MOTORES ASINCRONICOS PRINCIPIOS DE …frt.utn.edu.ar/tecnoweb/imagenes/file/Apuntes del Dpto...
30
UTN – FACULTAD REGIONAL TUCUMAN 1 /30 ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS MOTORES ASINCRONICOS PRINCIPIOS DE FUNCIONAMIENTO, CARACTERÍSTICAS, CLASIFICACIÓN, FUNCIONAMIENTO CON VELOCIDAD VARIABLE. 1) MOTORES DE JAULA DE ARDILLA. Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminales de línea, su estator desarrollará un par de arranque que hará que aumente la velocidad. Al aumentar la velocidad a partir del reposo (100% de deslizamiento) disminuye su deslizamiento y su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción. Los pares desarrollados al arranque y al valor de deslizamiento que produce el par máximo, en ambos exceden el par de la carga, por lo tanto la velocidad del motor aumentará hasta que el valor de deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor de equilibrio del deslizamiento, hasta que aumente o disminuya el par aplicado. La característica esencial que distingue a una máquina de inducción de los demás motores eléctricos es que las corrientes secundarias son creadas únicamente por inducción. Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creo tal variedad y adaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversas características de curva deslizamiento - par. Al dar la proporción correcta al devanado de doble jaula de ardilla, los fabricantes han desarrollado numerosas variaciones del diseño del rotor. Estas variaciones tienen por consecuencia par de arranque mayores o menores que el diseño normal y también menores corrientes de arranque. 2) PRINCIPIOS DE FUNCIONAMIENTO. Los motores asincrónicos o de inducción, por ser robustos y baratos, son los más extensamente empleados en la industria. En estos motores, el campo gira a la velocidad sincrónica, correspondiente a la frecuencia de la fuente de alimentación. p f nS = Teóricamente, para el motor girando en vacío y sin pérdidas, el rotor tendría la velocidad síncrona. Si al motor, se le aplica momento resistente en su eje, el rotor disminuirá su velocidad para que la velocidad relativa con el campo electromagnético giratorio, permita producir un campo electromagnético igual y opuesto al aplicado exteriormente. La velocidad del rotor se estabilizará en un punto de funcionamiento determinado por el equilibrio del momento motor y el resistente. La velocidad angular relativa (necesaria para que sea producido el momento electromagnético motor), expresada por unidad de la velocidad síncrónica; se llama: deslizamiento (pérdida de velocidad angular del rotor).
Transcript of MOTORES ASINCRONICOS PRINCIPIOS DE …frt.utn.edu.ar/tecnoweb/imagenes/file/Apuntes del Dpto...

UTN – FACULTAD REGIONAL TUCUMAN
1 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
MOTORES ASINCRONICOS
PRINCIPIOS DE FUNCIONAMIENTO, CARACTERÍSTICAS, CLASIFICACIÓN,FUNCIONAMIENTO CON VELOCIDAD VARIABLE.
1) MOTORES DE JAULA DE ARDILLA.
Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor deinducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminalesde línea, su estator desarrollará un par de arranque que hará que aumente la velocidad. Alaumentar la velocidad a partir del reposo (100% de deslizamiento) disminuye su deslizamientoy su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidadaumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par quedesarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor de deslizamiento que produce el par máximo, enambos exceden el par de la carga, por lo tanto la velocidad del motor aumentará hasta que elvalor de deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valorigual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor deequilibrio del deslizamiento, hasta que aumente o disminuya el par aplicado.
La característica esencial que distingue a una máquina de inducción de los demás motoreseléctricos es que las corrientes secundarias son creadas únicamente por inducción.
Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creo tal variedad yadaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversascaracterísticas de curva deslizamiento - par. Al dar la proporción correcta al devanado de doblejaula de ardilla, los fabricantes han desarrollado numerosas variaciones del diseño del rotor.
Estas variaciones tienen por consecuencia par de arranque mayores o menores que el diseñonormal y también menores corrientes de arranque.
2) PRINCIPIOS DE FUNCIONAMIENTO.
Los motores asincrónicos o de inducción, por ser robustos y baratos, son los másextensamente empleados en la industria. En estos motores, el campo gira a la velocidadsincrónica, correspondiente a la frecuencia de la fuente de alimentación.
pf
nS =
Teóricamente, para el motor girando en vacío y sin pérdidas, el rotor tendría la velocidadsíncrona. Si al motor, se le aplica momento resistente en su eje, el rotor disminuirá su velocidadpara que la velocidad relativa con el campo electromagnético giratorio, permita producir uncampo electromagnético igual y opuesto al aplicado exteriormente.
La velocidad del rotor se estabilizará en un punto de funcionamiento determinado por elequilibrio del momento motor y el resistente.
La velocidad angular relativa (necesaria para que sea producido el momento electromagnéticomotor), expresada por unidad de la velocidad síncrónica; se llama: deslizamiento (pérdida develocidad angular del rotor).

UTN – FACULTAD REGIONAL TUCUMAN
2 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
ωω−ω=−= s
s
s
nnns
s = deslizamienton = velocidad del rotorω velocidad angular del rotor
A menudo se prefiere indicar el deslizamiento en porcentaje de la velocidad sincrónica:
(%)100xn
nnss
s −=
Esta ecuación también puede expresarse en términos de velocidad angular (radianes porsegundo) como:
(%)100xss
s
ωω−ω=
Obsérvese que si el rotor gira a velocidad sincrónica s = 0, mientras que si el rotor está fijos =1. Todas las velocidades normales del motor, están en algún lugar entre estos dos límites.Es posible expresar la velocidad mecánica del eje del rotor, en términos de velocidadsincrónica y de deslizamiento. Resolviendo las ecuaciones anteriores para velocidad mecánicaresulta:
n)s1(n sm −= ω−=ω sm )s1(
Estas ecuaciones son útiles en la deducción del momento de torsión de los motores deinducción y de la relación de potencia.Normalmente el valor de s, en estado estacionario, seencuentra entre un 4 y un 8%.El momento motor electromagnético puede ser expresado por larelación:
ω=
s
gPC
Pg : es la potencia del campo electromagnético que gira a la velocidad angular ωs
P : es la potencia mecánica proporcionada mediante el eje, que gira a una velocidad ω
ω
= PC
Por lo tanto :
)s1(PPP gs
g −=ωω=
La potencia mecánica en el eje, es igual a la potencia en el entrehierro de la máquina Pg(potencia del campo giratorio), menos las pérdidas en el rotor.
Frecuencia eléctrica en el rotor
El motor de inducción trabaja induciendo voltajes y corrientes en el rotor de la máquina y poresa razón algunas veces se ha llamado transformador giratorio. A la manera de untransformador, el primario (estator) induce un voltaje en el secundario (rotor) a través del flujomagnético, pero a diferencia del transformador, la frecuencia secundaria no es necesariamentela misma frecuencia primaria.
Si el rotor del motor es bloqueado, de forma tal que no se pueda mover, entonces el rotor y elestator de la máquina estarán a la misma frecuencia. Por el contrario, si el rotor gira a la

UTN – FACULTAD REGIONAL TUCUMAN
3 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
velocidad sincrónica, la frecuencia del rotor será cero. En consecuencia para cualquiervelocidad, la frecuencia del rotor será función directa del deslizamiento, y de la frecuenciaeléctrica del estator. Lo anterior queda de manifiesto en la siguiente relación:
)Hz(fsf sr =
donde:fr = Frecuencia del rotor Hzfs = Frecuencia del estator Hzs= deslizamiento (%)
3) TRANSITORIO DE ARRANQUE DE MOTORES ASINCRONICOS
Una idea simplificada de una instalación eléctrica industrial es considerar una fuente de energía(frecuentemente la red pública) y un conjunto de cargas, muchos motores, y otras cargas.
Quien proyecta la instalación eléctrica debe alcanzar un objetivo, se trata de lograr un enlace,un vinculo entre fuente y cargas eficiente para alimentar y controlar las cargas.
Hoy la distribución de energía eléctrica se realiza respetando conceptos de calidad de servicioque tienden a mantener las características de la tensión de alimentación de las cargas(usuarios) dentro de niveles de tolerancia convenientes.
El arranque de un motor eléctrico, produce asociada a la corriente de arranque elevada lacorrespondiente caída de tensión, condiciones que persisten un tiempo mas o menos largosegún sea la carga que el motor debe acelerar.
Métodos de cálculo
Se puede pensar que el arranque de un motor pasa por una sucesión de estados defuncionamiento que inician con velocidad nula y acaban asintoticamente en un estado derégimen.
La expresión de la ley de Newton para movimiento giratorio es la ecuación que rige el
fenómeno de aceleración del motores:dtdJCC rmω=−
La característica de interés para el arranque del motor es Cm (par motor) en función de ω(velocidad angular), la maquina accionada ofrece una resistencia Cr (par resistente) tambiénfunción deω, el conjunto motor máquina accionada tiene un momento de inercia que se reduceal eje del motor J, teniendo en cuenta las relaciones de velocidades de las diferentes partes dela maquina accionada.
La resolución analítica de la ecuación diferencial que rige el fenómeno de aceleración no esposible porque Cm y Cr están generalmente representadas en gráficos o tablas, pero no porfunciones que puedan ser integradas con métodos analíticos.
Es lógico entonces resolver el problema con métodos numéricos con un programa de
computadora en base a la expresión: CC
Jtrm −
ω∆=∆

UTN – FACULTAD REGIONAL TUCUMAN
4 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Los gráficos de Cm y Cr en función de ω se dividen en pequeños intervalos: ωω 21 , , para cadaintervalo se determinan los valores medios deω, Cm y Cr, consecuentemente se calculan unasucesión de valores t∆ , y por suma se obtiene como crece t (el tiempo) en función de ω.
Con las hipótesis implícitas, se observa que la aceleración se puede calcular hasta que Cm =Cr, cuando el denominador tiende a cero el motor alcanza la velocidad de régimen.
A partir de la relación de ω con las otras variables se pueden construir otras funciones deltiempoCm par motorCr par antagónicoCm – Cr par acelerador
Generalmente asociada a Cm función de ω se conoce también I (corriente) función deω, sepuede representar entonces:I corriente en función del tiempo
Aceleración de la carga.
La ecuación que rige la aceleración de un cuerpo de inercia J, bajo la acción de un momentoacelerante C, es:
dtdJC ω=
El tiempo para que un cuerpo de inercia J sea acelerado desde la velocidad ω1 hasta lavelocidad ω2 , bajo al acción de un par C, puede ser expresado como:
∫ ω=∫ω2
1ω
t
0JdCdt
si suponemos que C es constante en el intervalo ( ω→ω 21 ), resulta:
( )ω−ω=∫ ω=ω
ω12C
JJdC1t
2
1
Las unidades son: J (Kg.m2), t (seg), C (N.m) y ω(rad/seg)
El par acelerante es numéricamente es el par motor menos todos los pares resistentes.J es la suma de todas las inercias involucradas, es decir, del rotor del motor, de la maquinaaccionada y de todos los acoplamientos.
Se usará la siguiente terminología.CM Par motor.CR Par resistente.CAC Par acelerante CAC= CM- CR
( )ω−ω= 12CJt . Se parte de la hipótesis de C constante en el intervalo considerado; como para
motores de inducción ( )ω∫=C , se deben tomar intervalos en la curva de la función que puedanadmitir un valor medio representativo o que se debe escoger en la función intervalos en que lamisma sea lineal.

UTN – FACULTAD REGIONAL TUCUMAN
5 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Ejemplo
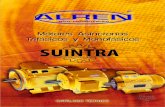
Un motor eléctrico trifásico de inducción de 100 CV, 4 polos, rotor de jaula, tiene una inerciapropia de 1,4 Kg. m2 , accionando un ventilador con momento de inercia de 101 kg m2 la figuraNº1 representa la curva: momento-velocidad de la carga y del motor. Calcular el tiempo que elsistema necesitará desde el reposo, hasta la velocidad de régimen.Como la escala de los momentos esta expresada en valores porcentuales del par básico:
m.N390
602.1800
736.100Cb =
π=
Figura: Nº 1
El tiempo en cada intervalo “i” está dado por:
C.J
tCA
ii
1
ω∆=∆
Se debe señalar que debido a que es un método gráfico tiene una imprecisión inherente, perotambién las curvas están dadas con un error, y una integración gráfica no afecta los resultados.La tabla Nº 1 resume los resultados del cálculo.
(rpm) (rpm) (% Cb) (% Cb) (% Cb) (N.m) . ω∆ Tiempo (seg)400 400 167 136 151,5 591 42 7600 200 135 127 131 511 21 4800 200 127 127 127 495 21 4
1200 400 127 137 132 515 42 81400 200 137 135 136 530 21 41600 200 135 100 117 456 21 51700 100 100 60 80 312 10 31745 45 60 12 36 140 5 3
40
Tabla Nº 1
50
Mom
ento
400
800
1200
1600
2000
Velocidad (rpm)
Par resistente.
Par motor.
Par acelerante
n2n1
100
150
200
250

UTN – FACULTAD REGIONAL TUCUMAN
6 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Momento de inercia.
El momento de inercia de un cuerpo con respecto a un eje esta dado por:
∫=r
0
2 dmrJ
Considerando el caso particular de un cilindro macizo, de radio r, densidad ρ y altura h:
2rM
2r)h..r.(
4r.h..2dr.r.h..2dr.2.h..rJ
222
4r
0
3r
0
2 =ρπ=ρπ=∫ρπ=πρ∫=
donde M es la masa del cilindro y r el radio del mismo.
La segunda Ley de Newton puede ser expresada por:
a.MF = ∴ a.gPF =
De esta forma:
1N= 1Kg . 1 m/seg2 (MKS)
981,0Kgf1N1 =
segm1
seg/m8,9Kgf1N1 22=
Así, el momento de inercia puede ser expresado en unidades métricas por:
(J) = (N).(m).(seg2 ) = (Kg) (m)2
= (Kgf) .(m).(seg)2
Momento de inercia práctico:
GD2 : donde G se lo asume como un peso(no como masa) y D es el diámetro de giro odiámetro de inercia.
2dD = y GD2 = 4 J
Momento de inercia de una masa en trasladación, referido a un eje.
En el caso, por ejemplo, de un motor que iza una masa dada, la misma es para el motor unmomento de inercia, por el principio de conservación de la energía:
2J2v.mE
2m
mtr
2
cineticaω==
v es la velocidad lineal de la masa.

UTN – FACULTAD REGIONAL TUCUMAN
7 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
M es la masa de izamiento.ωm es la velocidad angular del eje del motorJmtr es el momento de inercia de la masa en traslación referida al eje del motor. De esta forma:
ω= 2
m
2
mv.m
J
Cadena cinemática
Cuando un motor eléctrico acciona una carga por medio de un sistema de transmisiónconstituido por engranajes, poleas, correas y similares, la formulación de las ecuaciones queexpresan el comportamiento del sistema exige que los conjuntos integrantes de la cadena,sean referidos a un único eje. Usualmente el eje escogido es el propio eje del motor.
Figura Nº 2
Para el accionamiento, cuyo esquema esta dado en la figura Nº 2:
ω=ηω ccmm CCdonde:Cm es el par desarrollado por el motorωm es la velocidad angular o de rotación del motorη es el rendimiento de lo transmisión.Cc es el par resistente o de la cargaSiendo “z” la relación de transmisión, se tiene:
ωω=
c
mz
η=
ηωω=
zCCC c
m
ccm
Cuando se tiene una cadena con varios eslabones de transmisión:
ηηηη=η n321 .....z........zzzz n321=
Recurrimos a la invariabilidad de la energía cinética, para trasladar los momentos de inercia aotro eje.
ωm
η ωC

UTN – FACULTAD REGIONAL TUCUMAN
8 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Por ejemplo para un sistema similar al de la figura Nº 3
2J.........2J2J2J
2n
n
21
1
2m
m
2m
toalω++ω+ω=ω
ωω++
ωω+
ωω+=
2m
2n
n2m
22
22m
21
1mtotal J.......JJJJ
z......zzJ.....
zzJ
zJJJ 2
n22
21
n22
21
221
1mtotal ++++=
Figura Nº3
Ejemplo
Un motor eléctrico acciona por medio de un transmisión de engranajes el tambor de uncabrestante para levanta cargas, con un diámetro de 400mm.El mecanismo debe levantar un peso de 20.0000 N a la velocidad de 0.5 m/seg, empleandopara levantar la carga (desde el punto inicial al final) 0,9 seg .
ω ω ω ω

UTN – FACULTAD REGIONAL TUCUMAN
9 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Figura Nº4
Sistema de transmisión. Ejemplo de cálculo del par motor necesario para levantar la carga enun tiempo dado.
Son datos:Jrotor = 0,275 Kg.m2 (Jm)Jacoplamiento = 0,075 Kg.m2 (Jac)Jtambor = 0,275 Kg.m2 (Jtamb)Jengranaje “a” = 0.050 Kg.m2 (Ja)Jengranaje “b” = 0.525 Kg.m2 (Jb)Jengranaje “c” = 0.159 Kg.m2 (Jc)Jengranaje “d” = 1,375 Kg.m2 (Jd)
Luego las relaciones de transmisión son:
6eez
b
a1 ==
10eez
d
c2 ==
y los rendimientos de las transmisiones son 95,021 =η=η y la velocidad del motor es de 1730rpm.
Admitiendo que la velocidad de la carga es constante, calcular el momento a desarrollar por elmotor para levantarla.
El par resistente debido al movimiento de traslación de la carga es:
zC
C aargcmotoraargc η
=−
Nm40002/4,0*200002dGC aargc ===
9025,095,0*95,021 ==ηη=η6010*6zzz 21 ===

UTN – FACULTAD REGIONAL TUCUMAN
10 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Nm9,7360*925,0
4000C motoraargc ==−
El momento de inercia total del sistema, referido al eje del motor, Jtotal será:
zzJ
zzJ
zJ
zJJJJvm
J 22
21
tamb22
21
d21
c21
bcaacm2
m
2
total +++++++ω
=
m.Kg435,000007,000038,0004,00146,005,0075,0275,02,181
5,0*2040J 2
2
2
total =+++++++=
Admitiendo aceleración uniforme, tendremos:
tJ
dtdJC m
naceleracióω=ω=
Nm5,879,02,181*435,0C naceleració ==
y el par que el motor deberá desarrollar para atender los requisitos de este accionamiento seráde:
CCC aceleracióamotorargcm +=Nm4,1615.879,73Cm =+=
4) DIAGRAMA CIRCULAR.
Figura Nº5La figura muestra el diagrama vectorial de las componentes de corrientes del motorasincrónico.
Iµ Corriente de magnetización.IP Componente activa de la corriente de vacíoI0 Corriente de vacío.

UTN – FACULTAD REGIONAL TUCUMAN
11 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
La corriente absorbida de la fuente de la fuente de alimentación es la suma vectorial:III 0
'21 +=
En la figura, están representadas las f.e.m. E1 inducida en el estator y E´2 f.e.m. inducida en elrotor referida al estator.
Ellas sirven de referencia para el diagrama de corrientes, considerando que su vector debeestar adelantado 90º eléctricos con relación a la corriente de magnetización. También,considerando que las caídas internas en el estator son pequeñas, pueden dar una posiciónaproximada del vector de la tensión aplicada: U
Cuando la carga aplicada al motor varía, la componente de corriente del rotor I´2 también lohace por ser proporcional al momento.
Io permanece constante ya que es la corriente de magnetización del motor.
El lugar geométrico de la punta del vector que representa a I1, corriente absorbida por elestator, es un circunferencia, tal como se ve en la figura Nº 2.
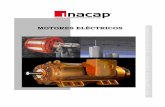
Figura Nº 6
A medida que el momento resistente en el eje del motor crece, el punto P se desplaza sobre lacircunferencia. El deslizamiento mayor corresponde al punto Pb ( S = 1), que corresponde a lacondición de rotor bloqueado.
La corriente para rotor bloqueado, absorbida por el estator es O´Pb y la del rotor es OPb .
La semirecta O´Pb es usualmente llamada recta de las potencias.
El segmento PG, es igual a ϕ1cosI1 y es proporcional a la potencia por fase
ϕ= 1cosI1UP absorbida por la I1 .
II'2
1
Pb ( S = 1)
P
E
DG
0I
ϕ1
ϕο
M
CA
I
oo´
≅ U

UTN – FACULTAD REGIONAL TUCUMAN
12 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
El segmento DG, igual a ϕ00 cosI , es proporcional a las pérdidas en vacío del motor.El segmento ED, representa las pérdidas de Joule.
Entonces PE, el segmento comprendido entre la circunferencia y la recta de potencias, esproporcional a la potencia mecánica transmitida al eje.
En el punto Pb , toda la potencia absorbida por el motor, con excepción de la pérdida en elhierro, está siendo convertida en calor a través de las pérdidas de Joule en los circuitos delestator y del rotor (segmento Pb C). Dividiendo este segmento en dos: Pb M proporcional a lapérdidas en el rotor y MC proporcional a las pérdidas por Joule en el estator.
La semirecta OM es, denominada “recta de momentos”. De hecho , los segmentoscomprendidos entre la circunferencia y la recta de los momentos, son proporcionales al parelectromagnético.
De esta manera, el segmento Pb M es proporcional al par de arranque del motor.
Al traza r una recta tangente a la circunferencia, paralela a la recta de las potencias, sedetermina el segmento JK proporcional a la máxima potencia que el motor puede proporcionar.
Figura Nº 7
De manera semejante, el segmento LN representa el máximo momento que el eje pudetrasmitir a la carga. Es interesante destacar que estos dos máximos se dan a distintasvelocidades.
Diagrama circular simplificado.
Datos suministrados por el catálogo de los fabricantes de motores:
II'
U
2
1
Pb
P
0I
ϕ1
ϕ0
M
CA
I
oo´
Recta de las potencias
N
LJ
K
Pm
ax
Cm
ax

UTN – FACULTAD REGIONAL TUCUMAN
13 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Pn Potencia nominal [Kw]Un Tensión nominal [V]In Corriente nominal [A]Cn Momento nominal [Kgm]ωn Velocidad angular nominal [1/seg.]
ϕcos n
ηn Rendimiento nominal
CC
n
max Relación de momento máximo al nominal.
CC
n
arr Relación de momento de arranque al nominal.
II
n
arr Relación de corriente de arranque a nominal.
Trazamos en una escala arbitraria, desde el origen de ejes de coordenadas, la corriente In conun ángulo. El extremo P del vectorωn , es el punto de funcionamiento nominal del motor delmotor.
Al definir la escala de corrientes, queda definida el momento nominal por la distancia desde elpunto P al eje de las abscisas.
Con la relación Cmax/Cn, obtenemos Cmax , trazamos una circunferencia con centro en el punto Py radio Cmax , la intersección con el eje de las absisas, determina el punto B que es el centro delcírculo del diagrama circular simplificado.
Para medir el resbalamiento de cada uno de los estados de funcionamiento, procedemos de lasiguiente forma:
Se une P con C. Perpendicularmente al eje de las absisas y perpendicular a esta, se traza unasemirecta con origen arbitrario (punto D), que intercepta al segmento PC en el punto E.
El segmento DE es representativo del resbalamiento nominal. Conociendo el resbalamientonominal podemos determinar la escala.
Todos los segmentos trazados entre C y cualquier punto de funcionamiento sobre lacircunferencia, determinan en la semirecta con origen en E, el resbalamiento correspondiente,leido en la escala definida.
Se destaca que la validez del diagrama circular simplificado, es hasta el punto defuncionamiento correspondiente a la momento máximo.
Si trazáramos en el diagrama el vector correspondiente a la corriente de arranque, secomprobaría que su extremo, no se encuentra sobre la circunferencia de funcionamiento.El vector de la corriente de arranque puede trazarse sin dificultad, dado que en el catálogopodemos encontrar el módulo de Iarr; y su ordenada es Carr .

UTN – FACULTAD REGIONAL TUCUMAN
14 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Figura Nº 8
5) CIRCUITO EQUIVALENTE DEL MOTOR DE INDUCCIÓN
Para determinar el circuito equivalente de la Máquina de Inducción se deben hacer lassiguientes consideraciones:
• La diferencia entre la tensión aplicada a las fases del estator y la tensión inducida enéstas por el flujo resultante en el entrehierro, es igual a la suma de las caídas de tensiónen la resistencia y en las reactancias de dispersión de los devanados del estator(situación idéntica a la del transformador).
• La corriente magnetizante requerida para producir el flujo del entrehierro es proporcionala este último (en ausencia de saturación) y por lo tanto a la tensión que induce.
• Las pérdidas en el hierro las podemos considerar (sin gran error) como proporcionalesal cuadrado de la inducción máxima en el entrehierro, es decir, proporcionales alcuadrado de la tensión inducida.
Figura Nº 9Donde:

UTN – FACULTAD REGIONAL TUCUMAN
15 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
R1 :Resistencia por fase del estator ( Ω )R2 :Resistencia por fase del rotor, referido al estator ( Ω )X1 :Reactancia de dispersión del bobinado de estator ( Ω )X2 :Reactancia de dispersión del bobinado de rotor, referido al estator ( Ω )Rc :Resistencia de pérdida en el núcleo ( Ω )Xm :Reactancia de magnetización ( Ω )S :Deslizamiento (%)Vf :Voltaje de fase (v)E1 :Voltaje inducido por fase (v)I1 :Corriente de estator (A)Im :Corriente de magnetización (A)I2 :Corriente de rotor, referida al estator (A)
6) POTENCIA Y MOMENTO DESARROLLADO
Figura Nº 10
La corriente del rotor, I2 y la corriente del estator I1,pueden determinarse a partir del modelo dela Figura 9, donde R2 y X2 están referidos a los bobinados del estator. Una vez conocidos losvalores de I1 y de I2, los parámetros de rendimiento de un motor trifásico pueden determinarsecomo sigue:
Pérdida en el cobre del estator: RI3P 1211cu =
Pérdidas en el cobre del rotor: RI3P 2222cu =
Pérdidas en el núcleo: RE3
RU3 P
21
c
2f
fe
c≈=

UTN – FACULTAD REGIONAL TUCUMAN
16 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Potencia en el entrehierro Pg (potencia que pasa al rotor a través del entrehierro) :
sRI3 P
22 2
g =
La potencia de entrada es: gsuef1fi P P P cos I V 3 P ++==
La potencia desarrollada: s) -(1sRI3 P - P P
22 2
cu2gd ==
El par motor desarrollado:
ω==−−
==s
22 2
S
ggd 1sRI3ω
P)sω(1s)(1P
ωPC
La potencia de entrada:
La potencia de salida es : P0 = Pd – P sin carga
PPPPP
PP
g
d
cu1fe
cargasin d
i
η++
+==
El rendimiento si ( )PPP cu1feg +>> y PP sincargad >> , se convierte aproximadamente en:
s)(1P
s)(1PPP
g
g
i
0η −=−
==
Cuando se necesita hacer resaltar las relaciones de momento y potencia, y a fin de simplificarlos cálculos se propone el circuito equivalente simplificado. Como normalmente Rm es muchomás grande que Xm, y Xm >> (R1+X1), entonces Vf es aproximadamente igual a E1, luego elcircuito simplificado es el siguiente Figura Nº 11:
Figura Nº 11La impedancia de entrada del motor es:
gcu1fem1fi P P P cos I V 3 P ++=ϕ=

UTN – FACULTAD REGIONAL TUCUMAN
17 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
( )
( )XXXjsRR
sRRXjXXX
Z21m
21
21m21m
i++++
+++−=
De la figura Nº 11, la corriente rms del motor:
( )2/1
221
221
f2
XXs
RR
VI
++
+
=
La ecuación del par motor será:
( )
++
+ω
=2
21
22
1S
d
XXsRRS
VR3C2f2
El par de arranque del motor puede determinarse, para 0m =ω , y s=1
( ) ( )[ ]221
221S
S
XXRR
VR3C
2f2
+++ω=
El deslizamiento par el cual se produce el par máximo puede calcularse para la condición:
0dsCd d = ,
( )( ) 2/1221
21
2m
XXRRs++
−+=
Curvas características del motor de inducción.
Figura Nº 12
Sustituyendo el valor de Sm en Td obtenemos el par motor máximo que puede desarrollar:

UTN – FACULTAD REGIONAL TUCUMAN
18 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
( )[ ]221
211s
2f
mm
XXRR2
VC+++ω
=
Si se considera que Rs es pequeña en comparación con otras impedancias del circuito, cosaque por lo común resulta una aproximación válida en motores de más de 1Kw, las expresionesse convierten en:
( )
++
ω=
221
22
S
d
XXSRs
VR3C2f2
( ) ( )[ ]221
22S
S
XXR
VR3C
2f2
++ω=
XXRs
21
2m +
=
( )XX2V3
C21b
2f
mm +ω=
Figura Nº 13

UTN – FACULTAD REGIONAL TUCUMAN
19 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Curva característica del momento motor.
Si el motor está alimentado a partir de una tensión fija a una frecuencia constante, el momentodesarrollado por el motor es una función del deslizamiento. En consecuencia la relaciónmomento velocidad pueden determinarse a partir de la ecuación Td= f (s) y se obtiene unacurva como la que se muestra a continuación Figura Nº 14.
Figura Nº 14
Existen tres regiones de operación:
Funcionamiento como motor, (0< s< 1):El motor gira en la misma dirección que el campo. Una vez que el momento alcanza su nivelmáximo, éste se reduce con el aumento del deslizamiento debido a una reducción del flujo enel entrehierro.
Generación, (s< 0):
La velocidad del rotor es mayor que la velocidad sincrónica en igual dirección y con undeslizamiento negativo. Por lo que la potencia es devuelta al circuito de estator y el circuitoopera como generador.
Operación en sentido contrario ( freno), (s >1):
La velocidad del motor tiene sentido contrario a la dirección del campo, y el deslizamiento esmayor que la unidad.
7) ACCIONAMIENTOS
El objetivo básico del accionamiento eléctrico es llegar al punto de equilibrio dado por el puntode intersección de las curvas momento-velocidad del motor y la carga.
El punto de equilibrio se caracteriza por la ausencia de dinámica, esto es, se está en presenciade un funcionamiento en régimen permanente y se cumple que:
Momento motor = Momento carga

UTN – FACULTAD REGIONAL TUCUMAN
20 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Definición: Accionamiento es el conjunto de dispositivos de alimentación, maniobra y controlque permiten satisfacer los requerimientos de funcionamiento de una carga.
Figura Nº 15
Funcionamiento inestable.
Consideremos un accionamiento operando en el punto de equilibrio (punto de operación) comose muestra en la figura supongamos un cambio de velocidad n1, entonces el momento de lacarga es mayor que el momento del motor por lo que este último sufre una desaceleración,alejándose del punto de equilibrio. Por otro lado, si existe un cambio de velocidad n2, entoncesel momento de carga es menor que el momento del motor, sufriendo éste una aceleración,alejándose del punto de equilibrio.
Por lo tanto, en este caso al existir variaciones de velocidad en el punto de operación delaccionamiento, este se aleja del punto de equilibrio conformándose un sistema inestable.
Luego, la condición de inestabilidad del accionamiento queda definida por: ω
<ω d
CddCd rm
Figura Nº 16
Funcionamiento estable.Consideremos un accionamiento operando en el punto de equilibrio (punto de operación) comose muestra en las curvas momento-velocidad de la carga y el motor. Si existe un cambio de
C
n1n2
Cm
Cr

UTN – FACULTAD REGIONAL TUCUMAN
21 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
velocidad n1, entonces el momento del motor es mayor que el momento de la carga por lo quese produce la aceleración del motor, retornando al punto de equilibrio. Por otro lado, frente a uncambio de velocidad n2, el momento de carga es mayor que el Momento del motor, por lo queeste último experimenta una desaceleración, retornando al punto de equilibrio.
Por lo tanto, en este caso al existir variación de velocidad en el punto de operación delaccionamiento, este trata de retornar al punto de equilibrio conformándose un sistema estable.
Luego, la condición de estabilidad del accionamiento queda definida por: ω
>ω d
CddCd rm
Figura Nº 17
A medida que aumenta la carga, la velocidad del motor disminuye. El Momento motor debeincrementarse para satisfacer los requerimientos del dispositivo accionado. Luego, la mayorcarga a la que se pueda trabajar quedará definida por el Momento máximo desarrollado por elmotor (estabilidad). Para una carga aún mayor, el motor no es capaz de satisfacer susrequerimientos por lo que se desacelera hasta llegar al estado del reposo (inestabilidad)
8) CLASIFICACIÓN DE LOS MOTORES
Para distinguir entre diversos tipos disponibles, la National Eléctrical Manufacturers Association(NEMA) ha desarrollado un sistema de identificación con letras en la cual cada tipo de motorcomercial de inducción de jaula de ardilla se fabrica de acuerdo con determinada norma dediseño y se coloca en determinada clase, identificada con una letra. Las propiedades de laconstrucción eléctrica y mecánica el rotor, en las cinco clases NEMA de motores de inducciónde jaula de ardilla, se resume en la tabla Nº 2:
C
Cm
Cr
nn2n1

UTN – FACULTAD REGIONAL TUCUMAN
22 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Tabla 2 características de los motores comerciales de inducción de jaula de ardilla deacuerdo con la clasificación en letras NEMA.
Clase
NEMA
Par de arranque
Carr/Cn
Corriente de
Arranque
Regulación de
Velocidad (%)
Nombre de clase del motor
A
B
C
D
F
1.5-1.75
1.4-1.6
2-2.5
2.5-3.0
1.25
5-7
4.5-5
3.5-5
3-8
2-4
2-4
3.5
4-5
5-8 , 8-13
mayor de 5
Normal
De propósito general
De doble jaula alto par
De alto par alta resistencia
De doble jaula, bajo par y
baja corriente de arranque.
*Los voltajes citados son para el voltaje nominal en el arranque.
Figura Nº 18CLASIFICACIÓN NEMA.
Los motores trifásicos de potencias mayores de 1 HP son clasificados por las normasNEMA, según el diseño de la jaula del rotor de la siguiente manera:
Motor de diseño NEMA A
Momento alto, deslizamiento nominal bajo y corriente de arranque alta.
Es un motor de inducción con rotor tipo jaula de ardilla, diseñado con características demomento y corriente de arranque que exceden los valores correspondientes al diseñoNEMA B, son usados para aplicaciones especiales donde se requiere un Momentomáximo mayor que el normal, para satisfacer los requerimientos de sobrecargas decorta duración.

UTN – FACULTAD REGIONAL TUCUMAN
23 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Estos motores también son aplicados a cargas que requieren deslizamientos nominalesmuy bajos y del orden del 1% o menos (velocidades casi constantes).
Motor de diseño NEMA B
Momento normal, corriente de arranque normal y deslizamiento nominal normal.
Son motores con rotor tipo jaula de ardilla diseñados con características de momento ycorriente de arranque normales, así como un bajo deslizamiento de carga deaproximadamente 4% como máximo. En general es el motor típico dentro del rango de1 a 125 HP. El deslizamiento a plena carga es de aproximadamente 3%.
Este tipo de motor proporcionará un arranque y una aceleración suave para la mayoríade las cargas y también puede resistir temporalmente picos elevados de carga sindetenerse.
Motor de diseño NEMA C
Momento alto, deslizamiento nominal normal, corriente de arranque normal. Sonmotores de inducción con rotor de doble jaula de ardilla, que desarrollan un altomomento de arranque y por ello son utilizados para cargas de arranque pesado. Estosmotores tienen un deslizamiento nominal menor que el 5%.
Motor de diseño NEMA D
Momento alto, alto deslizamiento nominal, baja corriente de arranque.
Este motor combina un alto momento de arranque con un alto deslizamiento nominal.Generalmente se presentan dos tipos de diseño, uno con deslizamiento nominal de 5 a8% y otro con deslizamiento nominal de 8 a 13%. Cuando el deslizamiento nominalpuede ser mayor del 13%, se les denomina motores de alto deslizamiento o muy altodeslizamiento (ULTRA HIGH SLIP). El momento de arranque es generalmente de 2 a 3veces el par nominal aunque para aplicaciones especiales puede ser más alto. Estosmotores son recomendados para cargas cíclicas y para cargas de corta duración confrecuentes arranques y paradas.
Motores de diseño NEMA F
Momento de arranque bajo, corriente de arranque baja, bajo deslizamiento nominal.
Son motores poco usados, destinándose a cargas con frecuentes arranques. Puedenser de altos Momentos y se utiliza en casos en los que es importante limitar la corrientede arranque.Otras Clasifícaciones.
Para casos especiales en que se necesitan características especiales que no seencuentran en la clasificación NEMA, tenemos los siguientes tipos de motor:Motores con rotor de jaula para mecanismos elevadores
En el servicio de los mecanismos elevadores, raras veces los motores funcionandurante largo tiempo a plena velocidad de rotación. No tiene por tanto, granimportancia que exista una elevada pérdida de velocidad (deslizamiento elevado).Debido a ello, es posible fabricar los motores con una capacidad de deslizamientomáximo mayor. De esta manera resulta un arranque elástico.

UTN – FACULTAD REGIONAL TUCUMAN
24 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Para el servicio de los mecanismos elevadores, los motores con rotor dejaula seconstruyen con capacidad de entrega de Momento de las clases KL 13h y KL 16h esdecir, que el motor puede arrancar con seguridad venciendo un par resistente del 130%o del 160% del par nominal. La letra "h" indica que el curso de la característica del parmotor se ha adaptado a las condiciones particulares del servicio de ésta clase demecanismos.
Por ejemplo, con una duración de conexión del 40%, estos motores, en lo que afecta ala potencia, ofrecen un par de arranque doble o triple del normal y una intensidad dearranque aproximadamente cuatro o cinco veces mayor que la normal. En este caso, elpar de arranque es el par máximo que puede presentarse en la gama comprendidaentre el estado de reposo y la velocidad de rotación nominal.
Motores con rotor de jaula para accionamiento de prensas.
Para accionar prensas con grados de inercia elevados, se utilizan frecuentementemotores provistos de rotores llamados de deslizamiento o de resistencia. Estosmotores tienen una capacidad aproximadamente a sólo el 80% de la potencia nominalnormal, y presentan un deslizamiento igual al doble de lo normal.
La clasificación del Momento es, por ejemplo, KLI OS (rotor de deslizamiento). Losmotores tienen un Momento de arranque de 1,7 veces el Momento nominal(aproximadamente) y absorben una intensidad inicial en el arranque que es igual aunas cuatro veces la intensidad nominal.
Motores de muy alto deslizamiento para unidades de bombeo de petróleo.
El motor de muy alto deslizamiento está específicamente diseñado para impulsarunidades de bombeo de petróleo tipo balancín por varilla de succión.
Este es un motor asíncrono trifásico de rotor bobinado; sus características eléctricas ymecánicas son diseñadas para tener un óptimo comportamiento, libre de fallas, en elduro trabajo de los campos petroleros. Poseen características que los hacen superioresa los motores con diseño NEMA D y con deslizamientos nominales del 5 al 8%.
Considerando las características particulares, como el funcionamiento y la instalación ala intemperie en zonas polvorientas, con lluvia y alta humedad relativa, etc., dondedeben funcionar durante largo tiempo casi sin mantenimiento, estos motores seconstruyen completamente cerrados y con ventilación externa. La clase de protecciónde IP 45 o IP 55 y el aislamiento es de clase F.
Los motores de muy alto deslizamiento, comúnmente disponen de 9 terminales, lo quepermite conectar el motor en cualquiera de las cuatro modalidades de momento: alto,medio, medio-bajo y bajo; para una óptima utilización de la capacidad y para facilitar elesfuerzo operacional en la unidad de bombeo. Se fabrican con momentos de arranquepromedio 330, 230, 200 y 180% del nominal para sus modalidades de alto, medio,medio-bajo y bajo torque, respectivamente. Mientras que los motores convencionalesse fabrican con momentos promedio de 200 % del nominal. Si en el motor convencionalla demanda de momento excede este nivel, el motor arrancará y se frenará. Locontrario sucede en el motor de muy alto deslizamiento, que, con el aumento de lademanda de momento disminuirá su velocidad a medida que la demanda de momentoaumenta. Los motores de muy alto deslizamiento presentan, respecto a los del diseñoNEMA D una enorme ventaja: la corriente de arranque es mucho más baja,aproximadamente la mitad, lo que significa caídas de tensión en los bornes del motor

UTN – FACULTAD REGIONAL TUCUMAN
25 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
mucho menores, consecuencia sumamente importante para un arranque satisfactorio,pues el momento del motor, como ya se ha visto, varía en forma proporcional con elcuadrado de la tensión en los bornes.
Clasificación de los motores de inducción de jaula de ardilla de acuerdo con elenfriamiento y el ambiente de trabajo.
Los motores comerciales de inducción de jaula de ardilla, y en general todos lo motoreseléctricos, se pueden clasificar también de acuerdo con el ambiente en que funcionan, sítambién como en los métodos de enfriamiento.
La temperatura ambiente juega un papel importante en la capacidad y selección deltamaño de armazón para una dínamo, parte importante del motivo es que la temperaturaambiente influye en la elevación permisible de temperatura por sobre los 40º C normales.Por ejemplo una dínamo que trabaje a una temperatura ambiente de 75º C empleandoaislamiento clase B tiene un aumento permisible de temperatura de tan solo 55º C. Sitrabajara a su temperatura ambiente normal de 40 º C se podría permitir un aumento detemperatura de 90º C, sin dañar su aislamiento.
También se hizo notar que la hermeticidad de la máquina afecta a su capacidad. Unamáquina con una armazón totalmente abierta con un ventilador interno en su eje, permiteun fácil paso de aire succionado y arrojado. Esta caja origina una temperatura final detrabajo en los devanados, menor en comparación que la de una máquina totalmentecerrada que evita el intercambio de aire con el exterior.
Esto da como resultado que existe una clasificación de los motores por el tipo de carcaza.
Tipos de envolventes o carcazas.
La NEMA reconoce los siguientes:
Carcaza a prueba de agua. Envolvente totalmente cerrada para impedir que entre aguaaplicada en forma de un chorro o manguera, al recipiente de aceite y con medios de drenaragua al interior.
Carcaza a prueba de ignición de polvos. Envolvente totalmente cerrada diseñada yfabricada para evitar que entren cantidades de polvo que se puedan encender o afectardesempeño y capacidad.
Carcaza a prueba de explosión. Envolvente totalmente cerrada diseñada y construida pararesistir una explosión de un determinado gas o vapor que pueda estar dentro de un motor,y también para evitar la ignición de determinado gas o vapor que lo rodee, debido achispas o llamaradas en su interior.
Carcaza totalmente cerrada envolvente que evita el intercambio de aire entre el interior y elexterior de ella pero que no es lo suficiente mente cerrada para poderla considerarhermética al aire.
Carcaza protegida al temporal. Envolvente abierta cuyos conductos de ventilación estándiseñados para reducir al mínimo la entrada de lluvia o nieve y partículas suspendidas enel aire, y el acceso de estas en las partes eléctricas.

UTN – FACULTAD REGIONAL TUCUMAN
26 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Carcaza protegida. Envolvente abierta en la cual todas las aberturas conducendirectamente a partes vivas o giratorias, exceptuando los ejes lisos del motor, tienentamaño limitado mediante el diseño de partes estructurales o parrillas coladeras o metaldesplegado etc. Par< evitar el contacto accidental con las parte vivas
Carcaza a prueba de salpicaduras. Envolvente abierta en la que las aberturas deventilación están fabricadas de tal modo que si caen partículas de sólidos o gotas delíquidos a cualquier ángulo no mayor de 100º con la vertical no puedan entrar en formadirecta o por choque de flujo por una superficie horizontal o inclinada hacia adentro.
Carcaza a prueba de goteo envolvente abierta en que las aberturas de ventilación seconstruye de tal modo que si caen partículas sólidas o gotas de líquido a cualquier ángulono mayor de 15º con la vertical no pueda entrar ya sea en forma directa o por choque yflujo por una superficie horizontal o inclinada hacia adentro.
Carcaza abierta envolvente que tiene agujeros de ventilación que permiten el flujo de aireexterno de enfriamiento sobre y alrededor de los devanados de la máquina.
El costo y el tamaño de los motores totalmente cerrados es mayor que el de los motoresabiertos, de la misma potencia y ciclo de trabajo y elevación sobre la temperaturaambiente.
9) FUNCIONAMIENTO CON VELOCIDAD VARIABLE
Característica C/s con tensión de alimentación variable
Recordando la expresión para el momento motor:
( )
++
+ω
=2
21
22
1S
d
XXsRRS
VR3C2f2
La ecuación indica que el par motor es proporcional al cuadrado de la tensión de alimentacióndel estator y una reducción de la tensión produciría una reducción de la velocidad.Consideremos que la tensión se reduce en un factor 1b ≤
( )
++
+ω
=2
21
22
1S
)d
XXsRRS
bV(R3C
2
f2

UTN – FACULTAD REGIONAL TUCUMAN
27 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Figura Nº 19
La figura Nº 19 muestra las características típicas par motor- velocidad para algunos valores deb. Los puntos de intersección con la línea de carga definen los puntos de operación estable. Encualquier circuito magnético, el voltage inducido es proporcional al flujo y a la frecuencia, y elflujo rms del entrehierro se puede expresar como:
ωφ== KVbV mfa
ω
=ω
=φK
VbKV
m
f
m
a
donde Km es una constante que depende del número de espiras del estator. Conforme elvoltaje del estator se reduce, el flujo en el entrehierro y el par motor se reducen también. Elrango de control de velocidad depende del deslizamiento sm , correspondiente al par máximo.Para motores de bajo deslizamiento, el rango de velocidades es muy angosto. Este tipo decontrol no es adecuado para una carga de momento resistente constante y por lo general seusan en aplicaciones que requieren un par motor de arranque bajo y un rango de variación develocidad pequeña.
Característica C/s con frecuencia de alimentación variable.
El par motor y la velocidad de los motores de inducción pueden controlarse variando lafrecuencia de alimentación.
fK2V
KV
m
f
m
a
π=
ω=φ
C
Cm
Cr = par motor de la carga
n
b=1
b=0,75
b=0,6
1
0,8
0,6
0,4
0,2
0,80,60,40,20 1

UTN – FACULTAD REGIONAL TUCUMAN
28 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Para una tensión y frecuencia, corresponde un φ determinado, manteniendo el voltaje fijo ydisminuyendo la frecuencia el φ aumenta, causando la saturación y los parámetros del motorno son validos para la determinación de las características momento motor – velocidad.
A bajas frecuencias las reactancias se reducen y la corriente del motor puede resultademasiado alta. Este tipo de control de frecuencia normalmente no se utiliza.
Cuando la frecuencia se incrementa por arriba del valor nominal, el flujo y el par se reducen.
Si la velocidad de sincronismo correspondiente a la frecuencia nominal se la denomina comovelocidad base ωb , la velocidad síncrona a cualquier otra frecuencia se convierte en:
ωβ=ω bs
ωβω−=
ωβω−ωβ=
b
m
b
mb 1s
La expresión del par motor se convierte en:
( )
β+β+
+ωβ
=2
21
22
1b
d
XXsRRs
VR3C2f2
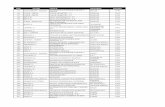
Las características típicas del par – velocidad se muestra en la figura Nº 20, para diferentesvalores deβ , manteniendo fija la tensión de alimentación. Si R1 es despreciable la ecuación
Figura Nº 20
del momento motor máximo a la velocidad nominal o base es: ( )XX2V3
C21b
2f
mm +ω=
El momento motor máximo a cualquier otra frecuencia es: ( ) β=
β+ω= CV
XX23
C mb2f
21bmm
Control de tensión y frecuencia
Si se mantiene constante la relación entre tensión y frecuencia, el flujo se mantiene constante:
C
Cm
32,521,51
Par motor
Cm β = Cmb = constante
β ωs
= b

UTN – FACULTAD REGIONAL TUCUMAN
29 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
fV
K21 f
mπ=φ
Y el par máximo se mantiene constante si lo es la relación entre tensión y frecuencia.
( ) ( )2
fV
LL83
XX2V3
Cs
f
212
21s
2f
mm
+π=
+ω=
Las características típicas del momento motor – velocidad se muestran en la figura Nº 21 .Para una demanda dada del par motor, la velocidad se puede controlar si se varía la frecuenciay tensión simultáneamente. Normalmente se mantiene el par motor constante variando lavelocidad.
El voltaje y frecuencia variable se puede obtener mediante inversores trifásicos ocicloconvertidores, pudiéndose utilizar en aplicaciones de potencias muy grandes, por ejemplolocomotoras y molinos de cemento.
Figura Nº 21
En la figura se muestra una disposición posible de un circuito para la obtención de tensiones yfrecuencias variables.
C (par motor)
Cm1
0,8
0,6
0,4
0,2
0,80,60,40,20 1 β ωsωb
=Carcterísticas par motor - velocidad con contrlol volts/hertz

UTN – FACULTAD REGIONAL TUCUMAN
30 /30ACCIONAMIENTOS Y CONTROLES ELÉCTRICOS
Figura Nº 22
Ing. José Luis Guinudinik
ACCIONAMIENTOS Y CONTROLES ELECTRICOS
UTN -TUCUMAN
Bibliografía:
SELECCIÓN Y APLICACION DE MOTORES ELECTRICOS: Dr. Orlando Silvio Lobosco y JoséLuis Pereira da Costas Días
ELECTRÓNICA DE POTENCIA: Muhammad H. Rashid
MOTORES ASINCRÓNICOS – UBA - Alfredo Rifaldi
MOTORES ELECTRICOS SU CLASIFICACIÓN - Luciano Yescas
Rotor
A C
D C A C
D C
Alim
enta
ción
trifá
sica
InversorRectificador