
Introduccio´n a la teor´ıa del riesgo -...
283
Introducci´ on a la teor´ ıa del riesgo Luis Rinc´ on Departamento de Matem´ aticas Facultad de Ciencias UNAM Circuito Exterior de CU 04510 M´ exico DF Agosto 2012
Transcript of Introduccio´n a la teor´ıa del riesgo -...

Introduccion a lateorıa del riesgo
Luis Rincon
Departamento de Matematicas
Facultad de Ciencias UNAM
Circuito Exterior de CU
04510 Mexico DF
Agosto 2012

Prologo
El presente texto contiene material basico para un curso introductorio aciertos temas de la teorıa del riesgo aplicada a seguros. Esta basado en elcurso semestral de Teorıa del Riesgo que el autor ha impartido a estudian-tes de ultimo semestre de la carrera de Actuarıa en la Facultad de Cien-cias de la UNAM. La intencion es que este libro sea de alguna ayuda paralos numerosos alumnos de las distintas escuelas de actuarıa y matematicasaplicadas de paıses de habla hispana, y contribuya tambien a apoyar el tra-bajo docente de sus profesores. El texto fue escrito en el sistema LATEX ylas ilustraciones fueron elaboradas usando el paquete pstricks. El materialque se presenta fue compilado enteramente de las fuentes bibliograficas queaparecen al final del texto. La ultima version disponible de este texto en suformato digital puede encontrarse en la pagina web
http://www.matematicas.unam.mx/lars
Agradezco sinceramente los comentarios, correcciones y sugerencias que herecibido por parte de alumnos y profesores para mejorar este material. Enparticular agradezco a uno de los revisores anonimos, quien dedico bastantetiempo en la lectura cuidadosa del texto y quien sugirio importantes mejoraspara la version final. Agradezco tambien el apoyo otorgado por parte de laUNAM DGAPA a traves del proyecto PAPIME PE103111, con el cual pudoser posible el desarrollo y la edicion de este trabajo. Toda comunicaciondirigida al autor puede enviarse a la cuenta de correo que aparece abajo.
Luis RinconAgosto 2012
Ciudad Universitaria [email protected]

Contenido
1. El modelo individual y el modelo colectivo 1
1.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Modelo individual . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Formula de De Pril . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4. Modelo colectivo . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5. Modelo colectivo Poisson . . . . . . . . . . . . . . . . . . . . . 25
1.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2. Formula de Panjer y metodos de aproximacion 45
2.1. Formula de Panjer . . . . . . . . . . . . . . . . . . . . . . . . 45
2.2. Aproximacion normal . . . . . . . . . . . . . . . . . . . . . . 53
2.3. Aproximacion gama trasladada . . . . . . . . . . . . . . . . . 55
2.4. Aproximacion de Edgeworth . . . . . . . . . . . . . . . . . . . 56
2.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3. Principios para el calculo de primas 69
3.1. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.2. Principios generales . . . . . . . . . . . . . . . . . . . . . . . . 71
3.3. Primas y funciones de utilidad . . . . . . . . . . . . . . . . . 80
3.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4. Reaseguro 91
4.1. Reaseguro proporcional . . . . . . . . . . . . . . . . . . . . . 93
4.2. Reaseguro no proporcional . . . . . . . . . . . . . . . . . . . . 95
4.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
iii

iv Contenido
5. Teorıa de la credibilidad 109
5.1. Credibilidad clasica . . . . . . . . . . . . . . . . . . . . . . . . 110
5.2. Credibilidad Bayesiana . . . . . . . . . . . . . . . . . . . . . . 117
5.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6. Procesos estocasticos 127
6.1. Conceptos elementales . . . . . . . . . . . . . . . . . . . . . . 127
6.2. Filtraciones y tiempos de paro . . . . . . . . . . . . . . . . . 130
6.3. Caminatas aleatorias . . . . . . . . . . . . . . . . . . . . . . . 132
6.4. Cadenas de Markov . . . . . . . . . . . . . . . . . . . . . . . 134
6.5. Proceso de Poisson . . . . . . . . . . . . . . . . . . . . . . . . 140
6.6. Cadenas de Markov a tiempo continuo . . . . . . . . . . . . . 143
6.7. Martingalas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
7. Teorıa de la ruina: tiempo discreto 163
7.1. Un proceso de riesgo a tiempo discreto . . . . . . . . . . . . . 163
7.2. Probabilidad de ruina con horizonte infinito . . . . . . . . . . 167
7.3. Probabilidad de ruina con horizonte finito . . . . . . . . . . . 175
7.4. Coeficiente de ajuste . . . . . . . . . . . . . . . . . . . . . . . 177
7.5. Desigualdad de Lundberg . . . . . . . . . . . . . . . . . . . . 180
7.6. Severidad de la ruina . . . . . . . . . . . . . . . . . . . . . . . 184
7.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
8. Teorıa de la ruina: tiempo continuo 197
8.1. Modelo clasico de Cramer-Lundberg . . . . . . . . . . . . . . 197
8.2. Probabilidad de ruina con horizonte infinito . . . . . . . . . . 202
8.3. Probabilidad de ruina con horizonte finito . . . . . . . . . . . 208
8.4. Severidad de la ruina . . . . . . . . . . . . . . . . . . . . . . . 213
8.5. El coeficiente de ajuste . . . . . . . . . . . . . . . . . . . . . . 218
8.6. Desigualdad de Lundberg . . . . . . . . . . . . . . . . . . . . 227
8.7. Aproximacion de De Vylder . . . . . . . . . . . . . . . . . . . 233
8.8. Formula de Pollaczek-Khinchin . . . . . . . . . . . . . . . . . 235
8.9. Probabilidad de ruina con reclamaciones tipo fase . . . . . . . 240
8.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
Apendice: Formulario y resultados varios 245
Contenido v
Bibliografıa 271
Indice analıtico 274

Capıtulo 1
El modelo individualy el modelo colectivo
En este capıtulo se presenta una introduccion al esquema del seguro y alconcepto general de riesgo. Se presentan ademas las perspectivas individualy colectiva para modelar el riesgo correspondiente al conjunto de reclama-ciones que afronta una companıa aseguradora. Se estudian tambien algunaspropiedades y relaciones entre estas dos perspectivas. En el resto del textose adopta el modelo colectivo como modelo fundamental.
1.1. Introduccion
El termino riesgo tiene muchas acepciones dependiendo del area de estudioque se trate y en terminos imprecisos puede definirse como la posibilidadde experimentar ciertos eventos de interes y las consecuencias derivadas dedichos eventos. Los riesgos pueden tener un sentido positivo o negativo, peroen general tienen una connotacion de perdida. El objetivo es identificar losriesgos, ponderarlos con base en sus consecuencias, decidir la aceptacion ono de los mismos y tomar provecho de su existencia. Por lo tanto no setrata necesariamente de evitarlos o de protegerse contra ellos. El quehacercotidiano del hombre, ya sea en el ambito personal o profesional, implicanecesariamente y a cada momento hacer frente a ciertos riesgos, y ello puedetener consecuencias no deseadas, pero tambien puede ofrecer oportunidades.Por ejemplo, el comprar un boleto de loterıa conlleva el riesgo de perder el
1

2 1. El modelo individual y el modelo colectivo
importe pagado por el boleto, pero al mismo tiempo la posibilidad de ganaruna gran cantidad de dinero. Cada uno de nosotros pondera estas dos posi-bilidades de manera distinta y toma una decision al respecto. Otro ejemploen donde es evidente la evaluacion (a veces inconsciente) de los riesgos escuando una persona decide viajar en avion. En este caso se considera pri-mordial la rapidez y comodidad del viaje, y se desdena convenientementecualquier posibilidad de accidente.
Como hemos mencionado, el termino riesgo se define de manera distintadependiendo de la disciplina de estudio. En ingenierıa, por ejemplo, puededefinirse el riesgo como el producto de la probabilidad de que un evento nodeseable ocurra y el dano esperado debido a la ocurrencia del evento, es de-cir, Riesgo=(Probabilidad de un accidente)(Danos como consecuencia delaccidente). En finanzas puede definirse el riesgo en terminos de la variaciono volatilidad de una inversion, o tambien como la posible perdida en unainversion; en general, se considera que una inversion en la bolsa de valores(tasa de interes variable) es mas riesgosa comparada con una inversion en unbanco (tasa de interes fija). Finalmente, en seguros, el riesgo puede definirsecomo el monto de las reclamaciones totales de los asegurados. Veremos acontinuacion con mas detalle este ultimo caso pues es al que estan dirigidosprincipalmente los modelos matematicos que estudiaremos.
A grandes rasgos, la forma en la que opera un seguro es la siguiente: ungrupo de personas reconocen que estan expuestas a sufrir algun tipo desiniestro en sus bienes o en sus personas, y que dichos siniestros puedencausarles consecuencias irreparables, como la perdida de sus vidas, o bien,perdidas economicas considerables. Al contratar un seguro (es decir, firmaruna poliza de seguro), cada una de estas personas paga por adelantado unacantidad de dinero (generalmente pequena) llamada prima a una companıaaseguradora, quien se compromete a resarcir monetariamente a todas aque-llas personas aseguradas que sufrieron algun siniestro durante el tiempo devigencia del seguro y segun las condiciones especificadas en la poliza delseguro. De esta manera, aunque no se conozca de manera individual a laspersonas que sufriran un siniestro, el capital obtenido de manera colectivadebe ser suficiente para solventar los gastos de los siniestros individualesque se presenten. Es claro que bajo este mecanismo las perdidas economicas

1.2. Modelo individual 3
individuales se distribuyen en la poblacion entera de asegurados lograndoası garantizar la sobrevivencia financiera de todos ellos. Naturalmente, paraque tal mecanismo de asistencia colectiva sea factible, se deben cumplirvarias condiciones, entre ellas, es necesario que el numero de asegurados seasuficientemente grande, que se establezcan con precision las caracterısticasde los siniestros a considerar y que exista buena fe de ambas partes pararespetar los acuerdos pactados. Es claro tambien que el numero de sinies-tros, los momentos en los que estos se presentan, ası como el monto de lasreclamaciones son variables desconocidas dependientes del azar, y que losmodelos de la teorıa de la probabilidad podrıan ser de alguna ayuda en suestudio. En efecto, en las siguientes paginas estudiaremos algunos modelosmatematicos que han ayudado a entender y controlar en alguna medida elaspecto aleatorio de ciertas variables relevantes en los seguros.
1.2. Modelo individual
Suponga que se tiene un portafolio de n polizas individuales de segurosvalidas por un ano como se muestra en la Figura 1.1.
Poliza 1
.......
.......
.......
.......
Poliza 2
.......
.......
.......
.......
Poliza n
.......
.......
.......
.......
Figura 1.1
Sea pj la probabilidad de que el j-esimo asegurado no efectue ninguna recla-macion durante el tiempo de vigencia del seguro, y sea qj la probabilidadde que se observe exactamente una reclamacion. Suponga que la igualdadpj qj 1 se cumple, ello significa que no puede haber mas de una recla-macion por cada asegurado. Tal situacion puede corresponder, por ejemplo,a los seguros de vida. Defina la variable aleatoria
Dj
#
1 si hay reclamacion en la poliza j,
0 si no hay reclamacion en la poliza j.

4 1. El modelo individual y el modelo colectivo
Claramente Dj tiene distribucion Bernoulli con parametro qj . El uso de laletra D viene del termino en ingles Death. Observe que el numero total dereclamaciones esta dado por la variable aleatoria N D1 Dn. Ahorasuponga artificialmente que cada poliza efectua una reclamacion, y sea lavariable aleatoria Cj ¡ 0 el monto de la reclamacion efectuada por la polizaj. Debido a que los siniestros pueden presentarse con caracterısticas distintasy ello puede derivar en distintos montos de reclamacion, consideraremosde manera general a Cj no como una constante sino como una variablealeatoria. La letra C proviene del termino en ingles Claim, que se traduce enespanol como reclamacion. La verdadera reclamacion de la poliza j esta dadapor el producto
DjCj
#
Cj si Dj 1,
0 si Dj 0.
Observe que esta variable aleatoria puede ser mixta, es decir, no ser continuani discreta. Vease la Figura 1.2(b) en donde se muestra una posible graficade la funcion de distribucion de esta variable aleatoria. De esta forma seconsidera como datos en este modelo la coleccion de vectores aleatorios:
pD1, C1q, . . . , pDn, Cnq,
los cuales supondremos independientes. Consideraremos ademas que las va-riables Dj y Cj tambien son independientes entre sı.
Definicion 1.1 El monto de reclamaciones agregadas, o tambien llamadoagregado de reclamaciones, en el modelo individual, es la variable aleatoria
S
n
j1
DjCj . (1.1)
en dondeD1, . . . , Dn, C1, . . . , Cn son variables aleatorias independientes conCj ¡ 0 y Dj con distribucion Berpqjq.
La variable aleatoria S es el monto que afronta una companıa aseguradorapor concepto de reclamaciones durante el periodo completo del seguro. La

1.2. Modelo individual 5
ecuacion (1.1) representa el modelo individual para una poliza de segurosde las caracterısticas senaladas. El modelo tiene este nombre pues suponeconocer las probabilidades de reclamacion y posible monto de reclamacionde todos y cada uno de los asegurados de manera individual. Una posibledesventaja de este modelo es que presupone que el numero de aseguradosen la cartera se mantiene constante durante todo el tiempo de vigencia delseguro. Desde el punto de vista matematico, y tambien desde la perspectivadel negocio del seguro, nuestro objetivo es conocer las caracterısticas de lavariable S, a la cual llamaremos riesgo.
Notacion
Fjpxq Funcion de distribucion de DjCj
Gjpxq Funcion de distribucion de Cj
Usando esta notacion, la funcion de distribucion F pxq del riesgo S adquierela siguiente expresion en terminos de convoluciones: F pxq pF1 Fnqpxq,sin embargo esta expresion es un tanto difıcil de calcular justamente debidoa las convoluciones y no la utilizaremos con frecuencia. Por otro lado, esinmediato comprobar que las funciones Fjpxq y Gjpxq guardan la siguienterelacion.
Proposicion 1.1 Fjpxq
"
1 qj p1Gjpxqq si x ¥ 0,0 si x 0.
Demostracion. Para cualquier numero real x ¥ 0,
Fjpxq P pDjCj ¤ xq
P pDjCj ¤ x |Dj 0qP pDj 0q
P pDjCj ¤ x |Dj 1qP pDj 1q
P p0 ¤ x |Dj 0q pj P pCj ¤ x |Dj 1q qj
pj qj Gjpxq
1 qjp1Gjpxqq.
¥

6 1. El modelo individual y el modelo colectivo
1
bc
b bc
b bc
b bc
b
1 qj
x
Fjpxq
1
bc
b1 qj
x
Fjpxq
(a) (b)
Figura 1.2
En la Figura 1.2 se muestran graficas de la funcion de distribucion Fjpxq endos casos: uno cuando Gjpxq es discreta y otro cuando Gjpxq es continua.Denotaremos tambien por MXptq a la funcion generadora de momentos deuna variable X, cuando exista. Como primeros resultados generales presen-tamos a continuacion algunas caracterısticas de S.
Proposicion 1.2 Bajo la notacion e hipotesis del modelo individual setienen los siguientes resultados.
1. EpSq
n
j1
qjEpCjq.
2. VarpSq n
j1
qj rVarpCjq pjE2pCjq s.
3. MDjCjptq 1 qj p1MCj
ptqq.
4. MSptq
n¹
j1
r 1 qjp1MCjptqq s.

1.2. Modelo individual 7
Demostracion.
1. Por la hipotesis de independencia,
EpSq
n
j1
EpDjCjq
n
j1
EpDjqEpCjq
n
j1
qjEpCjq.
2. Primeramente tenemos que
VarpDjCjq EpD2jC
2j q E2
pDjCjq
qjEpC2j q q2jE
2pCjq
qj rVarpCjq E2pCjqs q2jE
2pCjq
qjVarpCjq qjpjE2pCjq.
Por lo tanto,
VarpSq n
j1
VarpDjCjq
n
j1
qj rVarpCjq pjE2pCjq s.
3. Nuevamente condicionando sobre el valor de Dj ,
MDjCjptq EpetDjCj
q
EpetDjCj|Dj 0qP pDj 0q
EpetDjCj|Dj 1qP pDj 1q
pj qjMCjptq
1 qjp1MCjptqq.
4. Esta igualdad se sigue directamente de la anterior usando la hipotesisde independencia.
¥
Puede considerarse que la variable S tiene una distribucion binomial genera-lizada en el siguiente sentido: se tienen n ensayos independientes Bernoulli,en donde la probabilidad de exito en el ensayo j es qj y el valor asociadoal resultado exito no es 1 como en el esquema usual sino el monto Cj ¡ 0.

8 1. El modelo individual y el modelo colectivo
Puede comprobarse que cuando qj es constante q y los montos Cj son todosiguales a 1, la variable S tiene distribucion binpn, qq, y las formula generalesdemostradas para S se reducen a las de esta distribucion. Al respecto veaseel ejercicio 15.
Es tambien interesante observar que aunque inicialmente el modelo indivi-dual de riesgo que hemos presentado puede aplicarse a esquemas de segurosen donde hay como maximo una reclamacion por poliza, esta unica recla-macion puede considerarse como el monto total conformado por la sumade varias posibles reclamaciones efectuadas por una poliza a lo largo delperiodo de vigencia del seguro. De este modo el modelo individual puedetambien aplicarse al caso de reclamaciones multiples. En cualquier caso, losdatos que deben tenerse o estimarse estadısticamente para aplicar el modeloindividual a una situacion real son el numero de asegurados n, las probabi-lidades de reclamacion q1, q2, . . . , qn, y las distribuciones de probabilidad delos montos C1, C2, . . . , Cn.
Aproximacion normal
Cuando n es grande y el portafolio de asegurados es homogeneo en el sen-tido de que las variables DjCj son identicamente distribuidas con segundomomento finito, puede usarse el teorema central del lımite para aproximarla distribucion de S mediante la distribucion normal, es decir,
P pS ¤ xq P pS EpSqa
VarpSq¤
x EpSqa
VarpSqq
Φpx EpSqa
VarpSqq.
Esta aproximacion puede ser adecuada para ciertos riesgos pero tiene ladesventaja de que asigna una probabilidad positiva al intervalo p8, 0q,lo cual no es consistente con el hecho de que S ¥ 0. Sin embargo, da-do que la distribucion Npµ, σ2
q se concentra principalmente en el intervalopµ 4σ, µ 4σq, cuando la esperanza y la varianza de S son tales queEpSq 4
a
VarpSq ¥ 0, la probabilidad asignada a la parte negativa del ejees realmente pequena, ello alivia un poco el hecho de que esta distribucion

1.3. Formula de De Pril 9
no tenga soporte en el intervalo r0,8q. Tal vez la situacion mas comprome-tedora sea que la funcion de densidad normal decae muy rapidamente puesexisten riesgos cuyas funciones de densidad no cumplen con tal caracterısti-ca. Mas adelante mencionaremos esta propiedad de las distribuciones de losriesgos en terminos de colas pesadas y ligeras.En la siguiente seccion encontraremos una forma recursiva para calcularla funcion de probabilidad de S cuando el monto de las reclamaciones semodela mediante una variable aleatoria discreta.
1.3. Formula de De Pril
Presentamos a continuacion la formula de De Pril. Este resultado fue de-mostrado por Nelson De Pril [12] en 1986 y proporciona una expresionexacta, aunque recursiva, de la distribucion de probabilidad de un riesgo enel modelo individual. La formula es bastante general aunque presupone quelas reclamaciones toman los valores en el conjunto t1, 2, . . .u. Este supuestono es realmente una restriccion fuerte, pues en la practica el pago de si-niestros se realiza siempre usando alguna unidad monetaria. Por otro lado,la formula que encontraremos permite que los riesgos a asegurar no seanhomogeneos, sin embargo, estaran determinados a priori, es decir, seran de-terministas y fijos. Para establecer la formula de De Pril es necesario dividirel portafolio de n asegurados de acuerdo con la tasa de mortalidad y lasuma asegurada. Denotaremos por nij al numero de asegurados que tienenprobabilidad de reclamacion qj y monto de reclamacion i, en donde i tomavalores en t1, 2, . . . , Iu y j en t1, 2, . . . , Ju. De esta forma se tiene la tablade la Figura 1.3 en donde la suma de las entradas es n, es decir,
n
I
i1
J
j1
nij .
Denotaremos por Yij el monto real reclamado por un asegurado cuya pro-babilidad de reclamacion es qj y posible monto reclamado i, es decir,
Yij
"
i con probabilidad qj ,
0 con probabilidad 1 qj .
En los siguientes calculos haremos uso de la funcion generadora de probabi-lidad. El lector encontrara en el Apendice (pagina 249) un recordatorio de

10 1. El modelo individual y el modelo colectivo
q1 q2 qj qJ
1 n11 n12 n1J
2 n21 n22 n2J
i nij niJ
I nI1 nI2 nIj nIJ
Probabilidades de reclamacion
Montode la
reclamacion
Figura 1.3
esta funcion y de algunas de sus propiedades.
Teorema 1.1 (Formula de De Pril [i]) Sea nij el numero de polizascuyos asegurados tienen tasa de mortalidad qj y suma asegurada i. Supongaque j 1, 2, . . . , J , e i 1, 2, . . . , I. Entonces para el riesgo S que sigue elmodelo individual, las probabilidades gx P pS xq estan dadas por
gx
1
x
x^I
i1
txiu¸
k1
gxik hpi, kq, para x ¥ 1,
g0
I¹
i1
J¹
j1
p1 qjqnij ,
en donde
hpi, kq ip1qk1
J
j1
nij pqj
1 qjq
k.
Demostracion. La funcion generadora de probabilidad del monto recla-mado Yij por un asegurado con probabilidad de reclamacion qj y monto

1.3. Formula de De Pril 11
reclamado i, esEptYij
q p1 qjq qjti.
Por lo tanto, usando la hipotesis de independencia, la funcion generadorade probabilidad de la cartera completa es
Gptq EptSq
8
¸
r0
trgr
I¹
i1
J¹
j1
p1 qj qjtiq
nij ,
en donde gr P pS rq. Tomando logaritmo y despues derivando,
lnGptq I
i1
J
j1
nij lnp1 qj qjtiq.
d
dtlnGptq
G1
ptq
Gptq
I
i1
J
j1
nijiqjt
i1
1 qj qjti.
Por lo tanto,
tG1
ptq Gptq
I
i1
J
j1
nijiqjt
i
1 qj qjti
Gptq
I
i1
J
j1
nij iqjt
i
1 qjp1
qjti
1 qjq
1
Gptq
I
i1
J
j1
nij iqjt
i
1 qj
8
¸
k1
p1qk1p
qjti
1 qjq
k1,
en donde hemos usado la expansion p1xq1
°
8
k0xk, valida para |x| 1.
Por lo tanto, para valores suficientemente pequenos de t,
tG1
ptq Gptq
I
i1
J
j1
nij i
8
¸
k1
p1qk1p
qj
1 qjq
ktik. (1.2)
Defina ahora la funcion
hpi, kq ip1qk1
J
j1
nij pqj
1 qjq
k.

12 1. El modelo individual y el modelo colectivo
La doble suma respecto de los ındices j y k que aparece en la expre-sion (1.2) es absolutamente convergente en cualquiera de los dos ordenesque se efectuen estas sumas y el resultado es el mismo. Por lo tanto, es vali-do el intercambio en el orden de estas sumas y la expresion anterior puedeescribirse como sigue:
tG1
ptq Gptq
I
i1
8
¸
k1
tik hpi, kq.
Sustituyendo las expresiones para G1
ptq y Gptq en sus correspondientes seriesde potencias se obtiene
8
¸
r1
rtrgr
8
¸
r0
trgr
I
i1
8
¸
k1
tik hpi, kq.
Para x ¥ 1, el coeficiente de tx en el lado izquierdo es xgx, mientras que en ellado derecho es la suma de los terminos gxikhpi, kq, para aquellos valores dei y k tales que 1 ¤ ik ¤ x. Se pueden primero establecer los posibles valorespara i de la siguiente forma: i 1, . . . , x^ I y por lo tanto los valores parak son k 1, . . . , t xiu , en donde x^ I es el valor mınimo entre x e I, y t xiu
es la parte entera del cociente xi. Igualando estos coeficientes se tiene que
xgx
x^I
i1
txiu¸
k1
gxik hpi, kq,
De esta forma se llega a la siguiente expresion, para x ¥ 1,
gx 1
x
x^I
i1
txiu¸
k1
gxik hpi, kq.
Por otro lado, como S 0 solo cuando ningun asegurado efectua ningunareclamacion, para x 0 se tiene que
g0
I¹
i1
J¹
j1
p1 qjqnij ,
¥

1.3. Formula de De Pril 13
Para un mejor entendimiento de la formula recursiva de De Pril [i] escribire-mos a continuacion de manera explıcita los primeros terminos de este de-sarrollo.
g0
I¹
i1
J¹
j1
p1 qjqnij
g1 g0 hp1, 1q
g2
1
2p g0 rhp1, 2q hp2, 1qs g1hp1, 1q q
g3
1
3p g0 rhp1, 3q hp3, 1qs g1 rhp1, 2q hp2, 1qs g2hp1, 1q q
...
Ejemplo 1.1 Para los datos que se muestran en la tabla de la Figura 1.4en donde se tienen 48 polizas de seguros con las probabilidades de recla-macion y los montos de reclamaciones indicados, la correspondiente funcionde densidad para este riesgo es la que se muestra en la Figura 1.5. En elapendice se encuentra el codigo en R de una implementacion de la formulade De Pril [i]. Debe tenerse cuidado en la implementacion numerica deesta formula, pues dado su caracter recursivo y que algunas de las probabi-lidades involucradas pueden ser muy pequenas, pueden generarse resultadosincorrectos debido al inevitable redondeo de cifras en una computadora.
i z q 0.03 0.04 0.05
1 1 3 12 3 5 43 5 3 44 2 2 65 2 3 4
Probabilidades de reclamacion
Montode la
reclamacion
Figura 1.4
La formula que hemos denominado de De Pril [i] y que se encuentra ex-presada en el contexto de un portafolio de asegurados individuales, puede

14 1. El modelo individual y el modelo colectivo
x
gx
0.1
2 4 6 8 10 12 14 16 18 20
Figura 1.5
escribirse como un resultado teorico de la teorıa de la probabilidad. Esteresultado es el contenido de la siguiente proposicion. La formula tiene unaexpresion mas simple y la demostracion sigue los mismos lineamientos quela que hemos presentado, sin embargo, escribiremos nuevamente los detallesde la prueba en esta version simplificada.
Proposicion 1.3 (Formula de De Pril [ii]) Sean X1, X2, . . . , Xn
v.a.i.i.d. con valores en el conjunto t0, 1, 2, . . .u. Para cada entero j ¥ 0,defina la probabilidad fj P pX jq, y suponga f0 0. Sea S
X1 Xn. Entonces las probabilidades gx P pS xq se puedencalcular recursivamente mediante la siguiente formula:
g0 pf0qn,
gx
1
f0
x
j1
j pn 1q
x 1
fj gxj , para x ¥ 1.

1.3. Formula de De Pril 15
Demostracion. Primeramente observemos que el evento pS 0q ocurre siy solo si todos los sumandos de S son cero, de modo que por independencia,
g0 pf0qn.
Ahora veamos la forma de obtener la formula recursiva. Sean PXptq y PSptq
las funciones generadoras de probabilidad de las variables discretas X y S
respectivamente, es decir,
PXptq EptXq
8
¸
k0
tk fk,
PSptq EptSq
8
¸
k0
tk gk.
Por independencia e identica distribucion, PSptq rPXptqsn. Derivando
respecto de t,
P1
Sptq nrPXptqsn1 P
1
Xptq.
Multiplicando ambos lados por t PXptq,
PXptq t P1
Sptq nPSptq t P1
Xptq,
que en terminos de sumas se escribe como sigue
8
¸
j0
tj fj
8
¸
k1
k tk gk n
8
¸
k0
tk gk
8
¸
j1
j tj fj .
El siguiente paso es identificar el coeficiente del termino tx para x ¥ 1 encada lado de la ecuacion. Por ejemplo, para el lado izquierdo el coeficientees el termino fj k gk para todos aquellos valores de j ¥ 0 y k ¥ 1 tales quej k x. Esta doble suma puede escribirse como
°x1
j0fj px jq gxj . De
manera similar se encuentra el coeficiente del lado derecho. Igualando estoscoeficientes se llega a la identidad
x1
j0
px jq fj gxj n
x
j1
j fj gxj .

16 1. El modelo individual y el modelo colectivo
Separando el primer sumando del lado izquierdo y anadiendo en esa mismasuma el termino correspondiente a j x, que es cero, se obtiene
xf0gx
x
j1
px jq fj gxj n
x
j1
j fj gxj .
Finalmente se despeja el termino gx para llegar a la formula anunciada,
gx 1
f0
x
j1
r
jpn 1q
x 1s fj gxj , x ¥ 1.
¥
Los primeros terminos de la formula de De Pril [ii] se muestran a continua-cion.
g0 pf0qn,
g1
1
f0pn f1 g0q
n
1
f1 pf0qn1,
g2
1
f0p
n 1
2f1 g1 n f2 g0q
n
2
pf1q2pf0q
n2
n
1
f2 pf0qn1,
g3
1
f0p
n 2
3f1 g2
2n 1
3f2 g1 n f3 g0q
n
3
pf1q3pf0q
n3 2!
n
2
f2 f1 pf0qn2
n
1
f3 pf0qn1.
Observe que las expresiones simplificadas tienen una interpretacion naturalen terminos combinatoriales. Por ejemplo, la expresion para g2 involucra dossituaciones: la primera cuando dos sumandos distintos de S toman cada unoel valor 1 y el resto toma el valor 0, y la segunda situacion cuando uno delos sumandos toma el valor 2 y el resto es 0. Los coeficientes binomiales dancuenta de las distintas formas en las que se pueden presentar estos arreglos.
Ejemplo 1.2 Sean X1, X2, X3 variables aleatorias independientes con identi-ca distribucion dada por la tabla que aparece abajo y cuya grafica se muestraen la Figura 1.6(a). Usando la formula de De Pril [ii] encontraremos la dis-tribucion de S X1 X2 X3.

1.3. Formula de De Pril 17
j 0 1 2
fj 0.5 0.2 0.3
j
fj
0 1 2
12
(a)
x
gx
0 1 2 3 4 5 6
12
(b)
Figura 1.6
Observe que la variable suma puede tomar cualquiera de los valores 0, 1, . . . , 6.Usando la misma notacion que en la formula de De Pril se muestran a con-tinuacion los calculos para encontrar la funcion de probabilidad de S y lagrafica correspondiente aparece en la Figura 1.6(b).
g0 pf0q3 0.125,
g1
1
f0p3f1g0q 0.15,
g2
1
f0pf1g1 3f2g0q 0.285,
g3
1
f0p
1
3f1g2
8
3f2g1q 0.188,
g4
1
f0pf2g2q 0.171,
g5
1
f0p
1
5f1g4
3
5f2g3q 0.054,
g6
1
f0p
1
3f1g5
1
3f2g4q 0.027 .
En la seccion de ejercicios el lector puede encontrar algunas aplicaciones dela formula de DePril [ii] para obtener la funcion de probabilidad de variables
18 1. El modelo individual y el modelo colectivo
aleatorias que pueden construirse como sumas de variables discretas condistribucion conocida, por ejemplo, las distribuciones binomial y Poisson.
1.4. Modelo colectivo
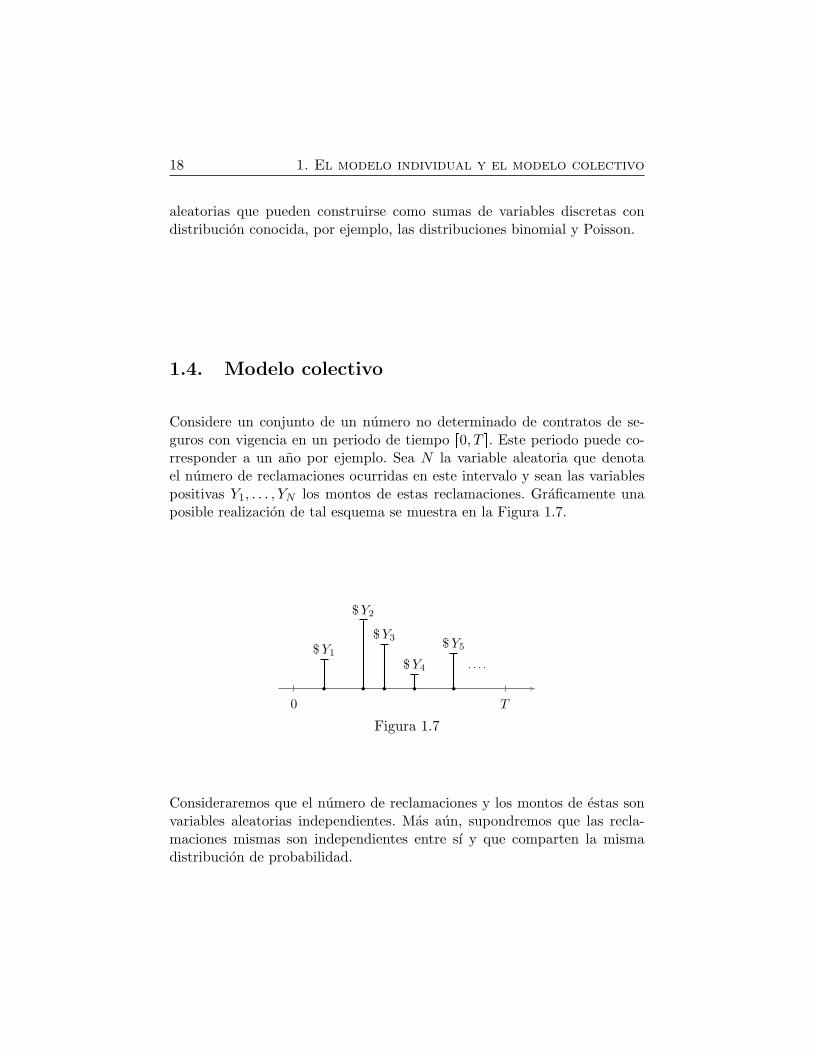
Considere un conjunto de un numero no determinado de contratos de se-guros con vigencia en un periodo de tiempo r0, T s. Este periodo puede co-rresponder a un ano por ejemplo. Sea N la variable aleatoria que denotael numero de reclamaciones ocurridas en este intervalo y sean las variablespositivas Y1, . . . , YN los montos de estas reclamaciones. Graficamente unaposible realizacion de tal esquema se muestra en la Figura 1.7.
0 T
b
$Y1
b
$Y2
b
$Y3
b
$Y4
b
$Y5
Figura 1.7
Consideraremos que el numero de reclamaciones y los montos de estas sonvariables aleatorias independientes. Mas aun, supondremos que las recla-maciones mismas son independientes entre sı y que comparten la mismadistribucion de probabilidad.

1.4. Modelo colectivo 19
Definicion 1.2 El monto agregado o monto acumulado de todas las recla-maciones efectuadas es la variable aleatoria S, llamada riesgo, y definidacomo sigue
S
N
j1
Yj , (1.3)
en donde Y1, Y2, . . . es una coleccion de variables aleatorias independientespositivas identicamente distribuidas e independientes de la variable aleato-ria N con valores en el conjunto t0, 1, 2, . . .u. Cuando N 0 se define S
como cero.
Observe que cada sumando es una variable aleatoria y que el numero desumandos es tambien aleatorio. Observe ademas que S puede ser una va-riable aleatoria mixta, es decir, no ser discreta ni continua, pues cuando losmontos de las reclamaciones Y son variables continuas estrictamente posi-tivas, la variable S puede tomar el valor 0 con probabilidad P pS 0q P pN 0q ¡ 0, y puede ademas tomar cualquier valor en el intervalo p0,8q.La ecuacion (1.3) representa el modelo colectivo para un contrato de se-guros, cuyas posibles realizaciones como funcion del tiempo tienen la formade la grafica de la Figura 1.8.
b bc
b bc
b bc
b
Sptq
t$Y1
$Y2
$Y3
Figura 1.8
A la funcion de distribucion de cada reclamacion Y la denotaremos por laletra G. Se asume naturalmente que Gp0q 0, ello equivale a decir que lavariable Y es positiva. Adicionalmente usaremos la abreviacion:

20 1. El modelo individual y el modelo colectivo
Notacion µn : EpY nq
En particular se escribe µ en lugar de µ1 EpY q. Nuevamente el problemacentral es encontrar la distribucion de probabilidad de S, la cual dependede la distribucion de Y y de N . Un primer resultado general al respectoes el que aparece a continuacion. Antes de enunciarlo recordemos que la0-convolucion de una funcion de distribucion G se define como
G0pxq
"
1 si x ¥ 0,0 si x 0.
Proposicion 1.4 La funcion de distribucion del riesgo S en el modelocolectivo es
F pxq
8
¸
n0
GnpxqP pN nq.
Demostracion.
F pxq
8
¸
n0
P pS ¤ x |N nqP pN nq
P pS ¤ x |N 0qP pN 0q 8
¸
n1
P pY1 Yn ¤ xqP pN nq
G0pxqP pN 0q
8
¸
n1
GnpxqP pN nq
8
¸
n0
GnpxqP pN nq.
¥
Algunas caracterısticas numericas de la variable S se muestran a continua-cion.

1.4. Modelo colectivo 21
Proposicion 1.5 Suponiendo que las cantidades y funciones indicadasexisten, el riesgo S en el modelo colectivo cumple las siguientes propiedades.
1. EpSq EpNqEpY q.
2. EpS2q EpNqEpY 2
q EpNpN 1qqE2pY q.
3. VarpSq VarpNqE2pY q VarpY qEpNq.
4. MSptq MN p ln pMY ptqq q.
Demostracion.
1. Condicionaremos sobre el valor de N y despues usaremos la hipotesis deindependencia. El resultado del calculo es el mismo cuando la variable N
inicia en el valor 0 o en el valor 1.
EpSq
8
¸
n0
Ep
N
j1
Yj |N nqP pN nq
8
¸
n0
Ep
n
j1
Yj |N nqP pN nq
8
¸
n0
nEpY qP pN nq
EpNqEpY q.

22 1. El modelo individual y el modelo colectivo
2. Nuevamente condicionando sobre el valor de N ,
EpS2q
8
¸
n0
Epp
N
j1
Yjq2|N nqP pN nq
8
¸
n0
Epp
n
j1
Yjq2|N nqP pN nq
8
¸
n0
Epp
n
j1
Yjq2qP pN nq
8
¸
n0
n
j1
EpY 2j q
n
j,k1
jk
EpYjYkq
P pN nq.
Observe que segunda suma es nula cuando n 0 y a su vez la tercera sumase anula cuando n 0 o 1. Ası, por la identica distribucion tenemos que
EpS2q
8
¸
n0
nEpY 2qP pN nq
8
¸
n0
npn 1qE2pY qP pN nq
EpNqEpY 2q EpNpN 1qqE2
pY q.
3. Por las formulas anteriores,
VarpSq EpS2q E2
pSq
EpNqEpY 2q EpNpN 1qqE2
pY q E2pNqE2
pY q
EpNq rEpY 2q E2
pY q s rEpN2q E2
pNq sE2pY q
EpNqVarpY q Var pNqE2pY q.

1.4. Modelo colectivo 23
4. De manera analoga a los dos primeros incisos,
MSptq
8
¸
n0
EperpY1YN q|N nqP pN nq
8
¸
n0
EperpY1YnqqP pN nq
8
¸
n0
pMY ptqqn P pN nq
EppMY ptqqNq
EpeN lnpMY ptqqq
MN plnpMY ptqqq.
¥
Vease la seccion de ejercicios para los terceros momentos de S. Considera-remos a continuacion algunos casos particulares del modelo colectivo.
Modelo binomial compuesto
Cuando el numero de reclamaciones N tiene una distribucion binpn, pq sedice que el riesgo S tiene una distribucion binomial compuesta, y se escribeS bin comppn, p,Gq, en donde G es la funcion de distribucion de cadasumando en la definicion de S. Bajo esta hipotesis se tienen los siguientesresultados.
Proposicion 1.6 Si N tiene distribucion binpn, pq, entonces
a) EpSq npµ.
b) EpS2q nppµ2 pn 1qpµ2
q.
c) VarpSq nppµ2 pµ2q.
d) MSptq p1 p pMY ptqqn.

24 1. El modelo individual y el modelo colectivo
Estas expresiones se siguen facilmente de las formulas generales demostradasantes, basta recordar que si N tiene distribucion binpn, pq, entonces EpNq np, VarpNq npp1 pq, y MN ptq p1 p petqn. Vease la seccion deejercicios para los terceros momentos de este modelo. Observe que en estecaso se tiene una cota superior para el numero de reclamaciones que puedenefectuarse.
Modelo binomial negativo compuesto
Cuando el numero de reclamaciones N tiene una distribucion binomial ne-gativa se dice que el riesgo S tiene una distribucion binomial negativa com-puesta. Esto es, si N bin negpk, pq, entonces S bin neg comppk, p,Gq,donde nuevamente G hace referencia a la funcion de distribucion de cadasumando de S. En este caso se cumple lo siguiente.
Proposicion 1.7 Si N tiene distribucion bin negpk, pq, entonces
a) EpSq kp1p 1qµ.
b) EpS2q kp1p 1qrµ2 pk 1qp1p 1qµ2
s.
c) VarpSq kp1p 1qrµ2 p1p 1qµ2s.
d) MSptq
p
1 p1 pqMY ptq
k
.
Para encontrar estas formulas es suficiente recordar que si N tiene distribu-cion bin negpk, pq, entonces EpNq kp1 pqp, VarpNq kp1 pqp2, yMN ptq rpp1p1pqetqsk. En la seccion de ejercicios se presenta el tercermomento de este modelo. En el caso particular cuando k 1, la distribucionde N se reduce a la distribucion geometrica de parametro p y se dice que S
tiene distribucion geometrica compuesta.

1.5. Modelo colectivo Poisson 25
Modelo Poisson compuesto
Cuando el numero de reclamaciones N tiene una distribucion Poisson sedice que el riesgo S tiene una distribucion Poisson compuesta, y se escribeS Poisson comppλ,Gq, en donde λ es el parametro de la distribucionPoisson y G es la funcion de distribucion de cada sumando de S. Para estemodelo se tienen los siguientes resultados.
Proposicion 1.8 Si N tiene distribucion Poissonpλq, entonces
a) EpSq λµ.
b) EpS2q λµ2 λ2µ2.
c) VarpSq λµ2.
d) MSptq exp rλpMY ptq 1q s.
Nuevamente estas expresiones son consecuencia de las formulas generalesdemostradas antes, y del hecho de que si N tiene distribucion Poissonpλq,entonces EpNq λ, VarpNq λ, yMN ptq exppλpet1qq. Vease la seccionde ejercicios para los terceros momentos de este modelo. Observe que elparametro λ y la distribucion de la variable Y determinan por completo almodelo Poisson compuesto. Estudiaremos con mas detalle este modelo enla siguiente seccion.
1.5. Modelo colectivo Poisson
En esta seccion retomamos el caso cuando el numero de reclamaciones enel modelo colectivo sigue una distribucion Poisson. Primeramente explicare-mos la forma en la que se puede obtener un modelo colectivo Poisson apartir del modelo individual. Despues mostraremos como este modelo Poi-sson compuesto aproxima al modelo individual. Finalmente estudiaremosalgunas propiedades interesantes y utiles del modelo colectivo Poisson.

26 1. El modelo individual y el modelo colectivo
Modelo Poisson compuesto asociado al modelo individual
Considere el modelo individual de riesgo Si
°nj1
DjCj , junto con lanotacion e hipotesis correspondientes. El superındice i indica que se tratade un modelo individual. A partir de este modelo se construye a conti-nuacion un modelo colectivo con distribucion Poisson compuesta. Para ellorecuerde que unicamente se necesita establecer el valor del parametro λ dela distribucion Poisson y la funcion de distribucion Gpxq del monto de lasreclamaciones. Sean entonces
λ
n
j1
qj , (1.4)
y Gpxq
n
j1
qj
λGjpxq, (1.5)
en donde Gjpxq es la funcion de distribucion de la variable Cj . Haremosalgunas observaciones sobre estas definiciones.
a) Mediante la primera igualdad se establece que el numero esperado dereclamaciones en ambos modelos es el mismo.
b) En la segunda ecuacion se define a la funcion de distribucion deuna reclamacion en el modelo colectivo como el promedio pondera-do de las funciones de distribucion del monto de todas las reclama-ciones en el modelo individual, siendo las ponderaciones los factoresq1λ, . . . , qnλ. Como estos numeros conforman una distribucion deprobabilidad, el promedio resulta ser una funcion de distribucion. Ob-servamos que al agregar los distintos tipos de riesgo Cj del modeloindividual para formar el modelo colectivo con reclamaciones Yj inde-pendientes e identicamente distribuidas, se pierde el comportamientoindividual de los riesgos. Ası, en la proporcion en la que el j-esimoriesgo individual se agrega, esto es qjλ, ası es su contribucion en lafuncion de distribucion de las reclamaciones en el modelo colectivo.
De esta forma se construye el modelo colectivo Sc
°Nj1
Yj , al cual lla-maremos modelo colectivo Poisson compuesto asociado al modelo individual,en donde el superındice c indica que se trata de un modelo colectivo. Paraeste modelo particular se cumplen las siguientes igualdades:

1.5. Modelo colectivo Poisson 27
a) EpScq
n
j1
qj EpCjq.
b) VarpScq
n
j1
qj EpC2j q .
c) EpY kq
n
j1
qj
λEpCk
j q.
d) MY ptq
n
j1
qj
λMCj
ptq.
Estas expresiones se siguen directamente de resultados previos acerca delmodelo Poisson compuesto y de las igualdades (1.4) y (1.5). Por ejemplo,usando integrales de Riemann-Stieltjes (vease el Apendice que aparece alfinal del texto), el k-esimo momento de una reclamacion del modelo Sc es,
EpY kq
»
8
0
ykdGpyq
n
j1
qj
λ
»
8
0
ykdGjpyq
n
j1
qj
λEpCk
j q.
De manera analoga se verifican las otras identidades. A modo de compara-cion se tiene que EpSi
q EpScq, mientras que VarpSi
q ¤ VarpScq.
El modelo Poisson compuesto asociado como lımitedel modelo individual: primera argumentacion
Sea Si el riesgo en un modelo individual y sea Sc el riesgo del modelo colec-tivo Poisson compuesto asociado. Demostraremos que este modelo colectivopuede ser obtenido como un proceso lımite en el modelo individual. Con-sideremos entonces el modelo individual junto con la notacion e hipotesisusuales. Por resultados previos sabemos que
MSiptq
n¹
j1
r1 qjpMCjptq 1qs.
Sea k un entero positivo cualquiera. De manera artificial y teorica se constru-ye ahora un nuevo portafolio de asegurados con las siguientes caracterısticas:

28 1. El modelo individual y el modelo colectivo
cada poliza j de las n originales se reemplaza por k subpolizas identicas, encada una de las cuales la probabilidad de reclamacion se define como qjk, yla funcion de distribucion del monto de una reclamacion es la misma Gjpyq.Vease la Figura 1.9. En consecuencia, el portafolio consiste ahora de kn
subpolizas en donde la probabilidad de reclamacion en cada una de ellas esmenor. No es de sorprenderse entonces que al hacer k tender a infinito seobtenga un modelo Poisson.
Poliza
.......
.......
.......
.......
Subpoliza 1
..........
Subpoliza k
..........
Figura 1.9
De este modo, si Sik denota el riesgo asociado al portafolio modificado,
entonces se tiene que
MSikptq
n¹
j1
r1qj
kpMCj
ptq 1qsk.
Se hace ahora tender k a infinito y usando el resultado lımkÑ8
p1 xkqk ex
se obtiene
lımkÑ8
MSikptq
n¹
j1
exp r qjpMCjptq 1q s
exp rn
j1
qjMCjptq λ s
exp rλpMY ptq 1q s
MScptq.
Puesto que la convergencia de funciones generadoras de momentos es equi-valente a la convergencia en distribucion de las correspondientes variables

1.5. Modelo colectivo Poisson 29
aleatorias, se obtiene entonces que el modelo colectivo Poisson compuestoasociado es el lımite en distribucion del modelo individual cuando el numerode polizas crece y las probabilidades de reclamacion son cada vez maspequenas. Ası, el argumento presentado en esta seccion justifica el uso delmodelo Poisson compuesto en el caso cuando el portafolio es grande y lasprobabilidades de reclamacion son pequenas. Para reforzar esta idea, el ar-gumento informal que presentamos en el siguiente parrafo tambien favoreceal modelo Poisson compuesto bajo las condiciones lımites mencionadas.
El modelo Poisson compuesto asociado como lımitedel modelo individual: segunda argumentacion
Recordemos nuevamente que la funcion generadora de momentos del riesgoSi es
MSiptq
n¹
j1
r1 qjpMCjptq 1qs.
Observemos que el termino qjpMCjptq1q es pequeno para valores pequenos
de t. Usando la formula lnp1 xq x x22 x33 , se puede escribirla aproximacion lnp1 xq x. De modo que
lnpMSiptqq
n
j1
lnr1 qjpMCjptq 1qs
n
j1
qjpMCjptq 1q
λ r
n
j1
qj
λMCj
ptq 1 s,
en donde λ q1 qn. Por lo tanto,
MSiptq exp pλ rn
j1
qj
λMCj
ptq 1 s q.
Esta formula corresponde a la funcion generadora de momentos del riesgocon distribucion Poisson compuesta, en donde los montos de las reclama-ciones tienen funcion generadora de momentos
°nj1
qjλMCj
ptq.

30 1. El modelo individual y el modelo colectivo
Modelo Poisson compuesto con varios tipos de riesgos
Demostraremos ahora que la suma de riesgos independientes que siguenel modelo Poisson compuesto tambien es Poisson compuesto. Esta es unapropiedad bastante util y generaliza el resultado de probabilidad que es-tablece que la suma de dos variables aleatorias independientes con distribu-cion Poisson tiene nuevamente distribucion Poisson.
Proposicion 1.9 Sean S1 y S2 dos riesgos independientes con distribucionPoisson compuesta con parametros λ1 y λ2, y reclamaciones Y p1q y Y p2q
con funcion de distribucion G1pxq y G2pxq respectivamente. Entonces elriesgo S S1 S2 tambien sigue una distribucion Poisson compuesta conparametro λ λ1 λ2, y las reclamaciones tienen funcion de distribucion
Gpxq λ1
λG1pxq
λ2
λG2pxq.
Demostracion. Por independencia tenemos que
MS1S2ptq MS1
ptqMS2ptq
exprλ1pMY p1qptq 1qs exprλ2pMY p2qptq 1qs
exprλpλ1
λMY p1qptq
λ2
λMY 2ptq 1qs,
en donde λ1
λMY p1qptq
λ2
λMY p2qptq es la funcion generadora de momentos de
la funcion de distribucion Gpxq λ1
λG1pxq
λ2
λG2pxq. ¥
El resultado anterior puede extenderse facilmente al caso S S1 Sn.Vease el enunciado del ejercicio 40 en la pagina 41.
Modelo Poisson compuesto con reclamaciones clasificadas
Sea S un riesgo con distribucion Poisson compuesta de parametro λ. Supon-ga que los montos de las reclamaciones pueden ser clasificadas en m cate-gorıas excluyentes y exhaustivas denotadas por A1, . . . , Am. Tıpicamenteestas categorıas pueden ser intervalos de valores para las reclamaciones. Sea

1.5. Modelo colectivo Poisson 31
pk P pY P Akq ¡ 0 tal que p1 pm 1. Sea Nk el numero dereclamaciones del tipo k. Entonces N N1 Nm y debido a la inde-pendencia de los montos en las reclamaciones, el vector pN1, . . . , Nmq tieneuna distribucion condicional multinomialpp1, . . . , pm;nq cuando N n, esdecir, para enteros no negativos n1, . . . , nm tales que n1 nm n, ladistribucion multinomial establece que
P pN1 n1, . . . , Nm nm |N nq
n
n1 nm
pn1
1 pnm
m
n!
n1! nm!pn1
1 pnm
m .
La distribucion no condicional del vector pN1, . . . , Nmq es el contenido delsiguiente resultado.
Proposicion 1.10 Las variables aleatorias N1, . . . , Nm son independientesy cada variable Nk tiene distribucion Poissonpλpkq.
Demostracion. Sean n1, . . . , nm enteros no negativos cualesquiera y sean la suma de todos estos numeros, es decir, n1 nm n. Entonces
P pN1 n1, . . . , Nm nmq P pN1 n1, . . . , Nm nm, N nq
P pN1 n1, . . . , Nm nm |N nqP pN nq
n!
n1! nm!pn1
1 pnm
m
λn
n!eλ
n¹
k1
pλpkqnk
nk!eλpk .
Se desprende de esta igualdad que la variable Nk tiene distribucion marginalPoissonpλpkq. De esta identidad se verifica tambien la independencia. ¥
Observe que, condicionadas al evento pN nq, las variables N1, . . . , Nm noson independientes, mientras que sin tal condicion, lo son. Por otro lado,como los montos de las reclamaciones son independientes de N , el riesgo de

32 1. El modelo individual y el modelo colectivo
tipo k esta dado por la variable
Sk
Nk
j1
Ypkqj ,
en donde Ypkqj es una variable aleatoria con funcion de distribucion
Gkpxq P pYj ¤ x |Yj P Akq P pYj ¤ x, Yj P Akq
P pYj P Akq.
Por lo anterior, el riesgo Sk tiene distribucion Poisson compuesta con para-metros λpk y Gkpxq. En particular, cuando Ak pxk1, xks, con 0 ¤ x0
x1 xm, la funcion de distribucion Gkpxq tiene la siguiente forma:
Gkpxq
$
'
'
&
'
'
%
0 si x xk,Gpxq Gpxk1q
Gpxkq Gpxk1q
si xk1 ¤ x xk,
1 si x ¥ xk.
Modelo Poisson compuesto mixto
Cuando el numero de reclamaciones N tiene una distribucion Poissonpλq yel parametro λ es a su vez una variable aleatoria, se dice que el riesgo S
tiene una distribucion Poisson compuesta mixta. Algunas caracterısticas deeste modelo se muestran a continuacion.
Proposicion 1.11 Si N tiene distribucion PoissonpΛq en donde Λ es unavariable aleatoria con funcion de distribucion FΛpλq, entonces
a) P pN nq
»
8
0
eλλn
n!dFΛpλq.
b) EpSq EpΛqµ.
c) EpS2q EpΛqµ2 EpΛ2
qµ2.
d) VarpSq VarpΛqµ2 EpΛqµ2.
e) MSptq MΛpMY ptq 1q.
1.6. Ejercicios 33
Para obtener las identidades que aparecen en esta proposicion es suficientecondicionar sobre el valor de Λ. Vease la seccion de ejercicios para los ter-ceros momentos de este modelo.
Comentarios y referencias
Hemos presentado dos modelos de riesgo con caracterısticas distintas: elmodelo individual y el modelo colectivo. En ambos casos se trata de unavariable aleatoria a la cual le hemos llamado riesgo y que engloba el total dereclamaciones de un conjunto de asegurados durante un intervalo de tiempoarbitrario pero fijo. Con el objetivo de cuantificar y tener control de estosriesgos, el problema central ha sido encontrar las caracterısticas numericasde estas variables aleatorias y mejor aun, la distribucion de probabilidad deellas. Ası, hemos encontrado varias expresiones para algunas caracterısticasnumericas de estos dos modelos de riesgo. Hemos tambien encontrado que,bajo ciertas condiciones, las formulas de De Pril pueden aplicarse para calcu-lar la distribucion de probabilidad exacta de un riesgo que sigue un modeloindividual. Para completar estos primeros resultados, en el siguiente capıtu-lo veremos la formula de Panjer que nos permitira aplicar un mecanismorecursivo para calcular la distribucion de probabilidad exacta de un riesgoque sigue el modelo colectivo. El lector puede encontrar otras exposicionessobre el modelo individual y colectivo en las siguientes referencias: Bowers etal. [7], Gerber [15], Klugman et al. [23].
1.6. Ejercicios
Modelo individual
1. Considere el modelo individual para un portafolio de n polizas de se-guros. Bajo la notacion e hipotesis usuales, demuestre que el numeroesperado de reclamaciones es q1 qn.
2. Para un modelo individual de riesgo, encuentre la distribucion deprobabilidad del numero total de reclamaciones en una cartera de nasegurados cuandoDj tiene distribucion Berpqq, es decir, qj q ¡ 0es constante.

34 1. El modelo individual y el modelo colectivo
3. Considere el modelo individual de riesgo en dondeDj tiene distribu-cion Berpqq, es decir, qj q ¡ 0 es constante. Suponga ademas quecada reclamacion Cj es constante c ¡ 0, es decir, se trata de unamisma suma asegurada para todos. Encuentre una expresion parala esperanza y la varianza de S.
4. Considere el modelo individual para un portafolio de n polizas deseguros de vida. Suponga que el j-esimo asegurado tiene una sumaasegurada constante cj . Demuestre que:
a) EpSq
n
j1
qjcj .
b) VarpSq n
j1
qjpjc2j .
5. Demuestre que si f1pxq, . . . , fnpxq son funciones diferenciables queno se anulan, entonces
d
dx
n¹
j1
fjpxq
n¹
j1
fjpxq
n
j1
f1
jpxq
fjpxq
.
Use esta formula y la expresion encontrada para MSptq en el modeloindividual de riesgo para encontrar nuevamente EpSq y VarpSq.
6. Para un riesgo S que sigue el modelo individual demuestre que:
a) EpS2q
n
j1
qjEpC2j q
¸
ij
qiqjEpCiqEpCjq.
b) EpS3q
n
j1
qjEpC3j q 3
¸
ij
qiqjEpCiqEpC2j q
¸
i,j,kdistintos
qiqjqkEpCiqEpCjqEpCkq.
7. Suponga queD y C son dos variables aleatorias independientes talesque D tiene distribucion Berpqq y C se distribuye exppλq. Calculey grafique la funcion de distribucion de la variable aleatoria mixtaDC.

1.6. Ejercicios 35
8. Para el modelo individual, suponga queDj tiene distribucion Berpqq,es decir, qj q ¡ 0 es constante. Encuentre la distribucion delriesgo S cuando n 3 y Cj tiene la siguiente distribucion de pro-babilidad:
P pCj 1q 0.6,
P pCj 2q 0.3,
P pCj 3q 0.1.
9. Considere un portafolio de 21 polizas individuales de seguros devida validas por un ano como se indica en la tabla que apareceabajo. Usando el modelo individual calcule EpSq y VarpSq.
Tasa de Suma aseguradamortalidad qj $2 $3 $4 $5
0.04 1 1 2 10.05 0 2 3 30.06 1 1 2 4
10. Sean qj,0, qj,1 y qj,2 las probabilidades de que el j-esimo aseguradopresente 0, 1 y 2 reclamaciones respectivamente durante el tiempode vigencia del seguro. Suponga que cada una de las posibles recla-maciones de la poliza j es constante zj y que qj,0 qj,1 qj,2 1.Encuentre formulas para EpSq y VarpSq en el modelo individual.
11. Una companıa aseguradora tiene una cartera con polizas de segurosde vida y diferentes sumas aseguradas como se muestra en la tablaque aparece abajo. Calcule EpSq y VarpSq usando el modelo indi-vidual.
Suma Numero Probabilidad deasegurada de polizas reclamacion
$10,000 50 0.0040$20,000 75 0.0035$30,000 100 0.0030

36 1. El modelo individual y el modelo colectivo
12. Considere el modelo individual de riesgo para una cartera de n 56asegurados divididos en cinco subgrupos de la siguiente forma: 11asegurados con probabilidad de reclamacion q 0.01, 7 aseguradoscon q 0.015, 20 asegurados con q 0.02, 10 asegurados con q
0.025 y 8 asegurados con q 0.03. Todos ellos con suma asegurada$100. Calcule el valor esperado del agregado de reclamaciones delriesgo correspondiente a esta cartera de asegurados.
13. Para el modelo individual, suponga queDj tiene distribucion Berpqq,es decir, qj q ¡ 0 es constante, y que cada reclamacion Cj tienedistribucion exppλq. Encuentre la distribucion de probabilidad delriesgo S.
14. Considere el modelo individual de riesgo S °n
j1DjCj , en donde
C1, C2, . . ., Cn son constantes posiblemente distintas todas ellas, ycada Dj tiene distribucion Berpqjq para j 1, 2, . . . , n.
a) Demuestre que la funcion de probabilidad de la variable DjCj
es
fDjCjpxq
$
&
%
1 qj si x 0,qj si x Cj ,
0 en otro caso.
b) Defina Sj Sj1 DjCj para j 2, 3, . . . , n y S1 D1C1.Demuestre que la funcion de probabilidad de la variable Sj
puede calcularse recursivamente de la siguiente forma: paraj 2, 3, . . . , n,
fSjpxq p1 qjqfSj1
pxq qjfSj1px Cjq.
15. Considere el modelo individual de riesgo en donde todas las tasasde muerte qj son una misma probabilidad q y los montos de lasreclamaciones son iguales a 1. Verfique que las formula generales dela Proposicion 1.2 se reducen a las de la distribucion binomialpn, qq,es decir,
a) EpSq nq.
b) VarpSq nqp1 qq.

1.6. Ejercicios 37
c) MDjCjptq 1 q qet.
d) MSptq p1 q qetqn.
Formula de De Pril
16. Demuestre que la formula recursiva de De Pril [ii] produce efecti-vamente una funcion de probabilidad.
17. A partir de la formula de De Pril [ii] y siguiendo la misma notacionde dicho enunciado, demuestre que:
a) EpSq nEpXq.
b) VarpSq nVarpXq.
18. Sean X1, X2, X3, X4 variables aleatorias independientes con dis-tribucion comun como aparece en la tabla de abajo. Encuentre ladistribucion de X1 X2 X3 X4.
j 0 1 2 3
fj 0.1 0.2 0.3 0.4
19. Sean X1, . . . , Xn variables aleatorias independientes con distribu-cion Berppq. Mediante la formula de De Pril [ii] compruebe que lavariable S X1 Xn tiene distribucion binpn, pq.
20. Sean X1 y X2 dos variables aleatorias independientes con identi-ca distribucion Poissonpλq. Use la formula de De Pril [ii] para de-mostrar que X1 X2 tiene distribucion Poissonp2λq.
21. Sean X1 y X2 dos variables aleatorias independientes con identicadistribucion binpn, pq. Use la formula de De Pril [ii] para demostrarque X1 X2 tiene distribucion binp2n, pq.
Sugerencia:x
j0
n
j
m
x j
nm
x
.
22. Variacion de la formula de De Pril [ii]. Suponga que las variablesaleatorias X1, . . . , Xn en la formula de De Pril [ii] son estrictamentepositivas y toman valores en el conjunto t1, 2, . . .u, con f1 P pX

38 1. El modelo individual y el modelo colectivo
1q 0. Demuestre que la distribucion de S X1 Xn ahoraes la siguiente:
a) gn pf1qn.
b) gxn 1
f1
x
j1
jpn 1q
x 1
fj1 gxnj , para x ¥ 1.
Vease el siguiente ejercicio para una extension de esta formula.
23. Extension de la formula de De Pril [ii]. Suponga que las varia-bles aleatorias X1, . . . , Xn son independientes e identicamente dis-tribuidas pero ahora con valores en el conjunto tm,m 1, . . .upara algun entero m ¥ 1. Sea nuevamente S X1 Xn,fj P pX jq para j ¥ m, con fm 0, y gx P pS xq parax ¥ nm. Demuestre que:
a) gnm pfmqn.
b) gx 1
fm
xnm
j1
jpn 1q
x nm 1
fjm gxj , para x ¥ nm 1.
Sugerencia: las variables Xim, para i 1, . . . , n, ahora ya tienensoporte en el conjunto t0, 1, . . .u, aplique entonces la formula de DePril [ii] demostrada y un cambio de variable adecuado.
Modelo colectivo
24. Para el modelo colectivo de riesgo demuestre que
EpS3q EpNqEpY 3
q 3ErNpN 1qsEpY qEpY 2q
ErNpN 1qpN 2qsE3pY q.
25. Suponga que las variables Y1, Y2, . . . en el modelo colectivo de riesgoson discretas con valores en el conjunto t1, 2, . . .u. Sea fj P pY
jq para j ¥ 1, gx P pS xq para x ¥ 0, y pn P pN nq paran ¥ 0. Demuestre que:
a) g0 p0.

1.6. Ejercicios 39
b) gx
8
¸
n1
fnx pn, para x ¥ 1.
26. A partir de la formula encontrada paraMSptq en el modelo colectivode riesgo, encuentre nuevamente las expresiones para EpSq, EpS2
q
y VarpSq.
27. Considere el modelo colectivo de riesgo S
°Nj1
Yj , en dondeN tiene distribucion Poissonpλq y Y sigue una distribucion lognormalpm,σ2
q. Demuestre que:
a) EpY q exppσ22mq.
b) EpY nq exppnm n2σ2
2q, n ¥ 1.
c) VarpY q peσ2
1q exppσ2 2mq.
d) EpSq λ exppσ22mq.
e) VarpSq λ expp2σ2 2mq.
f) α3 :ErpS EpSqq3s
rVarpSqs32
1?
λexpp3σ2
2q.
28. Transformada de Laplace-Stieltjes. La transformada de Laplace-Stieltjes de una variable aleatoria X o de su funcion de distribucionse define como la funcion
lXptq EpetXq
»
8
8
etx dFXpxq.
Sea PN ptq la funcion generadora de probabilidad de la variable N .Demuestre que para el modelo colectivo de riesgo se cumple la iden-tidad
lSptq PN plY ptqq.
29. Sea PXptq EptXq la funcion generadora de probabilidad de unavariable aleatoria discretaX. Considere un modelo colectivo de ries-go en donde las reclamaciones son discretas con valores en t0, 1, . . .u.Suponiendo la existencia de las funciones involucradas, demuestreque se cumple la identidad
PSptq PN pPXptqq.

40 1. El modelo individual y el modelo colectivo
Modelo binomial compuesto
30. Verifique la validez de las formulas para el modelo binomial com-puesto que aparecen en la Proposicion 1.6 de la pagina 23.
31. Para el modelo binomial compuesto, demuestre las siguientes formu-las:
a) EpS3q npn 1qp2µppn 2qpµ2
3µ2q npµ3.
b) ErpS EpSqq3s nppµ3 3pµµ2 2p2µ3q.
c) α3 :ErpS EpSqq3s
rVarpSqs32¡ 0.
32. Sean S1 y S2 dos riesgos independientes con distribucion binomialcompuesta con parametros pn1, p;Gq y pn2, p;Gq respectivamente.Demuestre que el riesgo S1 S2 tambien sigue una distribucionbinomial compuesta con parametros pn1 n2, p;Gq.
Modelo binomial negativo compuesto
33. Verifique la validez de las formulas para el modelo binomial negativocompuesto de la Proposicion 1.7 en la pagina 24.
34. Para el modelo binomial negativo compuesto, demuestre las siguien-tes formulas:
a) EpS3q kpk 1qpk 2qp1p 1q3µ3
3kpk 1qp1p 1q2µµ2
kp1p 1qµ3.
b) ErpS EpSqq3s kp1p 1qµ3 3kp1p 1q2µµ2
2kp1p 1q3µ3.
c) α3 :ErpS EpSqq3s
rVarpSqs32¡ 0.
35. Sea N con distribucion bin negpk, pq. Demuestre que:
a) P pN 0q pk.
b) P pN n 1q k n
n 1p1 pqP pN nq, para n ¥ 0.

1.6. Ejercicios 41
Modelo Poisson compuesto
36. Verifique la validez de las formulas para el modelo Poisson com-puesto que aparecen en la Proposicion 1.8 de la pagina 25.
37. Para el modelo Poisson compuesto, demuestre las siguientes formu-las:
a) EpS3q λµ3 3λ2µ2µ λ3µ3.
b) ErpS EpSqq3s λµ3.
c) α3 :ErpS EpSqq3s
rVarpSqs32
µ3a
λµ32
¡ 0.
38. Demuestre las formulas para el modelo Poisson compuesto asociadode la pagina 26.
39. Sean F1pxq y F2pxq dos funciones de distribucion con funciones ge-neradoras de momentos M1ptq y M2ptq respectivamente. Demuestreque para cualquier α P r0, 1s, la funcion αF1pxq p1 αqF2pxq esuna funcion de distribucion cuya funcion generadora de momentosasociada es αM1ptq p1 αqM2ptq. Este resultado fue utilizadoen el analisis de la suma de dos riesgos con distribucion Poissoncompuesta.
40. Sean S1, . . . , Sn riesgos independientes con distribucion Poisson com-puesta con parametros λ1, . . . , λn, respectivamente. Suponga quelos montos de las reclamaciones de estos riesgos son Y p1q, . . . , Y pnq,con funcion de distribucion G1pxq, . . . , Gnpxq, respectivamente. De-muestre que el riesgo S S1 Sn tambien sigue una dis-tribucion Poisson compuesta con parametro λ λ1 λn, y lafuncion de distribucion de las reclamaciones es
Gpxq λ1
λG1pxq
λn
λGnpxq.
41. Sean S1 y S2 dos riesgos independientes, el primero con distribucionPoisson comppλ1, F1q con λ1 50, y el segundo con distribucionPoisson comppλ2, F2q con λ2 100, en donde F1pxq mıntx, 1upara x ¥ 0, y F2pxq 1ex para x ¥ 0. Encuentre la distribucion

42 1. El modelo individual y el modelo colectivo
de S S1 S2 y la funcion de distribucion de las reclamacionesdel riesgo S.
42. Sean S1 y S2 dos riesgos independientes con distribucion Poissoncompuesta, el primero Poisson comppλ1, F1q con λ1 10, y el se-gundo Poisson comppλ2, F2q con λ2 20. Suponga que las reclama-ciones de ambos riesgos son de magnitud 50 o 100, y por lo tantotienen la siguiente funcion de distribucion:
F pxq
$
&
%
0 si x 50,p si 50 ¤ x 100,1 si x ¥ 100.
Suponga que el parametro p es igual a 12 para el primer riesgo y es13 para el segundo riesgo. Encuentre la distribucion de S S1S2
y la funcion de distribucion de las reclamaciones del riesgo S.
43. Sea X1, X2, . . . una sucesion de variables aleatorias independientescada una de ellas con distribucion Berppq y sea X0 0. Sea N otravariable aleatoria con distribucion Poissonpλq independiente de lasanteriores. Defina la variable
X
N
i0
Xi.
Demuestre queX tiene distribucion Poissonpλpq. Esta variable tienela siguiente interpretacion: si N representa el total de siniestrosocurridos y cada siniestro es reportado con probabilidad p, entoncesX representa el total de siniestros ocurridos y reportados.
44. Sea Y una variable aleatoria con funcion de distribucion F pyq, ysean a b dos numeros tales que F paq F pbq. Demuestre que lafuncion de distribucion condicional de Y dado el evento pY P pa, bsq
es
F py |Y P pa, bsq
$
'
'
&
'
'
%
0 si y a,F pyq F paq
F pbq F paqsi a ¤ y ¤ b,
1 si y ¡ b.

1.6. Ejercicios 43
Aplique este resultado al caso cuando Y tiene distribucion exppαq.Encuentre y grafique ambas funciones de distribucion: la original yla condicional.
Modelo Poisson compuesto mixto
45. Verifique la validez de las formulas de la Proposicion 1.11 de lapagina 32.
46. Para el modelo Poisson compuesto mixto, demuestre que:
a) EpS3q EpΛqµ3 3EpΛ2
qµ2µ EpΛ3qµ3.
b) ErpSEpSqq3s ErpΛEpΛqq3sµ3 3VarpΛqµ2µEpΛqµ3.
Esperanza condicional
47. Sea pX,Y q un vector aleatorio discreto con la funcion de probabili-dad
fX,Y px, yq
"
px yq36 si x, y 1, 2, 3,0 en otro caso.
a) Encuentre la distribucion de la variable aleatoria EpX |Y q.
b) Compruebe que EpEpX |Y qq EpXq 7836.

Capıtulo 2
Formula de Panjery algunos metodosde aproximacion
En este capıtulo se presenta la famosa formula de Panjer. Este resultadoproporciona una expresion exacta, aunque recursiva, de la distribucion deprobabilidad de un riesgo en el modelo colectivo y es valida cuando la dis-tribucion del numero de reclamaciones y los montos cumplen ciertas condi-ciones. Se presentan ademas algunos metodos de aproximacion con validezgeneral para estimar la distribucion de un riesgo. Estos metodos generalesde aproximacion pueden ser utiles cuando no se cumplen las condicionesrequeridas para aplicar la formula de Panjer.
2.1. Formula de Panjer
Primeramente se enuncia la condicion que debe satisfacer el numero dereclamaciones para obtener la formula de Panjer.
45

46 2. Formula de Panjer y metodos de aproximacion
Proposicion 2.1 Sea N una variable aleatoria discreta con valores ent0, 1, . . .u y sea pk P pN kq para k 0, 1, . . . Sean a y b dos cons-tante. Entonces la igualdad
pk pab
kq pk1, k ¥ 1, (2.1)
se cumple cuando
1. N es binpn, pq, con a pp1 pq y b pn 1qpp1 pq.
2. N es Poissonpλq, con a 0 y b λ.
3. N es bin negpr, pq, con a 1 p y b pr 1qp1 pq.
La demostracion de este resultado es inmediata despues de realizar algunoscalculos algebraicos sencillos y se dejan como ejercicio al lector.
Toda distribucion de probabilidad con soporte en t0, 1, . . .u que cumple laidentidad (2.1) se le llama distribucion de clase pa, b, 0q, los terminos a yb se refieren a las constantes del mismo nombre que aparecen en la formu-la (2.1) y el cero se refiere a que la probabilidad de inicio de la formularecursiva es aquella que tiene subındice cero, es decir, p0. Observe que laidentidad (2.1) es muy atractiva, pues permite generar la distribucion deprobabilidad de estas variables aleatorias discretas de una forma recursi-va: se calcula primero p0, a partir de ella se obtiene p1, a partir de p1 seobtiene p2, y ası sucesivamente. Supondremos entonces que la distribuciondel numero de reclamaciones cumple con la condicion (2.1) y la proposicionestablece que tal condicion es valida para las tres distribuciones senaladas.En el ejercicio 48 en la pagina 61 se pide demostrar el resultado recıprocode la proposicion anterior, es decir, que las unicas distribuciones discretasde probabilidad no degeneradas que cumplen (2.1) son las tres mencionadas.
Recordando la notacion e hipotesis del modelo colectivo de riesgo S
°Nj1
Yj , definido en el capıtulo anterior, tenemos las siguientes hipotesisy notacion adicionales: supondremos que las reclamaciones Yj son tales que

2.1. Formula de Panjer 47
P pYj P Nq 1, lo cual no es ningun problema pues puede considerarseque las reclamaciones se efectuan en unidades monetarias, cualesquiera queestas sean. En los calculos que haremos a continuacion usaremos los siguien-tes sımbolos:
Notacion
pk P pN kq k 0, 1, . . .
fr P pY rq r 1, 2, . . .
fkr P pY1 Yk rq 1 ¤ k ¤ r 1, 2, . . .
gr P pS rq r 0, 1, . . .
En particular, para 1 ¤ k 1 ¤ r,
fpk1qr pfk fqr
r1
i1
fki fri.
Ademas, g0 P pS 0q P pN 0q p0 y para r ¥ 1,
gr P pS rq
8
¸
k1
P pS r |N kqP pN kq
8
¸
k1
fkr pk.
Proposicion 2.2 Bajo la notacion e hipotesis anteriores, se cumplen lassiguientes igualdades:
1. Ep Y1 |
k
j1
Yj r q r
k, para k ¥ 1.
2. pk fkr pk1
r1
i1
pabi
rq f
pk1q
ri fi, para k ¥ 2.

48 2. Formula de Panjer y metodos de aproximacion
Demostracion. Para el primer inciso, por identica distribucion,
Ep Y1 |
k
j1
Yj r q
1
k
k
i1
Ep Yi |
k
j1
Yj r q
1
kEp
k
i1
Yi |
k
j1
Yj r q
r
k.
Para el segundo inciso desarrollamos el lado derecho,
pk1
r1
i1
pabi
rqfpk1q
ri fi pk1
r
i1
pabi
rqP pY2 Yk r iqP pY1 iq
pk1
r
i1
pabi
rqP pY1 i, Y2 Yk r iq
pk1
r
i1
pabi
rqP pY1 i,
k
j1
Yj rq
pk1
r
i1
pabi
rqP pY1 i |
k
j1
Yj rqfkr
pk1EpabY1
r|
k
j1
Yj rqfkr
pk1pab
kqfkr
pkfkr
¥
Ahora estamos listos para enunciar y demostrar la formula de Harry Pan-jer [27], publicada en 1981.

2.1. Formula de Panjer 49
Teorema 2.1 (Formula de Panjer) Para un riesgo S que sigue el mo-delo colectivo en donde las reclamaciones Y son de la clase pa, b, 0q, laprobabilidad gr P pS rq esta dada por
gr
r
i1
pabi
rq fi gri, para r ¥ 1.
g0 p0,
en donde p0 P pN 0q y fi P pY iq para i ¥ 1.
Demostracion. Hemos observado antes que g0 P pN 0q p0. Parael caso r ¥ 1,
gr
8
¸
k1
P pS r |N kqP pN kq
8
¸
k1
pk fkr
p1 fr
8
¸
k2
pk fkr
pa bq p0 fr
8
¸
k2
r1
i1
pabi
rq pk1 f
pk1q
ri fi
pa bq p0 fr
r1
i1
pabi
rqfi
8
¸
k2
pk1 fpk1q
ri
pa bq p0 fr
r1
i1
pabi
rq fi gri
r
i1
pabi
rq fi gri.
¥

50 2. Formula de Panjer y metodos de aproximacion
Observe que cuando las reclamaciones son constantes y unitarias, es decir,f1 P pY 1q 1, entonces S N y la formula de Panjer se reducea la formula recursiva (2.1) de las distribuciones pa, b, 0q. A continuacionescribimos explıcitamente los primeros terminos de la formula recursiva dePanjer:
g0 p0 P pN 0q
g1 pab
1qf1g0
g2 pab
2qf1g1 pa
2b
2qf2g0
g3 pab
3qf1g2 pa
2b
3qf2g1 pa
3b
3qf3g0
...
Ejemplo 2.1 Consideremos el caso cuando N sigue una distribucion Poi-sson de parametro λ 3.5 y el monto de las reclamaciones tiene la siguientefuncion de densidad:
r 1 2 3 4 5
fr 0.1 0.1 0.2 0.3 0.3
Entonces la formula de Panjer produce la funcion de probabilidad para S quese muestra en la Figura 2.1. El codigo en R correspondiente se encuentraen el apendice.
Aproximacion en el caso de reclamaciones continuas
Cuando los montos de las reclamaciones toman valores continuos, puedeusarse el siguiente metodo de discretizacion de estos montos para poderaplicar la formula de Panjer. Se toma cualquier unidad monetaria ρ ¡ 0 yse definen las variables aleatorias enteras:
Y j ınf tn P N : Yj ¤ nρ u,
y Y j sup tn P N : Yj ¥ nρ u,
en donde tambien se define ınfH 0. Entonces,
ρY j ¤ Yj ¤ ρY j .

2.1. Formula de Panjer 51
0.03
5 10 15 20
r
gr
Figura 2.1
Por ejemplo, para la situacion que se muestra en la Figura 2.2 se tiene queY j 4 y Y j 3, y efectivamente se cumple que 3ρ ¤ Yj ¤ 4ρ.
0 ρ 2ρ 3ρ 4ρ 5ρ
nρ
b
Yj
Figura 2.2
Se definen entonces los siguientes riesgos cuyas reclamaciones ahora sonenteras:
S
N
j1
Y j , y S
N
j1
Y j .
Entonces se cumple que
ρS ¤ S ¤ ρS, (2.2)
de donde obtendremos el siguiente resultado.

52 2. Formula de Panjer y metodos de aproximacion
Proposicion 2.3 Para cualquier x ¡ 0,
P pS ¤ xρq ¤ P pS ¤ xq ¤ P pS ¤ xρq.
Demostracion. Por (2.2) se cumple la contencion de eventos
pS ¤ xq pρS ¤ xq,
entonces se tiene que P pS ¤ xq ¤ P pρS ¤ xq y por lo tanto,
P pS ¤ xq ¤ P pS ¤ xρq.
Para la segunda desigualdad, se observa la contencion de los eventos
pρS ¤ xq pS ¤ xq,
y se procede de manera analoga. ¥
Esto provee de cotas superior e inferior, calculadas usando la formula dePanjer, para la funcion de distribucion del riesgo. Conforme mas pequenasea la unidad monetaria ρ mejor es la aproximacion. Debe observarse, sinembargo, que surge una dificultad tecnica para aquellas reclamaciones Yjcon valores en p0, ρq, pues estas reclamaciones llevan a la definicion Y j 0,lo cual no es un caso contemplado en el esquema de la formula de Panjer. Enuna situacion real, el monto de las reclamaciones es grande comparado con elvalor del parametro ρ, de modo que la probabilidad de que una reclamaciontome un valor entre 0 y ρ es realmente muy pequena. Existe tambien uncaso particular simple que es cuando ρ 1, es decir, se aproximan lasreclamaciones mediante valores enteros.
Ejemplo 2.2 (Aproximacion con reclamaciones enteras) Para cadavalor de una reclamacion Yj existe un entero n ¥ 0 tal que n ¤ Yj n 1,y por lo tanto,
Y j n, y Y j n 1.
Entonces se tienen nuevamente las relaciones S ¤ S ¤ S y en consecuenciapara cualquier x ¡ 0,
P pS ¤ xq ¤ P pS ¤ xq ¤ P pS ¤ xq,
2.2. Aproximacion normal 53
en donde S y S son riesgos con reclamaciones enteras para los cuales puedeaplicarse la formula de Panjer y obtener su distribucion (exceptuando unpequeno error obtenido por el caso Y j 0). En cualquier caso podemos serprudentes y tomar las reclamaciones de manera sobreestimada: para n ¥ 0,
Y j n 1 cuando Y P pn, n 1s.
De esta forma cualquier valor continuo de una reclamacion en el intervalopn, n 1s se considera como si fuera de magnitud n 1. Por lo tanto,los montos de las reclamaciones estan siendo ligeramente sobrevaluadas: siGpxq denota la funcion de distribucion de una reclamacion Y cualquiera,entonces
P pY j n 1q Gpn 1q Gpnq, n 0, 1, 2, . . .
En las siguientes secciones estudiaremos algunos metodos generales paraaproximar la distribucion de probabilidad de un riesgo en el modelo colec-tivo. Estas aproximaciones son muy generales y no presuponen el cumpli-miento de las hipotesis para la validez de la formula de Panjer, es decir,el numero de reclamaciones no necesariamente tiene una distribucion en laclase pa, b, 0q, ni el monto de las reclamaciones es necesariamente discreto.Por otro lado, el problema de estimar el error en estas aproximaciones esmuy general y no nos ocuparemos de ello.
2.2. Aproximacion normal
Si la distribucion de probabilidad del numero de reclamaciones N se concen-tra mayormente en valores grandes, entonces el teorema central del lımitesugiere aproximar la distribucion del riesgo S mediante la distribucion nor-mal. Suponga que la esperanza de S es m y la varianza es σ2. Entonces,para x ¡ 0,
P pS ¤ xq P pS m
σ¤
xm
σq
Φpxm
σq.
Derivando esta expresion se encuentra una formula aproximada para la fun-cion de densidad de S.

54 2. Formula de Panjer y metodos de aproximacion
Proposicion 2.4 (Aproximacion normal) Sea S es una riesgo con me-dia m y varianza finita σ2. Para cualquier x ¡ 0,
fSpxq 1
σφp
xm
σq. (2.3)
Esta aproximacion hace uso unicamente de la media y la varianza del riesgo,y en general no es una buena aproximacion a menos que la densidad delriesgo presente la forma de campana o bien el numero de reclamaciones tengauna distribucion tal que sea razonable aplicar el teorema central del lımite,esto es, cuando la distribucion de probabilidad se concentre en un conjuntode valores grandes de la variable aleatoria. Por ejemplo, dada cualquier ǫ ¡ 0suficientemente pequena, la aproximacion podrıa ser buena si los parametrosde la distribucion de N son tales que
P pN ¥ 30q ¥ 1 ǫ.
Se puede particularizar la aproximacion normal cuando la distribucion deN es conocida, por ejemplo, cuando el numero de reclamaciones N sigueuna distribucion Poisson con parametro λ, la aproximacion (2.3) adquierela expresion
fSpxq 1
?
λµ2
φpx λµ?
λµ2
q.
Otro caso particular se obtiene cuando N es binpn, pq, entonces la expresion(2.3) se reduce a la formula siguiente
P pS ¤ xq Φpx npµ
a
nppµ2 µ2pqq.
En el caso cuando N es bin negpr, pq se tiene que (2.3) es
P pS ¤ xq Φpx rp1 pqµp
a
rp1 pqrµ2p p1 pqµ2p2s
q.

2.3. Aproximacion gama trasladada 55
2.3. Aproximacion gama trasladada
En algunos casos el histograma creado a partir de las observaciones histori-cas de un riesgo puede presentar un aspecto semejante a la forma de ladistribucion gama. Esta semejanza sugiere aproximar la distribucion delriesgo S por la distribucion de la variable aleatoria
k Z,
en donde k es una constante y Z es una variable aleatoria con distribuciongamapγ, αq. En los ejemplos concretos que hemos presentado en donde seha calculado la distribucion exacta del riesgo, usando la formula de De Prilo la formula de Panjer, puede constatarse que la distribucion de algunosriesgos tienen algun parecido con la distribucion gama. Es por ello que sepropone este metodo de aproximacion. Para llevar a cabo este procedimientose deben escoger adecuadamente valores para los tres parametros k, γ y α,que determinan la distribucion de kZ. Supongamos entonces conocidas oestimadas las siguientes cantidades:
a) EpSq m.
b) VarpSq σ2.
c)ErpS EpSqq3s
rVarpSqs32 α3.
La correspondiente media, varianza y coeficiente de asimetrıa (de Fisher)de la variable aleatoria aproximante k Z son:
a) Epk Zq k γα.
b) Varpk Zq γα2.
c)Erpk Z Epk Zqq3s
rVarpk Zqs32 2
?
γ.
La idea es hacer que las distribuciones de S y k Z coincidan en el sen-tido de que las tres cantidades mencionadas sean las mismas para las dosdistribuciones. Haciendo coincidir estas cantidades se obtiene el sistema deecuaciones
k γ
α m,
γ
α2 σ2,
2?
γ α3,

56 2. Formula de Panjer y metodos de aproximacion
cuya solucion es
k m
2σ
α3
, γ 4
α23
, α 2
σα3
.
De esta forma se tiene la siguiente aproximacion.
Proposicion 2.5 (Aproximacion gama trasladada) La distribuciondel riesgo S en el modelo colectivo puede aproximarse mediante la dis-tribucion de la variable aleatoria
m
2σ
α3
Z,
en donde Z se distribuye gamap4
α23
,2
σα3
q.
Pueden sustituirse las expresiones generales para la media, varianza y coefi-ciente de asimetrıa de un riesgo que sigue el modelo colectivo para obtenerformulas un poco mas particulares de esta aproximacion. Debe hacerse no-tar que la aproximacion gama es en esencia la aplicacion del metodo de mo-mentos para la estimacion de parametros y naturalmente el metodo puedeaplicarse a cualquiera otra distribucion de probabilidad conocida que tengaalguna semejanza o parecido con la distribucion del riesgo en estudio.
2.4. Aproximacion de Edgeworth
Considere un cierto riesgo S modelado mediante una variable aleatoria conesperanza m, varianza σ2 y tal que su funcion generadora de momentosexiste. Defina la variable Z pSmqσ, cuya esperanza es cero y varianzaes 1. Sea MZprq la funcion generadora de momentos de Z. La serie de Taylorde la funcion lnMZprq alrededor de cero es
lnMZprq a0 a1r a2
2!r2
a3
3!r3
a4
4!r4 ,

2.4. Aproximacion de Edgeworth 57
en donde los coeficientes son ak dk
drklnMZprq
r0
. Calculando las derivadas
y evaluando en cero se encuentra que los primeros cinco coeficientes son:
a0 0,
a1 EpZq 0,
a2 EpZ2q 1,
a3 EpZ3q,
a4 EpZ4q 3,
...
La aproximacion de Edgeworth consiste en truncar la serie de Taylor dela funcion lnMZprq hasta algun termino adecuado. Por ejemplo, la aproxi-macion hasta la cuarta potencia de r es
lnMZprq 1
2!r2
a3
3!r3
a4
4!r4.
Entonces
MZprq expp1
2!r2
a3
3!r3
a4
4!r4q
er22 expp
a3
6r3
a4
24r4q.
Ahora se usa la serie ex 1 x x22! x33! en el segundo factory se obtiene la aproximacion
MZprq er22p1
a3
6r3
a4
24r4
a2372
r6q
er22
a3
6r3er
22
a4
24r4er
22
a3372
r6er22. (2.4)
El siguiente paso es invertir cada termino de esta ecuacion encontrandouna distribucion aproximada para Z. El resultado que utilizaremos es elsiguiente.

58 2. Formula de Panjer y metodos de aproximacion
Proposicion 2.6 Si φpxq es la funcion de densidad de la distribucion nor-mal estandar, entonces para cualquier entero n ¥ 0,
»
8
8
erxp1qnφpnqpxq dx rner22.
Demostracion. Primeramente tenemos que para n 0,
»
8
8
erxφpxq dx er22,
es decir, er22 es la funcion generadora de momentos de la distribucion nor-
mal estandar. Multiplicando por r tenemos que
rer22
»
8
8
rerxφpxq dx
»
8
8
p
d
dxerxqφpxq dx
»
8
8
erxφ1pxq dx.
Es decir, rer22 es la transformada de Laplace de φ1pxq. Procediendo de
manera analoga, multiplicando sucesivamente por r, se llega a la formulaanunciada. ¥
En particular, se ha demostrado que rer22 es la transformada de Laplace
de φ1pxq. En este caso usamos el termino transformada de Laplace y nofuncion generadora de momentos, pues la funcion φ1pxq no es una funcionde densidad. Entonces el resultado anterior establece que la funcion rner
22
es la transformada de Laplace de p1qnφpnqpxq. El siguiente paso es invertircada uno de los terminos de la igualdad (2.4), aunque realmente que no seesta calculando de manera formal la inversa de la funcion generadora demomentos (o transformada de Laplace) sino que se esta usando el hecho deque si dos distribuciones de probabilidad tienen la misma funcion generadora

2.4. Aproximacion de Edgeworth 59
de momentos, entonces las distribuciones coinciden. Ası, invirtiendo terminoa termino la igualdad (2.4), se obtiene
fZpzq φpzq a3
6φp3qpzq
a4
24φp4qpzq
a2372
φp6qpzq. (2.5)
Recordemos que hemos definido Z pS mqσ, por lo tanto la funcion dedensidad de S m σZ esta dada por
fSpxq 1
σfZp
xm
σq,
y de esta forma se llega al siguiente resultado:
Proposicion 2.7 (Aproximacion de Edgeworth) Sea S un riesgo conmedia m, varianza σ2 y cuya funcion generadora de momentos existe. En-tonces la funcion de densidad de S puede aproximarse de la siguiente forma:
fSpxq 1
σrφp
xm
σq
a3
6φp3qp
xm
σq
a4
24φp4qp
xm
σq
a2372
φp6qpxm
σq s.
Derivando directamente la funcion de densidad φpxq de la distribucion nor-mal estandar puede demostrarse que
φp3qpxq p3x x3qφpxq,
φp4qpxq p3 6x2 x4qφpxq,
φp6qpxq p15 45x2 15x4 x6qφpxq.
Estas expresiones pueden sustituirse en la aproximacion de Edgeworth paraobtener una expresion en terminos de unicamente la funcion φpxq. Observeque el primer sumando en la aproximacion de Edgeworth corresponde ala funcion de densidad normal con media m y varianza σ2. No es difıcilverificar ademas que cuando el riesgo S sigue una distribucion normal, laaproximacion de Edgeworth es exacta, pues produce como resultado la mis-ma distribucion con los mismos parametros.

60 2. Formula de Panjer y metodos de aproximacion
La aproximacion de Edgeworth puede expresarse tambien en terminos de lafuncion de distribucion de la siguiente forma: integrando (2.5) se obtiene
FZpzq Φpzq a3
6Φp3qpzq
a4
24Φp4qpzq
a2372
Φp6qpzq,
considerando la identidad FSpxq FZppxmqσq, se tiene que la aproxima-cion de Edgeworth para un riesgo S en terminos de la funcion de distribuciones
FSpxq Φpxm
σq
a3
6Φp3qp
xm
σq
a4
24Φp4qp
xm
σq
a2372
Φp6qpxm
σq,
en donde derivando directamente la funcion Φpzq puede demostrarse que
Φp3qpzq pz2 1qφpzq,
Φp4qpzq pz3 3zqφpzq,
Φp6qpzq pz5 10z3 15zqφpzq.
Comentarios y referencias
Hemos dedicado este pequeno capıtulo a la presentacion de la formula dePanjer. Dentro de su ambito de aplicacion, esta importante formula pro-porciona un mecanismo recursivo para calcular de manera exacta la dis-tribucion de probabilidad de un riesgo que sigue el modelo colectivo. Debetenerse cuidado en la implementacion en computadora de esta formula, puespodrıan presentarse problemas numericos por cuestiones de redondeo o ba-ja precision en los calculos. Cuando las hipotesis para aplicar la formula dePanjer no se cumplen, se cuenta con algunos metodos para aproximar ladistribucion del riesgo y hemos presentado solo unos pocos de ellos, dejandode lado el problema general de establecer condiciones bajo las cuales losmetodos de aproximacion mencionados son adecuados. El material de estecapıtulo esta basado en las notas de Schmidli [34]. Otras referencias en eltema son: Dickson [13] y Rolski et al. [32].

2.5. Ejercicios 61
2.5. Ejercicios
Distribuciones de la clase pa, b, 0q
48. Las cuatro distribuciones de la clase pa, b, 0q. Sea tpk : k ¥ 0u unadistribucion de probabilidad en la clase pa, b, 0q, es decir, se tratade una distribucion discreta con soporte el conjunto t0, 1, . . .u y talque cumple la relacion pk pa bkq pk1 para k ¥ 1, en dondea y b son dos constantes. Observe que tomando el caso particularcuando k 1, se llega a la conclusion de que las constantes debensatisfacer la desigualdad a b ¥ 0.
a) Demuestre que en el caso ab 0, la distribucion se concentraen cero, es decir, p0 1.
b) Demuestre que si a b ¡ 0 y a 0 entonces tpk : k ¥ 0u es ladistribucion Poissonpλq con λ b ¡ 0.
c) Demuestre que si a b ¡ 0 y a ¡ 0 entonces para cualquierk ¥ 1,
pk ak
k!pk
b
aqpk 1
b
aq p2
b
aqp1
b
aqp0. (2.6)
Defina r 1 ba e incorpore este valor en (2.6). Concluyaque tpk : k ¥ 0u es la distribucion bin negpr, pq con p 1 a.
d) Observe que si a b ¡ 0 y a 0, y si la relacion iterativa esvalida para cualquier k ¥ 1 como hemos supuesto, entoncesnecesariamente los valores de las constantes a y b deben sertales que exista un entero n ¥ 1 tal que
ab
n¡ 0 y a
b
n 1 0.
Y por lo tanto se debe tener que pk 0 para k n1, n2, . . .De la igualdad anterior obtenga n ba 1. Compruebela validez de la ecuacion (2.6) para 0 ¤ k ¤ n e incorporeallı el valor de n. Concluya que tpk : k ¥ 0u es la distribucionbinomialpn, pq con p apa 1q.

62 2. Formula de Panjer y metodos de aproximacion
49. Funcion generadora de probabilidad de una distribucion en la clasepa, b, 0q. Sea N una variable aleatoria con distribucion de probabi-lidad en la clase pa, b, 0q.
a) Demuestre que la correspondiente funcion generadora de pro-babilidad PN ptq EptN q satisface la ecuacion diferencial
p1 atqP1
N ptq pa bqPN ptq. (2.7)
b) Demuestre que la solucion a la ecuacion (2.7) con condicioninicial PN p1q 1 y para a R t0, 1u es
PN ptq
1 at
1 a
pabqa
.
c) En particular, demuestre que
i) P pN 0q p1 aqpabqa para a 0.
ii) lımaÑ0
P pN 0q eb.
50. Formula para la esperanza de una distribucion en la clase pa, b, 0q.Sea N una variable aleatoria con distribucion de probabilidad enla clase pa, b, 0q. A partir de la definicion elemental de esperanza, obien, usando la formula (2.7) del ejercicio anterior, demuestre quepara a 1,
EpNq a b
1 a.
Formula de Panjer
51. Compruebe que la formula recursiva de Panjer efectivamente pro-duce una funcion de probabilidad.
52. A partir de la formula recursiva de Panjer compruebe nuevamenteque
EpSq EpNqEpY q.

2.5. Ejercicios 63
53. Formula recursiva para los momentos de S. Use la formula de Pan-jer y la misma notacion e hipotesis de dicho resultado para de-mostrar que para a 1 y para n ¥ 1,
EpSnq
1
1 a
n1
i0
a
n
i
b
n 1
i
EpSiqEpY ni
q.
54. Formula recursiva para la funcion de distribucion de S en un casoparticular. En general es difıcil encontrar una expresion recursivapara la funcion de distribucion F pxq de un riesgo S en el modelocolectivo. Sin embargo, para el siguiente caso particular es posi-ble encontrar dicha relacion: usando la notacion e hipotesis de laformula de Panjer y en el caso cuando N tiene una funcion de pro-babilidad geoppq, es decir, pk P pN kq p1 pqkp, para k ¥ 0,demuestre que para x ¥ 1,
F pxq p p1 pq
x
j1
fj F px jq.
55. Suponga que un riesgo S sigue un modelo colectivo en donde N
tiene una distribucion Poisson de parametro λ 2 y el monto delas reclamaciones tiene la funcion de probabilidad que aparece en latabla de abajo. Use la formula de Panjer para encontrar la funcionde probabilidad de S.
r 1 2
fr 1/2 1/2
56. Suponga que un riesgo S sigue un modelo colectivo en dondeN tieneuna distribucion geometrica de parametro p 12, y el monto delas reclamaciones tiene la funcion de probabilidad que aparece en latabla de abajo. Use la formula de Panjer para encontrar la funcionde probabilidad de S.
r 1 2
fr 1/2 1/2

64 2. Formula de Panjer y metodos de aproximacion
Aproximacion normal
57. Sea S un riesgo con distribucion gamapn, λq en donde n es un entero.
a) Asigne valores a los parametros n y λ y calcule la aproximacionnormal para S.
b) Para fines comparativos y con ayuda de algun paquete com-putacional, grafique tanto la funcion de densidad gama comola densidad normal aproximante.
c) Duplique el valor de n y grafique nuevamente las dos funciones.¿Mejoro la aproximacion?
58. Suponga que un cierto riesgo S tiene una distribucion Poisson com-puesta con parametro λ 50, en donde los montos de las reclama-ciones siguen una distribucion uniforme(0, 10). Use la aproximacionnormal para encontrar el valor de la prima p tal que:
a) P pS ¡ pq ¤ 0.05.
b) P pS ¡ pq ¤ 0.01.
59. Suponga que un riesgo S sigue una distribucion Poisson compuestacon parametro λ 40 y los montos de las reclamaciones tienendistribucion exppαq con α 10. Use la aproximacion normal paraestimar la probabilidad P pS ¡ EpSqq.
60. Suponga que un riesgo S sigue una distribucion Poisson compuestacon parametro λ 30 y los montos de las reclamaciones tienen dis-tribucion Paretop4, 3q. Use la aproximacion normal para comprobarque el valor de la prima p que cumple la condicion P pS ¡ pq ¤ 0.01es p 38.0194 .
61. Suponga que un riesgo S sigue un modelo colectivo Poisson deparametro λ y las reclamaciones tiene la funcion de probabilidadque aparece en la siguiente tabla:
r 1 2 3
fr 1/3 1/3 1/3

2.5. Ejercicios 65
a) Suponga λ 30. Use la formula de Panjer para encontrar lafuncion de probabilidad de S.
b) Calcule la aproximacion normal para S.
c) Con ayuda de un paquete computacional grafique la funcionde probabilidad de S y la densidad normal aproximante.
d) Suponga ahora λ 60 y repita los incisos anteriores. ¿Mejoro laaproximacion?
Aproximacion gama trasladada
62. Sea S un riesgo con distribucion gamapγ, αq. Demuestre que:
a) ErpS γαq3s 2γα3.
b) la aproximacion gama trasladada para S es exacta.
63. Compruebe que la aproximacion gama trasladada para un riesgocon distribucion exponencial es exacta.
64. Durante la derivacion de la aproximacion gama trasladada se usael hecho de que la variable aleatoria k Z, en donde Z tieneuna distribucion gamapγ, αq, tiene media, varianza y coeficiente deasimetrıa k γα, γα2 y 2
?
γ respectivamente. Demuestre estasformulas.
65. Durante la derivacion de la aproximacion gama trasladada se llegaal sistema de ecuaciones k γα m, γα2
σ2 y 2?
γ α3, endonde k, γ y α son las incognitas. Demuestre que la solucion a estesistema es efectivamente k m 2σα3, γ 4α2
3 y α 2σα3.
66. Encuentre una expresion para la aproximacion gama trasladadacuando el riesgo sigue una distribucion:
a) Poisson compuesta.
b) binomial compuesta.
c) binomial negativa compuesta.

66 2. Formula de Panjer y metodos de aproximacion
67. Suponga que Z tiene una distribucion gamapγ, αq. Demuestre quesi 2γ es un numero entero natural, entonces 2αZ tiene una distribu-cion χ2
p2γq.
68. Suponga que un riesgo S sigue un modelo colectivo Poisson deparametro λ 10 y las reclamaciones tienes la funcion de pro-babilidad que aparece en la siguiente tabla:
r 1 2 3 4 5
fr 1/8 1/4 1/4 1/4 1/8
a) Use la formula de Panjer para encontrar la funcion de proba-bilidad exacta de S.
b) Calcule la aproximacion gama trasladada para S.
c) Con ayuda de un paquete computacional grafique la funcionde probabilidad exacta de S y la densidad aproximante.
Aproximacion de Edgeworth
69. Demuestre que la aproximacion de Edgeworth para un riesgo condistribucion normal con media m y varianza σ2 produce esta mismadistribucion con los mismos parametros. Recuerde que si Z tieneuna distribucion normal estandar, entonces los momentos imparesde esta variable aleatoria se anulan y para cualquie numero naturaln,
EpZ2nq
p2nq!
2n n!.
70. Suponga que S tiene una distribucion Poisson compuesta de para-metro λ ¡ 0 y que se desea usar la aproximacion de Edgeworthpara S. Demuestre que
ak dk
drklnMZprq
r0
λµkpλµ2qk2, para k 2, 3, 4.

2.5. Ejercicios 67
En consecuencia,
P pS ¤ xq Φpx λµ?
λµ2
q
λµ3pλµ2q32
6Φp3qp
x λµ?
λµ2
q
λµ4pλµ2q2
24Φp4qp
x λµ?
λµ2
q
λ2µ23pλµ2q
3
72Φp6qp
x λµ?
λµ2
q.
71. Suponga que S tiene una distribucion Poisson compuesta de para-metro λ ¡ 0 y que se desea usar la aproximacion de Edgeworthpara S. Suponga adicionalmente que el monto de las reclamacionessiguen una distribucion Paretop4, 3q. Demuestre que µ4 8 y porlo tanto la formula del ejercicio anterior no puede aplicarse.
72. Sea S un riesgo con distribucion exppλq.
a) Calcule la aproximacion de Edgeworth de S.
b) Asigne un valor al parametro λ y con ayuda de un paquetecomputacional grafique tanto la funcion densidad exponencialcomo la funcion aproximante.
73. Suponga que un riesgo S sigue un modelo colectivo Poisson deparametro λ 10 y las reclamaciones tienes la funcion de pro-babilidad que aparece en la siguiente tabla:
r 1 2 3 4 5
fr 1/2 1/4 1/8 1/16 1/16
a) Use la formula de Panjer para encontrar la funcion de proba-bilidad exacta de S.
b) Calcule la aproximacion de Edgeworth para S.
c) Con ayuda de un paquete computacional grafique la funcionde probabilidad exacta de S y la densidad aproximante.

Capıtulo 3
Principios para el calculode primas
Hemos mencionado antes que una prima es un pago por adelantado que unasegurado realiza a una companıa aseguradora para obtener una coberturaparcial o completa contra un riesgo determinado, en los terminos y condi-ciones que establece la poliza del seguro. En este capıtulo vamos a estudiaralgunas reglas generales para calcular el valor de una prima tomando enconsideracion unicamente los aspectos matematicos del riesgo, es decir, noconsideraremos cuestiones administrativas o mercadologicas del negocio delseguro, las cuales en situaciones practicas son indispensables de considerar.Denotaremos por p, pS o ppSq a la prima para cubrir un riesgo S. De estamanera, a la formula para calcular una prima se le puede considerar comouna funcion numerica de la variable aleatoria S o de su distribucion.
3.1. Propiedades
¿Que propiedades es razonable que cumpla una funcion ppSq para el calculode las primas? Vamos a enunciar a continuacion algunas propiedades gene-rales que son deseables que posea cualquier metodo para calcular primas.
69

70 3. Principios para el calculo de primas
Simplicidad
El calculo de la prima debe ser facil de calcular. La simplicidad en el calculode la prima es deseable que se cumpla por varias razones, entre ellas esta elaspecto practico del calculo mismo, ası como el de lograr una cabal com-prension del calculo de la prima por parte del asegurado y del resto de laspersonas involucradas en los procesos tecnicos, administrativos y legales delseguro.
Consistencia
Si un riesgo se incrementa en una constante, entonces la prima debe reflejarese cambio incrementandose en la misma cantidad, es decir, si c ¡ 0 es unaconstante, entonces
ppS cq ppSq c.
Aditividad
La prima de un portafolio consistente en dos riesgos independientes debeser la suma de las primas individuales, es decir,
ppS1 S2q ppS1q ppS2q,
cuando S1 y S2 son dos riesgos independientes. Es claro que cuando secumple esta propiedad, el intentar combinar o separar los riesgos no resultaen ninguna ventaja o provecho ni para el asegurado ni para el asegurador.
Invarianza de escala
Si a ¡ 0 es una constante, entonces
ppaSq a ppSq,
es decir, si la cuantificacion del riesgo S cambia de escala y se consideraahora el riesgo aS, la prima para este nuevo riesgo debe ser a ppSq, estoequivale a la prima original modificada con la misma escala.

3.2. Principios generales 71
Cota inferior
La prima debe tener siempre como cota inferior la prima pura de riesgo, esdecir,
p ¥ EpSq.
Sin embargo, en algunas situaciones es necesario suponer que las primasdeben tener siempre un recargo positivo y se considera la condicion masrestrictiva p ¡ EpSq. A menos que se establezca lo contrario, la propiedadde cota inferior se entendera en el sentido p ¥ EpSq, la cual es mas facil deverificar en los metodos de calculos de primas que estudiaremos.
Cota superior
Si un riesgo esta acotado superiormente, entonces la prima para cubrir esteriesgo tambien debe tener la misma cota superior, es decir, si S ¤ M paraalguna constante M ¡ 0, entonces
ppSq ¤M.
3.2. Principios generales
Recordemos que la prima pura de riesgo esta dada por p EpSq. Esta esla prima destinada a solventar exclusivamente la reclamacion del riesgo, sinembargo veremos a continuacion la posible situacion catastrofica que podrıapresentarse cuando se toma p EpSq. Considere un portafolio homogeneode n polizas de seguro de un mismo riesgo y validas por un tiempo deter-minado. Suponga que se cobra una misma prima p por cada poliza y queSj representa el monto de las reclamaciones efectuadas por la poliza j, lascuales se presuponen independientes y con identica distribucion. Si u es elcapital inicial de la aseguradora, entonces el capital de la misma al terminode la vigencia de las polizas es
Xn u np
n
j1
Sj
u
n
j1
pp Sjq.

72 3. Principios para el calculo de primas
Tenemos entonces las siguientes dos situaciones:
a) Cuando p EpSq, al tomar esperanza en la ecuacion anterior se ob-tiene EpXnq un ppEpSqq u. Es decir, en promedio la companıaaseguradora permanece con su capital inicial, sin embargo puede de-mostrarse que cuando nÑ8, casi seguramente,
lım supnÑ8
Xn lım infnÑ8
Xn 8.
Esto quiere decir que el capital Xn puede oscilar y tomar valoresgrandes, tanto negativa como positivamente. Este resultado es partedel Teorema 6.3.1 del texto de Rolski et al [32] y su demostracion haceuso de algunos elementos de caminatas aleatorias.
b) Cuando p EpSq, por la ley de los grandes numeros,
lımnÑ8
1
nXn lım
nÑ8
1
n
u
n
j1
pp Sjq
lımnÑ8
1
n
n
j1
pp Sjq
Epp Sq
p EpSq.
Ası, para que este lımite sea el indicado la variable Xn tiene quediverger a infinito o menos infinito dependiendo del signo de pEpSq.Por lo tanto Xn tiene el siguiente comportamiento lımite en el sentidocasi seguro,
lımnÑ8
Xn
#
8 si p ¡ EpSq,
8 si p EpSq.
En vista de estos resultados, es natural y deseable suponer p ¡ EpSq. Estacondicion se conoce con el nombre de condicion de ganancia neta (net profitcondition) y debe prevalecer en cualquier metodo para calcular p.
En general no existe un mecanismo de calculo para la prima que sea el mejorpues existen varias condiciones que afectan la forma de calcular primas, en-tre ellas, las restricciones legales y financieras, las condiciones del asegurado,

3.2. Principios generales 73
las condiciones de la propia aseguradora y de las otras aseguradoras, ası co-mo las condiciones del mercado del seguro. Todos estos son factores quedeterminan, directa o indirectamente, el valor de una prima para cubrir unriesgo particular en una situacion real. Estudiaremos a continuacion algunasformas particulares para el calculo de primas. A estos procedimientos se lesdenomina con el termino de prinicipios.
Principio del valor esperado
Este principio es uno de los mas sencillos y establece que la prima puedecalcularse de la siguiente forma:
p p1 θqEpSq,
en donde θ ¡ 0 es una constante llamada factor de recargo (safety loading).Es decir, se trata de la reclamacion promedio mas un porcentaje de esta.En el factor de recargo se encuentran inmersos los costos administrativos ycomerciales del seguro, ası como los margenes de utilidad de la aseguradora.La forma simple en la se expresa este principio es una de sus caracterısti-cas principales, sin embargo puede observarse que una desventaja de estaformula es que asigna la misma prima a dos riesgos con distinta distribu-cion pero con media comun, y no toma en cuenta otro aspectos, por ejemplo,si las varianzas de los riesgos fueran distintas, entonces las primas tal vezdeberıan ser distintas.
Principio de la varianza
Este principio hace uso de la esperanza y la varianza del riesgo. En estecaso el factor de recargo θ ¡ 0 se aplica sobre el valor de la varianza de lasiguiente forma:
p EpSq θVarpSq.
Principio de la desviacion estandar
Sea nuevamente θ ¡ 0 una constante. En este principio el factor de recargose aplica sobre la desviacion estandar del riesgo como indica la formula queaparece abajo. A diferencia del principio de la varianza, en este caso lasunidades de medicion del riesgo y de la prima coinciden. Y es evidente que

74 3. Principios para el calculo de primas
la prima calculada mediante este principio produce una prima menor o iguala aquella calculada mediante el principio de la varianza.
p EpSq θa
VarpSq.
Principio de utilidad cero
Este principio hace uso de una funcion de utilidad, esto es, una funcion vpxq
definida sobre r0,8q o un subconjunto de este intervalo y con valores en R,que cumple las propiedades que se mencionan a continuacion, y cuya graficaen terminos generales se muestra en la Figura 3.1.
a) Es estrictamente creciente.
b) Es concava.
Una funcion con estas caracterısticas puede usarse para modelar el valor outilidad que una persona o institucion asocia a un bien monetario o ma-terial. En el apendice el lector encontrara un exposicion breve sobre algu-nas propiedades de este tipo de funciones. Suponiendo diferenciabilidad, laprimera condicion se escribe v1pxq ¡ 0, y la segunda condicion significa quev2pxq ¤ 0. A veces se anade la condicion vp0q 0 pues toda funcion deutilidad (definida en x 0) puede modificarse de tal forma que cumpla esacondicion sin afectar el resultado en los procesos de decision que se llevan acabo usando estas funciones. La nueva funcion de utilidad serıa vpxq vp0q.Vease la seccion sobre este tema en el apendice.
x
vpxq
Figura 3.1: Funcion concava.
El principio de utilidad cero establece que la prima para cubrir un ciertoriesgo S es aquel numero p que satisface la ecuacion
vpuq Ervpu p Sqs, (3.1)

3.2. Principios generales 75
en donde u es el capital inicial de la aseguradora. Es decir, la utilidad querepresenta para la aseguradora el capital inicial u debe ser identica a la utili-dad esperada al cubrir el riesgo. Ası, el calculo de p esta dado implıcitamentepor la ecuacion (3.1) y para que la prima este bien definida supondremos elcaso cuando esta ecuacion tiene una unica solucion p. Debemos mencionar,sin embargo, que no es sencillo resolver de manera exacta ecuaciones de laforma (3.1), pero pueden usarse metodos numericos para conocer p de ma-nera aproximada. El siguiente ejemplo es un caso muy particular y atıpicoen donde se puede calcular con facilidad la solucion p de (3.1).
Ejemplo 3.1 Considere la funcion de utilidad upxq 1 eαx, con α ¡ 0.La prima se calcula como aquel valor de p que es solucion de la ecuacion
1 eαu Er1 eαpupSq
s.
Despues de algunos calculos sencillos, de la identidad anterior se obtiene laexpresion
p 1
αlnMSpαq. (3.2)
Se presentan a continuacion algunos ejemplos de funciones de utilidad.
a) Funcion de utilidad exponencial.
vpxq 1 eαx, α ¡ 0.
b) Funcion de utilidad cuadratica.
vpxq x αx2, α ¡ 0, para 0 ¤ x ¤ 1p2αq.
c) Funcion de utilidad logarıtmica.
vpxq α lnx, α ¡ 0.
d) Funcion de utilidad de potencia fraccional.
vpxq xα, 0 α ¤ 1.
Demostraremos a continuacion que el principio de utilidad cero produceprimas que cumplen la condicion p ¥ EpSq. Por la desigualdad de Jensenen el caso de funciones concavas,
vpuq Ervpu p Sqs
¤ vpEpu p Sqq
vpu p EpSqq.

76 3. Principios para el calculo de primas
Como v es una funcion estrictamente creciente, es uno a uno, y por lotanto su inversa v1 existe y tambien es estrictamente creciente. Al aplicarentonces la inversa se preserva la desigualdad anterior y se obtiene p ¥ EpSq.La igualdad se logra, por ejemplo, cuando S es constante.
Principio del valor medio
Este principio hace uso de una funcion de valor, esto es, una funcion vpxq
que cumple las propiedades que aparecen abajo y cuya grafica general semuestra en la Figura 3.2.
a) vp0q 0.
b) Es estrictamente creciente.
c) Es estrictamente convexa.
x
vpxq
Figura 3.2: Funcion convexa.
El principio del valor medio establece que la prima p debe calcularse a partirde la igualdad
vppq ErvpSqs. (3.3)
Esta identidad significa que la companıa aseguradora asigna el mismo valora la prima que al promedio del valor de la reclamacion y por lo tanto esindiferente a cualquiera de las dos situaciones. Como la funcion vpxq esestrictamente creciente, es uno a uno, su inversa por lo tanto existe y estambien estrictamente creciente. De hecho, la inversa de cualquier funcionde utilidad que se anula en cero es un ejemplo de una funcion de valor. Ası,la prima mediante este principio se puede escribir de la siguiente forma:
p v1pEpvpSqqq.

3.2. Principios generales 77
Por la desigualdad de Jensen para la funcion convexa v, EpvpSqq ¥ vpEpSqq,o bien por la misma desigualdad para la funcion concava v1, v1
pEpXqq ¥
Epv1pXqq. Ambos caminos llevan a la desigualdad
p ¥ EpSq.
Ejemplo 3.2 Considere la funcion de valor vpxq eαx 1, con α ¡ 0.Bajo este principio, la igualdad (3.3) se escribe eαp 1 EpeαS 1q, loque lleva a la siguiente solucion, que es identica a (3.2),
p 1
αlnMSpαq. (3.4)
Principio exponencial
Este es el principio de utilidad cero aplicado a la funcion de utilidad vpxq
1 eαx, con α ¡ 0. Y coincide tambien con el principio del valor medioaplicado a la funcion de valor vpxq eαx 1, con α ¡ 0. Hemos visto quela prima calculada bajo estos principios es
p 1
αlnMSpαq.
Observe que en este caso la prima no depende del capital inicial u. Puedeverificarse directamente que p ¥ EpSq, lo cual hemos demostrado antes demanera general.
Principio del porcentaje
Sea ǫ ¡ 0 una constante. El principio del porcentaje sugiere que la primap puede calcularse mediante la expresion que aparece abajo. El significadogeometrico de esta formula se muestra en la Figura 3.3.
p ınf tx ¡ 0 : P pS ¡ xq ¤ ǫu.
De esta forma la probabilidad de que el riesgo exceda el monto de la pri-ma debe ser pequeno o ajustable mediante el parametro ǫ. A este princi-pio tambien se le conoce tambien como principio de perdida maxima. Porejemplo, si S sigue una distribucion exponencial de parametro λ, entoncesP pS ¡ xq eλx. Y por lo tanto p es aquel valor numerico tal que eλp
ǫ,

78 3. Principios para el calculo de primas
fpxq
xp
Figura 3.3
es decir, p
1
λln ǫ. Ası, para este ejemplo particular, se cumple la condi-
cion p ¥ EpSq si, y solo si, 1
λln ǫ ¥ 1
λ, es decir, ǫ ¤ e1. Esto muestra
que el principio del porcentaje no produce en general primas que cumplenla condicion de ganancia neta.
Principio de Esscher
Antes de establecer este principio es necesario definir primero la transfor-mada de Esscher de una distribucion de probabilidad para la cual existe lafuncion generadora de momentos.
Transformada de Esscher. Sea S un riesgo con funcion de densidad fpxq,funcion de distribucion F pxq y para la cual existe la funcion generadorade momentos MSphq, para algunos valores de h ¥ 0. La transformada deEsscher con parametro h de fpxq es la funcion
x ÞÑ gpxq 1
MSphqehxfpxq. (3.5)
Es inmediato comprobar que esta funcion es efectivamente de densidad.Por ejemplo, puede demostrarse que la transformada de Esscher de la dis-tribucion exponencial es nuevamente la distribucion exponencial pero conparametro distinto (ejercicio 87). Cuando el parametro h es cero se obtienela funcion de densidad original. La definicion de transformada de Esscherpuede definirse de manera analoga para variables aleatorias discretas.

3.2. Principios generales 79
El principio de Esscher establece que la prima para cubrir el riesgo S es laesperanza de esta nueva funcion de densidad, es decir,
p
1
MSphq
»
8
0
x ehxfpxq dx
EpSehSq
EpehSq.
Denotemos por pphq a esta funcion. Es claro que pp0q EpSq y puededemostrarse que pphq es una funcion creciente de h, vease el ejercicio 90. Porlo tanto, pphq ¥ pp0q EpSq. Esto demuestra que se cumple la condicion deganancia neta y que mientras mayor es el parametro h mayor es la prima.Habiendo definido la forma de calcular primas bajo este principio, vamosa hacer algunas observaciones acerca de la funcion de densidad (3.5), lacual es la funcion de densidad original ponderada por la funcion crecientex ÞÑ ehxMSphq. La correspondiente funcion de distribucion de (3.5) es
Gpxq 1
MSphq
» x
0
ehyfpyq dy.
A esta funcion tambien se le llama la transformada de Esscher de la funcionde distribucion F pxq. Sea S una variable aleatoria asociada a esta funcion dedistribucion. Algunos calculos sencillos muestran que la funcion generadorade momentos de esta nueva variable aleatoria esta dada por
MSptq MSpt hq
MSphq.
Principio del riesgo ajustado
Este principio, ası como el de Esscher, esta basado en una transformacionde la distribucion del riesgo. Para un riesgo S con funcion de distribucionF pxq se define una nueva funcion de distribucion de la siguiente forma
Gpxq 1 p1 F pxqq1ρ,
en donde ρ ¥ 1 es un parametro conocido como el ındice del riesgo. Puestoque 1 F pxq es un numero entre 0 y 1, y ρ ¥ 1, se cumple que
1Gpxq p1 F pxqq1ρ
¥ 1 F pxq. (3.6)

80 3. Principios para el calculo de primas
Esto significa que la cola de la distribucion del riesgo esta siendo sobreestimada por la cola de la nueva distribucion. Esta sobre estimacion esusada para definir la prima para cubrir S. En la Figura 3.4 se muestra elorden que guardan las funciones Gpxq y F pxq.
x
1F pxq
Gpxq
Figura 3.4
Ası, la prima por el principio del riesgo ajustado para el riesgo S se definecomo la esperanza de la nueva funcion de distribucion, es decir,
p
»
8
0
p1Gpxqq dx
»
8
0
p1 F pxqq1ρ dx.
Se verifica entonces la condicion p ¥ EpSq, pues
p
»
8
0
p1 F pxqq1ρ dx ¥
»
8
0
p1 F pxqq dx EpSq.
Puesto que hemos revisado algunos metodos particulares para calcular pri-mas y que contamos con una lista de propiedades deseables que debencumplir los metodos, surge el problema de determinar si se cumplen o nose cumplen las propiedades para cada uno de los metodos enunciados. Taltarea es el contenido del ejercicio 94. Algunas de estas comprobaciones soninmediatas, algunas otras requieren un poco mas de trabajo. En la tabla quehemos colocado en este ejercicio se ha omitido la propiedad de simplicidad,pues tal caracterıstica es subjetiva.
3.3. Primas y funciones de utilidad
Hemos mencionado que el principio de utilidad cero establece que la primaque una aseguradora esta dispuesta a cobrar a un asegurado para cubrir un

3.3. Primas y funciones de utilidad 81
cierto riesgo S es aquel numero p que satisface la ecuacion
v1pu1q Erv1pu1 p Sqs, (3.7)
en donde u1 es el capital inicial de la aseguradora y v1pxq es una funcionde utilidad . Denotemos por p a esta prima puesto que en realidad la ase-guradora estarıa contenta en cobrar una prima p que sea mayor o igual ap, es decir, desde el punto de vista de la aseguradora y bajo el criterio deutilidad cero, la prima p es la mınima prima a cobrar, y por lo tanto p ¥ p.
En contraparte, un asegurado con capital inicial o riqueza u2 y con funcionde utilidad v2pxq, considera que puede aceptar contratar un seguro paracubrirse contra el riesgo S cuando, de acuerdo al principio de utilidad cero,la prima p esta dada por
v2pu2 pq Erv2pu2 Sqs. (3.8)
El posible valor de p solucion de esta ecuacion representa el punto de balance(misma utilidad) para el asegurado entre la decision de contratar el seguro ono contratarlo. Denotemos ahora por p a la solucion de (3.8). Nuevamenteese valor es en realidad la prima maxima que el asegurado esta dispuesto apagar para cubrirse contra S, pues es claro que una prima menor o igual atal valor es conveniente para el. De esta manera el principio de utilidad ceroestablece las condiciones de ambas partes para tomar un decision respectoa firmar o no firmar el contrato del seguro. Es claro que habra un acuerdoentre ambas partes si existe un valor de p tal que
p ¤ p ¤ p.
En tal caso se dice que el riesgo es asegurable bajo el criterio y condicionesmencionados. La situacion se ilustra en la Figura 3.5.
Ejemplo 3.3 Suponga que una companıa aseguradora con capital inicialu1 ¡ 0 decide asegurar un riesgo S y el calculo de la prima se determina deacuerdo al principio de utilidad cero usando la funcion de utilidad v1pxq
1 eα1x, con α1 ¡ 0. De este modo, la prima mınima que la aseguradoraesta dispuesta a cobrar es p dada por la solucion de la ecuacion
v1pu1q Erv1pu1 p Sqs.

82 3. Principios para el calculo de primas
p Prima de la aseguradora
pPrima del asegurado
Figura 3.5
Resolviendo esta ecuacion como se ha hecho antes se encuentra que p
1
α1lnMSpα1q. Por otro lado, un asegurado con capital inicial u2 esta dis-
puesto a pagar una prima maxima p para asegurarse contra este riesgo,determinada por la ecuacion v2pu2 pq Erv2pu2 Sqs, en donde v2pxq
es la funcion de utilidad particular v2pxq 1 eα2x, con α2 ¡ 0. La solu-cion de esta ecuacion es p
1
α2lnMSpα2q. Ası, el riesgo mencionado es
asegurable bajo las condiciones mencionadas si, y solo si, las constantes α1
y α2 satisfacen la relacion
1
α1
lnMSpα1q ¤
1
α2
lnMSpα2q.
Comentarios y referencias
Uno de los problemas fundamentales de las companıas aseguradoras paraoperar un seguro es determinar la forma de calcular la prima a cobrar paraasegurar un riesgo. En este capıtulo hemos estudiado los primeros elemen-tos para resolver este problema desde el punto de vista matematico y con-siderando exclusivamente la naturaleza estocastica del riesgo. Ası, suponien-do que hemos adoptado un modelo matematico para representar un riesgoproveniente de una cartera de asegurados y suponiendo que podemos calcu-lar algunas de sus caracterısticas, en este capıtulo hemos visto que no hayuna forma unica de calcular la prima correspondiente, pues en efecto, hemosmostrado varios metodos del calculo de primas.

3.4. Ejercicios 83
3.4. Ejercicios
Desigualdad de Jensen
74. Convexidad y desigualdad de Jensen. Una funcion u : pa, bq Ñ R
es convexa si para cualesquiera numeros x y en pa, bq, y paracualquier t P r0, 1s se cumple la desigualdad
uptx p1 tqyq ¤ tupxq p1 tqupyq.
Geometricamente esta desigualdad significa que la recta que unelos puntos px, upxqq y py, upyqq se encuentra por arriba de la fun-cion en el intervalo rx, ys. Cuando u es dos veces diferenciable, lacondicion de convexidad se escribe u2pxq ¡ 0. La desigualdad deJensen establece que si u es una funcion convexa y X es una va-riable aleatoria tal que tanto X como upXq tienen esperanza finita,entonces
upEpXqq ¤ EpupXqq.
Demuestre esta desigualdad en el caso cuando u es dos veces dife-renciable siguiendo los siguientes pasos:
a) Escriba la serie de Taylor de la funcion u alrededor de un puntox0 hasta la segunda derivada.
b) Use la condicion u2pxq ¡ 0 para concluir que upxq ¥ upx0q
u1px0qpx x0q.
c) Sustituya x por X, x0 por EpXq y despues tome esperanza enambos lados.
Funciones de utilidad y el principio de utilidad cero
75. Sean a ¡ 0 y α ¡ 0 constantes. Demuestre que la funcion vpxq
ap1 eαxq definida para x ¥ 0, es una funcion de utilidad y que
usada bajo el principio de utilidad cero determina que la prima paracubrir un riesgo S debe ser p 1
αlnMSpαq.
76. Suponga que una persona con capital u tiene dos opciones de in-version, las cuales le reportan ganancias o perdidas dadas por las

84 3. Principios para el calculo de primas
variables aleatorias I1 e I2. Es decir, al cabo de cada una de lasinversiones su capital sera u I1 o u I2. Suponga que la personadecide tomar la inversion que le otorga una utilidad esperada ma-yor, en donde su funcion de utilidad es exponencial. Demuestre quesu decision es independiente del capital inicial u.
Funciones de valor y el principio del valor medio
77. Suponga que un riesgo S tiene distribucion exppλq. Use el principiodel valor medio para calcular la prima para cubrir este riesgo usandola funcion de valor vpxq x2.
Principio del valor esperado
78. Suponga que se tiene un portafolio de 350 polizas de seguros contrarobo a casahabitacion con validez por un ano, como se muestra enla siguiente tabla:
Probabilidad Reclamacionde siniestro unifp0, 10s unifp10, 20s
0.01 100 60
0.02 150 40
Esto quiere decir, por ejemplo, que se tienen 100 asegurados cuyaprobabilidad de reclamacion es 0.01 y cuyo monto de reclamacion sedistribuye unifp0, 10s. Suponga que nos interesa modelar el agregadode reclamaciones mediante la variable Si usando modelo individual,pero tambien con la variable Sc usando el modelo colectivo Poisson.
a) Encuentre la media y la varianza de las variables Si y Sc.
b) Suponga que para el calculo de las primas se usa el princi-pio del valor esperado. Calcule el factor de recargo θi y θc,correspondiente a cada modelo, de tal forma que con proba-bilidad de 0.95 las primas sean suficientes para hacer frente alas reclamaciones.

3.4. Ejercicios 85
c) Suponga que las probabilidades de reclamacion se duplican.Encuentre nuevamente los factores de recargo θi y θc para quecon probabilidad de 0.95 las primas sean suficientes para hacerfrente a las reclamaciones.
Principio de la varianza
79. Usando el principio de la varianza calcule la prima p para cubrir unriesgo S con distribucion unifp0, 1q, y encuentre el valor del factorθ tal que P pS ¡ pq 0.1 .
Principio exponencial
80. Use la desigualdad de Jensen para demostrar directamente que laprima calculada mediante el principio exponencial cumple la desi-gualdad p ¥ EpSq.
Principio del porcentaje
81. Usando el principio del porcentaje, calcule la prima para cubrir unriesgo S con distribucion exppλq.
82. Mediante el principio del porcentaje calcule la prima para cubrirun riesgo con distribucion Paretopa, bq.
83. Mediante el principio del porcentaje calcule la prima para cubrirun riesgo con distribucion Weibullpr, αq.
84. Considere un riesgo S con funcion de densidad como aparece abajo.Calcule la prima para cubrir S mediante el principio del porcentaje.
fpxq
?
2?
πex2
2, x ¡ 0.
Transformada de Esscher
85. Calcule la transformada de Esscher de parametro h ¡ 0 de la dis-tribucion:

86 3. Principios para el calculo de primas
a) geoppq.
b) Poissonpλq.
c) unifpa, bq.
d) Npµ, σ2q.
86. Doble transformada. Sea S un riesgo con funcion de densidad fpxq
y funcion generadora de momentos finita.
a) Demuestre que la doble transformada de Esscher con parame-tros h1 y h2 de la funcion fpxq es
gpxq 1
MSph1 h2qeph1h2qxfpxq.
b) Compruebe que la funcion generadora de momentos de la dobletransformada es
Mptq MSpt h1 h2q
MSph1 h2q.
Principio de Esscher
87. Sea S un riesgo con distribucion exppλq.
a) Demuestre que la transformada de Esscher de parametro h esla distribucion exppλ hq, para 0 ¤ h λ.
b) Encuentre la prima mediante el principio de Esscher.
c) Verifique la condicion de ganancia neta.
88. Suponga que la reclamacion de un cierto riesgo S tiene distribucionuniforme en el intervalo p0, 1q.
a) Calcule la transformada de Esscher de parametro h 1 de estadistribucion. Grafique y compare las dos funciones de densi-dad.
b) Calcule la prima para cubrir este riesgo usando el principio deEsscher de parametro h 1.
c) Calcule la probabilidad de que la prima sea suficiente paracubrir una reclamacion del riesgo.

3.4. Ejercicios 87
89. Sea S un riesgo con distribucion gamapγ, λq.
a) Demuestre que la transformada de Esscher de parametro h esla distribucion gamapγ, λ hq, para 0 ¤ h λ.
b) Encuentre la prima mediante el principio de Esscher.
c) Verifique la condicion de ganancia neta.
90. Condicion de ganancia neta. Sea pphq EpSehSqEpehSq la primapara cubrir un riesgo S calculada mediante el principio de Esscher.Demuestre que la funcion diferenciable pphq es creciente. En conse-cuencia, pphq ¥ pp0q EpSq.Sugerencia: la desigualdad de Cauchy-Schwarz establece que parados variables aleatorias con segundo momento finito se cumple queE2pXY q ¤ EpX2
qEpY 2q.
Principio del riesgo ajustado
91. Sea S un riesgo con distribucion exppλq.
a) Demuestre que la transformada del principio del riesgo ajus-tado de parametro ρ es la distribucion exppλρq.
b) Encuentre la prima mediante el principio de riesgo ajustadopara cubrir el riesgo S.
c) Verifique la condicion de ganancia neta para ρ ¡ 1.
92. Sea S un riesgo con distribucion Paretopa, bq.
a) Demuestre que la transformada del principio del riesgo ajus-tado de parametro ρ es la distribucion Paretopaρ, bq.
b) Encuentre la prima mediante el principio de riesgo ajustadopara cubrir el riesgo S.
c) Verifique la condicion de ganancia neta para ρ ¡ 1.
93. Calcule la prima para cubrir un riesgo S con distribucion unifp0, 1qusando el principio del riesgo ajustado con ındice de riesgo ρ yverifique la condicion de ganancia neta.

88 3. Principios para el calculo de primas
Propiedades
94. Complete la siguiente tabla determinando si cada uno de los princi-pios mencionados para calcular primas cumple la propiedad corres-pondiente. En cada caso demuestre su afirmacion o proporcione uncontraejemplo. Para simplificar las cosas considere que la propiedadde cota inferior se refiere a la desigualdad no estricta p ¥ EpSq.
Consis- Aditi- Inva- Cota Cotatencia vidad rianza inferior superior
Valor esperadoVarianzaDesv. estandarUtilidad ceroValor medioExponencialPorcentajeEsscherRiesgo ajustado
Primas y funciones de utilidad
95. Calcule la prima maxima que un asegurado esta dispuesto a pagarpara cubrirse contra un riesgo S que puede tomar los valores 0 y100, con identica probabilidad 12. Suponga que como funcion deutilidad se toma la funcion identidad.
96. Considere un riesgo S con distribucion Poissonpλq con λ 10.Sea v1pxq 1 αeαx con α 12 la funcion de utilidad de laaseguradora. Sea v2pxq x1 la funcion de utilidad del solicitantedel seguro. Determine si el riesgo S es asegurable. Observe que eneste caso no es necesario conocer el capital inicial del asegurado nidel asegurador.
97. Sea vpxq una funcion de utilidad, y sean a y b dos constantes cona ¡ 0. Demuestre que a vpxq b es una funcion de utilidad.
98. Suponiendo diferenciabilidad, demuestre que la composicion de dosfunciones de utilidad es una funcion de utilidad.

3.4. Ejercicios 89
99. Aversion al riesgo. Suponga que una persona con capital inicialu tiene la posibilidad de participar en un juego justo en el querecibira una cantidad positiva x con probabilidad 12, o perdera di-cha cantidad con probabilidad 12. En caso de no desear participaren este juego, el capital de la persona no se modifica y permanececon el valor u. Suponga que la persona toma la decision de par-ticipar o no participar en el juego usando el criterio de la utilidadesperada maxima, es decir, tomara aquella decision que le reditueuna utilidad promedio maxima. Demuestre que si la funcion de uti-lidad usada es estrictamente concava, es decir, v2pxq 0, entoncesla decision sera siempre no participar en el juego, a pesar de queeste es justo. Esto ilustra la interpretacion de que las funciones deutilidad estrictamente concavas representan la utilidad de personascon aversion al riesgo.
100. Coeficiente de aversion al riesgo. Se define el coeficiente de aver-sion al riesgo de una funcion de utilidad vpxq como la funcionv2pxqv1pxq ¥ 0. Calcule este coeficiente en el caso de la funcion deutilidad exponencial, cuadratica, logarıtmica y potencia fraccional.


Capıtulo 4
Reaseguro
En este capıtulo estudiaremos algunas ideas simples y generales del rease-guro. El reaseguro se presenta cuando una aseguradora firma un contratopara cubrir ciertos riesgos con otra companıa aseguradora llamada rease-guradora. De esta manera ambas aseguradoras adquieren la obligacion desolventar las posibles reclamaciones del riesgo en cuestion y nos encontramosnuevamente en el esquema general de un asegurado y una aseguradora, endonde debe existir un acuerdo entre ambas partes acerca de las condicionesdel contrato, las caracterısticas del riesgo, las condiciones para el pago dela suma asegurada y, por supuesto, el calculo de la prima correspondiente.Desde el punto de vista de la aseguradora, el reaseguro le ayuda a evitar posi-bles fuertes montos en las reclamaciones, aunque naturalmente disminuyensus ingresos por primas pues tiene que compartir estas con la reaseguradora.
Consideremos entonces un riesgo S y denotemos por SA la parte del riesgoasumido por el asegurador y sea SR la parte asumida por el reasegurador.Las letras A y R indican los terminos Asegurador y Reasegurador, respec-tivamente. Debe entonces cumplirse la igualdad
S SA SR.
Los distintos tipos de reaseguro corresponden a las distintas formas en lasque esta descomposicion puede llevarse a cabo y tales descomposicionespueden ser deterministas o aleatorias. El objetivo ahora es estudiar lascaracterısticas probabilısticas de las variables aleatorias SA y SR, y si se
91

92 4. Reaseguro
cumplen las condiciones adecuadas, pueden aplicarse los resultados encon-trados antes para lograr dicho objetivo. El reaseguro puede tomar por lomenos dos perspectivas: actuar sobre las reclamaciones individuales o sobreel total del riesgo.
Reaseguro
Reclamaciones
individuales
Total del
riesgo
Figura 4.1
En ambos esquemas de reaseguro se aplica una funcion continua h del in-tervalo r0,8q en sı mismo tal que:
a) hp0q 0.
b) hpxq ¤ x.
Las dos funciones de este tipo que consideraremos son hpxq ax, paraa P p0, 1q, y hpxq mıntx,Mu, para alguna constante M ¡ 0. Graficamenteestas funciones se muestran a la Figura 4.2.
x
hpxq ax
M
Mx
hpxq mıntx,Mu
Figura 4.2
Bajo el esquema de reaseguro, la aseguradora afronta unicamente el ries-go resultante de aplicar la funcion h al riesgo original o a cada una de sus

4.1. Reaseguro proporcional 93
reclamaciones. Cuando se utiliza la primera de las funciones h mencionadas,el reaseguro se llama proporcional y en el segundo caso se le llama no pro-porcional. Estudiaremos a continuacion estos dos tipos de reaseguro aunquedebemos mencionar que a pesar de que los nombres de estos dos esquemasde reaseguro podrıan sugerir que son los unicos, esto no es ası, pues existenotras formas en las que los riesgos SA y SR pueden determinarse.
4.1. Reaseguro proporcional
Suponga que una companıa aseguradora reasegura un riesgo de la formaS
°Nj1
Yj . En el reaseguro proporcional se usa la funcion hpxq ax,para algun valor de la constante a en el intervalo p0, 1q. Usando la lineali-dad de esta funcion, es claro que es equivalente aplicar la funcion a cadareclamacion por separado o al riesgo completo. Dada una reclamacion Y ,la aseguradora hace frente a una proporcion de esta, aY , y la reasegurado-ra cubre el porcentaje restante, p1 aqY . El riesgo total asumido por laaseguradora es aS, y la reaseguradora cubre p1 aqS, es decir,
SA aS
N
j1
a Yj ,
SR p1 aqS
N
j1
p1 aqYj .
En este caso, las caracterısticas probabilısticas de SA y de SR se encuentranfacilmente de las de S, pues no es difıcil comprobar los siguientes resultadospara SA con analogos resultados para SR.
a) FSApxq FSpxaq.
b) fSApxq 1
afSpxaq, cuando S es absolutamente continua.
c) MSAprq MSparq.
d) EpSAq aEpSq ¤ EpSq.
e) VarpSAq a2VarpSq ¤ VarpSq.

94 4. Reaseguro
Probabilidad de insolvencia
Comprobaremos a continuacion que el reaseguro proporcional es convenientepara la aseguradora en el sentido de que la probabilidad de insolvencia bajoeste tipo de reaseguro es menor o igual a la probabilidad de insolvenciacuando no hay reaseguro. Suponga que una companıa aseguradora adquiereun riesgo S durante un cierto periodo y por el cual cobra una prima p.Suponga que esta aseguradora tiene un capital inicial u. La probabilidad deque la companıa aseguradora no pueda solventar el riesgo es
P pS ¡ p uq.
Tal probabilidad se muestra graficamente en la Figura 4.3. Ahora supon-ga que la companıa decide reasegurarse mediante el esquema de reaseguroproporcional. Suponga ademas que el asegurador retiene una parte de laprima original p dada por ap, con 0 a 1, y el reasegurador obtiene lacantidad p1 aqp al aceptar reasegurar este riesgo. La probabilidad de quela aseguradora no pueda solventar el nuevo riesgo bajo este esquema es
P paS ¡ ap uq P pS ¡ pu
aq
¤ P pS ¡ p uq.
fSpxq
xp u p u
a
Figura 4.3
De esta forma hemos comprobado que la probabilidad de insolvencia bajoel esquema de reaseguro proporcional es menor o igual a la probabilidad delmismo evento cuando no hay reaseguro. La ventaja para la aseguradora alcontratar el reaseguro es que la incertidumbre disminuye pero sus ganancias

4.2. Reaseguro no proporcional 95
tambien disminuyen al ceder un porcentaje de sus ingresos por primas. Estapropiedad de disminucion de insolvencia mediante el reaseguro es un tantomas difıcil de verificar en otros tipos de reaseguro y dependera, en general,del calculo de la prima para el reaseguro.
4.2. Reaseguro no proporcional
En el reaseguro no proporcional se toma la funcion hpxq mıntx,Mu paraalguna constante M ¡ 0 llamada nivel de retencion. Distinguiremos doscasos: cuando se aplica esta funcion a cada reclamacion y cuando se aplicasobre el total del riesgo.
Reaseguro en el riesgo completo (stop loss)
En este caso se aplica la funcion hpxq mıntx,Mu sobre la totalidad delriesgo para obtener la parte que cubre la aseguradora y el riesgo excedentelo cubre la reaseguradora. De esta manera cada una de las aseguradorascubren los riesgos:
SA mın tS,Mu,
SR max t0, S Mu.
Tras un analisis puntual de estas funciones puede verificarse la identidadS SA
SR, la cual no es evidente a primera vista. Ası, mediante estemecanismo la aseguradora tiene la certidumbre de que cubrira un montomaximo de M para el riesgo S. Es por ello que a este tipo de reaseguro sele llama reaseguro de perdida maxima (stop loss).
Tanto la variable SA como SR son, en general, variables aleatorias mixtas,es decir, no son discretas ni continuas. Por ejemplo, la variable SA tiene unamasa de probabilidad en el punto M de valor P pS ¥Mq, es decir, P pSA
Mq P pS ¥ Mq. Puede demostrarse que su funcion de distribucion tomala expresion
FSApxq
"
FSpxq si x M,
1 si x ¥M,
la cual se muestra en la Figura 4.4 (a) en el caso cuando FSpxq es continua.Debido a su condicion de variable aleatoria mixta, la funcion de densidad

96 4. Reaseguro
del riesgo SA no puede expresarse como una funcion tradicional sino quees necesario hacer uso de las funciones generalizadas si se desea escribirtal funcion. En estos casos preferiremos trabajar unicamente con la funcionde distribucion. Suponiendo que S es absolutamente continua, el n-esimomomento de SA puede expresarse de la siguiente forma:
ErpSAq
ns
» M
0
xnfSpxq dxMnP pS ¥Mq.
1
M
bc
b
x
FSApxq
1
bc
b
x
FSRpxq
(a) (b)
Figura 4.4
Por su parte, la variable SR tiene una masa de probabilidad en el punto 0de valor FSpMq, es decir, P pSR
0q FSpMq y su funcion de distribuciones:
FSRpxq
"
0 si x 0,FSpM xq si x ¥ 0,
la cual se muestra en la Figura 4.4 (b) en el caso cuando FSpxq es continua.Nuevamente, no es posible escribir la funcion de densidad de SR en terminostradicionales y matematicamente es preferible trabajar con la funcion dedistribucion. En el caso absolutamente continuo el n-esimo momento de SR
adquiere la siguiente expresion:
ErpSRq
ns
»
8
0
xnfSpM xq dx.
Es interesante notar que la variable SR puede tomar el valor 0 con proba-bilidad positiva y tal situacion corresponderıa a una reclamacion nula para

4.2. Reaseguro no proporcional 97
la reaseguradora. No es difıcil comprobar que la funcion de distribucion deSR condicionada a tomar valores positivos es, para x ¡ 0,
FSR|SR
¡0pxq P pSR¤ x |SR
¡ 0q FSpM xq FSpMq
1 FSpMq
.
En el caso absolutamente continuo, diferenciando la identidad anterior seencuentra la funcion de densidad correspondiente.
fSR|SR
¡0pxq fSpM xq
1 FSpMq
, para x ¡ 0.
Seguros con deducible fijo
Algunos tipos de seguros, como el seguro contra accidentes de automoviles,contemplan el pago de una cantidad llamada deducible cada vez que elasegurado presenta una reclamacion ante la companıa aseguradora. Supon-gamos que dicho deducible es una cantidad fija de d unidades monetarias yque una reclamacion se modela con la variable aleatoria Y . Si el monto de lareclamacion es menor a d, el asegurado cubre la totalidad de la reclamacion,es decir, no hay reclamacion para la aseguradora. En cambio, si el monto dela reclamacion excede el valor de d, entonces el asegurado paga el deducibled y la aseguradora cubre la cantidad restante, es decir, maxt0, Y du. Deesta forma, los riesgos para este tipo de polizas de seguros se modelan con lasherramientas que hemos mencionado para el reaseguro de perdida maximacon nivel de retencion d.
Reaseguro en cada reclamacion (excess of loss)
Si se aplica la funcion hpxq mıntx,Mu a cada reclamacion Y de un riesgoque sigue el modelo colectivo, entonces el asegurador cubre
Y A mın tY,Mu
y el reasegurador cubre el monto restante
Y R Y mın tY,Mu
max t0, Y Mu.

98 4. Reaseguro
Por lo tanto, cada una de las aseguradoras asume los siguientes riesgos:
SA
N
j1
mın tYj ,Mu,
SR
N
j1
max t0, Yj Mu.
Analizando sumando a sumando estas dos expresiones es inmediato com-probar que
S SA SR.
A este esquema de reaseguro se le conoce tambien con el nombre de rease-guro por exceso de perdida (excess of loss). Observe nuevamente que si sesupone una distribucion continua para la variable aleatoria Yj con soporte elintervalo p0,8q, entonces las variables mıntYj ,Mu y maxt0, Yj Mu seranmixtas. La primera de ellas tendra una masa de probabilidad en el puntoM y la segunda en el origen. Observe ademas que las expresiones para SA
y SR corresponden exactamente a lo que hemos llamado modelo colectivode riesgo, es decir, se trata de sumas aleatorias de variables aleatorias nonegativas. En la parte inicial del texto hemos encontrado formulas y pro-cedimientos que pueden aplicarse para conocer las caracterısticas de estasvariables aleatorias.
Numero de reclamaciones
Sea NA el numero de reclamaciones que un asegurador afronta bajo unreaseguro por exceso de perdida (excess of loss) con nivel de retencion M
sin recurrir a la reaseguradora, es decir,
NA
N
j1
1pYj¤Mq
.
Por otro lado, sea NR el numero de reclamaciones que el reaseguradoratiende para este tipo de reaseguro, es decir,
NR
N
j1
1pYj¡Mq
.

4.2. Reaseguro no proporcional 99
Es claro que se cumple la identidad N NA NR. Observamos ademas
que, condicionado al evento pN nq, cada una de estas variables aleatoriastiene una distribucion binomial en donde n es el numero de ensayos y lasprobabilidades de exito son p P pYj ¤ Mq en el primer caso y 1 p
P pYj ¡ Mq en el segundo caso. La distribucion no condicional de estasvariables es el contenido del siguiente resultado en donde supondremos quela distribucion de N es conocida y corresponde a uno de tres casos.
Proposicion 4.1 Sea a P pYj ¤Mq.
1. Si N tiene distribucion binpn, pq, entonces
a) NA binpn, apq.
b) NR binpn, p1 aqpq.
2. Si N tiene distribucion Poissonpλq, entonces
a) NA Poissonpλaq.
b) NR Poissonpλp1 aqq.
3. Si N tiene distribucion bin negpk, pq, entonces
a) NA bin negpk, ppp ap1 pqqq.
b) NR bin negpk, ppp p1 aqp1 pqqq.
Demostracion. Verificaremos unicamente el primer resultado aplicandola formula general MSptq MN plnpMY ptqq cuando el riesgo S es la variableNA y una reclamacion Y tiene la forma particular 1
pYj¤Mq
, lo cual es unavariable aleatoria con distribucion Bernoulli. Observemos primeramente que
MY ptq EpetY q 1 a aet.
Entonces MNAptq MN plnp1 a aetqq. Cuando N tiene distribucionbinpn, pq tenemos que MN ptq p1 p petqn. Por lo tanto,
MNAptq p1 p pp1 a aetqqn p1 ap apetqn.
Es decir NA tiene distribucion binpn, apq. Analogamente puede verse queNR tiene distribucion binpn, p1aqpq. De la misma forma se demuestran los

100 4. Reaseguro
otros casos. Para ello debe recordarse que si N tiene distribucion Poissonpλq,entonces
MN ptq exppλpet 1qq,
y si N es bin negpk, pq, entonces
MN ptq ppp1 p1 pqetqqk.
¥
A manera de resumen de los tipos de reaseguro mencionados se tiene eldiagrama de la Figura 4.5.
Perdida maxima(stop loss)
Proporcional
Exceso de perdida(excess of loss)
Proporcional
Total delriesgo
Reclamacionesindividuales
Reaseguro
Figura 4.5
Comentarios y referencias
Mediante el reaseguro la companıa aseguradora se permite ceder parte deun riesgo a otra companıa llamada reaseguradora. Ante tal situacion, elesquema de asegurado y asegurador cobra vigencia y se replantean los pro-blemas originales ahora para el nuevo asegurado y la nueva aseguradora.En este capıtulo hemos estudiado dos formas de llevar a cabo el reaseguro:el reaseguro proporcional y el reaseguro no proporcional. A pesar de que

4.3. Ejercicios 101
los nombres reaseguro proporcional y reaseguro no proporcional podrıanparecer complementarios sugiriendo que son las dos unicas formas de rease-guro, tal afirmacion no es correcta, pues existen otros mecanismos mediantelos cuales el reaseguro puede efectuarse. Por ejemplo, en el texto de Rolskiet al. [32] se explica el reaseguro ECOMOR. Ası, desde el punto de vistamatematico el esquema de reaseguro genera dos nuevas variables aleatoriassusceptibles de estudiarse probabilısticamente: el riesgo que conserva la ase-guradora y el riesgo cedido a la reaseguradora. Y por supuesto se renuevael problema del calculo de la prima para asegurar el riesgo cedido. El temade reaseguro y varios de sus aspectos es tratado en mayor o menor medidaen los textos de teorıa de riesgo que se mencionan en la bibliografıa, enparticular Bowers et al. [7], Dickson [13] y Kaas et al. [22].
4.3. Ejercicios
Reaseguro proporcional
101. Para un reaseguro proporcional demuestre que:
a) EpSAq aEpSq.
b) VarpSAq a2VarpSq.
c)ErpSA
EpSAqq
3s
rVarpSAqs
32
ErpS EpSqq3s
rVarpSqs32.
102. Considere un riesgo S bajo un esquema de reaseguro proporcional.Es claro que, en general, las variables aleatorias SA
aS y SR
p1aqS no son independientes, de hecho hay una dependencia linealentre ellas. Demuestre que:
a) CovpSA, SRq ap1 aqVarpSq.
b) ρpSA, SRq 1.
c) SR
1aa
SA.
103. Suponga que un riesgo S sigue una distribucion Poisson compuestacon parametros λ 100 y F pxq dada por la distribucion exponen-cial de media 500. Bajo un esquema de reaseguro proporcional con

102 4. Reaseguro
a 0.7, encuentre la distribucion y los parametros de los riesgosSA
aS, y SR p1 aqS.
104. Suponga que un riesgo S sigue una distribucion binomial compuestacon parametros n 100, p 23, y F pxq dada por
F pxq
$
&
%
0 si x 50,12 si 50 ¤ x 100,1 si x ¥ 100.
Bajo un esquema de reaseguro proporcional con a 0.9, encuentrela esperanza y varianza de los riesgos SA
aS, y SR p1 aqS.
105. Bajo el esquema de reaseguro proporcional de un cierto riesgo S, elriesgo asumido por el asegurador es SA
aS, y la prima recibida esap. Suponga que el capital inicial de la aseguradora para afrontardicho riesgo es u. Demuestre que la probabilidad de insolvenciaP paS ¡ ap uq es una funcion creciente de a P p0, 1q.
106. Suponga que un riesgo S se modela mediante la distribucion exppλq.Demuestre que bajo un reaseguro proporcional el riesgo asumidopor la aseguradora SA
aS tiene distribucion exppλaq. ¿Cual esla distribucion de SR?
107. Suponga que un riesgo S se modela mediante la distribucion ga-mmapγ, λq. Demuestre que bajo un reaseguro proporcional el ries-go asumido por la aseguradora SA
aS tiene distribucion ga-mapγ, λaq. ¿Cual es la distribucion de SR?
108. Suponga que un riesgo S sigue una distribucion Poisson compues-ta con parametros λ 100, y F pxq dada por la distribucion ga-mapγ, λ0q. Bajo un esquema de reaseguro proporcional con a 0.9,encuentre la distribucion y los parametros de los riesgos SA
aS,y SR
p1 aqS.
109. Suponga que un riesgo S se modela mediante la distribucion lognormalpµ, σ2
q. Demuestre que bajo un reaseguro proporcional elriesgo asumido por la aseguradora SA
aS tiene distribucionlog normalpµ ln a, σ2
q. ¿Cual es la distribucion de SR?

4.3. Ejercicios 103
110. Suponga que un riesgo S sigue una distribucion Poisson compuestacon parametros λ 100, y F pxq dada por la distribucion log nor-malpµ, σ2
q. Bajo un esquema de reaseguro proporcional con a 0.9,encuentre la distribucion y los parametros de los riesgos SA
aS,y SR
p1 aqS.
Reaseguro de perdida maxima (stop loss)
111. Demuestre que bajo un reaseguro de perdida maxima con nivel deretencion M , los riesgos SA y SR tienen las siguientes funciones dedistribucion:
a) FSApxq
"
FSpxq si x M,
1 si x ¥M.
b) FSRpxq
"
0 si x 0,FSpM xq si x ¥ 0.
112. Para un reaseguro de perdida maxima con nivel de retencion M
y utilizando los resultados del inciso anterior, demuestre que paracualquier entero n ¥ 0:
a) ErpSAq
ns
» M
0
xnfSpxq dxMnP pS ¡Mq.
b) ErpSRq
ns
»
8
0
xnfSpM xq dx.
113. El n-esimo momento limitado. Sea S un riesgo con funcion de su-pervivencia continua F pxq P pS ¡ xq. Sea M cualquier constantepositiva. Demuestre que para cualquier entero n ¥ 1:
EpS ^Mq
n
» M
0
nxn1F pxq dx.
114. Considere un reaseguro de perdida maxima con nivel de retencionM para un riesgo S que sigue una distribucion exppλq. Demuestreque las funciones generadoras de momentos de los riesgos SA y SR
estan dadas por las siguientes expresiones:

104 4. Reaseguro
a) MSAptq 1
λ tpλ tepλtqM
q, para t λ.
b) MSRptq 1t
λ teλM , para t λ.
115. Suponga que un riesgo S se modela mediante la distribucion exppλq.Demuestre que bajo un reaseguro de perdida maxima con nivel deretencion M , se tiene que:
a) EpSAq
1
λ
1 eλM
.
b) EpSRq
1
λeλM .
116. Suponga que el riesgo S sigue una distribucion lognormalpµ, σ2q.
Bajo un reaseguro de perdida maxima con nivel de retencion M ,demuestre que
ErpSAq
ns enµn2σ2
2ΦpplnM µ nσ2qσq
Mnp1 ΦpplnM µqσqq.
117. Suponga que un riesgo S tiene la distribucion de probabilidad queaparece en la tabla de abajo. Calcule la distribucion de probabi-lidad de los pagos positivos que efectua una reaseguradora en unreaseguro de perdida maxima con nivel de retencion M 350.
x 100 200 300 400 500
P pS xq 0.1 0.2 0.3 0.2 0.2
118. Suponga que se establece como funcion de probabilidad para unriesgo S la que aparece en la tabla de abajo. Calcule la distribucionde probabilidad de los pagos positivos que efectua una reasegu-radora en un reaseguro de perdida maxima con nivel de retencionM 30.
x 10 20 30 40 50
P pS xq 0.2 0.3 0.1 0.1 0.3
119. Suponga que el riesgo S sigue una distribucion Paretopa, bq. Ba-jo el reaseguro de perdida maxima, demuestre que la distribuciondel riesgo SR condicionada al evento pSR
¡ 0q es nuevamenteParetopa, bMq.

4.3. Ejercicios 105
120. Suponga que el riesgo S sigue una distribucion exppλq. Bajo unreaseguro de perdida maxima con nivel de retencion M , demuestreque la distribucion del riesgo SR condicionado a ser positivo esnuevamente exppλq.
Reaseguro en cada reclamacion (excess of loss)
121. Suponga que se establece como funcion de probabilidad para la va-riable aleatoria Y la que aparece en la tabla de abajo. Esta variablealeatoria representa el monto de una reclamacion en un seguro. Con-sidere una reaseguro excess of loss para Y , con nivel de retencionM 100.
y 50 100 150 200P pY yq 0.2 0.3 0.4 0.1
a) Calcule la funcion de probabilidad para las variables Y A
mıntY,Mu y Y R maxt0, Y Mu.
b) Calcule las esperanzas de estas variables aleatorias y com-pruebe que EpY q EpY A
q EpY Rq.
122. Suponga que el monto de una reclamacion Y se modela medianteuna variable aleatoria con distribucion exppλq. Para un valor de re-tencion M ¡ 0 fijo, calcule la funcion de distribucion y la esperanzade las variables aleatorias mıntY,Mu y maxt0, Y Mu.
123. Demuestre que la funcion generadora de probabilidad de la variableNR (numero de reclamaciones que la reaseguradora afronta) en unreaseguro por exceso de perdida con nivel de retencion M es
PNRptq PN p1 p ptq,
en donde p P pYj ¡ Mq y PN ptq es la funcion generadora deprobabilidad del numero total de reclamaciones N .
124. Considere un reaseguro por exceso de perdida y sean NA y NR
el numero de reclamaciones afrontadas por el segurador y por elreasegurador respectivamente. El total de reclamaciones es
N NANR.

106 4. Reaseguro
Suponga que N tiene distribucion Poissonpλq.
a) Condicionando sobre el valor deN , demuestre que las variablesNA y NR son independientes.
b) Compruebe que NA y N no son independientes. Verifique, porejemplo, que P pNA
0, N 0q P pNA 0qP pN 0q.
Suponga ahora que N tiene distribucion binpn, pq. Evaluando laprobabilidad, por ejemplo, en el valor cero para ambas variablesaleatorias, demuestre que:
c) NA y NR no son independientes.
d) N y NA no son independientes.
125. Suponga que un cierto riesgo S se representa mediante un modelocolectivo. Condicionando sobre los posibles valores de la variablealeatoria N , demuestre que las variables NA y NR tienen la mismadistribucion que N pero con distintos parametros en los casos cuan-do N es Poisson, binomial y binomial negativa. Este es un metodoalternativo de la demostracion de la Proposicion 4.1 en donde seuso la funcion generadora de momentos.
126. Considere un riesgo S con distribucion Poisson compuesta de pa-rametro λ. Suponga que cada reclamacion Y tiene distribucionParetopa, bq. Se adquiere un reaseguro por exceso de perdida connivel de retencion M y por lo tanto la reclamacion afrontada porla aseguradora es Y A
mıntY,Mu. Demuestre que:
a) EpY Aq EpY q
b
bM
a1
EpY q.
b) EpSAq EpSq
b
bM
a1
EpSq.
127. Suponga se tiene un riesgo de la forma S °N
j1Yj , segun el mo-
delo colectivo, en donde cada reclamacion se modela mediante unavariable aleatoria con distribucion exppαq. Bajo un reaseguro porexceso de perdida con nivel de retencion M , el monto a pagar por laaseguradora por cada reclamacion es Y A
mıntY,Mu. Demuestreque:

4.3. Ejercicios 107
a) EpY Aq
1
αp1 eαM
q.
b) EppY Aq
2q
2
α2
2
α2eαM
2M
αeαM .
c) VarpY Aq
1
α2
2M
αeαM
1
α2e2αM .
d) EpY Aq ¤ EpY q.
e) VarpY Aq ¤ VarpY q.
Usando las formulas generales encuentre ahora la esperanza y va-rianza de SA
°Nj1
mıntYj ,Mu.


Capıtulo 5
Teorıa de la credibilidad
Considere un cierto riesgo proveniente de un conjunto de asegurados vigentespor un periodo determinado. Si este grupo de asegurados es homogeneo en elsentido de que todos sus miembros tienen las mismas condiciones estocasti-cas de realizar una reclamacion, entonces es razonable aplicar una mismaprima a todos ellos. Sin embargo, cuando el grupo no es homogeneo, o bien,surge con el paso del tiempo cierta heterogeneidad entre ellos, habra subgru-pos de bajo riesgo y otros de alto riesgo. Cobrar una misma prima a todosserıa injusto, y no serıa bueno para la aseguradora, pues eventualmente losasegurados de bajo riesgo buscarıan un mejor trato con otra aseguradora.La idea fundamental es aplicar primas menores a los asegurados de bajoriesgo y primas mayores a los de alto riesgo, con base en el historial dereclamaciones que cada uno de los asegurados o subgrupos hayan realizadodurante los periodos anteriores. En la teorıa de la credibilidad se estudianmetodos para el calculo de primas a traves de la combinacion de la ex-periencia individual (historial de reclamaciones) y la experiencia de grupo(comportamiento teorico).Este capıtulo es breve y unicamente se exponen algunas ideas introductoriasa la credibilidad clasica y Bayesiana. Una exposicion mas completa de estetema puede encontrarse en los textos [6], [9] y [23].
109

110 5. Teorıa de la credibilidad
5.1. Credibilidad clasica
Esta perspectiva de la teorıa de la credibilidad constituye el primer intentode definir la credibilidad para un conjunto de observaciones de un riesgo.Las ideas que presentaremos en esta primera seccion fueron propuestas ini-cialmente por A. H. Mowbray en 1914 y desarrolladas despues por variosactuarios estadounidenses durante la primera mitad del siglo XX. Debido aello es que a la credibilidad clasica se le conoce tambien como credibilidadamericana.
Credibilidad completa
Suponga que S representa el riesgo para una aseguradora correspondiente aun asegurado o un conjunto de asegurados con ciertas caracterısticas parti-culares, y valido por un periodo fijo, por ejemplo, un ano. Sean S1, . . . , Sm
los montos de las reclamaciones efectuadas por este asegurado o grupo deasegurados durante m periodos consecutivos, y sea S la media muestral opromedio de reclamaciones, es decir,
S 1
mpS1 Smq.
Nos interesa estudiar el comportamiento de S a lo largo del tiempo paraun conjunto de asegurados en particular, pues deseamos determinar si laprima que se les cobra a cada uno de ellos es la adecuada. Si se consideraque las variables S1, . . . , Sm son independientes, identicamente distribuidasy con esperanza finita, entonces la ley de los grandes numeros garantiza quela media muestral S converge a la constante desconocida EpSq, conforme elnumero de sumandos crece a infinito, vease la Figura 5.1.Es decir, el comportamiento de S como funcion de m es posiblemente oscila-torio alrededor de EpSq pero eventualmente va a estabilizarse en ese valor.La pregunta es, ¿que tan grande debe ser m para que S este razonablementecercano al valor desconocido EpSq? La intencion es usar S para calcular laprima pura de riesgo de un asegurado o grupo de asegurados, siempre ycuando se tenga suficiente historial para dar credibilidad a tal estadıstica.El siguiente criterio es una posible respuesta a la pregunta planteada.

5.1. Credibilidad clasica 111
S
EpSq
m
Figura 5.1
Definicion 5.1 Sea S1, S2, . . . , Sm una coleccion de v.a.i.i.d. con esperanzafinita. Sean k P p0, 1q y p P p0, 1q dos numeros fijos. Se dice que la mediamuestral S pS1 Smqm tiene credibilidad completa pk, pq si
P p |S EpSq| ¤ kEpSq q ¥ p. (5.1)
La condicion anterior establece que S tiene credibilidad completa si dista deEpSq, en menos de kEpSq con probabilidad mayor o igual a p. Observe quela definicion tiene sentido cuando EpSq es distinta de cero. Naturalmente setoman valores de k cercanos a cero y valores de p cercanos a 1, tıpicamentek 0.05 y p 0.9 . El problema es entonces encontrar el valor del numerode periodos de observacion m para que se cumpla el criterio (5.1).
Credibilidad completa bajo hipotesis de normalidad
Encontraremos una condicion sobre el numero de periodos de observacion m
para obtener credibilidad completa cuando S tiene una distribucion aproxi-mada normal. Observe que EpSq EpSq, VarpSq VarpSqm y que estosvalores son desconocidos. Tenemos entonces que, por el teorema central del

112 5. Teorıa de la credibilidad
lımite, la parte izquierda de (5.1) es
P p |S EpSq| ¤ kEpSq q P p|S EpSq|a
VarpSqm¤
kEpSqa
VarpSqmq
P pkEpSq
a
VarpSqm¤ Z ¤
kEpSqa
VarpSqmq
ΦpkEpSq
a
VarpSqmq Φp
kEpSqa
VarpSqmq
2Φpk?
mEpSqa
VarpSqq 1.
Como esta probabilidad debe ser mayor o igual a p segun el criterio (5.1),se obtiene la desigualdad
Φpk?
mEpSqa
VarpSqq ¥
1 p
2.
Deseamos encontrar el valor de m mas pequeno que cumpla esta desigual-dad. Para ello consideraremos que se tiene la igualdad en esta ecuacion. Seauq el q-cuantil de la distribucion normal, es decir Φpuqq q. Entonces
k?
mEpSqa
VarpSq¥ u
p1pq2.
Despejando el parametro m se obtiene el siguiente resultado.
Proposicion 5.1 Sea S1, S2, . . . , Sm una coleccion de v.a.i.i.d. con mediay varianza finitas. La media muestral S pS1 Smqm alcanza cre-dibilidad completa pk, pq de manera aproximada cuando
m ¥
u2p1pq2
VarpSq
k2E2pSq
. (5.2)
Tomando k 0.05 y p 0.9 tenemos que up1pq2 u0.95 1.6449. Por lo

5.1. Credibilidad clasica 113
tanto la desigualdad (5.2) se reduce a
m ¥ 1082VarpSq
E2pSq
.
El problema aun prevalece puesto que los terminos EpSq y VarpSq no sonconocidos. En este punto se introduce otro factor de inexactitud en el analisisal sustituir EpSq y VarpSq por la media y varianza muestrales usando lainformacion que se tenga a disposicion al momento de hacer la estimacion:
EpSq s 1
n
n
j1
sj ,
VarpSq
1
n 1
n
j1
psj sq2.
Sustituyendo estos valores en la formula se puede conocer una aproximaciondel numero de periodos m de historial para que S tenga credibilidad comple-ta. Observe que cuando p crece, es decir, cuando se desea tener una mayorconfianza en la estabilizacion de S, entonces el numero de periodos de ob-servacion m tambien crece. Por otro lado, si el parametro k crece, es decir,si se pide que la distancia entre S y EpSq tenga mayor amplitud, entonces mdecrece. Observemos finalmente que, despues de algunos calculos sencillos,la aproximacion para la credibilidad completa (5.2) puede expresarse de lasiguiente forma:
VarpSq ¤k2E2
pSq
u2p1pq2
. (5.3)
Esto significa que la credibilidad completa se logra cuando la varianza o va-riabilidad de S ha sido suficientemente reducida. En esta expresion el termi-no desconocido EpSq debe ser sustituido por la media muestral. En generalse necesitan muchos periodos de observacion de un riesgo para obtener lacredibilidad completa de la media muestral, y ello no es factible de tenerseen muchos casos.
Ejemplo 5.1 Suponga que un riesgo para un grupo de asegurados sigue elmodelo colectivo
S
N
j1
Yj ,

114 5. Teorıa de la credibilidad
en donde N tiene distribucion Poissonpλq con λ desconocido. Suponga adi-cionalmente que cada reclamacion individual Y tiene distribucion exppαq.De acuerdo con la notacion previa, el primer y segundo momentos de Y sonµ1 1α y µ2 2α2. Entonces
EpSq λµ1 λα,
VarpSq λµ2 2λα2.
Por lo tanto, tomando nuevamente k 0.05 y p 0.9, la aproximacion (5.2)es
m ¥ 10822λα2
λ2α2
,
o bien,
λm ¥ 2164.
Observe que λm representa el total de reclamaciones promedio durante m
periodos y tal cantidad es desconocida pues no conocemos λ. Sin embargo,aproximando λm por el estimador N1N2 Nm, la condicion anteriorestablece que despues de 2164 reclamaciones se obtiene credibilidad completapara S, suponiendo disponibles tales estadısticas. Ası, en este caso el crite-rio de credibilidad completa para S ha quedado expresado en terminos delnumero de reclamaciones promedio λm y no del numero de periodos m.
Credibilidad parcial
En lugar del estimador S para EpSq se propone la combinacion lineal con-vexa
zS p1 zqEpSq, (5.4)
en donde z P r0, 1s es llamado factor de credibilidad. Mediante una expresioncomo la propuesta se le otorga credibilidad parcial a la media muestralS. Sin embargo, es muy importante notar que la expresion (5.4) no es unestimador de la media desconocida EpSq puesto que depende de ella misma.A pesar de esto, aplicaremos la condicion de credibilidad completa (5.1) aesta expresion y encontraremos una formula para el factor de credibilidadz. Ası, la condicion (5.1) aplicada a la expresion (5.4) se reduce a
P p |zpS EpSqq| ¤ kEpSq q ¥ p.

5.1. Credibilidad clasica 115
Observe que esta formula hace referencia unicamente al primer sumandode (5.4). Reescribimos la expresion anterior de la forma siguiente:
P p |S EpSq| ¤k
zEpSq q ¥ p.
Esta es la misma condicion para la credibilidad completa solo que en lugardel parametro k tenemos ahora kz, es decir, la credibilidad completa pk, pqpara zSp1zqEpSq es equivalente a la credibilidad completa pkz, pq paraS.
Credibilidad parcial bajo hipotesis de normalidad [i]
Nuevamente bajo la hipotesis de normalidad para S, la credibilidad com-pleta pk, pq para zSp1zqEpSq se obtiene de manera aproximada cuando
m ¥
z2 u2p1pq2
k2VarpSq
E2pSq
. (5.5)
Considerando igualdad se obtiene una expresion para el factor de credibili-dad
z k?
mEpSq
up1pq2
a
VarpSq. (5.6)
Este valor de z excede el valor de 1 para valores suficientemente grandes dem, por lo tanto se define el factor de credibilidad como
z mın! k
?
mEpSq
up1pq2
a
VarpSq, 1
)
. (5.7)
La esperanza y varianza de S se aproximan mediante la media y varianzamuestrales calculados para un numero determinado de periodos m. Para losvalores de k 0.05 y p 0.9 se tiene que
z mın!
?
m
32.89
EpSqa
VarpSq, 1
)
.

116 5. Teorıa de la credibilidad
Credibilidad parcial bajo hipotesis de normalidad [ii]
Otro mecanismo para obtener el factor de credibilidad (5.7) es proponiendocomo estimador de EpSq a la estadıstica
zS p1 zqµ, (5.8)
en donde µ es la prima que se le cobra al asegurado o grupo de aseguradosantes de tener alguna experiencia real de sus reclamaciones. A esta primase le llama “prima de manual”, pues es calculada antes de tomar en cuentael historial de reclamaciones. De acuerdo al criterio (5.3), el estimador (5.8)tiene credibilidad completa cuando su varianza cumple
VarpzS p1 zqµq ¤k2E2
pSq
u2p1pq2
Considerando igualdad y despejando z se encuentra nuevamente la expre-sion (5.6).
Ejemplo 5.2 Considere nuevamente un riesgo S con distribucion Poissoncompuesta S
°Nj1
Yj, en donde N tiene distribucion Poissonpλq y Y
tiene distribucion exppαq. Para los valores de k y p mencionados antes, lacondicion de credibilidad parcial (5.5) para zS p1 zqEpSq se reduce a
λm ¥ 2164z2,
Considerando igualdad y despejando z se obtiene z ?
λm46.52, en dondeλm se sustituye por el numero de reclamaciones totales que se hayan pre-sentado en m periodos, siempre y cuando
?
λm ¤ 46.52. De esta manera laprima pura de riesgo por credibilidad parcial es la combinacion lineal
prima
?
λm
46.52S p1
?
λm
46.52qEpSq,
en donde EpSq λα es el valor esperado teorico supuesto para el riesgoS y S es la experiencia observada. Es interesante notar que el factor decredibilidad z
?
λm46.52 es creciente conforme la expresion λm crece,dando ası paulatinamente mayor credibilidad a S y reduciendo el factor parala media teorica EpSq. Cuando λm alcanza el valor 2164 (cuya raız cuadradaes 46.52) la media muestral S alcanza credibilidad completa.

5.2. Credibilidad Bayesiana 117
5.2. Credibilidad Bayesiana
La credibilidad Bayesiana es otra forma de incorporar el historial de reclama-ciones de un grupo de asegurados en el calculo de las primas. Explicaremosa continuacion de manera breve la situacion general en esta perspectiva dela estadıstica y despues aplicaremos estas ideas en dos casos particulares.
Estimacion Bayesiana
En la estadıstica tradicional se considera el problema de estimacion de unparametro θ de una distribucion de probabilidad dada fpx; θq. Para ello seconsidera una muestra aleatoria de esta distribucion y se estudian distintosmetodos para estimar θ, considerando siempre que este parametro tiene unvalor desconocido y fijo. Existe, sin embargo, un punto de vista distintollamado estimacion Bayesiana. Desde esta perspectiva se considera que θ
es una variable aleatoria para la cual se asume una distribucion de pro-babilidad hpθq llamada a priori. Esta distribucion refleja cierta informacionsubjetiva o cuantitativa que el observador pueda tener sobre el parametro θ.La distribucion conjunta de una muestra aleatoria de la distribucion fpx; θqy el parametro θ es
fpx1, . . . , xm, θq fpx1, . . . , xm | θqhpθq
m¹
i1
fpxi | θqhpθq.
La distribucion marginal de la muestra es entonces
fpx1, . . . , xmq
»
θ
m¹
i1
fpxi | θqhpθq dθ.
Conociendo estas funciones puede ahora calcularse la distribucion condi-cional de θ dada la muestra como sigue:
gpθ |x1, . . . , xmq
fpx1, . . . , xm | θqhpθq
fpx1, . . . , xmq
m¹
i1
fpxi | θqhpθq
»
θ
m¹
i1
fpxi | θqhpθq dθ
. (5.9)

118 5. Teorıa de la credibilidad
De esta forma la distribucion a priori hpθq representa cierta informacion queel observador conoce del parametro θ antes de tomar la muestra, y la ası lla-mada distribucion a posteriori gpθ |x1, . . . , xmq es la distribucion modificadaa la luz de la muestra aleatoria. Teniendo ahora esta distribucion a posteri-oripara θ, uno puede proponer varias formas de estimar este parametro, unade ellas es simplemente tomar la esperanza de esta distribucion, es decir, unestimador Bayesiano para θ es
θ Epθ |x1, . . . , xmq
»
θ gpθ |x1, . . . , xmq dθ.
En general, la expresion que pueda encontrarse para la distribucion a pos-teriori para θ usando la formula (5.9) puede ser muy complicada y no seruna distribucion con la cual estemos familiarizados. Ilustraremos estas ideascon un ejemplo particular en donde el resultado final, sin embargo, es unadistribucion conocida. Aplicaremos despues la estimacion Bayesiana al pro-blema de calcular primas puras de riesgo tomando en cuenta el historial dereclamaciones.
Ejemplo 5.3 Suponga que X1, . . . , Xm es una muestra aleatoria de la dis-tribucion Berppq, y suponga ademas que el parametro p tiene una distribu-cion betapa, bq, con a y b conocidos. Observe que el soporte de la distribu-cion beta es el intervalo r0, 1s, de modo que en este sentido tal distribuciones factible para el parametro p. La densidad conjunta de la muestra y elparametro es
fpx1, . . . , xm, pq fpx1, . . . , xm | pqhppq
pmxp1 pqmmx 1
Bpa, bqpa1
p1 pqb1
1
Bpa, bqpamx1
p1 pqmmxb1.
Integrando respecto a p se obtiene la densidad marginal de la muestra,
fpx1, . . . , xmq
1
Bpa, bq
»
1
0
pamx1p1 pqmmxb1 dp
Bpamx,mmx bq
Bpa, bq.

5.2. Credibilidad Bayesiana 119
Por lo tanto, la densidad a posteriori para p es
gpp |x1, . . . , xmq 1
Bpamx,mmx bqpamx1
p1 pqmmxb1.
Esta es la densidad betapamx,mmx bq, y su esperanza puede usarsecomo un estimador Bayesiano para p, es decir,
p
amx
m a b
m
m a bx p1
m
m a bq
a
a b. (5.10)
Esta ultima expresion para el estimador Bayesiano es interesante pues tienela misma forma que la que se habıa propuesto en la credibilidad parcial. Ob-serve que en la ecuacion (5.10) conforme el tamano de la muestra m crece,el estimador Bayesiano para la media toma esa informacion y le asocia unpeso mayor a la media muestral x en detrimento de la media de la distribu-cion a priori apa bq.
Ahora aplicaremos estas ideas al problema del calculo de primas tomandoen cuenta la experiencia de un riesgo. Suponga que las variables S1, . . . , Sm
representan el historial de reclamaciones en m anos o periodos que se hanregistrado de un riesgo dado. Suponga ademas que estas variables son in-dependientes y todas ellas tienen una distribucion comun dependiente deun parametro desconocido θ. Por lo tanto la esperanza del riesgo EpSq esuna funcion de este parametro θ. Bajo el enfoque Bayesiano se consideraque el parametro θ es una variable aleatoria para la cual se asume una dis-tribucion de probabilidad a priori. La esperanza a posteriori de θ, es decir,θ Epθ |S1, . . . , Smq, representa una estimacion para θ tomando en cuentael historial S1, . . . , Sm. Ası, podemos incorporar este estimador Bayesianoen el calculo de EpSq y encontrar la prima pura de riesgo. En los ejemplosque consideraremos EpSq es directamente el parametro θ y por lo tanto suestimacion θ es la prima pura de riesgo para S, es decir,
EpSq θ Epθ |S1, . . . , Smq.
A esta esperanza a posteriori se le llama prima de credibilidad Bayesiana.Los casos que consideraremos para la distribucion de S son: la distribucion

120 5. Teorıa de la credibilidad
Poisson con media λ, y la distribucion normal con media θ. Encontraremosque en estos casos la prima pura de riesgo tiene la forma de la credibilidadparcial mencionada antes.
Ejemplo 5.4 (Modelo Poisson-gama) Este modelo adquiere su nom-bre a partir de las siguientes hipotesis: se postula que cada una de lasvariables aleatorias independientes S1, . . . , Sm tiene distribucion Poissoncon parametro λ, el cual se considera aleatorio con distribucion a priorigamapγ, αq, con γ y α parametros conocidos. Observe que en este modeloEpSq λ y se considera que los montos de las reclamaciones toman valoresenteros. La funcion de densidad a posteriori de λ es, para x ¡ 0,
gpλ |S1, . . . , Smq
fpS1, . . . , Sm |λqhpλq»
8
0
fpS1, . . . , Sm |λqhpλq dλ
m¹
j1
p
λSj
Sj !eλ
q
αγ
Γpγqλγ1eαλ
»
8
0
m¹
j1
p
λSj
Sj !eλ
q
αγ
Γpγqλγ1eαλ dλ
λmSγ1epmαqλ
»
8
0
λmSγ1epmαqλ dλ
pm αqmSγ
ΓpmS γqλmSγ1epmαqλ.
Es decir, la densidad a posteriori es gamapmS γ,m αq. Por lo tanto laprima por credibilidad, esperanza de esta densidad, es
prima EpSq
λ
Epλ |S1, . . . , Smq
mS γ
m α
m
m αS
α
m α
γ
α
z S p1 zqγ
α,

5.2. Credibilidad Bayesiana 121
en donde z mpm αq es el factor de credibilidad. Esta cantidad crecemonotonamente a 1 cuando m crece a infinito, dando cada vez mas credibili-dad a la media muestral S y favoreciendo cada vez menos a la media teoricaγα. Observe ademas que cuando m crece a infinito, la media de la distribu-cion a posteriori converge a la media muestral lımite dado por el historial dereclamaciones, y que la varianza de λ dada por Varpλq pmSγqpmαq2
converge a cero, lo cual indica que la distribucion a posteriori se concentracada vez mas alrededor de su media.
Ejemplo 5.5 (Modelo normal-normal) En este modelo se postula quecada una de las reclamaciones S1, . . . , Sm tiene distribucion Npθ, σ2
q, endonde el parametro σ2 es conocido y la media θ es una variable aleatoria condistribucion Npµ, η2q, con µ y η2 conocidos. La primera hipotesis puede serjustificada en el caso cuando los montos anuales se componen de un grannumero de reclamaciones individuales, para ello no es necesario suponerque las reclamaciones individuales tienen la misma distribucion. La segundahipotesis podrıa ser razonable si es que los parametros µ y η2 son tales que laprobabilidad asignada a la parte negativa del eje es muy pequena. Tenemosnuevamente en este caso la situacion EpSq θ y nuestro objetivo es estimarmediante estadıstica Bayesiana este parametro desconocido. La funcion dedensidad a posteriori de θ es
gpθ |S1, . . . , Smq
fpS1, . . . , Sm | θqhpθq»
8
8
fpS1, . . . , Sm | θqhpθq θ dθ
1?
2πσ2e°m
j1pSjθq22σ2 1a
2πη2epθµq22η2
»
8
8
1?
2πσ2e°m
j1pSjθq22σ2 1a
2πη2epθµq22η2 dθ
.
Nos concentramos en analizar unicamente el exponente. Tenemos que
m
j1
pSj θq2
2σ2
pθ µq2
2η2 θ2p
m
2σ2
1
2η2q 2θp
mS
2σ2
µ
2η2q
p
m
j1
S2j
2σ2q
µ2
2η2.

122 5. Teorıa de la credibilidad
Completando el cuadrado en θ, esta expresion se puede escribir como sigue
rθ pmS
σ2
µ
η2qp
m
σ2
1
η2qs
2
2pm
σ2
1
η2q
1
p
mS
σ2
µ
η2q
2
2pm
σ2
1
η2q
p
m
j1
S2j
2σ2q
µ2
2η2.
Este exponente aparece tanto en el numerador como en el denominador, ycomo los ultimos dos sumandos no dependen de θ estos desaparecen comple-tamente al efectuar el cociente. Lo que resulta es nuevamente la distribucionnormal
gpθ |S1, . . . , Smq 1
2πpm
σ2
1
η2q
1
expt
rθ pmS
σ2
µ
η2qp
m
σ2
1
η2qs
2
2pm
σ2
1
η2q
1
u.
La media de esta distribucion es entonces la prima por credibilidad, es decir,
prima EpSq
θ
Epθ |S1, . . . , Smq
p
mS
σ2
µ
η2qp
m
σ2
1
η2q
mη2
mη2 σ2S
σ2
mη2 σ2µ
z S p1 zqµ,
en donde z mη2pmη2 σ2q es el factor de credibilidad, el cual tiene
nuevamente comportamiento monotono creciente a 1 conforme m crece ainfinito. Observe ademas que Varpθq p
mσ2
1
η2q
1 y que esta cantidadconverge a cero cuando el tamano de muestra m crece a infinito, indican-do nuevamente que la distribucion a posteriori se concentra cada vez masalrededor de su media.
En los ejemplos anteriores ha sucedido que la distribucion a posteriorigpθ |x1, . . . , xmq para el parametro de interes θ pertenece a la misma familia

5.3. Ejercicios 123
de la distribucion a priori hpθq. Cuando esta situacion ocurre, se dice que ladistribucion de la muestra y la distribucion a priori para el parametro sonconjugadas, o que estas dos familias de distribuciones son conjugadas. Ennuestros ejemplos, la distribuciones Poisson y gama son conjugadas, ası co-mo la distribucion normal es conjugada consigo misma. Mediante estos dosejemplos se ha mostrado que la propiedad de conjugacion para dos familiasde distribuciones tiene ventajas, pues al poder identificar la distribuciona posteriori pueden calcularse sus caracterısticas numericas mediante lasformulas conocidas, en particular, su esperanza.
Comentarios y referencias
En este capıtulo hemos planteado el problema de incorporar el historial dereclamaciones de un asegurado o grupo de asegurados en el calculo de laprima. Nuestra perspectiva ha sido introductoria y unicamente los elemen-tos iniciales de algunos modelos se han mencionado. Una exposicion mascompleta sobre la teorıa de la credibilidad puede encontrarse en los tex-tos de Klugman et al. [23] y Boland [6]. El libro de Buhlmann y Gisler [9]esta dedicado completamente al desarrollo de este tema.
5.3. Ejercicios
Credibilidad completa
128. Lanzamiento de una moneda. Sean S1, . . . , Sm los resultados de m
lanzamientos sucesivos de una moneda con valores 0 y 1, depen-diendo si se obtiene una cara de la moneda o la otra.
a) Suponiendo que la moneda esta equilibrada, use la aproxi-macion normal para encontrar el valor de m para obtenerla credibilidad completa pk, pq para S pS1 Smqm.Suponga k 0.1 y p 0.9.
b) Suponga ahora que no sabemos que la moneda esta equili-brada pero la probabilidad θ de obtener el valor 1 es tal que14 ¤ θ ¤ 34. Obtenga una aproximacion del valor de m
para la credibilidad completa de la media muestral. Suponganuevamente k 0.1 y p 0.9.

124 5. Teorıa de la credibilidad
129. Encuentre el valor de m para obtener la credibilidad completa pk, pqpara S pS1 Smqm de un riesgo S con distribucion Np5, 1q.Suponga k 0.15 y p 0.9. Observe que en esta situacion conoce-mos EpSq y simplemente se pide aplicar la condicion para la credi-bilidad completa de la media muestral.
130. Suponga que el numero de observaciones m de un riesgo es fijoy se desea que la media muestral de estas observaciones cumplala condicion (5.2) para la credibilidad completa pk, pq modificandolos valores de k y p. Demuestre que debe cumplirse alguna de lassiguientes dos condiciones:
a) k ¥
d
up1pq2VarpSq
mE2pSq
.
b) p ¤ 2Φ
d
mk2E2pSq
VarpSq
1.
131. Credibilidad para el numero de reclamaciones. Sean N1, . . . , Nm elnumero de reclamaciones durante m periodos de un riesgo S condistribucion Poisson compuesta, es decir,
S
N
j1
Yj ,
en donde N tiene distribucion Poissonpλq con λ desconocido. En-cuentre un criterio para darle credibilidad completa pk, pq a
N
1
mpN1 N2 Nmq
como el verdadero valor de λ. Suponga k 0.05 y p 0.9 .
Credibilidad parcial
132. Use la aproximacion normal para encontrar la prima por credibili-dad parcial, a partir de una muestra S1, . . . , Sm, de un riesgo S condistribucion Paretop4, 3q. Suponga k 0.1 y p 0.9.

5.3. Ejercicios 125
133. Use la aproximacion normal para encontrar la prima por credibi-lidad parcial con k 0.1 y p 0.9 considerando el historial dereclamaciones S1, . . . , Sm de un riesgo de la forma S
°Nj1
Yj , endonde:
a) N se distribuye binpn, pq con n 100 y p 12, y Yj sedistribuye exppαq con α 110.
b) N se distribuye bin negpα, pq con α 10 y p 13, y Yj sedistribuye exppαq con α 110.
Estimacion Bayesiana
134. Suponga que el numero de reclamaciones X de un cierto riesgosigue una distribucion Poisson de parametro λ. Se considera queel parametro λ es desconocido y se le modela como una variablealeatoria con distribucion exppµq. Demuestre que la distribucion aposteriori o no condicional de X es la siguiente distribucion geome-trica:
P pX xq µ
1
1 µ
x1
para x 0, 1, 2, . . .
135. Suponga que N tiene una distribucion Poissonpλq, y que condi-cionada al valor de N la variable X tiene distribucion binpN, pq.Demuestre que la distribucion no condicional de X es Poissonpλpq.


Capıtulo 6
Procesos estocasticos
En este capıtulo se presenta una introduccion breve al tema de los procesosestocasticos. Se explican algunos conceptos y propiedades generales de estetipo de modelos matematicos y se estudian brevemente algunos ejemplosparticulares de procesos estocasticos. Este material sera usado en la ultimaparte del libro en donde consideraremos algunos modelos estocasticos de-pendientes del tiempo aplicados a los seguros. Supondremos como elementobase un espacio de probabilidad pΩ,F , P q.
6.1. Conceptos elementales
Definicion 6.1 Un proceso estocastico es una coleccion de variables aleato-rias tXt : t P T u, parametrizada por un conjunto T llamado espacio parame-tral. A los valores de estas variables aleatorias los llamaremos estados delproceso.
El conjunto T usualmente se interpreta como un conjunto de tiempos. Ası,para cada tiempo t se tiene la variable aleatoria Xt, la cual representa elestado o valor del sistema en estudio al tiempo t. Por ejemplo, en finan-zas Xt puede representar el precio de un bien o una accion al tiempo t;
127

128 6. Procesos estocasticos
en el contexto de los seguros Xt puede representar el balance al tiempot de una aseguradora respecto de una cartera de asegurados; en fısica Xt
puede modelar la posicion o velocidad de una partıcula que se mueve de-bido a los multiples choques con otras partıculas circundantes. Se dice queun proceso es a tiempo discreto en caso de que el conjunto de parametrossea un conjunto discreto, por ejemplo, T t0, 1, 2, . . .u. Ası, el sistema seobserva o mide en tiempos discretos. En este caso el proceso consiste de unasucesion infinita de variables aleatorias que se denota por tXn : n ¥ 0u otXn : n 0, 1, 2, . . .u y consiste explıcitamente de la sucesion
X0, X1, X2, . . .
n
Xnpωq
b
b
b
b
b
b
X0
1
X1
2
X2
3
X3
4
X4
5
X5
Figura 6.1
Se dice en cambio que el proceso es a tiempo continuo cuando el conjuntode parametros consiste de un subintervalo de R, por ejemplo, T r0,8q, yse considera entonces que el sistema se observa continuamente en el tiempo.En este caso el proceso se puede escribir como sigue:
tXt : t ¥ 0u.
Ası, tomaremos como convencion que si el subındice es n, el proceso esa tiempo discreto y si es t, el tiempo es continuo. Un proceso estocasticotambien puede considerarse como una funcion de dos variables:
X : T ΩÑ R,

6.1. Conceptos elementales 129
tal que para cada t P T , la funcion ω ÞÑ Xtpωq es una variable aleatoria,mientras que para cada ω en Ω, la funcion t ÞÑ Xtpωq es una trayectoria orealizacion del proceso. Con este modelo se pretende representar la evolucionaleatoria de un sistema a lo largo del tiempo. En la Figura 6.1 se muestrauna trayectoria de un proceso a tiempo discreto y en la Figura 6.2 se ilustrael caso cuando el tiempo es continuo.
t
Xtpωq
b
bb
Xt1
t1
b
Xt2
t2
b
Xt3
t3
Figura 6.2
Una de las caracterısticas mas importantes que distingue a los distintostipos de procesos estocasticos es el grado de dependencia probabilıstica quepudiera establecerse entre las variables aleatorias que conforman el proceso.La especificacion de estas dependencias nos permitira definir mas adelantealgunos tipos de procesos estocasticos particulares. Veremos a continuacionalgunas propiedades generales que pueden cumplir los procesos estocasticos.
Propiedad de Markov
Se dice que un proceso estocastico a tiempo discreto tXn : n ¥ 0u cumple lapropiedad de Markov si para cualesquiera estados o valores x0, x1, . . . , xn1
se cumple la identidad
P pXn1 xn1 |X0 x0, . . . , Xn xnq P pXn1 xn1 |Xn xnq.
De esta forma la probabilidad del evento futuro pXn1 xn1q solo dependedel evento pXn xnq, mientras que la informacion correspondiente al even-to pasado pX0 x0, . . . , Xn1 xn1q es irrelevante. Puede observarse

130 6. Procesos estocasticos
que mediante esta propiedad se esta especificando un tipo de dependenciaentre las variables aleatorias del proceso. La propiedad de Markov puedeextenderse sin dificultad al caso cuando el proceso es a tiempo continuo ydaremos los detalles mas adelante.
Procesos con incrementos independientes
Se dice que un proceso estocastico a tiempo continuo tXt : t ¥ 0u tieneincrementos independientes si para cualesquiera tiempos 0 ¤ t1 t2
tn, las variables aleatorias
Xt1 , Xt2 Xt1 , . . . , Xtn Xtn1
son independientes. Esto quiere decir que los desplazamientos que tiene elproceso en estos intervalos disjuntos de tiempo son independientes unos deotros. Cuando el proceso es a tiempo discreto la definicion es completamenteanaloga.
Procesos con incrementos estacionarios
Se dice que un proceso estocastico a tiempo continuo tXt : t ¥ 0u tiene in-crementos estacionarios si para cualesquiera tiempos s t, y para cualquierh ¡ 0, las variables aleatorias Xth Xsh y Xt Xs tienen la misma dis-tribucion de probabilidad. Es decir, el incremento que tiene el proceso entrelos tiempos s y t solo depende de estos tiempos a traves de la diferenciat s, y no de los valores especıficos de s y t. Cuando el proceso es a tiempodiscreto la definicion es nuevamente analoga.
Las propiedades generales de los procesos estocasticos que hemos menciona-do seran identificadas en los varios modelos estocasticos que veremos masadelante.
6.2. Filtraciones y tiempos de paro
Definiremos en esta seccion el concepto de filtracion y en particular definire-mos la filtracion generada por un proceso estocastico. Con estos elementosdefiniremos el concepto de tiempo de paro. Estos conceptos seran usados

6.2. Filtraciones y tiempos de paro 131
principalmente en los resultados que mencionaremos sobre martingalas, lascuales constituyen un tipo de proceso estocastico importante.
Definicion 6.2 Dado un espacio de probabilidad pΩ,F , P q, a una familiade sub σ-algebras pFtqt¥0 de F se le llama filtracion si para 0 ¤ s ¤ t, secumplen las contenciones
Fs Ft F .
Al espacio pΩ,F , P, pFtqt¥0q se le llama espacio de probabilidad filtrado.
El concepto de filtracion puede definirse de manera analoga tambien paratiempos discretos. En ese caso se escribe pFnqn¥0 y naturalmente la condi-cion de monotonıa es Fn Fm F para 0 ¤ n ¤ m. El concepto deadaptabilidad de un proceso estocastico respecto de una filtracion que seenuncia a continuacion tambien tiene su contraparte discreta.
Definicion 6.3 Se dice que un proceso a tiempo continuo tXt : t ¥ 0ues adaptado a una filtracion pFtqt¥0 si para cada t ¥ 0, la variable Xt esFt-medible.
Todo proceso estocastico tXt : t ¥ 0u determina una filtracion natural dadapor
Ft σtXs : 0 ¤ s ¤ tu, t ¥ 0.
No es difıcil ver que todo proceso es adaptado a su filtracion natural. Eneste caso a la σ-algebra Ft se le interpreta como la historia del proceso altiempo t, pues en ella se encuentran todos los posibles eventos o sucesos queel proceso haya tenido hasta ese momento.

132 6. Procesos estocasticos
Definicion 6.4 Un tiempo de paro respecto de una filtracion pFtqt¥0 esuna funcion τ : ΩÑ r0,8s tal que pτ ¤ tq P Ft para cada t ¥ 0.
Esto es, un tiempo de paro es una variable aleatoria no negativa, con posiblevalor infinito, tal que puede determinarse la ocurrencia o no ocurrencia delevento pτ ¤ tq solo con la informacion o historia del proceso hasta el tiempot. Por ejemplo, y sin entrar en mayores detalles tecnicos, el tiempo aleato-rio que transcurre hasta la ocurrencia de un cierto evento es un tiempo deparo, este tiempo aleatorio puede ser, por ejemplo, el tiempo que transcurrehasta la llegada de la n-esima reclamacion a una companıa aseguradora.Pueden definirse tambien tiempos de paro para filtraciones a tiempo discre-to de manera completamente analoga a la definicion anterior. Finalmentemencionaremos que un tiempo de paro τ es finito si P pτ 8q 0.
En las siguientes secciones estudiaremos muy brevemente algunos tipos deprocesos estocasticos que usaremos en la ultima parte del texto.
6.3. Caminatas aleatorias
Una caminata aleatoria simple sobre el conjunto de numeros enteros Z esun proceso estocastico a tiempo discreto tXn : n 0, 1, . . .u que evolucionade la siguiente forma: iniciando en el estado 0, al tiempo 1 el proceso puedepasar al estado 1 con probabilidad p, o al estado 1 con probabilidad q,en donde p q 1. Se usa la misma regla para los siguientes tiempos, esdecir, estando en el estado k, al siguiente instante el proceso pasa al estadok 1 con probabilidad p, o al estado k 1 con probabilidad q. El valor deXn es el estado donde se encuentra el proceso al tiempo n y puede escribirsecomo
Xn ξ1 ξ2 ξn,
en donde ξ1, ξ2, . . . es una sucesion de variables aleatorias independientescon identica distribucion
P pξ 1q p,
P pξ 1q q 1 p.

6.3. Caminatas aleatorias 133
n
Xnpωq
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
Figura 6.3
Una posible trayectoria de este proceso se muestra en la Figura 6.3 y es unode los mejores ejemplos para entender el caracter aleatorio en la dinamica deun proceso estocastico a lo largo del tiempo. La independencia de las varia-bles aleatorias ξ1, ξ2, . . . tiene como consecuencia que la caminata aleatoriasimple cumpla la propiedad de Markov y que sea un proceso estocasticocon incrementos independientes y estacionarios. En terminos generales elobjetivo es estudiar el comportamiento de la v.a. Xn al paso del tiempo.Uno de los elementos fundamentales para estudiar a las caminatas aleatoriasesta dado por las probabilidades de transicion. Para cualesquiera enteros iy j, las probabilidades de transicion en un paso de la caminata aleatoriasimple son:
P pXn1 j |Xn iq
$
&
%
p si j i 1,q si j i 1,0 otro caso.
Como estas probabilidades no dependen de n, se dice que son homogeneas enel tiempo, es decir, son las mismas para cualquier valor de n. Pueden consi-derarse tambien caminatas aleatorias que inician en cualquier valor entero oque permiten saltar de un estado en sı mismo al siguiente instante (es decir,no cambiar de estado), o bien, que los saltos no sean unitarios ni los tiemposen los que efectuan los saltos sean necesariamente tiempos enteros, e inclusopueden definirse caminatas en dimensiones mayores, por ejemplo, en Z
2. Lascaminatas aleatorias son procesos que pueden representar versiones discre-

134 6. Procesos estocasticos
tas de procesos a tiempo continuo mas complejos. En el siguiente capıtuloestudiaremos algunas caracterısticas de un proceso a tiempo discreto muysimilar a una caminata aleatoria que representara el balance de una asegu-radora. Para las caminatas aleatorias se pueden plantear diversos problemasmatematicos, por ejemplo, encontrar la distribucion de la variable Xn paracualquier valor de n, o encontrar la probabilidad de que en algun momentola caminata regrese a su posicion de origen, o que nunca tome valores nega-tivos, o alguna otra condicion interesante sobre sus trayectorias. En el textode Norris [26] o Resnick [29] se puede encontrar la solucion a algunos de estosproblemas, ası como un estudio mas completo sobre caminatas aleatorias.
6.4. Cadenas de Markov
Este tipo de procesos es tambien de amplia aplicacion y se cuenta con unateorıa matematica bastante desarrollada.
Definicion 6.5 Una cadena de Markov es un proceso estocastico a tiem-po discreto tXn : n 0, 1, . . .u con espacio de estados discreto y tal quesatisface la propiedad de Markov, esto es, para cualquier entero n ¥ 0 ycualesquiera estados x0, x1, . . . , xn1 se cumple la identidad
P pXn1 xn1 |Xn xn, . . . , X1 x1, X0 x0q
P pXn1 xn1 |Xn xnq.
A las probabilidades condicionales mencionadas en la definicion anterior seles llama probabilidades de transicion del tiempo n al tiempo n 1, y seles denota por pxn,xn1
pn, n 1q. Adicionalmente, se dice que la cadena esestacionaria u homogenea en el tiempo si estas probabilidades no dependenexplıcitamente de los tiempos particulares n y n1, sino unicamente de losestados involucrados. De esta forma, si de manera general se considera laprobabilidad de transicion del estado i al estado j de una unidad de tiempocualquiera a la siguiente unidad de tiempo, la probabilidad de transicion del
primer estado al segundo se escribe como pij , o pijp1q, o tambien como pp1q
ij ,

6.4. Cadenas de Markov 135
es decir, sin importar el valor del entero n:
pij P pXn j |Xn1 iq.
A estas probabilidades se les llama probabilidades de transicion en un paso.En general se considera como espacio de estados para una cadena de Markovel conjunto discreto t0, 1, . . .u o algun subconjunto finito de el. Haciendovariar los valores de los ındices i y j en este espacio de estados se forma lamatriz de probabilidades de transicion en un paso:
P
p00 p01 p02
p10 p11 p12
p20 p21 p22
......
...
Æ
Æ
Æ
.
En la entrada pi, jq de esta matriz aparece la probabilidad pij . Ası, todas lasentradas son numeros no negativos y la suma de ellos en cada renglon es 1. Atales matrices cuadradas se les llama matrices estocasticas. Recıprocamente,a partir de una matriz con estas caracterısticas junto con una distribucioninicial para X0, se puede construir una cadena de Markov. Es por ello quea una matriz estocastica tambien se le puede llamar cadena de Markov.La cadena puede iniciar en un estado particular o en cualquiera de ellosde manera aleatoria por medio de una distribucion de probabilidad inicialpπ0, π1, . . .q.
Probabilidades de transicion en n pasos
Uno de los problemas que se pueden plantear para las cadenas de Markov esel de encontrar las probabilidades de transicion de un estado a otro estadocualquiera en n pasos sucesivos. Estas probabilidades se definen como sigue
pijpnq P pXmn j |Xm iq.
Por la estacionariedad de las probabilidades de transicion en un paso, el ladoderecho de esta identidad no depende realmente del subındice m. La solu-cion al problema planteado se resuelve a traves de la igualdad de Chapman-Kolmogorov, la cual establece que para cualesquiera estados i y j y cua-lesquiera tiempos 0 ¤ r ¤ n,
pijpnq ¸
k
pikprq pkjpn rq.

136 6. Procesos estocasticos
De este modo la probabilidad de pasar del estado i al estado j en n pasosse descompone en la probabilidad de las distintas trayectorias que inicianen i y terminan en j, pero que al tiempo intermedio r visitan el estado k,sumando estas probabilidades sobre todos los posibles estados intermediosk. Cuando n 0 se define
pijp0q
"
1 si i j.
0 si i j.
Por lo tanto, aplicando la identidad de Chapman-Kolmogorov n 1 vecestomando siempre como tiempo intermedio r 1,
pijpnq pP P P qij pPnqij .
Es decir, la probabilidad buscada pijpnq es la entrada pi, jq de la matrizpotencia Pn. Ası, el problema de encontrar las probabilidades de transicionen n pasos se reduce al problema de calcular las potencias de la matriz deprobabilidades de transicion en un paso. Las cadenas de Markov son modelosampliamente conocidos y la propiedad de Markov hace que estos procesossean muy atractivos de estudiar, pues dicha propiedad hace que ciertasprobabilidades sean faciles de calcular, como por ejemplo las probabilidadespijpnq que acabamos de mencionar. Las cadenas de Markov con frecuenciaaparecen dentro de otros modelos estocasticos de interes teorico y aplicado.Por ejemplo, el proceso de riesgo a tiempo discreto que presentaremos enel siguiente capıtulo resulta ser una cadena de Markov. En los textos deKarlin y Taylor [20] o Norris [26] el lector puede encontrar una exposicionmuy detallada de las cadenas de Markov.
Distribuciones discretas tipo fase
En esta seccion definiremos un tipo de distribucion de probabilidad discretaque surge a traves de una cadena de Markov. Para ello, la siguiente carac-terıstica sera de interes.

6.4. Cadenas de Markov 137
Definicion 6.6 Se dice que el estado i de una cadena de Markov es ab-sorbente si
pii 1.
En caso contrario se dice que el estado es no absorbente.
Esto quiere decir que si en algun momento la cadena visita un estado ab-sorbente, el proceso permanece en dicho estado el resto del tiempo. Con-sideremos entonces una cadena de Markov tXn : n ¥ 0u con espacio deestados t0, 1, 2, . . . , ku, en donde el estado 0 es absorbente y los estados1, 2, . . . , k son no absorbentes. Esta cadena tiene una matriz de probabilida-des de transicion en un paso compuesta por cuatro bloques de la siguienteforma:
P
1 0bT B
,
en donde 0 es el vector renglon p0, 0, . . . , 0q de dimension k, b es el vectorrengon pb1, b2, . . . , bkq con no todas sus entradas cero en donde el superındiceT indica transpuesta y B es una matriz cuadrada de k k tal que la matrizcompleta es estocastica. Esta ultima condicion se puede expresar mediantela ecuacion
bT BeT eT , (6.1)
en donde e representa el vector renglon p1, 1, . . . , 1q de dimension k. Laidea es dejar que la cadena inicie en alguno de los estados no absorbentes1, 2, . . . , k o bien a traves de una distribucion inicial π pπ1, π2, . . . , πkq
sobre esos estados y observar el momento aleatorio τ (posiblemente infinito)en el que el proceso es atrapado en el estado absorbente 0. Esta variablealeatoria resulta ser un tiempo de paro y a la distribucion de probabilidadde este tiempo de espera hasta la absorcion se le llama distribucion tipo fase.Mas generalmente, tomaremos como distribucion de probabilidad inicial alvector
π1 pπ0, π1, . . . , πkq,
en donde π0 es la probabilidad de que la cadena inicie en el estado absorbente

138 6. Procesos estocasticos
0 y el subvectorπ pπ1, π2, . . . , πkq
denota entonces el vector inicial cuyas entradas son las probabilidades ini-ciales de los estados no absorbentes. Cuando π0 0 el vector π es efec-tivamente una distribucion de probabilidad. Cuando π0 ¡ 0, se tiene queP pτ 0q π0 ¡ 0. Puesto que, partiendo de un estado no absorbente,es posible hacer varias transiciones entre los estados no absorbentes antesde la absorcion, en las formulas relacionadas con esta distribucion tipo faseaparece el subvector π y no el vector completo π1.
Definicion 6.7 A la distribucion de probabilidad de la variable aleatoria τ
definida porτ mın tn ¥ 0 |Xn 0u
se le llama distribucion tipo fase discreta con subdistribucion inicial π ysubmatriz de transicion B. Esto se escribe
τ PHpπ,Bq.
La notacion PH para la distribucion del tiempo de absorcion proviene delas primeras letras del termino en ingles phase. En general no parece facilencontrar la distribucion de probabilidad del tiempo de absorcion τ , sinembargo, como veremos mas adelante, existen formulas matriciales sorpren-dentemente cortas para ciertas caracterısticas de τ que facilitan el calculode probabilidades con este tipo de distribuciones. Antes de mencionar estasformulas veamos el ejemplo mas sencillo de distribucion discreta tipo fase.
Ejemplo 6.1 (Distribucion geometrica) Considere la cadena de MarkovtXn : n ¥ 0u con dos estados: un estado absorbente 0 y un estado no ab-sorbente 1. La matriz de probabilidades de transicion en un paso es
P
1 0p 1 p
.
Suponga que la cadena empieza en el estado 1. No es difıcil comprobar que

6.4. Cadenas de Markov 139
la distribucion del tiempo de absorcion τ es geoppq, esto es,
P pτ nq p1 pqn1 p n 0, 1, 2, . . .
Si se postula como distribucion inicial a π1 pπ0, π1q p1 θ, θq sobre latotalidad de los estados t0, 1u con 0 θ 1, entonces la distribucion de τ
es
P pτ nq
"
1 θ si n 0,θp1 pqn1 p si n ¥ 1.
Concluimos esta seccion mencionando algunas formulas generales sobre lasdistribuciones tipo fase discretas. Mas adelante veremos este mismo tipo dedistribuciones en su version continua.
a) Usando la identidad (6.1) y el metodo de induccion, se puede de-mostrar que la matriz de probabilidades de transicion en n ¥ 1 pasoses
Pn
1 0eT Bn eT Bn
.
b) Partiendo de un estado no absorbente i, la probabilidad de estar enel estado no absorbente j despues de n 1 pasos y en el siguientepaso llegar al estado absorbente es, por la ecuacion de Chapman-Kolmogorov,
πi pBn1
qij bTj .
Sumando sobre los valores de los ındices i y j se obtiene la funcion deprobabilidad del tiempo de absorcion τ :
fpnq
"
π0 si n 0,π Bn1 bT si n ¥ 1.
c) La funcion de distribucion del tiempo de absorcion τ es
F pnq P pτ ¤ nq 1 P pτ ¡ nq,
en donde P pτ ¡ nq es la probabilidad de que al tiempo n la cadena nose encuentre en el estado absorbente. La probabilidad de pasar del es-tado no absorbente i al estado no absorbente j en n pasos es πi pB
nqij .

140 6. Procesos estocasticos
La suma sobre i y sobre j no absorbentes de estas probabilidades sepuede escribir como π Bn eT . Por lo tanto,
F pnq
"
π0 si n 0,1 π Bn eT si n ¥ 1.
6.5. Proceso de Poisson
En esta seccion recordaremos la definicion y algunos aspectos elementalesde uno de los procesos estocasticos de mayor importancia: el proceso dePoisson.
Definicion 6.8 Un proceso estocastico de tiempo continuo tNt : t ¥ 0u conespacio de estados el conjunto discreto t0, 1, . . .u es un proceso de Poissonde parametro o intensidad λ ¡ 0 si cumple las siguientes propiedades:
a) N0 0.
b) Tiene incrementos independientes.
c) La variable incremento NtsNs tiene distribucion Poissonpλtq, paracualesquiera s ¥ 0, t ¡ 0.
Observe que la tercera propiedad establece implıcitamente que los incre-mentos del proceso de Poisson son estacionarios, pues la distribucion deNts Ns no depende de s. El proceso de Poisson se utiliza para modelarsituaciones de conteo de ocurrencias de un evento particular en un intervalode tiempo dado. Por ejemplo, Nt puede representar el numero de llamadasrecibidas en un numero telefonico de emergencias, o el numero de accidentesocurridos en un cierto lugar o el numero de clientes que buscan un serviciodurante el intervalo de tiempo r0, ts. En particular, tomando s 0 en la ter-cera propiedad en la definicion, se tiene que la variable Nt tiene distribucionPoissonpλtq para cualquier t ¥ 0. Esto es
P pNt nq eλt pλtqn
n!, n 0, 1, 2, . . .

6.5. Proceso de Poisson 141
Por lo tanto,
EpNtq λt,
y VarpNtq λt.
Ası, para cada tiempo t desconocemos el valor que toma Nt, pero sabemosque Nt tiene distribucion Poissonpλtq. En nuestro caso, usaremos el procesode Poisson para modelar el numero de reclamaciones que llegan a una com-panıa aseguradora hasta un tiempo t cualquiera. Una posible trayectoria deun proceso de Poisson se muestra en la Figura 6.4.
1
2
3
b bc
b bc
b bc
b
t
Ntpωq
Figura 6.4
Tiempos de estancia exponenciales
No resulta evidente a partir de la definicion que hemos dado del proceso dePoisson, pero la dinamica de este proceso es la siguiente: el proceso empiezaen el estado cero y permanece en ese estado un tiempo aleatorio exponencialde parametro λ, brinca despues al estado uno y nuevamente permaneceen ese nuevo estado otro tiempo exponencial con el mismo parametro eindependiente del tiempo de estancia anterior, despues brinca al estado dosy ası sucesivamente. Es por ello que una posible trayectoria de este procesotiene las caracterısticas que se muestran en la Figura 6.4: saltos unitarioshacia arriba y tiempos de estancia exponenciales. De este modo puedendefinirse las variables T1, T2, . . . como los tiempos que transcurren entre unsalto y el siguiente. A tales variables aleatorias se les llama tambien tiemposde interarribo. En el siguiente resultado que enunciamos sin demostracion,se muestra la relacion entre la propiedad de Markov del proceso de Poissony los tiempos de estancia exponenciales.

142 6. Procesos estocasticos
Proposicion 6.1 La propiedad de Markov del proceso de Poisson impli-ca que los tiempos de estancia T1, T2, . . . son independientes y cada unode ellos tiene distribucion exponencial. Recıprocamente, dada una sucesionde v.a.s independientes T1, T2, . . . con identica distribucion exponencial, elproceso de conteo que puede construirse a partir de esta sucesion cumple lapropiedad de Markov.
Perdida de memoria y sus consecuencias
Una de las propiedades que caracterizan de manera unica a la distribucionexponencial dentro del conjunto de distribuciones absolutamente continuases que satisface la propiedad de perdida de memoria, esto es, si T tienedistribucion exppλq, entonces para cualesquiera tiempos s, t ¡ 0 se cumplela igualdad
P pT ¡ t s |T ¡ sq P pT ¡ tq.
En otras palabras, condicionada al evento pT ¡ sq, la variable T s sigueteniendo distribucion exppλq. Esto significa que, para un valor de s ¥ 0fijo, todos los tiempos de interarribo a partir de s, incluyendo el primero,siguen teniendo distribucion exppλq, y por lo tanto el proceso de conteode eventos a partir del tiempo s es nuevamente un proceso de Poisson. Aesta propiedad se le conoce como la propiedad de renovacion del proceso dePoisson. La situacion se muestra graficamente en la Figura 6.5.
1
2
3
1
2
b bc
b bc
b bc
b
t
Nt
b t
Mt
s
Figura 6.5

6.6. Cadenas de Markov a tiempo continuo 143
Por lo tanto, tenemos el siguiente resultado.
Proposicion 6.2 Si tNt : t ¥ 0u es un proceso de Poisson de parametroλ, entonces para cualquier s ¥ 0, el proceso dado por Mt Nts Ns esnuevamente un proceso de Poisson con el mismo parametro.
Observemos que la propiedad de renovacion se cumple tambien en los mo-mentos en los que el proceso de Poisson tiene saltos, es decir, si empezamosa estudiar al proceso a partir del momento en el que se observa un salto, esenuevo proceso es tambien un proceso de Poisson con el mismo parametro.Desde el punto de vista matematico esta propiedad sera de mucha utili-dad cuando estudiemos modelos en donde las reclamaciones que reciba unaaseguradora sigan un proceso de Poisson.
Otras definiciones equivalentes del proceso de Poisson y algunos otros re-sultados sobre sus propiedades se pueden encontrar en [31].
6.6. Cadenas de Markov a tiempo continuo
Este tipo de procesos es una generalizacion del proceso de Poisson menciona-do en la seccion anterior. Ahora los saltos del proceso no son necesariamenteunitarios hacia arriba sino que el proceso puede saltar a cualquier otro es-tado distinto del estado desde donde salta. Una trayectoria de este tipo deprocesos se muestra en la Figura 6.6.Vamos entonces a definir cadenas de Markov en donde el tiempo es continuoy las variables toman valores enteros. Consideremos un proceso a tiempocontinuo tXt : t ¥ 0u que inicia en un estado i1 al tiempo cero. El procesopermanece en ese estado un tiempo aleatorio Ti1 , y despues salta a un nuevoestado i2 distinto del anterior. El sistema permanece ahora en el estado i2un tiempo aleatorio Ti2 al cabo del cual brinca a otro estado i3 distinto delinmediato anterior, y ası sucesivamente. Los tiempos aleatorios T son lostiempos en los que el proceso permanece constante en alguno de sus estados,y se llaman tiempos de estancia (passage times). Los momentos en dondeel proceso tiene saltos son los tiempos Wn Ti1 Tin , para n ¥ 1. El

144 6. Procesos estocasticos
Ti1
i1
Ti2
i2
Ti3
i3
Ti4
i4
b bc
b bc
b bc
b
t
Xtpωq
Figura 6.6
proceso puede entonces escribirse en la forma siguiente:
Xt
$
'
'
'
&
'
'
'
%
i1 si 0 ¤ t W1,
i2 si W1 ¤ t W2,
i3 si W2 ¤ t W3,...
A un proceso de estas caracterısticas se llama proceso de saltos, y resultaser una buena version continua de las cadenas de Markov a tiempo discreto,pero es necesario requerir de algunas otras condiciones. Supondremos que
lımnÑ8
Wn 8 c.s.
y ello garantiza que para todo t ¥ 0, el valor de Xt es finito, c.s. Por otrolado, sin perdida de generalidad supondremos que el espacio de estados esel conjunto S t0, 1, . . .u y que el tiempo de estancia asociado el estadoi es la variable aleatoria Ti, la cual supondremos positiva con funcion dedistribucion Fiptq. Como en el caso de cadenas a tiempo discreto, se deno-tara por pij a la probabilidad de que la cadena pase del estado i al estadoj al efectuar un salto. Adicionalmente impondremos la condicion pii 0, ycon ello se imposibilita que la cadena salte al mismo estado de partida. Lasprobabilidades de saltos deben entonces satisfacer las siguientes condiciones:
a) pij ¥ 0.

6.6. Cadenas de Markov a tiempo continuo 145
b) pii 0.
c)¸
j
pij 1.
En forma de matriz, las probabilidades de saltos constituyen una matrizestocastica de la siguiente forma:
P
0 p01 p02
p10 0 p12
p20 p21 0
......
...
Æ
Æ
Æ
.
Supondremos ademas que los tiempos de estancia Ti1 , Ti2 , . . . son indepen-dientes entre sı, y tambien son independientes del mecanismo mediante elcual se escoge el estado j al cual la cadena salta despues de estar en cualquierotro estado i. Mas aun, supondremos que cada variable Ti es finita con pro-babilidad 1, o bien, es infinita con probabilidad 1. En el primer caso se diceque el estado i es no absorbente, y en el segundo caso que es absorbente. Elhecho de que Ti 8 se interpreta en el sentido de que el proceso deja desaltar y permanece en el estado i el resto del tiempo, es decir, el estado i
es absorbente. Por lo tanto, solo hay dos tipos de estados: absorbentes o noabsorbentes. En otras palabras, con probabilidad uno el tiempo de estanciaes finito o con probabilidad uno es infinito. Por otra parte, un resultado notrivial establece que un proceso de las caracterısticas arriba especificadassatisface la propiedad de Markov si y solo si, los tiempos de estancia en losestados no absorbentes tienen distribucion exponencial. Este es un resultadoimportante cuya demostracion omitiremos y que simplifica drasticamenteel modelo general planteado. Como deseamos estudiar procesos de saltosque cumplan la propiedad de Markov, pues tal propiedad ayuda a calcularprobabilidades con cierta facilidad, tendremos que suponer entonces que eltiempo de estancia en un estado no absorbente i tiene distribucion exppλiq,con λi ¡ 0, es decir,
Fiptq 1 eλit para t ¡ 0.
Observe que puede considerarse que λi 0 en el caso cuando Ti 8.La propiedad de Markov que consideraremos tiene la siguiente forma: para

146 6. Procesos estocasticos
cualesquiera tiempos 0 ¤ t1 t2 tn,
ppXtn xtn |Xt1 xt1 , . . . , Xtn1 xtn1
q ppXtn xtn |Xt1 xt1q.
Supondremos nuevamente que estas probabilidades de transicion son esta-cionarias en el tiempo, esto significa que para cada s ¥ 0 y t ¥ 0, se cumplela identidad
P pXts j |Xs iq P pXt j |X0 iq,
es decir, no hay dependencia del valor de s. Esta probabilidad se escribe demanera breve mediante la expresion pijptq, para i y j enteros no negativos,es decir,
pijptq P pXts j |Xs iq P pXt j |X0 iq.
En particular para t 0 se define pijp0q como la funcion delta de Kronecker,es decir,
pijp0q δij
"
1 si i j,
0 si i j.
Haciendo variar los ındices i y j en el espacio de estados se obtiene la matrizde probabilidades de transicion al tiempo t, que denotaremos por Pt y enocasiones se escribe tambien como P ptq:
Pt ppijptqq
p00ptq p01ptq
p10ptq p11ptq
......
Æ
.
Puede demostrarse que cuando el espacio de estados es finito, esta matrizes siempre estocastica, es decir, los elementos de cada renglon suman 1.
Definicion 6.9 A un proceso de saltos con las caracterısticas y postuladosarriba senalados se le llama cadena de Markov a tiempo continuo.
Observe que en un proceso de Markov a tiempo continuo las probabilidadesde saltos pij y las probabilidades de transicion pijptq representan aspectos

6.6. Cadenas de Markov a tiempo continuo 147
distintos del proceso. Las primeras son probabilidades de cambio al estadoj cuando el proceso se encuentra en el estado i y el proceso tiene un salto,mientras que las segundas son probabilidades de encontrar al proceso en elestado j, partiendo de i, al termino de un intervalo de tiempo de longitud t.Observe ademas que un proceso de Markov a tiempo continuo queda comple-tamente especificado por los siguientes tres elementos: una distribucion deprobabilidad inicial en el espacio de estados, el conjunto de los parametrosno negativos λi, y las probabilidades de saltos pij .
Ejemplo 6.2 (Proceso de Poisson) El proceso de Poisson es una cadenade Markov a tiempo continuo que empieza en cero, es decir, la distribucionde probabilidad inicial tiene el valor 1 en el estado cero. Los tiempos deestancia son exponenciales de parametro λ y las probabilidades de saltos deun estado a otro son
pij
"
1 si j i 1,0 si j i 1.
Las probabilidades de transicion son
pijptq
#
eλt pλtqji
pjiq!si j ¥ i,
0 otro caso.
Ejemplo 6.3 (Cadena de dos estados) Considere el proceso tXt : t ¥ 0ucon espacio de estados t0, 1u y definido por la siguiente dinamica: cuandoel proceso entra al estado 0 permanece en el un tiempo exppλq y luego vaal estado 1, entonces permanece en el estado 1 un tiempo exppµq y despuesregresa a 0, y ası sucesivamente. Se postula ademas que los tiempos deestancia en cada estado son variables aleatorias independientes. Para esteproceso pueden encontrarse explıcitamente las probabilidades de transicionpijptq. Puede demostrarse que para cualquier t ¥ 0,
p00ptq
µ
λ µ
λ
λ µepλµqt.

148 6. Procesos estocasticos
En consecuencia, por complemento o simetrıa,
p01ptq
λ
λ µ
λ
λ µepλµqt,
p11ptq
λ
λ µ
µ
λ µepλµqt,
p10ptq
µ
λ µ
µ
λ µepλµqt.
En notacion matricial,
p00ptq p01ptq
p10ptq p11ptq
1
λ µ
µ λ
µ λ
1
λ µ
λ λ
µ µ
epλµqt.
Probabilidades de transicion
Hemos mencionado antes que para una cadena de Markov a tiempo continuolas probabilidades de transicion son los numeros pijptq P pXt j |X0 iq.El problema que puede plantearse es el de encontrar una expresion para lasprobabilidades de transicion pijptq para cada par de estados i y j, y paracada tiempo t ¥ 0. Este es un problema demasiado general y solo en algunospocos casos es posible encontrar explıcitamente tales probabilidades. Losanteriores dos ejemplos son casos muy sencillos en donde es posible encontrarlas probabilidades pijptq.
El generador infinitesimal
A partir de los parametros λi y pij de una cadena de Markov a tiempocontinuo se pueden definir las cantidades gij de la siguiente forma:
gij
"
λi si i j,
λi pij si i j.
A estos numeros se les conoce con el nombre de parametros infinitesimalesdel proceso. Haciendo variar los ındices i y j, estos nuevos parametros con-forman una matriz G llamada el generador infinitesimal del proceso deMarkov, es decir,
G
λ0 λ0p01 λ0p02
λ1p10 λ1 λ1p12
λ2p20 λ2p21 λ2
......
...
Æ
Æ
.

6.6. Cadenas de Markov a tiempo continuo 149
Puede demostrarse que el generador infinitesimal caracteriza de maneraunica a la cadena de Markov. Ası, a esta misma matriz se le llama a vecescadena de Markov a tiempo continuo, y es el concepto equivalente a la matrizde probabilidades de transicion en un paso para cadenas a tiempo discreto.Se trata de una matriz con las siguientes propiedades:
a) gij ¥ 0, si i j.
b) gii ¤ 0.
c)¸
j
gij 0.
Ejemplo 6.4 El generador infinitesimal para el proceso de Poisson de pa-rametro λ es
G
λ λ 0 0
0 λ λ 0
0 0 λ λ
......
...
Æ
Æ
Æ
. (6.2)
Ejemplo 6.5 El generador infinitesimal para la cadena de Markov de dosestados del Ejemplo 6.3 es
G
λ λ
µ µ
. (6.3)
Ecuaciones de Kolmogorov
Puede demostrarse que las probabilidades de transicion pijptq satisfacen elsistema de ecuaciones diferenciales dado por
p1ijptq ¸
k
gik pkjptq, t ¥ 0.
Observe que se tiene una ecuacion diferencial para cada par ordenado deestados pi, jq. En terminos de matrices la igualdad anterior se escribe
P 1
ptq GP ptq.
A este sistema de ecuaciones diferenciales se le conoce como las ecuacionesretrospectivas de Kolmogorov.

150 6. Procesos estocasticos
Ejemplo 6.6 (Proceso de Poisson) El sistema de ecuaciones retrospec-tivas de Kolmogorov para el proceso de Poisson de parametro λ esta dadopor
p1iiptq λpiiptq
p1ijptq λpijptq λpi1,jptq para i j.
Y sabemos que la solucion es pijptq eλtpλtqji
pj iq! para i ¤ j.
Ejemplo 6.7 (Cadena de dos estados) El sistema de ecuaciones retros-pectivas de Kolmogorov para la cadena de Markov de dos estados definidaen el Ejemplo 6.3 esta dado por
p100ptq λ p00ptq λ p10ptq,
p101ptq λ p01ptq λ p11ptq,
p110ptq µ p10ptq µ p00ptq,
p111ptq µ p11ptq µ p01ptq.
Pueden resolverse estas ecuaciones y encontrar las expresiones que fueronenunciadas anteriormente.
Al sistema de ecuaciones diferenciales dado por la igualdad P 1
ptq P ptqG sele llama sistema de ecuaciones prospectivas de Kolmogorov. La diferenciaentre este sistema y el sistema retrospectivo mencionado antes es que elorden de los factores en el lado derecho es distinto. Mas explıcitamente, elsistema prospectivo es el siguiente
p1ijptq ¸
k
pikptq gkj .
En algunos casos los dos sistemas de ecuaciones son equivalentes y su solu-cion produce las mismas probabilidades de transicion pijptq. En general, elsistema retrospectivo es el que siempre se satisface.Los procesos de nacimiento y muerte son un tipo particular importantede cadena de Markov a tiempo continuo. Este tema y una exposicion masdetallada sobre este tipo de proceso estocastico puede ser encontrada, porejemplo, en el texto de Hoel, Port y Stone [19], en Basu [3], en Karlin yTaylor [20] o en Rolski et al. [32]. Concluimos esta seccion definiendo un tipo

6.6. Cadenas de Markov a tiempo continuo 151
de distribucion de probabilidad que surge a partir de cadenas de Markov atiempo continuo con espacio de estados finito y que permiten encontrar unaformula para la probabilidad de ruina en un modelo de riesgo cuando lasreclamaciones tienen este tipo de distribuciones. Estudiaremos esta formulaen la ultima parte del texto.
Distribuciones continuas tipo fase
Definiremos ahora las distribuciones tipo fase, las cuales tambien se puedendefinir a partir de ciertas cadenas de Markov a tiempo continuo. Sea tXt :t ¥ 0u una cadena de Markov a tiempo continuo con espacio de estadost0, 1, 2, . . . , ku en donde el estado 0 es absorbente y los estados 1, 2, . . . , kson no absorbentes. Suponga que el generador infinitesimal de esta cadenaes de la forma:
G
0 0bT B
,
en donde nuevamente 0 es el vector renglon p0, 0, . . . , 0q de dimension k, bes el vector rengon pb1, b2, . . . , bkq con no todas sus entradas cero y B esuna matriz cuadrada de k k tal que la matriz completa G es un genera-dor infinitesimal. A la matriz B se le llama matriz de subintensidades. Enparticular,
bT BeT 0T , (6.4)
en donde e es el vector renglon p1, 1, . . . , 1q de dimension k. Supondremosque la cadena inicia en cualquiera de sus estados, incluyendo el estado ab-sorbente, a traves de una distribucion de probabilidad inicial
π1 pπ0, π1, . . . , πkq.
Y nuevamente denotaremos por π al subvector cuyas entradas correspondena la distribucion de probabilidad inicial para estados no absorbentes.
π pπ1, π2, . . . , πkq.
Cuando π0 0 el subvector π es efectivamente una distribucion de probabi-lidad. Si la cadena inicia en alguno de sus estados no absorbentes, entoncesvisitara estados absorbentes un tiempo aleatorio exponencial en cada de uno

152 6. Procesos estocasticos
de ellos y despues posiblemente quedara atrapado en el estado absorbente0. La idea es la misma que fue expresada en el caso de cadenas de Markova tiempo discreto. La diferencia radica en que ahora el tiempo es continuo.A la distribucion de probabilidad del tiempo de espera hasta la absorcionse le llama nuevamente distribucion tipo fase.
Definicion 6.10 A la distribucion de probabilidad de la variable aleatoriaτ definida por
τ ınf tt ¥ 0 |Xt 0u
se le llama distribucion continua tipo fase con subdistribucion inicial π ymatriz de subintensidades B. Esto se escribe
τ PHpπ,Bq.
Hemos usado aquı la misma notacion para las distribuciones tipo fase dis-cretas y continuas. El contexto o especificacion del modelo determinara sinambiguedad si es de un tipo o del otro. Por otro lado, en algunos textos seconsidera que la totalidad de estados es t1, 2, . . . , k 1u en donde el esta-do k 1 es absorbente y el resto de los estados es no absorbente. Ambosmodelos son equivalentes.
Ejemplo 6.8 (Distribucion Erlang) Sea λ ¡ 0 fijo. Considere la cadenade Markov a tiempo continuo tXt : t ¥ 0u con k 1 estados: un estadoabsorbente 0 y k estados no absorbentes 1, 2, . . . , k. Suponga que el generadorinfinitesimal es de la forma:
G
0 0 0 0 00 λ λ 0 00 0 λ λ 00 0 0 λ 0...
......
.... . .
...λ 0 0 0 λ
Æ
Æ
Æ
Æ
Æ
Æ
Æ
.
Suponga ademas que X0 1. Ası, la cadena inicia en el estado 1 y per-manece en dicho estado un tiempo exponencial de parametro λ, al termino

6.6. Cadenas de Markov a tiempo continuo 153
de este tiempo la cadena salta al estado 1 y permanece allı otro tiempoexponencial de parametro λ e independiente del primero, y ası sucesiva-mente hasta llegar al ultimo estado transitorio k. Despues de estar en esteultimo estado un tiempo exponencial, la cadena finalmente salta al estadoabsorbente 0 y permanece allı el resto del tiempo. Es claro que el tiempo deabsorcion τ tiene distribucion Erlangpk, λq pues es la suma de k variablesaleatorias independientes con distribucion exponencial de parametro λ. Porlo tanto la funcion de densidad de τ es
fptq pλtqk1
pk 1q!λt eλt, t ¡ 0.
En particular, cuando unicamente hay un estado transitorio, es decir, k 1,se obtiene la distribucion exponencial.
Del mismo modo que lo hicimos en el caso discreto, mencionaremos ahoraalgunas formulas que se conocen para las distribuciones tipo fase continuas.Las demostraciones de estas propiedades y algunas otras pueden encontrarseen Rolski et al. [32]. Recordemos que la funcion exponencial de una matrizcuadrada A de dimension finita se define mediante la serie de potencias deTaylor:
eA :8
¸
n0
1
n!An.
a) Para cada t ¥ 0,
P pτ ¡ tq π0 π r exp tB s eT . (6.5)
b) Si π0 0 y la matriz B es no singular, entonces τ tiene funcion dedensidad
fptq π r exp tB s bT , t ¡ 0.
c) Si la matriz B es no singular, entonces para cada n ¥ 1,
Epτnq p1qn n!π pB1q
n eT .
Ejemplo 6.9 (Distribucion Erlang) Considere nuevamente la situaciondel Ejemplo 6.8 en donde el tiempo de absorcion tiene distribucion Erlangpk, λq.

154 6. Procesos estocasticos
El estado inicial es X0 1 y por lo tanto π0 0. Entonces la matriz desubintensidades B es no singular y tiene la forma
B
λ λ 0 00 λ λ 00 0 λ 0...
......
. . ....
0 0 0 λ
Æ
Æ
Æ
Æ
Æ
kk
.
Las formulas arriba mencionadas se reducen a las expresiones conocidaspara la distribucion Erlangpk, λq, es decir,
a) P pτ ¡ tq
k1
n1
eλt pλtqn
n!, t ¡ 0.
b) fptq pλtqk1
pk 1q!λt eλt, t ¡ 0.
c) Epτnq pn k 1q!
λnpk 1q!
, n ¥ 1.
Estas expresiones se reducen aun mas en el caso exponencial cuando k 1.
En la ultima parte de este texto usaremos las distribuciones tipo fase paramodelar los montos de las reclamaciones y aprovecharemos sus propiedadescomputacionales para encontrar una formula para la probabilidad de rui-na en un modelo de riesgo a tiempo continuo. En particular haremos usode la formula (6.5). Se puede encontrar mayor informacion sobre las dis-tribuciones tipo fase, incluyendo las demostraciones de los resultados arribaenunciados, en el texto de Rolski et al. [32]. En el artıculo de Bladt [5] puedetambien encontrarse una excelente exposicion sobre el uso y aplicacion delas distribuciones tipo fase en la teorıa del riesgo.
6.7. Martingalas
Las martingalas son un tipo de proceso estocastico que aparece con frecuen-cia tanto en la teorıa general de procesos como en las aplicaciones. Algunos

6.7. Martingalas 155
resultados desarrollados para martingalas nos seran de utilidad para pre-sentar una forma de resolver ciertos problemas de la teorıa de la ruina. Lasiguiente es la definicion de martingala, la cual puede tambien enunciarsepara tiempos discretos.
Definicion 6.11 Un proceso a tiempo continuo tXt : t ¥ 0u que es adap-tado a una filtracion pFtqt¥0 y que es integrable, es decir, cada variable queconforma el proceso tiene esperanza finita, se llama una martingala si para0 ¤ s ¤ t se cumple
EpXt |Fsq Xs c.s. (6.6)
La identidad (6.6) establece un tipo de dependencia probabilıstica parti-cular entre las variables aleatorias que conforman una martingala. Este esentonces otro ejemplo de proceso estocastico. En el Apendice se encuentrauna revision breve de la definicion y algunas propiedades de la esperanzacondicional como la que aparece en (6.6). Las martingalas son procesos queestan relacionados con los juegos justos. Por ejemplo, si la variable Xt re-presenta la fortuna de un jugador al tiempo t, y quien supondremos apuestade manera continua, entonces la igualdad anterior se interpreta del siguientemodo: en promedio la fortuna del jugador al tiempo t dada toda la historiadel juego hasta el tiempo s anterior a t es la fortuna del jugador al tiem-po s, es decir, el juego es justo pues el jugador en promedio no pierde nigana. Cuando en lugar de (6.6) se cumple EpXt |Fsq ¤ Xs se dice que elproceso es una supermartingala, se trata entonces de un juego desfavorableal jugador pues en promedio su fortuna disminuye. En caso de la desigual-dad contraria el proceso es una submartingala, juego favorable al jugador.Cuando se toma esperanza en la ecuacion (6.6) se obtiene
EpXtq EpXsq,
para 0 ¤ s ¤ t. Esto quiere decir que todas las variables aleatorias queconforman una martingala tienen la misma esperanza. En particular, si lavariable inicial X0 es cero o su esperanza es cero, entonces EpXtq 0 paracualquier t ¥ 0. Algunos ejemplos sencillos de martingalas aparecen enla seccion de ejercicios. Finalmente enunciaremos un resultado de la teorıa

156 6. Procesos estocasticos
general de martingalas que sera usado en la ultima parte del curso. Recuerdela notacion x^ y mıntx, yu.
Teorema 6.1 (Teorema de paro de martingalas). Sea tXt : t ¥ 0uuna martingala y sea τ un tiempo de paro, ambos respecto de una filtracionpFtqt¥0. Entonces tXt^τ : t ¥ 0u es tambien una martingala, es decir, paracualesquiera 0 ¤ s ¤ t,
EpXt^τ |Fsq Xs^τ c.s.
La demostracion de este resultado puede encontrarse en [30] o [39]. En elsiguiente capıtulo usaremos la teorıa de martingalas para estimar la proba-bilidad de ruina en el modelo clasico de Cramer-Lundberg.
Comentarios y referencias
Como preparacion para los modelos dinamicos de riesgo que estudiaremos enlos siguientes capıtulos, hemos presentado aquı algunos conceptos elemen-tales de los procesos estocasticos, ası como algunos ejemplos particularesde este tipo de modelos matematicos. Para mayor informacion sobre estostemas el lector puede consultar cualquiera de los textos sobre procesos es-tocasticos que aparecen en la bibliografıa, por ejemplo, Basu [3], Hoel etal. [19], Karlin y Taylor [20], Resnick [29] y Stirzaker [37].
6.8. Ejercicios
Caminatas aleatorias
136. Para la caminata aleatoria simple tXn : n ¥ 0u sobre Z demuestreque para n ¥ 1:
a) EpXnq npp qq.
b) VarpXnq 4npq.
c) EpetXnq ppet qet
q
n.

6.8. Ejercicios 157
Cadenas de Markov
137. Considere una cadena de Markov tXn : n ¥ 0u con espacio deestados t0, 1, 2u y con matriz de probabilidades de transicion
P
13 13 1323 0 1314 12 14
.
Suponga X0 0. Calcule:
a) P pX2 1q.
b) P pX5 1 |X3 2q.
Ahora suponga que X0 tiene distribucion p15, 12, 310q. Calcule:
c) P pX2 1 |X1 0q.
d) P pX3 0q.
138. Para la cadena de Markov tXn : n ¥ 0u con espacio de estadost0, 1, 2, 3, 4u con distribucion inicial π p15, 15, 15, 15, 15q ymatriz de probabilidades de transicion
P
0 13 13 13 023 0 0 0 130 14 12 14 025 0 25 0 1512 0 0 0 12
Æ
Æ
Æ
Æ
,
calcule:
a) P pX0 0, X1 1, X2 1, X3 4, X4 1q.
b) P pX101 3 |X100 3q.
c) P pX0 X1q.
d) P p|X1 X0| ¤ 1q.
e) P pX1 0, X3 0q.

158 6. Procesos estocasticos
139. Suponga que tXn : n ¥ 0u es una cadena de Markov con espacio deestados t0, 1u y con matriz de probabilidades de transicion
P
12 12110 910
.
El estado 0 representa no contar con un seguro de vida y el es-tado 1 corresponde a tener algun seguro de vida. La dinamica decontratar o no contratar un seguro de vida para cada persona enperiodos sucesivos de tiempo esta dada por la cadena de Markov.Si inicialmente la mitad de la poblacion esta asegurada, calcule elporcentaje de la poblacion que estara asegurada en los periodos 1,2 y 3 por separado.
Proceso de Poisson
140. Suponga que las llegadas de reclamaciones a una companıa asegu-radora siguen un proceso de Poisson de intensidad λ 5, en dondela unidad de tiempo es un dıa, es decir, en promedio llegan 5 recla-maciones por dıa. Calcule la probabilidad de que:
a) No se reciba ninguna reclamacion en un dıa cualquiera.
b) Se reciban mas de 10 reclamaciones en un dıa cualquiera.
c) Se reciba una sola reclamacion en los siguientes tres dıas.
141. Los clientes ingresan a un establecimiento de acuerdo a un procesode Poisson a razon de 10 clientes por hora en promedio. Calcule laprobabilidad de que:
a) En una hora cualquiera no llegue ningun cliente.
b) No llegue ningun cliente en una jornada de 12 horas.
c) Se presente exactamente un cliente en todas y cada una de las12 horas en las que esta abierto el establecimiento en un dıa.
142. Superposicion. Demuestre que la suma de dos procesos de Poissonindependientes es nuevamente un proceso de Poisson con parametrola suma de los parametros. Nota: la operacion suma debe entenderseen el sentido de superponer los dos procesos puntuales.

6.8. Ejercicios 159
143. Thinning. Sea tNt : t ¥ 0u un proceso de Poisson de parametroλ ¡ 0. Considere una sucesion de variables aleatorias Y1, Y2, . . .
independientes, con distribucion comun Berppq e independientes delproceso de Poisson. Defina el proceso tXt : t ¥ 0u como apareceabajo, definiendo ademas a Xt como cero cuando Nt es cero.
Xt
Nt
k1
Yk,
Ası, el proceso tXt : t ¥ 0u representa un subconteo del proceso dePoisson inicial.
a) Demuestre que tXt : t ¥ 0u es un proceso de Poisson deparametro λp.
b) Sea t ¥ 0 fijo. Demuestre que las variables aleatorias Xt yNt Xt son independientes. En general se cumple que losprocesos estocasticos tXt : t ¥ 0u y tNt Xt : t ¥ 0u sonindependientes.
144. Suponga que los accidentes automovilısticos en una cierta ciudadocurren de acuerdo a un proceso de Poisson con un promedio decinco accidentes por semana. Suponga ademas que la probabilidadde que en cada accidente haya personas lastimadas que requieranatencion medica es 0.2 . Calcule la probabilidad de que:
a) En un dıa no se presente ningun accidente.
b) En una semana no se presente ningun accidente.
c) En un mes no se presente ningun accidente con personas las-timadas.
145. Sea tNt : t ¥ 0u un proceso de Poisson con parametro λ, y seaa ¡ 0 una constante. Demuestre que tNat : t ¥ 0u es un proceso dePoisson con parametro λa.
146. Considere dos procesos de Poisson independientes de parametros λ1
y λ2. Sea X el numero de eventos que ocurren en el primer proceso

160 6. Procesos estocasticos
entre dos eventos sucesivos del segundo proceso. Demuestre que X
tiene la siguiente distribucion geometrica.
P pX nq λ2
λ1 λ2
λ1
λ1 λ2
n
, n ¥ 0.
Cadenas de Markov a tiempo continuo
147. Escriba el sistema retrospectivo de ecuaciones diferenciales de Kol-mogorov para las probabilidades p0nptq pnptq del proceso de Poi-sson y compruebe que su solucion es pnptq eλt
pλtqnn!
Martingalas
148. Martingala del juego de apuestas. Sea ξ1, ξ2, . . . una sucesion devariables aleatorias independientes identicamente distribuidas y conesperanza finita. Para cada entero n ¥ 1 defina
Xn ξ1 ξn.
Demuestre que el proceso a tiempo discreto tXn : n ¥ 1u es unamartingala si y solo si Epξq 0.
149. Proceso de Poisson centrado. Sea tNt : t ¥ 0u un proceso de Poi-sson de parametro o intensidad λ, junto con su filtracion natural.Demuestre que el proceso centrado tNtλt : t ¥ 0u es una martin-gala.
150. Procesos con incrementos independientes. Sea tXt : t ¥ 0u un pro-ceso estocastico a tiempo continuo tal que cada una de sus va-riables aleatorias tiene esperanza finita. Suponga que el procesotiene incrementos independientes. Demuestre que el proceso cen-trado tXt EpXtq : t ¥ 0u es una martingala.
151. Martingala de de Moivre. Sea ξ1, ξ2, . . . una sucesion de variablesaleatorias independientes cada una de ellas con la misma distribu-cion dada por
P pξ 1q p
y P pξ 1q q 1 p.

6.8. Ejercicios 161
Para cada entero n ¥ 1 defina la variable Xn ξ1 ξn.Demuestre que el proceso estocastico a tiempo discreto tYn : n ¥ 1udado por Yn pqpqXn es una martingala.
152. Demuestre que el proceso tXt : t ¥ 0u es una submartingala si ysolo si tXt : t ¥ 0u es una supermartingala.
153. Demuestre que un proceso es una martingala si y solo si es al mismotiempo una submartingala y una supermartingala.


Capıtulo 7
Teorıa de la ruina:tiempo discreto
Este capıtulo contiene una introduccion elemental a uno de los problemascentrales de la teorıa del riesgo: el problema de la ruina. Estudiaremos esteproblema en una version discreta. Definiremos primero un proceso de riesgoa tiempo discreto y encontraremos una formula general recursiva para laprobabilidad de ruina con horizonte infinito. Presentaremos tambien unaformula para la probabilidad de ruina con horizonte finito, ası como el con-cepto de coeficiente de ajuste para este modelo y su aplicacion en la des-igualdad de Lundberg. Estudiaremos tambien el problema de calcular ladistribucion de probabilidad de la severidad de ruina cuando esta se pre-senta. Todos estos resultados seran extendidos en el siguiente capıtulo, endonde se estudiara el modelo clasico de riesgo a tiempo continuo.
7.1. Un proceso de riesgo a tiempo discreto
Definiremos a continuacion un proceso estocastico a tiempo discreto quemodela de manera simplificada la evolucion a lo largo del tiempo del ca-pital de una companıa aseguradora respecto de una cartera de asegurados.Suponga que u P t0, 1, 2 . . .u es el capital inicial de la aseguradora y que encada unidad de tiempo la companıa aseguradora recibe una unidad mone-taria por concepto de primas. Si Y1, Y2, . . . representan los montos de lasreclamaciones en los periodos sucesivos, entonces el capital de la companıa
163

164 7. Teorıa de la ruina: tiempo discreto
aseguradora al tiempo n ¥ 1 es la variable aleatoria Cn definida a continua-cion.
Definicion 7.1 El proceso de riesgo a tiempo discreto tCn : n ¥ 0uesta dado por
Cn u n
n
j1
Yj , (7.1)
en donde u ¥ 0 es un entero y Y1, Y2, . . . son variables aleatorias indepen-dientes e identicamente distribuidas con valores en el conjunto t0, 1, . . .u ytales que EpY q 1.
Dada la hipotesis de independencia e identica distribucion de las varia-bles aleatorias Y1, Y2, . . ., puede comprobarse que el proceso tCn : n ¥ 0utiene incrementos independientes y estacionarios. Observamos ademas quese puede escribir
Cn u
n
j1
p1 Yjq,
y por lo tanto tCn : n ¥ 0u es una caminata aleatoria sobre Z en donde lossaltos son de magnitud 1 Yj con valores en el conjunto t. . . ,2,1, 0, 1u.Por otro lado, hemos supuesto que las variables aleatorias Y1, Y2, . . . son talesque EpY q 1, a esta condicion la llamaremos condicion de ganancia neta yestablece que por cada unidad de tiempo, la cantidad de dinero recibida porconcepto de primas, en este caso una unidad monetaria, es mayor al valorpromedio de las reclamaciones.
Condicion de ganancia neta EpY q 1
Debe observarse que no es realista la hipotesis de que las primas recibidasen cada unidad de tiempo sean unitarias. Se puede considerar un modelomas aplicable al admitir que el ingreso por primas en cada periodo es unentero cualquiera c ¥ 1. En ese caso, mediante un cambio adecuado enla forma en la que se mide el tiempo, esa constante c puede considerarse

7.1. Un proceso de riesgo a tiempo discreto 165
como una unidad monetaria. Sin embargo, tal cambio en el tiempo no sepuede aplicar de manera tan inmediata pues afecta tambien los montos delas reclamaciones. Dado que nuestro objetivo en este capıtulo es presentarde manera simple algunos problemas de la teorıa de la ruina en un modelodiscreto, mantendremos la hipotesis de primas unitarias pues las formulasy resultados adquieren expresiones mas sencillas que en el caso general.En la presente seccion la variable Y representara a cualquiera de las variablesYj que aparecen en la expresion (7.1), F pyq sera la funcion de distribucionde Y y la correspondiente funcion de probabilidad se denotara por fpyq. Enlas formulas que encontraremos mas adelante aparecera con frecuencia eltermino P pY ¡ yq 1F pyq y para hacer las expresiones mas cortas dichaprobabilidad sera denotada por F pyq. En ocasiones a esta probabilidad sele llama funcion de supervivencia.
Notacion F pyq : 1 F pyq
Dado que la variable Y es discreta con valores en el conjunto t0, 1, . . .u, suesperanza puede entonces escribirse de la siguiente forma:
EpY q
8
¸
y0
F pyq.
Por otro lado, dadas las caracterısticas que hemos solicitado para la defini-cion del proceso tCn : n ¥ 0u, este resulta ser una cadena de Markovcon espacio de estados o valores dado por el conjunto discreto Z. Y hemosconsiderado valores enteros negativos, pues alguna reclamacion puede serdemasiado grande y llevar al proceso a estados crıticos para la aseguradora.Justamente esta situacion es nuestro objeto de interes y es el contenido dela siguiente definicion.

166 7. Teorıa de la ruina: tiempo discreto
Definicion 7.2 Se dice que la companıa aseguradora se encuentra en ruinaal tiempo n ¥ 1 si
Cn ¤ 0,
y se define el tiempo de ruina τ como el primer momento en que la ruinase presenta, es decir,
τ mın tn ¥ 1 : Cn ¤ 0u. (7.2)
En la expresion (7.2) se debe entender que cuando el conjunto indicado esvacıo se define τ 8, y equivale a la situacion cuando la ruina nunca sepresenta. El problema de la ruina consiste en encontrar la probabilidad deque la ruina ocurra en algun conjunto de tiempos especıfico. Por ejemplo,la probabilidad ruina con horizonte infinito es P pτ 8q y se denota usual-mente por ψpuq. Con esta notacion se hace enfasis en que tal probabilidaddepende, entre otros parametros del modelo, particularmente del capitalinicial u. Tenemos entonces que
ψpuq P pτ 8 |C0 uq
P pτ P t1, 2, . . .u |C0 uq.
Observe que tecnicamente no hay ruina al tiempo cero, aun cuando se con-sidere al capital inicial u igual a cero, pues de acuerdo con la Definicion 7.2,la ruina solo puede ocurrir en los tiempos n ¥ 1. Intuitivamente es claro quela funcion u ÞÑ ψpuq es decreciente, es decir, a mayor capital inicial menorprobabilidad de ruina. Esta propiedad puede escribirse de la siguiente forma:para cualquier u ¥ 0,
ψpu 1q ¤ ψpuq.
En la Figura 7.1 se muestra una posible trayectoria del proceso tCn : n ¥ 0u,en donde para fines de visualizacion se han unido los valores del procesomediante lıneas punteadas indicando ademas los incrementos unitarios porconcepto de primas en cada intervalo. Se muestra ademas un posible mo-mento τ en donde se presenta la ruina. La propiedad de Markov del procesode riesgo nos permitira encontrar una formula recursiva para la probabili-dad de ruina en este modelo discreto. En las expresiones que escribiremos

7.2. Probabilidad de ruina con horizonte infinito 167
u
n
Cnpωq
τ
b
bc
b
b
bc
b
bc
b
b
b
b
bc
b
bc
b
b
b
bc
b
b
Figura 7.1
a continuacion las sumas°b
a se definen como cero cuando los ındices a y b
son tales que a ¡ b. Usaremos ademas el hecho intuitivamente claro de quela probabilidad de ruina es cero cuando el capital inicial es infinito. Masadelante daremos la demostracion de esta propiedad y la comprobaremosde manera sencilla en el caso cuando podamos aplicar la desigualdad deLundberg. Ası, tenemos que
lımuÑ8
ψpuq 0.
7.2. Probabilidad de ruina con horizonte infinito
El siguiente resultado provee de un mecanismo recursivo para calcular laprobabilidad de ruina con horizonte infinito en el proceso de riesgo a tiempodiscreto.

168 7. Teorıa de la ruina: tiempo discreto
Proposicion 7.1 Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0ucon valor inicial u ¥ 0,
1. ψpuq ψp0q u1
y0
ψpu yqF pyq
u1
y0
F pyq, u ¥ 1.
2. ψp0q EpY q.
Demostracion. Para cualquier capital inicial w ¥ 0 y condicionandosobre el valor de Y1 tenemos los siguientes calculos, los cuales explicaremosen el siguiente parrafo.
ψpwq
8
¸
y0
P pτ 8 |Y1 yqP pY1 yq
w
y0
P pτ 8 |Y1 yq fpyq
8
¸
yw1
P pτ 8 |Y1 yq fpyq
w
y0
ψpw 1 yq fpyq
8
¸
yw1
fpyq
w1
y1
ψpyq fpw 1 yq F pwq. (7.3)
Observe que en la segunda igualdad se han separado dos casos: la primerasuma se refiere al caso cuando el monto reclamado Y1 no produce ruina y lasegunda suma cuando se presenta la ruina. En el segundo caso la probabili-dad condicional indicada es 1. En el primer caso la probabilidad condicionalse reduce a la probabilidad ψpw1yq, pues siendo la primera reclamacionde magnitud y y no habiendo ruina en esta primera reclamacion, la probabi-lidad condicional original se reduce a la probabilidad de que no se presentela ruina desde el momento de la primera reclamacion en adelante pero ahoracon capital inicial w 1 y. Por la propiedad de incrementos independien-tes, esta probabilidad es ψpw 1 yq. Despejando el ultimo termino de la

7.2. Probabilidad de ruina con horizonte infinito 169
suma (7.3) y escribiendo u en lugar de w se obtiene
ψpu 1qfp0q ψpuq
u
y1
ψpyq fpu 1 yq F puq. (7.4)
Sumando ahora las ecuaciones de (7.3) para valores de w de cero a cualquieru ¥ 0, se tiene que
u
w0
ψpwq
u
w0
w1
y1
ψpyq fpw 1 yq
u
w0
F pwq
u1
y1
ψpyq
u
wy1
fpw 1 yq
u
w0
F pwq
u1
y1
ψpyqF pu 1 yq
u
w0
F pwq
ψpu 1q fp0q u
y1
ψpyqF pu 1 yq
u
w0
F pwq
Para obtener la ultima identidad se separa el ultimo sumando de la primerasuma y se observa que F p0q fp0q. Despejando este termino se obtiene
ψpu 1q fp0q ψp0q u
y1
ψpyqp1 F pu 1 yqq
u
y0
F pyq. (7.5)
Igualando el lado derecho de esta ecuacion con el lado derecho de la ecuacion (7.4)se obtiene
ψpuq ψp0q u
y1
ψpyqp1 F pu 1 yq fpu 1 yqq
u1
y0
F pyq
ψp0q u
y1
ψpyqF pu yq
u1
y0
F pyq
ψp0q u1
y0
ψpu yqF pyq
u1
y0
F pyq. (7.6)

170 7. Teorıa de la ruina: tiempo discreto
Esto demuestra la primera parte de la proposicion. Resta entonces demostrarque ψp0q EpY q. Para ello tomaremos el lımite cuando u Ñ 8 en laecuacion (7.6). Tenemos entonces que
0 lımuÑ8
ψpuq ψp0q lımuÑ8
u1
y0
ψpu yqF pyq
8
¸
y0
F pyq.
Observamos que la segunda suma es EpY q, de modo que es suficiente de-mostrar que el lımite de la primera suma es cero. Como EpY q 8, paracualquier ǫ ¡ 0 puede encontrarse un valor de n natural tal que
8
¸
yn1
F pyq ǫ.
Entoncesu1
y0
ψpu yqF pyq ¤
8
¸
y0
ψpu yqF pyq
¤
n
y0
ψpu yq
8
¸
yn1
F pyq.
Por lo tanto al tomar el lımite cuando uÑ8 obtenemos que
lımuÑ8
u1
y0
ψpu yqF pyq ¤ ǫ.
Siendo ǫ arbitrario, el lımite es efectivamente cero. ¥
En analogıa con la notacion F pyq 1F pyq, la expresion ψpuq denotara laprobabilidad 1ψpuq, esto representa la probabilidad de que la ruina nuncase presente.
Notacion ψpuq : 1 ψpuq
Usando esta nomenclatura, la ecuacion recursiva para ψpuq tambien puedeser escrita como sigue
ψpuq ψp0q u1
y0
ψpu yqF pyq, u ¥ 1. (7.7)

7.2. Probabilidad de ruina con horizonte infinito 171
Por otro lado, recordando nuevamente que Y es una variable aleatoria convalores enteros en el conjunto t0, 1, . . .u y con esperanza finita, se puedeescribir
EpY q
8
¸
y0
F pyq.
De modo que uniendo los dos resultados de la Proposicion 7.1 y despuesde un cambio de variable se encuentra que la formula recursiva para ψpuq
tambien puede ser escrita de la forma siguiente:
ψpuq
u1
y0
ψpu yqF pyq
8
¸
yu
F pyq, u ¥ 1. (7.8)
En el siguiente capıtulo encontraremos una formula similar a (7.8) para laprobabilidad de ruina considerando un modelo de riesgo a tiempo continuo.
Ejemplo 7.1 Suponga que las reclamaciones Y tienen distribucion dadapor la tabla que aparece abajo. Usando la formula recursiva de la Proposi-cion 7.1, encontraremos ψpuq para los primeros valores de u.
y 0 1 2
fpyq 0.5 0.2 0.3
Primeramente tenemos que ψp0q EpY q 0.8 1. Para u 1 la formularecursiva establece que ψp1q ψp1qF p0q F p1q. Sustituyendo las probabi-lidades correspondientes se obtiene ψp1q 0.6. Para u 2 se tiene queψp2q ψp1qF p1q ψp2qF p0q, de donde se obtiene ψp2q 0.36. Analoga-mente se obtienen las probabilidades de ruina que se muestran en las si-guientes tablas.
u ψpuq
0 0.8
1 0.6
2 0.36
3 0.216
4 0.1296
5 0.07776
u ψpuq
6 0.046656
7 0.0279936
8 0.01679616
9 0.010077696
10 0.006046618
11 0.0036279708

172 7. Teorıa de la ruina: tiempo discreto
u
ψpuq
0 1 2 3 4 5 6 7 8 9 10
0.2
0.4
0.6
0.8
1.0
Figura 7.2
En la Figura 7.2 se muestra una grafica de barras de los valores encontradosde ψpuq. Como era de esperarse, se observa un comportamiento decrecientede la probabilidad de ruina conforme el capital inicial se incrementa.
Ejemplo 7.2 (Problema de la ruina del jugador) Considere el procesode riesgo a tiempo discreto tCn : n ¥ 0u en donde las reclamaciones tienenla siguiente distribucion de probabilidad:
P pY 0q p,
P pY 2q 1 p,
en donde 12 p 1. De esta forma al termino de cada periodo el procesose incrementa en una unidad cuando Y 0, o se reduce en una unidadcuando Y 2. La condicion que hemos mencionado para el valor de p
garantiza que se cumple la condicion de ganancia neta EpY q 2p1pq 1.La variable Cn representa entonces el capital de un jugador A que apuestauna unidad monetaria en cada unidad de tiempo, su capital inicial es u yel jugador contrario B puede considerarse que tiene capital infinito. Encon-traremos la probabilidad de que el jugador A (i.e. la companıa aseguradora)eventualmente se arruine. Por los resultados de la Proposicion 7.1,
ψp0q EpY q 2p1 pq 1.

7.2. Probabilidad de ruina con horizonte infinito 173
Por otro lado, la funcion F pyq es:
F p0q 1 p,
F p1q 1 p,
F pyq 0 para y ¥ 2,
y entonces, para u 1 se tiene que
ψp1q ψp0q ψp1qF p0q F p0q.
De donde se obtiene
ψp1q 1 p
p.
Para u 2 se obtiene la ecuacion
ψp2q ψp0q ψp2qF p0q ψp1qF p1q F p0q F p1q,
que produce la solucion
ψp2q
1 p
p
2
.
Usando induccion sobre u, se puede demostrar que para cualquier capitalinicial u ¥ 1,
ψpuq
1 p
p
u
.
Esta es la probabilidad de ruina del jugador A (companıa aseguradora) cuan-do su capital inicial es u y es una version particular de la solucion al pro-blema de la ruina del jugador, vease por ejemplo [31]. Se observa que estaprobabilidad converge a cero cuando u tiende a infinito.
En general, dada una distribucion de probabilidad particular para las recla-maciones, la formula recursiva para la probabilidad de ruina de la Proposi-cion 7.1 no produce expresiones compactas. El siguiente es uno de los pocosejemplos en los que la probabilidad de ruina tiene una formula muy corta.
Ejemplo 7.3 (Reclamaciones geometricas) Considere el modelo deriesgo a tiempo discreto en donde las reclamaciones tienen distribuciongeoppq, es decir, la funcion de probabilidad es
fpyq p1 pqy p, y 0, 1, 2, . . .

174 7. Teorıa de la ruina: tiempo discreto
A partir de las formulas que aparecen en la Proposicion 7.1 pueden en-contrarse los valores de ψpuq de manera sucesiva para u 0, 1, 2, . . .. Masformalmente, usando induccion sobre el parametro u puede demostrarse quepara cualquier capital inicial u ¥ 0 y para cualquier p ¡ 12,
ψpuq
1 p
p
u1
.
Concluimos esta seccion mostrando el comportamiento lımite de la proba-bilidad de ruina cuando el capital inicial crece a infinito. La demostracionde este resultado se basa en el analisis presentado antes para justificar lahipotesis de ganancia neta en la seccion introductoria sobre los principiospara el calculo de primas.
Proposicion 7.2 Para el modelo de riesgo a tiempo discreto y bajo lacondicion de ganancia neta,
lımuÑ8
ψpuq 0.
Demostracion. Por la ley fuerte de los grandes numeros y la condicionde ganancia neta tenemos que
lımnÑ8
1
nCn lım
nÑ8
1
npu n
n
j1
Yjq
1 lımnÑ8
1
n
n
j1
Yj
1EpY q ¡ 0.
Ası, este comportamiento lımite implica forzosamente la v.a. Cn divergea infinito casi seguramente cuando n Ñ 8. En consecuencia, la variableınfn¥0 Cn esta acotada por abajo casi seguramente. Por lo tanto, tomandoun capital inicial u suficientemente grande, la cota inferior de ınfn¥0 Cn
puede hacerse igual a cero, es decir,
ınfn¥0
Cn ¥ 0.

7.3. Probabilidad de ruina con horizonte finito 175
Esto quiere decir que ψpuq 0 cuando uÑ8. ¥
7.3. Probabilidad de ruina con horizonte finito
La probabilidad de ruina con horizonte finito n ¥ 1 se define como
ψpu, nq P pτ ¤ n |C0 uq
P pτ P t1, 2, . . . , nu |C0 uq,
y corresponde a la probabilidad de que la ruina se presente en alguno delos tiempos: 1, 2, . . . , n. Puesto que siempre estaremos en el caso C0 u,se omitira esta condicion y la probabilidad de ruina con horizonte finito sepuede escribir simplemente como P pτ ¤ nq. Observe entonces que ψpu, nq esla funcion de distribucion del tiempo de ruina τ evaluada en el valor enteron. Naturalmente estamos interesados en conocer esta funcion. A partir deobservar la contencion de los eventos correspondientes se puede verificar que
ψpu, 1q ¤ ψpu, 2q ¤ ¤ ψpu, nq ¤ ψpuq.
En particular cuando el capital tiende a infinito esta probabilidad de ruinatambien se anula, es decir, para cualquier n ¥ 1 fijo,
lımuÑ8
ψpu, nq ¤ lımuÑ8
ψpuq 0.
Condicionando sobre el monto de la primera reclamacion tal como se hizo enel caso de horizonte infinito, mostramos a continuacion una forma recursivade encontrar ψpu, nq.
Proposicion 7.3 Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0ucon valor inicial u ¥ 0, la probabilidad de ruina con horizonte finito ψpu, nq
puede calcularse de la siguiente forma
1. ψpu, 1q F puq.
2. ψpu, nq F puq
u
y0
ψpu 1 y, n 1q fpyq, n ¥ 2.

176 7. Teorıa de la ruina: tiempo discreto
Demostracion.
Para n 1,
ψpu, 1q P pτ 1q P pu 1 Y1 ¤ 0q P pY1 ¥ u 1q F puq.
Para n ¥ 2, condicionando sobre el valor de la primera reclamacion,
ψpu, nq P pτ ¤ nq
8
¸
y0
P pτ ¤ n |Y1 yqP pY1 yq
u
y0
ψpu 1 y, n 1q fpyq 8
¸
yu1
fpyq
u
y0
ψpu 1 y, n 1q fpyq F puq.
¥
Ejemplo 7.4 Consideremos nuevamente el caso cuando los montos Y tienendistribucion dada por la tabla que aparece abajo. Usando la formula recursivade la Proposicion 7.3 encontraremos ψpu, nq, cuando u 0 y n 1, 2, 3, 4, 5.
y 0 1 2
fpyq 0.5 0.2 0.3
Para n 1 tenemos que ψp0, 1q F p0q 0.5. Para n 2, la formularecursiva lleva a la ecuacion ψp0, 2q ψp0, 1q ψp1, 1qfp0q, usando el he-cho de que ψp1, 1q 0.3 se obtiene ψp0, 2q 0.65. Para n 3, se tieneque ψp0, 3q ψp0, 1q ψp1, 2qfp0q, en donde ψp1, 2q se calcula usando lamisma formula recursiva. Al hacer los calculos se obtiene ψp0, 3q 0.68.Analogamente y utilizando repetidamente la formula recursiva se obtienenlas probabilidades de ruina restantes que se muestran en la siguiente tabla.
n 1 2 3 4 5
ψp0, nq 0.5 0.65 0.68 0.7085 0.7232

7.4. Coeficiente de ajuste 177
El comportamiento creciente de n ÞÑ ψp0, nq se muestra en la Figura 7.3 ytales probabilidades son siempre menores o iguales a ψp0q 0.8, es decir,
ψp0, 1q ¤ ψp0, 2q ¤ ¤ ψp0, 5q ¤ ¤ ψp0q 0.8 .
El valor ψp0q 0.8 fue calculado en el Ejemplo 7.1.
n
ψp0, nq
ψp0q
0 1 2 3 4 5
0.4
0.6
0.8
1.0
Figura 7.3
7.4. Coeficiente de ajuste
Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0u, vamos a definirahora un numero llamado coeficiente de ajuste o exponente de Lundberg.La definicion aparece a continuacion y por ahora se presenta sin motivacionni justificacion alguna. Las razones por las cuales tal numero se define deesa manera seran evidentes en la siguiente seccion en donde encontraremosuna cota superior para la probabilidad de ruina en el modelo de riesgomencionado y en donde aparece de manera natural el coeficiente de ajuste.

178 7. Teorıa de la ruina: tiempo discreto
Definicion 7.3 (Coeficiente de ajuste) Suponga que la funcion genera-dora de momentos de las reclamaciones Y en el proceso de riesgo a tiempodiscreto tCn : n ¥ 0u existe y que EpY q 1. El coeficiente de ajuste paraeste proceso de riesgo se define como la unica solucion positiva r de laecuacion
ErerpY1qs 1. (7.9)
A tal solucion positiva se le denota por R.
Explıcitamente el coeficiente de ajuste es aquel numero positivo r tal que
8
¸
y0
erpy1q fpyq 1.
Para justificar que esta ecuacion tiene efectivamente una unica solucionpositiva se define la funcion
θprq ErerpY1qs
y se comprueba que θprq cumple las siguientes propiedades:
a) θprq ¡ 0 para r ¥ 0.
b) θp0q 1.
c) θ1prq ErpY 1qerpY1qs.
d) θ2prq ErpY 1q2erpY1qs.
e) lımrÑ8
θprq 8, cuando F p1q 1.
Ası, el comportamiento de θprq alrededor de cero es el siguiente: toma elvalor 1 en r 0, la derivada por la derecha en r 0 es θ1p0q EpY 1q, queresulta ser negativa por la hipotesis de ganancia neta EpY q 1. La segundaderivada en cero es θ2p0q ErpY 1q2s ¡ 0. Finalmente, si F p1q 1entonces θprq crece a infinito cuando r Ñ 8. Esta afirmacion se verificamas abajo. Todas estas observaciones acerca de la funcion θprq demuestran

7.4. Coeficiente de ajuste 179
1
R
θprq
r
Figura 7.4
que existe un unico valor r tal que θprq 1 y ese valor es el coeficiente deajuste R. Una grafica aproximada de θprq se muestra en la Figura 7.4.Veamos mas detenidamente el comportamiento lımite de la funcion θprq.Supongamos que la distribucion de las reclamaciones es tal que F p1q 1.Entonces para cualquier r ¡ 0,
θprq
8
¸
y0
erpy1q fpyq ¡
8
¸
y2
erpy1q fpyq ¡ er8
¸
y2
fpyq erp1 F p1qq.
Ası, cuando F p1q 1 el ultimo factor es positivo y la funcion θprq crece sinlımite cuando r Ñ8.
Ejemplo 7.5 (Reclamaciones Bernoulli) Consideremos el caso de recla-maciones con distribucion Berppq, con 0 ¤ p 1. En este caso, F p1q 1 ypor lo tanto no se satisface la condicion F p1q 1. La funcion θprq es
θprq p1 pq er p.
Es claro que esta funcion decrece exponencialmente cuando r Ñ8 y por lotanto no cruza su valor inicial θp0q 1. Por lo tanto no existe el coeficientede ajuste en este caso. Para este tipo de reclamaciones las probabilidades deruina son: ψp0q p y ψpuq 0 para u ¥ 1.
Observamos que de todas las distribuciones para las reclamaciones Y talesque EpY q 1, la unica distribucion de probabilidad que no satisface las

180 7. Teorıa de la ruina: tiempo discreto
condicion F p1q 1 es la distribucion Berppq de parametro 0 ¤ p 1. Enconclusion, exceptuando esta distribucion, se puede garantizar la existenciadel coeficiente de ajuste para cualquier distribucion de probabilidad sobreel conjunto t0, 1, 2, . . .u con funcion generadora de momentos finita y conesperanza menor a 1.En general no es sencillo resolver la ecuacion (7.9) para encontrar el coefi-ciente de ajuste. En una situacion particular, a menudo es necesario usaralgun procedimiento numerico como el metodo de Newton-Raphson paraaproximar el valor de este coeficiente. En el apendice el lector puede en-contrar una breve descripcion del metodo de Newton-Raphson. El siguienteejemplo es atıpico, pues se puede encontrar el coeficiente de ajuste con fa-cilidad.
Ejemplo 7.6 (Problema de la ruina del jugador, continuacion) Con-sidere nuevamente la distribucion de probabilidad para las reclamacionescomo en el Ejemplo 7.2 del problema de la ruina del jugador:
P pY 0q p,
P pY 2q 1 p,
en donde 12 p 1. El coeficiente de ajuste en este caso se calcula comola solucion positiva r de la ecuacion
EperpY1q per
p1 pqer 1.
Esto equivale a resolver una ecuacion cuadratica, cuyas soluciones son
r
"
0,ln p p
1pq.
Ası, el coeficiente de ajuste es R ln p p1p
q.
7.5. Desigualdad de Lundberg
Demostraremos a continuacion que es posible encontrar una cota superiorpara las probabilidades de ruina en el modelo de riesgo a tiempo discreto.Tal cota superior esta dada en terminos del coeficiente de ajuste.

7.5. Desigualdad de Lundberg 181
Proposicion 7.4 (Desigualdad de Lundberg) Para el proceso de ries-go a tiempo discreto tCn : n ¥ 0u con capital inicial u ¥ 0 y cuandoel coeficiente de ajuste R existe, las probabilidades de ruina con horizontefinito e infinito satisfacen las siguientes desigualdades:
1. ψpu, nq ¤ eRu, n ¥ 1.
2. ψpuq ¤ eRu.
Demostracion. Primeramente observamos que el segundo resultado esconsecuencia del primero, pues
ψpuq lımnÑ8
ψpu, nq ¤ lımnÑ8
eRu eRu.
Para demostrar el primer resultado usaremos el metodo de induccion sobre elparametro n. Para n 1 tenemos que, por la Proposicion 7.3 y la existenciadel coeficiente de ajuste R,
ψpu, 1q F puq
8
¸
yu1
fpyq
¤
8
¸
yu1
eRpu1yq fpyq
¤
8
¸
y0
eRpu1yq fpyq
eRu8
¸
y0
eRpy1q fpyq
eRu.
En la penultima igualdad la suma indicada vale 1, pues esa es justamente ladefinicion de coeficiente de ajuste. Supongamos ahora que ψpu, nq ¤ eRu
para algun valor entero fijo n ¥ 1. Entonces, nuevamente por la formula

182 7. Teorıa de la ruina: tiempo discreto
general de la Proposicion 7.3,
ψpu, n 1q ψpu, 1q u
y0
ψpu 1 y, nq fpyq
¤
8
¸
yu1
fpyq
u
y0
eRpu1yq fpyq
¤
8
¸
yu1
eRpu1yq fpyq
u
y0
eRpu1yq fpyq
8
¸
y0
eRpu1yq fpyq
eRu8
¸
y0
eRpy1q fpyq
eRu.
¥
En el caso cuando el coeficiente de ajuste existe, es una consecuencia in-mediata de la desigualdad de Lundberg que las probabilidades de ruina seanulan cuando el capital inicial tiende a infinito, es decir,
lımuÑ8
ψpuq lımuÑ8
ψpu, nq 0.
Con ayuda del siguiente resultado daremos una demostracion alternativa dela desigualdad de Lundberg, esta vez usando la teorıa de martingalas.
Proposicion 7.5 Sea tCn : n ¥ 0u el proceso de riesgo a tiempo discreto.Suponga que el coeficiente de ajuste R existe. Entonces el proceso abajoespecificado es una martingala a tiempo discreto.
teRCn : n ¥ 0u.
Demostracion. Sea pFnqn¥0 la filtracion natural del proceso teRCn :n ¥ 0u. La existencia del coeficiente de ajuste garantiza que cada variable

7.5. Desigualdad de Lundberg 183
de este proceso tiene esperanza finita. En efecto, no es difıcil comprobar que
EpeRCnq eRu.
Por otro lado, para cualquier n ¥ 0,
EpeRCn1|Fnq EpeRpCn1Yn1q
|Fnq
eRCn EpeRpY1qq
eRCn .
En la segunda igualdad hemos usado la hipotesis de independencia de lasreclamaciones y para la ultima igualdad se uso la definicion de coeficientede ajuste. ¥
Demostracion. (Desigualdad de Lundberg, segunda demostracion). Sea τ
el tiempo de paro definido como el momento de la ruina en el proceso deriesgo a tiempo discreto. Como tCn : n ¥ 0u es una martingala, tambien loes tCn^τ : n ¥ 0u. Recordemos que x^ y mıntx, yu. Ambas martingalascomienzan en el valor eRu. Entonces para cualquier n ¥ 1,
eRu eRC0
EpeRCn^τq
EpeRCn^τ| τ ¤ nqP pτ ¤ nq
EpeRCn^τ| τ ¡ nqP pτ ¡ nq
¥ EpeRCn^τ| τ ¤ nqP pτ ¤ nq
EpeRCτ| τ ¤ nqP pτ ¤ nq.
Haciendo nÑ8 monotonamente puede demostrarse que el evento pτ ¤ nq
converge crecientemente al evento pτ 8q y que la esperanza condicionalindicada converge a EpeRCτ
| τ 8q. Por lo tanto,
eRu¥ EpeRCτ
| τ 8qP pτ 8q
¥ Ep 1 | τ 8qP pτ 8q
P pτ 8q
ψpuq.

184 7. Teorıa de la ruina: tiempo discreto
Las probabilidades de ruina con horizonte finito tambien tienen la mismacota superior, pues para cualquier n ¥ 1,
ψpu, nq ¤ ψpuq ¤ eRu.
¥
Ejemplo 7.7 (Problema de la ruina del jugador, continuacion) Enel Ejemplo 7.2 hemos calculado la probabilidad exacta de ruina para el mo-delo de riesgo cuando las reclamaciones son tales que P pY 0q p yP pY 2q 1 p, con 2p1 pq 1. Esta probabilidad es, para u ¥ 1,
ψpuq
1 p
p
u
.
Por otro lado, en el Ejemplo 7.6 hemos encontrado que el coeficiente deajuste en este caso es
R ln
p
1 p
.
Podemos entonces comparar ψpuq con la cota de Lundberg eRu. Despues dealgunos calculos sencillos puede comprobarse que estas cantidades coinciden,es decir,
ψpuq eRu, u ¥ 1.
Esto demuestra que sin ninguna otra condicion adicional, la cota superiorde Lundberg es optima.
7.6. Severidad de la ruina
Consideremos nuevamente el proceso de riesgo a tiempo discreto tCn : n ¥0u con capital inicial u ¥ 0. Sea τ el tiempo de ruina en este modelo y definala probabilidad
ϕpu, zq P pτ 8,Cτ ¤ zq,
para u 0, 1, 2, . . . y z 0, 1, 2, . . . Observe que para hacer la escritura mascorta, hemos omitido escribir esta expresion como una probabilidad condi-cional cuando C0 u. Esta funcion representa la probabilidad conjunta de

7.6. Severidad de la ruina 185
que la ruina ocurra en un tiempo finito y que el deficit de la aseguradoraal momento de la ruina sea menor o igual al valor z. A la variable aleatoriaCτ se le llama severidad de la ruina o deficit al momento de la ruina. Semuestra graficamente su significado en la Figura 7.5.
u
n
Cnpωq
τ
b
bc
b
b
bc
b
bc
b
b
b
b
bc
b
bc
b
b
b
Cτ
Figura 7.5
Demostraremos a continuacion una formula recursiva para la probabilidadϕpu, zq. Para ello usaremos el hecho de que dicha probabilidad se anulacuando el capital inicial es infinito, es decir,
lımuÑ8
ϕpu, zq ¤ lımuÑ8
ϕpuq 0.
El metodo de la demostracion es muy similar al presentado para la pro-babilidad de ruina con horizonte infinito ψpuq. En la seccion de ejerciciosaparece una formula recursiva para la severidad de la ruina con horizontefinito.

186 7. Teorıa de la ruina: tiempo discreto
Proposicion 7.6 Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0ucon capital inicial u ¥ 0 y tiempo de ruina τ , la funcion
ϕpu, zq P pτ 8,Cτ ¤ zq,
para z 0, 1, . . ., satisface las siguientes identidades:
1. ϕpu, zq ϕp0, zq u1
y0
ϕpu y, zq F pyq
z
y0
rF pu yq F pyqs.
2. ϕp0, zq z
y0
F pyq.
Demostracion. Condicionando sobre el monto de la primera reclamacion,
ϕpu, zq
8
¸
y0
P pτ 8, Cτ ¡ z |Y1 yq fpyq
u
y0
ϕpu 1 y, zq fpyq
uz1¸
yu1
fpyq.
Cuando el monto y toma un valor entre cero y u, no hay ruina, pues altiempo uno el capital de la aseguradora se ha incrementado a u 1, porla propiedad de incrementos independientes del proceso, la probabilidadcondicional se reduce a ϕpu 1 y, zq. Si el monto y esta entre u 1 yu z 1, entonces hay ruina y se cumple la condicion Cτ ¤ z, por lotanto la probabilidad condicional es identicamente uno. Finalmente, si y esmayor a u z 1, hay ruina y la ruina es severa en el sentido de que no secumple la condicion Cτ ¤ z, en este caso la probabilidad condicional escero y es por ello que no aparece en la ultima igualdad. La ultima ecuacionpuede escribirse de la siguiente forma:
ϕpu, zq
u1
y1
ϕpy, zq fpu 1 yq F pu z 1q F puq. (7.10)

7.6. Severidad de la ruina 187
Escribiendo k en lugar de u y sumando estas expresiones para valores k de0 a u se obtiene
u
k0
ϕpk, zq
u
k0
k1
y1
ϕpy, zq fpk 1 yq
u
k0
rF pk z 1q F pkqs
u1
y1
u
ky1
ϕpy, zq fpk 1 yq
u
k0
rF pk z 1q F pkqs
u1
y1
ϕpy, zqF pu 1 yq
u
k0
rF pk z 1q F pkqs
Despejando el termino ϕpu 1, zq,
ϕpu 1, zqF p0q
u
k0
ϕpk, zq
u
y1
ϕpy, zqF pu 1 yq
u
k0
rF pk z 1q F pkqs
ϕp0, zq u
y1
ϕpy, zq p1 F pu 1 yqq
u
k0
rF pk z 1q F pkqs. (7.11)
Por otro lado, de la ecuacion (7.10) se obtiene
ϕpu 1, zqF p0q ϕpu, zq
u
y1
ϕpy, zq fpu 1 yq rF pu z 1q F puqs.
(7.12)Igualando el lado derecho de las ecuaciones (7.11) y (7.12),
ϕpu, zq ϕp0, zq u
y1
ϕpy, zqF pu yq
u1
k0
rF pk z 1q F pkqs.

188 7. Teorıa de la ruina: tiempo discreto
La segunda suma puede expresarse de la siguiente forma:
u1
k0
rF pk z 1q F pkqs
u1
k0
z
y0
rF pk y 1q F pk yqs
z
y0
u1
k0
rF pk y 1q F pk yqs
z
y0
rF pu yq F pyqs.
Por lo tanto,
ϕpu, zq ϕp0, zq u
y1
ϕpy, zqF pu yq
z
y0
rF pu yq F pyqs. (7.13)
Haciendo un cambio de variable en la primera suma se obtiene la primeraformula de la proposicion. Para obtener la segunda formula hacemos u ten-der a infinito en la expresion recien encontrada (7.13). Ası, tenemos que
0 lımuÑ8
ϕpu, zq
ϕp0, zq lımuÑ8
u
y1
ϕpy, zqF pu yq
z
y0
p1 F pyqq.
Resta demostrar que el ultimo lımite indicado es cero. Tenemos que
u
y1
ϕpy, zqF pu yq
u1
v0
ϕpu v, zqF pvq
¤
8
¸
v0
ϕpu v, zqF pvq
¤
n
v0
ϕpu v, zq
8
¸
vn1
F pvq,
en donde n es cualquier entero tal que°
8
vn1F pvq ǫ, para cualquier
ǫ ¡ 0. Ello es posible pues EpY q °
8
v0F pvq 8. Ası, al hacer u tender

7.6. Severidad de la ruina 189
a infinito la primera suma se anula y la segunda suma, como hemos visto,puede hacerse tan pequena como se desee. ¥
Es interesante observar que cuando z Ñ8, es decir, cuando no hay cota parala severidad de la ruina, la probabilidad ϕpu, zq converge a la probabilidad deruina ψpuq y las ecuaciones de la Proposicion 7.6 se reducen a las estudiadasantes en la Proposicion 7.1.Por otro lado, incorporando la expresion de ϕp0, zq en la formula recursi-va para ϕpu, zq y haciendo algunas simplificaciones, puede encontrarse lasiguiente expresion alternativa
ϕpu, zq
u1
y0
ϕpu y, zq F pyq
z
y0
F pu yq.
Comparando esta expresion con la formula para ψpuq dada por la ecua-cion (7.8) de la pagina 171 podemos escribir la diferencia entre ψpuq yϕpu, zq de la siguiente forma:
ψpuq ϕpu, zq
u1
y0
rψpu yq ϕpu y, zqs F pyq
8
¸
yuz1
F pyq.
Pero observemos que
ψpuq ϕpu, zq P pτ 8q P pτ 8,Cτ ¤ zq
P pτ 8,Cτ ¡ zq.
Por lo tanto hemos demostrado que la funcion
ϕ1pu, zq P pτ 8,Cτ ¡ zq
satisface la ecuacion recursiva
ϕ1pu, zq
u1
y0
ϕ1pu y, zqF pyq
8
¸
yuz1
F pyq.
Ejemplo 7.8 (Reclamaciones geometricas) Considere el modelo de ries-go a tiempo discreto en donde las reclamaciones tienen distribucion geoppq,es decir, la correspondiente funcion de probabilidad es
fpyq p1 pqy p, y 0, 1, 2, . . .

190 7. Teorıa de la ruina: tiempo discreto
A partir de las formulas que aparecen en la Proposicion 7.6 y usando in-duccion sobre el parametro u puede demostrarse que
ϕpu, zq r 1 p1 pqz1s
1 p
p
u1
.
Al hacer z tender a infinito obtenemos las probabilidades de ruina con hori-zonte infinito cuando las reclamaciones son geometricas. Estas probabilida-des aparecen en el Ejemplo 7.3.
lımzÑ8
ϕpu, zq
1 p
p
u1
ψpuq.
En el siguiente capıtulo estudiaremos un modelo de riesgo a tiempo continuomuy similar al que hemos estudiado hasta ahora. Algunos de los conceptos,notacion, tecnicas y definiciones que hemos utilizado seran extendidas alcaso cuando el tiempo se mide de manera continua.
Comentarios y referencias
En el presente capıtulo hemos estudiado el problema de la ruina en el proce-so de riesgo a tiempo discreto no trivial mas sencillo posible. El modelo quehemos estudiado puede plantearse con caracterısticas mas generales, pero alconsiderar el modelo elemental estudiado, nuestro objetivo ha sido mostrarel tipo de problemas matematicos que pueden plantearse y en algunos casosmostrar las respuestas que se obtienen en casos particulares. En la respuestageneral a estos problemas hemos encontrado varias formulas recursivas queinvitan a su implementacion en computadora. En algunos casos las probabi-lidades involucradas pueden tomar valores muy cercanos a cero y ello podrıaprovocar problemas numericos. Debe entonces tenerse cuidado al programarestas formulas en una computadora. El material expuesto en este capıtuloesta basado en el capıtulo introductorio a la teorıa de la ruina del texto deDickson [13]. Otras referencias en el tema son [7] y [23]. El lector interesadoen el estudio mas profundo sobre los modelos de riesgo a tiempo discretopuede consultar artıculos de investigacion panoramicos como [24].

7.7. Ejercicios 191
7.7. Ejercicios
Proceso de riesgo a tiempo discreto
154. Encuentre la matriz de probabilidades de transicion en un paso dela cadena de Markov dada por el proceso de riesgo a tiempo discretotCn : n ¥ 0u.
155. El total de montos por reclamaciones durante cada periodo uni-tario en el proceso de riesgo a tiempo discreto se ha modelado me-diante una variable aleatoria discreta Y con valores en el conjuntot0, 1, . . .u y se ha supuesto que la esperanza de esta variable es finita.Demuestre que
EpY q
8
¸
y0
F pyq.
156. Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0u, use laley fuerte de los grandes numeros para demostrar que, en el sentidocasi seguro,
lımnÑ8
Cn
"
8 si EpY q 1,8 si EpY q ¡ 1.
Probabilidad de ruina con horizonte infinito
157. Calcule la probabilidad de ruina ψpuq para u 0, 1, 2, 3, 4, 5 en elmodelo de riesgo a tiempo discreto cuando las reclamaciones tienenla distribucion de probabilidad dada por la siguiente tabla.
y 0 1 2
fpyq 3/4 1/8 1/8
158. Suponga que las reclamaciones en el modelo de riesgo a tiempo dis-creto tienen la siguiente funcion de probabilidad: para algun enterok ¥ 2 fijo,
fp0q 1 p,
fpkq p.

192 7. Teorıa de la ruina: tiempo discreto
Demuestre que:
a) ψpuq p
1 p
k u
u1
y1
ψpu yq
para 1 ¤ u k.
b) ψpuq p
1 p
k1
y1
ψpu yq para u ¥ k.
159. A partir de la formula recursiva para la probabilidad de ruina ψpuq
en el proceso de riesgo a tiempo discreto que aparece en el enunciadode la Proposicion 7.1, demuestre que:
a) ψpu 1q ¤ ψpuq.
b) lımuÑ8
ψpuq 0.
160. Hemos demostrado que la funcion u ÞÑ ψpuq satisface la ecuacionrecursiva dada en la Proposicion 7.1. Demuestre que esta ecuacionrecursiva tiene una unica solucion. Sugerencia: suponga que ψ1puq yψ2puq son dos funciones que cumplen las propiedades que se enun-cian en la Proposicion 7.1. Use induccion sobre u para demostrarque ψ1puq ψ2puq 0 , u ¥ 0.
Probabilidad de ruina con horizonte finito
161. Calcule la probabilidad de ruina con horizonte finito ψpu, nq parau 1 y n 1, 2, 3, 4, 5 en el modelo de riesgo a tiempo discre-to, cuando las reclamaciones tienen la distribucion de probabilidaddada por la siguiente tabla.
y 0 1 2
fpyq 4/10 5/10 1/10

7.7. Ejercicios 193
Coeficiente de ajuste
162. Calcule el coeficiente de ajuste para el modelo de riesgo a tiempodiscreto cuando las reclamaciones tienen la distribucion de proba-bilidad dada por la siguiente tabla.
y 0 1 2
fpyq 1/3 1/2 1/6
163. Considere el modelo de riesgo a tiempo discreto en donde las recla-maciones tienen distribucion geoppq, es decir, la correspondientefuncion de probabilidad es
fpyq p1 pqyp, y 0, 1, 2, . . .
Recuerde que el valor esperado de esta distribucion es EpY q p1pqp. Para que se cumpla la condicion de ganancia neta EpY q 1se necesita suponer p ¡ 12. Demuestre que el coeficiente de ajustees
R ln
p
1 p
.
164. Suponga que las reclamaciones tienen la siguiente distribucion deprobabilidad
P pY 0q 1 p,
P pY 3q p.
Suponga ademas que p 13, con esta restriccion se cumple lacondicion de ganancia neta EpY q 1 en el modelo de riesgo atiempo discreto. Demuestre que el coeficiente de ajuste es
R ln
pa
p2 4pp1 pq
2p
.

194 7. Teorıa de la ruina: tiempo discreto
165. Sea k ¥ 2 un entero fijo. Considere el modelo de riesgo a tiempodiscreto en donde las reclamaciones tienen funcion de probabilidad
fp0q 1 p,
fpkq p.
Suponga que p 1k. Con esta hipotesis se cumple la condicionde ganancia neta EpY q 1. Demuestre que el coeficiente de ajustees R lnx, en donde x es la unica solucion mayor a uno de laecuacion
pxk1 pxk2
p 1 0.
166. Para el proceso de riesgo a tiempo discreto tCn : n ¥ 0u con capitalinicial u ¥ 0 y suponiendo que el coeficiente de ajuste R existe,demuestre que para cualquier n ¥ 0,
EpeRCnq eRu.
Desigualdad de Lundberg
167. Considere los datos del modelo que aparece en el Ejemplo 7.1, endonde se calcularon explıcitamente las probabilidades ψpuq parau 0, 1, . . . , 11. Demuestre que el coeficiente de ajuste es
R lnp106q 0.5108256238 .
Para los valores de u indicados, verifique que efectivamente se cumplela desigualdad de Lundberg ψpuq ¤ eRu. El uso de una hoja decalculo podrıa ser util para realizar estas verificaciones.
Severidad de la ruina
168. Propiedades. A partir de la definicion de la funcion ϕpu, zq de-muestre que:
a) u ÞÑ ϕpu, zq es decreciente.
b) z ÞÑ ϕpu, zq es creciente.

7.7. Ejercicios 195
c) ϕpu, zq ¤ ψpuq.
d) lımzÑ8
ϕpu, zq ψpuq.
169. Severidad con horizonte finito. Para cada entero u 0, 1, 2, . . . yz 0, 1, . . . se define la severidad de la ruina con horizonte finitocomo la funcion
ϕpu, z;nq P pτ ¤ n,Cτ ¤ zq.
Demuestre que:
a) ϕpu, z; 1q F pu z 1q F puq.
b) ϕpu, z;nq ϕpu, z; 1qu
y0
ϕpu 1 y, z;n 1q fpyq, n ¥ 2.


Capıtulo 8
Teorıa de la ruina:tiempo continuo
En este capıtulo se presenta una version a tiempo continuo del proceso deriesgo conocida como el modelo clasico de Cramer-Lundberg. Encontraremosque la probabilidad de ruina para este modelo satisface una ecuacion inte-gral. Estudiaremos ademas algunos otros resultados relacionados al calculoy estimacion de la probabilidad de ruina.
8.1. Modelo clasico de Cramer-Lundberg
El modelo de Cramer-Lundberg es una version a tiempo continuo del modeloa tiempo discreto que estudiamos en el capıtulo anterior y tiene sus orıgenesen la tesis doctoral de Filip Lundberg defendida en el ano de 1903. En estetrabajo, Lundberg analiza el reaseguro de riesgos colectivos y presenta elproceso de Poisson compuesto. Lundberg utilizo terminos un tanto distintosa los actuales pues en aquellos anos aun no se habıa formalizado la teorıa delos procesos estocasticos como la entendemos hoy en dıa. En 1930 HaraldCramer retoma las ideas originales de Lundberg y las pone en el contexto delos procesos estocasticos, en ese entonces de reciente creacion. El modelo hasido estudiado en extenso, y varias formas de generalizarlo se han propuestoy analizado.
197

198 8. Teorıa de la ruina: tiempo continuo
Ernest Filip Oskar Lundberg
(Suecia, 1876–1965)
Carl Harald Cramer
(Suecia, 1893–1985)
Definicion 8.1 El modelo clasico de Cramer-Lundberg es el proceso es-tocastico a tiempo continuo tCt : t ¥ 0u dado por
Ct u c t
Nt
j1
Yj , (8.1)
en donde u y c son constantes positivas, Y1, Y2, . . . es una sucesion dev.a.i.i.d. positivas e independientes del proceso de Poisson tNt : t ¥ 0ude parametro λ.
La constante u representa el capital inicial de la companıa aseguradora, ctcorresponde a la entrada por primas hasta el tiempo t, Yj es el monto de laj-esima reclamacion, y el proceso de Poisson tNt : t ¥ 0u modela la formaen la que las reclamaciones son recibidas. Observe que para un proceso dereclamaciones con distribucion Poisson compuesta como en la ecuacion (8.1),la esperanza es justamente de la forma ct, y el principio del valor esperadopara el calculo de primas lleva a que el proceso de primas sea lineal comoel sugerido en el modelo. La variable Ct representa el balance mas sencillode ingresos menos egresos a tiempo continuo de una companıa aseguradora.Al proceso tCt : t ¥ 0u se le llama nuevamente proceso de riesgo (risk

8.1. Modelo clasico de Cramer-Lundberg 199
process), o proceso de superavit (surplus process), y tiene trayectorias comose muestra en la Figura 8.1.
EpCtq
bc
b
b
bc
b
bc
b
bc
b
bc
b
u
t
Ctpωq
Figura 8.1
Estas trayectorias comienzan siempre en el capital inicial u. Los intervalosen donde estas trayectorias son continuas y crecientes corresponden a pe-riodos en donde no hay reclamaciones. El crecimiento es de la forma ct. Lasdiscontinuidades son siempre saltos hacia abajo, y aparecen en el momentoen que se efectua una reclamacion, la cual supondremos que se paga de ma-nera inmediata. El tamano de un salto es el tamano de la reclamacion dadapor la variable Y . Hemos supuesto que los montos Y1, Y2, . . . son variablesaleatorias independientes, positivas e identicamente distribuidas, y en al-gunas ocasiones supondremos que tienen funcion generadora de momentosMY prq. Los momentos, cuando existan, se denotaran nuevamente por
µn EpY nq, n ¥ 1.
En particular µ denotara el primer momento µ1. No es difıcil comprobarque
EpCtq u pc λµqt,
VarpCtq λµ2 t.
Usando la independencia de las reclamaciones en el proceso de riesgo yla estacionariedad de los incrementos en el proceso de Poisson, puede de-mostrarse que el proceso de riesgo tCt : t ¥ 0u tiene incrementos indepen-dientes y estacionarios.

200 8. Teorıa de la ruina: tiempo continuo
La condicion de ganancia neta
Sean T0, T1, T2, . . . los tiempos aleatorios (tiempos de paro) en donde la ase-guradora recibe las reclamaciones. Supondremos T0 0. Para cada enterok ¥ 1 defina la variable aleatoria Xk c pTkTk1qYk, que puede ser in-terpretada como el balance de la companıa aseguradora entre dos siniestrossucesivos. La esperanza de esta variable es
EpXkq cEpTk Tk1q EpYkq
c
1
λ
µ.
Si denotamos por Crks al proceso de riesgo al momento de la k-esima recla-
macion, entonces tenemos que
Crks u
k
j1
Xk.
De modo que por la ley de los grandes numeros,
lımkÑ8
1
kCrks lım
kÑ8
1
k
u
k
j1
Xk
EpXkq
c
1
λ
µ.
De la misma forma que se argumento en el capıtulo sobre los principiosgenerales para el calculo de primas, se puede demostrar que la ruina ocurrecasi seguramente si y solo si, EpXkq ¤ 0. Como deseamos que esta situacionno ocurra supondremos que EpXkq ¡ 0, es decir, tenemos la hipotesis:
Condicion de ganancia neta c ¡ λµ
Esta condicion ya la habıamos mencionado antes en otros modelos. Ahorala interpretamos para el proceso de riesgo a tiempo continuo de la siguienteforma: la entrada por primas por unidad de tiempo, c, es mayor que el totalde reclamaciones promedio por unidad de tiempo, λµ.

8.1. Modelo clasico de Cramer-Lundberg 201
Ruina
La trayectoria promedio de este proceso de riesgo es la lınea recta que iniciaen u ¡ 0 y tiene pendiente c λµ, la cual es positiva por la condicion ohipotesis de ganancia neta. Vease la Figura 8.1. Por razones naturales ylegales es importante que Ct permanezca por arriba de cierto nivel mınimo.Supongamos que tal nivel mınimo es a, con 0 a u. Ajustando el capitalinicial u, esto es, suponiendo un nuevo capital inicial de magnitud u a, sepuede suponer, sin perdida de generalidad, que este nivel mınimo es cero, yası lo haremos en nuestro analisis. De esta forma cuando Ct 0 para algunt ¡ 0 se dice que hay ruina.
Definicion 8.2 Se dice que el proceso de riesgo se encuentra en ruina altiempo t ¡ 0 si
Ct 0,
y se define el tiempo de ruina τ como el primer momento en que la ruinase presenta, es decir,
τ ınf tt ¡ 0 : Ct 0u. (8.2)
Nuevamente definiremos τ 8 cuando el conjunto indicado en la expre-sion (8.2) es vacıo y corresponde a la situacion cuando la ruina nunca sepresenta. Observe que hemos definido ruina en el modelo a tiempo continuocuando ocurre el evento pCt 0q, a diferencia del evento pCn ¤ 0q parael modelo discreto estudiado en el capıtulo anterior. La ruina casi nuncasucede en la practica, es solamente un termino tecnico que produce algunatoma de decision. Por ejemplo, si el capital de una companıa aseguradoraasignado a una cartera decrece en forma significativa, automaticamente laaseguradora puede tomar ciertas medidas para subsanar esta situacion y nose trata de un evento insalvable. Por otro lado, es natural suponer que lacompanıa aseguradora posea varios portafolios de modo que ruina en unode ellos no significa necesariamente bancarrota que el termino ruina podrıasugerir.
En las siguientes secciones nos interesara calcular o estimar probabilidades

202 8. Teorıa de la ruina: tiempo continuo
de ruina en el modelo de Cramer-Lundberg. De manera analoga al modelode riesgo a tiempo discreto presentado en el capıtulo anterior, denotaremosa la probabilidad de ruina con horizonte infinito en el modelo de Cramer-Lundberg como ψpuq, es decir,
ψpuq P pτ 8 |C0 uq.
Y no habra ambiguedad en su definicion pues el modelo o contexto en el quese estudia determinara el caso correspondiente. Nuevamente escribiremos aesta probabilidad como funcion del capital inicial u, aunque en realidaddepende de todos los parametros del modelo. Y observamos ademas, sinproveer una demostracion, la monotonıa decreciente de esta funcion, es decir,si u1 ¤ u2, entonces
ψpu1q ¥ ψpu2q.
Para deducir una ecuacion para la probabilidad de ruina ψpuq tomaremoscomo preliminarme cierto el hecho de que cuando el capital inicial es infinitola probabilidad de ruina es cero, es decir,
ψp8q lımuÑ8
ψpuq 0.
Mas adelante daremos una demostracion de este resultado y corroboraremossu validez usando la desigualdad de Lundberg en el caso cuando el coefi-ciente de ajuste existe. Como en el capıtulo anterior, usaremos la siguientenomenclatura.
Notacion ψpuq : 1 ψpuq
8.2. Probabilidad de ruina con horizonte infinito
Presentaremos a continuacion tres resultados generales sobre la probabilidadde ruina con horizonte infinito. A diferencia del primer capıtulo, y para hacerla notacion mas apegada a la literatura existente en el tema, recordemos queestamos denotando por F pyq a la funcion de distribucion de una reclamacionY cualquiera. La funcion de densidad sera fpyq, cuando esta exista.

8.2. Probabilidad de ruina con horizonte infinito 203
Proposicion 8.1 Suponga que la funcion de distribucion F pyq de unareclamacion en el modelo de Cramer-Lundberg es continua. Entonces
1.d
duψpuq
λ
c
ψpuq
» u
0
ψpu yq dF pyq
.
2. ψp0q λµ
c.
3. ψpuq λ
c
»
8
u
F pyq dy
» u
0
ψpu yqF pyq dy
.
Demostracion. Usaremos analisis del primer paso condicionando sobreel monto de la primera reclamacion Y1 y el momento T1 en el que estareclamacion ocurre. Usaremos ademas el hecho de que T1 tiene distribucionexppλq.
ψpuq P p “No ruina en p0,8q” |C0 uq
»
8
0
»
8
0
P p “No ruina en p0,8q” |Y1 y, T1 tq dF pyq fT1ptq dt
»
8
0
» uct
0
P p “No ruina en p0,8q” |Y1 y, T1 tq dF pyq fT1ptq dt
»
8
0
λeλt
» uct
0
P p “No ruina en pt,8q” |Y1 y, T1 tq dF pyq dt
»
8
0
λeλt
» uct
0
ψpu ct yq dF pyq dt.
En el analisis anterior hemos separado dos casos para el monto de la primerareclamacion:
p0, u ctq Y pu ct,8q.
Cuando el monto de esta primera reclamacion excede el capital u ct,hay ruina y por lo tanto la probabilidad que no ruina es cero. Cuandola reclamacion es menor o igual a u ct, no hay ruina y por lo tanto laprobabilidad de no ruina en p0,8q se reduce a la probabilidad de no ruina

204 8. Teorıa de la ruina: tiempo continuo
desde el tiempo t en adelante pero con capital inicial u ct y, esto esψpu ct yq. Haciendo el cambio de variable sptq u ct en la ultimaecuacion se obtiene
ψpuq λ
ceλuc
»
8
u
eλsc
» s
0
ψps yq dF pyq ds.
A partir de esta formula se puede verificar que la funcion u ÞÑ ψpuq es dife-renciable. Ası, derivando esta expresion se encuentra el resultado del primerinciso. Demostraremos a continuacion el segundo resultado. Integrando laecuacion diferencial del primer inciso entre 0 y u se obtiene
ψpuq ψp0q
λ
c
» u
0
ψpxqdx
» u
0
» x
0
ψpx yq dF pyq dx
λ
c
» u
0
ψpxqdx
» u
0
» u
y
ψpx yq dx dF pyq
λ
c
» u
0
ψpxqdx
» u
0
» uy
0
ψpxq dx dF pyq
λ
c
» u
0
ψpxqdx
» u
0
» ux
0
ψpxq dF pyq dx
λ
c
» u
0
ψpxqF pu xq dx.
Haciendo el cambio de variable y u x se obtiene
ψpuq ψp0q
λ
c
» u
0
ψpu yqF pyq dy (8.3)
λ
c
»
8
0
ψpu yqF pyq 1r0,uspyq dy.
El siguiente paso es hacer u tender a infinito. En tal caso, ψpuq tiende auno. Ademas el integrando que aparece en el lado derecho es una funcionmonotona creciente en u y cuyo lımite es la funcion integrable F pxq. En-tonces por el teorema de convergencia monotona se obtiene
1 ψp0q λ
c
»
8
0
F pyq dy λµ
c.

8.2. Probabilidad de ruina con horizonte infinito 205
Por lo tanto,
ψp0q 1 ψp0q λµ
c. (8.4)
De esta forma se obtiene el segundo resultado. Finalmente de (8.3) y (8.4)se sigue que
ψpuq
λ
c
µ
» u
0
ψpu yqF pyq dy
λ
c
»
8
u
F pyqdy
» u
0
ψpu yqF pyq dy
.
¥
Observe que la ultima expresion corresponde a una ecuacion ıntegro diferen-cial para la probabilidad de ruina. En general no es facil resolver este tipo deecuaciones, sin embargo, cuando las reclamaciones tienen distribucion expo-nencial la ecuacion es soluble como se muestra en un ejemplo mas adelante.Para resolver la ecuacion observamos primero que mediante un cambio devariable en la integral de la primera formula de la Proposicion 8.1 se obtiene
d
duψpuq
λ
c
ψpuq
» u
0
ψpyq fpu yq dy
. (8.5)
En el texto de Rolski et al. [32] se pueden encontrar los detalles de la de-mostracion de la diferenciabilidad de la funcion u ÞÑ ψpuq, por simplicidadhemos supuesto tal propiedad en nuestros argumentos. Por otro lado, enel texto de Embrechts et al [14] puede encontrarse una argumentacion masformal sobre la propiedad de renovacion del proceso de riesgo en los tiemposaleatorios en los que ocurre una reclamacion. Esta propiedad fue utilizadaen la demostracion anterior y nos ayudo a encontrar una ecuacion ıntegrodiferencial para la probabilidad de ruina.
Ejemplo 8.1 (Reclamaciones exponenciales) Encontraremos la proba-bilidad de ruina cuando las reclamaciones son exponenciales. Este es unode los pocos modelos para los cuales tal probabilidad puede encontrarse demanera explıcita. Consideremos entonces el modelo de Cramer-Lundbergen donde las reclamaciones tienen distribucion exppαq y cuya esperanza es

206 8. Teorıa de la ruina: tiempo continuo
µ 1α. Por la ecuacion (8.5),
ψ 1
puq λ
c
ψpuq eαu
» u
0
ψpyqαeαy dy
.
Derivando esta expresion y sustituyendola nuevamente en la ecuacion en-contrada se obtiene
ψ 2
puq
λ
c α
ψ 1
puq,
cuya solucion es ψpuq a bepαλcqu, en donde a y b son constantes.Usando las condiciones ψp0q λpαcq y ψp8q 0 se encuentra que a 1y b λpαcq. Por lo tanto,
ψpuq λ
αcepαλcqu.
La grafica de esta funcion se encuentra en la Figura 8.2. Observe que debidoa la condicion de ganancia neta, el exponente pαλcq es negativo, y porlo tanto la probabilidad de ruina decae a cero exponencialmente cuando elcapital inicial u crece a infinito.
λ
αc
ψpuq
u
Figura 8.2
Demostraremos a continuacion que la probabilidad de ruina se anula cuandoel capital inicial es infinito. La tecnica de la demostracion es similar a lapresentada en el modelo de riesgo a tiempo discreto.

8.2. Probabilidad de ruina con horizonte infinito 207
Proposicion 8.2 Para el modelo de de Cramer-Lundberg y bajo la condi-cion de ganancia neta,
lımuÑ8
ψpuq 0.
Demostracion. Por la ley fuerte de los grandes numeros y la condicionde ganancia neta tenemos que
lımtÑ8
1
tCt lım
tÑ8
1
tpu ct
Nt
j1
Yjq
c lımtÑ8
1
t
Nt
j1
Yj
c p lımtÑ8
Nt
tqp lım
tÑ8
1
Nt
Nt
j1
Yjq
c λµ ¡ 0.
Para el primer lımite hemos usado uno de los resultados que establece lavelocidad de crecimiento del proceso de Poisson, esto es, que Ntt convergecasi seguramente al parametro λ cuando t Ñ 8. Para el segundo lımitehemos usado una extension del teorema central del lımite. De esta formaconcluimos nuevamente que la v.a. Ct diverge a infinito casi seguramentecuando tÑ8. En consecuencia, la variable ınft¥0 Ct esta acotada por abajocasi seguramente. Por lo tanto, tomando un capital inicial u suficientementegrande, la cota inferior de ınft¥0 Ct puede hacerse igual a cero, es decir,
ınft¥0
Ct ¥ 0.
Esto quiere decir que ψpuq 0 cuando uÑ8. ¥

208 8. Teorıa de la ruina: tiempo continuo
8.3. Probabilidad de ruina con horizonte finito
Dado un valor x ¡ 0 fijo, la probabilidad de ruina en el intervalo p0, xs otambien llamada probabilidad de ruina con horizonte finito es
ψpu, xq P pτ ¤ x |C0 uq,
y corresponde a la funcion de distribucion del tiempo de ruina. Es claro quecuando 0 x1 ¤ x2, se cumplen las desigualdades
ψpu, x1q ¤ ψpu, x2q ¤ ψpuq.
Ademas, cuando el horizonte x crece a infinito, en el lımite la probabilidadcon horizonte finito converge a la probabilidad con horizonte infinito, esdecir,
ψpuq lımxÑ8
ψpu, xq.
Mientras que cuando el capital inicial es infinito y como consecuencia delresultado lımuÑ8
ψpuq 0, la probabilidad de ruina con horizonte finitotambien es cero, es decir, para cualquier x ¡ 0,
lımuÑ8
ψpu, xq ¤ lımuÑ8
ψpuq 0.
Nuevamente, usaremos la siguiente nomenclatura.
Notacion ψpu, xq : 1 ψpu, xq
Encontraremos a continuacion una ecuacion integral para la probabilidadde ruina con horizonte finito. El analisis es mas elaborado que en el casocon horizonte infinito. A la formula explıcita para ψp0, xq que aparece enla siguiente proposicion y a la ecuacion integral para ψpu, xq se les conocecomo formulas de Seal.

8.3. Probabilidad de ruina con horizonte finito 209
Proposicion 8.3 (Formulas de Seal) Considere el proceso de riesgo deCramer-Lundberg Ct uctSptq, en donde Sptq
°Nt
j1Yj. Suponga que
las reclamaciones tienen distribucion absolutamente continua con funcionde densidad fpyq y defina la funcion
fSptqpyq eλt8
¸
n1
pλtqn
n!fnpyq.
Entonces
1. FSptqpxq eλt
» x
0
fSptqpyq dy, x ¥ 0.
2. ψp0, xq 1
cx
» cx
0
FSpxqpyq dy.
3.B
Buψpu, xq
λ
c
ψpu, xq
» u
0
ψpu y, xq dF pyq 1
λ
B
Bxψpu, xq
.
4. ψpu, xq FSpxqpu cxq c
» x
0
ψp0, x yq fSpyqpu cyq dy.
Demostracion. La primera identidad se obtiene condicionando sobre elnumero de reclamaciones: para cualquier x ¥ 0,
FSptqpxq P pSptq ¤ xq
8
¸
n0
P pSptq ¤ x |Nt nqP pNt nq
eλt
8
¸
n1
eλt pλtqn
n!
» x
0
fnpyq dy.

210 8. Teorıa de la ruina: tiempo continuo
Para la segunda identidad, suponiendo que el capital inicial u es cero, tene-mos que
ψp0, xq P pτ ¡ xq
P p£
t¤x
pCt ¥ 0q q
P p£
t¤x
pSptq ¤ ctq q
»
8
0
P p£
t¤x
pSptq ¤ ctq |Spxq yq fSpxqpyq dy
Puede demostrarse que
P p£
t¤x
pSptq ¤ ctq |Spxq yq 1
cxpcx yq
.
Recordemos la notacion
x
"
x si x ¥ 0,0 si x 0.
Por lo tanto,
ψp0, xq
1
cx
»
8
0
pcx yq
fSpxqpyq dy
1
cxEpcx Spxqq
1
cx
»
8
0
y dFcxSpxqpyq dy
1
cx
» cx
0
y dFcxSpxqpyq dy.
Aplicando integracion por partes,
ψp0, xq
1
cx
y FcxSpxqpyq
cx
0
» cx
0
FcxSpxqpyq dy
1
cx
cx
» cx
0
P pSpxq ¡ vq dv
1
cx
» cx
0
FSpxqpvq dv.

8.3. Probabilidad de ruina con horizonte finito 211
Esto demuestra la segunda identidad. Para la tercera identidad usaremosanalisis del primer paso condicionando sobre el monto de la primera recla-macion Y1 y el momento T1 en el que esta reclamacion ocurre. Usaremosademas el hecho de que T1 tiene distribucion exppλq.
ψpu, xq P p “No ruina en p0, xs” |C0 uq
»
8
0
»
8
0
P p “No ruina en p0, xs” |Y1 y, T1 tq dF pyq fT1ptq dt
» x
0
»
8
0
P p “No ruina en p0, xs” |Y1 y, T1 tq dF pyq fT1ptq dt
»
8
x
»
8
0
P p “No ruina en p0, xs” |Y1 y, T1 tq dF pyq fT1ptq dt.
Observe que hemos separado dos casos: uno cuando la primera reclamacionocurre al tiempo t dentro del intervalo p0, xs y el otro cuando ocurre despuesde x. En el primer caso la probabilidad del evento de interes es distinta decero cuando la reclamacion es menor o igual a u ct. En el segundo caso laprobabilidad del evento es uno. Por lo tanto,
ψpu, xq
» x
0
» uct
0
P p “No ruina en p0, xs” |Y1 y, T1 tq dF pyq fT1ptq dt
»
8
x
»
8
0
dF pyq fT1ptq dt
» x
0
λeλt
» uct
0
ψpu ct y, x tq dF pyq dt P pT1 ¡ xq.
Haciendo el cambio de variable sptq u ct se obtiene
ψpu, xq eλuc» ucx
u
λeλsc
» s
0
ψps y, x ps uqcq dF pyq1
cds eλx.
Derivando esta expresion respecto de u y respecto de x puede verificarse elcumplimiento de la ecuacion integro diferencial
B
Buψpu, xq
λ
c
ψpu, xq
» u
0
ψpu y, xq dF pyq 1
λ
B
Bxψpu, xq
. (8.6)

212 8. Teorıa de la ruina: tiempo continuo
Para encontrar la cuarta identidad reescribiremos esta ecuacion en termi-nos de la transformada de Laplace. Recordemos que la expresion Lψps, xq
denotara la transformada de Laplace de la funcion u ÞÑ ψpu, xq, es decir,
Lψps, xq
»
8
0
esu ψpu, xq du.
Ası, calculando la transformada de Laplace termino a termino de la ecuaciondiferencial (8.6) se obtiene
sLψps, xq ψp0, xq λ
c
Lψps, xq Lψps, xqLf psq 1
λ
B
BxLψps, xq
.
O bien,
B
BxLψps, xq Lψps, xq pcs λpLf psq 1qq cψp0, xq.
De esta forma la derivada respecto de la variable u en la ecuacion diferencialparcial (8.6) ha sido absorbida por la transformada de Laplace y hemosobtenido una ecuacion diferencial ordinaria en la variable x. La soluciongeneral de esta ecuacion diferencial es
Lψps, xq
a
» x
0
ψp0, yq c epcsλpLf psq1qqy dy
epcsλpLf psq1qqx, (8.7)
en donde a es una constante. Evaluando en x 0 se obtiene que estaconstante es
a Lψps, 0q
»
8
0
esu ψpu, 0q du
»
8
0
esu du 1
s.
Ası, la ecuacion (8.7) adquiere la forma
Lψps, xq 1
sepcsλpLf psq1qqx
» x
0
ψp0, yq c epcsλpLf psq1qqpxyq dy. (8.8)
Demostraremos que los dos terminos del lado derecho son tambien una trans-formada de Laplace. Despues de algunos calculos pueden comprobarse lossiguientes resultados:

8.4. Severidad de la ruina 213
a) LrFSpxqpuqspsq 1
seλ pLf psq1qx.
b) LrFSpxqpu cxqspsq 1
sepcsλ pLf psq1qqx.
c) LrfSpxqpu cxqspsq epcsλ pLf psq1qqx.
Ası, el inciso (b) muestra que el primer sumando de (8.8) es la transformadade Laplace de u ÞÑ FSpxqpu cxq, y por el inciso (c) el segundo sumando es
» x
0
ψp0, yq c
LrfSpxyqpu cpx yqqspsq
dy
» x
0
ψp0, yq c
»
8
0
esv fSpxyqpu cpx yqq du
dy
»
8
0
esv c
» x
0
ψp0, x zq fSpzqpu czq dz du.
Por lo tanto, cada termino de la ecuacion (8.8) es una transformada deLaplace. Por la propiedad de unicidad, las funciones originales deben coin-cidir, y ası es como se obtiene la ultima ecuacion de la proposicion. ¥
Observe que la funcion x ÞÑ ψpu, xq es monotona decreciente y tiene comolımite la probabilidad ψpuq cuando xÑ8. Ası, suponiendo valido el inter-cambio de este lımite con la derivada respecto de x, la ecuacion diferencialencontrada para ψpu, xq se reduce a la ecuacion para ψpuq.
8.4. Severidad de la ruina
Consideremos nuevamente el proceso de riesgo tCt : t ¥ 0u con capitalinicial u. En esta seccion nos convendra escribir la variable Ct como Cptq.Supongamos que estamos en la situacion cuando el tiempo de ruina τ esfinito. En este caso podemos considerar las siguientes variables aleatorias
X : Cpτq,
Z : Cpτq.
Estas cantidades representan, respectivamente, el valor del proceso de riesgoun instante antes de la ruina y el valor del proceso justo en el momento dela ruina. Las variables X y Z se muestran graficamente en la Figura 8.3.

214 8. Teorıa de la ruina: tiempo continuo
bc
b
b
bc
b
bc
b
X
Z
τ
u
t
Ctpωq
Figura 8.3
Como antes, a la variable Z le llamaremos severidad de la ruina. El problemaque se plantea ahora es el de encontrar la probabilidad conjunta
ϕpu, x, zq P pτ 8, X ¡ x, Z ¡ zq,
para cualesquiera x ¥ 0, z ¥ 0. Es claro que esta probabilidad es unaversion mas elaborada que la probabilidad de ruina ψpuq P pτ 8q y quese cumplen las siguientes relaciones:
ϕpu, x, zq ¤ ϕpu, 0, zq,
ϕpu, x, zq ¤ ϕpu, x, 0q,
ϕpu, x, zq ¤ ψpuq,
ϕpu, 0, 0q ψpuq.
Como es de esperarse, no se cuenta con una formula explıcita para ϕpu, x, zq,pero encontraremos una ecuacion integral para esta probabilidad. La de-mostracion de la ecuacion integral para ϕpu, x, zq sigue la misma tecnicaque la que se presento para el caso de la probabilidad de ruina, es decir,condicionaremos sobre el monto y el momento de la primera reclamacion.Observemos que la probabilidad ϕpu, x, zq se anula cuando el capital inicialcrece a infinito, es decir
lımuÑ8
ϕpu, x, zq ¤ lımuÑ8
ψpuq 0.

8.4. Severidad de la ruina 215
Proposicion 8.4 Suponga que la funcion de distribucion F pyq de las recla-maciones en el modelo de Cramer-Lundberg es continua. Entonces, parax ¥ 0, y z ¥ 0,
1.d
duϕpu, x, zq
λ
c
ϕpu, x, zq
» u
0
ϕpu y, x, zq dF pyq
1pu¡xq F pu zq
.
2. ϕp0, x, zq λ
c
»
8
xz
F pyq dy.
3. ϕpu, x, zq λ
c
»
8
uz
F pyq dy
» u
0
ϕpu y, x, zqF pyq dy
1pu xq
» uz
xz
F pyq dy
.
Demostracion. Usaremos nuevamente analisis del primer paso condicio-nando sobre el monto y momento de la primera reclamacion. Dado un valort para el momento de la primera reclamacion, separaremos tres conjuntospara el monto de dicha reclamacion:
p0, u ctq Y pu ct, u ct zq Y pu ct z,8q.
En el primer caso no hay ruina y la probabilidad buscada se reduce a laprobabilidad del mismo evento pero ahora con capital inicial u ct y. Enel segundo caso hay ruina pero no es severa en el sentido de que no se cumpleque Z ¡ z y por lo tanto la probabilidad ϕpu, x, zq es cero. En el tercer casohay ruina y se cumple la condicion Z ¡ z, ası es que la probabilidad buscada

216 8. Teorıa de la ruina: tiempo continuo
se reduce a 1puct¡xq. Ası, tenemos que
ϕpu, x, zq
»
8
0
»
8
0
P pτ 8, X ¡ x, Z ¡ z |T1 t, Y1 yq dF pyq dFT1ptq
»
8
0
λeλt
» uct
0
ϕpu ct y, x, zq dF pyq dt
»
8
0
λeλt
»
8
uctz
1puct¡xq dF pyq dt.
Por lo tanto,
ϕpu, x, zq
»
8
0
λeλt
» uct
0
ϕpu ct y, x, zq dF pyq dt
»
8
0
λeλt 1puct¡xq F pu ct zq dt.
Efectuando el cambio de variable sptq u ct se obtiene
ϕpu, x, yq
1
c
»
8
u
λeλpsuqc
» s
0
ϕps y, x, zq dF pyq ds
»
8
u
λeλpsuqc 1ps¡xq F ps zq ds
.
Derivando esta expresion respecto de u se encuentra el resultado del primerinciso. Escribiendo w por u en la ecuacion diferencial encontrada e integran-do entre 0 y u se obtiene
ϕpu, x, yq ϕp0, x, yq
λ
c
» u
0
ϕpw, x, zq dw
» u
0
» w
0
ϕpw y, x, zq dF pyq dw
» u
0
1pw¡xqF pw zq dw
,

8.4. Severidad de la ruina 217
en donde la integral doble puede escribirse de la siguiente forma» u
0
» w
0
ϕpw y, x, zq dF pyq dw
» u
0
» u
y
ϕpw y, x, zq dw dF pyq
» u
0
» uy
0
ϕpv, x, zq dv dF pyq
» u
0
» uv
0
ϕpv, x, zq dF pyq dv
» u
0
ϕpv, x, zqF pu vq dv.
Observe ademas que» u
0
1pw¡xqF pw zq dw 1
pu¥xq
» u
x
F pw zq dw.
Por lo tanto,
ϕpu, x, zq ϕp0, x, zq
λ
c
» u
0
ϕpv, x, zqp1 F pu vqq dv
1pu¥xq
» u
x
F pw zq dw
λ
c
» u
0
ϕpv, x, zqF pu vq dv
1pu¥xq
» uz
xz
F pyq dy
λ
c
» u
0
ϕpu y, x, zqF pyq dy
1pu¥xq
» uz
xz
F pyq dy
. (8.9)
Haciendo u tender a infinito, ϕpu, x, zq Ñ 0 y no es difıcil demostrar que laprimera integral se anula. Por lo tanto se obtiene la identidad
ϕp0, x, zq λ
c
»
8
xz
F pyq dy. (8.10)
Este el segundo inciso del enunciado. Sustituyendo (8.10) en la ecuacion (8.9)y simplificando se obtiene el tercer inciso del enunciado. ¥

218 8. Teorıa de la ruina: tiempo continuo
Observe que tomando x 0 y z 0, la ecuacion integral para ϕpu, x, zq
se reduce a la ecuacion integral para la probabilidad de ruina con horizonteinfinito ψpuq, es decir,
ψpuq ϕpu, 0, 0q λ
c
»
8
u
F pyq dy
» u
0
ϕpu y, 0, 0qF pyq dy
.
Esta es la tercera ecuacion de la Proposicion 8.1. Ademas suponiendo cadacaso por separado, x 0 o y 0, se obtienen formulas integrales para lasprobabilidades marginales de X y de Z, considerando siempre tiempo deruina finito. Es decir, para la variable Z tenemos que
ϕpu, 0, zq λ
c
»
8
uz
F pyq dy
» u
0
ϕpu y, 0, zqF pyq dy
.
Para la variable X,
ϕpu, x, 0q λ
c
»
8
u
F pyq dy
» u
0
ϕpu y, x, 0qF pyq dy 1pu xq
» u
x
F pyq dy
.
8.5. El coeficiente de ajuste
Como hemos visto en el modelo de riesgo a tiempo discreto en el capıtuloanterior, este coeficiente es un numero que aparece en el problema de cal-cular o estimar probabilidades de ruina. En esta seccion vamos a definir yestudiar este coeficiente para el caso del modelo de riesgo a tiempo continuo.Existen varias maneras de definirlo, una de ellas, un tanto artificial pero quedespues justificaremos, es la siguiente: se define primero la funcion
θprq λpMY prq 1q cr,
en donde MY prq es la funcion generadora de Y . Naturalmente esta funcionesta bien definida para valores de r en donde MY prq existe. En tal caso, θprqes diferenciable y se tiene que sus primeras dos derivadas son:
θ1prq λM 1
Y prq c,
θ2prq λM2
Y prq λEpY 2erY q ¡ 0.
Por lo tanto, θprq es una funcion estrictamente convexa tal que θp0q 0, ypor la condicion de ganancia neta, θ1p0q λµ c 0. Entonces es posible

8.5. El coeficiente de ajuste 219
b b
R
θprq
r
Figura 8.4
que exista un valor r ¡ 0 tal que θprq 0. Una grafica de la funcion θprq
presentando esta situacion se muestra en la Figura 8.4.
Definicion 8.3 A la posible solucion r ¡ 0 de la siguiente ecuacion se lellama coeficiente de ajuste o exponente de Lundberg.
θprq λpMY prq 1q cr 0.
A tal solucion positiva se le denota por R.
Observe que la existencia del coeficiente de ajuste depende de la distribucionde las reclamaciones y los parametros del modelo. Aquellas distribucionespara las cuales el coeficiente de ajuste existe se les llama distribucionescon cola ligera, y la razon de ello es que la funcion de densidad decae acero exponencialmente rapido, asignando probabilidades pequenas a recla-maciones grandes. Mas adelante daremos condiciones para la existencia delcoeficiente de ajuste y formalizaremos la interpretacion de cola ligera para ladistribucion de las reclamaciones. Veremos a continuacion algunos ejemplos.Demostraremos en particular que en el caso de reclamaciones exponenciales,el coeficiente de ajuste existe y es facil calcularlo.
Ejemplo 8.2 (Reclamaciones exponenciales) Suponga que las recla-maciones siguen una distribucion exppαq, es decir, la funcion generadora de

220 8. Teorıa de la ruina: tiempo continuo
momentos es MY prq αpα rq, para r α. Entonces
θprq λ pMY prq 1q cr
λ pα
α r 1q cr
λpr
α rq cr
p
λ
α r cq r.
De modo que θprq es cero cuando r 0, o bien cuando λpα rq c 0.Despejando r de la segunda condicion y escribiendo ahora R como la variablese obtiene R α λc. Mas aun, por lo encontrado antes en el caso dereclamaciones exponenciales, la probabilidad de ruina puede ahora escribirsede la forma siguiente:
ψpuq λ
αcepαλcqu
λ
αceRu
eRu,
en donde la desigualdad es consecuencia de la condicion de ganancia neta.Este tipo de cota superior para la probabilidad de ruina, llamada desigualdadde Lundberg, sera demostrada mas adelante para cualquier distribucion delas reclamaciones para la cual el coeficiente de ajuste exista.
Ejemplo 8.3 (Reclamaciones gama) Suponga que las reclamaciones si-guen una distribucion gamapγ, αq con γ 2. La funcion generadora demomentos es MY prq pαpα rqqγ, para r α. Por lo tanto la funcionθprq correspondiente es
θprq λ
α
α r
γ
1
cr.
La condicion θprq 0 produce la ecuacion cuadratica
cr2 rpλ 2αcq pcα2 2αλq 0,
cuyas raıces son
r 2αc λ
?
λ2 4αcλ
2c.

8.5. El coeficiente de ajuste 221
El caso con raız cuadrada positiva es invalido pues resulta r ¡ α, en efecto,usando la condicion de ganancia neta, c ¡ λp2αq, se obtiene
p2αc λa
λ2 4αcλq2c ¥ p2αc λ
a
λ2 8λ2
q2c
α λc
¡ α.
Por lo tanto la raız con el signo negativo es el coeficiente de ajuste.
Ejemplo 8.4 Aplicaremos el metodo de Newton-Raphson para encontrarde manera aproximada el coeficiente de ajuste cuando las reclamacionessiguen una distribucion gamapγ, αq con γ 3. Vease el Apendice para unaexplicacion breve sobre este metodo numerico. La condicion θprq 0 producela siguiente ecuacion que puede reducirse a una ecuacion cubica en r,
gprq λpα3 pα rq3q crpα rq3 0.
La raız buscada r es tal que por restricciones de la funcion generadora demomentos debe satisfacer 0 r α. Tomaremos α 3, λ 1, y c 2. Sehan escogido estos valores de los parametros por simplicidad pero al mismotiempo cuidando que se verifique la condicion de ganancia neta c ¡ λp3αq.El esquema general de Newton-Raphson es
rn1 rn gprnq
g1prnq.
Mas adelante demostraremos que si el coeficiente de ajuste existe, entonceseste se encuentra siempre dentro del intervalo p0, 2pc λµqpλµ2qq. Veaseel enunciado de la Proposicion 8.9. Con base en este resultado, tomaremoscomo condicion inicial r0 2pc λµqpλµ2q 32. Usando estos datos, laiteracion de Newton-Raphson arroja la siguiente sucesion de valores:
n rn
0 1.5
1 0.8333333
2 0.8405056
3 0.8404738
4 0.8404738

222 8. Teorıa de la ruina: tiempo continuo
Por lo tanto, el coeficiente de ajuste se encuentra muy cercano al valorR 0.8404738 .
El siguiente resultado proporciona una forma equivalente de definir el coe-ficiente de ajuste y permite comprobar su existencia a traves de la determi-nacion de la finitud de una integral.
Proposicion 8.5 Sea F pyq la funcion de distribucion de las reclamacionesen el modelo de Cramer-Lundberg. Sea F pyq 1 F pyq. Entonces laecuacion θprq λpMY prq 1q cr 0 tiene una solucion r ¡ 0 si ysolo si se cumple la identidad
»
8
0
ery F pyq dy c
λ.
Demostracion. Tenemos que
0 θprq
λpMY prq 1q cr
λp
»
8
0
ery dF pyq
»
8
0
dF pyqq cr
λ
»
8
0
pery 1q dF pyq cr
λ
»
8
0
pery 1q dF pyq cr.
Para la ultima igualdad hemos usado el hecho de que dF pxq dF pxq.Integrando ahora por partes tenemos que
0 λ
pery 1qF pyq
8
0
»
8
0
rery F pyq dy
cr.
Usando la hipotesis de existencia de la funcion generadora de momentos dela distribucion F pyq, puede demostrarse que las evaluaciones indicadas en

8.5. El coeficiente de ajuste 223
el primer termino del lado derecho se anulan. Por lo tanto,
0 λr
»
8
0
ery F pyq dy cr.
Despejando la integral se obtiene el resultado enunciado. ¥
Este resultado permite ademas dar una interpretacion de aquellas distribu-ciones de probabilidad para las cuales el coeficiente de ajuste existe: paraque la integral de la proposicion anterior sea finita, la cola de la distribucion,es decir, F pyq, debe decaer a cero lo suficientemente rapido para anular elcomportamiento creciente de la expresion ery dentro de la integral. Estoha originado el termino de cola ligera para aquellas distribuciones para lascuales exista el coeficiente de ajuste.
Definicion 8.4 (Distribucion con cola ligera/pesada) A una dis-tribucion de probabilidad con soporte en el intervalo p0,8q y para la cual
a) existe el coeficiente de ajuste se le llama distribucion con cola ligera.
b) no existe el coeficiente de ajuste se le llama distribucion con colapesada.
Ejemplo 8.5 Usaremos el criterio de la Proposicion 8.5 para demostrarque para la distribucion Burrpc, αq no existe el coeficiente de ajuste. En estecaso la cola de la distribucion esta dada por
F pyq
1
1 yc
α
.
Entonces para cualquier valor de r ¡ 0,»
8
0
ery F pyq dy
»
8
0
ery
1
1 yc
α
dy
»
8
0
ery ycα dy 8.
Por lo tanto la distribucion Burr es una distribucion con cola pesada. Segunel criterio de la Proposicion 8.5, para que exista el coeficiente de ajuste, la

224 8. Teorıa de la ruina: tiempo continuo
cola de la distribucion debe decaer a cero lo suficientemente rapido paraanular el comportamiento creciente del termino ery dentro de la integral.En este ejemplo la cola de la distribucion Burr decae a cero en la formaycα que es insuficiente para hacer que la integral sea finita.
Una distribucion con cola ligera asigna probabilidades muy pequenas a losvalores grandes de la variable aleatoria. Esto puede no ser muy convenientepara modelar algunos riesgos, pues de esa manera se esta subestimando laposibilidad de registrar grandes montos en las reclamaciones. A continuacionmencionamos algunos ejemplos de distribuciones con cola ligera y pesada.
Ejemplo 8.6 (Distribuciones con cola ligera) Las siguientes distribu-ciones tienen como soporte el intervalo p0,8q y tienen funcion generadorade momentos.
a) Distribucion exppαq, parametro α ¡ 0.
F pyq eαy, y ¡ 0.
b) Distribucion gamapγ, αq, parametros γ ¡ 0, α ¡ 0.
fpyq pαyqγ1
Γpγqα eαy, y ¡ 0.
c) Distribucion Weibullpr, αq, parametros α ¡ 0, r ¥ 1.
F pyq epαyqr
, y ¡ 0.
d) Distribucion normal truncada (valor absoluto de Np0, 1q ).
F pyq 2p1 Φpyqq, y ¡ 0.
Ejemplo 8.7 (Distribuciones con cola pesada) Las siguientes distribu-ciones tienen como soporte el intervalo p0,8q y no poseen funcion genera-dora de momentos.
a) Distribucion lognormalpµ, σ2q, parametros µ P R, σ2
¡ 0.
F pyq 1 Φ
ln y µ
σ
, y ¡ 0.
b) Distribucion Paretopa, bq, parametros a ¡ 0, b ¡ 0.
F pyq
b
b y
a
, y ¡ 0.

8.5. El coeficiente de ajuste 225
c) Distribucion Burrpc, αq, parametros c ¡ 0, α ¡ 0.
F pyq
1
1 yc
α
, y ¡ 0.
d) Distribucion Weibullpr, αq, parametros α ¡ 0, 0 r 1.
F pyq epαyqr
, y ¡ 0.
e) Distribucion loggamapγ, αq, parametros γ ¡ 0, α ¡ 0.
fpyq pα ln yqγ1
Γpγqα ypα1q, y ¡ 0.
El siguiente resultado establece condiciones suficientes bajo las cuales elcoeficiente de ajuste existe.
Proposicion 8.6 Suponga que la funcion generadora de momentos Myprq
de las reclamaciones Y en el modelo de Cramer Lundberg es tal que:
a) MY prq 8 para r r para algun r P p0,8s.
b) lımrÕr
MY prq 8.
Entonces existe el coeficiente de ajuste, es decir, existe un unico valor r ¡ 0tal que
θprq λpMY prq 1q cr 0.
Demostracion. Dadas las propiedades que se observaron que posee lafuncion θprq alrededor de r 0, es suficiente demostrar que
lımrÕr
θprq 8.
Se tienen dos casos. Supongamos primero que r 8. Entonces la afirma-cion se obtiene de la segunda hipotesis, pues como λ ¡ 0,
lımrÕr
θprq lımrÕr
λpMY prq 1q cr 8.

226 8. Teorıa de la ruina: tiempo continuo
Supongamos ahora que r 8. Sea y tal que FY py
q 1. Entonces
MY prq
»
8
0
ery dF pyq
» y
0
ery dF pyq
»
8
yery dF pyq
¥
»
8
yery dF pyq
ery
F pyq.
Por lo tanto,
lımrÑ8
θprq lımrÑ8
λpMY prq 1q cr
¥ lımrÑ8
λpery
F pyq 1q cr
8.
¥
No es necesario suponer la existencia del coeficiente de ajuste para observarel comportamiento de cola ligera en una distribucion. Demostraremos a con-tinuacion que la existencia de la funcion generadora de momentos garantizatal comportamiento.
Proposicion 8.7 Sea Y una variable aleatoria positiva con funcion de dis-tribucion F pyq y con funcion generadora de momentos tal que Mprq 8
para algun r ¡ 0. Entonces para cualquier y ¡ 0,
F pyq ¤Mprq ery.

8.6. Desigualdad de Lundberg 227
Demostracion. Por la desigualdad de Markov, vease el Apendice,
F pyq P pY ¡ yq
P perY ¡ eryq
¤
EperY q
ery
Mprq ery.
¥
8.6. Desigualdad de Lundberg
Vamos a demostrar ahora que para aquellas distribuciones de probabilidadque se supongan como distribuciones de las reclamaciones en el modelode Cramer-Lundberg y para las cuales el coeficiente de ajuste R existe, secumple la desigualdad
ψpuq ¤ eRu.
Existen varias formas de demostrar este resultado. El metodo que pre-sentaremos hace uso de la teorıa de martingalas.
Proposicion 8.8 Sea tCt : t ¥ 0u el proceso de riesgo de Cramer-Lundbergen donde la distribucion de las reclamaciones tienen a MY ptq como funciongeneradora de momentos. Sea θprq λpMY prq 1q cr. Entonces el si-guiente proceso es una martingala:
t erCtθprqt : t ¥ 0 u.
Demostracion. La adaptabilidad del proceso es evidente pues implıcita-mente estamos usando la filtracion natural. Acerca de la integrabilidad te-

228 8. Teorıa de la ruina: tiempo continuo
nemos los siguientes calculos
EperCtθprqtq eθprqtEperpuct
°Ntj1 Yjq
q
eθprqtrpuctqEper°Nt
j1 Yjq
eθprqtrpuctqeλtpMY prq1q
8.
Finalmente tenemos la propiedad de martingala. Para 0 ¤ s t y porla propiedad de incrementos independientes y estacionarios del proceso deriesgo,
EperCtθprqt|Fsq eθprqtEperCt
|Fsq
eθprqtEperpCtCsqrCs|Fsq
eθprqtrCsEperpCtCsqq
eθprqtrCsEperpcptsq
°NtjNs1
Yjqq
eθprqtrCsrcptsqEper°Nts
j1 Yjq
eθprqtrCsrcptsqeλptsqpMY prq1q
erCsθprqs.
¥
En particular, si el coeficiente de ajuste existe, es decir, si θpRq 0, entoncesel proceso teRCt : t ¥ 0u es una martingala. Este es el resultado clave parademostrar la cota superior para la probabilidad de ruina.
Teorema 8.1 (Desigualdad de Lundberg) Suponga que el coeficientede ajuste R existe para la distribucion de las reclamaciones en el modelo deriesgo de Cramer-Lundberg. Entonces
ψpuq ¤ eRu.
Demostracion. Sea τ el tiempo de paro correspondiente al tiempo deruina. Como el proceso teRCt : t ¥ 0u es una martingala, se tiene que

8.6. Desigualdad de Lundberg 229
el proceso detenido teRCt^τ : t ¥ 0u tambien es una martingala. Ambosprocesos inician en el valor eRu. Por lo tanto,
eRu eRC0
EpeRCt^τq
EpeRCt^τ| τ ¤ tqP pτ ¤ tq
EpeRCt^τ| τ ¡ tqP pτ ¡ tq
¥ EpeRCt^τ| τ ¤ tqP pτ ¤ tq
EpeRCτ| τ ¤ tqP pτ ¤ tq
»
eRCτ 1pτ¤tq dP
P pτ ¤ tq.
Haciendo tÑ8 monotonamente, el evento pτ ¤ tq converge crecientementeal evento pτ 8q. Usando el teorema de convergencia monotona puededemostrarse que
eRu¥ EpeRCτ
| τ 8qP pτ 8q
¥ Ep 1 | τ 8qP pτ 8q
P pτ 8q
ψpuq.
¥
Con ayuda de la desigualdad de Lundberg confirmamos que la probabilidadde ruina se anula cuando el capital inicial crece a infinito, al menos ensituaciones cuando tal desigualdad es valida.Como hemos visto, el coeficiente de ajuste no siempre existe, y aun cuandoconozcamos su existencia no siempre es facil calcularlo. El siguiente resul-tado proporciona algunas cotas para el valor de este coeficiente, suponiendosu existencia.

230 8. Teorıa de la ruina: tiempo continuo
1
eRu
u
Figura 8.5: Cota superior para la probabilidad de ruina.
Proposicion 8.9 Si el coeficiente de ajuste R existe para la distribucionde probabilidad de las reclamaciones en el modelo de Cramer-Lundberg,entonces
1
Mln
c
λµ
R
2pc λµq
λµ2
,
en donde la primera desigualdad es valida bajo la hipotesis adicional de queY ¤M c.s., para alguna constante M ¡ 0.
Demostracion. Demostraremos primero la cota superior. Consideremosnuevamente la funcion θprq λpMY prq 1q cr, para r ¥ 0. Sabemos queθp0q 0. Derivando esta funcion dos veces se obtiene
θ1prq λM 1
Y prq c,
θ2prq λEpY 2erY q
¡ λEpY 2q
λµ2.
En donde θ1p0q λµ c. Por el teorema fundamental del calculo,
θ1prq θ1p0q
» r
0
θ2psqds
¡ pλµ cq λµ2r.

8.6. Desigualdad de Lundberg 231
Por lo tanto,
θprq θp0q
» t
0
θ1psqds
¡ pλµ cqr 1
2λµ2r
2.
Evaluando la ultima desigualdad en R se obtiene
0 ¡ pλµ cqR
1
2λµ2R
2
r pλµ cq 1
2λµ2R sR.
Como R ¡ 0, la expresion en el parentesis debe ser negativa. Despejando deallı R se obtiene la cota superior anunciada. Demostraremos ahora la cotainferior. Supongamos que Y ¤M c.s. y defina la funcion
hpxq x
MpeRM
1q peRx 1q.
Entonces h2pxq R2eRx 0. Por lo tanto hpxq es una funcion concava
con hp0q hpMq 0. Esto quiere decir que hpxq ¡ 0 para 0 x M , esdecir,
x
MpeRM
1q peRx 1q ¡ 0,
o bien,
peRx 1q ¤
x
MpeRM
1q. (8.11)
Sea gpxq xex ex 1. Entonces g1pxq xex ¡ 0. Por lo tanto gpxq es unafuncion creciente para x ¡ 0, es decir, gpxq ¡ gp0q 0, para x ¡ 0. Por lotanto, xex ex 1 ¡ 0, para x ¡ 0. En particular, evaluando en x RM
se obtiene RMeRM eRM
1 ¡ 0. Entonces
eRM 1
RM eRM . (8.12)

232 8. Teorıa de la ruina: tiempo continuo
Por otro lado, usando (8.11),
MY pRq 1
» M
0
peRx 1q dF pxq
¤
» M
0
x
MpeRM
1q dF pxq
1
MpeRM
1q
» M
0
x dF pxq
µ
MpeRM
1q. (8.13)
Ası, usando (8.13) y luego (8.12),
0 λpMY pRq 1q cR
¤
λµ
MpeRM
1q cR
λµReRM cR
pλµeRM cqR.
Por lo tanto λµeRM c ¡ 0. Despejando finalmente R de esta desigualdad
se obtiene la cota inferior buscada. ¥
Ejemplo 8.8 (Reclamaciones exponenciales) Consideremos nuevamen-te el caso cuando las reclamaciones son exponenciales de parametro α. Sabe-mos que en este caso el coeficiente de ajuste existe y esta dado por
R αλ
c.
Usando la condicion de ganancia neta puede verificarse que efectivamente secumple la cota superior para R demostrada en la Proposicion 8.9, es decir,
R αλ
c
2pc λµq
λµ2
.
Es interesante notar que la cota superior para el coeficiente de ajuste queaparece en la Proposicion 8.9 no involucra hipotesis adicionales, de modoque cuando el coeficiente de ajuste R existe, este se encuentra siempre dentro

8.7. Aproximacion de De Vylder 233
del intervalo p0, 2pc λµqλµ2q. Este resultado fue usado en el Ejemplo 8.4.Observe ademas que cuando las reclamaciones estan acotadas superiormentepor una constante positiva M , podemos usar la cota inferior para R paraencontrar una cota superior para la probabilidad de ruina sin conocer elvalor exacto del coeficiente de ajuste, pues
ψpuq ¤ eRu
euM
lnpcλµq
elnpλµcquM
λµ
c
uM
.
Esta cota superior converge a 1 cuando M Ñ8 y por lo tanto se vuelve noinformativa. Cuando hacemos u Ñ 8, se corrobora que la probabilidad deruina se anula cuando el capital inicial es infinito.
8.7. Aproximacion de De Vylder
Consideremos nuevamente el modelo de riesgo de Cramer-Lundberg en dondelas reclamaciones tienen distribucion arbitraria. De Vylder propone aproxi-mar la probabilidad de ruina de este modelo mediante la probabilidad deruina de un modelo con reclamaciones exponenciales. Se define entonces elproceso
Ct u c t
Nt
j1
Yj , (8.14)
en donde c es una nueva tasa de ingreso por primas, tNt : t ¥ 0u es un proce-so de Poisson de parametro λ, y Yj son variables aleatorias con distribucionexppαq. Para lograr que los modelos tengan algun parecido se igualan lostres primeros momentos de los dos procesos y se encuentran los valores de losparametros c, λ y α en terminos de los parametros del riesgo original. Ası, laprobabilidad de ruina en el modelo original se aproxima por la probabilidadde ruina en el modelo con reclamaciones exponenciales.

234 8. Teorıa de la ruina: tiempo continuo
Proposicion 8.10 (Aproximacion de De Vylder) Suponga que lasreclamaciones en el modelo de riesgo de Cramer-Lundberg tienen tercermomento finito. Entonces la probabilidad de ruina en este modelo tienecomo aproximacion la formula
ψpuq λ
c αepαλcqu,
en donde
α 3µ2
µ3
, λ 9
2
µ32
µ23
λ, y c c λµ3
2
µ22
µ3
λ.
Demostracion. El metodo consiste en igualar los tres primeros momentosde las variables Ct y Ct. Primeramente veamos la igualacion de las esperan-zas. La condicion EpCtq EpCtq produce la ecuacion
u ct λµt u ct λ p1
αq t.
De donde se obtiene
c c λµλ
α. (8.15)
El siguiente paso es igualar las varianzas. De los resultados generales delprimer capıtulo, recordemos que la varianza de un riesgo S que sigue unmodelo colectivo Poissonpλq esta dada por VarpSq λµ2. Por lo tanto, dela condicion VarpCtq VarpCtq se obtiene
λµ2 2λ
α2. (8.16)
Hemos usado el hecho de que si X tiene distribucion exppαq, entoncesEpX2
q 2α2. Finalmente, recordemos que el tercer momento centralde un riesgo S que sigue un modelo colectivo Poissonpλq esta dado porEpS EpSqq3 λµ3. Por lo tanto, la tercera condicion EpCt EpCtqq
3
EpCt EpCtqq3 produce la ecuacion
λµ3 6λ
α3. (8.17)

8.8. Formula de Pollaczek-Khinchin 235
Hemos usado la formula EpX3q 6α3, valida cuando X tiene distribucion
exppαq. Despejando λ de (8.16) y (8.17) e igualando,
1
2λµ2α
2
1
6λµ3α
3.
Por lo tanto,
α 3µ2
µ3
. (8.18)
Sustituyendo en (8.16),
λ 9
2
µ32
µ23
λ. (8.19)
Sustituyendo (8.18) y (8.19) en (8.15),
c c λµ3
2
µ22
µ3
λ. (8.20)
De esta forma hemos encontrado los parametros c, λ y α en terminos de losparametros del riesgo original c, λ y los momentos de Y . ¥
No se espera que la aproximacion de De Vylder sea muy precisa pero es muyinteresante la idea de poder utilizar lo conocido para aproximar la soluciondesconocida de un problema general. El lector puede identificar el metodode momentos para la estimacion de parametros en la aproximacion de DeVylder. No es difıcil comprobar que la aproximacion de De Vylder es exactacuando las reclamaciones son exponenciales.
8.8. Formula de Pollaczek-Khinchin
La formula de Pollaczek-Khinchin es una expresion general que permiteescribir a la probabilidad de ruina en terminos de una serie infinita de con-voluciones. La demostracion que presentaremos hace uso de la transformadade Laplace de la cual se recuerda su definicion y algunas propiedades en elApendice. Para obtener la formula de Pollaczek-Khinchin se necesita cono-cer primero la transformada de Laplace de una distribucion geometrica com-puesta. Sea entonces X una variable aleatoria con distribucion geometrica

236 8. Teorıa de la ruina: tiempo continuo
compuesta, es decir, una variable aleatoria de la forma
X
N
j1
Uj , (8.21)
en donde N tiene distribucion geop1 pq, es decir, para n 0, 1, 2, . . .
P pN nq pn p1 pq,
y las variables U1, U2, . . . son independientes, no negativas, identicamentedistribuidas, y con funcion de distribucion Hpxq definida de la siguienteforma particular
Hpxq 1
µ
» x
0
F pyq dy,
en donde F pyq es una funcion de distribucion de una variable aleatoria nonegativa con media finita µ. Puede comprobarse que Hpxq es efectivamenteuna funcion de distribucion. Siguiendo la misma notacion que en el mode-lo de Cramer-Lundberg, F pyq representara la funcion de distribucion delmonto de una reclamacion.
Proposicion 8.11 Sea Gpxq la funcion de distribucion de la v.a. X condistribucion geometrica compuesta dada por (8.21) junto con la notacion ehipotesis arriba enunciados. Para valores de s suficientemente pequenos, latransformada de Laplace de Gpxq 1Gpxq es
»
8
0
esxGpxq dx p
s
1 p1 pqLF psq
µ pLF psq
.
Demostracion. Primeramente tenemos que
Gpxq
8
¸
n0
Hnpxqp1 pqpn.

8.8. Formula de Pollaczek-Khinchin 237
Entonces
Gpxq 1 p1 pq
8
¸
n0
pnHnpxq
p p1 pq
8
¸
n1
pnHnpxq.
La transformada de Laplace de esta funcion es
»
8
0
esxGpxq dx
p
s p1 pq
»
8
0
esxp
8
¸
n1
pnHnpxq q dx
p
s p1 pq
8
¸
n1
pn»
8
0
esxHnpxq dx
p
s p1 pq
8
¸
n1
pn sn1 LnHpsq
p
s
p1 pq
s
8
¸
n1
ppsLHpsqqn
p
s p1 pq
pLHpsq
1 psLHpsq.
En la ultima igualdad hemos supuesto que s es suficientemente pequenode tal forma que psLHpsq 1. A partir de la definicion de Hpxq puededemostrarse que
LHpsq 1
µsLF psq.
Por lo tanto,»
8
0
esxGpxq dx
p
s
p1 pq
s
pLF psq
µ pLF psq.
¥
Con la notacion e hipotesis utilizadas en el modelo de Cramer-Lundberg, te-nemos el siguiente resultado importante: la probabilidad de ruina esta dadapor la cola de la funcion de distribucion de la variable aleatoria geometricacompuesta dada por (8.21), es decir, ψpuq Gpxq.

238 8. Teorıa de la ruina: tiempo continuo
Teorema 8.2 (Formula de Pollaczek-Khinchin) Considere el modelode riesgo de Cramer-Lundberg en donde las reclamaciones tienen funcionde distribucion F pyq y media finita µ. Entonces la probabilidad de ruinaesta dada por
ψpuq p1 pq
8
¸
n1
pnHnpuq,
en donde p λµ
cy Hpuq
1
µ
» u
0
F pyq dy.
Demostracion. Sabemos que la probabilidad de ruina satisface la ecuacionintegral
ψpuq
λ
c
»
8
u
F pyq dy
» u
0
ψpu yqF pyq dy
λ
c
µ
» u
0
F pyq dy pψ F qpuq
.
Tomando la transformada de Laplace de esta funcion tenemos que
Lψpsq
λ
c
µ
s
1
sLF psq LψpsqLF psq
,
de donde se obtiene
Lψpsq
λcspµ LF psqq
1 λcLF psq
λcspµ pp p1 pqqLF psqq
1 λcLF psq
.
Definiendo p λµc, se puede escribir
Lψpsq
psrµ pp p1 pqqLF psqs
µ pLF psq
p
s
1 p1 pqLF psq
µ pLF psq
.

8.8. Formula de Pollaczek-Khinchin 239
De esta forma hemos encontrado que la transformada de Laplace de la pro-babilidad de ruina coincide con la transformada de Laplace de la funcionGpxq 1 Gpxq, en donde Gpxq es la funcion de distribucion geometricacompuesta dada por (8.21) con las caracterısticas descritas en la Proposi-cion 8.11. Por la unicidad de la transformada de Laplace tenemos que ambasfunciones deben ser iguales, es decir,
ψpuq Gpuq
p p1 pq
8
¸
n1
pnHnpuq
p p1 pq
8
¸
n1
pn p1Hnpuqq
p1 pq
8
¸
n1
pnHnpuq.
¥
En general no es inmediato calcular las convoluciones de la funcion de dis-tribucion Hpuq ni tampoco llevar a cabo la suma infinita que aparece enla formula de Pollaczek-Khinchin, pero sin duda es una formula bastanteatractiva desde el punto de vista matematico pues, como hemos visto, estaexpresion corresponde a la cola de la distribucion de la variable aleatoriageometrica compuesta dada por (8.21). Pueden llevarse a cabo simulacionesde esta variable aleatoria, calcular la magnitud de las colas y conocer de ma-nera aproximada la probabilidad de ruina cuando las reclamaciones tienendistribucion continua arbitraria. A continuacion reduciremos la formula dePollaczek-Khinchin a la solucion conocida para ψpuq en el caso cuando lasreclamaciones son exponenciales.
Ejemplo 8.9 (Reclamaciones exponenciales) Suponga que las recla-maciones tienen distribucion exponencial de parametro α. Entonces puedecomprobarse facilmente que Hpuq es nuevamente la funcion de distribucionexppαq. Por lo tanto, Hn
puq es la funcion de distribucion gamapn, αq ytiene la expresion
Hnpuq
8
¸
kn
eαu pαuqk
k!.

240 8. Teorıa de la ruina: tiempo continuo
Entonces
Hnpuq
n1
k0
eαu pαuqk
k!.
Por lo tanto,
8
¸
n1
pnHnpuq
8
¸
n1
n1
k0
pn eαu pαuqk
k!
8
¸
k0
8
¸
nk1
pn eαu pαuqk
k!
p
1 p
8
¸
k0
eαu pαpuqk
k!
p
1 peαp1pqu.
De donde se confirma nuevamente que la probabilidad de ruina en el mo-delo de Cramer-Lundberg cuando las reclamaciones son exponenciales deparametro α es
ψpuq p1 pq
8
¸
n1
pnHnpuq
p eαp1pqu
λ
αcepα
λcqu.
En la siguiente seccion veremos otro caso particular para la distribucion delas reclamaciones en el modelo de Cramer-Lundberg en donde la formula dePollaczek-Khinchin permite encontrar una forma de expresar la probabilidadde ruina.
8.9. Probabilidad de ruinacon reclamaciones tipo fase
Como ultimo resultado presentamos una expresion para la probabilidad deruina en el modelo de Cramer-Lundberg cuando las reclamaciones son con-tinuas tipo fase. Para un recordatorio sobre este tipo de distribuciones con-tinuas y algunas formulas elementales, vease la seccion sobre el tema en el

8.9. Probabilidad de ruina con reclamaciones tipo fase 241
capıtulo de procesos estocasticos. Para llegar a nuestro objetivo con mayorrapidez, utilizaremos los siguientes dos lemas tecnicos cuyas demostracionespueden encontrarse en el texto de Rolski et al. [32].
Lema 8.1 Sea F pyq la funcion de distribucion continua PHpπ,Bq con B nosingular, π0 0 y con media µ finita. Entonces la funcion de distribucion
Hpxq 1
µ
» x
0
F pyq dy
es nuevamente PHp 1
µπ B1, Bq.
Lema 8.2 Sean U1, U2, . . . v.a.s independientes con identica distribucioncontinua PHpπ,Bq, en donde B es no singular y π0 0. Sea N otra v.a. in-dependiente de las anteriores y con distribucion geoppq. Entonces la variablealeatoria
X
N
j1
Uj
correspondiente a un modelo geometrico compuesto tiene distribucion
PHppπ,B pbTπq.
Observe que el vector inicial pπ de la nueva distribucion tipo fase no esde probabilidad pues la suma de sus entradas es p. La entrada cero de estevector es 1p y corresponde a la probabilidad de que la variable geometricatome el valor cero, es decir, la probabilidad de que no haya sumandos.
Teorema 8.3 (Probabilidad de ruina con reclamaciones PH)Suponga que las reclamaciones en el modelo de Cramer-Lundberg tienendistribucion continua PHpπ,Bq con π0 0, en donde la matriz de subin-tensidades B es no singular y se cumple la condicion de ganancia netap λµ
c 1. Entonces para cualquier capital inicial u ¥ 0,
ψpuq pp1
µπ B1
q
exp upB pbT p1
µπ B1
eT . (8.22)

242 8. Teorıa de la ruina: tiempo continuo
Demostracion. La formula de Pollaczek-Khinchin establece que
ψpuq p1 pq
8
¸
n1
pnHnpuq
8
¸
n1
pn p1 pqP pX1 Xn ¡ uq,
en donde X1, X2, . . . son v.a.s independientes con identica funcion de dis-tribucion
Hpuq 1
µ
» u
0
F pyq dy,
con F pyq la funcion de distribucion PHpπ,Bq. La idea es identificar lossumandos como probabilidades condicionales de la siguiente forma:
ψpuq
8
¸
n1
P pN nqP p
N
k1
Xk ¡ u |N nq
P p
N
k1
Xk ¡ uq,
en donde N es una v.a. con distribucion geop1 pq, es decir,
P pN nq pnp1 pq, n 0, 1, . . .
Ası, puesto que conocemos la formula (6.5) de la pagina 153 para la colade una distribucion tipo fase y los Lemas 8.1 y 8.2 nos proporcionan losparametros de dicha distribucion, podemos deducir que Hpxq es
PHp1
µπ B1, Bq,
y por lo tanto la variable aleatoria geometrica es
PHppp1
µπ B1
q, B pbT p1
µπ B1
qq.
Substituyendo estos parametros en el formula (6.5) se obtiene el resultadoenunciado:
ψpuq pp1
µπ B1
q
exp upB pbT p1
µπ B1
eT .

8.10. Ejercicios 243
¥
Ejemplo 8.10 (Reclamaciones exponenciales) Consideremos nueva-mente el modelo de Cramer-Lundberg cuando las reclamaciones son expo-nenciales de parametro α. Esta vez consideraremos a la distribucion expo-nencial como una distribucion tipo fase continua. El correspondientes gene-rador infinitesimal de la cadena de Markov a tiempo continuo que produceel tiempo de espera hasta la absorcion exponencial de parametro α es
G
0 0α α
.
La matriz B α y el vector b α son unidimensionales, µ 1α yp λpαcq. Substituyendo estos terminos en la formula (8.22) se obtienenuevamente la expresion
ψpuq λ
αcepα
λcqu.
Comentarios y referencias
En este capıtulo final hemos estudiado algunos aspectos del modelo clasicode riesgo a tiempo continuo llamado modelo de Cramer-Lundberg. Hemosencontrado expresiones para algunas probabilidades de ruina en este mo-delo en terminos de ecuaciones diferenciales, integrales o ambas, y tambienen algunos casos en terminos de sumas infinitas. Muchos otros problemasmatematicos pueden estudiarse para este modelo o para sus generalizacio-nes. El lector interesado en profundizar en el tema puede consultar tex-tos mas avanzados como Asmussen [2] o Rolski et al. [32]. En el texto deSchmidli [35] puede encontrarse una exposicion sobre la interesante relacionentre algunos problemas de riesgo y la teorıa del control estocastico.
8.10. Ejercicios
Modelo de Cramer-Lundberg
170. Considere el proceso de Cramer-Lundberg tCt : t ¥ 0u con la no-tacion e hipotesis usuales. Demuestre que:

244 8. Teorıa de la ruina: tiempo continuo
a) EpCtq u pc λµqt.
b) VarpCtq λtµ2.
c) MCtprq exp r rpu ctq λtpMY prq 1q s.
Probabilidades de ruina
171. Suponga que las reclamaciones en el modelo de Cramer-Lundbergsiguen una distribucion exponencial de parametro α 1. Supongaademas que λ 12 y c 2. Observe que se cumple la condicionde ganancia neta c ¡ λµ. ¿Cual debe ser el capital inicial u paraque la probabilidad de ruina sea menor o igual a 0.01?
Coeficiente de ajuste
172. Demuestre que si las reclamaciones son variables aleatorias aco-tadas, entonces el coeficiente de ajuste existe.
173. Se ha demostrado que cuando las reclamaciones tienen distribucionexppαq el coeficiente de ajuste es R α λc. Usando la condi-cion de ganancia neta compruebe que este valor de R efectivamentecumple la desigualdad
0 R
2pc λµq
λµ2
.
Desigualdad de Lundberg
174. Demuestre que efectivamente el evento pτ ¤ tq converge monotona-mente al evento pτ 8q cuando t tiende a infinito monotonamente.Este resultado fue usado en la demostracion de la desigualdad deLundberg.
Aproximacion de De Vylder
175. Demuestre que la aproximacion de De Vylder coincide con la pro-babilidad de ruina en el caso cuando las reclamaciones tienen dis-tribucion exppαq.

Apendice: Formulario yresultados varios
Formula de De Pril en R
####################################
# F\’ormula de De Pril en R v1.1 #
####################################
I <- 5 # Montos de reclamaciones
J <- 3 # \’Indice m\’aximo para tasas de mortalidad
R <- 20 # Valor m\’aximo para r en g(r)
#
n <- array(1:15, dim=c(5,3))
n[1,1]<-1
n[2,1]<-3
n[3,1]<-5
n[4,1]<-2
n[5,1]<-2
n[1,2]<-3
n[2,2]<-5
n[3,2]<-3
n[4,2]<-2
n[5,2]<-3
n[1,3]<-1
n[2,3]<-4
n[3,3]<-4
n[4,3]<-6
n[5,3]<-4
#
q <- array(1:3, dim=c(3))
245

246 8. Teorıa de la ruina: tiempo continuo
q[1]<-0.03
q[2]<-0.04
q[3]<-0.05
#...............................
# Funci\’on h(i,k)
#...............................
h <- function(i,k)
aux <- 0
for (j in 1:J)
aux <- aux+n[i,j]*(q[j]/(1-q[j]))^k
aux <- i*((-1)^(k-1))*aux
return(aux)
#...............................
# C\’alculo de la densidad de S
#...............................
gc <- array(1:R, dim=c(R))
gc0 <- g(0)
#
g <- function(r)
if (r==0)
aux <- 1
for (i in 1:I)
for (j in 1:J)
aux <- aux*((1-q[j])^n[i,j])
return(aux)
else
aux <- 0
for (i in 1:min(r,I))
for (k in 1:floor(r/i))
if (r-i*k==0) aux <- aux + gc0*h(i,k)
else aux <- aux + gc[r-i*k]*h(i,k)
aux <- aux/r
gc[r] <- aux

8.10. Ejercicios 247
return(aux)
#...............................
# Asignaci\’on en el arreglo "gc" y graficaci\’on.
#...............................
for (i in 1:R)
gc[i] <- g(i)
# Nota: Se omite en la gr\’afica el valor de la densidad en cero "gc0".
barplot(gc,main="Funci?n de densidad de S",xlab="r", ylab="g(r)")
#################################################################
# Fin de c\’odigo
#################################################################
Formula de Panjer en R(Caso Poisson)
####################################
# F\’ormula de Panjer en R v1.0 #
# [Caso Poisson] #
####################################
#
R <- 20 # Valor m\’aximo para r en g(r)
#
#...............................
# c\’alculo de p_k=P(N=k) (Caso Poisson)
#...............................
a <- 0
b <- 3.5 #lambda
p0 <- 2.7172^-b
p <- array(1:R, dim=c(R))
p[1] <- (a+b)*p0
for (k in 2:R)
p[k] <- (a+b/k)*p[k-1]
#...............................
# c\’alculo de f_r=P(Y=r), r>=1
#...............................
#

248 8. Teorıa de la ruina: tiempo continuo
f <- array(1:R, dim=c(R))
f[1] <- 0.1
f[2] <- 0.1
f[3] <- 0.2
f[4] <- 0.3
f[5] <- 0.3
for (i in 5:R) f[i] <- 0
#................................
# C\’alculo de la densidad de S
#................................
g0 <- p0
g <- array(1:R, dim=c(R))
g[1] <- (a+b)*f[1]*g0
for (r in 2: R)
aux <- 0
for (i in 1:r-1)
aux <- aux + (a+b*i/r)*f[i]*g[r-i]
aux <- aux + (a+b)*f[r]*g0
g[r] <- aux
#...............................
# Graficaci\’on
#...............................
# Nota: Se omite en la gr\’afica el valor de la densidad en cero "g0".
barplot(g,main="Funcin de densidad de S",xlab="r", ylab="g(r)")
#
#################################################################
# Fin de c\’odigo
#################################################################

8.10. Ejercicios 249
Alfabeto griego
A α alpha I ι iota P ρ, rhoB β beta K κ kappa Σ σ, ς sigmaΓ γ gamma Λ λ lambda T τ tau∆ δ delta M µ mu Υ υ upsilonE ǫ, ε epsilon N ν nu Φ φ, ϕ phiZ ζ zeta Ξ ξ xi X χ chiH η eta O o omikron Ψ ψ psiΘ θ, ϑ theta Π π pi Ω ω omega
Funcion indicadoraLa funcion indicadora de un conjunto A Ω es la funcion 1A : Ω Ñ t0, 1udefinida por
1Apωq
"
1 si ω P A,
0 si ω R A.
De este modo la funcion 1A toma el valor uno dentro del conjunto A y cerofuera de el, y cumple las siguientes propiedades:
a) 1AYB maxt1A, 1Bu 1A 1B 1A 1B.
b) 1AXB mınt1A, 1Bu 1A 1B.
c) 1Ac 1 1A.
d) 1AB 1A 1A 1B.
e) 1AB |1A 1B| 1A 1B 2 1A 1B p1A 1Bq2.
f) A B ñ 1A ¤ 1B.
Funcion generadora de probabilidadLa funcion generadora de probabilidad de una variable aleatoria X es lafuncion dada por
Gptq EptXq ¸
x
tx P pX xq,

250 8. Teorıa de la ruina: tiempo continuo
definida para valores reales de t tal que la suma indicada sea absolutamenteconvergente. Esta funcion se utiliza principalmente para variables aleatoriasdiscretas y sin perdida de generalidad se postula que la variable toma losvalores 0, 1, . . . y por lo tanto esta funcion existe por lo menos para valores det en el conjunto r1, 1s. Para hacer enfasis en la variable aleatoria particularX para la que se utiliza se escribe a veces como GXptq. Esta funcion cumplelas siguientes propiedades:
a) La funcion generadora de probabilidad adquiere su nombre a partirdel siguiente resultado: para cada entero n ¥ 0,
lımtÑ0
dn
dtnGXptq P pX nq.
b) La funcion generadora de probabilidad determina de manera unica ala distribucion de probabilidad de la variable aleatoria, es decir, si X yY tienen la misma distribucion de probabilidad, entonces claramentetienen la misma funcion generadora de probabilidad. Inversamente, siX y Y son tales que sus funciones generadoras de probabilidad GXptq
y Gyptq coinciden en un intervalo no trivial alrededor del cero, entoncesX y Y tienen la misma distribucion de probabilidad.
c) Si el n-esimo momento factorial de X existe, entonces
lımtÕ1
dn
dtnGXptq ErXpX 1q pX n 1qs.
d) Si X y Y son independientes, entonces
GXY ptq GXptqGY ptq.
Para un estudio mas detallado de la funcion generadora de probabilidad, ellector puede consultar el libro de Gut [17].
Funcion gamaPara valores de α donde la integral es convergente se define
Γpαq
»
8
0
xα1ex dx,
y se cumplen las siguientes propiedades:

8.10. Ejercicios 251
a) Γpα 1q αΓpαq.
b) Γpα 1q α! cuando α es entero positivo.
c) Γp2q Γp1q 1.
d) Γp12q ?
π.
Pueden consultars algunas otras propiedades de la funcion gama en [36].
Funciones de utilidadUna funcion de utilidad es una funcion vpxq que representa el valor o uti-lidad que un individuo o institucion asocia a cada cantidad de un bien.Matematicamente a una funcion de utilidad se le define a traves de lassiguientes dos propiedades:
a) Es estrictamente creciente.
b) Es concava.
Suponiendo diferenciabilidad, estas propiedades se escriben como v1pxq ¡ 0y v2pxq ¤ 0, respectivamente. La primera propiedad representa el hecho evi-dente de que una cantidad mayor de dinero siempre tiene un valor o utilidadmayor. Para interpretar la segunda propiedad consideremos la situacion enla que tanto una persona pobre como una persona rica incrementan ambossu capital por una misma cantidad. Entonces este incremento representapara una persona con poco dinero un gran incremento en su utilidad, mien-tras que el mismo incremento representa un menor incremento en la utilidadpara una persona con mayor cantidad de dinero. En otras palabras, cuan-do hay un incremento de capital fijo, el valor o utilidad crece mas rapidocuando uno tiene poco dinero y mas lento cuando uno tiene mucho dinero.Dos funciones de utilidad upxq y vpxq son equivalentes si existen constantesa y b, con a ¡ 0, tales que vpxq aupxq b. La razon que subyace en estadefinicion de equivalencia radica en el hecho de que si un persona con capitalx, funcion de utilidad upxq, y usando el principio de la utilidad esperada,prefiere la inversion I1 sobre la inversion I2 si
Erupx I1qs ¡ Erupx I2qs,

252 8. Teorıa de la ruina: tiempo continuo
y tal decision no cambia si en lugar de usar la funcion de utilidad upxq
utiliza ahora vpxq aupxq b, pues la desigualdad anterior es equivalente a
Eraupx I1q bs ¡ Eraupx I2q bs.
Del conjunto de funciones de utilidad equivalentes a una funcion de utilidaddada upxq, uno puede escoger aquella funcion de utilidad vpxq tal que vp0q 0 y vp1q 1. Tal funcion de utilidad vpxq esta dada por
vpxq upxq up0q
up1q up0q,
suponiendo que los valores x 0 y x 1 pertenecen al dominio de definicionde la funcion upxq. Es por ello que a una funcion de utilidad upxq se le puedepedir la condicion up0q 0, sin perder generalidad ni provocar cambios enla toma de decisiones bajo el criterio de utilidad esperada. El lector puedeencontrar exposiciones breves sobre la teorıa de utilidad y los seguros en elprimer capıtulo de los textos [7] y [22].
Coeficiente de asimetrıa de FisherPara una variable aleatoria X con tercer momento finito se define el coefi-ciente de asimetrıa de Fisher α3 como el numero
α3
ErpX EpXqq3s
rVarpXqs32.
Esta cantidad es una medida de la asimetrıa de la distribucion alrededorde su media. Cuando α3 0 la distribucion es completamente simetricaalrededor de su media, como es el caso, por ejemplo, de la distribucionnormal. Cuando α3 ¡ 0 se dice que la distribucion es asimetrica positivao que tiene mayor sesgo hacia la derecha (es decir, la cola a la derechade la media es mas larga que la de la izquierda, o bien, que hay valoresmas separados de la media a la derecha). Cuando α3 0, se dice que ladistribucion es asimetrica negativa o que tiene mayor sesgo a la izquierda(es decir, la cola a la izquierda de la media es mas larga que la de la derecha,o bien, que hay valores mas separados de la media a la izquierda).

8.10. Ejercicios 253
α3 0
µ
α3 ¡ 0
µ
α3 0
µ
Desigualdad de JensenSea u una funcion convexa y sea X una variable aleatoria tal que tanto X
como upXq tienen esperanza finita. Entonces
upEpXqq ¤ EpupXqq.
En el caso cuando u es concava, el resultado es
upEpXqq ¥ EpupXqq.
Una demostracion de la desigualdad de Jensen puede encontrarse por ejem-plo en [17].
Desigualdad de MarkovSea X una variable aleaotoria positiva con esperanza finita. Entonces paracualquier ǫ ¡ 0,
P pX ¥ ǫq ¤EpXq
ǫ.
La demostracion de este resultado es un buen ejercicio para el lector.
Esperanza condicionalSean pΩ,F , P q un espacio de probabilidad, X una variable aleatoria conesperanza finita y G una sub-σ-algebra de F . La esperanza condicional deX dado G es una variable aleatoria denotada por EpX |G q que cumple lassiguientes tres propiedades:
1. Es G -medible.
2. Tiene esperanza finita.
3. Para cualquier evento G en G , ErEpX |G q 1G s ErX 1G s.

254 8. Teorıa de la ruina: tiempo continuo
Puede demostrarse que esta variable aleatoria existe y es unica casi se-guramente, esto significa que si existe otra variable aleatoria con las trespropiedades anteriores, entonces con probabilidad uno coincide con EpX |G q.Cuando G σpY q para alguna variable aleatoria Y , se escribe EpX |Y q enlugar de EpX |σpY qq. En particular, el termino P pA |Y q significa Ep1A |Y q.Se enuncian a continuacion algunas propiedades de esta esperanza.
a) EpX | tH,Ωu q EpXq.
b) Ep1A | tH,Ωu q P pAq.
c) Ep1A | tH, B,Bc,Ωu q P pA|Bq1B P pA|Bcq1Bc .
d) EpEpX |G qq EpXq. En particular, EpP pA |Y qq Ep1Aq P pAq.
e) Si X es G -medible, entonces EpX |G q X. En particular, si c es unaconstante, entonces Epc |G q c.
f) EpaX Y |G q aEpX |G q EpY |G q.
g) Si X ¥ 0, entonces EpX |G q ¥ 0.
h) Teorema de convergencia monotona.Si 0 ¤ Xn Õ X, entonces EpXn |G q Õ EpX |G q c.s.
i) Teorema de convergencia dominada.Si |Xn| ¤ Y , E|Y | 8 y Xn Ñ X c.s., entonces EpXn |G q Ñ
EpX |G q c.s.
j) Desigualdad de Jensen.Si ϕ es convexa, entonces ϕpEpX |G qq ¤ EpϕpXq |G q.
k) Si H es una sub σ-algebra de G , entonces EpEpX |G q |H q EpX |H q.
l) Si Z es G -medible y acotada, entonces EpZ X |G q Z EpX |G q.
m) Si X es independiente de G , entonces EpX |G q EpXq.
Un estudio mas detallado de la esperanza condicional puede ser encontradoen libros dedicados a probabilidad como [21] o [40].

8.10. Ejercicios 255
Integral de Riemann-StieltjesLa integral de Riemann-Stieltjes generaliza a la integral usual de Riemann.Se trata de la integral de una funcion hpxq respecto de otra funcion F pxq.Su definicion es analoga al caso de la integral de Riemann: si a x0
x1 xn b es una particion del intervalo ra, bs, entonces definimosde manera informal
» b
a
hpxq dF pxq : lım∆xÑ0
n
i1
hpxiqpF pxiq F pxi1qq,
en donde ∆x es el maximo de las distancias xixi1, y las funciones hpxq yF pxq deben cumplir ciertas condiciones para que la integral tenga sentido yeste bien definida. En particular, a la funcion integradora F pxq se le pide quesea continua por la derecha, monotona no decreciente y tal que F pbqF paq M , para algun numero M ¡ 0. Observe que F pxq debe cumplir propiedadessemejantes a las de una funcion de distribucion, justamente usaremos alas funciones de distribucion como funciones integradoras. En particular,cuando F pxq x sobre el intervalo ra, bs se tiene que
» b
a
hpxq dF pxq
» b
a
hpxq dx,
suponiendo la existencia de tal integral. Igualmente, bajo la hipotesis deexistencia de todas las integrales que aparecen a continuacion, la integralde Riemann-Stieltjes cumple las siguientes propiedades:
a) Es lineal en el integrando, es decir,» b
a
pαh1pxq h2pxqq dF pxq α
» b
a
h1pxq dF pxq
» b
a
h2pxq dF pxq.
b) Es tambien lineal en el integrador, es decir,» b
a
hpxq dpαF1pxq F2pxqq α
» b
a
hpxq dF1pxq
» b
a
hpxq dF2pxq.
c) Cuando hpxq tiene primera derivada continua se cumple la siguienteformula de integracion por partes:
» b
a
hpxq dF pxq hpbqF pbq hpaqF paq
» b
a
F pxqh1pxq dx.

256 8. Teorıa de la ruina: tiempo continuo
d) De especial interes en la teorıa de la probabilidad es el caso cuandoF pxq es diferenciable. Bajo tal hipotesis se tiene la igualdad
» b
a
hpxq dF pxq
» b
a
hpxqF 1
pxq dx.
En particular, tomando hpxq x y si X es una v.a. absolutamentecontinua con esperanza finita, con funcion de distribucion F pxq y fun-cion de densidad fpxq, entonces
EpXq
»
8
8
x dF pxq
»
8
8
xfpxq dx.
e) Otro caso interesante para la teorıa de la probabilidad ocurre cuandohpxq es continua y F pxq es constante excepto en los puntos x0, x1, . . .,en donde la funcion tiene saltos positivos de tamano ppx0q, ppx1q, . . .
respectivamente. En este caso y suponiendo convergencia,
» b
a
hpxq dF pxq
8
¸
i0
hpxiq ppxiq.
Esto significa que integrar respecto de la funcion de distribucion de unavariable aleatoria discreta se reduce a efectuar una suma. Nuevamentetomando hpxq x y si X es una v.a. discreta con esperanza finita ycon funcion de distribucion como se menciono antes, entonces
EpXq
»
8
8
x dF pxq
8
¸
i0
xippxiq.
En el caso cuando X es una v.a. mixta con esperanza finita, en elcalculo de la esperanza se separa la parte continua de la parte discretade la siguiente forma
EpXq
»
8
8
x dF pxq
»
8
8
xfpxq dx
8
¸
i0
xi ppxiq.
Un tratamiento mas riguroso y completo de la integral de Riemann-Stieltjespuede encontrarse en el texto de probabilidad de Harris [18], o en libros deanalisis matematico como el de Apostol [1].

8.10. Ejercicios 257
Variables aleatorias mixtasUna variable aleatoria mixta X es aquella que no es ni continua ni es dis-creta. Su funcion de distribucion puede escribirse de la siguiente forma
F pxq
» x
8
fpuq du¸
xi¤x
ppxiq,
en donde fpuq es una funcion no negativa y ppxiq P pX xiq ¡ 0 paraciertos valores x0, x1, . . . Si g es una funcion tal que gpXq es una variablealeatoria integrable, entonces su esperanza se calcula de la siguiente forma
EpgpXqq
»
8
8
gpxq dF pxq
»
8
8
gpxqfpxq dx
8
¸
i0
gpxiqppxiq.
En el libro de Gut [17] puede encontrarse un tratamiento completo sobrevariables aleatorias mixtas.
Varianza condicionalSea X una variable aleatoria con segundo momento finito, y sea G una sub-σ-algebra de F . La varianza condicional de X dado G se define como lavariable aleatoria dada por
VarpX |G q Er pX EpX|G qq2 |G s.
Nuevamente, cuando la sub-σ-algebra G es σpY q para alguna variable aleato-ria Y , entonces VarpX |G q se escribe VarpX |Y q, y puede tomarse comodefinicion la igualdad
VarpX |Y q Er pX EpX |Y qq2 |Y s.
Se enuncian a continuacion algunas propiedades de esta variable aleatoria.
a) VarpX | tH,Ωuq VarpXq.
b) Varp1A | tH,Ωuq P pAqp1 P pAqq.
c) VarpX |G q EpX2|G q E2
pX |G q.
d) VarpXq ErVarpX |G qs VarrEpX |G qs.

258 8. Teorıa de la ruina: tiempo continuo
Siendo la varianza condicional parte del concepto general de esperanzacondicional, en los textos de Karr [21] y Williams [40] se puede encontrarmayor informacion sobre estas variables aleatorias.
Ley de los grandes numerosSea X1, X2, . . . una sucesion de variables aleatorias independientes e identi-camente distribuidas con media µ. Entonces
1
n
n
i1
Xi Ñ µ.
Cuando la convergencia es en probabilidad este resultado se conoce como laley debil. Y cuando la convergencia es casi segura se llama ley fuerte. Lasdemostraciones de estos resultados pueden encontrarse en [17].
Teorema central del lımiteSea X1, X2, . . . una sucesion de variables aleatorias independientes e identi-camente distribuidas con media µ y varianza σ2. Entonces
p
1
n
°ni1
Xiq µa
σ2n
dÑ Np0, 1q.
La demostracion de este importante resultado ası como de los siguientes dosteoremas de convergencia pueden encontrarse en [17].
Teorema de convergencia dominadaSea X1 ¤ X2 ¤ una sucesion de variables aleatorias para la cual existeotra variable aleatoria Y con esperanza finita y tal que |Xn| ¤ Y , paran ¥ 1. Si Xn converge casi seguramente a una variable X, entonces tantoX como Xn tienen esperanza finita y
lımnÑ8
EpXnq EpXq.
Teorema de convergencia monotonaSea 0 ¤ X1 ¤ X2 ¤ una sucesion monotona de variables aleatoriasconvergente casi seguramente a una variable X. Entonces
lımnÑ8
EpXnq EpXq.

8.10. Ejercicios 259
Formulas recursivas para calcular convolucionesSean X1, X2, . . . variables aleatorias independientes e identicamente dis-tribuidas. Nos interesa encontrar la distribucion de Sn X1 Xn.Cuando las variables tXiu tienen funcion de distribucion F , a la funcion dedistribucion de Sn se le llama la n-esima convolucion de F , y se le denotapor F n, es decir, F n
pxq P pSn ¤ xq. Cuando las variables tXiu tienenfuncion de probabilidad o de densidad f , a la funcion de probabilidad o dedensidad de Sn se le llama la n-esima convolucion de f , y se le denota porfn, es decir, en el caso discreto, fnpxq P pSn xq.
1. Cuando las variables tXiu son discretas con valores en el conjuntot0, 1, 2, . . .u, se cumplen las siguientes formulas recursivas.
a) P pSn xq
x
j0
P pSn1 x jqP pXn jq.
b) P pSn ¤ xq
x
j0
P pSn1 ¤ x jqP pXn jq.
2. Cuando las variables tXiu son continuas con soporte en el intervalop0,8q, con funcion de distribucion F , y con funcion de densidad f , secumplen las siguientes formulas recursivas.
a) fnpxq
» x
0
fpn1qpx yq fpyq dy.
b) F npxq
» x
0
F pn1qpx yq fpyq dy.
Transformada de LaplacePara una funcion ψpuq : r0,8q Ñ R, la transformada de Laplace es
s ÞÑ Lψpsq
»
8
0
esuψpuq du,
para valores reales de s donde tal integral exista. Hemos usado la notacionpara la probabilidad de ruina ψpuq como funcion objeto en la transformadade Lapace pues a este tipo de funciones se le aplicara con mayor frecuenciaesta transformacion. Cuando sea conveniente denotaremos la transformadade Laplace tambien como Lrψpuqspsq. Revisaremos a continuacion algunaspropiedades que cumple esta transformacion.

260 8. Teorıa de la ruina: tiempo continuo
a) La transformada de una constante c es Lcpsq c
s.
b) Linealidad: si α1 y α2 son constantes, entonces
Lα1ψ1α2ψ2psq α1 Lψ1
psq α2 Lψ2psq.
c) La transformada de Laplace de la derivada de una funcion es
Lψ1psq sLψ ψp0q.
d) La transformada de Laplace de la integral Hpuq
» u
0
ψpxq dx es
LHpsq 1
sLψpsq.
e) La transformada de Laplace de la convolucion de dos funciones es
Lψ1ψ2psq Lψ1
psqLψ2psq,
en donde pψ1 ψ2qpuq
» u
0
ψ1pu xqψ2pxqdx. Observe sin embargo
la siguiente situacion particular: si Gpxq es la convolucion de dos fun-ciones de distribucion continuas F1pxq y F2pxq de variables aleatoriasno negativas, es decir,
Gpxq
» x
0
F1px yqdF2pyq
» x
0
F1px yqf2pyqdy pF1 f2qpxq,
en donde f2pyq es la funcion de densidad de F2pyq, entonces
LGpsq LF1psqLf2psq sLF1
psqLF2psq.
f) Existencia: se dice que una funcion ψpuq definida para u ¥ 0 es deorden exponencial cuando u tiende a infinito si existe una constanteu0 tal que para todo u ¥ u0,
|ψpuq| ¤ mecu,
en donde m y c son constantes. Puede demostrarse que cuando estacondicion se cumple la transformada de Laplace Lψpsq existe paras ¥ c.

8.10. Ejercicios 261
g) Unicidad: sean ψ1puq y ψ2puq dos funciones continuas definidas parau ¥ 0, ambas de orden exponencial, si existe una constante s0 tal queLψ1
psq Lψ2psq para todo s ¡ s0, entonces ψ1puq ψ2puq para todo
u ¥ 0.
Un tratamiento mas completo sobre la transformada de Laplace y sus apli-caciones puede encontrarse en [33].
Metodo de Newton-RaphsonSea gpxq una funcion diferenciable que tiene una raız cerca de x x0. Veasela Figura 6. El metodo de Newton-Raphson permite conocer el valor de estaraız mediante aproximaciones sucesivas.
b
gpxq
xb
x0
b
x1
Figura 6
La primera aproximacion de la raız es el valor inicial x0. La ecuacion de larecta tangente que pasa por el punto px0, gpx0qq es
y gpx0q g1px0qpx x0q.
Esta lınea recta cruza el eje horizontal cuando el valor de x es igual a
x1 x0 gpx0q
g1px0q.
Se toma a x1 como nueva raız aproximada y se repite el procedimiento.De este modo se encuentra una sucesion de valores x0, x1, x2, . . ., que bajociertas condiciones converge a la raız de la funcion gpxq. La formula generales entonces
xn1 xn gpxnq
g1pxnq.

262 8. Teorıa de la ruina: tiempo continuo
En el presente texto se ha mencionado este mecanismo para encontrar demanera aproximada el coeficiente de ajuste en los modelos de riesgo estudia-dos. El lector puede consultar, por ejemplo, el texto de Burden y Faires [10]para profundizar sobre el metodo de Newton-Raphson.

8.10. Ejercicios 263
Distribuciones de probabilidad
En esta seccion se presentan en orden alfabetico algunas distribuciones deprobabilidad utilizadas en el texto. La funcion generadora de probabilidadse denota por Gptq, y la funcion generadora de la momentos por Mptq.
fpxq
x
pp 0.7q
0 1
Distribucion Bernoulli
X Berppq con p P p0, 1q.fpxq pxp1 pq1x para x 0, 1.EpXq p.VarpXq pp1 pq.Gptq 1 p pt.Mptq p1 pq pet.
fpxq
x
Distribucion beta
X betapa, bq con a ¡ 0, b ¡ 0.fpxq xa1
p1 xqb1Bpa, bq para x P
p0, 1q.en donde Bpa, bq ΓpaqΓpbqΓpa bq,con Γpaq
³
8
0ta1et dt.
EpXq apa bq.VarpXq abrpa b 1qpa bq2s.Cuando a b 1 se obtiene la dist. unifp0, 1q.

264 8. Teorıa de la ruina: tiempo continuo
fpxq
x
pn 8, p 0.3q
Distribucion binomial
X binpn, pq con n P t1, 2, . . .u y p P
p0, 1q.
fpxq
n
k
pxp1pqnx para x 0, 1, . . . , n.
EpXq np.VarpXq npp1 pq.Gptq p1 p ptqn.Mptq rp1 pq petsn.
fpxq
x
pk 3, p 12q
Distribucion binomial negativa
X bin negpk, pq con p P p0, 1q y k P
t1, 2, . . .u.
fpxq
k x 1
x
pkp1 pqx para x
0, 1, . . .EpXq kp1 pqp.VarpXq kp1 pqp2.Gptq rpp1 p1 pqtqsk.Mptq rpp1p1pqetqsk para t lnp1pq.Cuando r 1 se obtiene la distribuciongeoppq.
a
fpxq
x
Distribucion Cauchy
X Cauchypa, bq con a P R y b ¡ 0.
fpxq 1
bπr1 ppx aqbq2s, para x P R.
F pxq 12 p1πq arctanppx aqbq.La esperanza y varianza no existen.La funcion generadora de momentos no exis-te.Cuando a 0 y b 1 se obtiene la dis-tribucion Cauchy estandar, Cauchyp0, 1q.

8.10. Ejercicios 265
λ
fpxq
x
Distribucion exponencial
X exppλq con λ ¡ 0.fpxq λeλx para x ¡ 0.F pxq 1 eλx para x ¡ 0.EpXq 1λ.VarpXq 1λ2.Mptq λpλ tq para t λ.
fpxq
x
Distribucion gama
X gamapγ, αq con γ ¡ 0 y α ¡ 0.
fpxq pαxqγ1
Γpγqαeαx para x ¡ 0.
F pxq 1 eαx°γ1
j0pαxqjj! para x ¡ 0
y γ entero.EpXq γα.VarpXq γα2.EpXn
q Γpγ nqpΓpγqαnq.
Mptq rαpα tqsγ para t α.Cuando γ 1 se obtiene la distribucionexppαq. Cuando γ es entero se conoce tam-bien con el nombre de distribucion Erlang.
fpxq
x
pp 15q
Distribucion geometrica
X geoppq con p P p0, 1q.fpxq pp1 pqx para x 0, 1, . . .EpXq p1 pqp.VarpXq p1 pqp2.Gptq pp1 p1 pqtq.Mptq pp1p1pqetq para t lnp1pq.

266 8. Teorıa de la ruina: tiempo continuo
fpxq
x
Distribucion ji-cuadrada
X χ2pnq con n ¡ 0.
fpxq p12qn2
Γpn2qxn21ex2 para x ¡ 0.
EpXq n.VarpXq 2n.Mptq p1 2tqn2 para t 12.
fpxq
x
Distribucion log normal
X lognormalpµ, σ2q con µ P R y σ2
¡
0.
fpxq 1
x?
2πσ2exprplnxµq22σ2
s, x ¡
0.F pxq Φpplnx µqσq.EpXq exppµ σ2
2q.EpXn
q exppnµ n2σ22q.
VarpXq expp2µ 2σ2q expp2µ σ2
q.SiX Npµ, σ2
q, entonces eX lognormalpµ, σ2q.
fpxq
xµ
Distribucion normal
X Npµ, σ2q con µ P R y σ2
¡ 0.
fpxq 1
?
2πσ2epxµq22σ2
.
EpXq µ.VarpXq σ2.Mptq exp pµt σ2t22q.φptq exp piµt σ2t22q.Cuando µ 0 y σ2
1 se obtiene la dis-tribucion normal estandar, Np0, 1q.

8.10. Ejercicios 267
ab
fpxq
x
Distribucion Pareto
X Paretopa, bq con a, b ¡ 0.
fpxq aba
pb xqa1para x ¡ 0.
F pxq 1 rbpb xqsa para x ¡ 0.EpXq bpa 1q para a ¡ 1.VarpXq ab2rpa 1q2pa 2qs, a ¡ 2.
fpxq
x
pλ 4q
Distribucion Poisson
X Poissonpλq con λ ¡ 0.
fpxq eλλx
x!para x 0, 1, . . .
EpXq λ.VarpXq λ.Gptq eλp1tq.Mptq exprλpet 1qs.
fpxq
x
Distribucion t
X tpnq con n ¡ 0.
fpxq Γpn 12q?
nπ Γpn2qp1
x2
nq
n12.
EpXq 0.VarpXq npn 2q para n ¡ 2.Mptq no existe para t 0.φptq expp|t|q.

268 8. Teorıa de la ruina: tiempo continuo
fpxq
x
Distribucion Weibull
X Weibullpr, αq con r, α ¡ 0.fpxq epαxq
r
rαrxr1 para x ¡ 0.F pxq 1 epαxq
rpara x ¡ 0.
EpXq Γp1 1rqα.VarpXq rΓp1 2rq Γ2
p1 1rqsα2.

8.10. Ejercicios 269
Tabla de la distribucion normal estandar
x
Φpxq 1
?
2π
» x
8
et22dt
x 0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0.0 0.5000 0.5040 0.5080 0.5120 0.5160 0.5199 0.5239 0.5279 0.5319 0.5359
0.1 0.5398 0.5438 0.5478 0.5517 0.5557 0.5596 0.5636 0.5675 0.5714 0.5753
0.2 0.5793 0.5832 0.5871 0.5910 0.5948 0.5987 0.6026 0.6064 0.6103 0.6141
0.3 0.6179 0.6217 0.6255 0.6293 0.6331 0.6368 0.6406 0.6443 0.6480 0.6517
0.4 0.6554 0.6591 0.6628 0.6664 0.6700 0.6736 0.6772 0.6808 0.6844 0.6879
0.5 0.6915 0.6950 0.6985 0.7019 0.7054 0.7088 0.7123 0.7157 0.7190 0.7224
0.6 0.7257 0.7291 0.7324 0.7357 0.7389 0.7422 0.7454 0.7486 0.7517 0.7549
0.7 0.7580 0.7611 0.7642 0.7673 0.7704 0.7734 0.7764 0.7794 0.7823 0.7852
0.8 0.7881 0.7910 0.7939 0.7967 0.7995 0.8023 0.8051 0.8078 0.8106 0.8133
0.9 0.8159 0.8186 0.8212 0.8238 0.8264 0.8289 0.8315 0.8340 0.8365 0.8399
1.0 0.8413 0.8438 0.8461 0.8485 0.8508 0.8531 0.8554 0.8577 0.8599 0.8621
1.1 0.8643 0.8665 0.8686 0.8708 0.8729 0.8749 0.8770 0.8790 0.8810 0.8830
1.2 0.8849 0.8869 0.8888 0.8907 0.8925 0.8944 0.8962 0.8980 0.8997 0.9015
1.3 0.9032 0.9049 0.9066 0.9082 0.9099 0.9115 0.9131 0.9147 0.9162 0.9177
1.4 0.9192 0.9207 0.9222 0.9236 0.9251 0.9265 0.9279 0.9292 0.9306 0.9319
1.5 0.9332 0.9345 0.9357 0.9370 0.9382 0.9394 0.9406 0.9418 0.9429 0.9441
1.6 0.9452 0.9463 0.9474 0.9484 0.9495 0.9505 0.9515 0.9525 0.9535 0.9545
1.7 0.9554 0.9564 0.9573 0.9582 0.9591 0.9599 0.9608 0.9616 0.9625 0.9633
1.8 0.9641 0.9649 0.9656 0.9664 0.9671 0.9678 0.9686 0.9693 0.9699 0.9706
1.9 0.9713 0.9719 0.9726 0.9732 0.9738 0.9744 0.9750 0.9756 0.9761 0.9767
2.0 0.9772 0.9778 0.9783 0.9788 0.9793 0.9798 0.9803 0.9808 0.9812 0.9817
2.1 0.9821 0.9826 0.9830 0.9834 0.9838 0.9842 0.9846 0.9850 0.9854 0.9857
2.2 0.9861 0.9864 0.9868 0.9871 0.9875 0.9878 0.9881 0.9884 0.9887 0.9890
2.3 0.9893 0.9896 0.9898 0.9901 0.9904 0.9906 0.9909 0.9911 0.9913 0.9916
2.4 0.9918 0.9920 0.9922 0.9925 0.9927 0.9929 0.9931 0.9932 0.9934 0.9936
2.5 0.9938 0.9940 0.9941 0.9943 0.9945 0.9946 0.9948 0.9949 0.9951 0.9952
2.6 0.9953 0.9955 0.9956 0.9957 0.9959 0.9960 0.9961 0.9962 0.9963 0.9964
2.7 0.9965 0.9966 0.9967 0.9968 0.9969 0.9970 0.9971 0.9972 0.9973 0.9974
2.8 0.9974 0.9975 0.9976 0.9977 0.9977 0.9978 0.9979 0.9979 0.9980 0.9981
2.9 0.9981 0.9982 0.9982 0.9983 0.9984 0.9984 0.9985 0.9985 0.9986 0.9986
3.0 0.9987 0.9987 0.9987 0.9988 0.9988 0.9989 0.9989 0.9989 0.9990 0.9990
3.1 0.9990 0.9991 0.9991 0.9991 0.9992 0.9992 0.9992 0.9992 0.9993 0.9993
3.2 0.9993 0.9993 0.9994 0.9994 0.9994 0.9994 0.9994 0.9995 0.9995 0.9995
3.3 0.9995 0.9995 0.9995 0.9996 0.9996 0.9996 0.9996 0.9996 0.9996 0.9997
3.4 0.9997 0.9997 0.9997 0.9997 0.9997 0.9997 0.9997 0.9997 0.9997 0.9998


Bibliografıa
[1] Apostol T. M. (1974) Mathematical analysis. Addison–Wesley.
[2] Asmussen S. (2000) Ruin probabilities. World Scientific.
[3] Basu A. K. (2003) Introduction to stochastic processes. Alpha ScienceInternational Ltd.
[4] Beard R. E., Pentikainen T., Pesonen E. (1984) Risk theory. Terceraedicion. Chapman and Hall.
[5] Bladt M. (2005) A review of phase-type distributions and their use inrisk theory. ASTIN Bulletin, Vol. 35, Num. 1, pp. 145–161.
[6] Boland P. (2007) Statistical and probabilistic methods in actuarial sci-ence. Chapman & Hall / CRC.
[7] Bowers N. L. Jr., Gerber H. U., Hickman J. C., Jones D. A., NesbittC. J. (1997) Actuarial mathematics. The Society of Actuaries.
[8] Buhlmann H. (1970) Mathematical methods in risk theory. Springer–Verlag.
[9] Buhlmann H., Gisler A. (2005) A course in credibility theory and itsapplications. Springer.
[10] Burden J. D., Faires J. D. (2010) Numerical analysis. Brooks Cole.
[11] Daykin C. D., Pentikainen T., Pesonen M. (1994) Practical risk theoryfor actuaries. Chapman and Hall.
271

272 Bibliografıa
[12] De Pril N. (1986) On the exact computation of the aggregate claimsdistribution in the individual life model. ASTIN Bulletin, Vol. 16, Num.2, pp. 109–112.
[13] Dickson D. C. M. (2005) Insurance risk and ruin. Cambridge UniversityPress.
[14] Embrechts P., Kluppelberg C., Mikosch T. (1999) Modelling extremalevents for insurance and finance. Springer.
[15] Gerber H. U. (1979) An introduction to mathematical risk theory.Monograph No. 8. S. S. Huebner Foundation for Insurance Education.Wharton School. University of Pennsylvania.
[16] Gerber H. U. (1988) Mathematical fun with the compound binomialprocess. ASTIN Bulletin, Vol. 18, Num 2, pp. 161-168.
[17] Gut A. (2010) Probability: a graduate course. Springer.
[18] Harris B. (1966) Theory of probability. Addison–Wesley.
[19] Hoel P. G., Port S. C., Stone C. J. (1972) Introduction to stochasticprocesses. Hougthon Mifflin Company.
[20] Karlin S., Taylor H. M. (1975) A first course in stochastic processes.Academic Press.
[21] Karr A. F. (1993) Probability. Springer–Verlag.
[22] Kass R., Goovaerts M., Dhaene J., Denuit M. (2001) Modern actuarialrisk theory. Kluwer Academic Publishers.
[23] Klugman S. A., Panjer H. H., Willmot G. E. (2008) Loss models: fromdata to decisions. Wiley.
[24] Li S., Lu Y., Garrido J. (2009) A review of discrete-time risk models.Rev. R. Acad. Cien. serie A. Mat. Vol. 103, Num. 2, pp. 321-337.
[25] Melnikov A. (2003) Risk analysis in finance and insurance. Chapman& Hall/CRC.
[26] Norris J. (1997) Markov chains. Cambridge University Press.

Bibliografıa 273
[27] Panjer H. H. (1981) Recursive evaluation of a family of compound dis-tributions. ASTIN Bulletin, Vol. 12, Num 1, pp. 22–26.
[28] Panjer H. H. (editor) (1986) Actuarial mathematics. Proceedings ofSymposia in Applied Mathematics, Vol. 35, AMS.
[29] Resnick S. (1992) Adventures in stochastic processes. Birkhauser.
[30] Revuz D., Yor M. (1991) Continuous martingales and Brownian mo-tion. Springer-Verlag.
[31] Rincon L. (2012) Introduccion a los procesos estocasticos. Facultad deCiencias, UNAM.
[32] Rolski T., Schmidli H., Teugels J. (1999) Stochastic processes for in-surance and finance. John Wiley & Sons.
[33] Schiff J. L. (1999) The Laplace transform: theory and applications.Springer.
[34] Schmidli H. Lecture notes on risk theory. Manuscrito.
[35] Schmidli H. (2008) Stochastic control in insurance. Springer.
[36] Spiegel M. R. (1968) Mathematical handbook of formulas and tables.Schaum, McGraw-Hill.
[37] Stirzaker D. (2005) Stochastic processes and models. Oxford UniversityPress.
[38] Teugels J. L., Sundt B. (editores) (2004) Encyclopedia of actuarial sci-ence. Wiley.
[39] Tudor C. (1994) Procesos estocasticos. Serie Textos, SociedadMatematica Mexicana.
[40] Williams D. (1991) Probability with martingales. Cambridge UniversityPress.

Indice analıtico
Excess of loss, 98Net profit condition, 72, 164, 200Safety loading, 73Stop loss, 95
Agregado de reclamacionesen el modelo colectivo, 19en el modelo individual, 4
Aproximacionde De Vylder, 233de Edgeworth, 56gama trasladada, 55normal, 8, 53
Asimetrıacoeficiente de Fisher, 252
Aversion al riesgo, 89coeficiente, 89
Cadenas de Markova tiempo continuo, 143a tiempo discreto, 134
Caminatas aleatorias, 132Clase pa, b, 0q, 46Coeficiente
de ajuste, 177, 219, 222de ajuste (cotas), 230de asimetrıa de Fisher, 252de aversion al riesgo, 89
Condicion de ganancia neta, 72,164, 200
Convexidad, 83Convolucion, 259Cramer-Lundberg, 197Credibilidad
americana, 110Bayesiana, 117modelo normal-normal, 121modelo Poisson-gama, 120
clasica, 110completa, 110completa bajo normalidad, 111factor de, 114, 121, 122parcial, 114
De Prilformula de, 9
De Vylderaproximacion de, 233
Deducible, 97Desigualdad
de Jensen, 83, 253de Jensen condicional, 254de Lundberg, 220, 227, 228de Lundberg (tiempo discre-
to), 180de Markov, 253
274

Indice analıtico 275
Distribucion
Bernoulli, 263
beta, 263
binomial, 264
binomial compuesta, 23
binomial neg. compuesta, 24
binomial negativa, 264
Cauchy, 264
con cola ligera, 219, 223
con cola pesada, 223
de clase pa, b, 0q, 46
Erlang, 265
exponencial, 265
gama, 265
geometrica, 264, 265
geometrica compuesta, 24
ji-cuadrada, 266
log normal, 266
normal, 266
Pareto, 267
Poisson, 267
Poisson compuesta, 25
Poisson compuesta mixta, 32
t de Student, 267
tipo fase continua, 151
tipo fase discreta, 136
Weibull, 268
Espacio
de prob. filtrado, 131
Esperanza condicional, 253
Esscher
principio de, 78
transformada de, 78
Exponencial de una matriz, 153
Exponente de Lundberg, 219, 222
Formula
–s de Seal, 209
de De Pril, 9, 37, 38
de Panjer, 45
de Pollaczek-Khinchin, 235
Factor
de credibilidad, 114, 121, 122
de recargo, 73
Filtracion, 131
natural, 131
Funcion
convexa, 83
de supervivencia, 165
de utilidad, 74, 251
de valor, 76
delta de Kronecker, 146
gama, 250
generadora de prob., 249
indicadora, 249
Funciones de utilidad
equivalencia, 251
Integral
de Riemann-Stieltjes, 255
Jensen
desigualdad de, 253
desigualdad de J. condicional,254
Laplace
transformada de, 259
Ley de los grandes numeros, 258
Lundberg
desigualdad de, 220, 227, 228
desigualdad de (tiempo discre-to), 180

276 Indice analıtico
exponente de, 219, 222
Metodo
de Newton-Raphson, 261
Markov
desigualdad de, 253
Martingala
de de Moivre, 160
del juego de apuestas, 160
del proceso con inc. indepen-dientes, 160
del proceso de Poisson centra-do, 160
Martingalas, 154
Matriz
de prob. de transicion, 135
de subintensidades, 151
exponencial de una, 153
Modelo
binomial compuesto, 23
binomial neg. compuesto, 24
colectivo, 18
colectivo Poisson, 25
de Cramer-Lundberg, 197
individual, 3
normal-normal, 121
Poisson compuesto, 25
asociado, 26
como lımite, 27, 29
como suma, 30
con reclamaciones clasificadas,30
mixto, 32
Poisson-gama, 120
Momento
limitado, 103
Newton-Raphson, 261Nivel de retencion, 95
Panjerformula de, 45
Parametros infinitesimales, 148Pollaczek-Khinchin, 235Prima, 69
de credibilidad Bayesiana, 119pura de riesgo, 71
Principiode Esscher, 78de la desviacion estandar, 73de la varianza, 73de perdida maxima, 77de utilidad cero, 74del porcentaje, 77del riesgo ajustado, 79del valor esperado, 73del valor medio, 76exponencial, 77
Prob. de ruina, 208con reclamaciones exp, 205con reclamaciones geo, 173con reclamaciones tipo fase, 240horizonte finito, 175, 208horizonte infinito, 167, 202
Problemade la ruina, 166, 202
Procesoa tiempo continuo, 128a tiempo discreto, 128adaptado, 131con inc. estacionarios, 130con inc. independientes, 130de Poisson, 140tiempos de estancia, 141

Indice analıtico 277
de Poisson (superposicion), 158de Poisson (thinning), 159de riesgo, 198tiempo continuo, 197tiempo discreto, 163
de saltos, 144de superavit, 199estocastico, 127submartingala, 155supermartingala, 155trayectoria de un, 129
Propiedadde Markov, 129de perdida de memoria, 142
Reaseguro, 91excess of loss, 98stop loss, 95de perdida maxima, 95no proporcional, 95por exceso de perdida, 98proporcional, 93
Retencionnivel de, 95
Riemann-Stieltjes, 255Riesgo, 2
aversion, 89modelo colectivo, 19modelo individual, 5proceso a tiempo continuo, 197proceso a tiempo discreto, 163
Ruinaen Cramer-Lundberg, 201en tiempo discreto, 166severidad de la, 184, 213
Seal
formulas de, 209Severidad de la ruina, 184, 213Submartingala, 155Supermartingala, 155Supervivencia
funcion de, 165
Teoremacentral del lımite, 258de conv. dominada, 254, 258de conv. monotona, 254, 258
Tiempo— s de estancia, 143de interarribo, 141de paro, 132
Transformadade Esscher, 78de Laplace, 259de Laplace-Stieltjes, 39
Variable aleatoriamixta, 257
Varianza condicional, 257


















