Mec Cuatro Barras
20
31 2.3 MECANISMO DE CUATRO BARRAS El eslabonamiento de cuatro barras es uno de los mecanismos más utilizados y más sencillos, ejemplos: Máquina de pruebas de solidez del color en telas: Se observa las curvas de acoplador superpuestas figura 2.9 figura 2.9 Máquina de pruebas de solidez del color en telas Mecanismo de Watt de cuatro barras en la suspensión trasera de un auto figura 2.10 figura 2.10 Mecanismo de Watt Eslabonamiento de cuatro barras para controlar la oscilación de la pala de una cargadora frontal
-
Upload
henry-geovanny-avila -
Category
Documents
-
view
218 -
download
0
Transcript of Mec Cuatro Barras
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 1/20
31
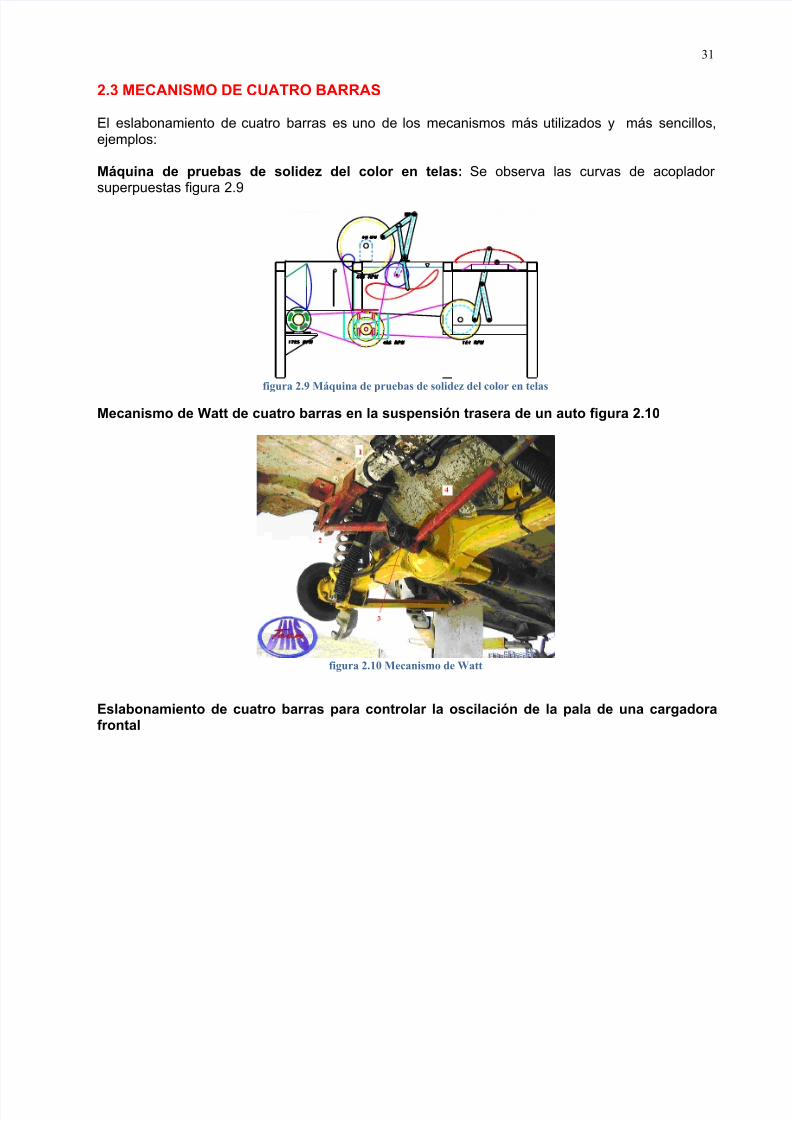
2.3 MECANISMO DE CUATRO BARRAS
El eslabonamiento de cuatro barras es uno de los mecanismos más utilizados y más sencillos,ejemplos:
Máquina de pruebas de solidez del color en telas: Se observa las curvas de acopladorsuperpuestas figura 2.9
figura 2.9 Máquina de pruebas de solidez del color en telas
Mecanismo de Watt de cuatro barras en la suspensión trasera de un auto figura 2.10
figura 2.10 Mecanismo de Watt
Eslabonamiento de cuatro barras para controlar la oscilación de la pala de una cargadorafrontal
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 2/20
32
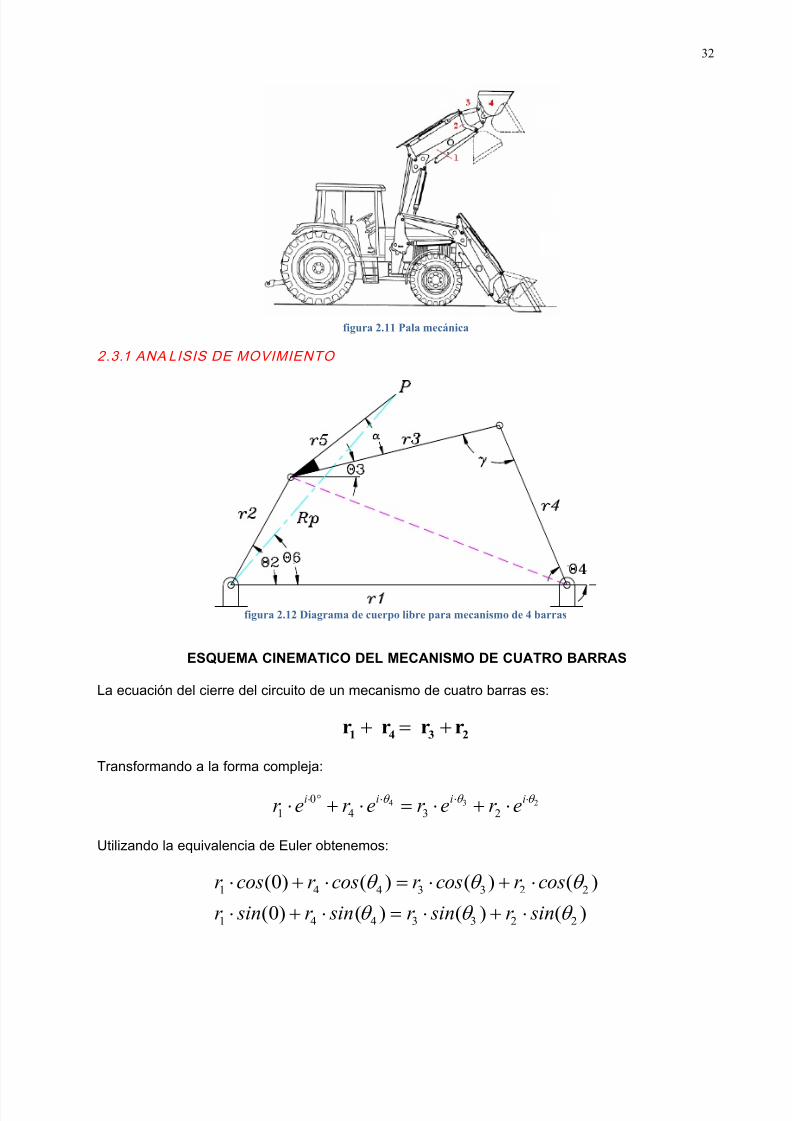
figura 2.11 Pala mecánica
2.3.1 ANA LISIS DE MOVIMIENTO
figura 2.12 Diagrama de cuerpo libre para mecanismo de 4 barras
ESQUEMA CINEMATICO DEL MECANISMO DE CUATRO BARRAS
La ecuación del cierre del circuito de un mecanismo de cuatro barras es:
1 4 3 2r r r r
Transformando a la forma compleja:
34 20
1 4 3 2
ii i ir e r e r e r e
Utilizando la equivalencia de Euler obtenemos:
1 4 4 3 3 2 2
1 4 4 3 3 2 2
) ) )
) )
(0) ( (
)
(
(0) ( ( (
r cos r cos r cos r cos
r sin r sin r sin r sin

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 3/20
33
En este caso tenemos una ecuación no lineal donde las variables dependientes o incógnitas son:
3 y 4 , la variable independiente es 2 y las constantes son: r 1 , r 2, r 3, y r 4 .
3 3 1 4 4 2 2
3 3 4 4 2 2
( ( (
( (
)
) )(
) )
)
r cos r r cos r cos
r sin r sin r sin
Si elevamos al cuadrado y sumamos obtenemos:
2 2 2 2
3 1 2 4 1 2 2 1 4 4 2 4 4 2 2 4 2 ( 2 () ) (2 ) ) ) )( ( )( (r r r r r r cos r r cos r r cos cos sin sin
2 2 2 2
1 2 4 3 1 14 2 2 4
2 4 4 2
cos( ) cos( ) cos( )2
r r r r r r
r r r r
Utilizando las nuevas constantes:
2 2 2 2
1 2 4 3
3
2 42
r r r r k
r r
12
4
11
2
r k
r
r k
r
Obtenemos la ecuación de Freudenstein que se utilizara en síntesis de mecanismos:
4 2 3 2 2 1 4 ( ) ) )( (cos k k cos k cos ó
4 2 2 4 3 2 2 1 4( ( ( () () ) ) ) )(cos cos sen sen k k cos k cos
Para resolver está ecuación utilizamos las siguientes equivalencias conocidas:
4
4
2 4
2(
1
2)
2
tan sen
tan

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 4/20
34
2 4
4
2 4
12
2
1
tan
cos
tan
4
2 tan x
Para simplificar el desarrollo usamos:
4 2
2
4 2
21
1cos
1
x sen x
x
x
Reemplazando se obtiene una ecuación de segundo grado.
2 2 2
2 2 3 2 2 1) ) ( ))( 1 ( 2 ( 1 1cos x sen x k k cos x k x
2 0 A x B x C
Donde:
La solución para x o tan (4 / 2) es:
4 2 2 atanB 2 B 2 2 4 A 2 C 2
2 A 2
Donde el signo – del radical se utiliza para la configuración abierta y el signo + para la configuracióncruzada.
A 2 cos 2 k1 k2 cos 2 k
B 2 2 sin 2
C 2 k1 k2 1( ) cos 2 k

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 5/20
35
Procediendo de igual manera pero eliminando 4 obtenemos la ecuación para 3
3 2 2 atanE 2 E 2 2
4 D 2 F 2
2 D 2
Donde:
k 5
r 4
2r 1
2r 2
2r 3
2
..2 r 2 r
3 k4 = r 1/r 3
Donde el signo – del radical se utiliza para la configuración abierta y el signo + para la configuracióncruzada:
2.3.2 ANALISIS DE LA TRAYECTORIA DE UN PUNTO DEL ACOPLADOR
La ecuación vectorial del acoplador se puede escribir como:
32
5
)(
2 i i Rp r e r e
Siendo las componentes en x y y
Con dos ejercicios de aplicación vamos a ejemplificar la importancia de la curva de acoplador
1. Ejercicio de Aplicación: Diseñar un mecanismo transportador de viga viajera con las siguientesmedidas
En primer lugar necesitamos un mecanismo manivela oscilador de Grashof
. r 2 + r 1 < r 3 + r 4 ; 233+100 < 222+206 ; 333 < 408
D 2 cos 2 k1 k4 cos 2 k
E 2 2 sin 2
F 2 k1 k4 1( ) cos 2 k
Rpx 2 r2 cos 2 r5 cos 3 2 3
180
Rpy 2 r2 sin 2 r5 sin 3 2 3
180
r1 222 r2 100 r3 20 r4 233
k1r1
r2 k2
r1
r4 k3
r12
r22
r42
r32
2 r2 r4 k5
r42
r12
r22
r32
2 r2 r3 k4
r1
r3
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 6/20
36
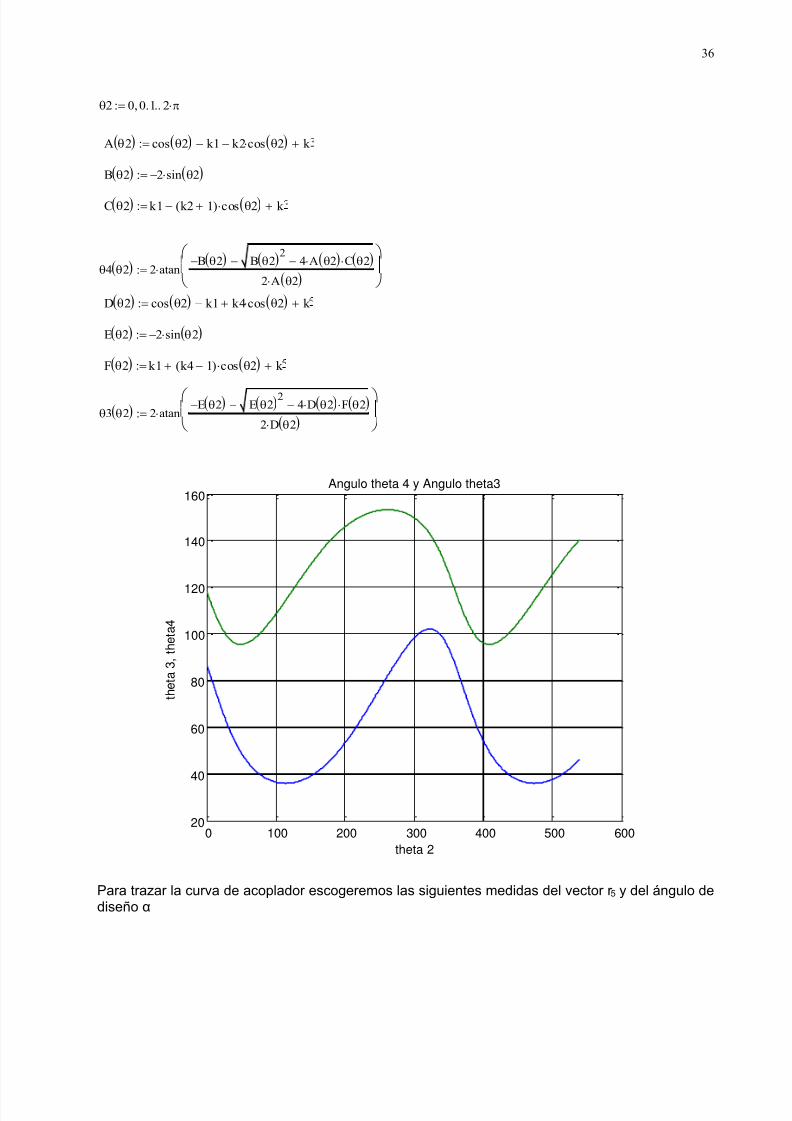
2 0 0.1 2
4 2 2 atanB 2 B 2 2
4 A 2 C 2
2 A 2
3 2 2 atanE 2 E 2 2
4 D 2 F 2
2 D 2
Para trazar la curva de acoplador escogeremos las siguientes medidas del vector r 5 y del ángulo dediseño α
0 100 200 300 400 500 60020
40
60
80
100
120
140
160Angulo theta 4 y Angulo theta3
theta 2
theta
3,theta4
A 2 cos 2 k1 k2 cos 2 k
B 2 2 sin 2
C 2 k1 k2 1( ) cos 2 k
D 2 cos 2 k1 k4 cos 2 k
E 2 2 sin 2
F 2 k1 k4 1( ) cos 2 k
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 7/20
37
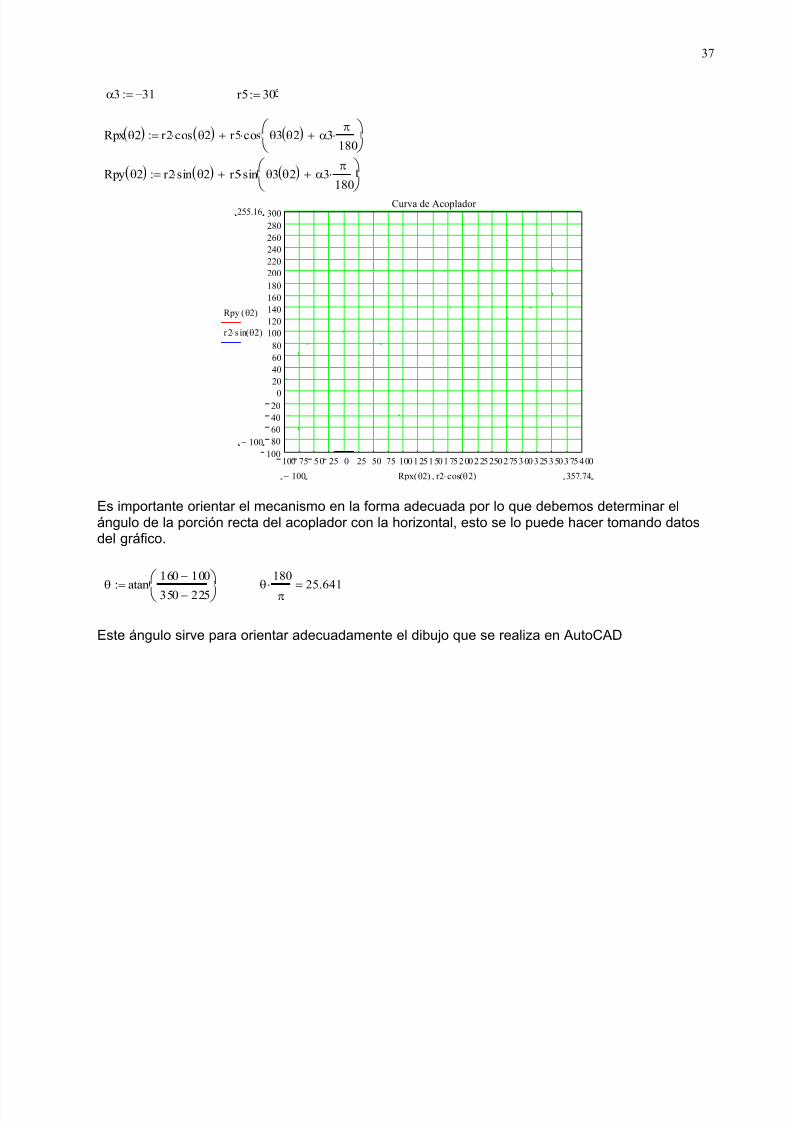
Es importante orientar el mecanismo en la forma adecuada por lo que debemos determinar elángulo de la porción recta del acoplador con la horizontal, esto se lo puede hacer tomando datosdel gráfico.
Este ángulo sirve para orientar adecuadamente el dibujo que se realiza en AutoCAD
100 75 50 25 0 25 50 75 100125150175200225250275300325350375400100
80
60
40
20
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
300Curva de Acoplador
255.16
100
Rpy 2( )
r2 s in 2( )
357.74100 Rpx 2( ) r2 cos 2( )
3 31 r5 30
Rpx 2 r2 cos 2 r5 cos 3 2 3
180
Rpy 2 r2 sin 2 r5 sin 3 2 3
180
atan160 100
350 225 180
25.641

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 8/20
38
En base de este diagrama se efectúa la simetría y se rota 25.641o
Necesitamos un movimiento paralelo para mover la viga viajera, lo cual se lo puede hacer de dosformas, duplicando el mecanismo o utilizando mecanismos cognados, la forma más sencilla esduplicando el mecanismo.
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 9/20
39
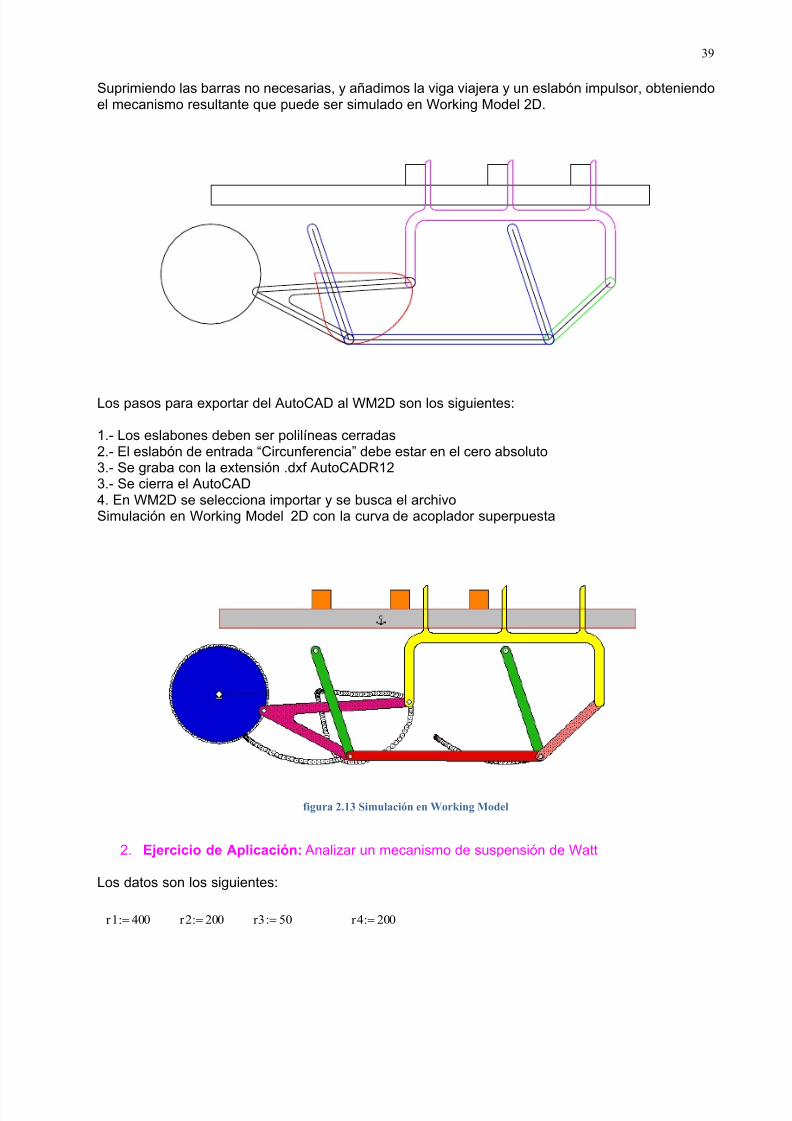
Suprimiendo las barras no necesarias, y añadimos la viga viajera y un eslabón impulsor, obteniendoel mecanismo resultante que puede ser simulado en Working Model 2D.
Los pasos para exportar del AutoCAD al WM2D son los siguientes:
1.- Los eslabones deben ser polilíneas cerradas2.- El eslabón de entrada “Circunferencia” debe estar en el cero absoluto 3.- Se graba con la extensión .dxf AutoCADR123.- Se cierra el AutoCAD4. En WM2D se selecciona importar y se busca el archivoSimulación en Working Model 2D con la curva de acoplador superpuesta
figura 2.13 Simulación en Working Model
2. Ejercicio de Aplicación: Analizar un mecanismo de suspensión de Watt
Los datos son los siguientes:
r1 400 r2 200 r3 50 r4 200
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 10/20
40
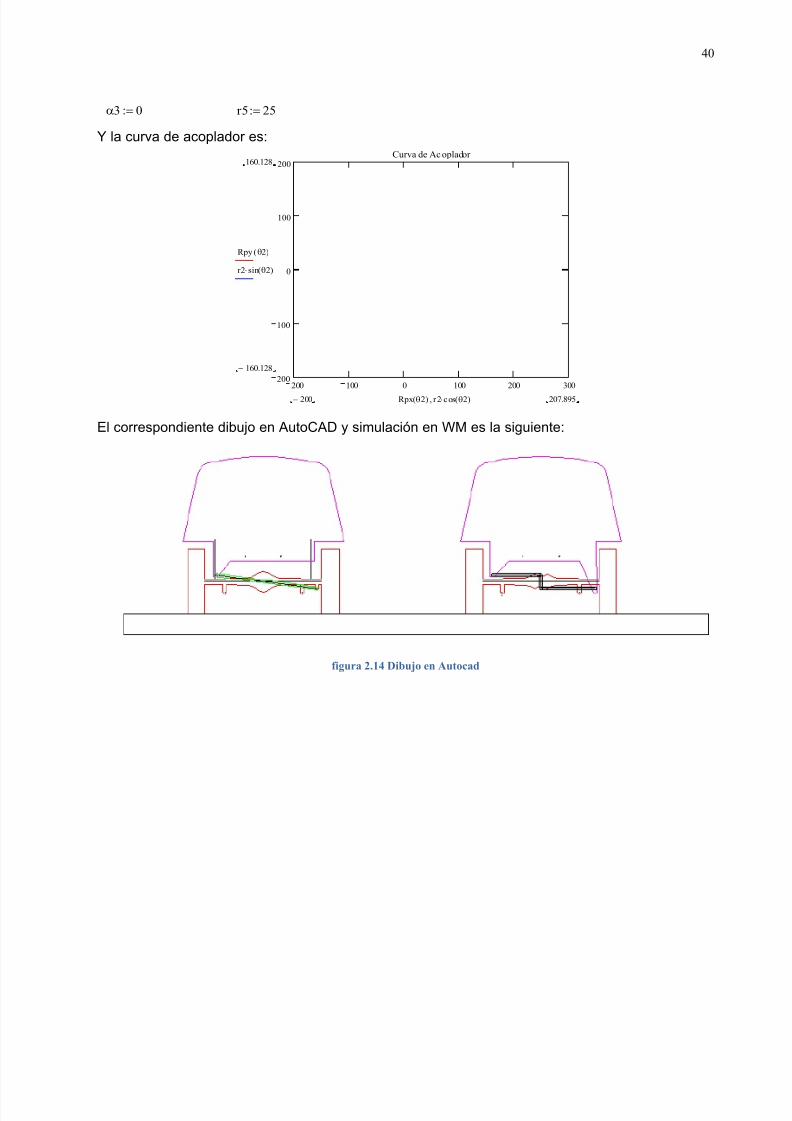
Y la curva de acoplador es:
El correspondiente dibujo en AutoCAD y simulación en WM es la siguiente:
figura 2.14 Dibujo en Autocad
200 100 0 100 200 300
200
100
0
100
200Curva de Acoplador
160.128
160.128
Rpy 2( )
r2 sin 2( )
207.895200 Rpx 2( ) r2 cos 2( )
3 0 r5 25

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 11/20
41
figura 2.15 Simulación en working model
Claramente apreciamos que el Mecanismo de Watt sujeta mejor la carrocería, por lo que es muyutilizado en competencias.
2.3.3. ANA LISIS DE VELOCIDAD
Efectuamos la derivación de la ecuación de cierre del circuito
2 3 4
2 3 1 4
i iir e r e r r e
2 3 4
2 2 3 3 4 4
i iii r e i r e i r e
Igualando la parte real e imaginaria obtenemos:
3 3 3 4 4 4 2 2 2
3 3 3 4 4 4 2 2 2
( ( (
( (
) ) )
cos ) cos ) c (os )
r sen r sen r sen
r r r
Resolviendo las dos ecuaciones lineales simultáneas obtenemos:
2 2 4 2
3 2 2
3 4 2 3 2
2 3 2 2
4 2 2
4 3 2 4 2
r sen
r sen
r sen
r sen
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 12/20
42
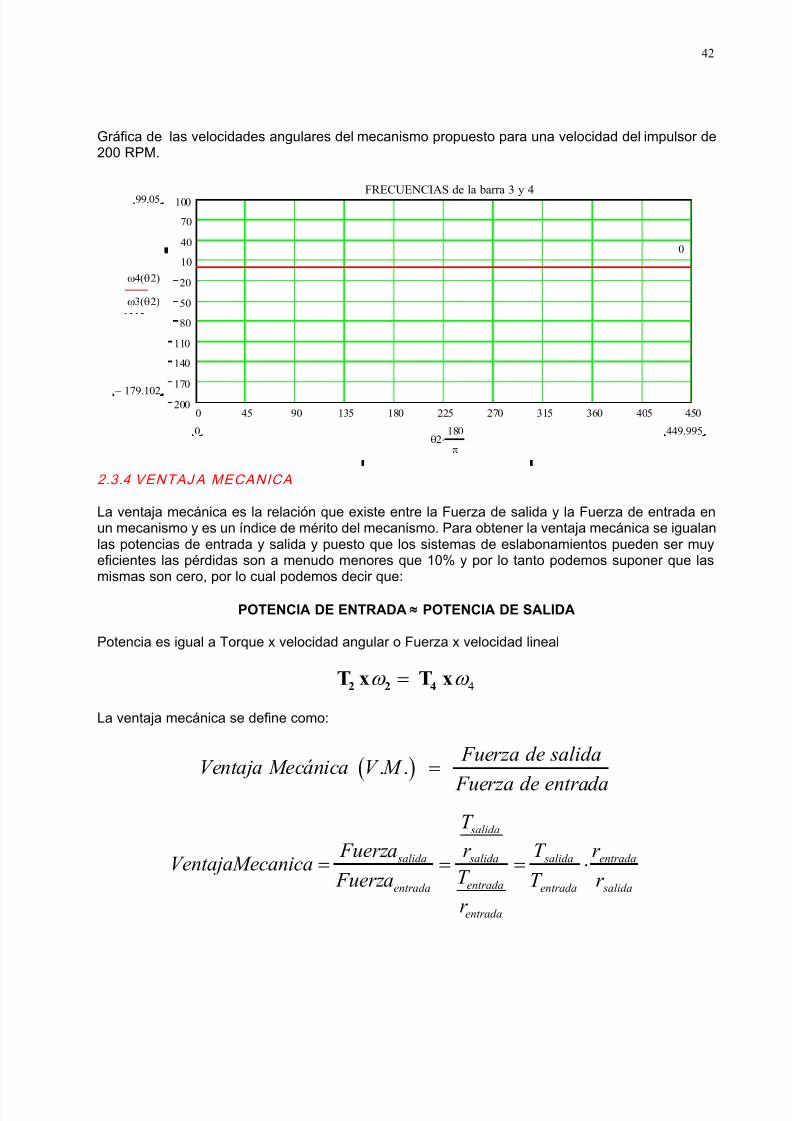
Gráfica de las velocidades angulares del mecanismo propuesto para una velocidad del impulsor de200 RPM.
2.3.4 VENTAJA MECANICA
La ventaja mecánica es la relación que existe entre la Fuerza de salida y la Fuerza de entrada enun mecanismo y es un índice de mérito del mecanismo. Para obtener la ventaja mecánica se igualanlas potencias de entrada y salida y puesto que los sistemas de eslabonamientos pueden ser muyeficientes las pérdidas son a menudo menores que 10% y por lo tanto podemos suponer que las
mismas son cero, por lo cual podemos decir que:
POTENCIA DE ENTRADA POTENCIA DE SALIDA
Potencia es igual a Torque x velocidad angular o Fuerza x velocidad lineal
4 2 2 4T x T x
La ventaja mecánica se define como:
. .
Fuerza de salidaVentaja Mecánica V M
Fuerza de entrada
salida
salida salida salida entrada
entradaentrada entrada salida
entrada
T
Fuerza r T r VentajaMecanica
T Fuerza T r
r
0 45 90 135 180 225 270 315 360 405 450200170
140
110
80
50
20
10
40
70
100 FRECUENCIAS de la barra 3 y 499.05
179.102
0
4 2( )
3 2( )
449.99502
180

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 13/20
43
4 3 2 4 22
4 2 3 2 2
entrada entrada entrada entrada
salida salida salida salida
r senr r r VM
r r r r sen
Determinada la VM se puede hallar la Fuerza de entrada si se conoce la Fsalida
Como podemos observar la V. M. máxima se obtiene cuando 2 = 3 siendo en este caso igual a ,o cuando el impulsor se alinea con el acoplador, esta posición se denomina volquete. En estaposición funcionan todos los mecanismos que multiplican las fuerzas como:
PrensasTrituradoras de piedras (figura 2.17)Mecanismos de cierre de moldes en inyectorasPlayos de presión (figura 2.16)Mordazas de Jics de soldadura
figura 2.16 Playo de presión
figura 2.17 Triturador de roca

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 14/20
44
figura 2.18 Cortador de varillas
La ventaja mecánica se reduce a cero cuando 4 = 3 o cuando el acoplador y el seguidor estánalineados. En este punto el mecanismo simplemente no funciona. El ángulo entre el acoplador y el
seguidor se llama ángulo de transmisión y para que un mecanismo tenga buenas características
de funcionamiento este ángulo no debe ser menor a 300, ni mayor a 1500
Esto significa que el ángulo máximo de oscilación del seguidor es de 120o
La ventaja mecánica puede ser obtenida en forma gráfica o analítica :
A partir de las expresiones analíticas analizadas anteriormente se puede buscar relacionesgeométricas para determinar gráficamente la ventaja mecánica
figura 2.19 Determinación gráfica de la ventaja mecánica
Entonces la ω2 / ω4 estaría dada por la relación entre los segmentos perpendiculares, trazadosdesde los polos fijos hasta la barra 3 o estableciendo triángulos semejantes por la relación O4I / O2I
figura 2.20
Y la ventaja mecánica en un eslabonamiento de cuatro barras puede hallarse entonces a partir dela siguiente expresión:

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 15/20
45
4
2
entrada
salida
r O I VM
O I r
3. Ejercicio de Aplicación: La figura 2.21 muestra una mordaza de cuatro barras utilizada para
sostener una pieza de trabajo en su lugar, sujetándola en D. O2A = 70, O2C = 138, AB = 35,O4B = 34, O4D = 82, O2O4 = 48 mm. El eslabón 2 se encuentra a 104 0 en la posiciónindicada. El eslabonamiento se agarrotara cuando el eslabón 2 alcance 900.
a. Calcule su ventaja mecánica en la posición mostradab. Calcule y grafique su ventaja mecánica como una función del ángulo del eslabón AB
a medida que el eslabón 2 gira de 120 a 900
Debemos dibujar el mecanismo en AutoCAD para tomar las medidas correspondientes:
figura 2.21 Mordaza de cuatro barras
Aplicando la formula anterior tenemos:
VMO4I
O2I
r entrada
r salida
71.71
23.71
138
81.05 5.1
Se puede posteriormente variar las medidas para tener una mejor V.M.
Para efectuar determinar la V.M. por el método analítico orientamos el mecanismo en la formaconvencional que como vemos corresponde a la configuración cruzada.
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 16/20
46
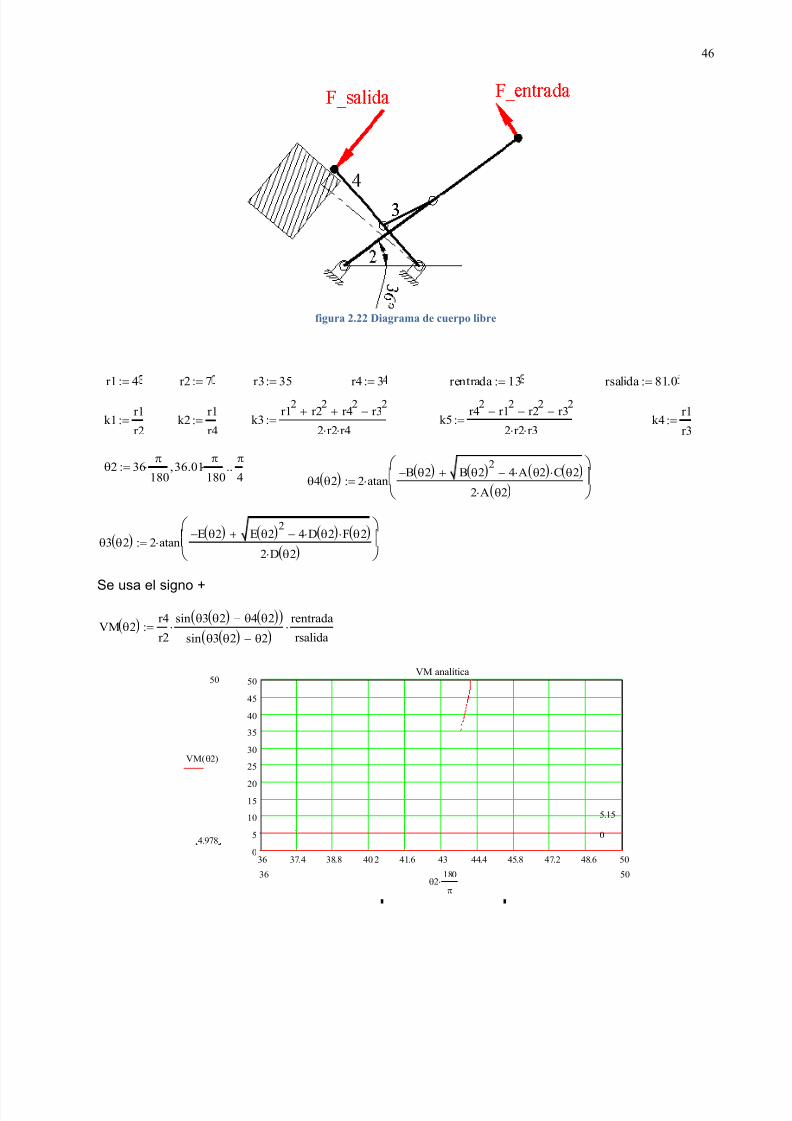
figura 2.22 Diagrama de cuerpo libre
4 2 2 atanB 2 B 2
24 A 2 C 2
2 A 2
3 2 2 atanE 2 E 2 2
4 D 2 F 2
2 D 2
Se usa el signo +
VM 2 r4
r2
sin 3 2 4 2
sin 3 2 2
rentrada
rsalida
36 37.4 38.8 40.2 41.6 43 44.4 45.8 47.2 48.6 500
5
10
15
20
25
30
35
40
45
50VM analítica
50
4.978
5.15
0
VM 2( )
50362
180
r1 4 r2 7 r3 35 r4 3 rentrada 13 rsalida 81.0
k1r1
r2 k2
r1
r4 k3
r12
r22
r42
r32
2 r2 r4 k5
r42
r12
r22
r32
2 r2 r3 k4
r1
r3
2 36
180 36.01
180
4
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 17/20
47
Como se observa la ventaja tenderá al infinito aproximadamente a unos 44.4o y coincide también elvalor que obtuvimos gráficamente de 5.15
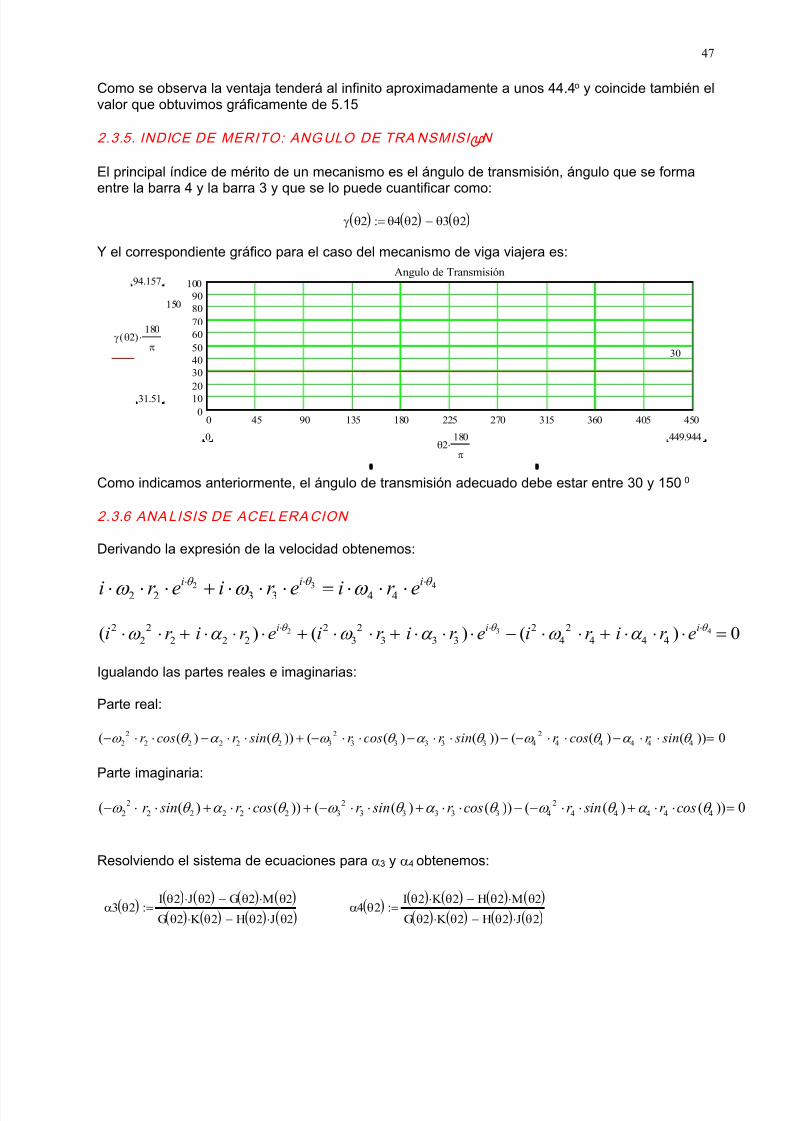
2.3.5. INDICE DE MERITO: ANGULO DE TRANSMISIÓN
El principal índice de mérito de un mecanismo es el ángulo de transmisión, ángulo que se forma
entre la barra 4 y la barra 3 y que se lo puede cuantificar como:
2 4 2 3 2
Y el correspondiente gráfico para el caso del mecanismo de viga viajera es:
Como indicamos anteriormente, el ángulo de transmisión adecuado debe estar entre 30 y 150 0
2.3.6 ANALISIS DE ACELERACION
Derivando la expresión de la velocidad obtenemos:
32 42 2 3 3 4 4
ii ii r e i r e i r e
32 42 2 2 2 2 2
2 2 2 2 3 3 3 3 4 4 4 4( ) ( ) ( ) 0ii ii r i r e i r i r e i r i r e
Igualando las partes reales e imaginarias:
Parte real:
2 2 2
2 2 2 2 2 2 3 3 3 3 3 3 4 4 4 4 4 4( ( (( ) )) ( ) ))( ( (( ) )) 0r cos r sin r cos r sin r cos r sin
Parte imaginaria:
2 2 2
2 2 2 2 2 2 3 3 3 3 3 3 4 4 4 4 4 4( ( (( ) )) ( ) ))( ( (( ) ))r sin r cos r sin r cos r sin r cos
Resolviendo el sistema de ecuaciones para 3 y 4 obtenemos:
0 45 90 135 180 225 270 315 360 405 4500
1020
30
40
50
60
70
80
90
100Angulo de Transmisión
94.157
31.51
30
150
2( )180
449.94402
180
3 2 I 2 J 2 G 2 M 2
G 2 K 2 H 2 J 2 4 2 I 2 K 2 H 2 M 2
G 2 K 2 H 2 J 2

8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 18/20
48
Donde:
Elsiguiente es el gráfico de la aceleración para el mecanismo propuesto:
2.3.7 ANALISIS DE ACELERACIONES ABSOLUTAS DE CENTROS DE GRAVEDAD
Como un ejemplo calcularemos la aceleración del centro de masas del acoplador suponiendo quese halle en el centro de la barra
El vector de posición al centro de masas es:
2 3
2 30.5i ir e r e 3Rg
La velocidad lineal del centro de masas es:
32
2 2 3 3 0.5i ii r e i r e
3Vg
La aceleración del centro de masas es:
322 2 2 2
2 2 2 2 3 3 3 3( ) 0.5 ( )i ii r i r e i r i r e 3Ag
Suponiendo velocidad angular constante en el impulsor 2 = 0
322 2
2 2 3 3 3 3( ) ( )0.5
i ir e r i r e
3
Ag
0 45 90 135 180 225 270 315 360 405 4501 10
5
8.5 104
7 104
5.5 104
4 104
2.5 104
1 104
5000
2 104
3.5 104
5 104
Aceleraciones angulares de 3 y 4
4.921 104
5.76 104
0
3 2( )
4 2( )
449.94402
180
G 2 r4 sin 4 2
H 2 r3sin 3 2
I 2 22
r2 cos 2 2 r2 sin 2 3 2 2r3 cos 3 2 4 2 2
r4 cos 4 2
J 2 r4 cos 4 2 K 2 r3 cos 3 2
M 2 2
2
r2 sin 2 2 r2 cos 2 3 2
2
r3 sin 3 2 4 2
2
r4 sin 4 2
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 19/20
49
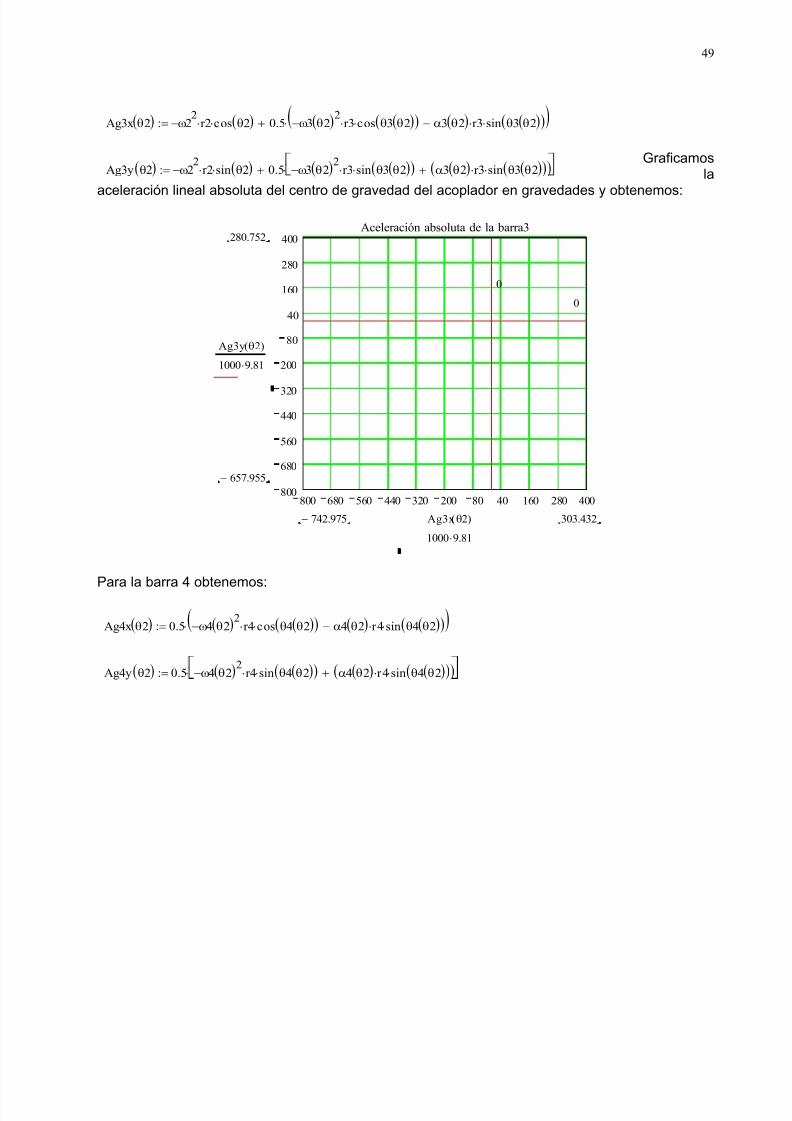
Graficamosla
aceleración lineal absoluta del centro de gravedad del acoplador en gravedades y obtenemos:
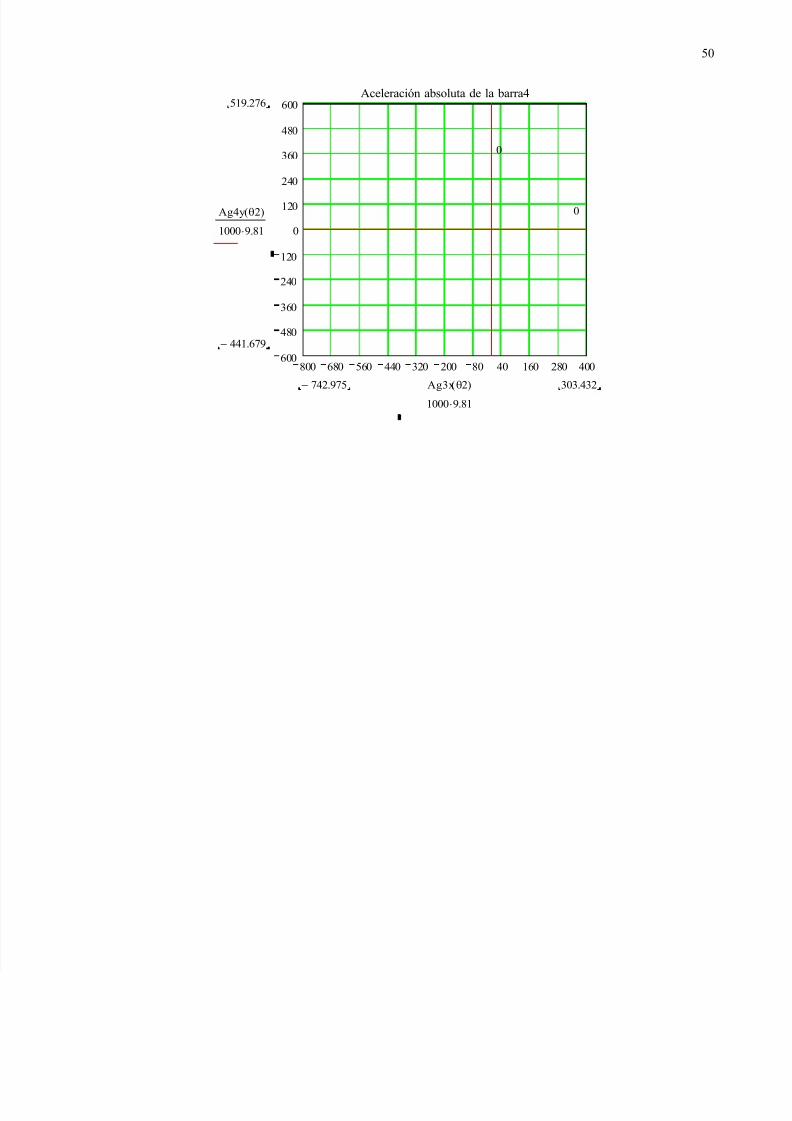
Para la barra 4 obtenemos:
800 680 560 440 320 200 80 40 160 280 400800
680
560
440
320
200
80
40
160
280
400Aceleración absoluta de la barra3
280.752
657.955
0
Ag3y 2( )
1000 9.81
303.432742.975
0
Ag3x 2( )
1000 9.81
Ag3x 2 22
r2 cos 2 0.5 3 2 2 r3 cos 3 2 3 2 r3 sin 3 2
Ag3y 2 22
r2 sin 2 0.5 3 2 2
r3 sin 3 2 3 2 r3 sin 3 2
Ag4x 2 0.5 4 2 2 r4 cos 4 2 4 2 r4 sin 4 2
Ag4y 2 0.5 4 2 2 r4 sin 4 2 4 2 r4 sin 4 2
8/15/2019 Mec Cuatro Barras
http://slidepdf.com/reader/full/mec-cuatro-barras 20/20
50
800 680 560 440 320 200 80 40 160 280 400600
480
360
240
120
0
120
240
360
480
600Aceleración absoluta de la barra4
519.276
441.679
0Ag4y 2( )
1000 9.81
303.432742.975
0
Ag3x 2( )1000 9.81