modelado de motor
2
UNIVERSIDAD NACIONAL DE INGENIER ´ IA - FIM- MT 221C/D Ingenier´ ıa de Control TEMA: MOTOR DC M´ aquina s de corrien te cont´ ınua son bastan te usadas en sistemas de control en lazo cerrado, en particular para el control de velocidad y torque. Existen m´aquinas de diversos tama˜ nos, comenz ando a par tir de unos cua nt os Watts –acc iona dos por amplificadore s ele ctr´ onicos, a varios cientos de kilowatss –accionados por generadores Ward-Leonard. Servomotores de bajo consumo de potencia se usan a menudo en instrumentaci´ on, particularmente en sistemas de control de aviones, donde limitaciones de peso y espacio requieren de motores que provean el m´ aximo de potencia por unidad de volumen. Un cuerpo conductor que transporta corriente, cuando inmerso en un campo magn´ etico, exp er- imenta una fuerza proporcional a la magnitud del flujo, la corriente, la longitud del conductor y el ´angulo entre el conductor y la direcci´ on del flujo. Cuando el conductor se localiza a una distancia fija de un eje, con respecto al cual puede rotar, se genera un torque proporcional al producto de la fuerza y el radio. En un motor, el torque resultante es la suma de torques pro- ducidos por conductores individualmente. Para un rotor dado las ´ unicas dos cantidades que se pueden manipular son la corriente de armadura y el flujo. Luego, existen dos modos de operaci´on de un motor DC: a) modo por armadura controlada y b) modo por campo controlado. Control por armadura En el motor DC de armadura controlada el campo es excitado de forma separada por una corrien te constante i f a partir de una fuente DC fija. El flujo puede ser escrito como φ = K f i f , K f constante. El torque desarrollado por el motor es proporcional al producto de φ y la corriente en la armadura y la longitud de los conductores. Dado que el campo es asumido constante, el torque desarrollado por el motor se puede expresar como: τ m = K i i a . R a I eq e a i f constant L a (negligible) Figura 1: Modelo de un motor DC de armadura. El torque del motor es usado para accionar el sistema que posee una inercia total I eq . Asumiendo el caso ideal donde el torque entregado es igual a la carga (en la pr´ actica no hay 100% de eficiencia). Entonces: I eq ¨ θ = K i i a . (1) donde θ es la position angular del eje del motor. A medida que la armadur a rota en un campo, ´esta desarrolla un voltaje inducido e b en direc- ci´on opuesta al suministro de armadura. Este voltaje se llama fuerza contra-electromotriz y es proporcional a la velocidad de rotaci´ on ˙ θ y el flujo creado por el campo. Dado que el campo es consta nte, la fuerza contra-e lectromotriz puede ser expre sada como: e b = K b ˙ θ. (2) donde K b es la constante de voltaje del motor. El control de la velocidad del motor se obtiene ajustando el voltaje aplicado a la armadura. Su polaridad determina la direcci´ on de rotaci´ on del motor. El diagrama esquem´ atico del sistema motor DC de armadura se presenta en la Fig. 1, donde R a = 1Ω, L a ∼0H , K b = 5V/rad/sec, K i = 5Nm/A, y el momento de inercia efectivo es I eq = 0,1kgm 2 . La fricci´ on y la inercia del engranaje son despre ciable s. Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta: R a i a + K b ˙ θ = e a . (3)
-
Upload
emilio-alberto-oropeza-zurita -
Category
Documents
-
view
218 -
download
0
Transcript of modelado de motor

7/23/2019 modelado de motor
http://slidepdf.com/reader/full/modelado-de-motor 1/2
UNIVERSIDAD NACIONAL DE INGENIERIA - FIM- MT 221C/D Ingenierıa de Control
TEMA: MOTOR DC
Maquinas de corriente contınua son bastante usadas en sistemas de control en lazo cerrado,en particular para el control de velocidad y torque. Existen maquinas de diversos tamanos,comenzando a partir de unos cuantos Watts –accionados por amplificadores electronicos, avarios cientos de kilowatss –accionados por generadores Ward-Leonard. Servomotores de bajoconsumo de potencia se usan a menudo en instrumentaci on, particularmente en sistemas decontrol de aviones, donde limitaciones de peso y espacio requieren de motores que provean elmaximo de potencia por unidad de volumen.Un cuerpo conductor que transporta corriente, cuando inmerso en un campo magnetico, exper-imenta una fuerza proporcional a la magnitud del flujo, la corriente, la longitud del conductory el angulo entre el conductor y la direccion del flujo. Cuando el conductor se localiza a unadistancia fija de un eje, con respecto al cual puede rotar, se genera un torque proporcional alproducto de la fuerza y el radio. En un motor, el torque resultante es la suma de torques pro-ducidos por conductores individualmente. Para un rotor dado las unicas dos cantidades que sepueden manipular son la corriente de armadura y el flujo. Luego, existen dos modos de operacion
de un motor DC: a)modo por armadura controlada y b) modo por campo controlado.
Control por armadura
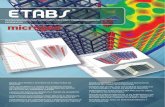
En el motor DC de armadura controlada elcampo es excitado de forma separada poruna corriente constante if a partir de unafuente DC fija. El flujo puede ser escritocomo φ = K f if , K f constante. El torquedesarrollado por el motor es proporcional alproducto de φ y la corriente en la armadura
y la longitud de los conductores. Dado queel campo es asumido constante, el torquedesarrollado por el motor se puede expresarcomo:
τ m = K iia.
Ra
I eq
ea
i f constant
La (negligible)
Figura 1: Modelo de un motor DC de armadura.
El torque del motor es usado para accionar el sistema que posee una inercia total I eq. Asumiendoel caso ideal donde el torque entregado es igual a la carga (en la pr actica no hay 100% deeficiencia). Entonces:
I eq θ = K iia. (1)
donde θ es la position angular del eje del motor.
A medida que la armadura rota en un campo, esta desarrolla un voltaje inducido eb en direc-cion opuesta al suministro de armadura. Este voltaje se llama fuerza contra-electromotriz y esproporcional a la velocidad de rotacion θ y el flujo creado por el campo. Dado que el campo esconstante, la fuerza contra-electromotriz puede ser expresada como:
eb = K b θ. (2)
donde K b es la constante de voltaje del motor.El control de la velocidad del motor se obtiene ajustando el voltaje aplicado a la armadura. Supolaridad determina la direccion de rotacion del motor. El diagrama esquematico del sistemamotor DC de armadura se presenta en la Fig. 1, donde Ra = 1Ω, La ∼ 0H , K b = 5V/rad/sec,
K i = 5Nm/A, y el momento de inercia efectivo es I eq = 0,1kgm2
. La friccion y la inercia delengranaje son despreciables.Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta:
Raia + K b θ = ea. (3)

7/23/2019 modelado de motor
http://slidepdf.com/reader/full/modelado-de-motor 2/2
Sustituyendo ia de (1) en la ecuacion arriba mostrada y dividiendo ambos lados por I eq resulta:
θ = K iI eq
ea − K b θ
Ra
= K iK bI eqRa
θ + K iI eqRa
ea.
Sea x1 = θ, x2 = θ y u = ea. Luego tomando en cuenta los parametros del sistema, representa-mos la ecuacion arriba mostrada en la forma de espacio de estados.
x1
x2
=
0 10 −250
x1
x2
+
050
u.
Control por campo
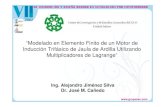
La Fig. 2 muestra el diagra-ma esquematico del motor
DC de campo controladodonde la corriente de laarmadura es mantenidaconstante y el campo essuministrado a partir de unvoltaje ajustable ef .
5 4 0
I N T R O D U C T I O N T O C O N T R O L E N G I N E E R I N G
+
+
e
eff
i
i
f
f
L
Lff
RRff
Iaa
=
=C
Co
on
ns
stt.
.
m
m
J
J
B
B
F i g . A . 1 9 F i e l d c o n t r o l l e d D C m o t o r
Figura 2: Motor DC de campo controlado.
El torque τ desarrollado por el motor es proporcional al flujo creado por la corriente de armadu-ra, la corriente del campo y la longitud de los conductores. Para un motor dado, con corriente
de armadura constante, el torque puede ser expresado como:
τ = K T if , (4)
donde K T es la constante de torque. Este torque es usado para mover la carga de inercia totalJ y para vencer la friccion viscosa. Eso puede ser expresado, despreciando la rigidez torsionaldel eje, como:
τ = J θm + B θm. (5)
Aplicando la ley de voltaje de Kirchoff en el circuito del campo se obtiene:
ef = Rf if + Lf if . (6)
La representacion espacio de estados se obtiene considerando a la posicion angular y su derivadacomo los primeros estados, x1 = θm, x2 = θm, la corriente de campo como el tercer estado,x3 = if , y al voltaje del campo como la entrada u = ef donde la posicion angular se consideracomo la salida y = θm = x1. Luego las matrices correspondientes son:
x1
x2
x3
=
0 1 0
0 −B/J K T /J 0 0 −Rf /Lf
x1
x2
x3
+
0
01/Lf
u
y =
1 0 0
x1
x2
x3
.