Introduccio´n a la Dina´mica de la Part´ıcula.¡mica I...2. Considere ahora un auto deportivo,...
39
Introducci´ on a la Din´ amica de la Part´ ıcula. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıaMec´anica Facultad de Ingenier´ ıa Mec´anica, El´ ectrica y Electr´onica Universidad de Guanajuato. Salamanca, Gto. 36730, M´ exico E-mail: [email protected] September 2, 2019 Abstract Estas notas tienen por objetivo enfatizar los conceptos fundamentales que se aplican en el estudio de la Din´ amica de la Part´ ıcula. De modo que el lector centre su atenci´on en esos fundamentos y no se pierda en los detalles, no tan importantes, que se necesitan para “resolver” problemas. 1 Fundamentos de la din´ amica de la part´ ıcula. La Din´amica se define como aquella parte de la f´ ısica que estudia la relaci´ on entre el movimiento de las part´ ıculas y cuerpos y el tiempo, adem´ as, la din´ amica estudia la relaci´ on con las fuerzas aplicadas a las part´ ıculas y cuerpos y el movimiento producido por las fuerzas. La din´ amica emplea dos modelos para estudiar los objetos f´ ısicos, la part´ ıcula y el cuerpo r´ ıgido. El diccionario de la real academia espa˜ nola propone la siguiente definici´on de una part´ ıcula Definici´on:Part´ ıcula. Parte peque˜ na de materia. Debemos a˜ nadir, inicialmente, que para prop´ositos de la cinem´ atica, la part´ ıcula es tan peque˜ na que es imposible observar un movimiento de rotaci´on. La rotaci´on es un fen´omeno que depende de la orientaci´ on de las l´ ıneas del objeto, de modo que si es imposible dibujar l´ ıneas en el objeto es imposible determinar si el objeto ha sufrido una rotaci´on. Por otro lado, un cuerpo r´ ıgido se define como Definici´on: Cuerpo R´ ıgido. Un cuerpo r´ ıgido es una agrupaci´on, usualmente continua, de part´ ıculas con una propiedad fundamental: La distancia entre dos part´ ıculas cualesquiera del cuerpo r´ ıgido permanece invariable; es decir, constante. Otra manera de definir un cuerpo r´ ıgido es indicar que es un cuerpo que no admite deformaci´ on alguna; es decir, es indeformable. Sin embargo, desde el punto de vista de la cinem´ atica, una part´ ıcula es un objeto, cuyas dimensiones no son importantes, pero en el cual no existe rotaci´on alguna o bien donde la rotaci´on no es importante para el an´ alisis del fen´ omeno a estudiar. Por el contrario, un cuerpo r´ ıgido es un objeto indeformable para el cual el movimiento de rotaci´on es importante para el an´ alisis del fen´ omeno a estudiar. Evidentemente, la palabra importancia es la clave de esta distinci´ on, pero al mismo tiempo importancia es un t´ ermino subjetivo que depende del conocimiento y experiencia de la persona que realiza el an´alisis. A continuaci´on, se presentan dos ejemplos para clarificar este punto 1. Considere un avi´on, si el objetivo del an´alisis es determinar el tiempo que el avi´on requiere para llegar de una ciudad a otra, tomando en cuenta las trayectorias, no siempre rectas, que el avi´on debe tomar al despegar, al orientarse para aterrizar o al evitar una tormenta el´ ectrica, el objeto, en este caso un avi´on, de dimensiones considerables, puede considerarse como una part´ ıcula. Si por el contrario, el objetivo del an´alisis es determinar la rotaci´on que sufre el avi´on cuando aterriza bajo la influencia de una tormenta y la posibilidad de que las alas del avi´on, impacten la pista y provoquen un accidente, es entonces evidente que el mismo objeto, el avi´on, debe considerarse como un cuerpo r´ ıgido. 1 1 A´ un mas, en algunos casos, como cuando se analiza la vibraci´on de las alas del avi´ on debido a las turbulencias generadas por el estado del clima a una altura muy elevada, el mismo objeto, el avi´ on, deber´ a modelarse como un cuerpo deformable. 1
Transcript of Introduccio´n a la Dina´mica de la Part´ıcula.¡mica I...2. Considere ahora un auto deportivo,...
Introduccion a la Dinamica de la Partıcula.
Jose Marıa Rico Martınez
Departamento de Ingenierıa Mecanica
Facultad de Ingenierıa Mecanica, Electrica y Electronica
Universidad de Guanajuato.
Salamanca, Gto. 36730, Mexico
E-mail: [email protected]
September 2, 2019
Abstract
Estas notas tienen por objetivo enfatizar los conceptos fundamentales que se aplican en el estudio de laDinamica de la Partıcula. De modo que el lector centre su atencion en esos fundamentos y no se pierda enlos detalles, no tan importantes, que se necesitan para “resolver” problemas.
1 Fundamentos de la dinamica de la partıcula.
La Dinamica se define como aquella parte de la fısica que estudia la relacion entre el movimiento de las
partıculas y cuerpos y el tiempo, ademas, la dinamica estudia la relacion con las fuerzas aplicadas
a las partıculas y cuerpos y el movimiento producido por las fuerzas. La dinamica emplea dos modelos paraestudiar los objetos fısicos, la partıcula y el cuerpo rıgido. El diccionario de la real academia espanolapropone la siguiente definicion de una partıcula
Definicion: Partıcula. Parte pequena de materia. Debemos anadir, inicialmente, que para propositos dela cinematica, la partıcula es tan pequena que es imposible observar un movimiento de rotacion. La rotacion esun fenomeno que depende de la orientacion de las lıneas del objeto, de modo que si es imposible dibujar lıneasen el objeto es imposible determinar si el objeto ha sufrido una rotacion.
Por otro lado, un cuerpo rıgido se define comoDefinicion: Cuerpo Rıgido. Un cuerpo rıgido es una agrupacion, usualmente continua, de partıculas
con una propiedad fundamental: La distancia entre dos partıculas cualesquiera del cuerpo rıgido
permanece invariable; es decir, constante. Otra manera de definir un cuerpo rıgido es indicar que es uncuerpo que no admite deformacion alguna; es decir, es indeformable.
Sin embargo, desde el punto de vista de la cinematica, una partıcula es un objeto, cuyas dimensiones
no son importantes, pero en el cual no existe rotacion alguna o bien donde la rotacion no es
importante para el analisis del fenomeno a estudiar. Por el contrario, un cuerpo rıgido es un objeto
indeformable para el cual el movimiento de rotacion es importante para el analisis del fenomeno
a estudiar. Evidentemente, la palabra importancia es la clave de esta distincion, pero al mismo tiempoimportancia es un termino subjetivo que depende del conocimiento y experiencia de la persona que realiza elanalisis. A continuacion, se presentan dos ejemplos para clarificar este punto
1. Considere un avion, si el objetivo del analisis es determinar el tiempo que el avion requiere para llegarde una ciudad a otra, tomando en cuenta las trayectorias, no siempre rectas, que el avion debe tomar aldespegar, al orientarse para aterrizar o al evitar una tormenta electrica, el objeto, en este caso un avion,de dimensiones considerables, puede considerarse como una partıcula. Si por el contrario, el objetivo delanalisis es determinar la rotacion que sufre el avion cuando aterriza bajo la influencia de una tormenta yla posibilidad de que las alas del avion, impacten la pista y provoquen un accidente, es entonces evidenteque el mismo objeto, el avion, debe considerarse como un cuerpo rıgido.1
1Aun mas, en algunos casos, como cuando se analiza la vibracion de las alas del avion debido a las turbulencias generadas porel estado del clima a una altura muy elevada, el mismo objeto, el avion, debera modelarse como un cuerpo deformable.
1
2. Considere ahora un auto deportivo, si el objetivo del analisis es determinar a que velocidad el auto se“despistara”, es decir, se saldra de la pista, sin voltearse, al tomar una curva, el objeto, en este casoel auto, puede considerarse como una partıcula. Si por otro lado, el objetivo del analisis es estudiar laposibilidad de que el auto se vuelque al tomar otra curva, el mismo objeto, el auto, debe considerarsecomo un cuerpo rıgido.2
A grandes rasgos, los temas que se estudiaran en la dinamica de las partıculas son:
1. Cinematica de las partıculas. La cinematica estudia las relaciones entre la posicion de la partıcula yel tiempo, incluyendo sus derivadas; es decir, la velocidad y la aceleracion de la partiıcula. Esta parte dela dinamica es puramente matematica y no requiere de la aplicacion de ley fısica alguna. La cinematicade la partıcula se divide en los siguientes temas
(a) Traslacion rectilınea.
(b) Traslacion curvilınea.
• En el plano.
– Coordenadas cartesianas.
– Componentes normal tangencial.
– Coordenadas radial transversal.
• En el espacio.
– Coordenadas cartesianas.
– Coordenadas cilındricas.
– Coordenadas esfericas.
2. Cinetica de las partıculas. La cinetica estudia la relacion entre las fuerzas aplicadas a una partıculay el movimiento resultante. Esta parte de la dinamica requiere la aplicacion de leyes fısicas, en particularla segunda ley de Newton y se divide en los siguientes temas
(a) Aplicacion de la segunda Ley de Newton para determinar el movimiento de una partıcula cuandoesta sujeta a una fuerza o a un conjunto de fuerzas.
(b) Aplicacion del metodo del trabajo y la energıa al movimiento de una partıcula.
(c) Aplicacion del metodo del impulso y el ımpetu al movimiento de una partıcula.
Ahora dirigiremos nuestra atencion a la cinematica de la partıcula, si como se establecio, el objetivo de lacinematica de la partıcula es estudiar las relaciones entre la posicion de la partıcula y el tiempo, incluyendosus derivadas; es decir, la velocidad y la aceleracion de la partıcula. Entonces, es necesario un sistema de
referencia con respecto al cual describir y estudiar esas relaciones. Mas aun, la descripcion de esas relacionesdepende del sistema de referencia empleado. A continuacion se define el concepto de un sistema de referenciade manera explıcita.
Definicion: Sistema de Referencia. Un sistema de referencia es una persona con una regla y un reloj.La regla y el reloj de la persona le permiten —aquı el lector debe usar la imaginacion— observar y cuantificarel movimiento de una o varias partıculas, de manera que si una partıcula arbitraria se denomina P , la personaes capaz de determinar la funcion vectorial ~rP , como funcion del tiempo; es decir,
~rP = ~rP (t), (1)
donde el vector ~rP , conocido como vector de posicion de la partıcula P , va desde un origen predeterminado porla persona, por ejemplo, el centro de su mano, a la partıcula P .
Es importante senalar que en el concepto de sistema de referencia no existe indicacion alguna acerca deltipo de sistema coordenado empleado por la persona, que define el sistema de referencia, para descomponerel vector.3 En otras palabras, la persona esta en libertad de emplear coordenadas cartesianas, cilındricas oesfericas. Vea la figura 1.
Dependiendo del estado de movimiento de la persona que define el sistema de referencia, es posible clasificarlos sistemas de referencia en
2Nuevamente, si el objetivo del analisis es determinar los efectos del impacto del auto, aun cuando sea a baja velocidad, el autodebera modelarse como un cuerpo deformable.
3Desafortunadamente, como los sistemas coordenados cartesianos son los mas frecuentemente usados, los estudiantes de lacinematica asumen, de inmediato y de manera erronea, que un sistema de referencia implica necesariamente el empleo de coordenadascartesianas.
2
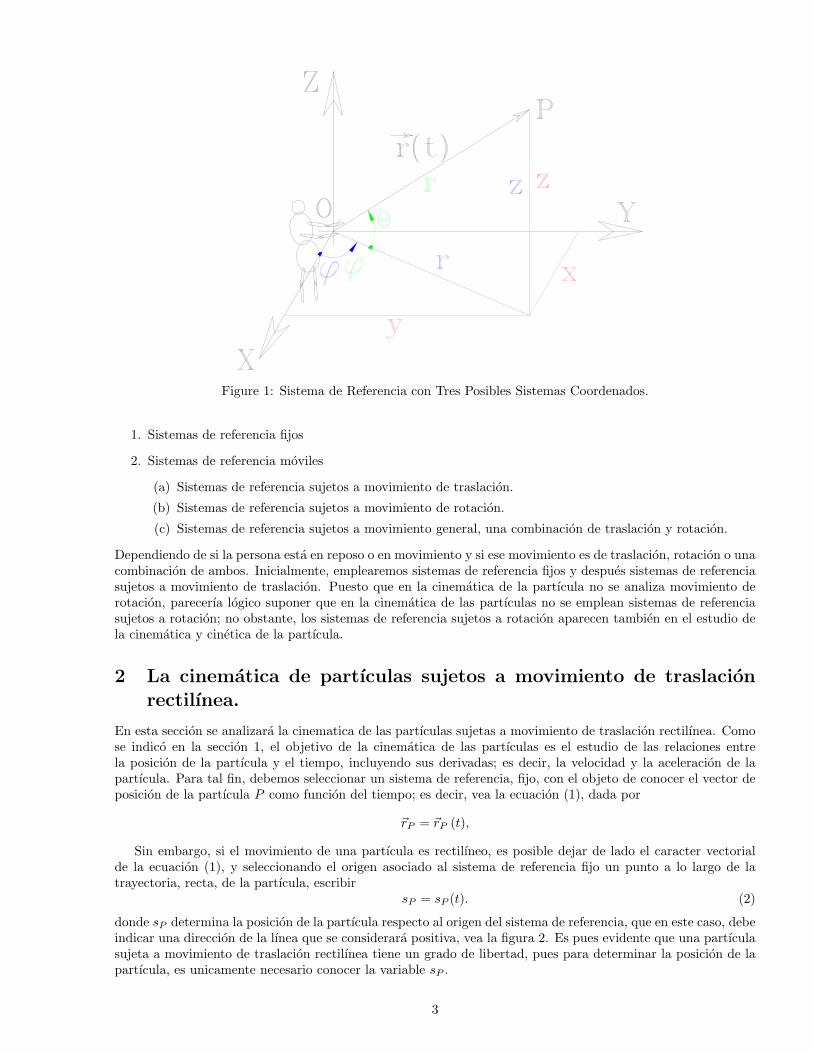
Figure 1: Sistema de Referencia con Tres Posibles Sistemas Coordenados.
1. Sistemas de referencia fijos
2. Sistemas de referencia moviles
(a) Sistemas de referencia sujetos a movimiento de traslacion.
(b) Sistemas de referencia sujetos a movimiento de rotacion.
(c) Sistemas de referencia sujetos a movimiento general, una combinacion de traslacion y rotacion.
Dependiendo de si la persona esta en reposo o en movimiento y si ese movimiento es de traslacion, rotacion o unacombinacion de ambos. Inicialmente, emplearemos sistemas de referencia fijos y despues sistemas de referenciasujetos a movimiento de traslacion. Puesto que en la cinematica de la partıcula no se analiza movimiento derotacion, parecerıa logico suponer que en la cinematica de las partıculas no se emplean sistemas de referenciasujetos a rotacion; no obstante, los sistemas de referencia sujetos a rotacion aparecen tambien en el estudio dela cinematica y cinetica de la partıcula.
2 La cinematica de partıculas sujetos a movimiento de traslacion
rectilınea.
En esta seccion se analizara la cinematica de las partıculas sujetas a movimiento de traslacion rectilınea. Comose indico en la seccion 1, el objetivo de la cinematica de las partıculas es el estudio de las relaciones entrela posicion de la partıcula y el tiempo, incluyendo sus derivadas; es decir, la velocidad y la aceleracion de lapartıcula. Para tal fin, debemos seleccionar un sistema de referencia, fijo, con el objeto de conocer el vector deposicion de la partıcula P como funcion del tiempo; es decir, vea la ecuacion (1), dada por
~rP = ~rP (t),
Sin embargo, si el movimiento de una partıcula es rectilıneo, es posible dejar de lado el caracter vectorialde la ecuacion (1), y seleccionando el origen asociado al sistema de referencia fijo un punto a lo largo de latrayectoria, recta, de la partıcula, escribir
sP = sP (t). (2)
donde sP determina la posicion de la partıcula respecto al origen del sistema de referencia, que en este caso, debeindicar una direccion de la lınea que se considerara positiva, vea la figura 2. Es pues evidente que una partıculasujeta a movimiento de traslacion rectilınea tiene un grado de libertad, pues para determinar la posicion de lapartıcula, es unicamente necesario conocer la variable sP .
3

Figure 2: Sistema de Referencia en Traslacion Rectilınea.
Entonces, es posible definir las dos tareas principales de la cinematica de partıculas sujetas a traslacionrectilınea:
1. Analisis del movimiento de una partıcula sujeto a traslacion rectilınea. Es decir, a partir de la ecuacionsP (t), determinar la velocidad, vP (t), y la aceleracion, aP (t), de la partıcula, entre otras cosas.
2. Derivacion de la ecuacion de movimiento de una partıcula sujeto a traslacion rectilınea. Es decir, apartir de la ecuacion de la aceleracion de la partıcula, aP (t), determinar la ecuacion de movimiento de lapartıcula, sP (t).
2.1 Analisis del movimiento de una partıcula sujeto a traslacion rectilınea.
Considere una partıcula, P , cuyo movimiento de traslacion rectilınea esta representado, respecto a un sistemade referencia, por la ecuacion (2)
sP = sP (t).
Entonces, la velocidad de la partıcula, P , estara dada por
vP (t) =d sP (t)
d t= sP (t), (3)
y la aceleracion de partıcula, P , estara dada por
aP (t) =d vP (t)
d t=
d2 sP (t)
d t2= sP (t). (4)
2.2 Derivacion de la ecuacion de movimiento de una partıcula sujeto a traslacion
rectilınea.
En esta seccion supondremos que conocemos la ecuacion de la aceleracion de una partıcula, aP = aP (t), y apartir de esta ecuacion trataremos de encontrar la ecuacion de movimiento del sistema; es decir sP = sP (t). Enel caso mas general, la aceleracion puede ser una funcion del tiempo, de la posicion y de la velocidad; es decir
aP = aP (t, sP , vP ) = aP
(
t, sP (t),d sP (t)
d t
)
=d2 sP (t)
d t2. (5)
La ecuacion (5) representa una ecuacion diferencial de segundo orden, que puede ser no lineal, y que engeneral no tiene una solucion en forma cerrada, pero que si satisface las condiciones de existencia y unicidad dela ecuacion diferencial, tiene una solucion que puede obtenerse de forma numerica. Esta ecuacion diferencial seescribe, de manera generica, como
d2 sP (t)
d t2= aP
(
t, sP (t),d sP (t)
d t
)
. (6)
4
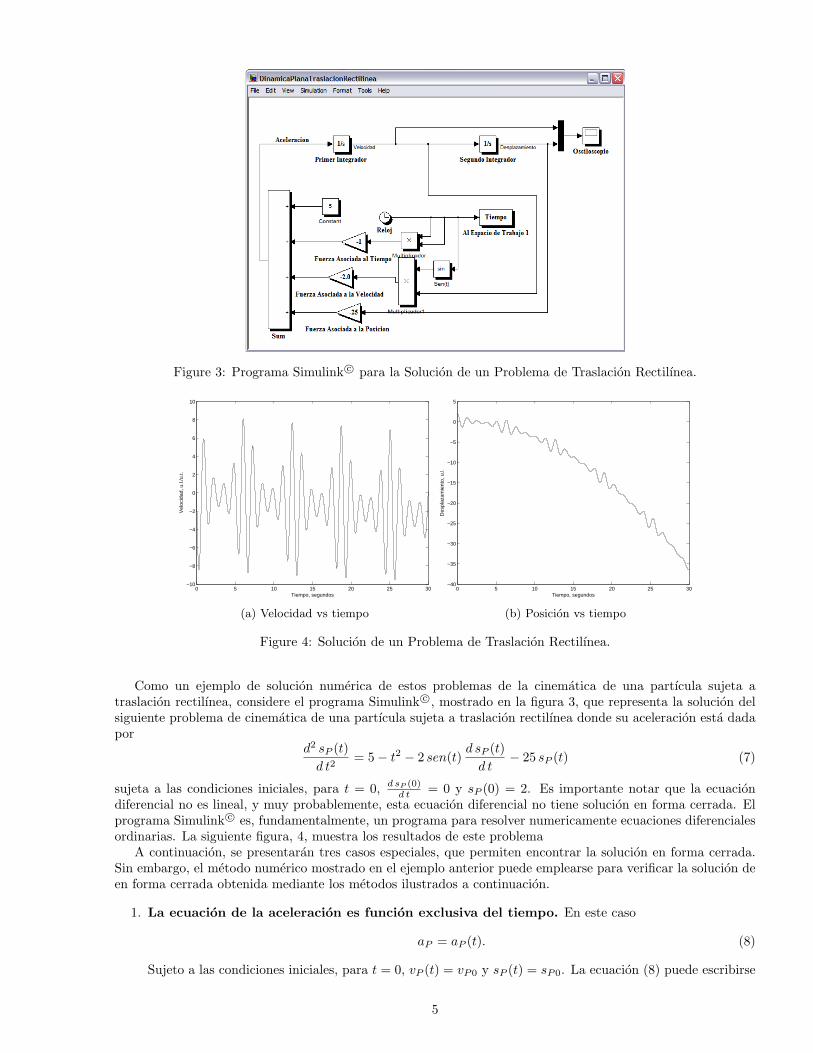
Figure 3: Programa Simulink c© para la Solucion de un Problema de Traslacion Rectilınea.
0 5 10 15 20 25 30−10
−8
−6
−4
−2
0
2
4
6
8
10
Tiempo, segundos
Vel
ocid
ad, u
.l./u
.t.
(a) Velocidad vs tiempo
0 5 10 15 20 25 30−40
−35
−30
−25
−20
−15
−10
−5
0
5
Tiempo, segundos
Des
plaz
amie
nto,
u.l.
(b) Posicion vs tiempo
Figure 4: Solucion de un Problema de Traslacion Rectilınea.
Como un ejemplo de solucion numerica de estos problemas de la cinematica de una partıcula sujeta atraslacion rectilınea, considere el programa Simulink c©, mostrado en la figura 3, que representa la solucion delsiguiente problema de cinematica de una partıcula sujeta a traslacion rectilınea donde su aceleracion esta dadapor
d2 sP (t)
d t2= 5− t2 − 2 sen(t)
d sP (t)
d t− 25 sP (t) (7)
sujeta a las condiciones iniciales, para t = 0, d sP (0)d t = 0 y sP (0) = 2. Es importante notar que la ecuacion
diferencial no es lineal, y muy probablemente, esta ecuacion diferencial no tiene solucion en forma cerrada. Elprograma Simulink c© es, fundamentalmente, un programa para resolver numericamente ecuaciones diferencialesordinarias. La siguiente figura, 4, muestra los resultados de este problema
A continuacion, se presentaran tres casos especiales, que permiten encontrar la solucion en forma cerrada.Sin embargo, el metodo numerico mostrado en el ejemplo anterior puede emplearse para verificar la solucion deen forma cerrada obtenida mediante los metodos ilustrados a continuacion.
1. La ecuacion de la aceleracion es funcion exclusiva del tiempo. En este caso
aP = aP (t). (8)
Sujeto a las condiciones iniciales, para t = 0, vP (t) = vP0 y sP (t) = sP0. La ecuacion (8) puede escribirse
5

comod vPd t
= aP (t), o d vP = aP (t) d t. (9)
e integrando, respecto al tiempo, se tiene que
vP (t) =
∫
aP (t) d t+ C1, (10)
donde C1 es una constante de integracion, que se determina por medio de la condicion inicial, para t = 0,vP (t) = vP0. Suponga que despues de encontrar el valor de C1, se tiene que
vP = vP (t) (11)
La ecuacion (11) puede escribirse como
d sPd t
= vP (t), o d sP = vP (t) d t. (12)
e integrando, respecto al tiempo, se tiene que
sP (t) =
∫
vP (t) d t+ C2, (13)
donde C2 es una constante de integracion, que se determina por medio de la condicion inicial, para t = 0,sP (t) = sP0. Despues de encontrar el valor de C2, se tiene que
sP = sP (t) (14)
2. La ecuacion de la aceleracion es funcion exclusiva de la velocidad. En este caso
aP = aP (v). (15)
Sujeto a las condiciones iniciales, para t = 0, vP (t) = vP0 y sP (t) = sP0. La ecuacion (15) puede escribirsecomo
d vPd t
= aP (vP ), od vP
aP (vP )= d t. (16)
e integrando, respecto al tiempo, se tiene que
t =
∫
d vPaP (vP )
+ C1, (17)
Sustituyendo la condicion inicial t = 0, vP (t) = vP0, es posible conocer la constante de integracion C1.De manera que es, al menos teoricamente posible, escribir la siguiente ecuacion
t = f(vP )
suponga, que de esta ecuacion es posible despejar vP , entonces, es posible escribir
vP = f−1(t) (18)
Por lo que, finalmente, la ecuacion (18), puede espresarse como
d sPd t
= f−1(t), o d sP = f−1(t) d t.
Finalmente, integrando respecto al tiempo, se tiene que
sP =
∫
f−1(t) d t+ C2
Sustitiyendo la condicion inicial para t = 0 sP (t) = sP0, es posible determinar la constante de integracionC2 y escribir
sP = h(t). (19)
6
3. La ecuacion de la aceleracion es funcion exclusiva de la posicion. En este caso
aP = aP (s). (20)
Sujeto a las condiciones iniciales, para t = 0, vP (t) = vP0 y sP (t) = sP0. A primera vista, este problema,aparece mucho mas complicado, pues, de inicio, la unica relacion que tenemos es la ecuacion (4)
aP =d2 sPd t2
=d vPd t
Sin embargo, de la ecuacion (3)
vP =d sPd t
Es posible escribir
d t =d sPvP
De manera que sustituyendo este ultimo resultado, en la ecuacion (4), se tiene que
aP (s) =d vPd t
=d vPd sPvP
=vP d vPd sP
(21)
Integrando la ecuacion, se tiene que, al menos teoricamente es posible escribir
aP (s) d sP = vP d vP o1
2v2P =
∫
aP (s) d sP + C1
Sustituyendo la condicion inicial para vP (t) = vP0, sP (t) = sP0, se puede determinar la constante inicialC1. Ademas, se tiene que
vP =
√
2
∫
aP (s) d sP + C1
de manera que, es posible integrar nuevamente y obtener
d sP√
2∫
aP (s) d sP + C1
= d t (22)
Integrando, respecto al tiempo, la ecuacion (22), se tiene que
t =
∫
d sP√
2∫
aP (s) d sP + C1
+ C2
La condicion inicial, para t = 0, sP (t) = sP0 permite determinar la constante de integracion C2 y resolverel problema. De modo que es, al menos teoricamente posible escribir
t = g(sP ) o sP = g−1(t) (23)
3 Movimiento Uniforme y Movimiento Uniformemente Acelerado.
Dentro de la cinematica de la partıcula sujeto a movimiento de traslacion rectilınea existen dos tipos especialesde movimiento que por su importanacia, requieren de un tratamiento aparte y detallado. Esos movimientos sedenominan:
1. Movimiento Uniforme. Este movimiento se define como el movimiento de una partıcula, P , sujeta
a traslacion rectilınea que ocurre con velocidad constante.
2. Movimiento Uniformemente Acelerado. Este movimiento se define como el movimiento de una
partıcula, P , sujeta a traslacion rectilınea que ocurre con aceleracion constante.
A continuacion, se analizan cada uno de estos movimientos
7

Figure 5: Graficas de la Velocidad y de la Posicion para una Partıcula Sujeta a Movimiento Uniforme.
3.1 Movimiento Uniforme
Si la velocidad de la partıcula, P , es constante; es decir
vP (t) = vP ,
donde vP es constante, sujeto a la condicion inicial t = 0, sP (0) = sP0, se tiene que
aP (t) =dvP (t)
d t=
dvPd t
= 0. (24)
La conclusion es que la aceleracion de este movimiento es nula. Por otro lado, la posicion de la partıcula P , sedetermina integrando la ecuacion, dado por
d sPd t
= vP (t) = vP , o d sP = vP d t.
Integrando la ecuacion, se tiene que
sP =
∫
vP d t = vP t+ C1.
Sustituyendo la condicion inicial t = 0, sP (t) = sP0, se tiene que
sP0 = vP 0 + C1, Por lo tanto C1 = sP0
y, entoncessP (t) = sP0 + vP t. (25)
La grafica 5 muestra las funciones para la velocidad y el desplazamiento de una partıcula sujeta a movimientouniforme.
3.2 Movimiento Uniformemente Acelerado
Si la aceleracion de la partıcula, P , es constante; es decir
aP (t) = aP ,
donde aP es constante, sujeto a la condicion inicial t = 0, vP (0) = vP0 y sP (0) = sP0, se tiene que
aP (t) =dvP (t)
d t= aP . (26)
Por otro lado, velocidad de la partıcula P , se determina integrando la ecuacion, dado por
d vPd t
= aP , o d vP = aP d t.
8

Integrando la ecuacion, se tiene que
vP (t) =
∫
aP d t = aP t+ C1.
Sustituyendo la condicion inicial t = 0, vP (0) = vP0, se tiene que
vP0 = aP 0 + C1, por lo tanto C1 = vP0
y, entoncesvP (t) = vP0 + aP t. (27)
De manera semejante, posicion de la partıcula P , se determina integrando la ecuacion (27), dada por
d sPd t
= vP0 + aP t, o sP (t) =
∫
(vP0 + aP t) d t.
Integrando la ecuacion, se tiene que
sP (t) = vP0 t+1
2aP t2 + C2
Sustituyendo la condicion inicial t = 0, sP (0) = sP0, se tiene que
sP0 = vP0 0 +1
2aP 02 + C2, por lo tanto C2 = sP0
y, entonces
sP (t) = sP0 + vP0 t+1
2aP t2. (28)
Sin embargo, en este caso, es posible encontrar otra ecuacion que relaciona la posicion y la velocidad de lapartıcula. Recordando la ecuacion (21)
aP =vP d vPd sP
sujeto a la condicion inicial t = 0, vP (0) = vP0 y sP (0) = sP0, entonces es posible integrar∫
aP d sP =
∫
vP d vP o aP sP =1
2v2P + C3.
Entonces, sustituyendo la condicion inicial vP (0) = vP0 y sP (0) = sP0, se tiene que
aP sP0 =1
2v2P0 + C3, por lo tanto C3 = aP sP0 −
1
2v2P0
La sustitucion de esta constante arbitraria conduce a
aP (sP − sP0) =1
2
(
v2P − v2P0
)
(29)
Las ecuaciones (27, 28, 29) permiten analizar el movimiento de una partıcula sujeto a movimiento uniforme-mente acelerado, las graficas de la aceleracion, velocidad y posicion se muestran en la figura 6
4 Sistemas de Referencias Moviles.
Hasta este punto, los unicos sistemas de referencia que hemos usado son sistemas de referencia fijos, sinembargo, el estudio de la cinematica de la partıcula permite introducir de manera muy natural a sistemas de
referencia movil sujetos a traslacion rectilınea.
Considere la siguiente situacion, suponga que dos autos de carrera, denominados A y B, estan compitiendoentre sı a lo largo de una pista recta. Ambos autos estan siendo observados desde una base fija, denominadaC, sin embargo, el auto A que esta perdiendo la carrera, tambien observa el movimiento del auto B que estaganando la carrera, vea la figura 7.
La base fija C, junto con una persona con regla y reloj, representa un sistema de referencia fijo, desde elcual se observa el movimiento de los autos A y B, mediante las ecuaciones
sA(t) = sA(t) y sB(t) = sB(t)
9

Figure 6: Graficas de la Velocidad y Posicion para una Partıcula Sujeta a Movimiento Uniformemente Acelerado.
Figure 7: Sistemas de Referencia, Fijos y Moviles, en Traslacion Rectilınea.
y mediante estas ecuaciones es posible determinar las velocidades y aceleraciones de los autos A y B respectoal sistema de referencia fijo representado por el punto C. Estas posiciones, velocidades y aceleraciones sedenominan absolutas.. Por otro lado, el conductor del auto A junto con un reloj y una regla, puede analizarel movimiento del auto B respecto de si mismo, el desplazamiento esta dado por
sB/A(t) = sB(t)− sA(t). (30)
A partir de esta ecuacion, es posible determinar la velocidad y aceleracion del auto B tal como lo percibe elconductor del auto A, la posicion, velocidad y aceleracion del auto B tal como lo observa el conductor del autoA se denominan la posicion, velocidad y aceleracion del auto B respecto a un sistema de referen-
cia, sujeto a traslacion rectilınea con la posicion, velocidad y aceleracion del carro A. Como estadescripcion es demasiado largo, frecuentemente se abusa del lenguaje y se denominan la posicion, velocidad
y aceleracion del auto B relativa al auto A.
Derivando repetidamente la ecuacion (30), se tiene que
vB/A(t) =d sB/A(t)
d t=
d sB(t)
d t− d sA(t)
d t= vB(t)− vA(t) (31)
y
aB/A(t) =d2 sB/A(t)
d t2=
d2 sB(t)
d t2− d2 sA(t)
d t2=
d vB(t)
d t− d vA(t)
d t= aB(t)− aA(t) (32)
Las cantidades vB/A(t) y aB/A(t) se denominan la velocidad, y la aceleracion, del auto o partıcula
B relativa al auto o partıcula A. Estas expresiones son un abuso del lenguaje y la determinacion correctadebiera ser la velocidad, y la aceleracion, del auto o partıcula B tal como se observa desde un
sistema de referencia movil, sujeto a traslacion, con una velocidad y aceleracion igual a la del
auto o partıcula A. Obviamente, esta oracion es demasiado larga y frecuentemente abusamos del lenguaje;
10
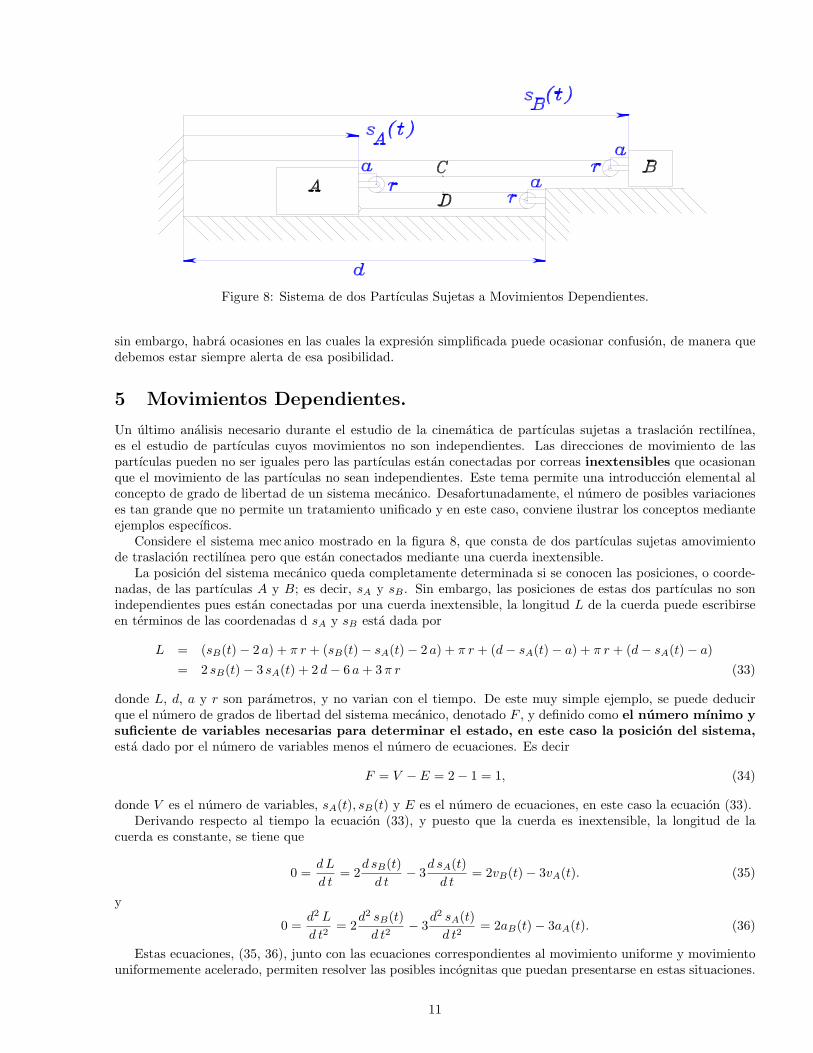
Figure 8: Sistema de dos Partıculas Sujetas a Movimientos Dependientes.
sin embargo, habra ocasiones en las cuales la expresion simplificada puede ocasionar confusion, de manera quedebemos estar siempre alerta de esa posibilidad.
5 Movimientos Dependientes.
Un ultimo analisis necesario durante el estudio de la cinematica de partıculas sujetas a traslacion rectilınea,es el estudio de partıculas cuyos movimientos no son independientes. Las direcciones de movimiento de laspartıculas pueden no ser iguales pero las partıculas estan conectadas por correas inextensibles que ocasionanque el movimiento de las partıculas no sean independientes. Este tema permite una introduccion elemental alconcepto de grado de libertad de un sistema mecanico. Desafortunadamente, el numero de posibles variacioneses tan grande que no permite un tratamiento unificado y en este caso, conviene ilustrar los conceptos medianteejemplos especıficos.
Considere el sistema mec anico mostrado en la figura 8, que consta de dos partıculas sujetas amovimientode traslacion rectilınea pero que estan conectados mediante una cuerda inextensible.
La posicion del sistema mecanico queda completamente determinada si se conocen las posiciones, o coorde-nadas, de las partıculas A y B; es decir, sA y sB . Sin embargo, las posiciones de estas dos partıculas no sonindependientes pues estan conectadas por una cuerda inextensible, la longitud L de la cuerda puede escribirseen terminos de las coordenadas d sA y sB esta dada por
L = (sB(t)− 2 a) + π r + (sB(t)− sA(t)− 2 a) + π r + (d− sA(t)− a) + π r + (d− sA(t)− a)
= 2 sB(t)− 3 sA(t) + 2 d− 6 a+ 3π r (33)
donde L, d, a y r son parametros, y no varian con el tiempo. De este muy simple ejemplo, se puede deducirque el numero de grados de libertad del sistema mecanico, denotado F , y definido como el numero mınimo y
suficiente de variables necesarias para determinar el estado, en este caso la posicion del sistema,
esta dado por el numero de variables menos el numero de ecuaciones. Es decir
F = V − E = 2− 1 = 1, (34)
donde V es el numero de variables, sA(t), sB(t) y E es el numero de ecuaciones, en este caso la ecuacion (33).Derivando respecto al tiempo la ecuacion (33), y puesto que la cuerda es inextensible, la longitud de la
cuerda es constante, se tiene que
0 =dL
d t= 2
d sB(t)
d t− 3
d sA(t)
d t= 2vB(t)− 3vA(t). (35)
y
0 =d2 L
d t2= 2
d2 sB(t)
d t2− 3
d2 sA(t)
d t2= 2aB(t)− 3aA(t). (36)
Estas ecuaciones, (35, 36), junto con las ecuaciones correspondientes al movimiento uniforme y movimientouniformemente acelerado, permiten resolver las posibles incognitas que puedan presentarse en estas situaciones.
11

Figure 9: Sistema de Cuatro Partıculas Sujetas a Movimientos Dependientes.
Es perfectamente posible, que una situacion involucre al mismo tiempo movimientos dependientes y movimien-tos relativos, como muestra el sistema mecanico ilustrado en la figura 9.
La posicion del sistema mecanico esta completamente determinado si se conocen las posiciones sA, sB , SC ,y sD. Sin embargo, los cuatro cuerpos estan unidos mediante tres cuerdas inextensibles cuyas longitudes estandadas por:
1. Cuerda 1, que une los cuerpos A y B.
L1 = sA + sB − 2 a+ π r. (37)
2. Cuerda 2, que une los cuerpos B y D.
L2 = sB + 2 sD − 4 a+ 2π r. (38)
3. Cuerda 3, que une los cuerpos B, C y D.
L3 = sC/B + sC/D − 2 a+ d+ π r = 2 sC − sB − sD − 2 a+ d+ π r, (39)
donde d, a y r son parametros, y no varian con el tiempo. Nuevamente, se puede deducir que el numero degrados de libertad del sistema mecanico, denotado F , y definido como el numero mınimo y suficiente de
variables necesarias para determinar el estado, en este caso la posicion del sistema, esta dado porel numero de variables menos el numero de ecuaciones. Es decir
F = V − E = 4− 3 = 1, (40)
donde V es el numero de variables, sA(t), sB(t), sC(t), sD(t) y E es el numero de ecuaciones, en este caso lasecuaciones (37, 38, 39).
Derivando las ecuaciones (37, 38, 39) repetidamente respecto al tiempo, se tiene que
0 =dL1
d t=
d sA(t)
d t+ 3
d sB(t)
d t= vA(t) + vB(t) (41)
0 =dL2
d t=
d sB(t)
d t+ 2
d sD(t)
d t= vB(t) + 2 vD(t) (42)
0 =dL3
d t= 2
d sC(t)
d t+
d sB(t)
d t− d sD(t)
d t= 2 vC(t) + vB(t)− vD(t). (43)
y
0 =d2 L1
d t2=
d2 sA(t)
d t2+ 3
d2 sB(t)
d t2= aA(t) + aB(t) (44)
0 =d2 L2
d t2=
d2 sB(t)
d t2+ 2
d2 sD(t)
d t2= aB(t) + 2 aD(t) (45)
0 =d2 L3
d t2= 2
d2 sC(t)
d t2+
d2 sB(t)
d t2− d2 sD(t)
d t2= 2 aC(t) + aB(t)− aD(t). (46)
12

Estas ecuaciones, (41, 42, 43, 44, 45, 46 ), junto con las ecuaciones correspondientes al movimiento uniformey movimiento uniformemente acelerado, permiten resolver las posibles incognitas que puedan presentarse enestas situaciones.
6 Problemas Propuestos.
Problema 1. El movimiento de una partıcula se define mediante la relacion s(t) = t3 − 6 t2 + 9 t+ 5, donde sse expresa en pies y t en segundos. Determine a) el momento para el cual la velocidad es 0, b) la posicion, laaceleracion y la distancia total recorrida cuando t = 5 s.
Solucion. Primeramente derivaremos con respecto al tiempo la ecuacion de la posicion para encontrar lasecuaciones de la velocidad y la aceleracion.
v(t) =d s
d t= 3 t2 − 12 t+ 9 (47)
y
a(t) =d2 s
d t2=
d v
d t= 6 t− 12 (48)
Por lo tanto, la posicion, velocidad y aceleracion de la partıcula para t = 5s. estan dados por
s(5) = s∣
∣
∣
t=5= 25 ft. v(5) = v
∣
∣
∣
t=5= 24 ft./s. a(5) = a
∣
∣
∣
t=5= 18 ft./s2
La grafica de la posicion como funcion del tiempo esta dado por la figura 10.
10
20
40
Tiempo t, s.
651
Posicion s, ft30
0
60
43
50
2
Figure 10: Grafica de la posicion de la partıcula versus el tiempo.
De la figura, puede observarse que la direccion del movimiento de la partıcula cambia de direccion, por lotanto, es necesario determinar los valores de tiempo para los cuales la velocidad se hace 0, y el movimiento,puede, cambiar de direccion. Igualando la ecuacion de la velocidad a 0, las raices de la ecuacion son
t1 = 1 s. y t2 = 3 s.
Para determinar la distancia recorrida por la partıcula durante el intervalo 0 ≤ t ≤ 5, se tiene que
∆(s) = |s(5)− s(3)|+ |s(3)− s(1)|+ |s(1)− s(0)| = |25− 5|+ |5− 9|+ |9− 5| = 20ft.+ 4ft.+ 4ft. = 28 ft.
Problema 1a Una muchacha opera un modelo de carro controlado a distancia en un estacionamiento vacio,vea la figura 11. La posicion de la muchacha esta en el origen de los ejes coordenados xy y la superficie del
13
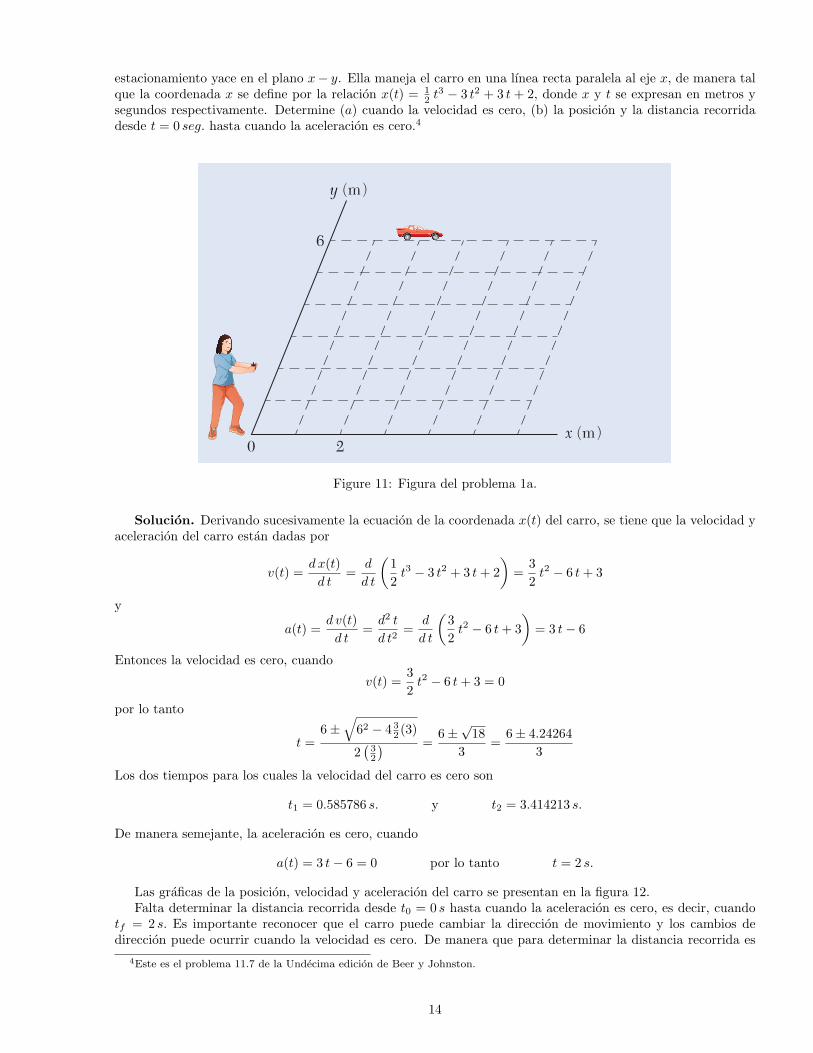
estacionamiento yace en el plano x− y. Ella maneja el carro en una lınea recta paralela al eje x, de manera talque la coordenada x se define por la relacion x(t) = 1
2 t3 − 3 t2 + 3 t + 2, donde x y t se expresan en metros y
segundos respectivamente. Determine (a) cuando la velocidad es cero, (b) la posicion y la distancia recorridadesde t = 0 seg. hasta cuando la aceleracion es cero.4
11.4 A loaded railroad car is rolling at a constant velocity when it couples
with a spring and dashpot bumper system. After the coupling, the
motion of the car is defined by the relation 60 4.8 sin 16t, where
and are expressed in millimeters and seconds, respectively. Deter-
velocity, and the acceleration of the railroad
) 0, ( ) 0.3 s.
Fig. P11.4
11.5 The motion of a particle is defined by the relation 5 2 2 12 1
t 1 3, where and are expressed in meters and seconds,
respectively. Determine the time, the position, and the velocity when
0.
11.6 The motion of a particle is defined by the relation 5 2 1
24 2 expressed in inches and seconds, respec-
tively. Determine ( velocity is zero, (
veled when the acceleration is zero.
11.7 A girl operates a radio-controlled model car in a vacant parking lot.
The girl’s position is at the origin of the xy coordinate axes, and the
surface of the parking lot lies in the plane. She drives the car in a
straight line so that the coordinate is defined by the relation
) 0.5 3 3 2 3 2, where and are expressed in meters
and seconds, respectively. Determine ( ) when the velocity is zero,
) the position and total distance travelled when the acceleration is zero.
Fig. P11.7
0
6
2
y (m)
x (m)
11.8 a particle is defined by the relation 2)
where and are expressed in feet and seconds, respectively.
Determine ( ) the two positions at which the velocity is zero ( ) the
veled by the particle from 0 to 4 s.
bee87342_ch11_615-717.indd 631 12/1/14 3:48 PM
Figure 11: Figura del problema 1a.
Solucion. Derivando sucesivamente la ecuacion de la coordenada x(t) del carro, se tiene que la velocidad yaceleracion del carro estan dadas por
v(t) =d x(t)
d t=
d
d t
(
1
2t3 − 3 t2 + 3 t+ 2
)
=3
2t2 − 6 t+ 3
y
a(t) =d v(t)
d t=
d2 t
d t2=
d
d t
(
3
2t2 − 6 t+ 3
)
= 3 t− 6
Entonces la velocidad es cero, cuando
v(t) =3
2t2 − 6 t+ 3 = 0
por lo tanto
t =6±
√
62 − 4 32 (3)
2(
32
) =6±
√18
3=
6± 4.24264
3
Los dos tiempos para los cuales la velocidad del carro es cero son
t1 = 0.585786 s. y t2 = 3.414213 s.
De manera semejante, la aceleracion es cero, cuando
a(t) = 3 t− 6 = 0 por lo tanto t = 2 s.
Las graficas de la posicion, velocidad y aceleracion del carro se presentan en la figura 12.Falta determinar la distancia recorrida desde t0 = 0 s hasta cuando la aceleracion es cero, es decir, cuando
tf = 2 s. Es importante reconocer que el carro puede cambiar la direccion de movimiento y los cambios dedireccion puede ocurrir cuando la velocidad es cero. De manera que para determinar la distancia recorrida es
4Este es el problema 11.7 de la Undecima edicion de Beer y Johnston.
14
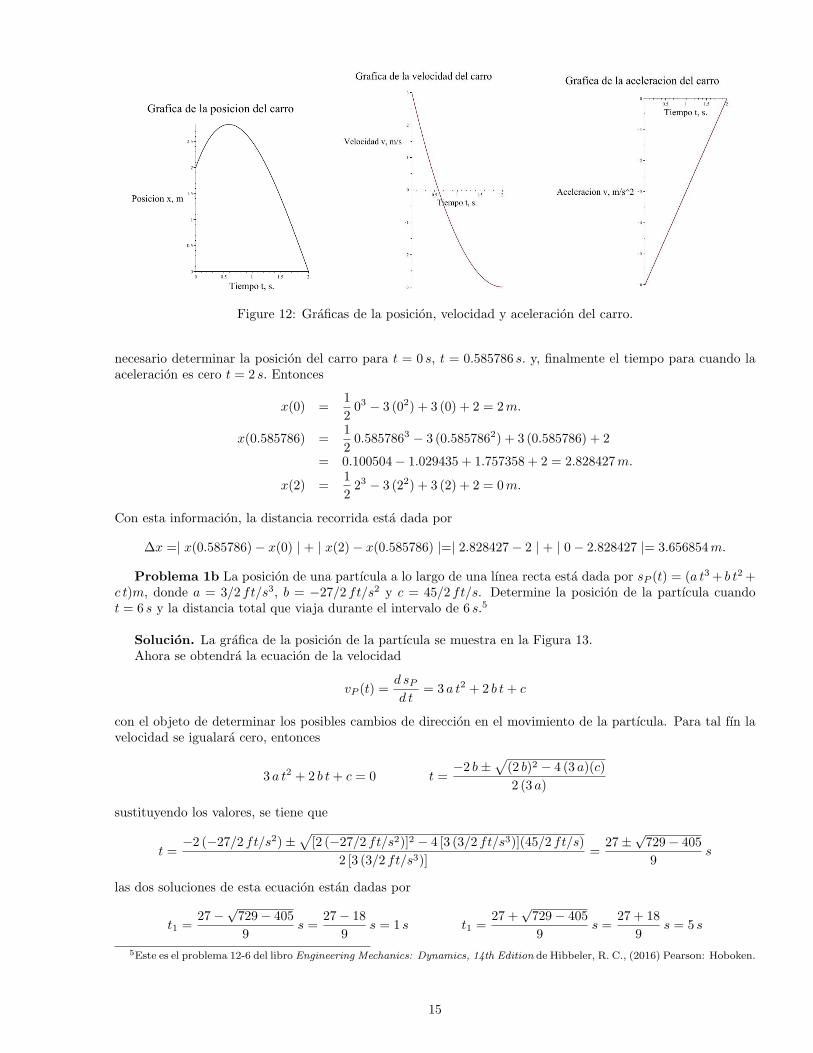
Figure 12: Graficas de la posicion, velocidad y aceleracion del carro.
necesario determinar la posicion del carro para t = 0 s, t = 0.585786 s. y, finalmente el tiempo para cuando laaceleracion es cero t = 2 s. Entonces
x(0) =1
203 − 3 (02) + 3 (0) + 2 = 2m.
x(0.585786) =1
20.5857863 − 3 (0.5857862) + 3 (0.585786) + 2
= 0.100504− 1.029435 + 1.757358 + 2 = 2.828427m.
x(2) =1
223 − 3 (22) + 3 (2) + 2 = 0m.
Con esta informacion, la distancia recorrida esta dada por
∆x =| x(0.585786)− x(0) | + | x(2)− x(0.585786) |=| 2.828427− 2 | + | 0− 2.828427 |= 3.656854m.
Problema 1b La posicion de una partıcula a lo largo de una lınea recta esta dada por sP (t) = (a t3+ b t2+c t)m, donde a = 3/2 ft/s3, b = −27/2 ft/s2 y c = 45/2 ft/s. Determine la posicion de la partıcula cuandot = 6 s y la distancia total que viaja durante el intervalo de 6 s.5
Solucion. La grafica de la posicion de la partıcula se muestra en la Figura 13.Ahora se obtendra la ecuacion de la velocidad
vP (t) =d sPd t
= 3 a t2 + 2 b t+ c
con el objeto de determinar los posibles cambios de direccion en el movimiento de la partıcula. Para tal fın lavelocidad se igualara cero, entonces
3 a t2 + 2 b t+ c = 0 t =−2 b±
√
(2 b)2 − 4 (3 a)(c)
2 (3 a)
sustituyendo los valores, se tiene que
t =−2 (−27/2 ft/s2)±
√
[2 (−27/2 ft/s2)]2 − 4 [3 (3/2 ft/s3)](45/2 ft/s)
2 [3 (3/2 ft/s3)]=
27±√729− 405
9s
las dos soluciones de esta ecuacion estan dadas por
t1 =27−
√729− 405
9s =
27− 18
9s = 1 s t1 =
27 +√729− 405
9s =
27 + 18
9s = 5 s
5Este es el problema 12-6 del libro Engineering Mechanics: Dynamics, 14th Edition de Hibbeler, R. C., (2016) Pearson: Hoboken.
15
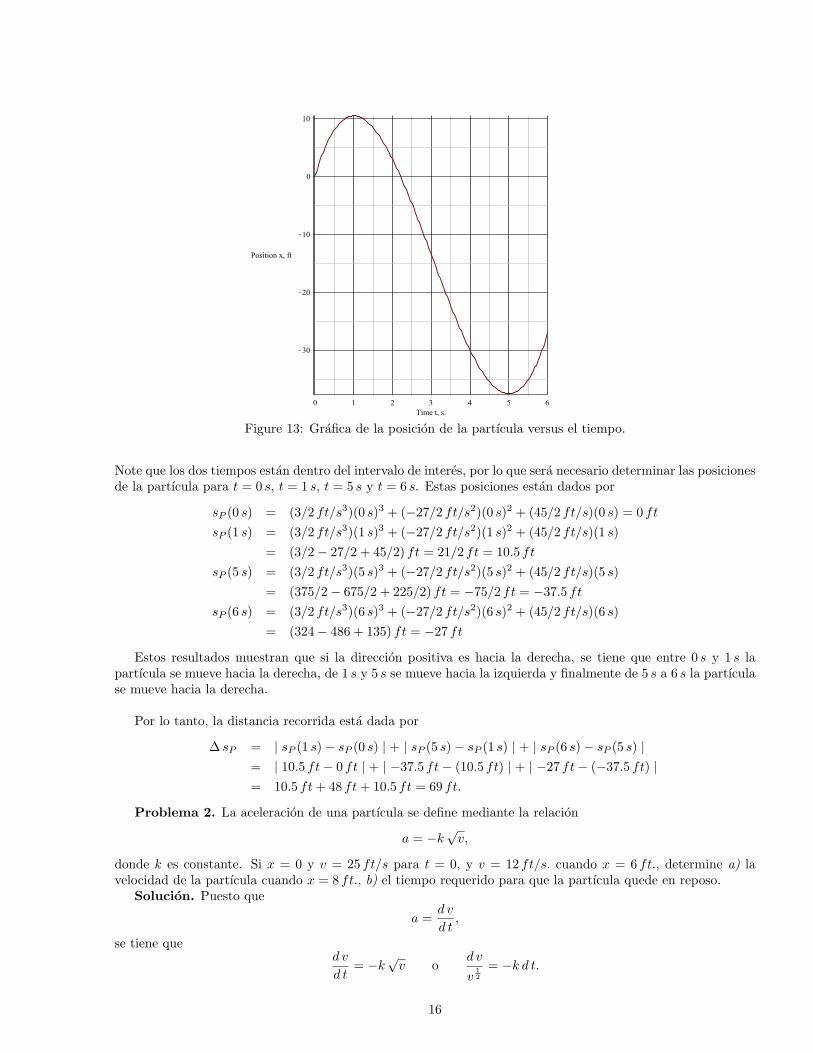
Figure 13: Grafica de la posicion de la partıcula versus el tiempo.
Note que los dos tiempos estan dentro del intervalo de interes, por lo que sera necesario determinar las posicionesde la partıcula para t = 0 s, t = 1 s, t = 5 s y t = 6 s. Estas posiciones estan dados por
sP (0 s) = (3/2 ft/s3)(0 s)3 + (−27/2 ft/s2)(0 s)2 + (45/2 ft/s)(0 s) = 0 ft
sP (1 s) = (3/2 ft/s3)(1 s)3 + (−27/2 ft/s2)(1 s)2 + (45/2 ft/s)(1 s)
= (3/2− 27/2 + 45/2) ft = 21/2 ft = 10.5 ft
sP (5 s) = (3/2 ft/s3)(5 s)3 + (−27/2 ft/s2)(5 s)2 + (45/2 ft/s)(5 s)
= (375/2− 675/2 + 225/2) ft = −75/2 ft = −37.5 ft
sP (6 s) = (3/2 ft/s3)(6 s)3 + (−27/2 ft/s2)(6 s)2 + (45/2 ft/s)(6 s)
= (324− 486 + 135) ft = −27 ft
Estos resultados muestran que si la direccion positiva es hacia la derecha, se tiene que entre 0 s y 1 s lapartıcula se mueve hacia la derecha, de 1 s y 5 s se mueve hacia la izquierda y finalmente de 5 s a 6 s la partıculase mueve hacia la derecha.
Por lo tanto, la distancia recorrida esta dada por
∆ sP = | sP (1 s)− sP (0 s) | + | sP (5 s)− sP (1 s) | + | sP (6 s)− sP (5 s) |= | 10.5 ft− 0 ft | + | −37.5 ft− (10.5 ft) | + | −27 ft− (−37.5 ft) |= 10.5 ft+ 48 ft+ 10.5 ft = 69 ft.
Problema 2. La aceleracion de una partıcula se define mediante la relacion
a = −k√v,
donde k es constante. Si x = 0 y v = 25 ft/s para t = 0, y v = 12 ft/s. cuando x = 6 ft., determine a) lavelocidad de la partıcula cuando x = 8 ft., b) el tiempo requerido para que la partıcula quede en reposo.
Solucion. Puesto que
a =d v
d t,
se tiene qued v
d t= −k
√v o
d v
v1
2
= −k d t.
16

Integrando la ecuacion, se tiene quev−
1
2+1
− 12 + 1
= −k t+ C1 = 2√v
Para determinar la constante de integracion C1, sustituiremos la condicion inicial v = 25 ft/s para t = 0, porlo tanto
−k 0 + C1 = 2√25 = 10, de donde C1 = 10.
La ecuacion de la velocidad resulta6
2√v = −k t+ 10.
Resolviendo para la velocidad, se tiene que
v =1
4k2t2 + 5 k t + 25
Integrando la velocidad con respecto al tiempo, se tiene que
x =1
12k2t3 +
5
2kt2 + 25 t+ C2,
donde C2 es otra constante de integracion, para encontrar los valores de la constante de integracion C2, seempleara la condicion inicial x = 0 para t = 0, por lo tanto
0 =1
12k203 +
5
2k02 + 25 0 + C2, de donde C2 = 0.
y la ecuacion de la posicion, se reduce a
x =1
12k2t3 +
5
2kt2 + 25 t
A fin de encontrar el valor de la constante k, es necesario emplear la condicion frontera v = 12 ft/s. cuandox = 6 ft.. Primero se determinaran los valores del tiempo, para los cuales v = 12 ft/s., estos estan dados porla solucion de la ecuacion
12 =1
4k2t2 + 5 k t + 25 o
1
4k2t2 + 5 k t + 13 = 0.
Los dos posibles soluciones de esta ecuacion son
t1,2 =10± 4
√3
k,
donde la primera solucion emplea el signo positivo y la segunda solucion emplea el signo negativo.
1. Si se sustituye la primera solucion t1 = 10+4√3
k en la ecuacion de la posicion, de manera que x = 6 ft., seobtiene la ecuacion
6 =1
12k2
(
10 + 4√3
k
)3
+5
2k
(
10 + 4√3
k
)2
+ 25
(
10 + 4√3
k
)
simplificando la ecuacion, se obtiene
6 =2
3
−125 + 24√3
k
y la solucion para la constante k resulta ser
k1 = −125
9+
8√3
3
Sustituyendo este valor en las ecuaciones de velocidad y posicion de la partıcula se tiene que
s1(t) =17353
972t3 +
500
81t3√3− 625
18t2 − 20
3t2√3 + 25 t (49)
v1(t) =17353
324t2 +
500
27t2√3− 625
9t− 40
3t√3 + 25 (50)
17

0.0
Velocidad v, ft/s.
0.50
Tiempo t, s.
20
10
1.0
Figure 14: Grafica de la velocidad de la partıcula, primera solucion, respecto al tiempo.
La grafica de la velocidad v1(t), esta dada por la figura 14, a pesar de la cercania de la grafica con el ejehorizontal, puede probarse que la velocidad de la partıcula nunca es 0.
2. Si se sustituye la segunda solucion t2 = 10−4√3
k en la ecuacion de la posicion, de manera que x = 6 ft., seobtiene la ecuacion
6 =1
12k2
(
10− 4√3
k
)3
+5
2k
(
10− 4√3
k
)2
+ 25
(
10− 4√3
k
)
simplificando la ecuacion, se obtiene
6 =2
3
125 + 24√3
k
y la solucion para la constante k resulta ser
k2 =125
9− 8
√3
3
Sustituyendo este valor en las ecuaciones de velocidad y posicion de la partıcula se tiene que
s2(t) =17353
972t3 − 500
81t3√3− 625
18t2 +
20
3t2√3 + 25 t (51)
v2(t) =17353
324t2 − 500
27t2√3− 625
9t+
40
3t√3 + 25 (52)
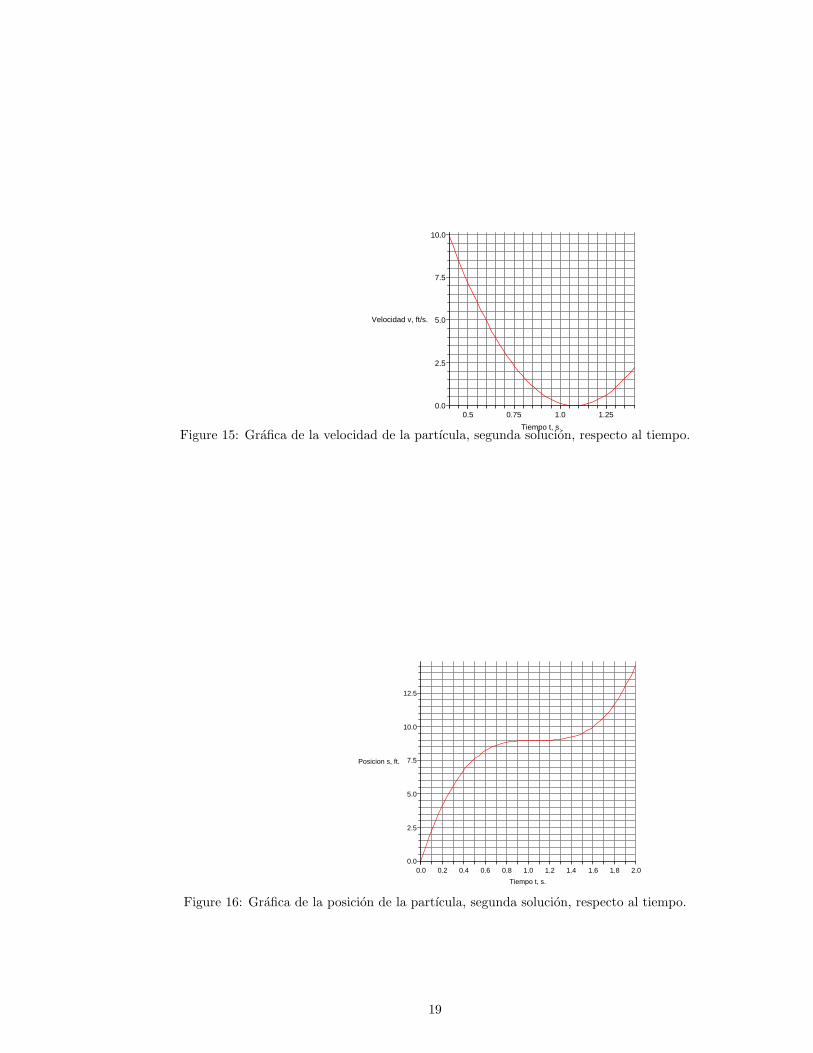
La grafica de la velocidad v2(t), esta dada por la figura 15, en este caso puede probarse que la velocidades igual a 0 para los siguientes valores del tiempo
t1 = 1.078723893 s., t2 = 1.078753224 s. (53)
Puesto que en el primer caso, para el cual k1 = − 1259 + 8
√3
3 la velocidad nunca se hace igual a 0, debeentenderse que la solucion buscada, por el problema, es la segunda. Entonces, ya es posible determinar que lavelocidad se hace igual a 0 para t1 = 1.078723893 s.
6Desde el punto de vista matematico, no hay restriccion alguna respecto a emplear√
25 = −5, sin embargo, aquı se presentariaun problema de interpretacion fısica.
18
0.0
Velocidad v, ft/s.
1.25
10.0
2.5
7.5
5.0
Tiempo t, s.
1.00.5 0.75
Figure 15: Grafica de la velocidad de la partıcula, segunda solucion, respecto al tiempo.
1.4
10.0
5.0
0.00.6
Tiempo t, s.
2.01.81.6
Posicion s, ft.
12.5
7.5
1.2
2.5
0.80.40.0 0.2 1.0
Figure 16: Grafica de la posicion de la partıcula, segunda solucion, respecto al tiempo.
19

La grafica de la posicion s2(t), esta dada por la figura 16.
Finalmente, substituyendo s2(t) = 8 ft. y resolviendo para el tiempo, t, se tiene que
t = 0.5617573873 s., (54)
y por lo tanto
v2
∣
∣
∣
t=0.5617573873 s.= 5.741918929 ft/s. (55)
Problema 2a. Una partıcula se esta moviendo a lo largo de una lınea recta, de tal manera que su acelera-cion esta definida por a = (−2 v)m/s2, donde a esta dada en metros por segundo. Si v = 20m/s cuando s = 0y t = 0, determine la posicion, velocidad y aceleracion como funciones de tiempo.7
Solucion. Para poder usar analisis dimensional, la ecuacon de la aceleracion se escribe como
a = k v donde k = −21
s= −2 s−1
Las condiciones iniciales, son para
t0 = 0 s s(t0) = s0 = 0m v(t0) = v0 = 20m/s
El primer paso es encontrar la ecuacion de la velocidad
a =d v
d t= k v
d v
v= k d t
∫
d v
v=
∫
k d t ln | v |= k t+ C1
Simplificandoeln|v| = ek t+C1 v(t) = ek t eC1 = C2 e
k t
Para determinar, la constante de integracion C2, se empleara la condicion inicial: Para t0 = 0 s v(t0) = v0 =20m/s, por lo tanto
v0 = v(0) = C2 ek 0 = C2 e
0 = C2 por lo tanto C2 = v0
De manera que la ecuacion de la velocidad como funcion del tiempo esta dado por
v(t) = v0 ek t = 20
m
se−2 1
st
Ahora es posible obtener, por simple derivacion la ecuacion de la aceleracion como funcion del tiempo
a(t) =d v(t)
d t=
d
d t
(
v0 ek t)
= v0 k ek t = k v0 e
k t
Sustituyendo los valores numericos se obtiene la ecuacion numerica como
a(t) =
(
−21
s
)
(
20m
s
)
e−2 1
st = −40
m
s2e−2 1
st
Finalmente, la ecuacion de la velocidad debe integrarse respecto al tiempo para obtener la ecuacion de la posicioncomo funcion del tiempo
d s
d t= v(t) = v0 e
k t d s = v0 ek t d t
∫
d s =
∫
v0 ek t d t
Por lo tantos(t) =
v0k
ek t + C3
Para calcular la constante C3, se empleara la condicion inicial t0 = 0 s s(t0) = s0 = 0m. Realizando lasustitucion, se tiene que
s0 = s(0) =v0k
ek 0 + C3 =v0k
+ C3 C3 = s0 −v0k
= −v0k
7Este es el problema 12-23 del libro Engineering Mechanics: Dynamics, 14th Edition de Hibbeler, R. C., (2016) Pearson:Hoboken.
20
De manera que la ecuacion de la posicion de la partıcula como funcion del tiempo esta dada por
s(t) =v0k
ek t − v0k
= −v0k
(
1− ek t)
= −20ms
−2s
(
1− e−2
st)
= 10m(
1− e−2
st)
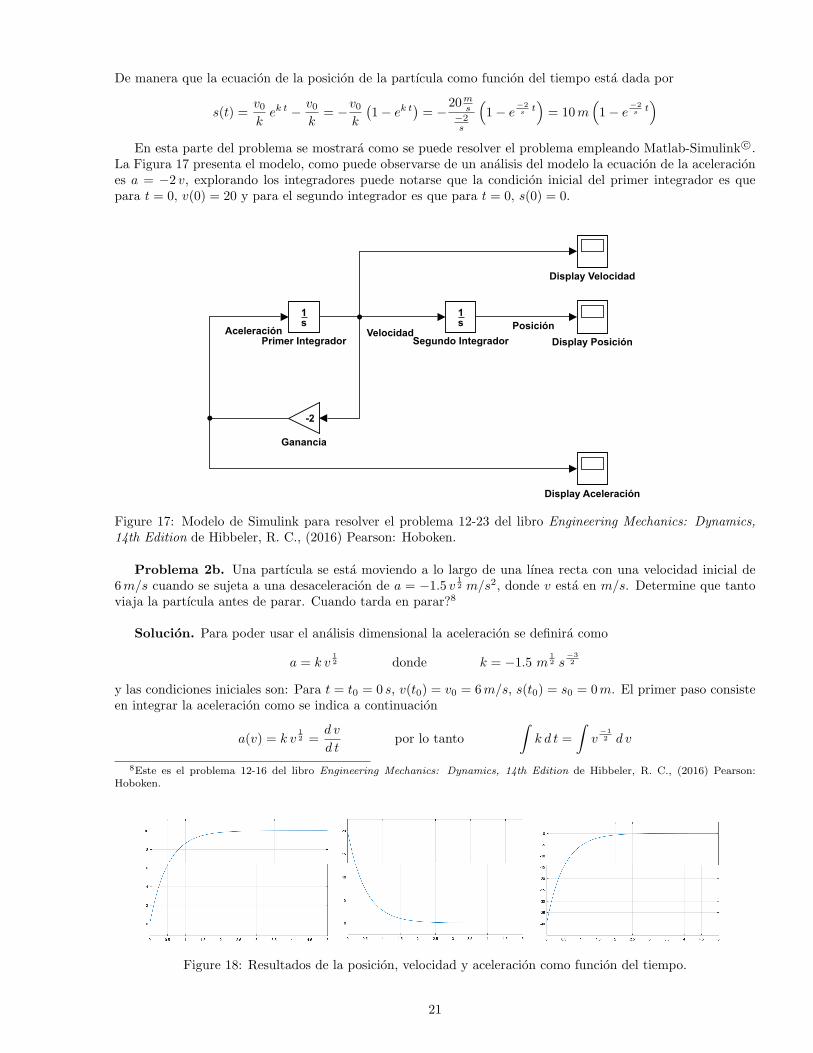
En esta parte del problema se mostrara como se puede resolver el problema empleando Matlab-Simulink c©.La Figura 17 presenta el modelo, como puede observarse de un analisis del modelo la ecuacion de la aceleraciones a = −2 v, explorando los integradores puede notarse que la condicion inicial del primer integrador es quepara t = 0, v(0) = 20 y para el segundo integrador es que para t = 0, s(0) = 0.
Figure 17: Modelo de Simulink para resolver el problema 12-23 del libro Engineering Mechanics: Dynamics,14th Edition de Hibbeler, R. C., (2016) Pearson: Hoboken.
Problema 2b. Una partıcula se esta moviendo a lo largo de una lınea recta con una velocidad inicial de6m/s cuando se sujeta a una desaceleracion de a = −1.5 v
1
2 m/s2, donde v esta en m/s. Determine que tantoviaja la partıcula antes de parar. Cuando tarda en parar?8
Solucion. Para poder usar el analisis dimensional la aceleracion se definira como
a = k v1
2 donde k = −1.5 m1
2 s−3
2
y las condiciones iniciales son: Para t = t0 = 0 s, v(t0) = v0 = 6m/s, s(t0) = s0 = 0m. El primer paso consisteen integrar la aceleracion como se indica a continuacion
a(v) = k v1
2 =d v
d tpor lo tanto
∫
k d t =
∫
v−1
2 d v
8Este es el problema 12-16 del libro Engineering Mechanics: Dynamics, 14th Edition de Hibbeler, R. C., (2016) Pearson:Hoboken.
Figure 18: Resultados de la posicion, velocidad y aceleracion como funcion del tiempo.
21

La integracion conduce a
k t+ C1 =v
−1
2+1
−12 + 1
= 2√v
Sustituyendo la condicion inicial: t = t0 = 0 s, v(t0) = v0 = 6m/s,
k 0 + C1 = 2√v0 por lo tanto C1 = 2
√v0
y la ecuacion de la velocidad como funcion del tiempo es
k t = 2(√
v −√v0)
Con esta ecuacion es posible determinar cuando tarda la partıcula en parar. La pregunta es t =? para v = 0,haciendo la sustitucion, se tiene que
k t = 2 (0−√v0) = −2
√v0 por lo tanto t = −2
√v0
k= − 2
√
6m/s
−1.5 m1
2 s−3
2
= 3.2659 s
Para determinar la distancia recorrida, se debe volver a integrar la ecuacion de la velocidad como funciondel tiempo
v(t) =d s
d t=
(
1
2k t+
√v0
)2
por lo tanto
∫
d s =
∫(
1
2k t+
√v0
)2
d t =2
k
∫(
1
2k t+
√v0
)21
2k d t
La integral resulta
s(t) =2
3 k
(
1
2k t+
√v0
)3
+ C2
Sustituyendo la condicion inicial: t = t0 = 0 s, s(t0) = s0 = 0m, entonces
0 =2
3 k
(
1
2k 0 +
√v0
)3
+ C2 por lo tanto C2 = − 2
3 kv
3
2
0
Finalmente, la ecuacion de la posicion esta dada por
s(t) =2
3 k
[
(
1
2k t+
√v0
)3
− (√v0)
3
]
La cantidad recorrida se resuelve con la siguiente pregunta9. Para t = 3.2659 s, s(3.2659 s) =?
s(t = 3.2659 s) =2
3(
−1.5 m1
2 s−3
2
)
[
(
1
2(−1.5 m
1
2 s−3
2 (3.2659 s)) +(
√
6m/s)
)3
−(
√
6m/s)3]
= 6.5319m.
Este ultimo resultado puede obtenerse de una manera alternativa, recordando que
a = k v1
2 = vd v
d s
Por lo tanto
∫
k d s =
∫
v−1
2 (vd v) =
∫
v1
2 d v Por lo tanto k s =v
1
2+1
12 + 1
+ C3 =2
3v
3
2 + C3
Para encontrar la constante de integracion, sustituya la condicion inicial para v = v0, s(v0) = s0 = 0, por lotanto
k 0 =2
3v
3
2
0 + C3 Por lo tanto C3 = −2
3v
3
2
0
9Note que por las caracterısticas de la aceleracion no hay cambio en la direccion de movimiento.
22
De manera que la ecuacion final resulta
k s =2
3v
3
2 − 2
3v
3
2
0 = −2
3
(
v3
2 − v3
2
0
)
Para resolvern el problema, la pregunta es s =? para v = 0, la ecuacon final es
k s =2
3
(
03
2 − v3
2
0
)
= −2
3v
3
2
0
Por lo tanto
s = − 2
3 kv
3
2
0 = − 2
3 (−1.5 m1
2 s−3
2 )(6m/s)
3
2 = 6.5319m.
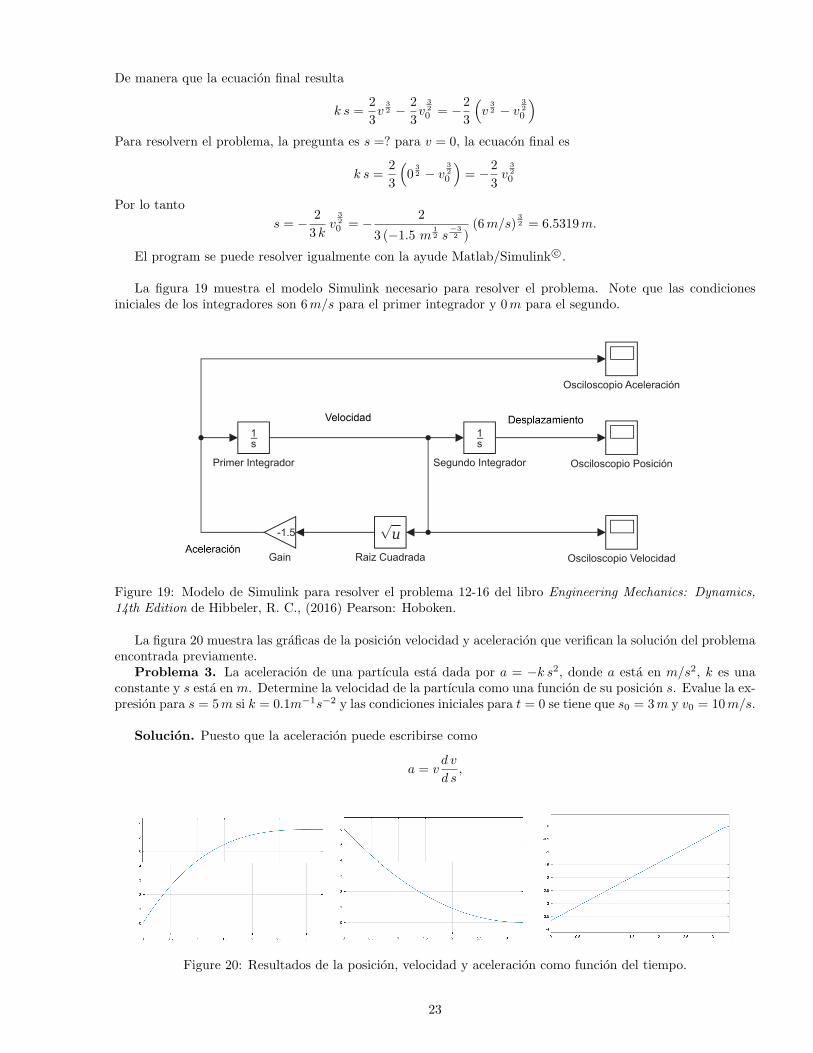
El program se puede resolver igualmente con la ayude Matlab/Simulink c©.
La figura 19 muestra el modelo Simulink necesario para resolver el problema. Note que las condicionesiniciales de los integradores son 6m/s para el primer integrador y 0m para el segundo.
Figure 19: Modelo de Simulink para resolver el problema 12-16 del libro Engineering Mechanics: Dynamics,14th Edition de Hibbeler, R. C., (2016) Pearson: Hoboken.
La figura 20 muestra las graficas de la posicion velocidad y aceleracion que verifican la solucion del problemaencontrada previamente.
Problema 3. La aceleracion de una partıcula esta dada por a = −k s2, donde a esta en m/s2, k es unaconstante y s esta en m. Determine la velocidad de la partıcula como una funcion de su posicion s. Evalue la ex-presion para s = 5m si k = 0.1m−1s−2 y las condiciones iniciales para t = 0 se tiene que s0 = 3m y v0 = 10m/s.
Solucion. Puesto que la aceleracion puede escribirse como
a = vd v
d s,
Figure 20: Resultados de la posicion, velocidad y aceleracion como funcion del tiempo.
23

se tiene que
−k s2 = vd v
d s, o − k s2d s = v d v
Integrando la ecuacion, se tiene que1
2v2 = −1
3k s3 + C1,
donde C1 es una constante de integracion que se determinara empleando las condiciones iniciales s0 = 3m yv0 = 10m/s. La sustitucion de esta condicion inicial conduce a
1
2102 = −1
3k 33 + C1, de donde C1 = 50 + 9 k
de manera que la ecuacion de la velocidad como funcion de la posicion esta dada por
1
2v2 = −1
3k s3 + 50 + 9 k, (56)
Si ademas, se sustituye el valor de k = 110 , se tiene que
1
2v2 = − 1
30s3 + 50 +
9
10= − 1
30s3 +
509
10o v2 = − 1
15s3 +
1018
10
De modo que la ecuacion de la velocidad, en terminos de la posicion, esta dada por
v = ±√
− 1
15s3 +
1018
10. (57)
La grafica de esta funcion cuando se toma el signo positivo, esta dada por la figura 21
9.6
10.0
Posicion s m.
6543210
Velocidad v m/s.
9.8
9.4
Figure 21: Grafica de la velocidad de la partıcula versus la posicion.
En particular, si s = 5m, se tiene que
v = ±9.667816m./s.
Problem 3a. La aceleracion de un cohete despegando hacia arriba esta dada por a = (b1 + b2 s)m/s2,donde b1 = 6m/s2 y b2 = 2
100 s2 donde s esta en metros. Determine el tiempo necesario para que el cohete
24

alcance una altitud de s = 100m. Inicialmente, v = v0 = 0 y s = s0 = 0 cuando t = t0 = 0.10
Solucion. Debe notarse que la aplicacion logica
a(s) =d2 s
d t2= b1 + b2 s
conduce a la solucion de una ecuacion diferencial lineal de segundo orden. Este procedimiento es el que se usaraen el estudio de Vibraciones Mecanicas.
Por el momento, se integrara la ecuacion de la aceleracion empleando la relacion
a(s) = vd v
d s= b1 + b2 s Por lo tanto
∫
v d v =
∫
(b1 + b2 s) d s
La integracion conduce a1
2v2 = b1 s+
1
2b2 s
2 + C1
La condicion inicial es: Para s = 0 se tiene que v = 0. Por lo tanto:
1
202 = b1 0 +
1
2b2 0
2 + C1 De manera que C1 = 0
De manera que la ecuacion de la velocidad, esta dada por
v2 = 2 b1 s+ b2 s2 De manera que v(s) =
d s
d t=√
2 b1 s+ b2 s2
Separando variables, se tiene que11
∫
d t =
∫
d s√b2
√
2 b1b2s+ s2
=1√b2
∫
d s√
2 b1b2s+ s2
=1√b2
∫
d s√
(
s+ b1b2
)2
−(
b1b2
)2
Donde b1b2
= 6m/s2
0.02 1/s2 = 300m. Realizando la integracion se tiene que
t+ C2 =1√b2
ln
∣
∣
∣
∣
∣
∣
(
s+b1b2
)
+
√
(
s+b1b2
)2
−(
b1b2
)2∣
∣
∣
∣
∣
∣
o simplificando la ecuacion
t√
b2 + C3 = t√
b2 + C2
√
b2 = ln
∣
∣
∣
∣
∣
∣
(
s+b1b2
)
+
√
(
s+b1b2
)2
−(
b1b2
)2∣
∣
∣
∣
∣
∣
Eliminando el logaritmo natural, se tiene que
C4 et√b2 = et
√b2+C3 = e
ln
∣
∣
∣
∣
∣
(
s+b1
b2
)
+
√
(
s+b1
b2
)
2
−(
b1
b2
)
2
∣
∣
∣
∣
∣
=
(
s+b1b2
)
+
√
(
s+b1b2
)2
−(
b1b2
)2
Sustituyendo la condicion inicial, para t = t0 = 0 s, s(0) = s0 = 0, se tiene que
C4 = C4 e0√b2 =
(
0 +b1b2
)
+
√
(
0 +b1b2
)2
−(
b1b2
)2
=b1b2
10Este es el problema 12-18 del libro Engineering Mechanics: Dynamics, 14th Edition de Hibbeler, R. C., (2016) Pearson:Hoboken.
11Debe notarse que el integrando del lado derecho de la ecuacion puede simplificarse de la manera mostrada a continuacion
2b1
b2
s+ s2 = s
2 + 2b1
b2
s = s2 + 2
b1
b2
s+
(
b1
b2
)
2
−
(
b1
b2
)
2
=
(
s+b1
b2
)
2
−
(
b1
b2
)
2
.
25
Sustituyendo la condicion inicial, se tiene que
b1b2
et√b2 =
(
s+b1b2
)
+
√
(
s+b1b2
)2
−(
b1b2
)2
Finalmente, se puede contestar la pregunta, para que tiempo t, la altitud del cohete es igual a sf = 100m.Despejando para t la ecuacion anterior, se tiene que
t =1√b2
1s
ln
∣
∣
∣
∣
∣
∣
1b1b2
(
s+b1b2
)
+
√
(
s+b1b2
)2
−(
b1b2
)2
∣
∣
∣
∣
∣
∣
=1√
0.02 1s
ln
∣
∣
∣
∣
1
300m
[
(100m+ 300m) +
√
(100m+ 300m)2 − (300m)
2
]∣
∣
∣
∣
=1√
0.02 1s
(0.795365) = 5.624 s
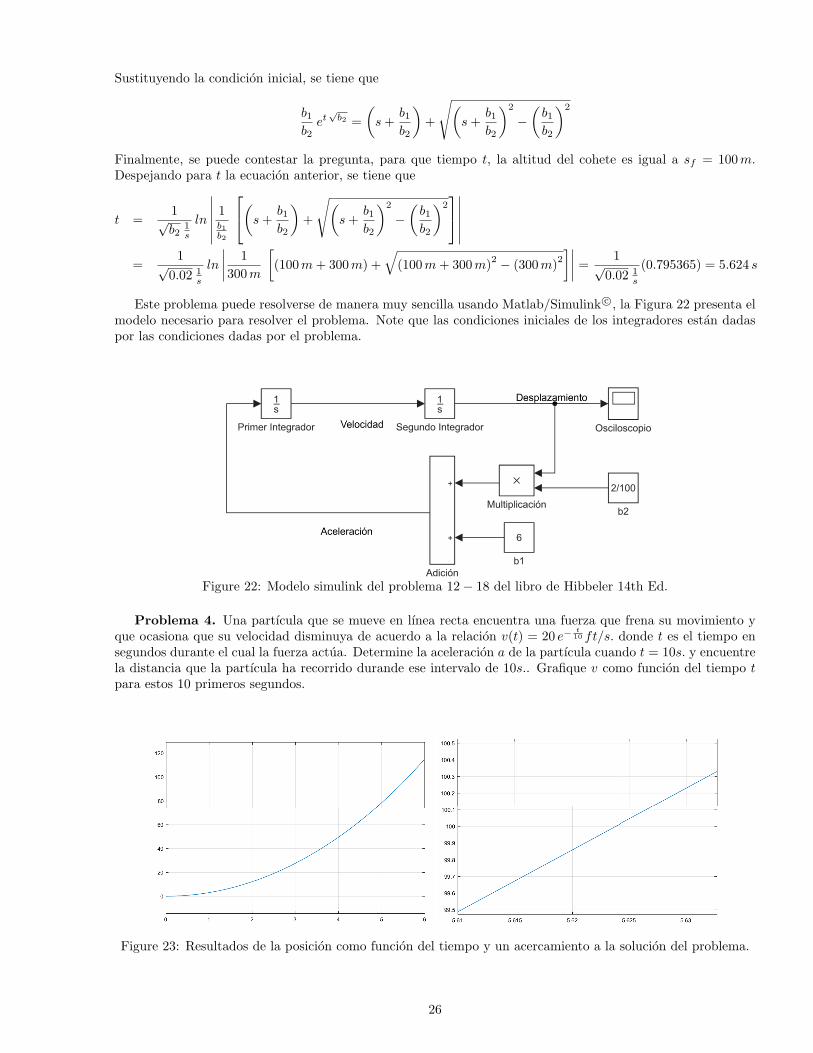
Este problema puede resolverse de manera muy sencilla usando Matlab/Simulink c©, la Figura 22 presenta elmodelo necesario para resolver el problema. Note que las condiciones iniciales de los integradores estan dadaspor las condiciones dadas por el problema.
Figure 22: Modelo simulink del problema 12− 18 del libro de Hibbeler 14th Ed.
Problema 4. Una partıcula que se mueve en lınea recta encuentra una fuerza que frena su movimiento yque ocasiona que su velocidad disminuya de acuerdo a la relacion v(t) = 20 e−
t
10 ft/s. donde t es el tiempo ensegundos durante el cual la fuerza actua. Determine la aceleracion a de la partıcula cuando t = 10s. y encuentrela distancia que la partıcula ha recorrido durande ese intervalo de 10s.. Grafique v como funcion del tiempo tpara estos 10 primeros segundos.
Figure 23: Resultados de la posicion como funcion del tiempo y un acercamiento a la solucion del problema.
26

Velocidad v, ft/s
15
5
10
20
Tiempo t, s.
201050 15Tiempo t, s.
50
2.5 10.07.50
Posicion s, ft.
100
5.00.0
Figure 24: Grafica de la velocidad y posicion de la partıcula versus el tiempo.
Solucion. Para encontrar la ecuacion de la aceleracion, es necesario derivar la ecuacion de la velocidadcomo funcion del tiempo; es decir
a(t) =d v(t)
d t= − d
d t
(
20 e−1
10t)
= 2 e−1
10t
De manera que la aceleracion, para t = 10, esta dada por
a(10) = a(t)∣
∣
∣
t=10= −2 e−
1
1010 = −2 e−1 = −2
e= −0.735758
Finalmente, para determinar la distancia recorrida, se integrara con respecto al tiempo la ecuacion de lavelocidad, bajo las condiciones iniciales, para t = 0, s = 0. Puesto que la velocidad puede escribirse como
v(t) =d s(t)
d t= 20 e−
t
10
entoncesd s = 20 e−
t
10 d t o s(t) = −200 e−1
10t + C1
donde C1 es una constante de integracion que se determina a partir de las condiciones iniciales t = 0, s = 0,por lo que
C1 = 200.
La ecuacion de la posicion de la partıcula esta dada por
s(t) = 200[
1− e−1
10t]
. (58)
Las graficas de la velocidad y posicion de la partıcula como funcion del tiempo, esta dada por la figura 24.
Finalmente, puesto que la posicion de la partıcula es una funcion monotonica creciente, la distancia recorridapor la partıcula, durante los primeros 10 segundos, es igual a la posicion de la misma partıcula para t = 10s.,es decir
∆(s) = s∣
∣
∣
t=10= 200
[
1− e−1
1010]
= 200(
1− e−1)
= 126.424ft.
Problema 5. En una carrera de 400m., un atleta acelera de modo uniforme durante los primeros 130m yluego corre a velocidad constante. Si el tiempo del atleta para los primeros 130m. es de 25 s. determine a) suaceleracion, b) su velocidad final, c) el tiempo en que completa la carrera.
Solucion. Una representacion grafica del problema se muestra en la figura 25, el movimiento sP1(t) es
uniformemente acelerado, mientras que el movimiento sP2(t) es uniforme. La solucion de estos problemas
requiere de
1. Un sentido positivo en la direccion de la lınea recta asociada a la traslacion rectilınea.
2. Un origen del sistema coordenado.
27

Figure 25: Representacion grafica del problema 5.
3. Un origen del tiempo.
Para este problema, el sentido positivo es el mismo de la direccion de movimiento de la carrera12. El origende posicion se selecciona en el punto de partida de la carrera y el origen de tiempo se selecciona cuando elcorredor empieza su movimiento.
Entonces, es posible determinar las dos etapas de movimiento del atleta.
1. Primera etapa. Movimiento uniformemente acelerado.
aP (t) = a.
Condiciones iniciales, para t = 0, vP (0) = 0 y sP (0) = 0. Esta etapa finaliza cuando t = 25 s. ysP (25) = 130m.
2. Segunda etapa. Movimiento uniforme.
vP (t) = v.
Condiciones iniciales, para t = 25 s. y sP (25) = 130m. Esta etapa finaliza cuando sP (t) = 400m.
Entonces, es posible analizar la primera etapa del movimiento. Puesto que
d vP (t)
d t= aP (t) = a, se tiene que
∫
d vP (t) =
∫
a d t,
yvP (t) = a t+ C1,
esta constante de integracion C1, se obtendra a partir de la condicion inicial para t = 0, vP (0) = 0, por lo que
0 = vP (0) = a 0 + C1, por lo tanto C1 = 0.
yvP (t) = a t.
Repitiendo el proceso de integracion, se tiene que
d sP (t)
d t= vP (t) = a t se tiene que
∫
d sP (t) =
∫
a t d t,
y
sP (t) =1
2a t2 + C2,
esta constante de integracion C2, se obtendra a partir de la condicion inicial para t = 0, sP (0) = 0, por lo que
0 = sP (0) =1
2a 02 + C2, por lo tanto C2 = 0.
12Esta seleccion supone implicitamente que la carrera ocurre en lınea recta y no en un ovalo, o bien que el ovalo se ha “convertido”en una lınea recta.
28

y
sP (t) =1
2a t2.
A partir de esta ecuacion, es posible determinar el valor de la aceleracion a partir de la condicion t = 25 s.y sP (25) = 130m., por lo tanto
130m. =1
2a (25 s.)
2por lo tanto a = 0.416m/s2.
Ademas, es posible determinar la velocidad con la que el atleta, finaliza la etapa de movimiento uniforme-mente acelerado, que es la velocidad constante de movimiento uniforme.
vP (25) =(
0.416m
s2
)
(25 s.) = 10.4m/s.
Entonces, es posible analizar la segunda etapa del movimiento del atleta. Como se indico inicialmente, elmovimiento es uniforme; es decir la velocidad es uniforme, y esta dado por
vP (t) = v = 10.4m/s.
Sujeto a las condiciones iniciales, para t = 25 s. y sP (25) = 130m. Integrando la ecuacion, se tiene que
sP (t) = v t+ C3
esta constante de integracion C3, se obtendra a partir de la condicion inicial para t = 25 s., sP (0) = 130m., porlo que
130m. = sP (25) = 10.4m
s25 s.+ C3, por lo tanto C3 = −130m.
y
sP (t) = 10.4m
st− 130m.
La carrera finalizara cuando sP (t) = 400m., por lo tanto, el tiempo del atleta para la distancia de 400m. es de
t =400m.+ 130m.
10.4 ms
= 50.96 s.
Problema 6. Dos automoviles A y B viajan en carriles adyacentes de una carretera y en t = 0 s. tienen lasposiciones y velocidades que indica la figura 26. Si el automovil A tiene una aceleracion constante de 0.6m
s2 yB tiene una desaceleracion constante de 0.4m
s2 , determine a) cuando y donde A alcanzara a B, b) la velocidadde cada automovil en ese momento.
Figure 26: Representacion grafica del problema 6.
Solucion. Los movimientos sA(t) y sB(t) son, ambos, uniformemente acelerados. Nuevamente, la solucionde estos problemas requiere de
1. Un sentido positivo en la direccion de la lınea recta asociada a la traslacion rectilınea.
2. Un origen del sistema coordenado.
3. Un origen del tiempo.
29

Para este problema, el sentido positivo es el mismo de las velocidades iniciales de los automoviles. El origende posicion se selecciona en el posicion inicial del automovil A y el origen de tiempo se selecciona cuando lalocalizacion de los automoviles es la mostrada en la figura 26.
Entonces, es posible determinar las ecuaciones de movimiento de los dos automoviles, ambos movimientosson uniformemente acelerados
1. Automovil AaA(t) = aA = 0.6
m
s2.
Condiciones iniciales, para t = 0, vA(0) = vA0 = 15kmh = 4.16666m
s y sA(0) = 0.
2. Automovil BaB(t) = −0.4
m
s2.
Condiciones iniciales, para t = 0, vB(0) = vB0 = 23kmh = 6.38888m
s y sB(0) = sB0 = 25m..
Entonces, es posible analizar los movimientos de ambos automoviles.
1. Para el automovil A.
d vA(t)
d t= aA(t) = aA se tiene que
∫
d vA(t) =
∫
aA d t,
yvA(t) = aA t+ C1,
esta constante de integracion C1, se obtendra a partir de la condicion inicial para t = 0, vA(0) = vA0, porlo que
vA0 = vA(0) = aA 0 + C1, por lo tanto C1 = vA0.
yvA(t) = aA t+ vA0.
Repitiendo el proceso de integracion, se tiene que
d sA(t)
d t= vA(t) = aA t+ vA0 se tiene que
∫
d sA(t) =
∫
(aA t+ vA0) d t,
y
sA(t) =1
2aA t2 + vA0 t+ C2,
esta constante de integracion C2, se obtendra a partir de la condicion inicial para t = 0, sA(0) = 0, por loque
0 = sA(0) =1
2aA 02 + vA0 0 + C2, por lo tanto C2 = 0.
y
sA(t) =1
2aA t2 + vA0 t.
2. Para el automovil B.
d vB(t)
d t= aB(t) = aB se tiene que
∫
d vB(t) =
∫
aB d t,
yvB(t) = aB t+ C1,
esta constante de integracion C1, se obtendra a partir de la condicion inicial para t = 0, vB(0) = vB0, porlo que
vB0 = vB(0) = aB 0 + C1, por lo tanto C1 = vB0.
yvB(t) = aB t+ vB0.
30

Repitiendo el proceso de integracion, se tiene que
d sB(t)
d t= vB(t) = aB t+ vB0 se tiene que
∫
d sB(t) =
∫
(aB t+ vB0) d t,
y
sB(t) =1
2aB t2 + vB0 t+ C2,
esta constante de integracion C2, se obtendra a partir de la condicion inicial para t = 0, sB(0) = sB0, porlo que
sB0 = sB(0) =1
2aB 02 + vB0 0 + C2, por lo tanto C2 = sB0.
y
sB(t) =1
2aB t2 + vB0 t+ sB0.
El automovil A alcanzara al automovil B, cuando sA(t) = sB(t). Por lo tanto, se debe resolver la ecuacion
1
2aA t2 + vA0 t = sA(t) = sB(t) =
1
2aB t2 + vB0 t+ sB0
o1
2(aA − aB) t
2 + (vA0 − vB0) t− sB0 = 0.
Las raices de esta ecuacion, estan dadas por
t =− (vA0 − vB0)±
√
(vA0 − vB0)2 − 4 1
2 (aA − aB) (−sB0)
2 12 (aA − aB)
=− (vA0 − vB0)±
√
(vA0 − vB0)2+ 2sB0 (aA − aB)
aA − aB
=− (4.16666− 6.38888)±
√
(4.16666− 6.38888)2+ 2 (25) (0.6− (−0.4))
0.6− (−0.4)
= 2.22214±√
−2.222142 + 50 = 2.22214± 7.41201. (59)
Puesto que los movimientos de ambos automoviles se han definido para cuando t ≥ 0, la solucion deseadarequiere el signo positivo y esta dada por
t1 = 9.63415 s.
La posicion en la que el automovil A alcanza al automovil B esta dada por
sA(t = 9.63415 s.) =1
20.6
m
s2(9.63415 s.)2 + 4.16666
m
s9.63415 s. = 67.987m.
donde esta posicion esta medida desde el origen indicado en la figura 26, que, en este caso, coincide con laposicion original del automovil A. Finalmente, las velocidades de los autos en el momento en que el automovilA da alcance al automovil B estan dadas por
vA(t = 9.63415 s.) = 0.6m
s2(9.63415 s.) + 4.16666
m
s= 9.94715
m
s= 35.809
km
h.
y
vB(t = 9.63415 s.) = −0.4m
s2(9.63415 s.) + 6.38888
m
s= 2.53522
m
s= 9.126
km
h.
Es importante notar que este problema puede resolverse, de una manera alternativa, considerando elmovimiento relativo del automovil B cuando se observa desde un sistema de referencia sujeto a traslacioncon el movimiento del automovil A. Las ecuaciones del movimiento relativo del auto B con respecto al sistemade referencia movil, sujeta a traslacion con una velocidad y una aceleracion igual a la del auto A estan dadas,vea seccion 4, por
31

sB/A(t) = sB(t)− sA(t)
vB/A(t) =d sB/A(t)
d t=
d sB(t)
d t− d sA(t)
d t= vB(t)− vA(t)
aB/A(t) =d2 sB/A(t)
d t2=
d2 sB(t)
d t2− d2 sA(t)
d t2=
d vB(t)
d t− d vA(t)
d t= aB(t)− aA(t)
Por lo tanto, las caracterısticas del movimiento del auto B respecto al sistema de referencia movil asociadoal auto A, estan dadas por
aB/A(t) = aB(t)− aA(t) = −0.6m
s2−(
0.4m
s2
)
= −1.0m
s2= aB/A
sujeto a las condiciones iniciales, para t = 0 s.
vB/A(0) = vB(0)− vA(0) = vB0 − vA0 = 6.38888m
s− 4.16666
m
s= 2.22214
m
s= vB/A0.
ysB/A(0) = sB(0)− sA(0) = sB0 − sA0 = 25m.− 0m. = 25m. = sB/A0.
Integrando la ecuacion de la aceleracion del auto B “relativa” al auto A y determinando las constantes deintegracion a partir de las condiciones iniciales, se tiene que
sB/A(t) =1
2aB/A t2 + vB/A0 t+ sB/A0 = −0.5
m
s2t2 + 2.22214
m
st+ 25m (60)
El auto A alcanzara al auto B cuando sB/A(t) = 0. De manera que es necesario resolver la siguiente ecuacioncuadratica
0 = −0.5m
s2t2 + 2.22214
m
st+ 25m
La solucion de la ecuacion esta dada por
t =−2.22214 m
s ±√
(
2.22214 ms
)2 − 4(
−0.5 ms2
)
(25m)
2(
−0.5 ms2
) =(
2.22214m
s± 7.41201
)
s. (61)
De nueva cuenta, puesto que las ecuaciones de movimiento estan definidas para t ≥ 0 s., la unica solucioncon significado fısico es aquella con signo positivo. Por lo tanto
t1 = 9.63415 s.
El mismo resultado obtenido analizando los movimientos de los autos de manera independiente.
Problema 6a. El carro A esta estacionado a lo largo del carril que se dirige hacia el norte de una autopista,y el carro B esta viajando en el carril que se dirige hacia el sur a una rapidez constante de 60mi/h. Para t = 0,el carro A acelera a una tasa constante aA, mientras que para t = 5s., el carro B empieza a disminuir su rapidezcon una desaceleracion constante de aA/6. Sabiendo que los carros se encuentran entre si para x = 294 pies yvA = vB , determine (a) la aceleracion aA, (b) para que tiempo los carros se encuentran, (c) la distancia d entrelos vehıculos para t = 0 .13.
Figure 27: Representacion grafica del problema 6a.
Solucion. Para resolver este problema se estableceran las siguientes condiciones:
13Este es el problema 11.46 del libro Beer, F. P., Johnston, E. R. Jr., Mazurek, D. F., Cornwell, P. J. and Self, B. P. [2019],Vector Mechanics For Engineers, 12th Edition, New York: Mc Graw Hill
32

1. El origen de tiempo, como se indica en el enunciado del problema, ocurrira cuando el carro A emplieza amoverse.
2. El origen de posicion es en la posicon del carro A para t = 0s
3. La direccion positiva es en el dibujo hacia la derecha y corresponde a la direccion Norte de la autopista.
Determinacion de las ecuaciones de movimiento de los carros A y B.
Analisis del movimiento del carro A. Las ecuaciones de la aceleracion y las condiciones iniciales son
aA(t) = −g Para t = 0, vA(0) = 0, sA(0) = 0
Integrando la aceleracion, se tiene que
aA(t) =d vA(t)
d t= aA
∫
d vA(t) =
∫
aA dt vA(t) = aA t+ C1
Sustituyendo la condicion inicial, para t = 0, vA(0) = 0, se tiene que
0 = aA 0 + C1 ⇒ C1 = 0 por lo tanto C1 = 0.
Por lo tantovA(t) = aA t
Integrando la velocidad, se tiene que
vA(t) =d sA(t)
d t= aA t
∫
d sA(t) =
∫
aA tdt sA(t) =1
2aA t2 + C2
Sustituyendo la condicion inicial, para t = 0, sA(0) = 0, se tiene que
0 =1
2aA (0)2 + C2 ⇒ C2 = 0 por lo tanto C2 = 0.
Por lo tanto
sA(t) =1
2aA t2
Analisis del movimiento del carro B. En este caso, se deben considerar dos posibles intervalos de tiempo:
1. Para 5 s > t > 0 s, se tiene que las ecuaciones de la aceleracion y las condiciones iniciales son
aB1(t) = 0 vB1(t) = vB0 = −60mph = −88p/s. Para t = 0, sB1(0) = d,
Integrando la velocidad, se tiene que
vB1(t) =d sB1(t)
d t= vB0
∫
d sB1(t) =
∫
vB0 tdt sB1(t) = vB0 t+ C3
Sustituyendo la condicion inicial, para t = 0, sB1(0) = d, se tiene que
d = vB0 0 + C3 ⇒ C3 = d
Por lo tantosB1(t) = vB0 t+ d
Para poder integrar la segunda parte de las ecuaciones de movimiento es necesario determinar la posicion delcarro B despues de t∗ = 5 s, entonces se tiene que
sB1(t∗) = vB0 t
∗ + d
2. Para t > t∗ = 5 s, se tiene que las ecuaciones de la aceleracion y las condiciones iniciales son
aB2(t) =aA6
vB2(t∗) = vB0 = −60mph = −88p/s. Para t = t∗, sB2(t
∗) = vB0 t+ d,
33

Es importante senalar que puesto que la velovidad del carro B es negativa, la desaceleracion es positiva.Integrando la aceleracion, se tiene que
aB2(t) =d vB2(t)
d t=
aA6
∫
d vB2(t) =
∫
aA6
dt vB2(t) =aA6
t+ C4
Sustituyendo la condicion inicial, para t = t∗, vB2(0) = vB0, se tiene que
vB0 =aA6
t∗ + C4 ⇒ C4 = vB0 −aA6
t∗
Por lo tantovB2(t) =
aA6
t+ vB0 −aA6
t∗ = vB0 +aA6(t− t∗)
Integrando con respecto al tiempo, se tiene que
vB2(t) =d sB2(t)
d t= vB0+
aA6(t−t∗)
∫
d sB2(t) =
∫
vB0+aA6(t−t∗)dt sB2(t) = vB0 t+
aA12
(t−t∗)2+C5
Sustituyendo la condicion inicial, para t = t∗, sB2(t∗) = vB0 t
∗ + d, se tiene que
vB0 t∗ + d = vB0 t
∗ +aA12
(t∗ − t∗)2 + C5 ⇒ C5 = d
Por lo tantosB2(t) =
aA12
(t− t∗)2 + vB0 t+ d
Analisis de si el encuentro entre los carros A y B ocurre durante los primeros 5 s. Sea 5 s > te > 0 s eltiempo para el cual ocurre el encuentro entre los carros, entonces, para el carro A
sA(te) =1
2aA t2e = x aA t2e = 2x
Ademas, las rapideces deben ser iguales, note que los sentidos son diferentes, por lo tanto la ecuacion debeescribirse como
vA(te) = −vB(te) vA(te) = aA te = −vB0 = −vB(te) ⇒ vB0 = −aA te
Resolviendo aA de la ultima ecuacion y sustituyendo este resultado en la ecuacion previa, se tiene que
aA = −vB0
te− vB0
tet2e = 2x
Therefore
te = − 2x
vB0= −2(294 p)
−88 p/s= 6.6818 s.
Puesto que este tiempo es mayor que 5 s se comprueba que el encuentro no ocurre entre los primeros 5 segundos.El analisis debe repetirse para las ecuaciones del carro B que se obtuvieron para t > 5 s.
Analisis de si el encuentro entre los carros A y B ocurre despues de los primeros 5 s. Sea te > 5 s el tiempopara el cual ocurre el encuentro entre los carros, entonces, para el carro A
sA(te) =1
2aA t2e = x aA t2e = 2x aA =
2x
t2e
Ademas, las rapideces deben ser iguales, note que los sentidos son diferentes, por lo tanto la ecuacion debeescribirse como
−vA(te) = vB(te) − vA(te) = −aA te = vB0 +aA6(te − t∗) = vB(te)
La ecuacion se reduce a
7
6aA te −
1
6aA t∗ + vB0 = 0 7 aA te − aA t∗ + 6 vB0 = 0
34

Resolviendo aA de la primera ecuacion y sustituyendo el resultado en la segunda ecuacion, entonces
72x
t2ete −
2x
t2et∗ + 6 vB0 = 0 6 vB0 t
2e + 14x te − 2x t∗ = 0 3 vB0 t
2e + 7x te − x t∗ = 0
La solucion de la ecuacion cuadratica esta dado por
te =−7x±
√
49x2 − 4(3 vB0)(−x t∗)
6 vB0=
−7x±√49x2 + 12 vB0 x t∗
6 vB0
Sustituyendo los valores numericos, se tiene que
te =−7 (294 p)±
√
49 (294 p)2 + 12 (−88p/s)(294 p)(5 s)
6 (−88p/s)=
−2058 ±√4235364− 1552320
−528s
Los dos posibles resultados son
te− =−2058 + 1638
−528s = 0.7954 s te+ =
−2058− 1638
−528s = 7 s
Puesto que el primer valor es menor a 5 s no es valido y el resultado correcto es te = 7 s. Empleando esteresultado para determinar la aceleracion, se tiene que
aA =2x
t2e=
2 (294 p)
(7 s)2= 12 p/s2.
Finalmente para determinar la distancia inicial d, determine la posicion del carro B para te = 7 s, que ya sesabe que es x. Entonces se tiene que
x = sB2(te) =aA12
(te − t∗)2 + vB0 te + d
De aquı que
d = x− vB0 te −aA12
(te − t∗)2 = 294 p− (−88p/s)(7 s)− 12 p/s2
12(7− 5)s2 = (294 + 616− 4) p = 906 p.
Con este resultado finaliza el problema.
Problema 7. Los collarines A y B, mostrados en la figura 28, inician su movimiento desde el reposo y semueven con las siguientes aceleraciones aA = 2.5 t in/s2 hacia arriba y aB = 15 in/s2 hacia abajo. Determinea) el tiempo en que la velocidad del bloque C es de nuevo igual a cero, b) la distancia que se habra movido elbloque C durante ese tiempo.14.
Solucion. Para resolver el problema haremos las siguientes selecciones:
1. Origen de posicion, la interseccion del eje de la guıa del colların A con la lınea fija que, en instante ilustradoen la figura 28, coincide con la parte superior del colların A
2. Direccion positiva, como se indica en la figura 28.
3. Origen de tiempo, cuando ambos collarines inician su movimiento.15
Por otro lado, la ecuacion de la longitud de la cuerda esta dada por
L = sA/B + sA/C + 2 sB/C + C = (sA − sB) + (sA − sC) + 2 (sB − sC) + C = 2 sA + sB − 3 sC + C, (62)
donde C es la constante que incluye aquellas partes de la cuerda enrollada en las poleas o longitudes constantesde los collarines. Derivando la ecuacion (62), se tiene que
0 = 2 vA + vB − 3 vC 0 = 2 aA + aB − 3 aC . (63)
14Este es el problema 11.60 del libro Beer, F. P., Johnston, E. R. Jr. y Clausen, W. E. [2007], Mecanica Vectorial paraIngenieros: Dinamica, Ciudad de Mexico: Mc Graw Hill
15Es importante notar que el autor no indica explıcitamente que ambos collarines inician su movimiento simultaneamente.
35
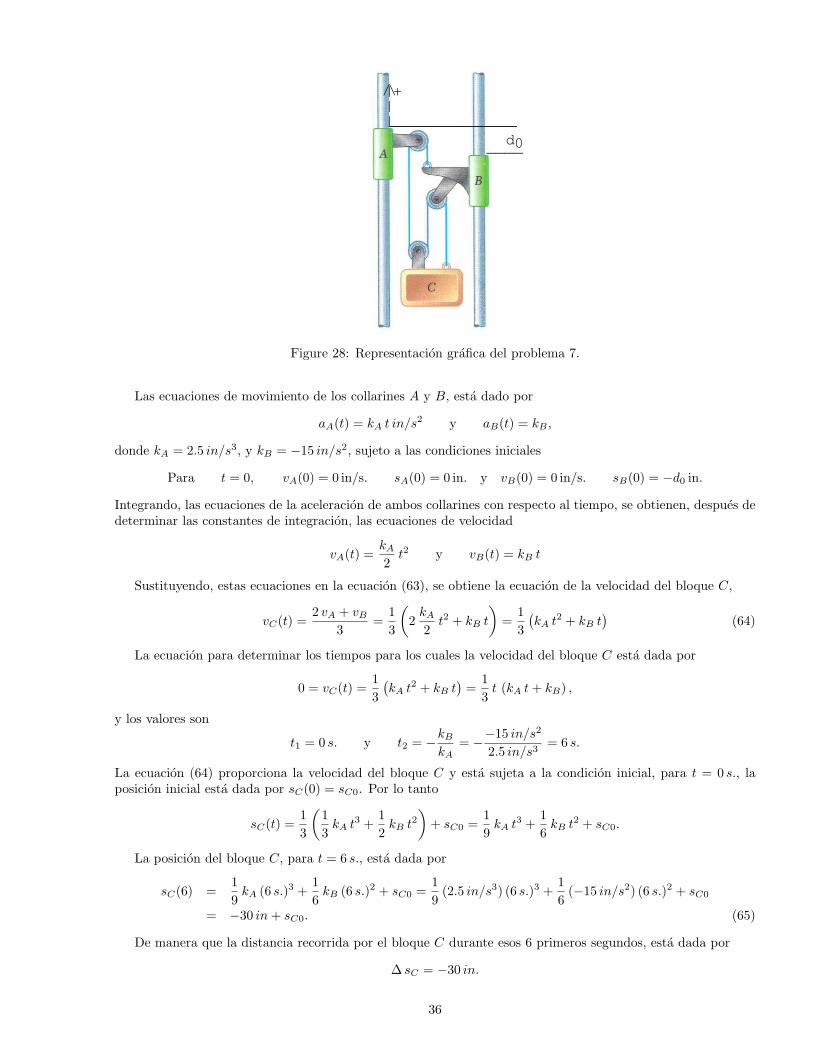
+
d0____
______________||
\/|
Figure 28: Representacion grafica del problema 7.
Las ecuaciones de movimiento de los collarines A y B, esta dado por
aA(t) = kA t in/s2 y aB(t) = kB ,
donde kA = 2.5 in/s3, y kB = −15 in/s2, sujeto a las condiciones iniciales
Para t = 0, vA(0) = 0 in/s. sA(0) = 0 in. y vB(0) = 0 in/s. sB(0) = −d0 in.
Integrando, las ecuaciones de la aceleracion de ambos collarines con respecto al tiempo, se obtienen, despues dedeterminar las constantes de integracion, las ecuaciones de velocidad
vA(t) =kA2
t2 y vB(t) = kB t
Sustituyendo, estas ecuaciones en la ecuacion (63), se obtiene la ecuacion de la velocidad del bloque C,
vC(t) =2 vA + vB
3=
1
3
(
2kA2
t2 + kB t
)
=1
3
(
kA t2 + kB t)
(64)
La ecuacion para determinar los tiempos para los cuales la velocidad del bloque C esta dada por
0 = vC(t) =1
3
(
kA t2 + kB t)
=1
3t (kA t+ kB) ,
y los valores son
t1 = 0 s. y t2 = −kBkA
= −−15 in/s2
2.5 in/s3= 6 s.
La ecuacion (64) proporciona la velocidad del bloque C y esta sujeta a la condicion inicial, para t = 0 s., laposicion inicial esta dada por sC(0) = sC0. Por lo tanto
sC(t) =1
3
(
1
3kA t3 +
1
2kB t2
)
+ sC0 =1
9kA t3 +
1
6kB t2 + sC0.
La posicion del bloque C, para t = 6 s., esta dada por
sC(6) =1
9kA (6 s.)3 +
1
6kB (6 s.)2 + sC0 =
1
9(2.5 in/s3) (6 s.)3 +
1
6(−15 in/s2) (6 s.)2 + sC0
= −30 in+ sC0. (65)
De manera que la distancia recorrida por el bloque C durante esos 6 primeros segundos, esta dada por
∆ sC = −30 in.
36
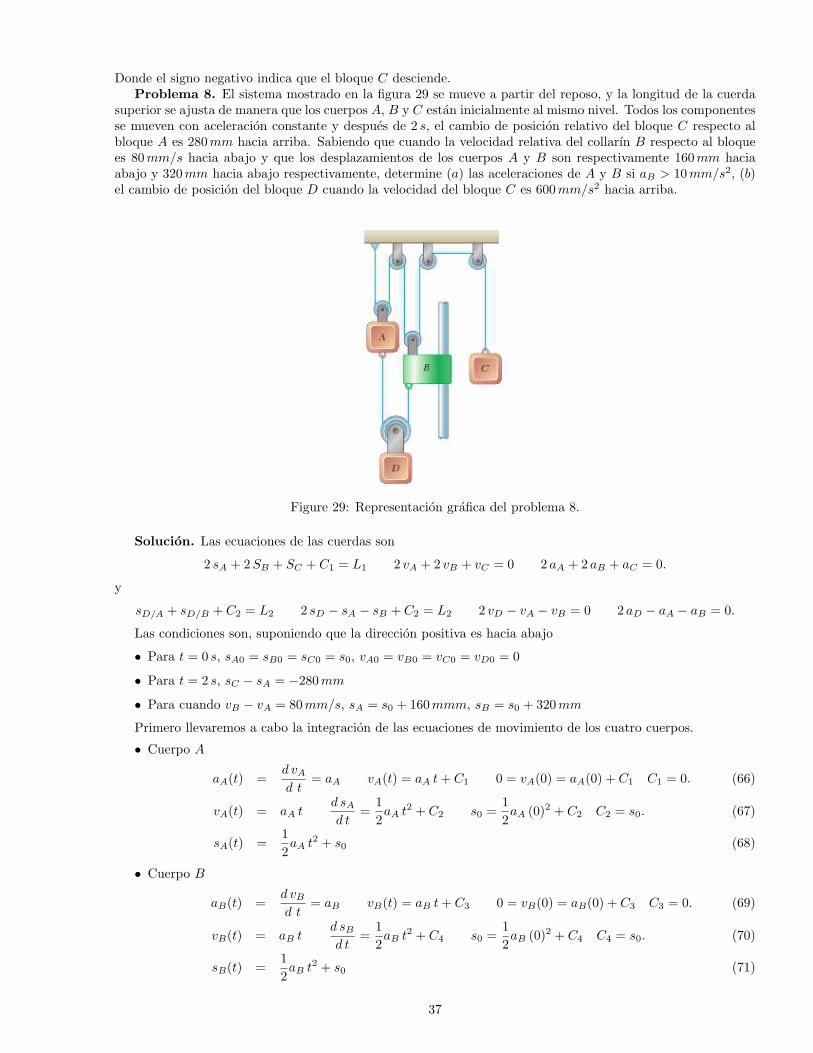
Donde el signo negativo indica que el bloque C desciende.Problema 8. El sistema mostrado en la figura 29 se mueve a partir del reposo, y la longitud de la cuerda
superior se ajusta de manera que los cuerpos A, B y C estan inicialmente al mismo nivel. Todos los componentesse mueven con aceleracion constante y despues de 2 s, el cambio de posicion relativo del bloque C respecto albloque A es 280mm hacia arriba. Sabiendo que cuando la velocidad relativa del colların B respecto al bloquees 80mm/s hacia abajo y que los desplazamientos de los cuerpos A y B son respectivamente 160mm haciaabajo y 320mm hacia abajo respectivamente, determine (a) las aceleraciones de A y B si aB > 10mm/s2, (b)el cambio de posicion del bloque D cuando la velocidad del bloque C es 600mm/s2 hacia arriba.
Figure 29: Representacion grafica del problema 8.
Solucion. Las ecuaciones de las cuerdas son
2 sA + 2SB + SC + C1 = L1 2 vA + 2 vB + vC = 0 2 aA + 2 aB + aC = 0.
y
sD/A + sD/B + C2 = L2 2 sD − sA − sB + C2 = L2 2 vD − vA − vB = 0 2 aD − aA − aB = 0.
Las condiciones son, suponiendo que la direccion positiva es hacia abajo
• Para t = 0 s, sA0 = sB0 = sC0 = s0, vA0 = vB0 = vC0 = vD0 = 0
• Para t = 2 s, sC − sA = −280mm
• Para cuando vB − vA = 80mm/s, sA = s0 + 160mmm, sB = s0 + 320mm
Primero llevaremos a cabo la integracion de las ecuaciones de movimiento de los cuatro cuerpos.
• Cuerpo A
aA(t) =d vAd t
= aA vA(t) = aA t+ C1 0 = vA(0) = aA(0) + C1 C1 = 0. (66)
vA(t) = aA td sAd t
=1
2aA t2 + C2 s0 =
1
2aA (0)2 + C2 C2 = s0. (67)
sA(t) =1
2aA t2 + s0 (68)
• Cuerpo B
aB(t) =d vBd t
= aB vB(t) = aB t+ C3 0 = vB(0) = aB(0) + C3 C3 = 0. (69)
vB(t) = aB td sBd t
=1
2aB t2 + C4 s0 =
1
2aB (0)2 + C4 C4 = s0. (70)
sB(t) =1
2aB t2 + s0 (71)
37

• Cuerpo C
aC(t) =d vCd t
= aC vC(t) = aC t+ C5 0 = vC(0) = aC(0) + C5 C5 = 0. (72)
vC(t) = aC td sCd t
=1
2aC t2 + C6 s0 =
1
2aC (0)2 + C6 C6 = s0. (73)
sC(t) =1
2aC t2 + s0 (74)
Ahora si podemos formular las condiciones impuestas por el enunciado del problema
• Para t = 2 s, sC − sA = −280mm
−280mm = sC(2)− sA(2) =
[
1
2aC (2 s)2 + s0
]
−[
1
2aA (2 s)2 + s0
]
= 2 s2 (aC − aA) (75)
Por lo tantoaC − aA = −140mm/s2 (76)
• Para cuando vB − vA = 80mm/s, sA = s0 + 160mmm. Note que esta condicion implica que aA > 0
80mm/s = vB − vA = aB t− aA t = (aB − aA) t s0 + 160mm =1
2aA t2 + s0 aA t2 = 320mm. (77)
• Para cuando vB − vA = 80mm/s, sB = s0 + 320mm. Note que esta condicion implica que aB > 0
80mm/s = vB − vA = aB t− aA t = (aB − aA) t s0 + 320mm =1
2aB t2 + s0 aB t2 = 640mm. (78)
De las dos ecuaciones de posicion de A y B se tiene que
(aB − aA) t2 = 640mm− 320mm = 320mm. (79)
Por otro lado se sabe que
t =80mm/s
aB − aA(80)
Sustituyendo la ecuacion del tiempo en la primera ecuacion se tiene que
(aB − aA)
[
80mm/s
aB − aA
]2
= 320mm6400mm2/s2
aB − aA= 320mm aB − aA = 20mm/s2 (81)
Las ecuaciones que es necesario resolver son
2 aA + 2 aB + aC = 0
2 aD − aA − aB = 0
aC − aA = −140mm/s2
aB − aA = 20mm/s2
De estas ecuaciones se tiene que
aC = aA − 140mm/s2 aB = aA + 20mm/s2
sustituyendo en la primera ecuacion del conjunto anterior se tiene que
2 aA + 2(
aA + 20mm/s2)
+ aA − 140mm/s2 = 0 5 aA = 100mm/s2 aA = 20mm/s2
Por lo tanto
aB = 40mm/s2 aC = −120mm/s2 aD =aA + aB
2=
20mm/s2 + 40mm/s2
2= 30mm/s2
38

Figure 30: Representacion grafica del problema 2/218.
Problema 9. Las dos correderas pequenas A y B estan conectadas por una barra rıgida y delgada. Sila velocidad de la corredera B es de 2m/s a la derecha, determine la velocidad de la corredera A, cuando elsistema esta en la posicion mostrada en la figura 30.16
Solucion. Se iniciara determinando los vectores de posicion de los puntos A y B respecto del punto O, parael punto A se tiene que
~rA/O = xA i+ yAj
Para el vector de posicion del punto B,~rB/O = xB i−Rj
Por lo tanto, el vector de posicion de B respecto de A esta dado por
~rB/A = ~rB/O − ~rA/O =(
xB i−Rj)
−(
xA i+ yAj)
= (xB − xA) i+ (−R − yA) j
Sin embargo, las partıculas A y B estan rıgidamente unidas mediante la barra, por lo tanto
(2R)2 =| ~rB/A |2= (xB − xA)2+ (−R − yA)
2
Derivando esta condicion de rıgidez respecto al tiempo, se obtiene una relacion entre las componentes de lavelocidad de los puntos A y B, de manera que
0 =d (2R)2
d t= 2 (xB − xA)
(
d xB
d t− d xA
d t
)
+ 2 (−R − yA)
(
−d yAd t
)
Esta es una primera relacion entre las componentes de la velocidad de los puntos A y B. Sin embargo, esposible encontrar otra relacion entre las componentes de la velocidad del punto A, a partir del hecho de que lavelocidad del punto A es tangente a su trayectoria, por lo tanto es necesario calcular la distancia vertical AQ,que esta dada por
AQ = R−Rcos θ = R (1− cos θ)
Por lo tanto, la distancia horizontal QB, del triangulo rectangulo AQB esta dado por
QB =
√
(2R)2 − (R (1− cos θ))2= R
√
4− (1− cos θ)2
16Este es el problema 2/218 del libro Meriam, J. L. and Kraige, L. G. Jr. [2015], Engineering Mechanics: Dynamics 8th.Edition, New York: John Wiley and Sons.
39