
MÁQUINAS SIMPLES UNIDAD 6 - data.over-blog...
17
MÁQUINAS SIMPLES UNIDAD 6 TECHNOLOGIES IES MIGUEL ESPINOSA 2012/2013 INDICE 1. INTRODUCCIÓN 2. LA POLEA 3. LA PALANCA 4. EL PLANO INCLINADO 5. EL TORNO 6. TRANSMISIÓN POR ENGRANAJE 7. TRANSMISIÓN POR CADENA 8. TRANSMISIÓN POR CORREA http://concurso.cnice.mec.es/cnice2006/material107/index.htm
Transcript of MÁQUINAS SIMPLES UNIDAD 6 - data.over-blog...

MÁQUINAS SIMPLESUNIDAD 6
TECHNOLOGIESIES MIGUEL ESPINOSA
2012/2013
INDICE
1. INTRODUCCIÓN2. LA POLEA3. LA PALANCA4. EL PLANO INCLINADO5. EL TORNO6. TRANSMISIÓN POR ENGRANAJE7. TRANSMISIÓN POR CADENA8. TRANSMISIÓN POR CORREA
http://concurso.cnice.mec.es/cnice2006/material107/ index.htm
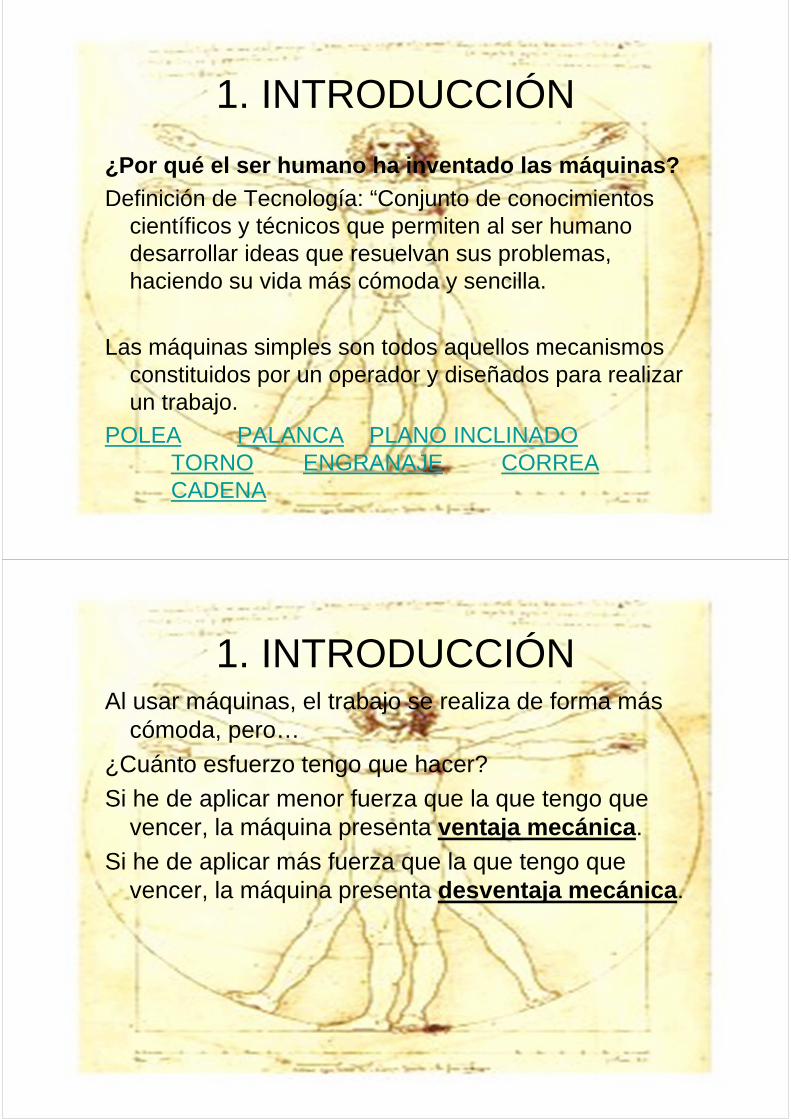
1. INTRODUCCIÓN
¿Por qué el ser humano ha inventado las máquinas?Definición de Tecnología: “Conjunto de conocimientos
científicos y técnicos que permiten al ser humano desarrollar ideas que resuelvan sus problemas, haciendo su vida más cómoda y sencilla.
Las máquinas simples son todos aquellos mecanismos constituidos por un operador y diseñados para realizar un trabajo.
POLEA PALANCA PLANO INCLINADOTORNO ENGRANAJE CORREACADENA
1. INTRODUCCIÓNAl usar máquinas, el trabajo se realiza de forma más
cómoda, pero…¿Cuánto esfuerzo tengo que hacer?Si he de aplicar menor fuerza que la que tengo que
vencer, la máquina presenta ventaja mecánica .Si he de aplicar más fuerza que la que tengo que
vencer, la máquina presenta desventaja mecánica .

2. LA POLEALa polea es un disco circular con una llanta en su perfil y
que gira sobre su centro para transmitir una fuerza.Se usa para elevar cargas de forma cómoda.
La polea simple pretende elevar una Resistencia (R ) mediante la aplicación de una fuerza (F).
La unidad de la Fuerza o Resistencia es el Newton (N) o el kilogramo (kg).
Las poleas simples no tienen ventaja mecánica, por lo que la Fuerza a aplicar será como mínimo igual a la Resistencia a vencer: F = R
2. LA POLEALOS POLIPASTOS O TRENES DE POLEAS
Un polipasto es una combinación de poleas fijas y móviles recorridas por una sola cuerda que tiene uno de sus extremos anclados a un punto fijo.
Se usan para elevar cargas con un esfuerzo menor.
� Presentan ventaja mecánica.

2. LA POLEAPolea fija: Solo gira, modificando la
dirección de la Fuerza.Polea móvil:Gira y se desplaza
verticalmente, proporcionando ventaja mecánica.
2. LA POLEALa ganancia mecánica y el desplazamiento van en
función inversa.La Fuerza a realizar depende de la combinación
realizada entre poleas fijas y móviles.
F = R / 2 F = R / 3 F = R / 4F = R / 2

2. LA POLEAPara solucionar polipastos aplicaremos la siguiente
ecuación:n: número de poleas móviles
F = R / 2n
F = R / 2 F = R / 3 F = R / 4F = R / 2
3. LA PALANCALa palanca es una máquina simple formada o
compuesta por una barra rígida que oscila sobre un punto de apoyo o fulcro utilizada para elevar cargas.
En la palanca se deben distinguir el punto de apoyo o fulcro, la Resistencia y la Fuerza, y en función de la disposición de estos 3 elementos sobre la barra rígida distinguimos 3 tipos de palancas:
1. Palanca de primer grado.2. Palanca de segundo grado.3. Palanca de tercer grado.Las palancas se rigen por la Ley de la Palanca.

3. LA PALANCALey de la Palanca:
F · BF = R · BR
F: Fuerza a aplicar.BF: Brazo de la Fuerza. Distancia del fulcro al punto de
aplicación de la Fuerza.R: Resistencia a vencer.BR: Brazo de la Resistencia. Distancia del fulcro al punto de
aplicación de la Resistencia.
3. LA PALANCACLASIFICACIÓN DE LAS PALANCAS:
PALANCA DE PRIMER GRADO
PALANCA DE SEGUNDO GRADO
PALANCA DE TERCER GRADO

3. LA PALANCA1. PALANCA DE PRIMER GRADOEn la palanca de primer grado, el punto de apoyo o fulcro se
sitúa entre la Fuerza y la Resistencia.
CUMPLE LA LEY DE LA PALANCASi el Brazo de la Fuerza es mayor que el brazo de la resistencia
presentan ventaja mecánica.¿A qué distancia tiene que ponerse Raúl y su gorra azul (80 kg) del punto de apoyo para levantar a Fernando (100 kg) si éste está a 5 m del fulcro?
3. LA PALANCA2. PALANCA DE SEGUNDO GRADOEn la palanca de segundo grado, la Resistencia se sitúa
entre el punto de apoyo y la Fuerza.
Siempre presentan Ventaja Mecánica porque el Brazo de la Fuerza siempre es mayor que el Brazo de la Resistencia.
¿Qué fuerza tendré que hacer en el cascanueces de la figura a 12 cm del punto de apoyo para romper una nuez a 4 cm del apoyo si esta ofrece una resistencia de 10 Newton?

3. LA PALANCA¿Qué fuerza habrá que realizar en la carretilla a 80 cm del
apoyo para levantar una carga de 200 kg situada a 20 cm del apoyo?
3. LA PALANCA3. PALANCA DE TERCER GRADOEn la palanca de tercer grado, la Fuerza se sitúa entre el
punto de apoyo y la Resistencia .
Siempre presentan Desventaja Mecánica porque el Brazo de la Resistencia siempre es mayor que el Brazo de la Fuerza.

3. LA PALANCA¿Qué fuerza tendré que realizar en mi caña de titanio a 15
cm del apoyo para sacar un atún de 300 kg si la caña tiene 60 cm de largo?
4.EL PLANO INCLINADOEl plano inclinado consiste en una superficie plana que forma un ángulo agudo con el suelo y se utiliza para elevar cuerpos a cierta altura.Tiene la ventaja de ser más cómodo que levantar dicho cuerpo verticalmente, aunque a costa de aumentar la distancia recorrida y vencer la fuerza de rozamiento
a
b
F R
F: Fuerza a aplicar
R: Resistencia a vencer
a: altura a salvar
b: base de la rampa

4.EL PLANO INCLINADO¿Cómo calculamos un plano inclinado?
b
F= R · a / b
Cuanto mayor sea la base “b” respecto a la altura a salvar “a”, menor será el esfuerzo a realizar porque el plano inclinado tendrá menos pendiente, y viceversa.
¿Con qué fuerza tendrán que tirar Lucía y Gonzalo para subir por un plano inclinado de 4 m de alto y 12 de base a Hipo, su hipopótamo de 900 kg?
4.EL PLANO INCLINADO¿Hasta que altura podré levantar 100 kg de ladrillo situados a 10 m mediante un plano inclinado si como mucho puedo ejercer una fuerza de 200 kg?

4.1. EL TORNOEl torno es un tambor sobre el que se enrolla una cuerda mediante la acción de un brazo de gran longitud.Se usa para elevar cargas.Los tornos presentan ventaja mecánica debido a la mayor longitud del brazo con respecto al radio del tambor.Las magnitudes a tener en cuenta en el cálculo del torno son:El radio del tambor “r”.El brazo de la manivela que mueve el torno “b”.El Peso “P” y la Fuerza a aplicar “F”.
4.1. EL TORNOSi vemos el torno de perfil lo podemos considerar una polea donde se distinguen dos longitudes, y desde ahí podemos aplicar la ley de la palanca.
F
R
F · b = R · r

4.1. EL TORNOCalcule la fuerza a realizar para elevar 210 kg en un torno cuyo radio del tambor es 30 cm, y con un brazo del torno de 90 cm.
F
R
F · b = R · r
MECANISMOS DE TRANSMISIÓN DE MOVIMIENTO
Los mecanismos de transmisión de movimiento transmiten el movimiento de giro de un eje a otro que pueden estar en contacto (engranaje) o no (transmisión por poleas o cadenas).

5. TRANSMISIÓN POR ENGRANAJES
Dos o más ruedas dentadas en contacto transmiten un movimiento de giro.
La rueda que inicia el movimiento es la rueda motriz o de entrada (1).La rueda que recibe el movimiento es la rueda conducida o de salida (2).Se caracterizan por su velocidad de rotación (n), en revoluciones por minuto (rpm), y su número de dientes (Z), que indica su tamaño.
5. TRANSMISIÓN POR ENGRANAJES
La ecuación que rige la transmisión por engranajes tiene en cuenta estos datos de la siguiente manera:
Z1 · n1 = Z2 · n2
El cociente Z1/Z2 se conoce como relación de transmisión.La rueda de entrada gira en sentido contrario a la rueda de salida � rueda loca.

5. TRANSMISIÓN POR ENGRANAJES
1. Calcule la velocidad de salida en la rueda de 20 dientes si la rueda motora gira a 10 rpm con 4 dientes.
2. ¿A qué velocidad gira una rueda de 10 dientes conectada a otra rueda motora de 50 dientes si esta gira a 6 rpm?
Tipos de dientes y engranajes:
6. TRANSMISIÓN POR CADENA
Transmite un movimiento de rotación entre dos ejes que no están en contacto.La transmisión de movimiento se realiza mediante una cadena que engrana con los dientes de las ruedas dentadas.

6. TRANSMISIÓN POR CADENA
La rueda que inicia el movimiento es la motora o de entrada (1), y la que lo recibe es la de salida o conducida (2).Las ruedas dentadas, al ser engranajes, se caracterizan por su número de dientes (Z), que indica su tamaño, y su velocidad de giro en revoluciones por minuto (n) rpm.
Z1 · n1 = Z2 · n2
6. TRANSMISIÓN POR CADENA
Si circulo en el plato grande la bici, de 42 dientes, y rueda a 12 rpm, ¿a qué velocidad irá el piñón pequeño de 6 dientes?
Si subo un piñón y engrano el de 18 dientes, ¿a qué velocidad irá? ¿mayor o menor? ¿por qué?

7. TRANSMISIÓN POR CORREA
Transmite el movimiento de giro entre dos poleas que no están en contacto a través del rozamiento que provoca una correa que las une.Se caracteriza por su tamaño, expresado por el diámetro de la polea (D) y la velocidad de giro de la misma (n).
La rueda que inicia el movimiento es la motora o de entrada (1) y la que lo recibe la de salida o conducida(2).
D1 · n1 = D2 · n2
7. TRANSMISIÓN POR CORREA
Transmite el movimiento de giro entre dos poleas que no están en contacto a través del rozamiento que provoca una correa que las une.Se caracteriza por su tamaño, expresado por el diámetro de la polea (D) y la velocidad de giro de la misma (n).
La rueda que inicia el movimiento es la motora o de entrada (1) y la que lo recibe la de salida (2).
D1 · n1 = D2 · n2

7. TRANSMISIÓN POR CORREA
¿Qué tamaño deberá tener la rueda de salida para que circule a 5 rpm cuando la conecto a una polea de 20 cm de diámetro que circula a 8 rpm?
7. TRANSMISIÓN POR CORREA
En este ejemplo, la rueda motora es más pequeña, ¿irá más rápido o más lenta que la conducida?Calcula a qué velocidad rueda la polea motora de 4 cm de diámetro cuando se le conecta una polea de 36 cm de diámetro que circula a 10 rpm.

















![Ventilador [Motorización] - Máquinas Simples | Fischertechnik](https://static.fdocuments.ec/doc/165x107/58831df91a28abe2758b4a89/ventilador-motorizacion-maquinas-simples-fischertechnik.jpg)