
observadores.pptx
59
/59 Sistemas dinámicos Realimentac ión de la salida 1
-
Upload
cristian-andrade -
Category
Documents
-
view
219 -
download
0
Transcript of observadores.pptx
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 1/59
/59
Sistemas dinámicos
Realimentación de la salida
1
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 2/59
/59
Contenido
1. El estimador de estado
2. El observador a lazo abierto
3. El observador a lazo cerrado
4. Diseño del observador 5. El observador de orden reducido
2
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 3/59
/59
EL ESTIMADOR DE ESTADO
3
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 4/59
/59
El observador de estado
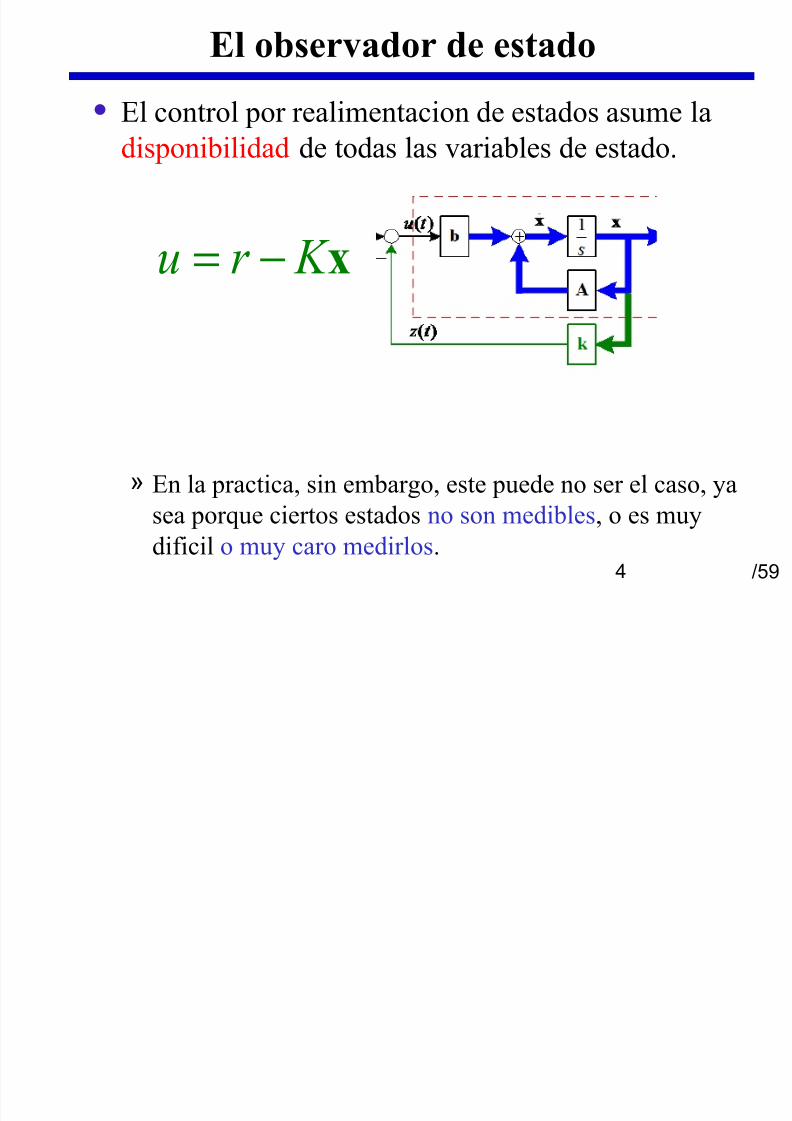
El control por realimentacion de estados asume la
disponibilidad de todas las variables de estado.
» En la practica, sin embargo, este puede no ser el caso, a
sea por!ue ciertos estados no son medibles, o es mu
di"icil o mu caro medirlos.4
u r K = − x
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 5/59
/59
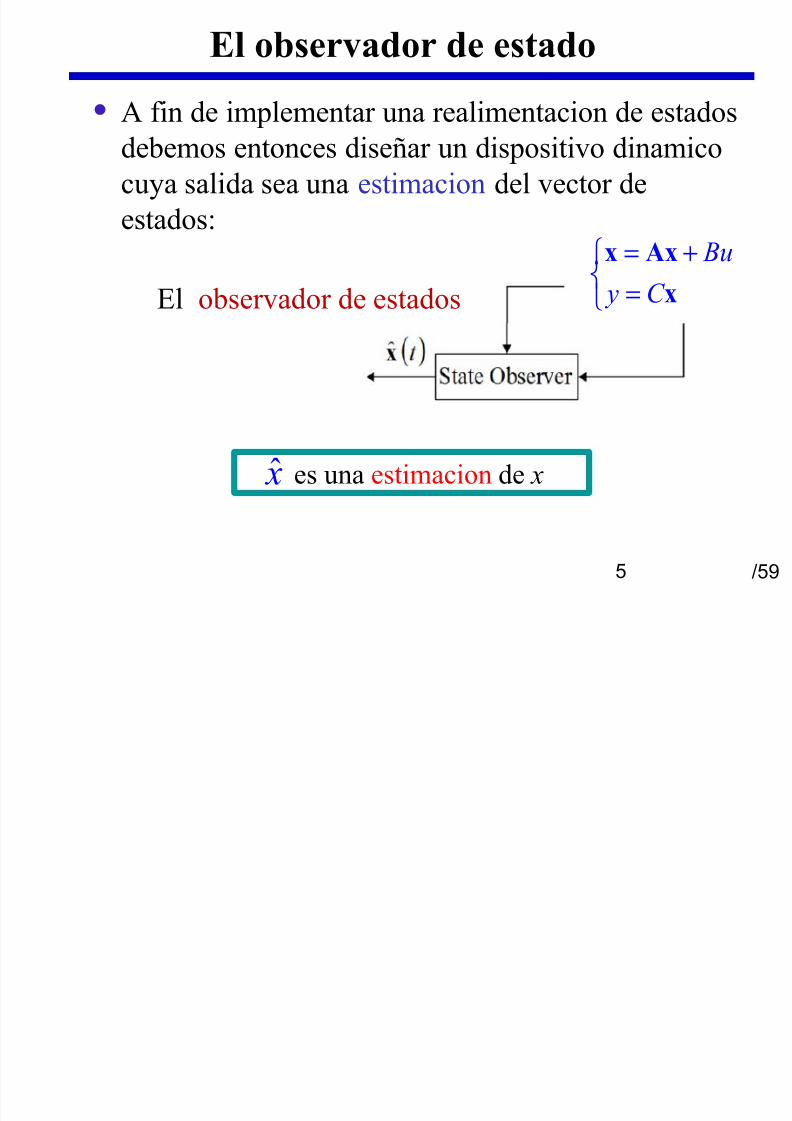
El observador de estado
# "in de implementar una realimentacion de estados
debemos entonces diseñar un dispositivo dinamico
cua salida sea una estimacion del vector de
estados$
5
El observador de estados
es una estimacion de x % x
Bu
y C
= +
=
x Ax
x
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 6/59
/59
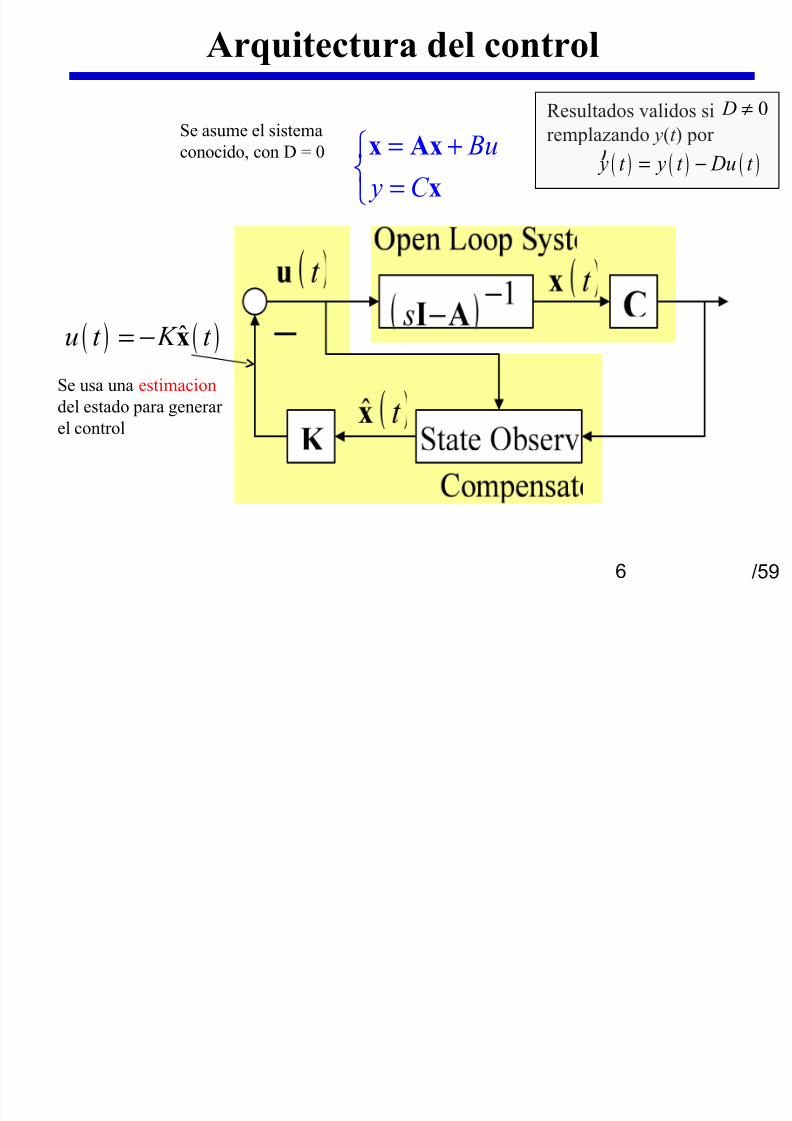
Arquitectura del control
6
&e usa una estimacion
del estado para generarel control
&e asume el sistemaconocido, con D ' (
Resultados validos si
remplazando y)t * por
( ) ( )%u t K t = − x
Bu
y C = +=
x Ax
x
( ) ( ) ( ) y t y t Du t = −
( D ≠
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 7/59
/59
EL OBSERADOR A LA!OABIERTO
7
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 8/59
/59
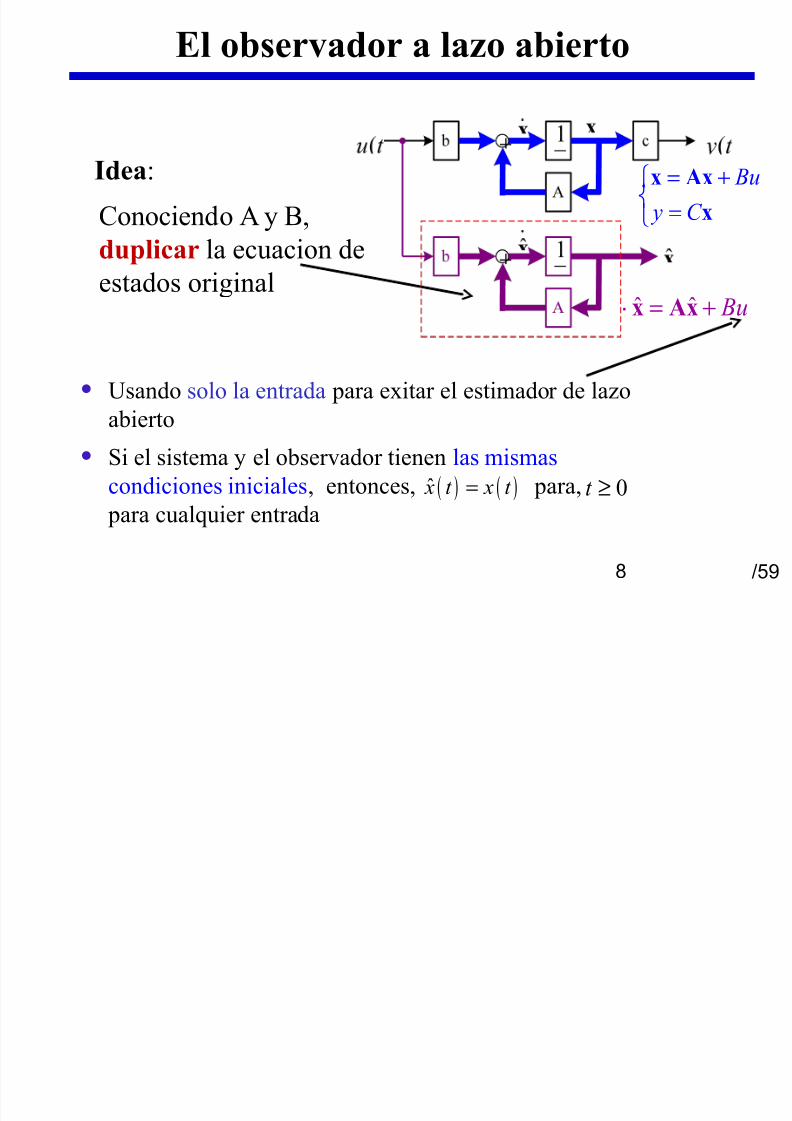
El observador a la"o abierto
+sando solo la entrada para eitar el estimador de lazo
abierto
&i el sistema el observador tienen las mismas
condiciones iniciales, entonces, para,
para cual!uier entrada
8
-onociendo # ,
du#licar la ecuacion de
estados original
Idea$
(≥t ( ) ( )% x t x t =
Bu
y C
= +
=
x Ax
x
% % Bu= +x Ax
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 9/59
/59
Calculo del estado inicial
&i el sistema es observable, su estado inicial x )(* puedeser calculado de u y en cual!uier intervalo de tiempo, por e/emplo, 0(, t 1.
9
-omo allar el estado inicial x )(* del sistema para usarlo en el
observador
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 10/59
/59
Calculo del estado inicial
asos a implementar en el observador$
1. -alcular el estado inicial x )(*
2. -alcular el estado en t 2 acer
10
Entonces$
para todo t ≥ t 2.
algun problema
%) * ) *= x t x t
2 2%) * ) *= x t x t
2 1t t ≥

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 11/59
/59
Dinamica del error
6a ecuacion del error de estimacion esta dada por
&i A es 7ur8itz, entonces 9 ( cuando t 9 :.
11
or lo tanto, la dinamica del error esta completamente
determinada por la dinamica en lazo abierto delsistema
)los valores propios de la matriz A*.
algun problema
( ) ( ) ( ) ( )% ( At x t x t x t e x− = =% %
( ) x t %
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 12/59
/59
Limitaciones del observador a la"o abierto
El observador en lazo abierto tiene las siguientes
importantes desventa/as$
#un con la matriz A estable, esta dinamica pudiera sermu lenta.
&i A tiene autovalores con parte real #ositiva,
» entonces cual!uier pe!ueña di"erencia entre para algun t (, causada por un disturbio o una imper"eccion en
la estimacion del estado inicial, ara !ue$
12
crezca con el tiempo
*) (t x *)%(t x
( ) ( )%− x t x t
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 13/59
/59
EL OBSERADOR A LA!OCERRADO
13
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 14/59
/59
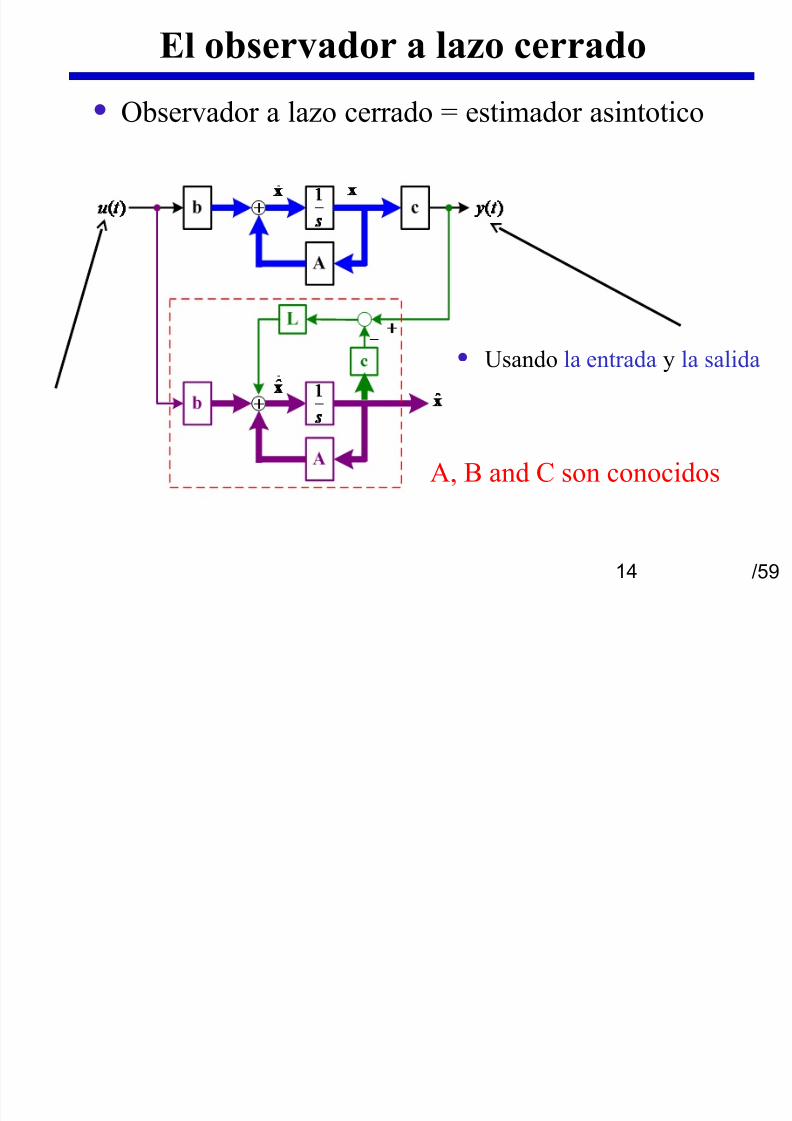
El observador a la"o cerrado
;bservador a lazo cerrado ' estimador asintotico
14
#, and - son conocidos
+sando la entrada la salida
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 15/59
/59
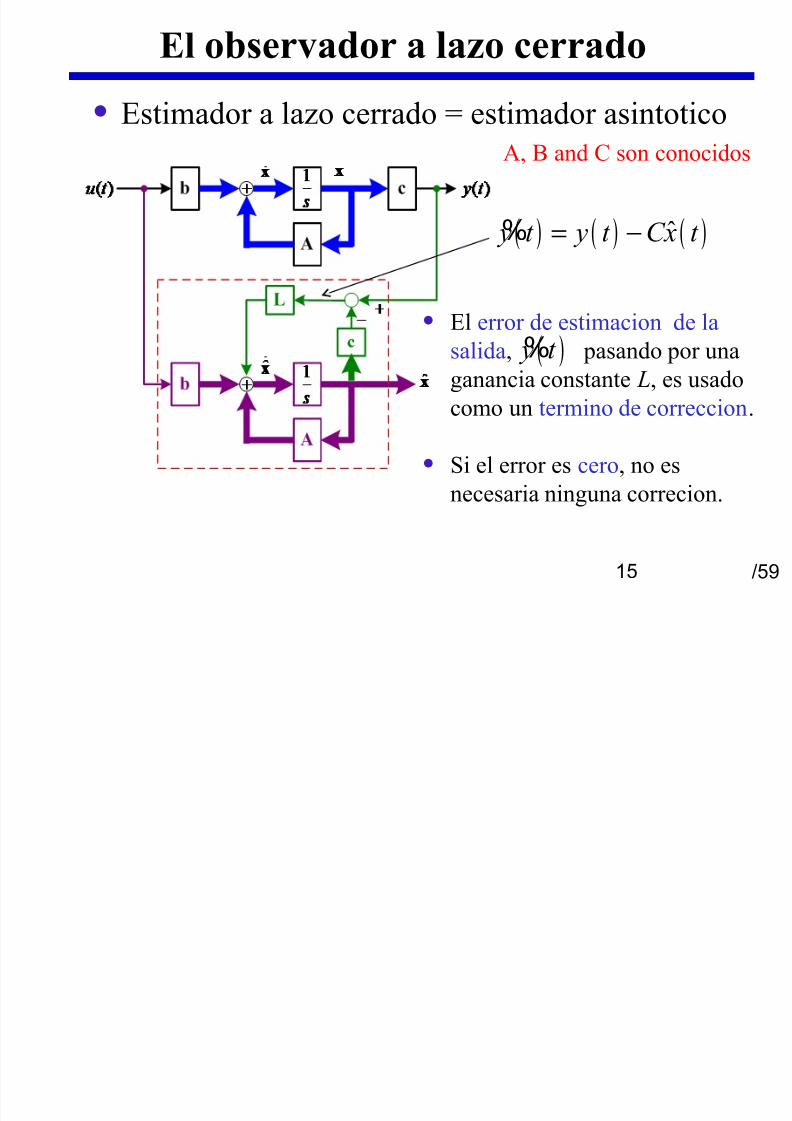
El observador a la"o cerrado
Estimador a lazo cerrado ' estimador asintotico
15
#, and - son conocidos
El error de estimacion de la
salida, pasando por una
ganancia constante L, es usado
como un termino de correccion.
&i el error es cero, no es
necesaria ninguna correcion.
( ) ( ) ( )% y t y t Cx t = −%
( ) y t %
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 16/59
/59
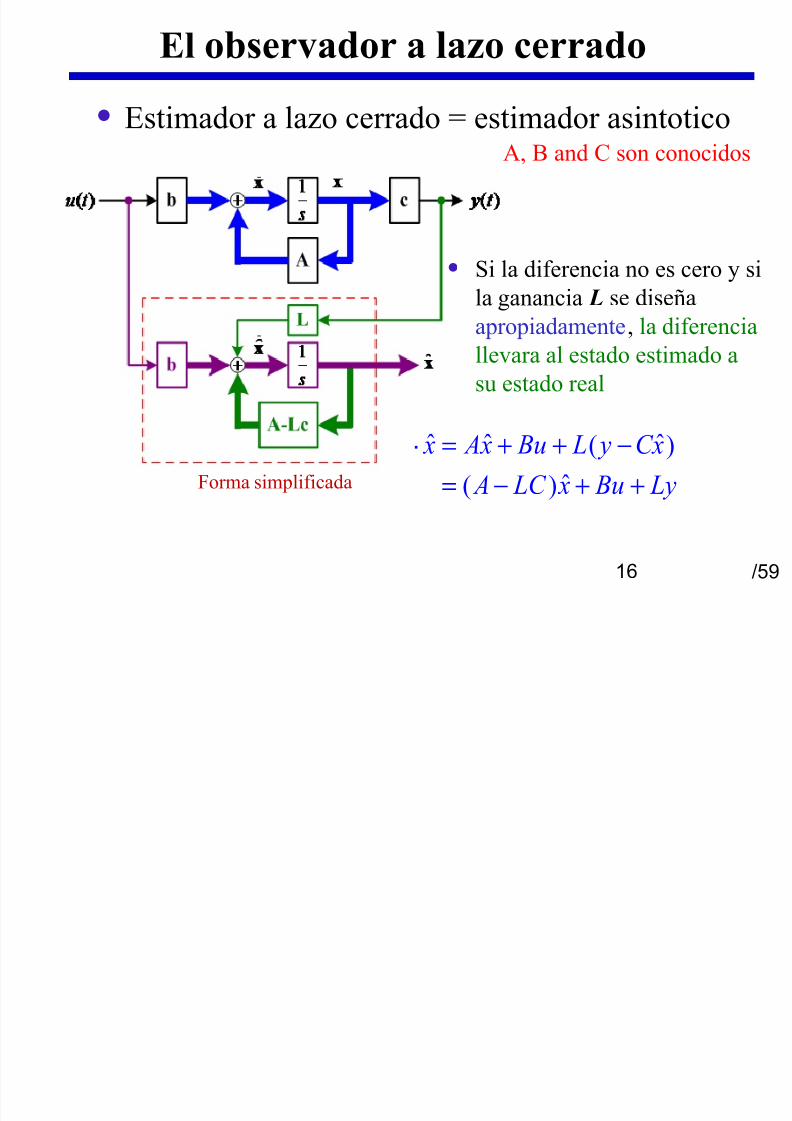
El observador a la"o cerrado
Estimador a lazo cerrado ' estimador asintotico
16
<orma simpli"icada
&i la di"erencia no es cero sila ganancia L se diseña
apropiadamente, la di"erencia
llevara al estado estimado a
su estado real
#, and - son conocidos
% % %) *
%) *
x Ax Bu L y Cx
A LC x Bu Ly
= + + −
= − + +
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 17/59
/59
El error de estimacion
El estado verdadero$
El estado de estimado$
El error de Estimacion$
6a dinamica del error
&i todos los autovalores de ) A − LC * pueden ser
asignados arbitrariamente, podemos controlar la
velocidad con !ue el error de estimacion se aproima acero
17
=o a necesidad de calcular el estado inicial de
la ecuación de estado original.
% %) * A LC Bu Ly= − + +x x
%$ x = −x x
> A Bu y C = + =x x x
% ) * x A LC x= − = −x x
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 18/59
/59
Teorema
?eorema de la asignacion de #utovalores en
observadores
-onsidere el par ) A, C *
?odos los autovalores de ) A − LC * pueden asignarsearbitrariamente seleccionando un vector real L si solo
si ) A, C * es observable.
18
% ) * x A LC x= − = −x x

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 19/59
/59
Teorema
?eorema de la signacion de #utovalores en observadores
-onsidere el par ) A, C *. ?odos los autovalores de ) A − LC * pueden asignarse arbitrariamente seleccionando un vector real L
si solo si ) A, C * es observable.
19
$rueba%
Recurriendo a la dualidad controlabilidad@observabilidad, el par ) A, C * es observable si solo si ) AT , C T * es controlable.
&i ) AT , C T * es controlable todos los autovalores de ) AT − C T K *
pueden asignarse arbitrariamente mediante una eleccion
adecuada de K .
6a transpuesta de ) AT − C T K * es ) A − K T C * por lo tanto,
acemos L ' K T .
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 20/59
/59
Teorema
?eorema de la signacion de #utovalores en observadores
-onsidere el par ) A, C *. ?odos los autovalores de ) A − LC * pueden asignarse arbitrariamente seleccionando un vector real L
si solo si ) A, C * es observable.
20
&i ) AT , C T * es controlable todos los autovalores de ) AT − C T K *
pueden asignarse arbitrariamente mediante una eleccion
adecuada de K .
6a transpuesta de ) AT − C T K * es ) A − K T C * por lo tanto,
acemos L ' K T .
El mismo procedimiento usado para calcular la matriz de realimentacion
de estados K sirven para calcular la matriz L del observador.
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 21/59
/59
$rocedimiento de dise&o del observador
;btener el par ) AT , C T *. &i el par es controlable
continuar
Elegir los valores propios deseados del observador
en lazo cerrado
+sando ) AT , C T *, calcular la matriz de realimentacion
K mediante el procedimiento para la asignacion de
autovalores, via la "orma canonica.
;btener L ' K T
21
con la "uncion K = place) AT , C T ,P * de
A#?6#
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 22/59
/59
REALIME'TACIO' DE LASALIDA
22
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 23/59
/59
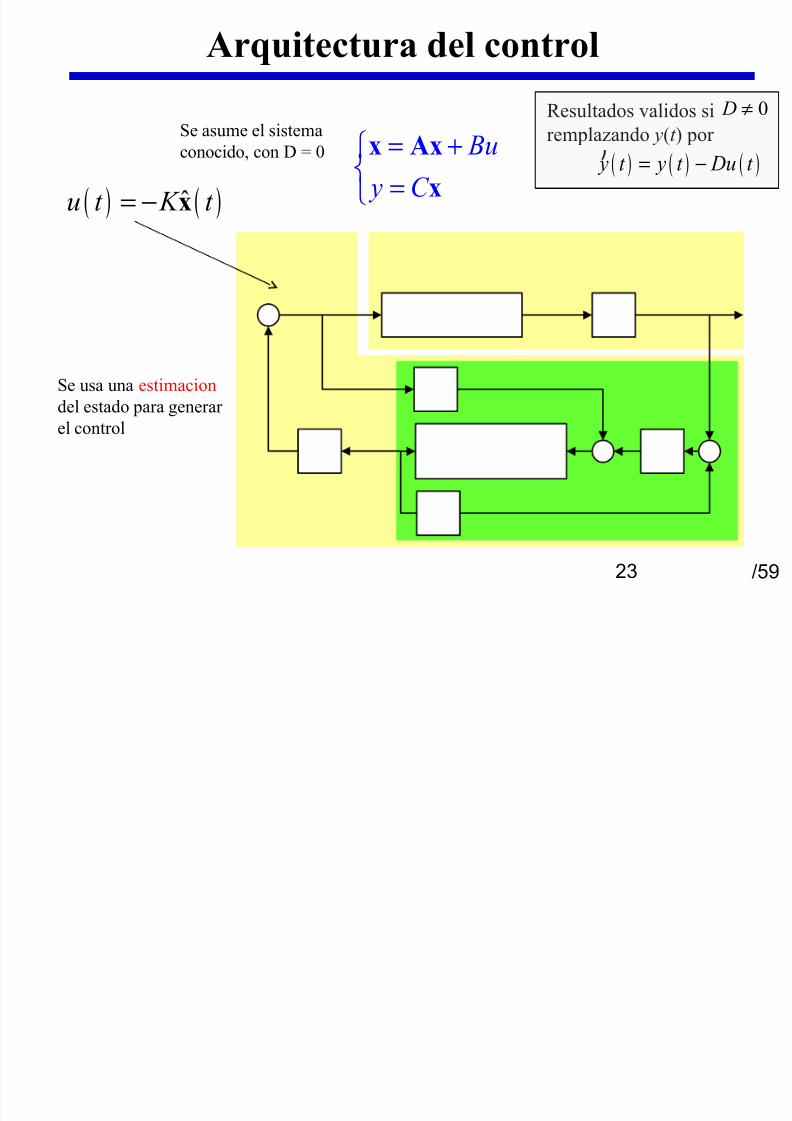
Arquitectura del control
23
&e usa una estimacion
del estado para generar
el control
&e asume el sistema
conocido, con D ' (
Resultados validos si
remplazando y)t * por
( ) ( )%u t K t = − x
Bu
y C = +=
x Ax
x ( ) ( ) ( ) y t y t Du t = −
( D ≠
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 24/59
/59
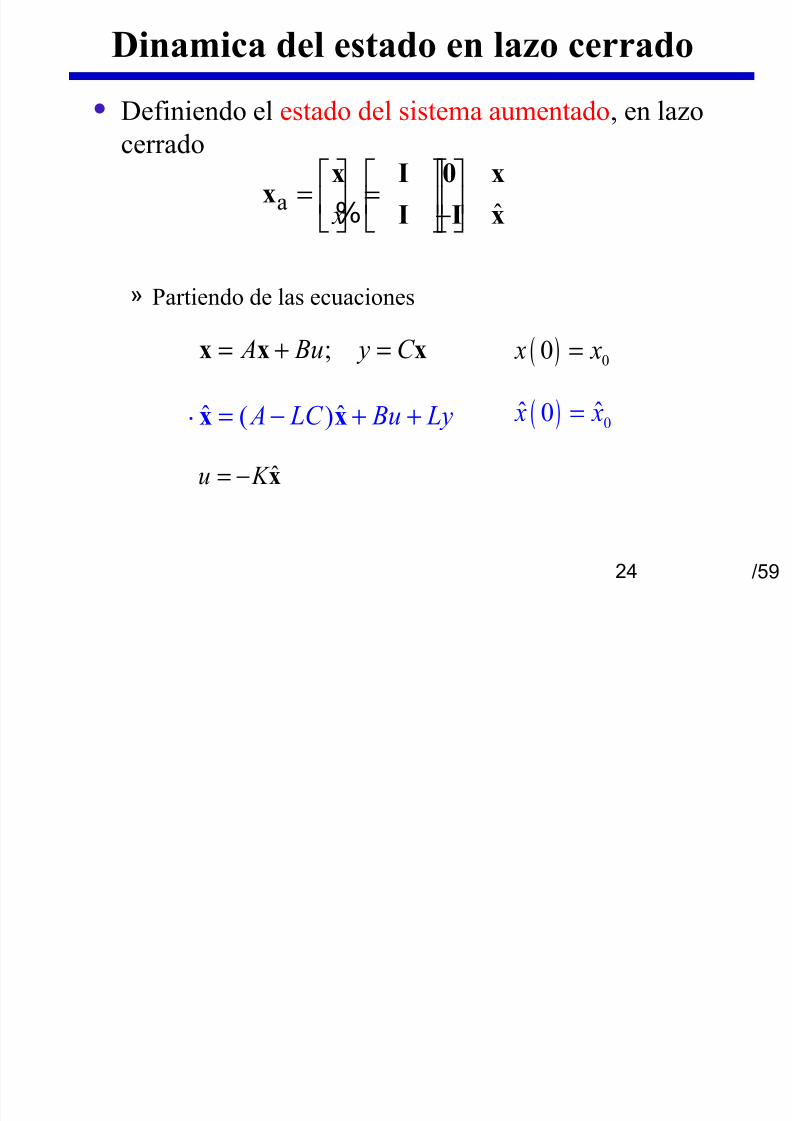
Dinamica del estado en la"o cerrado
De"iniendo el estado del sistema aumentado, en lazo
cerrado
» artiendo de las ecuaciones
24
%u K = − x
% %) * A LC Bu Ly= − + +x x
> A Bu y C = + =x x x
a% x
= = −
x I ( xx
I I x%
( ) (% %( x x=
( ) (( x x=

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 25/59
/59
Dinamica del estado en la"o cerrado
» Dinamica del estado, en lazo cerrado
» Dinamica del error
25
% x Ax BK = − x&
% Ax BK BKx BKx− += − x ( ) ( )% A BK x BK x= − + − x
( ) ( ) A BK x t BKx= − +
%u K = − x
% ) * x A LC x= − = −x x

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 26/59
/59
Dinamica del estado en la"o cerrado
6a dinamica del sistema aumentado$
26
6os autovalores del sistema realimentado son la union de los
autovalores de
% ) * x A LC x= − = −x x
( ) ( )= − +& x A BK x t BKx
{
( ) (
( (
(%
a
a a A BK BK x x
A LC x x x− = = − −
x
x x(
&%
A BK A LC − −
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 27/59
/59
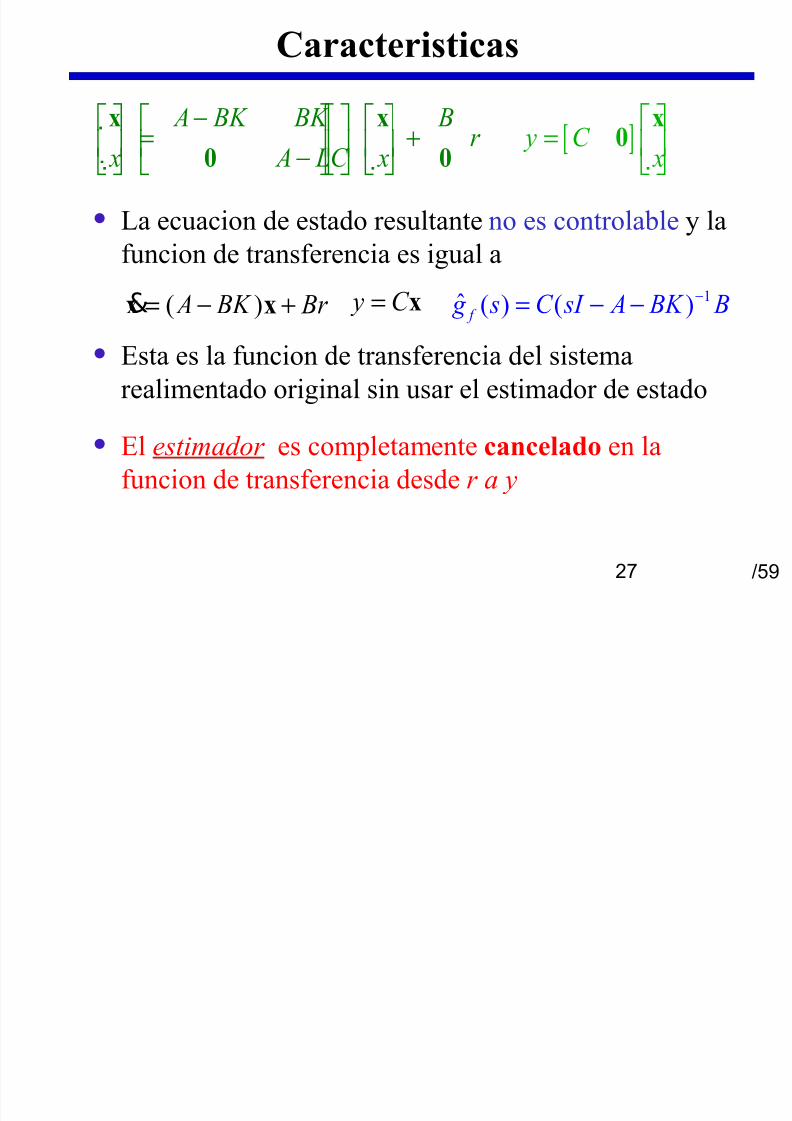
Caracteristicas
6a ecuacion de estado resultante no es controlable la
"uncion de trans"erencia es igual a
Esta es la "uncion de trans"erencia del sistema
realimentado original sin usar el estimador de estado
El estimador es completamente cancelado en la
"uncion de trans"erencia desde r a y
27
A BK BK B
r x A LC x
−
= + −
x x
( (
[ ] y C x
=
x
(
1% ) * ) * f g s C sI A BK B−= − − y C = x) * A BK Br = − +x x&
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 28/59
/59
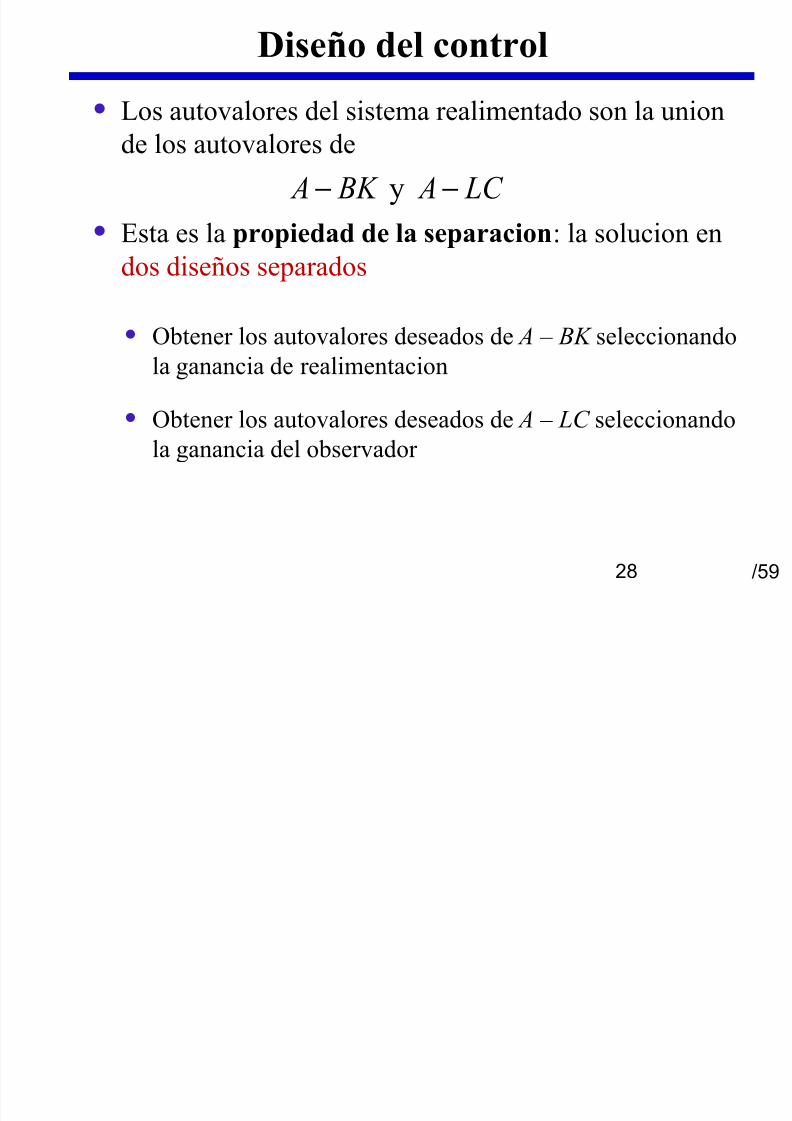
Dise&o del control
6os autovalores del sistema realimentado son la union
de los autovalores de
Esta es la #ro#iedad de la se#aracion$ la solucion en
dos diseños separados
;btener los autovalores deseados de A – BK seleccionando
la ganancia de realimentacion
;btener los autovalores deseados de A – LC seleccionandola ganancia del observador
28
A BK A LC − −
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 29/59
/59
E)em#lo *
29
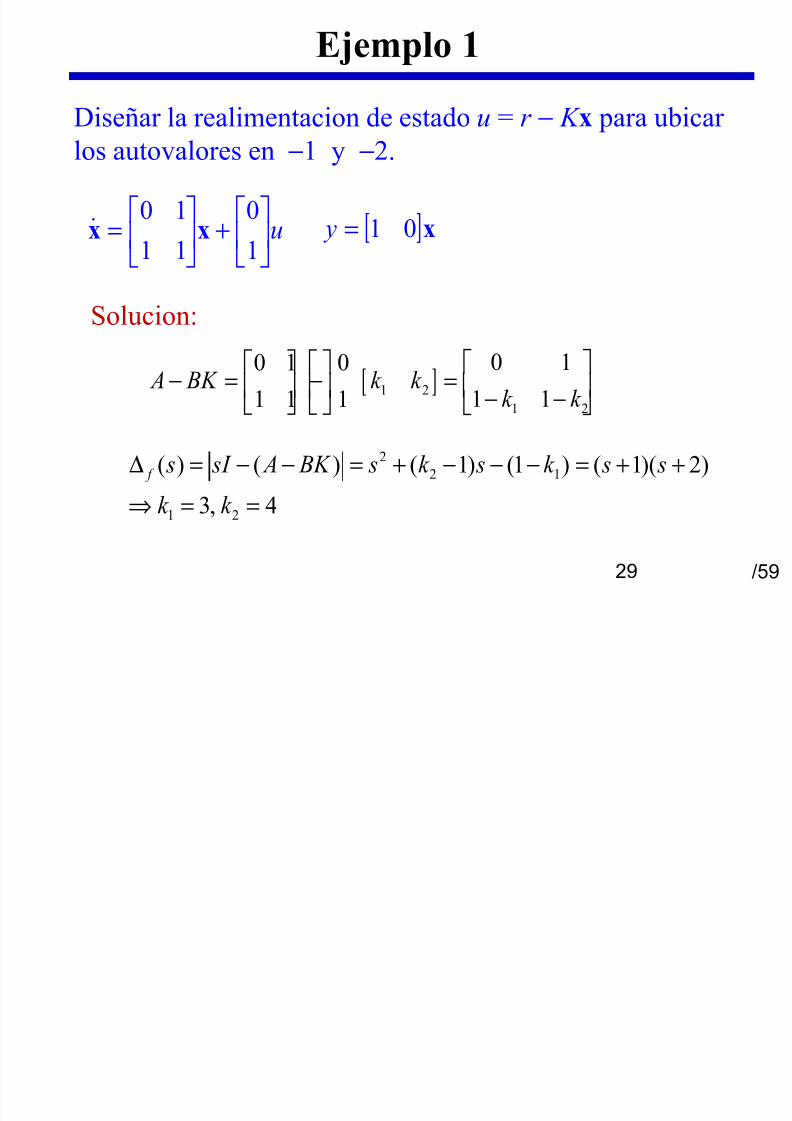
Diseñar la realimentacion de estado u ' r − K x para ubicar
los autovalores en −1 −2.
&olucion$
u
+
=
1
(
11
1(xx [ ]x(1= y
[ ]1 2
1 2
( 1( 1 (
1 11 1 1 A BK k k
k k
− = − = − −
2
2 1
1 2
) * ) * ) 1* )1 * ) 1*) 2*
3, 4
f s sI A BK s k s k s s
k k
∆ = − − = + − − − = + +
⇒ = =
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 30/59
/59
E)em#lo *
30
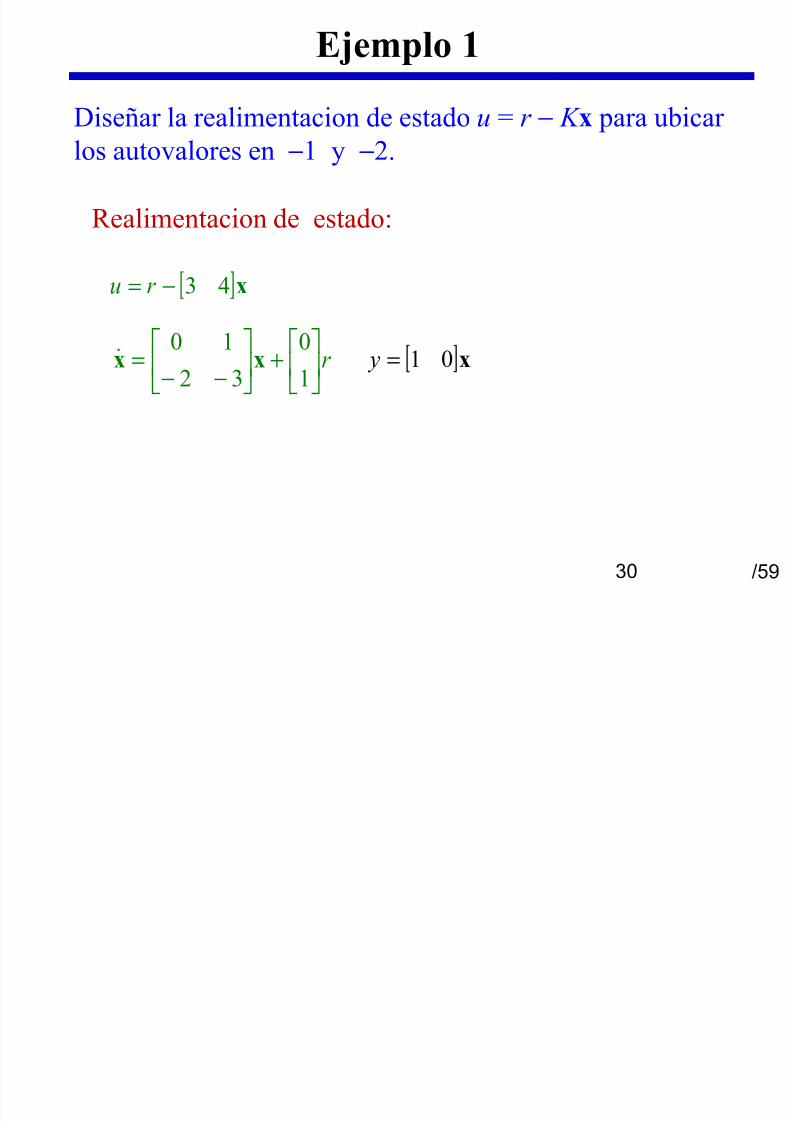
Diseñar la realimentacion de estado u ' r − K x para ubicar
los autovalores en −1 −2.
Realimentacion de estado$
[ ]x43−= r u
r
+
−−=
1
(
32
1(xx [ ]x(1= y
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 31/59
/59
E)em#lo *
31
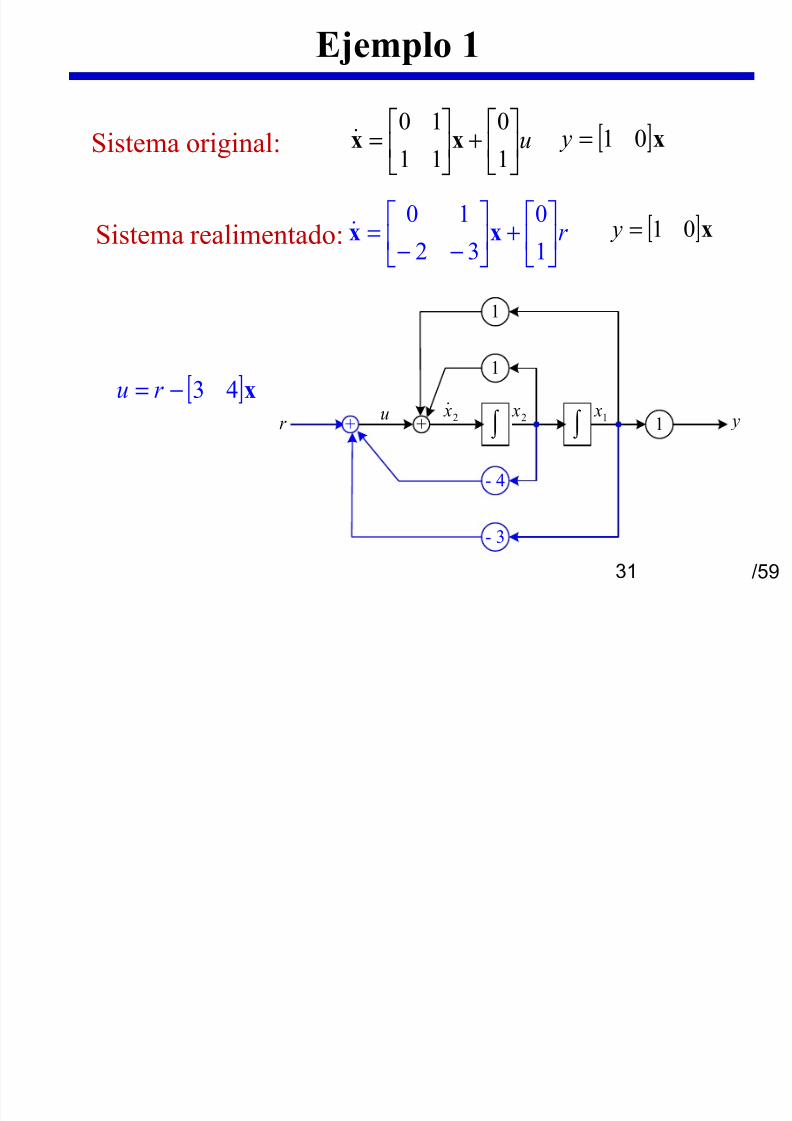
&istema original$
&istema realimentado$
u
+
= 1
(
11
1(
xx [ ]x(1= y
r
+
−−=
1
(
32
1(xx [ ]x(1= y
[ ]x43−= r u
B Br u ∫ ∫ 2 x
2 x 1 x 1 y
1
1
C 4
C 3
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 32/59
/59
E)em#lo *
32
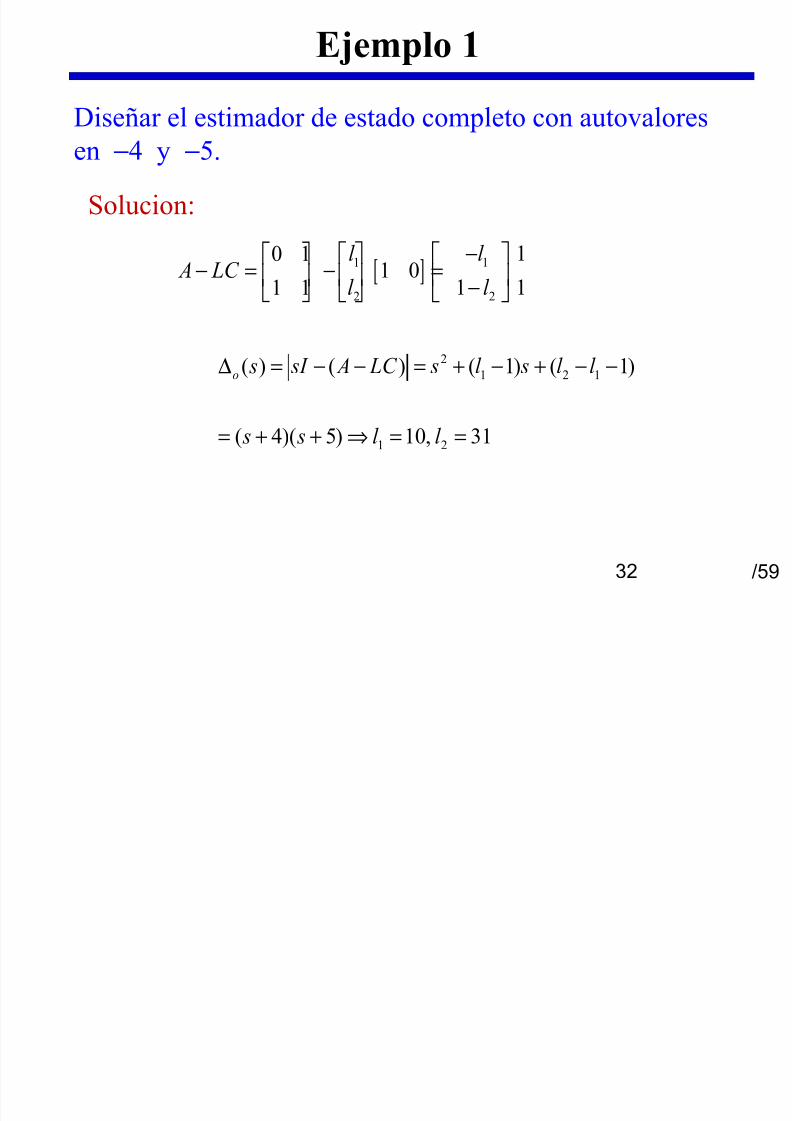
&olucion$
Diseñar el estimador de estado completo con autovalores
en −4 −5.
[ ]
1 1
2 2
1( 1
1 ( 1 11 1
l l
A LC l l
− − = − =
−
2
1 2 1
1 2
) * ) * ) 1* ) 1*
) 4*) 5* 1(, 31
o s sI A LC s l s l l
s s l l
∆ = − − = + − + − −
= + + ⇒ = =
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 33/59
/59
E)em#lo *
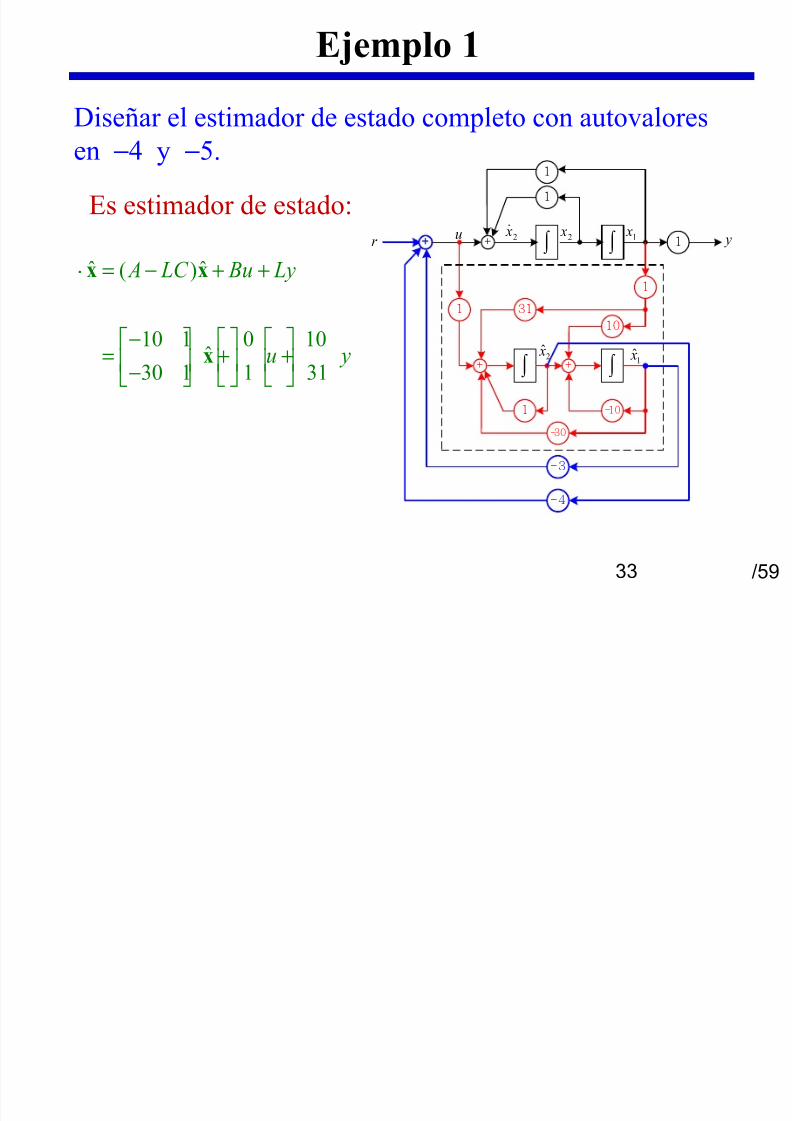
33
Es estimador de estado$
Diseñar el estimador de estado completo con autovalores
en −4 −5.
% %) *
1( 1 ( 1(%
3( 1 1 31
A LC Bu Ly
u y
= − + +
− = + + −
x x
x
+r u
∫ ∫ 2 x 2 x 1 x1 y
1
1
- 3
- 4
1
∫ ∫ ++
10
31
-101
1
-30
1% x2
% x
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 34/59
/59
E)em#lo +
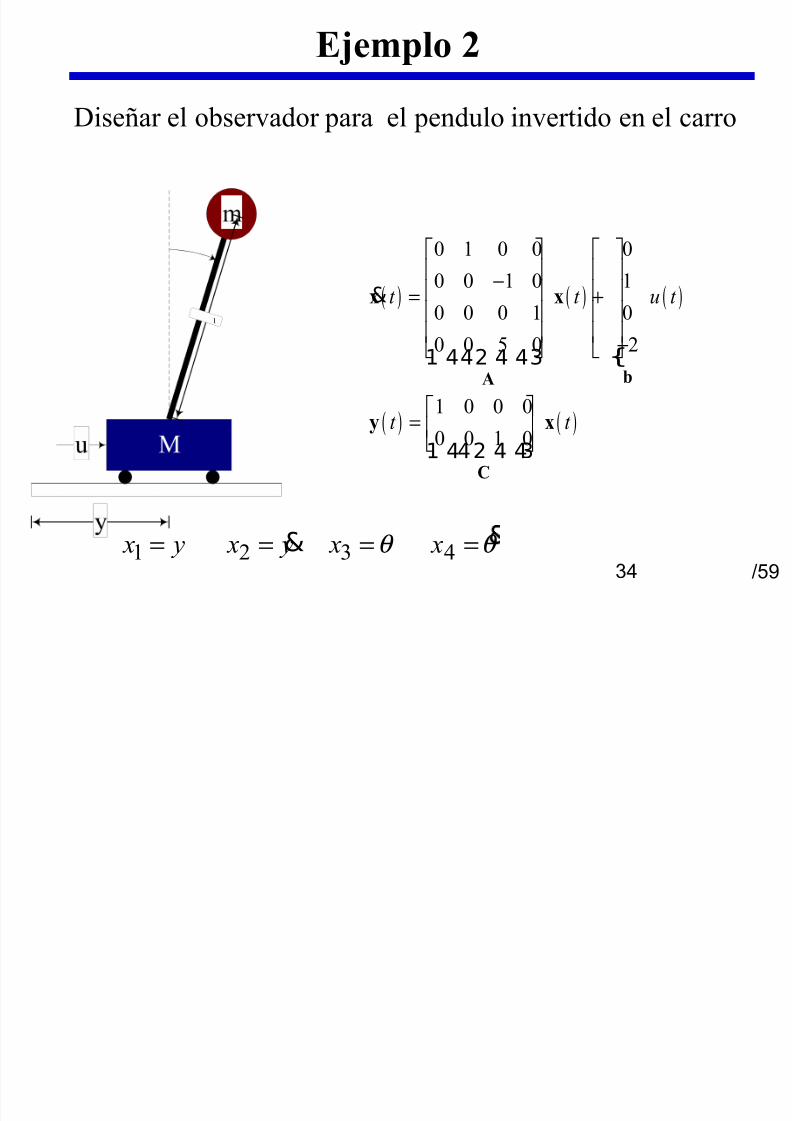
34
Diseñar el observador para el pendulo invertido en el carro
( ) ( )
{
( )
( ) ( )
( 1 ( ( (
( ( 1 ( 1( ( ( 1 (
( ( 5 ( 2
1 ( ( (
( ( 1 (
t t u t
t t
− = + −
=
bA
C
x x
, x
&
1 442 4 43
1 44 2 4 43
1 2 3 4 x y x y x xθ θ = = = =&
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 35/59
/59
E)em#lo +
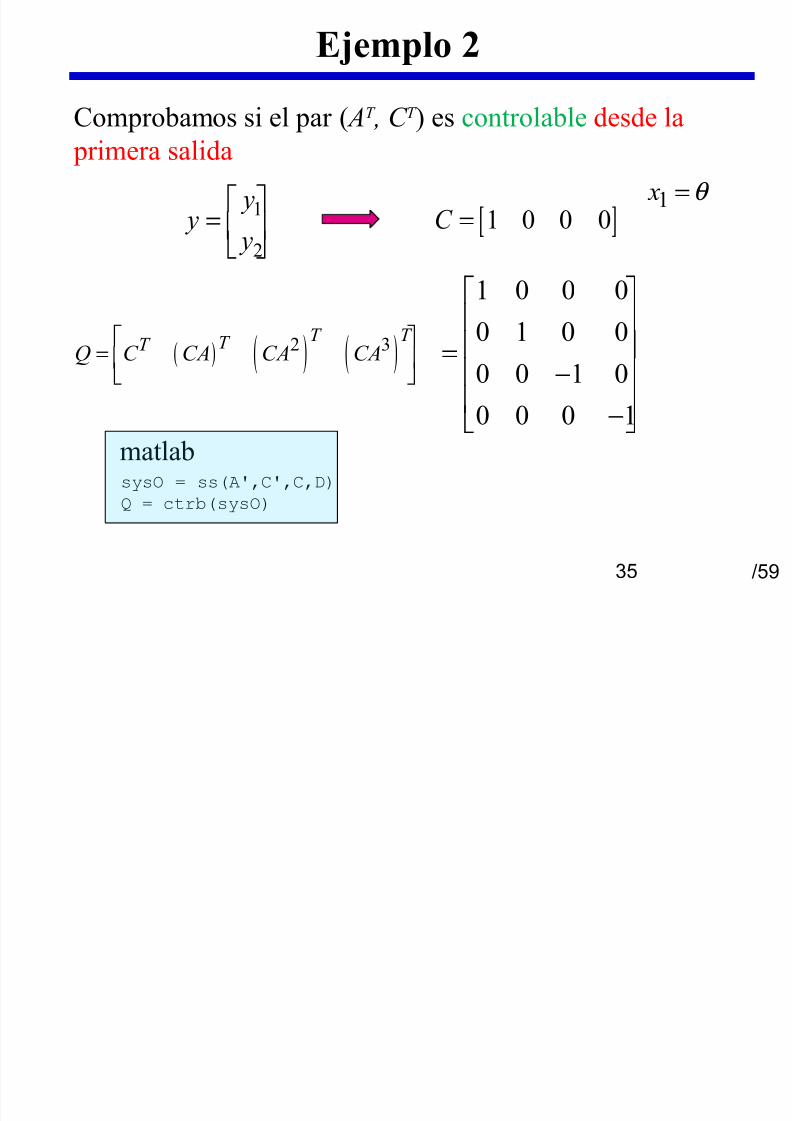
35
-omprobamos si el par ) AT , C T * es controlable desde la
primera salida
sysO = ss(A',C',C,D)
Q = ctrb(sysO)
matlab
[ ]1 ( ( (C =1
2
y y
y
=
( ) ( ) ( )2 3T T T T
C CA CA CA
=
1 ( ( (
( 1 ( (
( ( 1 (
( ( ( 1
=
−
−
1 x θ =
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 36/59
/59
E)em#lo +
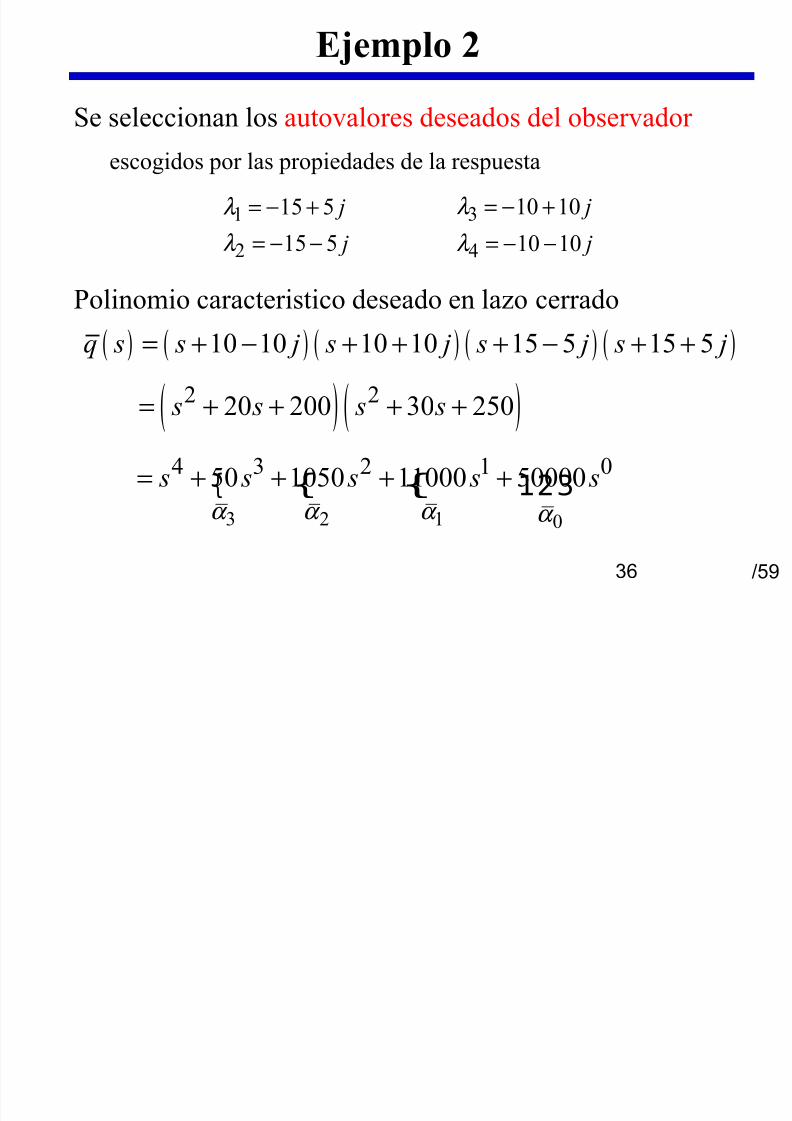
36
&e seleccionan los autovalores deseados del observador
escogidos por las propiedades de la respuesta
olinomio caracteristico deseado en lazo cerrado
1
2
15 5
15 5
!
!
λ
λ
= − +
= − −3
4
1( 1(
1( 1(
!
!
λ
λ
= − +
= − −
( ) ( ) ( ) ( ) ( )1( 1( 1( 1( 15 5 15 5" s s ! s ! s ! s != + − + + + − + +
( ) ( )2 2
2( 2(( 3( 25( s s s s= + + + +
{ { {3 2 1 (
4 3 2 1 (5( 1(5( 11((( 5(((( s s s s s
α α α α
= + + + + 123
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 37/59
/59
E)em#lo +
37
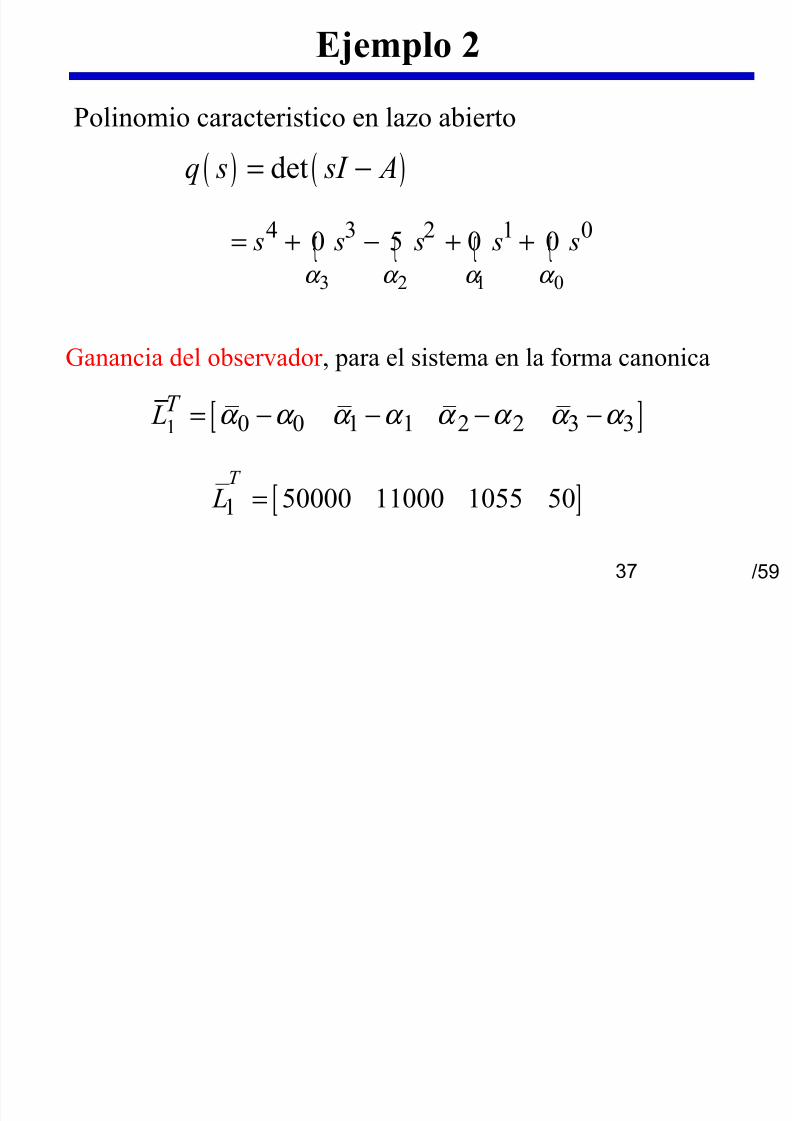
olinomio caracteristico en lazo abierto
anancia del observador , para el sistema en la "orma canonica
( ) ( )det" s sI A= −
{ { { {
3 2 1 (
4 3 2 1 (( 5 ( ( s s s s s
α α α α
= + − + +
[ ]1 ( ( 1 1 2 2 3 3T
L α α α α α α α α = − − − −
[ ]1 5(((( 11((( 1(55 5(T
L =
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 38/59
/59
E)em#lo +
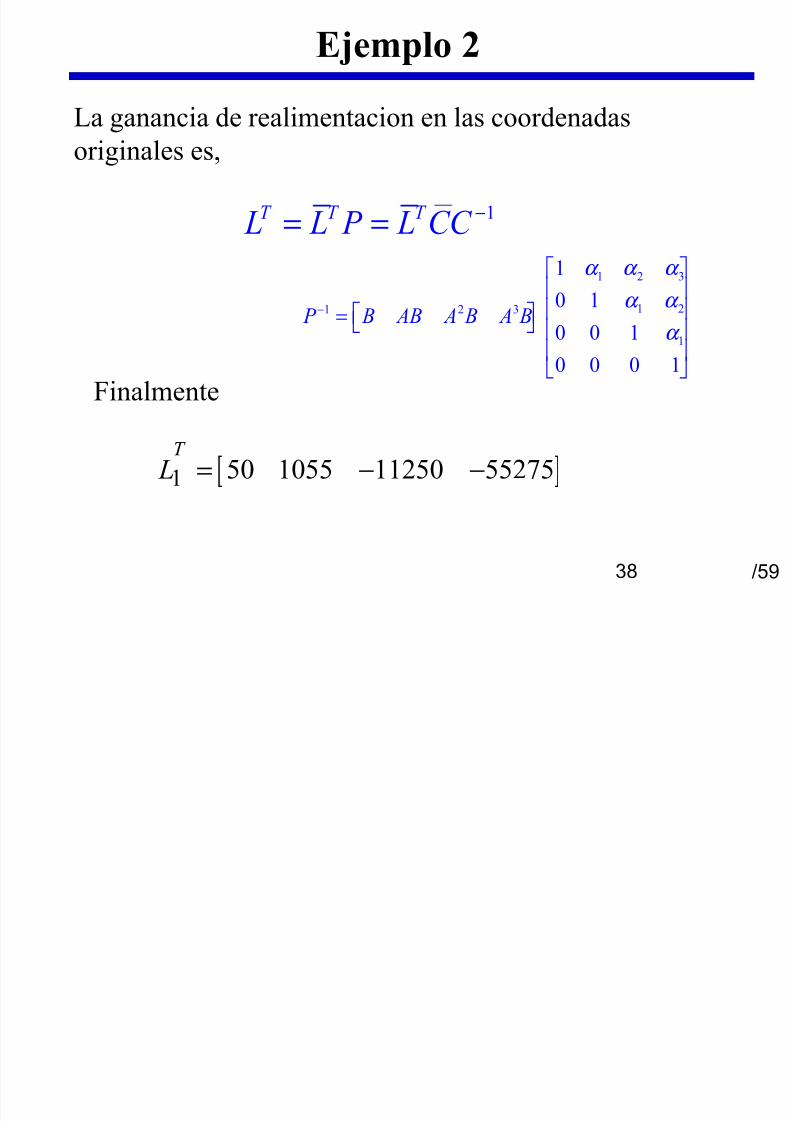
38
6a ganancia de realimentacion en las coordenadas
originales es,
<inalmente
1T T T L L P L CC −= =
1 2 3
1 21 2 3
1
1
( 1
( ( 1
( ( ( 1
P B AB A B A B
α α α
α α
α −
=
[ ]1 5( 1(55 1125( 5525T
L = − −
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 39/59
/59
E)em#lo +
39
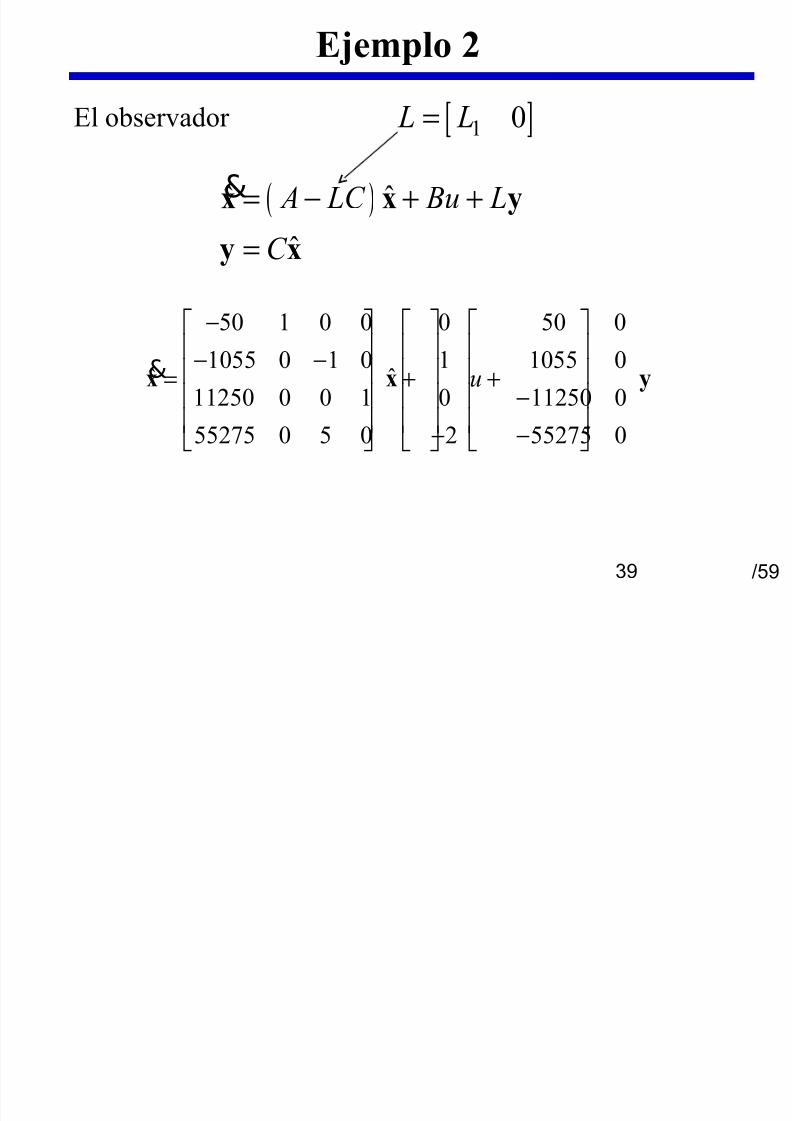
El observador
( )% %
%
A LC Bu L
C
= − + +
=
x x ,
, x
&
5( 1 ( ( ( 5( (
1(55 ( 1 ( 1 1(55 (% %
1125( ( ( 1 ( 1125( (
5525 ( 5 ( 2 5525 (
u
− − − = + +
−
− −
x x ,&
[ ]1 ( L L=
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 40/59
/59
E)em#lo +
40
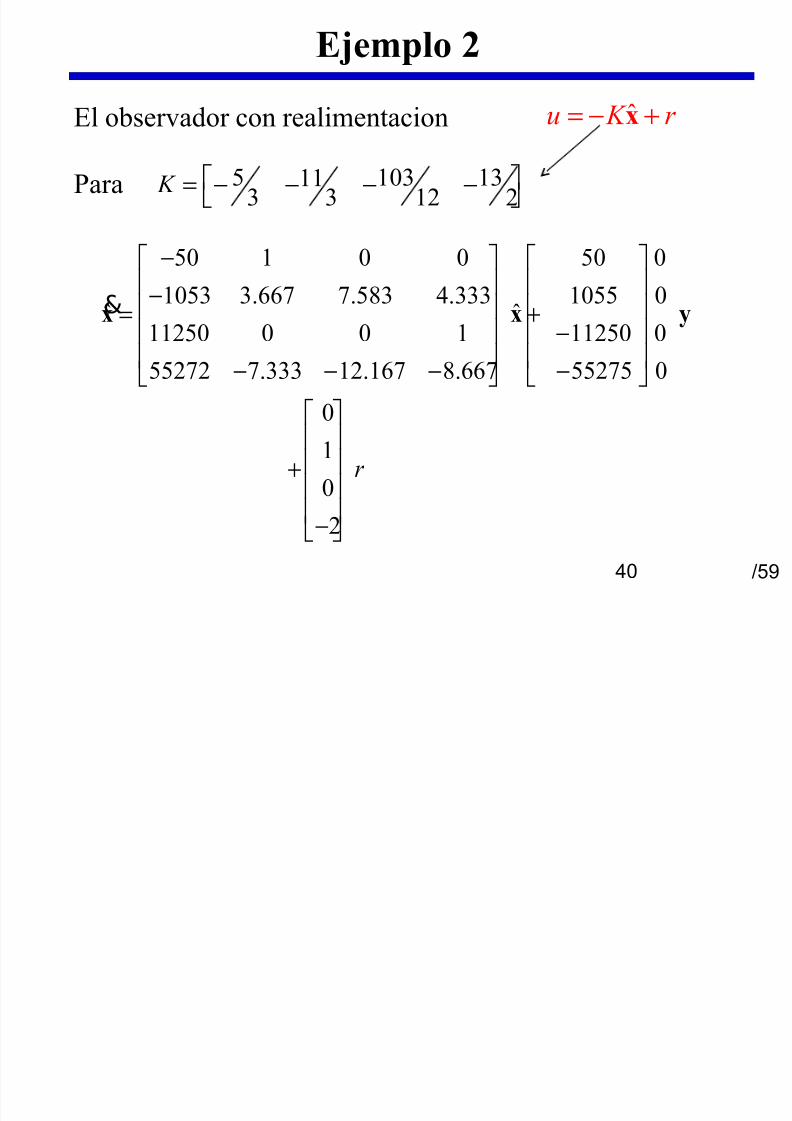
El observador con realimentacion
ara
5( 1 ( ( 5( (
1(53 3.FF .5G3 4.333 1(55 (% %
1125( ( ( 1 1125( (
5522 .333 12.1F G.FF 5525 (
(1
(
2
r
−
− = +−
− − − −
+ −
x x ,&
%u K r = − +x
5 1(3 13113 3 12 2
K = − − − −
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 41/59
/59
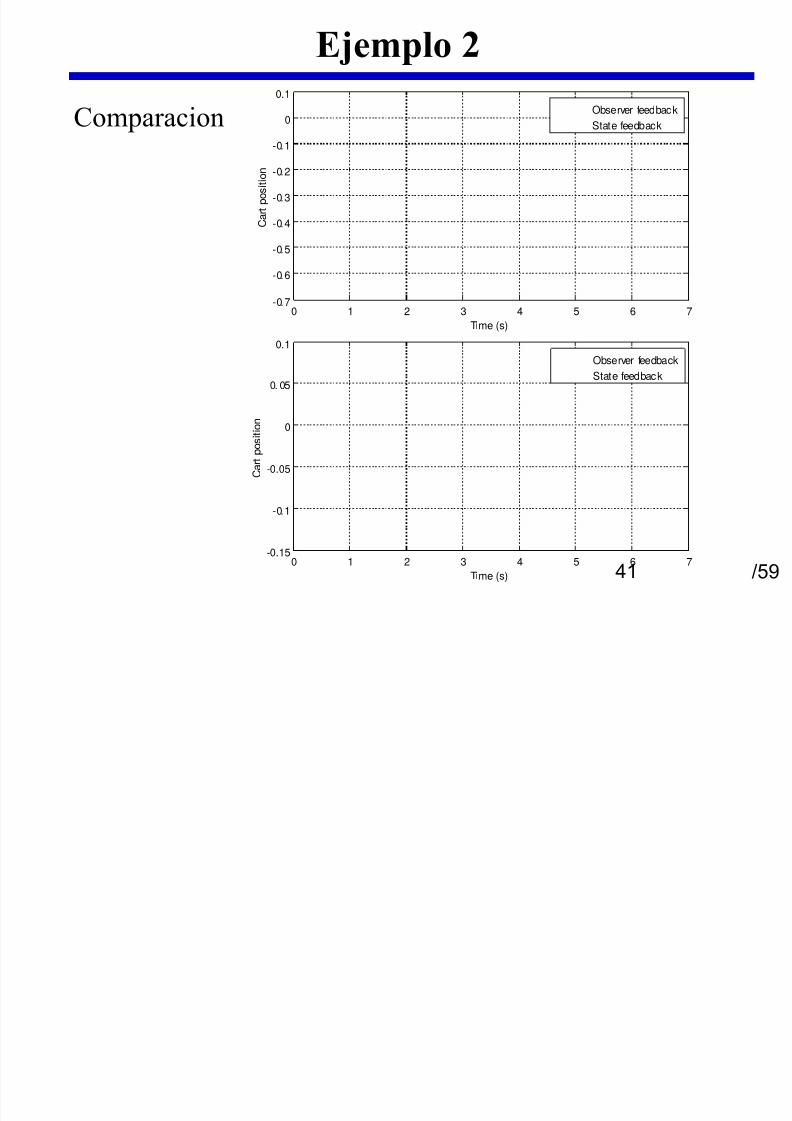
E)em#lo +
41
-omparacion
0 1 2 3 4 5 6 7-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
Time (s)
C a r t p o s i t i o n
Observer feedback
State feedback
0 1 2 3 4 5 6 7-0.15
-0.1
-0.05
0
0.05
0.1
Time (s)
C a r t p o s i t i o n
Observer feedback
State feedback
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 42/59
/59
E)em#lo -
42
-onsidere el pHndulo invertido del e/emplo anterior
&ean los autovalores deseados −1.5±(.5 ! −1± ! .
A#?6# tiene la "uncion K = place) A,B,P * !ue calcula K para ubicar los autovalores en los valores dados en el
vector P .
EIER-J-J;$ Diseñar el controlador con observador
construir observar el comportamiento del
sistema en lazo cerrado en &imulinK
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 43/59
/59
EL OBSERADOR DE ORDE'RED.CIDO
43
i

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 44/59
/59
El observador de orden reducido
&e supondra, aora, !ue " de los # estados del sistema
pueden ser medidos en "orma directa.
» Estos estados se agrupan en el vector
» mientras !ue los restantes # $ " estados se agrupan en
» 6a ecuacion de estado original
44
C tiene rango completo de "ila
1 1 2, , ,T
" x x x x =
2 1 2, , ,T
" " # x x x x+ + =
$ B
C
= +Σ
=
x Ax u
, x
& $ , $ , $# # B # p C " #× × ×A
1 x
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 45/59
/59
El observador de orden reducido
&i C ' 0 I ( , entonces ,)t * son los primeros "
estados
de"iniendo,
45
( ) 1
1T T # "
− ×= ∈C CC R
1 "C I =
El b d d d d id

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 46/59
/59
El observador de orden reducido
de"iniendo
46
+na base para %ull )-*
( ) ( )2 2 2$ # # "
ra#k # "× −
∈ = = −C (R
( )1
2 2 2T T # " &
− ×= ∈R
( ) ( ) ( )1
2 2 2 2 2T T
# " # " & − − × −= = I
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 47/59
/59
El observador de orden reducido
47
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 48/59
/59
El observador de orden reducido
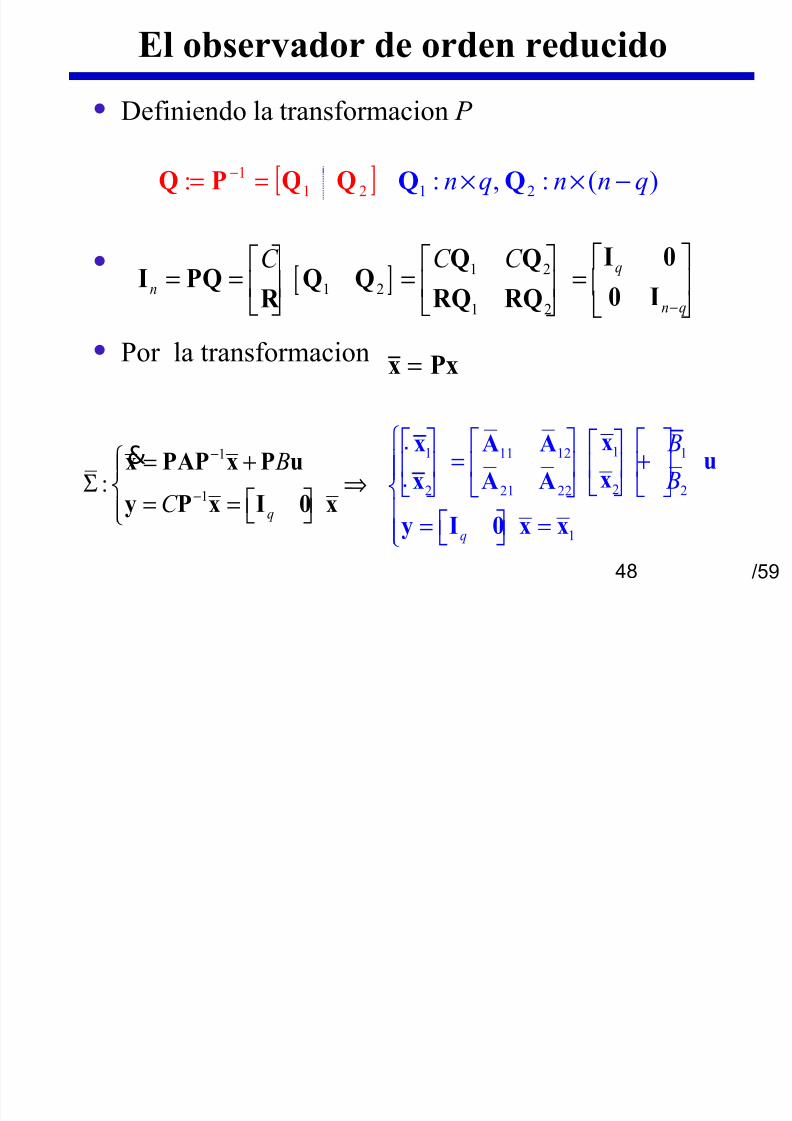
De"iniendo la trans"ormacion P
or la trans"ormacion
48
[ ]21
1$ //$/ == − *)$,$ 21 "##"# −×× //
[ ] 1 2
1 2
1 2
"
## "
C C C
−
= = = =
I (/ /
I $/ / / ( IR/ R/R
$xx =
1
1$
"
B
C
−
−
= +Σ ⇒
= =
x $A$ x $ u
, $ x I ( x
& 11 111 12
22 221 22
1"
B
B
= +
= =
xx A Au
xx A A
, I ( x x
El b d d d d id

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 49/59
/59
El observador de orden reducido
?odos los estados x1 son accesibles. &olo necesitan ser
estimados los ultimos #−" elementos de
+sando , tenemos
De"iniendo,
49
⇒
En la ecuacion de salida se a puestode mani"iesto !ue todos los estados x1
son accesibles seran tomados como
salidas para su realimentacion
x
1x, =
2 21 22 2 2
11 12 2 1
y B
y B
= + +
= + +
x A A x u
, A A x u
&
&
21 2
11 1
B
B
= + = − −
u A , u
0 , A , u&
=
+=
212
2222
xA0uxAx
11 111 12
22 221 22
1"
B
B
= +
= =
xx A Au
xx A A
, I ( x x
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 50/59
/59
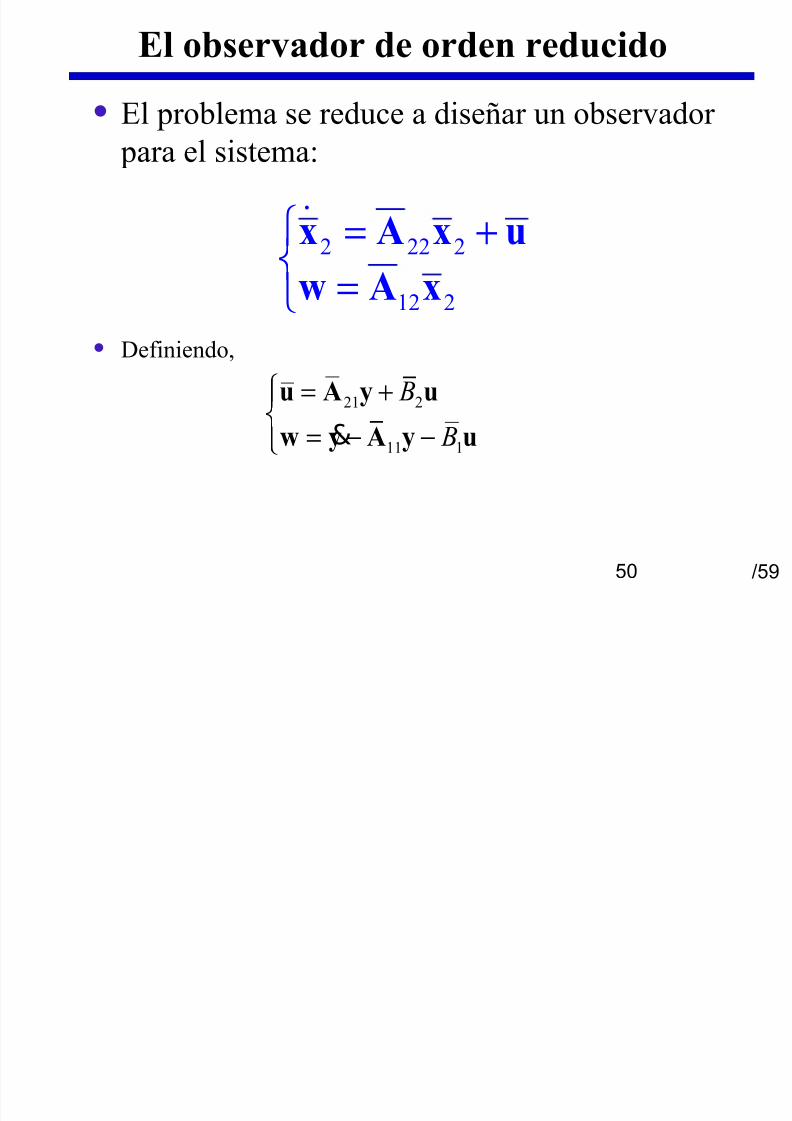
El observador de orden reducido
El problema se reduce a diseñar un observador
para el sistema$
De"iniendo,
50
21 2
11 1
B
B
= +
= − −
u A , u
0 , A , u&
=
+=
212
2222
xA0
uxAx
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 51/59
/59
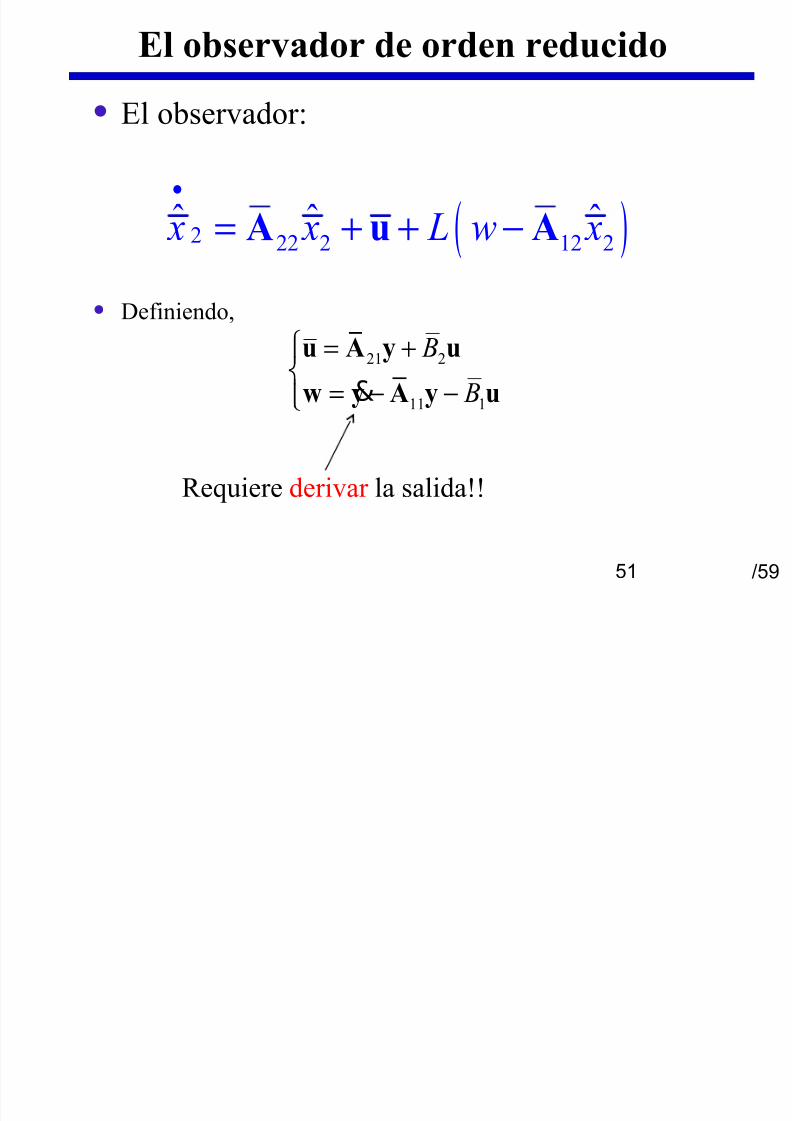
El observador de orden reducido
El observador$
De"iniendo,
51
Re!uiere derivar la salidaLL
21 2
11 1
B
B
= +
= − −
u A , u
0 , A , u&
( )2 22 2 12 2% % % x x L ' x•
= + + −A u A
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 52/59
/59
El observador de orden reducido
ara eliminar la derivada, de"inir
Entonces,
52
( ) ( ) ( )2%t t t ξ = −x L,
( ) ( ) ( )2%
d d d
t t t dt dt dt ξ = −x L ,
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 53/59
/59
El observador de orden reducido
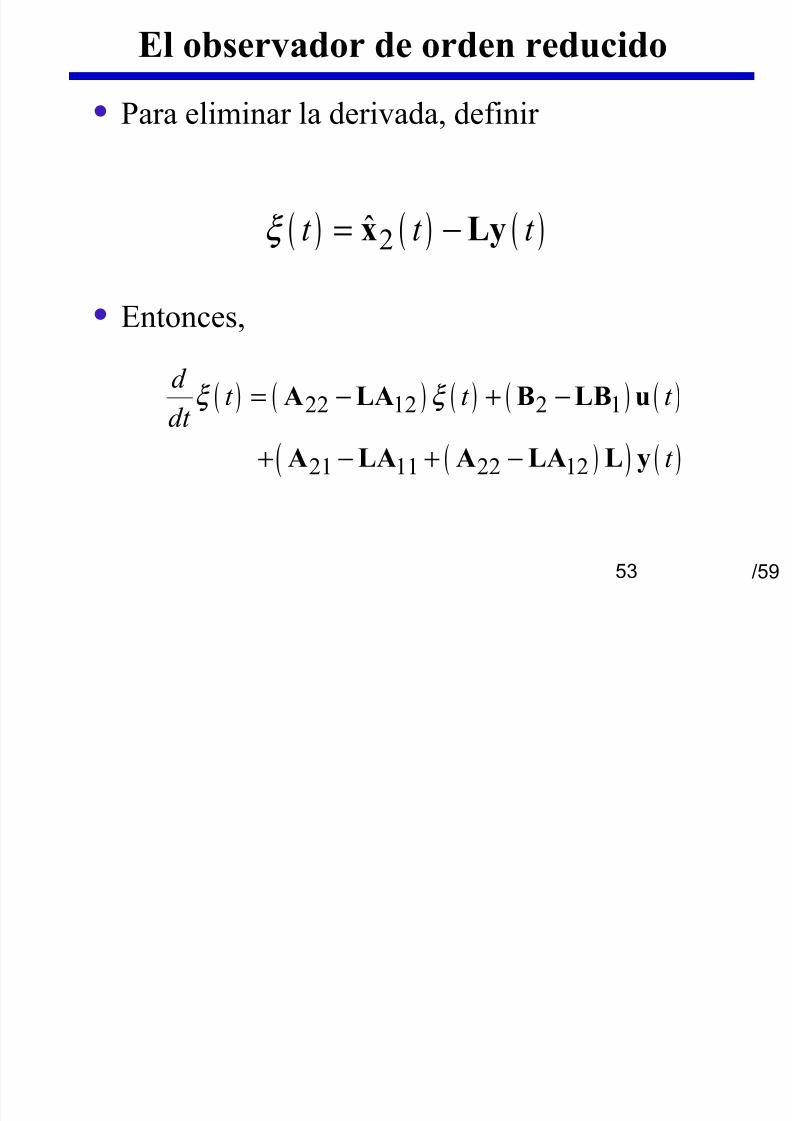
ara eliminar la derivada, de"inir
Entonces,
53
( ) ( ) ( )2%t t t ξ = −x L,
( ) ( ) ( ) ( ) ( )
( )( ) ( )
22 12 2 1
21 11 22 12
d t t t
dt t
ξ ξ = − + −
+ − + −
A LA B LB u
A LA A LA L ,
El b d d d d id
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 54/59
/59
El observador de orden reducido
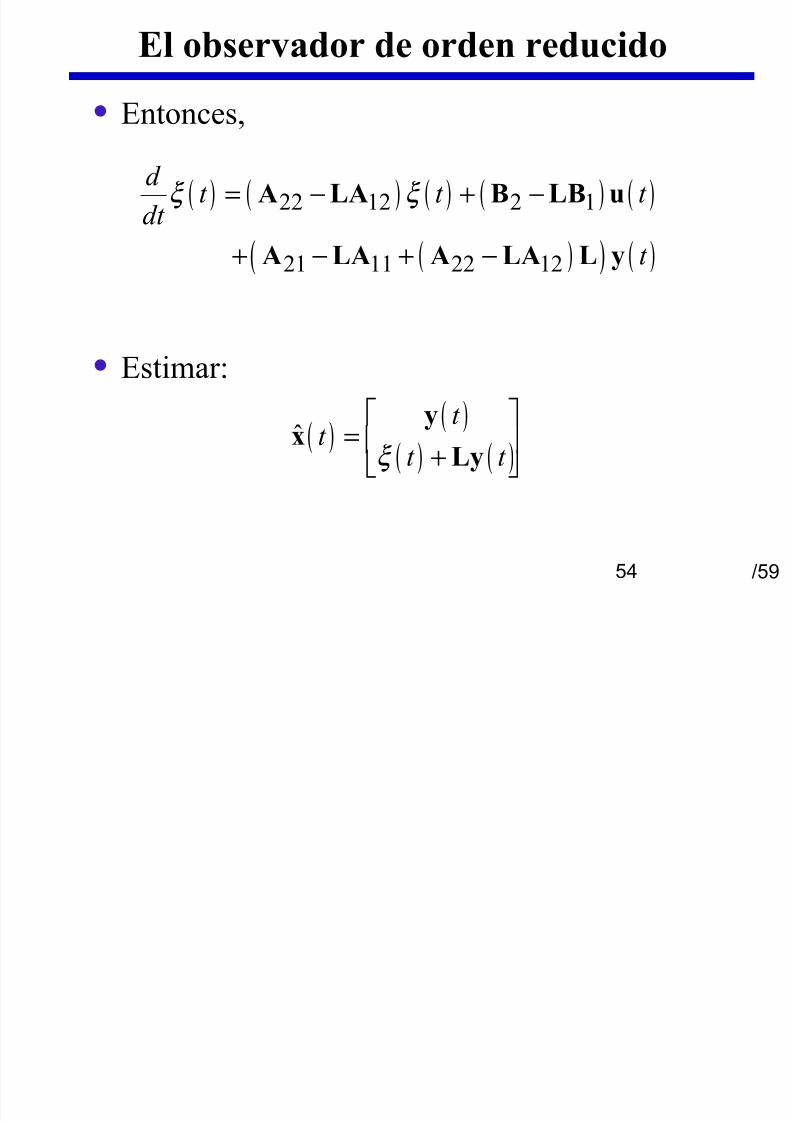
Entonces,
Estimar$
54
( ) ( ) ( ) ( ) ( )
( )( ) ( )
22 12 2 1
21 11 22 12
d t t t
dt
t
ξ ξ = − + −
+ − + −
A LA B LB u
A LA A LA L ,
( ) ( )( ) ( )
% t t t t ξ
= + ,x
L,
Realimentacion de los estados estimados

7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 55/59
/59
Realimentacion de los estados estimados
El control se genera por la realimentacion de los
estados estimados
55
( ) ( ) [ ] ( )
( ) ( )
[ ] ( )
( )
1 2
1 2 2
% P
t t t
t t
t
t
ξ
ξ
= − = −
+
= − +
,u 1 x 1 1
L,
,1 1 L 1
( ) ( ) [ ] ( )
( ) ( )
[ ] ( )
( )
1 2
1 2 2
%t
t t
t t
t
t
ξ
ξ
= − = − +
= − +
,u 1x 1 1
L,
,1 1 L 1
Realimentacion de los estados estimados
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 56/59
/59
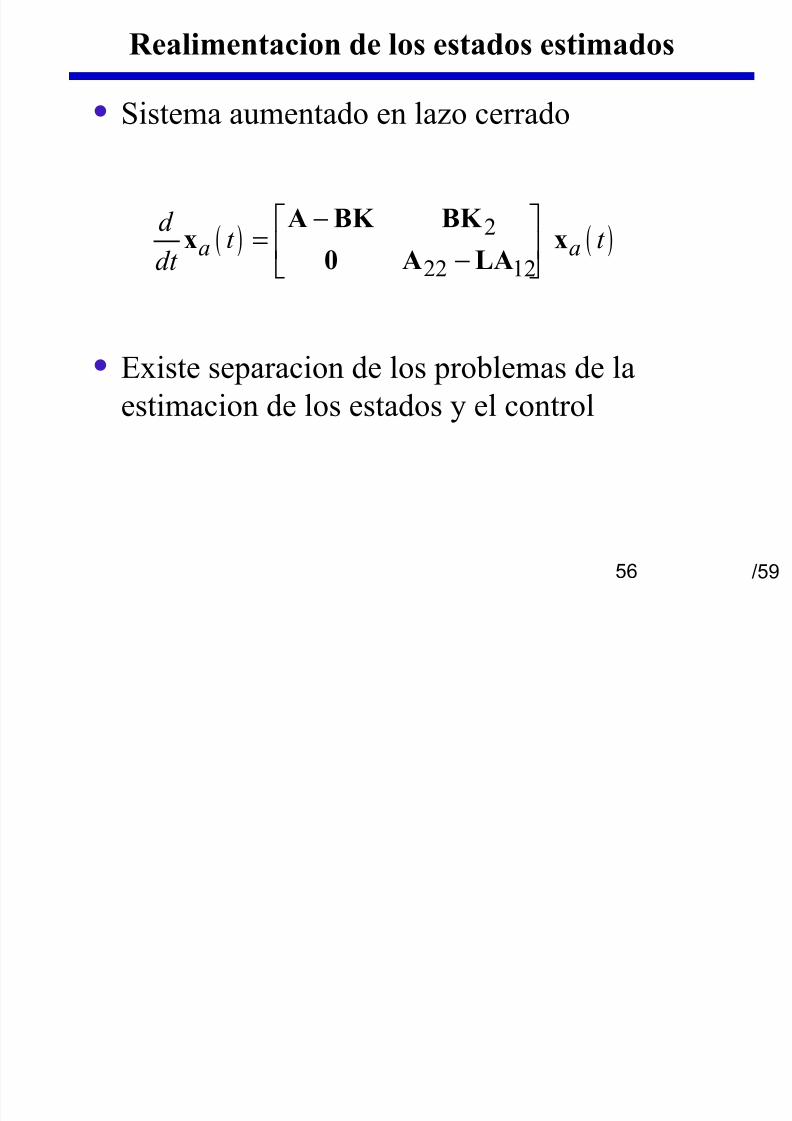
Realimentacion de los estados estimados
&istema aumentado en lazo cerrado
Eiste separacion de los problemas de la
estimacion de los estados el control
56
( ) ( )2
22 12a a
d t t
dt
− = −
A B1 B1 x x
( A LA
Realimentacion de los estados estimados
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 57/59
/59
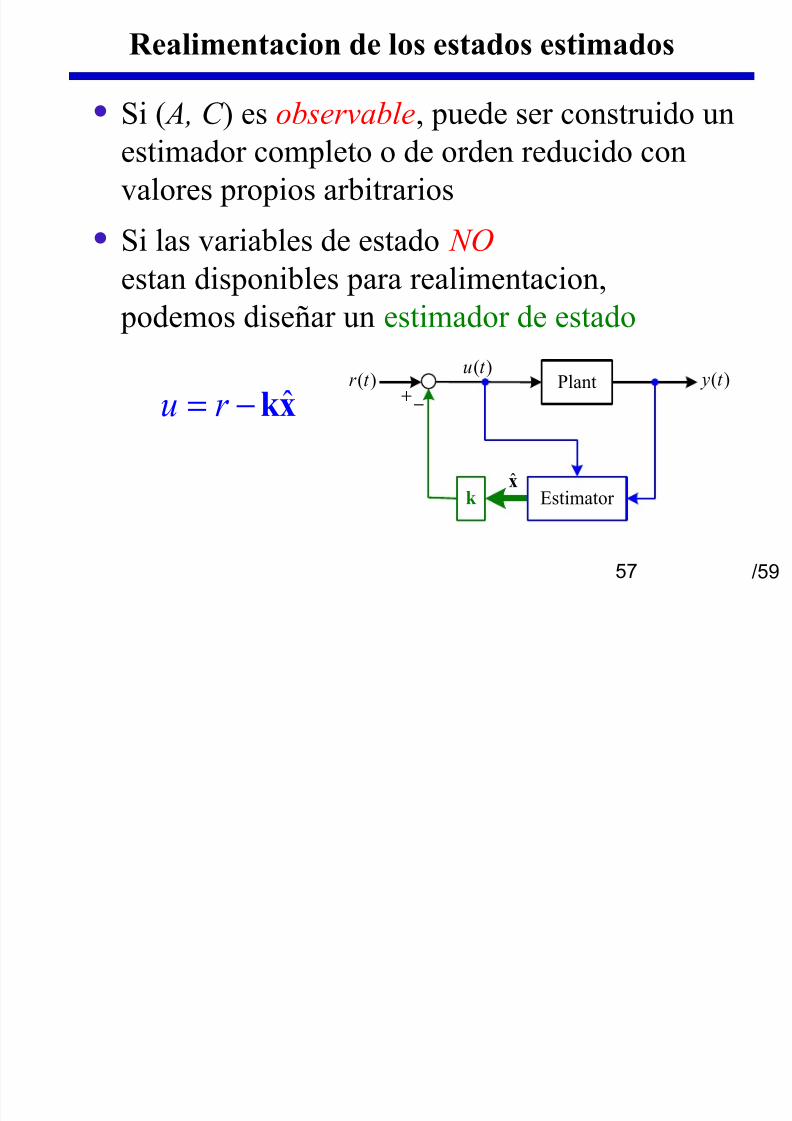
Realimentacion de los estados estimados
&i ) A, C * es o(ser)a(le, puede ser construido un
estimador completo o de orden reducido convalores propios arbitrarios
&i las variables de estado %*
estan disponibles para realimentacion, podemos diseñar un estimador de estado
57
*)t r *)t u
*)t y+
lant
2
−
Estimator x%
x2 %−=
r u
Biblio3ra4ia
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 58/59
/59
Biblio3ra4ia
#. D. 6e8is, A +atematical Approac to
Classical Co#trol , 2((3, on line accesttp$@@888.mast.!ueensu.ca@Mandre8@teacing@m
Robert 6., Nilliams, Douglas #. 6a8renceO Li#ear -tate.-pace Co#trol -ystemsP, Nile,
2((
58
7/23/2019 observadores.pptx
http://slidepdf.com/reader/full/observadorespptx 59/59
5I'


















