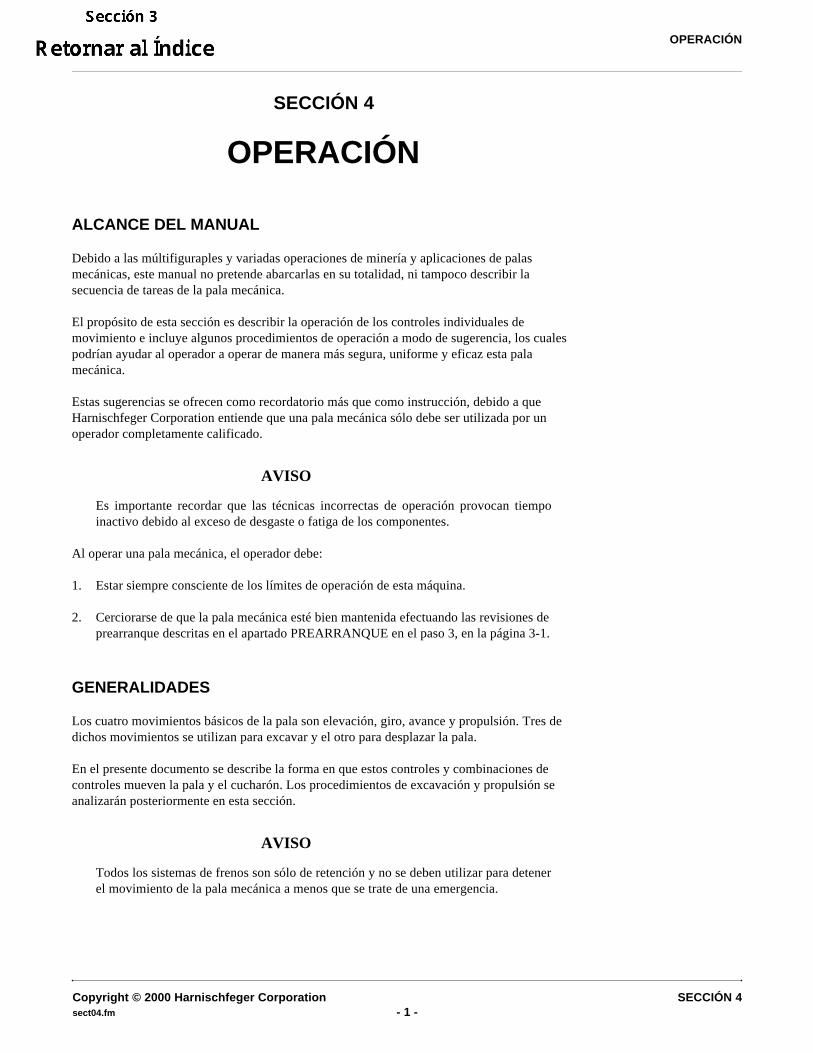
! ADVERTENCIALas pendientes pronunciadas (consulte la Figura 4-1) pueden causar unmovimiento inesperado, volcamiento o deslizamiento de la pala mecánica, lo quepuede provocar daños materiales y lesiones personales graves o letales. No lleve acabo operaciones de excavación en pendientes superiores al 5%. Siempre cercióresede que los frenos estén en perfecto estado para asegurar su máxima eficacia. Sifuese necesario operar la máquina en circunstancias como las antedichas, o situviera inquietudes al respecto, consulte a su representante local de P&H.
Figura 4-1: Excavación en pendientes
El CONTROLADOR DERECHO (consulte la Figura 4-2) sube y baja el cucharón después de que el botón HOIST CROWD (Elevación/Avance) (consulte el inciso 05, Figura 2-1) coloque la pala en el modo del mismo nombre y de que el botón HOIST BRAKES RELEASE (Desactivación de los frenos de elevación) (consulte el inciso 07, Figura 2-1) desactive el freno. Este controlador puede desempeñar dos operaciones al mismo tiempo, tales como subir o bajar y girar la sección superior (sólo si los frenos de giro se han desactivado manualmente).
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 3 -
OPERACIÓN
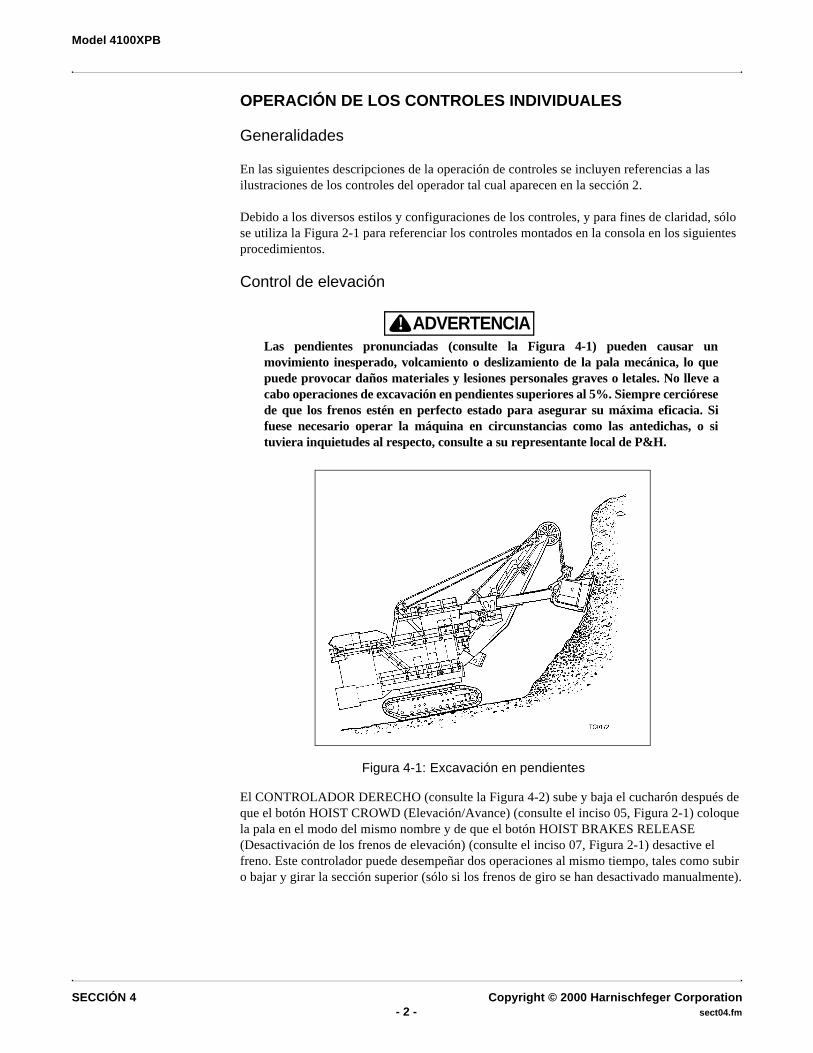
Figura 4-2: Controlador derecho
Suba o baje el cucharón de la siguiente manera:
1. Verifique que esté encendida la luz VERDE indicadora de elevación/avance (consulte el inciso 05, Figura 2-1), lo cual indica que la pala está en el modo de elevación/avance.
2. Oprima el pulsador HOIST BRAKES RELEASE (Desactivación de los frenos de elevación). La luz VERDE indicadora de desactivación de los frenos de elevación situada encima y a la izquierda del botón se encenderá cuando el sistema de frenos de elevación tenga la presión suficiente para desactivar los frenos.
AVISO
Se pueden producir daños en el equipo si el balanceador de los cables de elevación seeleva por encima de las roldanas de la punta de la pluma. Siempre mantenga el controlde la posición del cucharón.
3. Para elevar el cucharón, tire gradualmente el CONTROLADOR DERECHO desde su posición neutra hasta que el cucharón comience a moverse. La velocidad con que se eleva el cucharón es proporcional a la distancia que el CONTROLADOR se aparte de su posición neutra.
4. Para detener el movimiento de elevación, deje que el CONTROLADOR DERECHO vuelva a su posición neutra (central).
5. Para bajar el cucharón, desactive el freno de elevación si estuviera activado y presione gradualmente hacia adelante la palanca del CONTROLADOR DERECHO. La velocidad del cucharón es proporcional a la ubicación del controlador derecho.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 4 - sect04.fm
6. Para detener el movimiento descendente del cucharón, deje que el controlador vuelva a su posición neutra.
AVISO
Nunca salga del asiento del operador con el cucharón suspendido. Pose el cucharónen el suelo y active todos los frenos. Si fuese necesario dejar en suspensión uncucharón con carga mientras se espera una unidad de transporte, detengacompletamente el movimiento de elevación utilizando el controlador de elevación, yluego active los frenos.
7. Para mantener la posición del cucharón, deje el CONTROLADOR DERECHO en su posición neutra y active los frenos de elevación oprimiendo el pulsador HOIST BRAKES SET (Activación de los frenos de elevación) (consulte el inciso 06, Figura 2-1).
Control de giro
! ADVERTENCIALas pendientes pronunciadas (consulte la Figura 4-1) pueden causarmovimientos inesperados, volcamiento o deslizamiento de la pala, lo que puedeprovocar daños materiales y lesiones graves o letales. Nunca efectúe operacionesde excavación en pendientes superiores al 5%. Siempre cerciórese de que todoslos frenos estén en perfecto estado para asegurar su máxima eficacia. Si fuesenecesario efectuar operaciones en circunstancias como las antedichas, o situviera inquietudes al respecto, consulte a su representante de P&H.
El CONTROLADOR DERECHO (Figura 4-2) permite rotar (girar) la sección giratoria (superior) de la pala en la parte inferior después de desactivar el freno de giro.
AVISO
A pedido del cliente, el controlador de giro se puede reubicar en el controladorizquierdo. Esto significaría también que cambiarían de posición al controladorderecho las funciones de la bocina y de apertura del cucharón.
Haga rotar la sección giratoria de la siguiente manera:
1. Desactive los frenos de giro oprimiendo el pulsador SWING BRAKES RELEASE (Desactivación de los frenos de giro).
2. Para girar a la derecha, mueva la palanca del CONTROLADOR DERECHO hacia la derecha. La aceleración del giro corresponderá a la distancia que se mueva la palanca desde su posición central.
3. Para girar a la izquierda, mueva el CONTROLADOR DERECHO hacia la izquierda. La aceleración del giro corresponderá a la distancia que se mueva la palanca desde su posición central.
4. Para desacelerar o detener el movimiento de giro en cada dirección, deje que el CONTROLADOR DERECHO vuelva a su posición central (neutra) y luego muévalo en la dirección contraria para continuar o detener el giro.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 5 -
OPERACIÓN
5. Para fijar la sección giratoria, deténgala completamente utilizando el controlador de giro, y luego active los frenos de giro oprimiendo el pulsador SWING BRAKES SET (Activación de los frenos de giro) (consulte el inciso 10, Figura 2-1) o bien el pulsador ALL BRAKES SET (Activación de todos los frenos) (consulte el inciso 12, Figura 2-1).
AVISO
Al oprimir el pulsador ALL BRAKES SET (Activación de todos los frenos) seactivarán todos los frenos incluyendo el de giro.
Control de avance
! ADVERTENCIALas pendientes pronunciadas (consulte la Figura 4-1) pueden causarmovimientos inesperados, volcamiento o deslizamiento de la pala, lo que puedeprovocar daños materiales y lesiones graves o letales. Nunca efectúe operacionesde excavación en pendientes superiores al 5%. Siempre cerciórese de que todoslos frenos estén en perfecto estado para asegurar su máxima eficacia. Si fuesenecesario efectuar operaciones en circunstancias como las antedichas, o situviera inquietudes al respecto, consulte a su representante de P&H.
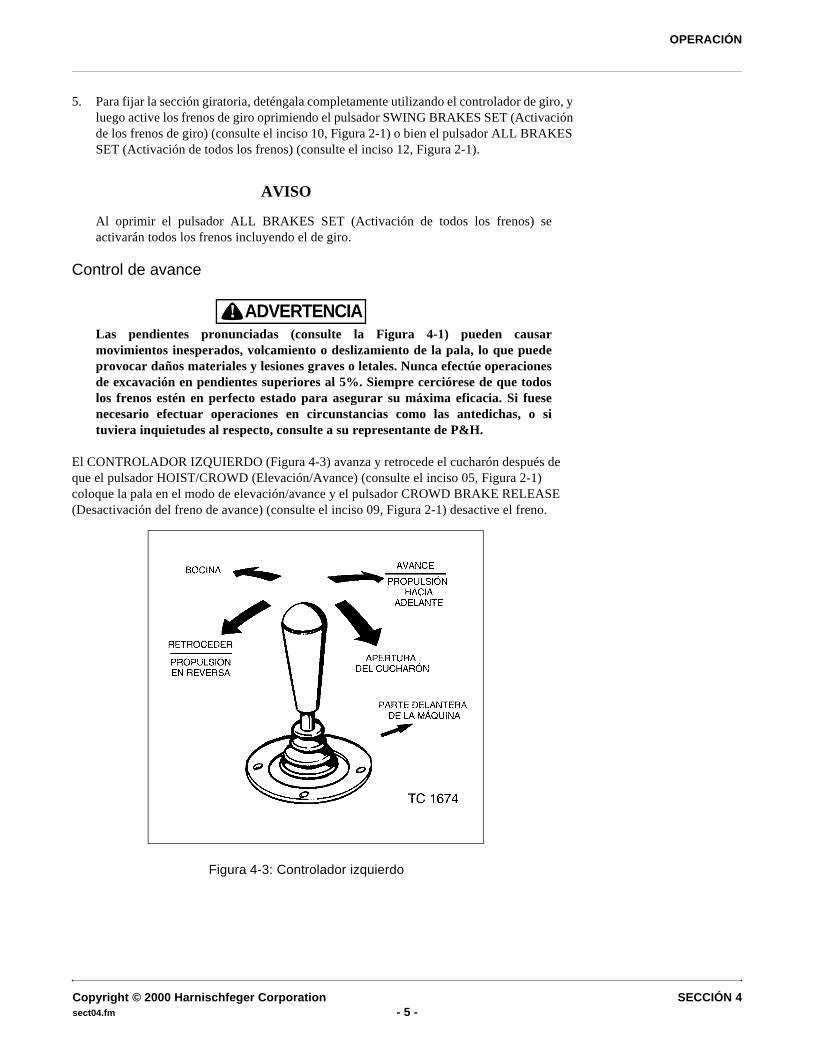
El CONTROLADOR IZQUIERDO (Figura 4-3) avanza y retrocede el cucharón después de que el pulsador HOIST/CROWD (Elevación/Avance) (consulte el inciso 05, Figura 2-1) coloque la pala en el modo de elevación/avance y el pulsador CROWD BRAKE RELEASE (Desactivación del freno de avance) (consulte el inciso 09, Figura 2-1) desactive el freno.
Figura 4-3: Controlador izquierdo
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 6 - sect04.fm
El movimiento de avance/retroceso corresponde al desplazamiento del cucharón a lo largo de una línea imaginaria desde la base de la pluma hasta un lugar situado bajo la punta de la pluma. Al operar el CONTROLADOR IZQUIERDO se extiende y retrocede el cucharón a lo largo de esta línea imaginaria, colocándolo en posición para excavar y descargar.
Haga avanzar y retroceder el cucharón de la siguiente manera:
1. Verifique que esté encendida la luz VERDE indicadora de elevación/avance, lo cual indica que la pala está en el modo del mismo nombre.
2. Oprima el pulsador CROWD BRAKES RELEASE (Desactivación de los frenos de avance). La luz VERDE indicadora de desactivación del freno de avance (consulte el inciso 09, Figura 2-1) se encenderá cuando la línea de aire del freno de avance tenga la presión suficiente para desactivarlo.
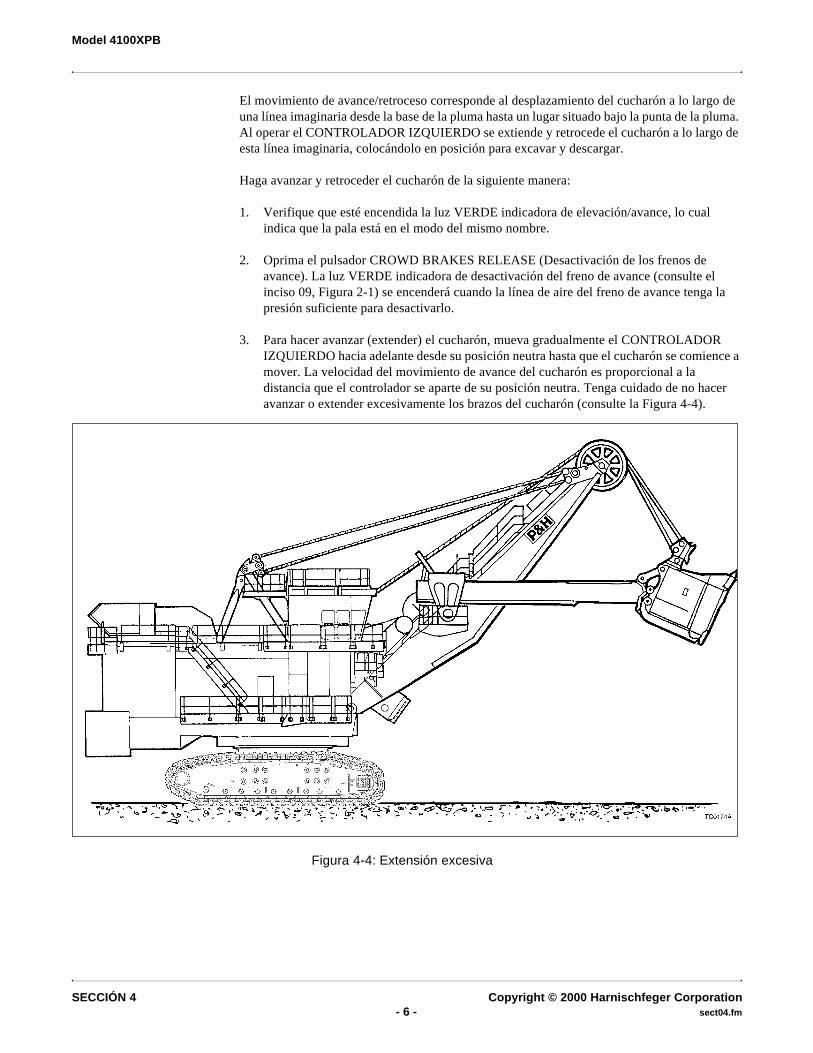
3. Para hacer avanzar (extender) el cucharón, mueva gradualmente el CONTROLADOR IZQUIERDO hacia adelante desde su posición neutra hasta que el cucharón se comience a mover. La velocidad del movimiento de avance del cucharón es proporcional a la distancia que el controlador se aparte de su posición neutra. Tenga cuidado de no hacer avanzar o extender excesivamente los brazos del cucharón (consulte la Figura 4-4).
Figura 4-4: Extensión excesiva
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 7 -
OPERACIÓN
4. Para hacer retroceder el cucharón, tire el CONTROLADOR IZQUIERDO hasta dejarlo en su posición neutra. La velocidad del cucharón es proporcional a la distancia que se aparte la palanca desde su posición neutra. Evite hacer retroceder el cucharón hasta la pluma.
AVISO
El interruptor de límite de avance programable detendrá el movimiento de sobra delbrazo del cucharón cuando se haya sobrepasado el límite programado de avance oretroceso. Mueva el CONTROLADOR IZQUIERDO en la dirección contraria paradejar el brazo del cucharón nuevamente dentro de los límites programados y poderseguir avanzando o retrocediendo.
5. Para detener el movimiento de avance o retroceso del cucharón, deje que el CONTROLADOR IZQUIERDO vuelva a la posición neutra.
6. Para mantener la posición de avance/retroceso del cucharón, deje el controlador izquierdo (avance) en posición neutra y active el freno de avance oprimiendo el pulsador CROWD BRAKES SET (Activación de los frenos de avance) (consulte el inciso 08, Figura 2-1).
7. Para activar la señal sonora de la pala, mueva el CONTROLADOR IZQUIERDO a la izquierda desde su posición central.
8. Para operar el conjunto de apertura del cucharón, mueva el CONTROLADOR IZQUIERDO a la derecha desde su posición central. Esto permite que el tambor de apertura del cucharón aumente el tiro en el cable de apertura, accionando el pestillo de la compuerta del cucharón.
Control de propulsión
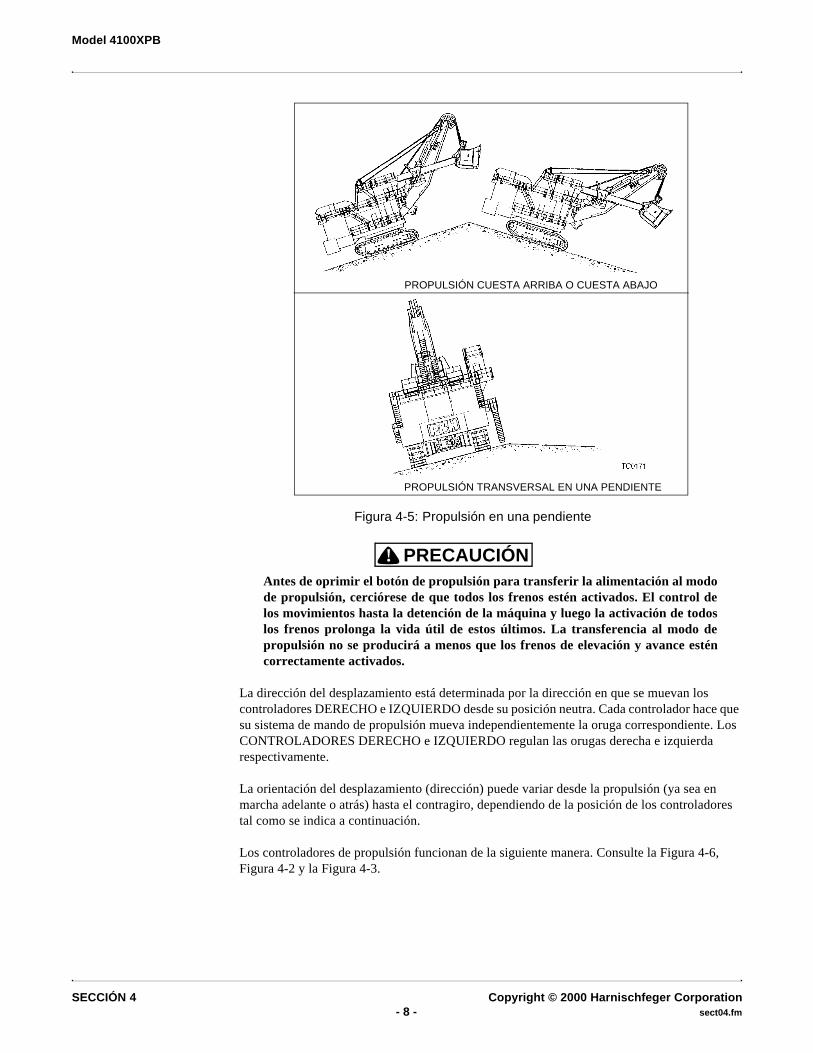
! ADVERTENCIAEl movimiento inesperado de la pala mecánica o sus componentes debido a lapropulsión en una pendiente (consulte la Figura 4-5) puede causar elvolcamiento o deslizamiento de la máquina, lo que puede provocar dañosmateriales y lesiones personales graves o letales. No impulse la pala cuesta arribao cuesta abajo en una pendiente superior al 20%, ni de costado(transversalmente) en una pendiente superior al 10%. Siempre cerciórese de quetodos los frenos estén en perfecto estado para asegurar su máxima eficacia. Sidebe impulsar la máquina con frecuencia en circunstancias como las antedichas,o si tuviera inquietudes al respecto, consulte a su representante local de P&H.
Los CONTROLADORES DERECHO e IZQUIERDO (Figura 4-2 y Figura 4-3) permiten mover o impulsar la pala después de que el pulsador PROPEL (Propulsión) (consulte el inciso 04, Figura 2-1) la coloque en el modo del mismo nombre, desactivando los frenos de propulsión. Los controladores regulan la velocidad y dirección del desplazamiento de las correas de las orugas.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 8 - sect04.fm
Figura 4-5: Propulsión en una pendiente
! DANGERPRECAUCIÓNAntes de oprimir el botón de propulsión para transferir la alimentación al modode propulsión, cerciórese de que todos los frenos estén activados. El control delos movimientos hasta la detención de la máquina y luego la activación de todoslos frenos prolonga la vida útil de estos últimos. La transferencia al modo depropulsión no se producirá a menos que los frenos de elevación y avance esténcorrectamente activados.
La dirección del desplazamiento está determinada por la dirección en que se muevan los controladores DERECHO e IZQUIERDO desde su posición neutra. Cada controlador hace que su sistema de mando de propulsión mueva independientemente la oruga correspondiente. Los CONTROLADORES DERECHO e IZQUIERDO regulan las orugas derecha e izquierda respectivamente.
La orientación del desplazamiento (dirección) puede variar desde la propulsión (ya sea en marcha adelante o atrás) hasta el contragiro, dependiendo de la posición de los controladores tal como se indica a continuación.
Los controladores de propulsión funcionan de la siguiente manera. Consulte la Figura 4-6, Figura 4-2 y la Figura 4-3.
PROPULSIÓN CUESTA ARRIBA O CUESTA ABAJO
PROPULSIÓN TRANSVERSAL EN UNA PENDIENTE
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 9 -
OPERACIÓN
AVISO
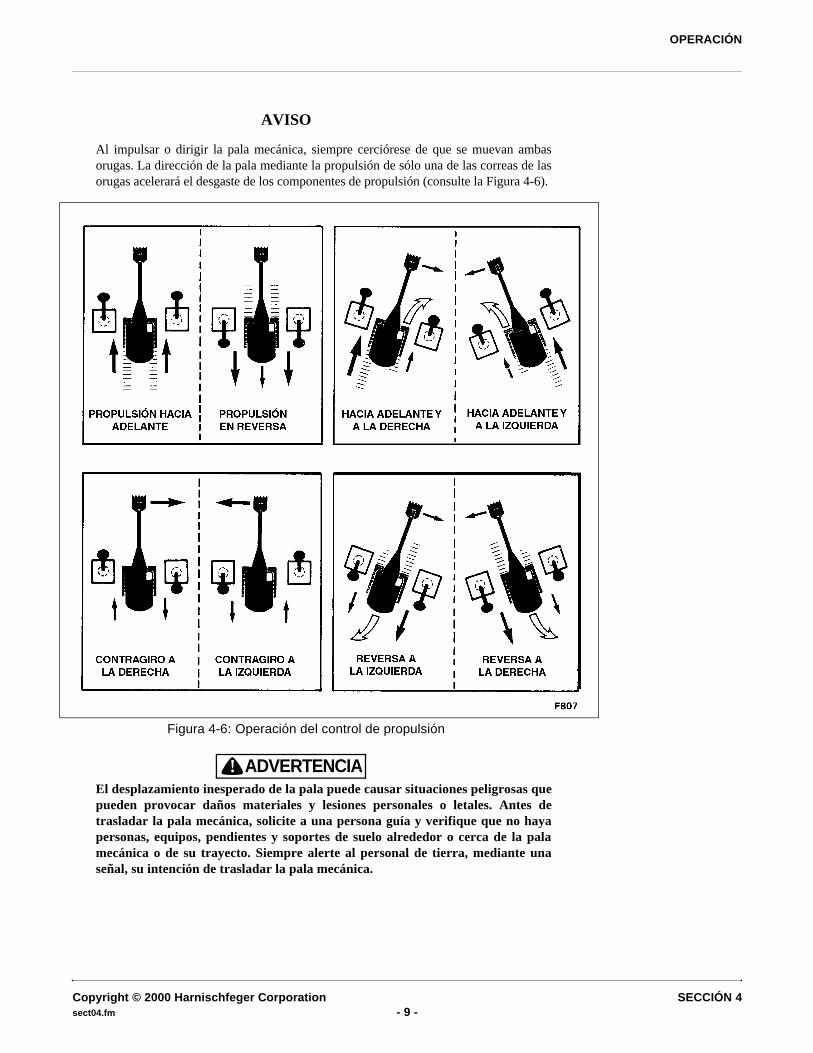
Al impulsar o dirigir la pala mecánica, siempre cerciórese de que se muevan ambasorugas. La dirección de la pala mediante la propulsión de sólo una de las correas de lasorugas acelerará el desgaste de los componentes de propulsión (consulte la Figura 4-6).
Figura 4-6: Operación del control de propulsión
! ADVERTENCIAEl desplazamiento inesperado de la pala puede causar situaciones peligrosas quepueden provocar daños materiales y lesiones personales o letales. Antes detrasladar la pala mecánica, solicite a una persona guía y verifique que no hayapersonas, equipos, pendientes y soportes de suelo alrededor o cerca de la palamecánica o de su trayecto. Siempre alerte al personal de tierra, mediante unaseñal, su intención de trasladar la pala mecánica.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 10 - sect04.fm
1. Para las operaciones normales de propulsión, coloque la sección superior con el conjunto de la pluma sobre la parte delantera del chasis y/o la cabina del operador mirando hacia adelante.
AVISO
Esto sirve para que la pala se desplace en la misma dirección en que se muevan loscontroladores. Si la cabina del operador no da hacia la parte delantera del chasis delvehículo, calcule cuidadosamente la dirección en la que se desplazará en relación conlos movimientos del controlador.
2. Para un movimiento de propulsión directo hacia adelante, mueva ambos controladores al mismo tiempo y en la misma cantidad desde su posición neutra (central) (consulte la Figura 4-6). La velocidad es proporcional a la distancia que se muevan los controladores desde su posición vertical (neutra).
! ADVERTENCIASi se rompe o daña el cable eléctrico de cola, se pueden producir dañosmateriales y lesiones graves o letales causadas por descargas eléctricas. Revise laposición del cable antes de comenzar a operar la pala mecánica. Utilice unapersona guía para evitar que se dañe este cable durante el desplazamiento de lapala. Nunca toque el cable sin contar con el equipo de seguridad apropiado paraalto voltaje.
3. Para invertir la dirección durante la propulsión, deje que los controladores se detengan en la posición neutra durante una breve pausa antes de cambiar la dirección.
4. Para un movimiento recto de propulsión en “reversa”, tire ambos controladores de propulsión directamente hacia atrás. La velocidad es proporcional a la distancia que se muevan las palancas controladoras desde su posición vertical (neutra). Para evitar tensión y desgaste adicionales en los componentes de las orugas, utilice la propulsión en reversa lo menos posible y no lo haga en pendientes.
5. Para virar a la derecha al estar desplazándose hacia adelante, mueva el CONTROLADOR IZQUIERDO hacia adelante desde su posición neutra. Dependiendo del grado de giro, mueva levemente el CONTROLADOR DERECHO hacia adelante para lograr un giro más amplio.
! ADVERTENCIALa contrarrotación puede hacer que una de las correas de las orugas pase porencima del cable eléctrico de desplazamiento, lo que podría provocar dañosmateriales y lesiones graves o letales causadas por descargas eléctricas. Siempreutilice una persona guía para determinar la posición del cable móvil al intentarhacer un contragiro. Nunca toque el cable sin contar con el equipo de seguridadapropiado para alto voltaje.
Para hacer un contragiro a la derecha, mueva el CONTROLADOR IZQUIERDO hacia adelante y tire hacia atrás el CONTROLADOR DERECHO. Esto producirá un contragiro a la derecha (consulte la Figura 4-6).
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 11 -
OPERACIÓN
AVISO
La contrarrotación se debe evitar o mantener en un ángulo de giro mínimo de 15° a 20° en una superficie suelta o blanda, de lo contrario las zapatas y los componentes de las orugas se enredarán con rocas y desechos, acelerando el desgaste de los componentes de propulsión. La propulsión hacia adelante en distancias cortas en incrementos de 15° ó 20° por lo general sirve para limpiar los componentes de las orugas.
6. Para virar a la izquierda al estar desplazándose hacia adelante, mueva el CONTROLADOR DERECHO hacia adelante desde su posición neutra y, dependiendo del grado de giro, mueva levemente el CONTROLADOR IZQUIERDO hacia adelante para lograr un giro más amplio.
! ADVERTENCIALa contrarrotación puede hacer que una de las correas de las orugas pase porencima del cable eléctrico de desplazamiento, lo que podría provocar tanto dañosmateriales como lesiones graves y letales debido a descargas eléctricas. Siempreutilice una persona guía para determinar la posición del cable móvil al intentarhacer un contragiro. Nunca toque el cable sin contar con el equipo de seguridadapropiado para alto voltaje.
Para hacer un contragiro a la izquierda, mueva el CONTROLADOR DERECHO hacia adelante y tire hacia atrás el CONTROLADOR IZQUIERDO. Esto producirá un contragiro a la izquierda (consulte la Figura 4-6).
AVISO
La contrarrotación se debe evitar o mantener en un ángulo de giro mínimo de 15° a20° en una superficie suelta o blanda, de lo contrario las zapatas y los componentes delas orugas se enredarán con rocas y desechos, acelerando el desgaste de loscomponentes de propulsión. La propulsión hacia adelante en distancias cortas enincrementos de 15° ó 20° por lo general sirve para limpiar los componentes de lasorugas.
7. Para virar a la izquierda o derecha al estar en reversa, coloque el controlador tal como se indica en la Figura 4-6. La propulsión en reversa se debe utilizar lo menos posible para evitar la tensión o desgaste adicionales en los componentes de las orugas.
8. Para detener el movimiento de propulsión, deje que los controladores vuelvan a la posición neutra, que la pala se detenga y luego cambie el modo de operación oprimiendo el pulsador HOIST CROWD (Elevación/Avance) (consulte el inciso 05, Figura 2-1), lo cual activará automáticamente los frenos de propulsión. En una situación de emergencia, oprima el pulsador STOP (Parada) de la pala mecánica (consulte el inciso 19, Figura 2-1).
AVISO
Detenga completamente el movimiento de propulsión antes de pasar al modo deoperación de avance/elevación. Al oprimir el pulsador HOIST CROWD (Elevación/Avance) mientras la pala se esté moviendo hará que se activen los frenos depropulsión en un estado dinámico y provocará un desgaste prematuro en loscomponentes de los frenos de propulsión.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 12 - sect04.fm
CICLO DE EXCAVACIÓN
! DANGERPRECAUCIÓNEl movimiento inesperado de los componentes de la pala mecánica al efectuaroperaciones de excavación en una pendiente (consulte la Figura 4-1) puedecausar el volcamiento o deslizamiento de la pala mecánica, lo que puedeprovocar daños materiales y lesiones personales graves o letales. No lleve a cabooperaciones de excavación en pendientes superiores al 5%. Siempre cercióresede que todos los frenos estén en perfecto estado para asegurar su máximaeficacia. Si fuese necesario efectuar operaciones con frecuencia en circunstanciascomo las antedichas, o si tuviera inquietudes al respecto, consulte a surepresentante local de P&H.
Generalidades
Una operación de excavación segura y eficaz requiere una manipulación coordinada de los controles de avance, elevación y giro en una secuencia uniforme de pasos. Para fines de este manual, esta secuencia se divide en las fases de excavación, giro, descarga y retorno. Además de estas sugerencias de operación, cada fase incluye información y precauciones importantes que el operador debe conocer antes de comenzar a trabajar.
Fase de excavación
1. La fase de excavación incluye el avance del cucharón hacia el terraplén, la elevación del cucharón para su llenado y el retroceso del cucharón desde el terraplén.
2. El movimiento de avance produce un impulso, lo cual fuerza al cucharón hacia el terraplén al comienzo de la fase de excavación y brinda el impulso necesario para forzar los dientes del cucharón bajo una cantidad suficiente de material, logrando así un uso eficaz de la fuerza de gancho.
AVISO
Siempre se debe mantener el ajuste correcto de los interruptores de límite de avance/retroceso.
3. El movimiento de elevación durante la fase de excavación corresponde al movimiento de la pala que proporciona la fuerza de gancho.
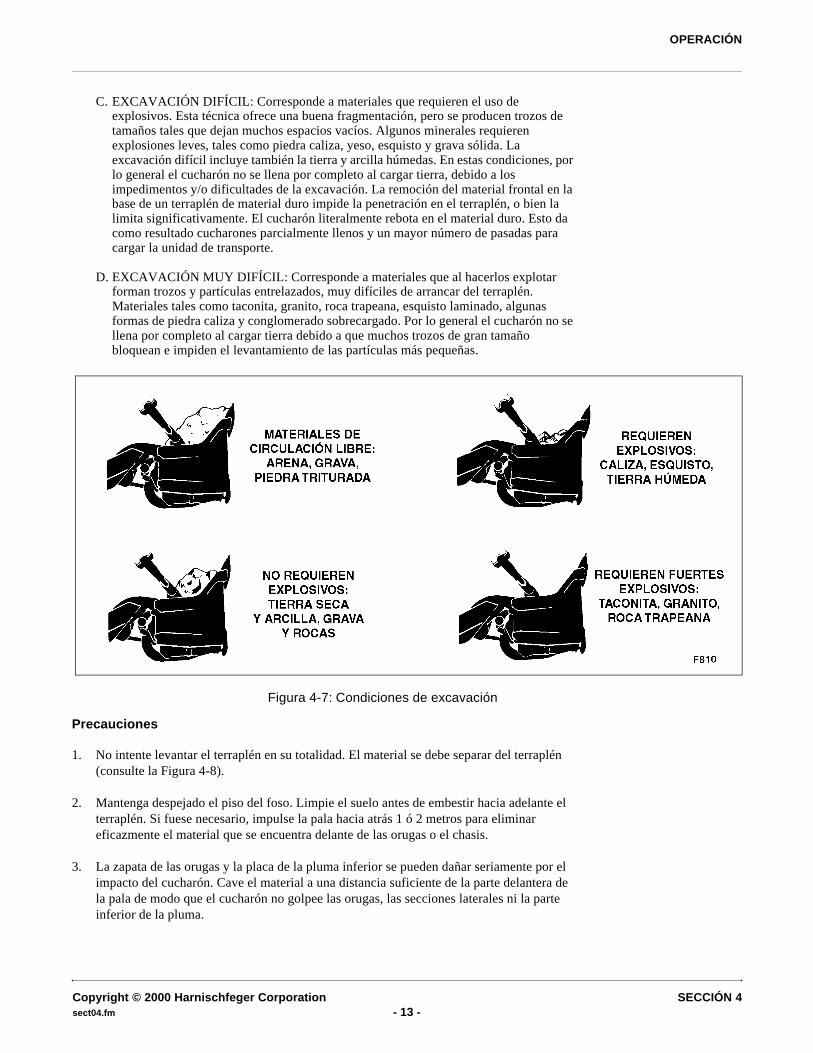
4. El tipo y peso del material que se está cavando afecta el movimiento de elevación (fuerza de gancho) y el movimiento de giro al cavar. Hay cuatro posibles condiciones de excavación, que son las siguientes (consulte la Figura 4-7).
A. EXCAVACIÓN SENCILLA: Corresponde a materiales sueltos de circulación libre y en forma de gránulos, tales como arena natural y depósitos de grava sin piedras de gran tamaño. La excavación sencilla incluye también pilas de material acumulado, tales como carbón, piedra picada fina y minerales concentrados.
B. EXCAVACIÓN MEDIANA: Corresponde a materiales excavados de lechos naturales sin usar explosivos, tales como tierra y arcilla secas, grava arcillosa con algunas piedras, excavaciones no clasificadas, minerales que no requieren explosivos y carbón. El cucharón generalmente se llena, ayudado por la tendencia natural del material a fluir cuando es fragmentado por la punta de excavación.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 13 -
OPERACIÓN
C. EXCAVACIÓN DIFÍCIL: Corresponde a materiales que requieren el uso de explosivos. Esta técnica ofrece una buena fragmentación, pero se producen trozos de tamaños tales que dejan muchos espacios vacíos. Algunos minerales requieren explosiones leves, tales como piedra caliza, yeso, esquisto y grava sólida. La excavación difícil incluye también la tierra y arcilla húmedas. En estas condiciones, por lo general el cucharón no se llena por completo al cargar tierra, debido a los impedimentos y/o dificultades de la excavación. La remoción del material frontal en la base de un terraplén de material duro impide la penetración en el terraplén, o bien la limita significativamente. El cucharón literalmente rebota en el material duro. Esto da como resultado cucharones parcialmente llenos y un mayor número de pasadas para cargar la unidad de transporte.
D. EXCAVACIÓN MUY DIFÍCIL: Corresponde a materiales que al hacerlos explotar forman trozos y partículas entrelazados, muy difíciles de arrancar del terraplén. Materiales tales como taconita, granito, roca trapeana, esquisto laminado, algunas formas de piedra caliza y conglomerado sobrecargado. Por lo general el cucharón no se llena por completo al cargar tierra debido a que muchos trozos de gran tamaño bloquean e impiden el levantamiento de las partículas más pequeñas.
Figura 4-7: Condiciones de excavación
Precauciones
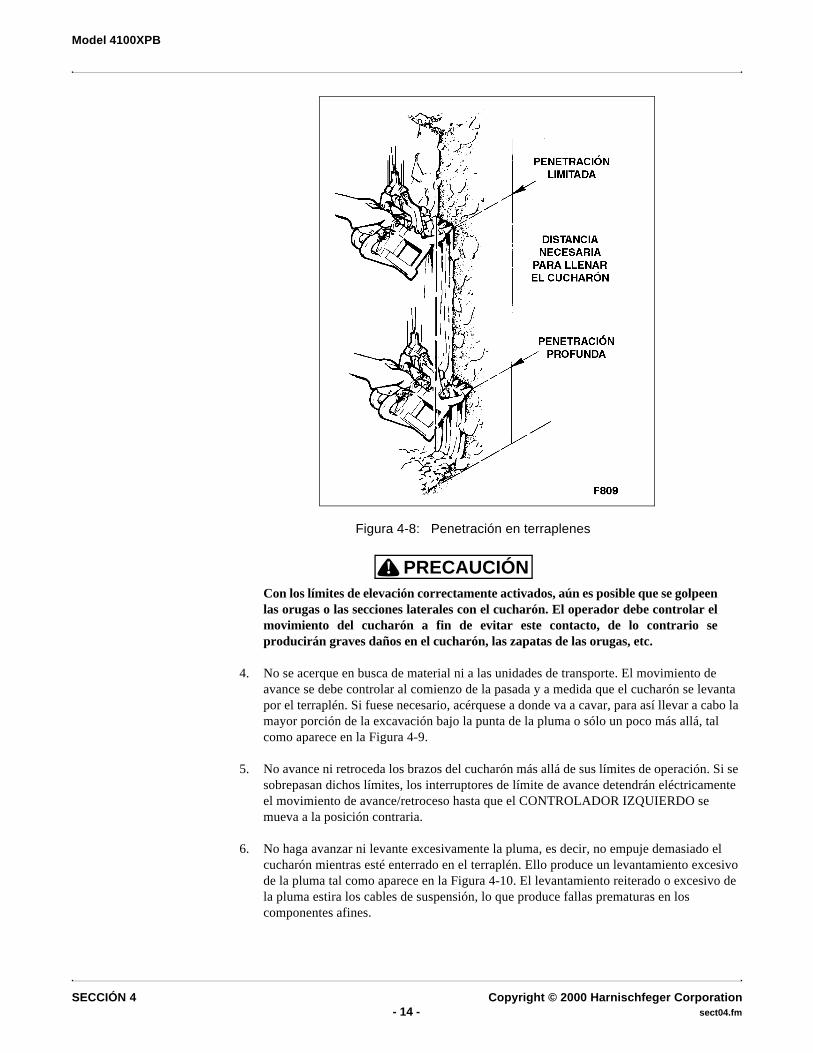
1. No intente levantar el terraplén en su totalidad. El material se debe separar del terraplén (consulte la Figura 4-8).
2. Mantenga despejado el piso del foso. Limpie el suelo antes de embestir hacia adelante el terraplén. Si fuese necesario, impulse la pala hacia atrás 1 ó 2 metros para eliminar eficazmente el material que se encuentra delante de las orugas o el chasis.
3. La zapata de las orugas y la placa de la pluma inferior se pueden dañar seriamente por el impacto del cucharón. Cave el material a una distancia suficiente de la parte delantera de la pala de modo que el cucharón no golpee las orugas, las secciones laterales ni la parte inferior de la pluma.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 14 - sect04.fm
Figura 4-8: Penetración en terraplenes
! DANGERPRECAUCIÓNCon los límites de elevación correctamente activados, aún es posible que se golpeenlas orugas o las secciones laterales con el cucharón. El operador debe controlar elmovimiento del cucharón a fin de evitar este contacto, de lo contrario seproducirán graves daños en el cucharón, las zapatas de las orugas, etc.
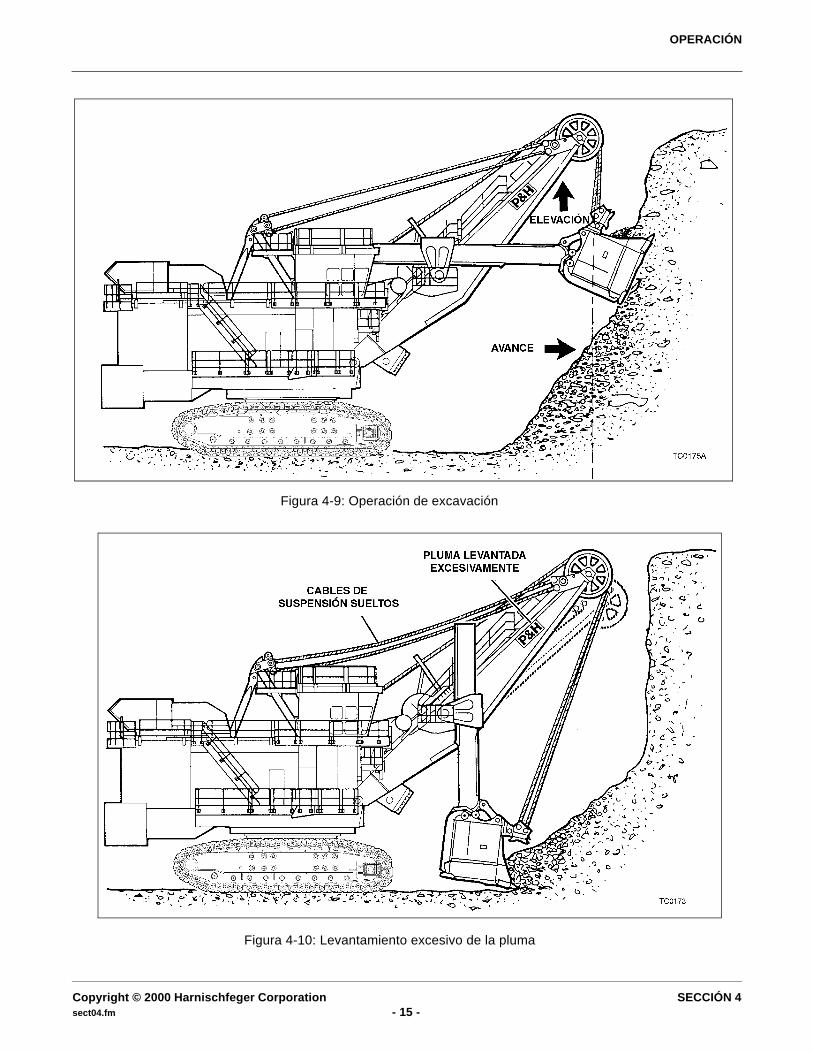
4. No se acerque en busca de material ni a las unidades de transporte. El movimiento de avance se debe controlar al comienzo de la pasada y a medida que el cucharón se levanta por el terraplén. Si fuese necesario, acérquese a donde va a cavar, para así llevar a cabo la mayor porción de la excavación bajo la punta de la pluma o sólo un poco más allá, tal como aparece en la Figura 4-9.
5. No avance ni retroceda los brazos del cucharón más allá de sus límites de operación. Si se sobrepasan dichos límites, los interruptores de límite de avance detendrán eléctricamente el movimiento de avance/retroceso hasta que el CONTROLADOR IZQUIERDO se mueva a la posición contraria.
6. No haga avanzar ni levante excesivamente la pluma, es decir, no empuje demasiado el cucharón mientras esté enterrado en el terraplén. Ello produce un levantamiento excesivo de la pluma tal como aparece en la Figura 4-10. El levantamiento reiterado o excesivo de la pluma estira los cables de suspensión, lo que produce fallas prematuras en los componentes afines.
OPERACIÓN
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 15 -
Figura 4-9: Operación de excavación
Figura 4-10: Levantamiento excesivo de la pluma
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 16 - sect04.fm
! DANGERPRECAUCIÓNEl levantamiento excesivo de la pluma puede causar graves daños a los cables desuspensión, conjunto de la pluma y conjunto de la grúa.
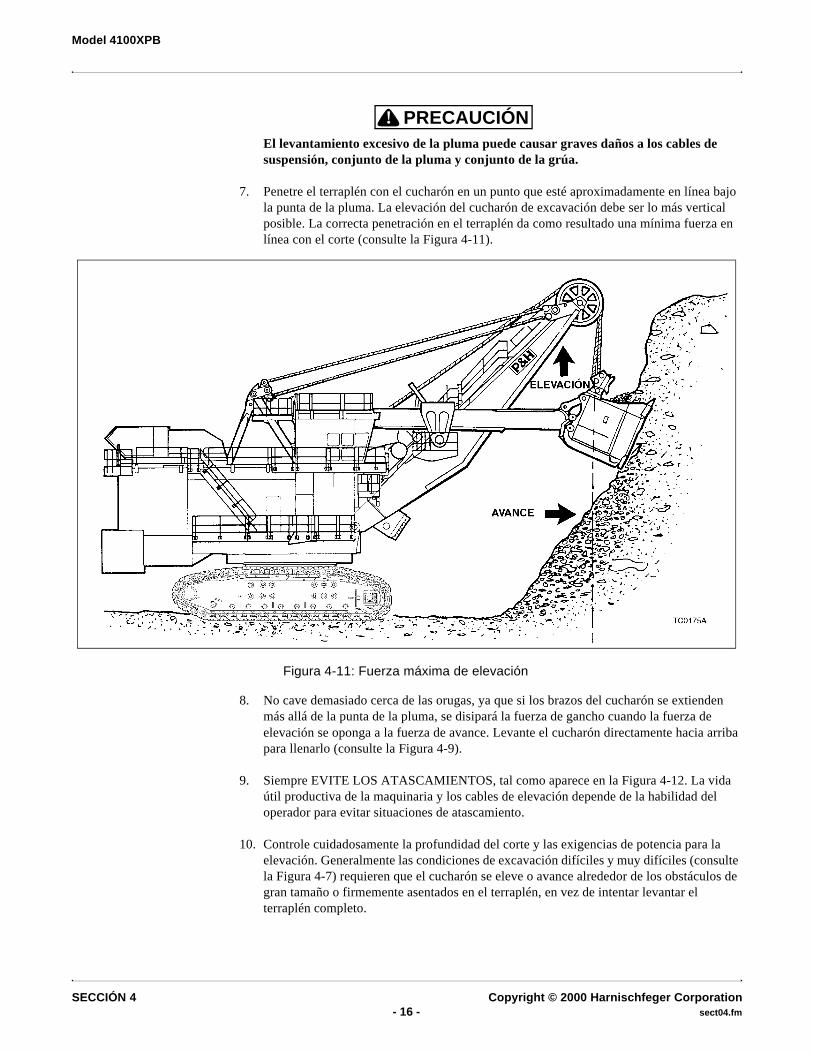
7. Penetre el terraplén con el cucharón en un punto que esté aproximadamente en línea bajo la punta de la pluma. La elevación del cucharón de excavación debe ser lo más vertical posible. La correcta penetración en el terraplén da como resultado una mínima fuerza en línea con el corte (consulte la Figura 4-11).
Figura 4-11: Fuerza máxima de elevación
8. No cave demasiado cerca de las orugas, ya que si los brazos del cucharón se extienden más allá de la punta de la pluma, se disipará la fuerza de gancho cuando la fuerza de elevación se oponga a la fuerza de avance. Levante el cucharón directamente hacia arriba para llenarlo (consulte la Figura 4-9).
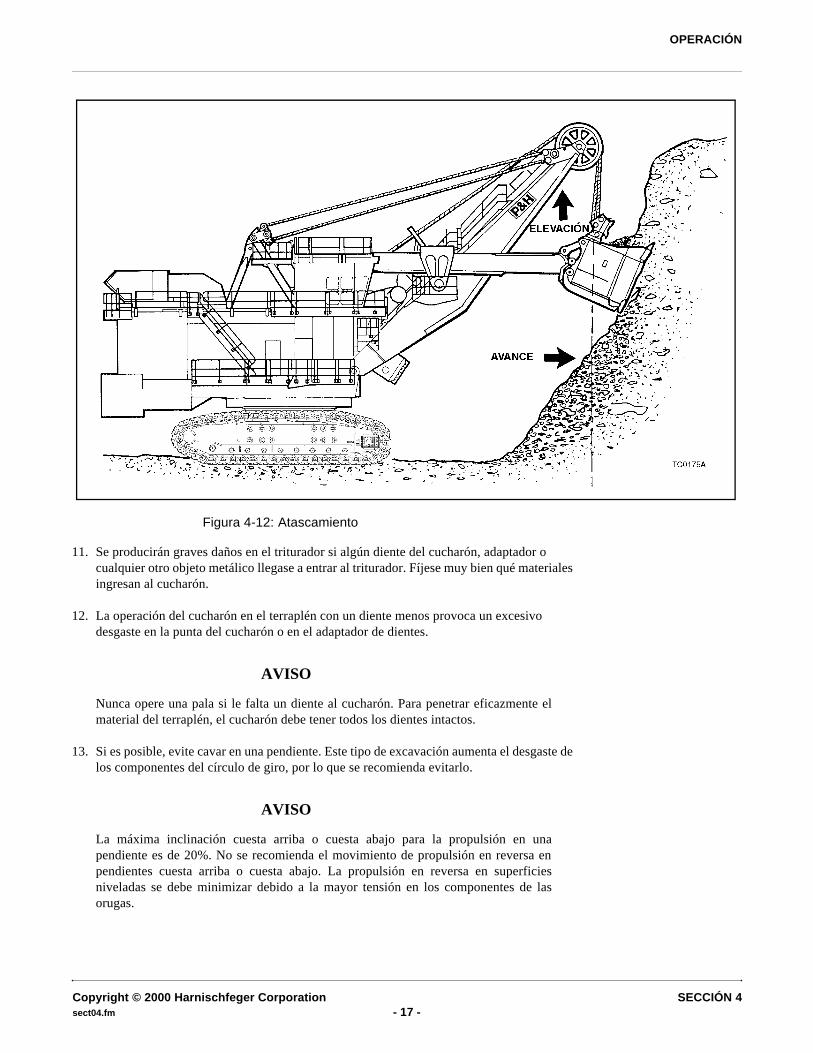
9. Siempre EVITE LOS ATASCAMIENTOS, tal como aparece en la Figura 4-12. La vida útil productiva de la maquinaria y los cables de elevación depende de la habilidad del operador para evitar situaciones de atascamiento.
10. Controle cuidadosamente la profundidad del corte y las exigencias de potencia para la elevación. Generalmente las condiciones de excavación difíciles y muy difíciles (consulte la Figura 4-7) requieren que el cucharón se eleve o avance alrededor de los obstáculos de gran tamaño o firmemente asentados en el terraplén, en vez de intentar levantar el terraplén completo.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 17 -
OPERACIÓN
Figura 4-12: Atascamiento
11. Se producirán graves daños en el triturador si algún diente del cucharón, adaptador o cualquier otro objeto metálico llegase a entrar al triturador. Fíjese muy bien qué materiales ingresan al cucharón.
12. La operación del cucharón en el terraplén con un diente menos provoca un excesivo desgaste en la punta del cucharón o en el adaptador de dientes.
AVISO
Nunca opere una pala si le falta un diente al cucharón. Para penetrar eficazmente elmaterial del terraplén, el cucharón debe tener todos los dientes intactos.
13. Si es posible, evite cavar en una pendiente. Este tipo de excavación aumenta el desgaste de los componentes del círculo de giro, por lo que se recomienda evitarlo.
AVISO
La máxima inclinación cuesta arriba o cuesta abajo para la propulsión en unapendiente es de 20%. No se recomienda el movimiento de propulsión en reversa enpendientes cuesta arriba o cuesta abajo. La propulsión en reversa en superficiesniveladas se debe minimizar debido a la mayor tensión en los componentes de lasorugas.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 18 - sect04.fm
Sugerencias de operación
Consulte la Figura 2-1, Figura 4-2 y la Figura 4-3 al utilizar el siguiente procedimiento.
1. Cerciórese de que la pala esté en el modo de elevación/avance y que los frenos de giro estén desactivados. Si la pala está en el modo de propulsión, oprima los pulsadores HOIST CROWD (Elevación/Avance) y BRAKE RELEASE (Desactivación del freno).
2. Cerciórese de que la luz VERDE de elevación/avance y que las luces VERDES de desactivación de los frenos de elevación, avance y giro estén encendidas. La elevación excesiva de la pluma estira los cables de suspensión, lo que provoca fallas prematuras en sus componentes afines. Tenga cuidado de no hacer avanzar ni levantar excesivamente la pluma, tal como aparece en la Figura 4-10.
3. Mueva los CONTROLADORES DERECHO e IZQUIERDO para mover los dientes y la punta del cucharón hacia el terraplén. La excavación propiamente se llevará a cabo en una zona justo atrás o delante de la línea vertical (imaginaria) que atraviesa la pluma. La correcta penetración en el terraplén se produce cuando la fuerza máxima coincide exactamente con el corte.
Si la pluma se levanta excesivamente al penetrar el terraplén, puede ocurrir uno de los siguientes fenómenos:
• Si la pluma se levanta un poco más de lo debido, entrará en contacto con la primera etapa del interruptor de límite de la pluma y se detendrá el avance.
Por ejemplo: si el brazo del controlador está en la posición de avance y se levanta excesivamente la pluma, se inhibirá el movimiento de avance, incluso si el brazo del controlador se mantiene en la posición de avance. Cuando la pluma retroceda a su posición normal, y el interruptor de límite esté despejado, el controlador volverá a su función normal.
• Si la pluma se levanta excesivamente o retorna de súbito, más allá de la primera etapa de su interruptor de límite, se activará una segunda etapa y el freno de avance inmediatamente. Si ello ocurre, oprima sin soltar el botón CROWD BRAKES RELEASE (Desactivación de los frenos de avance) y deje que la pluma vuelva a su posición normal. Una vez que se ha restablecido el interruptor de límite de la pluma, desactive el botón CROWD BRAKES RELEASE (Desactivación de los frenos de avance).
4. Manipule ambos controladores para penetrar eficazmente el terraplén. Eleve el cucharón hasta que se llene (consulte la Figura 4-9).
5. Una vez que esté lleno, vuelva el CONTROLADOR DERECHO a su posición normal y retroceda levemente el cucharón, utilizando el CONTROLADOR IZQUIERDO. A medida que el cucharón vaya decantando el terraplén, manipule el CONTROLADOR DERECHO para comenzar el movimiento de giro en la dirección deseada.
! ADVERTENCIALa caída o derrame de la carga puede provocar daños materiales y lesionesgraves o letales. Nunca gire el cucharón cargado o vacío sobre personas, cablesde remolque, aparatos eléctricos u otros equipos. Evite los movimientosrepentinos que puedan provocar el volcamiento de la carga. Establezca unmétodo para cargar las unidades de transporte a fin de evitar el volcamiento dela cubeta cargada sobre cabinas, personas o equipos.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 19 -
OPERACIÓN
Fase giratoria
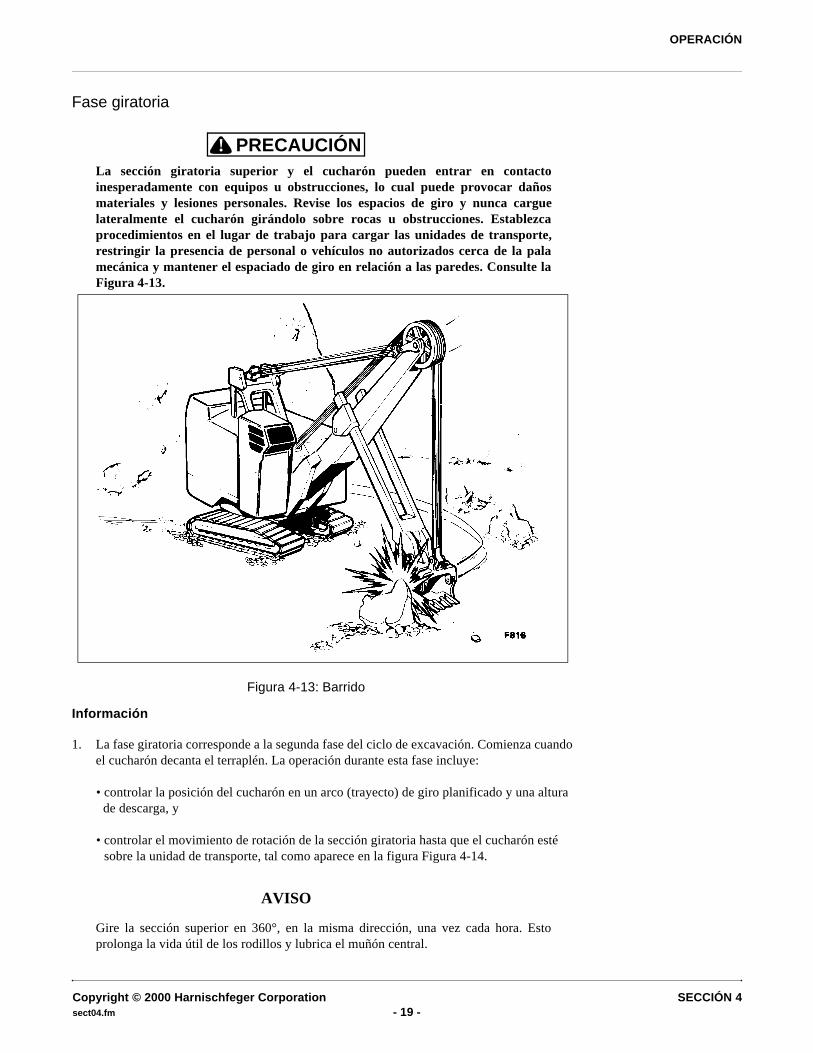
! DANGERPRECAUCIÓNLa sección giratoria superior y el cucharón pueden entrar en contactoinesperadamente con equipos u obstrucciones, lo cual puede provocar dañosmateriales y lesiones personales. Revise los espacios de giro y nunca carguelateralmente el cucharón girándolo sobre rocas u obstrucciones. Establezcaprocedimientos en el lugar de trabajo para cargar las unidades de transporte,restringir la presencia de personal o vehículos no autorizados cerca de la palamecánica y mantener el espaciado de giro en relación a las paredes. Consulte laFigura 4-13.
Figura 4-13: Barrido
Información
1. La fase giratoria corresponde a la segunda fase del ciclo de excavación. Comienza cuando el cucharón decanta el terraplén. La operación durante esta fase incluye:
• controlar la posición del cucharón en un arco (trayecto) de giro planificado y una altura de descarga, y
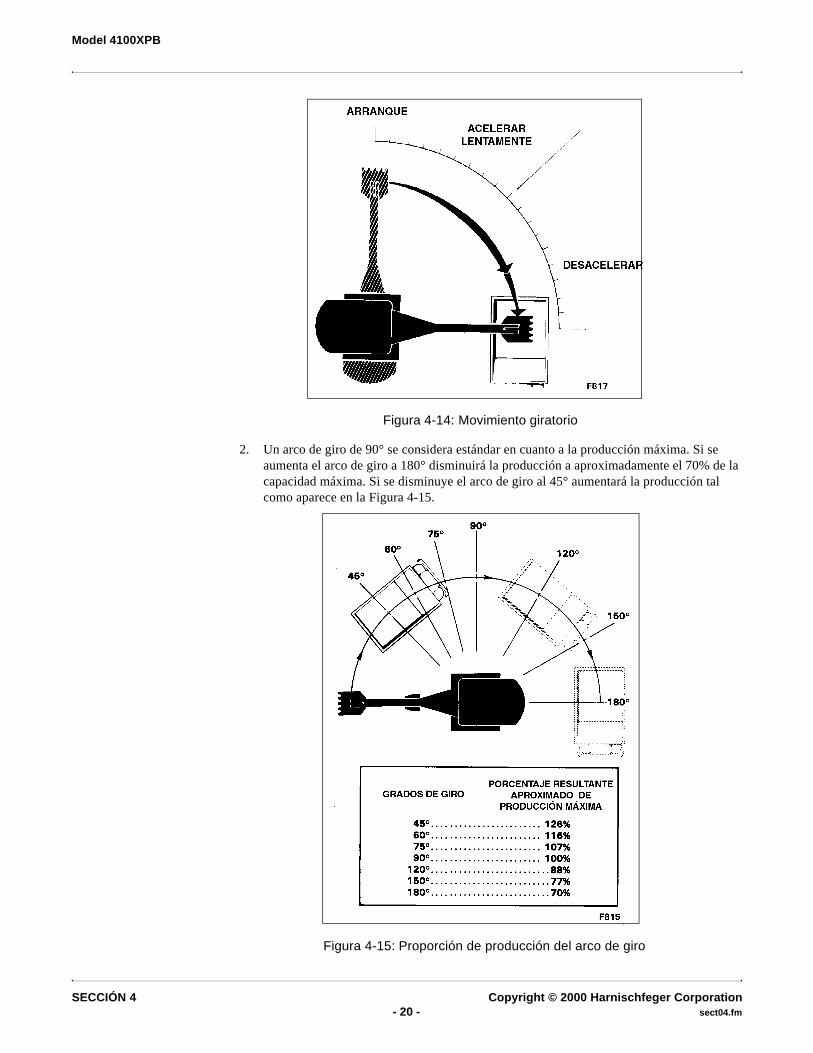
• controlar el movimiento de rotación de la sección giratoria hasta que el cucharón esté sobre la unidad de transporte, tal como aparece en la figura Figura 4-14.
AVISO
Gire la sección superior en 360°, en la misma dirección, una vez cada hora. Estoprolonga la vida útil de los rodillos y lubrica el muñón central.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 20 - sect04.fm
Figura 4-14: Movimiento giratorio
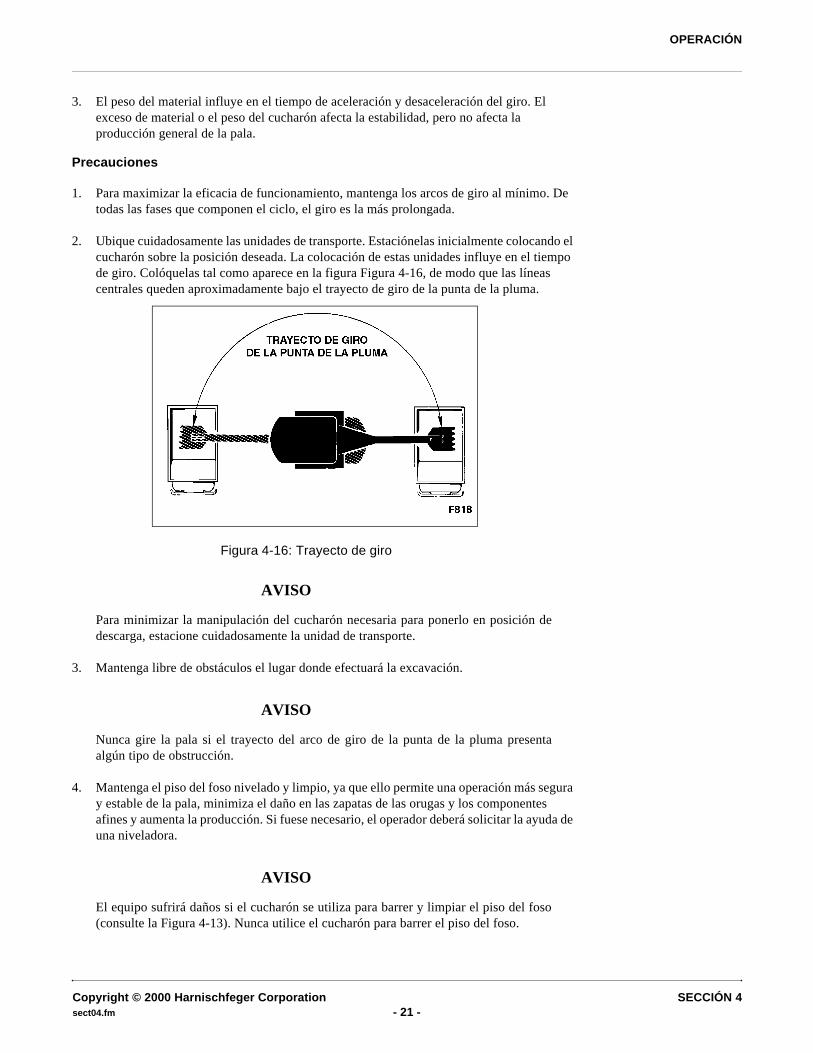
2. Un arco de giro de 90° se considera estándar en cuanto a la producción máxima. Si se aumenta el arco de giro a 180° disminuirá la producción a aproximadamente el 70% de la capacidad máxima. Si se disminuye el arco de giro al 45° aumentará la producción tal como aparece en la Figura 4-15.
Figura 4-15: Proporción de producción del arco de giro
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 21 -
OPERACIÓN
3. El peso del material influye en el tiempo de aceleración y desaceleración del giro. El exceso de material o el peso del cucharón afecta la estabilidad, pero no afecta la producción general de la pala.
Precauciones
1. Para maximizar la eficacia de funcionamiento, mantenga los arcos de giro al mínimo. De todas las fases que componen el ciclo, el giro es la más prolongada.
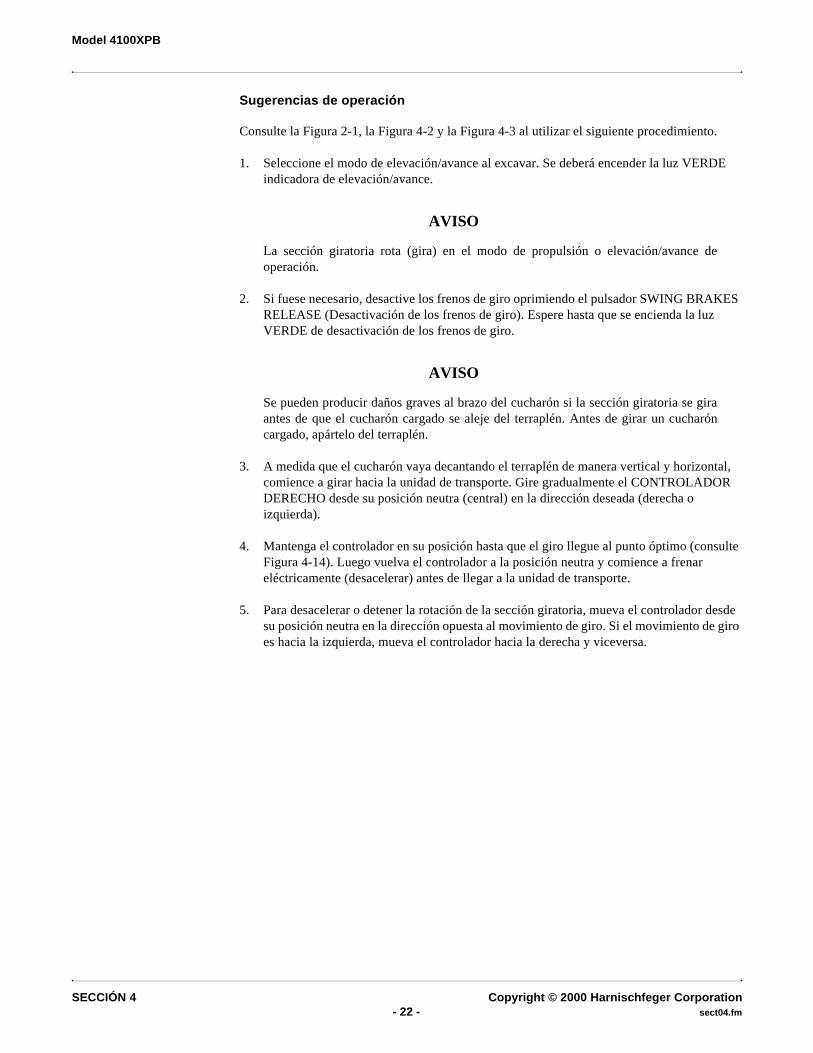
2. Ubique cuidadosamente las unidades de transporte. Estaciónelas inicialmente colocando el cucharón sobre la posición deseada. La colocación de estas unidades influye en el tiempo de giro. Colóquelas tal como aparece en la figura Figura 4-16, de modo que las líneas centrales queden aproximadamente bajo el trayecto de giro de la punta de la pluma.
Figura 4-16: Trayecto de giro
AVISO
Para minimizar la manipulación del cucharón necesaria para ponerlo en posición dedescarga, estacione cuidadosamente la unidad de transporte.
3. Mantenga libre de obstáculos el lugar donde efectuará la excavación.
AVISO
Nunca gire la pala si el trayecto del arco de giro de la punta de la pluma presentaalgún tipo de obstrucción.
4. Mantenga el piso del foso nivelado y limpio, ya que ello permite una operación más segura y estable de la pala, minimiza el daño en las zapatas de las orugas y los componentes afines y aumenta la producción. Si fuese necesario, el operador deberá solicitar la ayuda de una niveladora.
AVISO
El equipo sufrirá daños si el cucharón se utiliza para barrer y limpiar el piso del foso(consulte la Figura 4-13). Nunca utilice el cucharón para barrer el piso del foso.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 22 - sect04.fm
Sugerencias de operación
Consulte la Figura 2-1, la Figura 4-2 y la Figura 4-3 al utilizar el siguiente procedimiento.
1. Seleccione el modo de elevación/avance al excavar. Se deberá encender la luz VERDE indicadora de elevación/avance.
AVISO
La sección giratoria rota (gira) en el modo de propulsión o elevación/avance deoperación.
2. Si fuese necesario, desactive los frenos de giro oprimiendo el pulsador SWING BRAKES RELEASE (Desactivación de los frenos de giro). Espere hasta que se encienda la luz VERDE de desactivación de los frenos de giro.
AVISO
Se pueden producir daños graves al brazo del cucharón si la sección giratoria se giraantes de que el cucharón cargado se aleje del terraplén. Antes de girar un cucharóncargado, apártelo del terraplén.
3. A medida que el cucharón vaya decantando el terraplén de manera vertical y horizontal, comience a girar hacia la unidad de transporte. Gire gradualmente el CONTROLADOR DERECHO desde su posición neutra (central) en la dirección deseada (derecha o izquierda).
4. Mantenga el controlador en su posición hasta que el giro llegue al punto óptimo (consulte Figura 4-14). Luego vuelva el controlador a la posición neutra y comience a frenar eléctricamente (desacelerar) antes de llegar a la unidad de transporte.
5. Para desacelerar o detener la rotación de la sección giratoria, mueva el controlador desde su posición neutra en la dirección opuesta al movimiento de giro. Si el movimiento de giro es hacia la izquierda, mueva el controlador hacia la derecha y viceversa.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 23 -
OPERACIÓN
Fase de descarga
Información
La fase de descarga comienza antes de que el cucharón cargado pase sobre el extremo de la unidad de transporte y finaliza a medida que el movimiento giratorio se detiene y se dirige en reversa.
Sugerencias de operación
Consulte la Figura 2-1, la Figura 4-2 y la Figura 4-3 al utilizar el siguiente procedimiento:
1. Cuando el cucharón esté sobre la caja de la unidad de transporte, mueva el CONTROLADOR IZQUIERDO a la derecha. Ello elimina el huelgo en el cable de apertura del cucharón y abre este último. Con el objeto de minimizar el impacto en la unidad de transporte, fije la altura del cucharón en un nivel tal que el giro de la compuerta apenas pase cerca de la parte superior de la carga. Sincronice la acción de modo que se desenganche el pestillo y se abra la compuerta del cucharón justo después de que este último pase por encima del extremo de la unidad de transporte (consulte la Figura 4-14).
AVISO
Desactive el CONTROLADOR IZQUIERDO y deje que vuelva a su posición neutra(central) inmediatamente después de que la compuerta se abra. Si se mantiene elCONTROLADOR IZQUIERDO en la posición de “apertura del cucharón” mástiempo que el necesario disminuirá la vida útil del motor y los resistores de aperturadel cucharón.
2. Mueva el CONTROLADOR DERECHO en la dirección contraria al movimiento de giro para desacelerar, detener o revertir el giro vigente antes de que el cucharón pase por sobre la plataforma de la unidad de transporte.
Fase de retorno
Información
La fase de retorno incluye el giro de la sección superior nuevamente al lugar de excavación, y el descenso y desactivación del conjunto de apertura del cucharón de modo que cuando se baje el cucharón, su compuerta se cerrará y se enganchará el pestillo.
Sugerencias de operación
Consulte la Figura 2-1, la Figura 4-2 y la Figura 4-3 al utilizar el siguiente procedimiento:
1. Vuelva el cucharón al lugar de excavación a la máxima velocidad nominal bajando el cucharón simultáneamente a la posición de excavación.
2. Mueva el CONTROLADOR DERECHO para desplazar la sección giratoria en la dirección deseada y al mismo tiempo muévalo hacia adelante para bajar el cucharón a la posición de excavación.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 24 - sect04.fm
3. Centre el CONTROLADOR IZQUIERDO para permitir que se enganche el pestillo del cucharón.
4. Mueva el CONTROLADOR IZQUIERDO hacia atrás y adelante para retroceder o avanzar el cucharón hacia la posición de excavación.
5. Repita el ciclo de excavación según sea necesario.
SUGERENCIAS DE OPERACIÓN PARA LA PROPULSIÓN
! DANGERPRECAUCIÓNEl desplazamiento inesperado de la pala puede causar situaciones peligrosas quepueden provocar daños materiales y lesiones graves o letales. Antes de reubicarla pala utilice a una persona guía, preste atención a las personas, equipos,inclinación de la pendiente y soporte del terreno alrededor o cerca de la pala y surecorrido.
1. Tenga presente hacia dónde se dirige la pala mecánica.
2. Cerciórese de que la superficie de impulsión esté libre de puntos blandos, zonas disparejas y rocas que podrían dañar las zapatas de las orugas.
AVISO
RECUERDE: la pendiente máxima cuesta arriba o cuesta abajo para el movimientode propulsión es de 20% y para la propulsión transversal es de 10%. No serecomienda el movimiento de propulsión en reversa cuesta arriba ni cuesta abajo.Además, la propulsión en reversa en superficies niveladas se debe mantener almínimo debido a la mayor tensión en los componentes de las orugas.
3. Establezca una comunicación fluída con el personal de tierra y un código de señales para las operaciones planificadas.
4. Si fuese necesario, lleve a cabo la revisión del PREARRANQUE, Paso 3. en la página 3-1, y los procedimientos de ARRANQUE que aparecen en la página 3-6.
5. Alínee la sección giratoria con la pluma sobre la parte delantera del chasis.
AVISO
Esto permite que la pala se desplace en la misma dirección que el movimiento de loscontroladores. Si la cabina del operador no queda alineada con la parte delantera delchasis, considere cuál será la dirección de la pala en relación con el movimiento delcontrolador.
6. Active los frenos de giro.
Copyright © 2000 Harnischfeger Corporation SECCIÓN 4sect04.fm - 25 -
OPERACIÓN
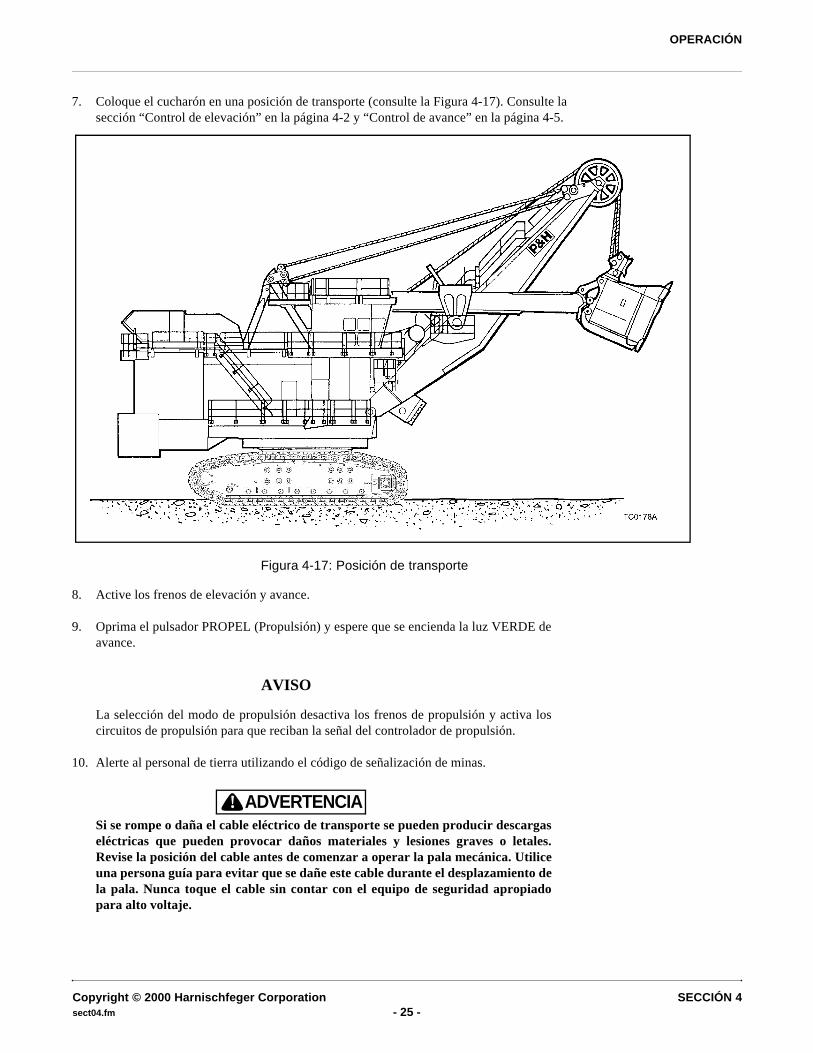
7. Coloque el cucharón en una posición de transporte (consulte la Figura 4-17). Consulte la sección “Control de elevación” en la página 4-2 y “Control de avance” en la página 4-5.
Figura 4-17: Posición de transporte
8. Active los frenos de elevación y avance.
9. Oprima el pulsador PROPEL (Propulsión) y espere que se encienda la luz VERDE de avance.
AVISO
La selección del modo de propulsión desactiva los frenos de propulsión y activa loscircuitos de propulsión para que reciban la señal del controlador de propulsión.
10. Alerte al personal de tierra utilizando el código de señalización de minas.
! ADVERTENCIASi se rompe o daña el cable eléctrico de transporte se pueden producir descargaseléctricas que pueden provocar daños materiales y lesiones graves o letales.Revise la posición del cable antes de comenzar a operar la pala mecánica. Utiliceuna persona guía para evitar que se dañe este cable durante el desplazamiento dela pala. Nunca toque el cable sin contar con el equipo de seguridad apropiadopara alto voltaje.
Model 4100XPB
SECCIÓN 4 Copyright © 2000 Harnischfeger Corporation- 26 - sect04.fm
11. Mueva los CONTROLADORES en la dirección de la trayectoria deseada. La dirección de propulsión guarda relación con el movimiento de las palancas de control tal como se describe en la sección de control de impulsión en la página 4-7.
AVISO
La velocidad de la pala es proporcional al desplazamiento del controlador desde suposición vertical (neutra). El movimiento del controlador debe ser uniforme y se debeefectuar una leve pausa en la posición neutra al cambiar de adelante hacia atrás yviceversa.
12. Para detener el movimiento de propulsión de la máquina, coloque el o los CONTROLADORES en la posición vertical.
AVISO
Los frenos de propulsión se deben usar sólo para fines de retención (estacionamiento)y no se deben enganchar mientras la máquina esté en movimiento. La parada deemergencia para evitar daños materiales y lesiones personales o letales se efectúaoprimiendo el pulsador STOP (Parada) en la consola de control.
13. Cuando la pala se detenga, oprima el pulsador HOIST CROWD (Elevación/Avance) para activar los frenos de propulsión. La pala está lista para el modo de excavación.
14. Si se utilizará la pala para cavar, indique al personal de tierra que la pala va a comenzar a operar. Espere la señal de que todo está en orden por parte del personal de tierra antes de girar la pala o comenzar a cavar.
15. Si la pala se va a detener, consulte los PROCEDIMIENTOS DE DETENCIÓN de la pala mecánica en la página 3-9.