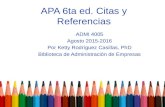
Métodos Aproximados en Ingeniería del.Ingeniero Pablo Rodríguez,PhD
61
Universidad Nacional Experimental Politécnica “Antonio José de Sucre” Vice Rectorado “Luís Caballero Mejías” Maestría en Ingeniería Mecánica Asignatura: Métodos Aproximados en Ingeniería Profesor: Ing. Pablo Rodríguez, PhD. Caracas, Agosto de 2004
-
Upload
vilmafajardo -
Category
Documents
-
view
718 -
download
0
description
Este es el libro del Ingeniero pablo Rodríguez de Métodos Aproximados en Ingeniería
Transcript of Métodos Aproximados en Ingeniería del.Ingeniero Pablo Rodríguez,PhD

Universidad Nacional Experimental Politécnica “Antonio José de Sucre”
Vice Rectorado “Luís Caballero Mejías”
Maestría en Ingeniería Mecánica
Asignatura: Métodos Aproximados en Ingeniería
Profesor: Ing. Pablo Rodríguez, PhD.
Caracas, Agosto de 2004

ii
CONTENIDO
Página
Agradecimiento
v
Sección I Revisión Breve de algunos tópicos matemáticos
1
Sección II Solución numérica de polinomios y funciones
transcendentales
7
Sección III Interpolación y aproximación. Polinomio
Interpolante de Lagrange
28
Sección IV Mínimos cuadrados, Aproximación polinómica
33
Sección V Método de eliminación de Gauss-Jordan para
resolver ecuaciones simultáneas lineales
43
Sección VI
Sección VII
Sección VIII
Métodos iterativos aplicados a sistemas de
ecuaciones lineales
Integración Numérica
Diferenciación Numérica
51
56
84

iii
Sección IX
Sección X
Anexo A
Anexo B
Anexo C
Anexo D
Anexo E
Anexo F
Anexo G
Anexo H
Anexo I
Solución Numérica de Ecuaciones Diferenciales
Parciales Mediante Diferencias Finitas
Uso de Aproximaciones Mediante Elementos
Finitos en Análisis Numéricos
Algoritmo Tridiagonal
Solución de Problemas Mediante los Métodos
Explícito e Implícito
Algoritmo de una Matriz Triangular
Solución de una Ecuación Diferencial Mediante el
Método de Elementos Finitos
Error Absoluto. Error Relativo. Cifras
Significativas y Número de Decimales Correctos
Diferencias Divididas, Polinomio Interpolante de
Newton
Programas Computacionales
Principales Instrucciones en Basic Usadas para
Resolver Problemas de Análisis Numérico
Tareas
95
129
138
145
153
160
175
180
202
216
226

iv
Referencias
Trabajos
Complementarios
Simulación del Proceso de Forja en Caliente de
Codos sin Costura.
Método de Elemento Finito.
Solución Implícita simple para la Ecuación de
Conducción del Calor.
Ecuación de un Elemento para Una Barra
Calentada.
Modelado en Elementos Finitos del Viaducto 1
Caracas – La Guaira.
Solución de una Ecuación Diferencial mediante el
Método de Elementos Finitos aplicando
Funciones de Peso a los Residuos con el Método
Especial de Galerkin.
Método de Elemento Finito para la Simulación de
las temperaturas nodales en un tabique para
fuegos.
Distribución de Temperatura en una Barra Larga
y Delgada (Método Explícito).
Simulación Numérica de Procesos.
238
240

v
AGRADECIMIENTO
El manual original fue preparado gracias a la colaboración de las
siguientes personas: Lucía Rojas quien participó en la redacción, el Ingeniero
Emilio Santana elaboró los programas computacionales, el Técnico Justino
Rojas hizo la totalidad de los dibujos, y la Señora Carmen Rosa Guerra
mecanografió el texto.
La elaboración de la nueva versión de este manual fue posible gracias
al trabajo de los Estudiantes la Asignatura Métodos Aproximados en
Ingeniería de la Maestría en Ingeniería Mecánica de la UNEXPO, Vice
Rectorado “Luis Caballero Mejías” durante el primer período del año 2.004,
los cuales se mencionan a continuación: Ing. Varosky Cediel, Ing. Daniele
Spinosa, Ing. Héctor Urbina, Ing. Gilberto Durán, Ing. Edson Ballen, Ing.
Jesús González, Ing. Nancy Chacón, Ing. Javier Liste, Ing. José Baldes, Ing.
Eduardo Mendoza, Ing. Ronald Galea e Ing. José Sosa; todos bajo la
coordinación del Profesor de la asignatura PhD. Pablo Rodríguez.

vi
I REVISIÓN BREVE DE ALGUNOS TOPICOS MATEMATICOS

vii
1.1 INTRODUCCION.
El objetivo de esta sección es revisar los conceptos usados con mayor
frecuencia en el texto. Ellos son los siguientes: la pendiente de una función,
el teorema del valor medio para derivadas, el teorema de Rolle, la formula de
Taylor con residuo y el teorema fundamental de álgebra.

viii
f(b)
f(x)
f(a)
1.1.1. Pendiente de una Función
x
Fig. 1-1 Función de pendiente constante
Fig. 1-2 Función de pendiente nula
Fig. 1-3 Función de pendiente variable
f(b) f(x)
f(a)
f(b) f(x)
f(a)
ab
afbf
dx
df )()( Pendiente
constante
(1-1)
a b x
y
ab
afbf
dx
df )()( Pendiente igual
a cero
(1-2)
Sea f(x) continua en [a,b] y diferenciable en (a,b) f(x)
b
a
)()()( `
fab
afbf
dx
dfX
f(x)
f(x)
a b ξ
x
Tangente en el punto X = ξ

ix
1.1.2. Teorema del valor medio para derivadas (o valor intermedio)
Si f(x) es continua sobre el intervalo cerrado y finito ba, y
diferenciable para bxa , entonces existe por lo menos un valor de
x
donde:
ab
afbff
'
(1-4)
Fig. 1-4 Función de pendiente nula en el punto x
Usando el teorema del valor medio para derivadas:
)(')()(
fab
afbf
(1-5)
Si ),()( bfaf entonces:
00)()(
0)('
abab
afbff
Tangente a f(x) en el punto x
f(b)
f(x)
f(a)

x
1.1.3. Teorema de Rolle.
Sea f(x) continua sobre el intervalo bxa y diferenciable sobre el intervalo
.ba Entonces,
Si ),()( bfaf existe por lo menos un valor de x de tal manera que
ba y 0)(' f (1-6)
Observe que puede existir varios valores ,1 ,2 n donde
0)(')(')(' 21 nfff (1-7)
1.1.4. Fórmula de Taylor con residuo.
Sea una función )(xf que posea )1( n derivadas continuas en el intervalo
ba, y sea c un punto cualquiera en dicho intervalo. Entonces podemos
escribir:
)(!
))((
!2
))((''))((')()( 1
)(2
xRn
cxcfcxcfcxcfcfxf n
nn
(1-8)
donde:
dssfsxn
xR n
n
c
n
n
)()(!
1)( )1(
1
(1-9)
Un ejemplo del desarrollo de la fórmula de Taylor es:
Xexf )(
(1-10)

xi
Usando (1-8) se obtiene:
)!1(!!21
12
n
ex
n
xxxe
nnX
para algún valor de entre 0 y x.
1.1.5. Teorema fundamental del álgebra.
Sea )(xp un polinomio de grado .1n Es decir:
n
n xaxaxaaxp 2
210)( (1-11)
donde los coeficientes ,0a ,1a
n
n xaa ,,2 pueden ser números reales o
complejos y .0na En este caso )(xp tiene por lo menos una raíz. Esto
equivale a la expresión:
0)( p (1-12)
donde )( es un número complejo.
Por definición:
0lim
xdx
df
0lim
)()(
xx
xfxxf
x
f

xii
II.- SOLUCIÓN NUMÉRICA DE POLINOMIOS Y FUNCIONES
TRANSCENDENTALES.
2. 1. Introducción.
2. 2. Problemas y soluciones.
2. 3. Criterios a consolidar para terminar un proceso de iteración.

xiii
2.1 Introducción.
Generalmente, el ingeniero se ve en la necesidad de resolver funciones
transcendentales como por ejemplo:
02)( Xxexf (2-
1)
o, polinomios como por ejemplo:
0542)( 2
2 xxxP (2-2)
Es de hacer notar que la ecuación (2-1) es implícita en x y la ecuación (2-2)
es explícita en x.
Entre los métodos usados para resolver estas ecuaciones se puede
mencionar los siguientes: tanteo, bisección, falsa posición, gráfico y Newton-
Raphson. De cada uno de ellos presentamos ejemplos y en algunos casos
los fundamentos teóricos. El lector que desee profundizar la teoría puede
consultar las referencias (1), (2) y (3).
2.2. Problemas y soluciones.
2.2.1. Problemas usando el método de tanteo.
Problema n° 1:
Use el método de tanteo para encontrar la raíz positiva más pequeña de
1)( 3 xxxf

xiv
con dos cifras significativas.
Solución.
Tabla 2-1.
x 3x 1)( 3 xxxf
0 0 -1
1 1 -1
1,2 1,728 -0,472
1,3 2,197 -0,103
1,4 2,744 +0,344
1,5 3,475 +0,975
La raíz positiva más pequeña está entre 3,1x y 4,1x (ver figura n°. 2.1).
2.2.2. Problemas usando el método de bisección.
Problema n° 1:
Encontrar la raíz positiva más pequeña de 1)( 3 xxxf usando el
método de bisección. Repita el proceso durante 5 etapas.
Solución:
Primera condición del método de bisección:
Si )(xf es continua y si )( 0af ,0)( 0 bf
entonces )(xf debe anularse
en el intervalo 00 ,ba

xv
0,5 1,5
m3= 1,31875 m4= 1,3125
a0 b0 1,3 1,35 1,4
Fig. 2-1 Método de tanteo, solución gráfica (problema n° 1)
Fig. 2-2 Método de bisección, representación gráfica del proceso iterativo (problema 1)
Raiz positiva más pequeña
x
f(x) = x3-x-1
f(x)
2
1
0
-1
-2
x
f(x)
m4
m0=b1
m1=1,325

xvi
Segunda condición del método de bisección:
Por definición:
2
)( nn
n
bam
0)()( nn mfafSi
Se debe continuar los cálculos con:
nn aa 1 y
nn mb 1
En otros casos usar
nn ma 1 y
nn bb 1
en el problema se encontró que:
103,0)3,1()( 0 faf
344,0)4,1()( 0 fbf
Por lo tanto: )( 0af 0)( 0 bf

xvii
Suponiendo que )(xf es continua para 00 bxa y como se sabe que
)( 0af 0)( 0 bf se puede aplicar la primera condición. Es decir, )(xf
debe anularse en el intervalo 00 ,ba
.
El procedimiento es el siguiente:
1º etapa
2
nn
n
bam
por lo tanto 2
00
0
bam
35,12
4,13,1
nm
; 1104,0)35,1()( 0 fmf
)( 0af 0)1104,0)(103,0()( 0 mf; por lo tanto use
3,101 aa y
35,101 mb
2º etapa
325,12
35,13,1
2
111
bam
; 0012,0)( 1 mf
)( 1af )3,1()( 1 fmf 0)0012,0)(103,0()1325,0( f
use 3,112 aa y 325,112 mb

xviii
3º etapa
3125,1
2
325,13,1
2
222
bam
; 0515,0)( 2 mf
)( 2af )3,1()( 2 fmf 0)0515,0)(103,0()3125,0( f
use 3125,123 ma
y 325,123 bb
31875,13 m
4º etapa
)( 3af
)3125,1()( 3 fmf )0515,0()31875,1( f 0)253.0(
use 31875,134 ma
y 325,134 bb
5º etapa
321875,14 m
que es el valor de la raíz al final de la quinta etapa,
(ver figura n° 2-2)

xix
Problema n°.2:
Use un método de tanteo para obtener la raíz positiva más pequeña de
2)( Xxexf
Con una cifra significativa
Solución:
Tabla n°.2-2
x Xe Xxe 2)( Xxexf
0 1 0 -2
0,5 1,6487 0,8243 -1,1756
0,8 2,2255 1,7804 -0,2196
0,9 2,4596 2,2136 +0,2136
(ver figura n°. 2-3)
La raíz más pequeña está entre 0,8 y 0,9.
2.2.3. Problemas usando el método de la falsa posición.
Problema n°. 1:
Obtenga la raíz positiva más pequeña de 2)( Xxexf usando el método
de falsa posición. Repita el proceso hasta lograr un raíz con cuatro cifras
significativas.

xx
Solución:
Primera condición del método de falsa posición:
Si )(xf es continua y si)( 0af 0)( 0 bf
, el valor de )(xf debe anularse en el
intervalo 00 ,ba
.
2)( xexxf
x F(x)
0,5 -1,18
0,6 -0,91
0,7 -0,59
0,8 -0,22
0,9 0,21
1 0,72
-1,2
-1,0
-0,8
-0,6
-0,4
-0,2
0,0
0,2
0,4
f(x)
Fig. n° 2-3 Solución gráfica al (problema n°2)
.5 .6 .7 .8 .9 1 X

xxi
Segunda condición del método de falsa posición:
Por definición:
)()(
)()(
nn
nnnn
nafbf
afbbfaW
Tercera condición de falsa posición:
Si )( naf
0)( nWf
Se debe continuar los cálculos con
nn aa 1 y
nn Wb 1
En cualquier otro caso usar:
nn Wa 1 y
nn bb 1
En el problema 2 se obtuvo:
9,00 b;
2136,0)9,0()( 0 fbf
8,00 a;
2196,0)8,0()( 0 faf

xxii
Por lo tanto 0)()( 00 bfaf
Como 2Xxe es una función contínua en el intervalo 9,08,0 x y, )( 0af
0)( 0 bf se puede usar el método de falsa posición.
)()(
)()(
nn
nnnn
nafbf
afbbfaW
2196,02136,0
)2196,0)(9.0()2136,0)(8,0(
)()(
)()(
00
0000
0
afbf
afbbfaW
1° etapa:
851,00 W
00697,0)851,0( f
0)00697,0)(2196,0()()( 00 Wfaf
Tomar 851,001 Wa
9,001 bb
)()(
)()(
11
11111
afbf
afbbfaW
00697,02136,0
)00697,0)(9,0()2136,0)(851,0(1
W
8526,01 W
que es el valor de raíz positiva más pequeña y con 4 cifras significativas ( ver
figura n° 2-4)

xxiii
2.2.4. Significado físico del método de falsa posición.-
(ver figura n° 2.5)
La pendiente de la recta que va del punto (1) a punto (2) es:
Pendiente (1) a (2)
nn
n
nn
nn
Wb
bf
ab
afbf )(()(
Por lo tanto, despejando :nW
)()(
)()()()(
nn
nnnnnnnn
nafbf
bfabfbafbbfbW
)()(
)()(
nn
nnnn
nafbf
afbbfaW
(2.3)

xxiv
Fig. 2-4 Representación gráfica del método de falsa posición (problema 1)
Fig. 2-5 Representación gráfica del método de falsa posición
a1= W0 = 0,851
0,9 x
b0 = b1 = 0,09 f(x) = x.e
x - 2
0,8
a0 = 0,8
f(x)
0,3
0,2
0,1
0
-0,1
-0,2
-0,3
f(x)
f(bn)
f(bn)
bn
Wn
Aproximación de f(x)
1
x
f(x)
an

xxv
Pendiente (1) a (2)
nn
n
nn
nn
wb
bf
ab
afbf ()()(
Por lo tanto, despejando wn:
)()(
)()()()(
nn
nnnnnnnnn
afbf
bfabfbafbbfbw
)()(
)()(
nn
nnnnn
afbf
afbbfaw
2.2.5. Método de Newton-Raphson.
2.2.5.1 Bases Teóricas.
Sea 00 bXa
Si f(x) tiene una serie de Taylor alrededor del punto X0, entonces podemos
escribir que:
(2-4)
donde: 000 bxa
Por lo tanto para 1xx
Donde: 010 bxa
............2
1)()()(
00
2
22
000
XXXX dx
fdxx
dx
dfxxxfxf

xxvi
............2
1)()()(
00
2
22
010101
XXXX dx
fdxx
dx
dfxxxfxf
(2-
5)
Si x1 es una raiz de f(x), entonces: 0)( 1 xf (2-6)
Si 201 xx
es muy pequeña, podemos despreciar los términos de la
ecuación (2-5) que sean iguales y mayores al segundo orden.
Usando (2-5) y (2-6) y esta última posición, nos queda que:
),(')(0 0010 xfxxxf
donde
0
)(' 0
XXdx
dfxf
(2-7)
La ecuación (2-7) también puede escribirse de la siguiente manera:
)('
)(
0
001
xf
xfxx
(2-8)
Si resulta que x1 no es una raíz sino una aproximación, podemos continuar el
proceso iterativo con
)('
)( 112
nxf
xfxx
(2-10)
Esta fórmula se conoce con el nombre de Newton-Raphson.

xxvii
2.2.5.2. Problema n° 1:
Obtenga la mayor raíz de:
1
1)()(
x
xxSenxf
Usando:
a) Un método gráfico.
b) El método de Newton-Raphon con siete cifras significativas.
Solución:
A. Método gráfico cuando x es una raíz f(x)= 0; por lo tanto:
1
1)(
x
xxSen
Para valores de 1x
11
1
x
x
para x= 1 existe una indeterminación.
El mayor valor del Sen(x) es 1.Por lo tanto para valores de 1x no existe
raíz posible.
Existe un número infinito de raices negativas. Por lo tanto, el método gráfico
muestra que la mayor raíz de f(x)= 0, es aproximadamente:
4,0x
(ver figura n° 2-6)
Este valor se usa en la parte B) para obtener mayo número de cifras
significativas.

xxviii
B. Método de Newton-Raphson.
1
1)()(
x
xxSenxf
21
2)()('
)(
xxCosxf
dx
xdf
1
1
x
x
1
1
x
x para x>1
(valores positivos)
para x<1
Las raíces son todas negativas
sen (x)
r2 r1
r3
Fig. 2-6.- Solución gráfica del problema Nº 1

xxix
Usando la ecuación (2-10):
)('
)(1
n
nnn
xf
xfxx
2
1
1
2)(
1
1)(
n
n
n
nn
nn
xxCos
x
xxSen
xx
Por lo tanto, para n= 0
X X1 = 1.015
-800
-500
500
1000
f(x)
f(x)
f(x1) = 1000
f(x0) = -800
X0 = 1.01
Fig. 2-7.- Demostración de que el criterio absoluto de la raíz no siempre es suficiente.

xxx
2
0
0
0
00
01
1
2)(
1
1)(
xxCos
x
xxSen
xx
Tabla 2-3
n xn f(xn) f’(xn) f(xn)/f’(xn)
0 -0,4000 0,039153 1,94147 0,0201070
1 -0,4201 0,000500 1,90478 0,0002625
0201,04,0)(')( 0001 xfxfxx
4201,01 x
0002625,04201,0)(')( 1112 xfxfxx
4203625,02 x
2.3. Criterios a considerar para terminar el proceso de iteración.
Existen varios criterios que se complementan con la experiencia.
2.3.1. Criterio de error absoluto de la raíz.
Considera que la iteración termina cuando:
XTOLxx nn 1
donde XTOL es un valor prefijado.
Este criterio puede cumplirse y, aún así, f(xn) ser un valor muy grande.

xxxi
Esto se puede apreciar en la figura n° 2-7
Para este caso: XTOLxx 005,001,1015,101
Sin embargo: FTOLxf 1000)( 1
Es decir, para este caso se cumple la condición: ,1 XTOLxx nn
Pero la condición FTOLxf n )(
es contraria a lo deseado.
2.3.2. Criterio de error absoluto de la función.
Supone que la iteración termina cuando: FTOLxf n )(
En la figura n°2-8 se observa que se cumple que:
FTOLxf )( 2
pero:
,02,01201 xx lo que es contrario a lo deseado.
X X1 = 1.0
f(x)
f(1) = 0.002 f(2) = -0.001
X0 = 2.0
Fig. 2-8.- Demostración de que el criterio absoluto de la función no es suficiente en todos los casos.

xxxii
2.3.3. Criterio de error relativo.
Según este criterio se puede usar un error un error relativo definido de la siguiente forma:
FTOLFTAM
xf n
(
ó )(1 nnn xXTOLxx
donde:
FTAM= magnitud de f(x) en alguna proximidad de la raíz establecida.
2.3.4. Caso especial.
)()(
)()(
nn
nnnnn
afbf
afbbfaW
(2-3)
(ver figura N° 2-9)
En este caso especial:
0
valorW
Por lo tanto, un criterio general es terminar la iteración si se presenta el caso
de dividir por cero.
Experiencia en programación permite tomar precauciones adicionales como
son las siguientes:
a) Tiempo máximo de computación en parte o totalidad del programa.
b) Número máximo de páginas que se deben imprimir.
c) Imprimir resultado parciales para su análisis.
d) Fijar número máximo de iteraciones.

xxxiii
III.- INTERPOLACION Y APROXIMACIÓN. POLINOMIO
INTERPOLANTE DE LAGRANGE
3.1. Fundamentos teóricos.
3.2. Problemas y soluciones.
3.1. Fundamentos teóricos.

xxxiv
Vamos a suponer que nos dan x0,x1,…..xn puntos distintos (n+1) en el eje real
en algún intervalo ,,baI de tal manera que se conocen los valores de
f(x0), f(x1),….. f(xn).
Queremos construir un polinomio Pn(x) de la forma siguiente:
)(1)(..........)(1)()(1)()( 1100 xxfxxfxxfxP nnn (3-1)
n
k
kk xxf0
)(1)(
(3-2)
Este es el polinomio interpolante de Lagrange. La curva representada por el
polinomio Pn(x) pasa por los (n+1) puntos distintos. Es decir:
);()( 000 xfxP ..,),........()( 111 xfxP
)()( nnn xfxP (3-3)
para que la ecuación (3-3) se pueda cumplir es necesario que se cunpla lo
siguiente:
;1)(1 00 x
;0)(1 01 x
;0)(1 00 x
;0)(1 10 x ;1)(1 11 x
;0)(1 1 xn (3-4)
;0)(10 nx
;0)(11 nx
;1)(1 nn x
Observando la ecuación (3-4) podemos concluir que:
)(1 ik x 1 si ki
0 si ki

xxxv
Los valores de )(1 xk pueden obtenerse directamente de la siguiente
ecuación:
n
i ik
ik
xx
xxx
0
)(1
nk ,.....,1,0 (3-6)
ki )(xik es de grado n
3.2. Problemas y soluciones.
Problema No. 1
Si n= 3
¿Cuales son los valores de ),(10 x
),(11 x ),(12 x )(13 x usando ecuación
(3-6)?
Solución:
302010
3210 )(1
xxxxxx
xxxxxxx
(3-7-A)
312101
3201 )(1
xxxxxx
xxxxxxx
(3-7-B)
321202
3102 )(1
xxxxxx
xxxxxxx
(3-7-C)
231303
2103 )(1
xxxxxx
xxxxxxx
(3-7-D)

xxxvi
Problema n° 2
Sea x0= 2, x1=3, x2= 6 y x3 = 7. Suponga n= 3.
Obtenga ),(10 x
),(11 x ),(12 x )(13 x.
20
763)(10
xxxx
12
762)(11
xxxx
12
732)(12
xxxx
20
632)(13
xxxx
Problema n° 3
k xk f(xk)
0 0 -5
1 1 1
2 3 25
Use la tabla n° 3-1 para encontrar el polinomio interpolante de Lagrange de
segundo grado, que pasa por los puntos dados en dicha tabla.
3
34
3010
31)(1
2
0
xxxxx

xxxvii
2
3
3101
30)(1
2
1
xxxxx
61303
10)(1
2
2
xxxxx
Por lo tanto, usando (3-2) podemos escribir lo siguiente:
)(1)()(1)()(1)()( 221002 xxfxxfxxfxP x
)(125)(11)(15)( 2102 xxxxP
542)( 2
2 xxxP

xxxviii
IV.- MINIMOS CUADRADOS – APROXIMACIÓN POLINÓMICA.
4.1. Introducción.
4.2. Bases teóricas del método.
4.2.1 Problema.
4.2.2 Mínimos cuadrados generalizados.

xxxix
4.1. Introducción.
En la sección anterior se construyó un polinomio P(x) que pasa exactamente
por (n+1) puntos críticos distintos. A este polinomio se le llama polinomio
interpolante de Lagrange. En esta sección se desea obtener una ecuación de
una curva que no pasa por todos los puntos (n+1) dados, sino cerca de ellos.
La idea principal consiste en buscar una aproximación a las funciones y(x) de
manera que minimice los cuadrados de los errores (positivos y negativos)
(Ver figura n° 4-1)
4.2. Bases teóricas del método.
Estas se discuten mediante la resolución de un problema sencillo.
4.2.1. Problema.
Un ingeniero mide en el campo varios valores de presión(y) en función de
tiempo (x). El desea saber cual es la mejor línea que puede dibujar usando
estas mediciones. Ellas son las siguientes:
X 0 1 2 3 4 5 6
y 2 3 5 5 9 8 10
Solución:
Antes de resolver el problema es deseable hacer un gráfico de los puntos
medidos (ver figura n° 4-2).
A primera vista parece razonable usar una aproximación:

xl
Fig. 4-1.- Lagrange y minimos cuadrados.
x
f(x)
Curva obtenida mediante el método
de los mínimos cuadrados
Polinomio interpolante de Lagrange
Fig. 4-2.- Línea recta usando una aproximación gráfica a puntos experimentales.
x
f(x)
Y0 = k0 + k1*x
0 1 2 3 4 5
2
4
6
8

xli
xkkY 10 (4-1)
Al representar los puntos medidos es necesario recordar que las mediciones
de campo contienen cierta cantidad de error. Este error puede ser originado
por el equipo usado para la medición, asi como por otros factores (lectura
incorrecta).
La diferencia entre un valor de yi medido y su correspondiente aproximación
Yi es entonces: (Yi – yi).
El criterio de los mínimos cuadrados requiere que la suma de los cuadrados
de las desviaciones (Yi – yi) sea lo más pequeña posible. Por lo tanto
podemos minimizar la suma:
7
1
2
i
ii yYS (4-
2)
Los valores de Yi – yi son los llamados residuos o desviaciones.
Usando (4-1) y (4-2) podemos escribir:
7
1
2
10
i
ii yxkkS (4-3)
Observe que en este caso xi e yi son valores fijos; por lo tanto se desea
encontrar los valores de k0 y ki que hagan de la S la suma mínima. Por esta
razón, S es función de k0 y de ki:
10,kkSS

xlii
Una manera de obtener el valor mínimo de S consiste en derivar
parcialmente con respecto a k0 y ki e igualar a cero las derivadas parciales.
Entonces:
00
k
S
y
01
k
S
(4-4)
Si la ecuación (4-4) se cumple, es mínimo cuadrado.
Usando (4-1), (4-2) y (4-4) obtenemos:
02
0
7
1 00
iii
i
yxkkkk
S
022
0
7
1
iii
i
yxkk
(4-
5)
02
0
7
1 11
iii
i
yxkkkk
S
022
0
7
1
iiii
i
yxkkx
(4-6)
De las ecuaciones (4-5) y (4-6) se obtiene:
7
1
0
7
1
7i
ii
i
i xkky
(4-7)
(4-8)
7
1
2
1
7
1
0
7
1 i
i
i
ii
i
i xkxkyx

xliii
Entonces, para poder obtener la mejor aproximación basada en los mínimos
cuadrados es necesario satisfacer las ecuaciones (4-7) y (4-8).
Vamos a tabular ii yx
7
1 y
7
1
2
ix
Tabla 4-1
Valores de ii yx
7
1 y
7
1
2
ix
i xi yi xiyi 2
ix
1 0 2 0 0
2 1 3 3 1
3 2 5 10 4
4 3 5 15 9
5 4 9 36 16
6 5 8 40 25
7 6 10 60 36
Totales
21
7
1
ix
42
7
1
iy
164
7
1
ii yx
91
7
1
2 ix
Usando las ecuaciones (4-7) y (4-8) los valores obtenidos en la tabla n° 4-1
construimos las siguientes ecuaciones normales*:
10 21742 kk (4-9)

xliv
10 9121164 kk (4-10)
La solución de este sistema de dos ecuaciones algebraicas y simultáneas es:
929639,10 k (4-11)
356787,11 k (4-12)
*Ecuaciones normales es el nombre que se da a las ecuaciones que
relacionan los coeficientes k0, k1,.......kn
Por lo tanto, sustituyendo (4-11 y (4-12) (4-1) nos queda que:
xY 356787,1929639,1 (4-13)
que es la ecuación de la línea recta buscada.
Una manera de verificar los resultados consiste en comprobar la ecuación
(4-5). Es decir:
07
1
i
ii yY
(4-14)
Tabla n° 4-2
Valores de
7
1i
ii yY
xi yi Yi Yi -yi
0 2 1,929639 0,070361
1 3 3,286426 -0,286426
2 5 4,643213 0,356787
3 5 6,000000 -1,000000
4 9 7,356787 1,643213
5 8 8,713574 -0,713574
6 10 10,070361 -0,070361

xlv
7
1
000000,0ii yY
Esto verifica la aproximación obtenida.
Se puede comprobar 140722,4
7
1
i
ii yY
4.2.2. Mínimos cuadrados generalizados.
Es posible que la línea recta que se construyó en la sección 4.2.1. no sea la
representación adecuada de los puntos medidos en el campo. En este caso
se puede suponer que un polinomio de grado “m” puede ser un entero
cualquiera es mejor representación. El procedimiento es similar al de la línea
recta:
2
1
2
2110
2
1
......
n
i
i
m
imi
n
i
ii yxkxkxkkyYS
(4-15)
donde n= número de datos
m
imiii xkxkxkkY .........2
210 (4-16)
Se desea que S sea un mínimo, observe que:
mkkkkSS ,.......,, 210 (4-17)
es decir, que S es función de (m+1) variables.

xlvi
Para minimizar a S hay que derivar parcialmente esta función e igualar a cero
cada una de las derivadas parciales:
0........21
2
210
0
n
i
i
m
imii yxkxkxkkk
S
(4-18)
0........21
2
210
1
n
i
i
m
imiii yxkxkxkkxk
S
(4-19)
.
.
.
0........21
2
210
n
i
i
m
imii
m
i
m
yxkxkxkkxk
S
(4-20)
Desarrollando las sumatorias dadas en las ecuaciones (4-18) a (4-20) se
obtiene un sistema lineal de ecuaciones:
0.....2
210 i
m
imii yxkxkxknk
0..... 13
2
2
10
ii
m
imiii yxxkxkxkxk
0..... 224
2
3
1
2
0
ii
m
imiii yxxkxkxkxk
0.....2
2
1
10
i
m
i
mm
im
m
i
m
i
m
i yxxkxkxkxk

xlvii
donde Σ representa la sumatoria desde 1i hasta .ni
Este sistema lineal de ecuaciones puede escribirse de la siguiente manera:
m
i
m
i
m
i
m
i
m
iii
m
iiii
m
iii
xxxx
xxxx
xxxx
xxxn
221
24
1
32
132
2
...
.......
.......
.......
...
...
...
mk
k
k
k
.
.
.
2
1
0
i
m
i
ii
ii
i
yx
yx
yx
y
.
.
.
2
(4-21)
A K B
El sistema matricial (4-21) puede escribirse de la siguiente manera:
BKA (4-22)
Este sistema matricial se puede resolver usando entre otros, el método de
eliminación de Gauss-Jordan y los métodos iterativos que se discuten en las
secciones (v) y (VI) respectivamente.

xlviii
V.- MÉTODO DE ELIMINACIÓN DE GAUSS-JORDAN PARA RESOLVER
LAS ECUACIONES SIMULTÁNEAS LINEALES.
5.1. Introducción.
5.2. Problema.

xlix
5.1. Introducción.
Los métodos para resolver un sistema lineal como el que se presenta en
ecuaciones (4-21) y (4-22) pueden dividirse en dos tipos:
A. El método directo y,
B. El método iterativo.
El método directo permite obtener una solución exacta; sin embargo, tiene la
desventaja de que los cálculos en algunos casos, puede tomar mucho tiempo
de computación.
El método iterativo, como su nombre lo indica, permite obtener soluciones
aproximadas y, en algunos casos, necesita menos tiempo computacional que
el método directo.
Uno de los métodos fundamentales para obtener soluciones directas en el
método de eliminación de Gauss-Jordan . Con el fin de examinar este
método se selecciona un sistemas de tres ecuaciones simultáneas lineales
con tres incógnitas.
5.2. Problema.
Sea el siguiente sistema de tres ecuaciones:
3763 321 xxx

l
359 31 xx (5-1)
4685 321 xxx
este sistemas lineal de ecuaciones puede escribirse así:
685
509
763
3
2
1
x
x
x
4
3
3
(5-2)
La ecuación (5-2) es similar a la ecuación (4-21) de la sección anterior.
Es decir:
BXA
donde:
4
3
3
685
509
763
3
2
1
B
X
X
X
X
A
(5-3)
Es posible unir A con B en una matriz ampliada de la forma siguiente:

li
4685
3509
3763
matriz ampliada (5-4)
El método de Gauss-Jordan se usa para llevar la matriz ampliada a la forma
siguiente:
333
222
111
00
00
00
Ca
Ca
Ca
(5-5)
y la solución buscada es:
1111 acx
2222 acx (5-6)
3333 acx
Este procedimiento es directo y puede programarse para un computador
digital.
El ejemplo numérico se resuelve y simultáneamente se generaliza el método
de Gauss-Jordan mediante un ejemplo alfanumérico.
General Ejemplo
34333231
24232221
14131211
aaaa
aaaa
aaaa
4685
3509
3763

lii
Filas Columnas
Donde k es el número de la fila.
Con el fin de eliminar los coeficientes es necesario seleccionar una fila
pivote. Por ejemplo, para K= 1 se elimina a21 (en el ejemplo numérico es el
número 9).
La nueva fila es:
Segunda fila primera fila
a11 (a21 a22 a23 a24) – a21 (a11 a12 a13 a14)
Observe que:
a11 a21 - a21 a11 = 0, por lo tanto:
General Ejemplo
34333231
242322
14131211
'''0
aaaa
aaa
aaaa
4685
1878540
3763
La nueva segunda fila es el ejemplo numérico se obtiene de la siguiente
manera:
3(9 0 -5 3) - 9(3 -6 7 3) =
(27 0 -15 9) - (27 -54 63 27) =
(0 54 -78 -18)
Observe que la resta se efectúa entre los términos correspondientes.

liii
Este ejemplo fue tomado de la referencia (7), de la página 156. Mostramos el
ejemplo y el método general.
MÉTODO DE ELIMINACIÓN DE GAUSS -JORDAN
General Ejemplo
Matriz dada
34333231
24232221
14131211
aaaa
aaaa
aaaa
4685
3509
3763
Paso 1:
k =1
Línea pivote= 1, elemento pivote= a11
I = 2 1 A) nueva línea 2 =
J = 1, 2, 3, 4 12 2111 líneaalíneaa
34333231
242322
14131211
'''0
aaaa
aaa
aaaa
4685
1878540
3763
I = 3 1 B) nueva línea 3 =
J = 1, 2, 3, 4 13 3111 líneaalíneaa

liv
343332
242322
14131211
'''0
'''0
aaa
aaa
aaaa
271760
1878540
3763
Paso 2:
k =2
Línea pivote= 2, elemento pivote= a’22
2 A) nueva línea 1 =
21 1222 líneaalíneaa
i =1
j = 1, 2, 3, 4
343332
242322
141311
'''0
'''0
''0'
aaa
aaa
aaa
271760
1878540
54900162
2 B) nueva línea 3 =
2'3' 3222 líneaalíneaa
I = 3
J = 1, 2, 3, 4
3433
242322
141311
''''00
'''0
''0'
aa
aaa
aaa
135045000
1878540
54900162

lv
Paso 3:
k =3
Línea pivote= 3, elemento pivote= a’33
3 A) nueva línea 1 =
3'1'' 1333 líneaalíneaa
i =1
j = 1, 2, 3, 4
3433
242322
1411
''''00
'''0
''00''
aa
aaa
aa
135045000
1878540
1458000072900
3 B) nueva línea 2 =
3'2'' 2333 líneaalíneaa
I = 2
J = 1, 2, 3, 4
3433
2422
1411
''''00
''0'0
''00'
aa
aa
aa
135045000
972000243000
1458000072900
Solución:

lvi
''
141
''
11 axa 21 x
''
242
''
22 axa 41 x
''
343
''
33 axa 31 x
VI.- METODOS ITERATIVOS APLICADOS A SISTEMAS DE ECUACIONES
LINEALES
6.1. Introducción.
6.2. Método iterativo de Gauss-Seidel.
6.3. Problemas.

lvii
6.1. Introducción.
Los métodos directos son de utilidad cuando el número de ecuaciones es del
orden de (40) ó menor*. En las páginas 38 a 43 se discutió el método directo
de Gauss-Jordan que es uno de los métodos directos más usados.
Los métodos iterativos son más apropiados que los directos, cuando el
número de ecuaciones lineales es mayor de cuarenta. Dos de los métodos
iterativos son más apropiados que los directos, cuando el número de
ecuaciones lineales es mayor de cuarenta. Dos de los métodos iterativos de
uso más frecuente son el Jacobi y el de Gauss-Seidel. La selección del
método directo o indirecto también depende de las veces que se deben
resolver las ecuaciones.
6.2. Método iterativo de Gauss-Seidel.
Sea el sistema de ecuaciones lineales:
1131321211 ....... cxaxaxaxa nni
2232322221 ....... cxaxaxaxa nni
.
.
nnnnnnin cxaaxaxaxa .......33221

lviii
Despejando x1 de la primera ecuación, x2 de la segunda ecuación, etc, nos
queda:
*Hay muchas variantes de este criterio, por ejemplo, en la solución de
problemas de yacimiento mediante simulación numérica se utiliza el método
de Gauss-Jordan hasta con 29 incognitas.
11
113132121
.....
a
cxaxaxax nn
22
223231212
.....
a
cxaxaxax nn
(6-2)
.
.
.
nn
nnnnnnn
a
cxaxaxax
.....2211
El proceso se indica suponiendo un conjunto de valores para las incógnitas
x1, x2,.....xn, procediéndose a calcular un nuevo conjunto de valores para las
incógnitas. En cada paso se toma el último valor calculado para cada
variable. El proceso se continúa hasta lograr satisfacer algún criterio de
convergencia. Por ejemplo, uno de esos criterios es:
1. La suma de los valores absolutos de las desviaciones relativas de dos
conjuntos sucesivos de valores de las incógnitas debe ser menor o
igual a la desviación permitida:
;1
1,,
n
n
knkn xx
: (desviación permitida)

lix
donde k: número de pasos.
n: número de ecuaciones.
2. Si no se logra convergencia, los cálculos se efectúan hasta un valor
prefijado de iteraciones. También se pueden usar criterios adicionales:
número de páginas, tiempo, etc. (Ver por ejemplo sección 2.3).
6.3. Problema n° 1
Con el fin de familiarizarse con el método se resuelve el siguiente problema.
Se pide:
Obtener la solución aproximada del siguiente sistema de ecuaciones usando
el método de Gauss-Seidel.
53 21 xx
52 21 xx
Suponga un error e= 0,9 (desviación permitida)
Solución:
3
5
3
21
xx
y 2
5
2
12
xx
El proceso se inicia suponiendo .021 xx Los resultados son tabulados en
la tabla n° 6-1.
Tabla n° 6-1
Resultados del problema n° 1
Paso k x1 x2
2
1
1,,
n
knkn xx

lx
1 0 0 -
2 5/3 5/3 10/3
3 10/9 35 1/185/18
Para k= 3 15/18<e donde e=0,9
Por lo tanto, satisface el criterio de convergencia. La solución exacta es:
11 x y 22 x
La iteración de Gauss-Seidel no siempre converge. Así, Conte y Boor anotan
(3) en la página 179 de su libro que dicha iteración converge si la matriz de
coeficiente A es diagonalmente dominante por filas 0, si A es positiva
simétrica y definida. Por definición una matriz dominante es:
n
iji
ijii aa1
donde:
n= número de filas.
Observe que aii son los términos diagonales. Por ejemplo, en el siguiente
sistema de ecuaciones:
1210 321 xxx
1210 321 xxx
1210 321 xxx
se tiene que:
en la primera fila 1110
en la segunda fila 1110

lxi
en la tercera fila 1110
La matriz es diagonalmente dominante y se puede usar Gauss-Seidel.
VII.- INTEGRACIÓN NUMÉRICA.
7.1 Métodos de integración numérica.
7.1.1 Integración numérica usando cuadraturas gaussianas.
7.1.2 Integración numérica: Regla de Newton-Cotes
7.1.2.1 Regla de trapecio.
7.1.2.2 Regla de trapecio compuesta.
7.1.2.3 Regla simple de Simpson.
7.1.2.4 Regla compuesta de Simpson.
7.1.2.5 Comentarios adicionales.