
MODELAJE Y ANIMACIÓN DEL SISTEMA MUSCULAR A …
61
ISC-2003-1-27 i MODELAJE Y ANIMACIÓN DEL SISTEMA MUSCULAR A PARTIR DE UNA ELECTRO MIOGRAFÍA EN LAS EXTREMIDADES INFERIORES DARWIN EDUARDO MARTÍNEZ RIAÑO UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA DEPARTAMENTO DE SISTEMAS Y COMPUTACIÓN BOGOTÁ, JUNIO DE 2003
Transcript of MODELAJE Y ANIMACIÓN DEL SISTEMA MUSCULAR A …
ISC-2003-1-27
i
MMOODDEELLAAJJEE YY AANNIIMMAACCIIÓÓNN DDEELL SSIISSTTEEMMAA MMUUSSCCUULLAARR AAPPAARRTTIIRR DDEE UUNNAA EELLEECCTTRROO MMIIOOGGRRAAFFÍÍAA EENN LLAASS
EEXXTTRREEMMIIDDAADDEESS IINNFFEERRIIOORREESS
DDAARRWWIINN EEDDUUAARRDDOO MMAARRTTÍÍNNEEZZ RRIIAAÑÑOO
UUNNIIVVEERRSSIIDDAADD DDEE LLOOSS AANNDDEESSFFAACCUULLTTAADD DDEE IINNGGEENNIIEERRÍÍAA
DDEEPPAARRTTAAMMEENNTTOO DDEE SSIISSTTEEMMAASS YY CCOOMMPPUUTTAACCIIÓÓNNBBOOGGOOTTÁÁ,, JJUUNNIIOO DDEE 22000033

ISC-2003-1-27
ii
MMOODDEELLAAJJEE YY AANNIIMMAACCIIÓÓNN DDEELL SSIISSTTEEMMAA MMUUSSCCUULLAARR AAPPAARRTTIIRR DDEE UUNNAA EELLEECCTTRROO MMIIOOGGRRAAFFÍÍAA EENN LLAASS
EEXXTTRREEMMIIDDAADDEESS IINNFFEERRIIOORREESS
DDAARRWWIINN EEDDUUAARRDDOO MMAARRTTÍÍNNEEZZ RRIIAAÑÑOO
TTeessiiss ddee pprreeggrraaddoo ppaarraa ooppttaarr aall ttííttuulloo ddee IInnggeenniieerroo ddeeSSiisstteemmaass yy CCoommppuuttaacciióónn
PPrrooffeessoorr AAsseessoorrFFEERRNNAANNDDOO DDEE LLAA RROOSSAADDooccttoorraaddoo eenn IInnffoorrmmááttiiccaa
UUNNIIVVEERRSSIIDDAADD DDEE LLOOSS AANNDDEESSFFAACCUULLTTAADD DDEE IINNGGEENNIIEERRÍÍAA
DDEEPPAARRTTAAMMEENNTTOO DDEE SSIISSTTEEMMAASS YY CCOOMMPPUUTTAACCIIÓÓNNBBOOGGOOTTÁÁ,, JJUUNNIIOO DDEE 22000033

ISC-2003-1-27
iii
Tabla de Contenido
Introducción ....................................................................................................1
1 Marco Teórico y Contexto Tecnológico .......................................................3
1.1 Fisiología del Músculo Esquelético ...........................................................3
1.1.1 La estructura el Músculo Esquelético .....................................................4
1.1.2 Acción del Músculo Esquelético .............................................................7
1.1.2.1 Contracciones Isométricas .................................................................7
1.1.2.2 Contracciones Isotónicas ...................................................................8
1.1.3 Función Neuro – Muscular ..................................................................10
1.2 Electro Miografías .................................................................................12
1.2.1 Que es una electro miografía? ............................................................12
1.2.2 Interpretación de un EMG ...................................................................13
1.2.3 Electro Miografía Dinámica .................................................................14
1.3 Animación por Computador ...................................................................15
1.3.1 Tipos de sistemas de Animación ..........................................................16
1.3.1.1 Keyframing .....................................................................................16
1.3.1.2 Sistemas de Scripting ......................................................................16
1.3.1.3 Animación por procesos ...................................................................17
1.3.1.4 Animación representativa .................................................................17
1.3.1.5 Animación estocástica ......................................................................17
1.3.1.6 Animación de comportamientos ........................................................18
1.3.2 Animación de cuerpos rígidos y flexibles ..............................................18

ISC-2003-1-27
iv
1.4 Herramientas existentes .......................................................................19
1.4.1 Software for Interactive Musculoskeletal Modeling – SIMM ….…………….19
2 Problemática y Propuesta de solución .......................................................20
2.1 Método de animación ...........................................................................21
2.2 Interfaz ...............................................................................................22
3 Modelos Propuestos ................................................................................23
3.1 Modelo Geométrico ...............................................................................23
3.1.1 Descripción de cada parte del modelo geométrico ................................24
3.1.1.1 Sacro y pelvis ..................................................................................25
3.1.1.2 Fémur Izquierdo y Fémur Derecho ....................................................26
3.1.1.3 Tibia-peroné Izquierdo y Tibia-peroné Derecho .................................26
3.1.1.4 Pie izquierdo y derecho ....................................................................27
3.2 Modelo mecánico .................................................................................27
3.2.1 Definición .........................................................................................28
3.2.2 La acción muscular ............................................................................30
3.2.3 Movimiento del aparato locomotor ......................................................32
3.3 Método de control de movimiento ..........................................................32
4 Implementación ......................................................................................34
4.1 Requerimientos funcionales ...................................................................34
4.1.1 Animación .........................................................................................35
4.1.2 Fácil Interacción ................................................................................35
4.1.3 Carga dinámica de electro miografías ..................................................35
4.1.4 Visualización ......................................................................................35
4.1.5 Resultados gráficos ............................................................................35
4.2 Requerimientos no funcionales ..............................................................36
4.2.1 Programa multiplataforma LINUX WINDOWS. ......................................36
4.2.2 Requiere instalación de OpenGL en Windows y mesaGL en Linux ..........36
4.2.3 Fast Light Tool Kit FLTK ………………………………………………………….……..37
ISC-2003-1-27
v
4.2.4 Coin ……………………………………………………………………………………………….37
4.3 Diagrama de casos de uso ....................................................................38
4.4 Diagrama de clases ..............................................................................39
4.5 Diagramas de secuencia .......................................................................40
4.6 Diagrama de manejo de interfaz ............................................................43
4.7 Como funciona el programa ..................................................................43
5 Conclusiones y Trabajos Futuros ..............................................................49
5.1 Trabajos futuros ...................................................................................50
5.1.1 Nivel de detalle en el diseño ...............................................................51
5.1.2 Nivel de detalle grafico del aparato locomotor ......................................51
5.1.3 Integración completa con el trabajo existente en el instituto Roosevelt ..51
5.1.4 Persistencia de resultados ..................................................................52
5.1.5 Esquema de simulación ......................................................................52
6 Bibliografía .............................................................................................53
ISC-2003-1-27
vi
Tabla de Figuras
1-1 Estructura del Músculo Esquelético ..........................................................4
1-2 Estructura Funcional de un Sarcómero......................................................6
1-3 Tetanización de un Músculo ....................................................................9
1-4 Unidad Motora .....................................................................................11
1-5 Resultado de una electro miografía ........................................................13
2-1 Estructura de un glúteo contra la del femoral recto .................................21
3-1 Modelo Geométrico ...............................................................................24
3-2 Estructura del sacro y pelvis con ejes propios .........................................25
3-3 Grados de libertad de la pelvis ..............................................................26
3-4 Grados de libertad del Fémur ................................................................26
3-5 Grados de libertad del segmento Tibia-Peroné ........................................27
3-6 Modelo mecánico sobre una articulación ................................................28
3-7 Relación Trabajo - Movimiento ..............................................................29
3-8 Torques y formas de movimiento ..........................................................30
3-9 Flexión muscular ..................................................................................31
3-10 Identificación de un movimiento ............................................................31
4-1 Diagrama de casos de uso ....................................................................38
4-2 Diagrama de clases ..............................................................................39
4-3 Diagrama de secuencia caso de uso cargar ............................................40
4-4 Diagrama de secuencia caso de uso reproducir .......................................40
4-5 Diagrama de secuencia caso de uso reproducir .......................................41
4-6 Diagrama de secuencia caso de uso parar ..............................................41

ISC-2003-1-27
vii
4-7 Diagrama de secuencia caso de uso pausar ............................................41
4-8 Diagrama de secuencia caso de uso adelantar ........................................42
4-9 Diagrama de secuencia caso de uso atrasar ...........................................42
4-10 Diagrama de secuencia caso de uso ubicar .............................................42
4-11 Diagrama de flujo de manejo de interfaz ................................................43
4-12 Pantalla general de la aplicación ............................................................44
4-13 Ventana de selección de Músculos Visibles y con EMG asociado ...............46
4-14 Distintas Vistas .....................................................................................47
4-15 Ejemplo gráfica comparativa con un solo EMG ........................................48

ISC-2003-1-27
1
IInnttrroodduucccciióónn
La rápida evolución de los sistemas computacionales ha generado un fenómeno en
el cual otras ramas de la ciencia y la tecnología orientan parte de su desarrollo a la
integración con herramientas computacionales que les permitan no solo
administrar sus datos y resultados de manera eficiente sino también apoyarlos en
el estudio y desarrollo de sus investigaciones y trabajos.
La medicina no escapa a este fenómeno y por el contrario en cada una de sus
ramas a integrado distintos sistemas que apoyen su trabajo. En particular en el
caso del análisis de la marcha humana se ha interesado por poder capturar los
datos necesarios para el análisis; hacer un seguimiento del comportamiento
específico de cada paciente, brindando así una poderosa herramienta que facilita el
estudio por parte de los especialistas.
En el análisis de marcha humana se deben tener en cuenta todos los factores que
pueden causar anomalías en el movimiento, estas anomalías pueden ser causadas
tanto por deficiencias en la estructura ósea como por deficiencias en la función
muscular. Es por esto que se han interesado en el desarrollo de modelos de
animación y de simulación con los que se pretenden representar de manera
general el comportamiento que tendría el movimiento.

ISC-2003-1-27
2
Estas son precisamente las razones que hacen necesaria una buena representación
del cuerpo humano y una eficiente integración con los datos reales recogidos por
las pruebas realizadas al paciente, con lo que se mejora el cálculo de las funciones
biomecánicas que representan el movimiento del paciente específico.
En este caso el desarrollo del modelo muscular es la parte esencial del problema,
pues con él se representa claramente la forma del movimiento que tendrá la
estructura ósea, por tanto dependiendo del punto de acción de cada fuerza; es
decir, del punto donde se une un músculo con el hueso y de la cantidad de fuerza
ejercida por este, se producirá el movimiento específico. Resumiendo el
movimiento esta conjuntamente definido por la estructura (sistema óseo) y las
fuerzas que actúan sobre ella (sistema muscular) entonces se hace necesaria la
integración del modelo muscular para que el análisis de los datos recolectados por
una electro miografía y su animación tenga gran relación con la realidad del
paciente.
La importancia que recae en la utilización de una electro miografía (EMG) es el
conocimiento de anomalías en el movimiento que pueden ser causadas por
deficiencias en el sistema nervioso, es así como un análisis de un EMG muestra
claramente cual músculo se está activando en el momento de generar un
movimiento. Si además integramos un modelo de animación, se puede hacer más
fácil el reconocimiento de este tipo de problemas en puntos específicos del análisis.
A continuación en el presente documento se mostrará: en el capítulo 1 - el marco
teórico y el contexto tecnológico, en el capítulo 2 - la problemática a resolver y
propuesta de solución, en el capítulo 3 - los modelos propuestos, en el capítulo 4 -
la implementación y finalmente en el capítulo 5 – las conclusiones y los trabajos
futuros.
ISC-2003-1-27
3
11 MMaarrccoo TTeeóórriiccoo yy CCoonntteexxttoo TTeeccnnoollóóggiiccoo
En este capítulo veremos los estudios previos que tienen relevancia en la presente
tesis está enfocada exclusivamente a la fisiología del sistema muscular, a uno de
los métodos usados para estudiar el comportamiento muscular como son las
electro miografías y finalmente se verán algunos de los conceptos de animación
estudiados para el desarrollo.
Además en cuanto al contexto tecnológico se menciona una de las herramientas
existentes para el análisis de marcha que integra sistema óseo y muscular, no se
mencionan otras debido a que casi cada hospital importante posee su propio
laboratorio de marcha pero no presentan información alguna sobre las
herramientas que usan para el análisis de la marcha humana, pero es muy
probable que al igual que el Instituto Roosevelt tengan convenios con
universidades para la investigación y desarrollo de herramientas que se centran en
este tema.
1.1 Fisiología del músculo esquelético
El músculo esquelético es el motor primario de la locomoción. La base de dicho
movimiento es la transformación de energía química en energía mecánica, y es
precisamente en esta función en la que las células musculares se han
especializado.
ISC-2003-1-27
4
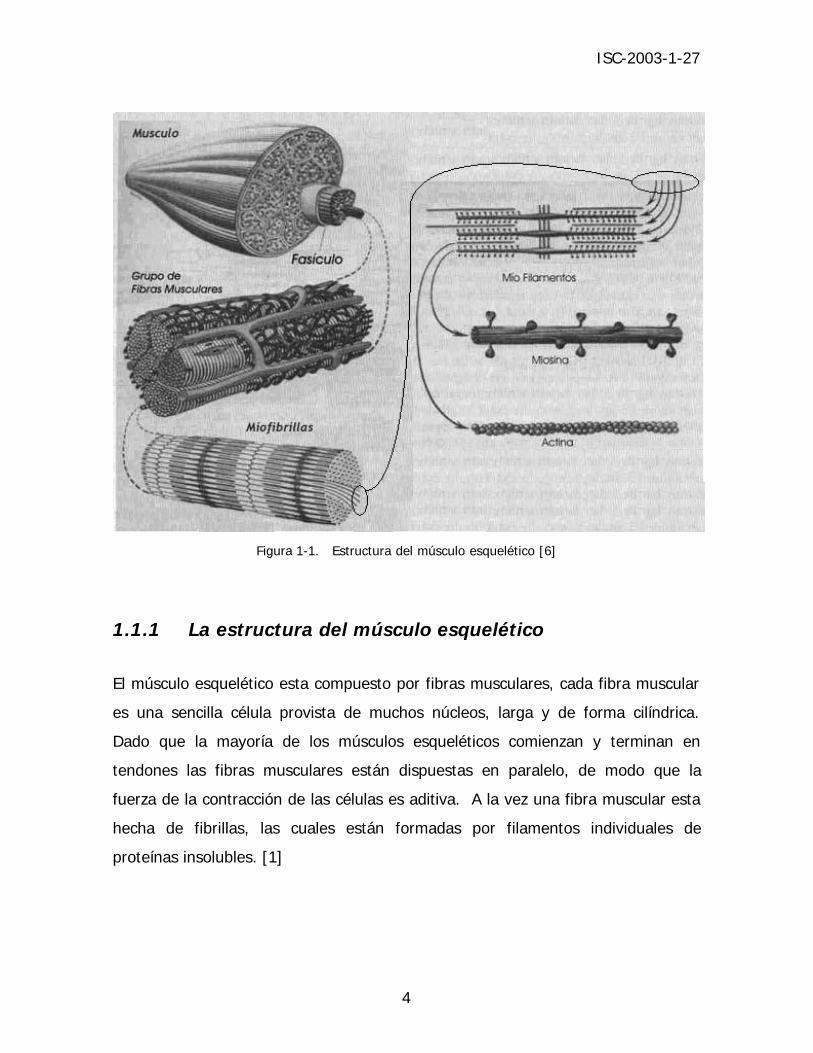
Figura 1-1. Estructura del músculo esquelético [6]
1.1.1 La estructura del músculo esquelético
El músculo esquelético esta compuesto por fibras musculares, cada fibra muscular
es una sencilla célula provista de muchos núcleos, larga y de forma cilíndrica.
Dado que la mayoría de los músculos esqueléticos comienzan y terminan en
tendones las fibras musculares están dispuestas en paralelo, de modo que la
fuerza de la contracción de las células es aditiva. A la vez una fibra muscular esta
hecha de fibrillas, las cuales están formadas por filamentos individuales de
proteínas insolubles. [1]
ISC-2003-1-27
5
La estructura básica de contracción son precisamente las proteínas que están
dispuestas en filas organizadas en forma de citoesqueleto, dando así forma de
anclaje y transmisión de fuerza en los mío filamentos. La forma más sencilla de
unidad contráctil es el sarcómero. En el citoesqueleto están enlazados una gran
cantidad de sarcómeros, conectados mecánicamente por discos Z. [2]
Los filamentos delgados son estructuras celulares formados por actina, troponina y
tropomiosina, y están sujetos por los discos Z.[1]
Los filamentos gruesos son moléculas de miosina unidas por la cola de la molécula
de las que sobresalen cabeza y cuello, proyectándose hacia los filamentos
delgados en un puente cruzado. [2]
Las interacciones entre los puentes cruzados y el filamento delgado atraen a los
filamentos delgados hacia el centro del sarcómero haciendo que la distancia entre
discos Z se acorte.
El movimiento al interior de la célula está ligado con la hidrólisis cíclica del ATP.
Este ciclo puede representarse en cuatro etapas:
• El ATP es hidrolizado para formar un complejo de ADP-Pi se une rápidamente a
los filamentos delgados
• El ADP y el Pi se liberan cuando la miosina se une al filamento delgado
• El complejo resultante actina miosina tiene un bajo nivel de energía libre
entonces se le une ATP
• Actina, miosina y ATP tiene una baja afinidad de unión provocando que el
puente cruzado se disocie del filamento delgado, la hidrólisis interna del ATP
unido regenera el complejo de elevada energía miosina-ADP-Pi
ISC-2003-1-27
6
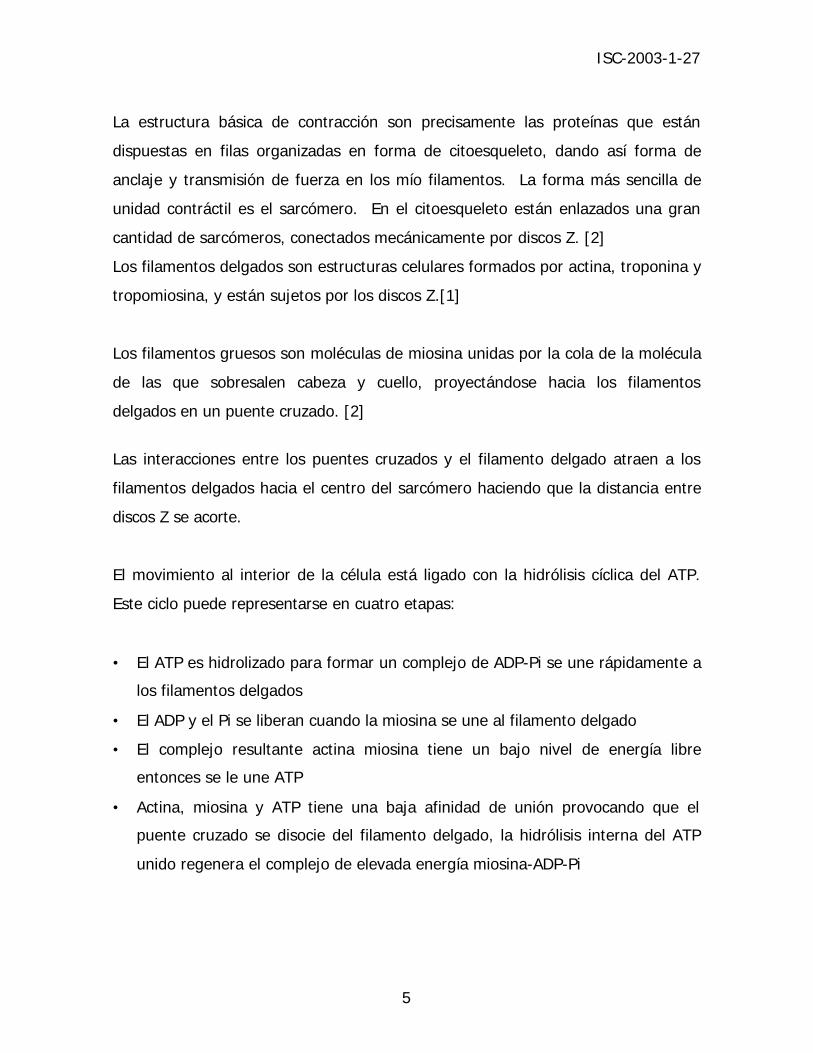
En este ciclo la mayor parte de la energía que se libera se pierde como calor. La
conversión de parte de esta energía en trabajo mecánico depende de la estructura
del sarcómero. La orientación de las cabezas de miosina esta forzada, y su
orientación preferida de los complejos de alta energía es perpendicular al filamento
grueso, mientras que los de baja energía son 45 grados con respecto a los
filamentos. Entonces parte de la energía del ATP se destina a la conformación del
puente cruzado, y es de esta forma como el puente cruzado origina fuerzas que
arrastran los filamentos delgados entre los filamentos gruesos hacia el centro del
sarcómero. La fuerza es transmitida por el citoesqueleto a los extremos de la
célula donde ejerce fuerza sobre el esqueleto. [2]
D i s c o Z D i s c o Z
S a r c ó m e r o
Filamentogrueso
Filamentodelgado
Figura 1-2 Estructura Funcional de un sarcómero [1]
Las velocidades de los ciclos de puente cruzado acortamiento determinan la
rapidez con la que se contrae un músculo, las velocidades de acortamiento
máximas ocurren cuando no se opone fuerza alguna al deslizamiento de los
filamentos. Una fuerza ejercida sobre una célula muscular es transmitida por el
Sarcómero
Filamentodelgado
Filamentogrueso
Discos Z

ISC-2003-1-27
7
citoesqueleto al sarcómero donde se opone a la flexión de los puentes cruzados.
El incremento de la fuerza es resultado del aumento en el ciclo de los puentes
cruzados. Las velocidades caen hasta cero cuando la oposición impide la
conformación de 90º a 45º. Las velocidades de acortamiento sin resistencia varían
de célula en célula. [1][2]
1.1.2 Acción del músculo esquelético
Las células musculares contráctiles pueden llevar a cabo varias acciones. Pueden
desarrollar fuerza sin acortamiento, pueden acortarse a diferentes velocidades,
también pueden alargarse mientras se oponen a una fuerza mayor. Por esto la
fuerza de respuesta esta determinada por la carga. La fuerza, la longitud y el
tiempo son variables suficientes para describir el rendimiento del músculo de
manera satisfactoria. El análisis se simplifica manteniendo constante una de las
variables y observando el comportamiento entre las otras dos. Esta situación
determina los dos tipos de contracciones: isométrica e isotónica. [2]
1.1.2.1 Contracciones Isométricas
En las contracciones isométricas la fuerza depende de la longitud. Una célula
muscular desarrolla una fuerza característica cuando es estimulada al máximo
mientras se mantiene a una longitud constante. La fuerza es proporcional al
número de puentes cruzados que interactúen con el filamento delgado de cada
mitad del sarcómero. Las fuerzas que se generan dependen del tamaño de la
célula y del número de filamentos. Este comportamiento pasivo es el resultado de
la elasticidad de las proteínas estructurales, incluidas las proteínas del
citoesqueleto y las proteínas extracelulares dispuestas en fibrillas de colágeno y
elastina. [2]

ISC-2003-1-27
8
1.1.2.2 Contracciones Isotónicas
En las contracciones isotónicas la velocidad esta en función de la carga. El
músculo relajado esta en la longitud óptima para el desarrollo de fuerza, si la carga
es mayor de lo que el músculo puede levantar, la fuerza máxima se desarrolla en
una contracción isométrica, pero si por el contrario la carga es algo menor, el
desarrollo de la fuerza es isométrico hasta que la fuerza iguala la carga y a partir
de ese momento el músculo comienza a acortarse isotónicamente. La relación
entre fuerza y velocidad es la muestra mecánica de la suma de todas las
interacciones de los puentes cruzados de la célula.
Aunque el ciclo de puente cruzado solo conduce a desarrollar una fuerza y el
acortamiento, la gravedad u otras fuerzas de acción imponen grandes cargas que
alargan las células del músculo contraído. Una célula muscular puede resistir
brevemente cargas hasta un 60% mayores que las que la célula es capaz de
desarrollar. La unión del puente cruzado es fuerte y se necesita de una gran carga
para imponer un cambio conformacional de 90º a 135º, los puentes cruzados
estirados se sueltan del filamento delgado y se vuelven a unir para resistir más
estiramiento. [2]
En una célula muscular se combinan gran cantidad de sarcómeros y la naturaleza
de la combinación determina el rendimiento de la célula o en general del músculo.
En los sarcómeros combinados en serie se mantiene la fuerza y se duplica la
velocidad mientras que una combinación en paralelo duplica la fuerza y mantiene
la velocidad constante. [2]
La fibra muscular es eléctricamente refractaria durante la fase ascendente y parte
de la fase descendente, la contracción inicial apenas comienza; sin embargo, dado
que el mecanismo contráctil no tiene periodo la estimulación repetida provoca una

ISC-2003-1-27
9
activación adicional de los elementos contráctiles antes de que ocurra la relajación
lo cual hace que la respuesta se agregue a la contracción ya existente. La tensión
desarrollada durante la suma de contracciones es mayor que la sacudida muscular
individual. Con la estimulación repetida, la activación del mecanismo contráctil
ocurre iterativamente antes que aparezca relajación alguna y las respuestas
individuales se fusionan en una contracción continua llamada tétanos o contracción
tetánica. [1]
Figura 1-3. Acción de un músculo tetanizado [2]
El esqueleto sirve como sistema de soporte de tipo palanca sobre el que actúan la
mayoría de las células. De modo característico, las células del músculo se
distribuyen entre dos articulaciones antes que insertarse en el esqueleto a través
de tendones. Las células musculares esqueléticas se caracterizan por:
• Cada célula actúa independientemente en respuesta a un impulso nervioso
• El esqueleto soporta la mayor parte de las fuerzas gravitatorias
• Las células musculares esqueléticas suelen estar relajadas, actúan de modo
característico sobre el extremo corto de la palanca.
Por esto deben desarrollar fuerzas mayores a las cargas que mueven. Los
músculos pueden actuar juntos como sinérgicos para producir el mismo
tétanos
pulso

ISC-2003-1-27
10
movimiento, o como antagonistas para decelerar un movimiento. La suma de sus
acciones puede estabilizar una articulación o producir un movimiento controlado de
modo preciso. Normalmente tanto los flexores como los extensores están
implicados en un movimiento. En ocasiones también se observan casos de
músculos que acostumbran a realizar un movimiento específico, lo que refleja las
diferencias de aprendizaje o entrenamiento neuro musculares. [2]
En la regulación de la contracción intervienen cuatro membranas celulares
diferentes en cuanto a estructura y función:
1 Membrana plasmática: unión neuro muscular
2 sarcolema: propagación del potencial de acción
3 Red de túbulos traversos: evita la propagación de potenciales de acción al
interior de la célula haciendo que el flujo del potencial se haga de forma
gradual por la célula.
4 Retículo sarcoplasmático: conecta íntimamente los túbulos traversos.
1.1.3 Función Neuro muscular
El músculo esquelético no se contrae a menos que sea en respuesta a la
estimulación de su inervación motora. La destrucción de ésta causa atrofia
muscular. También conduce a una excitabilidad anormal e incrementa la
sensibilidad del músculo.
Los axones de las neuronas espinales que inervan el músculo esquelético se
ramifican para hacer contacto con varias fibras a la vez, es decir, que en respuesta
de un estímulo generado por una sola neurona no será solo una célula muscular la
ISC-2003-1-27
11
que responda a dicho estímulo. El conjunto funcional resultante, formado por un
nervio y sus células musculares asociadas recibe el nombre de unidad motora. El
número de fibras musculares en una unidad motora es variable en cuanto a la
especialización del músculo, es decir, entre más preciso es el movimiento del
músculo mayor es su número de unidades motoras sin importar el tamaño del
músculo. Cada neurona espinal inerva un solo tipo de fibra muscular, entonces
todas las fibras musculares que forman la unidad motora son del mismo tipo. Las
unidades motoras se dividen en rápidas o lentas según la velocidad de respuesta a
un estímulo.
Figura 1-4. Unidad Motora [5]

ISC-2003-1-27
12
1.2 Electro Miografías (EMG)
La fuerza muscular refleja los procesos de neuro control subyacentes, responsables
de los patrones de movimiento. Es esta misma fuerza la que juega el papel más
importante en el momento de determinar el estrés en los huesos y articulaciones.
Entonces el conocimiento de la fuerza muscular es fundamental para mejorar el
diagnóstico y tratamiento de individuos con desordenes de movimiento, entonces
la interpretación de la función muscular basada en el análisis de datos obtenidos
por una electro miografía durante el estudio de la marcha es una buena estrategia.
Resumiendo, el conocimiento de la fuerza muscular actuando sobre un cuerpo
permite mejorar el diagnóstico y tratamiento de pacientes con discapacidad de
movimiento. Pero técnicas como la electro miografía no son suficientes. [3]
1.2.1 Que es una Electro Miografía
Una electro miografía consiste en el registro del trabajo eléctrico del músculo. Una
electro miografía dinámica identifica el periodo y la intensidad relativa del
funcionamiento del músculo, las señales eléctricas que acompañan la estimulación
química de las células musculares pasan a través de los músculos y los tejidos
adyacentes y con los instrumentos indicados las señales mioeléctricas son
analizadas. [5]
La señal de la electro miografía indica la activación de unidades motoras. La
activación del músculo es determinada por el número de unidades motoras que
son activadas, adicionalmente también influye el tamaño y el tipo de las células.
[5]

ISC-2003-1-27
13
Figura 1-5. Resultado de una electro miografía [5]
1.2.2 Interpretación de un EMG
La señal de una Electro miografía es una suma algebraica de potenciales eléctricos
conocidos como acción potencial de unidades motoras (motor unit action potentials
MUAPS) que son generados cuando un músculo se contrae. Un registro de una
electro miografía se obtiene mediante electrodos, los cuales pueden ser
superficiales o de inserción en el músculo. La elección del tipo de nodo es
determinante para el estudio que se quiere realizar sobre el músculo, por ejemplo
si se necesita conocer la actividad muscular profundamente se deberán usar
electrodos de inserción. Aunque cualquier tipo de electrodo se puede usar, la
elección de uno u otro traerá consigo ventajas y desventajas. Electrodos de
inserción son muy selectivos y toma la actividad eléctrica de una área pequeña, lo
cual hace posible medir la capacidad de músculos pequeños con bajo riesgo de
mezclarlos con la medida de músculos adyacentes. Sin embargo el proceso de
inserción es doloroso y causa un incremento en el tono y espasmo muscular
particularmente en niños. Por el contrario, los electrodos superficiales son menos
discriminantes y detectan potencial en una mayor área del músculo aunque se

ISC-2003-1-27
14
incrementa el riesgo de mezclas de medidas de diferentes músculos, aún así ellos
proveen una mejor indicación del trabajo de un músculo o un grupo de músculos si
se minimiza la posible mezcla de medidas de músculos. [4]
La señal de un electromiograma de una unidad motora resulta en una onda
compleja, porque la dispersión de las fibras a través del músculo produce
diferencias en el momento de activación. Un EMG clásico representa la activación
de un grupo de unidades motoras. Este resultado es una serie asincrónica de
ondas que varían en amplitud y duración, pero el EMG tiene un patrón de
interferencia como resultado de los mecanismos usados para incrementar la fuerza
del músculo, tal como sumar unidades motoras o aumentar la frecuencia de
estimulación de las mismas unidades motoras. [5]
Además la interpretación de la señal de un EMG es difícil, pues existen varios
factores que pueden afectarla, la localización del electrodo, el tamaño y la forma,
la distancia entre electrodos, la cantidad de tejido adiposo interpuesto y el área de
intersección del músculo en cuestión son los factores que más afectan la medida.
La señal de un EMG puede ser procesada de varias formas, desde una rectificación
completa de la onda (FWR) hasta un análisis de frecuencia. [4]
1.2.3 Electro Miografía Dinámica
Clínicamente una electro miografía dinámica es la única forma disponible de
determinar cuál y cuando un músculo está activo durante un movimiento. A pesar
de los inconvenientes que presentan la interpretación de la señal, la calibración y
los demás percances mencionados anteriormente.
Cada electro miografía dinámica tiene dos tipos de información, el tiempo de la
acción muscular y la intensidad relativa. La señal de la electro miografía puede ser
ISC-2003-1-27
15
convertida en valores numéricos, cuyo objetivo es establecer el valor de la
intensidad relativa de la acción del músculo durante un periodo. El computador
cuantifica una muestra, rectificando e integrando los datos. La rectificación
traspone todos los valores negativos de las señales a valores positivos. La
integración consiste en sumar los datos rectificados en intervalos de tiempo
acordes con el examen clínico. El intervalo de duración se basa en la rata de
cambio de la actividad al ser ejecutada. El análisis emplea ratas alrededor de 0.01
segundos para correlacionar apropiadamente el conjunto de datos obtenidos por la
electro miografía. [5]
La importancia que tienen las electro miografías es la oportunidad que éstas dan
de conocer si el problema locomotor viene como resultado de una parálisis
cerebral e identificar puntualmente que esta haciendo un músculo, cuando y con
que intensidad.
1.3 Animación por Computador
Los principios de animación no han cambiado mucho desde su aparición, sin
importar los nuevos mecanismos y tecnologías como el uso de computadores.
Desde el inicio la animación se producía como una sucesión de marcos, que
parecían continuos en una película, luego surgió otro método el cual se basa en el
uso de modelos físicos, en donde la figura se movía de acuerdo a los principios
físicos del modelo. Hoy en día prevalecen estos dos métodos, aunque, su forma
de ejecución si se ha visto afectada por los avances tecnológicos.
La animación por computador puede ser realizada por medio de la producción de
marcos sucesivos en donde el aspecto de la imagen varia. Otra forma de realizar

ISC-2003-1-27
16
la animación es a partir de un modelo físico que representa las leyes físicas que
rigen el comportamiento de los objetos.
Lo más importante en la animación es el control de movimiento, en donde el
modelo físico brinda ventajas pues es posible determinar reglas para cada uno de
los objetos en escena. Los sistemas computacionales poseen diferentes tipos de
control de movimiento los cuales dependen del nivel de abstracción del mundo. En
la abstracción de bajo nivel, el programador debe especificar cada detalle de
movimiento, y en la abstracción de alto nivel permite el uso de reglas que definen
el movimiento.
1.3.1 Tipos de Sistemas de Animación
Los tipos de sistemas de animación clasifican los métodos de control de
movimiento.
1.3.1.1 Keyframing
Es el tipo de animación clásica, donde la animación parte de dibujar marcos
(frames) intermedios llamados keyframes y luego otro animador dibuja los
intermedios por medio de técnicas como la interpolación de imágenes.
1.3.1.2 Sistemas de Scripting
Los sistemas de Scripting se caracterizan porque el programador escribe un
programa en un lenguaje de animación donde se encuentra el comportamiento del
objeto. Por ejemplo ASAS (Actor Script Animation Language) sirve para escribir
ISC-2003-1-27
17
estas reglas de comportamiento y luego el programa se debe encargar de seguir
las reglas anteriormente especificadas. [8]
1.3.1.2 Animación por Procesos
Los procesos son usados para definir movimiento a través del tiempo. Entonces
los procesos usan las leyes físicas que deben regir el comportamiento de los
objetos. Por ejemplo están los movimientos que nacen como resultado de otros
movimientos iniciales. [8]
1.3.1.3 Animación Representativa
Este método permite a los objetos cambiar su forma durante la animación. Existen
tres tipos de animación representativa:
1. Animación de objetos articulados: Objetos complejos compuestos de
segmentos rígidos interconectados.
2. Animación de objetos suaves: Usada para deformar y animar objetos.
3. Morphing: que consiste en cambiar la forma de un objeto en una nueva y
diferente forma. [8]
1.3.1.4 Animación estocástica
Usa procesos estocásticos para controlar grupos de objetos como partículas de
aire, fuego, agua, etcétera. En general este tipo de procesos se utilizan cuando se
quiere modelar un gran número de objetos similares o iguales que tienen un
comportamiento singular según el entorno. [8]

ISC-2003-1-27
18
1.3.1.5 Animación de Comportamientos
Los objetos tienen sus propias reglas, las cuales dicen como se deben comportar
de acuerdo a su entorno; es decir, en la definición de cada objeto se define cual
es el comportamiento que éste deberá tener en una circunstancia específica, en
otras palabras el objeto tienen la capacidad de evaluar el entorno y según las
características que este presente se comportará. [8]
1.3.2 Animación de cuerpos rígidos y flexibles
En la animación del sistema muscular sobre el sistema óseo se tiene modelos de
objetos rígidos, como el sistema óseo, y modelos de objetos flexibles como el
sistema muscular.
Para la animación de los objetos rígidos usamos la animación representativa de
objetos articulados teniendo en cuenta los principios físicos de la mecánica
Newtoniana como:
• Velocidad Lineal
• Aceleración Lineal
• Aceleración Angular
• Aceleración Centrípeta
• Fuerzas
• Colisiones
• Inercia
• Centro de Masa
• Momento Angular y Momento de Inercia

ISC-2003-1-27
19
• Torques
• Fricción
Eventos y fórmulas que marcan el comportamiento de los objetos rígidos. [7]
Para la animación de objetos flexibles usamos la animación representativa de
objetos suaves basados en posprincipios de la mecánica Newtoniana aplicada a
objetos flexibles como resortes, adicional a la usada con objetos rígidos[7]
1.4 Herramientas Existentes
Actualmente en el mercado existen varias herramientas que modelan muy bien el
aparato locomotor en general. Entre estas herramientas se destacan:
1.4.1 Software for Interactive Musculoskeletal Modeling
SIMM es un paquete de software gráfico que permite al usuario un rápido
desarrollo y análisis del modelo del aparato locomotor (sistema óseo y sistema
muscular en conjunto). En esta herramienta el aparato locomotor consta de
huesos, músculos, ligamentos y otras estructuras. Los músculos empalman y
desarrollan las fuerzas con las que se generan momentos acerca del movimiento
de la estructura ósea, esto es usado por la herramienta para calcular los
momentos de cada músculo y la posición de cada elemento en el cuerpo. Para
manipular los elementos consta de una interfaz gráfica que permite modelar los
cambios y examinar los efectos que generan. El análisis de la marcha humana lo
hace leyendo de archivos GDC, que es un formato de archivos CAD donde se
representa el valor de los estados del modelo. [9]
ISC-2003-1-27
20
22 PPrroobblleemmááttiiccaa yy PPrrooppuueessttaa ddee SSoolluucciióónn
La problemática es la falta de formas de visualización del trabajo realizado por el
sistema muscular. A pesar que en el Laboratorio de Marcha del Instituto Franklin
Delano Roosevelt existen herramientas para realizar una electro miografía, el análisis
posterior del EMG no cuenta con una visualización acorde con los datos registrados
más que con una gráfica de trabajo o esfuerzo realizado por el músculo contra el
tiempo, donde se observan los valores de la electro miografía.
El problema radica en el proceso de modelación de los músculos para agregar
adecuadamente las propiedades que lo definen y los métodos necesarios para modelar
su comportamiento (al hablar de músculos me refiero especialmente a los subgrupos
que lo conforman, filamentos, fibrillas, miofibrillas...).
La diversidad existente entre un músculo y otro se da por los sitios en los que los
músculos se unen a los tendones o directamente sobre los huesos, en ambos casos,
los puntos de inserción son los causantes del volumen del músculo y del movimiento
realizado por el hueso. Un ejemplo de estas diferencias se ve notoriamente, si
observamos por separado un glúteo y el femoral: es claro observar que los puntos de
inserción del glúteo hacen que éste requiera hacer mas fuerza para mover la pierna y
es por esto que este músculo requiere tener más volumen, por otro lado el femoral
tiene puntos de inserción que ayudan a su labor de movimiento, y el volumen del
músculo no es tan asombroso como el del glúteo.

ISC-2003-1-27
21
Figura 2-1 Estructura del glúteo contra la estructura del femoral recto
La idea general para la solución es crear una interfaz gráfica que permita al
especialista interacción con el modelo muscular siguiendo la línea de animación
creada a partir de los datos recolectados por la electro miografía, en donde pueda
elegir el músculo que quiere visualizar de acuerdo con el registro de datos, y en
donde pueda fácilmente pasar entre los distintos estados de la animación, es decir
donde pueda atrasarse o adelantarse en la visualización hasta puntos específicos
que él considere pertinentes para el análisis apropiado.
Adicionalmente especificar un modelo muscular que cumpla con las necesidades
básicas de movimiento, es decir, un modelo que ilustre claramente la mecánica
que se desarrolla por medio de la acción de fuerzas que provienen de la acción
muscular y que además sea consecuente con los resultados que se obtiene en la
extremidad que se encuentra bajo dicha acción.
2.1 Método de Animación
El método de animación propuesto esta fuertemente ligado a los modelos
estructurales que conforman el sistema óseo y el sistema muscular. La fisiología
ISC-2003-1-27
22
de cada uno de estos sistemas determina cual es el mejor método a aplicarse, en
este caso se hace una animación representativa en dos de sus formas conocidas.
Basado en el conocimiento de la rigidez del sistema óseo se utiliza un esquema
sencillo de animación de cuerpos rígidos que utiliza las leyes de la mecánica
Newtoniana para representar el comportamiento de la estructura ósea. De otro
lado y apoyado en la flexibilidad del sistema muscular se utiliza un esquema
sencillo de animación de cuerpos flexibles para representar los acortamientos y
alargamientos de un músculo en particular.
2.2 Interfaz
La idea de la interfaz es brindar un control de reproducción claro con el cual poder
interactuar con la visualización animada del modelo. El control de reproducción es
control clásico de seis botones:
* Atrás * Reproducir * Pausar
* Parar * Adelantar * Cargar
Además contará con un deslizador que permite el seguimiento en cada instante y
permite la ubicación exacta de un punto en la animación.
ISC-2003-1-27
23
33 MMooddeellooss pprrooppuueessttooss
Los modelos propuestos especifican la estructura ósea que se muestra a través del
modelo geométrico debido a la característica de rigidez y el sistema muscular por
medio del modelo mecánico debido a que su acción es la causa del movimiento del
modelo geométrico.
3.1 Modelo geométrico
En el modelo geométrico se especifican los puntos desde y hasta donde llegan los
huesos y los músculos. Se realiza un modelo que siga la forma y la proporción del
cuerpo humano, y aunque es un modelo único, en cuanto a la visualización es
suficiente para observar el movimiento realizado.
Es así como el modelo geométrico se ve como un conjunto de cilindros
interconectados que hacen las veces de estructura ósea. Es en este modelo donde
definimos los grados de libertad de cada elemento y se dan límites a los
movimientos, es decir, que de acuerdo con la estructura de cada hueso y
particularmente de la articulación que manda su movimiento, este podrá rotar en
una dirección específica un número determinado de grados.

ISC-2003-1-27
24
Figura 3-1 Modelo Geométrico.
3.1.1 Descripción de cada parte del Modelo Geométrico
En esta sección se describirá la geometría usada en la definición de cada segmento
óseo (entiéndase como segmento óseo un segmento que esta unido a una misma
articulación en orden descendente).
Se identifican tres articulaciones, la pelvis y cada uno de los Fémures, cada Fémur
con su Rótula y a la vez ésta con un segmento Tibia – Peroné. Finalmente el
segmento Tibia – Peroné con un conjunto de huesos del pie como lo son el
calcáneo y el astrágalo y a partir de ahí al resto del pie. No se hace énfasis en la
división del pie, en particular en las falanges, debido a la dificultad existente para
tomar una electro miografía en los músculos que se encuentran sobre esta
compleja estructura ósea.
ISC-2003-1-27
25
Todos los objetos ya sean rígidos o flexibles se representaran por medio de
cilindros, la gran diferencia se ve en el cambio de color y tamaño que tienen los
objetos flexibles, es decir, los músculos cuando están realizando una acción.
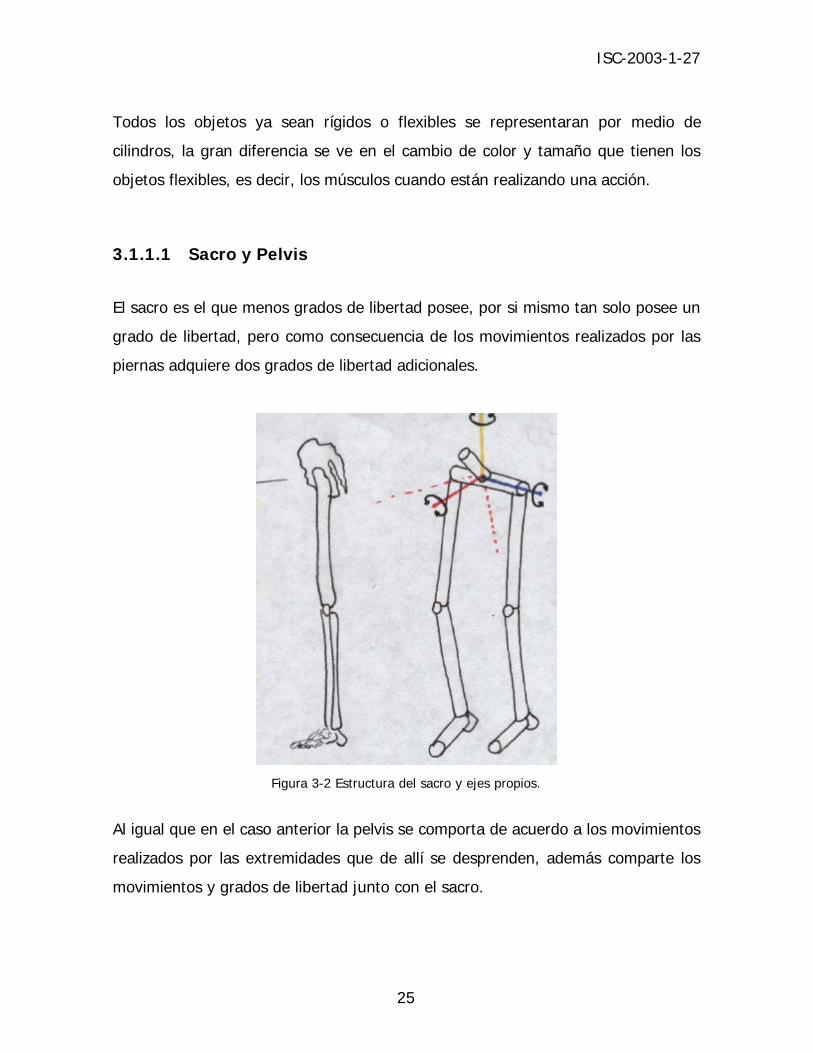
3.1.1.1 Sacro y Pelvis
El sacro es el que menos grados de libertad posee, por si mismo tan solo posee un
grado de libertad, pero como consecuencia de los movimientos realizados por las
piernas adquiere dos grados de libertad adicionales.
Figura 3-2 Estructura del sacro y ejes propios.
Al igual que en el caso anterior la pelvis se comporta de acuerdo a los movimientos
realizados por las extremidades que de allí se desprenden, además comparte los
movimientos y grados de libertad junto con el sacro.
ISC-2003-1-27
26
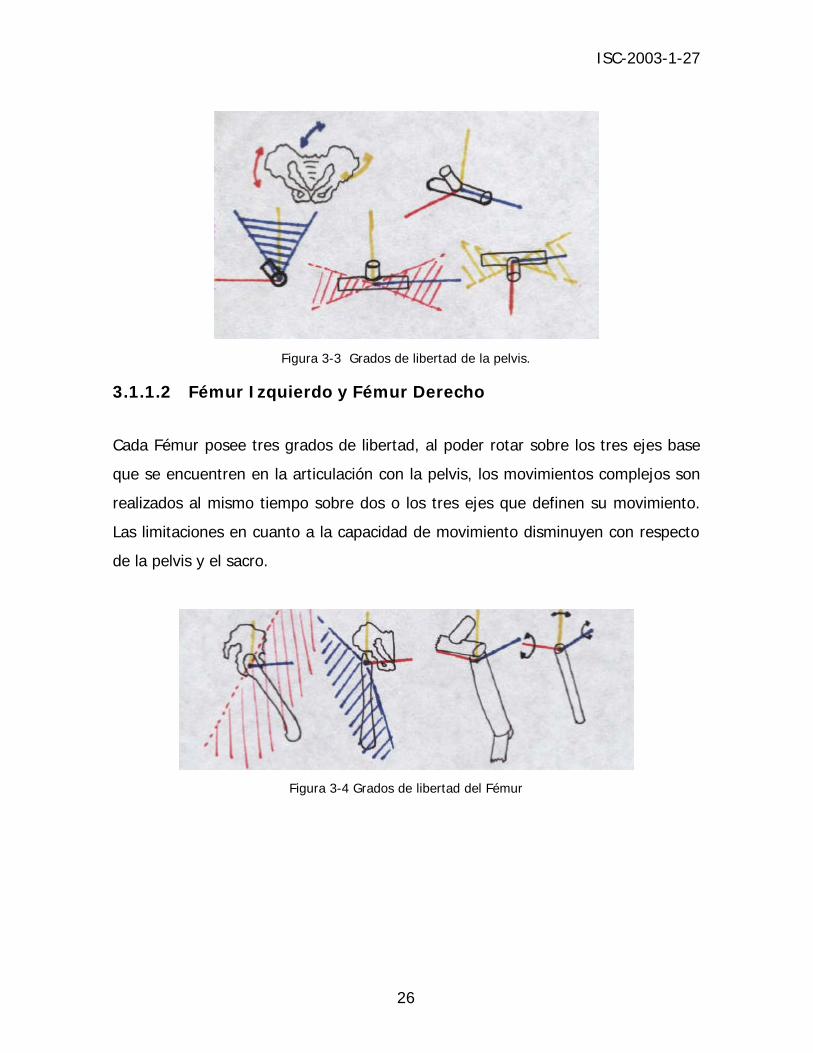
Figura 3-3 Grados de libertad de la pelvis.
3.1.1.2 Fémur Izquierdo y Fémur Derecho
Cada Fémur posee tres grados de libertad, al poder rotar sobre los tres ejes base
que se encuentren en la articulación con la pelvis, los movimientos complejos son
realizados al mismo tiempo sobre dos o los tres ejes que definen su movimiento.
Las limitaciones en cuanto a la capacidad de movimiento disminuyen con respecto
de la pelvis y el sacro.
Figura 3-4 Grados de libertad del Fémur

ISC-2003-1-27
27
3.1.1.3 Tibia - Peroné Izquierdos y Tibia - Peroné Derechos
Al igual que en la descripción del Fémur, tiene la capacidad de rotar sobre sus ejes
base en la articulación con la Rótula y el Fémur. Las limitaciones de movimiento
son similares a las del Fémur.
Figura 3-5 Grados de libertad del segmento Tibia – Peroné
3.1.1.4 Pie Izquierdo y Derecho
En este punto no hay mucho que añadir, a pesar de que al pie mantiene los tres
grados de libertad las limitaciones aumentan con respecto a lo observado en el
Fémur, Tibia y Peroné.
3.2 Modelo Mecánico
El modelo mecánico, es el modelo que representa los posibles movimientos de la
estructura ósea previamente descrita. Dicho modelo resulta del estudio de la
fisiología y anatomía del sistema muscular en conjunto con la anatomía del sistema
ISC-2003-1-27
28
óseo, y debe apoyar a la animación en la medida de la electro miografía añadida a
cada acción muscular. Ya que, es precisamente cada músculo el que dicta que
tipo de movimiento se llevara a cabo y que parte del modelo óseo será el
encargado de efectuarlo.
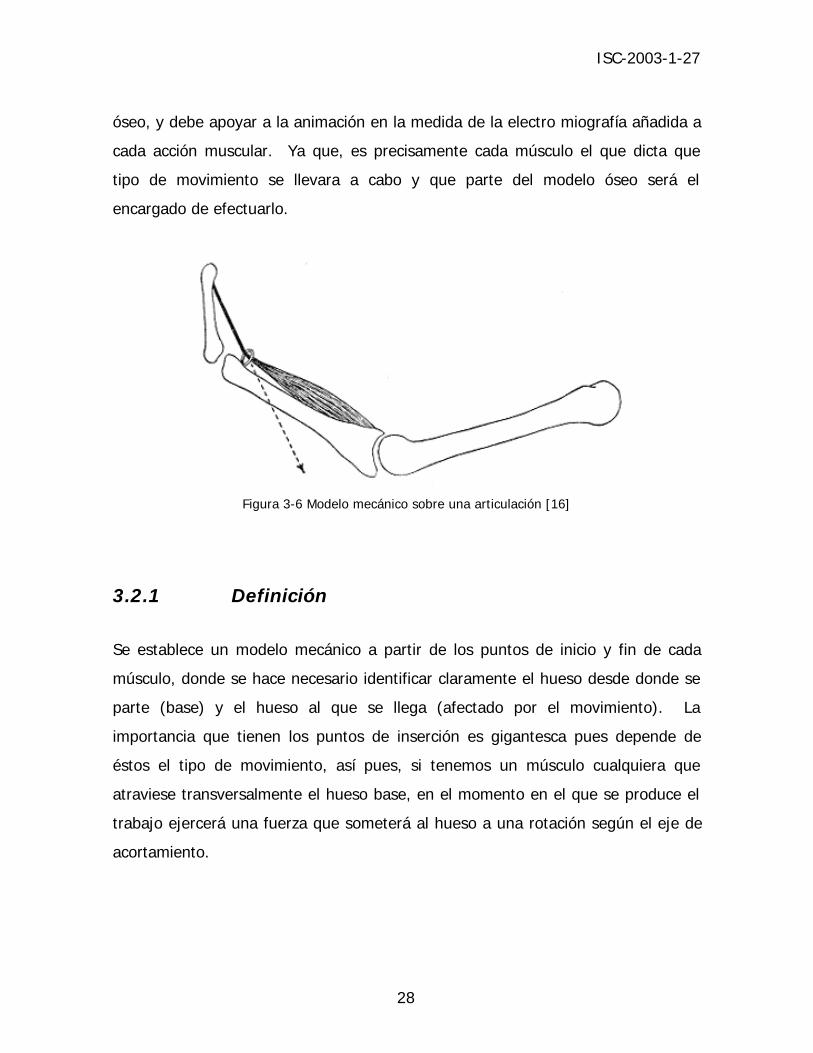
Figura 3-6 Modelo mecánico sobre una articulación [16]
3.2.1 Definición
Se establece un modelo mecánico a partir de los puntos de inicio y fin de cada
músculo, donde se hace necesario identificar claramente el hueso desde donde se
parte (base) y el hueso al que se llega (afectado por el movimiento). La
importancia que tienen los puntos de inserción es gigantesca pues depende de
éstos el tipo de movimiento, así pues, si tenemos un músculo cualquiera que
atraviese transversalmente el hueso base, en el momento en el que se produce el
trabajo ejercerá una fuerza que someterá al hueso a una rotación según el eje de
acortamiento.

ISC-2003-1-27
29
Estos movimientos se rigen claramente por las leyes mecánicas de movimiento
circular.
El resultado de un EMG nos arroja un valor del esfuerzo realizado por el músculo
en un momento dado, lo que tenemos con el EMG es un valor del trabajo
realizado. Entonces es posible estimar un valor de fuerza en el músculo relativa al
valor de trabajo obtenido por medio del EMG: dFW m ·= , donde W es el trabajo del
EMG, mF es la fuerza que ejerce el músculo, y d es el acortamiento del músculo.
Figura 3-7 Relación Trabajo y movimiento.
La relación existente entre la tensión muscular y el movimiento articulado, se
apoya en la física rotacional, en donde una fuerza o mejor dicho torque hace rotar
un elemento, en este caso tenemos un hueso específico y un músculo específico,
tanto el hueso como el músculo cuentan con una masa y longitud que determinan
la forma del movimiento, pero en el caso del músculo no es relevante tenerla en
cuenta, basta con conocer los valores de masa y longitud asociados al hueso para
calcular el torque. En este punto es importante anotar que la fuerza desarrollada
por un músculo sobre un hueso es bastante ya que los puntos de apoyo o

ISC-2003-1-27
30
inserción que hacen que éste gire, por lo general se ubican cerca del centro de la
rotación lo cual implica un mayor esfuerzo por parte del músculo. En general la
ecuación normal de torques funciona: mFr ×=τ donde τ es el torque, r es el vector
del punto donde se aplica la fuerza y mF es la fuerza muscular aplicada.
Figura 3-8 Torques y formas de movimiento
3.2.2 La acción muscular
La acción muscular se define como el trabajo que un músculo realiza sobre un
hueso particular para generar movimiento. En este caso la acción muscular esta
dictada por el valor resultante de la electro miografía sobre el músculo. De
acuerdo a cada valor se obtiene la magnitud del movimiento generado y
dependiendo de cual músculo fue el que realizó el trabajo se presenta el
movimiento. Por ejemplo si se toma como el músculo a analizar el femoral recto y
se tiene la electro miografía del esfuerzo realizado por éste en la marcha normal,
con los valores del EMG se sabe la rapidez y el valor del trabajo del músculo en el
movimiento pero esto no es suficiente para determinar cuál fue el movimiento que
ISC-2003-1-27
31
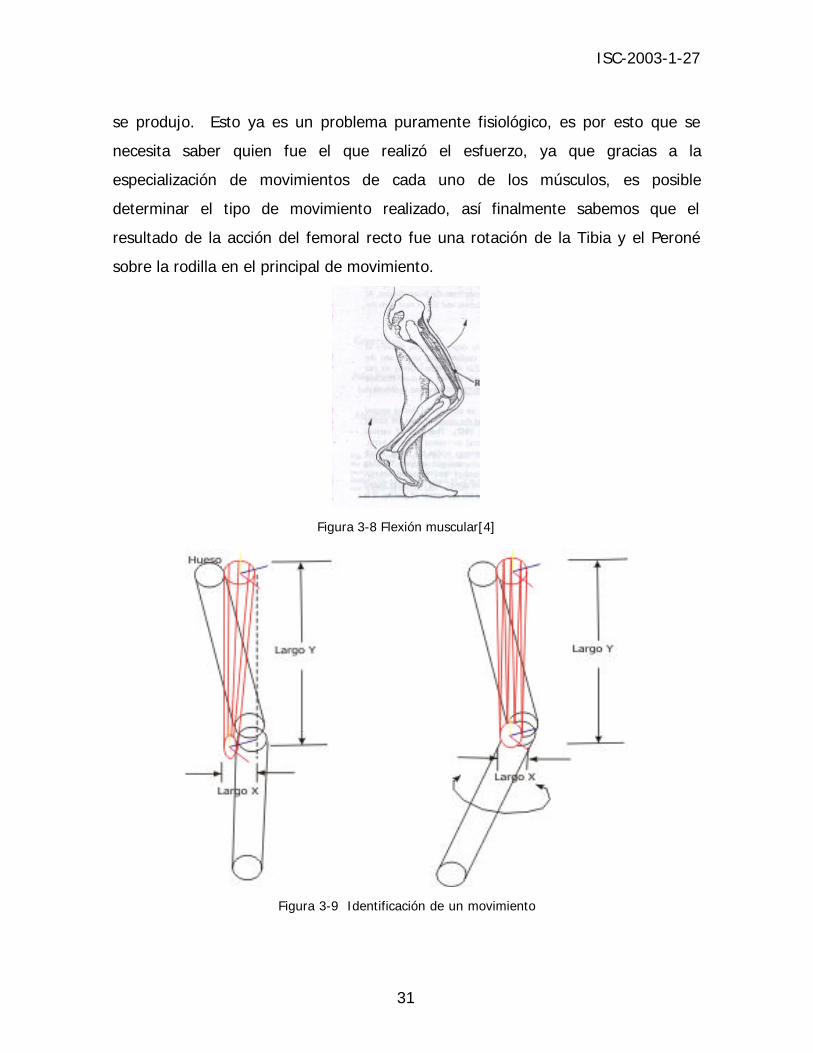
se produjo. Esto ya es un problema puramente fisiológico, es por esto que se
necesita saber quien fue el que realizó el esfuerzo, ya que gracias a la
especialización de movimientos de cada uno de los músculos, es posible
determinar el tipo de movimiento realizado, así finalmente sabemos que el
resultado de la acción del femoral recto fue una rotación de la Tibia y el Peroné
sobre la rodilla en el principal de movimiento.
Figura 3-8 Flexión muscular[4]
Figura 3-9 Identificación de un movimiento

ISC-2003-1-27
32
Entonces cada acción muscular de cada músculo es encargada de un movimiento
realizado por la estructura ósea, pero recordemos que en ocasiones hay más de un
músculo en que se apoya un movimiento ya sean grupos de músculos sinérgicos o
antagónicos.
3.2.3 Movimiento del Aparato Locomotor
Conociendo ya cual es el mecanismo por el cual se da movimiento a un segmento
óseo gracias al trabajo de un músculo, no se debe olvidar que hay mas de un
músculo que tiene conexión con el segmento que está rotando. Una de las
grandes dificultades es mantener unidos el segmento óseo y los músculos pues
una simple rotación no solo afecta el segmento sino que también rota varias partes
de muchos otros músculos que están sujetos a él.
La solución a este problema esta en la definición de la estructura 3D de cada
músculo y radica en calcular que tanto debo rotar y en que eje para mantener la
estructura del aparato.
3.3 Método de Control de Movimiento
El método de control de movimiento se encarga de hacer la animación tanto de la
estructura ósea como del sistema muscular. El método está apoyado en la física y
mecánica Newtoniana, es así como se generan fórmulas generales para cada
movimiento específico según los grados de libertad de la estructura ósea.
ISC-2003-1-27
33
El método comienza por calcular el valor de la rotación del segmento óseo
afectado, luego de obtener dicho valor procede a calcular cual será la variación de
los demás objetos que se encuentran unidos al segmento para mantener la
visualización acorde con el esquema del aparato locomotor. Cada rotación se hace
teniendo en cuenta sobre cual de los ejes se produjo el movimiento.
Como ha de notarse es un proceso determinístico en el cual se divisan claramente
las opciones existentes para la animación, las cuales son rotación independiente de
cada segmento óseo teniendo en cuenta la jerarquía existente en las
extremidades, es decir, si roto el Fémur 5 grados tanto el segmento Tibia – Peroné
como el pie rotaran los 5 grados conjuntamente con el Fémur.
Para hacer realista el la acción del músculo sobre un segmento particular es
necesario calcular la aceleración con la que el músculo intenta tetanizarse porque
aunque la activación sea lineal la suma de pulsos hasta llegar al tétanos acelera la
acción llevada a cabo, entonces el incremento del volumen y el tono no son
lineales sino acelerados y es necesario tener en cuenta esta característica para
realizar una animación apropiada.
Los movimientos se determinan por las ecuaciones características de movimiento
circular y aceleración angular, en cuanto a los huesos y por las ecuaciones de
movimiento rectilíneo y de resortes, en cuanto a los músculos. Sin embargo el
planteamiento correcto de las ecuaciones es vital para el buen funcionamiento de
la animación. De no tener en cuenta los detalles del modelo se pueden esperar
errores como descoordinación en la visualización de los elementos.

ISC-2003-1-27
34
44 IImmpplleemmeennttaacciióónn
Con un esquema de control de movimiento claro, como el que se describe en el
capítulo anterior se busca generar movimiento mediante una función que recoja un
valor de esfuerzo realizado junto con las características propias del músculo para
arrojar como resultado una animación acorde con las características del
movimiento. La implementación se lleva a cabo teniendo en mente algunos
requerimientos funcionales al igual que no funcionales y partiendo de la única
fuente de información variable que posee la herramienta que es un archivo de
texto con los valores del EMG
4.1 Requerimientos Funcionales
Los Requerimientos funcionales son:
• Animación
• Fácil Interacción
• Carga dinámica de electro miografías
• Visualización
• Resultados en archivos gráficos

ISC-2003-1-27
35
4.1.1 Animación
La animación es el foco central de este trabajo, pues se espera que la animación
sea acorde con la recolección de datos hecha por la electro miografía.
4.1.2 Fácil Interacción
Presentación de una interfaz amigable que guíe al usuario en el trabajo que quiere
realizar.
4.1.3 Carga Dinámica de electro miografías
Permitir al usuario la carga de distintas electro miografías en el momento en el que
así se requiera para dar adaptabilidad a la herramienta.
4.1.4 Visualización
Permitir al usuario navegar dentro del escenario de animación.
• Realización de acercamientos
• Rotaciones alrededor del modelo en distintos ejes
4.1.5 Resultados en archivos gráficos
Permitir al usuario guardar los resultados del estudio comparativo de las electro
miografías en archivos gráficos como los mapas de bytes. (bitmaps).

ISC-2003-1-27
36
4.2 Requerimientos No Funcionales
Conociendo las herramientas similares que posee el Instituto, el lenguaje en el que
fueron desarrolladas y al alcance y evolución que deben tener hacia el futuro, se
evidencian los siguientes requerimientos.
4.2.1 Programa multiplataforma Linux o Windows
La idea de hacer el software multiplataforma para Linux y Windows son: las
ventajas que tiene el uso de software libre (Linux), lo cual hace que bajen algunos
costos en cuanto al uso de la herramienta, la existencia de máquinas con sistema
operativo Windows operando actualmente, y la posibilidad de hacer este tipo de
estudios en lugares distantes sin que se presente un riesgo alto de
incompatibilidad de los sistemas.
El uso de C++ como lenguaje de programación por su versatilidad y porque las
librerías que se usan están disponibles para este poderoso lenguaje.
4.2.2 Requiere la instalación de OpenGL en Windows oMesaGL en Linux
Es necesario incluir las librerías gráficas que en el caso de Windows es OpenGL, y
en Linux MesaGL las cuales se encargan de toda la lógica de algoritmos que
requieren los objetos gráficos de la escena, el manejo de luces, el manejo de
múltiples visualizaciones y la rápida creación de objetos tridimensionales básicos.
La elección de OpenGL no fue difícil pues la herramienta es la más usada en el
desarrollo de software gráfico. [19]
ISC-2003-1-27
37
4.2.3 FLTK, Fast Light Tool Kit
Pensando en la fácil interacción que se requiere y la característica de ser
multiplataforma se elige FLTK como la librería que brinda el manejo de todo tipo
de Widgets que modelan de manera práctica el comportamiento que seguirá la
herramienta. Además de las anteriores características se toma en cuenta la
integración que tiene con OpenGL, para agilizar el proceso de interacción entre la
lógica del programa y la interfaz gráfica de manejo del mismo. [14]
4.2.4 Coin
Coin es una librería basada en Inventor que simplifica el manejo de objetos
brindando clases que contienen la definición de estructuras que son claves en la
animación y simulación de objetos, así como vectores posición y desplazamiento,
operaciones entre vectores como producto punto y producto cruz, entre otras
características que simplifican los cálculos en la lógica que modela el mundo. [20]

ISC-2003-1-27
38
4.3 Diagrama de casos de uso
Figura 4-1 Casos de Uso

ISC-2003-1-27
39
4.4 Diagrama de Clases
Figura 4-2 Diagrama de Clases
ISC-2003-1-27
40
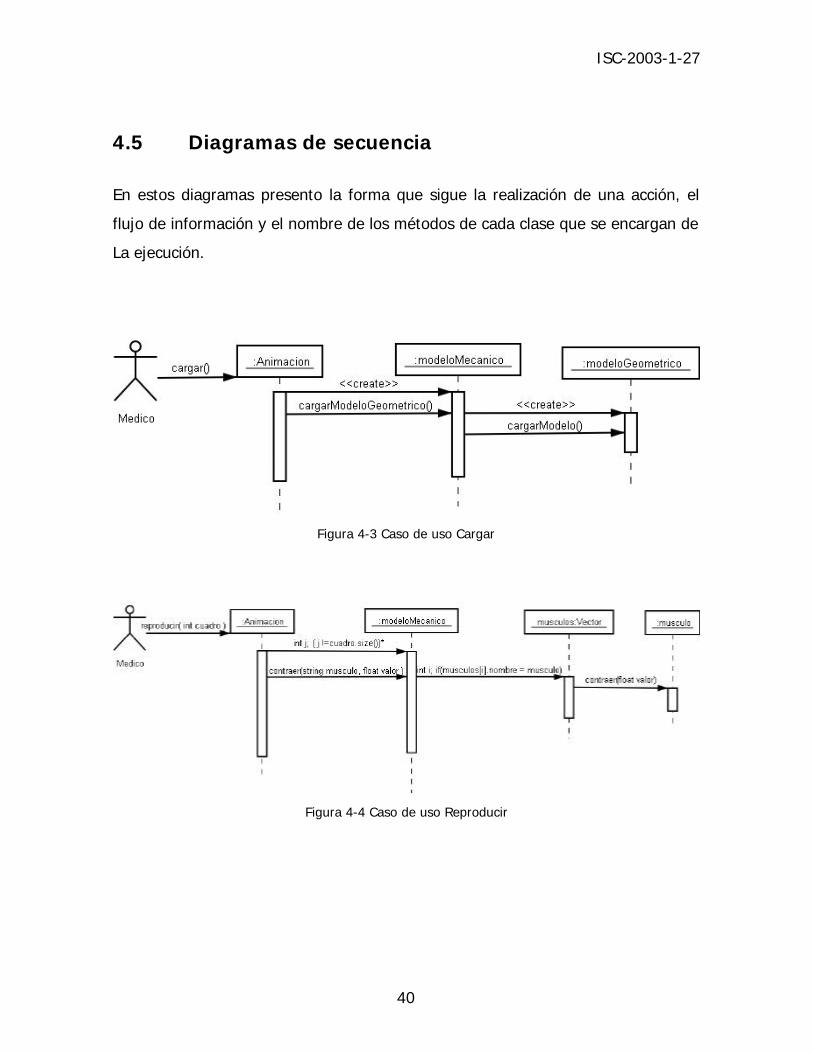
4.5 Diagramas de secuencia
En estos diagramas presento la forma que sigue la realización de una acción, el
flujo de información y el nombre de los métodos de cada clase que se encargan de
La ejecución.
Figura 4-3 Caso de uso Cargar
Figura 4-4 Caso de uso Reproducir

ISC-2003-1-27
41
Figura 4-5 Caso de uso reproducir
Figura 4-6 Caso de uso Parar
Figura 4-7 Caso de uso Pausar

ISC-2003-1-27
42
Figura 4-8 Caso de uso Adelantar
Figura 4–9 Caso de uso Atrasar
Figura 4–10 Caso de uso Ubicar

ISC-2003-1-27
43
4.6 Diagrama de manejo de interfaz
Figura 4-11 Diagrama de Flujo Manejo de Interfaz
4.7 Como funciona el programa
El programa carga el modelo mecánico y éste a la vez carga el modelo geométrico
que serán afectados por la acción de la lectura de la electro miografía. Durante el
proceso de carga se crean la estructura ósea y la estructura del sistema muscular.
Se crean dos modelos puesto que para el análisis se toma el EMG de un paciente
con problemas y se compara con el EMG de un paciente sano, para poder observar
las diferencias de movimiento existentes entre los ciclos de marcha de cada uno.
Animación
AbrirArchivo
cargar
Listade
músculos
añadir
animar
salir

ISC-2003-1-27
44
Cada modelo es animado independientemente y corren al mismo tiempo, lo cual
no implica que el manejo de uno afecte la reproducción normal del otro, en otras
palabras si es necesario detener o pausar cierta parte especifica de la animación
del movimiento de un paciente, la acción no detiene la reproducción de los dos
modelos sino que se centra en el modelo del cual se hace necesaria la acción y el
otro sigue su reproducción normalmente.
Figura 4-12 Pantalla general de la aplicación
El programa inicia mostrando una barra de reproducción y cuatro ventanas
OpenGL en donde se muestran las animaciones y las gráficas de las electro
miografías realizadas.

ISC-2003-1-27
45
Para comenzar a usar el programa es necesario que el usuario cargue los
resultados de cada electro miografía desde un archivo de texto y lo añada al
usuario específico. El formato del archivo es el siguiente:
0010 126 25 32 86 95
0020 114 58 97 64 146
...
3210 95 42 39 75 83
La primera columna indica el tiempo el cual es tomado en intervalos de 10
milisegundos. Las siguientes 5 columnas son el resultado de la electro miografía
practicada sobre 5 músculos, es decir, hay una columna para el resultado de cada
músculo estudiado.
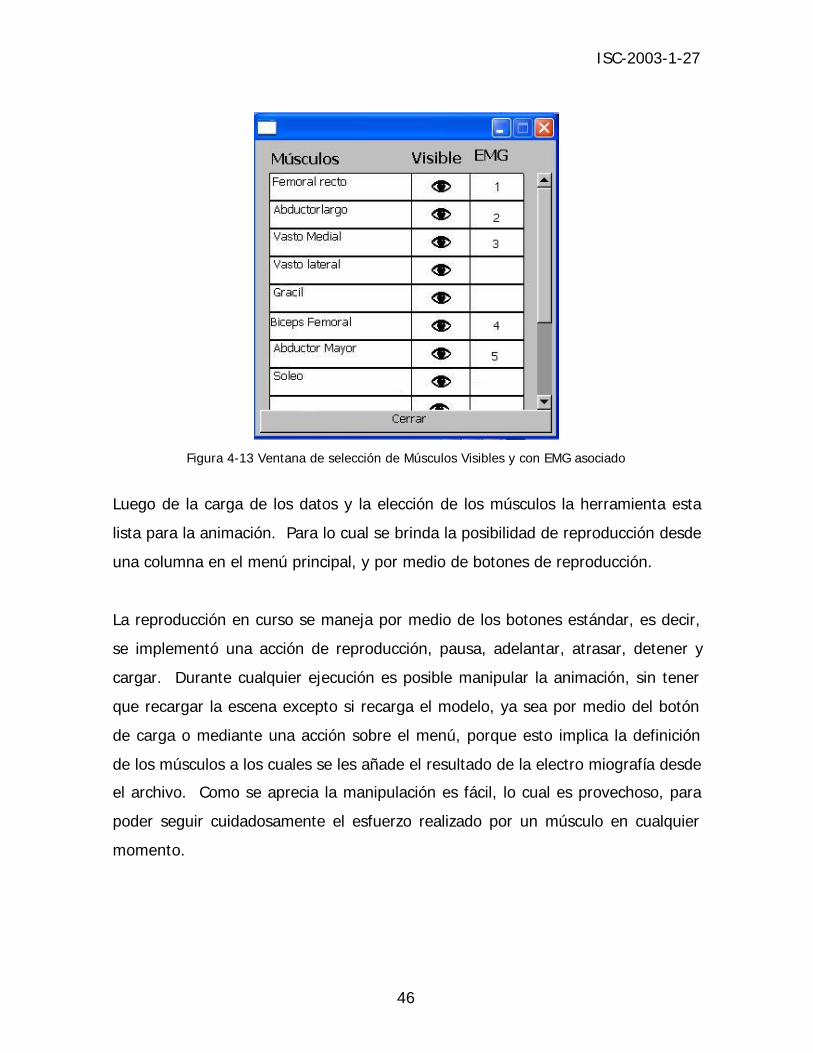
El paso a seguir es elegir los músculos a los que pertenecen las electro miografías
respectivamente, lo que se determina mediante una lista de chequeo, que no solo
indica cuales músculos están siendo analizados sino cuales se están viendo. Por
ejemplo si se elige que los músculos con electro miografía son solo cinco de
aquellos que se encuentran sobre el fémur, es posible que se vean los músculos de
la parte de la pantorrilla aunque no tengan ningún comportamiento añadido
(EMG), de igual forma es posible hacer que desaparezcan y solo observar los
músculos que si tienen el comportamiento o inclusive hacer que algunos de éstos
no se vean. Entonces depende del usuario decidir que músculos quiere observar
durante el proceso de animación.
ISC-2003-1-27
46
Figura 4-13 Ventana de selección de Músculos Visibles y con EMG asociado
Luego de la carga de los datos y la elección de los músculos la herramienta esta
lista para la animación. Para lo cual se brinda la posibilidad de reproducción desde
una columna en el menú principal, y por medio de botones de reproducción.
La reproducción en curso se maneja por medio de los botones estándar, es decir,
se implementó una acción de reproducción, pausa, adelantar, atrasar, detener y
cargar. Durante cualquier ejecución es posible manipular la animación, sin tener
que recargar la escena excepto si recarga el modelo, ya sea por medio del botón
de carga o mediante una acción sobre el menú, porque esto implica la definición
de los músculos a los cuales se les añade el resultado de la electro miografía desde
el archivo. Como se aprecia la manipulación es fácil, lo cual es provechoso, para
poder seguir cuidadosamente el esfuerzo realizado por un músculo en cualquier
momento.

ISC-2003-1-27
47
Para facilitar el análisis es posible manipular la cámara, haciendo permisible la
visualización desde distintos ángulos y acercamientos. Esto se hace necesario
pues la resolución que se da a los modelos es pequeña en el inicio, para que el
usuario pueda ver completamente los músculos en el momento de elegir que es lo
que desea observar, luego de la elección puede acomodar la vista para optimizar
su valoración.
Figura 4-14 Distintas Vistas
Además de la animación, la herramienta brinda la posibilidad de obtener una
gráfica comparativa entre las electro miografías de los pacientes analizados
simultáneamente, una gráfica donde se superponen las representaciones de las
funciones que dictan el movimiento de cada uno de los conjuntos de músculos.

ISC-2003-1-27
48
4-15 Ejemplo gráfica comparativa con un solo EMG.

ISC-2003-1-27
49
55 CCoonncclluussiioonneess yy ttrraabbaajjooss ffuuttuurrooss
La herramienta fue hecha como un modelo básico del funcionamiento conjunto del
sistema óseo y muscular para dar una visión global del comportamiento del
aparato locomotor.
A pesar del bajo detalle que tiene, y la poca fiabilidad de los datos que brinda la
electro miografía, es esta precisamente la única forma existente de medir cuando
una deficiencia en el movimiento es realmente producto de un problema neuronal.
Pero esta poca fiabilidad se supera haciendo la comparación entre electro
miografías de un paciente con problemas contra las de un paciente sano con una
formación muscular y adiposa similar, haciendo posible una valoración más eficaz.
Es necesario poder contar con herramientas que permitan analizar el
comportamiento de los individuos y con herramientas que permitan sustituir el
examen físico por un examen digital que se basa completamente en el examen
físico pero que cuenta con la ventaja de manipulación y repetición que no se
tienen con el examen presencial, pues es riesgoso para el paciente repetir el
examen, ya que dependiendo del trauma que éste tenga, las repeticiones lo
afectarán y en algunos casos empeorarán su padecimiento.

ISC-2003-1-27
50
La animación como la mayoría de métodos de visualización y valoración que están
integradas a los sistemas informáticos tienen muchas formas de lograrse. Es
justamente la valoración precisa de los modelos de animación la que nos permite
ver las ventajas y desventajas presentes. La escogencia de un buen modelo no
depende únicamente de la visualización que se quiera representar sino de las
propiedades mismas de los objetos. Como se ve en el desarrollo de esta
herramienta una animación que parte de los esquemas y principios básicos como
el KeyFrame no es suficiente, se hace necesario un modelo tridimensional dadas
las formas, las posiciones y la forma de trabajo de los músculos sobre la estructura
ósea.
El nivel de detalle es importante si se desea un modelo realista, pero el sacrificio
de algunas variable en cuanto al detalle es necesaria para no depender de la
calidad del hardware, es decir, que en algunas ocasiones vale la pena sacrificar un
poco del detalle para ganar en la ejecución en más tipos de máquinas, aún si éstas
no son las más modernas.
5.1 Trabajos Futuros
Aquí se presentan algunas de las posibles opciones de expansión y refinamiento en
las que podría evolucionar la herramienta, no solo en lo que se refiere a su
desarrollo sino en lo que se refiere al diseño. En donde se tienen en cuenta tanto
el nivel de especificación del modelo geométrico y mecánico, como el diseño
grafico de la animación.

ISC-2003-1-27
51
5.1.1 Nivel de detalle en el diseño
El mejoramiento del nivel de detalle se refiere a profundizar más en el modelaje
del sistema muscular; es decir, presentar los cambios más allá del nivel de los
filamentos y tratar de acercarse al máximo al comportamiento que tiene el
músculo desde el sarcómero, dado que es allí donde realmente se produce el
movimiento o acortamiento que caracteriza los músculos esqueléticos.
5.1.2 Nivel de detalle gráfico del aparato locomotor
Aunque la representación por medio de cilindros no es errónea, pues se asemeja
bastante a la anatomía ósea y muscular, es posible mejorar la representación con
modelos del cuerpo humano realizados por herramientas de modelado 3D, los
cuales sean cargados por medio de rutinas de OpenGL y se manejen con la lógica
de movimiento que esta librería brinda, con lo cual se gana en realismo y se
mantiene la lógica del funcionamiento del modelo existente.
5.1.3 Integración completa con el trabajo existente en elInstituto Roosevelt
Aprovechar los avances y herramientas de tracking con las que cuenta el instituto
y crear el modelo óseo siguiendo los puntos de las articulaciones obtenidos por
estos métodos; es decir, hacer más personal y realista la visualización. Con base
en los puntos de las articulaciones escoger y determinar los puntos que definirían
la estructura de cada músculo sobre el esqueleto.
Capturar directamente la electro miografía evitándose el proceso previo de
escritura en un archivo tipo texto, guardar esta información a través del programa,

ISC-2003-1-27
52
y en un formato más elaborado que un archivo de texto, que no obstante presenta
grandes ventajas por su portabilidad y sencillez, presenta riesgos de seguridad y
fiabilidad sobre su contenido.
5.1.4 Persistencia de resultados
Estandarizar la forma en la que se guardan los resultados, no solo generando
gráficas, sino creando archivos con un formato estándar como XML, que cuenta
con normas y definiciones que permiten asegurar la validez de los datos y además
es portable en todos los sistemas operativos.
5.1.5 Esquema de simulación
Avanzar un poco más en el estudio del comportamiento del aparato locomotor, y
aprovechar el modelo del sistema mecánico, proponiendo e implementando
esquemas de simulación que muestren el trabajo realizado por un músculo
especificando los valores necesarios como lo son, masa, longitud, tensión y
velocidad de acortamiento

ISC-2003-1-27
53
66 BBiibblliiooggrraaffííaa
1. William F Ganong, Fisiología Medica, manual moderno, México DF 1990.
2. Robert M Berne, Fisiología, Times Mirror, España 1993
3. Jan Bruckner, The gait workbook: a practical guide to clinical gait analysis,Thorofare, NJ: SLACK, c1998.
4. James R. Cage, The Treatment of Gait Problems in Cerebral Palsy, Mac KeithPr; 1992
5. Jacquelin Perry, Gait Analysis: normal and Pathological function, Thorofare,N.J. SLACK 1992
6. Yuan-cheng Fung, Biomechanics: mechanical properties of living tissues, NewYork: Ed: Springer-Verlag, 1993.
7. Animation Basics, recuperado el 16 de abril de 2002http://www.wellesley.edu/CS/courses/CS215/handouts/01a-animation.html
8. G. Scott Owen, HyperGraph: A project of the ACM SIGGRAPH EducationCommittee, the Hypermedia and Visualization Laboratory, Georgia StateUniversity, and the National Science Foundation, recuperado el 12 de abril de2003 del sitio de ACM SIGGRAPH,http://www.siggraph.org/education/materials/HyperGraph/animation/anim0.htm
9. Musculo Graphics INC. , http://www.musculographics.com/
10. Basic skeletal muscle physiology, recuperado 20 de abril de 2003,http://www.time-to-run.com/physiology/skeletal-muscle/motor.htm
ISC-2003-1-27
54
11. Friedhelm SandBrink MD, Motor Unit Recruitment in EMG, recuperado 20 deabril de 2003,www.emedicine.com/neuro/topic332.htm
12. Muscles, recuperado 10 de abril de 2003http://users.rcn.com/jkimball.ma.ultranet/BiologyPages/M/Muscles.html
13. Booch & Rumbaugh & Jacobson, The Unified Modeling Language, Addison-Wesley, 1999
14. FLTK, Fast Light Tool Kit, recuperado el 21 de abril de 2003http://www.fltk.org/
15. Human Anatomy, recuperado 12 de abril de 2003http://www.innerbody.com/htm/body.html
16. Henry Gray, Anatomy of the human body, recuperado 28 de abril de 2003,http://www.bartleby.com/107/
17. 3D Character Animation Guide, recuperado 25 de mayo de 2003http://www.cyberloonies.com/animation.htm
18. Morgan y Kaufmann, Computer Animation: Algorithms and Techniques, 2001,recuperado 22 de abril de 2003http://www.cis.ohio-state.edu/~parent/book/Modl.html
19. The Industry’s Fundation For High Performance Graphics, OpenGL,recuperado 27 de febrero de 2003http://www.opengl.org/
20. Systems in Motion, Coin 3D, recuperado 19 de marzo de 2003http://www.coin3d.org/


















