Levación en Grúas y Ascensores
83
UNIVERSIDAD SIMÓN BOLÍVAR DECANATO DE ESTUDIOS PROFESIONALES COORDINACIÓN DE INGENIERÍA ELÉCTRICA DISEÑO Y CONSTRUCCIÓN DE MODELO PARA ELEVACIÓN EN GRÚAS Y ASCENSORES CON VARIADORES DE VELOCIDAD Por: ANTONIO G. RODRÍGUEZ A. INFORME DE PASANTÍA Presentado ante la Ilustre Universidad Simón Bolívar como requisito parcial para optar al título de Ingeniero Electricista Sartenejas, Enero de 2009
-
Upload
audi-agamez -
Category
Documents
-
view
27 -
download
3
description
ascensores
Transcript of Levación en Grúas y Ascensores
UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES COORDINACIÓN DE INGENIERÍA ELÉCTRICA
DISEÑO Y CONSTRUCCIÓN DE MODELO PARA ELEVACIÓN EN GRÚAS Y
ASCENSORES CON VARIADORES DE VELOCIDAD
Por: ANTONIO G. RODRÍGUEZ A.
INFORME DE PASANTÍA Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de Ingeniero Electricista
Sartenejas, Enero de 2009

UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES COORDINACIÓN DE INGENIERÍA ELÉCTRICA
DISEÑO Y CONSTRUCCIÓN DE MODELO PARA ELEVACIÓN EN GRÚAS Y
ASCENSORES CON VARIADORES DE VELOCIDAD
Por: ANTONIO G. RODRÍGUEZ A.
Realizado con la asesoría de: Tutor Académico: Prof. José H. Vivas Tutor Industrial: Ing. Enma Medina
INFORME DE PASANTÍA Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de Ingeniero Electricista
Sartenejas, Enero de 2009

iv
DISEÑO Y CONSTRUCCIÓN DE MODELO PARA ELEVACIÓN EN GRÚAS Y
ASCENSORES CON VARIADORES DE VELOCIDAD
POR
ANTONIO G. RODRÍGUEZ A.
RESUMEN
El presente proyecto se desarrolla en la empresa Schneider Electric Venezuela, S. A.
como una forma de impulsar la actividad de variación de velocidad en los mercados
industriales, de energía e infraestructura, asociados con el uso de grúas y ascensores. En las
aplicaciones relacionadas al transporte de personas y carga, el movimiento de elevación es
parte fundamental del funcionamiento. Para realizar elevaciones eficaces, seguras, y lo más
eficientes posibles, es necesario contar con métodos de control que permitan no solo
modificar a voluntad la velocidad del movimiento, sino proporcionar medios para proteger a
las personas y equipos involucrados, así como garantizar el manejo de las variables mecánicas
y eléctricas según los requerimientos de la aplicación. A lo largo del desarrollo del trabajo se
estudian los fundamentos teóricos presentes en la elevación utilizando motores eléctricos de
inducción y variadores de velocidad como elementos principales, se especifica el diseño de un
modelo capaz de demostrar elevaciones bajo condiciones similares a las que se consiguen
normalmente en las industrias, y se ejecuta su construcción garantizando que se cumplen
requerimientos técnicos y económicos, que permiten utilizar el modelo en demostraciones y
entrenamientos asociados a los variadores de velocidad en los mercados de interés. Asimismo
se realizan pruebas de funcionamiento, comparaciones técnicas y económicas con modelos
similares en otros países, y se concluye en las posibilidades del uso del modelo construido
para mejorar el desempeño técnico de grúas y ascensores.

v
A mis padres, sin quienes lograr una carrera
habría sido imposible, por todo su apoyo prestado a lo
largo de estos años y especialmente durante el periodo de
pasantía. Son y serán una inspiración para permitirme
mejorar cada día.
vi
AGRADECIMIENTOS Y RECONOCIMIENTOS
A la Universidad Simón Bolívar, profesores, personal administrativo, obreros,
estudiantes e instalaciones, por convertir un adolescente en un profesional preparado,
consciente, y siempre en búsqueda del ideal de excelencia.
A mis padres una vez más, por su ayuda incondicional en lo moral, económico, social,
técnico, y académico. A mi madre por sus sacrificios por darme una educación.
A mis amigos dentro y fuera de la universidad, Luis Guzmán, Licel Codeghini, Simón
Siher, Óscar Salgado, Juan Pablo Castillo, Ronny Díaz, entre otros. Su apoyo constante en las
buenas y las malas hacen posible cualquier sueño.
A los profesores Juan Pino, José Vivas, Antonio De Santis, entre otros por su
colaboración particular en mi carrera y la pasantía desarrollada.
A los compañeros en Schneider Electric Venezuela S. A., José Sabas, Denis Sanchez,
Marcel Castro, Alexander González, Enma Medina, Homero Álvarez, Jose Luis Orive, entre
muchos otros. Su colaboración y enseñanzas me permitieron alcanzar las metas del proyecto y
hacer la transición al mundo real de la ingeniería.

vii
ÍNDICE GENERAL
ÍNDICE DE TABLAS ........................................................................................................ ix ÍNDICE DE FIGURAS ....................................................................................................... x LISTA DE SÍMBOLOS Y ABREVIATURAS ................................................................ xii INTRODUCCIÓN ............................................................................................................... 1 Antecedentes y planteamiento del problema ........................................................... 1 Objetivo General ...................................................................................................... 2 Objetivos específicos ............................................................................................... 2 Metodología de trabajo ............................................................................................ 2 CAPÍTULO 1 DESCRIPCIÓN DE LA EMPRESA ............................................................................... 5
1.1 – Identificación ................................................................................................. 5 1.2 – Reseña histórica ............................................................................................. 6 1.3 – Organización .................................................................................................. 7
CAPÍTULO 2 EL MOVIMIENTO DE ELEVACIÓN EN GRÚAS Y ASCENSORES ...................... 9 2.1 – Grúas y elementos afines .............................................................................. 10 2.1.1 – Particularidades de la elevación en grúas ...................................... 12 2.2 – Ascensores .................................................................................................... 13 2.2.1 – Particularidades de la elevación en ascensores .............................. 13 CAPÍTULO 3 MÁQUINAS DE INDUCCIÓN Y VARIADORES DE VELOCIDAD ...................... 15 3.1 – La máquina de inducción .............................................................................. 15 3.1.1 – Composición y funcionamiento ..................................................... 15 3.1.2 – Curvas características ..................................................................... 17 3.3 – Variadores de velocidad ............................................................................... 21 3.3.1 – Leyes de control ............................................................................. 22 CAPÍTULO 4 LA MAQUETA INDUSTRIAL DE ELEVACIÓN ...................................................... 24 4.1 – Motivación .................................................................................................... 24 4.2 – Antecedentes ................................................................................................. 24 4.3 – El mercado venezolano ................................................................................. 25 4.4 – Diseño preliminar del modelo a construir .................................................... 27 4.5 – El motorreductor ........................................................................................... 29 4.6 – Variador de velocidad Telemecanique Altivar 71 ........................................ 31 4.7 – Módulo motor ............................................................................................... 33 4.8 – Módulo carga ................................................................................................ 36 4.9 – Módulo variador ........................................................................................... 37 4.9.1 – Esquema de potencia ...................................................................... 37 4.9.2 – Esquema de control ........................................................................ 39 4.10 – Módulo estructura ....................................................................................... 42 4.11 – Construcción y modelo terminado .............................................................. 43 4.12 – Funciones utilizadas y configuradas ........................................................... 46
viii
4.13 – Aspectos económicos y de mercado ........................................................... 49 CAPÍTULO 5 PRUEBAS Y RESULTADOS ........................................................................................ 52 5.1 – Prueba a lazo abierto ..................................................................................... 54 CONCLUSIONES Y RECOMENDACIONES ................................................................ 60 REFERENCIAS BIBLIOGRÁFICAS .............................................................................. 62 APÉNDICES Apéndice A – Coordinación de protecciones EcoDial© ........................................ 63 Apéndice B – Planos del motorreductor ................................................................ 68 Apéndice C – Manual de usuario ........................................................................... 69
ix
ÍNDICE DE TABLAS
Tabla 4.1 – Tabla completa de materiales y costos asociados ........................................... 50
Tabla 5.1 – Prueba a lazo abierto con carga 0 Kg. ............................................................ 54
Tabla 5.2 – Prueba a lazo abierto con carga 50 Kg. .......................................................... 55
Tabla 5.3 – Prueba a lazo abierto con carga 100 Kg. ........................................................ 55
Tabla 5.4 – Prueba a lazo abierto con carga 150 Kg. ........................................................ 55
x
ÍNDICE DE FIGURAS
Figura 1.1 – Principales marcas representadas por Schneider Electric .................................. 5
Figura 1.2 – Sede principal Schneider Electric Venezuela S. A. ............................................ 6
Figura 1.3 – Organigrama directivo Schneider Electric Venezuela S. A. .............................. 7
Figura 1.4 – Organigrama de mercadeo Schneider Electric Venezuela S. A. ........................ 8
Figura 1.5 – Laboratorio de calidad y servicio en variación de velocidad ............................. 8
Figura 2.1 – Los cuadrantes de par y velocidad en las máquinas ......................................... 10
Figura 2.2 – Algunos tipos de grúas existentes .................................................................... 11
Figura 3.1 – La máquina de inducción (corte), estator y rotor ............................................. 16
Figura 3.2 – Zonas de operación de la máquina de inducción (J. M. Aller, 2008) .............. 16
Figura 3.3 – Curva par-deslizamiento de la máquina de inducción (A. Bueno, 2007) ........ 17
Figura 3.4 – Par y potencia ante variaciones en la tensión en M. I. (A. Bueno, 2007) ........ 18
Figura 3.5 – Par y potencia ante variaciones en la frecuencia en M. I. (A. Bueno, 2007) . .. 19
Figura 3.6 – Par y potencia ante variaciones v/f constantes en M. I. (A. Bueno, 2007) ...... 19
Figura 3.7 – Diagrama en bloques del controlador directo de par (A. Bueno, 2007) .......... 20
Figura 3.8 – Esquema básico de funcionamiento del variador de velocidad ....................... 22
Figura 4.1 – Modelo de demostración LEVAGE (Francia) ................................................. 25
Figura 4.2 – Variadores Altivar 31 en montaje de grúa IMPSA .......................................... 27
Figura 4.3 – Los cuatro módulos esenciales de la maqueta a construir ................................ 28
Figura 4.4 – Diagrama mecánico básico ............................................................................... 29
Figura 4.5 – Motorreductor SEW Eurodrive utilizado en el proyecto ................................. 31
Figura 4.6 – Variador de velocidad Altivar 71 ..................................................................... 32
Figura 4.7 – Chumacera tipo puente, eje 35mm ................................................................... 33
Figura 4.8 – Sensor de fin de carrera tipo “tornillo” para grúas ........................................... 34
Figura 4.9 – Planos de carrete y acople utilizados para la fabricación ................................. 34
Figura 4.10 – Resistencias de frenado. De elevación, de uso general .................................. 35
Figura 4.11 – Codificadores incrementales y su funcionamiento ........................................ 36
Figura 4.12 – Celda de carga, tipo tensión ........................................................................... 37
Figura 4.13 – Gabinete de compuesto de poliéster utilizado para control y protecciones ... 37
Figura 4.14 – Esquema de conexión de potencia utilizado .................................................. 39
Figura 4.15 – Esquema de conexiones de control utilizado ................................................. 41
Figura 4.16 – Velocidades y fines de carrera ....................................................................... 41
Figura 4.17 – Armario desarmable Himel utilizado en el proyecto ..................................... 42

xi
Figura 4.18 – Construcción del módulo variador ................................................................. 43
Figura 4.19 – El módulo estructura y el módulo variador .................................................... 44
Figura 4.20 – Refuerzo y montaje de módulo motor ............................................................ 44
Figura 4.21 – Montaje de módulo carga ............................................................................... 44
Figura 4.22 – Maqueta industrial de elevación ..................................................................... 45
Figura 4.23 – Pantalla ATV71, conexiones, y banco de prueba .......................................... 46
Figura 4.24 – El freno y la función lógica de frenado .......................................................... 47
Figura 4.25 – La tarjeta programable “controller inside” ..................................................... 49
Figura 5.1 – Prueba de funcionamiento básico .................................................................... 53
Figura 5.2 – Prueba básica de movimiento ........................................................................... 53
Figura 5.3 – Gráfica velocidad de referencia vs velocidad lineal para 0Kg y 150Kg .......... 56
Figura 5.4 – Gráfica velocidad de referencia vs potencia máxima de salida para 150Kg .... 57
Figura 5.5 – Gráfica velocidad de referencia vs par máximo para 150Kg ........................... 57
Figura 5.6 – Gráfica vel. de ref. vs temp. máx. en resistencia de frenado para 150Kg ........ 58

xii
LISTA DE SÍMBOLOS Y ABREVIATURAS
A Ampere / Amperios ATV Altivar CANopen Protocolo de comunicaciones de red de área controlada CIC Centro de Atención al Cliente cm Centímetros ENA Sistema de ahorro de energía F Fuerza g Fuerza de gravedad HP Horse power / Caballos de fuerza Hz Hertz IEC Comisión Electrotécnica Internacional IGBT Insulated gate bipolar transistor / Transistor bipolar de compuerta aislada Kg Kilogramos kV Kilovoltio kW Kilowatts / Kilovatios LCD Pantalla de cristal líquido m Masa m/min Metros por minuto m/s Metros por segundo m/s2 Metros por segundo cuadrado mA Miliamperios mm Milímetros Modbus Protocolo de comunicaciones Modicon N.m Newton metro P Potencia PLC Controlador Lógico Programable ppr Puntos por revolución rpm Revoluciones por minuto T Par mecánico v Velocidad lineal V Voltios VAC Voltios en corriente alterna VDC Voltios en corriente contínua VFD Variable frecuency drive / Variador de frecuencia VSD/VVD Variable speed drive / Variador de velocidad W Watts / Vatios Ω Ohm / Ohmios ω Velocidad angular
1
INTRODUCCIÓN
Antecedentes y planteamiento del problema
En las industrias de elevación de cargas tanto en grúas como en ascensores el
movimiento de elevación (movimiento vertical o izamiento) es de vital importancia, pues
debe permitir el desplazamiento de un móvil bajo condiciones particulares de forma segura.
Se debe tener en cuenta que éste presenta una serie de particularidades que hacen que su
diseño y manejo no sea simple. Al realizar la elevación utilizando motores sin ningún tipo de
control aparecen inconvenientes a nivel técnico, económico y de seguridad para los
operadores y las mismas cargas elevadas tales como: la ausencia de control sobre la
velocidad, la falta de par en las etapas de arranque, la imposibilidad de sostener las cargas en
condiciones particulares del movimiento, la existencia de movimientos bruscos durante el
desplazamiento, la duración del ciclo de traslado, entre otras. ¿Cuál sería la metodología que
permite realizar dicho desplazamiento evitando los problemas mencionados?
El uso de variadores de velocidad como medios de control de motores puede ser una
solución al problema propuesto, sin embargo se debe además estudiar el problema desde el
punto de vista práctico para las empresas venezolanas que utilizan las grúas (y ascensores),
logrando así adaptar la solución a la realidad de la industria nacional para hacerla más
competitiva.
De esta forma se presentará el desarrollo de una maqueta industrial de elevación,
como un modelo que incorpore los variadores de velocidad y otros componentes tanto
mecánicos como de automatización y control, que permita realizar un estudio particular de
caso para analizar el problema y concluir en una solución. Adicionalmente se desea que el
desarrollo de la maqueta permita su uso posterior para entrenamientos, demostraciones y la
posibilidad de continuar desarrollando mejoras a las soluciones asociadas a los variadores de
velocidad.

2
Objetivo general
Diseñar y construir un modelo o maqueta industrial que permita estudiar los problemas
y soluciones asociados al movimiento de elevación en grúas y ascensores, valiéndose para
ello de variadores de velocidad como elementos principales de control.
Objetivos específicos
• Estudiar el movimiento de elevación de cargas y sus particularidades, orientado a
las grúas y los ascensores.
• Estudiar el principio de funcionamiento de los variadores de velocidad como
herramientas de control de motores, así como las leyes de control asociadas.
• Investigar la realidad actual de las industrias de elevación del país, así como los
inconvenientes principales y posibles mejoras.
• Diseñar un modelo o maqueta que permita estudiar las ventajas de la utilización de
variadores de velocidad en la elevación de cargas de forma práctica y segura,
considerando además su facilidad de traslado para entrenamientos y
presentaciones.
• Realizar los planos del diseño.
• Definir la procura de los materiales asociados al modelo diseñado.
• Construir la maqueta industrial.
• Realizar pruebas documentadas que demuestren las formas de solucionar los
problemas del izamiento de cargas utilizando la maqueta construida.
• Crear los manuales de uso, pruebas y mantenimiento asociados.
Metodología de trabajo
Para cumplir con los objetivos propuestos, y siguiendo el plan de trabajo previamente
establecido (ver anexos) en los tiempos definidos (20 semanas), es necesario trazar una
metodología o estrategia de trabajo a realizar a lo largo de la pasantía.

3
De esta forma se acordó comenzar el trabajo realizando ensayos a pequeña escala, con
pequeños motores y variadores de poca potencia, para aprender las bases de la variación de
velocidad y las diferencias entre las elevaciones controladas y no controladas. Posteriormente
se procedería a investigar la industria venezolana de grúas y ascensores a través de visitas a
los fabricantes y documentación técnica en estos temas, así como los antecedentes de
proyectos similares a nivel nacional e internacional. Con esto sería posible definir un diseño
para el modelo a construir, proceder a la procura de los materiales, y efectuar la construcción.
Finalizando el proceso con las pruebas de funcionamiento que permitan analizar los
resultados logrados.
Sin embargo en función de las limitaciones encontradas este plan fue adaptado para
cumplir con los plazos establecidos, alterando el orden en que se realizarían las actividades.
Entre las limitaciones mencionadas se puede considerar:
• Disponibilidad de material práctico (equipos) para realizar ensayos preliminares del
estudio
• Plazos asociados a la importación de las partes necesarias en el proyecto
• Presupuesto disponible para la realización del proyecto
• Precios de importación dependientes del cambio monetario internacional
• Necesidad de adaptación de las piezas para su correcta implementación en el caso
particular del proyecto
En el desarrollo de los siguientes capítulos o secciones del trabajo se encontrarán los
siguientes temas a tratar. En el capítulo 1 se describirá brevemente la empresa donde se llevó
a cabo la pasantía. Posteriormente en los capítulos 2 y 3 se estudiaran los conceptos básicos
necesarios para la comprensión del proyecto realizado: grúas y ascensores, características
particulares del movimiento de elevación con un enfoque electromecánico, la máquina de
inducción como elemento principal de accionamiento, los variadores de velocidad, reseña
histórica de la forma como se ha controlado la velocidad de las máquinas hasta nuestros días,
y las leyes de control asociadas. Luego para el capítulo 4 se presentará la maqueta industrial
de elevación como solución al problema planteado, antecedentes, situación del mercado
venezolano, diseño, definición y procura de materiales, así como las características y
particularidades de su construcción. Finalmente en el capítulo 5 se reportarán las pruebas de
funcionamiento realizadas y resultados finales. Cerrando el informe con las respectivas
4
conclusiones que permitan dar una idea global del cumplimiento de objetivos y actividades
alcanzado.

CAPÍTULO 1
DESCRIPCIÓN DE LA EMPRESA
1.1 - Identificación
La empresa Schneider Electric Venezuela S. A. es la representante en el país del
grupo internacional Schneider Electric. Sus operaciones están dedicadas a la importación,
venta y asesoría de productos, soluciones y servicios en el marco de la industria eléctrica,
particularmente en niveles de baja y media tensión. Actualmente está posicionada como la
primera empresa del mundo en baja tensión y control industrial, la segunda en media tensión
y ultraterminal, y la tercera en automatización industrial. Cuenta con una facturación anual de
alrededor de 10 millardos de euros y se encuentra presente en 130 países, con más de 190
fábricas y 74 mil empleados, proporcionando los más elevados niveles tecnológicos, y de
conformidad con los principales estándares de calidad internacionales.
Cuenta con tres grandes marcas internacionales: Merlin Gerin, Square D y
Telemecanique, y más de setenta marcas locales entre las que encontramos en Venezuela:
Prime, APC, Pelco, entre otras (Figura 1.1). A partir del año 2008 la empresa fusionó la
mayoría de las marcas representadas bajo el nombre “Schneider Electric” para unificar la
visión ante los clientes e impulsar el valor de mercadeo.
Figura 1.1 – Principales marcas representadas por Schneider Electric

6
Actualmente en Venezuela Schneider Electric cuenta con una sede principal en la
ciudad de Guatire (Figura 1.2) donde se encuentra un almacén y edificio de oficinas, así como
una sede auxiliar para servicios y adaptaciones, ocupando dos galpones en ubicaciones
distintas que cubren en conjunto una parcela de más de 2000m2. Adicionalmente la empresa
cuenta con oficinas comerciales en las ciudades de Caracas, Valencia, Barquisimeto,
Barcelona y Pto. Ordaz, así como representantes comerciales y una gama de distribuidores,
tableristas e integradores asociados a lo largo del territorio nacional que permiten una relación
más eficiente con los clientes finales.
Figura 1.2 – Sede principal Schneider Electric Venezuela S. A.
1.2 - Reseña histórica
Schneider Electric es una empresa de origen francés, que nace de la visión de un grupo
de hermanos que dedicaron su vida a la investigación de la electricidad y lograron explotar el
potencial de la industria inicialmente en los Estados Unidos y Francia.
En Venezuela Telemecanique inicia la comercialización de los productos en 1977, con
una planta en Barquisimeto y una línea de producción de contactores. Merlín Gerin inicia
sus operaciones en 1990, con la comercialización en directo de tableros y soluciones en
Distribución Eléctrica. En 1994 se crea Schneider en Venezuela, ofreciendo productos y
soluciones de las marcas Merlin Gerin, Square D y Telemecanique, ampliando las actividades
a la fabricación y comercialización de tableros en media y baja tensión, así como los centros
de control de motores. En 1999 el nombre de la empresa pasa a ser Schneider Electric
7
Venezuela S.A. Para 2004 las operaciones son trasladadas a la sede de Guatire, a la vez que se
emprende una nueva forma de hacer negocios confiando a socios estratégicos nacionales la
fabricación de tableros y soluciones en media y baja tensión. Simultáneamente se crea el
Centro de Información al Cliente (CIC), para brindar una respuesta rápida y eficaz a los
requerimientos de los clientes.
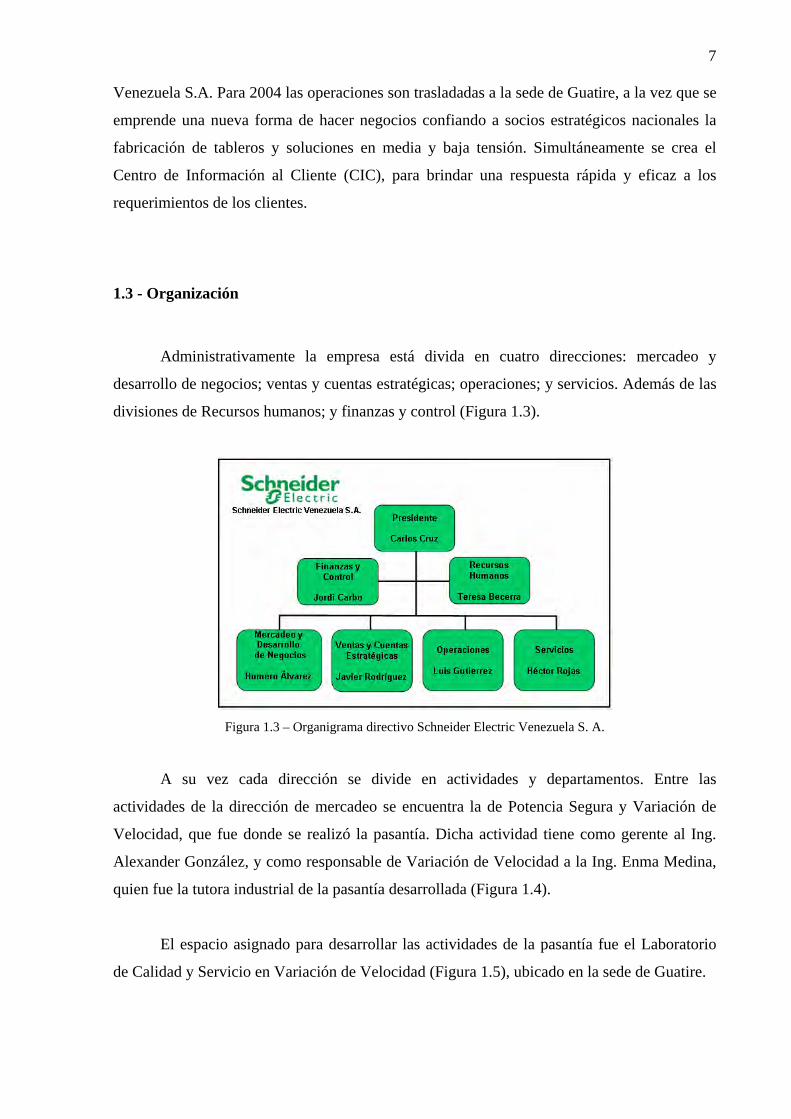
1.3 - Organización
Administrativamente la empresa está divida en cuatro direcciones: mercadeo y
desarrollo de negocios; ventas y cuentas estratégicas; operaciones; y servicios. Además de las
divisiones de Recursos humanos; y finanzas y control (Figura 1.3).
Figura 1.3 – Organigrama directivo Schneider Electric Venezuela S. A.
A su vez cada dirección se divide en actividades y departamentos. Entre las
actividades de la dirección de mercadeo se encuentra la de Potencia Segura y Variación de
Velocidad, que fue donde se realizó la pasantía. Dicha actividad tiene como gerente al Ing.
Alexander González, y como responsable de Variación de Velocidad a la Ing. Enma Medina,
quien fue la tutora industrial de la pasantía desarrollada (Figura 1.4).
El espacio asignado para desarrollar las actividades de la pasantía fue el Laboratorio
de Calidad y Servicio en Variación de Velocidad (Figura 1.5), ubicado en la sede de Guatire.
8
Figura 1.4 – Organigrama de Mercadeo Schneider Electric Venezuela S. A.
Figura 1.5 – Laboratorio de Calidad y Servicio en Variación de Velocidad. Schneider Electric Venezuela

CAPÍTULO 2
EL MOVIMIENTO DE ELEVACIÓN EN GRÚAS Y ASCENSORES
Muchas industrias nacionales e internacionales, así como los equipos de movimiento
de personas y carga, requieren el desplazamiento de objetos o materiales de un lugar a otro.
En aquellos casos donde el peso de los móviles es apreciable se requiere de medios
electromecánicos o hidráulicos para conseguir el desplazamiento, pues hacerlo sólo por
medios mecánicos o simplemente con mano de obra resultaría imposible, impráctico,
ineficiente o poco económico.
De acuerdo a los cuadernos técnicos consultados las grúas y ascensores, al igual que
las cintas transportadoras y otros accionamientos similares, son aplicaciones donde la carga es
del tipo par constante (D. Clenet, 2005 [13]). Para garantizar que se efectúa el movimiento de
forma segura, fluida y coordinada la característica del par de la carga no debe depender de la
velocidad, en otras palabras se quiere que el par de la carga sea aproximadamente el mismo en
el rango completo de velocidades. Se debe tener en cuenta que para estas aplicaciones la
potencia aumenta linealmente a medida que aumenta la velocidad y viceversa.
Al estudiar el sentido de giro del motor y sentido del par en una aplicación, en lo que
se denomina comúnmente los cuadrantes par-velocidad o zonas motor-generador (Figura 2.1),
es posible clasificar las aplicaciones en tres grupos. En primer lugar las aplicaciones de un
cuadrante: aquellas donde el sentido de giro y del par siempre van en la misma dirección (por
ejemplo las bombas y los ventiladores), luego las aplicaciones de dos cuadrantes: donde el
sentido de giro es siempre el mismo pero el par puede venir en un sentido u otro (por ejemplo
las máquinas de extracción en pozos petroleros), y finalmente las de cuatro cuadrantes: donde
tanto el sentido de giro como el par pueden venir en ambas direcciones (por ejemplo las grúas
y ascensores). Es de destacar que existen entonces cuadrantes o zonas de aplicación en la
elevación donde la máquina pasa a comportarse como un generador, esta particularidad debe
ser tomada en cuenta en el análisis y dimensionamiento.

10
Figura 2.1 – Los cuadrantes de par y velocidad en las máquinas
De acuerdo a la industria y el accionamiento existen varios tipos de movimientos
diferenciables. En una grúa por ejemplo, es posible observar la elevación, traslación del carro,
traslación de la grúa, el giro o posicionamiento, entre otras; por otra parte en un ascensor, se
tiene la elevación, y la apertura o cierre de puertas. A los efectos de este proyecto sólo se
estudiará el movimiento de elevación o izamiento. Adicionalmente se debe hacer una
diferencia entre la elevación en grúas y la elevación en ascensores, pues su función particular
implica condiciones, requerimientos y retos diferentes.
2.1 - Grúas y elementos afines
Una grúa puede definirse como un elemento mecánico o electromecánico capaz de
trasladar cargas de un lugar a otro de forma segura. Existen muchos tipos de grúas (Figura
2.2) que pueden clasificarse de acuerdo a su construcción o su uso, entre las más comunes
encontramos:
• Puente grúa de riel doble: Compuesta generalmente por una doble estructura
rematada, con motores sincronizados dotados de ruedas con doble pestaña para su
encarrilamiento. Apoyado en dicha estructura se encuentra un carro automotor que
soporta un polipasto. La combinación de movimientos de estructura y carro permite
actuar sobre cualquier punto de una superficie, delimitada por la longitud de los raíles
por los que se desplazan los testeros y por la separación entre ellos.
• Puente grúa de riel simple o grúa suspendida: Su composición es similar al puente
grúa de riel doble, pero se apoya sobre una estructura rematada única, o viga.

11
Normalmente este tipo de diseños se utiliza para manejar cargas más ligeras que las
del caso birrail.
• Grúa pórtico: Está constituida por una estructura en forma de puente con soportes
fijos y una máquina elevadora, está diseñada para trasladarse a lo largo de raíles al
nivel del suelo. Usualmente se utiliza en puertos o galpones para desplazar
contenedores o cargas de gran peso.
• Grúa giratoria o torre: Compuesta por una estructura metálica desmontable y
motores, está especialmente diseñada para trabajar como herramienta en la
construcción. Entre este tipo de grúas se tiene la fija apoyada, fija empotrada, móvil
con traslación, móvil trepadora y móvil telescópica.
• Transtainer o grúa Luffing: Grúa móvil empleada en el transporte y estiba de
contenedores, semejante a la grúa pórtico pero cuyo desplazamiento se realiza gracias
a ruedas de goma ubicadas en la base de su estructura.
• Grúa auto-desplegable: Pequeñas grúas de construcción de fácil transporte y de
montaje más o menos automático. Entre estas se puede incluir los “winches”.
• Grúa Derrick: Compuesta por un mástil sujeto en posición vertical mediante un
trípode fijo de acero o patas de madera, en el mástil vertical fijo se articula un brazo o
pluma que puede trabajar en distintas posiciones y ángulos de orientación. Es una
máquina pesada dedicada a la elevación de grandes cargas, habitualmente es destinada
a trabajo fijo con el radio de acción determinado por el alcance de la pluma.
• Grúa horquilla: Conocida como montacargas, son pequeños vehículos de carga con
paletas dispuestas para la elevación y traslado de objetos usualmente dispuestos sobre
una base de listones de madera.
• Polipastos: Sistemas mecánicos dispuestos de juegos de poleas que permiten la
modificación de la relación de par y velocidad a la entrada y salida del equipo. Son
utilizados como elemento constructivo de muchos tipos de grúas.
Figura 2.2 – Algunos tipos de grúas existentes
(de izquierda a derecha - arriba: puente grúa riel doble, detalle grúa auto-desplegable, puente grúa riel doble,
grúa giratoria - abajo: grúa horquilla, grúa auto-desplegable, puente grúa riel simple)

12
2.1.1 - Particularidades de la elevación en grúas
Cuando se dispone de grúas para trasladar materiales el movimiento de elevación debe
ser estudiado con cuidado, pues de no realizarlo correctamente puede traer riesgos a las
personas y los bienes materiales, así como pérdidas de tiempo, energía o insumos que se
traducen en baja productividad.
Desde el punto de vista mecánico el izamiento de cargas requiere un gran par para
vencer la inercia del objeto a desplazar, especialmente en la etapa inicial del movimiento de
ascenso donde se tiene velocidad nula. Existe una relación directa entre la velocidad de
elevación y el par aplicado. En un izamiento sin control (con la utilización simple de motores
para elevar las cargas) el movimiento de ascenso se efectúa de forma lenta al inicio, e incluso
puede que no se logre el par necesario para iniciar el movimiento, dependiendo del peso a
elevar y la potencia del motor. Al vencer la inercia y empezar a elevar la carga, pueden
producirse sacudidas o movimientos bruscos que implican esfuerzos mecánicos y oscilaciones
sobre los soportes y estructuras que pueden traer consigo daños importantes. Los motores
autoventilados además, a bajas velocidades tienen limitaciones mayores dado que la
temperatura máxima a la que pueden operar es menor. Por estas razones el arranque en un
movimiento de izamiento es un punto crítico a considerar.
Por otra parte durante el descenso, a medida que la carga baja transforma su energía
potencial en energía cinética acelerando el movimiento debido a la acción de la gravedad
sobre su propia masa. Ésta aceleración puede llegar al punto de originar la velocidad terminal
en el descenso si no se dispone de dispositivos de supervisión del movimiento, y pueden
traducirse en daños a personas o a los mismos materiales elevados. Adicionalmente de no
dimensionar adecuadamente los componentes existe la posibilidad que la grúa no sea capaz de
sostener el peso de la carga en una altura determinada, produciendo el desplome de la misma.
Al analizar los fenómenos eléctricos en motores usados para izamiento, el descenso implica
una inversión del sentido de la corriente (el motor pasa a ser un generador u opera en un
cuadrante distinto de la curva par-velocidad). Estas corrientes pueden producir daños
materiales sobre el motor y los equipos conectados por lo que deben supervisarse. La ausencia
de control implica que no se puede decidir sobre la velocidad del movimiento, en otras
palabras la velocidad de elevación dependerá en todo momento del peso que se esté
levantando.

13
Otras particularidades serán estudiadas a lo largo de la descripción de las actividades
que se realizaron en la pasantía.
2.2 - Ascensores
El ascensor es un dispositivo para el transporte vertical de pasajeros y cargas a
diferentes plantas o niveles típicamente usado en edificios. Consisten en una cabina
sustentada por cables que se desplaza dentro de un ducto con guías verticales de acero,
mecanismos de subida y bajada, y una fuente de energía. Cuenta normalmente con dos
máquinas para su movimiento, una que realiza la elevación, y otra que realiza la apertura y
cierre de puertas.
Entre los tipos de ascensores encontramos: ascensores a tracción, de tracción directa,
de tracción con engranajes, y ascensores hidráulicos, que difieren entre sí por el mecanismo
que traduce la energía eléctrica o mecánica en movimiento de elevación.
2.2.1 - Particularidades de la elevación en ascensores
Las particularidades del izamiento en ascensores incluyen todas las descritas para el
caso de las grúas. La diferencia radica básicamente en: la posibilidad de utilizar contrapesos
que representan una opción práctica debido al espacio sobrante en los ductos, sensores para
establecer los puntos definidos de paradas en cada piso, así como los requerimientos de
confort de pasajeros que implican la necesidad de atenuar aún más los movimientos bruscos y
controlar la velocidad (manejo del “jerk” o impulso inicial del movimiento).
Merece la pena comentar que en las aplicaciones de ascensores, grúas y elevadores la
máquina de accionamiento (típicamente una máquina de inducción) trabaja en los cuadrantes
de la curva par-velocidad como generador de forma frecuente. Como se verá más adelante
éste régimen de operación de la máquina es menos eficiente que el resto de las zonas a tal
punto que resulta preferible utilizar otras alternativas de accionamiento. Por esta razón es
común observar en los ascensores la existencia de contrapesos para equilibrar la carga que se

14
estima será la más frecuente, evitando así la prolongada operación de la máquina de inducción
en la zona generador y logrando a fin de cuentas aumentar la eficiencia del conjunto.
El movimiento del ascensor debe ser suave con valores aceptables de aceleración,
deceleración y límites en el “jerk”, que es la derivada de la aceleración con respecto al
tiempo, para asegurar la calidad del viaje a los pasajeros transportados. Los cambios bruscos
en la aceleración pueden resultar desagradables e incluso dolorosos, las fábricas de ascensores
miden la incomodidad del pasajero mediante el impulso o “jerk”. Durante las subidas y
bajadas éste se produce porque la aceleración cambia en magnitud y sentido. En definitiva se
miden posiciones, velocidades, y aceleraciones para garantizar el confort.

CAPÍTULO 3
MÁQUINAS DE INDUCCIÓN Y VARIADORES DE VELOCIDAD
3.1 – La máquina de inducción
La máquina de inducción o máquina asincrónica es la más utilizada en las aplicaciones
de elevación (grúas y ascensores) debido a las ventajas que ofrecen respecto a las máquinas de
corriente continua o las máquinas sincrónicas. Son máquinas robustas, simples en
construcción y mantenimiento, relativamente económicas y fiables. Su único inconveniente
radica en la dificultad para controlar la velocidad y el par durante la operación, sin embargo el
desarrollo de la electrónica de potencia ha resuelto este problema agregando además
posibilidades de control, supervisión y protección que hacen de esta combinación la opción
más eficaz y eficiente desde hace algún tiempo hasta la actualidad.
3.1.1 - Composición y funcionamiento
De forma constructiva una máquina de inducción está formada a grandes rasgos por un
rotor y un estator (Figura 3.1). El rotor es el elemento móvil que gira con el eje de la máquina,
puede ser tanto en jaula de ardilla como en bobinado de acuerdo a la forma en la que fue
construido. El estator es el elemento fijo y es parte de la estructura o carcasa de la máquina en
el que se encuentran las bobinas inductoras. El principio de funcionamiento consiste en la
circulación de corrientes por las bobinas produciendo flujo, en consecuencia aparece un
campo magnético rotatorio de magnitud constante en el tiempo sobre el rotor. La frecuencia
de las corrientes en el estator define la velocidad de giro del campo. Así se inducen fuerzas
electromotrices que generan corrientes. El par eléctrico es producido como consecuencia de la
interacción entre los campos magnéticos rotatorios de estator y rotor.

16
Una máquina de inducción es normalmente utilizada para operar como motor a pesar
que su construcción permite la operación como generador sin inconvenientes (Figura 3.2). La
razón de esto se debe principalmente a la baja eficiencia que tiene en el régimen de
generación en comparación al régimen de motorización. En muchas aplicaciones sin embargo
se aprovecha el régimen generador particularmente cuando éste no es demasiado frecuente.
Un ejemplo de esto es el frenado regenerativo, que consiste en la inversión del sentido de la
corriente (y por ende del flujo de energía) hacia la red con el fin de garantizar que la máquina
es capaz de detenerse de forma más rápida, ampliamente utilizado en los ascensores y
elevadores.
Figura 3.1 – La máquina de inducción (corte), estator y rotor
Figura 3.2 – Zonas de operación de la máquina de inducción (J. M. Aller, 2008 [2])
17
3.1.2 - Curvas características
Existe una serie de curvas típicas que permiten analizar el comportamiento de las
máquinas de inducción en diferentes regímenes de trabajo, a partir de una deducción
matemática y modelos equivalentes planteados con parámetros calculables. Si bien para el
alcance de éste proyecto no se profundizará en la formulación matemática, sí es parte
importante del estudio analizar el comportamiento.
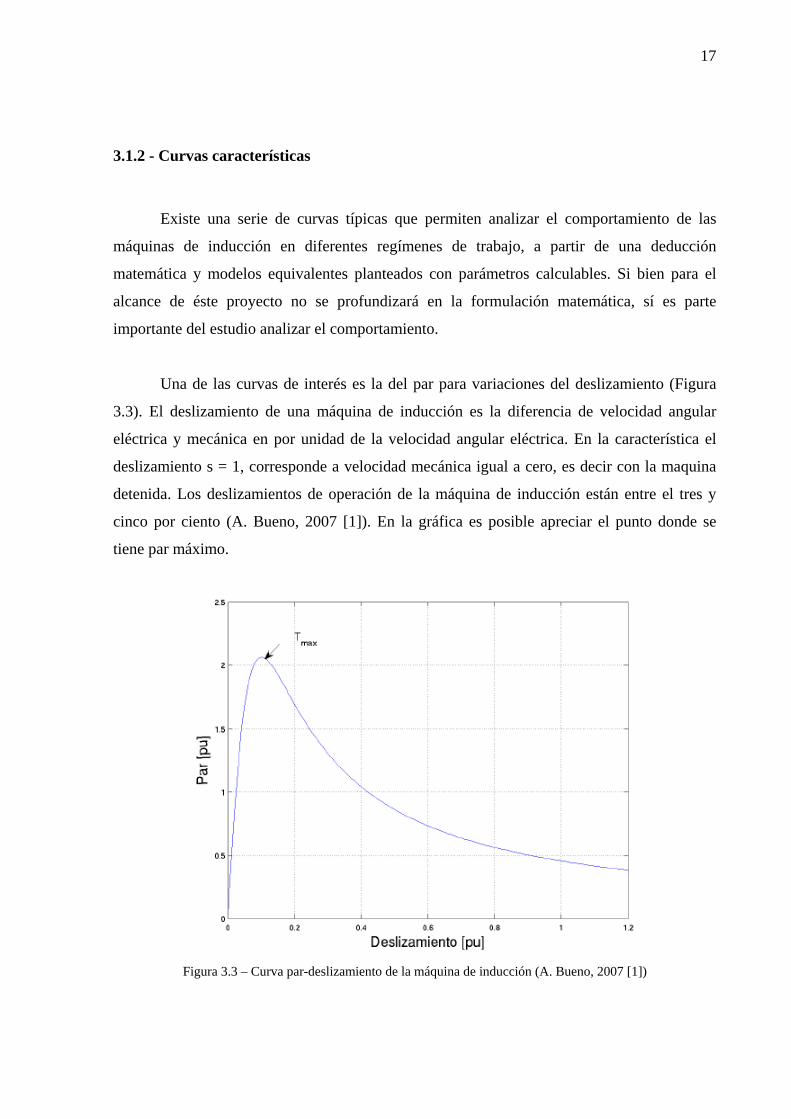
Una de las curvas de interés es la del par para variaciones del deslizamiento (Figura
3.3). El deslizamiento de una máquina de inducción es la diferencia de velocidad angular
eléctrica y mecánica en por unidad de la velocidad angular eléctrica. En la característica el
deslizamiento s = 1, corresponde a velocidad mecánica igual a cero, es decir con la maquina
detenida. Los deslizamientos de operación de la máquina de inducción están entre el tres y
cinco por ciento (A. Bueno, 2007 [1]). En la gráfica es posible apreciar el punto donde se
tiene par máximo.
Figura 3.3 – Curva par-deslizamiento de la máquina de inducción (A. Bueno, 2007 [1])

18
Para comprender el efecto que un controlador puede hacer sobre la máquina de
inducción, resulta interesante observar el efecto de variar algunos parámetros como la tensión
y frecuencia a la alimentación.
Estudiando las variaciones en la tensión de alimentación, se puede observar cómo el
par disminuye con el cuadrado de la tensión aplicada, igualmente ocurre con la potencia en el
eje (Figura 3.4). Asimismo se puede observar cómo la corriente de arranque de la máquina es
proporcional a la tensión aplicada a sus bornes, ésta estrategia de arranque permite reducir las
corrientes durante la energización de la máquina. Un aspecto a considerar al realizar
arranques a tensión reducida es la disminución del par eléctrico suministrado y su repercusión
en el par acelerante (A. Bueno, 2007 [1]).
Figura 3.4 – Par y potencia ante variaciones en la tensión en máquinas de inducción (A. Bueno, 2007 [1])
Al variar la frecuencia en la alimentación de la máquina, se tiene que el par resulta
inversamente proporcional a dicha frecuencia, con un comportamiento no lineal. En cuanto a
la potencia ocurre un comportamiento muy semejante (Figura 3.5). Las corrientes de arranque
sin embargo se elevan a baja frecuencia de manera considerable llegando a más de 12 veces la
nominal, pero su decaimiento es a más baja velocidad debido al cambio de la velocidad
sincrónica con la frecuencia. Al utilizar estas estrategias para el arranque es necesario
considerar los ajustes de las protecciones de corriente del convertidor para permitir estas
corrientes de arranque (A. Bueno, 2007 [1]).
19
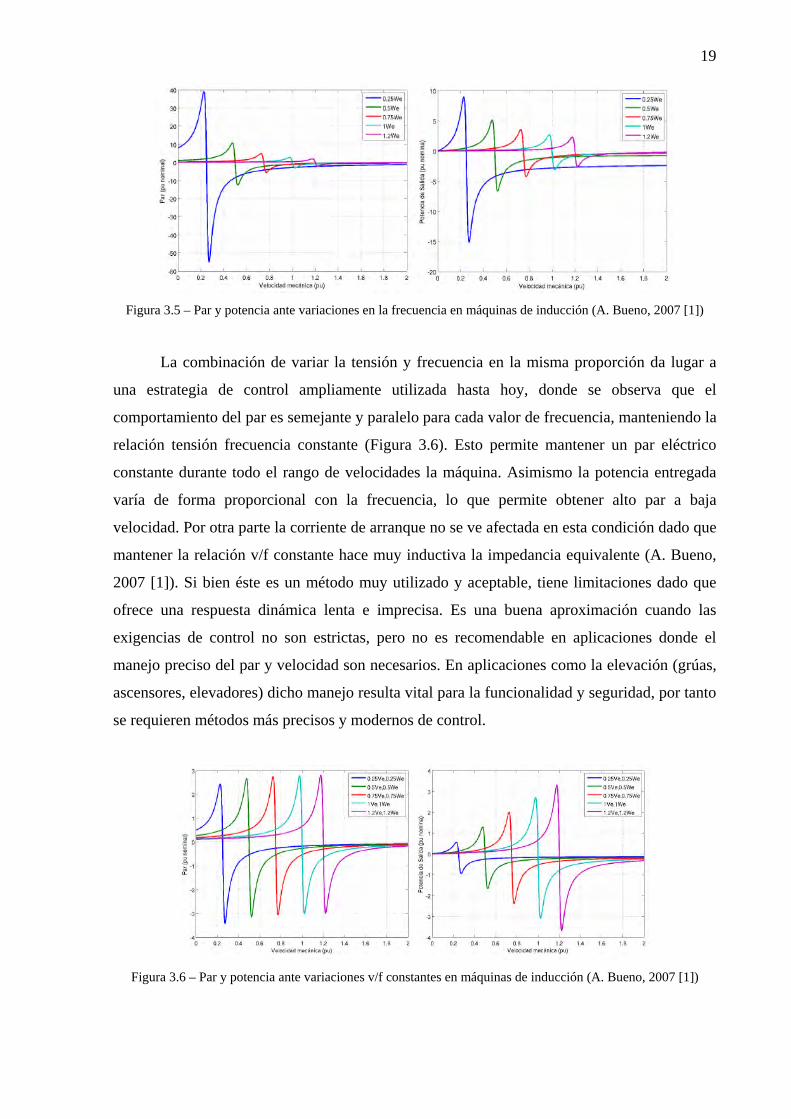
Figura 3.5 – Par y potencia ante variaciones en la frecuencia en máquinas de inducción (A. Bueno, 2007 [1])
La combinación de variar la tensión y frecuencia en la misma proporción da lugar a
una estrategia de control ampliamente utilizada hasta hoy, donde se observa que el
comportamiento del par es semejante y paralelo para cada valor de frecuencia, manteniendo la
relación tensión frecuencia constante (Figura 3.6). Esto permite mantener un par eléctrico
constante durante todo el rango de velocidades la máquina. Asimismo la potencia entregada
varía de forma proporcional con la frecuencia, lo que permite obtener alto par a baja
velocidad. Por otra parte la corriente de arranque no se ve afectada en esta condición dado que
mantener la relación v/f constante hace muy inductiva la impedancia equivalente (A. Bueno,
2007 [1]). Si bien éste es un método muy utilizado y aceptable, tiene limitaciones dado que
ofrece una respuesta dinámica lenta e imprecisa. Es una buena aproximación cuando las
exigencias de control no son estrictas, pero no es recomendable en aplicaciones donde el
manejo preciso del par y velocidad son necesarios. En aplicaciones como la elevación (grúas,
ascensores, elevadores) dicho manejo resulta vital para la funcionalidad y seguridad, por tanto
se requieren métodos más precisos y modernos de control.
Figura 3.6 – Par y potencia ante variaciones v/f constantes en máquinas de inducción (A. Bueno, 2007 [1])
20
Existen otros métodos para controlar la máquina de inducción, algunos por ejemplo
orientados a modificar la resistencia rotórica con el fin de ejercer un control sobre la
velocidad, que resulta particularmente interesante cuando se tiene valores bajos de resistencia
consiguiendo así mejor regulación. Pero el más utilizado en aplicaciones como la elevación es
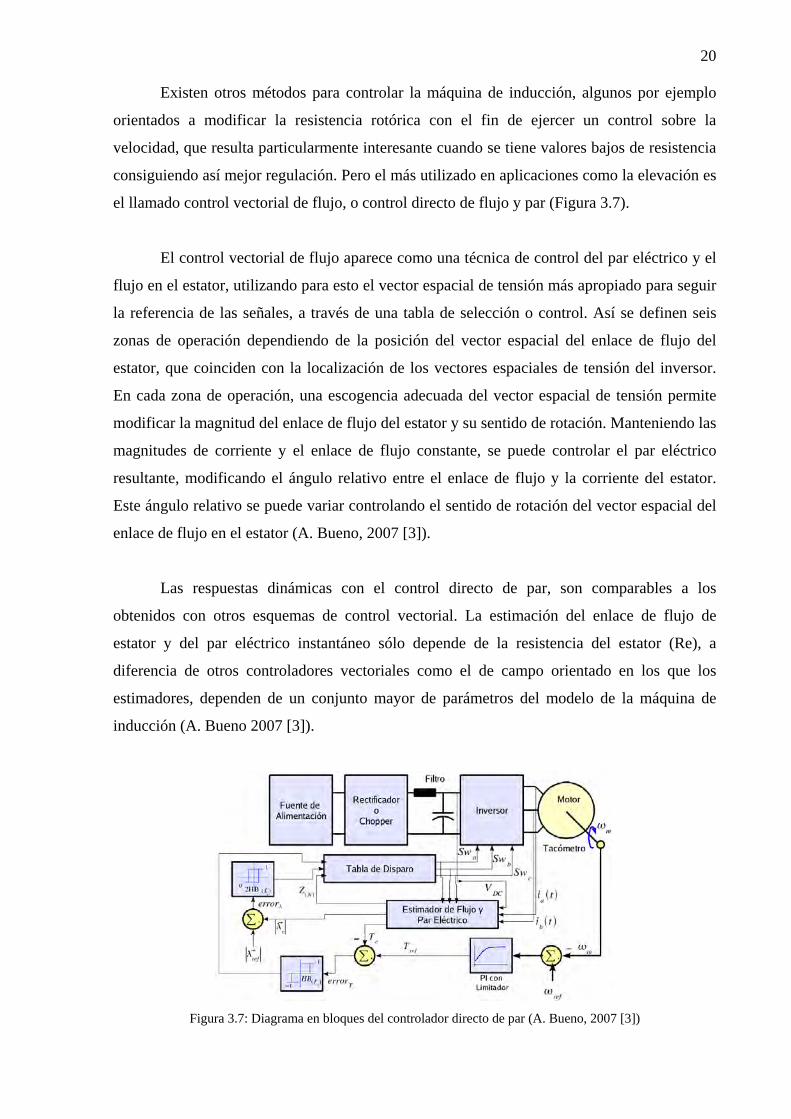
el llamado control vectorial de flujo, o control directo de flujo y par (Figura 3.7).
El control vectorial de flujo aparece como una técnica de control del par eléctrico y el
flujo en el estator, utilizando para esto el vector espacial de tensión más apropiado para seguir
la referencia de las señales, a través de una tabla de selección o control. Así se definen seis
zonas de operación dependiendo de la posición del vector espacial del enlace de flujo del
estator, que coinciden con la localización de los vectores espaciales de tensión del inversor.
En cada zona de operación, una escogencia adecuada del vector espacial de tensión permite
modificar la magnitud del enlace de flujo del estator y su sentido de rotación. Manteniendo las
magnitudes de corriente y el enlace de flujo constante, se puede controlar el par eléctrico
resultante, modificando el ángulo relativo entre el enlace de flujo y la corriente del estator.
Este ángulo relativo se puede variar controlando el sentido de rotación del vector espacial del
enlace de flujo en el estator (A. Bueno, 2007 [3]).
Las respuestas dinámicas con el control directo de par, son comparables a los
obtenidos con otros esquemas de control vectorial. La estimación del enlace de flujo de
estator y del par eléctrico instantáneo sólo depende de la resistencia del estator (Re), a
diferencia de otros controladores vectoriales como el de campo orientado en los que los
estimadores, dependen de un conjunto mayor de parámetros del modelo de la máquina de
inducción (A. Bueno 2007 [3]).
Figura 3.7: Diagrama en bloques del controlador directo de par (A. Bueno, 2007 [3])
21
Así se han visto brevemente las técnicas de control que existen en los distintos equipos
para controlar las máquinas de inducción. Éstos van desde arrancadores suaves y
conmutadores hasta complejos sistemas de electrónica de potencia conocidos como variadores
de velocidad o variadores de frecuencia. Han evolucionado en la medida que la tecnología ha
permitido elementos más eficaces y eficientes para manejar potencias en el control, y
aparecen dispositivos de control digital con mayor poder computacional.
3.3 - Variadores de velocidad
Los variadores de velocidad (VVD ó VSD variable speed drive) son dispositivos
electrónicos, mecánicos, hidráulicos o eléctricos cuya función principal es la de controlar la
velocidad de las máquinas giratorias. Adicionalmente y según el modelo y tecnología pueden
permitir el arranque suave, proporcionar dispositivos de protección, permitir la supervisión de
parámetros en el sistema, entre otras. Se utilizan para manejar bombas, motores de corriente
continua, motores sincrónicos y motores de inducción. Cuando se aplican para el control de
motores de inducción son normalmente conocidos como variadores de frecuencia (VFD
variable frecuency drive).
El motor de corriente alterna a pesar de ser un motor robusto, de poco mantenimiento,
liviano, económico e ideal para la mayoría de las aplicaciones industriales, tiene el
inconveniente de ser un motor rígido en cuanto a su velocidad. La velocidad del motor
asincrónico depende de la forma constructiva del motor y de la frecuencia de alimentación.
Los variadores de velocidad actuales permiten el control a través de la manipulación de las
variables eléctricas de las máquinas, tales como la tensión, frecuencia, y corriente.
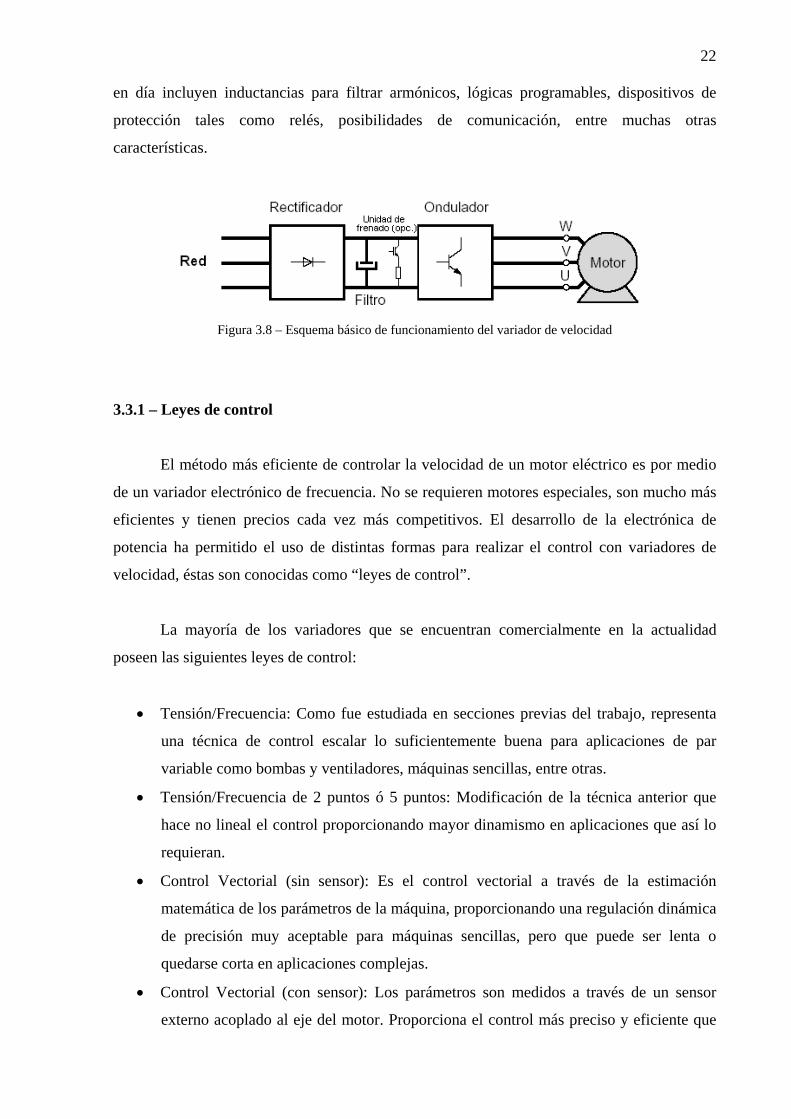
Constructivamente un variador de velocidad está compuesto de forma simplificada (Figura
3.8) por: una etapa de rectificación, donde la corriente alterna proveniente de la alimentación
es transformada en una señal de corriente continua; una etapa de filtrado, donde se adapta la
señal a través de capacitores y otros elementos electrónicos de forma de obtener una corriente
lo más cercana a la deseada; y una etapa de inversión (u ondulación), donde a través de
elementos electrónicos tales como transistores bipolares de compuerta aislada (IGBT) se logra
manipular la señal de salida para conseguir corriente alterna, capaz de alimentar la máquina
con las características apropiadas de control que se desean. Adicionalmente los variadores hoy
22
en día incluyen inductancias para filtrar armónicos, lógicas programables, dispositivos de
protección tales como relés, posibilidades de comunicación, entre muchas otras
características.
Figura 3.8 – Esquema básico de funcionamiento del variador de velocidad
3.3.1 – Leyes de control
El método más eficiente de controlar la velocidad de un motor eléctrico es por medio
de un variador electrónico de frecuencia. No se requieren motores especiales, son mucho más
eficientes y tienen precios cada vez más competitivos. El desarrollo de la electrónica de
potencia ha permitido el uso de distintas formas para realizar el control con variadores de
velocidad, éstas son conocidas como “leyes de control”.
La mayoría de los variadores que se encuentran comercialmente en la actualidad
poseen las siguientes leyes de control:
• Tensión/Frecuencia: Como fue estudiada en secciones previas del trabajo, representa
una técnica de control escalar lo suficientemente buena para aplicaciones de par
variable como bombas y ventiladores, máquinas sencillas, entre otras.
• Tensión/Frecuencia de 2 puntos ó 5 puntos: Modificación de la técnica anterior que
hace no lineal el control proporcionando mayor dinamismo en aplicaciones que así lo
requieran.
• Control Vectorial (sin sensor): Es el control vectorial a través de la estimación
matemática de los parámetros de la máquina, proporcionando una regulación dinámica
de precisión muy aceptable para máquinas sencillas, pero que puede ser lenta o
quedarse corta en aplicaciones complejas.
• Control Vectorial (con sensor): Los parámetros son medidos a través de un sensor
externo acoplado al eje del motor. Proporciona el control más preciso y eficiente que

23
existe en la actualidad, ampliamente recomendado para aplicaciones complejas y de
altos requerimientos.
• Sistema de ahorro de energía: Método de control que aprovecha los ciclos no
constantes ó no balanceados mecánicamente de aplicaciones como pozos petroleros,
para efectuar una regulación que permite el ahorro significativo de energía.
Las múltiples propiedades de los variadores de velocidad serán reforzadas a lo largo
del resto de los capítulos del presente trabajo.
CAPÍTULO 4
LA MAQUETA INDUSTRIAL DE ELEVACIÓN
4.1 - Motivación
En los capítulos anteriores se han visto las ventajas que ofrece el uso de variadores de
velocidad, en el caso particular de la elevación en grúas y ascensores. La intención de la
empresa donde se desarrolló la pasantía era la de diseñar y construir un modelo que permitiera
demostrar que los variadores de velocidad comercializados por ellos resolvían los problemas
presentes en la elevación, y proporcionaban una gran cantidad de ventajas que resultaban en
procesos más eficientes y económicos. Adicionalmente se requería que la maqueta permitiera
su uso para entrenamientos a los operadores y diseñadores de grúas y ascensores.
Del análisis previo del problema se determinó que la mejor forma de demostrar las
ventajas comentadas era con la observación directa del modelo en acción. Por esta razón el
diseño debía ser desarmable y portátil con la intención de llevar la maqueta a los clientes
potenciales.
4.2 - Antecedentes
Existen modelos previos construidos en otros países con la misma finalidad que la
maqueta que se quería desarrollar durante la pasantía. Estos sirvieron de referencia y
permitieron adaptar el diseño original a una solución nacional que cumpliera con todos los
requerimientos del mercado de las grúas y ascensores venezolano.
Hace algunos años en Francia, Schneider Electric contrató a la empresa LEDENT para
la construcción de un modelo de elevación como promoción y entrenamiento del variador
Altivar 58. Éste modelo fue posteriormente adaptado para las versiones siguientes de

25
variadores de velocidad a medida que se lanzaron al mercado Altivar 61 y Altivar 71. En la
actualidad el modelo es conocido con el nombre “LEVAGE” (figura 4.1), está constituido por
una estructura metálica fija al suelo que demuestra la elevación con el variador Altivar 71, y
permite el entrenamiento como parte del programa de mejoramiento profesional de Schneider
Electric. Asimismo existe en la misma instalación de entrenamiento una serie de equipos
didácticos para la demostración de otras aplicaciones tales como el movimiento de traslación
de grúas y cintas transportadoras, el bombeo en estaciones hidráulicas, entre otras.
Figura 4.1 – Modelo de demostración LEVAGE (Francia)
Posteriormente en España y los Estados Unidos el modelo LEVAGE fue construido y
adaptado a los requerimientos de cada mercado. Para el desarrollo de la pasantía se contó con
alguna documentación de la fabricación de éstos que sirvió de referencia en el trabajo
realizado.
4.3 - El mercado venezolano
Parte del estudio que se realizó en la pasantía consistía en analizar la forma en la que
se fabricaban las grúas y ascensores en el país, cómo se aplicaban estos en las industrias, la
existencia o no de variadores de velocidad en los procesos, los posibles inconvenientes
encontrados y sus posibles soluciones. Una primera observación al mercado permitió definir
que las industrias de las grúas y los ascensores se encontraban en situaciones muy distintas.

26
Por un lado se encontró que la fabricación de ascensores (o su ensamblaje como ocurre
en la mayoría de las industrias actuales del país) utilizaban activamente los variadores de
velocidad como solución, no sólo a los problemas descritos con la elevación, sino para la
programación de la lógica de control. Entre las marcas de variadores encontradas se tiene:
ABB, Allen Bradley, Telemecanique (Schneider Electric), Siemens, entre otros. Las empresas
ensambladoras disponían de un variador para cada motor, uno de poca potencia para la
apertura y cierre de puertas, y otro de mayor potencia para la elevación. Además de un PLC o
en algunos casos puntuales una tarjeta de control en los variadores para la lógica de control.
Entre los ensambladores consultados se tiene: OTIS, Schindler, Sabiem, entre otros. La
percepción general de la industria demostraba que el mercado nacional se encontraba
actualizado con las últimas tendencias tecnológicas en ascensores, dentro de las limitaciones
económicas de la inversión en el país.
Por otra parte se estudió el mercado de las grúas, para lo cual se realizó la visita a un
fabricante de grúas nacional llamado IMPSA ubicado en la zona industrial de Palo Negro en
la ciudad de Maracay. La información obtenida en esta oportunidad fue de vital importancia
para definir el diseño de la maqueta. El presidente de la empresa afirmó que eran los únicos
en el ramo que fabricaban todos sus componentes mecánicos en el país. Además aseguró ser
uno de los pocos que utiliza variadores de velocidad en sus grúas. De acuerdo al fabricante
casi todos los movimientos de sus grúas eran controlados por variadores de velocidad
accionando motores de inducción, con un variador Telemecanique Altivar 31 por cada motor
(Figura 4.2), a excepción precisamente del movimiento de elevación. La elevación o
izamiento de cargas en las grúas fabricadas se realiza a través de polipastos de dos
velocidades, dado que afirmó que los variadores no son capaces de garantizar que se
sostienen las cargas elevadas y en consecuencia se producen desplomes de la misma. Caídas
de cargas de hasta 2 toneladas hicieron que se decidiera evitar el uso de los variadores en
estos casos. Una observación general al mercado venezolano de las grúas indicó que se
encuentra muy atrasado tecnológicamente en relación a los mercados internacionales, el uso
de comandos (botonería de mando) analógicos por cable, pocas opciones de control, y falta de
equipamiento de seguridad suponen que la industria debe disponer de mejoras urgentes.

27
Figura 4.2 – Variadores Altivar 31 en montaje de grúa IMPSA
La maqueta diseñada entonces se debía orientar a suplir las carencias de la industria de
las grúas, y enfocarse principalmente en la seguridad para mantener la carga bajo cualquier
condición operativa. Adicionalmente se podía considerar su uso para ascensores
aprovechando que el principio constructivo es exactamente el mismo.
4.4 - Diseño preliminar del modelo a construir
Para proceder al diseño del modelo se realizó un estudio teórico amplio de los
variadores de velocidad, motores de inducción, leyes de control, el variador Altivar 71, entre
otros puntos importantes. Para su construcción se utilizarían las instalaciones del laboratorio
de calidad y servicio en variación de velocidad de la empresa.
Con la información disponible se empezó a definir un diseño de la maqueta industrial
que se quería construir. El modelo debía ser capaz de:
Realizar elevaciones de carga en un recorrido vertical de 2m, por considerarlo una
distancia adecuada para permitir observar los fenómenos de la elevación y la frenada,
así como tener una altura del modelo manejable para su traslado.
En un rango de velocidades controlable desde 0 a 30 m/min (0,5 m/seg), para permitir
la demostración de las elevaciones a alta velocidad (función que será descrita en
secciones posteriores).

28
Con capacidad para elevar pesos entre 0 y 150 Kg según se desee, para garantizar una
diferencia entre el caso sin carga y el de plena carga, sin perder la capacidad de
traslado del modelo.
Con opciones de ajuste y leyes de control
Un peso total sin carga en el modelo menor a los 200 Kg para hacerlo portátil en
medios de transporte convencionales
Las premisas del diseño exigían que éste fuera eficaz, práctico, portátil y seguro.
Para conseguir lo que se quería con el modelo se decidió crear un diseño que
permitiera armar y desarmar la maqueta en cuatro módulos independientes de forma sencilla
(Figura 4.3). Los módulos serían:
a) Módulo motor: Compuesto por el conjunto mecánico que realizaría el
accionamiento y piezas eléctricas que se requiriera ubicar junto a estos.
b) Módulo carga: Compuesto por el peso que se utilizaría como carga durante la
elevación.
c) Módulo variador: Compuesto por el variador de velocidad junto a los
componentes de control y protecciones del modelo.
d) Módulo estructura: Compuesto por el soporte que mantuviera el conjunto
mecánico a la altura deseada para demostrar la elevación.
Figura 4.3 – Los cuatro módulos esenciales de la maqueta a construir
Los componentes y función de cada módulo serán estudiados en secciones posteriores.

29
4.5 – El motorreductor
La maqueta realizaría el movimiento de elevación a través de un motor de inducción,
por ser la máquina utilizada típicamente en las aplicaciones de interés. Además se dispuso de
una tensión de alimentación trifásica en 220VAC por ser un nivel industrial común que
permita la demostración prácticamente en cualquier planta. Se quería aprovechar las
propiedades del variador de velocidad para realizar elevaciones a alta velocidad (hasta 30
m/min.). Adicionalmente se quería una diferencia importante entre los casos a plena carga y
carga mínima, para lo cual se tomó un valor de 150Kg como peso máximo a elevar, por
considerarlo el peso más grande que permitía aún que el modelo pudiera ser trasladable sin
mayores inconvenientes. Se decidió utilizar un conjunto de pesas de gimnasio de 25 Kg cada
una como carga, permitiendo así cambiar la carga en cualquier momento que se deseara
variando el número de pesas sujetas por el modelo. Por los requerimientos de par (se verá el
cálculo a continuación) y velocidad que se tenían se decidió utilizar un reductor mecánico
acoplado al eje del motor, de forma de poder utilizar un motor de inducción disponible
comercialmente y aún así respetar los requerimientos de par y velocidad establecidos.
Considerando las piezas básicas presentes (Figura 4.4) es posible dimensionar los
componentes de interés. Estimando una masa de 5Kg al soporte de la carga a elevar, la masa
total que debía levantar el conjunto motor-reductor era de 155Kg. La velocidad lineal de
elevación era de 30m/min (peor caso o máxima velocidad requerida) que equivale a 0,5m/seg.
Figura 4.4 – Diagrama mecánico básico
30
m = 155 Kg v = 0,5 m/s g = 9,81 m/s2 (4.1)
F = m.g => F = 155.9,81 = 1520,55 N.m (4.2)
P = m.g.v = 1520,55.0,5 = 0,76 kW (4.3)
Se debía disponer de una polea para transmitir el movimiento del motorreductor a la
carga. Mientras más grande se tuviera el radio en la polea, menos velocidad se requeriría en el
motor al levantar el peso calculado.
Los motorreductores sin embargo no son fabricados en el país (solo existen algunas
ensambladoras), razón por la cual se debían solicitar como productos de importación. Debido
a los trámites necesarios con CADIVI los tiempos de importación eran de incluso 3 meses en
todos los proveedores consultados, resultando en la pérdida de mucho tiempo de la pasantía
(se disponía de 20 semanas para desarrollar todo el proyecto). De igual forma los variadores
de velocidad vendidos por la empresa son productos contra pedido que tardan en llegar al país
entre 2 y 3 meses. Afortunadamente se logró conseguir un motor de 2HP (1,5kW) disponible
en el país para entrega relativamente rápida en el proveedor SEW-Eurodrive de la ciudad de
Valencia, el cual era posible pedir con una amplia gama de reductores. Asimismo se encontró
un variador de velocidad en uno de los canales de ventas de Schneider Electric en Caracas que
coincidía con el valor de potencia de 2HP, disponible para la entrega inmediata. Dado que el
valor de potencia conseguida era mayor al calculado inicialmente, la velocidad del
movimiento también sería mayor, por tanto se debía aprovechar la relación del reductor y el
radio de la polea para reducir la velocidad nuevamente al valor deseado.
Así se tenía la potencia del motor 1,5kW. Despreciando las pérdidas en el acople con
el reductor se puede asumir que la potencia del reductor es también de 1,5kW. De las
relaciones disponibles de reductores que cumplían los requerimientos se tomó la de 18,6:1, de
esta forma se pudo calcular el diámetro de la polea necesaria.
Motor: 1,5 kW 1710 rpm
Reductor:
ω = 1710 / 18,6 = 91,94 rpm = 9,65 rad/s (velocidad a la salida) (4.4)
T = P / ω = 1500 / 9,65 = 155,5 N.m (par máximo de salida) (4.5)

31
Polea:
v = ω.radio => radio = 0,5 / 9,65 = 0,052 m => diámetro = 10,4 cm (4.6)
El modelo definitivo de motorreductor que cumple con todas las características
descritas es el: SEW Eurodrive R57DT90L4/BMG (Figura 4.5). Éste incorpora un freno
mecánico de disco cuya justificación será explicada más adelante.
Figura 4.5 – Motorreductor SEW Eurodrive utilizado en el proyecto
4.6 - Variador de velocidad Telemecanique Altivar 71
La empresa Schneider Electric ofrece una gama de modelos de variadores de
velocidad para motores de inducción. Existe además una gama para el caso de los motores de
corriente continua, pero ésta no es comercializada en Venezuela debido a su poca frecuencia
de pedidos que la hacen poco rentable.
De los catálogos de selección es posible decidir el modelo que mejor se adapta a las
condiciones particulares de la aplicación que se tiene. La selección se realiza en un primer
nivel escogiendo la familia de variadores que mejor se adapta a la carga que se quiere
accionar. Así por ejemplo para el caso de bombas y ventiladores, que suponen cargas de par
variable y proporcional con el cuadrado de la velocidad, se recomienda los variadores Altivar
61 (ATV61); para el caso de grúas, ascensores y cintas transportadoras con máquinas
complejas, que suponen cargas de par constante directamente proporcional a la velocidad, así
como requerimientos de alto par a bajas velocidades, se recomienda los variadores Altivar 71
(ATV71) (Figura 4.6); para el caso de máquinas sencillas con cargas de par constante se

32
recomienda los variadores Altivar 31 (ATV31); adicionalmente se cuenta con familias para
otras aplicaciones particulares. De éste primer nivel de selección ya se puede observar que el
modelo de variadores que se utiliza en la industria de las grúas venezolanas para la elevación
antes comentado (ATV31) está mal seleccionado, pues la elevación es una aplicación
compleja que requiere características técnicas que sólo el Altivar 71 (ATV71) puede brindar.
Esto indica que la falta de información y correcto asesoramiento de los productos es un punto
importante a considerar. La maqueta puede permitir que este factor se corrija.
En un segundo nivel de selección, ya con la familia de variadores definida, es posible
establecer el modelo específico que mejor conviene. Para esto se cuenta con tablas donde el
nivel de tensión de alimentación, potencia nominal del accionamiento, accesorios de
supervisión, control, protección y seguridad, define el código exacto o referencia del variador
recomendado.
Para la maqueta diseñada se utilizó el modelo ATV71HU15M3, con las siguientes
características:
Figura 4.6 – Variador de Velocidad Altivar 71
Fabricante: Telemecanique (Schneider Electric)
Modelo: ATV71HU15M3
Potencia nominal: 2HP (1,5kW)
Tensión de alimentación: 200/240VAC
Consola gráfica LCD desmontable incorporada
Rango de frecuencia de salida de 1 a 1600 Hz. Admite el control en las siguientes
formas: control vectorial de flujo con o sin sensor, ley tensión/frecuencia de 2 ó 5 puntos,
sistema de ahorro de energía ENA. Sobrepar transitorio permitido de 220% del par nominal
del motor durante 2 segundos, y 170% del par nominal del motor durante 60 segundos. Más
33
de 150 funciones, 16 velocidades preseleccionadas, 2 entradas analógicas, 6 entradas lógicas,
1 salida analógica, 2 salidas de relé. Comunicación integrada para redes Modbus y CANopen.
Capacidad de expansión con tarjetas opcionales para comunicación, extensión de entradas y
salidas, control y programación, interfaz con sensores de velocidad de giro o encoders.
4.7 – Módulo motor
Una vez dimensionado el motorreductor se pudo observar, al analizar los esfuerzos
mecánicos sobre la polea y el mismo motorreductor, que era necesario distribuir la carga de
forma de no apoyarla completamente sobre el eje del reductor. Por esta razón se decidió
utilizar una chumacera o elemento rodante que serviría de apoyo al extremo opuesto de la
polea compartiendo así el peso, en este caso particular se trata de una chumacera tipo puente
(Figura 4.7).
Figura 4.7 – Chumacera tipo puente, eje 35mm
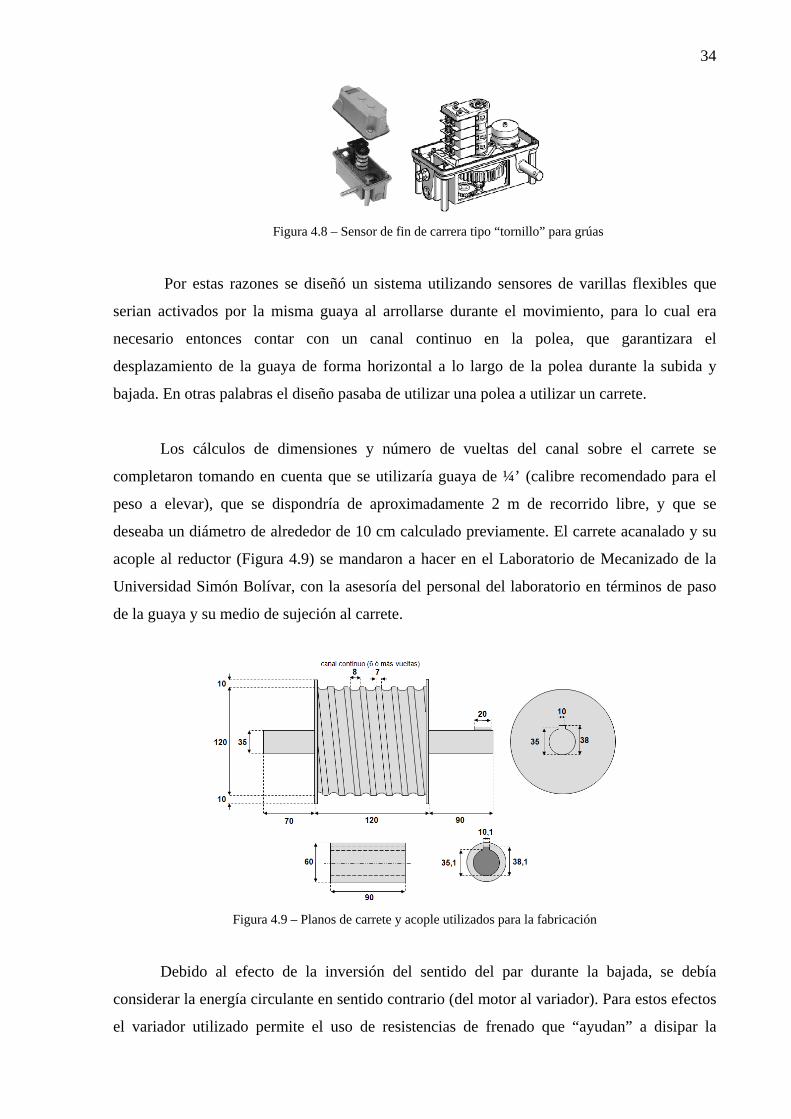
Asimismo se quería asegurar que el camino de subida y bajada contara con límites de
seguridad, para que la carga a elevar no impactara contra la polea (al mantener un comando de
subida) o contra el suelo (al mantener un comando de bajada). Para esto era necesario contar
con sensores de fin de carrera. De la investigación de sensores disponibles se determinó que el
apropiado para aplicaciones de este tipo era el sensor tipo tornillo (Figura 4.8), que consiste
de un eje acoplable al reductor con una serie de engranajes que activan o desactivan contactos
secos según la configuración que se establezca. Sin embargo su costo salía del presupuesto
estimado, y la disponibilidad del producto se tenía en el mejor de los casos para llegar al país
en 4 meses por ser producto contra pedido de muy baja rotación.
34
Figura 4.8 – Sensor de fin de carrera tipo “tornillo” para grúas
Por estas razones se diseñó un sistema utilizando sensores de varillas flexibles que
serian activados por la misma guaya al arrollarse durante el movimiento, para lo cual era
necesario entonces contar con un canal continuo en la polea, que garantizara el
desplazamiento de la guaya de forma horizontal a lo largo de la polea durante la subida y
bajada. En otras palabras el diseño pasaba de utilizar una polea a utilizar un carrete.
Los cálculos de dimensiones y número de vueltas del canal sobre el carrete se
completaron tomando en cuenta que se utilizaría guaya de ¼’ (calibre recomendado para el
peso a elevar), que se dispondría de aproximadamente 2 m de recorrido libre, y que se
deseaba un diámetro de alrededor de 10 cm calculado previamente. El carrete acanalado y su
acople al reductor (Figura 4.9) se mandaron a hacer en el Laboratorio de Mecanizado de la
Universidad Simón Bolívar, con la asesoría del personal del laboratorio en términos de paso
de la guaya y su medio de sujeción al carrete.
Figura 4.9 – Planos de carrete y acople utilizados para la fabricación
Debido al efecto de la inversión del sentido del par durante la bajada, se debía
considerar la energía circulante en sentido contrario (del motor al variador). Para estos efectos
el variador utilizado permite el uso de resistencias de frenado que “ayudan” a disipar la
35
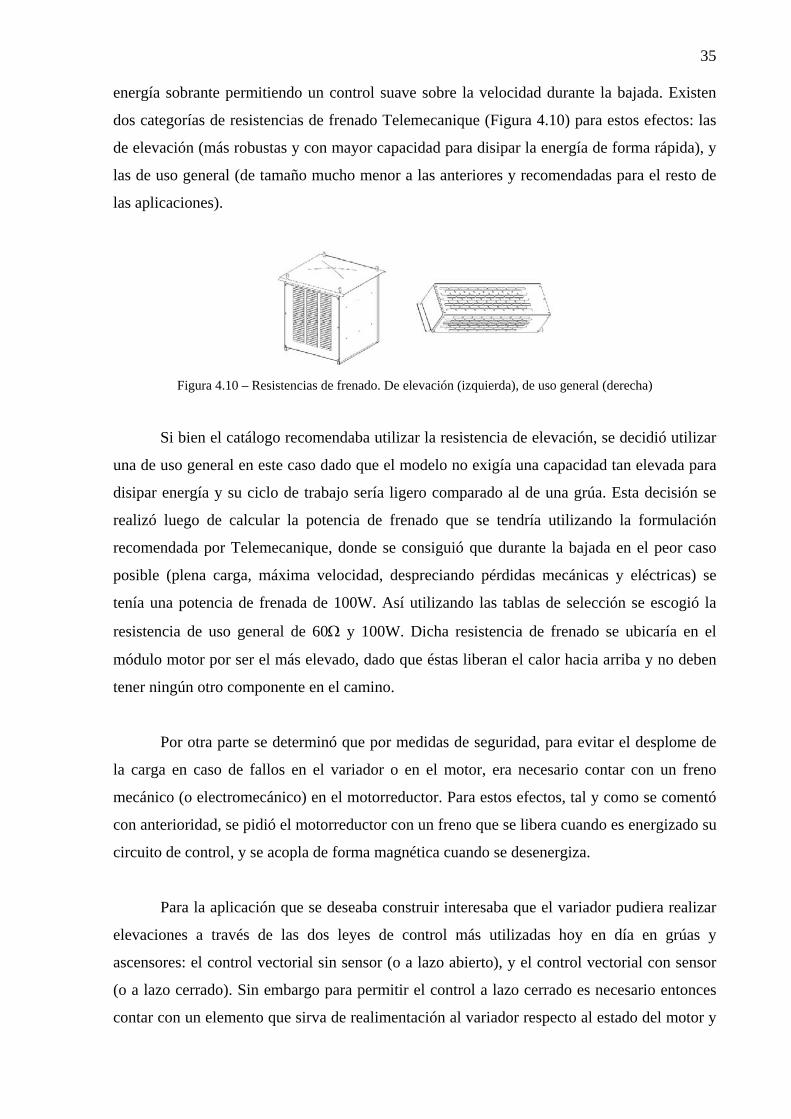
energía sobrante permitiendo un control suave sobre la velocidad durante la bajada. Existen
dos categorías de resistencias de frenado Telemecanique (Figura 4.10) para estos efectos: las
de elevación (más robustas y con mayor capacidad para disipar la energía de forma rápida), y
las de uso general (de tamaño mucho menor a las anteriores y recomendadas para el resto de
las aplicaciones).
Figura 4.10 – Resistencias de frenado. De elevación (izquierda), de uso general (derecha)
Si bien el catálogo recomendaba utilizar la resistencia de elevación, se decidió utilizar
una de uso general en este caso dado que el modelo no exigía una capacidad tan elevada para
disipar energía y su ciclo de trabajo sería ligero comparado al de una grúa. Esta decisión se
realizó luego de calcular la potencia de frenado que se tendría utilizando la formulación
recomendada por Telemecanique, donde se consiguió que durante la bajada en el peor caso
posible (plena carga, máxima velocidad, despreciando pérdidas mecánicas y eléctricas) se
tenía una potencia de frenada de 100W. Así utilizando las tablas de selección se escogió la
resistencia de uso general de 60Ω y 100W. Dicha resistencia de frenado se ubicaría en el
módulo motor por ser el más elevado, dado que éstas liberan el calor hacia arriba y no deben
tener ningún otro componente en el camino.
Por otra parte se determinó que por medidas de seguridad, para evitar el desplome de
la carga en caso de fallos en el variador o en el motor, era necesario contar con un freno
mecánico (o electromecánico) en el motorreductor. Para estos efectos, tal y como se comentó
con anterioridad, se pidió el motorreductor con un freno que se libera cuando es energizado su
circuito de control, y se acopla de forma magnética cuando se desenergiza.
Para la aplicación que se deseaba construir interesaba que el variador pudiera realizar
elevaciones a través de las dos leyes de control más utilizadas hoy en día en grúas y
ascensores: el control vectorial sin sensor (o a lazo abierto), y el control vectorial con sensor
(o a lazo cerrado). Sin embargo para permitir el control a lazo cerrado es necesario entonces
contar con un elemento que sirva de realimentación al variador respecto al estado del motor y
36
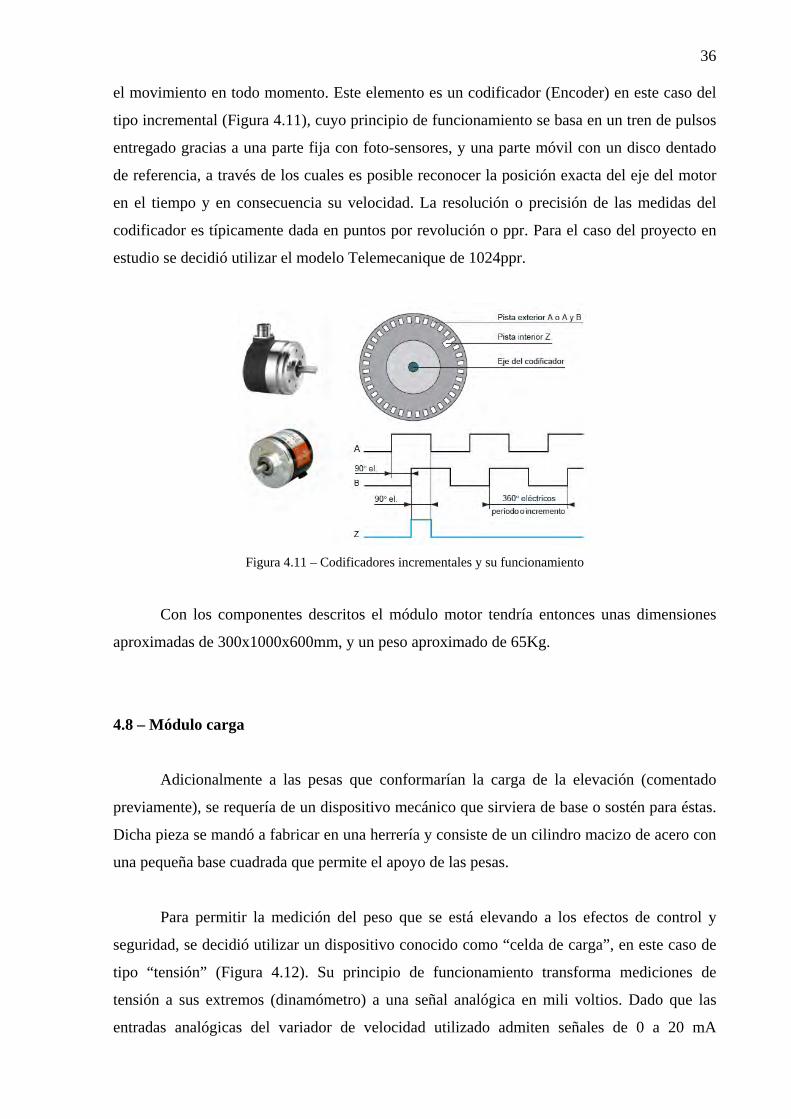
el movimiento en todo momento. Este elemento es un codificador (Encoder) en este caso del
tipo incremental (Figura 4.11), cuyo principio de funcionamiento se basa en un tren de pulsos
entregado gracias a una parte fija con foto-sensores, y una parte móvil con un disco dentado
de referencia, a través de los cuales es posible reconocer la posición exacta del eje del motor
en el tiempo y en consecuencia su velocidad. La resolución o precisión de las medidas del
codificador es típicamente dada en puntos por revolución o ppr. Para el caso del proyecto en
estudio se decidió utilizar el modelo Telemecanique de 1024ppr.
Figura 4.11 – Codificadores incrementales y su funcionamiento
Con los componentes descritos el módulo motor tendría entonces unas dimensiones
aproximadas de 300x1000x600mm, y un peso aproximado de 65Kg.
4.8 – Módulo carga
Adicionalmente a las pesas que conformarían la carga de la elevación (comentado
previamente), se requería de un dispositivo mecánico que sirviera de base o sostén para éstas.
Dicha pieza se mandó a fabricar en una herrería y consiste de un cilindro macizo de acero con
una pequeña base cuadrada que permite el apoyo de las pesas.
Para permitir la medición del peso que se está elevando a los efectos de control y
seguridad, se decidió utilizar un dispositivo conocido como “celda de carga”, en este caso de
tipo “tensión” (Figura 4.12). Su principio de funcionamiento transforma mediciones de
tensión a sus extremos (dinamómetro) a una señal analógica en mili voltios. Dado que las
entradas analógicas del variador de velocidad utilizado admiten señales de 0 a 20 mA

37
(corriente) ó 0 a 10 V (tensión), era necesario entonces contar con un accesorio adicional para
convertir la señal de la celda de carga, disponible también en el mismo fabricante.
Figura 4.12 – Celda de carga, tipo tensión
Para completar el módulo de carga se utilizaron accesorios para guayas tales como
“perros” de sujeción y el gancho. Con todo esto las dimensiones aproximadas serían de
300x400x400mm, y el peso aproximado de 155Kg.
4.9 – Módulo variador
El siguiente módulo del diseño consistía de un gabinete donde se ubicarían los
compontes de protección, control, y el cableado en general. Para estos efectos se decidió
utilizar un gabinete de compuesto de poliéster de la marca Himel (Figura 4.13). El estudio
teórico previo del variador de velocidad permitió determinar la forma apropiada de disponer
el control, protecciones y diálogos hombre-máquina del modelo.
Figura 4.13 – Gabinete de compuesto de poliéster utilizado para control y protecciones
4.9.1 – Esquema de potencia
Los catálogos del variador de velocidad sugieren la forma de conectar la potencia y el
motor de forma segura y cumpliendo los estándares internacionales IEC, a través de dos lazos
de control con contactores (KM1 y KM2) para garantizar la conexión y desconexión del

38
equipo y el freno, así como un guarda-motor o disyuntor para proteger al variador de
velocidad ante corto circuitos (Q1). Adicionalmente el ATV71 incluye internamente una
protección ante sobre cargas del motor y del mismo variador.
Los variadores ATV71 disponen de dos relés que en elevación son normalmente
utilizados como sigue: El primero (R1) como contacto de gestión de fallos, permitiendo la
desenergización del equipo ante la detección de una falla en el motor, la alimentación, o el
mismo variador; y un segundo relé (R2) como contacto de control del freno, permitiendo la
gestión de la frenada por el variador de velocidad de forma de garantizar un movimiento
fluido y seguro durante todo el recorrido. Se decidió además hacer algunas modificaciones
adaptando el diseño al motorreductor utilizado, así se agregó un interruptor termo-magnético
para proteger el freno del motor (ITM2), y un interruptor termo-magnético principal para
proteger el cableado y el modelo en general (ITM1).
La coordinación de las protecciones: interruptor principal (ITM1), guarda-motor o
disyuntor del variador de velocidad (Q1), e interruptor del freno (ITM2); fue realizada
utilizando el software EcoDial© de Schneider Electric y sus resultados verificados de forma
manual apoyándose en las curvas de los catálogos de cada elemento.
Adicionalmente se agregó al esquema de conexiones de potencia un pulsador para
paradas de emergencia (S3), pulsadores de encendido (S1) y apagado (S2) (energización y
desenergización del variador de velocidad), y un relé externo (R3) para supervisar el correcto
funcionamiento del freno de forma de indicar al variador si la orden de acople o desacople se
realizó correctamente.
El esquema de potencia completo puede observarse a continuación (Figura 4.14).

39
Figura 4.14 – Esquema de conexión de potencia utilizado
4.9.2 – Esquema de control
En cuanto al control y mando de la maqueta se utilizó como base una vez más la
disposición recomendada por Telemecanique para aplicaciones de elevación. Así se utilizó un
manipulador de dos direcciones y dos contactos por dirección, para permitir tener dos
velocidades tanto en la subida como en la bajada. Una primera velocidad llamada velocidad
de referencia que sería dispuesta a través de un potenciómetro, permitiendo al operador
modificarla a voluntad según lo que requiera el movimiento que va a realizar. Además se
contaría con una segunda velocidad llamada máxima velocidad, que permitiera configurar
previamente en el variador su valor y así conseguir un movimiento rápido y seguro cuando
sea necesario, por ejemplo para los movimientos con poca carga o sin carga.
Adicionalmente era necesario disponer de un selector que permitiera apoyar la carga
en el suelo (S4) cuando así lo requiriera el movimiento que se está realizando, por ejemplo en
una grúa cuando se quiere dejar reposar la carga en su lugar de destino, o durante la misma
demostración de la maqueta cuando se quisiera cambiar el número de pesas que se está
elevando. La razón de esto se debe a que se tiene sensores de fin de carrera, con lo cual la
carga es automáticamente detenida por el variador a una distancia segura del suelo (donde se
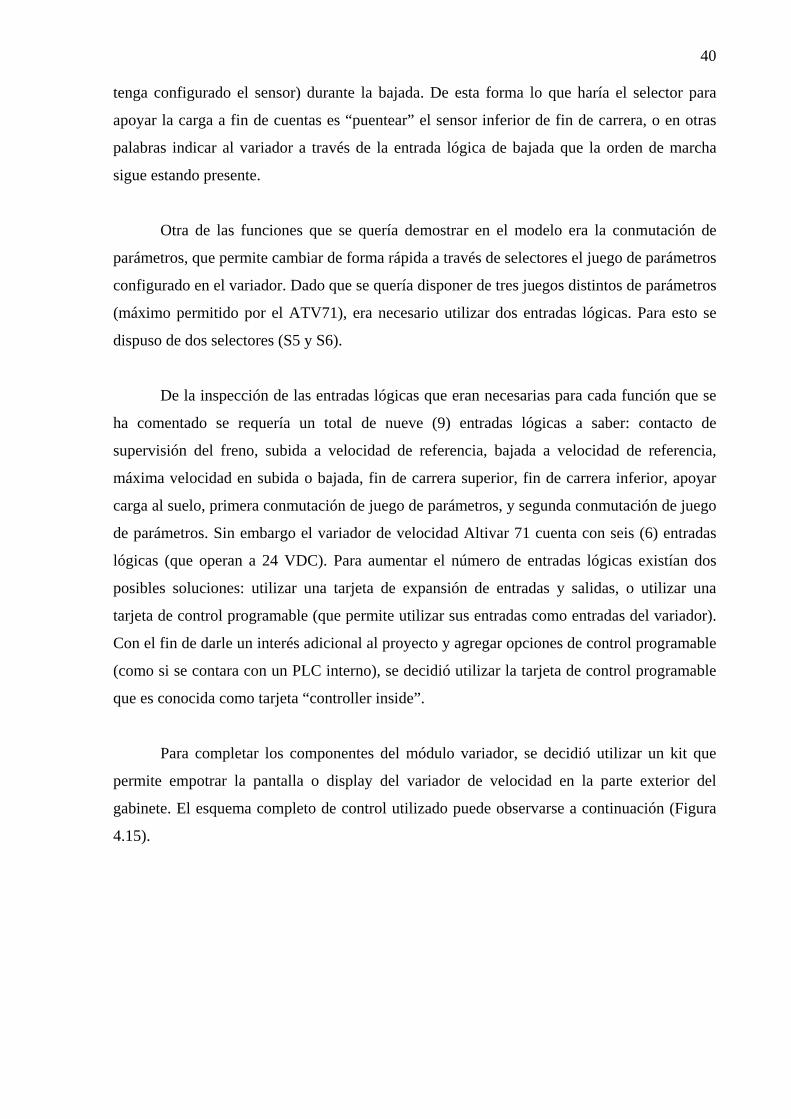
40
tenga configurado el sensor) durante la bajada. De esta forma lo que haría el selector para
apoyar la carga a fin de cuentas es “puentear” el sensor inferior de fin de carrera, o en otras
palabras indicar al variador a través de la entrada lógica de bajada que la orden de marcha
sigue estando presente.
Otra de las funciones que se quería demostrar en el modelo era la conmutación de
parámetros, que permite cambiar de forma rápida a través de selectores el juego de parámetros
configurado en el variador. Dado que se quería disponer de tres juegos distintos de parámetros
(máximo permitido por el ATV71), era necesario utilizar dos entradas lógicas. Para esto se
dispuso de dos selectores (S5 y S6).
De la inspección de las entradas lógicas que eran necesarias para cada función que se
ha comentado se requería un total de nueve (9) entradas lógicas a saber: contacto de
supervisión del freno, subida a velocidad de referencia, bajada a velocidad de referencia,
máxima velocidad en subida o bajada, fin de carrera superior, fin de carrera inferior, apoyar
carga al suelo, primera conmutación de juego de parámetros, y segunda conmutación de juego
de parámetros. Sin embargo el variador de velocidad Altivar 71 cuenta con seis (6) entradas
lógicas (que operan a 24 VDC). Para aumentar el número de entradas lógicas existían dos
posibles soluciones: utilizar una tarjeta de expansión de entradas y salidas, o utilizar una
tarjeta de control programable (que permite utilizar sus entradas como entradas del variador).
Con el fin de darle un interés adicional al proyecto y agregar opciones de control programable
(como si se contara con un PLC interno), se decidió utilizar la tarjeta de control programable
que es conocida como tarjeta “controller inside”.
Para completar los componentes del módulo variador, se decidió utilizar un kit que
permite empotrar la pantalla o display del variador de velocidad en la parte exterior del
gabinete. El esquema completo de control utilizado puede observarse a continuación (Figura
4.15).
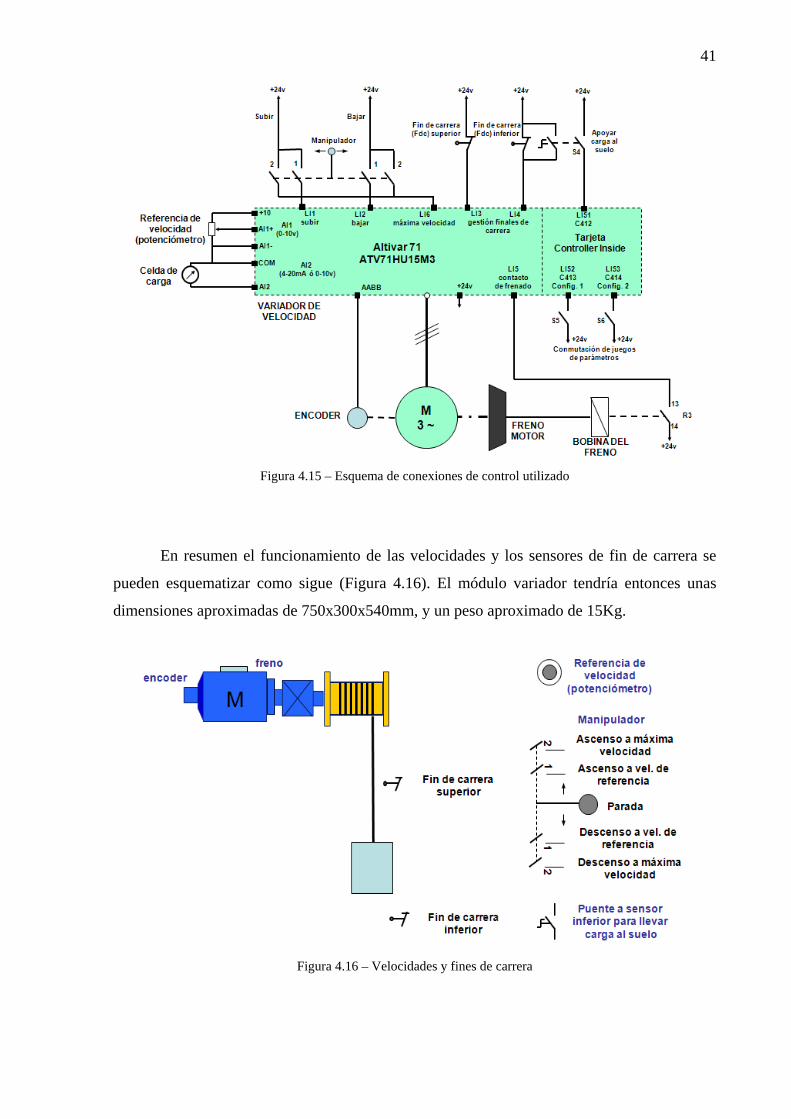
41
Figura 4.15 – Esquema de conexiones de control utilizado
En resumen el funcionamiento de las velocidades y los sensores de fin de carrera se
pueden esquematizar como sigue (Figura 4.16). El módulo variador tendría entonces unas
dimensiones aproximadas de 750x300x540mm, y un peso aproximado de 15Kg.
Figura 4.16 – Velocidades y fines de carrera
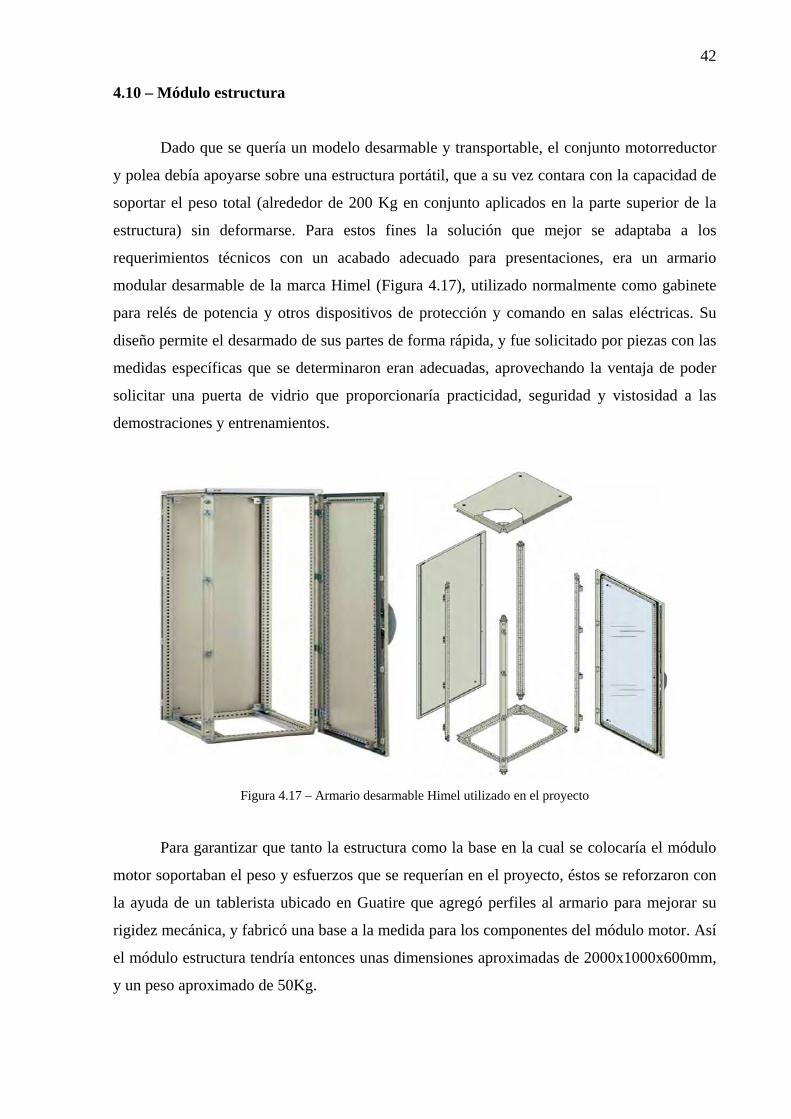
42
4.10 – Módulo estructura
Dado que se quería un modelo desarmable y transportable, el conjunto motorreductor
y polea debía apoyarse sobre una estructura portátil, que a su vez contara con la capacidad de
soportar el peso total (alrededor de 200 Kg en conjunto aplicados en la parte superior de la
estructura) sin deformarse. Para estos fines la solución que mejor se adaptaba a los
requerimientos técnicos con un acabado adecuado para presentaciones, era un armario
modular desarmable de la marca Himel (Figura 4.17), utilizado normalmente como gabinete
para relés de potencia y otros dispositivos de protección y comando en salas eléctricas. Su
diseño permite el desarmado de sus partes de forma rápida, y fue solicitado por piezas con las
medidas específicas que se determinaron eran adecuadas, aprovechando la ventaja de poder
solicitar una puerta de vidrio que proporcionaría practicidad, seguridad y vistosidad a las
demostraciones y entrenamientos.
Figura 4.17 – Armario desarmable Himel utilizado en el proyecto
Para garantizar que tanto la estructura como la base en la cual se colocaría el módulo
motor soportaban el peso y esfuerzos que se requerían en el proyecto, éstos se reforzaron con
la ayuda de un tablerista ubicado en Guatire que agregó perfiles al armario para mejorar su
rigidez mecánica, y fabricó una base a la medida para los componentes del módulo motor. Así
el módulo estructura tendría entonces unas dimensiones aproximadas de 2000x1000x600mm,
y un peso aproximado de 50Kg.
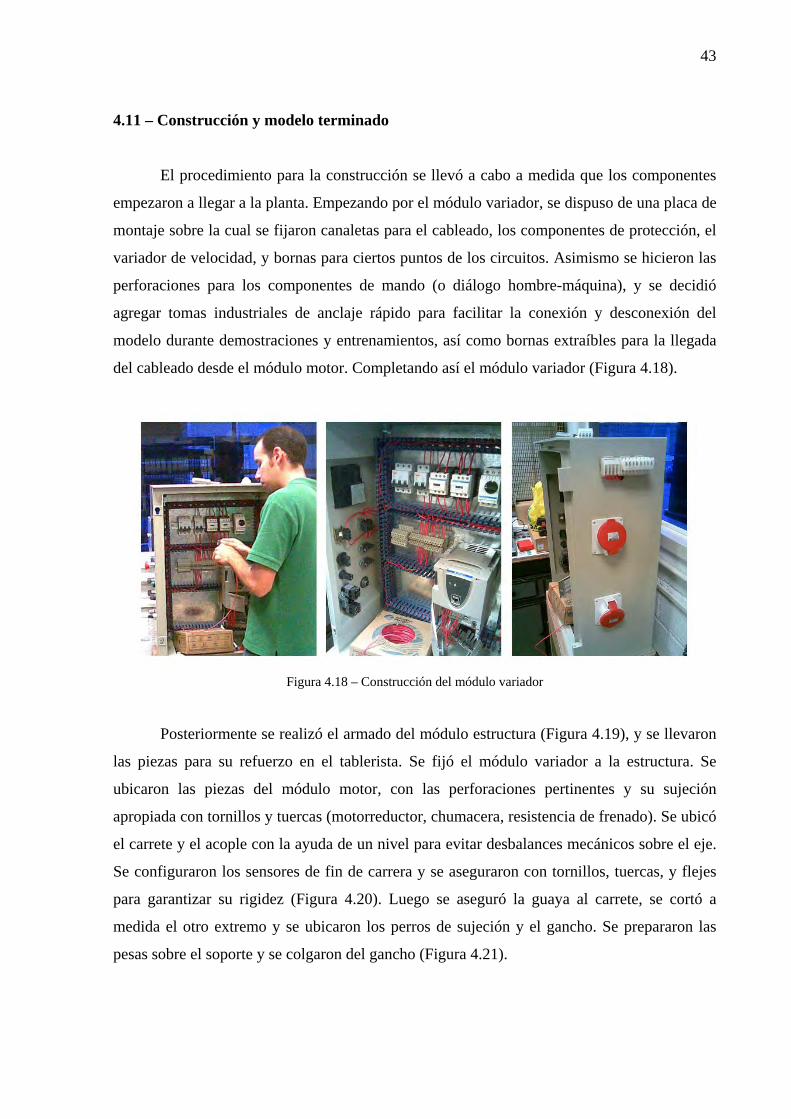
43
4.11 – Construcción y modelo terminado
El procedimiento para la construcción se llevó a cabo a medida que los componentes
empezaron a llegar a la planta. Empezando por el módulo variador, se dispuso de una placa de
montaje sobre la cual se fijaron canaletas para el cableado, los componentes de protección, el
variador de velocidad, y bornas para ciertos puntos de los circuitos. Asimismo se hicieron las
perforaciones para los componentes de mando (o diálogo hombre-máquina), y se decidió
agregar tomas industriales de anclaje rápido para facilitar la conexión y desconexión del
modelo durante demostraciones y entrenamientos, así como bornas extraíbles para la llegada
del cableado desde el módulo motor. Completando así el módulo variador (Figura 4.18).
Figura 4.18 – Construcción del módulo variador
Posteriormente se realizó el armado del módulo estructura (Figura 4.19), y se llevaron
las piezas para su refuerzo en el tablerista. Se fijó el módulo variador a la estructura. Se
ubicaron las piezas del módulo motor, con las perforaciones pertinentes y su sujeción
apropiada con tornillos y tuercas (motorreductor, chumacera, resistencia de frenado). Se ubicó
el carrete y el acople con la ayuda de un nivel para evitar desbalances mecánicos sobre el eje.
Se configuraron los sensores de fin de carrera y se aseguraron con tornillos, tuercas, y flejes
para garantizar su rigidez (Figura 4.20). Luego se aseguró la guaya al carrete, se cortó a
medida el otro extremo y se ubicaron los perros de sujeción y el gancho. Se prepararon las
pesas sobre el soporte y se colgaron del gancho (Figura 4.21).
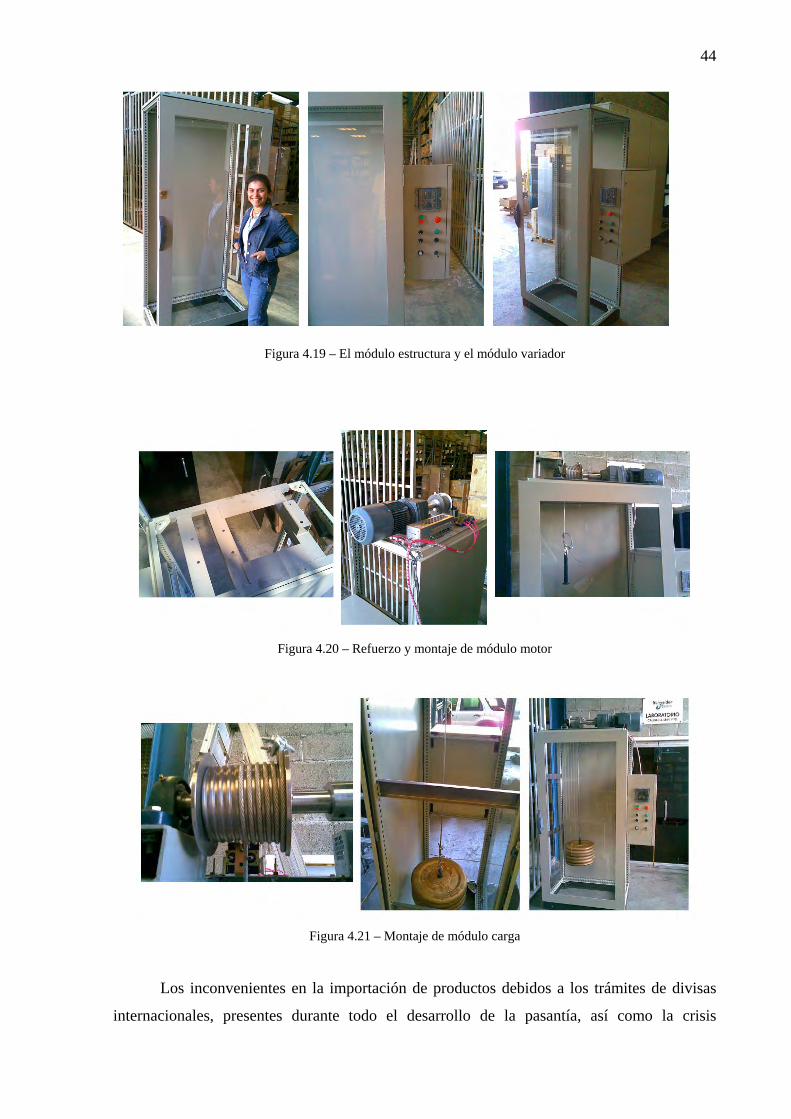
44
Figura 4.19 – El módulo estructura y el módulo variador
Figura 4.20 – Refuerzo y montaje de módulo motor
Figura 4.21 – Montaje de módulo carga
Los inconvenientes en la importación de productos debidos a los trámites de divisas
internacionales, presentes durante todo el desarrollo de la pasantía, así como la crisis

45
financiera, hicieron que muchos productos se demoraran en llegar. Por estas razones el tiempo
de llegada de dos componentes: el codificador y la celda de carga quedaron para principios
del año 2009 (el periodo de pasantía culminaba en Diciembre de 2008). Así se decidió
culminar el proyecto sin estos componentes, pero dejando el cableado listo para su llegada y
posterior montaje por parte de la empresa.
Ya con la construcción del modelo terminada (Figura 4.22), se preparó una extensión
de 8 metros para llevar la alimentación al modelo, y se revisaron las conexiones en frío.
Luego se verificó que no existieran cortocircuitos con la ayuda de un multímetro. Así se
procedió a la primera energización de los componentes paso a paso, para lo cual se utilizó un
banco industrial de pruebas que proporcionaba la tensión requerida con todas las
consideraciones pertinentes de seguridad (Figura 4.23). Finalmente se configuró el variador
de velocidad para las funciones que se quería demostrar. Con lo cual se podía empezar el
proceso de pruebas.
Figura 4.22 – Maqueta industrial de elevación

46
Figura 4.23 – Pantalla ATV71, conexiones, y banco de prueba
4.12 – Funciones utilizadas
A lo largo del desarrollo del trabajo, se ha comentado brevemente las funciones que se
utilizarían en el variador de velocidad para este proyecto en particular. Sin embargo en esta
sección se tratarán de definir a manera de resumen para reforzar la idea de las capacidades del
modelo construido.
• Lógica de frenado: Consiste en la gestión del arranque y parada a través del variador
de velocidad. Su utilidad radica en la posibilidad de hacer arranques y paradas seguros y
eficientes, permitir entregar el par necesario según la etapa del movimiento en la que se
encuentre la aplicación, aumentar la eficiencia del conjunto, y permitir suavidad y fluidez en
el movimiento. Es posible gestionar además un freno externo a través de ésta función (como
en el caso del motorreductor utilizado en el proyecto). La lógica de funcionamiento viene
previamente guardada en el variador, con lo cual solo es necesario indicar los datos de placa
de los componentes conectados. Las curvas en las cuales se basa el funcionamiento pueden
verse a continuación (Figura 4.24) para un arranque y parada en rampa típicos.
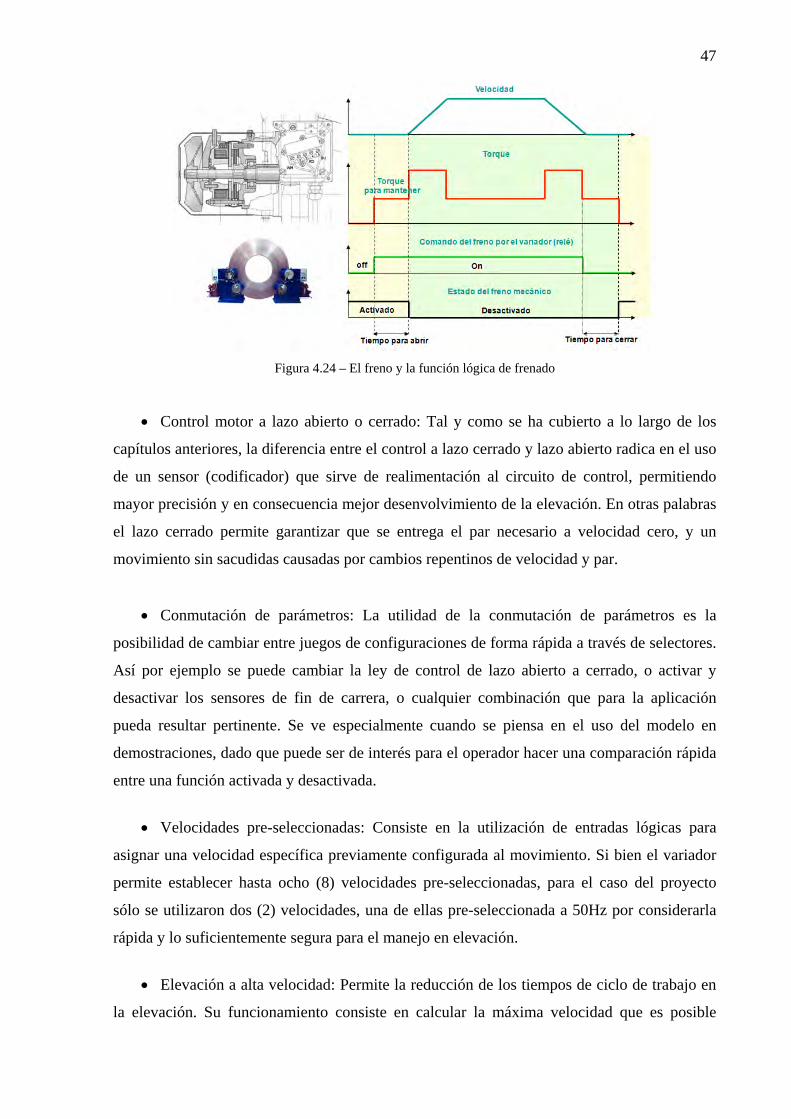
47
Figura 4.24 – El freno y la función lógica de frenado
• Control motor a lazo abierto o cerrado: Tal y como se ha cubierto a lo largo de los
capítulos anteriores, la diferencia entre el control a lazo cerrado y lazo abierto radica en el uso
de un sensor (codificador) que sirve de realimentación al circuito de control, permitiendo
mayor precisión y en consecuencia mejor desenvolvimiento de la elevación. En otras palabras
el lazo cerrado permite garantizar que se entrega el par necesario a velocidad cero, y un
movimiento sin sacudidas causadas por cambios repentinos de velocidad y par.
• Conmutación de parámetros: La utilidad de la conmutación de parámetros es la
posibilidad de cambiar entre juegos de configuraciones de forma rápida a través de selectores.
Así por ejemplo se puede cambiar la ley de control de lazo abierto a cerrado, o activar y
desactivar los sensores de fin de carrera, o cualquier combinación que para la aplicación
pueda resultar pertinente. Se ve especialmente cuando se piensa en el uso del modelo en
demostraciones, dado que puede ser de interés para el operador hacer una comparación rápida
entre una función activada y desactivada.
• Velocidades pre-seleccionadas: Consiste en la utilización de entradas lógicas para
asignar una velocidad específica previamente configurada al movimiento. Si bien el variador
permite establecer hasta ocho (8) velocidades pre-seleccionadas, para el caso del proyecto
sólo se utilizaron dos (2) velocidades, una de ellas pre-seleccionada a 50Hz por considerarla
rápida y lo suficientemente segura para el manejo en elevación.
• Elevación a alta velocidad: Permite la reducción de los tiempos de ciclo de trabajo en
la elevación. Su funcionamiento consiste en calcular la máxima velocidad que es posible

48
alcanzar de forma segura a través de la supervisión de la corriente entregada al motor. Para
esto previamente se debe tener configurados los datos de placa del motor utilizado.
• Medición de la carga: Se trata del reporte y uso de la señal de peso que entrega la
celda de carga al variador a través de una entrada lógica. Permite por ejemplo calcular con
exactitud el par del accionamiento.
• No linealidad de la referencia: Permite que la entrada analógica que sirve de referencia
de velocidad (potenciómetro), no siga un comportamiento lineal, sino que tenga cambios de
pendientes por secciones. Así es posible un control fino de velocidad en ciertos rangos, y un
control grueso en otros.
• Detección de deslizamiento: Esta función utiliza la realimentación del codificador para
permitir al variador de velocidad estimar en qué momento el deslizamiento está en valores
peligrosos, y en consecuencia activa el freno e informa el error. Así por ejemplo se puede
evitar desplomes de carga ante fallos de los dispositivos, o mayor exactitud en el control ante
deslizamientos operativos fuera de los límites admitidos.
• Detección de falla del freno: A través del contacto de supervisión del freno permite
garantizar que el freno actúa como indica el variador, y ante una falla del mismo puede
ordenar la entrega del par necesario para mantener la carga sin el desplome de la misma, hasta
la intervención de un operador. Asimismo esta función tiene la utilidad de permitir un control
más fino sobre el freno, a través del uso de impulsos para la activación y liberación del
mismo, sin el contacto de supervisión activado se utilizarían pulsos que tienden a causar
brincos o sacudidas en el movimiento.
• Gestión de límites de carrera: Permite la entrada al variador de las señales que envían
los sensores de fin de carrera dispuestos, así es posible configurar el tipo de parada que se
desea hacer cuando se llega a estos puntos en el movimiento.
• Posicionamiento por captadores: Útil en las aplicaciones de ascensores, permite la
parada en un sector específico del movimiento a través de la gestión de sensores configurados
a entradas lógicas.
• Funciones de tarjeta de control programable: La tarjeta “controller inside” (Figura
4.25) utilizada en el proyecto, permite darle funciones de PLC al modelo. La programación de
la misma es posible a través de la conexión a una computadora por redes con protocolos
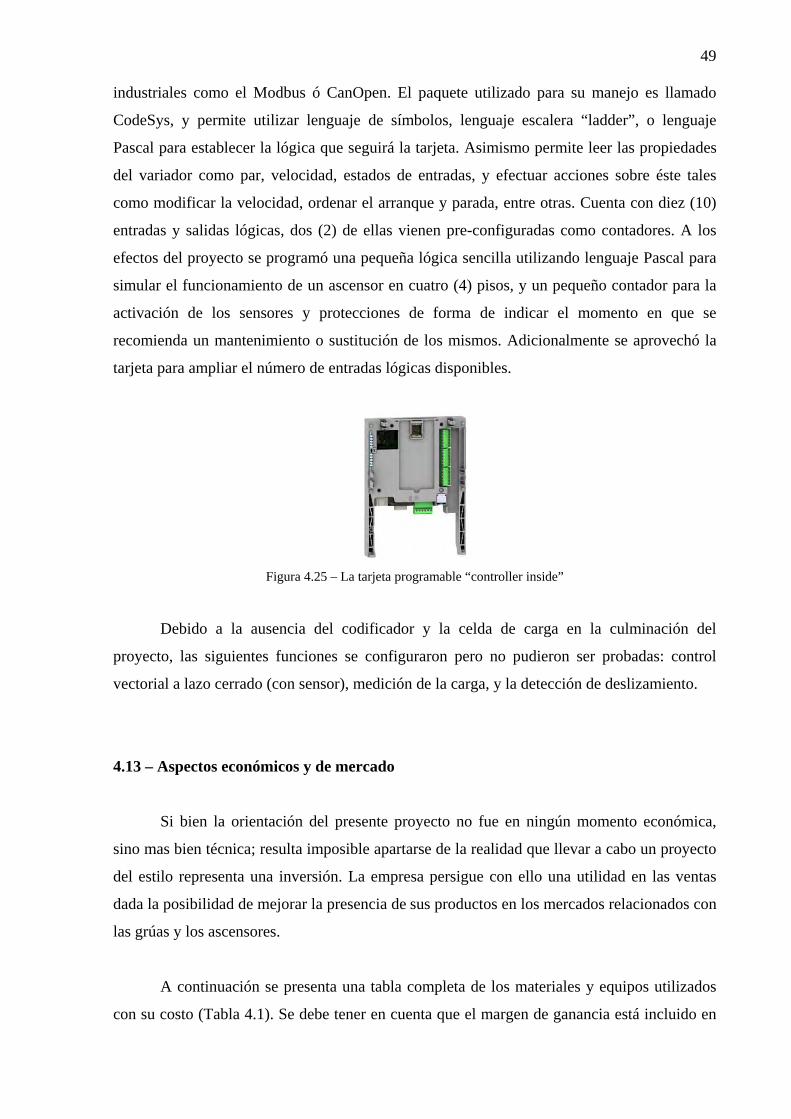
49
industriales como el Modbus ó CanOpen. El paquete utilizado para su manejo es llamado
CodeSys, y permite utilizar lenguaje de símbolos, lenguaje escalera “ladder”, o lenguaje
Pascal para establecer la lógica que seguirá la tarjeta. Asimismo permite leer las propiedades
del variador como par, velocidad, estados de entradas, y efectuar acciones sobre éste tales
como modificar la velocidad, ordenar el arranque y parada, entre otras. Cuenta con diez (10)
entradas y salidas lógicas, dos (2) de ellas vienen pre-configuradas como contadores. A los
efectos del proyecto se programó una pequeña lógica sencilla utilizando lenguaje Pascal para
simular el funcionamiento de un ascensor en cuatro (4) pisos, y un pequeño contador para la
activación de los sensores y protecciones de forma de indicar el momento en que se
recomienda un mantenimiento o sustitución de los mismos. Adicionalmente se aprovechó la
tarjeta para ampliar el número de entradas lógicas disponibles.
Figura 4.25 – La tarjeta programable “controller inside”
Debido a la ausencia del codificador y la celda de carga en la culminación del
proyecto, las siguientes funciones se configuraron pero no pudieron ser probadas: control
vectorial a lazo cerrado (con sensor), medición de la carga, y la detección de deslizamiento.
4.13 – Aspectos económicos y de mercado
Si bien la orientación del presente proyecto no fue en ningún momento económica,
sino mas bien técnica; resulta imposible apartarse de la realidad que llevar a cabo un proyecto
del estilo representa una inversión. La empresa persigue con ello una utilidad en las ventas
dada la posibilidad de mejorar la presencia de sus productos en los mercados relacionados con
las grúas y los ascensores.
A continuación se presenta una tabla completa de los materiales y equipos utilizados
con su costo (Tabla 4.1). Se debe tener en cuenta que el margen de ganancia está incluido en

50
cado uno, incluso en los productos de Schneider Electric, aunque para éstos se está aplicando
el descuento usual resultante de haber hecho esos pedidos como internos a la empresa.
Tabla 4.1 – Tabla completa de materiales y costos asociados
Descripción Cant Referencia Precio
unitario (BsF)
Precio total (BsF)
Proveedor
Motorreductor 1,5kW / 2HP 220VAC 1 4,990.02 4,990.02 SEW Eurodrive
Carrete y acople 1 1,744.00 1,744.00 Laboratorio E - USB
Acero ANSI 1045 para polea 1 606.48 606.48 Ferrum C. A.
Chumaceras tipo puente para eje del carrete 1 52.97 52.97 Bearings & Seals
Variador 1,5kW / 2HP 220VAC 1 ATV71HU15M3 2,011.20 2,011.20 Schneider Electric
Kit para montaje remoto 1 VW3A1102 100.56 100.56 Schneider Electric
Puerta para kit de montaje remoto 1 VW3A1103 39.76 39.76 Schneider Electric
Adaptador RJ45 hembra-hembra 2 VW3A1105 39.76 79.51 Schneider Electric
Cable remoto (2 puertos RJ45) 3m 2 VW3A1104R30 32.75 65.49 Schneider Electric
Resistencia frenado 60Ω 100W 2,4Kg 1 VW3A7702 306.36 306.36 Schneider Electric
Encoder 1024ppr RS422 5V 1 XCC1406PR11R 316.20 316.20 Schneider Electric
Tarjeta interfaz encoder RS422 1 VW3A3401 282.97 282.97 Schneider Electric
Sensores fin de carrera, sobrecarrera 4 XCKM106 70.72 282.89 Schneider Electric
Celda de carga tipo S de 1000 lbs 1 989.65 989.65 ELINCA
Tarjeta conversora de señal 4…20mA para celda 1 2,132.88 2,132.88 ELINCA
Montantes verticales 2000x1000x600 1 OLMV20 146.61 146.61 FAMENACA
Paneles superior e inferior 2000x1000x600 1 OLSI106 1,039.39 1,039.39 FAMENACA
Panel posterior 2000x1000 1 OLPO2010 562.70 562.70 FAMENACA
Zócalo individual 1000x600x100 1 ZUN106/100 374.59 374.59 FAMENACA
Puerta transparente 2000x1000 1 OLPU2010KT 1,429.12 1,429.12 FAMENACA
Puerta transparente 2000x600 1 OLPU206KT 1,090.48 1,090.48 FAMENACA
Pesas 150Kg. 1 1,500.00 1,500.00 Tienda deportiva
Base para pesas 1 100.00 100.00 Herrería
Gabinete de Variador 1 PLM75 1,156.77 1,156.77 SERVIELECA
Pulsador luminoso 22mm led amarillo 24 Vac/dc 1 XB4BW35B5 46.43 46.43 Schneider Electric
Selector 22mm maneta corta 2 posiciones 1 XB4BD21 36.36 36.36 Schneider Electric
Pulsador doble luminoso 22mm 24 Vac/dc 1 XB4BW84B5 74.83 74.83 Schneider Electric
Potenciómetro 2,2kOhm 3W 1 SZ1RV1202 63.91 63.91 Schneider Electric
Manipulador 22mm 2 direcc. 2 contactos/dirección 1 XD2GA8241 837.09 837.09 Schneider Electric
Disyuntor magnético 10A 2 GV2L14 100.13 200.26 Schneider Electric
Contactor tripolar 18A 220V AC 2 LC1D18M7 100.13 200.26 Schneider Electric
Interruptor termomagnético 3p 25A C60N 1 24352 105.93 105.93 Schneider Electric
Interruptor termomagnético 2p 4A C60N 1 24334 77.47 77.47 Schneider Electric
Guaya para 150Kg. 1 93.00 93.00 EPA
Total 23,136.14
A través del uso de bases de datos pertenecientes a la actividad de variación de
velocidad en la empresa, fue posible acceder al costo del modelo Francés LEVAGE utilizado

51
como referencia para llevar a cabo el proyecto. Según los documentos el modelo básico
LEVAGE tiene un costo de aproximadamente 25.000,00 € (sin incluir transporte, montaje,
ensamblaje, ni opciones adicionales). Observando el costo que resultó del modelo hecho en
ésta pasantía se tiene 23.136,14 BsF equivalentes aproximadamente a 6.725,62 €. Con lo cual
puede verse que resulta mucho más económico como se hizo que comprar el modelo Francés.
A esto se debe agregar además algunas ventajas tales como: el aprendizaje que queda a la
empresa luego del proyecto, la posibilidad de tener un modelo hecho a la medida de las
necesidades con características tales como poder trasladarlo (el modelo Francés es fijo), la
seguridad de conseguir repuestos o mejoras con los mismos proveedores utilizados para la
fabricación.

CAPÍTULO 5
PRUEBAS Y RESULTADOS
Para verificar el correcto funcionamiento del modelo construido, se procedió a realizar
las siguientes pruebas:
• Prueba en frío: Con el modelo desenergizado se verificó que no existiera ningún
cortocircuito en los componentes, a través del uso de un multímetro.
• Prueba de funcionamiento básico: Ya con el modelo energizado, consistió en la
inspección del funcionamiento del circuito de encendido, controles, configuración
básica, activación y desactivación del freno, capacidades térmicas, y circuito de
apagado (Figura 5.1).
• Prueba básica de movimiento: Consistió en realizar elevaciones sucesivas sin carga a
diferentes velocidades (Figura 5.2). Posteriormente aumentando la carga y repitiendo
la prueba hasta llegar al caso a plena carga (150Kg).
• Prueba a lazo abierto: Semejante a la prueba anterior pero utilizando la ley de control
vectorial a lazo abierto (sin sensor) y reportando en una tabla todas las variables de
interés para estudiar si el funcionamiento es el adecuado. Por su importancia ésta
prueba se detallará en la siguiente sección del capítulo.
Tal y como se comentó en el capítulo anterior, el funcionamiento a lazo cerrado no
pudo ser estudiado en las pruebas realizadas. Sin embargo fue posible realizar una pequeña
prueba utilizando como ley de control la ley tensión/frecuencia. Se debe recordar que dicha
ley NO es recomendada en aplicaciones de elevación dado que no proporciona un control
sobre el par. Como resultado a esta prueba el comportamiento de la elevación fue errático y
poco preciso, vale la pena destacar que en este caso el freno se tuvo que liberar a través de la
energización directa del mismo por un circuito externo, dado que la función de lógica de
frenado no es compatible con la ley de control tensión/frecuencia.
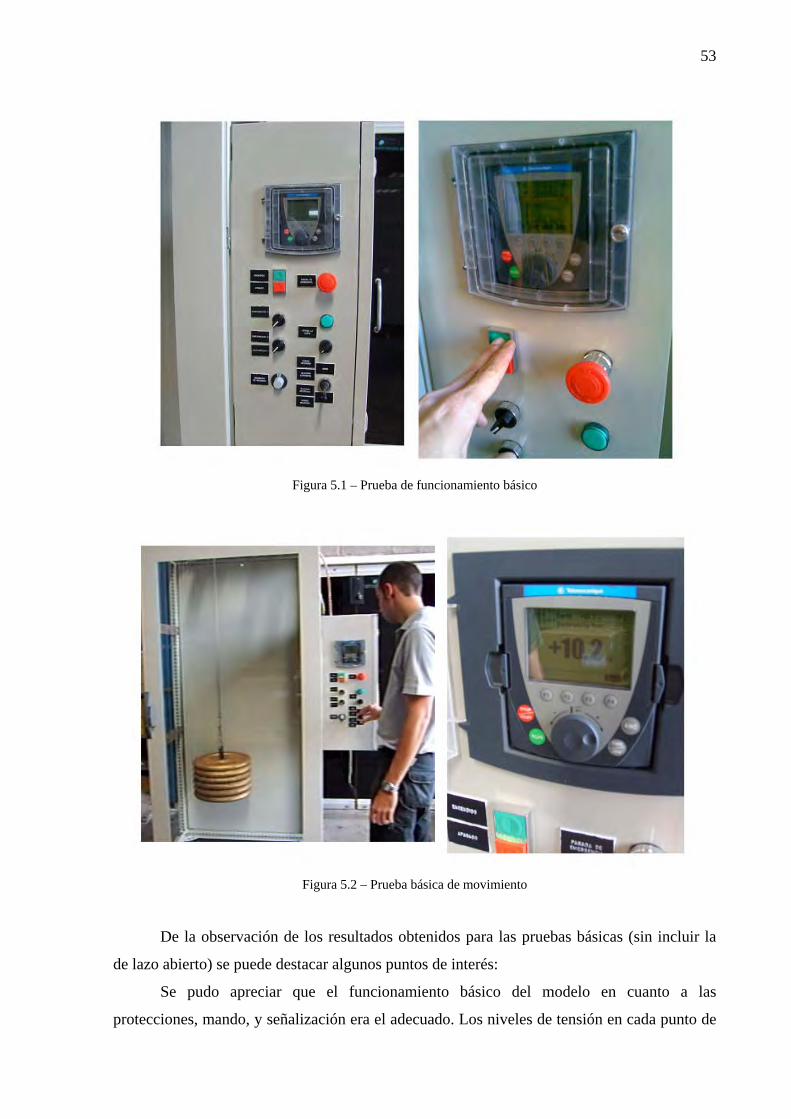
53
Figura 5.1 – Prueba de funcionamiento básico
Figura 5.2 – Prueba básica de movimiento
De la observación de los resultados obtenidos para las pruebas básicas (sin incluir la
de lazo abierto) se puede destacar algunos puntos de interés:
Se pudo apreciar que el funcionamiento básico del modelo en cuanto a las
protecciones, mando, y señalización era el adecuado. Los niveles de tensión en cada punto de

54
interés obedecían a los valores esperados. No se encontraron cortocircuitos en pruebas en frío.
Los circuitos de encendido y apagado funcionaron según lo planificado.
El movimiento básico de la carga en la maqueta fue apropiado, llevando las pesas de
manera uniforme a lo largo del recorrido de subida y bajada en todo el rango de velocidades.
Los sensores de fin de carrera tuvieron que ser ajustados para alcanzar las paradas en las
posiciones que se consideraban seguras, una vez reposicionados el funcionamiento de los
mismos fue óptimo, logrando detener la carga a distancias seguras (alrededor de 20cm antes
del tope) en la subida y la bajada.
5.1 – Prueba a lazo abierto:
Para la realización de la prueba a lazo abierto se configuró la ley de control vectorial
sin sensor en el variador de velocidad, y se realizaron subidas y bajadas sucesivas desde 0
hasta 150Kg en la carga, en pasos de 50Kg. Los resultados obtenidos se reportaron como se
muestra a continuación (Tablas 5.1, 5.2, 5.3, 5.4) y son producto del uso de funciones de
supervisión integradas en el variador de velocidad, así como la medición de tiempos con un
cronómetro.
Carga 0 Kg Tabla 5.1 – Prueba a lazo abierto con carga 0 Kg
Subida Bajada Velocidad referencia [Hz] 10 20 30 40 50 10 20 30 40 50
Tiempo [seg] 13.64 7.17 5.00 4.13 3.50 13.70 7.10 4.90 4.20 3.53 Velocidad [m/min] 7.04 13.39 19.20 23.24 27.43 7.01 13.52 19.59 22.86 27.20
Par máx [%] 9.4 11.5 12.6 13.2 14.8 10.6 8.8 10.4 12.2 14.4 Potencia sal mot máx [%] 2.0 4.0 6.0 8.0 11.0 2.0 3.0 5.0 7.0 10.0
Temp máx motor [%] 27.0 28.0 29.0 30.0 30.0 27.0 28.0 29.0 30.0 30.0 Temp máx variador [%] 62.0 64.0 65.0 66.0 67.0 62.0 64.0 65.0 65.0 67.0
Temp máx resist [%] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 Corriente [A] 3.2 3.2 3.2 3.3 3.3 3.2 3.2 3.2 3.3 3.3
Velocidad motor [rpm] 299 602 901 1200 1500 299 602 901 1200 1500

55
Carga 50 Kg Tabla 5.2 – Prueba a lazo abierto con carga 50 Kg
Subida Bajada Velocidad referencia [Hz] 10 20 30 40 50 10 20 30 40 50
Tiempo [seg] 13.27 7.25 5.21 4.47 3.78 13.02 7.22 5.18 4.40 3.67 Velocidad [m/min] 7.23 13.24 18.43 21.48 25.40 7.37 13.30 18.53 21.82 26.16
Par máx [%] 30.0 29.3 31.2 30.2 33.9 7.4 7.3 5.6 5.0 4.0 Potencia sal mot máx [%] 5.0 10.0 16.0 20.0 27.0 1.0 3.0 3.0 4.0 4.0
Temp máx motor [%] 24.0 26.0 26.0 26.0 25.0 25.0 26.0 26.0 26.0 25.0 Temp máx variador [%] 56.0 59.0 60.0 61.0 61.0 58.0 59.0 61.0 61.0 61.0
Temp máx resist [%] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 Corriente [A] 3.4 3.5 3.6 3.6 3.7 3.2 3.2 3.2 3.2 3.2
Velocidad motor [rpm] 300 599 899 1201 1501 300 599 899 1201 1501
Carga 100 Kg Tabla 5.3 – Prueba a lazo abierto con carga 100 Kg
Subida Bajada Velocidad referencia [Hz] 10 20 30 40 50 10 20 30 40 50
Tiempo [seg] 13.24 7.10 5.26 4.41 3.83 12.99 7.00 5.09 4.41 3.83 Velocidad [m/min] 7.25 13.52 18.25 21.77 25.07 7.39 13.71 18.86 21.77 25.07
Par máx [%] 47.7 48.7 49.8 49.1 50.0 22.9 22.2 20.9 19.4 17.5 Potencia sal mot máx [%] 8.0 17.0 25.0 32.0 40.0 4.0 8.0 11.0 14.0 16.0
Temp máx motor [%] 19.0 21.0 21.0 21.0 21.0 19.0 21.0 21.0 21.0 21.0 Temp máx variador [%] 51.0 53.0 54.0 54.0 54.0 51.0 53.0 54.0 54.0 54.0
Temp máx resist [%] 0.0 0.0 0.0 2.0 2.0 0.0 1.0 4.0 6.0 7.0 Corriente [A] 3.9 4.0 4.0 4.1 4.2 3.5 3.5 3.4 3.4 3.4
Velocidad motor [rpm] 303 604 899 1200 1503 302 604 899 1199 1502
Carga 150 Kg Tabla 5.4 – Prueba a lazo abierto con carga 150 Kg
Subida Bajada Velocidad referencia [Hz] 10 20 30 40 50 10 20 30 40 50
Tiempo [seg] 13.47 7.19 5.30 4.30 3.79 12.92 7.05 4.94 4.12 3.62 Velocidad [m/min] 7.13 13.35 18.11 22.33 25.33 7.43 13.62 19.43 23.30 26.52
Par máx [%] 66.2 64.5 65.7 67.5 67.0 36.8 37.3 35.8 32.1 30.6 Potencia sal mot máx [%] 11.0 22.0 34.0 44.0 54.0 6.0 13.0 18.0 23.0 26.0
Temp máx motor [%] 15.0 15.0 17.0 16.0 16.0 16.0 16.0 17.0 16.0 16.0 Temp máx variador [%] 41.0 44.0 46.0 49.0 50.0 41.0 44.0 47.0 49.0 50.0
Temp máx resist [%] 0.0 6.0 10.0 11.0 14.0 0.0 13.0 19.0 18.0 24.0 Corriente [A] 4.4 4.5 4.6 4.6 4.7 3.9 3.8 3.8 3.7 3.8
Velocidad motor [rpm] 303 603 901 1205 1500 303 602 901 1204 1499
Leyenda: Máximos Mínimos
De la observación de los resultados obtenidos para la prueba a lazo abierto se puede
destacar algunos aspectos de interés:

56
El modelo construido es capaz de:
Realizar elevaciones en un recorrido vertical libre de 1,6 m
En un rango de velocidades de 0 a 27 m/min
Con cargas de 0 a 150 Kg (teóricamente capaz de elevar más)
Control en el movimiento con varias leyes y opciones de ajuste
Con un peso total (sin carga) de 130 Kg
Los tiempos de subida y bajada para cada valor de velocidad se mantuvieron cercanos
(diferencias alrededor del 3%) independientemente de la carga elevada (Figura 5.3). Esto
sugiere que el variador estuvo en capacidad de regular la potencia y par entregado de forma
de alcanzar una velocidad aproximadamente constante, tal y como se desea en este tipo de
control y aplicaciones.
Figura 5.3 – Gráfica velocidad de referencia vs velocidad lineal para 0Kg y 150Kg
La velocidad máxima alcanzada se dio para la subida sin carga, y fue de 27,43m/min.
Se debe recordar que se había diseñado para obtener una velocidad máxima cercana a los
30m/min, con lo cual el resultado es bastante aceptable. La diferencia con el valor teórico
esperado se debe a las pérdidas mecánicas y eléctricas, así como el hecho que las dimensiones
del carrete se tuvieron que adaptar ligeramente para cumplir con la funcionalidad técnica de la
pieza.
El par máximo entregado ocurrió para la subida con carga de 150Kg y fue de 67,5%
del par nominal. Esto es lógico dado que es el caso más exigente de toda la prueba. El valor

57
de par máximo está aún por debajo del 100% porque se debe recordar que el motorreductor
está sobre dimensionado para la carga que se está elevando (por razones de mercadeo antes
comentadas). Asimismo la potencia máxima de salida ocurre para el mismo caso por la misma
justificación y es del 54% de la nominal (Figura 5.4).
Figura 5.4 – Gráfica velocidad de referencia vs potencia máxima de salida para 150Kg
Es de destacar que el par máximo entregado se mantiene en valores cercanos
(diferencias del orden del 10%) para todo el rango de velocidades en cada caso (Figura 5.5).
Lo cual es consecuente con la teoría que indica que los motores controlados por variadores de
velocidad entregan un par constante en todo el rango de velocidad a través de la regulación
del flujo en el motor.
Figura 5.5 – Gráfica velocidad de referencia vs par máximo para 150Kg

58
Las temperaturas del variador y motor se vieron apenas exigidas. Es de considerar que
todos los casos de esta prueba se hicieron de forma sucesiva, con lo cual la temperatura del
variador va aumentando a medida que avanzó la prueba debido a la mayor cantidad de tiempo
en funcionamiento. Sin embargo la temperatura máxima del variador llega apenas al 60% de
su capacidad nominal luego de toda la prueba, con lo cual se puede intuir que el equipo está
correctamente especificado para la aplicación de éste modelo. En cuanto al motor la máxima
fue de apenas 30% de su capacidad térmica nominal.
Respecto a la temperatura en la resistencia de frenado, se puede apreciar que durante
la subida prácticamente no fue utilizada. Sin embargo en la bajada se puede observar su
contribución disipando la energía remanente para controlar la velocidad, llegando a un
máximo de temperatura en el caso a carga y velocidad máxima de 24% de su capacidad
térmica nominal (Figura 5.6). Resultado totalmente lógico si se considera que es el caso
donde se debe compensar en mayor medida a la fuerza de gravedad. Además el valor de 24%
indica que la decisión de utilizar una resistencia de uso general, y no una robusta de
elevación, fue apropiada. Dado que se pudo aprovechar su menor tamaño, y su capacidad para
disipar la energía remanente no se vio exigida.
Figura 5.6 – Gráfica vel. de ref. vs temp. máx. en resistencia de frenado para 150Kg
Los valores de corriente y velocidad en el eje estimados por el variador, indican que se
está realizando un control eficiente donde apenas hay diferencias con la velocidad esperada.
Sin embargo pudo haber sido interesante, de disponer del codificador, comparar la regulación
con la prueba a lazo cerrado que es en principio mucho más precisa.

59
En general se pudo apreciar que el modelo construido cumple la función para la cual
fue diseñado, y los requerimientos técnicos que debe tener una aplicación de elevación ya sea
para grúas o para ascensores. Además presenta todas las características que se deseaban para
hacer válido el modelo en demostraciones y entrenamientos.
60
CONCLUSIONES Y RECOMENDACIONES
Luego de culminado el periodo de pasantías y la realización del proyecto, podemos
concluir en algunos aspectos técnicos, económicos y académicos que permiten hacer una
revisión del trabajo que se llevó a cabo.
Es evidente que haber llegado a un diseño que cumple las características que se
requerían, y posteriormente lograr construirlo probando que efectivamente realiza sus
funciones de forma apropiada, permite afirmar que los objetivos planteados al principio del
proyecto de grado se alcanzaron completamente. Los inconvenientes económicos y logísticos
que se presentaron sirvieron como aprendizaje para demostrar la realidad del día a día en las
empresas, y la forma de superarlos sin sacrificar las metas propuestas.
Técnicamente se comprobó la efectividad de los variadores de velocidad como
métodos de control de movimiento en motores. Se observó las particularidades del
movimiento de elevación en aspectos tales como: la exigencia de operación en régimen
generador y régimen motor de la máquina de inducción, el gran par inicial necesario para
vencer la inercia de las cargas elevadas, los requerimientos de velocidad y leyes de control
para alcanzar un control eficiente, entre otros. Asimismo de observó la forma de solucionar
estos aspectos a través de la electrónica de potencia y la mecánica asociada. En términos de
par, potencia, temperatura y corrientes el modelo respondió a la premisa teórica del estudio.
Se pudo diseñar y construir un modelo que incluyó distintos aspectos técnicos tales
como estudios de protecciones, análisis de esfuerzos y cargas, planificación, logística, procura
de materiales, especificaciones o dimensionamiento de equipos, realización de planos y
ejecución de cableado eléctrico, entre otras. Se logró un diseño portátil, eficaz y seguro para
demostraciones y entrenamientos.
Desde el punto de vista económico se observó que la realización de la maqueta es
rentable, si se considera que en comparación a otros modelos similares su costo fue mucho
menor, y que supondrá un alza en las ventas de los productos asociados a las grúas y
ascensores comercializados por la empresa. En cuanto a las opciones de mercadeo se pudo ver
que las grúas y ascensores en el país utilizan activamente los variadores de velocidad, y tienen
aspectos por mejorar en los que el modelo construido puede hacer una labor importante.
61
Como visión al futuro el diseño del modelo quedó abierto a mejoras y modificaciones.
La posibilidad de agregar los componentes faltantes del diseño inicial (codificador y celda de
carga) fue considerada y el modelo preparado para éste fin. Una de las sugerencias que se
puede hacer para la continuación del desarrollo del modelo, es agregar sensores de
movimiento a lo largo de la estructura para demostrar la lógica de ascensores utilizada en la
tarjeta controladora programable.
A medida que la tecnología continúe avanzando para solucionar los problemas y retos
presentes en las industrias, iniciativas como éstas serán vitales para permitir un desarrollo
apropiado que lleve a las empresas del país a actualizarse y hacer más eficiente su labor.

62
REFERENCIAS BIBLIOGRÁFICAS
[1] Alexander Bueno Montilla, “Apuntes de Máquinas Eléctricas”, Dpto. de Tecnología Industrial, Universidad Simón Bolívar, Sartenejas. (2007) [2] José Manuel Aller, “Máquinas Eléctricas Rotativas, Introducción a la teoría general”, Editorial Equinoccio, Valle de Sartenejas. (2008) [3] Alexander Bueno Montilla, “Electrónica de Potencia: Aspectos generals y convertidores electrónicos”, Dpto. de Tecnología Industrial, Universidad Simón Bolívar, Sartenejas. (2007) [4] Blaabjerg, Villafáfila, Thoegersen, Galceran, “Convertidores de frecuencia: retos y aplicaciones futuras”, CITCEA-UPC, no. 361, Abril. (2005) [5] S. J. Chapman. "Máquinas Eléctricas". Tercera Edición. McGraw Hill. (2000) [6] White, Woodson. "Electromechanical Energy Conversion". John Wiley & Sons. (1958) [7] HATRE, A.F. “Aparatos de elevación y transporte elevado de cargas”, en O.S.M.E. Tratado de Higiene y Seguridad del Trabajo Madrid, Ministerio de Trabajo. (1971) [8] Schneider Electric Industries SAS, “Guía Esencial Automatización y Control de Movimiento”, Francia. (2006) [9] Schneider Electric Industries SAS, “Catálogo Altivar 71”, Francia. (2007) [10] Schneider Electric Industries SAS, “Manual de Programación Altivar 71”, Francia. (2008) [11] Guarinos Bertrand, “Hoisting Vertical Movement”, Motion & Drives domain, Telemecanique, Francia. (2008) [12] Guarinos Bertrand, “LEVAGE Hoisting Demo”, Entrenamiento Altivar 71, Telemecanique, Francia. (2008) [13] D.Clenet, “Cuaderno Técnico n° 208 – Arrancadores y variadores de velocidad electrónicos”, Schneider Electric. (2005)

63
APÉNDICE A
COORDINACIÓN DE PROTECCIONES ECODIAL©
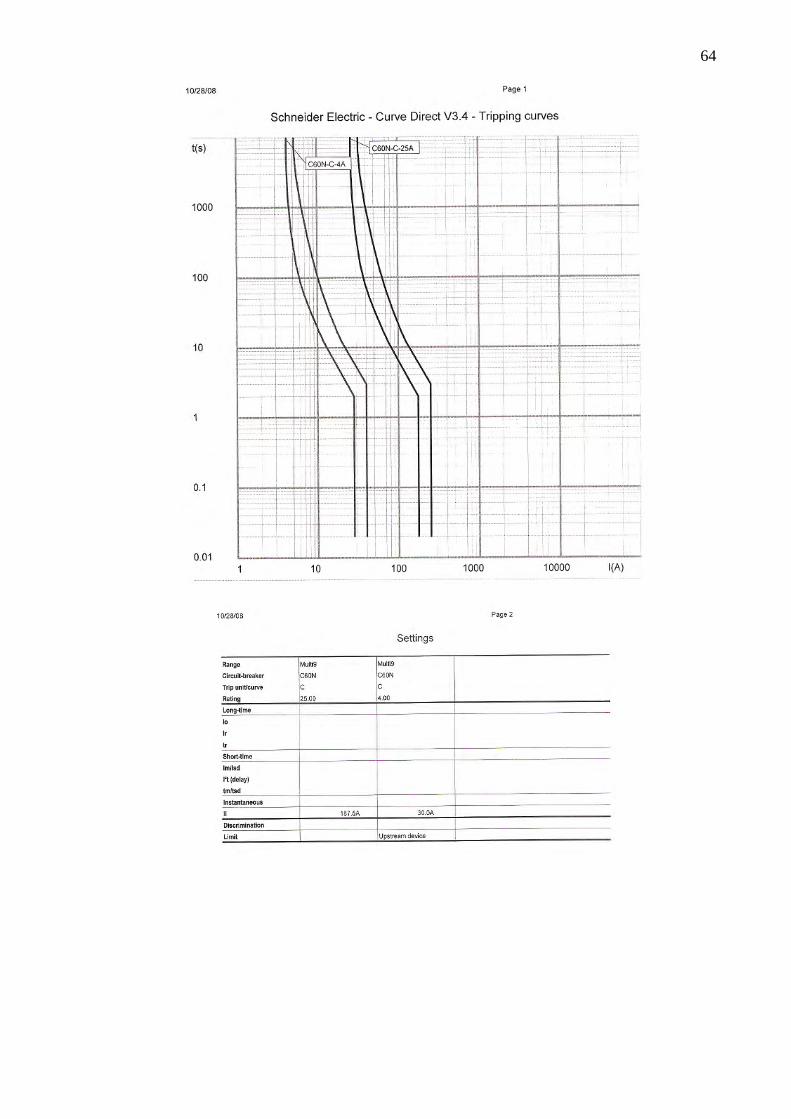
64

65

66
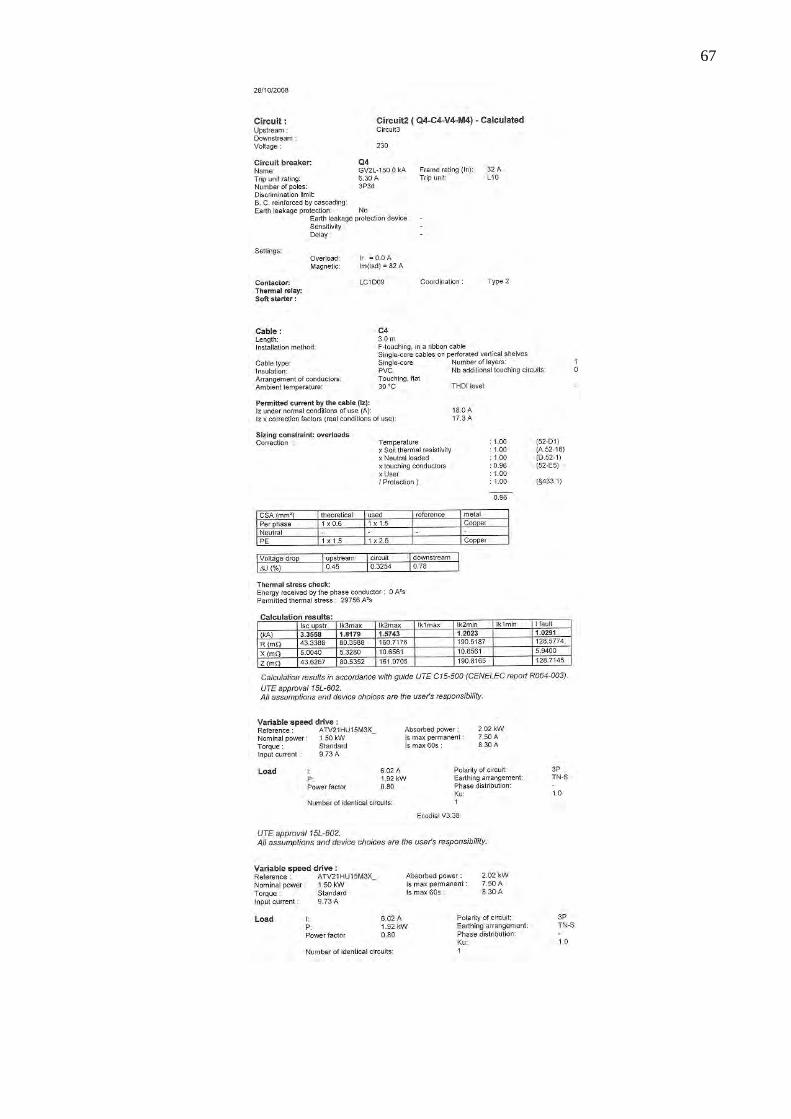
67
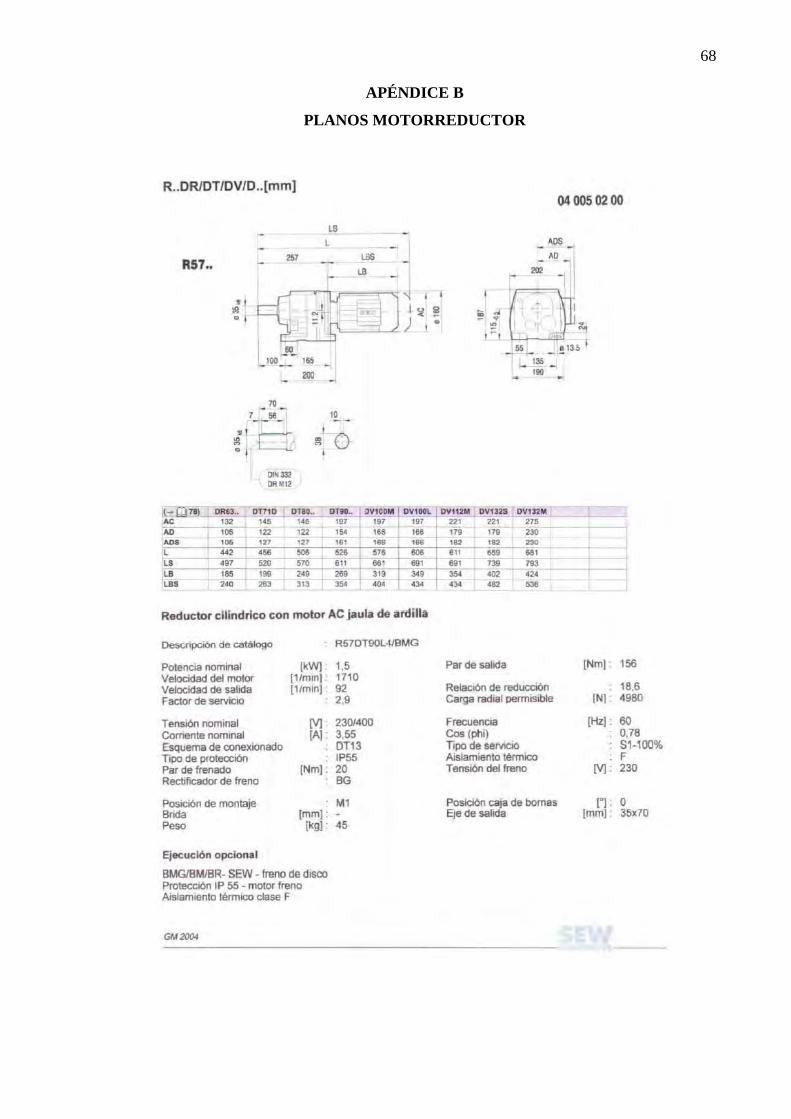
68
APÉNDICE B
PLANOS MOTORREDUCTOR
69
Schneider Electric Venezuela, S.A. Av. Intercomunal Guarenas – Guatire, Sector Vega Arriba, Parcela Industrial 9C,Guatire, Edo. Miranda - Venezuela Tel. 00 (58) 212 340 08 11 http://www.schneider-electric.com.ve RIF : J-00116620-3
APÉNDICE C
MANUAL DE USUARIO
Maqueta industrial de elevación con ATV71
Manual de usuario
La maqueta o modelo industrial de elevación, fue diseñada con el fin de ser utilizada en demostraciones
y entrenamientos asociados a la familia de variadores Altivar 71 en aplicaciones de elevación. Su construcción es
modular, lo que permite su desarme para ser trasladada. Se recomienda el transporte del modelo en cuatro partes
fundamentales: en primer lugar el módulo motorreductor, o sección superior compuesta por motorreductor,
carrete, chumacera, acople, sensores y cableado asociado; un segundo módulo variador, compuesto por el
gabinete y la botonería asociada al control del modelo; el tercer modulo armario, compuesto por la estructura
modular con puerta de vidrio; y un cuarto módulo de carga, compuesto por las pesas y su base.
• Principio fundamental
La maqueta permite simular el movimiento de elevación en grúas y ascensores, con el fin de estudiar
sus particularidades y las capacidades del variador de velocidad para controlar el movimiento. Por esta razón el
objetivo del modelo es desplazar una carga que puede ser variada a voluntad entre 5Kg y 155Kg con pasos de
25Kg a través de una trayectoria vertical, con la posibilidad de modificar el método de control utilizado, la
velocidad de desplazamiento, la limitación de corriente, el control de finales de carrera, entre otras utilidades y
funciones.
• Método de energización y arranque
Para comenzar a utilizar la maqueta durante una demostración, se debe:
1. Realizar las conexiones de todos los cables dejando de último el conector de tensión
2. Considerar las medidas de seguridad: mantener cerrada la puerta del gabinete del variador una
vez conectada la tensión para evitar el contacto con partes energizadas, mantener cerrada la
puerta del armario y guardar una distancia prudencial con éste durante la elevación, evitar el
contacto con cualquier parte móvil del modelo, asegurarse que todos los componentes están
firmemente apoyados o conectados, y cualquier otra medida de seguridad que se considere
prudente según el caso.
3. Abrir la puerta del gabinete variador
4. Activar el interruptor principal (ITM1) ubicado en la parte superior izquierda del panel
5. Activar el interruptor del freno (ITM2) ubicado a la derecha del anterior
6. Activar el disyuntor (Q1)
7. Cerrar la puerta del gabinete variador
8. Presionar el pulsador de encendido (S1) durante al menos 2 segundos
9. Se debe observar en el terminal gráfico (HID) la inicialización del variador de velocidad, hasta
el estado “ready” (RDY)

70
Schneider Electric Venezuela, S.A. Av. Intercomunal Guarenas – Guatire, Sector Vega Arriba, Parcela Industrial 9C,Guatire, Edo. Miranda - Venezuela Tel. 00 (58) 212 340 08 11 http://www.schneider-electric.com.ve RIF : J-00116620-3
10. Seleccionar la velocidad de referencia deseada en el potenciómetro y proceder al movimiento o
función que se quiera demostrar
• Método de parada y desenergización
Para la desconexión del modelo, se debe:
1. Asegurarse que no se está moviendo la carga (soltando la palanca de movimiento o
presionando el pulsador de parada de emergencia (S3) si es necesario)
2. Presionar el pulsador de apagado (S2)
3. Se debe observar que la imagen en el terminal gráfico (HID) desaparece
4. Abrir la puerta del gabinete del variador
5. Desactivar el disyuntor (Q1)
6. Desactivar el interruptor del freno (ITM2)
7. Desactivar el interruptor principal (ITM1)
8. Cerrar la puerta del gabinete del variador
9. Desconectar el cableado empezando por la tensión y con las medidas pertinentes de seguridad
• Controles y opciones del modelo
La maqueta cuenta en su panel de control (al costado del gabinete del variador), con lo siguiente:
La compuerta para la conexión del terminal gráfico (HID) o el cable remoto
Los pulsadores de encendido (S1) y apagado (S2)
El pulsador de parada de emergencia (S3)
Los selectores de configuración (S5 y S6)
El selector para permitir el apoyo al suelo (S4)
El potenciómetro de referencia de velocidad
La palanca de movimiento de dos velocidades por dirección
Si bien los controles más usados están de forma explícita en el panel de control, es posible realizar
cualquier modificación o selección de funciones a través del uso del terminal gráfico (HID), el enlace de
comunicaciones con un control remoto, o un computador. Para estos efectos se recomienda siempre contar con el
manual de programación actualizado para el Altivar 71.
• Funciones en una demostración
Si bien las demostraciones con la maqueta de elevación pueden hacerse de la forma que el entrenador
desee, una forma típica de realizarla sería la siguiente:
Establecer la configuración 1 con el control a lazo abierto, y la configuración 2 con el control a lazo
cerrado. Se puede establecer la configuración 3 para otra opción como por ejemplo la elevación a alta velocidad.
Una vez energizado y arrancado el modelo, demostrar una elevación sin carga a lazo abierto tanto a velocidad de
71
Schneider Electric Venezuela, S.A. Av. Intercomunal Guarenas – Guatire, Sector Vega Arriba, Parcela Industrial 9C,Guatire, Edo. Miranda - Venezuela Tel. 00 (58) 212 340 08 11 http://www.schneider-electric.com.ve RIF : J-00116620-3
referencia como a máxima velocidad. Demostrar el funcionamiento de los ralentizadores de carrera y finales de
carrera. Demostrar la parada de emergencia. Mostrar las funciones
de medición de la carga, posición por captadores, lógica de frenado y cualquier otra función pertinente. Colocar
media carga o máxima carga según se desee y realizar una elevación a lazo abierto. Cambiar a la configuración 2
a través del selector. Realizar una elevación a lazo cerrado y comparar con la elevación anterior. Simular una
falla en el freno a través de la desconexión repentina del mismo en la borna exterior y demostrar las protecciones
de frenado. Simular una falla de deslizamiento a través de la desconexión del encoder y demostrar las
protecciones asociadas.
Cualquier función o actualización que se desee agregar a las demostraciones o entrenamientos se
pueden realizar siguiendo los mismos criterios de precauciones especificados en los manuales del variador de
velocidad Altivar 71.