
Misiles-03-Resistencia aerodinámica
25
Página 50 Misiles II 3 Resistencia aerodinámica de misiles 3.1 Introducción Se presentará aquí el proceso de cálculo de la resistencia aerodinámica desde un punto de vista práctico de aplicación, habiendo sido los principios desarrollados en las asignaturas de aerodinámica. Se presentarán algunos métodos para cálculos de ciertas componentes del coeficiente de resistencia pero, en general, para la obtención de valores numéricos detallados se deberá acudir a la bibliografía. De todas formas la aplicación de los métodos y los datos aquí presentados da resultados suficientes para el diseño preliminar y selección de conceptos de diseño. Siendo D la resistencia aerodinámica opuesta a la velocidad del misil respecto al aire, se define como coeficiente de resistencia: 2 1 2 V D D S C ρ = (3.1) donde: S = superficie de referencia =área frontal máxima del fuselaje ρ = densidad atmosférica a la altura de que se trate. El coeficiente total D C proviene de la suma de efectos de una serie de fenómenos, así como de la contribución de cada componente física del misil. En el apartado siguiente se efectuara el estudio dividiendo el proceso de acuerdo con la formulación clásica. 3.2 Componentes de la resistencia aerodinámica Las dos componentes básicas de la resistencia aerodinámica son: • Resistencia con ángulo de ataque nulo o "resistencia parásita" ( 0 D ) • Resistencia ocasionada por las fuerzas normales presentes cuando existe un ángulo de ataque ( i D ) Será pues: 0 i D D D = + (3.2) o utilizando los coeficientes de resistencia tal como se definieron en [1](3.1): 0 i D D D C C C + = (1.3) Cada uno de los dos sumandos de la resistencia esta formado por la aportación de las distintas partes del misil. Se consideran las tres partes siguientes como principales suministradoras de fuerzas de resistencia:
-
Upload
librepescador -
Category
Documents
-
view
275 -
download
1
Transcript of Misiles-03-Resistencia aerodinámica
Página 50 Misiles II
3 Resistencia aerodinámica de misiles 3.1 Introducción Se presentará aquí el proceso de cálculo de la resistencia aerodinámica desde un punto de vista práctico de aplicación, habiendo sido los principios desarrollados en las asignaturas de aerodinámica.
Se presentarán algunos métodos para cálculos de ciertas componentes del coeficiente de resistencia pero, en general, para la obtención de valores numéricos detallados se deberá acudir a la bibliografía. De todas formas la aplicación de los métodos y los datos aquí presentados da resultados suficientes para el diseño preliminar y selección de conceptos de diseño.
Siendo D la resistencia aerodinámica opuesta a la velocidad del misil respecto al aire, se define como coeficiente de resistencia:
21
2V
DD
SC
ρ= (3.1)
donde:
S = superficie de referencia =área frontal máxima del fuselaje
ρ = densidad atmosférica a la altura de que se trate.
El coeficiente total DC proviene de la suma de efectos de una serie de fenómenos, así como de la contribución de cada componente física del misil. En el apartado siguiente se efectuara el estudio dividiendo el proceso de acuerdo con la formulación clásica.
3.2 Componentes de la resistencia aerodinámica Las dos componentes básicas de la resistencia aerodinámica son:
• Resistencia con ángulo de ataque nulo o "resistencia parásita" ( 0D )
• Resistencia ocasionada por las fuerzas normales presentes cuando existe un ángulo de ataque ( iD )
Será pues:
0 iD D D= + (3.2)
o utilizando los coeficientes de resistencia tal como se definieron en [1](3.1):
0 iD DDC C C+= (1.3)
Cada uno de los dos sumandos de la resistencia esta formado por la aportación de las distintas partes del misil. Se consideran las tres partes siguientes como principales suministradoras de fuerzas de resistencia:

Página 51 Misiles II
− Fuselaje
− Alas
− Controles
Se estudian a continuación las resistencias parásita e inducida generadas por las distintas partes del misil, así como la suma del conjunto.
3.3 Resistencia con ángulo de ataque nulo
3.3.1 General
Cuando el ángulo de ataque es nulo la resistencia parásita, 0D , estará dirigida según el eje del misil dadas las características de simetría del mismo, que hacen que la línea de sustentación nula coincida con dicho eje.
Si el ángulo de ataque no es nulo, la resistencia aerodinámica se opone a la velocidad y formara el ángulo de ataque con el eje del misil. En este caso estará compuesta los dos sumandos: 0D y iD .
La resistencia parásita esta compuesta de tres sumandos.
0 f b FD D D D= + + (3.4)
o también
0 f b FD D D DC C C C= + + (3.5)
Siendo:
− fD es la resistencia frontal y es debido a la diferencia de presiones en sentido axial a lo largo de las superficies de frontales y laterales del misil.
En supersónico, vuelo normal del misil, su origen principal son las diferencias de presiones a ambos lados de las ondas de choque que aparecen en ojiva, alas, etc., y alcanza valores importantes sobre todo en cuerpos con proa roma. Por eso en supersónico esta componente se denomina resistencia de onda y se representa por wD .
En subsónico un valor es mucho más pequeño, y en bastantes casos despreciable frente a los otros dos sumandos.
− bD es la resistencia de base. Se debe a la fuerte depresión que se crea detrás de un cuerpo cuya superficie final en la cola es perpendicular a la dirección de alcance.
Un cuerpo fuselado totalmente no tiene esa superficie final plana transversal, y su resistencia de base será nula.
En un misil es preciso normalmente que el fuselaje termine con una sección plana plano transversal, que contiene el área de salida de gases, y se creara una importante depresión (tanto en subsónico como en supersónico), dando lugar a dicha resistencia de base.
Página 52 Misiles II
A la suma de la resistencia frontal más la de la base se la denomina resistencia de presión o de forma.
− FD es la resistencia de fricción, y se crea por el rozamiento de las capas de aire como fluido viscoso dentro de la capa límite, al existir en esa capa un fuerte gradiente de velocidades en dirección normal ala superficie del cuerpo.
3.3.2 Resistencia frontal
Se analiza esta fuerza para las componentes principales del misil.
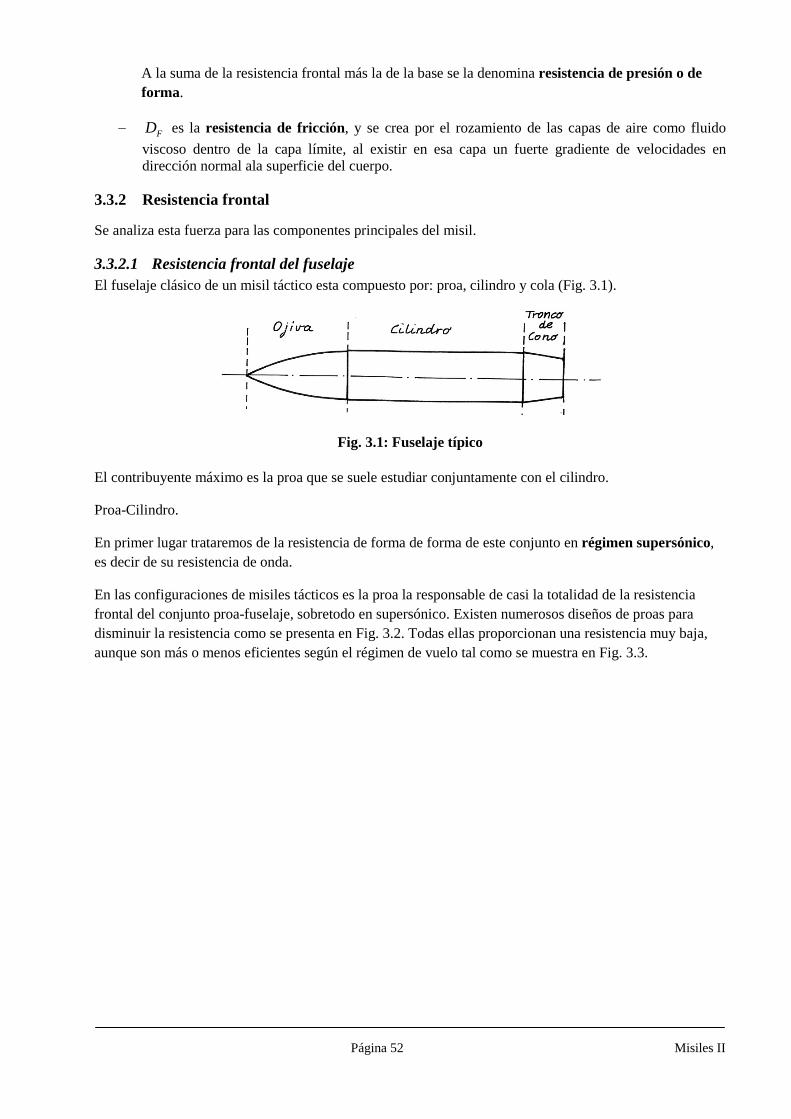
3.3.2.1 Resistencia frontal del fuselaje El fuselaje clásico de un misil táctico esta compuesto por: proa, cilindro y cola (Fig. 3.1).
Fig. 3.1: Fuselaje típico
El contribuyente máximo es la proa que se suele estudiar conjuntamente con el cilindro.
Proa-Cilindro.
En primer lugar trataremos de la resistencia de forma de forma de este conjunto en régimen supersónico, es decir de su resistencia de onda.
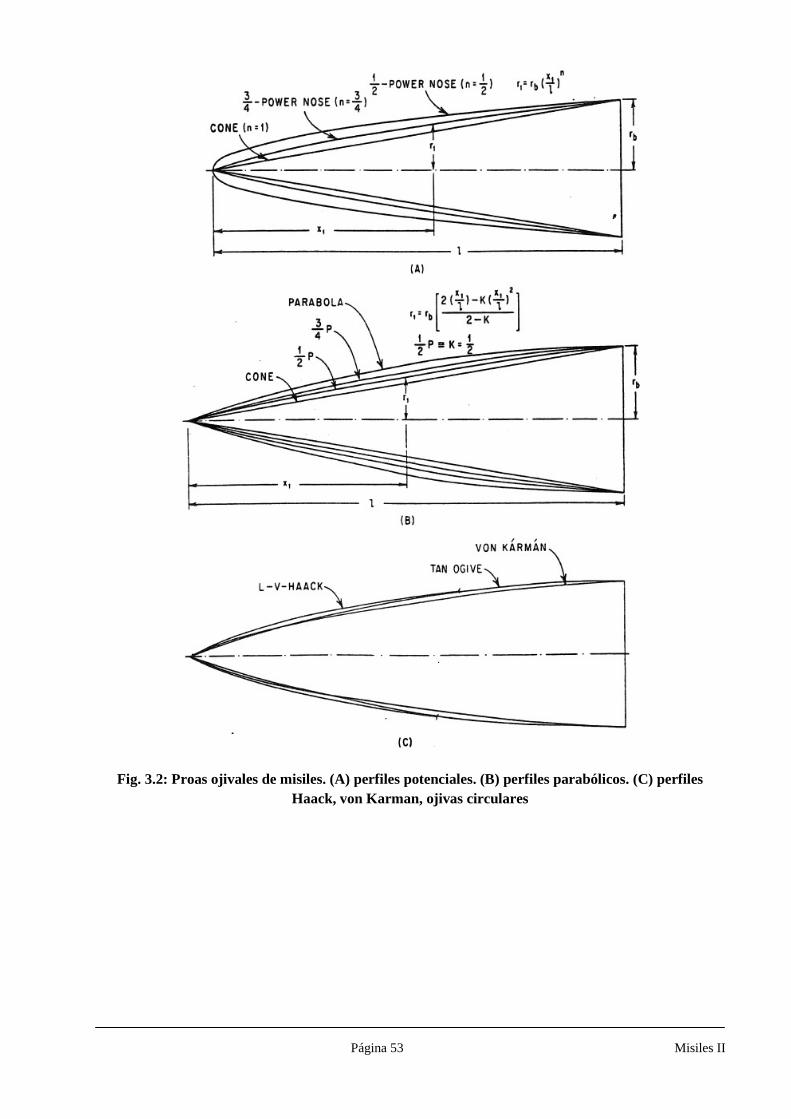
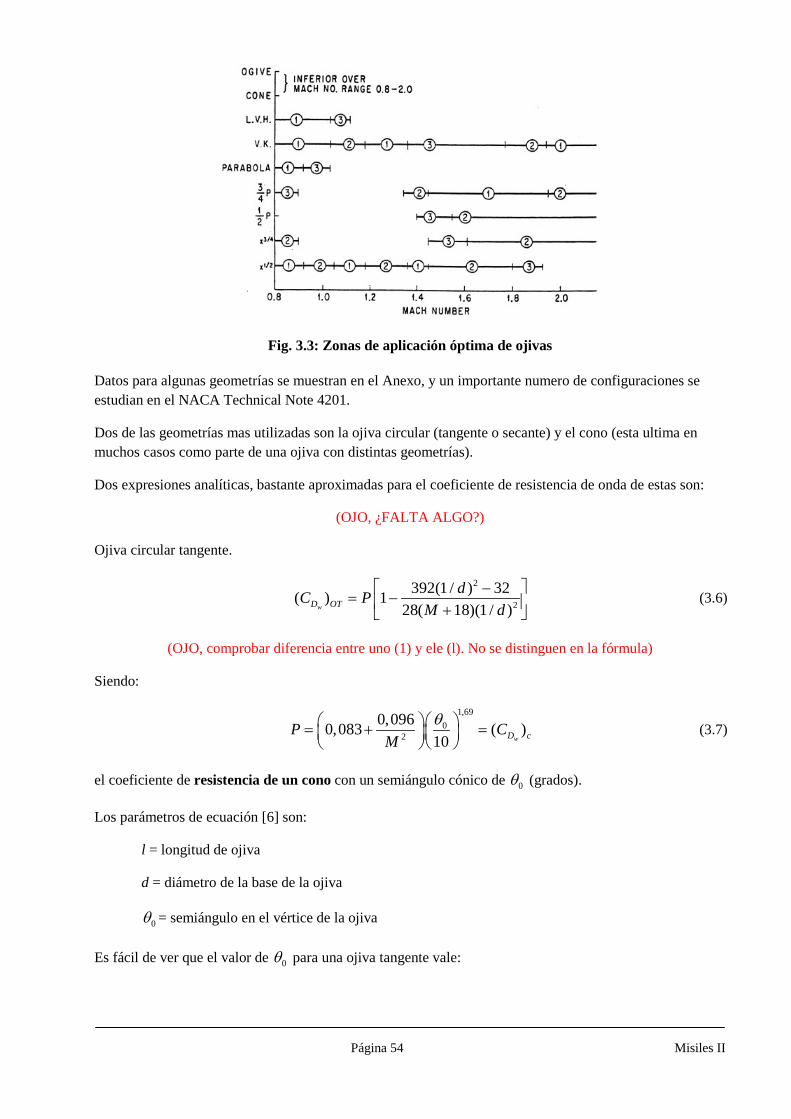
En las configuraciones de misiles tácticos es la proa la responsable de casi la totalidad de la resistencia frontal del conjunto proa-fuselaje, sobretodo en supersónico. Existen numerosos diseños de proas para disminuir la resistencia como se presenta en Fig. 3.2. Todas ellas proporcionan una resistencia muy baja, aunque son más o menos eficientes según el régimen de vuelo tal como se muestra en Fig. 3.3.
Página 53 Misiles II
Fig. 3.2: Proas ojivales de misiles. (A) perfiles potenciales. (B) perfiles parabólicos. (C) perfiles Haack, von Karman, ojivas circulares
Página 54 Misiles II
Fig. 3.3: Zonas de aplicación óptima de ojivas
Datos para algunas geometrías se muestran en el Anexo, y un importante numero de configuraciones se estudian en el NACA Technical Note 4201.
Dos de las geometrías mas utilizadas son la ojiva circular (tangente o secante) y el cono (esta ultima en muchos casos como parte de una ojiva con distintas geometrías).
Dos expresiones analíticas, bastante aproximadas para el coeficiente de resistencia de onda de estas son:
(OJO, ¿FALTA ALGO?)
Ojiva circular tangente.
2
2
392(1 / ) 32( ) 128( 18)(1 / )wD OT
dC PM d
−= − +
(3.6)
(OJO, comprobar diferencia entre uno (1) y ele (l). No se distinguen en la fórmula)
Siendo:
1,69
02
0,0960,083 ( )10 wD cP C
Mθ = + =
(3.7)
el coeficiente de resistencia de un cono con un semiángulo cónico de 0θ (grados).
Los parámetros de ecuación [6] son:
l = longitud de ojiva
d = diámetro de la base de la ojiva
0θ = semiángulo en el vértice de la ojiva
Es fácil de ver que el valor de 0θ para una ojiva tangente vale:

Página 55 Misiles II
0 ) 2arctg( / 2 )( OT d lθ = (3.8)
que es el doble del semiángulo de un cono de la misma esbeltez.
0 ) arctg( /( 2 )CO d lθ = (3.9)
Los coeficientes de resistencia de las expresiones [6] y [7] están referidos al área de la base de la ojiva, o del cono.
En un misil guiado por infrarrojos, debido a los fenómenos de refracción, no es posible utilizar ojivas como las anteriores, sino que es preciso utilizar proas hemisféricas, que a veces se pueden combinar con secciones troncocónicas para disminuir su resistencia, que es muy elevada.
En la Fig. 3.4 se presenta el aspecto de diversas ojivas troncocónicas, con la punta hemisférica de distintos diámetros. En la Fig. 3.5 se indica el coeficiente de resistencia para ojivas cónicas con distintos grados de redondeo hecho a base de semiesferas.
Fig. 3.4: Geometría de proas cónicas redondeadas
Página 56 Misiles II
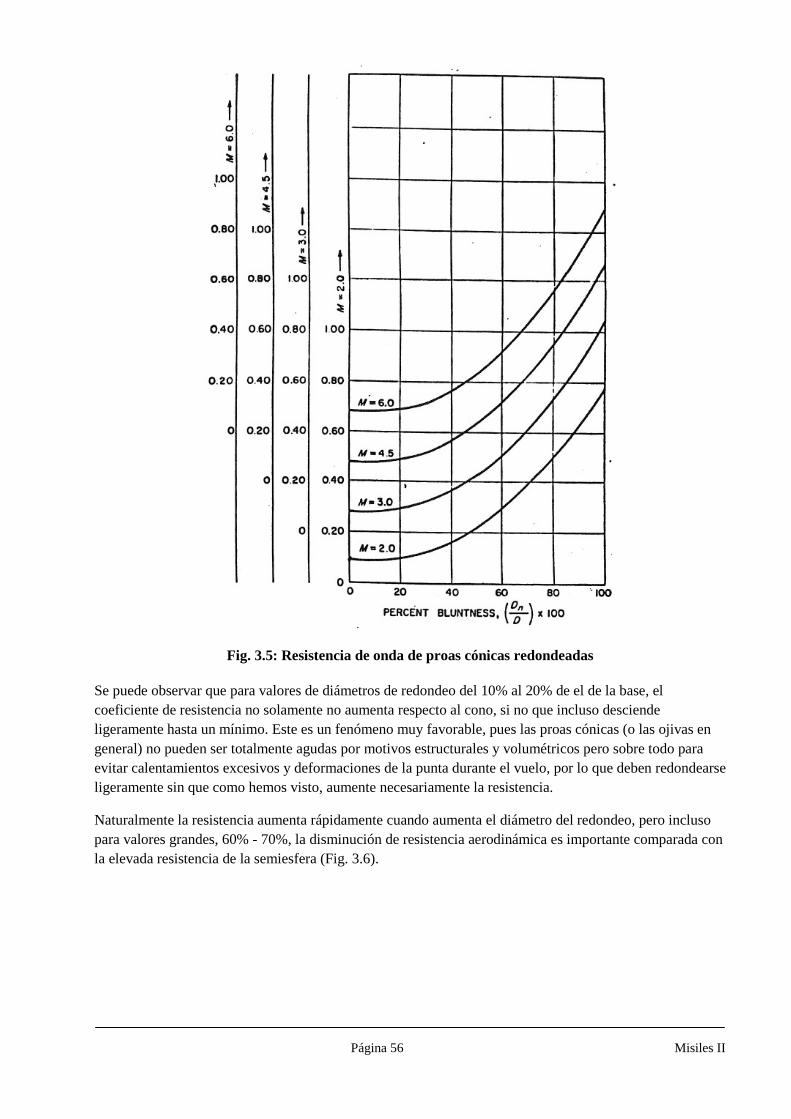
Fig. 3.5: Resistencia de onda de proas cónicas redondeadas
Se puede observar que para valores de diámetros de redondeo del 10% al 20% de el de la base, el coeficiente de resistencia no solamente no aumenta respecto al cono, si no que incluso desciende ligeramente hasta un mínimo. Este es un fenómeno muy favorable, pues las proas cónicas (o las ojivas en general) no pueden ser totalmente agudas por motivos estructurales y volumétricos pero sobre todo para evitar calentamientos excesivos y deformaciones de la punta durante el vuelo, por lo que deben redondearse ligeramente sin que como hemos visto, aumente necesariamente la resistencia.
Naturalmente la resistencia aumenta rápidamente cuando aumenta el diámetro del redondeo, pero incluso para valores grandes, 60% - 70%, la disminución de resistencia aerodinámica es importante comparada con la elevada resistencia de la semiesfera (Fig. 3.6).
Página 57 Misiles II
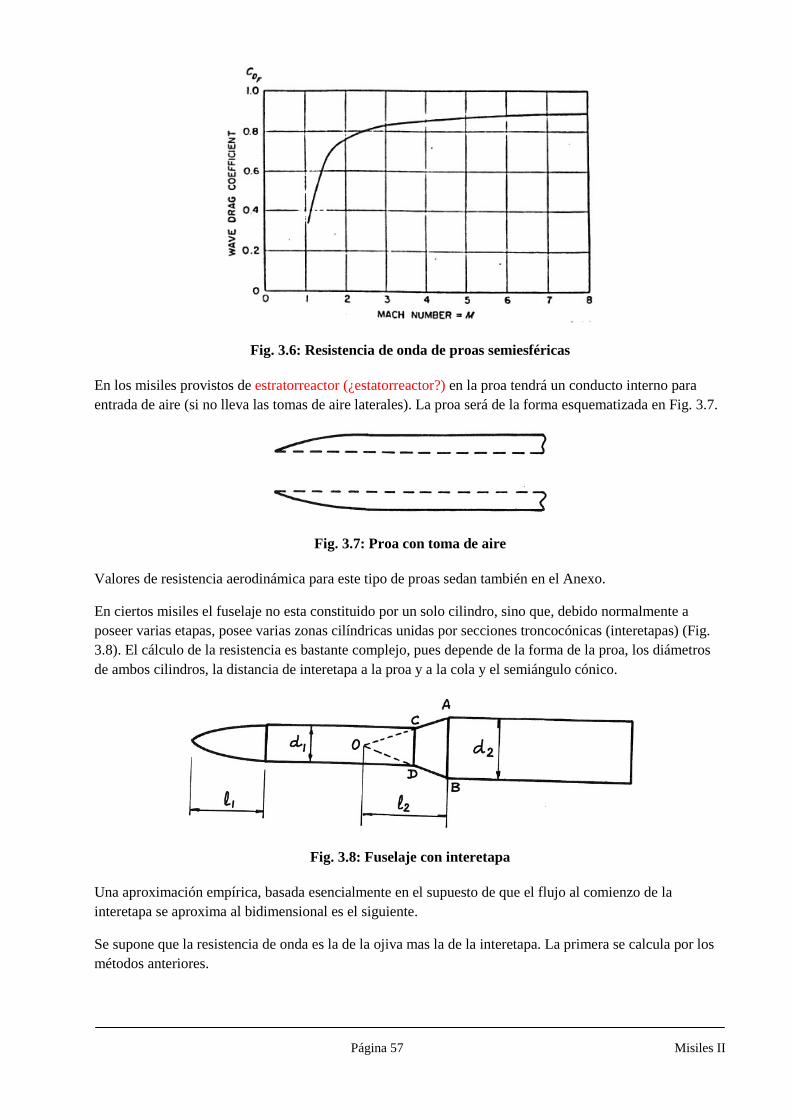
Fig. 3.6: Resistencia de onda de proas semiesféricas
En los misiles provistos de estratorreactor (¿estatorreactor?) en la proa tendrá un conducto interno para entrada de aire (si no lleva las tomas de aire laterales). La proa será de la forma esquematizada en Fig. 3.7.
Fig. 3.7: Proa con toma de aire
Valores de resistencia aerodinámica para este tipo de proas sedan también en el Anexo.
En ciertos misiles el fuselaje no esta constituido por un solo cilindro, sino que, debido normalmente a poseer varias etapas, posee varias zonas cilíndricas unidas por secciones troncocónicas (interetapas) (Fig. 3.8). El cálculo de la resistencia es bastante complejo, pues depende de la forma de la proa, los diámetros de ambos cilindros, la distancia de interetapa a la proa y a la cola y el semiángulo cónico.
Fig. 3.8: Fuselaje con interetapa
Una aproximación empírica, basada esencialmente en el supuesto de que el flujo al comienzo de la interetapa se aproxima al bidimensional es el siguiente.
Se supone que la resistencia de onda es la de la ojiva mas la de la interetapa. La primera se calcula por los métodos anteriores.
Página 58 Misiles II
Para la interetapa se determinará principalmente el coeficiente de resistencia ( )wD CC del cono imaginario
O A B de Fig. 3.8, que estará referido al área A B de diámetro 2d de la base del tronco de cono.
Si llamamos CS al "área mojada" (área exterior) del cono O A B y TCS al "área mojada" del tronco de cono C A B D, el coeficiente de resistencia del tronco de cono, referido al área A B será:
( ) ( )w wD TC D
TCC
C
SC CS
= (3.10)
(OJO, en los apuntes la vuelve a llamar ecuación [8], ya usada)
El área de la ojiva se habrá calculado normalmente referida a su área de base de diámetro 1d , por lo que habrá que referir ambos coeficientes al área de referencia que se utilice para poder sumarlos (en este caso, normalmente se tomara el área de diámetro 2d como referencia).
Como se indicó las formulas y valores que se han dado hasta el momento son validos para 1M ≥ .
Para régimen subsónico la resistencia de onda es despreciable en la mayoría de los casos, pero de todas formas en el Anexo se presentan valores para este coeficiente de cuerpos en subsónico.
Cola del fuselaje.
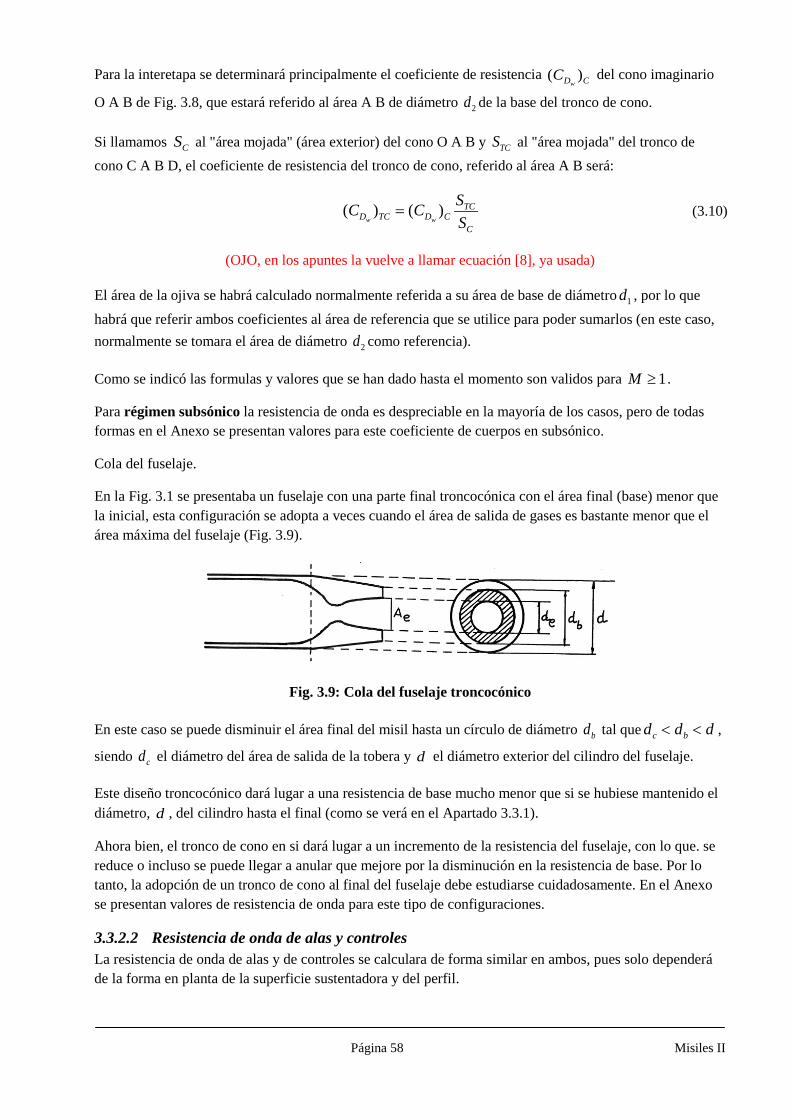
En la Fig. 3.1 se presentaba un fuselaje con una parte final troncocónica con el área final (base) menor que la inicial, esta configuración se adopta a veces cuando el área de salida de gases es bastante menor que el área máxima del fuselaje (Fig. 3.9).
Fig. 3.9: Cola del fuselaje troncocónico
En este caso se puede disminuir el área final del misil hasta un círculo de diámetro bd tal que c bd d d< < ,
siendo cd el diámetro del área de salida de la tobera y d el diámetro exterior del cilindro del fuselaje.
Este diseño troncocónico dará lugar a una resistencia de base mucho menor que si se hubiese mantenido el diámetro, d , del cilindro hasta el final (como se verá en el Apartado 3.3.1).
Ahora bien, el tronco de cono en si dará lugar a un incremento de la resistencia del fuselaje, con lo que. se reduce o incluso se puede llegar a anular que mejore por la disminución en la resistencia de base. Por lo tanto, la adopción de un tronco de cono al final del fuselaje debe estudiarse cuidadosamente. En el Anexo se presentan valores de resistencia de onda para este tipo de configuraciones.
3.3.2.2 Resistencia de onda de alas y controles La resistencia de onda de alas y de controles se calculara de forma similar en ambos, pues solo dependerá de la forma en planta de la superficie sustentadora y del perfil.

Página 59 Misiles II
En la bibliografía se encuentran datos para superficies definidas con los parámetros de Fig. 3.10 y con el perfil "doble cuña" indicado en la misma figura.
Fig. 3.10: Parámetros geométricos de una superficie sustentadora
El valor de 0
( )D wC para configuraciones de alas (o controles) definidas en la Fig. 3.9 se suelen presentar en
función de los siguientes parámetros:
0
2, , tg / 2,( ) ( , )( / )D m A l A A trC f crα β= (3.11)
(OJO, uno o ele)
Refiriéndonos a la Fig. 3.9, los parámetros de ecuación [9] son:
0
2
2
//
/ (alargamiento) superficie EFABCD (superficie de las dos semialas)
1
r
r
w
w
c cm e cA b SS
Mβ
α
=
=
==
=
−
Una aproximación rápida para un ala infinita, sin flecha, con perfil doble cuña simétrica ( 0,5m = ) está dada por la expresión:
2 2
2 2
4 )( 4( /)1 1
rD w
trM
cCM
δ≈=
− − (3.12)
siendo δ el semiángulo del borde de ataque del perfil.
En Fig. 3.11 se indican los factores por los que debería multiplicarse el valor dado en [10], para alas infinitas, con otros perfiles diferentes del de doble cuña.

Página 60 Misiles II
Fig. 3.11: Factores para obtención de resistencia de ondas de alas bidimensionales sin flecha
También se pueden aplicar dichos factores para obtener la resistencia de onda de alas de alargamiento finito, a partir de los datos dados en el Anexo para estas alas con perfil doble cuña simétrico. Ahora bien los resultados serán tanto mas aproximadas cuanto mayor sea el alargamiento, dado que esos factores se derivan de la teoría bidimensional.
3.3.3 Resistencia de base
El concepto de resistencia de base fue explicado en Apartado 3.1. Esta componente de la resistencia en unión de la resistencia de onda (o frontal), se conoce como resistencia de forma o de presión.
La resistencia de base junto con la de fricción constituyen la casi totalidad de la resistencia en régimen subsónico. Sin embargo en régimen supersónico aunque estas componentes son importantes, son superadas por la resistencia de onda (sobre todo en misiles con guiado infrarrojo o en general con proas romas). Como se indico, la resistencia de base proviene de la depresión que se crea detrás de los cuerpos con secciones terminales planas (no fuseladas).
Esta resistencia en los misiles dependerá de dos factores:
a) Del tamaño del área final. Como se vio en Fig. 3.9 esa área puede reducirse diseñando la cola del fuselaje de forma troncocónica.
b) Del área de salida de gases. Cuando existe propulsión el área efectiva de base se reduce en un valor igual (o muy próximo) al área de salida de gases. En efecto, esta área no contribuirá a la depresión que se crea detrás del cuerpo, puesto que el chorro la elimina en esa zona.
Para definir la resistencia de base, en primer lugar se determina, para el número de Mach correspondiente, el coeficiente de resistencia de base de un cilindro, que denominaremos
bDC′ , que estará referido al área

Página 61 Misiles II
frontal de dicho cilindro. En el Anexo se presentan valores de este coeficiente general. Siguiendo la Fig. 3.4, se obtendrán los siguientes coeficientes de resistencia de base según varía el área de base efectiva, referidos al área frontal del cilindro del fuselaje ( S ).
1. Fuselaje cilíndrico de diámetro d , manteniendo la misma área frontal hasta el final. Sin propulsión.
b bDDC C′= (3.13)
2. Geometría igual ala anterior pero con propulsión:
b bD
eD
S AC CS−′= (3.14)
Siendo S la superficie de diámetro d y eA el área de salida de gases con diámetro ed .
3. Fuselaje cilíndrico de diámetro d , terminando troncocónicamente con una superficie frontal de diámetro bd . Sin propulsión:
b b
bD D
SC CS
′= (3.15)
Siendo bS la superficie de diámetro bd .
4. Geometría igual ala anterior pero con propulsión:
b bD
b eD
S AC CS−′= (3.16)
Resistencia de base de alas y controles
Si al borde de salida de alas (o controles) es plano o romo, existe también una resistencia de base que estaría dada por una expresión igual ala [13], donde ahora bS sería la suma de la sección frontal de salida de
las cuatro alas. El coeficiente de base bDC′ sería diferente, en general, al utilizado para el fuselaje, pero en
primera aproximación se puede utilizar también ese valor para las alas.
3.3.4 Resistencia de fricción
La resistencia de fricción depende esencialmente del estado de la capa límite, que puede ser laminar o turbulenta, lo que a su vez este influenciado de una manera principal por el numero de Reynolds.

Página 62 Misiles II
Fig. 3.12: Resistencia de base de un cuerpo cilíndrico
El estudio exacto es muy complicado pues se requiere conocer el gradiente de velocidades en la capa límite así como las temperaturas en la pared y en la corriente. Se presentará un método aproximado que da resultados suficientemente aceptables para un diseño previo a ensayos en túnel. Se utilizarán los siguientes conceptos de:
− Coeficiente de fricción medio:
21
2V
ff
w
D
Sρ=c (3.17)
Donde:
fD = Resistencia de fricción de una superficie.
ρ = Densidad.
V = Velocidad.
wS = Superficie mojada.
− Coeficiente de fricción local:
21
2V
wfc τ
ρ= (3.18)
Siendo wτ el esfuerzo de cortadura en la superficie.
3.3.4.1 Resistencia de fricción de una placa plana a) Fluido incompresible.

Página 63 Misiles II
El coeficiente de fricción local incompresible de una placa plana, fic , depende esencialmente del número
de Reynolds, Re, en la forma:
Para capa límite laminar:
1/20,664 Refic −= (3.19)
Para capa límite turbulenta:
2,45100,288 (log Re)fic −= (3.20)
Siendo el número de Reynolds:
Re Vxρµ
= (3.21)
donde ρ , V , µ son respectivamente la densidad, velocidad, viscosidad de la corriente kg (masa)m s
⋅
y
x es la distancia recorrida por la corriente sobre la placa hasta el punto local que se esté considerando. La capa límite es laminar para números de Reynolds bajos, pasando a turbulenta al pasar Re de un cierto valor que dependerá de las características de la placa. Una aproximación, que suele resultar conservativa, es que la capa límite pasa de laminar a turbulenta para 6Re 10≤ .
b) Fluido comprensible.
La relación entre el coeficiente de fricción local de una placa plana supuesto el fluido comprensible y el correspondiente a fluido incomprensible, depende de los siguientes parámetros principalmente:
1( , , ) (capa límite laminar)f
fi
cf M T r
c= (3.22)
2 ( , , ) (capa límite turbulenta)f
fi
cf M T r
c= (3.23)
siendo : M =numero de Mach; T = temperatura; r = factor de recuperación de entalpia.
w e
r e
i iri i
−=
− (3.24)
siendo i = entalpia:
0
T
pi c dT= ∫ (3.25)
y los subíndices indican: w = superficie mojada de la placa; e = borde de la capa límite; r = condiciones de transmisión nula de calor, siendo:
2112
r
ee
i r Mi
γ −= + (3.26)

Página 64 Misiles II
Si se supone que 0r = , se obtiene el valor máximo de f
fi
cc
en [20] y [21]. Con esa suposición y
suponiendo también que la temperatura en la estratosfera ( 216,5 KT = ) (lo que da un pequeño error también conservativo) se han dibujado las funciones [20] y [21] en la Fig. 3.13.
Fig. 3.13: relación entre coeficientes de fricción medios y locales
(placa plana; 0w e
r e
i iri i
−= =
−; 216,5 KT = )
Hasta ahora se han calculado coeficientes de fricción locales, pero para el cálculo del coeficiente de resistencia interesan los coeficientes de fricción medios, fc .
Estos coeficientes medios se deducen de los locales en compresible, fc , mediante las relaciones:
− Capa laminar:
2f fc=c (3.27)
− Capa turbulenta:
0,15101,597(log Re)f
fc−=
c (3.28)
que se puede aproximar por:
1,25f fc≈c (3.29)
Para una placa plana de longitud l en dirección de la corriente y área mojada wS , el coeficiente de resistencia de fricción se obtiene pues con los pasos siguientes:
Página 65 Misiles II
1. Determinación del número de Reynolds con los datos atmosféricos correspondientes a la altura de vuelo y la longitud I de la placa.
2. Cálculo del coeficiente de fricción local incomprensible, fic , con ecuación [17] si 6Re 10< y con
[18] si 6Re 10≥ .
3. Cálculo del coeficiente fricción local comprensible, fic , utilizando la Fig. 3.12.
4. Cálculo del coeficiente de fricción medio, fic , mediante la fórmula [25] si 6Re 10< y con [26] (o
[27]) si 6Re 10≥ .
5. Los valores de fc calculados en Paso 4 son ya los coeficientes de resistencia de fricción, referido
al área mojada, wS .
Si el área de referencia, S , que se toma para el coeficiente de resistencia es otra diferente de wS , el coeficiente de resistencia de fricción será:
fDFwSc
S= c (3.30)
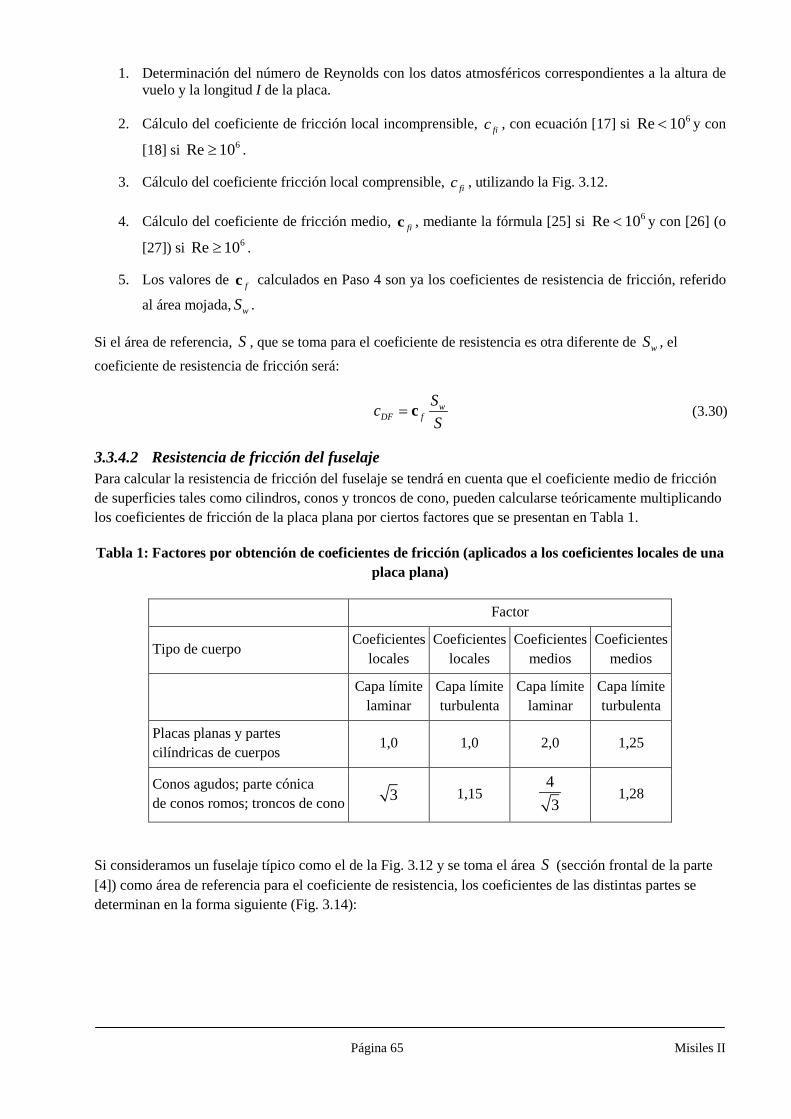
3.3.4.2 Resistencia de fricción del fuselaje Para calcular la resistencia de fricción del fuselaje se tendrá en cuenta que el coeficiente medio de fricción de superficies tales como cilindros, conos y troncos de cono, pueden calcularse teóricamente multiplicando los coeficientes de fricción de la placa plana por ciertos factores que se presentan en Tabla 1.
Tabla 1: Factores por obtención de coeficientes de fricción (aplicados a los coeficientes locales de una placa plana)
Factor
Tipo de cuerpo Coeficientes
locales Coeficientes
locales Coeficientes
medios Coeficientes
medios
Capa límite laminar
Capa límite turbulenta
Capa límite laminar
Capa límite turbulenta
Placas planas y partes cilíndricas de cuerpos
1,0 1,0 2,0 1,25
Conos agudos; parte cónica de conos romos; troncos de cono 3 1,15
43
1,28
Si consideramos un fuselaje típico como el de la Fig. 3.12 y se toma el área S (sección frontal de la parte [4]) como área de referencia para el coeficiente de resistencia, los coeficientes de las distintas partes se determinan en la forma siguiente (Fig. 3.14):

Página 66 Misiles II
Fig. 3.14: Partes de un fuselaje típico ( iS = áreas mojadas, exteriores, de cada parte)
(1) Proa.
Se calcula el coeficiente local, 1fc de una placa plana de longitud 1l ( 1Re se basa en 1l ).
Si la proa es un cono el coeficiente de resistencia de fricción será:
11 1 1( )DF f
SC c kS
= (3.31)
donde 143
k = para laminar, 1 1,28k = para turbulenta y 1S es el área exterior mojada del cono.
Si tiene una forma ojival, o troncocónica con una esfera sin ojiva en la parte delantera, se puede dividir en un cono y varios troncos de cono, aplicando expresiones similares a [29] a cada uno de ellos y sumándolos. La longitud a utilizar para cada Re seria la distancia desde la proa al final de la componente que se está estudiando.
(2) Primer cilindro.
El número de Reynolds se basara ahora en la longitud 2l desde la proa, y el coeficiente de resistencia de fricción será:
22
2 2( )DF fSC c kS
= (3.32)
Ahora, por tratarse de un cilindro y de acuerdo con la Tabla 1 será:
2 2k = para capa límite laminar. [31]
2 1,25k = para capa límite turbulenta. [32]
(3) Interetapa.
Sera un tronco de cono, con la corriente dirigida previamente, por lo que será:
33
3 3( )DF fSC c kS
= (3.33)
Página 67 Misiles II
donde 3k tiene los valores indicados en (1) (extraídos de Tabla -2 (OJO, NO EXISTE)) para laminar y turbulento.
(4) Segundo cilindro.
Cálculo totalmente similar al de la componente (2) (primer cilindro), tomando ahora 4l como longitud para Re:
44 4 4( )DF f
SC c kS
= (3.34)
siendo 4 2k k≡ de componente (2).
3.3.4.3 Resistencia de fricción de alas y controles Tanto las alas como los controles se consideran como placas planas mojadas por ambas caras.
Se toma como longitud para el cálculo del número de Reynolds, el valor de la cuerda media aerodinámica de cada semiala neta(o cada control neto).
Teniendo en cuenta que son 4 controles (o 4 alas) mojadas por ambas caras el coeficiente de resistencia de fricción de los controles serian:
) 4 2 / 2( ) 4( )( cDF c DF c f cc SC C k
S ′ =
= (3.35)
donde 2k = (laminar) y 1,25k = (turbulenta), cS = área de los dos controles netos unidos y S = área de
referencia, ( )DF cC el coeficiente de resistencia de las dos superficies mojadas de un control, y ( )f cc el
coeficiente de fricción local de una de esas superficies.
Para las alas seria análogamente:
) 4 2( / 2( ) ( ) wDF DF w f cwC c SC k
S= ′ =
(3.36)
donde wS es el área de dos semialas netas (Fig. 3.10).
3.3.4.4 Coeficientes de resistencia de fricción total La suma de los resultados de las expresiones [29], [30], [33], [34], [35] y [36] darían el coeficiente de resistencia de fricción del misil, DFC .
Dada la gran dependencia de este coeficiente del número de Reynolds y puesto que este varía con la altura de forma pronunciada, el coeficiente de fricción varía no solamente con el número de Mach sino también de la altura, aumentando con ella.
En un misil en vuelo subsónico este coeficiente y el de resistencia de base son los mayores, pudiendo representar el de fricción entre un 20% y un 40 % del total.
En vuelo supersónico el más importante es el coeficiente de resistencia de onda, y por tanto la aportación porcentual del coeficiente de fricción al total será menor, variando entre un 10% y un 25%.

Página 68 Misiles II
3.3.5 Resistencia parásita de la configuración completa
El coeficiente de resistencia con ángulo de ataque nulo se obtendrá por la suma de las distintas componentes calculadas:
bw fDD D DCC C C+= + (3.37)
Para una configuración dada el DC será función del Mach (M), de la altura de vuelo (aumentando con ella por causa de la de resistencia de fricción) y de si el vehículo esta en fase de propulsión o no (eso influye sobre la resistencia de base aumentando en el segundo caso).
La importancia de cada una de las componentes de [37] varía con el régimen de vuelo y con el diseño del misil.
En subsónico ya hemos dicho que Dfc es muy pequeña frente a las otras dos y en caso de que el misil sea
muy fuselado, la mayor parte de la resistencia estará dada por DFC (caso de las bombas aeronáuticas guiadas y no guiadas).
En supersónico la componente preponderante es la resistencia de onda, ( Dw Dfc C= ). Esta preponderancia
es máxima en aquellos misiles con proa hemisférica necesaria para el sistema detector /seguidor de infrarrojos.
Por otra parte, además del tipo de ojiva y de la forma de la base (cono de cola, propulsión, etc.), influye esencialmente en la resistencia el numero, tamaño y forma de las superficies sustentadoras (alas y controles). No puede tener la misma resistencia aerodinámica un simple cohete de sondeo provisto de una ojiva de baja resistencia, un fuselaje cilíndrico sin interetapas y cuatro aletas pequeñas estabilizadoras en cola, que un misil aire - aire, con proa semiesférica, alas que proporcionan 30 "g" laterales y superficies de control independientes.
En la Fig. 3.15 se presentan a efectos comparativos, valores indicativos de la resistencia parásita para varias configuraciones típicas.

Página 69 Misiles II
Fig. 3.15: Configuraciones demostrativas de variación de la resistencia aerodinámica. (A) Misil aire-aire guiado por infrarrojos. (B) Cohete de sondeo. (C) Bomba de aviación de baja resistencia
En Fig. 3.16 se muestran variaciones de 0DC con la altura y con/sin combustión para algunas de las configuraciones anteriores.
Fig. 3.16: Resistencia parásita de las configuraciones A, B, C de Fig. 3.15
3.4 Resistencia debida al ángulo de ataque Es el incremento de resistencia adicional que se presenta al misil cuando el ángulo de ataque no es nulo.

Página 70 Misiles II
Se le llama en muchas ocasiones resistencia inducida pero esto no es totalmente exacto. Resistencia inducida es la fuerza que se crea en la dirección de la velocidad como una componente de esa fuerza normal. Pero la fuerza normal (existencia de ángulo de ataque) crea además otra fuerza de resistencia llamada "fuerza viscosa debida a la fuerza normal" y que se deriva del incremento del espesor de la capa límite cuando aumenta el ángulo de ataque. Esto origina un incremento de la resistencia del perfil (tanto de la de presión como la de fricción). La resistencia debida a la fuerza normal es la suma de las dos anteriores, pero siendo la segunda muy pequeña en muchos casos, se toma la denominación de resistencia inducida para el total.
Fig. 3.17: Fuerzas aerodinámicas
De la Fig. 3.17se deduce:
cos senD x NC C Vα α+= (3.38)
sen cosL x NC C Cα α+= − (3.39)
donde LC , NC , xC y son respectivamente los coeficientes de sustentación, fuerza normal y fuerza axial
definidos en forma análoga a Dc .
Para 0α = tendríamos 0 0D xC C= . Para 0α ≠ tendríamos aproximadamente:
0 0D N D DiC C CC Cα +=+≈ (3.40)
De manera que podemos escribir:
1NDi NC C k Cα α≈ = (3.41)
Siendo 1k una cierta constante.
Pero siendo:
N NC C αα≈ (3.42)
donde NC α es la pendiente de sustentación.
Se puede escribir [40] en la forma:

Página 71 Misiles II
21
2
1 NN
NDi k kCC C
C αα
α≈ ≈ (3.43)
Si llamamos:
1
N
kkC α
= (3.44)
tendremos la clásica expresión:
2NDiC kC≈ (3.45)
En la anterior expresión, k es el "factor de incremento de resistencia" y se define como:
2D
D
i
dCkdC
= (3.46)
En supersónico, el valor de k es muy aproximadamente:
super1
N
kC α
≈ (3.47)
es decir, 1k ≈ en [42]. Resultará:
2NDi N
N
CC CC α
α
α= = (3.48)
En subsónico es:
sub 2
1 1
Nmk
A C απ≈ < (3.49)
donde A = alargamiento; 2m = constante dependiente de la forma del ala.
Sino se disponen de datos para calcular 2m , se puede utilizar en primera aproximación la expresión [46] para todo el rango de número de Mach en consideración, puesto que es conservativo en subsónico y muy aproximado en supersónico.
Hasta ahora se ha supuesto que solo existía un ángulo de ataque pero no deflexión del control, es decir el valor de NC de [47] es el coeficiente de fuerza normal del misil sin deflexión del control, es decir es
( )NC α (sustentación debida aα ).
Si existe un ángulo δ (deflexión del control), existirá también un incremento de sustentación ( )N δ , con su
correspondiente coeficiente aerodinámico ( )NC δ . Análogamente a [47] existirá un coeficiente de
resistencia debido a δ y que podemos definir en forma análoga:
22( )( ) N
Di NN
CCCC
δδ δ
δ
δ≈= (3.50)
Página 72 Misiles II
y por tanto llamando ( )DiC δ el dado en [47], tendremos:
2 2( ) ( )( ) ( ) N N
Di Di DiN N
C CC C CC C
αδ
δα
δ
α
= + = + (3.51)
y también:
2 2D N NC C Cα δα δ= + (3.52)
3.5 Anexo
3.5.1 Introducción
En el Texto se han dado datos y métodos para el cálculo de la resistencia de cuerpos, pero no se han considerado algunos temas por ser menos comunes. Estos temas son: resistencia de onda de proas con tomas de aire y de colas troncocónicas de fuselaje y los de resistencia de presión, todos ellos en subsónico, para cuerpos y alas. Estos temas se tratan a continuación, dando algunos datos representativos. Se entiende que las componentes de la resistencia a estudiar son a ángulo de ataque nulo.
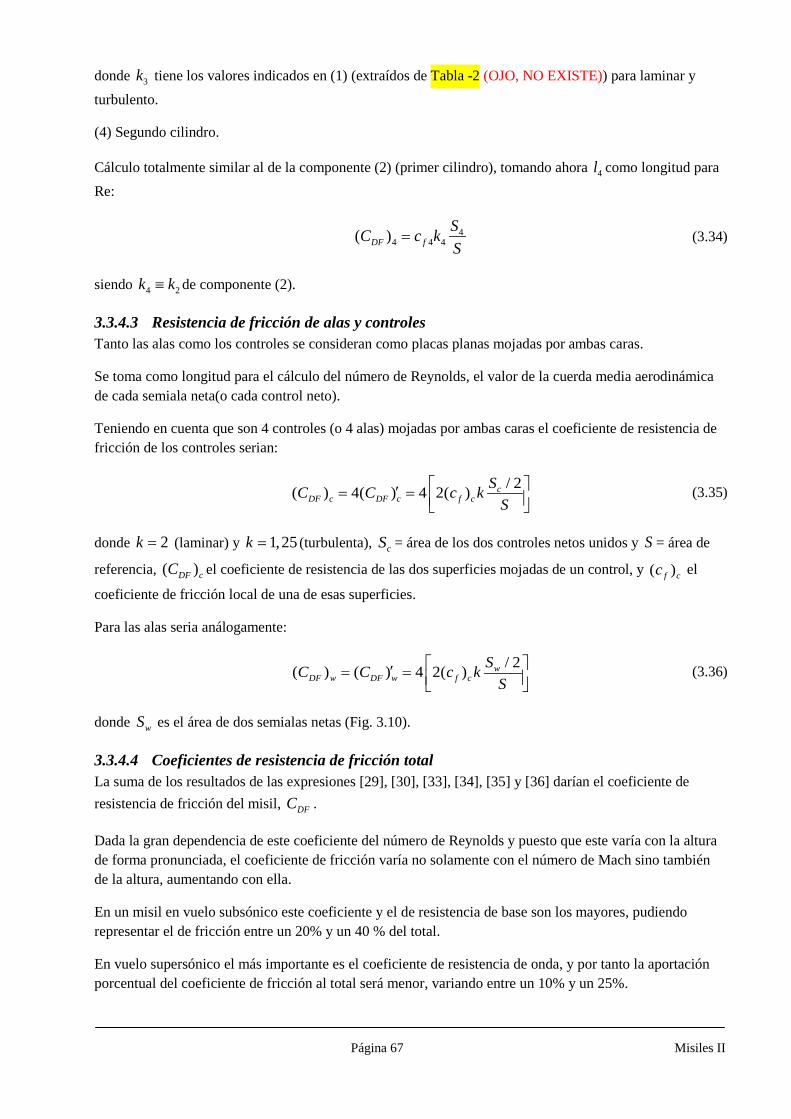
3.5.2 Resistencia de onda en proas con toma de aire
En Fig. 3.18 se dan datos para resistencia de onda de ciertos tipos de tomas de esta clase, en supersónico.
Fig. 3.18
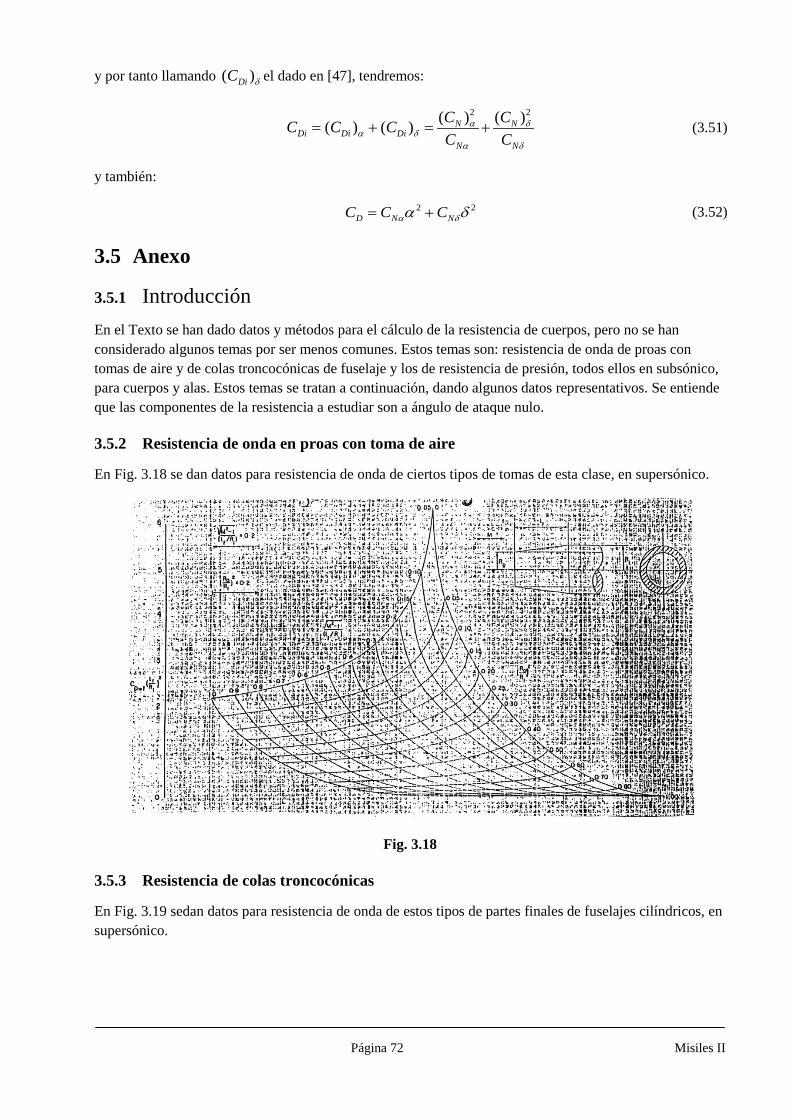
3.5.3 Resistencia de colas troncocónicas
En Fig. 3.19 sedan datos para resistencia de onda de estos tipos de partes finales de fuselajes cilíndricos, en supersónico.
Página 73 Misiles II
Fig. 3.19
3.5.4 Resistencia de presión en subsónico
La resistencia de presión en subsónico está compuesta por la debida a la forma de la parte frontal y por la de base. La segunda ya fue estudiada en el Texto y junto con la de fricción completa prácticamente la resistencia en subsónico.
La resistencia de presión frontal es muy pequeña en subsónico y en muchos casos no se considera. Solamente tiene cierta importancia cuando el cuerpo tiene la proa muy redondeada o los espesores relativos del ala son importantes.
3.5.4.1 Resistencia frontal en subsónico de cuerpos Una fórmula semiempírica es:
3
60( ) 0,0025 ( )( / )
BDp B Df B
B
lC Cl d d
= + (3.53)
siendo:
Bl = longitud del cuerpo
d = diámetro del cuerpo
( )Df BC = coeficiente de resistencia de fricción del cuerpo.
( )Dp BC y ( )Df BC están referidos a la superficie S de referencia.
3.5.4.2 Resistencia de presión en subsónico de alas. Una fórmula empírica aplicable a alas típicas de misiles: trapezoidales, doble delta, etc., es la siguiente:

Página 74 Misiles II
4 2( ) 4 ( / ) 100( / ) ( ) ( / 2)Dp w f w wC L t c t c C S QS
= + (3.54)
siendo:
( )Dp wC = coeficiente de resistencia de presión del conjunto de cuatro paneles de ala
( / )t c = espesor medio del ala en el sentido de la corriente
( )f wC = coeficiente de fricción de una superficie de un panel de ala
wS = superficie alar (dos paneles)
Q = factor de correlación de la superficie sustentadora
L = parámetro de posición del espesor
El valor de L depende de la posición del espesor máximo, siendo:
max
max
1,2 para ( / ) a
2,0 para ( /
0,30
0) ,30a c t
c t
L ct t yL t t cy
=
=
≥
< (3.55)
Normalmente, rc c= (cuerda en el encastre)
Q es una función del número de Mach, M , y del coseno de la flecha de la línea de max( / )ct t en rc , y se obtiene de Fig. 3.20
Fig. 3.20: Factor de correlación Q


















