M etodos num ericos y anal ticos para la determinaci...
52
M´ etodos num´ ericos y anal´ ıticos para la determinaci´ on de bifurcaciones en sistemas planos discontinuos Inmaculada del Valle And´ ujar Marzo, 2016
Transcript of M etodos num ericos y anal ticos para la determinaci...

Metodos numericos y analıticos para ladeterminacion de bifurcaciones en sistemas
planos discontinuos
Inmaculada del Valle Andujar
Marzo, 2016

2

Indice general
Prefacio 5
1. Metodos numericos de continuacion 71.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2. El metodo de continuacion . . . . . . . . . . . . . . . . . . . . 81.3. Un ejemplo de aplicacion . . . . . . . . . . . . . . . . . . . . . 10
2. Sistemas planos y planos de fase 132.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. Puntos de equilibrio . . . . . . . . . . . . . . . . . . . . . . . . 142.3. Orbitas periodicas y ciclos lımites . . . . . . . . . . . . . . . . 192.4. Secciones de Poincare . . . . . . . . . . . . . . . . . . . . . . . 202.5. Teorıa de bifurcaciones . . . . . . . . . . . . . . . . . . . . . . 21
3. El caso foco-silla 233.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2. Curvas de bifurcacion . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.1. Curva buckling . . . . . . . . . . . . . . . . . . . . . . 283.2.2. Curva critical crossing . . . . . . . . . . . . . . . . . . 313.2.3. Curva silla-nodo . . . . . . . . . . . . . . . . . . . . . 343.2.4. Curva de conexion homoclina . . . . . . . . . . . . . . 39
4. Conclusiones 49
3

4 INDICE GENERAL

Prefacio
En el presente proyecto se consideran una familia de sistemas planos dis-continuos en forma canonica. El objetivo es delimitar en un plano de parame-tros dado determinadas curvas de bifurcacion, obteniendo diversas regionescon distinto numero de ciclos lımites. En este proyecto se estudiara el casoconcreto de la configuracion con dos zonas de linealidad en el caso foco-sillay se analizara el comportamiento del sistema para determinados valores delos parametros, comentando las soluciones obtenidas. Tambien se utilizara elsoftware Dynamics Solver para simular el sistema, dibujando ası los cicloslımites.
Para el desarrollo del proyecto se ha partido de varias investigaciones pre-vias basadas en los sistemas planos discontinuos. En primer lugar, debemosreferir el artıculo Canonical Discontinuous Planar Piecewise Linear Systems(ver [4]), en el cual se obtiene una forma canonica reducida con tan solo cin-co parametros frente a los siete parametros que contiene la forma canonicade Lienard correspondiente. En segundo lugar, mencionamos el artıculo Ageneral mechanism to generate three limit cycles in planar Filippov systemswith two zones [7], en el que se muestra que la existencia de un foco en unade las regiones del sistema es suficiente para obtener tres ciclos lımites, in-dependientemente de la dinamica de la otra region; dicho trabajo tambienconstituye un punto de partida del presente proyecto, que supone una am-pliacion de dicho estudio, centrado en el caso foco-silla. Por ultimo, cabemencionar la publicacion [8], en la que, considerando el mismo sistema, seobtiene una region con tres ciclos lımites, uno de ellos procedentes de unaconexion homoclınica (homoclinic connection).
La estructura del presente trabajo es la siguiente. En el primer capıtulohacemos una revision suscinta de los metodos numericos de continuacion,puesto que su uso sera obligado a la hora de obtener las diferentes curvas debifurcacion en el plano de parametros elegido. En el capıtulo dos, explicare-mos las generalidades de los sistemas planos y los planos de fases, exponiendo
5

6 INDICE GENERAL
los conceptos mas importantes, como puntos de equilibrios, seccion de Poin-care y orbitas periodicas y ciclos lımites. En el capıtulo tres, se describira elcaso foco-silla para nuestro sistema discontinuo y se dibujaran las curvas debifurcacion en el plano de parametros escogido, explicando el significado decada una de las curvas y como se obtienen.

Capıtulo 1
Metodos numericos decontinuacion
1.1. Introduccion
En general, la busqueda de raıces de un sistema de ecuaciones no linealeses un problema numericamente difıcil y es necesario desarrollar tecnicas pararesolverlos. El metodo de continuacion constituye una de estas tecnicas paraencontrar las raıces de sistemas o ecuaciones complejas, introduciendo demanera artificial el llamado parametro de continuacion 1. Ası, los metodosde continuacion tratan de sumergir el problema que debe resolverse dentro deuna familia adecuada de problemas. Supongamos que se parte de un sistemade ecuaciones no lineales de la forma
F (x) = 0, (1.1)
cuya solucion x∗, es desconocida, y se parte de una aproximacion inicial x0para resolver el problema.
Los metodos para la resolucion de sistemas de ecuaciones no lineales tie-nen, en general, un radio de convergencia pequeno y es necesario partir deuna solucion inicial adecuada para que converjan. Conseguir esta solucioninicial es, en ocasiones, complicado y hay que tratar de ampliar el radio deconvergencia del metodo numerico de algun modo. Para conseguirlo, unaposibilidad es precisamente utilizar un metodo de continuacion.
Los metodos de continuacion consisten en plantear una familia de proble-mas no lineales dependientes de un parametro, λ ∈ [0, 1] de forma que para
1Aquı se describe de forma general la resolucion de un problema sin parametros me-diante el metodo de continuacion. En otros casos, como veremos en los siguientes capıtulos,el parametro de continuacion ya esta presente de forma natural en el problema.
7

8 CAPITULO 1. METODOS NUMERICOS DE CONTINUACION
λ = 0, se tenga un problema con solucion conocida, y para el valor λ = 1 secorresponda con el problema (1.1) cuya solucion x∗ se desconoce. Por tanto,el metodo de continacion determina una forma de proceder para ir desdela solucion conocida hasta la solucion desconocida que resuelve el problema(1.1).
Para nuestro objetivo, usaremos la misma metodologıa, pero sin necesidadde introducir artificialmente el parametro, que aparece de modo natural. Ası,en el contexto de la realizacion del analisis de bifurcacion, es muy habitualtrabajar con los denominados diagramas de bifurcacion. Estos diagramaspermiten analizar el comportamiento cualitativo de los puntos de equilibriosy de las orbitas periodicas de los sistemas cuando se modifica un determinadoparametro, que suele recibir el nombre de parametro de bifurcacion.
1.2. El metodo de continuacion
Para desarrollar esta seccion, se ha partido del trabajo realizado por AngelBlanco Hierro en su Proyecto Fin de Carrera (ver [1]).
Suponemos que queremos obtener curvas que representen las solucionesdel sistema f(X,λ) = 0, donde f : Rn × R → Rn, x ∈ Rn, λ ∈ R. Suponga-mos conocida una curva solucion parametrizada por t ∈ R, de manera quef(X(t), λ(t)) = 0. Entonces, derivando respecto de t, queda
∂f
∂X(X(t), λ(t)) ·X ′(t) +
∂f
∂λ(X(t), λ(t)) · λ′(t) = 0, (1.2)
es decir, [∂f
∂X
∂f
∂λ
]·[X ′(t)λ′(t)
]= 0.
Podemos ampliar la matriz de derivadas parciales en una fila, forzando,por ejemplo, que λ(t) = t, es decir, λ′(t) = 1, puesto que λ sera habitual-mente el parametro de bifurcacion. Obtenemos de esta forma un sistema deecuaciones lineales del que podemos obtener el vector tangente, puesto quequeda unıvocamente determinado
∂f
∂X
∂f
∂λ
0 1
· [X ′(t)λ′(t)
]=
[01
]⇒ J · T =
[01
], (1.3)
donde J es la matriz jacobiana ampliada de f y T es el vector tangente a lacurva, ambos referidos a un punto considerado.

1.2. EL METODO DE CONTINUACION 9
Figura 1.1: Correccion segun X.
Si se parte de un punto inicial (X0, λ0), y dado que la curva continuarasiguiendo la direccion tangente en dicho punto, entonces una aproximacional siguiente punto podra obtenerse a partir del punto inicial mas un pequenoincremento o paso de continuacion h en la direccion del vector tangente, deforma que
(X1, λ1) = (X0, λ0) + h · T. (1.4)
La aproximacion que se obtiene supone una prediccion para el nuevo puntode la curva. Con esta aproximacion, estaremos en condiciones de aplicar porejemplo el metodo de Newton, como el metodo de correcion, para obtener unpunto de la curva con una precision adecuada.
Una estrategia apropiada es realizar la correccion en la direccion en la queel vector tangente cambia en menor magnitud, acercandonos de esta forma ala curva. Tal como se puede observar en las figuras 1.1 y 1.2, esto se traduceen forzar la correccion, obligando que el incremento sea nulo en la variablecorrespondiente a la componente de mayor valor absoluto del vector T .
Las correcciones (4X,4λ) a realizar sobre (X1, λ1) siguiendo el metodode Newton deben satisfacer el sistema
∂f
∂X
∂f
∂λ
eTi
· [4X4λ]
=
[−f0
], (1.5)
donde el eTi es el vector unitario con 1 en la posicion i-esima correspondienteal ındice de la componente maxima del vector T . Tanto la matriz como lafuncion vectorial f serıan evaluadas en los sucesivos puntos de correcion.

10 CAPITULO 1. METODOS NUMERICOS DE CONTINUACION
Figura 1.2: Correccion segun λ.
En la ultima iteracion, una vez conseguido el error prescrito, aceptarıamos elresultado de las sucesivas correcciones como nuevo punto de la curva (X1, λ1).
Las ideas expuestas permiten plantear un metodo de resolucion para lasecuaciones que nos ocupan en el presente proyecto.
1.3. Un ejemplo de aplicacion
En esta seccion se pretende ilustrar el metodo de continuacion, aplicando-lo al folium de Descartes, curva cuya ecuacion puede escribirse de la forma
f(x, y) = x3 + y3 − 3xy = 0. (1.6)
Dicha ecuacion fue propuesta por Descartes en 1638. Esta curva repre-senta una hoja en el primer cuadrante. La representacion grafica del foliumse muestra en la figura 1.3, en coordenadas cartesianas.
Derivando (1.6) respecto de t, queda:
fx · x′(t) + fy · y′(t) = 0.

1.3. UN EJEMPLO DE APLICACION 11
Figura 1.3: Folium de Descartes
A continuacion, ampliamos el vector de derivadas parciales en una fila,imponiendo que x′(t) = 1. Con lo que se obtiene:[
fx fy1 0
]·[x′(t)y′(t)
]=
[01
],
donde [fx fy1 0
],
es la matriz jacobiana ampliada de f(x, y), en la que el 1 corresponde a lacomponente mas grande del vector tangente. Y por otro lado,[
x′(t)y′(t)
],
es el vector tangente a la curva.Sustituyendo las expresiones de las derivadas parciales se tiene[
3x2x′(t)− 3y 3y2y′(t)− 3x1 0
]·[x′(t)y′(t)
]=
[01
].

12 CAPITULO 1. METODOS NUMERICOS DE CONTINUACION
Partimos de un punto inicial arbitrario (x = −4, y = 3,02549) que cumplela expresion (1.6).
A continuacion se predice el nuevo punto de la curva:
(xn+1, yn+1) = (xn, yn) + h · (x′(t), y′(t))
donde h es nuestro paso de continuacion.Se realiza la correccion por el metodo de Newton en una de las variables.
En este caso, se aplicara a la variable y, de forma que:
yn+1 = yn+1 −f(x, yn+1
f ′(x, yn+1
⇒ fy · 4y = −f(x, yn+1)
Es decir, [fx fy1 0
]·[4x4y
]=
[−f(x, yn+1)
0
]Se itera la expresion varias veces hasta que se consigue un error aceptable.
Para realizar los calculos de prediccion, las sucesivas correcciones y, en defi-nitiva, dibujar el folium de Descartes, hemos utilizado el software WolframMathematica. La figura 1.4 muestra el resultado obtenido.
Figura 1.4: Folium de Descartes dibujado utilizando el metodo de continua-cion.

Capıtulo 2
Sistemas planos y planos defase
2.1. Introduccion
A lo largo de la historia, los modelos fısicos y por extension los mode-los en ingenierıa han sido formulados mediante ecuaciones diferenciales conbuenas propiedades de continuidad, suavidad, etc. El panorama ha cambiadorecientemente por la necesidad de considerar sistemas donde se asumen cam-bios bruscos en los modelos, generalmente por la accion de mecanismos decontrol. Los sistemas planos discontinuos constituyen una clase de sistemasde ecuaciones diferenciales que se utilizan para modelar estos procesos fısicosy de la ingenierıa, y se aplican, por ejemplo, en disciplinas como la mecanica,la electronica o la economıa.
Los sistemas planos discontinuos son sistemas donde el espacio de fase sedivide en varias regiones, en las que la dinamica del sistema es lineal, siendola dinamica global no lineal. Uno de los mayores problemas de los sistemasdinamicos es analizar el comportamiento transitorio y la estabilidad del siste-ma definidos por un conjunto de ecuaciones diferenciales. Para ello, se utilizala teorıa de bifurcaciones ya que puede pronosticar cualitativamente com-portamientos dinamicos complejos en el sistema, debido a la variacion de susparametros. Es decir, que cuando se modifica uno de los parametros del sis-tema, estos cambios se manifiestan en la estabilidad del sistema, apareciendoo desapareciendo soluciones estables, tambien llamadas puntos de equilibrio,por ejemplo.
Frecuentemente, los modelos contienen varios parametros y es crucial de-terminar la respuesta del sistema bajo el estudio de los diferente valores delos parametros, consiguiendo ası una vision global de todos los posibles com-
13

14 CAPITULO 2. SISTEMAS PLANOS Y PLANOS DE FASE
portamientos dinamicos. Uno de los posible comportamientos finales es laaparicion de orbitas periodicas, que en el caso de ser aisladas, son llamadasciclos lımites, cuyo numero y estabilidad adquiere gran importancia en estecampo. Actualmente, el caso especıfico de sistemas planos discontinuos condos regiones recibe especial atencion, porque aun no ha sido posible deter-minar el numero de ciclos lımites, que sigue siendo un problema no trivial.
2.2. Puntos de equilibrio
La forma tıpica de un sistema dinamico lineal es
dx
dt= a1x+ b1y + c1
dy
dt= a2x+ b2y + c2,
con x ∈ Rn; y ∈ Rn, que se puede escribir en la forma matricial[xy
]=
[a1 b1a2 b2
]·[xy
]+
[c1c2
], (2.1)
o mas abreviadamente,x = AX + C.
donde A es la matriz jacobiana del sistema.
Cuando el sistema es discontinuo, que es el caso que nos ocupa, se tendrauna expresion distinta en cada zona, lo que da lugar a la division por regionesdel espacio de fase.
Si se considera el sistema autonomo
x = F (x, y)
y = G(x, y), (2.2)
donde las funciones F y G, ası como sus primeras derivadas parciales, soncontinuas en el plano de fases. Cada solucion del sistema (2.2) esta formuladapor un par de funciones x(t) e y(t) que definen una curva C ≡ [x(t), y(t)] enel plano XY o plano de fases. Si existe una solucion en la que x(t) = x0 ey(t) = y0 para todo t ∈ R, lo que implicarıa que F (x0, y0) = G(x0, y0) = 0,entonces la solucion define unicamente un punto (x0, y0) en el plano de fases.Se dice entonces que (x0, y0) es un punto crıtico o un equilibrio del sistema.

2.2. PUNTOS DE EQUILIBRIO 15
Los puntos crıticos se corresponden con las soluciones de equilibrio delsistema de ecuaciones diferenciales. La condicion del punto crıtico de atraero repeler proporciona informacion sobre la dinamica del sistema.
De forma intuitiva un punto crritico es estable si para cualquier trayec-toria suficientemente proxima al punto en el momento inicial, por ejemplo,a una distancia menor que δ, permanece proxima al punto para todo tiempot0 > 0, es decir, la trayectoria permanece siempre dentro de un entorno decentro el punto y radio ε. Mientras que para que sea asintoticamente estable,ademas de ser estable, las trayectorias deben aproximarse al punto cuando eltiempo tiende a infinito, es decir, el punto es un atractor. El punto sera unrepulsor si es inestable y las trayectorias se alejan de el. Para mas detalles,ver [11].
Considerando x∗ = (x∗, y∗) un punto crıtico del sistema (2.2), se tieneque:
x∗ es un punto de equilibrio estable si para cada ε > 0 existe un δ > 0tal que si y es una solucion tal que ‖ y(t0) − x∗ ‖< δ, entonces ‖y(t)− x∗ ‖< ε, para todo t > t0.
x∗ es un punto de equilibrio asintoticamente estable o si x∗ es estable,y existe un δ > 0 tal que para cada solucion y con ‖ y(t0) − x∗ ‖< δ,entonces lımt→∞ y(t) = x∗.
x∗ es un punto de equilibrio inestable o si no es estable.
En el caso de los sistemas autonomos lineales, la naturaleza y estabilidaddel punto crıtico queda caracterizada por los autovalores de la matriz delsistema (ver [?]). Considerando el sistema autonomo lineal (2.1), segun losautovalores λ1, λ2 de la matriz A del sistema, el punto crıtico puede ser unnodo, un punto de silla, un centro o un foco.
1. Decimos que el punto crıtico es un nodo cuando los autovalores λ1, λ2son reales y del mismo signo. Las trayectorias del diagrama de fases seacercaran al punto crıtico en el caso de ser los autovalores negativos ypor tanto, el punto sera asintoticamente estable. El diagrama de fases deeste caso puede observarse en la figura 2.1. Las trayectorias se alejarandel punto crıtico en el caso de ser los autovalores positivos, y por tanto,sera un punto crıtico inestable.

16 CAPITULO 2. SISTEMAS PLANOS Y PLANOS DE FASE
Figura 2.1: Nodo estable.
Cuando el sistema tiene los autovalores reales e iguales (λ es el unicoautovalor de la matriz A), el punto crıtico se suele denominar nodoimpropio y las configuraciones de las trayectorias son algo diferentes,aunque guardan cierta relacion con las anteriores (veanse las figuras 2.2y 2.3).
Figura 2.2: Nodo impropio condim(V (λ)) = 2.
Figura 2.3: Nodo mpropio condim(V (λ)) = 1.
2. Decimos que el punto crıtico es un punto de silla cuando los autovaloresλ1, λ2 son reales y de distinto signo. Cuando t→∞, nos encontramoscon dos trayectorias rectas que se acercan al punto crıtico y otras dostrayectorias rectas que se separan del punto crıtico. Por tanto, todo

2.2. PUNTOS DE EQUILIBRIO 17
Figura 2.4: Punto de silla.
punto de silla es inestable. Las trayectorias se pueden observar en lafigura 2.4.
3. El punto crıtico es un centro cuando los autovalores son imaginariospuros. Las trayectorias son curvas cerradas que rodean al punto crıtico,que en general tienen forma de elipses, de modo que ninguna trayectoriatiende a el cuando t → +∞ o t → −∞. Por ello, el punto crıtico esestable, pero no asintoticamente estable. Se puede observar en la figura2.5.
4. El punto crıtio es una espiral o foco cuando los autovalores son com-plejos conjugados y tienen parte real distinta de cero. Las trayectoriasson curvas en forma de espiral que, cuando t → ∞, pueden presentardos situaciones.
Todas las trayectorias se acercan al punto crıtico. Este caso se dacuando la parte real de los autovalores es negativa. Ası pues, elfoco serıa asintoticamente estable.
Todas las trayectorias se separan del punto crıtico. Este caso se dacuando la parte real de los autovalores es positiva. Por lo tanto,el foco sera inestable.

18 CAPITULO 2. SISTEMAS PLANOS Y PLANOS DE FASE
Figura 2.5: Centro.
Figura 2.6: Foco
Como se ha comentado, la naturaleza del punto crıtico puede describirseatendiendo a los autovalores de la matriz A. Sin embargo, estas caracterısticastambien se pueden describir en terminos de la traza T = traza(A) y deldeterminante D = det(A) de la matriz A de coeficientes del sistema, teniendoen cuenta que el polinomio caracterıstico de A viene dado por
pA(λ) = λ2 − Tλ+D.
2.3. ORBITAS PERIODICAS Y CICLOS LIMITES 19
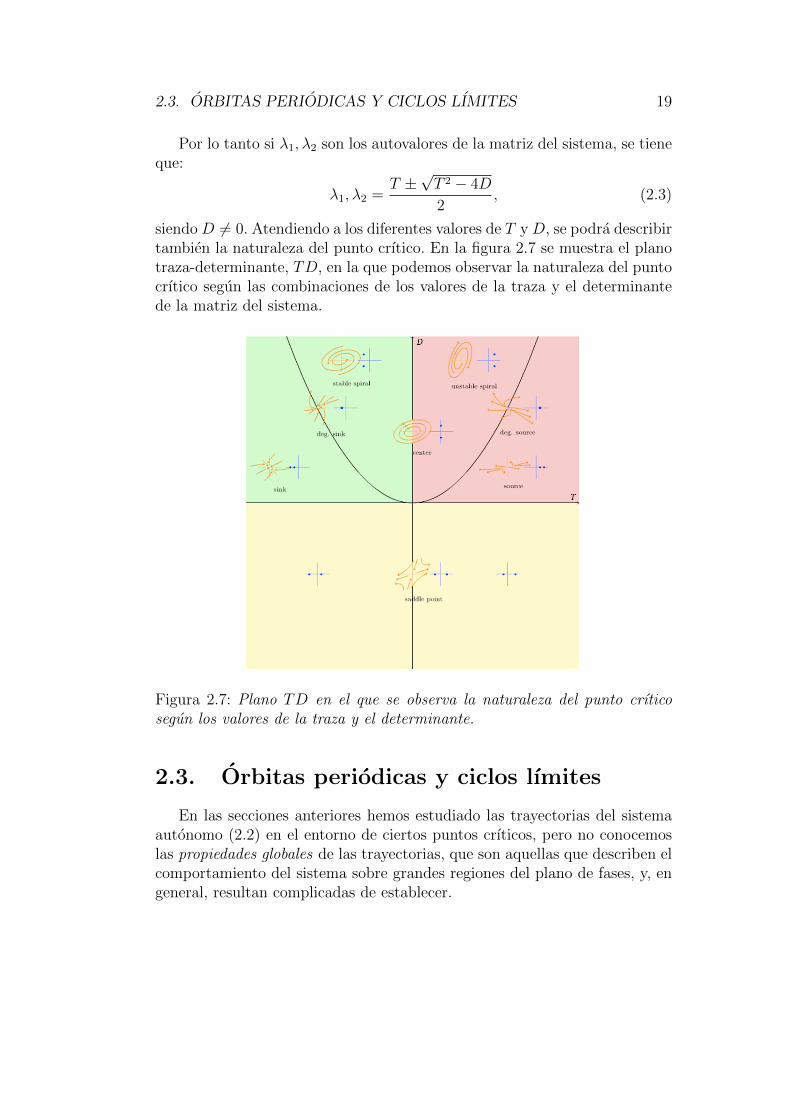
Por lo tanto si λ1, λ2 son los autovalores de la matriz del sistema, se tieneque:
λ1, λ2 =T ±√T 2 − 4D
2, (2.3)
siendo D 6= 0. Atendiendo a los diferentes valores de T y D, se podra describirtambien la naturaleza del punto crıtico. En la figura 2.7 se muestra el planotraza-determinante, TD, en la que podemos observar la naturaleza del puntocrıtico segun las combinaciones de los valores de la traza y el determinantede la matriz del sistema.
Figura 2.7: Plano TD en el que se observa la naturaleza del punto crıticosegun los valores de la traza y el determinante.
2.3. Orbitas periodicas y ciclos lımites
En las secciones anteriores hemos estudiado las trayectorias del sistemaautonomo (2.2) en el entorno de ciertos puntos crıticos, pero no conocemoslas propiedades globales de las trayectorias, que son aquellas que describen elcomportamiento del sistema sobre grandes regiones del plano de fases, y, engeneral, resultan complicadas de establecer.

20 CAPITULO 2. SISTEMAS PLANOS Y PLANOS DE FASE
El problema central consiste en determinar si (2.2) tiene o no trayectoriascerradas, cuestion que guarda estrecha relacion con la existencia o no desoluciones periodicas. Una solucion x(t), y(t) de (2.2) se llama periodica sininguna de esas dos funciones es constante, estan ambas definidas para todot y existe un numero T > 0 tal que x(t + T ) = x(t) e y(t + T ) = y(t) paratodo t. El T mas pequeno con esa propiedad se conoce como perıodo de lasolucion. Cada solucion periodica de (2.2) define una trayectoria cerrada quese recorre una vez por completo cuando t crece desde t0 hasta t0 + T , seacual sea t0. Recıprocamente, si C = [x(t), y(t)] es una trayectoria cerradade (2.2), entonces x(t), y(t) definen una solucion periodica. Por tanto, labusqueda de soluciones periodicas de (2.2) se reduce a la de trayectoriascerrada. Necesitamos criterios para determinar si ciertas regiones del planode fases contienen o no trayectorias cerradas. Para ello, es de gran utilidad elteorema de Poincare-Bendixson, que dice, considerando el sistema (2.2), quesi una trayectoria permanece acotada cuando t tiende a infinito, entonces latrayectoria es un punto crıtico o un ciclo lımite, o se aproxima a un puntocrıtico o a un ciclo lımite. Finalmente, se define el concepto de ciclo lımitecomo una orbita periodica asilada, es decir, una curva cerrada C que escıclica y atrae a las orbitas de cualquier solucion que en el instante inicialeste proxima a C.
2.4. Secciones de Poincare
Se considera un ciclo lımite solucion x(t) = p(t) de (2.2) de periodo T > 0,es decir, p(t+T ) = p(t). Para estudiar la dinamica cerca de dicho ciclo lımite,construimos una seccion de Poincare, que es una superficie Π de dimensionn − 1 respecto del sistema, y que contiene un punto xp = p(t∗) en el ciclolımite que es transversal al flujo en xp.
Consideremos una solucion Φ(x, t) en el espacio de fase n-dimensionaly una hipersuperficie Π = {x ∈ Rn : π(x) = 0, de tal forma que cortetransversalmente a la trayectoria correspondiente a Φ(x, t), como se muestraen la figura 2.8. La condicion de transversalidad es que el vector normalπx(xp) de Π en xp tiene una componente distinta de cero en la direccion deΦt(xp, 0) = f(xp). (Aquı el subındice x o t significa diferencicacion respectode esa variable). Es decir, se requiere
πx(xp)f(xp) 6= 0,
donde el subındice x o t significa diferenciacion parcial respecto de esa varia-ble, es decir, que πx(xp) es el vectori normal de Π en x = xp.

2.5. TEORIA DE BIFURCACIONES 21
Figura 2.8: Seccion de Poincare.
A continuacion podemos usar Φ para definir una seccion P desde Π aΠ, llamada seccion de Poincare, la cual esta definida para x suficientementecerca de xp a traves
P (x) = Φ(x, τ(x)),
donde τ(x) se define implıcitamente como el tiempo mas cercano a T para elcual π(Φ(x, τ(x))) = 0.
Uno de los beneficios de estudiar las secciones de Poincare es que permitenreducir los sistemas de ecuaciones diferenciales de dimension n a un sistemade ecuaciones diferenciales de dimension n− 1.
2.5. Teorıa de bifurcaciones
La teorıa de bifurcaciones estudia el comportamiento de las soluciones deuna familia de ecuaciones diferenciales. En referencia a los sistemas dinami-cos, una bifurcacion se da cuando una pequena variacion en los valores de losparametros del sistema (parametros de bifurcacion) causa un cambio cua-litativo o topologico en el comportamiento de dicho sistema. La teorıa debifurcaciones fue propuesta por Henri Poincare en 1885, en un trabajo sobreorbitas planetarias donde estudio la influencia de un parametro de una ecua-cion diferencial sobre la naturaleza de las soluciones. De esta forma, parapequenas variaciones del parametro, la solucion solo cambiaba cuantitati-vamente; sin embargo, si llegaba a cierto valor crıtico o de bifurcacion, lasolucion experimentaba un cambio cualitativo.

22 CAPITULO 2. SISTEMAS PLANOS Y PLANOS DE FASE
Las bifurcaciones asociadas a equilibrios, en sistemas dependientes de unsolo parametro se produce principalmente mediante dos mecanismos:
1. Cuando un valor propio real negativo evoluciona con el cambio de losvalores del parametro hacia el semiplano real positivo. El punto deequilibrio deja de ser estable porque pasa de ser un nodo (estable) a seruna silla (inestable). Este fenomeno se denomina bifurcacion silla-nodoen sistemas no lineales, y entonces da lugar a la colision de una silla yun nodo para desaparecer .al otro lado de la bifurcacion”.
2. Cuando un par de valores propios complejos conjugados atraviesan eleje imaginario pasando el punto de equilibrio estable a ser inestable,pudiendo tener lugar la aparicion de un ciclo lımite. Es decir, cuandolos autovalores complejos conjugados pasan de tener parte real negati-va a tener parte real positiva. En este caso, el fenomeno se denominabifurcacion de Hopf y puede ocurrir de dos formas distintas. Si el ciclolımite es inestable y aparece antes del valor de bifurcacion, delimitandola region de atraccion del punto de equilibrio, la bifurcacion se denomi-na subcrıtica. En el caso contrario, si el ciclo lımite es estable y aparecea partir del valor de bifurcacion, la bifurcacion se denomina supercrıtica.
El concepto de bifurcacion es importante en sistemas no lineales, queen nuestro caso estan definidos mediante la agrupacion discontinuas de dossistemas lineales. En este proyecto detectamos ciertas bifurcaciones de codi-mension dos, las cuales organizan otras curvas de bifurcaciones de codimen-sion uno que aparecen al variar los parametros del sistema; estudiamos estosfenomenos en un determinado plano de parametros.

Capıtulo 3
El caso foco-silla en sistemasplanos discontinuos
3.1. Introduccion
Para el sistema plano discontinuo que nos ocupa asumimos que las dosregiones lineales en el plano de fases son los semiplanos izquierdo y derecho,
S− = (x, y) : x < 0, S+ = (x, y) : x > 0
de forma que x = 0 es la lınea de separacion entre las dos regiones y elsistema que va a ser estudiado es
x = X(x) =
{X−(x), si x ∈ S−,X+(x), si x ∈ S+,
(3.1)
dondeX± = A±x+ b±, (3.2)
que se puede escribir en la forma matricial
X−(x) =
[a−11 a−12a−21 a−22
]·[xy
]+
[b−1b−2
]
X+(x) =
[a+11 a+12a+21 a+22
]·[xy
]+
[b+1b+2
].
El sistema plano discontinuo tiene en principio doce parametros y su anali-sis parece ser una tarea practicamente imposible (ver [4] y [7]). A travesde algunos cambios de variables, obtenemos una forma canonica con menosparametros, topologicamente equivalente a el sistema (3.1).
23

24 CAPITULO 3. EL CASO FOCO-SILLA
Asumiendo que a+12a−12 > 0 en el sistema (3.1), entonces el homeomorfismo
x = h(x) viene dado por
[xy
]= a+12
[1 0a−22 −a−12
]·[xy
]+
[0−b−1
]para S−
[xy
]= a−12
[1 0a+22 −a+12
]·[xy
]+
[0−b−1
]para S+
Denotando como T− y T+ las trazas y como D− y D+ los determinantesde las matrices A+ y A−, y transformando el sistema (3.1) a la forma canonicade Lienard, se tiene
x =
[T− −1D− 0
]x−
[0a−
], si x ∈ S−,
x =
[T+ −1D+ 0
]x−
[−ba+
], si x ∈ S+,
donde a− = a+12(a−12b−2 − a−22b
−1 ), b = a−12b
+1 − a+12b
−1 , a+ = a−12(a
+12b
+2 −
a+22b+1 ).
Considerando el signo del discriminante4± = (T±)2−4D± de la ecuacioncaracterıstica de las matrices A− y A+ en (3.2), introducimos un parametromR,L ∈ [i, 0, 1] definido para cada semiplano por
m =
i, si T 2 − 4D < 0,0, si T 2 − 4D = 0,1, si T 2 − 4D > 0
(3.3)
Observando el significado del parametro definido anteriormente con res-pecto a la dinamica de cada zona, se tiene que para m = i, tenemos un foco;para m = 0 tenemos un nodo impropio; y cuando m = 1 tenemos un nodo si| γ |≥ 1 y una silla si | γ |< 1.
Normalizando el tiempo de diferente forma para cada zona, se reescribeel sistema

3.1. INTRODUCCION 25
x =
[2γL −1
γ2L −m2L 0
]x−
[0aL
], si x ∈ S−,
(3.4)
x =
[2γR −1
γ2R −m2R 0
]x−
[−baR
], si x ∈ S+,
donde los parametros mR,L ∈ [i, 0, 1] estan definidos en (3.3) y
aR,L =a±
ωR,L, γR,L =
T±2ωR,L
(3.5)
siendo ωR,L = 1 para mR,L = 0, y ωR,L =
√∣∣∣∣(T±)2
4−D±
∣∣∣∣, si mR,L 6= 0.
El sistema se puede expresar, por lo tanto, de la siguiente forma{x = 2γLx− yy = (γ2L −m2
L)x− aLpara x < 0{
x = 2γRx− y + by = (γ2R −m2
R)x− aRpara x > 0
Para el caso concreto que nos ocupa en el presente proyecto, en la regionde la izquierda tendremos un foco, y en la region de la derecha tendremosuna silla. Ası podemos asumir que mL = i para tener un foco en el semiplanoizquierdo; y mR = 1 y −1 < γR < 0 para tener un punto de silla en elsemiplano derecho.
De esta forma, nuestro sistema quedara definido como{x = 2γLx− yy = (γ2L + 1)x− aL
para x < 0
(3.6){x = 2γRx− y + by = (γ2R − 1)x− aR
para x > 0,
y tomaremos como plano de parametros el plano (xL, b). Los valores delresto de parametros los definiremos mas adelante para las distintas curvas debifurcacion.
A continuacion vamos a obtener las expresiones xL y xR a partir de laposicion de equilibrio del sistema (3.4). Por tanto, se tiene para x < 0
y = 0, xe = xL =aL
γ2L −m2L
; x = 0, ye = 2γLxL.

26 CAPITULO 3. EL CASO FOCO-SILLA
Para x > 0,
y = 0, xe = xR =aR
γRL −m2R
; x = 0, ye = 2γRxR + b.
Las funciones x(t) e y(t solucion del sistema (3.6) se pueden obtener apartir de la formula de variacion de constantes, que viene determinada por
X(t) = eAtX(0) + eAt∫ t
0
e−AsB · ds.
Tras el cambio de variable x = x− xL y y = y − yL para llevar el equilibrioal origen, el sistema queda homogeneo, eliminandose la integral y por tanto[
x(t)− xLy(t)− yL
]= eAt
[x(0)− xLy(0)− yL
],
donde eAt denota la matriz exponencial del sistema, que viene determinadapor
eAt = eγt ·[cos t+ γ sin t − sin t(γ2 + 1) sin t cos t− γ sen t
].
Si x(0) = x(t) = 0 y sustituyendo la matriz exponencial se tiene que[−xL
y(t)− yL
]= eγt ·
[cos t+ γ sin t − sin t(γ2 + 1) sin t cos t− γ sin t
]·[−xL
y(0)− yL
].
Notese que se ha descrito la solucion del sistema para el caso de x < 0. Parax > 0 se sigue el mismo procedimiento. Sabiendo que y(t) = PL(y) e y(0) = y,reordenando y despejando se obtienen las expresiones de la aplicacion dePoincare y de la coordenada de la orbita que se describen mas adelante enlas ecuaciones (3.8) y (3.7).
A continuacion describiremos la aplicacion de Poincare (ver [7]) del sis-tema (3.4) para el caso de tener una dinamica regulada por un foco en elsemiplano izquierdo. Notese que se trata de una expresion en coordenadasparametricas, en funcion del tiempo de vuelo t, y que nuestra representacionexige xL 6= 0 pues, de lo contrario, todas las orbitas tendrıan tiempo de vueloigual a π y no serıa posible discriminarlas por dicho tiempo de vuelo. Para lacoordenada yL de comienzo de la orbita en el semiplano izquierdo se obtiene
y = aL1− eγLt(cos t− γL sin t)
(γ2L + 1)eγLt sin t,
o equivalentemente
y = xL1− eγLt(cos t− γL sin t)
eγLt sin t. (3.7)

3.2. CURVAS DE BIFURCACION 27
Analogamente la coordenada PL(y) de la orbita al volver al eje y, viene dadapor
PL(y) = −aL1− e−γLt(cos t+ γL sin t)
(γ2L + 1)e−γLt sin t,
o equivalentemente
PL(y) = −xL1− e−γLt(cos t+ γL sin t)
e−γLt sin t. (3.8)
Las expresiones parametricas de la aplicacion de Poincare para el caso detener una dinamica regulada por una silla en el semiplano derecho son
yR = b+ aRe−γRt − cosh t+ γR sinh t
(γ2R − 1) sinh t,
o de forma equivalente
yR = b+ xRe−γRt − cosh t+ γR sinh t
sinh t. (3.9)
La coordenada PR(y) de la orbita al volver al eje y en el semiplano derecho,viene dada por
PR(yR) = b− aRγ2R − 1
eγRt − cosh t+ γR sinh t
sinh t,
o de forma analoga
PR(yR) = b− xReγRt − cosh t+ γR sinh t
sinh t. (3.10)
3.2. Curvas de bifurcacion
En esta seccion se dibujaran distintas curvas de bifurcacion en el plano deparametros (xL, b) y para tres valores distintos del parametro γL del sistema(3.6). En concreto se van a dibujar cuatro curvas de bifurcacion distintas: lacurva buckling, la curva critical crossing, la curva silla nodo y la curva deconexion homoclina. En cada caso, se describira como se obtienen las curvasy su significado, dibujando tambien las soluciones del sistema en el plano xy.
El sistema (3.6) tiene cinco parametros γL, γR, xL, xR y b. Como se hacomentado anteriormente, nuestro plano de parametros sera el plano (xL, b),por tanto, para la obtencion de las curvas de bifurcacion tendremos que fijar

28 CAPITULO 3. EL CASO FOCO-SILLA
el resto de parametros. Los valores que se han utilizado para obtener lascurvas son:
γR = 0,1;xR = 1, pues se considera el caso silla real ;y γL tomara tres valores distintos que se especificaran en cada caso.
3.2.1. Curva buckling
Para obtener esta curva de bifurcacion tendremos que imponer las si-guientes condiciones
y = 0, PL(y) = b, (3.11)
donde y esta definida en la ecuacion (3.7) y PL(y), en la ecuacion (3.8).Estas condiciones implican en el plano xy la configuracion que se muestra enla figura 3.1.
Figura 3.1: Orbita tipo buckling en el plano xy.
Se considera en este caso el foco real, xL < 0, por lo que la orbita saletangente al eje y rodeando al foco, es decir, se produce lo que se conoce comotangencia visible.
En la figura 3.1 se puede observar una zona de deslizamiento atractiva oattractive sliding set que es justo el tramo (0, b) en el eje de ordenadas, en

3.2. CURVAS DE BIFURCACION 29
Figura 3.2: Curvas de bifurcacion buckling para dos valores distintos de γL.
el que las orbitas llegan empujadas por la dinamica del punto de silla quedomina el semiplano derecho y deslizan sobre el tramo (0, b).
Para obtener la curva de bifurcacion en el plano de parametros aplica-mos el metodo de continuacion al sistema (3.11). Para aplicar el metodo decontinuacion necesitamos un punto inicial lo suficientemente bueno, como seexplico en el Capıtulo 1 del presente proyecto. Dicho punto se ha obtenidotomando el valor xL = −1 y resolviendo las ecuaciones (3.11). Se obtienen,ası, las curvas de bifurcacion buckling que se muestran en la figura 3.2.
Todos las parejas de valores de xL y b que estan sobre las curvas de lafigura 3.2 cumplen las condiciones buckling descritas en las ecuaciones (3.11)y tienen la configuracion en el plano xy que se observa en la figura 3.1.
Al atravesar la curva buckling en el plano de parametros, es decir, al moverel foco hacia la izquierda, las orbitas se abren cada vez mas, disminuyendoel punto de retorno PL(y), como se muestra en la figura 3.3.
Para observar los ciclos lımites obtenidos como solucion, se ha utilizadoun software que resuelve sistemas de ecuaciones diferenciales discontinuos,llamado Dynamics Solver. Simplemente introduciendo las ecuaciones del sis-tema y dando valores a los parametros se pueden observar los resultados.Hemos simulado en este caso un punto de nuestro plano de parametros quepertenezca a la curva de bifurcacion buckling y el resultado obtenido se mues-tra en la figura 3.4.

30 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.3: Comparacion de las orbitas que parten tangentes al origen parados valores distintos de xL.
Figura 3.4: Solucion del sistema simulada en Dynamics Solver para un puntoperteneciente a la curva buckling.
Se puede observar que la solucion obtenida presenta el mismo resultadoque el que se muestra en la figura 3.1. Obtenemos como solucion un ciclolımite sliding totalmente contenido en el semiplano izquierdo.

3.2. CURVAS DE BIFURCACION 31
3.2.2. Curva critical crossing
La curva de bifurcacion critical crossing se obtiene imponiendo las si-guientes condiciones
y = 0, PL(y) = yR, PR(yR) = 0, (3.12)
donde y, PL(y), yR, y PR(y) estan definidas en las ecuaciones (3.7), (3.8),(3.9) y (3.10), respectivamente. Estas condiciones implican la solucion en elplano xy que se muestra en la figura 3.5.
Figura 3.5: Orbita tipo critical crossing en el plano xy para un valor de xL.
A partir de la condicion y = 0 se obtiene el valor del tiempo de vuelot = τ , que es el tiempo de vuelo maximo que puede alcanzar la orbita.Cuanto mayor sea la orbita, menor sera el tiempo de vuelo.
Para obtener la curva de bifurcacion en nuestro plano de parametros apli-camos de nuevo el metodo de continuacion al sistema (3.12). El punto iniciallo calculamos tomando el valor xL = −0,25 y resolviendo el sistema (3.12).Ası se obtienen las curvas de bifurcacion critical crossing que se muestran enlas figuras 3.6 y 3.7 para los valores de los parametros dados.
Podemos superponer las figuras 3.2 y 3.6 para los mismos valores de losparametros obteniendo las figuras 3.8 y 3.9.

32 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.6: Curva de bifurcacion critical crossing para γL = 0,05.
Figura 3.7: Curva de bifurcacion critical crossing para γL = 0,15.
Figura 3.8: Curvas de bifurcacion critical crossing y buckling para γL = 0,15.

3.2. CURVAS DE BIFURCACION 33
Figura 3.9: Curvas de bifurcacion critical crossing y buckling para γL = 0,05.
Para esta curva de bifurcacion tambien se ha simulado el sistema en Dy-namic Solver. En este caso, queremos observar el comportamiento del sistemacon un punto perteneciente a la curva de bifurcacion critical crossing y conotro que se encuentre situado entre la curva buckling y la bcc. Los resultadosobtenidos se muestran el las figuras 3.10 y 3.11.
Figura 3.10: Orbita obtenida a partir de la simulacion del sistema en Dyna-mics Solver tomando como valores de los parametros xL y b un punto entrelas curvas buckling y bcc.
Con los valores de los parametros del punto que se encuentra entre lasdos curvas de bifurcacion se obtiene un ciclo lımite sliding que se encuentra

34 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.11: Orbita tipo critical crossing obtenida a partir de la simulaciondel sistema en Dynamics Solver tomando como valores de los parametros xLy b un punto perteneciente a la curva bcc.
en los dos semiplanos (figura 3.10). El resultado obtenido con el punto quepertenece a la curva critical crossing es el mismo que el que se ilustra en lafigura 3.5. Se obtiene un ciclo lımite que parte tangencialmente (tangenciavisible) del origen para volver de nuevo a el.
3.2.3. Curva silla-nodo
La curva de bifurcacion silla-nodo se obtiene imponiendo las siguientescondiciones
y = PR(y), PL(y) = yR, P ′L(y) = 1, (3.13)
donde y, PL(y), yR estan definidas en las ecuaciones (3.7), (3.8), (3.9), res-pectivamente; y P ′L(y) denota la primera derivada de la aplicacion de retornodel semiplano izquierdo, PL(y).
En la figura 3.12 se muestra la condicion de la bifurcacion silla nodo, enla que se representa la aplicacion de Poincare frente a la coordenada y. Seobserva que la bifurcacion se obtiene porque dos ciclos lımites, uno estable(que cumple que P ′(y) < 1) y otro inestable (que cumple P ′(y) > 1) se unenen un unico ciclo lımite estable en el que P ′(y) = 1, para luego desaparecer.

3.2. CURVAS DE BIFURCACION 35
Figura 3.12: Representacion de la aplicacion de Poincare frente a la coordena-da y en la que se refleja la obtencion de la bifucracion silla nodo, imponiendoque P ′(y) = 1.
Para obtener la curva de bifurcacion en nuestro plano de parametros(xL, b), aplicamos el metodo de continuacion al sistema (3.12). La obtenciondel punto inicial para aplicar dicho metodo es, en este caso, algo mas complejaque en los casos anteriores. Hemos partido de un punto cualquiera de la curvacritical crossing y hemos buscado un punto de la curva silla-nodo moviendoxL pero manteniendo el parametro b constante. Obtenemos ası las curvasque se muestran en las figuras 3.13 y 3.14.
Figura 3.13: Curvas de bifurcacion silla-nodo para dos valores distintos delparametro γL.

36 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.14: Curvas de bifurcacion silla-nodo superpuestas para los dos valo-res del parametro γL.
En las figuras anteriores se puede observar que ambas curvas terminanen un punto en el que b = 0 y xL > 0, que es un punto de bifurcacion decodimension dos. Todos los puntos del semieje xL > 0 con b = 0, son deltipo pseudo-foco: el conjunto de sliding se ha reducido a un solo punto ypor tanto la tangencia invisible por la izquierda en el origen coincide conla tangencia invisible por la derecha. Vamos a estudiar cuando cambia laestabilidad de dicho pseudo-foco para determinar la bifurcacion. Sabemospor [7] que P ′L(0) = −1, P ′R(0) = −1, con lo que P ′(0) = P ′L(0) · P ′R(0) = 1,luego la estabilidad del pseudo-foco la decide la derivada segunda. El valorde xL, al que llamaremos xcL, lo obtenemos calculando cuando cambia designo la derivada segunda de la composicion de las aplicaciones de retornoP = PR ◦ PL, para b = 0. Ası, se tiene
P ′′ = (PR ◦ PL)′′ =d
dy
[d
dy(PR ◦ PL)
]=
=d
dy[P ′R(PL(y)) · P ′L(y)] = P ′′R(PL(y)) · P ′L(y)2 + P ′′L(y) · P ′R(PL(y)).
Recordemos de [7] que
P ′′L(0) = − 8γL3xL(γ2L + 1)
, P ′′R(0) = − 8γR3xR(γ2R − 1)
,

3.2. CURVAS DE BIFURCACION 37
luego se obtiene que
P ′′(0) = P ′′R(0) · P ′L(0)2 + P ′R(0) · P ′′L(0) =
= − −8γR3xR(γ2R − 1)
· (−1)2 + (−1) ·(− 8γL
3xL(γ2L + 1)
)=
=8
3
(γL
xL(γ2L + 1)− γRxR(γ2R − 1)
).
Para ver cuando cambia de signo, estudiamos cuando se anula el valor ante-rior, o equivalentemente cuando
γLxL(γ2L + 1)
=γR
xR(γ2R − 1).
Despejando xcL de la expresion anterior se tiene
xcL = xRγL(γ2R − 1)
γR(γ2L + 1). (3.14)
Sustituyendo los valores de los parametros se obtienen los valores de xcL =0,493 para el valor de γL = 0,05 y xcL = 1,452 para γL = 0,15. Como se puedeobservar en la figura 3.15, graficamente obtenemos los mismos resultados dexcL que de forma analıtica.
Figura 3.15: Curvas silla nodo indicando los puntos de bifurcacion de co-dimension dos, es decir, el valor de xcL para los dos valores distintos delparametro γL.

38 CAPITULO 3. EL CASO FOCO-SILLA
Podemos superponer las figuras de las tres curvas de bifurcacion para losdistintos valores de los parametros, obteniendo las figuras 3.16 y 3.17.
Figura 3.16: Curvas de bifurcacion buckling, critical crossing y silla-nodo parael valor del parametro γL = 0,15.
Figura 3.17: Curvas de bifurcacion buckling, critical crossing y silla-nodo parael valor del parametro γL = 0,05.
Si simulamos de nuevo en Dynamics Solver el sistema con un punto perte-neciente a la curva de bifurcacion silla nodo obtenemos un unico ciclo lımiteque se muestra en la figura 3.18.

3.2. CURVAS DE BIFURCACION 39
Figura 3.18: Ciclo lımite obtenido a partir de la simulacion del sistema enDynamics Solver tomando como valores de los parametros xL y b un puntoperteneciente a la curva silla nodo.
3.2.4. Curva de conexion homoclina
La curva de bifurcacion de conexion homoclina corresponde con la con-figuracion en el plano xy que se muestra en la figura 3.19. Para representaresta curva en nuestro plano de parametros (xL, b) tenemos que imponer lascondiciones
yL = y+, PL(y) = y−, (3.15)
donde yL y PL(y) vienen dadas en las ecuaciones (3.7) y (3.8), respectiva-mente; y y+, y− se obtienen a continuacion.
Para x > 0 se tiene el sistema (3.6), en el que la matriz del sistema vienedada por [
2γR −1γ2r − 1 0
].
Podemos calcular los autovalores de la matriz anterior resolviendo det(A−λI) = 0, obteniendose
λ = γR ± 1
Calculamos tambien los autovectores ν que cumplen
(A− λI)ν = 0.
Resolviendo se obtiene
ν =
[1
γR ∓ 1
].

40 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.19: Orbita de conexion homoclina en el plano de fases xy para unvalor de xR y de xL.
Transformamos nuestro sistema a un sistema homogeneo, llevando el equi-librio al origen de forma que{
x = 2γR(x− xR)− (y − yR)y = (γ2R − 1)(x− xR),
y haciendo el cambio de variable x = x−xR y y = y−yR, el sistema quedarıa{˙x = 2γRx− y˙y = (γ2R − 1)x.
Las expresiones de y+ e y− se obtienen partiendo de la posicion de equilibrio,a la que le sumamos un escalar por el autovector ν, lo que podemos expresarde la forma
Equilibro+ µ · autovector =
[0y±
],
Sustituyendo se obtiene[xRyR
]+ µ ·
[1
γR ∓ 1
]=
[0y±
].

3.2. CURVAS DE BIFURCACION 41
Sabiendo que yR = b+ 2γRxR, las expresiones de y+ e y− quedarıan
y+ = b+ (γR + 1)xR, (3.16)
y− = b+ (γR − 1)xR. (3.17)
Sustituyendo las expresiones (3.16) y (3.17) en el sistema (3.15), se puederepresentar la curva de bifurcacion de conexion homoclina en nuestro plano deparametros. En este caso, no es necesario aplicar el metodo de continuaciona las ecuaciones, pues el sistema resultante es un sistema lineal, y se puederepresentar la curva calculando los valores de los parametros xL y b paradistintos valores de t. El sistema quedarıa
b+ (γR + 1)xR = xL1− eγLt(cos t− γL sin t)
eγLt sin t
b+ (γR − 1)xR = −xL1− e−γLt(cos t+ γL sin t)
e−γLt sin t,
que se puede escribir en la forma matricial1− eγLt(cos t− γL sin t)
eγLt sin t−1
−1 + e−γLt(cos t+ γL sin t)
e−γLt sin t−1
[xLb
]=
[(γR + 1)xR(γR − 1)xR
].
Si multiplicamos por eγLt sin t y e−γLt sin t para eliminar los denominadoresobtenemos[
1− eγLt(cos t− γL sin t) −eγLt sin t−1 + e−γLt(cos t+ γL sin t) −e−γLt sin t
] [xLb
]=
[(γR + 1)xRe
γLt sin t(γR − 1)xRe
−γLt sin t
].
Podemos resolver este sistema por el metodo de Cramer. Calculamos primeroel determinante ∆ de la matriz del sistema, de forma que
∆ = −e−γLt sin t[1−eγLt(cos t−γL sin t)]+eγLt sin t[−1+e−γLt(cos t+γL sin t)],
y reordenando se obtiene
∆ = sin t(2 cosh(γLt) + cos t).
Para obtener la expresion de b
b =xR sin t
∣∣∣ 1−eγLt(cos t−γL sin t) (γR+1)xR−1+e−γLt(cos t+γL sin t) (γR−1)xR
∣∣∣sin t(2 cosh(γLt) + cos t)
.

42 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.20: Orbita en el plano de fases xy de la ultima homoclina. Se ilustratambien el tiempo de vuelo τ de la orbita.
Resolviendo el determinante y simplificando las expresiones lo maximoposible se tiene que
b = −xR(
sinh(γLt)− γL sin t
cosh(γLt)− cos t+ γR
). (3.18)
De forma analoga podemos obtener la expresion de xL resolviendo
b =xR sin t
∣∣∣ (γR+1)xR −eγLt sin t(γR−1)xR −e−γLt sin t)
∣∣∣sin t(2 cosh(γLt) + cos t)
.
Operando y simplificando se obtiene la expresion
xL = xRsin t
cosh(γLt)− cos t. (3.19)
Para dibujar la curva, hemos utilizado el software Mathematica y hemosdado valores desde t = 0 hasta t = τ , siendo este ultimo el valor de t maximoque puede alcanzar la orbita, es decir, cuando yL = 0, que se calculo en laseccion Curva critical crossing. En la figura 3.20 se ilustra el significado de τ .En concreto, la solucion representada en la figura 3.20 es la ultima homoclina.Podemos calcular el valor del parametro b mınimo para el cual existe la curvade conexion homoclina imponiendo que el valor de y+ = 0. De forma que
y+ = b+ (γR + 1)xR = 0,

3.2. CURVAS DE BIFURCACION 43
despejando b se obtiene
bmin = −(γR + 1)xR. (3.20)
Ası, para valores de y+ menores que cero, o valores de b menores que bmin lacurva de conexion homoclina no tiene sentido. Se obtendrıa una homoclinacon sliding como se muestra en la figura 3.21.
Figura 3.21: Orbita de conexion homoclina en el plano de fases xy para unvalor de y+ < 0 en la que se observa el tramo de sliding sobre el eje y.
Las curvas de conexion homoclina para los valores de los parametrosγL = 0,05 y γL = 0,15 se ilustran en las figuras 3.22 y 3.23.
Figura 3.22: Curva de conexion homoclina en el plano de parametros (xL, b)para γL = 0,15.

44 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.23: Curva de conexion homoclina en el plano de parametros (xL, b)para γL = 0,05.
Estos valores del parametro γL que hasta ahora se han utilizado para dibu-jar las curvas de bifurcacion no se han escogido de forma arbitraria, sino quehan sido elegidos de forma interesada para que la curva de conexion homocli-na pase por encima y por debajo del eje xL de nuestro plano de parametros.Ademas, en esta seccion se dibujaran todas las curvas para el valor de γL quehace que la curva de conexion homoclina pase justo por el origen de nuestroplano de parametros (ver [8]). Ese valor se obtiene imponiendo que
γcritL =1
πln
1− γR1 + γR
.
Con este valor de γcritL se obtiene la curva de bifurcacion de conexionhomoclina que se muestra en la figura 3.24.
Figura 3.24: Curva de conexion homoclina en el plano de parametros (xL, b)para γL = γcritL .
Como se puede observar en las figuras 3.22, 3.23 y 3.24 la curva de cone-xion homoclina tiene un caracter asintotico cuando xL →∞. Es decir, existeun valor de b maximo hacia el que tiende la curva cuando xL → ∞, o deforma equivalente, cuando t→ 0. Por lo que se cumple que
lımt→0
xL = +∞,
donde xL viene dada en la ecuacion (3.19).

3.2. CURVAS DE BIFURCACION 45
Figura 3.25: Curvas de bifurcacion en el plano de parametros (xL, b) paraγL = γcritL .
Figura 3.26: Curvas de bifurcacion en el plano de parametros (xL, b) paraγL = 0,15.
Para calcular el valor de b maximo hacia el que tiende la curva de bifur-cacion cuando t→ 0, calculamos
lımt→0
b = −xRγR,
donde la expresion de b viene dada en la ecuacion (3.18).
En las figuras 3.25, 3.26 y 3.27 se muestran todas las curvas de bifurcacionpara los tres valores del parametro γL estudiados. En dichas figuras se observafacilmente que las curvas de bifurcacion de conexion homoclina y criticalcrossing se cortan en un punto. Este punto es un nuevo punto de bifurcacion,al que llamamos critical crossing homoclinic connection, en el que coincidenla ultima homoclina con la ultima orbita de tipo crossing.
Las curvas critical crossing, silla nodo y la curva de conexion homoclinadelimitan una region que contiene tres ciclos lımites. Como se observa enlas siguientes figuras, esta region sera mas o menos pequena segun el valordel parametro γL. En las figuras 3.28, 3.29 y 3.30 se observan las regionesdelimitadas con tres ciclos lımites.

46 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.27: Curvas de bifurcacion en el plano de parametros (xL, b) paraγL = 0,05.
Figura 3.28: Region con tres ciclos lımites para γL = γcritL .
Figura 3.29: Region con tres ciclos lımites para γL = 0,15.

3.2. CURVAS DE BIFURCACION 47
Figura 3.30: Region con tres ciclos lımites para γL = 0,05.
Para ilustrar estos ciclos lımites se ha simulado de nuevo el sistema enDynamics Solver y se han obtenido los resultados que se muestran en lafigura 3.31.
Figura 3.31: Tres ciclos lımites obtenidos a partir de la simulacion del sistemaen Dynamics Solver tomando como valores de los parametros xL y b un puntoperteneciente a la region delimitada por las curvas silla nodo, critical crossingy conexion homoclina.
Se obtienen dos orbitas periodicas pequenas de crossing anidadas querodean el sliding set atractivo, y un tercer gran ciclo lımite que los rodea. Enla figura 3.32 se muestra un esquema con todas las curvas de bifurcacion conindicacion del numero de ciclos lımites que contiene cada una de las regionesdelimitadas por las curvas.

48 CAPITULO 3. EL CASO FOCO-SILLA
Figura 3.32: Curvas de bifurcacion en el plano de parametros (xL, b) conindicacion del numero de ciclos lımites que contienen cada una de las regionesdelimitadas o por las mismas.

Capıtulo 4
Conclusiones
En el presente proyecto hemos hecho un repaso por el metodo de continua-cion, sin el cual no habrıamos podido representar las curvas de bifurcacion,incluyendo un ejemplo sencillo a modo ilustrativo de aplicacion del mismo.Las ideas que se han expuesto del metodo de continuacion nos han permitidoresolver las ecuaciones que se han ido planteando durante la investigacion delcaso foco silla en sistemas planos discontinuos. Tambien hemos realizado unrepaso teorico de conceptos previos, de forma que se han explicado los siste-mas planos de forma generica, centrandonos en los conceptos mas relevantespara el caso que nos ha ocupado.
Como objetivo principal del proyecto hemos analizado el caso concretofoco silla en sistemas planos discontinuos. Hemos obtenido las curvas de bi-furcacion buckling, critical crossing, silla nodo y curva de conexion homoclinapara distintos valores de los parametros del sistema y hemos dibujado dichascurvas en un plano de paametros elegido. Hemos explicado tambien como seobtienen cada una de las curvas y hemos dibujado la orbita correspondienteen el plano de fases xy.
Como resultado de la investigacion hemos encontrado dos puntos de bifur-cacion: uno procedente de la curva silla nodo, en el que la tangencia invisiblepor la izquierda coincide con la tangencia invisible por la derecha; y otrogracias a la conexion de las curvas homoclina y critical crossing, en el que laultima homoclina coincide con la ultima orbita tipo crossing (critical crossinghomoclinic connection). Ademas hemos obtenido las expresiones analıticas delos puntos de bifurcacion, comprobando que para valores de los parametrosdados, los puntos de bifurcacion calculados de forma analıtica coinciden conlos que se obtienen de forma grafica.
49

50 CAPITULO 4. CONCLUSIONES
Tambien hemos observado que la curva de bifurcacion de conexion homo-clina presenta un caracter asintotico. Ademas hemos obtenido la expresionanalıtica de dicha asıntota.
Hemos demostrado que es posible obtener una region con tres ciclos lımi-te: la region delimitada por las curvas silla nodo, critical crossing y la curvade conexion homoclina, gracias a la combinacion de bifurcaciones locales yglobales. Hemos utilizado tambien el software Dynamics Solver para simularel sistema y poder ası ilustrar los ciclos lımites obtenidos en cada uno de loscasos.
En definitiva, el estudio de todas las posibles dinamicas, incluso en siste-mas planos discontinuos sigue siendo un reto. Gracias a la forma canonica,que es capaz de reducir el numero de parametros considerablemente, hemospodido conseguir realizar algunos avances.

Bibliografıa
[1] Angel Blanco Hierro Codigo de continuacion en Matlab para el analisisde orbitas periodicas en sistemas de baja diferenciabilidad. Proyecto Finde Carrera. Universidad de Sevilla. (Diciembre 2005)
[2] di Bernardo, M., Budd, C.J., Champneys, A.R., Kowalczyk, P.Piecewise-Smooth Dynamical Systems: Theory and Applications. Appl.Math. Sci., vol 163. Springer-Verlag London Ltd., London (2008)
[3] Freire, E., Ponce, E., Rodrigo, F., Torres, F. Bifurcation Sets of Con-tinuous Piecewise Linear Systems with Two Zones. Int. J. Bifurcationand Chaos 8, 2073–2097 (1998)
[4] Freire, E., Ponce, E., Torres, F. Canonical Discontinuous Planar Piece-wise Linear Systems. SIAM J. Appl. Dyn. Sys. 11, 181–211 (2012)
[5] Freire, E., Ponce, E., Torres, F. The Discontinuous Matching of TwoPlanar Linear Foci can have Three Nested Crossing Limit Cycles. Toappear in Publications Matematiques (2013)
[6] Freire, E., Ponce, E., Torres, F. On the Critical Crossing Cycle Bifurca-tion in Planar Filippov Systems. Preprint. Submitted for publication.
[7] Freire, E., Ponce, E., Torres, F. A general mechanism to generate threelimit cycles in planar Filippov systems with two zones. Nonlinear Dyn78, 251–263 (2014)
[8] Freire, E., Ponce, E., Torres, F., Rivera, A. Getting three limit cyclesthrough simultaneous local and global bifurcations in piecewise linearFilippov systems. Nonlinear Dyn 78, 251–263 (2014)
[9] Guardia, M., M.-Seara, T., Teixeira, M.A. Generic Bifurcations of LowCodimension of Planar Filippov Systems. J. Diff. Equations 250, 1967–2023 (2011)
51

52 BIBLIOGRAFIA
[10] Llibre, J., Ponce, E. Three Nested Limit Cycles in Discontinuous Pie-cewise Linear Differential Systems. Dyn. Cont. Discr. Imp. Sys. B 19,325–335 (2012)
[11] Molero, M.,Salvador, A., Menarguez, T., Garmendia, L. Analisis ma-tematico para Ingenierıa. Capıtulo 12. Sistemas dinamicos, 775–822.
[12] Simpson, D.J.W. Bifurcations in Piecewise-Smooth Continuous Sys-tems. World Scientific Series on Nonlinear Science A, vol 69. WorldScientific, Singapore (2010)