Introduccion Control de Procesos
83
1 OBJETIVOS DE APRENDIZAJE 1.CONTROLADORES DEL PROCESO Al terminar de estudiar este módulo, el participante debe ser capaz de: Explicar el propósito del control del proceso y cómo se relaciona con las variables importantes del proceso. Dar una definición de los siguientes términos: variable del proceso, punto de referencia, señal de error, controlador, transductor y dispositivo de control. Dibujar un diagrama de bloques sencillo que describe el control manual de una variable del proceso. Describir cómo funciona un lazo de control automático, comparándolo con el control manual. Dar la definición de modulación según se aplica al control de procesos. Explicar de forma general las características del control binario. Explicar de forma general las características del control proporcional. Describir la causa de offset (desbalance) según se aplica al control de procesos. Explicar de forma general las características del control integral y del control proporcional-más-integral (PI). Explicar de forma general las características del control derivado y del control proporcional-más-integral-más-derivado (PID). Explicar de forma general las ventajas del control PI y del control PID. Describir un controlador proporcional y el propósito del control proporcional. Describir un lazo en cascada, o un controlador que opera con un punto de referencia remoto. Explicar el proceso que se usa para afinar un controlador.
description
Control de procesos
Transcript of Introduccion Control de Procesos

1
OBJETIVOS DE APRENDIZAJE
1CONTROLADORES DEL PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar el propoacutesito del control del proceso y coacutemo se relaciona con las variables importantes del proceso
Dar una definicioacuten de los siguientes teacuterminos variable del proceso punto de referencia sentildeal de error controlador transductor y dispositivo de control
Dibujar un diagrama de bloques sencillo que describe el control manual de una variable del proceso
Describir coacutemo funciona un lazo de control automaacutetico comparaacutendolo con el control manual
Dar la definicioacuten de modulacioacuten seguacuten se aplica al control de procesos
Explicar de forma general las caracteriacutesticas del control binario
Explicar de forma general las caracteriacutesticas del control proporcional
Describir la causa de offset (desbalance) seguacuten se aplica al control de procesos
Explicar de forma general las caracteriacutesticas del control integral y del control proporcional-maacutes-integral (PI)
Explicar de forma general las caracteriacutesticas del control derivado y del control proporcional-maacutes-integral-maacutes-derivado (PID)
Explicar de forma general las ventajas del control PI y del control PID
Describir un controlador proporcional y el propoacutesito del control proporcional
Describir un lazo en cascada o un controlador que opera con un punto de referencia remoto
Explicar el proceso que se usa para afinar un controlador
2
INTRODUCCIOacuteN A CONTROL DE PROCESOS
En una planta de procesamiento el material de alimentacioacuten ingresa al proceso y es sujeto a la accioacuten de equipos agrupados en operaciones unitarias Ejemplos de operaciones unitarias incluyen filtros hornos zarandas vibratorias y secadores Cada operacioacuten unitaria altera las propiedades quiacutemicas yo fiacutesicas de los materiales Esto resulta en un producto El producto se entrega luego a otro conjunto de operaciones unitarias para su procesamiento adicional o al usuario final La cantidad y calidad del producto elaborado dependeraacute del control de las variables del proceso Por ejemplo un cicloacuten es una operacioacuten unitaria usada para separar los soacutelidos contenidos en una pulpa en dos fracciones de tamantildeo El tamantildeo promedio de los soacutelidos en las dos fracciones de tamantildeo dependeraacute de la caiacuteda de presioacuten a traveacutes del cicloacuten Tambieacuten dependeraacute de la densidad de la pulpa Estos dos paraacutemetros caiacuteda de presioacuten y densidad de la pulpa son variables del proceso que deben ser controladas Este control dentro de un margen deseado asegura que la fraccioacuten de tamantildeo fina contenga el tamantildeo promedio correcto para el procesamiento adicional El control del proceso tiene el propoacutesito de manejar variables como eacutestas para asegurar que se mantienen dentro del margen deseado
En una planta de procesamiento moderna hay cientos de variables que deben ser controladas estrechamente Si estas variables se desviacutean de los requerimientos del proceso la calidad y cantidad del producto se veraacuten afectadas Control del proceso es el teacutermino usado para describir la accioacuten de mantener las variables del proceso dentro de sus maacutergenes deseados
Algunas definiciones importantes se presentan en Definiciones de control del proceso
DEFINICIONES DE CONTROL DEL PROCESO
Teacutermino Definicioacuten
Variable del proceso
Punto medido en el proceso Ejemplos incluyen nivel temperatura presioacuten flujo y densidad
Punto de referencia
Punto de operacioacuten deseado para la variable del proceso
Sentildeal de error
Diferencia entre el valor medido de una variable del proceso y el punto de referencia
Controlador Dispositivo que compara el valor medido de la variable del proceso con el punto de referencia En modo Automaacutetico el controlador modula una sentildeal de salida que dirige un dispositivo de control para alterar el proceso Esto permite que la variable del
3
proceso se equipare con el punto de referencia En modo Manual la sentildeal de salida del controlador soacutelo cambia si es modificada por el operador
Transductor Dispositivo que recibe un tipo de sentildeal y la transforma en otro tipo Generalmente un transductor se usa para transformar una sentildeal eleacutectrica en una sentildeal neumaacutetica que opera una vaacutelvula de control Se requiere de un transductor soacutelo cuando un tipo de sentildeal necesita ser transformado en otro tipo
Dispositivo de control
Dispositivo que altera el proceso y que por lo tanto puede cambiar la medicioacuten de la variable del proceso Los dispositivos de control maacutes comunes son las vaacutelvulas y los motores eleacutectricos de velocidad variable
Un buen control del proceso constituye una de las claves para la operacioacuten exitosa de una planta Los procesos pueden ser controlados mediante complejos sistemas computacionales Tambieacuten pueden ser controlados mediante el criterio y accionar personal del operador Sin embargo de cualquier manera el eacutexito de la operacioacuten dependeraacute del esfuerzo de control del proceso
4
CONTROL AUTOMAacuteTICO
Un mejoramiento del control manual seraacute la eliminacioacuten del factor humano en el esquema de control Para hacerlo puede usarse un controlador automaacutetico El controlador automaacutetico es un dispositivo que compara automaacuteticamente la variable del proceso con un punto de referencia o valor deseado Luego sobre la base del error (la diferencia entre el punto de referencia y la variable del proceso) el controlador enviacutea ajustes automaacuteticos a un dispositivo de control final Estos ajustes fuerzan a la variable del proceso a equiparar el punto de referencia Este enfoque requiere de una conexioacuten entre el dispositivo sensible el controlador y el dispositivo de control Estas conexiones pueden ser viacutea cable eleacutectrico tuberiacutea de aire para instrumentos sentildeales radiales o impulsos luminosos a traveacutes de fibras de plaacutestico transparente (fibras oacutepticas)
El controlador automaacutetico es raacutepido e incansable Al operar correctamente es capaz de realizar la comparacioacuten muy raacutepidamente Jamaacutes comete un error al leer un indicador o reconocer una sentildeal de un sensor La conexioacuten entre el sensor de variable del proceso y el controlador hace la comunicacioacuten y accioacuten virtualmente instantaacuteneas El controlador generalmente estaacute conectado eleacutectricamente con el dispositivo de control a traveacutes de un dispositivo de transformacioacuten
Todos los dispositivos en un sistema de control de proceso generalmente se conocen como instrumentos La disposicioacuten de los instrumentos y su funcioacuten se ilustran mediante un lazo de control El lazo de control es un diagrama esquemaacutetico del sistema de control del proceso Un ejemplo seraacute un lazo de control baacutesico para controlar el nivel de agua en un tanque
Las flechas en el lazo de control indican la direccioacuten de flujo de las sentildeales de informacioacuten En este ejemplo el flujo de sentildeales comienza con el instrumento LE Eacuteste es el sensor de nivel o elemento El elemento sensible generalmente se ubica cerca de la condicioacuten que estaacute detectando El sensor de nivel enviacutea su sentildeal al instrumento LT el transmisor de nivel El transmisor de nivel calibra la sentildeal del sensor seguacuten un margen estaacutendar La sentildeal eleacutectrica estaacutendar fluctuacutea entre 4 a 20 miliamperios (mA) El transmisor enviacutea la sentildeal estaacutendar resultante al instrumento LC el controlador de nivel
El controlador de nivel tiene un punto de referencia que generalmente es ingresado por un operador El punto de referencia representa el nivel deseado en el tanque La diferencia entre el punto de referencia y la sentildeal de nivel real recibida desde el transmisor es el error El controlador intenta corregir el error calculando el tamantildeo del error y enviando una sentildeal de ajuste conocida como la salida al instrumento LY el transductor de nivel El transductor de nivel transforma la sentildeal de salida eleacutectrica de 4 a 20 mA del controlador en una sentildeal neumaacutetica (aire) apropiada para mover el actuador en la vaacutelvula
5
Cuando la vaacutelvula se abre parcialmente se admite maacutes agua en el tanque Esto hace que el nivel real aumente gradualmente hasta el nivel del punto de referencia Este aumento de nivel elimina el error detectado por el controlador Cuando la vaacutelvula se cierra parcialmente se admite menos agua en el tanque Esto hace que el nivel real disminuya gradualmente hasta el nivel del punto de referencia eliminando el error El proceso de cambiar continuamente el caudal de agua hacia el tanque se denomina modulacioacuten
La ilustracioacuten Placa frontal arriba muestra un controlador de proceso DCS tiacutepicomdashen este caso un controlador de presioacuten El pequentildeo triaacutengulo lateral a la derecha de la barra vertical es el punto de referencia El valor del punto de referencia tambieacuten se muestra en la ventana a la derecha del triaacutengulo de punto de referencia Puede ser ajustado por el operador usando los botones arriba y abajo en la parte inferior izquierda de la barra vertical El relleno de la barra vertical (verde) indica el valor de la variable del proceso que estaacuten siendo controlada El valor tambieacuten se muestra en la ventana superior izquierda de la barra vertical En el ejemplo es presioacuten (3910PIC3104) Cuando el triaacutengulo de punto de referencia es equivalente a la variable del proceso no hay diferencia o error En el ejemplo ambos equivalen a 500 kPag (kilo Pascales de presioacuten manomeacutetrica) Los botones AUTO y MAN permiten al operador poner el controlador en modo Automaacutetico o modo Manual En modo Automaacutetico el
6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

2
INTRODUCCIOacuteN A CONTROL DE PROCESOS
En una planta de procesamiento el material de alimentacioacuten ingresa al proceso y es sujeto a la accioacuten de equipos agrupados en operaciones unitarias Ejemplos de operaciones unitarias incluyen filtros hornos zarandas vibratorias y secadores Cada operacioacuten unitaria altera las propiedades quiacutemicas yo fiacutesicas de los materiales Esto resulta en un producto El producto se entrega luego a otro conjunto de operaciones unitarias para su procesamiento adicional o al usuario final La cantidad y calidad del producto elaborado dependeraacute del control de las variables del proceso Por ejemplo un cicloacuten es una operacioacuten unitaria usada para separar los soacutelidos contenidos en una pulpa en dos fracciones de tamantildeo El tamantildeo promedio de los soacutelidos en las dos fracciones de tamantildeo dependeraacute de la caiacuteda de presioacuten a traveacutes del cicloacuten Tambieacuten dependeraacute de la densidad de la pulpa Estos dos paraacutemetros caiacuteda de presioacuten y densidad de la pulpa son variables del proceso que deben ser controladas Este control dentro de un margen deseado asegura que la fraccioacuten de tamantildeo fina contenga el tamantildeo promedio correcto para el procesamiento adicional El control del proceso tiene el propoacutesito de manejar variables como eacutestas para asegurar que se mantienen dentro del margen deseado
En una planta de procesamiento moderna hay cientos de variables que deben ser controladas estrechamente Si estas variables se desviacutean de los requerimientos del proceso la calidad y cantidad del producto se veraacuten afectadas Control del proceso es el teacutermino usado para describir la accioacuten de mantener las variables del proceso dentro de sus maacutergenes deseados
Algunas definiciones importantes se presentan en Definiciones de control del proceso
DEFINICIONES DE CONTROL DEL PROCESO
Teacutermino Definicioacuten
Variable del proceso
Punto medido en el proceso Ejemplos incluyen nivel temperatura presioacuten flujo y densidad
Punto de referencia
Punto de operacioacuten deseado para la variable del proceso
Sentildeal de error
Diferencia entre el valor medido de una variable del proceso y el punto de referencia
Controlador Dispositivo que compara el valor medido de la variable del proceso con el punto de referencia En modo Automaacutetico el controlador modula una sentildeal de salida que dirige un dispositivo de control para alterar el proceso Esto permite que la variable del
3
proceso se equipare con el punto de referencia En modo Manual la sentildeal de salida del controlador soacutelo cambia si es modificada por el operador
Transductor Dispositivo que recibe un tipo de sentildeal y la transforma en otro tipo Generalmente un transductor se usa para transformar una sentildeal eleacutectrica en una sentildeal neumaacutetica que opera una vaacutelvula de control Se requiere de un transductor soacutelo cuando un tipo de sentildeal necesita ser transformado en otro tipo
Dispositivo de control
Dispositivo que altera el proceso y que por lo tanto puede cambiar la medicioacuten de la variable del proceso Los dispositivos de control maacutes comunes son las vaacutelvulas y los motores eleacutectricos de velocidad variable
Un buen control del proceso constituye una de las claves para la operacioacuten exitosa de una planta Los procesos pueden ser controlados mediante complejos sistemas computacionales Tambieacuten pueden ser controlados mediante el criterio y accionar personal del operador Sin embargo de cualquier manera el eacutexito de la operacioacuten dependeraacute del esfuerzo de control del proceso
4
CONTROL AUTOMAacuteTICO
Un mejoramiento del control manual seraacute la eliminacioacuten del factor humano en el esquema de control Para hacerlo puede usarse un controlador automaacutetico El controlador automaacutetico es un dispositivo que compara automaacuteticamente la variable del proceso con un punto de referencia o valor deseado Luego sobre la base del error (la diferencia entre el punto de referencia y la variable del proceso) el controlador enviacutea ajustes automaacuteticos a un dispositivo de control final Estos ajustes fuerzan a la variable del proceso a equiparar el punto de referencia Este enfoque requiere de una conexioacuten entre el dispositivo sensible el controlador y el dispositivo de control Estas conexiones pueden ser viacutea cable eleacutectrico tuberiacutea de aire para instrumentos sentildeales radiales o impulsos luminosos a traveacutes de fibras de plaacutestico transparente (fibras oacutepticas)
El controlador automaacutetico es raacutepido e incansable Al operar correctamente es capaz de realizar la comparacioacuten muy raacutepidamente Jamaacutes comete un error al leer un indicador o reconocer una sentildeal de un sensor La conexioacuten entre el sensor de variable del proceso y el controlador hace la comunicacioacuten y accioacuten virtualmente instantaacuteneas El controlador generalmente estaacute conectado eleacutectricamente con el dispositivo de control a traveacutes de un dispositivo de transformacioacuten
Todos los dispositivos en un sistema de control de proceso generalmente se conocen como instrumentos La disposicioacuten de los instrumentos y su funcioacuten se ilustran mediante un lazo de control El lazo de control es un diagrama esquemaacutetico del sistema de control del proceso Un ejemplo seraacute un lazo de control baacutesico para controlar el nivel de agua en un tanque
Las flechas en el lazo de control indican la direccioacuten de flujo de las sentildeales de informacioacuten En este ejemplo el flujo de sentildeales comienza con el instrumento LE Eacuteste es el sensor de nivel o elemento El elemento sensible generalmente se ubica cerca de la condicioacuten que estaacute detectando El sensor de nivel enviacutea su sentildeal al instrumento LT el transmisor de nivel El transmisor de nivel calibra la sentildeal del sensor seguacuten un margen estaacutendar La sentildeal eleacutectrica estaacutendar fluctuacutea entre 4 a 20 miliamperios (mA) El transmisor enviacutea la sentildeal estaacutendar resultante al instrumento LC el controlador de nivel
El controlador de nivel tiene un punto de referencia que generalmente es ingresado por un operador El punto de referencia representa el nivel deseado en el tanque La diferencia entre el punto de referencia y la sentildeal de nivel real recibida desde el transmisor es el error El controlador intenta corregir el error calculando el tamantildeo del error y enviando una sentildeal de ajuste conocida como la salida al instrumento LY el transductor de nivel El transductor de nivel transforma la sentildeal de salida eleacutectrica de 4 a 20 mA del controlador en una sentildeal neumaacutetica (aire) apropiada para mover el actuador en la vaacutelvula
5
Cuando la vaacutelvula se abre parcialmente se admite maacutes agua en el tanque Esto hace que el nivel real aumente gradualmente hasta el nivel del punto de referencia Este aumento de nivel elimina el error detectado por el controlador Cuando la vaacutelvula se cierra parcialmente se admite menos agua en el tanque Esto hace que el nivel real disminuya gradualmente hasta el nivel del punto de referencia eliminando el error El proceso de cambiar continuamente el caudal de agua hacia el tanque se denomina modulacioacuten
La ilustracioacuten Placa frontal arriba muestra un controlador de proceso DCS tiacutepicomdashen este caso un controlador de presioacuten El pequentildeo triaacutengulo lateral a la derecha de la barra vertical es el punto de referencia El valor del punto de referencia tambieacuten se muestra en la ventana a la derecha del triaacutengulo de punto de referencia Puede ser ajustado por el operador usando los botones arriba y abajo en la parte inferior izquierda de la barra vertical El relleno de la barra vertical (verde) indica el valor de la variable del proceso que estaacuten siendo controlada El valor tambieacuten se muestra en la ventana superior izquierda de la barra vertical En el ejemplo es presioacuten (3910PIC3104) Cuando el triaacutengulo de punto de referencia es equivalente a la variable del proceso no hay diferencia o error En el ejemplo ambos equivalen a 500 kPag (kilo Pascales de presioacuten manomeacutetrica) Los botones AUTO y MAN permiten al operador poner el controlador en modo Automaacutetico o modo Manual En modo Automaacutetico el
6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
3
proceso se equipare con el punto de referencia En modo Manual la sentildeal de salida del controlador soacutelo cambia si es modificada por el operador
Transductor Dispositivo que recibe un tipo de sentildeal y la transforma en otro tipo Generalmente un transductor se usa para transformar una sentildeal eleacutectrica en una sentildeal neumaacutetica que opera una vaacutelvula de control Se requiere de un transductor soacutelo cuando un tipo de sentildeal necesita ser transformado en otro tipo
Dispositivo de control
Dispositivo que altera el proceso y que por lo tanto puede cambiar la medicioacuten de la variable del proceso Los dispositivos de control maacutes comunes son las vaacutelvulas y los motores eleacutectricos de velocidad variable
Un buen control del proceso constituye una de las claves para la operacioacuten exitosa de una planta Los procesos pueden ser controlados mediante complejos sistemas computacionales Tambieacuten pueden ser controlados mediante el criterio y accionar personal del operador Sin embargo de cualquier manera el eacutexito de la operacioacuten dependeraacute del esfuerzo de control del proceso
4
CONTROL AUTOMAacuteTICO
Un mejoramiento del control manual seraacute la eliminacioacuten del factor humano en el esquema de control Para hacerlo puede usarse un controlador automaacutetico El controlador automaacutetico es un dispositivo que compara automaacuteticamente la variable del proceso con un punto de referencia o valor deseado Luego sobre la base del error (la diferencia entre el punto de referencia y la variable del proceso) el controlador enviacutea ajustes automaacuteticos a un dispositivo de control final Estos ajustes fuerzan a la variable del proceso a equiparar el punto de referencia Este enfoque requiere de una conexioacuten entre el dispositivo sensible el controlador y el dispositivo de control Estas conexiones pueden ser viacutea cable eleacutectrico tuberiacutea de aire para instrumentos sentildeales radiales o impulsos luminosos a traveacutes de fibras de plaacutestico transparente (fibras oacutepticas)
El controlador automaacutetico es raacutepido e incansable Al operar correctamente es capaz de realizar la comparacioacuten muy raacutepidamente Jamaacutes comete un error al leer un indicador o reconocer una sentildeal de un sensor La conexioacuten entre el sensor de variable del proceso y el controlador hace la comunicacioacuten y accioacuten virtualmente instantaacuteneas El controlador generalmente estaacute conectado eleacutectricamente con el dispositivo de control a traveacutes de un dispositivo de transformacioacuten
Todos los dispositivos en un sistema de control de proceso generalmente se conocen como instrumentos La disposicioacuten de los instrumentos y su funcioacuten se ilustran mediante un lazo de control El lazo de control es un diagrama esquemaacutetico del sistema de control del proceso Un ejemplo seraacute un lazo de control baacutesico para controlar el nivel de agua en un tanque
Las flechas en el lazo de control indican la direccioacuten de flujo de las sentildeales de informacioacuten En este ejemplo el flujo de sentildeales comienza con el instrumento LE Eacuteste es el sensor de nivel o elemento El elemento sensible generalmente se ubica cerca de la condicioacuten que estaacute detectando El sensor de nivel enviacutea su sentildeal al instrumento LT el transmisor de nivel El transmisor de nivel calibra la sentildeal del sensor seguacuten un margen estaacutendar La sentildeal eleacutectrica estaacutendar fluctuacutea entre 4 a 20 miliamperios (mA) El transmisor enviacutea la sentildeal estaacutendar resultante al instrumento LC el controlador de nivel
El controlador de nivel tiene un punto de referencia que generalmente es ingresado por un operador El punto de referencia representa el nivel deseado en el tanque La diferencia entre el punto de referencia y la sentildeal de nivel real recibida desde el transmisor es el error El controlador intenta corregir el error calculando el tamantildeo del error y enviando una sentildeal de ajuste conocida como la salida al instrumento LY el transductor de nivel El transductor de nivel transforma la sentildeal de salida eleacutectrica de 4 a 20 mA del controlador en una sentildeal neumaacutetica (aire) apropiada para mover el actuador en la vaacutelvula
5
Cuando la vaacutelvula se abre parcialmente se admite maacutes agua en el tanque Esto hace que el nivel real aumente gradualmente hasta el nivel del punto de referencia Este aumento de nivel elimina el error detectado por el controlador Cuando la vaacutelvula se cierra parcialmente se admite menos agua en el tanque Esto hace que el nivel real disminuya gradualmente hasta el nivel del punto de referencia eliminando el error El proceso de cambiar continuamente el caudal de agua hacia el tanque se denomina modulacioacuten
La ilustracioacuten Placa frontal arriba muestra un controlador de proceso DCS tiacutepicomdashen este caso un controlador de presioacuten El pequentildeo triaacutengulo lateral a la derecha de la barra vertical es el punto de referencia El valor del punto de referencia tambieacuten se muestra en la ventana a la derecha del triaacutengulo de punto de referencia Puede ser ajustado por el operador usando los botones arriba y abajo en la parte inferior izquierda de la barra vertical El relleno de la barra vertical (verde) indica el valor de la variable del proceso que estaacuten siendo controlada El valor tambieacuten se muestra en la ventana superior izquierda de la barra vertical En el ejemplo es presioacuten (3910PIC3104) Cuando el triaacutengulo de punto de referencia es equivalente a la variable del proceso no hay diferencia o error En el ejemplo ambos equivalen a 500 kPag (kilo Pascales de presioacuten manomeacutetrica) Los botones AUTO y MAN permiten al operador poner el controlador en modo Automaacutetico o modo Manual En modo Automaacutetico el
6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
4
CONTROL AUTOMAacuteTICO
Un mejoramiento del control manual seraacute la eliminacioacuten del factor humano en el esquema de control Para hacerlo puede usarse un controlador automaacutetico El controlador automaacutetico es un dispositivo que compara automaacuteticamente la variable del proceso con un punto de referencia o valor deseado Luego sobre la base del error (la diferencia entre el punto de referencia y la variable del proceso) el controlador enviacutea ajustes automaacuteticos a un dispositivo de control final Estos ajustes fuerzan a la variable del proceso a equiparar el punto de referencia Este enfoque requiere de una conexioacuten entre el dispositivo sensible el controlador y el dispositivo de control Estas conexiones pueden ser viacutea cable eleacutectrico tuberiacutea de aire para instrumentos sentildeales radiales o impulsos luminosos a traveacutes de fibras de plaacutestico transparente (fibras oacutepticas)
El controlador automaacutetico es raacutepido e incansable Al operar correctamente es capaz de realizar la comparacioacuten muy raacutepidamente Jamaacutes comete un error al leer un indicador o reconocer una sentildeal de un sensor La conexioacuten entre el sensor de variable del proceso y el controlador hace la comunicacioacuten y accioacuten virtualmente instantaacuteneas El controlador generalmente estaacute conectado eleacutectricamente con el dispositivo de control a traveacutes de un dispositivo de transformacioacuten
Todos los dispositivos en un sistema de control de proceso generalmente se conocen como instrumentos La disposicioacuten de los instrumentos y su funcioacuten se ilustran mediante un lazo de control El lazo de control es un diagrama esquemaacutetico del sistema de control del proceso Un ejemplo seraacute un lazo de control baacutesico para controlar el nivel de agua en un tanque
Las flechas en el lazo de control indican la direccioacuten de flujo de las sentildeales de informacioacuten En este ejemplo el flujo de sentildeales comienza con el instrumento LE Eacuteste es el sensor de nivel o elemento El elemento sensible generalmente se ubica cerca de la condicioacuten que estaacute detectando El sensor de nivel enviacutea su sentildeal al instrumento LT el transmisor de nivel El transmisor de nivel calibra la sentildeal del sensor seguacuten un margen estaacutendar La sentildeal eleacutectrica estaacutendar fluctuacutea entre 4 a 20 miliamperios (mA) El transmisor enviacutea la sentildeal estaacutendar resultante al instrumento LC el controlador de nivel
El controlador de nivel tiene un punto de referencia que generalmente es ingresado por un operador El punto de referencia representa el nivel deseado en el tanque La diferencia entre el punto de referencia y la sentildeal de nivel real recibida desde el transmisor es el error El controlador intenta corregir el error calculando el tamantildeo del error y enviando una sentildeal de ajuste conocida como la salida al instrumento LY el transductor de nivel El transductor de nivel transforma la sentildeal de salida eleacutectrica de 4 a 20 mA del controlador en una sentildeal neumaacutetica (aire) apropiada para mover el actuador en la vaacutelvula
5
Cuando la vaacutelvula se abre parcialmente se admite maacutes agua en el tanque Esto hace que el nivel real aumente gradualmente hasta el nivel del punto de referencia Este aumento de nivel elimina el error detectado por el controlador Cuando la vaacutelvula se cierra parcialmente se admite menos agua en el tanque Esto hace que el nivel real disminuya gradualmente hasta el nivel del punto de referencia eliminando el error El proceso de cambiar continuamente el caudal de agua hacia el tanque se denomina modulacioacuten
La ilustracioacuten Placa frontal arriba muestra un controlador de proceso DCS tiacutepicomdashen este caso un controlador de presioacuten El pequentildeo triaacutengulo lateral a la derecha de la barra vertical es el punto de referencia El valor del punto de referencia tambieacuten se muestra en la ventana a la derecha del triaacutengulo de punto de referencia Puede ser ajustado por el operador usando los botones arriba y abajo en la parte inferior izquierda de la barra vertical El relleno de la barra vertical (verde) indica el valor de la variable del proceso que estaacuten siendo controlada El valor tambieacuten se muestra en la ventana superior izquierda de la barra vertical En el ejemplo es presioacuten (3910PIC3104) Cuando el triaacutengulo de punto de referencia es equivalente a la variable del proceso no hay diferencia o error En el ejemplo ambos equivalen a 500 kPag (kilo Pascales de presioacuten manomeacutetrica) Los botones AUTO y MAN permiten al operador poner el controlador en modo Automaacutetico o modo Manual En modo Automaacutetico el
6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

5
Cuando la vaacutelvula se abre parcialmente se admite maacutes agua en el tanque Esto hace que el nivel real aumente gradualmente hasta el nivel del punto de referencia Este aumento de nivel elimina el error detectado por el controlador Cuando la vaacutelvula se cierra parcialmente se admite menos agua en el tanque Esto hace que el nivel real disminuya gradualmente hasta el nivel del punto de referencia eliminando el error El proceso de cambiar continuamente el caudal de agua hacia el tanque se denomina modulacioacuten
La ilustracioacuten Placa frontal arriba muestra un controlador de proceso DCS tiacutepicomdashen este caso un controlador de presioacuten El pequentildeo triaacutengulo lateral a la derecha de la barra vertical es el punto de referencia El valor del punto de referencia tambieacuten se muestra en la ventana a la derecha del triaacutengulo de punto de referencia Puede ser ajustado por el operador usando los botones arriba y abajo en la parte inferior izquierda de la barra vertical El relleno de la barra vertical (verde) indica el valor de la variable del proceso que estaacuten siendo controlada El valor tambieacuten se muestra en la ventana superior izquierda de la barra vertical En el ejemplo es presioacuten (3910PIC3104) Cuando el triaacutengulo de punto de referencia es equivalente a la variable del proceso no hay diferencia o error En el ejemplo ambos equivalen a 500 kPag (kilo Pascales de presioacuten manomeacutetrica) Los botones AUTO y MAN permiten al operador poner el controlador en modo Automaacutetico o modo Manual En modo Automaacutetico el
6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

6
controlador ajustaraacute automaacuteticamente la salida para controlar la variable del proceso en el punto de referencia como se describe arriba En modo Manual el operador puede ajustar directamente la salida con los botones izquierda y derecha debajo de la barra horizontal Esto permite al operador mover directamente la vaacutelvula de control sin recurrir al punto de referencia El relleno de la barra horizontal (azul) muestra la sentildeal de salida desde 0 a 100 por ciento La ventana debajo de la barra horizontal tambieacuten muestra el valor de la sentildeal de salida Bajo control directo la vaacutelvula se abre mientras aumenta la salida Por ejemplo la vaacutelvula puede abrirse desde 0 a 100 por ciento a medida que la salida aumenta desde 0 a 100 por ciento Bajo control inverso la vaacutelvula se cierra mientras aumenta la salida Por ejemplo la vaacutelvula puede cerrarse desde 100 a 0 por ciento a medida que la salida aumenta desde 0 a 100 por ciento
Generalmente cada variable del proceso a ser controlada como presioacuten flujo temperatura densidad etc se provee con su propio lazo de control Cada lazo funciona de una manera similar en cuanto hace que un dispositivo de control module para reducir el error Algunos dispositivos se combinan fiacutesicamente Los elementos sensibles y los transmisores los transductores y los actuadores de dispositivos de control a menudo estaacuten combinados Otros pueden estar contenidos en cajas eleacutectricas o electroacutenicas
La funcioacuten de un lazo de control comuacutenmente se ilustra con un diagrama de bloques Por lo general el transductor IP no se muestra en el diagrama de bloques Sin embargo se muestra en el ejemplo de diagrama de bloques para ilustrar doacutende encaja en el lazo
DIAGRAMA DE BLOQUES
7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

7
CONTROL MANUAL
Cuando un operador controla una variable en forma manualmdashdigamos que mediante una vaacutelvula manual en una tuberiacutea de agua para controlar el nivel en un tanquemdashestamos frente al tipo de control maacutes simple Este tipo de control se denomina control manual en el campo Consiste en observar una variable del proceso como el nivel de agua y comparar la variable con un valor deseado El operador debe entonces operar un dispositivomdashpor ejemplo una vaacutelvulamdashpara forzar la variable del proceso para que equipare el valor deseado La variable del proceso se monitorea con un dispositivo sensible como un indicador de nivel
Control de nivel manual
En el caso de un tanque de agua la variable del proceso observada es el nivel de agua real en el tanque El nivel real se observa con el ojo humano actuando como dispositivo sensible El nivel deseado puede ser determinado de memoria Tambieacuten puede revisarse usando una marca sobre el costado del tanque o una cinta de medir en el tanque
En este caso simple el cerebro humano es el controlador y la vaacutelvula de operacioacuten manual es el dispositivo de control El cerebro almacena la informacioacuten respecto del nivel deseado y la compara con el nivel real captado por el ojo Si el nivel real es inferior al nivel deseado el cerebro enviacutea una sentildeal al brazo y la manomdashel dispositivo de control El dispositivo de control abre parcialmente la vaacutelvula para admitir maacutes agua en el tanque Si el nivel real excede el nivel deseado el cerebro enviacutea una sentildeal para cerrar parcialmente la vaacutelvula Esto disminuye el flujo de agua hacia el tanque El modo de control puede expresarse con un diagrama de bloques de control del proceso como se muestra
DIAGRAMA DE BLOQUES DE CONTROL HUMANO
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
8
Cuando la descarga desde el tanque es constante se requiere de muy poco esfuerzo de control para mantener el agua al nivel deseado Sin embargo los cambios en la velocidad de descarga obligaraacuten a hacer ajustes en el suministro de agua al tanque En este caso el control manual consumiraacute mucho tiempo y esfuerzo La respuesta a las condiciones cambiantes seraacute muy erraacutetica
El control manual remoto es un mejoramiento de este meacutetodo de control Este enfoque requiere de un dispositivo sensible sin contacto directo en vez del ojo humano Este dispositivo sensible monitorea continuamente el nivel de agua El operador puede observar una presentacioacuten del nivel de agua sobre una pantalla La pantalla puede ubicarse en una sala de control Tambieacuten puede ubicarse sobre un instrumento en el campo Como antes el operador compara el nivel de agua observado remotamente con el nivel deseado (el punto de referencia) El operador luego opera un dispositivo de control remotomdashen este caso una vaacutelvulamdashpara ajustar el flujo de agua hacia el tanque El actuador de la vaacutelvula puede ser operado neumaacutetica hidraacuteulica o eleacutectricamente El actuador abre o cierra parcialmente la vaacutelvula cuando es energizado por el operador
La mayoriacutea de las plantas tienen cientos de variables del proceso Los ejemplos incluyen nivel temperatura flujo presioacuten pH contenido de gas densidad y otros El control manual seriacutea de alto coeficiente de mano de obra sino imposible El control seriacutea erraacutetico
MODOS DE CONTROL
Para que un controlador automaacutetico mantenga una variable del proceso en su punto de referencia debe saber si la variable estaacute en el valor correcto No es suficiente con una respuesta del tipo SIacute o NO el controlador tambieacuten debe saber al menos si el valor de la variable es muy alto o muy bajo
Para un mejor control debe saber cuaacuten muy alto o muy bajo es el valor Eacutesta es la magnitud del error de control Para un control incluso mejor el controlador puede necesitar saber por cuaacutento tiempo ha existido el error Incluso para un mejor control auacuten puede necesitar saber la velocidad a la cual el error estaacute cambiando
Estos sucesivos refinamientos del control definen un conjunto de modos de control Un modo de control es una manera especiacutefica en la cual la entrada de un controlador afecta la salida Los modos de control maacutes comunes son
Control binario
Control proporcional
Control proporcional-maacutes-integral (reposicioacuten)
Control proporcional-maacutes-integral-maacutes-derivado
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
9
A continuacioacuten se presenta una breve descripcioacuten simplificada de cada uno de estos modos de control
Control binario
El control binario tambieacuten conocido como control intermitente y control de dos posiciones es el maacutes simple de todos los modos de control Es el menos adaptable de los tipos de control Sin embargo es completamente adecuado en muchos casos y se usa frecuentemente en las plantas de procesamiento Es el control menos costoso y es el tipo usado frecuentemente en los calefactores caseros para el control de la temperatura
La salida de un controlador binario estaacute On (Conectada) u Off (Desconectada) Su valor depende de los siguientes factores
La direccioacuten del error de control
La accioacuten del controlador directa o inversa
Un componente sumador en el controlador determina la direccioacuten del error de control positiva o negativa En el control binario la diferencia entre el valor de la variable del proceso en cada estado binariomdashel valor de la variable cuando el estado binario justo cambia a On comparado con el estado cuando justo cambia a Offmdashse conoce como la banda de operacioacuten Generalmente en los esquemas de control binario la banda de operacioacuten es pequentildea Un ejemplo de esta pequentildea banda de operacioacuten es el control de temperatura para una casa Sin embargo hay casos donde la banda On-Off o de operacioacuten se hace maacutes grande para minimizar la frecuencia de operacioacuten del equipo tal como una bomba Esto ocurre frecuentemente para el control de nivel de liacutequidos en tanques y sumideros Cuando el tanque estaacute casi lleno el controlador de nivel binario arranca una bomba que opera hasta que el tanque estaacute casi vaciacuteo Luego el controlador para la bomba y la secuencia se repite despueacutes que el tanque se llena
El graacutefico muestra una variacioacuten regular en la temperatura medida correspondiente al ciclo On-Off de un ejemplo de controlador de temperatura binario
El control binario es simplemente una accioacuten de conmutacioacuten y el mismo instrumento puede usarse para cualquier otra operacioacuten de conmutacioacuten Por ejemplo puede usarse para operar una alarma Luego el instrumento se identifica como un interruptor (conmutador) o un enclavamiento en vez de un controlador
Casi todos los sistemas de control operan con cargas de proceso variables La carga del proceso es la cantidad de material o energiacutea que debe ser manipulada
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
10
para controlar la variable del proceso La carga depende de si el sistema estaacute operando a plena capacidad o menos que la plena capacidad
El control binario no es el meacutetodo preferido para controlar un proceso continuo Es incapaz de mantener la variable del proceso controlada dentro de una banda de operacioacuten dada por maacutes de una carga de proceso Con otras cargas la banda se hace maacutes grande o maacutes pequentildea dependiendo si la carga ha aumentado o disminuido
Control proporcional
El control proporcional tambieacuten conocido como control de modo uacutenico provee una salida modulada que puede tener cualquier valor desde el extremo inferior al superior del margen de sentildeales de salida del controlador El valor dependeraacute de varios factores Estos factores incluyen
La direccioacuten y magnitud del error de control
La ganancia o sensibilidad del controlador
La accioacuten del controlador directa o inversa Bajo control directo el aumento de la salida del controlador abre una vaacutelvula de control una cantidad adicional Bajo control inverso el aumento de la salida del controlador cierra la vaacutelvula una cantidad adicional
Controlador del proceso
Los controladores y procesos como las personas son sensibles en mayor o menor medida Ante un comentario incorrecto ciertas personas pueden experimentar un arrebato de coacutelera Las consideramos muy sensibles Lo mismo dicho a otras personas puede llevarlas a reiacuter o ignorar el comentario Mientras mayor es la sensibilidad mayor es la reaccioacuten ante un estiacutemulo o sentildeal de
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
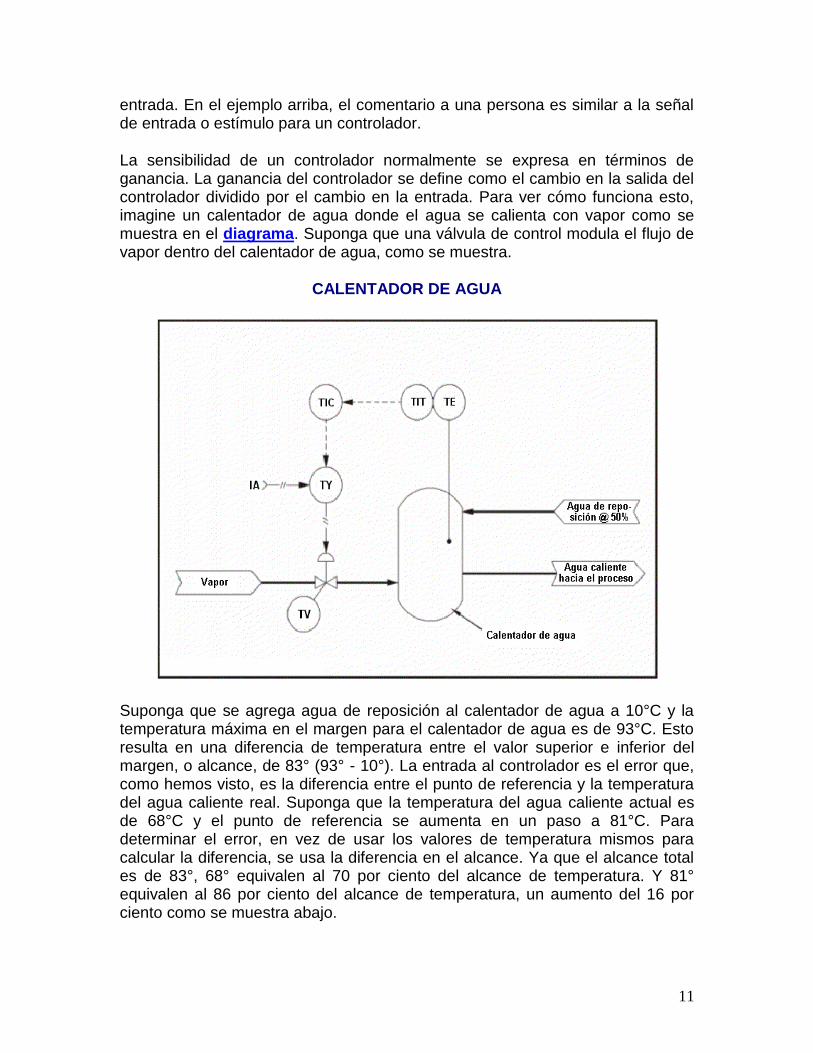
11
entrada En el ejemplo arriba el comentario a una persona es similar a la sentildeal de entrada o estiacutemulo para un controlador
La sensibilidad de un controlador normalmente se expresa en teacuterminos de ganancia La ganancia del controlador se define como el cambio en la salida del controlador dividido por el cambio en la entrada Para ver coacutemo funciona esto imagine un calentador de agua donde el agua se calienta con vapor como se muestra en el diagrama Suponga que una vaacutelvula de control modula el flujo de vapor dentro del calentador de agua como se muestra
CALENTADOR DE AGUA
Suponga que se agrega agua de reposicioacuten al calentador de agua a 10degC y la temperatura maacutexima en el margen para el calentador de agua es de 93degC Esto resulta en una diferencia de temperatura entre el valor superior e inferior del margen o alcance de 83deg (93deg - 10deg) La entrada al controlador es el error que como hemos visto es la diferencia entre el punto de referencia y la temperatura del agua caliente real Suponga que la temperatura del agua caliente actual es de 68degC y el punto de referencia se aumenta en un paso a 81degC Para determinar el error en vez de usar los valores de temperatura mismos para calcular la diferencia se usa la diferencia en el alcance Ya que el alcance total es de 83deg 68deg equivalen al 70 por ciento del alcance de temperatura Y 81deg equivalen al 86 por ciento del alcance de temperatura un aumento del 16 por ciento como se muestra abajo
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
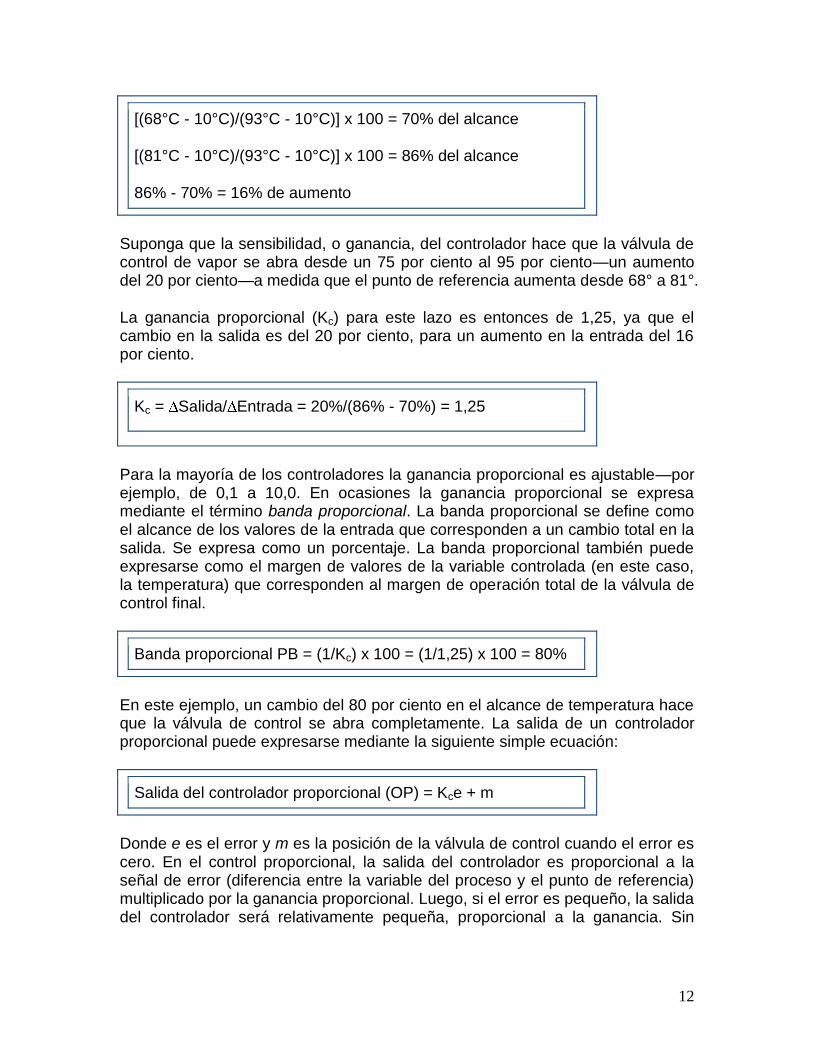
12
[(68degC - 10degC)(93degC - 10degC)] x 100 = 70 del alcance
[(81degC - 10degC)(93degC - 10degC)] x 100 = 86 del alcance
86 - 70 = 16 de aumento
Suponga que la sensibilidad o ganancia del controlador hace que la vaacutelvula de control de vapor se abra desde un 75 por ciento al 95 por cientomdashun aumento del 20 por cientomdasha medida que el punto de referencia aumenta desde 68deg a 81deg
La ganancia proporcional (Kc) para este lazo es entonces de 125 ya que el cambio en la salida es del 20 por ciento para un aumento en la entrada del 16 por ciento
Kc = Salida Entrada = 20(86 - 70) = 125
Para la mayoriacutea de los controladores la ganancia proporcional es ajustablemdashpor ejemplo de 01 a 100 En ocasiones la ganancia proporcional se expresa mediante el teacutermino banda proporcional La banda proporcional se define como el alcance de los valores de la entrada que corresponden a un cambio total en la salida Se expresa como un porcentaje La banda proporcional tambieacuten puede expresarse como el margen de valores de la variable controlada (en este caso la temperatura) que corresponden al margen de operacioacuten total de la vaacutelvula de control final
Banda proporcional PB = (1Kc) x 100 = (1125) x 100 = 80
En este ejemplo un cambio del 80 por ciento en el alcance de temperatura hace que la vaacutelvula de control se abra completamente La salida de un controlador proporcional puede expresarse mediante la siguiente simple ecuacioacuten
Salida del controlador proporcional (OP) = Kce + m
Donde e es el error y m es la posicioacuten de la vaacutelvula de control cuando el error es cero En el control proporcional la salida del controlador es proporcional a la sentildeal de error (diferencia entre la variable del proceso y el punto de referencia) multiplicado por la ganancia proporcional Luego si el error es pequentildeo la salida del controlador seraacute relativamente pequentildea proporcional a la ganancia Sin
13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

13
embargo si el error es grande la salida seraacute proporcionalmente mayor basada en la ganancia
La magnitud de una salida de controlador proporcional puede ajustarse ajustando la ganancia Si se desea una gran respuesta de vaacutelvula ante un pequentildeo cambio en la variable del proceso entonces se necesitaraacute una gran ganancia (banda proporcional estrecha) Si se requiere una pequentildea respuesta de vaacutelvula ante un gran cambio en la variable del proceso entonces se necesitaraacute una ganancia pequentildea (banda proporcional ancha)
El ajuste de ganancia en un sistema de control proporcional es especialmente importante Si la ganancia se ajusta muy baja la accioacuten de la vaacutelvula es lenta y puede hacer que el proceso opere fuera de los liacutemites de control Un ajuste de ganancia alto puede permitir oscilaciones excesivas de la variable del proceso debido a la respuesta amplificada de la vaacutelvula
Suponga que el lazo de control de temperatura del agua caliente estaacute disentildeado de modo que cuando la vaacutelvula de control estaacute un 50 por ciento abierta la temperatura del agua caliente estaacute al 50 por ciento del alcance con cero errores En este caso m = 50 por ciento ya que a cerro error m debe ser equivalente a 05
CARACTERIacuteSTICAS DE UN LAZO DE CONTROL DE TEMPERATURA DE AGUA CALIENTE
14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

14
Note que m estaacute al 50 por ciento del alcance de la vaacutelvula e intersecta la curva al 50 por ciento del alcance de la variable del proceso (temperatura) El lazo estaacute en equilibrio en este punto 52degC
93degC - 10degC = 83deg de alcance
50 del alcance x 83degC = 42degC
42degC + 10degC = 52degC al 50 del alcance de temperatura
Bajo cualquier carga o demanda del proceso distinta al punto de equilibrio un controlador proporcional no puede controlar la variable del proceso en el punto de referencia Por ejemplo suponga que aumenta suacutebitamente la demanda del calentador de agua Esto puede suceder porque se abren las vaacutelvulas de agua caliente en el proceso Si la temperatura del agua caliente ha de mantenerse a 52degC la vaacutelvula de control de vapor debe abrirse adicionalmentemdashmaacutes del 50 por ciento La uacutenica forma en que la posicioacuten de la vaacutelvula puede cambiar es si cambia la salida del controlador lo cual requiere de un error (e) ya que la salida es proporcional al error A medida que disminuye la temperatura en el tanque de agua caliente resultando en un error la vaacutelvula se abriraacute en proporcioacuten al error Sin embargo ya que la carga demandada por el proceso es ahora mayor se requiere de maacutes vapor para mantener la temperatura en comparacioacuten con el antiguo punto de equilibrio El mayor caudal de vapor requiere de un error constante ya que el cambio de la vaacutelvula de control es proporcional al error Este error constante necesario se conoce como desviacioacuten Si no hubiese error la vaacutelvula volveriacutea a su valor original de m una constante con un valor del 50 por ciento en el ejemplo Este valor resultariacutea en la temperatura de punto de referencia bajo la carga de proceso del antiguo equilibrio no del nuevo
CONTROL DE DESVIACIOacuteN
15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

15
El valor de la desviacioacuten dependeraacute de la ganancia proporcional Kc Mayores ganancias produciraacuten menos desviacioacuten sin embargo hay un liacutemite praacutectico para el valor de Kc El lazo puede hacerse instable a una ganancia proporcional muy elevada
Una forma de abordar este problema es ajustando manualmente la constante m Puede obtenerse un nuevo punto de equilibrio moviendo m a un nuevo valor Esto permite que la variable del proceso equipare el punto de referencia bajo las nuevas condiciones de carga del proceso El control integral o de reposicioacuten es un meacutetodo para hacer este ajuste en forma automaacutetica Estaacute disentildeado especiacuteficamente para lidiar con la desviacioacuten
Control proporcional-maacutes-integral (reposicioacuten)
El control proporcional-maacutes-integral tambieacuten se conoce como
Control de dos modos
Control de reposicioacuten automaacutetica
Control flotante
Control PI
De la misma forma que en el controlador proporcional la salida del controlador proporcional-integral (PI) es modulada pero el valor de su salida depende de los siguientes factores
La direccioacuten magnitud y duracioacuten del error de control
La ganancia del controlador la cual depende de la ganancia proporcional y tiempo de reposicioacuten ambos ajustables
La accioacuten del controlador directa o inversa
Un controlador proporcional-integral funciona de la siguiente manera Cuando cambia la carga del proceso o el punto de referencia la magnitud del error resultante se mide y multiplica por la ganancia proporcional como antes soacutelo para el control proporcional Sin embargo el control integral agrega un segundo efecto La accioacuten integral mueve la vaacutelvula a una velocidad proporcional al error multiplicado por el tiempo El tiempo necesario para que la accioacuten integral equipare el efecto proporcional se conoce como tiempo de reposicioacuten El tiempo de reposicioacuten puede ajustarse en el controlador Abajo se muestra una ecuacioacuten simplificada aproximando la accioacuten integral
16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

16
padding-top 45pt valign=topgt
Salida del controlador soacutelo integral = (KcTi) Avg e t
Donde
Kc = ganancia proporcional
Avg e = error promedio durante el tiempo t
Ti = tiempo de reposicioacuten y
t = tiempo desde el cambio de carga o punto de referencia
Advierta que cuando el tiempo desde el cambio de carga equipara el tiempo de
reposicioacuten ( t = Ti) la salida integral equipara a Kce En este momento la accioacuten proporcional ha sido repetida por la accioacuten integral Abajo se ilustra una ecuacioacuten simplificada ilustrando el control PI (proporcional-integral)
Salida del controlador PI = Kc [e + (1Ti) Avg e t] + m
La accioacuten integral continuacutea aumentando la salida del controlador en el tiempo hasta que la desviacioacuten es eliminada Mientras maacutes corto es el tiempo de reposicioacuten maacutes sensible (y potencialmente menos estable) es la accioacuten de control Mientras maacutes largo es el tiempo de reposicioacuten menos sensible (y maacutes estable) es la accioacuten de control
Las contribuciones individuales del control proporcional y control integral se ilustran graacuteficamente para un controlador PI tiacutepico
Puede observarse que en el modo PI mientras mayor es la desviacioacuten y menor es la ganancia proporcional en un proceso continuo maacutes accioacuten integral (o reposicioacuten) se requiere para remover la desviacioacuten De manera inversa una desviacioacuten pequentildea puede resultar en la eliminacioacuten del error antes de la expiracioacuten del tiempo de reposicioacuten
En ocasiones puede ser uacutetil que la salida del controlador cambie dependiendo de coacutemo estaacute cambiando el error Por ejemplo si la carga del proceso estaacute aumentando raacutepidamente seraacute ventajoso que la salida del controlador aumente raacutepidamente Si la velocidad de cambio en el error estaacute disminuyendo (auacuten hay un error pero estaacute disminuyendo con el tiempo) seraacute uacutetil que la salida del controlador disminuya Este efecto haraacute que la vaacutelvula de control se mueva en
17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

17
proporcioacuten a la velocidad de cambio del error agregando estabilidad al lazo Este efecto se conoce como control derivado
Control proporcional-maacutes-integral-maacutes-derivado
El control proporcional-maacutes-integral-maacutes-derivado tambieacuten se denomina
Control de tres modos
Accioacuten derivada
Control PID
Como antes un controlador PID modula su salida pero su valor de salida dependeraacute de los siguientes factores
La direccioacuten magnitud duracioacuten y velocidad de cambio del error de control
La ganancia del controlador la cual depende de la ganancia proporcional tiempo de reposicioacuten y tiempo derivado todos los cuales son ajustables
La accioacuten del controlador directa o inversa
El modo derivado de un controlador PID se basa en la velocidad de cambio del error La salida derivada soacutelo existe cuando el error estaacute cambiando desaparece cuando el error deja de cambiar incluso si hay un gran error absoluto La salida derivada puede expresarse con la siguiente ecuacioacuten simplificada
Salida de control derivado = Kctd ( e t)
Donde
Kc = ganancia proporcional
Td = tiempo derivado
t = corto periacuteodo de tiempo y
e = cambio en el error durante el corto periacuteodo de tiempo
Note que si el error no cambia e es cero lo cual al multiplicarse por KcTd hace todo el producto equivalente a cero Esto resulta en un efecto derivado nulo cuando el error no estaacute cambiando
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
18
Panel de control de la sala de control
La carga del proceso puede cambiar raacutepidamente Esto produce un raacutepido incremento en la magnitud del error (el error estaacute aumentando a medida que transcurre el tiempo) La accioacuten de control derivado actuacutea para aumentar la salida del controlador Es importante advertir que el efecto derivado ocurre muy raacutepidamente maacutes raacutepido que el efecto proporcional Por ejemplo suponga que la carga del proceso en el calentador de agua aumenta mediante la abertura de vaacutelvulas de agua caliente en el proceso La velocidad de cambio del error puede ser muy grande mientras que el error en siacute es auacuten bastante pequentildeo Esto sucede soacutelo una fraccioacuten de segundo despueacutes que las vaacutelvulas de agua caliente del proceso se abren Luego el efecto derivado es inmediato mientras que el efecto proporcional auacuten es pequentildeo ya que es proporcional al error real La accioacuten derivada impide que el error se haga excesivo antes que los modos proporcional e integral puedan obtener el control
La salida de un controlador proporcional-integral-derivado (PID) puede expresarse mediante la siguiente ecuacioacuten simplificada
Salida del controlador PID =
Kc[e + (1Ti) Avg e t + td ( e t)] + m
En un controlador PID la salida derivada ocurre primero Se dice que guiacutea a la salida proporcional La salida proporcional guiacutea a la salida integral Ya que la
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
19
accioacuten de control derivado se basa en la velocidad de cambio de la sentildeal de error agrega estabilidad al esquema de control Por ejemplo si el error no estaacute cambiando el modo derivado no hace nada Sin embargo a medida que el error aumenta con el tiempo la accioacuten derivada se suma a la accioacuten de control pero mientras las fuerzas de control proporcional e integral obligan a que la sentildeal de error disminuya con el tiempo la accioacuten derivada actuacutea para disminuir la accioacuten proporcional e integral El control PID tiene el efecto de aumentar la salida del controlador cuando ocurren grandes cambios de carga y de amortiguar la salida del controlador a medida que el error comienza a disminuir
Suponga que el calentador de agua descrito arriba estaacute controlado con un controlador PID Si la temperatura en el tanque disminuye lentamente por debajo del punto de referencia el modo derivado tendraacute escaso efecto y el controlador PID actuaraacute como un controlador PI Sin embargo si el descenso de temperatura ocurre raacutepidamente la accioacuten para abrir la vaacutelvula de control de vapor se produce al comienzo principalmente mediante la accioacuten derivada Maacutes adelante tiene lugar la accioacuten proporcional Finalmente se hace sentir la accioacuten integral
Gabinete de control
El resumen de las acciones del controlador PID arroja lo siguiente
La accioacuten proporcional (P) se usa con la ganancia para dar estabilidad a un proceso
La accioacuten proporcional maacutes integral (PI) o reposicioacuten se usa para compensar los cambios de carga en un proceso continuo que resultan en una desviacioacuten cuando se usa soacutelo el control proporcional
La accioacuten proporcional-maacutes-integral-maacutes-derivada (PID) se usa para agregar estabilidad a un lazo de control Acelera la salida del controlador cuando aumentan los cambios de carga de un proceso haciendo que el error
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
20
aumente con el tiempo Amortigua la accioacuten de la vaacutelvula a medida que disminuye la velocidad de cambio en el error
TIPOS DE CONTROL AUTOMAacuteTICO
CONTROLADOR DE PROCESOS
El lazo de control automaacutetico baacutesico se usa en varias configuraciones diferentes para proveer tipos especiacuteficos de lazos de control para propoacutesitos de control especiacuteficos Algunos de los tipos de lazos de control maacutes importantes y comuacutenmente usados incluyen
Control de relacioacuten
Control en cascada
Los controladores automaacuteticos tambieacuten pueden ponerse en un modo Manual Este modo permite al usuario controlar directamente la salida del controlador Los controladores tambieacuten deben afinarse para cualquier aplicacioacuten particular
Control de relacioacuten
El diagrama de bloques muestra un ejemplo de control de relacioacuten La sentildeal de una variable del proceso medida es recibida mediante un computador de relacioacuten El computador multiplica la sentildeal de entrada por una constante conocida como iacutendice de relacioacuten El producto de la multiplicacioacuten se convierte en una sentildeal de salida que ajusta remotamente el punto de referencia de un controlador PID Este tipo de control se usa a menudo para el control de la
21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

21
combustioacuten donde el flujo requerido de aire es un muacuteltiplo del flujo de combustible
En el ejemplo el computador de relacioacuten es en realidad parte del controlador del aire de combustioacuten Se muestra separadamente del diagrama de bloques con propoacutesitos de claridad Para que el quemador ilustrado en el diagrama de bloques sea controlado mediante un lazo de control automaacutetico verdadero el caudal de gas natural del quemador deberaacute ser controlado mediante un controlador separado como se muestra en el diagrama de bloques
Control en cascada (punto de referencia remoto)
El control en cascada se denomina a veces control de punto de referencia remoto Ocurre cuando la salida de un controlador ajusta el punto de referencia de un segundo controlador El segundo controlador recibe la entrada de una segunda variable del proceso Emplea el punto de referencia proporcionado por el primer controlador para determinar el error del segundo controlador
En el diagrama de bloques el operador ajusta la temperatura deseada (punto de referencia) en el controlador de temperatura La salida del controlador de temperatura se usa para ajustar remotamente el caudal de punto de referencia en un controlador de flujo de agua de enfriamiento El controlador de flujo modula una vaacutelvula de control en una tuberiacutea de agua de enfriamiento El operador puede cambiar el modo del controlador de flujo de Cascada a Automaacutetico En este caso el operador seraacute capaz de ajustar directamente el punto de referencia de caudal de agua de enfriamiento eliminando la temperatura de la loacutegica
Banda muerta
Se usa una banda muerta cuando no es deseable para el controlador responder a cada variacioacuten entre la variable del proceso y el punto de referencia Puede ser aceptable para la variable del proceso moverse dentro de un margen donde no se requiere de accioacuten alguna En este caso hay una banda de inactividad alrededor del punto de referencia En la banda muerta la salida del controlador no tiene efecto sobre el dispositivo de control Las bandas muertas normalmente se usan para el control binario Por ejemplo un termostato que controla la temperatura en una casa activaraacute el calentador a una cierta temperatura El calentador continuaraacute calentando hasta que la temperatura alcance una temperatura mayor especiacutefica y luego se desactivaraacute El margen entre las dos temperaturas es la banda muerta
Afinamiento del lazo de control
El controlador PID permite tres tipos de control para la salida de un controlador A cada tipo debe daacutersele una ponderacioacuten especiacutefica para maximizar la
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
22
eficiencia del control Los ajustes de estas ponderaciones se conocen como el afinamiento del controlador Los ajustes pueden hacerse a la ganancia proporcional tiempo de reposicioacuten y tiempo derivado El afinamiento estaacute a cargo del personal de instrumentacioacuten El operador de planta no afina un controlador La tarea del operador consiste en reconocer cuaacutendo se requiere de un afinamiento Si un controlador estaacute lento para responder o consistentemente sobrepasa el margen de control el operador deberaacute notificarlo al personal de instrumentacioacuten Al evaluar la necesidad de afinamiento el operador deberaacute decidir si un proceso es lento de por siacute o el controlador requiere de afinamiento Una forma de decidir es poniendo el lazo de control en modo Manual y llevando luego la variable del proceso dentro del margen de control Si el sistema puede ponerse bajo control en el modo Manual deberaacute ser posible configurar un controlador para controlar la variable del proceso en forma automaacutetica
Modo manual
En forma ocasional un operador puede necesitar sacar un controlador del modo Automaacutetico y ponerlo en modo Manual Al hacerlo el operador estaraacute derivando la funcioacuten de comparacioacuten del controlador y ajustando directamente la salida del controlador El operador deberaacute estar observando la medicioacuten de la variable del proceso y ajustando la salida del controlador sobre la base de esta lectura La salida generalmente se ajusta como un porcentaje entre 0 y 100 por ciento En modo Manual el controlador no responde automaacuteticamente a los cambios en la variable del proceso Un controlador puede ponerse en Manual para estabilizar un lazo de control cuando la variable del proceso oscila en forma excesiva Normalmente la oscilacioacuten excesiva se elimina mediante el afinamiento del lazo de control Esto puede no ser posible durante los periacuteodos fuera de turno Ademaacutes algunos lazos de control estaacuten limitados por el proceso Cuando se observa este tipo de oscilacioacuten el operador puede en ocasiones poner el lazo de control en modo Manual y mantener la salida uniforme Una vez alcanzada la estabilidad el operador puede cambiar lentamente la salida en el modo Manual para devolver la variable del proceso al margen de control
23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

23
CUADERNO DE EJERCICIOS
24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

24
25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

25
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
26
27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

27
28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

28
29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

29
30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

30
OBJETIVOS DE APRENDIZAJE
2ENCLAVAMIENTOS
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Definir los teacuterminos enclavamiento y permisivo
Explicar coacutemo los enclavamientos y permisivos afectan la operacioacuten de los equipos o instrumentos
Dar varios ejemplos de enclavamientos en las plantas de procesos o en la vida diaria
INTRODUCCIOacuteN A ENCLAVAMIENTOS
MOLINO SAG
31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

31
Para operar una planta en forma efectiva y segura ciertos equipos no pueden ponerse en funcionamiento a menos que otros equipos esteacuten ya operando Tambieacuten hay equipos que detienen automaacuteticamente otros equipos cuando ellos mismos dejan de funcionar Cualquier disposicioacuten donde la operacioacuten de una pieza o mecanismo produzca o impida la operacioacuten de otra(o) generalmente se conoce como un enclavamiento Los motores normalmente estaacuten enclavados pero otros equipos eleacutectricos como temporizadores y vaacutelvulas de solenoide tambieacuten pueden enclavarse Para evitar confusiones deberaacute reconocerse que la palabra enclavamiento se usa de dos formas diferentes (vea los Nuacutemeros 1 y 2 abajo)
1 La palabra enclavamiento se usa como un teacutermino general para describir un sistema de interruptores que
Impide que arranquen uno o maacutes equipos (permisivo)
Impide que funcionen uno o maacutes equipos (desconexioacuten)
Arranca uno o maacutes equipos en forma automaacutetica
2 El teacutermino enclavamiento tambieacuten se usa para identificar un sistema de interruptores que detiene equipos en funcionamiento Tambieacuten puede usarse como un teacutermino especiacutefico para identificar un sistema de interruptores que arranca equipos en forma automaacutetica Para distinguir estas situaciones del permisivo descrito en el punto 3 abajo el teacutermino enclavamiento se usa indistintamente para el caso de la detencioacuten (desconexioacuten) de equipos en forma automaacutetica o arranque automaacutetico de equipos
3 Cuando un enclavamiento se usa para asegurar que ciertos interruptores se han cerrado para permitir el arranque de alguacuten equipo se emplea el teacutermino permisivo
El uso del teacutermino enclavamiento ya sea en forma especiacutefica o general normalmente estaraacute libre del contexto Un enclavamiento puede resultar de un conjunto mecaacutenico o eleacutectrico o una combinacioacuten de ambos Las modernas plantas de procesamiento contienen muy pocos si los hubiere enclavamientos mecaacutenicos normalmente todos son eleacutectricos Los dispositivos mecaacutenicos como un flotador o brazo de palanca pueden hacer que un interruptor eleacutectrico impida el arranque de un motor o lo desconecte si ya estaacute funcionando Eacuteste es un enclavamiento eleacutectrico ya que la energiacutea eleacutectrica requerida por el motor es interrumpida por el interruptor enclavado
32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

32
CENTRO DE CONTROL DE MOTORES
33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

33
DEFINICIONES
Permisivo
Un permisivo es una condicioacuten que debe ser satisfecha antes que un equipo pueda ponerse en funcionamiento Si el Equipo A no pueda arrancar a menos que el Equipo B esteacute funcionando y el Interruptor C esteacute cerrado entonces el Equipo A tiene dos permisivos
Equipo B funcionando
Interruptor C cerrado
Por ejemplo considere una bomba que no puede arrancar a menos que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas esteacute cerrado Cuando el interruptor estaacute cerrado indica que hay presioacuten y agua en la tuberiacutea de suministro de agua de prensaestopas Cuando el interruptor detecta que la presioacuten es lo suficientemente alta se cierra Esto cierra un interruptor en el circuito de arranque de la bomba que permite al operador arrancar la bomba Si el interruptor automaacutetico por caiacuteda de presioacuten no detecta que la presioacuten es lo suficientemente alta no se cierra y el interruptor en el circuito de arranque de la bomba permanece abierto En consecuencia el operador no puede arrancar la bomba Esta condicioacuten se conoce como un permisivo
GRAacuteFICO DE ENCLAVAMIENTOS
34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

34
Un permisivo se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos La tabla de enclavamientos entrega una explicacioacuten escrita de la entrada que debe ser satisfecha Un equipo puede tener muchos permisivos Cada permisivo debe ser satisfecho para arrancar la bomba y cada uno se muestra como una flecha de entrada separada al diamante Cada flecha de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo para el cual los permisivos deben ser satisfechos para que eacuteste arranque Cada diamante deberaacute tener soacutelo una flecha de salida
Tabla de enclavamientos para una condicioacuten permisiva
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Bomba de agua de sello
A El motor de la bomba no puede
partir si la presioacuten en la liacutenea de
admisioacuten de agua de sello es baja
(PS)
- X
La bomba puede estar disentildeada de modo que el interruptor automaacutetico por caiacuteda de presioacuten de agua de prensaestopas abra el circuito del motor desconectando la bomba si la presioacuten disminuye mientras el motor estaacute funcionando En este caso el interruptor tambieacuten estaraacute actuando como un enclavamiento
Enclavamiento
Un enclavamiento produce la detencioacuten o arranque automaacutetico de un equipo sobre la base de las conexiones con otros equipos o instrumentos Un enclavamiento tambieacuten puede llamarse enclavamiento de desconexioacuten o arranque Para mantener el teacutermino breve soacutelo se denomina enclavamiento Si el Equipo A se detiene automaacuteticamente cuando el Equipo B se detiene el Equipo A estaacute enclavado con el Equipo B En ocasiones un enclavamiento arrancaraacute automaacuteticamente un equipo cuando su condicioacuten es satisfecha El Equipo A puede arrancar automaacuteticamente cuando el Equipo B arranca El Equipo A tambieacuten puede ser una unidad de reserva para el Equipo B El Equipo A puede arrancar automaacuteticamente cuando el Equipo B se detiene En estos casos el Equipo A estaacute enclavado con el Equipo B
Si una correa transportadora estaacute enclavada con un detector de chute obstruido como se muestra en el diagrama el accionamiento de la correa se detendraacute (desconectaraacute) automaacuteticamente si el detector detecta un chute obstruido
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
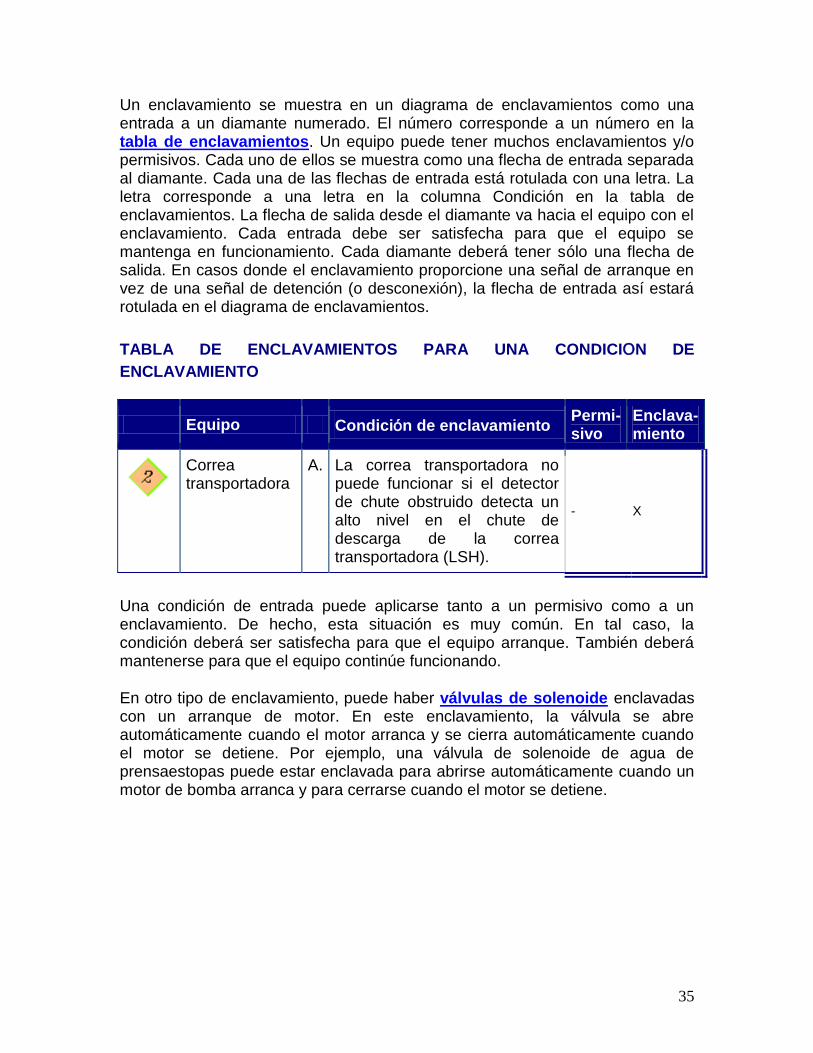
35
Un enclavamiento se muestra en un diagrama de enclavamientos como una entrada a un diamante numerado El nuacutemero corresponde a un nuacutemero en la tabla de enclavamientos Un equipo puede tener muchos enclavamientos yo permisivos Cada uno de ellos se muestra como una flecha de entrada separada al diamante Cada una de las flechas de entrada estaacute rotulada con una letra La letra corresponde a una letra en la columna Condicioacuten en la tabla de enclavamientos La flecha de salida desde el diamante va hacia el equipo con el enclavamiento Cada entrada debe ser satisfecha para que el equipo se mantenga en funcionamiento Cada diamante deberaacute tener soacutelo una flecha de salida En casos donde el enclavamiento proporcione una sentildeal de arranque en vez de una sentildeal de detencioacuten (o desconexioacuten) la flecha de entrada asiacute estaraacute rotulada en el diagrama de enclavamientos
TABLA DE ENCLAVAMIENTOS PARA UNA CONDICION DE
ENCLAVAMIENTO
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Correa transportadora
A La correa transportadora no puede funcionar si el detector de chute obstruido detecta un alto nivel en el chute de descarga de la correa transportadora (LSH)
- X
Una condicioacuten de entrada puede aplicarse tanto a un permisivo como a un enclavamiento De hecho esta situacioacuten es muy comuacuten En tal caso la condicioacuten deberaacute ser satisfecha para que el equipo arranque Tambieacuten deberaacute mantenerse para que el equipo continuacutee funcionando
En otro tipo de enclavamiento puede haber vaacutelvulas de solenoide enclavadas con un arranque de motor En este enclavamiento la vaacutelvula se abre automaacuteticamente cuando el motor arranca y se cierra automaacuteticamente cuando el motor se detiene Por ejemplo una vaacutelvula de solenoide de agua de prensaestopas puede estar enclavada para abrirse automaacuteticamente cuando un motor de bomba arranca y para cerrarse cuando el motor se detiene
36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

36
VAacuteLVULAS DE SOLENOIDE ENCLAVADAS
Los enclavamientos de vaacutelvulas se muestran en la tabla de enclavamientos Una entrada a un diamante de enclavamiento numerado representa una sentildeal que hace que la vaacutelvula se abra o se cierre La sentildeal de salida indica cuaacutel vaacutelvula se veraacute afectada
TABLA DE ENCLAVAMIENTOS PARA UNA VALVULA QUE SE
ABRE AUTOMATICAMENTE
Equipo Condicioacuten de enclavamiento Permi- sivo
Enclava- miento
Vaacutelvula de solenoide de agua de sello
A La vaacutelvula se abre
automoacuteticamente cuando el motor de la bomba de agua de sello parte y se cierra cuando el motor se apaga
- X
37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

37
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
38
SENSORES
OBJETIVOS DE APRENDIZAJE
3SENSORES
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de presioacuten
Las caracteriacutesticas y principios de operacioacuten de varios tipos de medidor de flujo
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de nivel
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de temperatura
Las caracteriacutesticas y principios de operacioacuten de varios tipos de sensor de densidad
INTRODUCCIOacuteN A LOS SENSORES
Los lazos de control dependen de la precisioacuten de los sensores que proveen las mediciones de las variables del proceso Hay muchos tipos de dispositivos sensibles usados para medir variables del proceso Algunos de los dispositivos sensibles maacutes comunes miden lo siguiente
Presioacuten
Flujo
Nivel
Temperatura
Densidad
En muchos de los instrumentos sensibles modernos el transmisor estaacute contenido en la misma caja del elemento sensible El transmisor tambieacuten puede ser una unidad separada Dependeraacute del estilo del elemento sensible instalado
39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

39
MANOacuteMETROS
SENSORES DE PRESIOacuteN
Manoacutemetro
El manoacutemetro de tubo en U de vidrio mostrado abajo se usa para indicar presioacuten y vaciacuteo cerca de la presioacuten atmosfeacuterica Lo hace moviendo el nivel del liacutequido en cada una de las columnas del tubo en U en respuesta a cambios en la presioacuten o vaciacuteo Los manoacutemetros metaacutelicos se usan para la alta presioacuten y vaciacuteo El manoacutemetro es importante como uno de los tipos de normas de medicioacuten altamente precisas usadas para calibrar otros instrumentos de presioacuten
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
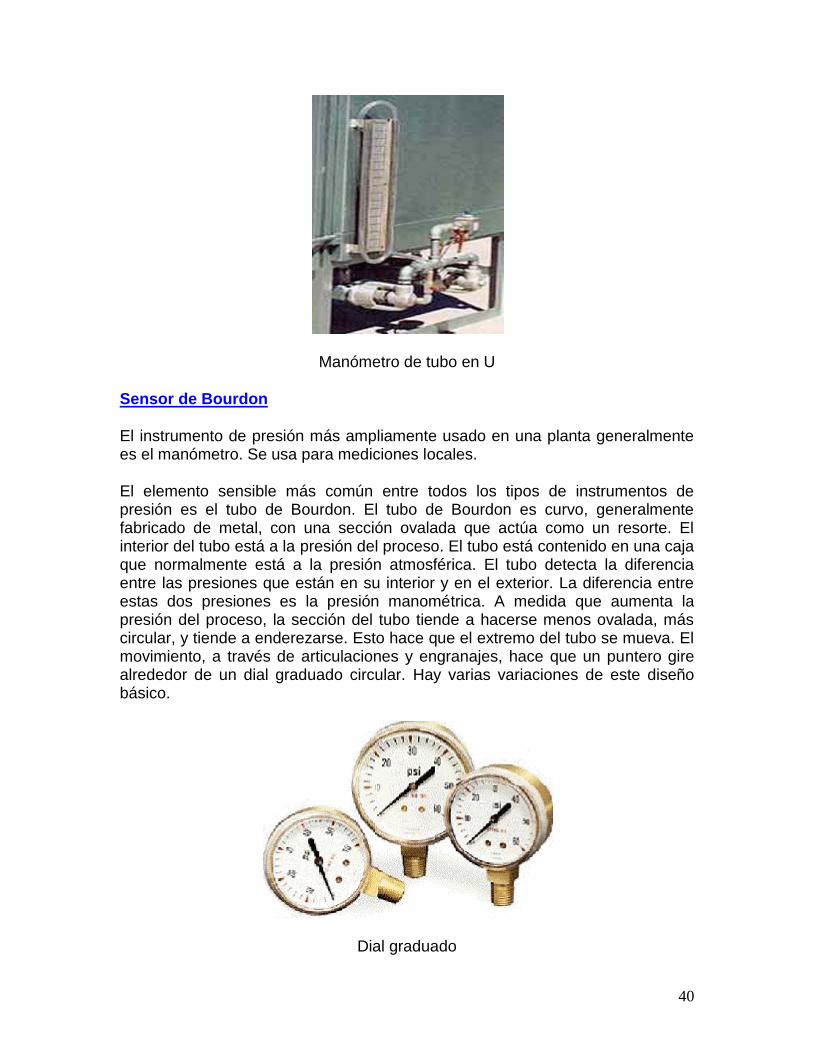
40
Manoacutemetro de tubo en U
Sensor de Bourdon
El instrumento de presioacuten maacutes ampliamente usado en una planta generalmente es el manoacutemetro Se usa para mediciones locales
El elemento sensible maacutes comuacuten entre todos los tipos de instrumentos de presioacuten es el tubo de Bourdon El tubo de Bourdon es curvo generalmente fabricado de metal con una seccioacuten ovalada que actuacutea como un resorte El interior del tubo estaacute a la presioacuten del proceso El tubo estaacute contenido en una caja que normalmente estaacute a la presioacuten atmosfeacuterica El tubo detecta la diferencia entre las presiones que estaacuten en su interior y en el exterior La diferencia entre estas dos presiones es la presioacuten manomeacutetrica A medida que aumenta la presioacuten del proceso la seccioacuten del tubo tiende a hacerse menos ovalada maacutes circular y tiende a enderezarse Esto hace que el extremo del tubo se mueva El movimiento a traveacutes de articulaciones y engranajes hace que un puntero gire alrededor de un dial graduado circular Hay varias variaciones de este disentildeo baacutesico
Dial graduado
41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

41
Sensor de fuelle
Otro tipo comuacuten de sensor de presioacuten usa un fuelle metaacutelico o una caacutepsula que actuacutea de manera simular al sensor de Bourdon La presioacuten contrae el fuelle La liberacioacuten de presioacuten hace que el fuelle se relaje El movimiento del fuelle se comunica a un puntero Esto permite que la presioacuten se muestre sobre un dial graduado
Sensor de diafragma
Tambieacuten puede usarse un sensor de diafragma para medir la presioacuten La fuerza de la presioacuten del proceso actuando contra un diafragma flexible es contrarrestada por un resorte El aumento de la presioacuten produce el movimiento del puntero
Extensiacutemetro
Cuando un objeto soacutelido es sujeto a presioacuten se deforma y se dice que se somete a un esfuerzo Un extensiacutemetro es un dispositivo electroacutenico con una capacitancia o resistencia eleacutectrica que cambia a medida que el sensor se somete a un esfuerzo Cuando el sensor detecta una presioacuten del proceso su capacitancia o resistencia puede medirse y correlacionarse con la presioacuten
SENSORES DE FLUJO
Introduccioacuten
Hay muchos tipos de sensores usados para medir el caudal y volumen de fluidos Estos sensores pueden agruparse en varios tipos diferentes Los sensores de flujo maacutes comunes se describen a continuacioacuten
SENSORES DE FLUJO
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
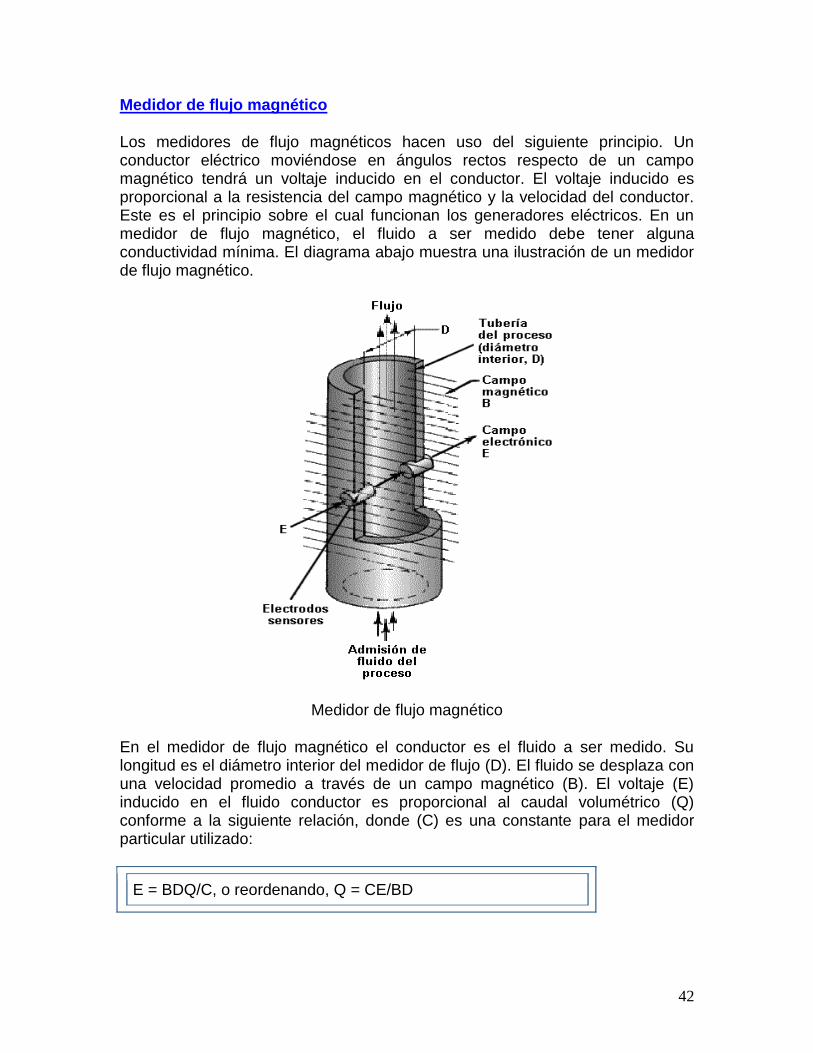
42
Medidor de flujo magneacutetico
Los medidores de flujo magneacuteticos hacen uso del siguiente principio Un conductor eleacutectrico movieacutendose en aacutengulos rectos respecto de un campo magneacutetico tendraacute un voltaje inducido en el conductor El voltaje inducido es proporcional a la resistencia del campo magneacutetico y la velocidad del conductor Este es el principio sobre el cual funcionan los generadores eleacutectricos En un medidor de flujo magneacutetico el fluido a ser medido debe tener alguna conductividad miacutenima El diagrama abajo muestra una ilustracioacuten de un medidor de flujo magneacutetico
Medidor de flujo magneacutetico
En el medidor de flujo magneacutetico el conductor es el fluido a ser medido Su longitud es el diaacutemetro interior del medidor de flujo (D) El fluido se desplaza con una velocidad promedio a traveacutes de un campo magneacutetico (B) El voltaje (E) inducido en el fluido conductor es proporcional al caudal volumeacutetrico (Q) conforme a la siguiente relacioacuten donde (C) es una constante para el medidor particular utilizado
E = BDQC o reordenando Q = CEBD
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
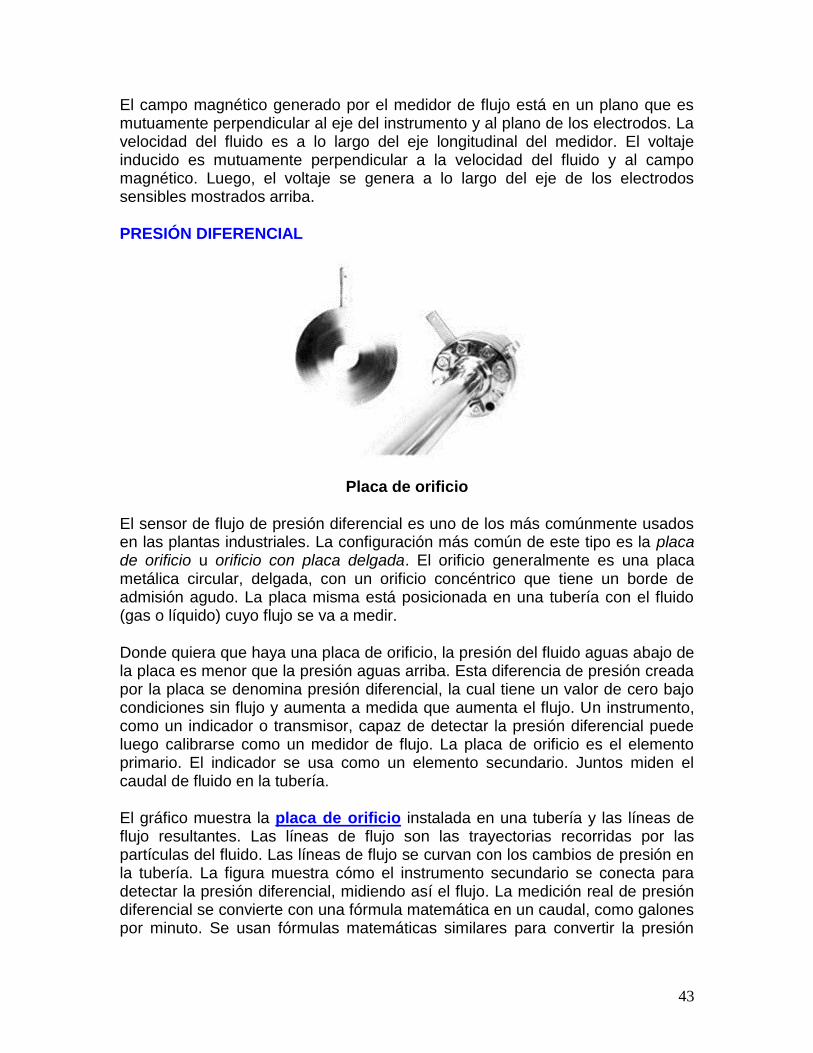
43
El campo magneacutetico generado por el medidor de flujo estaacute en un plano que es mutuamente perpendicular al eje del instrumento y al plano de los electrodos La velocidad del fluido es a lo largo del eje longitudinal del medidor El voltaje inducido es mutuamente perpendicular a la velocidad del fluido y al campo magneacutetico Luego el voltaje se genera a lo largo del eje de los electrodos sensibles mostrados arriba
PRESIOacuteN DIFERENCIAL
Placa de orificio
El sensor de flujo de presioacuten diferencial es uno de los maacutes comuacutenmente usados en las plantas industriales La configuracioacuten maacutes comuacuten de este tipo es la placa de orificio u orificio con placa delgada El orificio generalmente es una placa metaacutelica circular delgada con un orificio conceacutentrico que tiene un borde de admisioacuten agudo La placa misma estaacute posicionada en una tuberiacutea con el fluido (gas o liacutequido) cuyo flujo se va a medir
Donde quiera que haya una placa de orificio la presioacuten del fluido aguas abajo de la placa es menor que la presioacuten aguas arriba Esta diferencia de presioacuten creada por la placa se denomina presioacuten diferencial la cual tiene un valor de cero bajo condiciones sin flujo y aumenta a medida que aumenta el flujo Un instrumento como un indicador o transmisor capaz de detectar la presioacuten diferencial puede luego calibrarse como un medidor de flujo La placa de orificio es el elemento primario El indicador se usa como un elemento secundario Juntos miden el caudal de fluido en la tuberiacutea
El graacutefico muestra la placa de orificio instalada en una tuberiacutea y las liacuteneas de flujo resultantes Las liacuteneas de flujo son las trayectorias recorridas por las partiacuteculas del fluido Las liacuteneas de flujo se curvan con los cambios de presioacuten en la tuberiacutea La figura muestra coacutemo el instrumento secundario se conecta para detectar la presioacuten diferencial midiendo asiacute el flujo La medicioacuten real de presioacuten diferencial se convierte con una foacutermula matemaacutetica en un caudal como galones por minuto Se usan foacutermulas matemaacuteticas similares para convertir la presioacuten
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
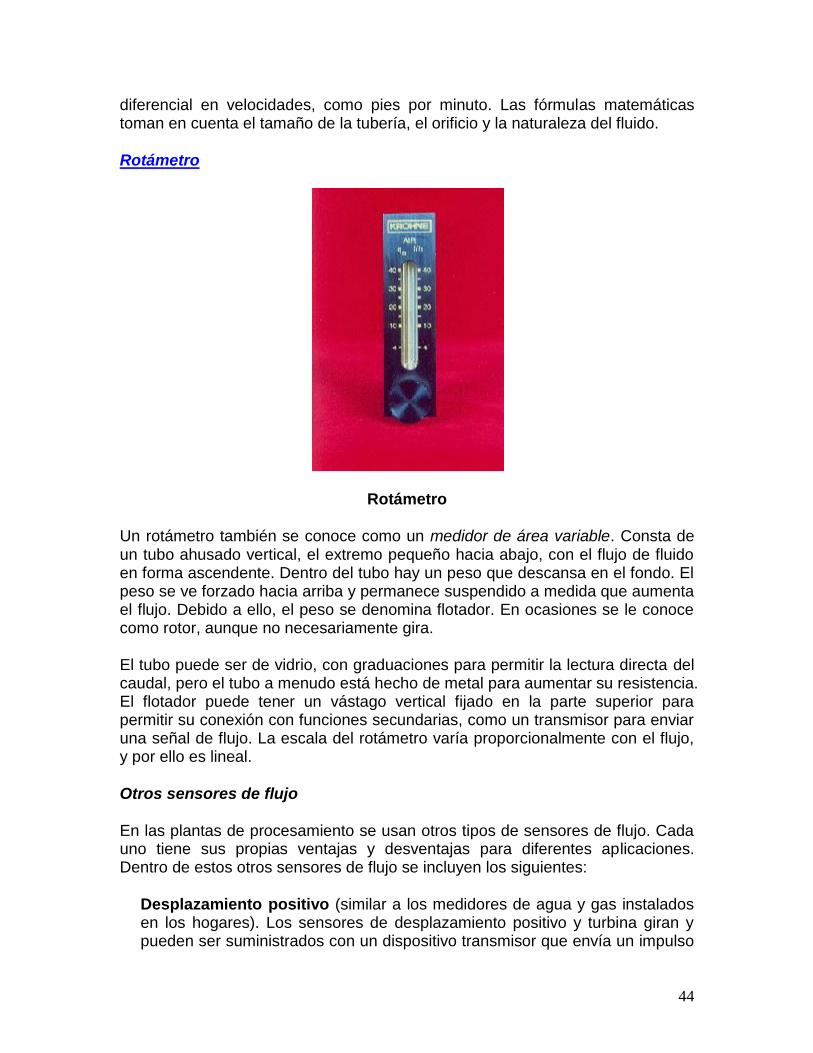
44
diferencial en velocidades como pies por minuto Las foacutermulas matemaacuteticas toman en cuenta el tamantildeo de la tuberiacutea el orificio y la naturaleza del fluido
Rotaacutemetro
Rotaacutemetro
Un rotaacutemetro tambieacuten se conoce como un medidor de aacuterea variable Consta de un tubo ahusado vertical el extremo pequentildeo hacia abajo con el flujo de fluido en forma ascendente Dentro del tubo hay un peso que descansa en el fondo El peso se ve forzado hacia arriba y permanece suspendido a medida que aumenta el flujo Debido a ello el peso se denomina flotador En ocasiones se le conoce como rotor aunque no necesariamente gira
El tubo puede ser de vidrio con graduaciones para permitir la lectura directa del caudal pero el tubo a menudo estaacute hecho de metal para aumentar su resistencia El flotador puede tener un vaacutestago vertical fijado en la parte superior para permitir su conexioacuten con funciones secundarias como un transmisor para enviar una sentildeal de flujo La escala del rotaacutemetro variacutea proporcionalmente con el flujo y por ello es lineal
Otros sensores de flujo
En las plantas de procesamiento se usan otros tipos de sensores de flujo Cada uno tiene sus propias ventajas y desventajas para diferentes aplicaciones Dentro de estos otros sensores de flujo se incluyen los siguientes
Desplazamiento positivo (similar a los medidores de agua y gas instalados en los hogares) Los sensores de desplazamiento positivo y turbina giran y pueden ser suministrados con un dispositivo transmisor que enviacutea un impulso
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
45
con cada rotacioacuten Esta sentildeal de salida es digital y puede usarse directamente o convertirse en otras formas
Turbina
Voacutertice
Teacutermico
Ultrasoacutenico
Vertedero con contraccioacuten (para medir el flujo en canales abiertos)
Peso (para medir el caudal de soacutelidos sobre una correa transportadora)
SENSORES DE NIVEL
Introduccioacuten
Hay muchos tipos de sensores de nivel que se utilizan para monitorear y medir el nivel de liacutequidos en tanques sumideros y otros recipientes A continuacioacuten se describen algunos de los tipos maacutes comunes instalados en plantas de procesamiento
SENSORES DE NIVEL
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
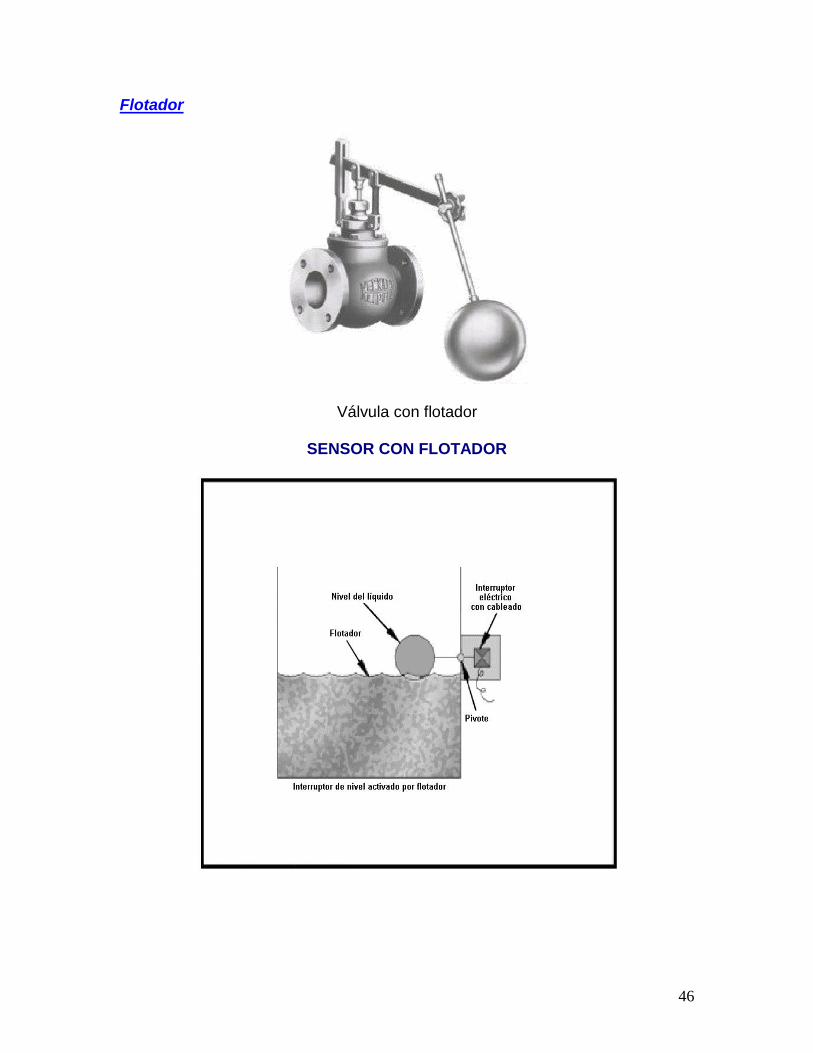
46
Flotador
Vaacutelvula con flotador
SENSOR CON FLOTADOR
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
47
Uno de los tipos principales de sensores de nivel usa un flotador que reposa sobre la superficie del liacutequido en un tanque La ilustracioacuten arriba muestra un flotador de bola que opera directamente un mecanismo mecaacutenico conectado a una vaacutelvula A medida que el flotador sube con el nivel del liacutequido la vaacutelvula estaacute calibrada para cerrarse Cuando el flotador desciende con el nivel del liacutequido la vaacutelvula estaacute calibrada para abrirse
El diagrama esquemaacutetico ilustra la posicioacuten de un flotador que entrega una medicioacuten de nivel del liacutequido Un dispositivo eleacutectrico puede transmitir la medicioacuten a otros dispositivos de indicacioacuten y monitoreo como un interruptor eleacutectrico o transmisor modulador El flotador puede estar montado al interior del tanque pero a menudo se coloca dentro de una caacutemara metaacutelica que estaacute entubada con el tanque y se llena con liacutequido a la misma altura del tanque
Desplazamiento
Los sensores de nivel tipo desplazamiento usan un cilindro vertical llamado desplazador conocido en ocasiones como flotador Mientras que un flotador se mantiene sobre la superficie del liacutequido un desplazador siempre tiende a hundirse hasta el fondo del tanque porque es maacutes pesado que el liacutequido que desplaza El desplazador es contrabalanceado con un resorte El desplazador al igual que el flotador puede montarse fuera del tanque
Cuando el nivel estaacute en la parte maacutes baja del margen el resorte soporta el peso total del desplazador y el indicador muestra un nivel de cero La sentildeal de salida de un transmisor estaraacute en el extremo inferior de su alcance A medida que el nivel aumenta el desplazador se sumerge parcialmente y una fuerza de flotacioacuten reduce el peso aparente del desplazador Cuando el nivel llega a la parte superior del margen el desplazador estaacute totalmente sumergido El peso aparente del desplazador estaraacute en su miacutenimo El indicador muestra un nivel del 100 por ciento y la sentildeal de salida del transmisor estaraacute en el extremo superior de su alcance
Carga
La carga de liacutequido en un tanque es la presioacuten del liacutequido Al medir la presioacuten puede conocerse el nivel del liacutequido La presioacuten se mide usando instrumentos de presioacuten como un sensor de carga La convencioacuten empleada para identificar dichos instrumentos es rotularlos como instrumentos de nivel conforme a su uso no como instrumentos de presioacuten
El diagrama muestra un tanque abierto el cual estaacute a presioacuten atmosfeacuterica El instrumento de nivel para medir la carga de liacutequido puede ser un indicador de presioacuten ordinario u otro instrumento que mide la presioacuten manomeacutetrica La carga es lineal y proporcional al nivel del liacutequido en un tanque abierto a la presioacuten atmosfeacuterica El nivel puede leerse directamente del manoacutemetro
48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

48
El indicador no puede usarse en un tanque cerrado y presurizado porque la lectura seraacute falsa El indicador detectaraacute no soacutelo la carga del liacutequido sino tambieacuten la presioacuten sobre el liacutequido al interior del tanque e indicaraacute la suma de las presiones
SENSOR DE PRESIOacuteN MANOMEacuteTRICA
Indicador de nivel
Un instrumento de nivel baacutesico ampliamente usado a menudo con otros tipos de instrumentos de nivel es el indicador de nivel o tubo indicador Eacuteste consiste en un segmento vertical de tuberiacutea de vidrio o caacutemara metaacutelica conteniendo una o dos ventanas de vidrio El tubo o ventana de vidrio se fija directamente al tanque y muestra el mismo nivel de liacutequido que hay en el tanque independiente de la presioacuten en el tanque
MEDIDOR DE NIVEL
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
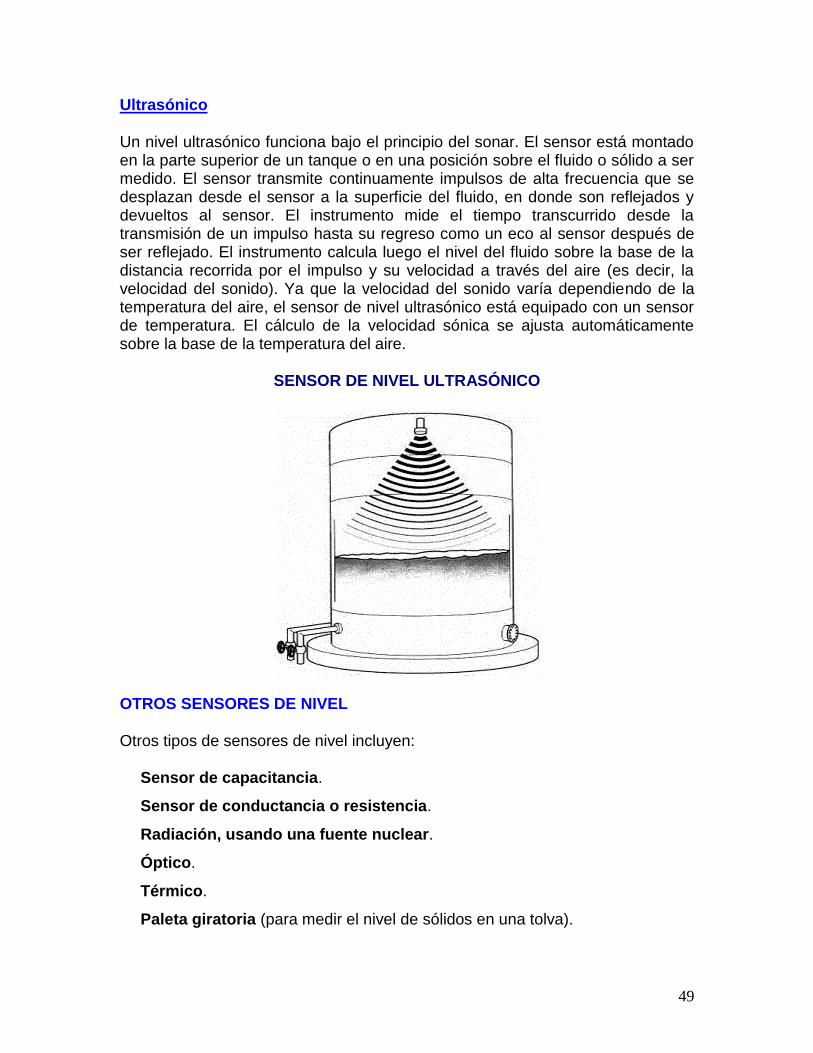
49
Ultrasoacutenico
Un nivel ultrasoacutenico funciona bajo el principio del sonar El sensor estaacute montado en la parte superior de un tanque o en una posicioacuten sobre el fluido o soacutelido a ser medido El sensor transmite continuamente impulsos de alta frecuencia que se desplazan desde el sensor a la superficie del fluido en donde son reflejados y devueltos al sensor El instrumento mide el tiempo transcurrido desde la transmisioacuten de un impulso hasta su regreso como un eco al sensor despueacutes de ser reflejado El instrumento calcula luego el nivel del fluido sobre la base de la distancia recorrida por el impulso y su velocidad a traveacutes del aire (es decir la velocidad del sonido) Ya que la velocidad del sonido variacutea dependiendo de la temperatura del aire el sensor de nivel ultrasoacutenico estaacute equipado con un sensor de temperatura El caacutelculo de la velocidad soacutenica se ajusta automaacuteticamente sobre la base de la temperatura del aire
SENSOR DE NIVEL ULTRASOacuteNICO
OTROS SENSORES DE NIVEL
Otros tipos de sensores de nivel incluyen
Sensor de capacitancia
Sensor de conductancia o resistencia
Radiacioacuten usando una fuente nuclear
Oacuteptico
Teacutermico
Paleta giratoria (para medir el nivel de soacutelidos en una tolva)
50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

50
Peso Un instrumento de peso detecta el peso del tanque maacutes su contenido pero generalmente puede ser ajustado para restar el peso del tanque en forma automaacutetica La resultante es el peso del contenido del tanque el cual es proporcional al nivel del contenido del tanque
SENSORES DE TEMPERATURA
La mayoriacutea de los sensores de temperatura se insertan directamente en un fluido de proceso o se montan sobre una superficie de contencioacuten Otros sensores de temperatura son dispositivos sin contacto directo Abajo se describen los dispositivos sensores de temperatura maacutes comunes usados en plantas de procesamiento
SENSOR DE TEMPERATURA
Bimetaacutelico
El tipo de sensor maacutes comuacuten para leer una temperatura de proceso localmente es un termoacutemetro bimetaacutelico Este sensor usa dos delgadas cintas de metales diferentes adheridas entre siacute Cuando los metales unidos se calientan se expanden desigualmente y las cintas se doblan hacia el lado que se expande menos Este doblamiento produce el movimiento del extremo del bimetal lo cual resulta en el movimiento de un puntero para indicar la temperatura
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
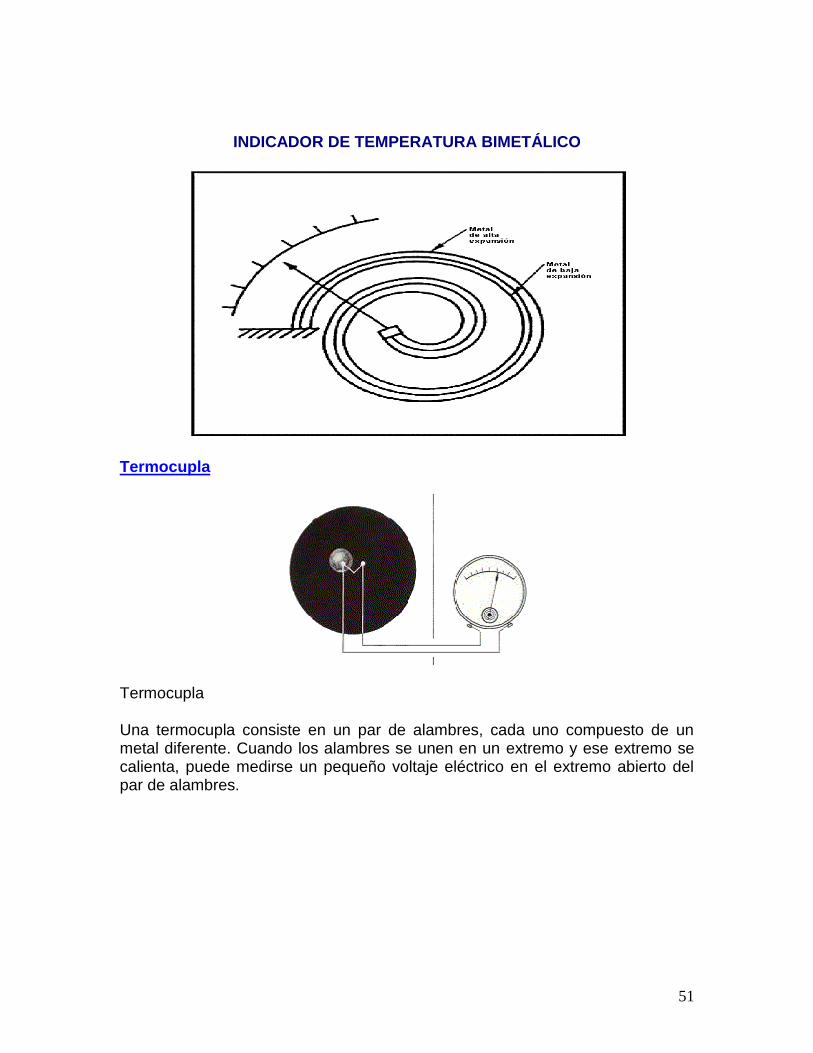
51
INDICADOR DE TEMPERATURA BIMETAacuteLICO
Termocupla
Termocupla
Una termocupla consiste en un par de alambres cada uno compuesto de un metal diferente Cuando los alambres se unen en un extremo y ese extremo se calienta puede medirse un pequentildeo voltaje eleacutectrico en el extremo abierto del par de alambres
52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

52
CIRCUITO DE TERMOCUPLA
El extremo unido de la termocupla se denomina empalme de medicioacuten y el extremo abierto es el empalme de referencia El voltaje aumenta a medida que el extremo calentado se hace maacutes caliente de modo que medir el voltaje de una termocupla sumergida en un fluido de proceso es equivalente a medir la temperatura del fluido El sistema de medicioacuten baacutesico usa un milivoltiacutemetro para medir el voltaje
Se han establecido normas para el tipo y composicioacuten de los metales y aleaciones usados en las termocuplas Un tipo de termocupla usado comuacutenmente es el de hierro-constantano (ISA tipo J) el cual tiene un alambre de hierro puro y otro de constantano El constantano es una aleacioacuten especiacutefica de niacutequel y cobre
RESISTENCIA
El sensor de temperatura tipo resistencia es otro tipo importante de dispositivo de medicioacuten de temperatura Este sensor depende del hecho que la resistencia eleacutectrica de un alambre aumenta a medida que aumenta la temperatura del alambre Medir la resistencia eleacutectrica de un tipo dado de alambre sumergido en un fluido de proceso seraacute equivalente a medir la temperatura del fluido
Los sensores de resistencia estaacuten hechos de varios metales y todos se denominan detectores termomeacutetricos de resistencia (RTDs) El teacutermino RTD es uno de los maacutes comuacutenmente usados En los RTDs se usan extensivamente el cobre niacutequel y platino puros Tambieacuten se usan otras aleaciones metaacutelicas Los sensores de resistencia tambieacuten pueden fabricarse de oacutexidos metaacutelicos conocidos como termistores
53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

53
SISTEMA TEacuteRMICO LLENO
Los sensores de temperatura de sistema lleno tienen un pequentildeo bulbo metaacutelico sensible conectado a un sensor de presioacuten con un tubo de pequentildeo calibre Todo el sistema se llena con un fluido y luego se sella hermeacuteticamente Cuando el bulbo se sumerge en un fluido de proceso caliente o friacuteo el fluido en el bulbo asume la misma temperatura del fluido de proceso haciendo que la presioacuten en el bulbo y tubo aumente con la alta temperatura y disminuya con la baja temperatura El sensor de presioacuten responde al cambio de presioacuten moviendo un puntero sobre una escala graduada para indicar la temperatura correspondiente
OTROS SENSORES DE TEMPERATURA
Otros tipos de sensores de temperatura incluyen
Piroacutemetro Este instrumento se usa para detectar muy altas temperaturas en forma remota como la de metales fundidos valieacutendose de los cambios de color
Pintura de cambio de color
Formas y cintas fusibles Las cintas fusibles estaacuten contenidas en los fusibles eleacutectricos
SENSORES DE DENSIDAD
Transmisioacuten de radiacioacuten
Planta de proceso
El dispositivo tiene un transmisor a un costado de la tuberiacutea de pulpa y un receptor en el otro A medida que el haz radioactivo pasa a traveacutes de la pulpa parte de la energiacutea radiante se absorbe La energiacutea absorbida no llega al
54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

54
receptor Mientras mayor es la densidad de la pulpa maacutes energiacutea transmitida se absorbe El grado de absorcioacuten de sentildeal puede calibrarse para producir la densidad de la corriente de pulpa en la tuberiacutea
Balanza de densidad y balde
La densidad de una pulpa puede ser obtenida por un operador de campo usando una balanza de densidad y un balde Este meacutetodo manual puede usarse para verificar la exactitud de los sensores de radiacioacuten Tambieacuten puede usarse para medir corrientes que no tienen sensores de densidad de radiacioacuten
BALANZA DE DENSIDAD
55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

55
56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

56
57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

57
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
58
DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
4DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Los dos tipos principales de dispositivo de control motores de velocidad variable y vaacutelvulas de control
El uso principal y las caracteriacutesticas de una vaacutelvula de compuerta
El uso principal y las caracteriacutesticas de una vaacutelvula de globo
El uso principal y las caracteriacutesticas de una vaacutelvula de mariposa
El uso principal y las caracteriacutesticas de una vaacutelvula de obturacioacuten
El uso principal y las caracteriacutesticas de una vaacutelvula de bola
El uso principal y las caracteriacutesticas de una vaacutelvula de diafragma
El uso principal y las caracteriacutesticas de las paletas
INTRODUCCIOacuteN A LOS DISPOSITIVOS DE CONTROL
INTRODUCCIOacuteN
Una variable del proceso puede ser medida mediante muchos tipos de dispositivos Estos dispositivos estaacuten disentildeados para enviar una sentildeal a un controlador que realiza la funcioacuten de comparacioacuten y produce una sentildeal de salida La salida estaacute destinada a un dispositivo que controla algo que tiene una influencia sobre la variable del proceso Hay muchas formas de medir un proceso y hay varios tipos de modos de controlador Tambieacuten hay una variedad sorprendentemente limitada de dispositivos de control En la praacutectica industrial el dispositivo de control maacutes comuacuten es alguacuten tipo de vaacutelvula Otros dispositivos incluyen motores y controladores de velocidad variable y solenoides Los solenoides a menudo estaacuten adosados a las vaacutelvulas
DISPOSITIVOS DE CONTROL
59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

59
Dispositivos de control eleacutectrico
Los dispositivos de control eleacutectrico son maacutes a menudo motores de velocidad variable En ocasiones se usan motores de posicionamiento para fijar la posicioacuten de un dispositivo de control tal como una vaacutelvula Los motores de velocidad variable tambieacuten se usan para modular la velocidad de una bomba o ventilador
En los motores de velocidad variable la sentildeal de salida del controlador es procesada por el moacutedulo de control de velocidad variable del motor El moacutedulo evaluacutea la sentildeal de salida y determina la velocidad necesaria del motor para satisfacer la salida del controlador En la praacutectica los circuitos eleacutectricos funcionan con voltaje yo amperaje la fuerza de accionamiento para un motor La velocidad y torque de un motor son variados mediante la manipulacioacuten de la frecuencia y voltaje de un motor de corriente alterna (AC) y el voltaje de un motor de corriente continua (DC)
Los motores de posicionamiento eleacutectricos responden a una sentildeal de salida posicionando un dispositivo de control normalmente alguacuten tipo de vaacutelvula en una posicioacuten especiacutefica en el margen de operacioacuten del dispositivo
MOTORES
Vaacutelvulas
En una planta de procesamiento las vaacutelvulas son el tipo maacutes comuacuten de dispositivo de control Se usan para controlar el flujo de fluidos a traveacutes de un sistema de tuberiacuteas La designacioacuten de fluidos se extiende a liacutequidos y gases Aunque una vaacutelvula por definicioacuten controla flujos tambieacuten puede emplearse para sin limitarse a ellas las siguientes aplicaciones
60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

60
Control de nivel
Control de flujo
Control de presioacuten
Control de temperatura
Control de pH
Hay una gran cantidad de tipos de vaacutelvulas disponibles Cada tipo de vaacutelvula tiene caracteriacutesticas especiacuteficas que favorecen varios tipos de control o hacen a una vaacutelvula especiacutefica inapropiada para otros tipos de control A continuacioacuten se presenta una descripcioacuten funcional y fiacutesica de algunos de los tipos de vaacutelvulas de control maacutes comunes y comentarios sobre sus caracteriacutesticas de control
VAacuteLVULAS DE CONTROL
Los siguientes tipos de vaacutelvulas se emplean generalmente en aplicaciones de control de procesos
Vaacutelvula de compuerta
Vaacutelvula de globo
Vaacutelvula de mariposa
Vaacutelvula de obturacioacuten
Vaacutelvula de bola
Vaacutelvula de diafragma
Paletas
61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

61
Vaacutelvula de compuerta
Una vaacutelvula de compuerta tiene una compuerta deslizante que bloquea el flujo Las vaacutelvulas de compuerta son especialmente apropiadas para aislar el flujo normalmente estaacuten totalmente abiertas o totalmente cerradas y generalmente no se usan para modular el flujo El control sensible es difiacutecil de obtener porque un pequentildeo cambio de posicioacuten del vaacutestago de la vaacutelvula produce un gran cambio en la abertura de la compuerta La vaacutelvula debe estar casi totalmente cerrada antes de que pueda obtenerse alguacuten control efectivo La operacioacuten de una vaacutelvula de compuerta en una posicioacuten parcialmente abierta durante un periacuteodo prolongado hace que la compuerta traquetee contra los anillos del asiento Esto lleva al desgaste del asiento Eventualmente la vaacutelvula no podraacute detener el flujo incluso al estar totalmente cerrada Ademaacutes el fluido que fluye a alta velocidad a traveacutes de la vaacutelvula parcialmente abierta corroe el material del disco y asiento nuevamente resultando en una vaacutelvula que no puede detener el flujo de fluido
VAacuteLVULA DE COMPUERTA
Vaacutelvula de globo
Las vaacutelvulas de globo usan un tapoacuten para modular el caudal El tapoacuten de la vaacutelvula de globo es mucho maacutes redondo que en una vaacutelvula de compuerta y el meacutetodo de operacioacuten es diferente Las vaacutelvulas de globo pueden usarse para la aislacioacuten y control Pueden operar continuamente a cualquier abertura sin dantildeo El aacuterea de abertura es proporcional a la elevacioacuten del vaacutestago El tapoacuten de una vaacutelvula de globo puede configurarse para entregar una respuesta lineal casi perfecta entre el porcentaje de abertura y el caudal Esto puede extenderse a la totalidad de la carrera del vaacutestago En contraste una vaacutelvula de compuerta tiacutepica admite un 80 por ciento de flujo a una abertura de soacutelo el 20 por ciento Esto se conoce como la caracteriacutestica de la vaacutelvula y se discute maacutes adelante en mayor
62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

62
detalle Hay muchos tipos diferentes de vaacutelvulas de control de flujo todas basadas en el concepto de la vaacutelvula de globo
VAacuteLVULA DE GLOBO
Vaacutelvula de mariposa
La vaacutelvula de mariposa ilustrada abajo puede usarse tanto para la aislacioacuten como el control Las vaacutelvulas de mariposa son relativamente baratas sin embargo su uso generalmente estaacute limitado a las aplicaciones de baja presioacuten En la posicioacuten totalmente abierta las vaacutelvulas de mariposa tienen mucho menos resistencia al flujo que las vaacutelvulas de globo Ademaacutes un cuarto de vuelta del actuador de la vaacutelvula lleva la vaacutelvula desde la posicioacuten totalmente abierta a la totalmente cerrada La sensibilidad de control es baja debido a la gran abertura para un movimiento relativamente pequentildeo del disco
VAacuteLVULA DE MARIPOSA
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
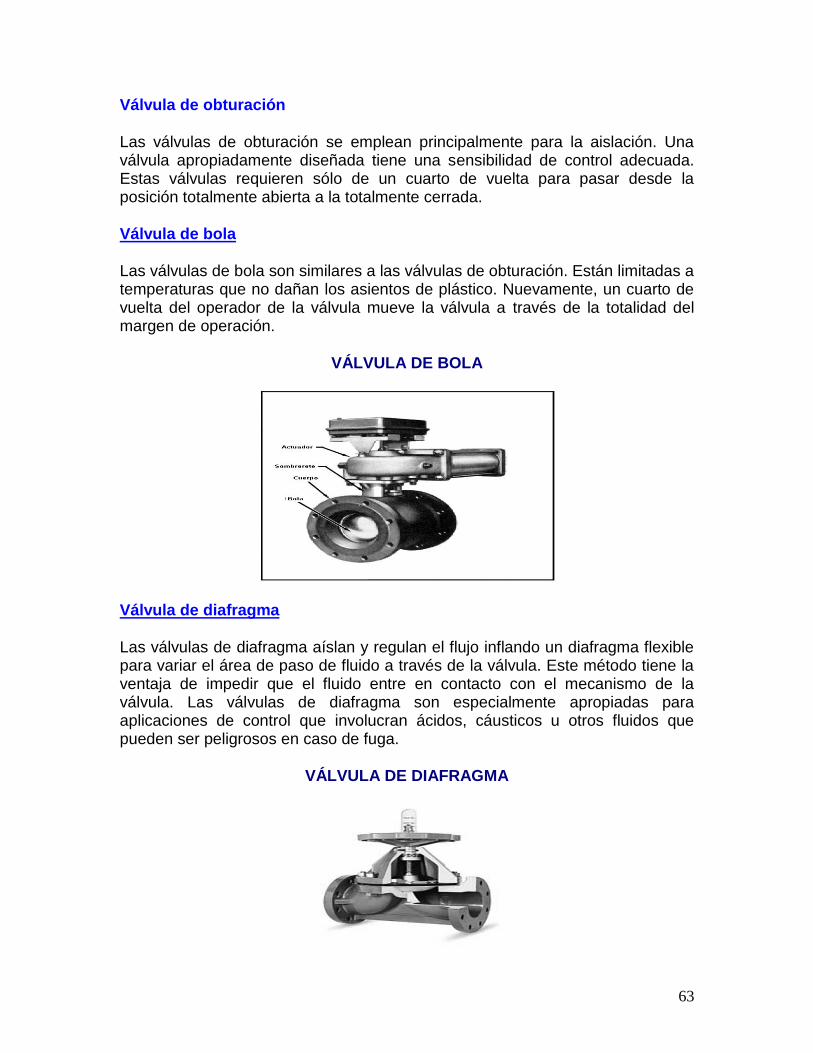
63
Vaacutelvula de obturacioacuten
Las vaacutelvulas de obturacioacuten se emplean principalmente para la aislacioacuten Una vaacutelvula apropiadamente disentildeada tiene una sensibilidad de control adecuada Estas vaacutelvulas requieren soacutelo de un cuarto de vuelta para pasar desde la posicioacuten totalmente abierta a la totalmente cerrada
Vaacutelvula de bola
Las vaacutelvulas de bola son similares a las vaacutelvulas de obturacioacuten Estaacuten limitadas a temperaturas que no dantildean los asientos de plaacutestico Nuevamente un cuarto de vuelta del operador de la vaacutelvula mueve la vaacutelvula a traveacutes de la totalidad del margen de operacioacuten
VAacuteLVULA DE BOLA
Vaacutelvula de diafragma
Las vaacutelvulas de diafragma aiacuteslan y regulan el flujo inflando un diafragma flexible para variar el aacuterea de paso de fluido a traveacutes de la vaacutelvula Este meacutetodo tiene la ventaja de impedir que el fluido entre en contacto con el mecanismo de la vaacutelvula Las vaacutelvulas de diafragma son especialmente apropiadas para aplicaciones de control que involucran aacutecidos caacuteusticos u otros fluidos que pueden ser peligrosos en caso de fuga
VAacuteLVULA DE DIAFRAGMA
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
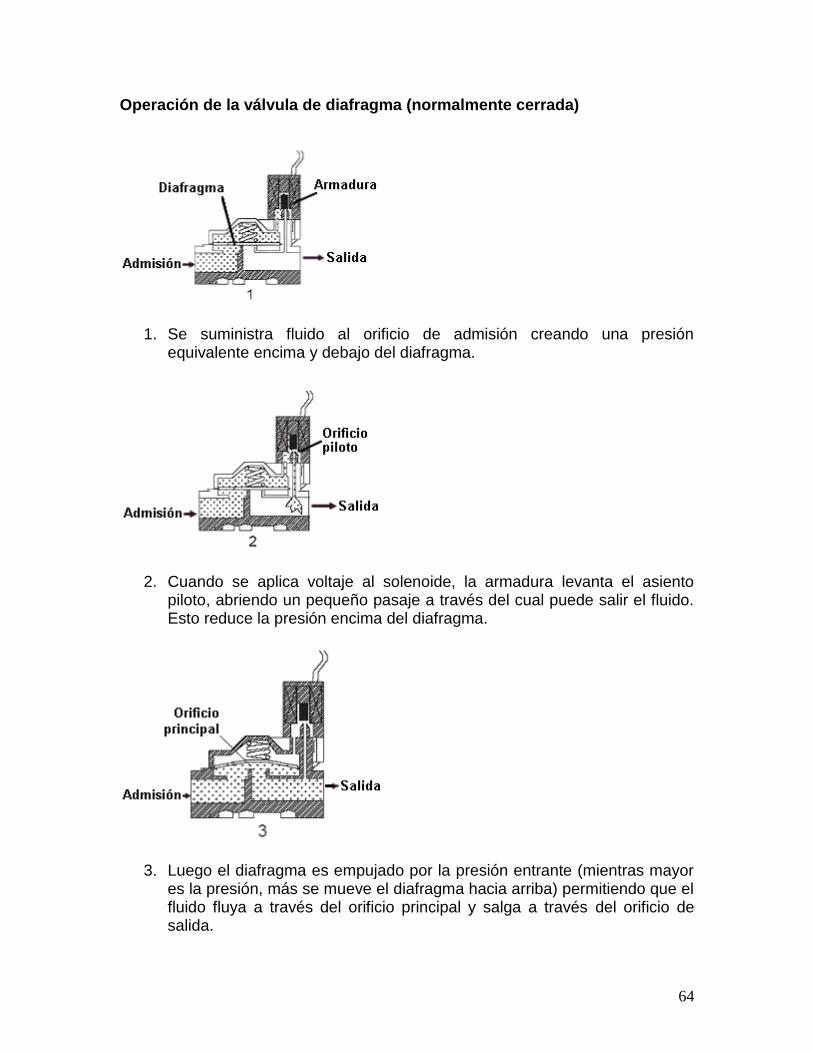
64
Operacioacuten de la vaacutelvula de diafragma (normalmente cerrada)
1 Se suministra fluido al orificio de admisioacuten creando una presioacuten equivalente encima y debajo del diafragma
2 Cuando se aplica voltaje al solenoide la armadura levanta el asiento piloto abriendo un pequentildeo pasaje a traveacutes del cual puede salir el fluido Esto reduce la presioacuten encima del diafragma
3 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

65
Operacioacuten de la vaacutelvula de diafragma (normalmente abierta)
1 Cuando el solenoide se desenergiza la armadura estaacute en reposo permitiendo que el fluido fluya a traveacutes del orificio piloto hacia la tuberiacutea de suministro y orificio de salida Esto reduce la presioacuten encima del diafragma
2 Luego el diafragma es empujado por la presioacuten entrante (mientras mayor es la presioacuten maacutes se mueve el diafragma hacia arriba) permitiendo que el fluido fluya a traveacutes del orificio principal y salga a traveacutes del orificio de salida
3 Cuando se aplica voltaje al solenoide la armadura levanta el asiento de apoyo y cierra el orificio piloto bloqueando el flujo de alivio de presioacuten encima del diafragma Se acumula presioacuten encima el diafragma forzando el diafragma hacia abajo cerrando el orificio principal y deteniendo el flujo hacia el orificio de salida
66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

66
Paletas
Las paletas se usan principalmente para regular el flujo Normalmente funcionan como un grupo de vaacutelvulas de mariposa Estaacuten limitadas a aplicaciones de baja presioacuten y generalmente exhiben mejor sensibilidad que una vaacutelvula de mariposa Habitualmente se instalan en la admisioacuten de ventiladores de aire y gases de proceso para modular con precisioacuten el flujo de su descarga mientras su motor de accionamiento funciona a velocidad constante
PALETAS
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
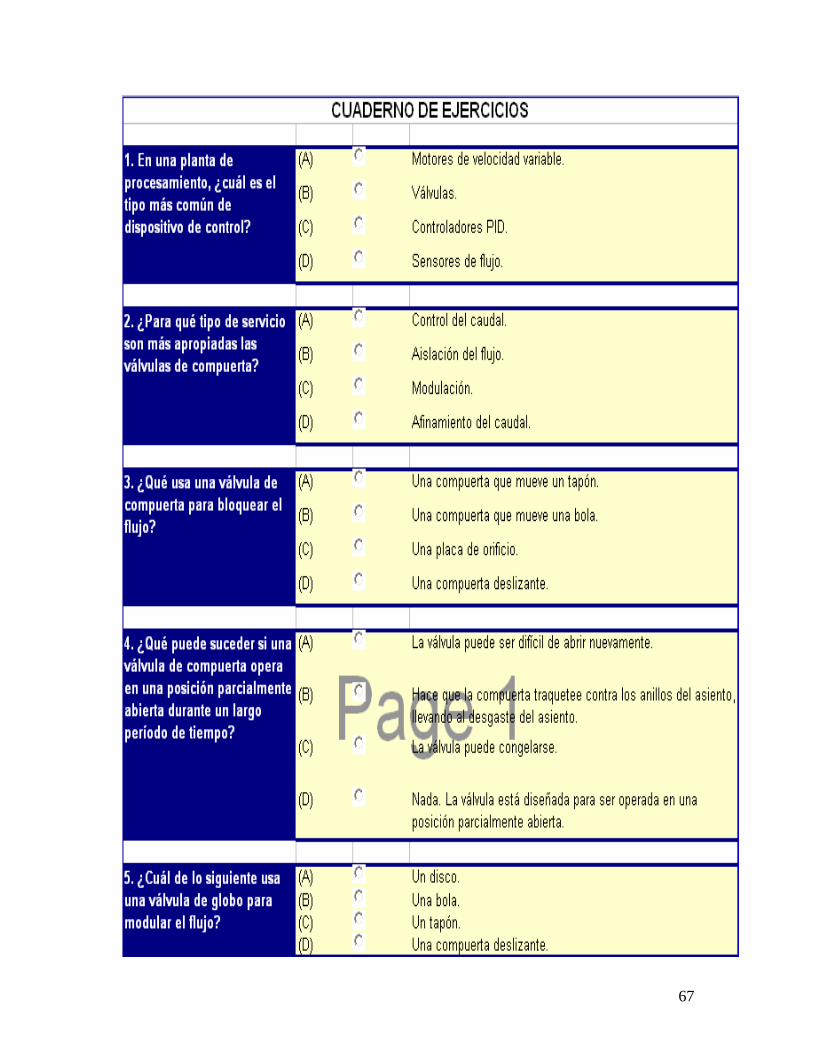
67
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
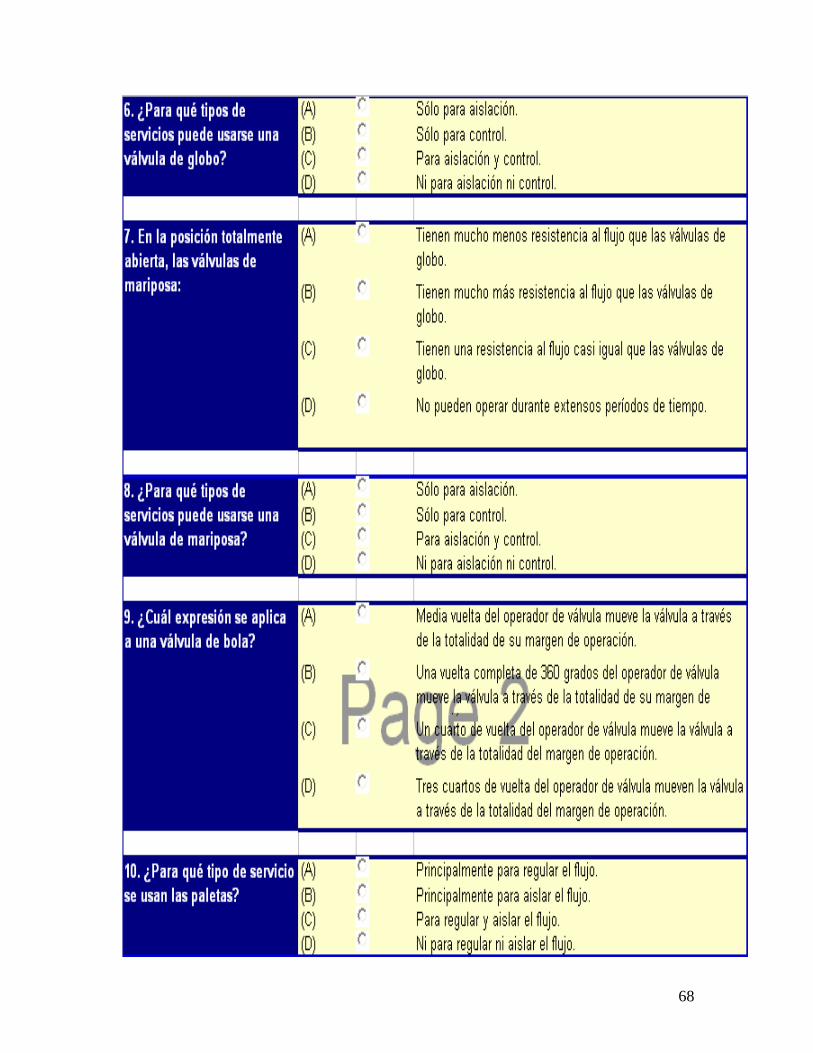
68
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
69
DIAGNOSTICO Y CORRECCION DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
OBJETIVOS DE APRENDIZAJE
5DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
Al terminar de estudiar este moacutedulo el participante debe ser capaz de describir
Coacutemo identificar problemas asociados con los controladores y dispositivos de control
Una estrategia loacutegica para diagnosticar y corregir problemas en controladores y dispositivos de control
DIAGNOacuteSTICO Y CORRECCIOacuteN DE FALLAS EN CONTROLADORES Y DISPOSITIVOS DE CONTROL
PLANTA DE PROCESOS
Diagnoacutestico y correccioacuten de fallas
Comience suponiendo que la sentildeal del sensor de campo estaacute correcta El sensor puede comprobarse adicionalmente maacutes tarde si se encuentra que otras partes del lazo funcionan correctamente El meacutetodo general consiste en comenzar con el controlador para ver si estaacute funcionando correctamente Si el controlador parece estar funcionando el proacuteximo paso seraacute revisar el dispositivo de control final Esto requeriraacute que el operador de la sala de control enviacutee un operador de campo para revisarlo Las revisiones de campo incluyen ver si la vaacutelvula de control (u otro dispositivo) se estaacute moviendo en la direccioacuten correcta Otras
70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

70
revisiones incluyen asegurar que la presioacuten de aire para instrumentos es correcta Generalmente estas revisiones identificaraacuten el problema
Puede usarse la secuencia siguiente como una lista de control para el diagnoacutestico y correccioacuten de fallas en un lazo de control
1 Verifique que la salida del controlador del proceso tenga sentido sobre la base de la desviacioacuten entre la variable y el punto de referencia Por ejemplo suponga que el nivel en un sumidero es controlado modulando una vaacutelvula de control en el cajoacuten de descarga del sumidero Al operar normalmente la vaacutelvula se modula a su posicioacuten abierta a medida que aumenta el nivel lo cual aumenta la velocidad de descarga Esto disminuye el nivel A medida que el nivel disminuye la vaacutelvula se modula a su posicioacuten cerrada para reducir la velocidad de descarga Esto aumenta el nivel
Si el operador advierte que el nivel del sumidero es muy alto posiblemente porque se activoacute una alarma su primer paso seraacute revisar la salida del controlador de nivel Podemos esperar ver la salida alta y aumentando para que abra la vaacutelvula de control de descarga (suponiendo que la salida del controlador es de actuacioacuten directa) Si la salida del controlador no estaacute haciendo lo que el operador espera revise para ver que el controlador estaacute en modo Automaacutetico Si no estaacute en Automaacutetico el controlador no haraacute ninguacuten control Si el controlador estaacute en modo Automaacutetico y no estaacute actuando correctamente revise el punto de referencia Si el punto de referencia no es correcto ajuacutestelo seguacuten sea necesario Si el punto de referencia es correcto el operador puede cambiar al modo Manual En Manual el operador puede aumentar la salida manualmente Esto modularaacute la vaacutelvula de control de descarga hacia una posicioacuten maacutes abierta para controlar el nivel Si la salida del controlador no estaacute funcionando como debiera el departamento de instrumentacioacuten deberaacute ser notificado
2 Si el operador determina que el controlador estaacute actuando correctamente el paso siguiente seraacute revisar el dispositivo de control final en el campo para determinar si estaacute funcionando correctamente Ejemplos de dispositivos de control final incluyen
Vaacutelvulas de control
Motores de velocidad variable
En nuestro ejemplo el dispositivo de control final es una vaacutelvula de control operada mediante un actuador neumaacutetico Para que la vaacutelvula de control opere correctamente requiere de aire comprimido El aire comprimido se entrega mediante un compresor de aire para instrumentos Primero revise para ver si la vaacutelvula (u otro dispositivo) se ha movido seguacuten lo solicitado por la salida del controlador En el ejemplo deberaacute estar totalmente abierta Si no lo estaacute revise que haya suficiente presioacuten de aire para instrumentos La vaacutelvula no funcionaraacute
71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

71
si no hay suficiente presioacuten de aire en el transductor El transductor convierte la sentildeal electroacutenica del controlador (salida de 4 a 20 mA) en una sentildeal neumaacutetica (3 a 15 psi) La presioacuten puede revisarse en el manoacutemetro ubicado en el transductor Si el dispositivo de control final es un motor de velocidad variable el motor puede revisarse en el campo para ver si estaacute respondiendo a la salida del controlador
3 Si tanto el controlador como el dispositivo de control final parecen funcionar correctamente revise el proceso sobre el cual actuacutea el dispositivo de control final En nuestro ejemplo el alto nivel en el sumidero puede ser causado por un bloqueo fiacutesico en el cajoacuten de descarga aguas arriba de la vaacutelvula de control El bloqueo puede estar obstruyendo el flujo impidiendo que la vaacutelvula de control haga su trabajo
4 Finalmente revise el sensor en el campo El sensor en el ejemplo provee la medicioacuten de nivel para el controlador Esta revisioacuten normalmente puede hacerse yendo hasta el sensor y verificando con un dispositivo de medicioacuten independiente tal como un indicador de nivel
Afinamiento del controlador
En ocasiones la condicioacuten deseada del proceso no puede obtenerse porque el controlador no estaacute correctamente afinado La figura ilustra un ejemplo de un problema de afinamiento de un controlador Antes de afinar el proceso era inestable con grandes oscilaciones en la variable controlada salida del controlador y movimiento de vaacutelvula Despueacutes de afinar la variable del proceso es maacutes estable con menores oscilaciones en la salida y movimiento de vaacutelvula
AFINAMIENTO DEL CONTROLADOR
72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

72
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
73
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
OBJETIVOS DE APRENDIZAJE
6DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Explicar la diferencia entre un problema del proceso y un problema de control del proceso
Describir el procedimiento que se debe usar para determinar si el problema estaacute relacionado con el proceso o con el control del proceso
Dar un ejemplo de un problema de control del proceso y coacutemo identificarlo
DISTINCIONES ENTRE PROBLEMAS DE CONTROL DEL PROCESO Y PROBLEMAS DE PROCESO
DESCRIPCIOacuteN
Los problemas de control del proceso se relacionan con dificultades con los instrumentos que controlan un proceso Estos problemas pueden relacionarse con errores de medicioacuten en los sensores de campo Pueden involucrar problemas de transmisioacuten de sentildeal o funcionamientos DCS incorrectos Otros problemas pueden relacionarse con el aire para instrumentos o calibracioacuten de los elementos de control final
74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

74
Por otro lado los problemas de proceso representan dificultades con el proceso mismo no con la instrumentacioacuten El proceso requiere que las fuerzas fiacutesicas yo quiacutemicas actuacuteen sobre una corriente de alimentacioacuten para cumplir un objetivo El equipo de proceso yo reactivos proveen estas fuerzas Cualquier problema que ocurra con el equipo de proceso o reactivos resulta en un problema de proceso no un problema de control del proceso
Ejemplo de nivel del sumidero de descarga del molino
Suponga que hay una alarma de alto nivel en un sumidero de alimentacioacuten del cicloacuten primario Tambieacuten suponga que el lazo de control de nivel opera como sigue Una bomba de velocidad variable en el lado de descarga del sumidero aumenta su velocidad para disminuir el nivel del sumidero Disminuye su velocidad para aumentar el nivel del sumidero Al activarse una alarma el operador debe determinar si la alarma es el resultado de un problema de control del proceso o del proceso mismo En este ejemplo el nivel del sumidero es controlado automaacuteticamente mediante una bomba de alimentacioacuten del cicloacuten de velocidad variable A medida que aumenta el nivel en el sumidero aumenta la velocidad de la bomba Esto aumenta la velocidad de bombeo de pulpa fuera del sumidero El primer paso seraacute determinar si el lazo de control de nivel estaacute funcionando correctamente Para propoacutesitos del ejemplo suponga que el lazo de control de nivel parece estar haciendo lo que debe como sigue
Las sentildeales del sensortransmisor son buenas y estaacuten dentro del alcance
La salida del controlador estaacute pidiendo a la bomba que aumente su velocidad para aumentar la velocidad de bombeo
La bomba estaacute de hecho operando en o cerca del 100 por ciento de su velocidad
Habiendo determinado que el lazo de control estaacute funcionando seguacuten fue disentildeado a continuacioacuten el operador necesita evaluar coacutemo el proceso mismo estaacute respondiendo a medida que el elemento de control final es ajustado por la salida del controlador Las mediciones de variables especiacuteficas asociadas con el proceso pueden suministrar la mejor evidencia de la respuesta del proceso
75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

75
Dos variables del proceso que deben estar respondiendo al aumento de velocidad de la bomba son el caudal y la presioacuten de descarga de la bomba de alimentacioacuten del cicloacuten Revise el manoacutemetro que mide la presioacuten del colector del cicloacuten El operador puede revisar esta presioacuten para verificar que la presioacuten de alimentacioacuten del cicloacuten ha aumentado a medida que aumenta la velocidad de la bomba del cicloacuten Para propoacutesitos de este ejemplo suponga que la presioacuten es maacutes baja que lo normal Tambieacuten suponga que no estaacute aumentando con la velocidad de la bomba La nueva evidencia nos dice que aunque la velocidad de la bomba ha aumentado la presioacuten y por ende la velocidad de bombeo no ha aumentado De hecho es mas baja que lo normal El operador puede ahora deducir que algo anda mal con la bomba de alimentacioacuten del cicloacuten Por ejemplo si el impulsor de la bomba estaacute desgastado y necesita cambiarse el aumento de la velocidad de la bomba no produciraacute el aumento de la velocidad de bombeo requerido para controlar correctamente el nivel del sumidero
Este ejemplo es representativo de un problema de proceso ya que la instrumentacioacuten de control del proceso estaacute operando correctamente Es la bomba un equipo de proceso la que tiene un problema
76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

76
DIAGRAMAS DE TUBERIAS E INSTRUMENTACION (PampIDs)
OBJETIVOS DE APRENDIZAJE
7DIAGRAMAS DE TUBERIacuteAS E INSTRUMENTACIOacuteN (PampIDs)
Al terminar de estudiar este moacutedulo el participante debe ser capaz de
Identificar varios tipos de instrumentos que aparecen en los PampIDs
Identificar varios tipos de siacutembolos de liacutenea que aparecen en los PampIDs
Identificar varios tipos de vaacutelvulas y activadores que aparecen en los PampIDs
Identificar varios tipos de motores y accionamientos que aparecen en los PampIDs
Interpretar las leyendas de los PampIDs
Interpretar y describir los lazos de control tal como aparecen en los PampIDs
INTRODUCCIOacuteN
Los sistemas de instrumentacioacuten se usan para monitorear indicar y controlar las condiciones en un sistema de proceso Los diagramas usados para identificar la instrumentacioacuten se conocen como diagramas de tuberiacutea e instrumentacioacuten o PampIDs (por sus siglas en ingleacutes) Los PampIDs representan simboacutelicamente los componentes de un sistema de tuberiacuteas y la instrumentacioacuten conectada al sistema Se asocian comuacutenmente con los sistemas de fluidos pero no entregan ubicaciones precisas de equipos o instrumentos
Ya que la mayor parte de la informacioacuten sobre condiciones de proceso proviene de los instrumentos es extremadamente importante para el personal conocer la ubicacioacuten de los instrumentos en un sistema El personal que conoce doacutende se ubican los instrumentos y el motivo por el cual se seleccionoacute la ubicacioacuten particular tiene una mejor idea de cuaacuteles condiciones estaacuten presentes en un sistema y los factores que pueden afectar a esas condiciones
Al completar con eacutexito el moacutedulo de Lectura de PampIDs el participante debe ser capaz de demostrar las siguientes habilidades
Identificar los varios tipos de instrumentos
Identificar los varios tipos de siacutembolos de liacuteneas
Interpretar los PampIDs
Interpretar las leyendas de los PampIDs
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
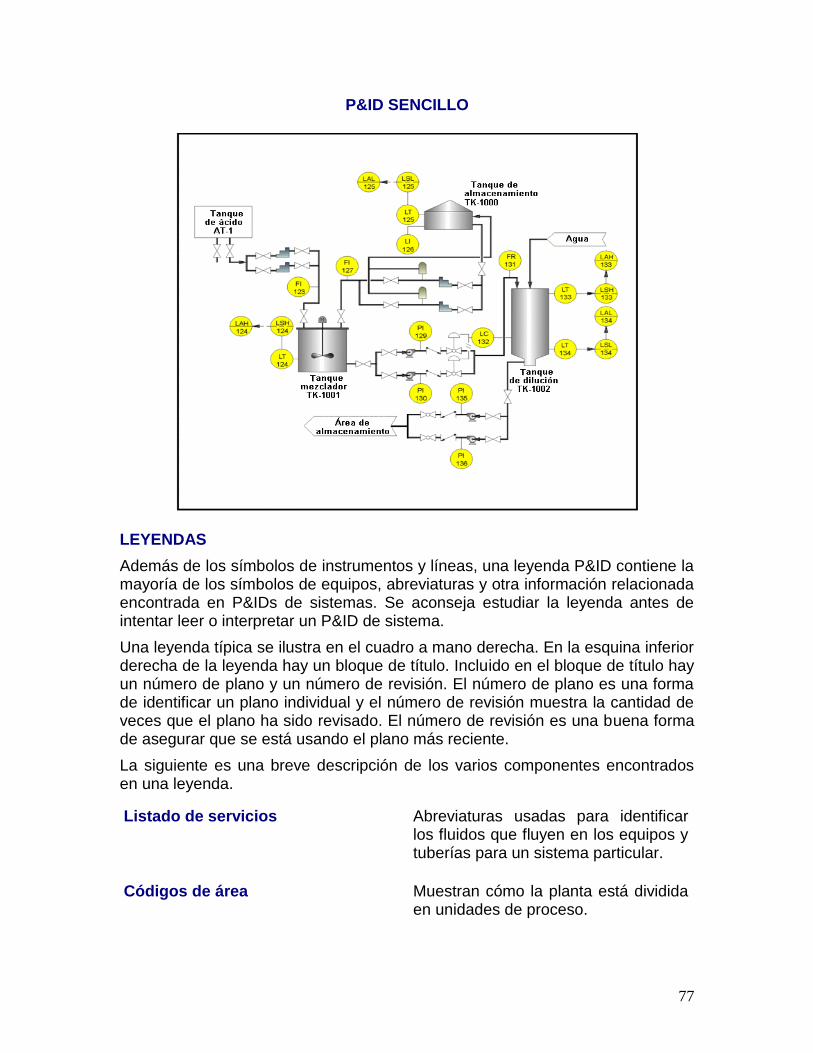
77
PampID SENCILLO
LEYENDAS
Ademaacutes de los siacutembolos de instrumentos y liacuteneas una leyenda PampID contiene la mayoriacutea de los siacutembolos de equipos abreviaturas y otra informacioacuten relacionada encontrada en PampIDs de sistemas Se aconseja estudiar la leyenda antes de intentar leer o interpretar un PampID de sistema
Una leyenda tiacutepica se ilustra en el cuadro a mano derecha En la esquina inferior derecha de la leyenda hay un bloque de tiacutetulo Incluido en el bloque de tiacutetulo hay un nuacutemero de plano y un nuacutemero de revisioacuten El nuacutemero de plano es una forma de identificar un plano individual y el nuacutemero de revisioacuten muestra la cantidad de veces que el plano ha sido revisado El nuacutemero de revisioacuten es una buena forma de asegurar que se estaacute usando el plano maacutes reciente
La siguiente es una breve descripcioacuten de los varios componentes encontrados en una leyenda
Listado de servicios Abreviaturas usadas para identificar los fluidos que fluyen en los equipos y tuberiacuteas para un sistema particular
Coacutedigos de aacuterea Muestran coacutemo la planta estaacute dividida en unidades de proceso
78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

78
Siacutembolos de equipos Muestran los equipos principales usados en la planta
Siacutembolos de vaacutelvulas Muestran los varios tipos de vaacutelvulas usadas en la planta y tambieacuten la posicioacuten de la vaacutelvula durante la operacioacuten normal
Material de tuberiacuteas Indica el tipo de material con el cual estaacute construida la tuberiacutea para el tipo de material siendo procesado
Siacutembolos de tuberiacuteas Indican auxiliares de tuberiacuteas como tamices silenciadores etc
LEYENDA TIacutePICA
SIacuteMBOLOS DE INSTRUMENTOS
El siacutembolo estaacutendar usado para representar la mayoriacutea de los instrumentos es un ciacuterculo conteniendo letras y nuacutemeros Las letras indican la funcioacuten especiacutefica del instrumento y los nuacutemeros un nuacutemero de lazo uacutenico que identifica la ubicacioacuten del instrumento Por ejemplo el siacutembolo en la figura a la derecha es el siacutembolo para un indicador de nivel conectado a un tanque de almacenamiento La ldquoLrdquo muestra que el instrumento estaacute midiendo nivel (Level en ingleacutes) y la ldquoIrdquo significa que es un indicador El nuacutemero de lazo 126 se ha disentildeado para este
79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

79
tanque y le indica al operador o mecaacutenico instrumentista que el indicador de nivel estaacute montado en el Tanque de almacenamiento TK-1000
SIacuteMBOLO DE INSTRUMENTO
Los significados de las letras en un siacutembolo de instrumento pueden encontrarse en un diagrama de leyenda PampID La primera columna muestra un listado alfabeacutetico de las letras La segunda columna indica la variable principal siendo medidamdashpor ejemplo ldquoPrdquo significa que se estaacute midiendo presioacuten (Pressure en ingleacutes) o vaciacuteo La tercera columna muestra coacutemo se modifica la variable principalmdashpor ejemplo ldquoPDrdquo indica un instrumento tipo diferencia de presioacuten La cuarta columna representa la funcioacuten del instrumentomdashpor ejemplo ldquoIrdquo significa que es un instrumento indicador La quinta columna representa la funcioacuten de salida del instrumentomdashpor ejemplo ldquoCrdquo indica que es un controlador La sexta columna indica cualquier modificacioacuten de la salidamdashpor ejemplo ldquoTAHrdquo indica que es una alarma de alta temperatura (Temperature Alarm High en ingleacutes)
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA
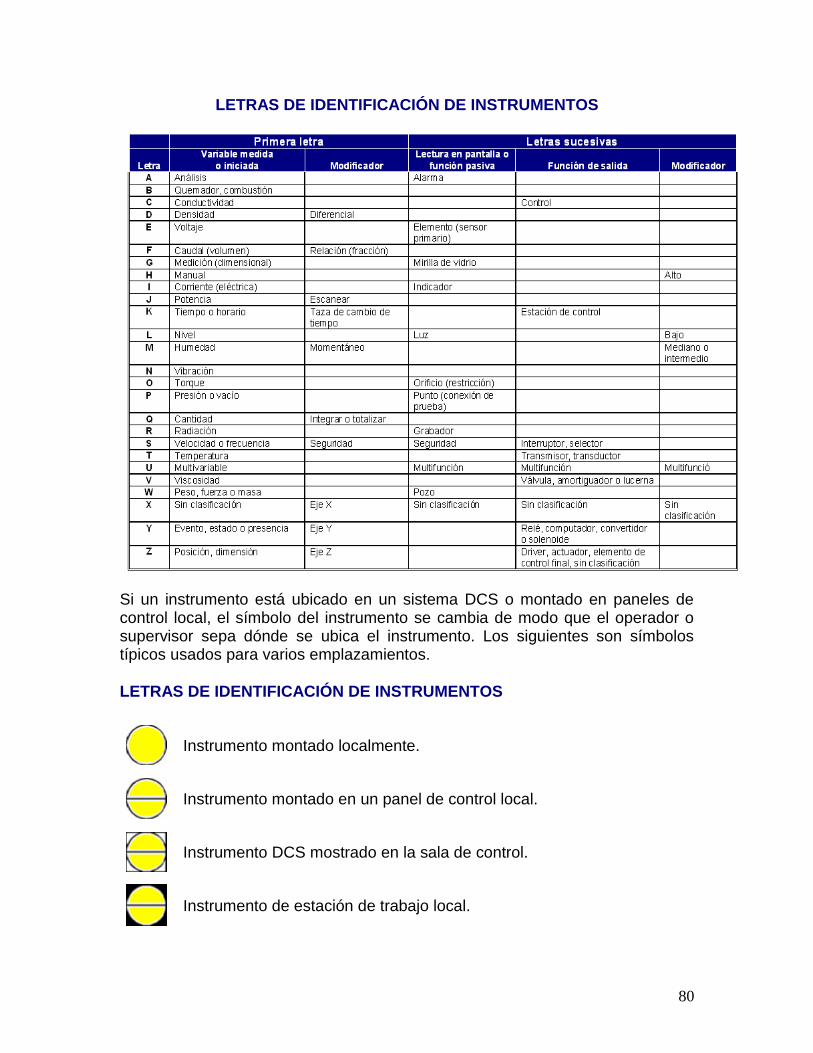
80
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Si un instrumento estaacute ubicado en un sistema DCS o montado en paneles de control local el siacutembolo del instrumento se cambia de modo que el operador o supervisor sepa doacutende se ubica el instrumento Los siguientes son siacutembolos tiacutepicos usados para varios emplazamientos
LETRAS DE IDENTIFICACIOacuteN DE INSTRUMENTOS
Instrumento montado localmente
Instrumento montado en un panel de control local
Instrumento DCS mostrado en la sala de control
Instrumento de estacioacuten de trabajo local
81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

81
EJEMPLOS DE PampID
PampID DE UN TANQUE MEZCLADOR
La figura a la derecha muestra un tanque mezclador y los instrumentos asociados con eacutel El instrumento LT-124 es un transmisor de nivel montado localmente El transmisor de nivel estaacute conectado mediante tuberiacutea neumaacutetica con un interruptor de alto nivel (LSH-124) Como se indica en la tabla de letras de identificacioacuten de instrumentos la letra ldquoHrdquo en la tercera posicioacuten significa que el nivel es alto Si el nivel en el tanque mezclador se hace muy alto el interruptor de alto nivel (LSH-124) enviacutea una sentildeal eleacutectrica a una alarma de alto nivel montada remotamente (LAH-124) La alarma es activada por la sentildeal eleacutectrica para advertir al operador que el nivel en el tanque mezclador es alto de modo que pueda tomar la accioacuten correctiva apropiada
Otros instrumentos conectados al tanque mezclador son un indicador de temperatura montado localmente (TI-128) y dos indicadores de flujo (FI-123 y FI-127)
82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

82
Desde el tanque mezclador el flujo pasa a traveacutes de una serie de bombas y vaacutelvulas hacia un tanque de dilucioacuten El tanque de dilucioacuten tiene varios dispositivos sensibles al nivel como tambieacuten un registrador de flujo (FR-131) para registrar el volumen de solucioacuten fluyendo hacia el tanque de dilucioacuten desde el tanque mezclador
PampID DE UN TANQUE DE DILUCIOacuteN
83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA

83
El nivel en el tanque de dilucioacuten es controlado mediante el controlador de nivel (LC-132) el cual estaacute conectado mediante tuberiacutea neumaacutetica a dos vaacutelvulas de globo que controlan el flujo desde el tanque mezclador hacia el tanque de dilucioacuten Esta disposicioacuten estaacute disentildeada para controlar el nivel del tanque ajustando automaacuteticamente los caudales Si el nivel del tanque estaacute por encima o debajo de los puntos preajustados la salida del controlador de nivel cierra o abre las vaacutelvulas de globo La accioacuten de la vaacutelvula ajusta la cantidad de solucioacuten que fluye dentro del tanque de dilucioacuten lo que a su vez controla el nivel en el tanque
Hay otros dos juegos de instrumentos de nivel similares a los instrumentos de nivel previamente descritos para el tanque mezclador Un juego de instrumentos (LT-133 y LSH-133) se usa para activar una alarma de alto nivel (LAH-133) El otro juego de instrumentos (LT-134 y LSL-134) se usa para activar una alarma de bajo nivel (LAL-134)
Desde el tanque de dilucioacuten la solucioacuten es bombeada hacia un aacuterea de almacenamiento mediante dos bombas centriacutefugas Cada bomba estaacute equipada con un indicador de presioacuten montado localmente (PI-135 y PI-136) Cuando la bomba estaacute operando la lectura en el indicador de presioacuten deberaacute estar dentro de un margen especificado El operador y supervisor usan esta indicacioacuten de presioacuten para determinar si la bomba estaacute operando correctamente o si es necesario tomar medidas correctivas
PampID DE UNA BOMBA CENTRIacuteFUGA