LABORATORIOS DE SENSORICA INDUSTRIAL FIIS 2011.2

of 21
-
Upload
juan-carlos-m-c -
Category
Documents
-
view
351 -
download
0
description
DATOS E INFORME DE SENSORICA
Transcript of LABORATORIOS DE SENSORICA INDUSTRIAL FIIS 2011.2
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
LABORATORIO N 01 SENSORES CAPACITIVOS, INDUCTIVOS Y OPTICOS1. OBJETIVO El objetivo del presente laboratorio es conocer y experimentar el funcionamiento de los sensores de contacto, capacitivos e inductivos, as como tambin saber seleccionar y dimensionar dichos instrumentos para otras aplicaciones, en estas experiencias se utilizaran equipos adicionales para poder realizarlas con xito.
2. PROCEDIMIENTOS SENSOR INDUCTIVO 1) Montar el equipo necesario para esta prueba segn las indicaciones del profesor y llenar el siguiente cuadro, hacer varias mediciones para el acero inoxidable (pieza 4) 2)
Tabla 1 Sensor Inductivo D.ER-SIE - M18ITEM 1 2 3 4 5 PUNTO DE CONEXIN 4.44 4.77 4.73 4.66 4.55 PUNTO DE DESCONEXION 4.67 4.95 4.82 4.68 4.62 HISTERESIS 0.23 0.18 0.09 0.02 0.07
JUAN CARLOS MATOS CANCHO
Pgina 1
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
Tabla 2 Sensor Inductivo D.ER-SIE - M12SITEM 1 2 3 4 5 PUNTO DE CONEXIN 2.47 2.69 2.62 2.57 2.63 PUNTO DE DESCONEXION 2.67 2.87 2.72 2.61 2.74 HISTERESIS 0.20 0.18 0.10 0.04 0.11
2) Realizar las mediciones para los diferentes materiales segn las indicaciones del profesor, observe bien lo que sucede y anote. Tabla 3 Punto de Punto de Conexin Desconexin 3.00 3.13 1.67 2.70 2.40 No detecta 3.25 3.37 1.56 2.81 2.30 No detecta Factor de Reduccin 1.00 0.96 0.44 0.44 0.40 No detecta
ITEM 1 2 3 4 5 6
Material Acero Dulce Acero Inox. Aluminio Latn Cobre Plstico
Histresis 0.25 0.24 0.11 0.11 0.10 No detecta Und: mm
OBS: el plstico no puede ser detectado, ya que se est utilizando un sensor inductivo, en el que es necesario para su atenuacin otro campo magntico proveniente del material a sensar. 3) Una vez que se hayan tomado los valores anteriores y con un solo material de su seleccin proceder a variar el ngulo de inclinacin del objeto a sensar y llenar la siguiente tabla. Tabla 4 Punto de Conexin 1.82 10.20 20.50 1.11 Punto de Desconexin 1.88 10.44 20.55 1.24
ITEM 1 2 3 4
Angulo 0 10 20 90
Histresis 0.06 0.24 0.05 0.13 Pgina 2
JUAN CARLOS MATOS CANCHO
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
SENSOR CAPACITIVO 1) Montar el equipo necesario para esta prueba segn las indicaciones del profesor y llenar el siguiente cuadro. Tabla 5 Punto de Conexin 7.24 32.89 20.65 13.43 15.27 9.68 26.19 12.53 Punto de Desconexin 7.20 31.67 19.30 12.12 14.02 8.95 25.31 11.75
ITEM 1 2 3 4 5 6 7 8
Material Acero Dulce Acero Inox. Aluminio Latn Cobre Carbn Goma Plastico Trasparente
Histresis 0.04 1.22 1.35 1.31 1.25 0.73 0.88 0.78
2) Una vez que se hayan tomado los valores anteriores y con algunos materiales proceder a variar el ngulo a sensar y llenar las siguientes tablas. Tabla 6 Acero InoxidableITEM 1 2 3 4 5 6 7 8 9 10
Angulo 0 10 20 30 40 50 60 70 80 90
Punto de Conexin 24.67 16.74 3.21 7.70 10.12 10.83 12.54 9.82
Punto de Desconexin 23.02 15.05 1.74 6.37 8.76 9.59 10.92 8.5
Histresis 1.65 1.69 1.47 1.33 1.36 1.24 1.62 1.32 Und: mm
JUAN CARLOS MATOS CANCHO
Pgina 3
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
Tabla 7
Plstico TrasparenteITEM 1 2 3 4 5 6
Angulo 0 10 20 30 40 50 90
Punto de Conexin 35.91 7.08 12.62 5.84 8.50 10.59 10.80
Punto de Desconexin 35.44 6.46 11.78 5.96 7.83 9.94 10.20
Histresis 0.47 0.62 0.84 0.12 0.67 0.65 0.60 Und: mm
7
3) Llenar el siguiente cuadro con las respectivas distancias de deteccin para cada espesor de plstico, observe detenidamente lo que sucede.
Tabla 8
ITEM 1 2 3 4 5 6 7
Grueso de Material (mm) Plstico (2.0) Plstico (3.0) Plstico (5.0) Plstico (8.0) Plstico (11.0) Plstico (14.0) Plstico (17.0)
Distancia de Deteccin 15.32 14.95 13.77 13.24 12.29 12.00 11.93 Und: mm
JUAN CARLOS MATOS CANCHO
Pgina 4
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
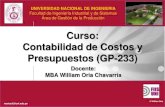
4) Grafique lo siguiente: distancia de deteccin vs Grueso del materia, tomarlos valores de la tabla anterior.
Distancia vs Grueso18 16 Distancia de Deteccin 14 12 10 8 6 4 2 0 0.0 5.0 10.0 Grueso de Material 15.0 20.0 15.32 14.95 13.77
13.24
12.29
12.00
11.93
SENSORES FOTOELECTRICOS
SOG RT M
En esta parte del laboratorio se proceder a identificar los diferentes dispositivos pticos, adems se debern comparar las distancias a las cuales estos dispositivos conmutan.
1. REFLEXIVO Observe y anote las distancias mximas de deteccin
Sensor
Objeto
SOG RT M Se obtuvo una distancia mxima de 80 cm.
ER - SOE
JUAN CARLOS MATOS CANCHO
Pgina 5
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
2. DIFUSO Observe y anote las distancias mximas de deteccin
Sensor
SOG RT M Se obtuvo una distancia mxima de 43 cm
FIBRA OPTICA
La fibra ptica es un medio de transmisin empleado habitualmente en redes de datos; un hilo muy fino de material transparente, vidrio o materiales plsticos, por el que se envan pulsos de luz que representan los datos a transmitir. El haz de luz queda completamente confinado y se propaga por el interior de la fibra con un ngulo de reflexin por encima del ngulo lmite de reflexin total, en funcin de la ley de Snell. La fuente de luz puede ser lser o un LED.
JUAN CARLOS MATOS CANCHO
Pgina 6
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
SENSOR INDUCTIVO PROPORCIONALAscendente Descendente
Sensor
Objeto
-10Zona Muerta
0
20
40
Valor TericoITEM 1 2 3 4 5
% 0 25 50 75 100 mm 0 100 200 300 400 mA 4 8 12 16 20
Valor Encontrado Ascendente (mA)
Error Ascendente
Valor Encontrado Descendente (mA)
Error Descendente
Histresis (mA)
3.95 7.95 11.98 15.56 19.26
0.05 0.05 0.02 0.44 0.74
3.83 7.99 11.97 15.75 19.21
0.17 0.01 0.03 0.25 0.79
0.12 0.04 0.01 0.19 0.05
Fotos de experiencias en laboratorio
JUAN CARLOS MATOS CANCHO
Pgina 7
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
INFORME FINALPara la realizacin del informe, el alumno tendr en cuenta las hojas de laboratorio as como las observaciones que se tuvo al momento de realizar las experiencias, as mismo dicho informe debe contener lo siguiente: 1) Analice los valores tomados en la tabla 1 y 2, e indique porque existe variacin entre una y otra muestra. Las dos muestras son con un sensor inductivo y con el mismo material a sensar con el sensor es de M18 y en el sensor M12, se observo que con el sensor M18 se tuvo mayor alcance en el punto de conexin y desconexin. 2) Indique usted sus conclusiones con respecto a los datos tomados en la tabla 3, as mismo indique si los valores de reduccin son iguales o casi iguales a los estudiados en clase, explique. Viendo los valores tericos en la siguiente tabla:
Comparando: Se observa que los valores encontrados u obtenidos en nuestra experiencia se acercan a los valores teoricos. 3) Indique usted cuan significante es considerar la inclinacin de un objeto cuando este debe ser detectado tanto por un sensor inductivo como capacitivo, explique detalladamente. Lo ms importante en toda deteccin por medio de sensores ya sea inductivos y/o capacitivos es el cuan cercano este el objeto para el cual ser detectado por el sensor ya que sea cuales quiera de estos tipo de sensores importa mucho ya que por sus principios los cuales estn construidos hacen que vari ya sea la lneas de campo magntico o elctrico as como se muestra en la foto siguiente.
JUAN CARLOS MATOS CANCHO
Pgina 8
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
4) De los materiales colocados tanto en un sensor capacitivo como inductivo, que nos puede decir. Para los sensores capacitivos los cuales reaccionan ante metales y no metales que al aproximarse a la superficie activa sobrepasan una determinada capacidad. La distancia de conexin respecto a un determinado material es tanto mayor cuanto ms elevada sea su constante dielctrica. Las ventajas del sensor capacitivo son algunas ms que en el caso de los sensores inductivos como por ejemplo: La primera ventaja es comn para ambos, detectan sin necesidad de contacto fsico, pero adems esto sensor lo realiza de cualquier objeto. Adems, debido a su funcionamiento tiene muy buena adaptacin a los entornos industriales, adecuado para la deteccin de materiales polvorientos o granulados. La duracin de este sensor es independiente del nmero de maniobras que realice y soporta bien las cadencias de funcionamiento elevados. Entre los inconvenientes se encuentra el alcance, dependiendo del dimetro del sensor, puede alcanzar hasta los 60mm, igual que la modalidad inductiva. Otro inconveniente es que depende de la masa a detectar, si quiero realizar una deteccin de cualquier tipo de objeto este sensor no nos sirve, puesto que depende de la constante elctrica. Esta desventaja viene encadenada con la puesta en servicio, antes de colocar el sensor lo tenemos que instalar; los detectores cuentan con un potencimetro de ajuste que permite ajustar la sensibilidad. Segn la aplicacin ser necesario adaptar el ajuste, por ejemplo para materiales de constante dielctrica (er) dbil como el papel, cartn o vidrio, en caso de tener una er fuerte tenemos que reducir la sensibilidad, con objetos del tipo metales o lquidos. 5) Qu tipo de sensor tiene mayor alcance de deteccin un sensor inductivo o un capacitivo, explique. Para sensores Inductivos, la distancia de sensado (Sn) especificada en la hoja de datos de un sensor inductivo est basada en un objeto de estndar con medidas de 1" x 1" de hierro dulce. Este valor variar sensiblemente si se quiere detectar otros tipos de metales, incluso con materiales ferrosos como el acero inoxidable (SS). Para otros no ferroros, como el aluminio, pueden ser detectados, pero a menores distancias. En el siguiente grfico se puede ver como vara la distancia de deteccin en funcin del material a detectar y el tamao del mismo.
Debido a las limitaciones de los campos magnticos, los sensores inductivos tienen una distancia de deteccin pequea comparados con otros tipos de sensores. Esta distancia puede variar, en funcin del tipo de sensor inductivo, desde fracciones de milmetros hasta 40 mm en promedio. JUAN CARLOS MATOS CANCHO Pgina 9
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
6) Es determinante el dimetro de un sensor (tanto inductivo como capacitivo) en una aplicacin determinada.
Sensor Inductivo: Si, porque la superficie del objeto a detectar no debe ser menor que el dimetro del sensor de proximidad (preferentemente 2 veces ms grande que el tamao o dimetro del sensor). Si fuera menor que el 50% del dimetro del sensor, la distancia de deteccin disminuye sustancialmente. Sensor Capacitivo: Entre los inconvenientes se encuentra el alcance, dependiendo del dimetro del sensor, puede alcanzar hasta los 60mm, igual que la modalidad inductiva.
7) Que podra decir usted con respecto a colocar un sensor (tanto inductivo como capacitivo) enrasado o no enrasado, explique. Sensor Inductivo: Posibilidad de montar los sensores tanto enrasados como no enrasados.
8) La velocidad con la que un material cualquiera ingresa y sale de la zona de activacin del sensor inductivo o capacitivo es irrelevante El tiempo de deteccin si es importante ya que dichos sensores requieren un tiempo para deteccin de cualquier objeto.
9) Diga usted sus conclusiones de estas experiencias. Se puede usar sensores inductivos o capacitivos para sensar objetos similares pero con sus respectivas limitaciones para cada caso, es importante el tamao del sensor el cual es influye en la distancia de censado.
JUAN CARLOS MATOS CANCHO
Pgina 10
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
LABORATORIO N 02 SENSORES DE ULTRASONIDO, PRESION Y TEMPERATURA1. OBJETIVO
El objetivo del presente laboratorio es conocer y experimentar el funcionamiento de los sensores de ultrasonido, presin y temperatura, as como tambin tener un concepto claro de lo que es un sensor/transmisor proporcional con seal de salida de 4 20 mA, adicionalmente a prendera a seleccionar y dimensionar dichos instrumentos para otras aplicaciones, en estas experiencias se utilizaran equipos adicionales para poder obtener con xito los resultados.
2. PROCEDIMIENTO 2.1 SENSOR ULTRASONICO En esta primera parte del laboratorio observar el funcionamiento del dispositivo ultrasnico y llenar la siguiente tabla. SENSOR ULTRASONICO RANGO 10-50cm/4-20mA UNIDAD CORRIENTE Tabla 1 MEDI % 0 25 50 75 100MED(mm) TEORICO MED(mA) TEORICOMEDICION ASCENDENTE (m/A) Error Ascendente (m/A) MEDICION DESCENDENTE (m/A) Error Descendente (m/A)
ITEM 1 2 3 4 5
Histresis
100 200 300 400 500
4 8 12 16 20
3.73 7.94 12.04 15.72 19.40
0.27 0.06 0.04 0.28 0.60
3.75 7.80 11.88 15.71 19.37
0.25 0.20 0.12 0.29 0.63
0.02 0.14 0.16 0.01 0.03
JUAN CARLOS MATOS CANCHO
Pgina 11
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
2.2 SENSOR DE PRESION En esta parte del laboratorio llenar las siguientes tablas segn los datos tomados de la experiencia. SDE - 10 -10V/20mA 19562 RANGO 0-6 bar UNIDAD VOLTAJE Tabla 2 MEDI % 0 25 50 75 100MED(bar) TEORICO MED(V) TEORICOMEDICION ASCENDENTE (Volt) Error Ascendente (Volt) MEDICION DESCENDENTE (Volt) Error Descendente (Volt)
ITEM 1 2 3 4 5
Histresis
0.000 1.375 2.750 4.125 5.500
0.000 1.375 2.750 4.125 5.500
0.475 1.498 2.897 4.280 5.500
0.475 0.123 0.147 0.155 0.000
0.475 1.475 2.837 4.210 5.470
0.475 0.100 0.087 0.085 0.030
0.000 0.023 0.060 0.070 0.030
SDE - 10 -10V/20mA 9562 RANGO 0-6 bar UNIDAD CORRIENTE
Tabla 3
ITEM 1 2 3 4 5
MEDI % 0 25 50 75 100
MED(bar) TEORICO
MED(mA) TEORICO
MEDICION ASCENDENTE (mA)
Error Ascendente (mA)
MEDICION DESCENDENTE (mA)
Error Descendente (mA)
Histresis
0.000 1.375 2.750 4.125 5.500
0.00 2.75 5.50 8.25 11.00
0.94 2.78 5.78 8.43 10.50
0.94 0.03 0.28 0.18 0.50
0.86 2.64 5.78 8.43 10.51
0.86 0.11 0.28 0.18 0.49
0.08 0.14 0.00 0.00 0.01
JUAN CARLOS MATOS CANCHO
Pgina 12
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
SDE - 10 -5V/20mA 19563 RANGO 0-6 bar UNIDAD VOLTAJE Tabla 4ITEM 1 2 3 4 5
MEDI % 0 25 50 75 100
MED(bar) TEORICO
MEDICION MED(V) ASCENDENTE TEORICO (Volt)
Error Ascendente (Volt)
MEDICION DESCENDENTE (Volt)
Error Descendente (Volt)
Histresis
0.000 1.375 2.750 4.125 5.500
1.00 1.55 2.10 2.65 3.20
0.000 1.557 2.103 2.644 3.108
1.000 0.007 0.003 0.006 0.092
0.000 1.559 2.107 2.652 3.106
1.000 0.009 0.007 0.002 0.094
0.000 0.002 0.004 0.008 0.002
SDE - 10 -5V/20mA 19563 RANGO 0-6 bar UNIDAD CORRIENTE Tabla 5ITEM 1 2 3 4 5
MEDI % 0 25 50 75 100
MED(bar) TEORICO
MED(mA) TEORICO
MEDICION ASCENDENTE (mA)
Error Ascendente (mA)
MEDICION DESCENDENTE (mA)
Error Descendente (mA)
Histresis
0.000 1.375 2.750 4.125 5.500
4.00 6.20 8.20 10.60 12.80
4.02 6.22 8.30 10.60 12.79
0.02 0.02 0.10 0.00 0.01
4.02 6.20 8.40 10.57 12.79
0.02 0.00 0.20 0.03 0.01
0.00 0.02 0.10 0.03 0.00
JUAN CARLOS MATOS CANCHO
Pgina 13
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
INFORME FINALPara la realizacin del informe, el alumno tendr en cuenta las hojas de laboratorio as como las observaciones que se tuvo al momento de realizar las experiencias, as mismo dicho informe debe contener lo siguiente: 1. Analice los valores tomados en la tabla 1 a 6 y grafique la histresis en cada uno de ellos. Tabla 1 SENSOR ULTRASONICO RANGO 10-50cm/4-20mA UNIDAD CORRIENTE
Curva de Histeresis20.00 Medicin (mmA) 15.00 10.00 5.00 0.00 0 25 50 % 75 100
Ascendente Descendente
Tabla 2 SDE - 10 -10V/20mA 19562 RANGO 0-6 bar UNIDAD VOLTAJE
Curva de Histeresis6.000 5.000 Medicin (Vol) 4.000 3.000 2.000 1.000 0.000 0 25 50 % 75 100Ascendente Descendente
JUAN CARLOS MATOS CANCHO
Pgina 14
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
Tabla 3 SDE - 10 -10V/20mA 9562 RANGO 0-6 bar UNIDAD CORRIENTE
Curva de Histeresis12.00 9.00 6.00 3.00 0.00 0 25 50 % 75 100
Medicin (mA)
Ascendente Descendente
Tabla 4 SDE - 10 -5V/20mA 19563 RANGO 0-6 bar UNIDAD VOLTAJE
Curva de Histeresis3.500 3.000 Medicin (Vol) 2.500 2.000 1.500 1.000 0.500 0.000 0 25 50 % 75 100Ascendente Descendente
JUAN CARLOS MATOS CANCHO
Pgina 15
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
Tabla 5 SDE - 10 -5V/20mA 19563 RANGO 0-6 bar UNIDAD CORRIENTE
Curva de Histeresis14.00 11.00 8.00 5.00 2.00 0 25 50 % 75 100
Medicin (mA)
Ascendente Descendente
2. Indique usted sus comentarios con respecto a los datos tomados en la tabla 1 a 6 Cuando se toman los datos en la calibracin de un instrumento, estos se hacen con los datos se subida y de bajada, al representar grficamente tendremos la representacin de dos curvas de salida, una de subida y otra de bajada, idealmente deberan ser iguales ambas curvas, a la diferencia entre estas dos curvas se llama histresis.
JUAN CARLOS MATOS CANCHO
Pgina 16
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
En nuestras experiencias vemos grficamente que esto se cumple a excepcin de la grafica Histresis 4, en la que no cumple, lo ms probable es que se haya tomado datos equivocados por nosotros.
3. Diga usted sus conclusiones de estas experiencias. Viendo las curvas de histresis para cada medicin que se hiso con diferentes sensores, notamos que se cumple lo sostenido tericamente que al medir de forma ascendente y luego descendente existe una diferencia el cual se le denomina histresis.
JUAN CARLOS MATOS CANCHO
Pgina 17
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
Anexos: Fotos de laboratorios realizados.
JUAN CARLOS MATOS CANCHO
Pgina 18
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
JUAN CARLOS MATOS CANCHO
Pgina 19
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
JUAN CARLOS MATOS CANCHO
Pgina 20
SENSORICA INDUSTRIAL
CENTRO DE AUTOMATIZACION INDUSTRIAL FIIS - UNI
JUAN CARLOS MATOS CANCHO
Pgina 21