Laboratorio Remoto de Máquinas Eléctricas
5
COMO PUEDE TRABAJAR UN PLC EN UNA EMPRESA Laboratorio remoto de máquinas eléctricas Pensando en que en el curso académico 2011-2012 iban a coincidir dos promociones (los graduados en Ing. Civil y Territorial y los Ing. de Caminos, Canales y Puertos) en el laboratorio, se pensó en aprovechar mejor los recursos disponibles y tratar de hacer accesibles todas las prácticas de laboratorio de forma remota. Para ello, se debía realizar una práctica piloto, donde se evaluasen las ventajas (e inconvenientes) de este tipo de plataformas y por ello, se solicitó ayuda al Rectorado a través del programa de Innovación Educativa. El proyecto comenzó en septiembre de 2009. En vista de las prácticas que se realizaban en esos momentos, la práctica más visual era la de arranque de motores asíncronos. Inicialmente, se montó un puesto específico de prácticas en el laboratorio de máquinas eléctricas, donde se hizo un acopio del material disponible en ese momento (motor, contactores, relés térmicos, autómata programable, etc.) y se comenzó a programar el autómata para que, en función de una serie de entradas digitales, se pudiese seleccionar un determinado tipo de arranque. El autómata escogido fue un Siemens S7-200 CPU 224 del que se disponía algunas unidades, tratando de mantener los costes del proyecto lo más bajo posible. En la figura 2 se muestra el esquema de conexión del autómata a los distintos contactores.
description
Maquinarias remotas con plc
Transcript of Laboratorio Remoto de Máquinas Eléctricas

COMO PUEDE TRABAJAR UN PLC EN UNA EMPRESA Laboratorio remoto de máquinas eléctricas
Pensando en que en el curso académico 2011-2012 iban a coincidir dos promociones (los graduados en Ing. Civil y Territorial y los Ing. de Caminos, Canales y Puertos) en el laboratorio, se pensó en aprovechar mejor los recursos disponibles y tratar de hacer accesibles todas las prácticas de laboratorio de forma remota.
Para ello, se debía realizar una práctica piloto, donde se evaluasen las ventajas (e inconvenientes) de este tipo de plataformas y por ello, se solicitó ayuda al Rectorado a través del programa de Innovación Educativa. El proyecto comenzó en septiembre de 2009.
En vista de las prácticas que se realizaban en esos momentos, la práctica más visual era la de arranque de motores asíncronos.
Inicialmente, se montó un puesto específico de prácticas en el laboratorio de máquinas eléctricas, donde se hizo un acopio del material disponible en ese momento (motor, contactores, relés térmicos, autómata programable, etc.) y se comenzó a programar el autómata para que, en función de una serie de entradas digitales, se pudiese seleccionar un determinado tipo de arranque.
El autómata escogido fue un Siemens S7-200 CPU 224 del que se disponía algunas unidades, tratando de mantener los costes del proyecto lo más bajo posible.
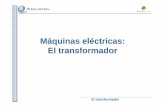
En la figura 2 se muestra el esquema de conexión del autómata a los distintos contactores.
Figura 2. Conexión PLC-Motor y contactores.

Una vez comprobada la parte de control de la planta, se procedió a desarrollar la parte del laboratorio remoto. Se estuvieron analizando distintas opciones y finalmente se escogió como elemento central un sistema autónomo de grabación de vídeo digital que graba en tiempo real las imágenes captadas por 4 cámaras. Este sistema dispone de un servidor WEB de forma que el contenido de las cámaras es fácilmente accesible a través de un navegador convencional a través de una página web (se recomienda Internet Explorer versión 8 y es necesario instalar un ActiveX cuando se carga la página!).
Además, el sistema dispone de 4 entradas de audio y una salida, permitiendo establecer una comunicación en tiempo real entre los alumnos del laboratorio remoto y los alumnos que están realizando la práctica de laboratorio desde la Escuela, evitando así posibles situaciones peligrosas.
Por último, este dispositivo, dispone también de cuatro entradas y salidas digitales (tipo relé) que se utilizan para comunicarse con el autómata programable y seleccionar la parte de la práctica que se desea llevar a cabo.
En la figura 3 se muestra el esquema completo implementado en el laboratorio.

Figura 3. Esquema hardware de la práctica remota diseñada.
La configuración hardware del equipo del servidor de vídeo digital fue la siguiente:
1. Conexión a una red LAN a través de un router.2. Conexión de las cuatro entradas de vídeo digital disponibles. Cada una de las
cámaras graba la imagen de distintas partes del ensayo (motor, autómata, amperímetro analógico y regulador de velocidad).
3. Se conectó también un altavoz y un micrófono para la comunicación audio bidireccional entre el laboratorio y el usuario remoto. Fue muy útil para comunicarnos entre nosotros durante la fase de pruebas y puesta en marcha.
4. Las salidas digitales (tipo relé) del equipo se conectaron a las entradas digitales del autómata utilizando una fuente de alimentación de +24 V c.c.
En la figura 4 se muestra el esquema de conexión de este equipo.
Figura 4. Esquema de conexión del servidor Web.
Una vez realizadas todas las conexiones, se pasó a configurar el servidor, para ello se asignó una dirección IP fija al equipo y también fue necesario abrir una serie de puertos del router, para poder acceder a todas las funcionalidades del dispositivo grabador-servidor web (en particular se abrieron los puertos 80, 5000 y 32001). La puesta en marcha del servidor fue bastante complicada puesto que las cámaras eran accesibles inicialmente, sólo desde la red de la Escuela y tuvimos que pedir ayuda en repetidas ocasiones al Centro de Cálculo para lograr que se pudiese acceder desde ordenadores exteriores a dicha red.

En cuando a la programación del autómata, se dividió en 5 subrutinas: el programa principal que se encarga de efectuar la selección del tipo de arranque deseado y cuatro subrutinas auxiliares que permiten acceder a la ejecución de cada arranque concreto.
La selección se hacía a través de las cuatro salidas digitales del equipo servidor. Las dos primeras salidas (denominadas I0.0 e I0.1) constituyen las órdenes de arranque y paro. Sí I0.0=1 y I0.1=0, el equipo arranca. Si I0.0=0 e I0.1=1 el equipo está parado. Si I0.0=I0.1=0, el equipo permanece como estaba (parado o arrancado) y si I0.0=I0.1=1, el equipo, por seguridad permanece parado.
La selección de las cuatro prácticas posibles: arranque directo en estrella, arranque directo en triángulo, arranque en estrella con inversión de giro y arranque estrella-triángulo, se realiza con las otras 2 salidas digitales disponibles: I0.2 e I0.3, según la siguiente tabla:
I0.2=I0.3=0. Arranque directo en Estrella.
I0.2=0, I0.3=1. Arranque directo en Triángulo.
I0.2=1, I0.3=0. Arranque directo en Estrella con Inversión de Giro.
I0.3=1, I0.3=1. Arranque Estrella-Triángulo.
En la figura 5 se muestra el código del programa principal.