oa.upm.esoa.upm.es/35071/1/DAVID_PORTILLO_GARCIA.pdf · AGRADECIMIENTOS Ya parece acabarse lo que...
120
!"#$%&'#()( +,-#./0"#0) (% 1)(&#( !"#$!%& ()#*+#& "$,!-+.- /! +*0!*+!-." +*/$"(-+&%!" /12345361758 91 +7:17;14<3 *=>?134 /1@3448??8 91 =7 6A5898 7=6A4;>8 SDUD ÁXMRV PXOWLPDWHULDO HQ ' 17 &-B!* (!"+" /.#(.-&% (2345 +6784996 :27;<2 +7:17;148 +79=@54;3? 284 ?3 $7;C14@;939 ,8?;5A>7;>3 91 D394;9 /;41>584 91 51@;@E (= +>576 $>9275> 12?69 ,48F1@84 (;5=?34 91 $7;C14@;939 $7;C14@;939 ,8?;5A>7;>3 91 D394;9
Transcript of oa.upm.esoa.upm.es/35071/1/DAVID_PORTILLO_GARCIA.pdf · AGRADECIMIENTOS Ya parece acabarse lo que...
!"#$%&'#()(*+,-#./0"#0)*(%*1)(&#(
!"#$!%&'()#*+#&'"$,!-+.-'/!'+*0!*+!-."+*/$"(-+&%!"
/12345361758'91'+7:17;14<3'*=>?134
/1@3448??8'91'=7'6A5898'7=6A4;>8'SDUD�ÁXMRV�PXOWLPDWHULDO�HQ��''
17'&-B!*
(!"+"'/.#(.-&%
(2345*+6784996*:27;<2
+7:17;148'+79=@54;3?284'?3'$7;C14@;939',8?;5A>7;>3'91'D394;9
/;41>584'91'51@;@E
(=*+>576*$>9275>*12?69,48F1@84'(;5=?34'91'$7;C14@;939
$7;C14@;939',8?;5A>7;>3'91'D394;9
����

AGRADECIMIENTOS
Ya parece acabarse lo que en algún momento pareció no tener fin y toca agradecera muchos.
En primer lugar a Pedro, director de esta tesis, por tus enseñanzas científicas tantoen la carrera como en estos años y por hacerme ver lo complicada que se puede haceruna parábola.
No me puedo olvidar de todo el Instituto de Fusión, que me abrió sus puertaspara comenzar mi carrera científica. Y en particular, a Manolo Perlado, directordel Instituto, cuyo trabajo y sobre todo su carácter hacen que el Instituto tengala reputación que se merece. Y a todos mis compañeros en el grupo de física deplasmas, con los que he pasado grandes momentos. En especial a Manuel, Eduardoy Alberto.
Y como no, a toda mi familia. En primer lugar, porque se lo prometí y porquesi hay alguien a quien le hace ilusión esta tesis es a ella, a mi madre. Ya la tienes.También a mi padre, porque si no me hubieras hecho rabiar tanto, no sería quiensoy. A Adri y a Pret, porque no creo que sepáis lo mucho que aportáis a todo lo quehago. A Julia, a Faini y a Manuela, por verme, pero no tratarme, como un loco. Amis abuelos, a todos ellos. A mis primos Miguel y Queches. A mi tía y a Juan. Y ami tío, por todo y porque me enseñaste que las matemáticas son mucho más. Y porúltimo, a María, porque has aguantado mucho y esta tesis ha sido nuestra.

RESUMEN
En esta tesis se presenta un método numérico para resolver las ecuaciones de Eulerpara flujos multimaterial en malla euleriana. Este solver se ha acoplado en el códigohidrodinámico en dos dimensiones con transporte de radiación desarrollado en elInstituto de Fusión Nuclear de la UPM bajo la dirección del profesor Pedro Velarde,ARWEN. Los objetivos de este trabajo son:
Desarrollo e implementación de un método de Godunov unsplit de alto ordenmultimaterial en 2D para malla euleriana en geometría cartesiana y geometríacilíndrica. Se presenta una extensión del trabajo realizado por Miller y Puc-kett (36) a una formulación unsplit. Además, se ha prestado especial atenciónal acoplamiento con el transporte de radiación y la conducción de calor. Elmétodo presentado se ha probado en una gran cantidad de problemas.
Aplicación del código multimaterial al estudio de experimentos reales:
• Simulación de una propuesta de experimento de laboratorio para repro-ducir la etapa de arrancamiento de material de la interacción entre el gasproveniente de la explosión de una supernova y la estrella secundaria enun escenario degenarado (SD).
• Formación de jets en el laboratorio producidos por la colisión de dosplasmas.

ABSTRACT
We present a solver for the Euler equations for multimaterial flows in eulerianmesh. This solver has been coupled in the 2D AMR radiation transport code deve-loped at Instituto de Fusión Nuclear (UPM) under the direction of professor PedroVelarde, ARWEN. The main goals of this thesis are:
Development and implementation of an 2D unsplit high-order Godunov met-hod for multimaterial flows in eulerian mesh for cartesian and axialsimetrygeometry. We present an extension of the work of Miller and Puckett (36) toan unsplit formulation. Also, we have paid special attention to the couplingwith radiation transport and heat conduction. The method has been tested ina wide variety of problems.
Application of the multimaterial solver to the study of real experiments:
• Simulation of a proposal of a laboratory experiment aimed to reprodu-cing the stripping stage of the interaction between the gas ejected duringa supernova explosion and the secondary star in the Single Degeneratescenario.
• Experiments of plasma jets in the laboratory obtained by the collissionof two hot plasmas.

Índice general
1. INTRODUCCIÓN 51.1. ARWEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1. AMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4. Estructura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2. TEORÍA MATEMÁTICA 112.1. Ecuaciones hiperbólicas . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1. Leyes de conservación y la ecuación escalar de advección . . . 112.1.2. Sistemas lineales hiperbólicos . . . . . . . . . . . . . . . . . . 132.1.3. El problema de Riemann . . . . . . . . . . . . . . . . . . . . . 15
2.2. Métodos de volumen finito para leyes de conservación . . . . . . . . . 162.2.1. Convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.2. Método de Godunov . . . . . . . . . . . . . . . . . . . . . . . 19
2.3. Importancia de la forma conservativa . . . . . . . . . . . . . . . . . . 202.3.1. Ley de conservación escalar no lineal. Solución débil . . . . . . 212.3.2. Un método no conservativo erróneo . . . . . . . . . . . . . . . 222.3.3. Teorema de Lax-Wendroff . . . . . . . . . . . . . . . . . . . . 232.3.4. Consistencia entrópica del método de Godunov . . . . . . . . 27
3. PPM 293.1. PPM para la ecuación de advección . . . . . . . . . . . . . . . . . . . 293.2. PPM para Fluidodinámica en 1D . . . . . . . . . . . . . . . . . . . . 34
3.2.1. Mecanismos Disipativos . . . . . . . . . . . . . . . . . . . . . 373.3. Solver Unsplit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
1
Índice general
4. ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA 43
4.1. Algoritmos Volume Of Fluid (VOF) . . . . . . . . . . . . . . . . . . . 434.2. ALGORITMO ELVIRA . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2.1. Cálculo de las pendientes . . . . . . . . . . . . . . . . . . . . . 454.2.2. Cálculo de las constantes de las rectas . . . . . . . . . . . . . 474.2.3. Elección de la recta . . . . . . . . . . . . . . . . . . . . . . . . 494.2.4. Interfase lineal . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3. Algoritmo Unsplit de evolución temporal . . . . . . . . . . . . . . . . 514.4. Ejemplo de advección con ELVIRA . . . . . . . . . . . . . . . . . . . 53
5. MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MUL-TIMATERIAL 55
5.1. Ecuaciones de Euler para multimaterial . . . . . . . . . . . . . . . . . 555.2. Método de Godunov para multimaterial . . . . . . . . . . . . . . . . 58
5.2.1. Material único . . . . . . . . . . . . . . . . . . . . . . . . . . . 585.2.2. Avance en el tiempo . . . . . . . . . . . . . . . . . . . . . . . 60
5.3. Validación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.3.1. Test Two Shock problem (1D) . . . . . . . . . . . . . . . . . . 675.3.2. Test cuadrantes Leveque . . . . . . . . . . . . . . . . . . . . . 705.3.3. Inestabilidad de Kelvin Helmholtz . . . . . . . . . . . . . . . . 725.3.4. Inestabilidad de Rayleigh Taylor . . . . . . . . . . . . . . . . . 725.3.5. Inestabilidad de Rytchmyer Meshkov . . . . . . . . . . . . . . 765.3.6. Burbuja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6. SIMULACIÓN SUPERNOVA Ia 83
6.1. Experimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 836.2. Resultados de la simulación . . . . . . . . . . . . . . . . . . . . . . . 84
7. SIMULACIÓN DE JETS 89
7.1. Teoría . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897.1.1. Relaciones de salto . . . . . . . . . . . . . . . . . . . . . . . . 917.1.2. Gas ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 917.1.3. Gas real . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.2. Experimentos de formación de jets . . . . . . . . . . . . . . . . . . . 94
2
Índice general
8. CONCLUSIONES 1038.1. Trabajo futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3

1 INTRODUCCIÓN
El tema central de esta tesis es el desarrolo e implementación de un código flui-dodinámico multimaterial conservativo en malla euleriana. Este trabajo se enmarcadentro del código de simulación ARWEN, un código hidrodinámico con transpor-te de radiación desarrollado en el Instituto de Fusión Nuclear de la UPM bajo ladirección del profesor Pedro Velarde, director de esta tesis.
1.1. ARWEN
El objetivo del código ARWEN es realizar simulaciones de experimentos de físicade plasmas. El modelo físico que rige el movimiento del plasma se basa en la con-servación de la masa, cantidad de movimiento y energía dentro del volumen fluidoconsiderado. Estas leyes de conservación son un sistema de ecuaciones diferencialeshiperbólicas, que se estudian en el siguiente capítulo y cuya forma general es
@U
@t+
kX
i=1
@F · ei@xi
= b (1.1)
donde en el caso de un plasma se tiene
U =
2
64⇢
⇢~v
⇢E
3
75 , F =
2
64⇢~vt
~v⇢~vt + Ip
(⇢E + p)~vt
3
75 , b =
2
640
⇢~g
⇢~v · ~g
3
75 (1.2)
donde⇢ es la densidad del fluido, ~v la velocidad, p la presión, E es la suma de laenergía interna y la cinética y ~g representa una aceleración, como puede ser la gra-vedad, aunque este término se suele despreciar en las simulaciones de experimentoscon plasmas. En esta tesis se implementa un nuevo paquete de fluidodinámica paraARWEN.
5

1 INTRODUCCIÓN
Además, hay que incluir las fuentes de energía como consecuencia de la conduc-ción y de la propagación de radiación electromagnética. Para ello, se consideran lossiguientes modelos:
Radiación electromagnética. A partir del balance entre tasa de cambio de inten-sidad, tasa de pérdidas y tasa de ganancias, se obtiene la ecuación de transportede partículas no cargadas en un medio, conocida como ecuación de Boltzmanny cuya forma lineal dependiente del tiempo es
1v(E)
@@t( (x,⌦, E, t)) +⌦ ·r (x,⌦, E, t)
+⌃t (x,E, t) (x,⌦, E, t) = S (x,⌦, E, t)(1.3)
donde (x,⌦, E, t) es el flujo angular de fotones dependiente de la posición,la dirección, la energía y el tiempo; v (E) es la velocidad a la que se mueveun fotón de energía E en el medio considerado; ⌃t es la sección eficaz totalde colisión con las partículas del medio y S es la fuente de radiación, dondese incluyen las fuentes por dispersión, fuentes externas fijas o fuentes externasnuevas.
El paquete de radiación de ARWEN ha sido objeto de varios trabajos y sepuede encontrar más información sobre los métodos utilizados para resolver laecuación de transporte en (39) y (17).
Conducción. El transporte de electrones en un plasma se rige por la ecuaciónde Fokker-Planck. Sin embargo, debido a la complejidad de resolver este mo-delo, en ARWEN se resuelve un modelo simplificado de difusión de electrones.Teniendo en cuenta que las especies existentes en el plasma son los iones y loselectrones, el balance de energía por conducción queda como
⇢cve@T
e
@t= r (kerTe) + Se
⇢cvi@T
i
@t= r (kirTi) + Si
(1.4)
donde los subíndies i y e hacen referencia a los iones y electrones respectiva-mente, cv es el calor específico a volumen constante y k es el coeficiente deconducción térmico.
Además, es en conducción donde se introduce el aporte de energía por fuentesexternas, como puede ser un láser.
6

1.1 ARWEN
Con respecto al paquete de conducción se puede encontrar más informaciónen (38) y (17).
Una vez vistas las principales aportaciones al modelo, se pueden establecer las ecua-ciones que ARWEN resuelve, que son
@⇢@t
+r (⇢~v) = 0
@⇢~v@t
+r (~v⇢~v) = �r (pm + pr)@⇢E@t
+r (⇢E~v) = �r (pm + pr) + S +rqc +rqr1c@I@t
+⌦rI + I = ✏
(1.5)
donderqc = �r (kerT )rqr =
´(I � ✏) d⌫
Er =
1c
´Id⌦d⌫
pr =
13Er
(1.6)
Para cerrar este conjunto de ecuaciones hay que completar el modelo con laspropiedades de la materia, en particular con las ecuaciones de estado y opacidadespara cada material. Estas propiedades se obtienen fuera de ARWEN y se introducencomo input mediante tablas. La forma de obtenerlas ha sido motivo de otros trabajosde investigación (17) , (21).
El conjunto de ecuaciones (1.5) junto a las propiedades del plasma conformanun conjunto de ecuaciones de gran complejidad, cuya solución se obtiene a partirde la división del problema en tres partes: fluidodinámica, conducción electrónica ytransporte de radiación.
El esquema de funcionamiento de ARWEN se puede resumir de la siguiente ma-nera. En primer lugar, se avanzan en el tiempo las variables de masa, cantidad demovimiento y energía siguiendo las ecuaciones de Euler; con la información propor-cionada por el avance de la fluidodinámica, se obtienen las fuentes de energía comoconsecuencia de la conducción electrónica, el transporte de radiación y fuentes ex-ternas (láser). Por último, con estos términos fuentes se actualiza la ecuación de laenergía.
7
1 INTRODUCCIÓN
1.1.1. AMR
ARWEN incluye un esquema de resolución con malla adaptativa (AMR), queconsiste en la división del dominio en varios subdominios con diferentes resoluciones.Eligiendo de forma apropiada las partes del sistema que requieren más resolución,este esquema permite ahorrar tanto tiempo como memoria en ejecuciones con muchasceldas. Como contrapartida, su uso implica mayor complicación en las operacionesy el paso de información adicional desde los diferentes solvers del código.
Dado que en general el plasma que se simula se mueve en el dominio, las partesque requieren mayor resolución o menor cambian con el tiempo, por lo que es nece-sario definir cuándo una zona debe tener más o menos resolución. Esta función deremallado se lleva a cabo cada cierto número de pasos de tiempo y conforme a unoscriterios que pueden ser definidos por el usuario y que en principio son:
Aquellas zonas en las que el gradiente de densidad o de energía interna essuperior a cierto límite.
Como consecuencia de este trabajo, las celdas que tienen más de un materialse refinan siempre al máximo.
La implementación de AMR se lleva a cabo en ARWEN mediante el uso de la libreríaBoxLib desarrollada por la Universidad de Berkeley.
1.2. Motivación
El trabajo aquí expuesto ha sido motivado por la necesidad de incorporar un solver
multimaterial para la parte fluidodinámica de ARWEN con el fin de poder realizarsimulaciones de experimentos en los que intervienen más de un material. Ejemplosde este tipo de problemas son:
Formación de jets en experimentos de laboratorio a partir de la colisión de dosplasmas. Este tipo de jets pueden jugar un importante papel en la fusión porconfinamiento inercial y su estudio ha sido parte de esta tesis
La interacción entre las paredes del cono de oro y el material de la cáscara enlos blancos de ignición rápida.
8
1.2 Motivación
La resolución numérica de las ecuaciones de fluidodinámica se puede tratar desdedos puntos de vista diferentes: la formulación Euleriana, si las celdas están fijasen el espacio y las partículas fluidas se mueven a través de ellas, y la formulaciónLagrangiana, si las celdas se corresponden con partículas fluidas .
Desde el punto de vista del tratamiento de varios materiales, la formulación La-grangiana presenta la ventaja de que la implementación es muy sencilla, al tratarsela malla de partículas fluidas y estar claramente definido el material en cada celda.Sin embargo, los códigos lagrangianos presentan grandes problemas a la hora detratar grandes deformaciones por culpa de la distorsión producida en la malla. Encambio, la formulación Euleriana es muy precisa a la hora de resolver las grandesdeformaciones típicas de gases, pero el tratamiento multimaterial se vuelve muycomplicado, al tener que tratar diferentes materiales en una misma celda.
Con el propósito de solventar el problema de la dificultad de tratar varios mate-riales en una misma celda, surgió el Ghost Fluid Method (GFM) (19), que pretendecombinar la robustez del esquema Euleriano con el sencillo método lagrangiano paratratar la interfase entre materiales. De esta forma, en una dimensión el GFM siguela interfase mediante una función level set con la que se marca la celda en la quese encuentra la interfase y define ghost cells para cada material con las que obtieneflujos diferentes para cada material. En caso de problemas en varias dimensiones, seusa un operador spliting.
El GFM da buenos resultados, pero tiene el problema de que no es conservati-vo. Éste no es un problema meramente físico, pues no tiene sentido que se pierdamaterial en un dominio en el que no sale material, sino también matemático. Comose verá más adelante, el hecho de usar un método conservativo da mucha seguridadmatemática de estar obteniendo la solución correcta. En concreto se verá el teoremade Lax-Wendroff que asegura que si se está usando un método conservativo y con-sistente, si la solución converge, ésta es una solución débil de la ley de conservación.
Entre los diferentes métodos conservativos que se pueden utilizar para resolver lasecuaciones de Euler, probablemente el más importante es el método de Godunov ysus variantes de alto orden, debido a los buenos resultados que da. El trabajo llevadoa cabo en esta tesis consiste en el desarrollo de un método de Godunov unsplit dealto orden multimaterial para malla euleriana basado en los trabajos de Colella yGlaz (12) y de Miller y Puckett (36).
9
1 INTRODUCCIÓN
1.3. Objetivos
Los objetivos de este trabajo son:
Desarrollo e implementación de un método de Godunov unsplit de alto ordenmultimaterial en 2D para malla euleriana en geometría cartesiana y geometríacilíndrica. Validación de los resultados obtenidos.
Acoplamiento del nuevo paquete de fluidodinámica multimaterial al códigoARWEN y al esquema AMR.
Aplicación del código de simulación al estudio de experimentos de astrofísica delaboratorio y al estudio de creación de jets mediante el choque de dos plasmas.
1.4. Estructura
El desarrollo de esta tesis comienza con una introducción a la teoría matemáticaen la que se basa el método utilizado para resolver las ecuaciones de Euler paramultimaterial, definiendo el método de Godunov y llegando a los resultados másimportantes de este método en cuanto a convergencia (teorema de Lax-Wendroff) yconsistencia entrópica.
A continuación, en el capítulo (3) se hace un estudio especial del método PPM,que es el método de Godunov de alto orden usado para las celdas no definidas comomultimaterial, como se verá posteriormente. Tras ello, en el capítulo (4) se hace unadescripción de los algoritmos de tipo VOF y en particular del algoritmo ELVIRApara reconstrucción local de interfases.
En el capítulo (5) se expone el método utilizado para resolver las ecuaciones paravarios materiales, basado en los trabajos (12) y (36) y que utiliza los métodos PPMy ELVIRA presentados en los capítulos anteriores.
Por último, se presentan dos estudios de experimentos hechos con el código AR-WEN y el nuevo código multimaterial: en primer lugar, una propuesta de experi-mento de astrofísica de laboratorio, en el que se simula la etapa de arrancamiento dematerial de la estrella compañera en una supernova de tipo Ia; y en segundo lugar,un estudio de experimentos llevados a cabo en PALS de formación de jets medianteel choque de dos plasmas.
10
2 TEORÍA MATEMÁTICA
En este capítulo se introducen algunos de los conceptos matemáticos que se hanutilizado en el desarrollo de esta tesis. El objetivo de este capítulo es mostrar laimportancia de los métodos conservativos en la resolución de las leyes de conservacióndesde un punto de vista matemático. De hecho, se verá que el uso de métodosno conservativos es esenciamelnte erróneo para obtener soluciones de las leyes deconservación. Este capítulo es una recopilación y resumen de (26), (62) y (61).
2.1. Ecuaciones hiperbólicas
Las ecuaciones hiperbólicas se utilizan en una gran variedad de problemas físicosen los que hay que modelar ondas. En particular, las ecuaciones de Euler de fluido-dinámica son un sistema de ecuaciones hiperbólicas. El objetivo de esta sección esintroducir los conceptos más importantes de estas ecuaciones y sobre todo introdu-cir el problema de Riemann, que resulta básico para la comprensión de los métodosnuméricos desarrollados en este trabajo.
2.1.1. Leyes de conservación y la ecuación escalar de
advección
El ejemplo más sencillo de ley de conservación en una dimensión es la ecuacióndiferencial
at + f (a (x, t))x = 0 (2.1)
donde a es la densidad de la variable que se conserva y f es el flujo en la direcciónespacial. Por ejemplo, físicamente a (x, t) puede representar la densidad de un fluido,cuya integral en un dominio es la masa del fluido; y f (a (x, t)) es el flujo de masa.Físicamente resulta más natural deducir esta ecuación a partir de la conservación
11

2 TEORÍA MATEMÁTICA
de la masa, es decir
d
dt
ˆ x2
x1
a (x, t) dx = f (a (x1, t))� f (a (x2, t)) (2.2)
Esta ecuación se conoce como forma integral de la ley de conservación. Y de hecho esmucho más interesante desde el punto de vista práctico que (2.1), pues esta ecuaciónpermite soluciones discontinuas, al contrario que (2.1) para la que tanto a (x.t) comof (a (x, t)) deben ser suficientemente suaves. El hecho de poder encontrar solucionesdiscontinuas es una gran ventaja para la modelización de muchos problemas físicosen los que pueden apareces discontinuidades. En particular, para el caso de flujocompresible, la forma integral permite encontrar soluciones con ondas de choqueque la ecuación diferencial clásica no acepta.
Si en la ley de conservación, se tiene f (a (x, t)) = ua (x, t), con u constante,se obtiene la ecuación escalar de advección, dado que modela la advección de unasustancia en un fluido con velocidad u
at + uax = 0 (2.3)
Dado que la velocidad u es constante, se puede escribir
(1 u)
ax
at
!= 0 (2.4)
lo que significa que el gradiente en el espacio-tiempo de a (x, t) es ortogonal al vectorconstante (1 u). Por lo que a es constante a lo largo de las líneas paralelas a ese vectorconstante, es decir
a (x0 + u⌧, t0 + ⌧) = 0 8 (x0, t0) 8⌧ (2.5)
Tomando ⌧ = t� t0
a (x0 + u (t� t0) , t) = a (x0 � ut0, 0) (2.6)
Y eligiendo x0 = x� u (t� t0)
a (x, t) = a (x� ut, 0) (2.7)
12

2.1 Ecuaciones hiperbólicas
Figura 2.1: Solución de la ecuación de advección.
Esta ecuación representa la solución de la ecuación de advección (2.3). Las líneasde la forma x� ut = cte son las curvas características y a lo largo de ellas la soluciónes constante (figura (2.1)).
2.1.2. Sistemas lineales hiperbólicos
Aunque el objeto de esta tesis es la resolución de las ecuaciones de Euler, quees un sistema no lineal, el estudio de sistemas lineales permite entender la base delos métodos utilizados. A continuación se estudia la estructura característica de lossistemas lineales hiperbólicos con coeficientes constantes y en particular la soluciónal problema de Riemann, que como se verá más adelante es la base del método deGodunov.
Un sistema lineal hiperbólico con coeficientes constantes es un sistema de ecua-ciones diferenciales de la forma
at + Bax = 0 (2.8)
donde B 2 Rm⇥m es una matriz diagonalizable con coeficientes constantes y convalores propios reales, por lo que se puede escribir
B = R⇤R�1 (2.9)
13

2 TEORÍA MATEMÁTICA
donde R es la matriz de vectores propios derechos. Haciendo w = R�1a, se tiene
wt + ⇤wx = 0 (2.10)
que son m ecuaciones de advección desacopladas.
Si se considera el problema de Cauchy del sistema anterior, con condición iniciala (x, 0), se obtiene un sistema desacoplado análogo a (2.10) con condición inicialw (x, 0) = R�1a (x, 0) y donde la p�ecuación de advección viene dada por
wpt + �pwp
x = 0 (2.11)
donde �p es el p�ésimo valor propio de B. La solución de esta ecuación de advecciónes
wp(x, t) = wp
(x� �pt, 0) (2.12)
Es decir, wp(x, t) ⌘ w (x0) a lo largo de la curva X (t) = x0 + �pt. Estas curvas se
llaman p�características.
Entonces se puede escribir
a (x, t) =
mX
p=1
wp(x, t) rp (2.13)
por lo que se puede ver el vector a (x, t) como una combinación lineal de vectorespropios r1, ..., rm y por tanto, como la superposición de m ondas diferentes viajandoa velocidad �p. Los escalares wp
(x, t) son los coeficientes de cada vector propio encada punto, definiendo la importancia de cada onda. Dado que wp
(x, t) es constantea lo largo de las p�características, estas funciones se llaman variables características.
Utilizando los vectores propios derechos de B se puede escribir wp(x, t) = lpa (x, t),
por lo que se puede escribir (2.13) como
a (x, t) =
mX
p=1
lpa (x, t) rp =mX
p=1
lpa (x� �pt, 0) rp (2.14)
14

2.1 Ecuaciones hiperbólicas
2.1.3. El problema de Riemann
El problema de Riemann consiste en la ecuación hiperbólica junto a una condicióninicial constante a trozos con una discontinuidad, es decir
a (x, 0) =
8<
:al si x < xc
ar si x > xc
(2.15)
donde sin pérdida de generalidad se asumirá en adelante xc = 0.
Para el caso de sistemas de ecuaciones hiperbólicas lineales con coeficientes cons-tantes se ha visto que se puede escribir en términos de las variables características,por lo que
al =mX
p=1
wpl r
p , ar =mX
p=1
wprr
p (2.16)
por lo que cada p�ecuación de advección tiene el problema de Riemann
wp(x, 0) =
8<
:wp
l si x < 0
wpr si x > 0
(2.17)
y la discontinuidad simplemente se propaga con velocidad �p
wp(x, t) =
8<
:wp
l si x� �pt < 0
wpr si x� �pt > 0
(2.18)
Se puede escribir entonces la solución a (x, t) en función de si la p�onda viajahacia la izquierda o hacia la derecha como
a (x, t) =X
�p<x
t
wprr
p+
X
�p>x
t
wpl r
p (2.19)
Obsérvese (figura (2.2)) que al cruzar la p�característica, el valor x��pt pasa por0, por lo que wp pasa de wp
l a wpr , manteniéndose constante el resto de coeficientes
wi(i 6= p), es decir, a través de la p�característica
(wpl � wp
r) rp= ↵prp (2.20)
15
2 TEORÍA MATEMÁTICA
x = !1t x = !2t x = !3t
X " !3T X � !2T X " !1T
(X,T )
0
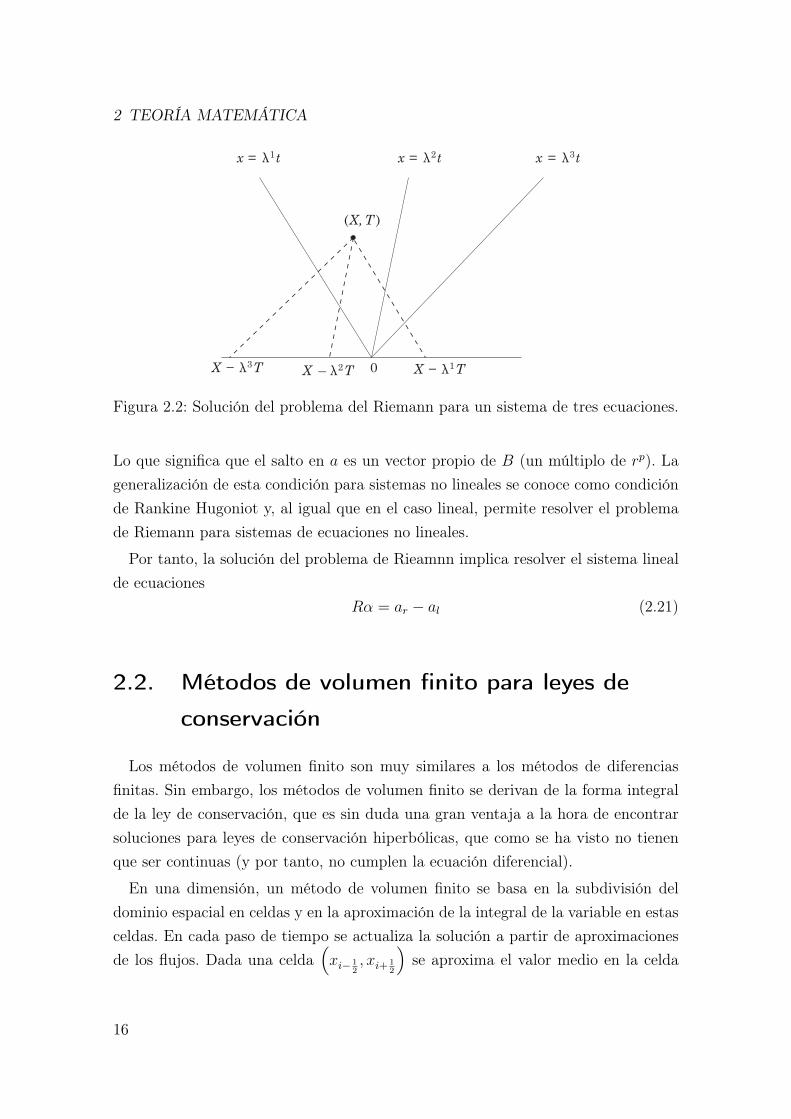
Figura 2.2: Solución del problema del Riemann para un sistema de tres ecuaciones.
Lo que significa que el salto en a es un vector propio de B (un múltiplo de rp). Lageneralización de esta condición para sistemas no lineales se conoce como condiciónde Rankine Hugoniot y, al igual que en el caso lineal, permite resolver el problemade Riemann para sistemas de ecuaciones no lineales.
Por tanto, la solución del problema de Rieamnn implica resolver el sistema linealde ecuaciones
R↵ = ar � al (2.21)
2.2. Métodos de volumen finito para leyes de
conservación
Los métodos de volumen finito son muy similares a los métodos de diferenciasfinitas. Sin embargo, los métodos de volumen finito se derivan de la forma integralde la ley de conservación, que es sin duda una gran ventaja a la hora de encontrarsoluciones para leyes de conservación hiperbólicas, que como se ha visto no tienenque ser continuas (y por tanto, no cumplen la ecuación diferencial).
En una dimensión, un método de volumen finito se basa en la subdivisión deldominio espacial en celdas y en la aproximación de la integral de la variable en estasceldas. En cada paso de tiempo se actualiza la solución a partir de aproximacionesde los flujos. Dada una celda
⇣xi� 1
2, xi+ 1
2
⌘se aproxima el valor medio en la celda
16

2.2 Métodos de volumen finito para leyes de conservación
por
ani ⇡1
4x
ˆ xi+1
2
xi� 1
2
a (x, t) dx (2.22)
donde 4x = xi+ 12� xi� 1
2.
El hecho de trabajar con valores medios en celda permite asegurar obtener méto-dos conservativos en el mismo sentido que la solución física. Es decir, la suma de lasvariables promedio en celda en todo el dominio cambia únicamente debido al flujoen las fronteras.
La forma integral de una ley de conservación tiene la forma
d
dt
ˆ xi+1
2
xi� 1
2
a (x, t) dx = f⇣a⇣xi� 1
2, t⌘⌘� f
⇣a⇣xi+ 1
2, t⌘⌘
(2.23)
Con esta expresión y (2.22) se puede obtener el valor promedio de las celdas en elinstante tn+1, an+1
i , a partir de los valores en el instante tn, ani . Integrando (2.22)entre tn y tn+1
ˆ xi+1
2
xi� 1
2
a (x, tn+1) dx�ˆ x
i+12
xi� 1
2
a (x, t) dx =
ˆ tn+1
tn
f⇣a⇣xi� 1
2, t⌘⌘
dt�ˆ t
n+1
tn
f⇣a⇣xi+ 1
2, t⌘⌘
dt
(2.24)que reorganizando y dividiendo por 4x da
14x
´ xi+1
2xi� 1
2
a (x, tn+1) dx =
14x
´ xi+1
2xi� 1
2
a (x, t) dx
+
14x
⇣´ tn+1
tn
f⇣a⇣xi� 1
2, t⌘⌘
dt�´ t
n+1
tn
f⇣a⇣xi+ 1
2, t⌘⌘
dt⌘
(2.25)Esta relación indica la actualización del valor promedio en la celda en el paso de
tiempo 4t = tn+1� tn. En general, no se puede obtener el valor de las integrales delos flujos de forma exacta, pero sí se tiene una aproximación a estas integrales de laforma
fni� 1
2⇡ 1
4t
ˆ tn+1
tn
f⇣a⇣xi� 1
2, t⌘⌘
dt (2.26)
la ecuación (2.25) sugiere el uso de métodos numéricos de la forma
an+1i = ani +
4t
4x
⇣fni� 1
2� fn
i+ 12
⌘(2.27)
Dado que en el caso de los problemas hiperbólicos la información se transmite
17

2 TEORÍA MATEMÁTICA
con velocidad finita, parece razonable pensar que una buena aproximación al flujodependa únicamente de valores cercanos a la celda. Así que, se puede escoger unflujo numérico de la forma
fni� 1
2= F
�ani�k, ..., a
ni , ..., a
ni+l
�(2.28)
donde F es una función para aproximar el flujo y k y l representan el número deceldas vecinas aguas abajo y aguas arriba, respectivamente, que se utilizan para ob-tener el flujo numérico. Por ejemplo, si k = 1 y l = 0, se tiene fn
i� 12= F
�ani�1, a
ni
�,
que se trata de un método de tres puntos, llamado así porque la solución en el ins-tante tn+1 depende de tres puntos, ani�1, ani y ani+1. El método específico dependeráde la elección de esta función para aproximar el flujo numérico. En cualquier caso,se obtiene así un método que es conservativo en el sentido que se adelantaba, puessumando 4x ·an+1
i en un subconjunto de celdas {p, p+ 1, ..., q} del dominio, se tiene
4xqP
i=p
an+1i = 4x
qPi=p
ani +4t4x
qPi=p
fni� 1
2� fn
i+ 12
4xmPi=1
ani +4t⇣fnp� 1
2� fn
q+ 12
⌘ (2.29)
por lo que el cambio en el promedio de la solución numérica sólo depende de losflujos en los extremos. Es decir, si a representa la densidad de un fluido, el cambiode masa sólo depende del flujo a la entrada y la salida.
2.2.1. Convergencia
Para que el método sea adecuado para la resolución de problemas numéricos, elmétodo debe ser convergente, es decir que converja a una solución cuando se refinala malla. Sin entrar en detalle, se introducen dos condiciones que serán impotantesmás adelante. Para que el método sea convergente, se requiere:
El método debe ser consistente con la ecuación, es decir que la aproxima ade-cuadamente localmente. En particular, si la función a (x, t) ⌘ a es constante enx , entonces a no cambia en el tiempo y el flujo es simplemente f (a). Por lo que,si ani�k = ... = ani = ... = ani+l = a, entonces el flujo numérico debe ser f (a), esdecir, F (a, ..., a, ..., a) = f (a). Además, se pide cierta continuidad, en el senti-do de que si ani�k, ..., a
ni , ..., a
ni+l ! a, entonces F
�ani�k, ..., a
ni , ..., a
ni+l
�! f (a).
18

2.2 Métodos de volumen finito para leyes de conservación
Para ello, normalmente se pide que la función de flujo numérico sea Lipschitzcontinua en todos los puntos de los que depende la función del flujo. Es decir
��F�ani�k, ..., a
ni , ..., a
ni+l
�� f (a)
�� Lmax
���ani�k � a�� , ..., |ani � a| , ...,
��ani+l � a���
(2.30)
El método debe ser estable, lo que significa que el error en un paso de tiempono crezca muy rápido en pasos de tiempo posteriores. La condición más impor-tante en este aspecto es la condición CFL, que es una condición necesaria perono suficiente. La condición CFL establece que un método numérico puede serconvergente sólo si el dominio de dependencia numérico contiene el dominiode dependencia real de la ecuación diferencial cuando la malla se refina.
En el caso de las ecuaciones de Euler para fluidodinámica en una dimensión,la máxima velocidad de propagación está acotada por |u| + c donde u es lavelocidad del fluido y c es la velocidad del sonido. La condición CFL pide queen cada paso de tiempo no se pierda información en las celdas, por lo que elpaso de tiempo debe ser
(|u|+ c)4t
4x 1 (2.31)
2.2.2. Método de Godunov
En los años 50, Godunov presentó un método numérico para resolver las ecuacionesde Euler basado en la idea de reconstruir una función constante a trozos a (x, tn)
definida a partir de los ani y obtener a (x, tn+1) resolviendo los problemas de Riemannen las fronteras de las celda. El método de Godunov ha sido ampliamente utilizadoy mejorado en fluidodinámica desde su aparición debido a los buenos resultados queda, especialmente a la hora de resolver ondas de choque en flujo compresible.
2.2.2.1. Flujo numérico del método de Godunov
Como ya se ha indicado, la determinación de los flujos en la ecuación (2.27) deter-mina el tipo de método numérico utilizado. El flujo numérico aproxima el promedio
19

2 TEORÍA MATEMÁTICA
del flujo real en el paso de tiempo 4t mediante
fni� 1
2⇡ 1
4t
ˆ tn+1
tn
f⇣a⇣xi� 1
2, t⌘⌘
dt (2.32)
La integral de (2.32) no se puede evaluar exactamente y por eso se necesita unaaproximación. La idea de Godunov consiste en sustituir la función a (x, t) por unafunción constante a trozos definida a partir de los ani , lo que define un problema deRiemann con valores izquierda y derecha en cada frontera de celda. La solución delproblema de Riemann es conocida a lo largo de los rayos
x�xi� 1
2t�t
n
= cte, por lo que
la solución enx�x
i� 12
t�tn
= cte corresponde a a⇣xi� 1
2, t⌘
(en adelante se utilizará la
notación a⇤i� 1
2= a
⇣xi� 1
2, t⌘). De esta manera, el flujo en un método de Godunov se
obtiene a partir de las soluciones del problema de Riemann en las caras
fni� 1
2⇡ 1
4t
ˆ tn+1
tn
f⇣a⇣xi� 1
2, t⌘⌘
dt = f⇣a⇤i� 1
2
⌘(2.33)
Después de la idea original de Godunov, el método se ha generalizado para obtenermayor orden, de forma que en lugar de definir una función constante a trozos a partirde los promedios en las celdas, se obtiene una función polinómica a trozos a partirde la cual se obtienen los valores izquierda y derecha que definen el problema deRiemann en cada cara de celda. Éste es el caso del PPM, método utilizado en estatesis, que utiliza reconstrucciones parabólicas a trozos (ver capítulo (3)).
2.3. Importancia de la forma conservativa
En esta sección se verá la importancia de que el método numérico sea conservativoa la hora de tratar leyes de conservación y la gran ventaja que presenta el método deGodunov a la hora de resolver las ecuaciones de Euler, pues se tiene la confianza deque en caso de que el método converja a una solución, ésta será una solución débilque además cumpla el segundo principio de la termodinámica.
20

2.3 Importancia de la forma conservativa
2.3.1. Ley de conservación escalar no lineal. Solución débil
Sea la ley de conservación escalar no lineal, que se puede escribir como
at + f (a)x = 0 (2.34)
Si f (a) = ua con u constante, entonces se tiene la ecuación de advección. En cambio,si f (a) es no lineal, la solución ya no es simplemente el transporte uniforme, sinoque el transporte cambia y en particular pueden surgir ondas de choque, dondela solución es discontinua. En esos puntos la ecuación (2.34) no se cumple en unsentido clásico. En cambio, la forma integral de ésta sí se cumple incluso cuando a
es discontinua. En general, se dice que una función a (x, t) es una solución de la leyde conservación si se cumple la forma integral de (2.34), es decir si para cualesquierax1, x2 se cumple ˆ x2
x1
@a (x, t)
@tdx = fx1 (a)� fx2 (a) (2.35)
Por otra parte, integrando en espacio y tiempo la ecuación (2.34) se tiene
ˆ t2
t1
ˆ x2
x1
[at + f (a)x] dxdt = 0 (2.36)
En lugar de considerar esta integral para cualesquiera t1, t2, x1 y x2, se puedeconsiderar ˆ 1
0
ˆ 1
�1[at + f (a)x]� (x, t) dxdt = 0 (2.37)
para cierto conjunto de funciones � (x, t). En particular, si se toma � (x, t) como
� (x, t) =
8<
:1 si (x, t) 2 [x1, x2]⇥ [t1, t2]
0 e.o.c.(2.38)
entonces la integral (2.37) se reduce a (2.36). Se puede generalizar esta noción acualquier � (x, t) que tenga soporte compacto. Si además se asume � (x, t) suave,entonces se puede integrar (2.37) por partes
ˆ 1
0
ˆ 1
�1[a�t + f (a)�x] dxdt = �
ˆ 1
0
a (x, 0)� (x, 0) dx (2.39)
Obsérvese que las derivadas están ahora en � y no en a o en f (a), por lo que
21
2 TEORÍA MATEMÁTICA
(2.39) tiene sentido incluso si a es discontinua.
Definición. La función a (x, t) es una solución débil de la ley de conservación(2.34) con condición inicial a (x, 0) si se cumple (2.39) para cualquier función �
continua y diferenciable con soporte compacto.
2.3.2. Un método no conservativo erróneo
En la sección (2.2) se ha deducido la forma conservativa de un método de volumenfinito basado en la forma integral de la ley de conservación. Para soluciones débilesen las que existen discontinuidades, la forma integral resulta más satisfactoria que laforma diferencial. Por ello, parece lógico pensar que un método basado en la formaintegral se debe comportar mejor que uno basado en la forma diferencial cuandose tienen discontinuidades. A continuación se muestra un ejemplo que se puedeencontrar en (26) de este hecho.
Considérese la ecuación de Burgers
at +1
2
�a2�x= 0 (2.40)
Si a > 0 en todo el dominio, entonces el método de Godunov toma la forma
an+1i = ani +
4t
4x
✓1
2
�ani�1
�2 � 1
2
(ani )2
◆(2.41)
Por otro lado, la ecuación (2.40) se puede transformar en at + aax = 0, de dondese puede deducir el método upwind dado por
an+1i = ani +
4t
4xani�ani�1 � ani
�(2.42)
En regiones donde la solución es suave, ambos métodos dan soluciones similares.Sin embargo, cuando la solución tiene una onda de choque, el método de Godunovda una solución difusiva en la onda de choque, pero está bien localizada. En cambio,el método (2.42) falla en la resolución de la onda de choque claramente.
22

2.3 Importancia de la forma conservativa
2.3.3. Teorema de Lax-Wendroff
Puesto que los métodos de volúmenes finitos conservativos se derivan de la ecua-ción integral, parece razonable pensar que la aproximación que se obtenga a partirde ellos sea una solución débil de la ley de conservación. El teorema de Lax-Wendroffestablece precisamente esto, en el sentido de que si la aproximación converge a lafunción a (x, t) cuando se refina la malla (4t! 0, 4x! 0), entonces esta funciónes una solución débil de la ley de conservación. El teorema no garantiza la conver-gencia ni la unicidad de la solución, pero da cierta confianza en la solución obtenida.A continuación se da una demostración del teorema que se puede encontrar en (26).
Teorema de Lax-Wendroff. Sea una secuencia de mallas dadas por los índi-ces j = 1, 2, 3..., con parámetros de malla 4t(j), 4x(j) ! 0 cuando j ! 1. Seaa(j) (x, t) la aproximación numérica obtenida con un método conservativo y consis-tente en la malla j. Si a(j) converge a la función a cuando j !1, entonces a (x, t)
es una solución débil de la ley de conservación.Para probar el teorema, en primer lugar se debe definir lo que se entiende por
método consistente y por convergencia.Un método es consistente si el flujo numérico asociado es consistente en el sentido
de (2.30)Por otro lado, se dice que una secuencia de aproximaciones a(j) converge a a (x, t)
si:
1. En todo dominio ⌦ = [a, b]⇥ [0, T ]
��a(j) � a��1,⌦
=
ˆ T
0
ˆ b
a
��a(j) (x, t)� a (x, t)�� dxdt! 0 cuando j !1 (2.43)
2. Para todo T , existe un R > 0 tal que
TV�a(j) (·, t)
�=
1X
i=1
���a(j)i (t)� a(j)i�1 (t)
��� < R para todo 0 t T , j = 1, 2, 3, ...
(2.44)
Demostración. Hay que ver que a (x, t) satisface la formulación débil, es decir quepara todo � 2 C1
0
ˆ 1
0
ˆ 1
�1[�ta+ �xf (a)] dxdt = �
ˆ 1
�1� (x, 0) a (x, 0) dx (2.45)
23

2 TEORÍA MATEMÁTICA
Se define la función test discreta como �(j)ni = �
⇣x(j)i , t
(j)n
⌘donde
⇣x(j)i , t
(j)n
⌘es
un punto de la malla j. Por lo que si se multiplica el método conservativo por estafunción
�(j)ni a
(j)n+1i = �
(j)ni a
(j)ni +
4t
4x�(j)ni
⇣fni� 1
2� fn
i+ 12
⌘(2.46)
lo cual es cierto para todo punto de la malla j. Por lo que sumando en todos los i yn � 0, se obtiene
1X
n=0
1X
i=�1
�(j)ni
⇣a(j)n+1i � a
(j)ni
⌘= �4t
4x
1X
n=0
1X
i=�1
�(j)ni
⇣fni� 1
2� fn
i+ 12
⌘(2.47)
Recombinando los términos de forma análoga a como se hace la integración porpartes, se puede sumar por partes mediante la expresión
mPi=1
bi (ci � ci�1) = bmcm �
b1c0�m�1Pi=1
(bi+1 � bi) ci en ambos lados de (2.47)
1X
n=0
1X
i=�1
�(j)ni
⇣a(j)n+1i � a
(j)ni
⌘= �
1X
i=�1
�(j)0i a
(j)0i �
1X
n=1
1X
i=�1
⇣�(j)ni � �
(j)n�1i
⌘a(j)ni
(2.48)
�4t
4x
1X
n=0
1X
i=�1
�(j)ni
⇣fni� 1
2� fn
i+ 12
⌘= �4t
4x
1X
n=0
1X
i=�1
⇣�(j)ni+1 � �
(j)ni
⌘fni� 1
2(2.49)
donde se ha tenido en cuenta que � tiene soporte compacto, por lo que �(j)ni = 0
para i y n suficientemente altos, de forma que los términos en estas fronteras sonnulos.
Igualando, reordenando términos y multiplicando por 4x se tiene
4x4t
1Pn=1
1Pi=�1
✓�(j)ni
��(j)n�1i
4t
◆a(j)ni
+
1Pn=0
1Pi=�1
✓�(j)ni+1 ��
(j)ni
4x
◆fni� 1
2] = �4x
1Pi=�1
�(j)0i a
(j)0i
(2.50)
Si j !1)4t(j),4x(j) ! 0, se obtiene el resultado buscado.
Teniendo en cuenta que � es suave y la condición de convergencia (2.43), se tiene
24

2.3 Importancia de la forma conservativa
que
4x4t
1X
n=1
1X
i=�1
�(j)ni � �
(j)n�1i
4t
!a(j)ni
j!1���!ˆ 1
0
ˆ 1
�1�tadxdt (2.51)
Si a(j)0i se toman como los promedios en celda de a (x, 0), entonces
�4x
1X
i=�1
�(j)0i a
(j)0i
j!1���! �ˆ 1
�1� (x, 0) a (x, 0) dx (2.52)
Y únicamente queda por ver la convergencia del término de los flujos, para loque hay que usar las condiciones de consistencia y de variación total (2.44). Por lacondición de consistencia, se tiene
���f (j)n
i� 12
� f⇣a(j)ni
⌘��� L���a(j)ni � a
(j)ni�1
��� (2.53)
donde L es la constante de Lipschitz para el flujo numérico.
Dado que a(j)n tiene variación total (2.44), se tiene que���f (j)n
i� 12
� f⇣a(j)ni
⌘���! 0 cuando j !1 (2.54)
en todos los i salvo en un conjunto de medida cero (en las discontinuidades). Usando(2.54) y la convergencia de a(j)n a a (2.43) se obtiene la convergencia del términoque faltaba en (2.50)
1X
n=0
1X
i=�1
�(j)ni+1 � �
(j)ni
4x
!fni� 1
2
j!1���!ˆ 1
0
ˆ 1
�1�xf (a) dxdt (2.55)
Dado que la elección de � 2 C10 es arbitraria, queda probado que a (x, t) es solución
débil de la ley de conservación.
25
2 TEORÍA MATEMÁTICA
2.3.3.1. Falta de unicidad y condiciones
entrópicas
Por desgracia, la solucion débil de una ley de conservación no es necesariamenteúnica. Sin embargo, físicamente se espera una única solución. Para poder obtenerla solución física adecuada, se debe añadir una condición inicial a la ecuación. Estetipo de condiciones se conocen como condiciones entrópicas. El nombre viene defluidodinámica, donde la segunda ley de la termodinámica impone que la entropíade un sistema debe ser no decreciente en el tiempo. A través de una onda de choquela entropía debe aumentar y no puede haber ondas de choque de expansión. Paraotras leyes de conservación es posible definir funciones similares a la entropía físicade un fluido.
En general una función entrópica debe ser una función que se conserva cuandoa (x, t) es suave, pero que tiene una fuente en las discontinuidades de a. Matemáti-camente, se quiere una función ⌘ (a) con un flujo entrópico (a) con la propiedadde que cuando a sea suave se cumpla una ley de conservación; y cuando a sea dis-continua la entropía en t2 sea menor o igual
´ x2
x1⌘ (a (x, t2)) dx
´ x2
x1⌘ (a (x, t1)) dx
+
´ t2t1 (a (x1, t)) dt�
´ t2t1 (a (x2, t)) dt
(2.56)
Por convención, se suele usar una función entrópica convexa, por lo que la inecuaciónes del tipo (en lugar de �, que es la que físicamente establece la segunda ley de latermodinámica para el caso de fluidodinámica).
Al igual que en el caso de las leyes de conservación, se puede dar una formulacióndébil de la condición entrópica. Así, una solución débil a satisface la formulacióndébil de la condición entrópica si
ˆ 1
0
ˆ 1
�1[�t⌘ (a) + �x (a)] dxdt+
ˆ 1
�1� (x, 0) ⌘ (a (x, 0)) dx � 0 (2.57)
para toda � 2 C10 con � (x, t) � 0. El hecho de pedir que � sea no negativa se debe
a la desigualdad.
26

2.3 Importancia de la forma conservativa
2.3.4. Consistencia entrópica del método de Godunov
Para el método de Godunov se puede probar que la condición entrópica siemprese cumple si la solución del problema de Riemann para definir el flujo satisface lacondición entrópica. Para ver esto, es decir, que la solución débil a (x, t) obtenidacomo el límite de a(j) satisface (2.57), basta ver que la versión discreta se cumple
⌘⇣a(j)n+1i
⌘ ⌘
⇣a(j)n+1i
⌘+
4t
4x
⇣ ni� 1
2� n
i+ 12
⌘(2.58)
donde ni� 1
2=
�ani�1, a
ni
�es un flujo numérico consistente con . Si se puede
demostrar (2.58), haciendo un razonamiento totalmente análogo al del teorema deLax-Wendroff, se demuestra que la solución débil a (x, t) obtenida como el límitecuando se refina la malla satisface la forma débil de la condición entrópica (2.57).
Sean entonces an (x, tn) la función constante a trozos construida a partir de losvalores a(j)n en la malla j y an (x, tn+1) la solución exacta a la ley de conservación,la cual se promedia en la malla j, obteniéndose a(j)n+1. Lo que se requiere entonceses que la función an (x, t) satisfaga la condición entrópica. De (2.56) integrando enel rectángulo
⇣xi� 1
2, xi+ 1
2
⌘⇥ (tn, tn+1)
´ xi+1
2xi� 1
2
⌘ (an (x, tn+1)) dx ´ x
i+12
xi� 1
2
⌘ (an (x, tn)) dx
+
´ tn+1
tn
⇣an⇣xi� 1
2, t⌘⌘
dt�´ t
n+1
tn
⇣an⇣xi+ 1
2, t⌘⌘
dt
(2.59)que dividiendo por 4x da
1
4x
ˆ xi+1
2
xi� 1
2
⌘ (an (x, tn+1)) dx ⌘⇣a(j)ni
⌘+
4t
4x
⇣ ⇣a⇤i� 1
2
⌘�
⇣a⇤i+ 1
2
⌘⌘(2.60)
donde a⇤i� 1
2representa el valor del problema de Riemann en la cara i� 1
2 . Si se defineel flujo entrópico numérico como
i� 12=
⇣a⇤i� 1
2
⌘(2.61)
entonces es consistente con y casi se ha obtenido (2.58).
El término izquierdo de (2.60) no es igual a ⌘⇣a(j)n+1i
⌘, que es lo que se necesita
para acabar la demostración. Sin embargo, dado que ⌘ es convexa con ⌘00 (a) > 0
27
2 TEORÍA MATEMÁTICA
por definición, se puede usar la desigualdad de Jensen, obteniéndose
⌘
0
@ 1
4x
ˆ xi+1
2
xi� 1
2
an (x, tn+1) dx
1
A 1
4x
ˆ xi+1
2
xi� 1
2
⌘ (an (x, tn+1)) dx (2.62)
donde el término de la izquierda es precisamente ⌘�ai
(j)n+1�. Sustituyendo en (2.60)
se obtiene precisamente (2.58). Por lo que el método de Godunov satisface la con-dición entrópica siempre que la solución del problema de Riemann la satisfaga.
28

3 PPM
En este capítulo se presenta el esquema Piecewise Parabolic Method (PPM), quees el esquema utilizado en este trabajo para la resolución de las ecuaciones de Eulerpara un único fluido. El esquema PPM es un método de Godunov de alto ordenampliamente usado en simulaciones fluidodinámicas por sus buenos resultados. Laprincipal característica de PPM es la interpolación parabólica de las variables en lasceldas, lo que permite una mejor representación de los gradientes y discontinuidades.
Al igual que en el artículo original (16), se comenzará describiendo el PPM para laecuación escalar de advección en una dimensión; posteriormente se analizará el casofluidodinámico en una dimensión y por último el operador unsplit utilizado para eneste trabajo (14).
3.1. PPM para la ecuación de advección
Se describe aquí el PPM para la ecuación lineal de advección:
@a@t
+ u@a@x
= 0
a (x, 0) = a0 (x)(3.1)
De aquí en adelante se asumirá una malla uniforme de N puntos cuya posiciónespacial viene dada por xi (i = 1...N), con �x = xi+1 � xi.
Sea xi+ 12
la frontera entre la celda i la i + 1,entonces en el instante tn se suponeconocido el valor medio de a en la celda i:
ani =
1�x
´ xi+1
2xi� 1
2
a (x, tn) dx (3.2)
Entonces se quiere calcular el valor an+1i , el valor de la solución en el instante
tn+1= tn +4t. PPM sigue entonces el esquema de Van Leer tomando la parábo-
la como función interpoladora. Primero se construye una función de interpolaciónpolinomial a trozos a (x) que satisfaga la condición
29

3 PPM
ani =
1
�x
ˆ xi+1
2
xi� 1
2
a (x) dx
El esquema queda unívocamente determinado por la elección del polinomio deinterpolación, que en este caso es una parábola en cada celda dada por:
a (�) = aL,i + � (4ai + a6,i (1� �))
� =
x�xi� 1
24x
, xi� 12 x xi+ 1
2
(3.3)
Donde los valores de los coeficientes se pueden escribir en función de los valorespromedios en celda, ani , y los valores en las fronteras izquierda y derecha de lasceldas, aL,i = lım a (x)
x!x�i� 1
2
y aR,i = lım a (x)x!x+
i+12
:
4ai = aR,i � aL,i , a6,i = 6
✓ani �
1
2
(aL,i + aR,i)
◆(3.4)
Para calcular los valores en las fronteras de las celdas, aL,i y aR,i, se utiliza unainterpolación sujeta a la condición de que los valores ai+ 1
2estén entre los valores ai
y ai+1. En las zonas en las que se puede asumir a (x) suave, entonces aR,i = aL,i+1 =
ai+ 12. Además, posteriormente se modifican los valores de aL,i y aR,i para que la
parábola a (�) sea monótona en cada celda.
Dados los valores ani , se aproxima ai+ 12
a partir de la única cúbica cuyos valores pro-medios en las cuatro celdas más próximas a la frontera correspondiente coincide conlos de la solución. Es decir, para calcular ai+ 1
2dados los valores promedios en celda ani
y designando los valores promedios acumulados como A⇣xi+ 1
2
⌘= Ai+ 1
2=
Pkj
ank�x,
se halla la cuártica que pasa por los puntos⇣xi+ 1
2+k, Ai+ 12+k
⌘k = {0,±1,±2} y
luego se deriva y se evalúa en i + 12 , obteniéndose ai+ 1
2=
dAdx
|xi+1
2
. Asumiendo, sinpérdida de generalidad, 4x = 1
A (x) = ↵4x4+ ↵3x
3+ ↵2x
2+ ↵1x+ ↵0
30

3.1 PPM para la ecuación de advección
0
BBBBBBBBB@
A⇣xi� 3
2
⌘
A⇣xi� 1
2
⌘
A⇣xi+ 1
2
⌘
A⇣xi+ 3
2
⌘
A⇣xi+ 5
2
⌘
1
CCCCCCCCCA
=
0
BBBBBB@
A (�2)A (�1)A (0)
A (1)
A (2)
1
CCCCCCA=
0
BBBBBB@
16 �8 4 �2 1
1 �1 1 �1 1
0 0 0 0 1
1 1 1 1 1
16 8 4 2 1
1
CCCCCCA
0
BBBBBB@
↵4
↵3
↵2
↵1
↵0
1
CCCCCCA
de donde ↵1 =dAdx
|xi+1
2
= ai+ 12. Por lo que,
ai+ 12=
7
12
�ani + ani+1
�� 1
12
�ani+2 + ani�1
�(3.5)
En la mayor parte de las fronteras, esta última expresión será con la que se obtengael valor de aR.i = aL,i+1. Sin embargo, existen dos casos en los que esta asignacióndaría lugar a una función interpoladora en la celda no monótona. El primero deestos casos es cuando ani es un máximo o mínimo local, en cuyo caso la funcióninterpoladora se hace constante (para poder mantener la monotonía en la celda).En este caso, las pendientes de la primera y segunda mitad de la celda tienen signocontrario,
aL,i ! ani , aR.i ! ani si (aR,i � ani ) (ani � aL,i) 0 (3.6)
El segundo caso es cuando ani se encuentra entre aL,i y aR,i pero suficientementepróximo a uno de los dos valores, de forma que la parábola interpoladora no seamonótona en la celda. Es decir, que la parábola alcanza máximo o mínimo dentrode la celda y cerca de uno de los extremos, por lo que la derivada se anula en unpunto dentro de la celda,
a (�) = aL,i + � (4ai + a6,i (1� �))) a0 (�) = �ai + a6,i � 2a6,i�
a0 (�) = 0) � =
4ai + a6,i2a6,i
La condición de que este punto no esté dentro de la celda es que no esté en elintervalo 0 � 1,
31

3 PPM
4ai
+a6,i2a6,i
� 1 ) 4ai � a6,i4a
i
+a6,i2a6,i
0 ) 4ai �a6,i
Por lo que la condición de no tener un extremo relativo dentro de la celda es |4ai| �|ai,6|. Cuando esta condición no se satisface, el valor de la frontera más lejana alextremo se cambia, de forma que la derivada de la parábola en la frontera cercanaal extremo sea nula. Es decir, el extremo de la parábola pasa a estar en la frontera,
4ai < a6,i ) a0 (1) = 4ai � a6,i = 0
) aR,i � aL,i � 6
�ani � 1
2 (aL,i + aR,i)�= 0
) aL,i = 3ani � 2aR,i
4ai > �a6,i ) a0 (0) = 4ai + a6,i =
) aR,i � aL,i + 6
�ani � 1
2 (aL,i + aR,i)�= 0
) aR,i = 3ani � 2aL,i
Por lo que,
aL,i ! 3ani � 2aR,i si4ai < a6,i
aR,i ! 3ani � 2aL,i si4ai > a6,i(3.7)
Teniendo en cuenta los ajustes para que la parábola sea monótona en la celda, elcálculo de aL,i y aR,i se puede resumir de la siguiente manera
aL,i ! ai� 12aR,i ! ai+ 1
2
aL,i ! ani aR,i ! ani si (aR,i � ani ) (ani � aL,i) 0
aL,i ! 3ani � 2aR,i si (aR,i � aL,i)�ani � 1
2 (aL,i + aR,i)�>
(
aR,i
�aL,i
)
2
6
aR,i ! 3ani � 2aL,i si (aR,i � aL,i)�ani � 1
2 (aL,i + aR,i)�<
(
aR,i
�aL,i
)
2
6
(3.8)Una vez obtenidos los valores de las interpolaciones en las fronteras de las celdas,
el cálculo de an+1i es sencillo. Usando la función parabólica a trozos a(x), se toman
valores medios a lo largo del intervalo que se advecta y con ellos se obtienen losflujos con los que se actualizan los valores.
ai+ 12 ,L
(y) =
1y
´ xi+1
2xi+1
2�y a (x) dx
ai+ 12 ,R
(y) =
1y
´ xi+1
2+y
xi+1
2
a (x) dx
32

3.1 PPM para la ecuación de advección
de donde, integrando y dejando en función de los coeficientes calculados en cadacelda,
ai+ 12 ,L
(y) = aR,i �x2
�4ai �
�1� 2
3x�a6,i�
para x =
y4x
ai+ 12 ,R
(y) = aL,i+1 +
x2
�4ai+1 �
�1� 2
3x�a6,i+1
�para x =
y4x
(3.9)
Por lo que el cálculo de la solución en el siguiente paso de tiempo en formaconservativa
an+1i = ani + u
4t
4x
⇣fi� 1
2� fi+ 1
2
⌘(3.10)
donde
fi+ 12=
8<
:ai+ 1
2 ,L(u4t) si u � 0
ai+ 12 ,R
(�u4t) si u 0
Por último cabe destacar que el esquema de interpolación descrito se puede mo-dificar para mejorar la aproximación de discontinuidades. En este caso, cuando sedetecta un salto grande en la variable, la interpolación en las caras se cambia poruna interpolación lineal a trozos con la pendiente calculada de forma que ai+ 1
2se
encuentre entre los valores ani y ani+1
�mai =
8<
:sgn (�ai)mın (|�ai| , 2 |�bai| , 2 |�fai|) si �fai · �bai > 0
0 en otro caso(3.11)
donde�ai =
12
�ani+1 � ani�1
�
�bai =
�ni � ani�1
�
�fai =
�ani+1 � ani
�
Por lo que la interpolación lineal en las fronteras es
adL,i = ai�1 +1
2
�mai�1 adR,i = ai+1 �
1
2
�mai+1 (3.12)
Para hacer este cambio en las interpolaciones en las fronteras, se considera que unacelda está dentro de una discontinuidad si la aproximación de la tercera derivada essuficientemente grande, si la aproximación de la segunda derivada cambia de signoen la celda y si el salto es suficientemente grande. Además, las aproximaciones a
33

3 PPM
la tercera y a la primera derivada en la celda deben tener signo contrario. En lapráctica el cambio se hace de la siguiente forma
aL,i ! aL,i (1� ⌘i) + adL,i⌘i , aR,i ! aR,i (1� ⌘i) + adR,i⌘i (3.13)
donde⌘i = max
�0,mın
�⌘1�⌘i � ⌘2
�, 1��
(3.14)
Los parámetros ⌘1 y ⌘2 son constantes que dan lugar a un cambio continuo en lasinterpolaciones en las fronteras. Y ⌘i es una aproximación adimensional a la razónde la tercera derivada respecto al salto en la celda (primera derivada)
⌘i =
8>>><
>>>:
�⇣
�2ai+1��2a
i�1
24x
⌘⇣24x3
ai+1�a
i�1
⌘
si � �2ai+1 · �2ai�1 > 0 y |ai+1 � ai�1|� "mın (|ai+1| , |ai�1|) > 0
0 en otro caso
(3.15)
donde " es un parámetro que determina cómo de grande tiene que ser el salto paraser considerado una discontinuidad y �2ai es una aproximación a la segunda derivadaen la celda,
�2ai =1
34x
✓ai+1 � ai24x
� ai � ai�1
24x
◆
En (16), ⌘1 = 20, ⌘2 = 0,05 y " = 0,01.
3.2. PPM para Fluidodinámica en 1D
Se introduce aquí el esquema PPM para las ecuaciones de fluidodinámica en car-tesianas en una dimensión,
@U@t
+
@F@x
= S
U =
0
B@⇢
⇢u
⇢E
1
CA F (U) =
0
B@⇢u
⇢u2+ p
⇢uE + up
1
CA S =
0
B@0
⇢g
⇢ug
1
CA(3.16)
donde ⇢ es la densidad, u la velocidad, E la energía total del fluido, p la presión yg la aceleración de la gravedad.
El esquema Euleriano que se ha elegido en el presente trabajo para resolver este
34

3.2 PPM para Fluidodinámica en 1D
problema consiste en construir una función interpoladora parabólica a trozos de lasvariables necesarias, hallar valores izquierda y derecha en las fronteras de celda quese usan como entrada en un solver de Riemann, construir los flujos en las fronterasde las celdas a partir de las soluciones del solver de Riemann y actualizar las varia-bles. La construcción de los valores izquierda y derecha es la principal idea que sedesarrolla en esta sección. La construcción de estos valores presenta la dificultad deque la frontera de la celda puede ser atravesada por una, dos o tres características.Para solucionar este problema se define una primera aproximación de los valoresizquierda y derecha usando las velocidades características más grande y más peque-ña; a continuación se corrige esta aproximación mediante una linealización de lasecuaciones características.
En primer lugar se obtienen las funciones parabólicas a trozos a (x) (a = ⇢, u, p)
utilizando el esquema introducido en la sección anterior para la ecuación escalar deadvección y sin detector de discontinuidades salvo para la densidad. Para la densidadse usa el detector de discontinuidades siempre que en la celda i se cumpla, ademásde las condiciones ya expuestas,
�K0|⇢i+1 � ⇢i�1|
mın (⇢i+1, ⇢i�1)� |pi+1 � pi�1|
mın (pi+1, pi�1)(3.17)
Esta última condición asegura que el detector sólo se utiliza para discontinuidadesde contacto. Aquí K0 es una constante que estima cuánto más grande tiene que serel salto de densidad respecto al de presión para que se considere discontinuidad decontacto. Usualmente, K0 = 0,1.
Con las interpolaciones se define ahora la primera estimación de los valores iz-quierda y derecha, ai+ 1
2 ,Ly ai+ 1
2 ,R
ai+ 12 ,L
= ai+ 12 ,L
(max (0,4t (uni + cni )))
ai+ 12 ,R
= ai+ 12 ,R
�max
�0,�4t
�uni+1 � cni+1
��� (3.18)
a = ⇢, u, p
Sin embargo, esta estimación no es suficientemente buena, pues se está obviandola zona de la discontinuidad de contacto. Para construir buenos valores izquierday derecha se resuelven las ecuaciones de fluidodinámica en variables características,
35

3 PPM
!
"
#$ # %$%
& '
"()$)*+,-#
)$)*+,./ -()$)*+,.0)1)-)()$)*+,.0
-()$)*+,./)1)-)()$)*+,./
"()$)*+,)-)()$)*+,./
-#)$)*+,./
-()$)*+,./)1)-()$)*./
-()$)*+,./)1)-)()$)*+,./
2&34)35'367824 2&34)359:0367824
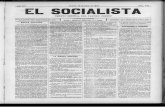
Figura 3.1: Esquema de las características en la frontera de celda
W = (⇢, u, p)t. Las ecuaciones son entonces,
@W@t
+ A@W@x
+G = 0
W =
0
B@⇢
u
p
1
CA A (W ) =
0
B@u ⇢ 0
0 u 1⇢
0 ⇢c2 u
1
CA G (W,x, t) =
0
B@
a⇢ux
�gac2⇢u
x
1
CA(3.19)
donde A tiene vectores propios izquierdos y derechos dados por (l�, r�, l0, r0, l+, r+)con valores propios �� = u� c, �0 = u y �+ = u+ c. Se toman los vectores propiosde forma que lk · rk0 = �kk0 donde k, k0
= �, 0,+.
En primer lugar, se define,
wki+ 1
2 ,L= wi+ 1
2 ,L(4t�k (U
ni ))
wki+ 1
2 ,R= wi+ 1
2 ,R
�4t�k
�Uni+1
�� (3.20)
w = ⇢, u, p
36

3.2 PPM para Fluidodinámica en 1D
Si �k (Uni ) > 0 (�k (U
ni ) < 0), entonces W k
i+ 12 ,L
⇣W k
i+ 12 ,R
⌘es el promedio de W
en la parte del dominio de dependencia de la k�característica en (tn, tn+1) a la
izquierda (derecha) de xi+ 12. Una vez obtenidas estas nuevas estimaciones, los valores
en las caras se obtienen quitando a ˜Wi+ 12 ,S
(S = L,R) las partes de las ondas de lak�familia que no cruzan xi+ 1
2en tn +4t. En el caso de calcular Wi+ 1
2 ,L, se resta
de ˜Wi+ 12 ,L
la cantidad lk ·⇣˜Wi+ 1
2 ,L�W k
i+ 12 ,L
+4tG⌘· rk para cada familia de ondas
para las que �k (Uni ) es positivo.
A continuación se obtiene U⇤i+ 1
2, la aproximación a 1
4t
´ tn+1
tnU⇣xi+ 1
2, t⌘dt a partir
de la solución del problema de Riemann en xi+ 12
definido por las variables Wi+ 12 ,L
yWi+ 1
2 ,R.
Por último se actualizan las variables conservadas,
Un+1i = Un
i +
4t4x
⇣F⇣U⇤i� 1
2
⌘� F
⇣U⇤i+ 1
2
⌘⌘+4t ¯Si
¯Si =12
0
B@0
⇢ni gni + ⇢n+1
i gn+1i
⇢ni uni g
ni + ⇢n+1
i un+1i gn+1
i
1
CA(3.21)
Nótese que esta definición del término fuente no hace el método implícito, ya que⇢n+1 no depende de un+1, ni un+1 de En+1.
3.2.1. Mecanismos Disipativos
En algunos problemas se ha visto que el esquema PPM genera un pequeño ruidotras ondas con velocidad pequeña en comparación con la velocidad tras la onda.Este problema se puede solventar añadiendo disipación al esquema. En esta secciónse estudian estos casos, así como la forma de solventarlos.
El típico problema en el que se producen los citados errores es el de una onda dechoque plana muy intensa. En este caso, el cálculo con PPM es muy estable, perose producen ciertas oscilaciones tanto en la entropía como en u� 2c
��1 , el invariantede Riemann a lo largo de la �característica, al atravesar la onda de choque. Elinvariante de Riemann a lo largo de la +característica, u +
2c��1 , se comporta bien;
cualquier error generado en esta variable es inmediatamente corregido en la onda dechoque. Esto refleja el hecho de que estos problemas se originan sólo para sistemasde ecuaciones.
Una técnica adecuada para eliminar este tipo de error en una gran cantidad de
37

3 PPM
casos es la de aplanar las interpolaciones en la cercanía de ondas de choque grandes.Es decir, reducir el orden del método localmente. De esta forma se define ⇣i, 0 ⇣i 1, de tal manera que la función de interpolación en la celda i sea a (x)·(1� ⇣i)+ani ⇣i,xi� 1
2 x xi+ 1
2, donde a (x) es la función de interpolación obtenida anteriormente.
Equivalentemente,aflatL,i = aL,i (1� ⇣i) + ani ⇣i
aflatR,i = aR,i (1� ⇣i) + ani ⇣i
aL,i ! aflatL,i , aR,i ! aflatR,i
(3.22)
en el límite ⇣i = 0, se tiene una interpolación constante a trozos en la celda, y portanto, un método de Godunov de primer orden.
Para métodos Lagrangianos, el esquema disipativo expuesto es suficiente parasolventar todos los problemas relacionados con falta de disipación. Sin embargo, paramétodos Eulerianos hay casos para los que el aplanamiento de la interpolación noes adecuado. Estos casos ocurren cuando una velocidad característica asociada conuna onda de choque grande se aproxima a cero (medida con respecto a la malla). Ladisipación introducida por el método de Godunov en la onda, medida por el númerode celdas con las que se representa la onda de choque, tiende a cero conforme lavelocidad de la onda de choque se anula.
Para solventar estos errores, se introduce una pequeña cantidad de disipaciónademás de la que se pueda obtener a partir del aplanamiento descrito anteriormente.La forma de hacerlo en el presente trabajo ha sido incluyendo un término difusivoadicional en el cálculo de los flujos,
Fi+ 12! Fi+ 1
2+ ⌫i+ 1
2(Ui � Ui+1) (3.23)
En este caso, ⌫i+ 12
es una velocidad que debe ser suficientemente grande sólo enla cercanía de ondas de choque. Así, se toma una velocidad proporcional a unaaproximación a la divergencia de la velocidad ~u en la dirección d,
⌫i+ 12 ,d
= K ·max
⇣� (D · ~u)i+ 1
2 ,d, 0⌘
(3.24)
en una dimensión,⌫i+ 1
2= K ·max (ui � ui+1, 0) (3.25)
El parámetro K regula la cantidad de disipación adicional que se añade. En el
38

3.3 Solver Unsplit
caso de PPM, esta cantidad es pequeña, tomándose usualmente K = 0,1.
3.3. Solver Unsplit
Para el desarrollo de este trabajo ya se ha comentado que se ha utilizado unoperador unsplit del PPM en dos dimensiones. Esta versión del PPM se puedeencontrar en (14). A excepción de la corrección debida a los flujos transversalespara el cálculo de las soluciones de los problemas de Riemann en las caras de lasceldas, los principios teóricos están expuestos en las secciones anteriores. Por ello, acontinuación se describe el solver unsplit sin entrar en más detalle.
En esta sección se utiliza la misma notación que en (14), por lo que las celdasse denotan con un único subíndice, i, y el superínice d hace referencia a una de lasdirecciones (en el caso de cartesianas x o y). Así, la celda (i+ 1, j) = i+ex y la cara�i, j + 1
2
�= i+ 1
2ey.
Las ecuaciones a resolver son las ecuaciones de Euler en 2D (por simplicidad, seven en coordenadas cartesianas), que se pueden escribir como
@U
@t+
@F
@x+
@G
@y= S (3.26)
donde
U =
2
66664
⇢
⇢u
⇢v
⇢E
3
77775, F =
2
66664
⇢u
⇢u2+ p
⇢vu
u (⇢E + p)
3
77775, G =
2
66664
⇢v
⇢uv
⇢v2 + p
v (⇢E + p)
3
77775(3.27)
y S es un término fuente que depende del problema que se vaya a resolver.El sistema (3.26) se puede transformar en un sistema en variables primitivas
�W = (⇢, u, v, p, ⇢e)t
�dado por
@W
@t+ Ax
(W )
@W
@x+ Ay
(W )
@W
@y= S 0 (3.28)
dondeAx
= rUW ·rUF ·rWU
Ay= rUW ·rUG ·rWU
S 0= rUW · S
(3.29)
39

3 PPM
Dada la solución y el término fuente en el instante de tiempo tn en cada celda, Uni ,
Sni , el solver calcula una aproximación de segundo orden de los flujos en las caras.
Para ello sigue los siguientes pasos:
Transformación a variables primitivas, W ni = W (Un
i ) e interpolación en lascaras mediante PPM en una dimensión.
Se calculan, por tanto, las pendientes�4dWi
�
4dWi = ⇣i�V L�4d
4Wi,4d�Wi,4d
+Wi
�
4d4Wi =
23
⇣�W � 1
44d2W�i+ed��W +
144
d2W�i�ed
⌘
4d2Wi = �V L
⇣˜4d
2Wi,4d�Wi,4d
+Wi
⌘
˜4d2Wi =
12
�W n
i+ed�W n
i�ed
�
4d�Wi = W n
i �W ni�ed
, 4d�Wi = W n
i+ed�W n
i
(3.30)
donde ⇣i es el flattening coefficient y �V L(↵1,↵2,↵3) es el límite de Van Leer
de (↵1,↵2,↵3) y que se calculan como
⇣i =
8><
>:
mın
d⇣di si
Pd
4d1u
di < 0
1 e.o.c.(3.31)
⇣di = mın3
⇣˜⇣di , d
⌘
˜⇣di = ⌘�4d
1pi,4d2pi,mın3 (K, d)
�
4d1p =
12 (pi+ed � pi�ed)
4d2p =
12
�4d
1pi+ed �4d1pi�ed
�
mın3 (f, d) = mın (fi+ed , fi, fi�ed)
⌘ (a1, a2, a3) =
8>>>><
>>>>:
0 si |a1|a0
> m y���a1a2��� > r1
1����a1a2
����r0
r1�r0si |a1|
a0> m y r1 �
���a1a2��� > r0
1 e.o.c.r0 = 0,75 , r1 = 0,85 , m = 0,33
(3.32)
donde K es el módulo de compresibilidad del fluido.
Y a continuación la interpolación en las caras de las celdas obtenidas con PPM.
40

3.3 Solver Unsplit
En primer lugar, las interpolaciones
W± =
1
2
�W n
i±ed +W ni
�± 1
12
�4d
2Wi �4d2Wi±ed
�(3.33)
con las que se calculan las amplitudes características
↵k± = lk · (W± �Wi) (3.34)
que se limitan con el limitador de PPM
↵k± =
8>>><
>>>:
↵k+ = s ·mın
�s↵k
+, 2s↵k��
si ↵k+ · ↵k
� < 0 y�↵k+
�2>�↵k��2
↵k� = �s ·mın
��s↵k
+, 2s↵k��
si ↵k+ · ↵k
� < 0y�↵k��2
>�↵k+
�2
0 si ↵k+ · ↵k
� � 0
(3.35)Y finalmente, se obtienen las interpolaciones en las fronteras de las celdas
Wi,±,d = W ni +
X
k
✓↵k± +
1
2
�k±�±�↵k� � ↵k
+
���↵k� + ↵k
+
� �3� 2�k
±��◆
rk
(3.36)donde
�k± =
8<
:±�k
d (Wni )
4t4xd
si ±�kd (W
ni ) > 0
max
⇣±�±
d (W ni )
4t4xd
, 0⌘
e.o.c.(3.37)
siendo �{+,�}d la máxima y la mínima velocidad de las ondas de todas las
familias de ondas. En el caso de las ecuaciones de Euler �+d = vd + c y ��
d =
vd � c.
Cálculo de los flujos unidimensionales para estimar la contribución transversal.Se calculan los flujos exactamente como si fuera una dimensión en ambasdirecciones. Es decir
F 1Di+ 1
2 ex
= R (Wi,+,x,Wi+ex,�,x)
G1Di+ 1
2 ey
= R (Wi,+,y,Wi+ey ,�,y)(3.38)
donde R (w�, w+) representa la solución del problema de Riemann con estadosizquierda y derecha dados por w� y w+ respectivamente.
41

3 PPM
Correcciones debidas a las derivadas en la dirección perpendicular. Hasta estemomento el algoritmo es igual al del caso de una dimensión, pero por duplica-do. En este paso es donde se tiene en cuenta la dirección perpendicular paracalcular posteriormente una estimación de los flujos. Para ello se obtienen unosnuevos valores en las fronteras de las celdas dados por
Wn+ 1
2i,±,x = Wi,±,x +
4t24yrUW ·
⇣G1D
i� 12 e
y
�G1Di+ 1
2 ey
⌘
Wn+ 1
2i,±,y = Wi,±,y +
4t24xrUW ·
⇣F 1Di� 1
2 ex
� F 1Di+ 1
2 ex
⌘ (3.39)
Con las aproximaciones en las caras dadas por (3.39), se calculan los flujos quese usan para actualizar la solución al instante tn+1. El cálculo de los flujos esexactamente igual que en (3.38) pero con los nuevos valores en las fronterasde celda, por lo que
Fi+ 12 e
x
= R⇣W
n+ 12
i,+,x,Wn+ 1
2i+ex,�,x
⌘
Gi+ 12 e
y
= R⇣W
n+ 12
i,+,y ,Wn+ 1
2i+ey ,�,y
⌘ (3.40)
y la actualización de las variables conservadas queda
Un+1i = Un
i +4t
4x
⇣Fi� 1
2 ex
� Fi+ 12 e
x
⌘+
4t
4y
⇣Gi� 1
2 ey
�Gi+ 12 e
y
⌘+
4t
2
�Sni + Sn
i+1
�
(3.41)
42
4 ALGORITMOS VOLUME OFFLUID (VOF). ALGORITMOELVIRA
En este capítulo se hace una breve introducción a los algoritmos Volume Of Fluid(VOF) para seguir la interfase entre distintos materiales, que han sido utilizados ydesarrollados desde los años 70 (23). En particular se describe un reciente algorit-mo desarrollado por Pilliod y Pucket, ELVIRA (42), y que ha sido utilizado en eldesarrollo de esta tesis para seguir la interfase de los diferentes materiales. ELVIRAreconstruye una interfase recta localmente en cada celda a partir de las fracciones vo-lumétricas de la propia celda y de las adyacentes. Asimismo, se presenta el algoritmounsplit de advección utilizado.
Por simplicidad, se desarrolla aquí el algoritmo en coordenadas cartesianas, dadoque la idea principal queda de esta forma más clara. El algoritmo en coordenadascilíndricas, aunque más complicado por la geometría, sigue la misma idea.
4.1. Algoritmos Volume Of Fluid (VOF)
En un método de volumen fluido, el movimiento de la interfase no se sigue, sinoque es el volumen de cada fase material el que se evoluciona en el tiempo y lainterfase se reconstruye usando los valores de los volúmenes evolucionados.
La idea básica de estos métodos es la siguiente. Supuestos dos materiales, unooscuro y otro claro, en un dominio bidimensional de ancho de malla, que por sim-plicidad se considera uniforme, h = 4x = 4y, se le asocia a cada celda i, j unnúmero fi,j que representa el volumen de material oscuro en la celda. A fi,j se le
43

4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
llama fracción volumétrica. La fracción volumétrica tiene la propiedad
0 fi,j 1 (4.1)
La fracción volumétrica asociada al fluido claro es 1� fi,j y la interfase pasa por lacelda i, j si y sólo si 0 < fi,j < 1.
La variable discreta fi,j es una discretización de la función característica asociadaal fluido oscuro definida como
f (x, y) =
8<
:1 si hay fluido oscuro en el punto (x, y)
0 si hay fluido claro en el punto (x, y)(4.2)
Como en cada celda el volumen de fluido oscuro es fi,jh2, la relación entre la variablediscreta y la función característica es
fi,jh2=
ˆcelda i,j
f (x, y) dxdy (4.3)
Por otro lado, se tiene que para un flujo incompresible f es un escalar pasivo, porlo que
@f
@t+ u
@f
@x+ v
@f
@y= 0 (4.4)
donde ~u = (u, v) es la velocidad del fluido. Si el fluido es incompresible, la divergenciade la velocidad es nula y se puede escribir la ley de conservación de la funcióncaracterística f (x, y) como
@f
@t+
@ (fu)
@x+
@ (fv)
@y= 0 (4.5)
Si por el contrario, el fluido es compresible y la divergencia de la velocidad no seanula, la ley de conservación tiene un término fuente, como se verá en el capítulo(5).
En ambos casos hay que resolver una ecuación de conservación hiperbólica. Porlo tanto, para resolverla habrá que calcular los flujos en las fronteras de la celda.El objetivo de los métodos de volumen fluido es calcular estos flujos a partir de lasfracciones volumétricas en las celdas adyacentes mediante una reconstrucción localde la interfase. Cuando esta reconstrucción de la interfase da como resultado una
44
4.2 ALGORITMO ELVIRA
aproximación lineal, se habla de métodos VOF con reconstrucción de interfase lineal.De forma general, un algoritmo de tipo VOF con resconstrucción de interfase linealsigue los siguientes pasos en cada celda i, j:
Se calculan posibles pendientes a partir de las fracciones volumétricas adya-centes a la celda i, j.
Para cada una de las pendientes anteriores, se calcula la constante de la rectaque hace que la fracción volumétria para esa pendiente coincida con la real.
Se elige la recta que mejor aproxima la interfase.
Una vez aproximada la interfase, se calculan los flujos de fluido oscuro y fluidoclaro en las caras de la celda.
4.2. ALGORITMO ELVIRA
El algoritmo ELVIRA fue presentado por Pilliod (42). ELVIRA es un algoritmo dereconstrucción de interfase lineal, de forma que encuentra una aproximación lineala la interfase en una celda en la que hay más de un material (de aquí en adelantecelda multimaterial) a partir de información local. En concreto, ELVIRA utiliza lainformación disponible del bloque 3 ⇥ 3 centrado en la celda en la que se quiereaproximar la interfase (celda i, j). Si se denotan por el subíndice k las columnasy por l las filas, las fracciones volumétricas utilizadas en el cálculo de las posiblespendientes son fk,l (k = i� 1, i, i+ 1; l = j � 1, j, j + 1). Con esta informaciónse calculan 6 pendientes candidatas y 6 posibles aproximaciones, añadiendo a laspendientes calculadas la condición de que el volumen de fluido oscuro en la celdai, j sea igual al real. Entre estas 6 aproximaciones lineales se elige la que mejoraproxima en el bloque 3⇥ 3 la interfase real.
4.2.1. Cálculo de las pendientes
Suponiendo que la interfase no es vertical, el volumen de fluido oscuro que hay enla columna i se puede calcular como
Ci =
ˆ x+ 12
xi� 1
2
ˆinterfase
yj� 3
2
dxdy (4.6)
45

4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
Por otra parte, si la interfase es una línea recta, el volumen de fluido oscuro sepuede escribir como
Ci = 4x · yi, ent (4.7)
donde yi ent es la coordenada y de la interfase en xi si la interfase fuese recta.
Igualando las ecuaciones (4.6) y (4.7) se obtiene el valor de yi ent,
yi ent =
´ x+ 12
xi� 1
2
´interfase
yj� 3
2
dxdy
4x=
j+1Pl=j�1
fi,l4x4y
4x=
j+1X
l=j�1
fi,l4y (4.8)
De forma análoga se pueden obtener los valores de yi�1, ent e yi+1, ent. Con estostres valores se pueden obtener tres candidatas a pendientes, que son las diferenciasforward, backward y centered de las coordenadas yi�1, ent, yi, ent, yi+1, ent
mxb =
✓1P
l=�1fi,j+l � fi�1,j+l
◆4y4x
mxf =
✓1P
l=�1fi+1,j+l � fi,j+l
◆4y4x
mxc =
12
✓1P
l=�1fi+1,j+l � fi�1,j+l
◆4y4x
(4.9)
Si se hace lo mismo en dirección y se obtienen las otras tres pendientes candidataspara la interfase en la celda i, j
myb =
✓1P
k=�1fi+k,j � fi+k,j�1
◆4x4y
myf =
✓1P
k=�1fi+k,j+1 � fi+k,j
◆4x4y
myc =
12
✓1P
k=�1fi+k,j+1 � fi+k,j�1
◆4x4y
(4.10)
Obsérvese que la suposición inicial de que la pendiente no sea vertical no añadeninguna restricción, pues se trata de una pendiente horizontal en caso de girar elsistema 90
�, por lo que se tiene en cuenta al añadir las pendientes en dirección y.
Las ecuaciones (4.9) y (4.10) definen el cálculo de las seis pendientes candidatasdel algoritmo ELVIRA para reconstruir la interfase en la celda i, j. Cabe mencionar
46

4.2 ALGORITMO ELVIRA
X1EB
F
CG
A
D
H
X2
Figura 4.1: Recta cortando un rectángulo.
que en estas ecuaciones se han mantenido los factores 4y4x
y 4x4y
pese a indicar másarriba que se supondría h = 4x = 4y. Se ha hecho así para resaltar la diferenciacon el caso de coordenadas cilíndricas.
4.2.2. Cálculo de las constantes de las rectas
La determinación de la constante de la recta es la parte más costosa del algoritmo,pues implica invertir la relación volumen-constante de la recta para una pendientedada. El volumen puede variar linealmente, cuadráticamente o cúbicamente con laconstante. Esta constante se determina aplicando la restricción de que el volumende fluido oscuro en la celda i, j sea el real. Así pues, invertir la relación volumen-constante equivale a encontrar los ceros de la función
F (↵) = V oscuro
i,j (↵)� V oscuro
i,j (4.11)
donde ↵ es la constante de la recta. Los ceros de esta función se pueden hallarde forma iterativa o de forma analítica analizando caso por caso. En coordenadascartesianas se pueden hacer simplificaciones que optimizan el cálculo de la constantede la recta. En (51) se puede encontrar una explicación detallada del algoritmo parael cálculo de la constante de la recta en coordenadas cartesianas, tanto en 2D comoen 3D. A continuación se da una breve descripción del algoritmo en 2D.
El problema se plantea dada una celda rectangular de lados 4x1, 4x2 y una rectade ecuación
m1x+m2y = ↵ (4.12)
47

4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
Si m1 y m2 no son negativas el volumen de corte viene dado por
V =
1
m1m2
"↵2�
2X
i=1
F2 (↵�mi4xi)
#(4.13)
donde
Fn (y) =
8<
:yn para y > 0
0 para y 0
(4.14)
Considerando el ejemplo de la figura (4.1), el primer término, ↵2
m1m2, es el volumen
del triángulo AEH, mientras que la función F2 (y) considera los triángulos BFE
y DGH únicamente cuando los vértices E y H se encuentran fuera de la celda. Elcálculo del volumen de la constante se puede restringir a mi no negativas y 4xi = 1,ya que cualquier caso en dos dimensiones y coordenadas cartesianas se puede reducira éste escalando y girando la celda convenientemente. Por lo que en esta sección seconsiderará únicamente este caso.
El cálculo se realiza de la siguiente manera. En primer lugar se normaliza laecuación de la recta dividiéndola por m1 + m2, por lo que ↵max = 1. La ecuación(4.13) tiene entonces las siguientes propiedades:
V es una función de ↵ continua y monótona creciente con derivada primeracontinua.
V y ↵ varían en el intervalo [0, 1].
Es invariante con respecto a una permutación de los índices, por lo que sólohay que considerar el caso m1 m2.
La función V (↵) es impar respecto al punto (V,↵) =
�12 ,
12
�, por lo que se
restringe el análisis al intervalo 0 ↵ 12 .
V varía cuadráticamente en la región 0 ↵ m1 y linealmente en m1 ↵ 12 .
En el intervalo 0 ↵ 12 existe una cota mínima para el volumen que se
alcanza cuando m1 = m2 =12 .
En el intervalo 0 ↵ 12 existe una cota máxima para el volumen que se
alcanza cuando m1 = 0.
48

4.2 ALGORITMO ELVIRA
Para evitar el problema de que la ecuación (4.13) no está definida cuando mi = 0,se expande dicha fórmula en cada región de tal manera que se eviten las disconti-nuidades. Así, las ecuaciones quedan
V =
↵2
2m(1�m) 0 ↵ < m
V =
↵1�m� V1 m ↵ 1
2
(4.15)
y las relaciones inversas, para el cálcuo de la constante
↵ =
p2m (1�m)V 0 V < V1
↵ = V (1�m) +
m2 V1 V 1
2
(4.16)
donde m = m1 y 1�m = m2 y V1 =m
2(1�m) .
Obsérvese que la recta obtenida como se ha explicado se calcula en general con lacelda girada y escalada. En adelante se considera que se deshacen los cambios, deforma que las rectas candidatas están en el sistema de referencia usual.
4.2.3. Elección de la recta
Una vez calculado el término independiente para cada una de las seis pendientescandidatas, queda determinar cuál es la mejor recta para aproximar la interfase enla celda i, j. Esta elección se realiza tomando la recta que minimiza el error de lafracción volumétrica en el bloque 3 ⇥ 3 centrado en i, j. Es decir, se toma aquellapendiente (hablar de recta o pendiente en este caso es equivalente, pues la pendientedetermina el término independiente y, por tanto, la recta) que minimiza
E2i,j (m) =
1X
k,l=�1
⇣˜fi+k,j+l (m)� fi+k,j+l
⌘2! 1
2
(4.17)
Por lo que la pendiente elegida m es
m = mın
�E2
i,j (mxb ) , E
2i,j (m
xc ) , E
2i,j
�mx
f
�, E2
i,j (myb) , E
2i,j (m
yc) , E
2i,j
�my
f
��(4.18)
Dado que el objetivo es minimizar una medida del error entre las fracciónes volu-
métricas, se puede tomar otra norma para minimizar, por ejemplo E1i,j (m) =
1Pk,l=�1
49

4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
��� ˜fi+k,j+l (m)� fi+k,j+l
���o E1i,j (m) = max
k,l=�1,1
��� ˜fi+k,j+l (m)� fi+k,j+l
���.
4.2.4. Interfase lineal
Como se ha dicho anteriormente, si la interfase real es una línea recta, entoncesELVIRA reproduce la interfase real. Para ver esto basta con analizar dos casos conpendiente negativa:
La interfase entra por la cara izquierda y sale por la derecha.
La interfase entra por la cara izquierda y sale por la cara de abajo.
El resto de casos se pueden reducir a uno de estos dos sin más que girar la celdaun múltiplo de 90
� y elegir convenientemente el fluido oscuro, lo cual no afecta alalgoritmo, pues es invariante con respecto a estos giros y simétrico con respecto afi,j =
12 .
En el primer caso, si la interfase entra y sale por caras opuestas, entonces lastres pendientes en la dirección x (teniendo en cuenta que se ha girado el sistema dereferencia original) dan la misma solución, que coincide con la real. Sean C�1, C0 yC1 las suma de fracciones volumétricas de fluido oscuro en las columnas izquierda,central y derecha respectivamente. Asumiendo, sin pérdida de generalidad, h =
4x = 4y = 1, es decir que la fracción volumétrica coincide con el volumen, y si lainterfase lineal es de la forma y = mx+ b (en el sistema de referencia con origen enla esquina inferior izquierda del bloque 3⇥ 3), entonces
C�1 =
m2 + b
C0 =
32m+ b
C1 =
52m+ b
(4.19)
las tres pendientes en dirección x son entonces mxb = mx
f = mxc = m. Por lo
que ELVIRA dará como resultado la recta real, dado que E2i,j (m
xb ) = E2
i,j
�mx
f
�=
E2i,j (m
xc ) = 0
En caso de que la interfase pase por la cara izquierda y por la de abajo, entonces lapendiente backward en dirección x da el resultado real. Con la nomenclatura anteriory asumiendo m 1
C�1 =
m2 + b
C0 =
32m+ b
(4.20)
50

4.3 Algoritmo Unsplit de evolución temporal
Lo que da mxb = m. En caso de que m > 1 basta reproducir este argumento girando
90
� el bloque 3⇥ 3 y eligiendo convenientemente el fluido oscuro.
4.3. Algoritmo Unsplit de evolución temporal
Una vez explicado el algoritmo ELVIRA, se explica aquí el solver unsplit utilizadopara la advección de la fracción volumétrica, el Corner Transport Upwind (CTU) deprimer orden (9). En esta sección se presenta el algoritmo para flujo incompresible,pues representa la idea principal, y se dejan las particularidades del caso de flujocompresible para el capítulo (5). Además, para simplificar y fijar ideas, se supondráu > 0 y v > 0.
La idea es aproximar la ecuación de advección de la fracción volumétrica (4.5)usando un método conservativo de la forma
fn+1i,j = fn
i,j +
hF ni� 1
2 ,j� F n
i+ 12 ,j
i+
hGn
i,j� 12�Gn
i,j+ 12
i(4.21)
Se tiene que el flujo a través de la cara derecha de la celda i, j es
F ni+ 1
2 ,j=
´ tn+1
tn
´ yi,j+1
2yi,j� 1
2
u⇣xi+ 1
2, y, t
⌘f⇣xi+ 1
2, y, t
⌘dydt (4.22)
donde se asume que la velocidad ui+ 12 ,j
es constante en⇣yj� 1
2, yj+ 1
2
⌘⇥ (tn, tn+1
). Laintegral en (4.22) representa el volumen de fluido oscuro en el rectángulo espacio-tiempo BCEF . Este volumen se puede hallar yendo atrás por las característicasdesde BCEF . Así se obtiene la región ABCDEFGH, definida por
A =
⇣xi+ 1
2� ui+ 1
2 ,j4t, yj� 1
2, tn⌘
B =
⇣xi+ 1
2, yj� 1
2, tn⌘
D =
⇣xi+ 1
2� ui+ 1
2 ,j4t, yj+ 1
2, tn⌘
C =
⇣xi+ 1
2, yj� 1
2, tn+1
⌘
E =
⇣xi+ 1
2, yj+ 1
2, tn⌘
F =
⇣xi+ 1
2, yj+ 1
2, tn+1
⌘
G =
⇣xi+ 1
2� ui+ 1
2 ,j4t, yj� 1
2� vi,j+ 1
24t, tn
⌘
H =
⇣xi+ 1
2� ui+ 1
2 ,j�14t, yj� 12� vi,j� 1
24t, tn
⌘
(4.23)
51

4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
Figura 4.2: Dominio de dependencia de las características
El dominio de dependencia de estas características en el tiempo tn es la regiónAHBEG. Por tanto, el flujo en la cara se puede aproximar por
F ni+ 1
2 ,j⇡ˆABDE
fdxdy +
ˆABH
fdxdy �ˆDEG
fdxdy (4.24)
Para evaluar las integrales en (4.24) se utilizan las rectas calculadas con ELVIRAcalculando el área que intersecta con las regiones de interés, ABDE, ABH y DEG.
Por último, hay que tener en cuenta un caso particular que se ha obviado porque sehan considerado siempre velocidades positivas. Siguiendo con el ejemplo del flujo enla cara i+ 1
2 , j, si ui+ 12 ,j�1 < 0 entonces el punto H caería en la celda (i+ 1, j � 1).
Para evitar este tipo de distorsiones y asegurar que el punto H cae en la celda(i, j � 1), la coordenada x del punto H se calcula como
xH = mın
⇣xi+ 1
2, xi+ 1
2� ui+ 1
2 ,j�14t⌘
(4.25)
El cálculo del resto de flujos se hace de forma análoga.
52
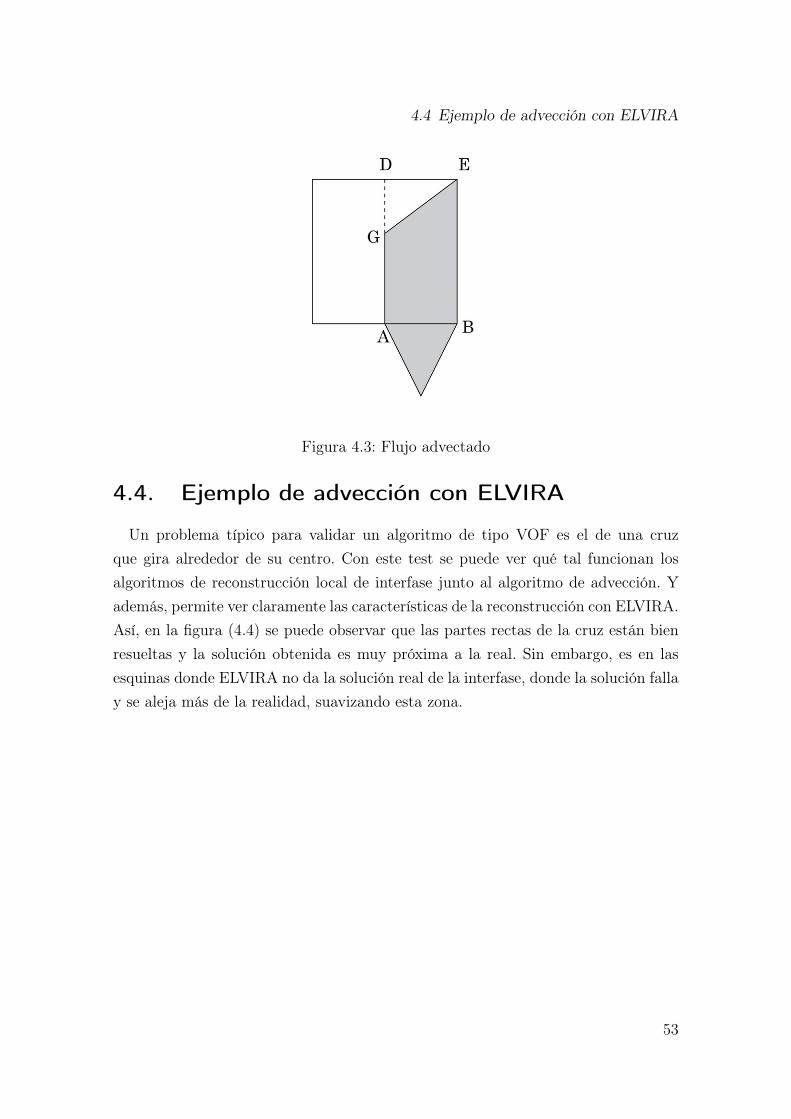
4.4 Ejemplo de advección con ELVIRA
Figura 4.3: Flujo advectado
4.4. Ejemplo de advección con ELVIRA
Un problema típico para validar un algoritmo de tipo VOF es el de una cruzque gira alrededor de su centro. Con este test se puede ver qué tal funcionan losalgoritmos de reconstrucción local de interfase junto al algoritmo de advección. Yademás, permite ver claramente las características de la reconstrucción con ELVIRA.Así, en la figura (4.4) se puede observar que las partes rectas de la cruz están bienresueltas y la solución obtenida es muy próxima a la real. Sin embargo, es en lasesquinas donde ELVIRA no da la solución real de la interfase, donde la solución fallay se aleja más de la realidad, suavizando esta zona.
53
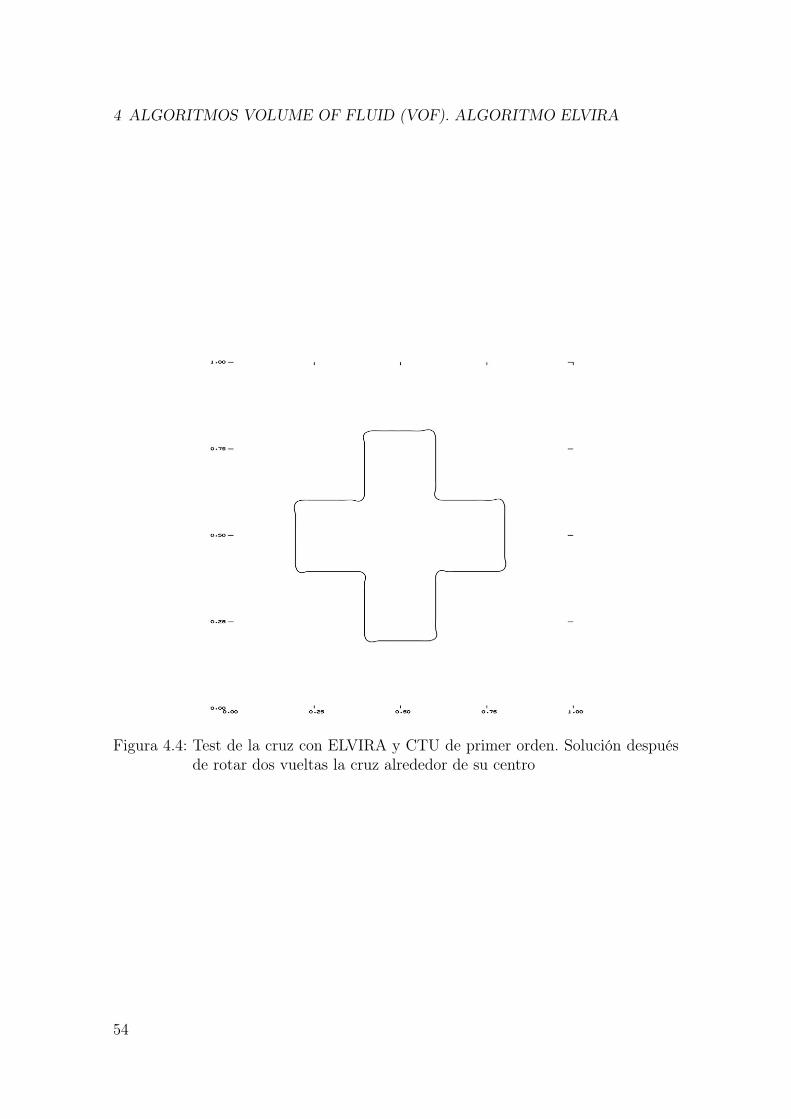
4 ALGORITMOS VOLUME OF FLUID (VOF). ALGORITMO ELVIRA
Figura 4.4: Test de la cruz con ELVIRA y CTU de primer orden. Solución despuésde rotar dos vueltas la cruz alrededor de su centro
54
5 MÉTODO DE GODUNOV DEALTO ORDEN UNSPLITPARA MULTIMATERIAL
Se presenta en este capítulo el esquema de un método de Godunov de alto ordenunsplit para la resolución de las ecuaciones de Euler con varios materiales. El métodonumérico que se describe a continuación está basado en los trabajos de Colella, Glazy Ferguson (12) y de Miller y Puckett (36). La aproximación que se utiliza consiste enconsiderar un material único con propiedades adecuadas junto al uso de un algoritmode tipo VOF para reconstruir la interfase localmente en las celdas con más de unmaterial.
Como en el resto de este trabajo, se presenta en este capítulo el método parageometría cartesiana. El caso de geometría cilíndrica se hace siguiendo las ideasaquí expuestas con las particularidades de la geometría cilíndrica.
5.1. Ecuaciones de Euler para multimaterial
Las ecuaciones de Euler para un fluido en coordenadas cartesianas en 2D son
@⇢@t
+
@(⇢u)@x
+
@(⇢v)@y
= 0
@(⇢u)@t
+
@(
⇢u2+p)
@x+
@(⇢uv)@y
= 0
@(⇢v)@t
+
@(⇢uv)@x
+
@(
⇢v2+p)
@y= 0
@(⇢E)@t
+
@(u(⇢E+p))@x
+
@(v(⇢E+p))@y
= 0
(5.1)
donde ⇢ es la densidad del fluido, ~u = (u, v) el vector velocidad, p la presión y ⇢E laenergía total del fluido. El sistema queda determinado añadiendo una ecuación deestado, p = p (⇢, e).
55

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Para obtener las ecuaciones para multimaterial para este modelo se asume:
Existe una única velocidad.
Se deben seguir cumpliendo las leyes de conservación de la masa total, de lacantidad de movimiento en cada dirección y de la energía total del sistema. Esdecir, se debe cumplir (5.1).
Se debe cumplir la conservación de masa de cada material, por lo que
@f↵⇢↵
@t+
@ (f↵⇢↵u)
@x+
@ (f↵⇢↵v)
@y= 0 8↵ (5.2)
donde el superíndice ↵ hace referencia a un material concreto y f↵ es la frac-ción volumétrica del material ↵. Obsérvese que de esta forma se cumple laconservación de la masa total.
En todo instante y lugar existe equilibrio mecánico, es decir
p↵ (x, y, t) = p (x, y, t) 8↵ (5.3)
donde p↵ designa la presión del material ↵.
Con todas estas hipótesis, se pueden deducir las ecuaciones que describen la evolu-ción de las fracciones volumétricas, f↵, y de las energías de cada material, f↵⇢↵E↵.Se verá en primer lugar el caso de las fracciones volumétricas.
Desarrollando la ecuación de conservación del material ↵
f↵@⇢↵
@t+ ⇢↵
@f↵
@t+ f↵u
@⇢↵
@x+ ⇢↵
@ (f↵u)
@x+ f↵v
@⇢↵
@y+ ⇢↵
@ (f↵v)
@y= 0
y reorganizando términos y dividiendo por ⇢↵
@f↵
@t+
@ (f↵u)
@x+
@ (f↵v)
@y= �f↵
⇢↵@⇢↵
@t� f↵u
⇢↵@⇢↵
@x� f↵v
⇢↵@⇢↵
@y(5.4)
Se asume ahora que cualquier compresión durante el proceso es isentrópica y quela entropía de cada material permanece constante, por lo que
¯K
⇢@⇢ = @p = @p↵ =
K↵
⇢↵@⇢↵ (5.5)
56

5.1 Ecuaciones de Euler para multimaterial
Sustituyendo (5.5) en (5.1) se obtiene
@f↵
@t+
@ (f↵u)
@x+
@ (f↵v)
@y= �f↵
¯K
⇢K↵
@⇢
@t� f↵
¯K
⇢K↵
✓u@⇢
@x+ v
@⇢
@y
◆(5.6)
que teniendo en cuenta la conservación de la masa total, se puede escribir como
@f↵
@t+
@ (f↵u)
@x+
@ (f↵v)
@y= f↵
¯K
K
✓@u
@x+
@v
@y
◆(5.7)
que es la ecuación de evolución de las fracciones volumétricas que se utilizará paraavanzar en el timpo.
A diferencia de la ecuación para flujo incompresible vista en el capítulo (4), laecuación (5.7) tiene un término fuente proporcional a la divergencia de la velocidad.Posteriormente se analizará cómo tratar este término en la resolución numérica.Además, obsérvese que la ecuación (5.7) cumple que
P↵
@f↵
@t= 0, como debe ser.
Para el caso de la energía de cada material, f↵⇢↵E↵, hay que tener en cuenta quela suma de las energías de cada material es la energía total
X
↵
f↵⇢↵E↵= ⇢E (5.8)
Y sustituyendo (5.8) en la ecuación de conservación de energía total y desarro-llando las derivadas, se obtienen las ecuaciones de evolución de las energías de cadamaterial
@f↵⇢↵E↵
@t+
@(u·f↵⇢↵E↵)@x
+
@(v·f↵⇢↵E↵)@y
= �f↵⇢↵
⇢
⇣u @p@x
+ v @p@y
⌘
�pf↵ KK↵
⇣@u@x
+
@v@y
⌘ (5.9)
Como se ve, la ecuación de evolución de la energía de cada material introduce untérmino fuente compuesto por una parte por la variación de presiones y por otrapor la de velocidades. El término proporcional a la divergencia de la velocidad esprácticamente igual al término fuente de la ecuación de evolución de la fracciónvolumétrica, por lo que habrá que tener cuidado para hacer aproximaciones cohe-rentes. Como se verá más adelante, estos términos fuentes se tratarán de forma queel método conserve la energía total del sistema.
Por tanto, de (5.1), (5.2), (5.7) y (5.9) se pueden obtener las ecuaciones para flujo
57

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
multimaterial
@(⇢u)@t
+
@(
⇢u2+p)
@x+
@(⇢uv)@y
= 0
@(⇢v)@t
+
@(⇢uv)@x
+
@(
⇢v2+p)
@y= 0
@f↵
@t+
@(f↵u)@x
+
@(f↵v)@y
= f↵ KK
⇣@u@x
+
@v@y
⌘8↵
@f↵⇢↵
@t+
@(f↵⇢↵u)@x
+
@(f↵⇢↵v)@y
= 0 8↵@f↵⇢↵E↵
@t+
@(u·f↵⇢↵E↵)@x
+
@(v·f↵⇢↵E↵)@y
= �f↵⇢↵
⇢
⇣u @p@x
+ v @p@y
⌘
�pf↵ KK↵
⇣@u@x
+
@v@y
⌘8↵
(5.10)
donde hay que añadir las ecuaciones de estado para cada multimaterial p↵ = p↵ (⇢↵, e↵).Éste es el sistema de ecuaciones a resolver por el método que se presenta a conti-
nuación.
5.2. Método de Godunov para multimaterial
El método desarrollado está basado en el trabajo de (12) y (36), en el que serealizan modificaciones en el método de Godunov de alto orden típico para un únicomaterial, como el PPM presentado en el capítulo (3). La idea básica es representar elestado en cada celda multimaterial (aquélla con más de un material) como un únicomaterial ficticio con energía interna, densidad y propiedades termodinámicas elegidasadecuadamente. A partir del sistema con un único material ficticio resultante seobtienen con PPM las soluciones de los problemas de Riemann (⇢⇤, u⇤, v⇤, p⇤, E⇤
)i+ 12 ,j
y (⇢⇤, u⇤, v⇤, p⇤, E⇤)i,j+ 1
2en cada cara del dominio. Aquellas celdas en las que sólo hay
un material y que no tienen vecinas con más de un material, se avanzan en el tiempocon las soluciones del problema de Riemann y el algoritmo unsplit explicado en (3).Las celdas con más de un material o vecinas de celdas con más de un material seavanzan en el tiempo utilizando los flujos que se calculan a partir del algoritmo VOFexplicado en el capítulo (4). A continuación se detalla el proceso.
5.2.1. Material único
En primer lugar se debe calcular el material único a partir de las propiedadesconocidas de todos los materiales. En cada celda se tiene el estado termodinámico
58

5.2 Método de Godunov para multimaterial
de cada material, por lo que se puede definir un material equivalente de la siguientemanera.
La densidad equivalente se define como la densidad total
⇢ =
X
↵
f↵⇢↵ (5.11)
De forma similar, la energía del material equivalente se define como la energía total
⇢ ¯E =
X
↵
f↵⇢↵E↵ (5.12)
Quitando la energía cinética se obtiene la energía interna del material equivalente
⇢e = ⇢ ¯E � 1
2
⇢�u2
+ v2�=
X
↵
f↵⇢↵E↵ � 1
2
X
↵
f↵⇢↵�u2
+ v2�=
X
↵
m↵E↵ (5.13)
donde m↵=
f↵⇢↵
⇢es la fracción másica del material ↵.
Por último queda definir las propiedades termodinámicas que se utilizan en laobtención de las soluciones de los problemas de Riemann y en la actualización dela fracción volumétrica. Para calcular el módulo de compresibilidad equivalente,se tiene la siguiente relación entre los volúmenes específicos de cada material y elvolumen específico equivalente
v =
X
↵
m↵
⇢↵(5.14)
y derivando con respecto a la presión a entropía constante
@v
@p
����s
= �X
↵
m↵
⇢↵@ ln ⇢↵
@p= �
X
↵
f↵@ ln ⇢↵
@p(5.15)
Por lo que
¯K =
X
↵
f↵
K↵
!�1
(5.16)
Por otra parte, para obtener las soluciones de los problemas de Riemann con elalgoritmo unsplit se necesitan �, @e
@p
���⇢
y @⇢@p
���e. Para ello se asume que en compre-
siones sin cambio de densidad los materiales aguantan esfuerzos isotrópicos, no hayintercambio de energía entre los materiales y las densidades de cada material no
59

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
varían. Bajo estas condiciones
@e
@p
����⇢
=
X
↵
f↵⇢↵
⇢
@e↵
@p
����⇢↵
(5.17)
de donde se puede hallar el parámetro de Grüneisen, dado que (⇢�)�1=
@e@p
���⇢=
P↵
f↵⇢↵
⇢@e↵
@p
���⇢↵
y despejando
� =
X
↵
f↵
�↵
!�1
(5.18)
Por último, las derivadas de la presión se obtiene a partir de (5.16) y (5.17) yteniendo en cuenta que
@p
@⇢
����e
= ⇢@p
@⇢
����s
� p
⇢
@p
@e
����⇢
= K � p
⇢
@p
@e
����⇢
Por lo que@p
@e
����⇢
= ⇢� (5.19)
@p
@⇢
����e
=
¯K � p� (5.20)
5.2.2. Avance en el tiempo
Como se ha dicho antes, una vez definido el material equivalente se utiliza elmétodo de Godunov de alto orden explicado en el capítulo (3) para determinar lassoluciones de los problemas de Riemann en las caras del dominio y obtener así losflujos de material equivalente. En este punto se distinguen dos tipos de celdas: celdasmultimaterial y el resto. Según el tipo de celdas, los flujos se definen de una formau otra.
5.2.2.1. Celdas multimaterial
En cada instante de tiempo tn, se dice que una celda es multimaterial si cumpleuna de las siguientes condiciones:
60

5.2 Método de Godunov para multimaterial
1. Contiene más de un material, o lo que es lo mismo, 0 < f↵ < 1 para algún ↵
(Si es cierto para uno, es cierto al menos para dos materiales).
2. Tiene sólo un material y es susceptible de convertirse en una celda del tipo 1
en tn+1. Es decir, alguna de las ocho celdas vecinas es del tipo 1.
El resto de celdas son celdas que en tn y tn+1 con seguridad tienen sólo uno y elmismo material. Por lo que la fracción volumétrica sólo hay que actualizarla en lasceldas multimaterial.
Para avanzar en el tiempo la fracción volumétrica hay que resolver numéricamentela ecuación (5.7). Para ello, se realiza en dos pasos. En primer lugar se actualiza sintener en cuenta el término fuente, como si fuera incompresible. Y a continuación seintroduce el término debido a la compresibilidad del material.
La resolución de la ecuación sin término fuente se hace con el algoritmo unsplit deadvección explicado en el capítulo (4). Es decir, se calculan los volúmenes advectadoscon la ayuda de la reconstrucción local de la interfase con ELVIRA con
V ↵i+ 1
2 ,j⇡ˆABDE
f↵dxdy +
ˆABH
f↵dxdy �ˆDEG
f↵dxdy (5.21)
donde los puntos A, B, D, E, G, H se obtienen a partir de las soluciones del problemade Riemann en las caras
A =
⇣xi+ 1
2� u⇤
i+ 12 ,j4t, yj� 1
2, tn⌘
B =
⇣xi+ 1
2, yj� 1
2, tn⌘
D =
⇣xi+ 1
2� u⇤
i+ 12 ,j4t, yj+ 1
2, tn⌘
E =
⇣xi+ 1
2, yj+ 1
2, tn⌘
G =
⇣xi+ 1
2� u⇤
i+ 12 ,j4t, yj� 1
2� v⇤
i,j+ 124t, tn
⌘
H =
⇣mın
⇣xi+ 1
2, xi+ 1
2� u⇤
i+ 12 ,j�14t⌘, yj� 1
2� v⇤
i,j� 124t, tn
⌘
(5.22)
donde ya se ha tenido en cuenta el cálculo de la coordenada x de H, como se explicaen el capítulo(4), para evitar distorsiones.
Con los volúmenes advectados en cada cara de celda se actualiza la fracción vo-lumétrica discretizando la ecuación de advección de fracción volumétrica para flujocompresible
f↵0
i,j = f↵i,j +
V ↵i� 1
2 ,j� V ↵
i+ 12 ,j
+ V ↵i,j� 1
2� V ↵
i,j+ 12
Vi,j
(5.23)
61

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
donde Vi,j es el volumen de la celda i, j.
Una vez hecho el paso incompresible, se introduce la contribución del términofuente. En primer lugar, hay que obtener una aproximación del módulo de compre-sibilidad medio de cada material en la celda en (tn, tn+1), ¯K↵. Al igual que los flujosde volumen advectado, esta aproximación se obtiene con la ayuda de ELVIRA. Deesta forma, se tiene
f↵0i,jVi,j
¯K↵=
f↵i,jVi,j
K↵i,j
+ Fi� 12 ,j
(K↵)� Fi+ 1
2 ,j(K↵
) + Fi,j� 12(K↵
)� Fi,j+ 12(K↵
) (5.24)
donde Fi+ 12 ,j
(K↵) se calcula a partir de los volúmenes advectados en la cara i+ 1
2 , j.Siguiendo con el ejemplo expuesto
Fi+ 12 ,j
(K↵) =
´ABDE
f↵dxdy
K↵i,j
+
´ABH
f↵dxdy
K↵i,j�1
�´DEG
f↵dxdy
K↵i,j
(5.25)
Con la aproximación del módulo de compresibilidad de cada material ¯K↵, seobtiene la fracción volumétrica en el instante tn+1
f↵,n+1i,j = f↵0
i,j +
1�
X
�
f�0
i,j
!f↵0i,j
¯Ki,j
¯K↵i,j
(5.26)
donde el módulo de compresibilidad medio ¯Ki,j se obtiene a partir de (5.24).
Es importante fijarse en que el término
1�
P�
f�0
i,j
!es una aproximación de la
divergencia de la velocidad multiplicada por 4t, con la que se aseguraP↵
f↵,n+1i,j = 1.
El término fuente utilizado se usará posteriormente en la actualización de la energíade cada material.
La actualización del resto de variables del sistema (5.10), ⇢u, ⇢v, f↵⇢↵, f↵⇢↵E↵,en las celdas multimaterial se hace también con la ayuda del algoritmo VOF y a
62

5.2 Método de Godunov para multimaterial
partir de la siguiente discretización en el tiempo y en el espacio
(⇢u)n+1i,j = (⇢u)ni,j +
4tVi,j
⇣Fi� 1
2 ,j(⇢u)� Fi+ 1
2 ,j(⇢u)
⌘
+
4tVi,j
⇣Gi,j� 1
2(⇢u)� Fi,j+ 1
2(⇢u)
⌘
(⇢v)n+1i,j = (⇢v)ni,j +
4tVi,j
⇣Fi� 1
2 ,j(⇢v)� Fi+ 1
2 ,j(⇢v)
⌘
+
4tVi,j
⇣Gi,j� 1
2(⇢v)� Fi,j+ 1
2(⇢v)
⌘
(f↵⇢↵)n+1i,j = (f↵⇢↵)ni,j +
1Vi,j
⇣Fi� 1
2 ,j(f↵⇢↵)� Fi+ 1
2 ,j(f↵⇢↵)
⌘
+
1Vi,j
⇣Gi,j� 1
2(f↵⇢↵)�Gi,j+ 1
2(f↵⇢↵)
⌘
(f↵⇢↵E↵)
n+1i,j = (f↵⇢↵E↵
)
ni,j +
1Vi,j
⇣Fi� 1
2 ,j(f↵⇢↵E↵
)� Fi+ 12 ,j
(f↵⇢↵E↵)
⌘
+
1Vi,j
⇣Gi,j� 1
2(f↵⇢↵E↵
)�Gi,j+ 12(f↵⇢↵E↵
)
⌘
+
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 ui,j
⇣Ai� 1
2 ,jp⇤i� 1
2 ,j� Ai+ 1
2 ,jp⇤i+ 1
2 ,j
⌘
+
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 vi,j
⇣Ai,j� 1
2p⇤i,j� 1
2� Ai,j+ 1
2p⇤i,j+ 1
2
⌘
� pi,j
1�
P�
f�0
i,j
!f↵
0i,j
Ki,j
K↵
i,j
(5.27)donde Fi+ 1
2 ,j(U) y Gi,j+ 1
2(U) son los flujos de la variable U en dirección x e y en
las caras i+ 12 , j y i, j + 1
2 respectivamente. A continuación se detalla el cálculo detodos los flujos, así como de los términos fuentes en la energía de cada material.
En primer lugar se detalla el cálculo de los flujos de masa y energía de cadamaterial. Este cálculo se realiza con la ayuda de los flujos de volumen advectados ylas aproximaciones de densidad y energía total en las caras. Estas aproximacionesno son más que los valores en la celda correspondiente en función del signo de lavelocidad en la cara
⇢↵i+ 1
2 ,j=
8<
:⇢↵i,j si u⇤
i+ 12 ,j
> 0
⇢↵i+1,j si u⇤i+ 1
2 ,j 0
, ⇢↵i,j+ 1
2=
8<
:⇢↵i,j si v⇤
i,j+ 12 0
⇢↵i,j+1 si v⇤i,j+ 1
2 0
(5.28)
E↵i+ 1
2 ,j=
8<
:E↵
i,j si u⇤i+ 1
2 ,j> 0
E↵i+1,j si u⇤
i+ 12 ,j 0
, E↵i,j+ 1
2=
8<
:E↵
i,j si v⇤i,j+ 1
2 0
E↵i,j+1 si v⇤
i,j+ 12 0
(5.29)
63

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Con estos valores y la ayuda de los volúmenes de material ↵ advectados se calculanlos flujos de densidad y energía total de cada material de la siguiente manera
Fi+ 12 ,j
(f↵⇢↵) = ⇢↵i+ 1
2 ,j
´ABDE
f↵dxdy
+ ⇢↵i+ 1
2 ,j�1
´ABH
f↵dxdy
� ⇢↵i+ 1
2 ,j
´DEG
f↵dxdy
Fi+ 12 ,j
(f↵⇢↵E↵) = ⇢↵
i+ 12 ,jE↵
i+ 12 ,j
´ABDE
f↵dxdy
+ ⇢↵i+ 1
2 ,j�1E↵
i+ 12 ,j�1
´ABH
f↵dxdy
� ⇢↵i+ 1
2 ,jE↵
i+ 12 ,j
´DEG
f↵dxdy
(5.30)
donde se ha seguido el ejemplo usual en este trabajo. Los flujos en la dirección y secalculan de forma análoga.
Los flujos de cantidad de movimiento en x se calculan con las soluciones de losproblemas de Riemann y los flujos de masa de cada material
Fi+ 12 ,j
(⇢u) = Ai+ 12 ,j
⇣⇢i+ 1
2 ,ju⇤2i+ 1
2 ,j+ p⇤
i+ 12 ,j
⌘
Gi+ 12 ,j
(⇢u) = Ai+ 12 ,j
⇣⇢i+ 1
2 ,ju⇤i+ 1
2 ,jv⇤i+ 1
2 ,j
⌘ (5.31)
donde Fi+ 12 ,j
(⇢u) y Gi+ 12 ,j
(⇢u) son los flujos de la cantidad de movimiento en x endirección x e y respectivamente, Ai+ 1
2 ,jes el área de la cara
�i+ 1
2 , j�
y ⇢i+ 12 ,j
esuna aproximación de la densidad en la cara
�i+ 1
2 , j�
en (tn, tn+1) obtenida como ladensidad media que atraviesa dicha cara en dicho intervalo de tiempo
⇢i+ 12 ,j
=
P↵
Fi+ 12 ,j
(f↵⇢↵)
P↵
V ↵i+ 1
2 ,j
(5.32)
Los flujos de cantidad de movimiento en dirección y se calculan de forma análoga,obteniéndose
Fi,j+ 12(⇢v) = Ai,j+ 1
2
⇣⇢i,j+ 1
2v⇤i,j+ 1
2u⇤i,j+ 1
2
⌘
Gi,j+ 12(⇢v) = Ai,j+ 1
2
⇣⇢i,j+ 1
2v⇤2i,j+ 1
2+ p⇤
i,j+ 12
⌘ (5.33)
donde ⇢i,j+ 12=
P↵
Gi,j+1
2(f↵⇢↵)
P↵
V ↵
i,j+12
.
Por último, queda calcular los términos fuentes de las ecuaciones de conservaciónde la energía total de cada material. Estos términos están formado por dos sumandos:
64

5.2 Método de Godunov para multimaterial
el primero relacionado con el gradiente de presiones y el segundo con la divergenciade la velocidad. El primero de ellos se aproxima como
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 ui,j
⇣Ai� 1
2 ,jp⇤i� 1
2 ,j� Ai+ 1
2 ,jp⇤i+ 1
2 ,j
⌘
+
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 vi,j
⇣Ai,j� 1
2p⇤i,j� 1
2� Ai,j+ 1
2p⇤i,j+ 1
2
⌘ (5.34)
donde las aproximaciones de la velocidad en la celda, ui,j y vi,j se definen como
ui,j =
12
⇣u⇤i� 1
2 ,j+ u⇤
i+ 12 ,j
⌘
vi,j =
12
⇣v⇤i,j� 1
2+ v⇤
i,j+ 12
⌘ (5.35)
Obsérvese además que la aproximación de las densidades tomadas en tn+1 no hacenel método implícito, pues no se requiere el cálculo de la energía para actualizar losvalores de densidad.
El segundo término, el debido a la divergencia de la velocidad, se estima utilizan-do la aproximación del término fuente de la ecuación de la fracción volumétrica yhallando una presión media en la celda pi,j de forma que el método sea conservativo.Por lo que se toma pi,j tal que
4tVi,j
⇣Ai� 1
2 ,ju⇤i� 1
2 ,jp⇤i� 1
2 ,j� Ai+ 1
2 ,ju⇤i+ 1
2 ,jp⇤i+ 1
2 ,j
⌘=
=
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 ui,j
⇣Ai� 1
2 ,jp⇤i� 1
2 ,j� Ai+ 1
2 ,jp⇤i+ 1
2 ,j
⌘
+
4tVi,j
(f↵⇢↵)n+1i,j
⇢n+1 vi,j
⇣Ai,j� 1
2p⇤i,j� 1
2� Ai,j+ 1
2p⇤i,j+ 1
2
⌘
+ pi,j
1�
P�
f�0
i,j
!P↵
f↵
0i,j
Ki,j
K↵
i,j
y despejando
pi,j =4t
Vi,j
[Aup]x + [Aup]y + ui,j [Ap]x+ vi,j [Ap]
y
1�
P�
f�0
i,j
!P↵
f↵
0i,j
Ki,j
K↵
i,j
(5.36)
donde [U ]
x= Ui+ 1
2 ,j� Ui� 1
2 ,jy [U ]
y= Ui,j+ 1
2� Ui,j� 1
2.
Con todo lo expuesto, todas las variables de las celdas multimaterial se puedenactualizar al siguiente paso de tiempo.
65

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
5.2.2.2. Relajación de la presión
Una vez actualizadas las variables en las celdas multimaterial, en general no secumple el equilibrio de presiones que se utiliza como hipótesis. Por tanto, se deberealizar este equilibrio a posteriori. A continuación se describe el algoritmo publicadopor Miller y Pucket en (36) para relajar la presión de las celdas multimaterial.
Se busca obtener una presión común para todos los materiales, p, de forma que semantenga
P↵
f↵= 1. Además, dado que la masa de los materiales debe permanecer
constante y asumiendo pequeños cambios de volumen, se puede escribir
p = p↵ +4p↵ = p↵ � K↵
f↵4f↵ (5.37)
que junto a la restricción X
↵
4f↵= 0 (5.38)
conforman el sistema que se quiere resolver.
Por lo que la actualización de la fracción volumétrica es
p =
P↵
f↵p↵
K↵
P↵
f↵
K↵
(5.39)
4f↵=
f↵
K↵(p↵ � p) (5.40)
f↵ f↵+4f↵ (5.41)
Y la energía interna se debe modificar por el cambio de volumen iséntropico
f↵⇢↵E↵= f↵⇢↵E↵ � p4f↵ (5.42)
Este procedimiento debe hacerse iterativamente con pequeños cambios de fracciónvolumétrica para respetar la linealización hecha en (5.37).
Obsérvese que este algoritmo no cambia la conservación de la masa de ningúnmaterial (ni la total), ni de la cantidad de movimiento, ni de la energía. Lo únicoque se hace es “traspasar isentrópicamente” energía de unos materiales a otros, peroconservando la energía total del sistema.
66

5.3 Validación
5.2.2.3. Celdas unimaterial
Las celdas con un solo material son todas aquellas que no son multimaterial. Enestas celdas el material real y el equivalente son siempre el mismo. La actualizaciónde las variables en estas celdas es más sencilla, pues se realiza a partir de los flujosobtenidos con las soluciones de los problemas de Riemann calculadas con el materialequivalente como se explica en el capítulo (3), salvo en un caso. Si la celda tieneuna cara vecina a una celda multimaterial de tipo 2, entonces los flujos en esa carason los calculados para la celda multimaterial vecina, de forma que el método seaconservativo.
5.3. Validación
Con el objetivo de validar el método expuesto en la sección anterior, se han reali-zado numerosos tests en una y dos dimensiones y se han comparando las solucionescon los datos existentes en la literatura. Los tests que se presentan son problemastípicos para validar códigos fluidodinámicos de las ecuaciones de Euler. Un extensoreport sobre este tipo de tests se puede encontrar en (30). Estos tests se han hechotodos con gas ideal para los dos materiales con � = 1, 4.
Los resultados obtenidos han sido muy satisfactorios, observándose una buenaaproximación de la interfase entre materiales, así como de las superficies de contactoentre materiales distintos.
5.3.1. Test Two Shock problem (1D)
Este es un test típico para comprobar códigos para resolver las ecuaciones de Eulerintroducido por Woodward y Colella. Consiste en un problema en una dimensióncon condiciones de frontera de pared en ambos lados, en el que se tienen tres zonasdiferenciadas: dos extremos con alta presión y una zona intermedia con baja presión.La densidad es uniforme en todo el dominio y la velocidad nula en todas partes. Seobtiene así la interacción de dos ondas de choque. Los datos concretos se puedenobservar en la figura (5.1)
Este problema permite ver la resolución tanto del problema general como de lasdiscontinuidades de contacto. En las figuras (5.2) y (5.3) se muestran los resultadosdel test con un sólo material y usando PPM con detector de discontinuidad de
67
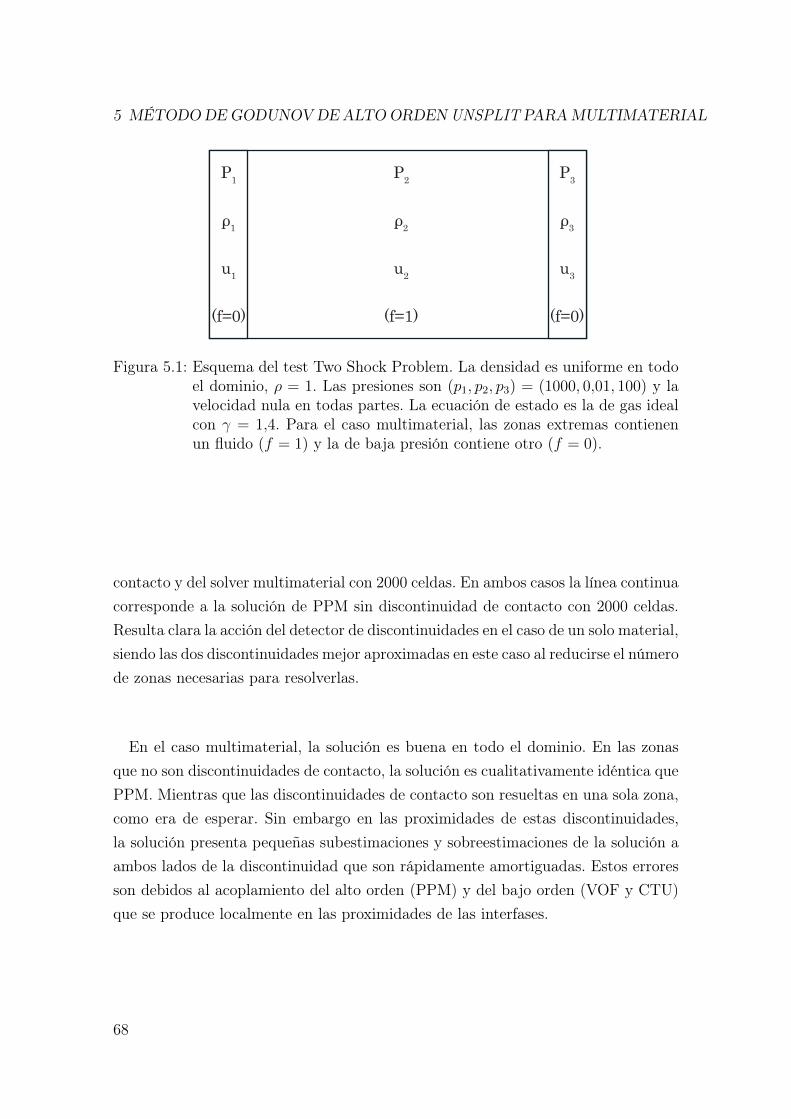
5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
P1
!1
u1
(f=0)
P2
!2
u2
(f=1)
P3
!3
u3
(f=0)
Figura 5.1: Esquema del test Two Shock Problem. La densidad es uniforme en todoel dominio, ⇢ = 1. Las presiones son (p1, p2, p3) = (1000, 0,01, 100) y lavelocidad nula en todas partes. La ecuación de estado es la de gas idealcon � = 1,4. Para el caso multimaterial, las zonas extremas contienenun fluido (f = 1) y la de baja presión contiene otro (f = 0).
contacto y del solver multimaterial con 2000 celdas. En ambos casos la línea continuacorresponde a la solución de PPM sin discontinuidad de contacto con 2000 celdas.Resulta clara la acción del detector de discontinuidades en el caso de un solo material,siendo las dos discontinuidades mejor aproximadas en este caso al reducirse el númerode zonas necesarias para resolverlas.
En el caso multimaterial, la solución es buena en todo el dominio. En las zonasque no son discontinuidades de contacto, la solución es cualitativamente idéntica quePPM. Mientras que las discontinuidades de contacto son resueltas en una sola zona,como era de esperar. Sin embargo en las proximidades de estas discontinuidades,la solución presenta pequeñas subestimaciones y sobreestimaciones de la solución aambos lados de la discontinuidad que son rápidamente amortiguadas. Estos erroresson debidos al acoplamiento del alto orden (PPM) y del bajo orden (VOF y CTU)que se produce localmente en las proximidades de las interfases.
68
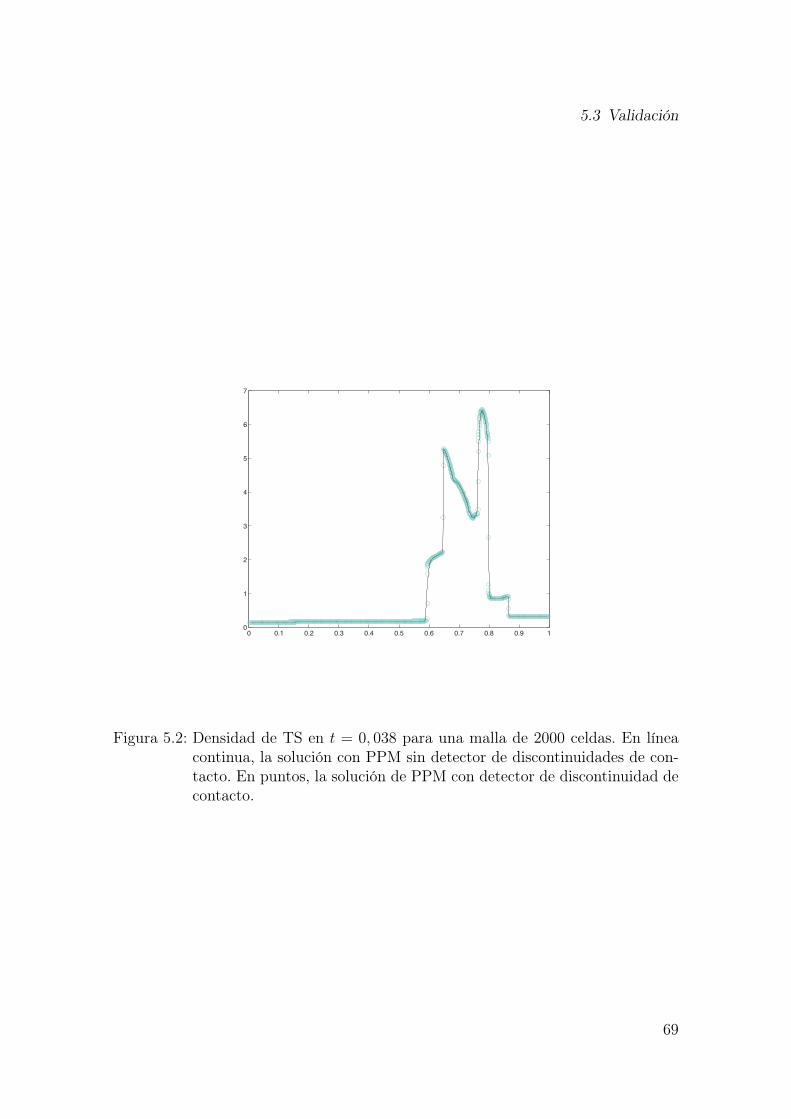
5.3 Validación
! !"# !"$ !"% !"& !"' !"( !") !"* !"+ #!
#
$
%
&
'
(
)
Figura 5.2: Densidad de TS en t = 0, 038 para una malla de 2000 celdas. En líneacontinua, la solución con PPM sin detector de discontinuidades de con-tacto. En puntos, la solución de PPM con detector de discontinuidad decontacto.
69

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
! !"# !"$ !"% !"& !"' !"( !") !"* !"+ #!
#
$
%
&
'
(
)
Figura 5.3: Densidad de TS en t = 0, 038 para una malla de 2000 celdas. En lí-nea continua, la solución con PPM sin detector de discontinuidades decontacto. En puntos, la solución multimaterial.
5.3.2. Test cuadrantes Leveque
El test de los cuadrantes de Leveque es un problema en 2D que plantea unacondición inicial de cuatro problemas de Riemann. Se trata de un dominio cuadrado(0, 1) ⇥ (0, 1) cortado en cuatro partes por las rectas x = 0, 8 e y = 0, 8. En cadauno de los cuatro cuadrantes se imponen condiciones constantes dadas por (5.1). Lascondiciones de frontera son libres en los cuatro lados. La resolución de la simulaciónes 200⇥ 200 celdas.
El test no es un problema especialmente difícil, pero permite poner de manifiestola sensibilidad del código al error numérico. En la figura (5.5) se puede observar unzoom de la interfase entre materiales en el que se aprecia una asimetría respecto ala diagonal. Este error parece tener su origen en la sensibilidad de PPM a errores
70
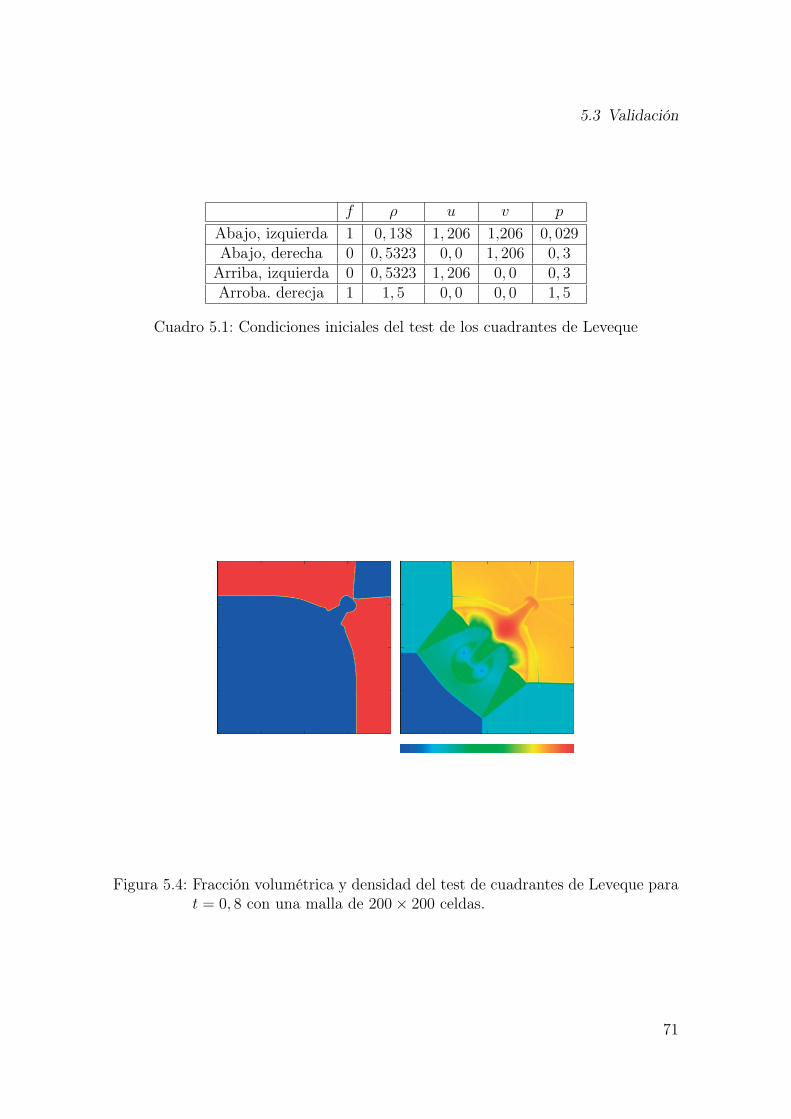
5.3 Validación
f ⇢ u v p
Abajo, izquierda 1 0, 138 1, 206 1,206 0, 029Abajo, derecha 0 0, 5323 0, 0 1, 206 0, 3
Arriba, izquierda 0 0, 5323 1, 206 0, 0 0, 3Arroba. derecja 1 1, 5 0, 0 0, 0 1, 5
Cuadro 5.1: Condiciones iniciales del test de los cuadrantes de Leveque
Figura 5.4: Fracción volumétrica y densidad del test de cuadrantes de Leveque parat = 0, 8 con una malla de 200⇥ 200 celdas.
71
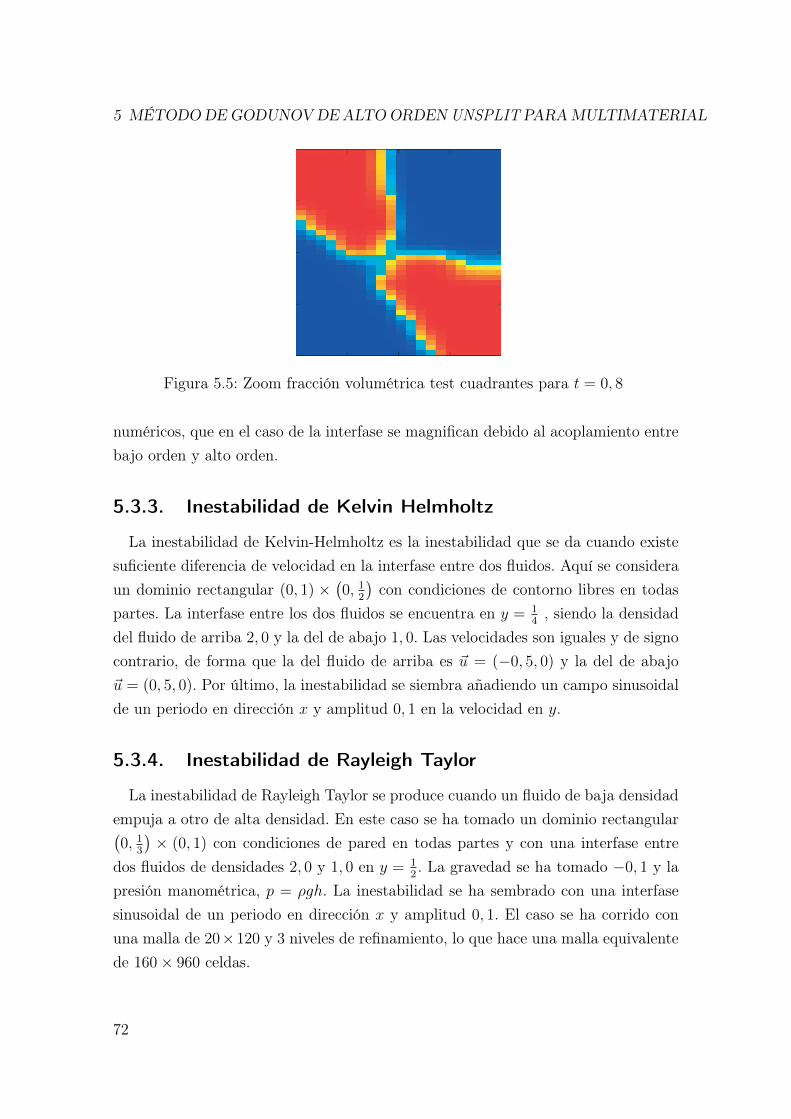
5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Figura 5.5: Zoom fracción volumétrica test cuadrantes para t = 0, 8
numéricos, que en el caso de la interfase se magnifican debido al acoplamiento entrebajo orden y alto orden.
5.3.3. Inestabilidad de Kelvin Helmholtz
La inestabilidad de Kelvin-Helmholtz es la inestabilidad que se da cuando existesuficiente diferencia de velocidad en la interfase entre dos fluidos. Aquí se consideraun dominio rectangular (0, 1) ⇥
�0, 12�
con condiciones de contorno libres en todaspartes. La interfase entre los dos fluidos se encuentra en y =
14 , siendo la densidad
del fluido de arriba 2, 0 y la del de abajo 1, 0. Las velocidades son iguales y de signocontrario, de forma que la del fluido de arriba es ~u = (�0, 5, 0) y la del de abajo~u = (0, 5, 0). Por último, la inestabilidad se siembra añadiendo un campo sinusoidalde un periodo en dirección x y amplitud 0, 1 en la velocidad en y.
5.3.4. Inestabilidad de Rayleigh Taylor
La inestabilidad de Rayleigh Taylor se produce cuando un fluido de baja densidadempuja a otro de alta densidad. En este caso se ha tomado un dominio rectangular�0, 13�⇥ (0, 1) con condiciones de pared en todas partes y con una interfase entre
dos fluidos de densidades 2, 0 y 1, 0 en y =
12 . La gravedad se ha tomado �0, 1 y la
presión manométrica, p = ⇢gh. La inestabilidad se ha sembrado con una interfasesinusoidal de un periodo en dirección x y amplitud 0, 1. El caso se ha corrido conuna malla de 20⇥120 y 3 niveles de refinamiento, lo que hace una malla equivalentede 160⇥ 960 celdas.
72
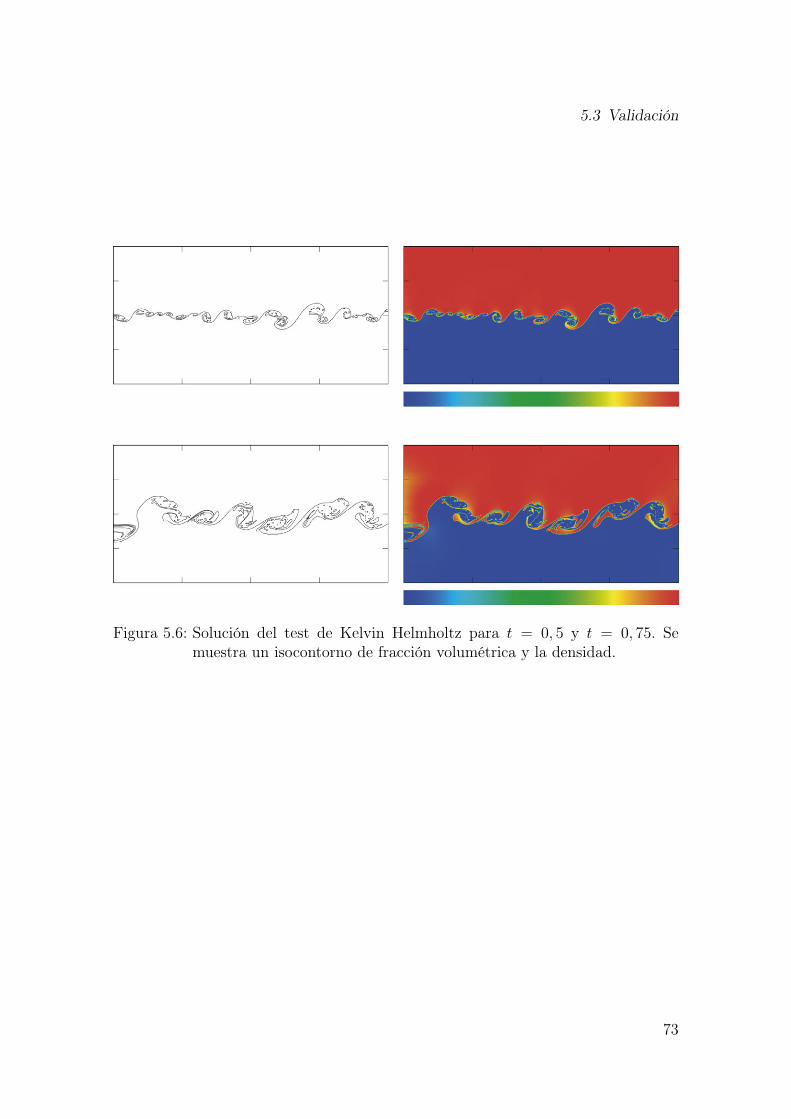
5.3 Validación
Figura 5.6: Solución del test de Kelvin Helmholtz para t = 0, 5 y t = 0, 75. Semuestra un isocontorno de fracción volumétrica y la densidad.
73
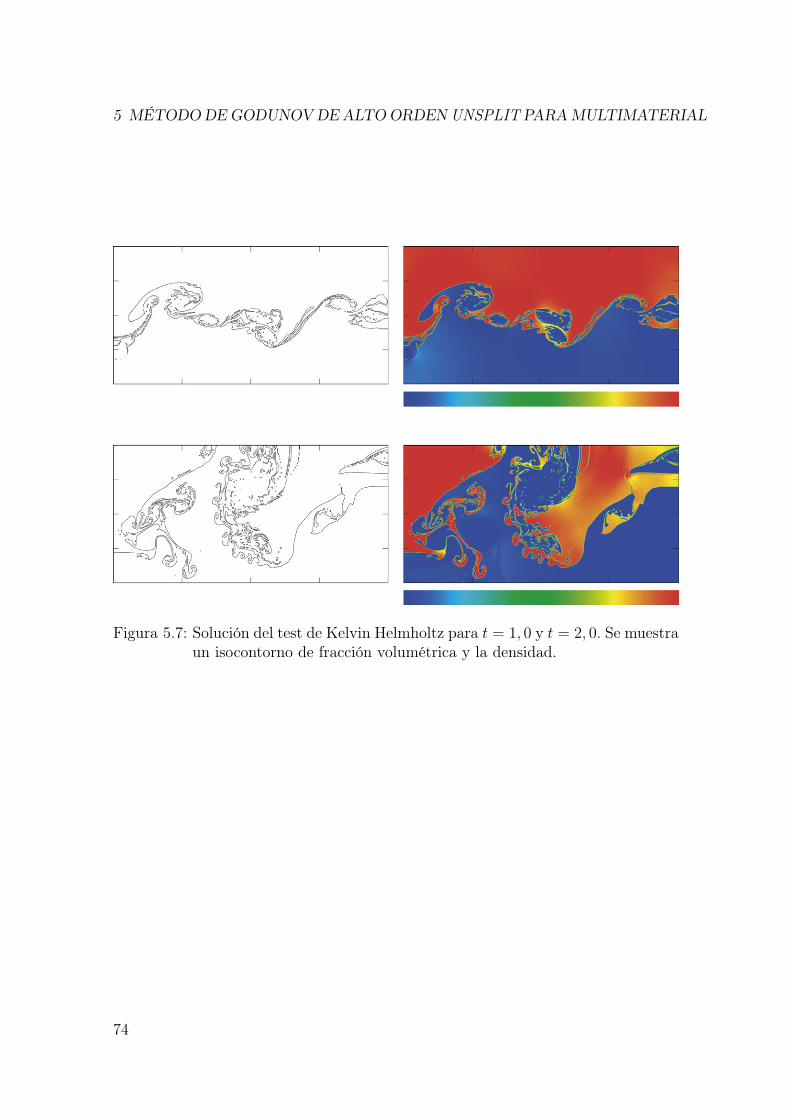
5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Figura 5.7: Solución del test de Kelvin Helmholtz para t = 1, 0 y t = 2, 0. Se muestraun isocontorno de fracción volumétrica y la densidad.
74
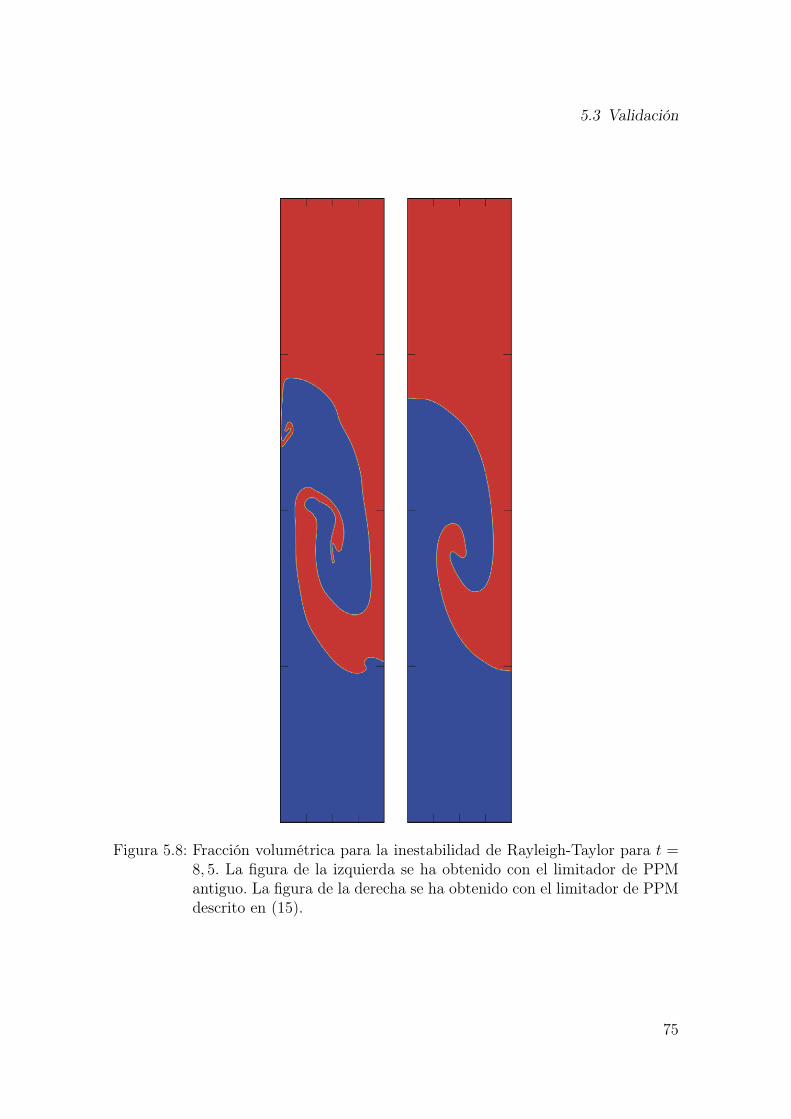
5.3 Validación
Figura 5.8: Fracción volumétrica para la inestabilidad de Rayleigh-Taylor para t =8, 5. La figura de la izquierda se ha obtenido con el limitador de PPMantiguo. La figura de la derecha se ha obtenido con el limitador de PPMdescrito en (15).
75

5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
En la figura de la izquierda de (5.8) se puede observar la fracción volumétrica paraun tiempo t = 8, 5 obtenida con el método expuesto. Se puede ver como la interfaseentre los dos fluidos es estable y no aparecen inestabilidades secundarias espuriascomo en los métodos de alto orden con operador split (1). Sin embargo, tanto en laparte superior como en la inferior de la inestabilidad, se observan entrantes anómalosde fluido. Para solventar este problema se puede cambiar el limitador de PPM paraque se comporte mejor en los extremos. La figura de la derecha muestra el mismocaso usando el limitador de Colella y Sekora (15), cuya acción es notable en losextemos, obteniendo una interfase más estable.
5.3.5. Inestabilidad de Rytchmyer Meshkov
La inestabilidad de Rytchmyer-Meshkov surge cuando una onda de choque inter-acciona con una discontinuidad de contacto. En este test se presenta una explosiónen un dominio rectangular (0, 1) ⇥
�0, 32�
con condiciones de pared en todas susfronteras. En la región r < 0, 1 se impone inicialmente una presión igual a 10, 0 yen el resto del dominio 0, 1. La densidad es inicialmente 1, 0 en todo el dominio. Lasimulación que se presenta se ha llevado a cabo en un cuarto del dominio con unamalla de 200⇥ 300 celdas.
Al ser el dominio rectangular no cuadrado y haber condiciones de pared, se daninteracciones de ondas de choque complejas con las que interacciona el fluido pocodenso que queda detrás de la onda de choque de la explosión. Estas interaccionesdan lugar a una estructura inestable producida por las inestabilidades de Rytchmyer-Meshkov (figuras (5.9) y (5.10)).
5.3.6. Burbuja
Por último se presenta el test de la burbuja. Este problema simula la interacciónde una burbuja con una onda de choque. El problema es como el que se representaen la figura (5.11) y el que se puede encontrar en (19).
Aunque sólo de forma cualitativa, el test permite comparar con un experimentoreal y con el método GFM no conservativo. Los resultados de la evolución de lainterfase son cualitativamente muy buenos, obteniendo la misma estructura que enel experimento y que el GFM.
Para comparar con GFM, se ha medido la masa de la burbuja no conservada en la
76
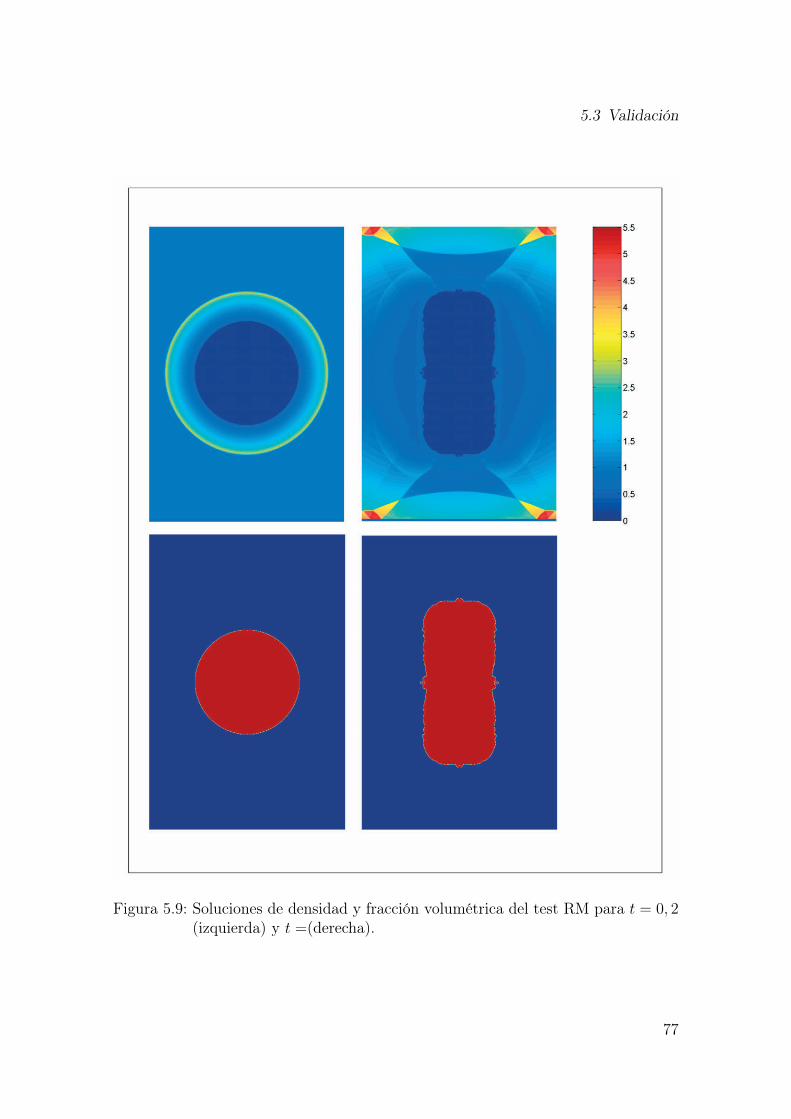
5.3 Validación
Figura 5.9: Soluciones de densidad y fracción volumétrica del test RM para t = 0, 2(izquierda) y t =(derecha).
77
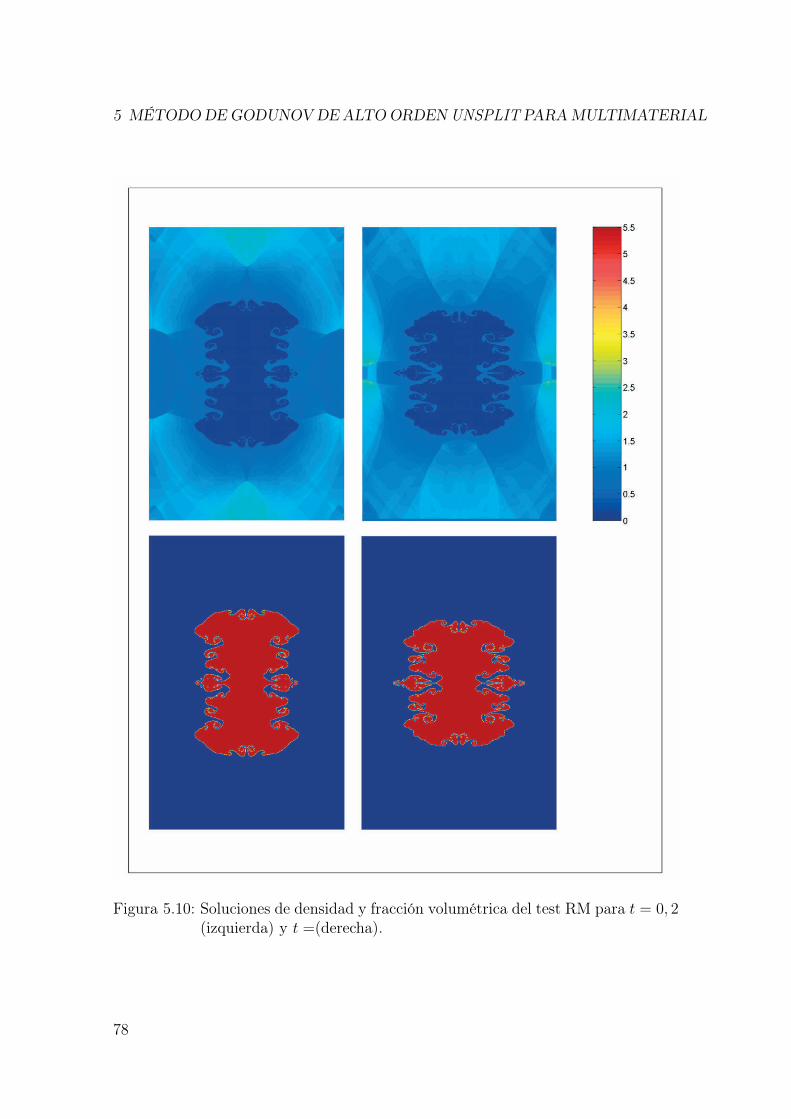
5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Figura 5.10: Soluciones de densidad y fracción volumétrica del test RM para t = 0, 2(izquierda) y t =(derecha).
78
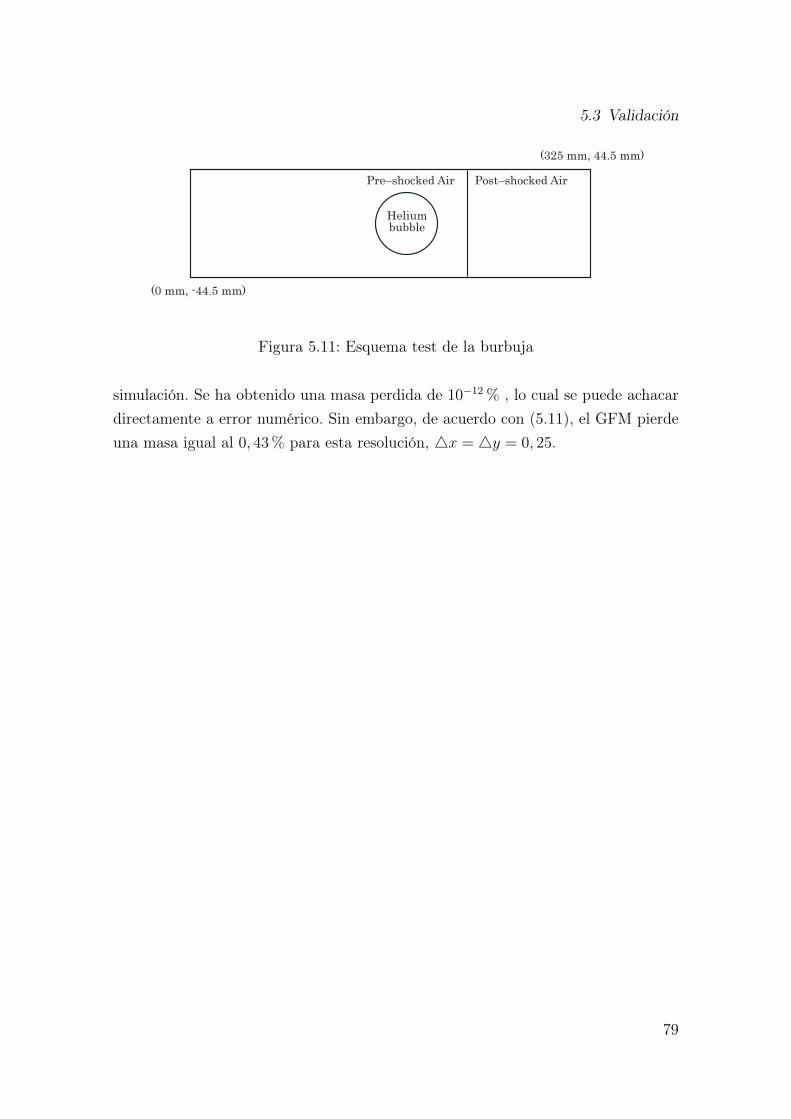
5.3 Validación
Heliumbubble
Pre–shocked Air Post–shocked Air
(325 mm, 44.5 mm)
(0 mm, -44.5 mm)
Figura 5.11: Esquema test de la burbuja
simulación. Se ha obtenido una masa perdida de 10
�12% , lo cual se puede achacar
directamente a error numérico. Sin embargo, de acuerdo con (5.11), el GFM pierdeuna masa igual al 0, 43% para esta resolución, 4x = 4y = 0, 25.
79
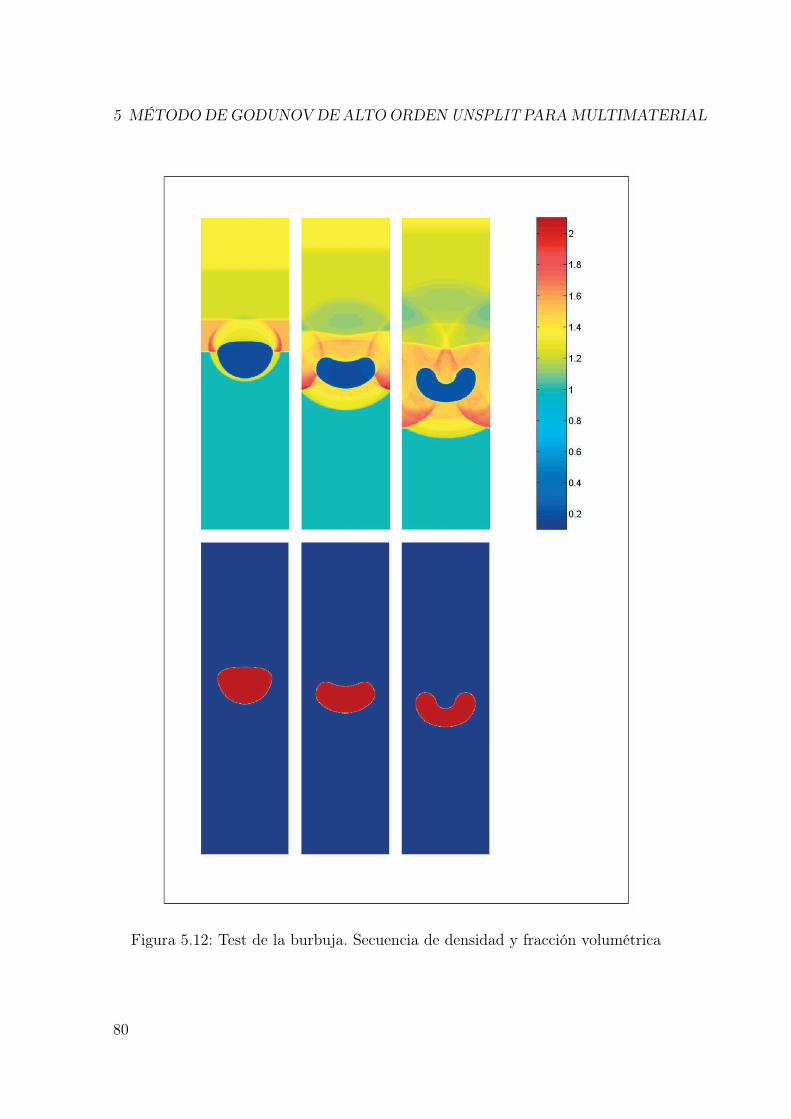
5 MÉTODO DE GODUNOV DE ALTO ORDEN UNSPLIT PARA MULTIMATERIAL
Figura 5.12: Test de la burbuja. Secuencia de densidad y fracción volumétrica
80
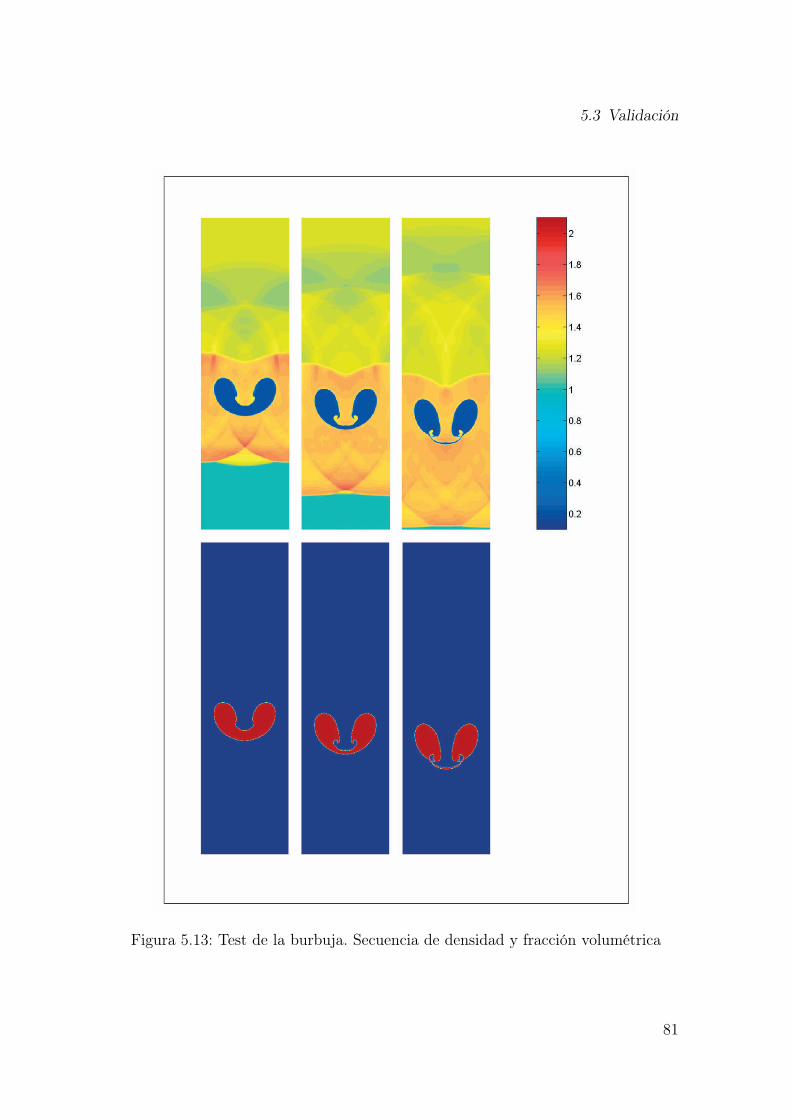
5.3 Validación
Figura 5.13: Test de la burbuja. Secuencia de densidad y fracción volumétrica
81

6 SIMULACIÓN SUPERNOVA Ia
Uno de los problemas de más actualidad en astrofísica es el estudio de los pro-genitores de las supernovas de tipo Ia (SN Ia). Varias investigaciones, tanto experi-mentales como teóricas, parecen sugerir que la explosión termonuclear de una enanablanca puede ser la causa más probable. Uno de estos escenarios es el llamado es-cenario degenerado (SD por sus siglas en inglés), en el que la explosión tiene lugaren un sistema binario compuesto por una enana blanca y una estrella secundaria.Asumiendo este escenario, se han realizado simulaciones de gran escala para estu-diar las consecuencias del impacto con la estrella compañera en la evolución de lasupernova ((20), (33), (40)).
En este capítulo se presenta la simulación del choque de la interacción entre elmaterial expulsado por la supernova y la estrella compañera en el laboratorio. Dadoque las velocidades alcanzadas en el caso real son del orden de 8500
kms
y en el labo-ratorio son más de un factor más pequeños, los resultados obtenidos son cualitativos,pero útiles para interpretar las simulaciones de gran escala
6.1. Experimento
La simulación del remanente de una supernova en el laboratorio ha sido estudiadapor Drake et. al. En (18) se prueba como la estructura del remanente se puedeobtener a partir de la aceleracion de un plasma que colisiona con una espuma,produciéndose una onda de choque hacia adelante en la espuma (forward shock),una hacia atrás en el plasma (reverse shock) y una discontinuidad de contacto entreellas.
En el caso aquí presentado, el diseño del experimento es similar al usado por Kanget al (69), obteniendo resultados similares a (69) y (18) en la evolución del rema-nente. La figura (6.1) representa el esquema del experimento, que consiste en unaplaca de plástico ⇢CH = 1004
kgm3 , un hueco vacío para estabilizar el plasma tras la
83

6 SIMULACIÓN SUPERNOVA Ia
Figura 6.1: Esquema del experimento propuesto
evaporación del plástico, y una placa de espuma para obtener la estructura de re-manente de supernova, que es el equivalente en el laboratorio al espacio interestelar;además se tiene inmediatamente después de la espuma una esfera de estaño con unaparte externa de menor densidad para simular la estrella compañera y su atmósfera.Basándose en los datos de simulaciones de gran escala de (33) y (20), la masa quese arranca a la estrella compañera es aproximadamente un 10% de la masa total,que es el valor que tiene la parte de baja densidad de la esfera con respecto a lamasa total de ésta. Además, como el objetivo es describir la evolución temporal delmaterial arrancado, aguas arriba de la espuma y donde no está la esfera de estañosólo hay vacío. Por otra parte, los parámetros del láser se toman como en Kang etal.
6.2. Resultados de la simulación
Se ha realizado la simulación numérica del experimento presentado más arriba conel código ARWEN, utilizando el método fluidodinámico multimaterial presentado enesta tesis junto al solver de conducción térmica para reproducir la deposición lásery transporte de radiación. Sin embargo, para hacer el cálculo más rápido y dadoque de acuerdo con (18) la radiación tiene poca influencia en la evolución posteriora la deposición láser, se ha desactivado la radiación justo antes del choque de laestructura FCR con la esfera. La simulación se ha realizado con geometría cilíndricaaxisimética tomando la mitad de la figura (6.1) como dominio y usando AMR conuna resolución de 24 ⇥ 120 con 4 niveles de refinamiento, lo que equivale a una
84

6.2 Resultados de la simulación
1
10
100
1000
10000
0 100 200 300 400 500
Densi
ty (
kg/m
3)
Distance (µm)
Figura 6.2: Perfil de densidad en el eje. Se puede observar la estructur FCR carac-terística del remanente de supernova
resolución de 384⇥ 1920 celdas.
Como se puede ver en la figura (6.2), se obtiene la estructura FCR y los resultadosestán en concordancia con los obtenidos en (18) y (69). Además, se ha obtenido unnúmero de Euler, i.e. Eu = v
q⇢p, aproximadamente igual a 3, 1, que es similar al
obtenido para SNR.
En la figura (6.3) se pueden observar los resultados de densidad y fracción vo-lumétrica de la simulación. En la figura (a) se puede ver el impacto inicial de laestructura FCR con la esfera de estaño, 0, 67 ns después del primer contacto. Sepuede ver la región de alta presión en el lugar del impacto y una onda de choqueatravesando la esfera sólida de alta densidad, así como otra reflejada yendo haciaatrás. Además, obsérvese como la capa de material poco denso ha sido totalmentecomprimido por la forward shock.
La figura (6.3) (b) representa la simulación 1, 84 ns después del contacto inicial.Como se puede ver, la forward shock se ha reflejado en el eje y el gas de la partesuperior de la esfera ya ha sido comprimido. Por otra parte, el gas de la parte inferiorde la esfera ha sido arrancado y ha quedado confinado en un toro, al igual que sedescribe en Marietta et al. para simulaciones de gran escala. Además, se puede
85
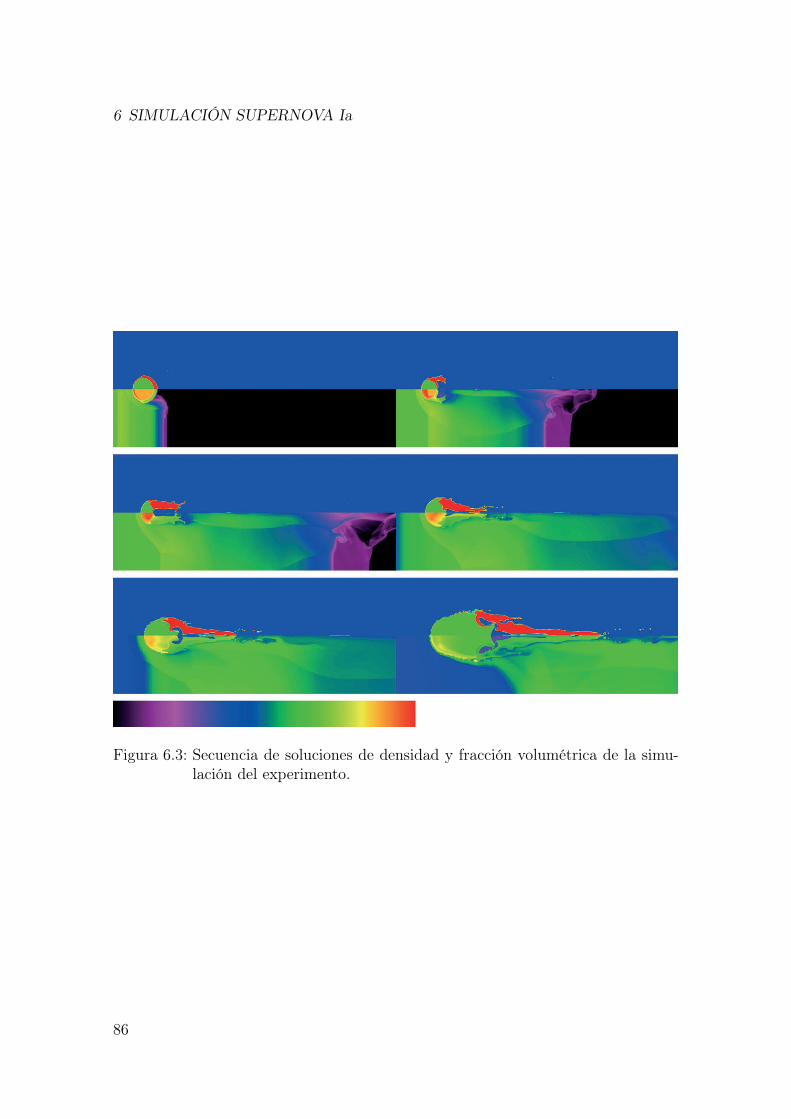
6 SIMULACIÓN SUPERNOVA Ia
Figura 6.3: Secuencia de soluciones de densidad y fracción volumétrica de la simu-lación del experimento.
86

6.2 Resultados de la simulación
observar un pequeño vórtice aguas arriba de la esfera producido por la envoltura delCH a la esfera.
La figura (c) representa el impacto tras 2, 67 ns. En este momento el materialarrancado es prácticamente vertical, pero va a ser empujado hacia el eje, debido ala geometría plana y no esférica de la estructura FCR, como se puede ver en lassiguientes figuras. Por último, en las figuras (e) y (f) se puede ver la evolución entiempos avanzados (4, 97 ns y 8, 16 ns respectivamente). La etapa violenta en la quese arranca material ya ha terminado y la esfera comienza a expandirse. Obsérvesecomo una gran cantidad de gas se encuentra localizado cerca del eje y no se puedeexpandir debido al CH.
Los resultados de la simulación indican la importancia de la geometría plana dela explosión y de la estructura FCR que se genera en la distribución de la masaarrancada. En la figura (6.4) se puede observar la comparación de la distribución dela masa arrancada en la simulación de gran escala y en la simulación del experimentode laboratorio aquí presentado. Además, también se ha representado el caso parageometría esférica con radio equivalente a la simulación corrida con SPH. En pri-mer lugar, obsérvese como en las simulaciones con ARWEN, tanto en el caso planocomo en el esférico, aproximadamente un 2, 5% de la masa del gas es fuertementecomprimida en el choque inicial y no es arrancada.
Por otro lado, queda claro, a la vista de esta gráfica, el fuerte efecto que producela geometría plana en el empuje del material hacia el eje, como era de esperar. Sinembargo, si se tiene en cuenta la geometría esférica equivalente a la simulación degran escala con SPH, los resultados son cualitativamente similares y las diferenciaspueden suponerse debidas a las distintas condiciones en las simulaciones, como elhecho de que en el caso de SPH se toma una distribución radial de la densidad de laestrella compañera y además se tiene en cuenta el efecto de la gravedad, así como alas diferentes resoluciones.
87
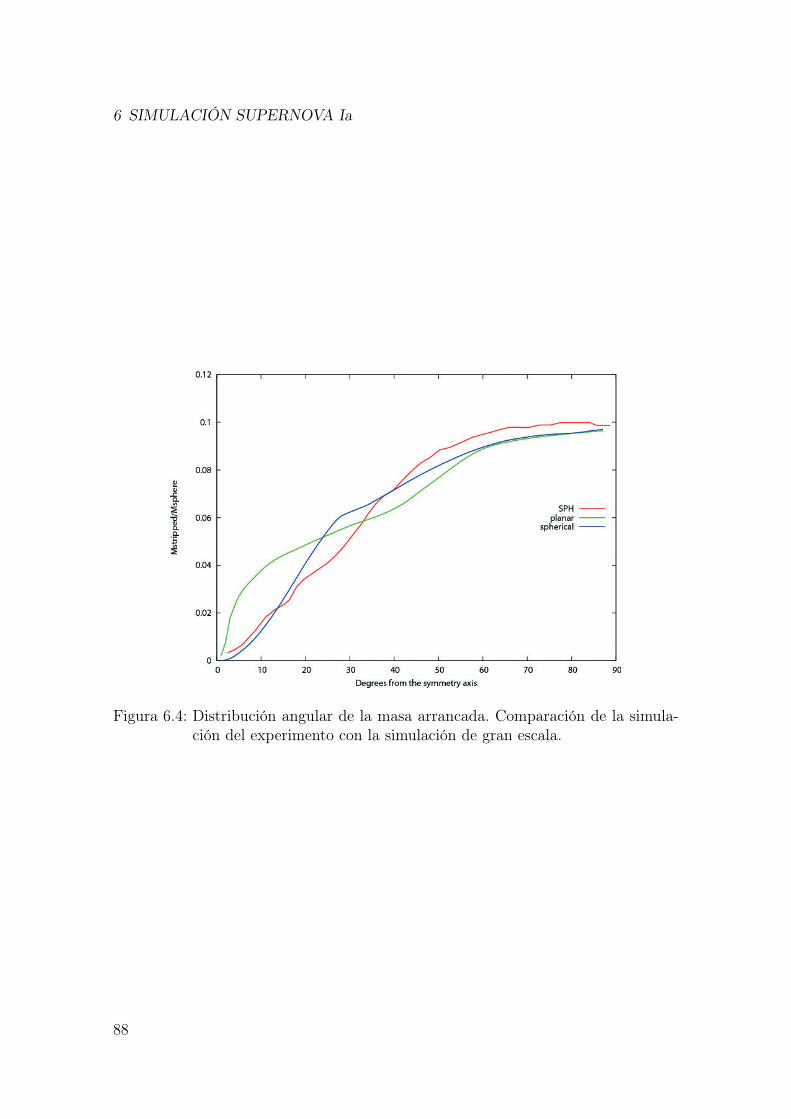
6 SIMULACIÓN SUPERNOVA Ia
Figura 6.4: Distribución angular de la masa arrancada. Comparación de la simula-ción del experimento con la simulación de gran escala.
88
7 SIMULACIÓN DE JETS
En este capítulo se presentan los resultados obtenidos con el código ARWEN enla simulación de formación de jets. En primer lugar se introduce la teoría básicapara flujo compresible para este problema; haciendo un estudio analítico para flujosupersónico y gas ideal y comparándolo con los resultados obtenidos para el casoreal. A continuación se analizan los resultados obtenidos con las simulaciones y secomparan con los experimentos realizados en PALS.
7.1. Teoría
Bajo ciertas condiciones la colisión oblicua de dos sólidos puede dar lugar a laformación de jets de alta velocidad. De forma simplificada pueden considerarse dosplacas idénticas formando un ángulo � con respecto al plano de simetría y movién-dose con velocidad normal a su superficie vp. Para el caso de flujo incompresible,según la teoría siempre se produce jet, tanto en geometría cartesiana, como cilín-drica (6). Sin embargo, para el caso plano, experimentalmente se observa que paraciertas condiciones, no se produce jet. Para estudiar la configuración con o sin jethace falta tener en cuenta la compresibilidad del material y estudiar el flujo tantoen régimen subsónico como en supersónico.
En caso de régimen subsónico, la teoría predice la existencia de jet siempre ((6),(8)). Sin embargo, en el caso de flujo plano supersónico, se forma jet sólo bajociertas condiciones. Estas condiciones dependen de que se dé o no una onda dechoque atada al punto de remanso del sistema. Como se verá a continuación, paraun flujo incidiendo en un plano inclinado, existe un ángulo crítico a partir del cualno puede existir una onda de choque atada al punto de remanso de ese sistema. Laformación de jet para flujo supersónico depende de este hecho, estableciéndose elsiguiente criterio (8):
Si � > �c, entonces se produce jet.
89
7 SIMULACIÓN DE JETS
Si � < �c, entonces no se produce jet.
Para el caso de geometría cilíndrica, Birkhoff y Walsh demostraron que una configu-ración sin jet es imposible en caso de flujo puramente cónico. Sin embargo, para uncaso más general, Chou establece, basado en resultados experimentales, que las con-diciones se pueden aproximar al caso plano, por lo que la teoría plana es adecuadaen el criterio de formación de jets en el caso de simetría axial (8).
A continuación se detalla el estudio del problema para flujo plano supersónico.En ese caso, la teoría expuesta anteriormente predice la aparición de jet sólo bajociertas condiciones. En particular, se produce jet si no hay una onda de choqueoblicua ligada al punto de remanso; no produciéndose jet en caso de que exista. Elestudio de la existencia de la onda de choque oblicuo ligada al punto de remansoen un flujo supersónico es un problema conocido, llegándose a la conclusión de quepor debajo de un ángulo crítico de las placas con respecto al plano de simetría seproduce la onda de choque oblicua ligada; mientras que si el ángulo es mayor seproduce una onda de choque aguas arriba del punto de remanso.
Figura 7.1: Problema de onda de choque oblicua ligada al punto de remanso. � re-presenta el ángulo de la dirección del flujo despúes de la onda de choquecon respecto a la dirección del flujo antes de la onda de choque. � es elángulo de la onda de choque respecto a la dirección del flujo antes de laonda de choque.
90

7.1 Teoría
7.1.1. Relaciones de salto
Supóngase entonces el problema con la existencia de la onda de choque oblicualigada. En primer lugar, se establecen las ecuaciones de continuidad,
⇢1vn1 = ⇢2vn2 (7.1)
conservación de la cantidad de movimiento (tangencial y normal con respecto a laonda de choque)
(⇢1vn1) vt1 = (⇢2vn2) vt2 (7.2)
p1 � p2 = ⇢2v2n2 � ⇢1v
2n1 (7.3)
y conservación de la energía
vn1
✓p1 + ⇢1e1 + ⇢1
v2n12
◆= vn2
✓p2 + ⇢2e2 + ⇢2
v2n22
◆(7.4)
Despejando vn1 y vn2 de (7.1) y (7.3) y sustituyendo en (7.4), se obtiene la relaciónde Rankine Hugoniot
e2 � e1 =1
2
(p2 + p1)
✓1
⇢1� 1
⇢2
◆(7.5)
La manipulación de estas ecuaciones permite estudiar el problema de la existenciade onda de choque oblicua ligada al punto de remanso.
7.1.2. Gas ideal
Se estudia en primer lugar el caso de gas ideal, pues se puede obtener soluciónanalítica. La ecuación (7.6) se puede escribir como
cp (T1 � T2) =v22 � v21
2
(7.6)
De la ecuación de continuidad y de la conservación de la cantidad de movimientotangencial, se obtiene
vt1 = vt2 (7.7)
por lo que v22�v21 = (v2t2 + v2n2)�(v2t1 + v2n1) = v2n2�v2n1. Además, teniendo en cuenta
91

7 SIMULACIÓN DE JETS
que para gas ideal cpT = cp
⇣p⇢R
⌘=
���1
p⇢, la ecuación de conservación de la energía
queda�
� � 1
✓p2⇢2� p1⇢1
◆=
v2n2 � v2n12
(7.8)
Las ecuaciones (7.1), (7.2), (7.3) y (7.8) definen completamente el problema. Dadoun estado inicial, 1, el estado después de la onda de choque, 2, queda determinadopor las cuatro ecuaciones mencionadas. Manipulando estas ecuaciones y teniendo encuenta las relaciones con el ángulo de las placas con el plano de simetría (�) y elángulo de la onda de choque oblicua (�), se pueden obtener útiles relaciones entre�, �, M1, M2, p2
p1y ⇢2
⇢1.
Reorganizando la ecuación (7.3)
p2 � p1 = ⇢1v2n1 � ⇢2v
2n2
= ⇢1v2n1
⇣1� ⇢2
⇢1
v2n2
v2n1
⌘= ⇢1v
2n1
⇣1� ⇢1
⇢2
⌘
de dondev2n1 =
p2 � p2⇢2 � ⇢1
⇢2⇢1
(7.9)
De forma análoga se obtienev2n2 =
p2 � p2⇢2 � ⇢1
⇢1⇢2
(7.10)
y multiplicando estas ecuaciones
vn1vn2 =p2 � p2⇢2 � ⇢1
(7.11)
Sustituyendo (7.9) y (7.10) en (7.8) se obtiene la relación entre p2p2
y ⇢2⇢1
p2p1
=
�+1��1
⇢2⇢1� 1
�+1��1 �
⇢2⇢1
(7.12)
⇢2⇢1
=
�+1��1
p2p1
+ 1
�+1��1 +
p2p1
(7.13)
92

7.1 Teoría
Por otra parte, por la geometría del problema se tiene
vt1 = v1 cos �
vt2 = v2 cos (� � �)
vn1 = v1 sin �
vn2 = v2 sin (� � �)
(7.14)
Dado que vt1 = vt2, se tiene que
v1v2
=
cos (� � �)
cos �
y de la ecuación de continuidad y las relaciones (7.14)
⇢1v1 sin � = ⇢2v2 sin (� � �)
Por lo que⇢2⇢1
=
v1v2
sin �
sin (� � �)=
tan �
tan (� � �)(7.15)
Sustituyendo en (7.3)
p2 � p1 = ⇢1v2n1
✓1� ⇢1
⇢2
◆= ⇢1v
21 (sin �)
2
✓1� ⇢1
⇢2
◆
y dividiendo por p1 y teniendo en cuenta que ⇢1v21 = �p1M21 se obtiene la siguiente
relaciónp2p1
= 1 + �M21 (sin �)
2
✓1� ⇢1
⇢2
◆(7.16)
Si en lugar de sacar factor común ⇢1v21 en (7.3), se saca ⇢2v22, se obtiene la siguiente
relación análoga a la anterior
p1p2
= 1 + �M22 (sin (� � �))2
✓1� ⇢2
⇢1
◆(7.17)
Las ecuaciones (7.12), (7.15), (7.16) y (7.17) forman un sistema de cuatro ecua-ciones en las seis variables �, �, M1, M2, p2
p1y ⇢2
⇢1. Tomando dos de ellas como
independientes, el sistema queda determinado. Estas ecuaciones muestran que dadoun número de Mach inicial M1, existe un ángulo límite, �c, a partir del cual la ondade choque no está ligada al punto de remanso y la onda de choque se encuentra
93
7 SIMULACIÓN DE JETS
0 0.5 1 1.5 2 2.5 30
5
10
15
20
25
30
35
40
M=32M=8M=2
Figura 7.2: Ángulo crítico para gas ideal con � =
53
aguas abajo. De hecho, existe un ángulo máximo a partir del cual la onda de cho-que oblicua ligada no es posible para cualquier número de Mach inicial. En estascondiciones, no es posible la producción de jets a partir de la colisión de dos placassólidas planas.
7.1.3. Gas real
El estudio del ángulo crítico para gas real es análogo al ideal, salvo que para el casoreal no hay una solución analítica, al no existir expresión analítica de la ecuación deestado. En el caso de las ecuaciones de estado utilizadas en esta tesis, las curvas deángulo crítico en el caso real son asintóticas a la de gas ideal. Es decir, para altasvelocidades, las soluciones de gas real e ideal son muy próximas. Sin embargo, paravelocidades más bajas
�v1 < 500
kms
�las soluciones son distintas. En el caso real, la
curva crece rápidamente hasta alcanzar un máximo para una velocidad que dependedel material y luego desciende asintóticamente a la curva de gas ideal.
7.2. Experimentos de formación de jets
En PALS se han desarrollado una serie de experimentos con el fin de demostrarla formación de jets para el estudio de problemas astrofísicos y para fusión por
94
7.2 Experimentos de formación de jets
confinamiento inercial (24). Basándose en los resultados teóricos, han diseñado unexperimento en el que se irradia un blanco cónico con un láser de alta potencia. Deesta forma se obtienen dos plasmas chocando en el vértice del blanco cónico, lo queorigina un jet como resultado de la colisión.
Los blancos cónicos son de oro y aluminio con espesores de 6 µm y 9 µm res-pectivamente. La longitud de onda del láser es � = 1, 315 µm, la energía 550 J. Elpulso tiene una duración de 300 ps y un ancho de 100 µm (FWHF). En el caso dela simulación con ARWEN, el pulso se ha definido como hipergaussiano, pero no setiene información de los datos experimentales.
Las figuras (7.3), (7.4), (7.5) y (7.6) representan la solución de la fracción volu-métrica, densidad, temperatura y número de Mach (limitado a 1, 0) en diferentesinstantes de tiempo. La temperatura máxima que se alcanza en la simulación es de22 keV en 1 ns, en el máximo del pulso láser, y la temperatura del jet es aproxi-madamente de 13 eV. Transcurrido 1 ns después del máximo del pulso, el jet ya haavanzado 620 µm , lo que quiere decir que en ese tiempo tiene una velocidad mediade 620
kms
. Sin embargo, esta velocidad media no es real porque el jet ya se haformado en el instante que se está considerando como cero, pero es una medida útilpara comparar con los experimentos. A partir de aproximadamente 1, 25 ns despuésdel pulso, el jet comienza a desacelerarse lentamente, alcanzando una velocidad de440
kms
pasados 5 ns. Como se aprecia en las figuras, el jet es totalmente supersónico.
En (24) la velocidad media que obtuvieron en este experimento durante el pri-mer nanosegundo tras el pulso fue 800
kms
, que está lejos del valor obtenido en lasimulación. No obstante, según (24), el espesor del blanco es menor al utilizado enlas simulaciones, pues se cree que se pierde alrededor de un 30% en su preparaciónpara el experimento. Este hecho podría explicar la diferencia en velocidad.
La siguiente medida experimental que se tiene es 4 ns después del pulso y segúnesta medida el jet se ha frenado mucho, reduciendo su velocidad a menos de la mi-tad. Este hecho no se aprecia en las simulaciones donde el jet se frena, pero muchomenos, pasando a tener una velocidad próxima a los 450
kms
. Esta desaceleraciónsigue una ley aproximadamente t�0,15. Asumiendo que la evolución fuera puramentefluidodinámica, la solución de la simulación se acerca más a un jet plano que a unoesférico, que es similar a lo obtenido tanto en los experimentos como en la simula-ción. En el experimento podrían estar perdiendo información al medir únicamentela densidad electrónica a partir de 10
18 ecm3 , dado que no parece haber razón para
95
7 SIMULACIÓN DE JETS
Figura 7.3: Solución del jet de aluminio en t = 0, 0 ns. Se representa, en ordende izquierda a derecha, fracción volumétria, densidad, temperatura ynúmero de Mach
96

7.2 Experimentos de formación de jets
Figura 7.4: Solución del jet de aluminio en t = 1, 0 ns. Se representa, en ordende izquierda a derecha, fracción volumétria, densidad, temperatura ynúmero de Mach
97

7 SIMULACIÓN DE JETS
Figura 7.5: Solución del jet de aluminio en t = 2, 5 ns. Se representa, en ordende izquierda a derecha, fracción volumétria, densidad, temperatura ynúmero de Mach
98

7.2 Experimentos de formación de jets
Figura 7.6: Solución del jet de aluminio en t = 4, 0 ns. Se representa, en ordende izquierda a derecha, fracción volumétria, densidad, temperatura ynúmero de Mach
99
7 SIMULACIÓN DE JETS
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5350
400
450
500
550
600
tiempo (ns)
velo
cidad d
el j
et en e
l eje
(km
/s)
velocida simulación
ley t!0,15
Figura 7.7: Velocidad del jet en el eje (línea continua). En línea discontinua desace-leración siguiendo una ley del tipo t�0,15
que el jet se frene tanto.
En la simulación se obtienen densidades electrónicas superiores en el frente deljet�2 · 1019 e
cm3
�a la tomada como referencia en el experimento
�10
18 ecm3
�, lo que
podría indicar un enfriamiento debido a la radiación que no se ha contabilizado en elcálculo numérico, posiblemente por estar perdiendo información en las opacidades dealgún grupo relevante en el régimen de interés. La pérdida del efecto de la radiaciónestaría dando como resultado un jet más caliente, por lo que la ionización podría sermayor de lo que es realmente y, por tanto, se obtendrían unas densidades electrónicassuperiores a las reales, como así sucede.
Desafortunadamente, no se dispone de la descripción completa del experimento,quedando varias incertidumbres por resolver, como la definición del pulso láser, elorigen de medición de los datos o el espesor exacto de los blancos. Además, la me-dición de la densidad electrónica en el experimento no parece ser la más indicada,pues según los datos de (24), el jet se frena más de lo que cabría esperar por unaexpansión pura de un jet con geometría más cercana a la plana que a la esférica. Sinembargo, la velocidad punta del jet en el primer nanosegundo, cuando la densidaddel jet es suficientemente alta y las comparaciones entre la simulación y las medicio-nes del experimento son posibles, es muy similar teniendo en cuenta la incertidumbreen el espesor. En la figura (7.7) se representa la velocidad del jet obtenida en variassimulaciones en las que se ha variado la energía del láser, dejando los demás paráme-
100
7.2 Experimentos de formación de jets
0 100 200 300 400 500 600 7000
100
200
300
400
500
600
700
Energi�a del laser (J)
v (k
m/s
)
velocidad ma�xima
velocidad a partirde la posicion del jet en 1ns
Figura 7.8: Velocidad máxima del jet obtenida para diferentes energías de láser. Losdatos azules representan la velocidad máxima obtenida en la simulación.Los datos rojos representan la posición del jet en el eje 1 ns después delmáximo del pulso láser.
tros constantes. Se reepresenta tanto la velocidad máxima obtenida en la simulacióncomo la velocidad media obtenida como resultado de medir la posición del jet en eleje en el primer nanosegundo. A la vista de los resultados, la velocidad máxima deljet crece con la energía con una ley e0,4, lo que deja margen para obtener jets conmejores propiedades.
Se está llevando a cabo un estudio de las opacidades disponibles en el rango quese está considerando en este problema para poder solucionar la diferencia obtenidaden densidades electrónicas y así poder comparar los resultados de las simulaciones yde los experimentos. Esto permitiría utilizar ARWEN para optimizar la formaciónde jets en el laboratorio.
101

8 CONCLUSIONES
A continuación se resume el trabajo realizado y se detallan los puntos más impor-tantes desarrollados durante la realización de esta tesis.
En primer lugar se ha sustituido todo el paquete de fluidodinámica del códigoARWEN por un código unsplit con PPM y se han realizado numerosos tests paracomprobar la implementación.
Partiendo de los trabajos de Miller y Puckett y de Colella y Glaz, se ha desarro-llado un método conservativo unsplit para la resolución de las ecuaciones de flui-dodinámica con varios materiales. Este método consiste en considerar un materialúnico de la misma manera que en (36) para obtener las soluciones de los problemasde Riemann en las caras de las celdas. A partir de estas soluciones, se calculan losflujos en dichas caras. En el caso de las celdas consideradas multimaterial (las quetienen más de un material o son vecinas de celdas con más de un material), el cálculode los flujos se hace con la ayuda de un algoritmo de tipo Volume Of Fluid (VOF),al igual que en (36). En el caso de esta tesis, ese algoritmo es ELVIRA. A diferenciade (36) en esta tesis se ha utilizado un operador unsplit. Este algoritmo resulta máscomplicado de implementar, al tener que considerar las derivadas transversales parael PPM y al multiplicarse las posibilidades de advección en el caso de los flujos deceldas multimaterial. Sin embargo, se comporta mejor en general al no crear falsosefectos producidos por los pasos unidimensionales del split, como se ha podido veren el ejemplo de Rayleigh-Taylor.
La discretización utilizada es equivalente a la usada en (36) pero teniendo encuenta el operador unsplit y utilizando las aproximaciones de velocidad y presión enla ecuación de la energía descritas en (5), que no se aclaran en (36).
Se ha usado también un algoritmo para relajar la presión de la misma forma que(36), pero se ha introducido un subproceso iterativo, debido a que las restriccionesque se imponían en el artículo no eran suficientes en el caso de las EOS utilizadas,encontrándose lugares donde la linealización no es válida tampoco para los pequeños
103

8 CONCLUSIONES
saltos de presión impuestos.Además, se ha acoplado este código multimaterial a ARWEN, lo que ha requerido
el acoplamiento del código a la conducción y radiación. Por lo que se ha debidoimplementar el reparto de energía de forma correcta.
Por último, se han realizado simulaciones de experimentos con plasmas con variosmateriales. En primer lugar, se han presentado las soluciones obtenidas para la pro-puesta de un experimento en el que se pretende estudiar interacción del remanentede una supernova tipo Ia con la estrella compañera y el material que le arranca.Estos resultados se han comparado con las simulaciones de gran escala llevadas acabo en (20), obteniéndose resultados muy satisfactorios.
Por otra parte, se han realizado simulaciones de experimentos de formación de jetsmediante la colisión de dos plasmas a gran velocidad. Los resultados se han compa-rado con los obtenidos experimentalmente en PALS, obteniéndose buenas aproxima-ciones teniendo en cuenta las incertidumbres del experimento. Se ha demostrado queARWEN puede ser una herramienta muy potente a la hora de mejorar y optimizareste tipo de experimentos.
8.1. Trabajo futuro
Para terminar esta tesis, se lista una serie de posibles mejoras y líneas de estudioque se pueden seguir:
Estudio del limitador de PPM. Existen en la literatura al menos dos limitadores((15) y (34)) que se comportan mejor que el limitador original de PPM enlos extremos. El limitador de Colella y Sekora está implementado, pero nosuficientemente probado.
Estudio de CTU de segundo orden. También está implementado, pero en estecaso no se ha llevado a cabo ninguna prueba. El CTU podría dar lugar amejoras en la resolución de la interfase, que es el punto más débil del métodopresentado.
Estudio de formación de jets con ARWEN. Las posibilidades para simular laformación de jets con varios materiales son enormes.
104

8.1 Trabajo futuro
Paso a 3D. El paso del solver unsplit para un material a 3D es relativamentesencillo. Sin embargo, el paso de multimaterial requiere mucho más tiempo,al cambiar por completo los algoritmos, tanto ELVIRA como el cálculo de losflujos.
105
Bibliografía
[1] Almgren AS, Beckner VE, Bell JB, Day MS, Howell LH, Joggerst CC, LijewskiMJ, Nonaka A, Singer M, Zingale M, Castro: A new compressibla astrophysicalsolver. I. Hydrodynamics and self-gravity, The Astrophysical Journal, 715:1221-1238 (2010).
[2] Bell JB, Dawson CN, Shubin GR, An unsplit, higher order Godunov method forscalar conservation laws in multiple dimensions, J. Comput. Phys. 74 (1988)1–24.
[3] Benson D, Computational methods in Lagrangian and Eulerian hydrocodes,Comput. Methods Appl. Mech. Eng. 99, 235 (1992).
[4] Berger MJ, Colella P. Local adaptive mesh refinement for shock hydrody- nam-ics. J. Comput. Phys., 82 1989.
[5] Berger MJ, Oligier J, Adaptive mesh refinement for hyperbolic partial differen-tial equations, J. Comput. Phys., 53 1984.
[6] Birkhoff G, MacDougall DP, Pugh EM, Taylor G, Explosives with lined cavities,J. App. Phys. 1948; 19.
[7] Borkowski K, Blondin J, McCray R, ApJ, 477, 281 (1997)
[8] Chi Chou P, Carleone J, Karpp RR, Criteria for jet formation from impingingshells and plates, J. App Phys. 1976; 47.
[9] Colella P, Multidimensional upwind methods for hyperbolic conservation laws,J. Comput. Phys. 87, 171 (1990).
[10] Colella P, Volume-of-fluid methods for partial differential equations, in GodunovMethods: Theory and Applications, edited by E. F. Toro (Kluwer, New York,2001), p. 161.
107
Bibliografía
[11] Colella P, Glaz HM, Efficient solution algorithms for the Riemann problem forreal gases, J. Comput. Phys. 59, 264 (1985).
[12] Colella P, Glaz HM, Ferguson RE, Multifluid Algorithms for Eulerian FiniteDifference Methods (1996).
[13] Colella P, Graves DT, Keen BJ, Modiano D, A Cartesian grid embedded bound-ary method for hyperbolic conservation laws, J. Comput. Phys. 211, 347-366(2006).
[14] Colella P, Graves DT, Modiano D, Serafini DB, Van Straalen B, Chombo Soft-ware Package for AMR Applications, Technical Report (Lawrence BerkeleyNational Laboratory, 2000), http://seesar.lbl. gov/anag/chombo/.
[15] Colella P, Sekora M, A limiter for PPM that preserves accuracy at smoothextrema. J. Comput. Phys. 227 (2008).
[16] Colella P, Woodward PR, The piecewise parabolic method (PPM) for gas dy-namical simulations, J. Comput. Phys. 54, 174 (1984).
[17] Cotelo M, Tesis doctoral 2014.
[18] Drake RP, et al, ApJ, 500, 157 (1998)
[19] Fedkiw RP, Aslam T, Merriman B, Osher S, A non-oscillatory Eulerian ap-proach to interfaces in multimaterial flows (The Ghost Fluid Method), J. Com-put. Phys. 152, 457-492 (1999).
[20] García-Senz D, Badenes C, Serichol N, Is there a hidden hole in type Ia super-nova remnants?, ApJ, 745, (2012)
[21] García de la Varga A, Tesis doctoral 2014
[22] Harlow FH, Pracht WE, Formation and penetration of high-speed collapse jets,Phys. of Fluids 1966; 9.
[23] Hirt CW, Nichols BD, Volume of fluid (VOF) method for the dynamics of freeboundaries, J. Comput. Phys. 39, 201 (1981).
[24] Kasperczuk A, Investigations of the cumulatively produced jets, Internal reportPALS 2008.
108
Bibliografía
[25] Lax P, Wendroff B, Systems of conservation laws, Comm. Pure Appl. Math.13 (1960).
[26] LeVeque RJ, Finite-Volume Methods for Hyperbolic Problems, Cambridge Uni-versity Press, Cambridge, 2002.
[27] LeVeque RJ, High-resolution conservative algorithms for advection in incom-pressible flow, SIAM J. Numer. Anal. 33 (2) (1996) 627–665.
[28] LeVeque RJ, Numerical Methods for Conservation Laws (Birkh�auser Verlag,Boston, 1992).
[29] Liovic P, Rudman M, Liow JL, Lakehal D, Kothe D. A 3D unsplit-advectionvolume tracking algorithm with planarity-preserving interface reconstruction.Computers & Fluids 2006; 35: 1011-1032.
[30] Liska R, Wendroff B. Comparison of several difference schemes on1D and 2D test problems for the Euler equations. http://www-troja.fjfi.cvut.cz/~liska/CompareEuler/compare8/
[31] López J, Hernández J, Gómez P, Faura F, A volume of fluid method basedon multidimensional advection and spline interface reconstruction. J. Comput.Phys 195 (2004).
[32] Loupais B et al, Supersonic-jet experiments using a high-energy laser, PRL 99(2007).
[33] Marietta E, Burrows A, Fryxell B, Type Ia Supernova Explosions in BinarySystems: The Impact on the Secondary Star and Its Consequences, ApJS, 128,616 (2000)
[34] McCorquodale P, Colella P. A high-order finite-volume method for conservationlaws on locally refined grids. Comm. App. Math. and Comp. Sci. 6 (2011).
[35] Miller GH, Colella P. A conservative three-dimensional Eulerian method forcoupled solid–fluid shock capturing. J Comput Phys 2002; 183:26–82.
[36] Miller GH, Puckett EG, A high-order Godunov method for multiple condensedphases, J. Comput. Phys. 128, 134 (1996).
109
Bibliografía
[37] Noh WF, Woodward PR, SLIC (Simple Line Interface Calculation), SpringerLecture Notes in Physics (Springer-Verlag, Berlin, 1976), Vol. 59.
[38] Oliva E, Tesis doctoral 2010.
[39] Ogando F, Tesis doctoral 2001.
[40] Pakmor R, Röpke FK, Weiss A, Hillebrandt W, A&A, 489, 943 (2008)
[41] Pember RB, Greenough JA, Colella P, An adaptive, higher-order Godunovmethod for gas dynamics in three-dimensional orthogonal curvilinear coordi-nates
[42] Pilliod Jr JE, Puckett EG. Second-order Volume-of-Fluid algorithms for track-ing material interfaces. Technical Report LBNL-40744, Lawrence Berkeley Na-tional Laboratory, 1997.
[43] Puckett EG, A volume-of-fluid interface tracking algorithm with applicationsto computing shock wave refraction, in: H. Dwyer (Ed.), Proceedings of theFourth International Symposium on Computational Fluid Dynamics, Davis,CA, 1991, pp. 933–938.
[44] Puckett EG, Saltzman JS, A 3D adaptive mesh refinement algorithm for mul-timaterial gas dynamics, Physica D 60, 84 (1992).
[45] Puckett EG, On the second-order accuracy of volume-of-fluid interface recon-struction algorithms: convergence in the max norm, CAMCoS (2010).
[46] Puckett EG, On the second-order accuracy of volume-of-fluid interface recon-struction algorithms II: An improved constraint on the cell size, CAMCoS(2010).
[47] Quirk JJ, Karni S, On the dynamics of a shock-bubble interaction, J. FluidMech. 318, 129 (1996).
[48] Rider WJ, Kothe DB, Reconstructing Volume Tracking. J. Comput. Phys. 141(1998).
[49] Robinson AC, Evaluation techniques and properties of an exact solution to asubsonic free surface jet flow, Technical report Sandia National Laboratories,2002.
110
Bibliografía
[50] Ryutov D, Drake RP, Kane J, Liang E, Remington BA, Wood-Vasey WM, ApJ,518, 821 (1999)
[51] Scardovelli R, Stephane Z, Analytical Relations Connecting Linear Interfacesand Volume Fractions in Rectangular Grids, J. Comput. Phys. 164, 228-237(2000).
[52] Scardovelli R, Zaleski S, Direct numerical simulation of free-surface and inter-facial flow, Annual review of fluid mechanics (C. Cambon and J. F. Scott, eds.),vol. 31, Annual Reviews, Palo Alto, CA, 1999.
[53] Sakagami H, Nishihara K, Phys. Rev. Lett. 65, 432 (1990)
[54] Sakai J, Masuda T, Sokolov I, Plasma jet formation by collision of two shockwaves and by collision of two magnetic flux tubes, J. Phys. Soc. Jpn 2004, 73.
[55] Saltzman J,An unsplit 3D upwind method for hyperbolic conservation laws, J.Comput. Phys. 115, 153 (1994).
[56] Shapiro AH, The dynamics and thermodynamics of compressible fluid flow,Ronald Press 1953.
[57] Sokolov IV, Hydrodynamic cumulative processes in plasma physics, Sov. Phys.Usp. 33 (1990).
[58] Sussman M, Almgren A, Bell J, Colella P, Howell L, Welcome M, An adaptivelevel set approach for incompressible two-phase flows, J. Comput. Phys. 148,81 (1999).
[59] Sussman M, Puckett EG. A coupled Level Set and Volume-of-Fluid methodfor computing 3D and axisymmetric incompressible twophase flows. J ComputPhys 2000;162:301–37.
[60] Sussman M, Smereka P, Osher S, A level set approach for computing solutionsto incompressible two-phase flow, J. Comput. Phys. 114, 146 (1994).
[61] Toro E, Riemann Solvers and Numerical Methods for Fluid Dynamics, Springer-Verlag, Berlin, Heidelberg, 1997.
[62] Trangenstein JA, Numerical solution of hyperbolic conservation laws.
111
Bibliografía
[63] Van Leer B, Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method, J. Comput. Phys. 32 (1979) 101–136.
[64] Velarde P, Ogando F, Eliezer S, Martinez-Val JM, Perlado JM, and MurakamiM, Comparison between jet collision and shell impact concepts for fast ignitionLaser Part. Beams 23, 43(2005)
[65] Velarde P, García-Senz D, Bravo E, Ogando F, Relaño A, García C, Oliva E,Phys. Plasma, 13, 092901 (2006)
[66] Walsh JM, Sireffler RG, Willig FJ, Limiting conditions for jet formation in highvelocity collisions, J. App. Phys. 1953; 24.
[67] Woodward PR, Colella P. The numerical solution of two-dimensional fluid flowwith strong shocks. J Comput Phys 1984;54:115–73.
[68] Woodward P, Piecewise-Parabolic Methods for astrophysical fluid dynaics, As-trophysical Radiation Hydrodynamics, editado por Winkler KHA, Norman ML,NATO ASI Series 1982.
[69] Kang YG, Nishihara K, Nishimura H, et al., Blast-wave–sphere interactionusing a laser-produced plasma: An experiment motivated by supernova 1987A,Phys. Rev E, 64, 046402 (2001)
[70] Youngs DL, Time dependent multi-material flow with large fluid distortion,Numerical Methods for Fluid Dynamics, Morton KW, Baines MJ, AcademicPress 1982.
[71] Zalesak ST, Fully multi-dimensional flux corrected transport algorithms forfluid flow, J. Comput. Phys. 31 (1979) 335–362.
[72] Zhang Q, Liu PLF, A new interface tracking method: The polygonal areamapping method. J. Comput. Phys. 227 (2008) 4063-4088.
112