
Introducció a la pneumàtica i automatització
44
Treball de R Introducció automatitza 12/01/2010 Integrants del grup: Laura Classe: 2 Batxillerat Tecno Professor del treball: Fern Professor de la UPC: Jose Recerca: ó a la pneumàtica i ació. a Almirall Ribas i Jenni Sànchez Selga ològic Treball de Recerca 2009-2010 nando Hernandez ep Lluís Medina i
-
Upload
institut-torre-del-palau -
Category
Documents
-
view
224 -
download
3
description
Treball de recerca de Laura Almirall i Jenni Sánchez Selga
Transcript of Introducció a la pneumàtica i automatització

Treball de Recerca: Introducció a la pautomatització.
12/01/2010
Integrants del grup: Laura Almirall Ribas i Jenni Sànchez Selga
Classe: 2 Batxillerat Tecnològic Treball de Recerca 2009
Professor del treball: Fernando Hernandez
Professor de la UPC: Josep Lluís Medina
Treball de Recerca: Introducció a la pneumàtica i automatització.
Integrants del grup: Laura Almirall Ribas i Jenni Sànchez Selga
Classe: 2 Batxillerat Tecnològic Treball de Recerca 2009-2010
Professor del treball: Fernando Hernandez
: Josep Lluís Medina
i
2010
Professor del treball: Fernando Hernandez

Pàgs.
1.- Introducció……………………………………………………………………1-2
2.- Introducció a la pneumàtica.…………………………………………....3-7
2.1.- Avantatges i inconvenients
2.1.1.- Avantatges
2.1.2.- Inconvenients
2.2.- Simbologia
2.2.1.- General
2.2.2.- Actuadors
2.2.3.- Vàlvules distribuïdores
2.2.4.- Accionaments
2.3.- Elements pneumàtics
2.3.1.- Cilindres
2.3.1.1.- Cilindres de Simple Efecte
2.3.1.2.- Cilindres de Doble Efecte
2.4.- Vàlvules
3.- Descripció de la instal�lació.…………………………………………….8-17
3.2.- Descripció i característiques del hardware de la instal�lació
3.2.1.- Elements d’entrada
3.2.2.- Elements de sortida
3.3.- Descripció del PLC
4.- Esquemes de connexió.………………………………………………………18
5.- Introducció a la programació en LADDER.…………………..………..19-23
5.1.- Estructura i variables d’un programa amb LADDER
5.1.1.- Estructura del programa
5.1.2.-Variables
5.1.3.- Contactes
5.1.4.- Bobines

6.- Descripció seqüencial d’un procés: GRAFCET.………………………24-27
6.1.- Metodologia pel pas d’un GRAFCET a un LADDER
7.- Descripció de l’entorn de programació de UNITYPRO.…………….28-36
7.1.- Configuració
7.2.- Simulació
7.3.- Transferència i depuració
8.- Exemples d’aplicació d’automatització..……………………………..37-38
9.- Conclusions.…………………………………………………………………39
10.- Bibliografia.…………………………………………………………………40
11.- Agraïments………………………………………………………………….41

Introducció a la pneumàtica i a la automatització.
1
2010
1.- Introducció.
El nostre treball tracta sobre la pneumàtica i els processos automàtics. Per treballar-ho hem hagut d’aprendre tots els conceptes des del principi: en què consisteix la pneumàtica, conèixer els diferents components dels sistemes automàtics, programar amb LADDER... Vam decidir fer aquest treball gràcies a un dels nostres professors del departament de tecnologia ja que totes les nostres propostes no eren gaire específiques. Ens van donar l’oportunitat d’agafar aquest treball de recerca que ens proporcionava la Universitat Politècnica de Catalunya (UPC) i vam accedir a fer-lo. Ens va cridar l’atenció que un professor de la universitat ens ajudés a realitzar aquesta feina i a ensenyar-nos tot el que calgués per fer el treball. També vam veure que el tema de la pneumàtica i els processos automàtics no l’havíem donat mai i per això ens va semblar interessant per tenir uns nous coneixements. Prèviament, abans de començar el treball, vam anar a les primeres sessions a la UPC on ens van donar una introducció dels conceptes més importants del que anàvem a treballar.
- Ens van presentar els diferents llenguatges amb els que podem treballar i programar i com traduïm els components per poder programar:
• ST – Llenguatge estructurat • IL – Llista d’instruccions • FBD – Blocs • SFC – Grafcet • LD – Ladder (1r llenguatge de programació)
� Entrades: % I x,y,z � Sortides: % Q x,y,z � Marques: % M i
X = Bastidor = 0 Y = Posició del mòdul en el bastidor. %I0.2.Z / %Q0.3.Z Z = Canal d’entrada o de sortida (0-15). %I0.2.0 / %Q0.3.4
- Ens van ensenyar a transferir el que programem amb el Unity Pro al PLC. - Ens van ajudar a transferir el que programàvem a la maqueta de la
ventosa.
Introducció a la pneumàtica i a la automatització.
2
2010
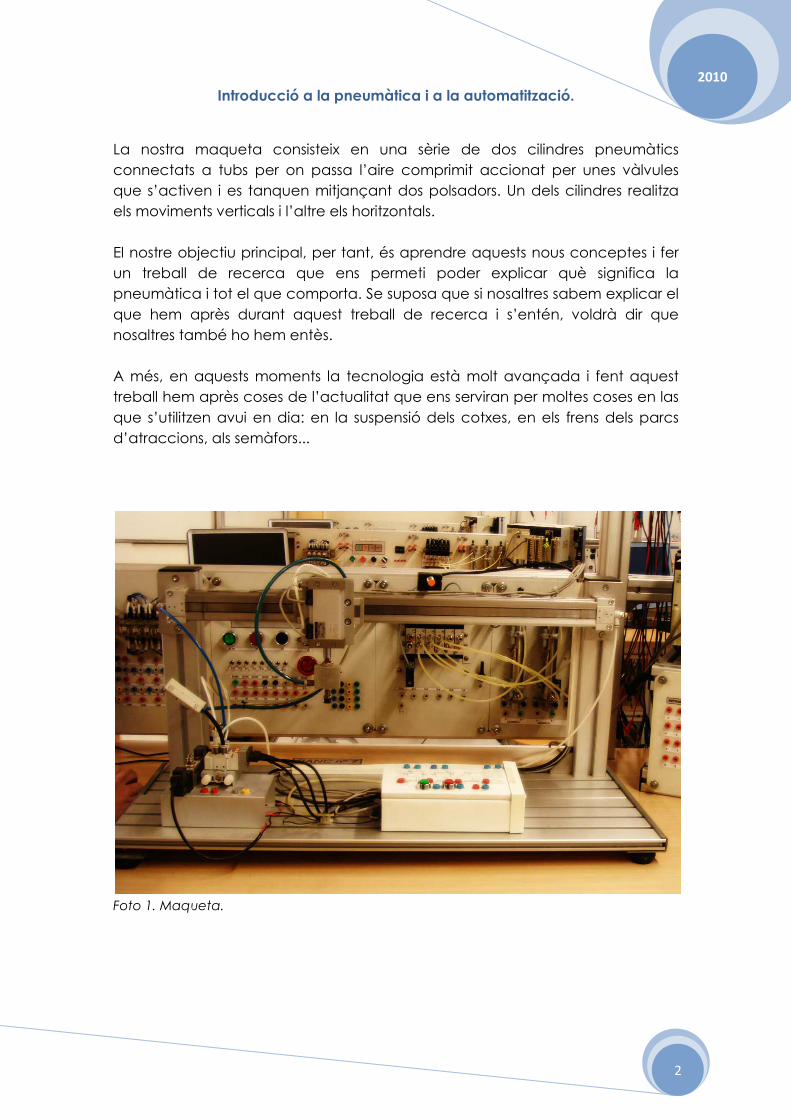
La nostra maqueta consisteix en una sèrie de dos cilindres pneumàtics connectats a tubs per on passa l’aire comprimit accionat per unes vàlvules que s’activen i es tanquen mitjançant dos polsadors. Un dels cilindres realitza els moviments verticals i l’altre els horitzontals. El nostre objectiu principal, per tant, és aprendre aquests nous conceptes i fer un treball de recerca que ens permeti poder explicar què significa la pneumàtica i tot el que comporta. Se suposa que si nosaltres sabem explicar el que hem après durant aquest treball de recerca i s’entén, voldrà dir que nosaltres també ho hem entès. A més, en aquests moments la tecnologia està molt avançada i fent aquest treball hem après coses de l’actualitat que ens serviran per moltes coses en las que s’utilitzen avui en dia: en la suspensió dels cotxes, en els frens dels parcs d’atraccions, als semàfors...
Foto 1. Maqueta.

Introducció a la pneumàtica i a la automatització.
3
2010
2.- Introducció a la pneumàtica.
L’energia pneumàtica és la que utilitza totes les propietats que sorgeixen de la utilització de l’aire comprimit. La pneumàtica és la part de la tecnologia que estudia les màquines i els aparells que funcionen amb aire comprimit. La pneumàtica és una tècnica molt estesa en el món industrial amb la utilització d’elements relativament simples i de baix manteniment, com són els actuadors o cilindres pneumàtics. Actualment, quan es parla de pneumàtica, podem pensar que, en realitat, s’ha de parlar d’electropneumàtica, ja que les aplicacions més esteses que utilitzen actuadors pneumàtics, estan controlades elèctricament per electrovàlvules i, en un tant per cent molt elevat, disposen d’un PLC (autòmat programable). 2.1.- Avantatges i inconvenients. Es poden exposar una sèrie d’avantatges i d’inconvenients, quan parlem de tècniques l’automatització pneumàtiques. 2.1.1.- Avantatges. • Es pot utilitzar en quasi tots els camps de la indústria. • És net en cas de fuga. Ideal per a indústries alimentàries i farmacèutiques. • És relativament fàcil d’emmagatzemar a pressions superiors a l’atmosfèrica (en acumuladors o dipòsits). • Es poden aconseguir variacions de velocitat dels actuadors fàcilment. • És fàcil de transportar, mitjançant canonades. 2.1.2.- Inconvenients. • L’aire dels escapaments provoca sorolls en les instal�lacions. S’han de silenciar, esmorteir, canalitzar o agrupar les vàlvules dins d’armaris insonoritzats. • Provoca un consum continu per efecte dels escapaments en el funcionament normal. • L’aire comprimit és una font d’energia cara comparada amb l’ energia elèctrica.
Introducció a la p
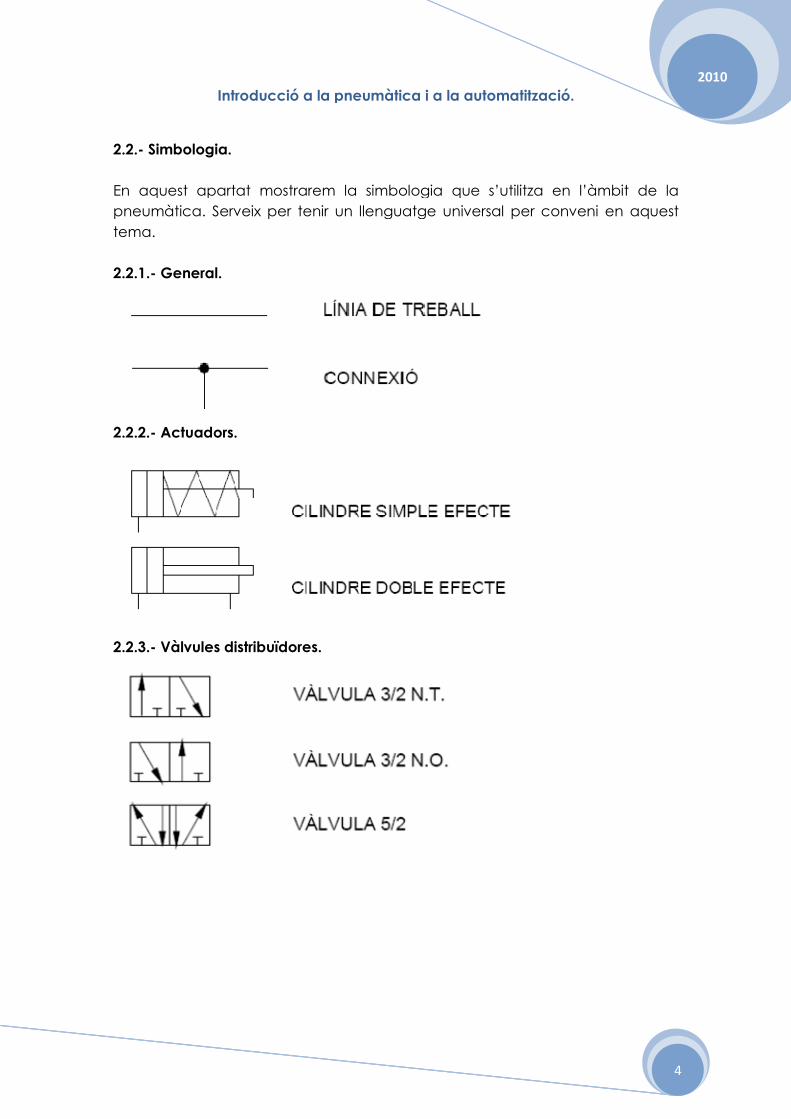
2.2.- Simbologia. En aquest apartat mostrarem la simbologiapneumàtica. Serveix per tenir un llenguatge universal per conveni en aquest tema. 2.2.1.- General.
2.2.2.- Actuadors.
2.2.3.- Vàlvules distribuïdores.
Introducció a la pneumàtica i a la automatització.
En aquest apartat mostrarem la simbologia que s’utilitza en l’àmbit de la pneumàtica. Serveix per tenir un llenguatge universal per conveni en aquest
Vàlvules distribuïdores.
tica i a la automatització.
4
2010
que s’utilitza en l’àmbit de la pneumàtica. Serveix per tenir un llenguatge universal per conveni en aquest

Introducció a la p
2.2.4.- Accionaments.
2.3.- Elements pneumàtics. En aquest apartat most(simple i doble efecte) i vàlvules 2.3.1.- Cilindres. Els cilindres pneumàtics són mecanismes que proporcionen moviments lineals i es poden diferenciar dos tipussimple efecte i doble efecte. Existeixen altres tipus de cilindres com per exemple: de doble vàsteg, plans, tàndem, multi posicionals
Foto 2. Elements d’un cilindre
Parts d’un cilindre
Introducció a la pneumàtica i a la automatització.
Elements pneumàtics.
En aquest apartat mostrarem alguns dels elements pneumàtics: cilindres (simple i doble efecte) i vàlvules.
Els cilindres pneumàtics són mecanismes que proporcionen moviments lineals i diferenciar dos tipus depenent de l’alimentació:
simple efecte i doble efecte.
Existeixen altres tipus de cilindres com per exemple: de doble vàsteg, plans, multi posicionals, telescòpics, de gir, etc...
Foto 2. Elements d’un cilindre pneumàtic.
tica i a la automatització.
5
2010
rarem alguns dels elements pneumàtics: cilindres
Els cilindres pneumàtics són mecanismes que proporcionen moviments lineals i
Existeixen altres tipus de cilindres com per exemple: de doble vàsteg, plans,

Introducció a la pneumàtica i a la automatització.
6
2010
2.3.1.1.- Cilindres de Simple Efecte. Els cilindres de S.E. només realitzen força en sentit de sortida, per acció de l’aire comprimit. El retrocés s’efectua automàticament en deixar d’aplicar pressió, retornant per l’acció d’una molla. Tenen l’inconvenient que en l’acció de retrocés només proporciona força per l’efecte de la molla, però per altra banda, té l’avantatge que el consum és inferior comparant-lo amb el cilindre de doble efecte, ja que no cal aplicar aire en la cursa de retrocés.
Foto 3. Cilindre de simple efecte.
2.3.1.2.- Cilindres de Doble Efecte. Els cilindres de D.E. tenen dues cambres per aplicar aire, tant per avançar com per a retrocedir. S’ha de tenir en compte que la força d’avanç és superior a la de retrocés, ja que s’ha de descomptar la superfície que ocupa la tija (vàsteg) de l’èmbol de la cambra de retrocés. Aquest tipus de cilindres tenen l’avantatge respecte als de simple efecte, que proporcionen força en els dos sentits de moviment, però per altra banda tenen l’inconvenient que el consum és superior, aproximadament el doble.
Foto 4. Cilindre de doble efecte.
Introducció a la p
2.4.- Vàlvules. Les vàlvules són dispositius que controlen els sistemes pneumàtics: els comandaments dels cilindres de sortida i d’entrada (marxa i parada), la regulació de la velocitat i la re Les característiques principals de les vàlvules pneumàtiques són: la funció que han de realitzar i la forma d’accionament. Segons la funció que realitzen les vàlvules es poden classificar en:• Vàlvules distribuïdores o de vies.• Vàlvules de bloqueig o anti• Vàlvules reguladores de pressió.• Vàlvules reguladores de flux o de velocitat.• Elements de buit.
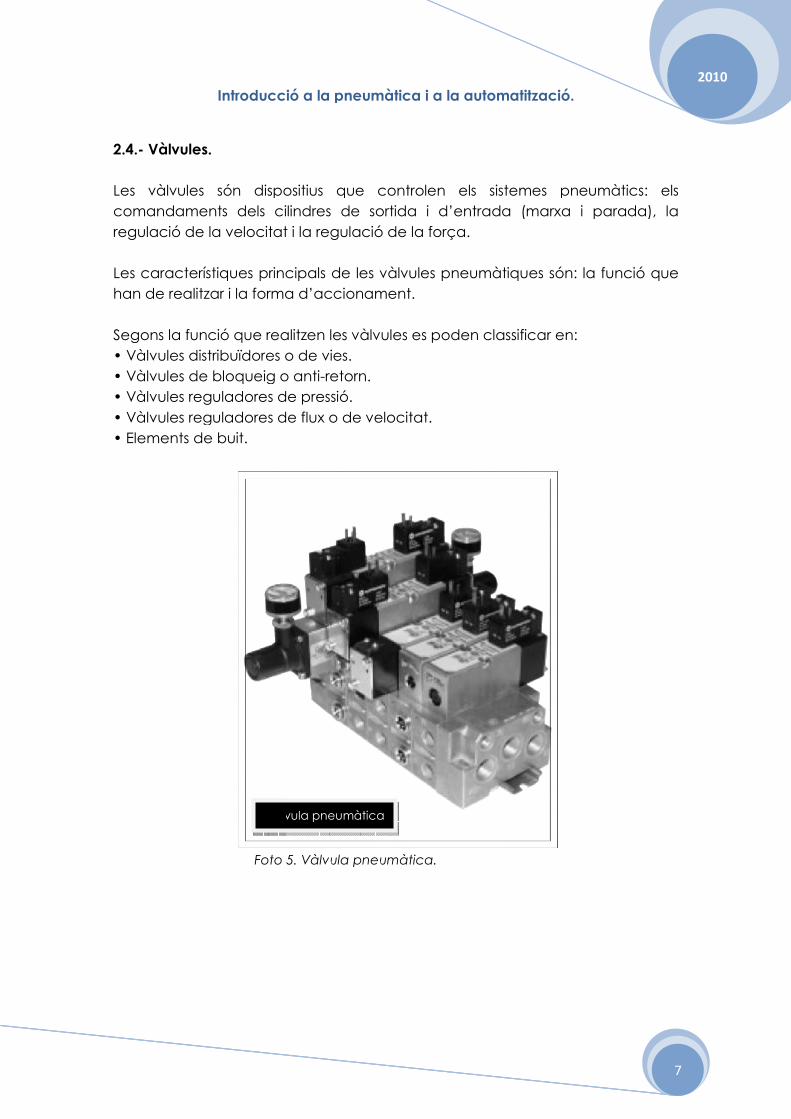
Foto 5. Vàlvula pneumàtica.
Vàlvula pneumàtica
Introducció a la pneumàtica i a la automatització.
Les vàlvules són dispositius que controlen els sistemes pneumàtics: els comandaments dels cilindres de sortida i d’entrada (marxa i parada), la regulació de la velocitat i la regulació de la força.
Les característiques principals de les vàlvules pneumàtiques són: la funció que han de realitzar i la forma d’accionament.
Segons la funció que realitzen les vàlvules es poden classificar en:Vàlvules distribuïdores o de vies.
lvules de bloqueig o anti-retorn. Vàlvules reguladores de pressió. Vàlvules reguladores de flux o de velocitat.
Foto 5. Vàlvula pneumàtica.
Vàlvula pneumàtica
tica i a la automatització.
7
2010
Les vàlvules són dispositius que controlen els sistemes pneumàtics: els comandaments dels cilindres de sortida i d’entrada (marxa i parada), la
Les característiques principals de les vàlvules pneumàtiques són: la funció que
Segons la funció que realitzen les vàlvules es poden classificar en:

Introducció a la p
3.- Descripció de la instal�lació.
Consisteix en una reproducció en maqueta d’una part d’una cadena de muntatge. Està format per dos cilindres pneumàtica dalt i cap a baix, i l’altre esquerra i dreta.Aquesta maqueta es connecta amb el PLC per poder aportar l’energia corresponent al sistema per que es mogui amb la programació que realitzem prèviament.
Foto 6. Maqueta.
Introducció a la pneumàtica i a la automatització.
Descripció de la instal�lació.
reproducció en maqueta d’una part d’una cadena de muntatge. Està format per dos cilindres pneumàtics que es desplacen un cap
i l’altre esquerra i dreta. Aquesta maqueta es connecta amb el PLC per poder aportar l’energia
l sistema per que es mogui amb la programació que realitzem
tica i a la automatització.
8
2010
reproducció en maqueta d’una part d’una cadena de s que es desplacen un cap
Aquesta maqueta es connecta amb el PLC per poder aportar l’energia l sistema per que es mogui amb la programació que realitzem
Maqueta
Introducció a la p
3.1.- Característiques dels elements qu
Foto 7. Cilindre amb ventosa, vàlvules i detector
Foto 8. Conjunt del Hardware (maqueta).
Foto 9. Detector de proximitat.
Introducció a la pneumàtica i a la automatització.
Característiques dels elements que composen la maqueta
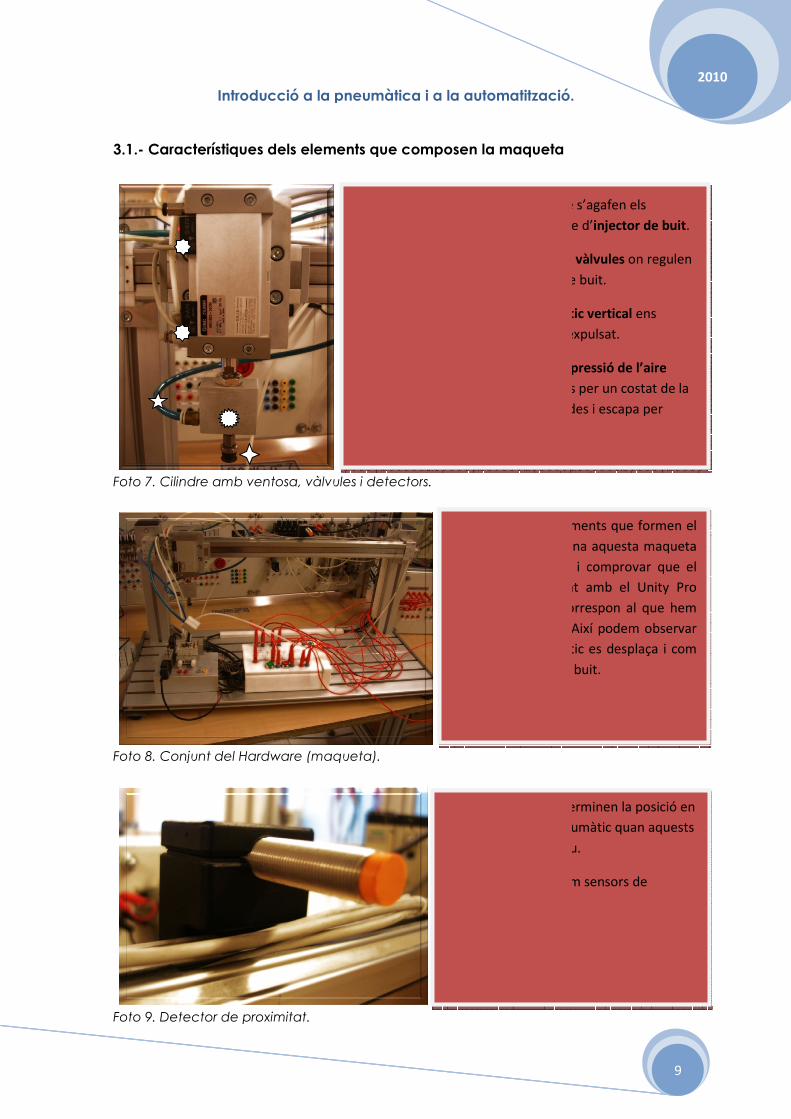
Foto 7. Cilindre amb ventosa, vàlvules i detectors.
Foto 8. Conjunt del Hardware (maqueta).
9. Detector de proximitat.
Aquí tenim la ventosa amb la que s’
objectes a partir d’un accionament de d’
L’aire passa per tubs dirigits a les
la força de l’aire i activen l’injector de buit.
Els detectors del cilindre neumàtic vertical
indiquen si el cilindre està recollit o expulsat.
El motor neumàtic determina la pressió de l’aire
disponible, l’aire comprimit és admès per un costat de la
línea de contacte de les rodes dentades i escapa per
l’altre després de rotar.
Tot el conjunt d’elements que formen el
sistema ens denomina aquesta maqueta
on podem realitzar
que hem programat amb el Unity Pro
funciona tal com correspon al que hem
escrit al programa. Així podem observar
com el braç neumàtic
s’activa l’injector de buit.
Els detectors ens determinen la
la que està el braç neumàtic
passen per davant seu.
En aquest cas utilitzem sensors de
proximitat.
tica i a la automatització.
9
2010
amb la que s’agafen els
accionament de d’injector de buit.
dirigits a les vàlvules on regulen
la força de l’aire i activen l’injector de buit.
cilindre neumàtic vertical ens
indiquen si el cilindre està recollit o expulsat.
pressió de l’aire
disponible, l’aire comprimit és admès per un costat de la
línea de contacte de les rodes dentades i escapa per
Tot el conjunt d’elements que formen el
sistema ens denomina aquesta maqueta
on podem realitzar i comprovar que el
que hem programat amb el Unity Pro
funciona tal com correspon al que hem
escrit al programa. Així podem observar
com el braç neumàtic es desplaça i com
s’activa l’injector de buit.
Els detectors ens determinen la posició en
la que està el braç neumàtic quan aquests
passen per davant seu.
En aquest cas utilitzem sensors de

Introducció a la p
3.2.- Descripció i característiques del hardware de la instal�lació.
Hardware és el conjunt d’elements que formen l’autòmat programable. diferents tipus d’elements, que ens indiquen les diferents funcions. Aquestpoden ser accionats segons els
3.2.1.- Elements d’entrada:
- Polsadors: És un element de comandament que
únicament quan s’acciona o polsa, és a dir, només en polsar
a) Connecta el circuit quan es prem. El polsador normalment obert, en el
moment que es prem, fa contacte amb els dos borns, de manera que el corrent pot circular, mentre que, quan es deixa anar, es perd el contacte i queda tallat el pas del corrent.
b) Desconnecta el circu
tancat funciona a l'inrevés que l'anterior.
Foto 10. Polsadors de marcha i aturar.
Elements d’entrada: polsadors
Introducció a la pneumàtica i a la automatització.
Descripció i característiques del hardware de la instal�lació.
Hardware és el conjunt d’elements que formen l’autòmat programable. diferents tipus d’elements, que ens indiquen les diferents funcions. Aquest
segons els diferents tipus de disseny del mecanisme.
Elements d’entrada:
s un element de comandament que genera un senyal elèctric quan s’acciona o polsa, és a dir, només en polsar-
circuit quan es prem. El polsador normalment obert, en el moment que es prem, fa contacte amb els dos borns, de manera que el corrent pot circular, mentre que, quan es deixa anar, es perd el contacte i queda tallat el pas del corrent.
Desconnecta el circuit quan es prem. És a dir, el polsador normalment tancat funciona a l'inrevés que l'anterior.
Foto 10. Polsadors de marcha i aturar.
Elements d’entrada: polsadors
tica i a la automatització.
10
2010
Hardware és el conjunt d’elements que formen l’autòmat programable. Hi ha diferents tipus d’elements, que ens indiquen les diferents funcions. Aquests
diferents tipus de disseny del mecanisme.
genera un senyal elèctric -lo.
circuit quan es prem. El polsador normalment obert, en el moment que es prem, fa contacte amb els dos borns, de manera que el corrent pot circular, mentre que, quan es deixa anar, es perd el contacte i
it quan es prem. És a dir, el polsador normalment
Introducció a la p
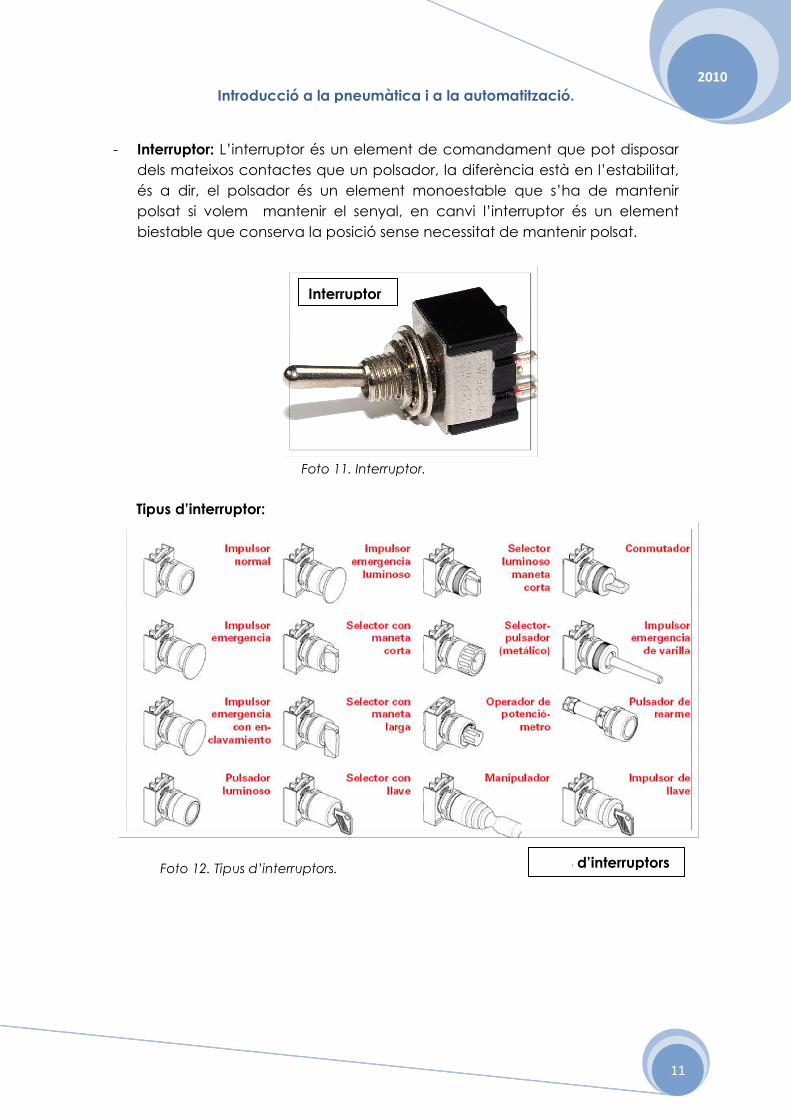
- Interruptor: L’interruptor és un element de comandament que pot disposar dels mateixos contactes que un polsador, la diferència està en l’estabilitat, és a dir, el polsador és un element monoestable que s’ha de mantenir polsat si volem mantenir el senyal, en canvi l’interruptor és un element biestable que conserva la posició sense necessit
Tipus d’interruptor:
Foto 12. Tipus d’interruptors.
Introducció a la pneumàtica i a la automatització.
L’interruptor és un element de comandament que pot disposar contactes que un polsador, la diferència està en l’estabilitat,
és a dir, el polsador és un element monoestable que s’ha de mantenir polsat si volem mantenir el senyal, en canvi l’interruptor és un element biestable que conserva la posició sense necessitat de mantenir polsat.
Foto 11. Interruptor.
Tipus d’interruptors.
Interruptor
Tipus d’interruptors
tica i a la automatització.
11
2010
L’interruptor és un element de comandament que pot disposar contactes que un polsador, la diferència està en l’estabilitat,
és a dir, el polsador és un element monoestable que s’ha de mantenir polsat si volem mantenir el senyal, en canvi l’interruptor és un element
at de mantenir polsat.
Tipus d’interruptors

Introducció a la p
- El final (fi) de cursa: És el mecanisme encarregat de captar la posició on es troba l’element del qual carro, una tija (vàsteg) de cilindre...etc. Quan l’element acciona el final de cursa, aquest dóna un senyal, que serà utilitzat per a determinar la seva posició i també per activar qualsevol altre elemenl’inconvenient que requereix de contacte físic per a la detecció de l’element, per tant sofreix d’un desgast mecànic important, encara que cada dia són més consistents degut a la qualitat dels materials emprats.
Foto 13. Finals de cursa.
- Els detectors de proximitat:
contacte i no disposen de cap part mòbil, cosa que evita el desgast mecànic. Els sensors de proximitat s’utilitzen quan es necessita una detecció d’objectes ràpida, sense manteniment i resistent al desgast. Aquests són els requisits típics i cada cop més importants en qualsevol procés d' automatització.
Foto 14. Demostració del funcionament d’un detector de proximitat.
Introducció a la pneumàtica i a la automatització.
És el mecanisme encarregat de captar la posició on es troba l’element del qual volem determinar o limitar la posició: una eleva, un carro, una tija (vàsteg) de cilindre...etc. Quan l’element acciona el final de cursa, aquest dóna un senyal, que serà utilitzat per a determinar la seva posició i també per activar qualsevol altre element. El final de cursa té l’inconvenient que requereix de contacte físic per a la detecció de l’element, per tant sofreix d’un desgast mecànic important, encara que cada dia són més consistents degut a la qualitat dels materials emprats.
Foto 13. Finals de cursa.
Els detectors de proximitat: Són detectors que actuen per proximitat i no per contacte i no disposen de cap part mòbil, cosa que evita el desgast mecànic. Els sensors de proximitat s’utilitzen quan es necessita una detecció d’objectes ràpida, sense manteniment i resistent al desgast. Aquests són els requisits típics i cada cop més importants en qualsevol procés d'
Foto 14. Demostració del funcionament d’un detector de proximitat.
Finals de cursa
tica i a la automatització.
12
2010
És el mecanisme encarregat de captar la posició on es volem determinar o limitar la posició: una eleva, un
carro, una tija (vàsteg) de cilindre...etc. Quan l’element acciona el final de cursa, aquest dóna un senyal, que serà utilitzat per a determinar la seva
t. El final de cursa té l’inconvenient que requereix de contacte físic per a la detecció de l’element, per tant sofreix d’un desgast mecànic important, encara que cada dia són més consistents degut a la qualitat dels materials emprats.
Són detectors que actuen per proximitat i no per contacte i no disposen de cap part mòbil, cosa que evita el desgast mecànic. Els sensors de proximitat s’utilitzen quan es necessita una detecció d’objectes ràpida, sense manteniment i resistent al desgast. Aquests són els requisits típics i cada cop més importants en qualsevol procés d'
Foto 14. Demostració del funcionament d’un detector de proximitat.

Introducció a la p
Foto 15. Detector de proximitat.
- Les característiques més importants dels sensors de proximitat poden ser:
• Sense manteniment i resistents al desgast• No hi ha contacte físic• Sense contacte, i per tant lliures de rebots• Alta freqüència operativa• Es poden instal�lar en qualsevol posició• Temps de vida independent de la freqüència operativa• Insensibles a les vibracions• Insensibles a l' acumulació de pols• Estancs a l' aigua• Molt resistents als productes químics
En general, la forma més convenient de realitzar les connexions entre detectors, és amb la utilització de relès o mitjançant PLC’s.
El símbolnormalmentcontínua (connexions verticals) i un que és el que dona el senyal de detecció, amb una tensió en continua que és la que s’encarrega d’activar l’entrada o el relé que transmet la informació de detecció.
Foto 16. Simbolització
d’un detector.
Introducció a la pneumàtica i a la automatització.
Foto 15. Detector de proximitat.
més importants dels sensors de proximitat poden ser:
Sense manteniment i resistents al desgast. No hi ha contacte físic. Sense contacte, i per tant lliures de rebots.
freqüència operativa. Es poden instal�lar en qualsevol posició. Temps de vida independent de la freqüència operativa.Insensibles a les vibracions. Insensibles a l' acumulació de pols. Estancs a l' aigua. Molt resistents als productes químics.
En general, la forma més convenient de realitzar les connexions entre utilització de relès o mitjançant PLC’s.
símbol del detector és el que es pot veure a la figura, normalment porta tres fils, dos per a la alimentació en contínua (connexions verticals) i un que és el que dona el senyal de detecció, amb una tensió en continua que és la que s’encarrega d’activar l’entrada o el relé que transmet la informació de detecció.
Detector de proximitat
tica i a la automatització.
13
2010
més importants dels sensors de proximitat poden ser:
.
En general, la forma més convenient de realitzar les connexions entre
del detector és el que es pot veure a la figura, porta tres fils, dos per a la alimentació en
contínua (connexions verticals) i un que és el que dona el senyal de detecció, amb una tensió en continua que és la que s’encarrega d’activar l’entrada o el relé que

Introducció a la p
3.2.2.- Elements de sortida. - Vàlvules: són dispositius que controlen els sistemes pneumàtics: els
comandaments dels cilindres de sortida i d’entrada (marxa i parada), la regulació de la velocitat i la regulació de la principals de les vàlvules pneumàtiques són: la funció que han de realitzar i la forma d’accionament.
Foto 17.
- Pilots: són molt útils per a indicar l’estat de funcionament o de parada
d’una màquina o instal�lació. Encara que el sol fet d’il�luminarobtenir informació si aquesta ve donada per un rètol, però també és important saber que depenent del color del pilot ja queda definida (a grans trets) l’estat de funcionament, parada o al
Foto 18. Pilots de la maqueta.
Vàlvula
Introducció a la pneumàtica i a la automatització.
Elements de sortida.
són dispositius que controlen els sistemes pneumàtics: els comandaments dels cilindres de sortida i d’entrada (marxa i parada), la regulació de la velocitat i la regulació de la força. Les característiques principals de les vàlvules pneumàtiques són: la funció que han de realitzar i la forma d’accionament.
Foto 17. Vàlvula de la maqueta.
són molt útils per a indicar l’estat de funcionament o de parada màquina o instal�lació. Encara que el sol fet d’il�luminar
obtenir informació si aquesta ve donada per un rètol, però també és important saber que depenent del color del pilot ja queda definida (a grans trets) l’estat de funcionament, parada o alerta.
Foto 18. Pilots de la maqueta. Foto 19. Pilots.
Vàlvula
tica i a la automatització.
14
2010
són dispositius que controlen els sistemes pneumàtics: els comandaments dels cilindres de sortida i d’entrada (marxa i parada), la
força. Les característiques principals de les vàlvules pneumàtiques són: la funció que han de realitzar i
són molt útils per a indicar l’estat de funcionament o de parada màquina o instal�lació. Encara que el sol fet d’il�luminar-se es pot
obtenir informació si aquesta ve donada per un rètol, però també és important saber que depenent del color del pilot ja queda definida (a
Foto 19. Pilots.
Introducció a la p
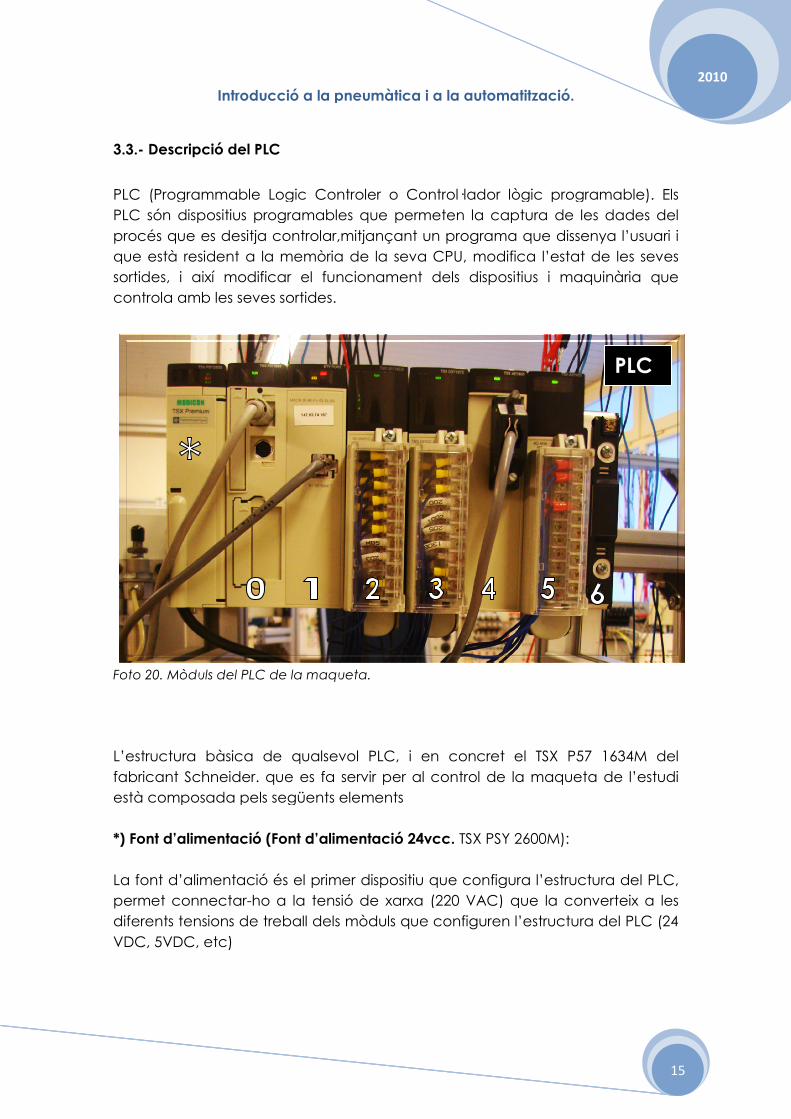
3.3.- Descripció del PLC
PLC (Programmable Logic Controler o Control�lador lògic programablePLC són dispositius programables que permeten la captura de les dades deprocés que es desitja controque està resident a la memòria de la seva CPU, modifica l’estat de les seves sortides, i així modificar el funcionament dels disposcontrola amb les seves sortides.
Foto 20. Mòduls del PLC de la maqueta.
L’estructura bàsica de qualsevol PLC, i en concret el TSX P57 1634M del fabricant Schneider. que es fa servir per al control de la maquestà composada pels següents elements *) Font d’alimentació (Font d’alimentació 24vcc. La font d’alimentació és el primer dispositiu que configura l’estructura del PLC, permet connectar-ho a la tensió de xarxa (220 VAC) que la converteix a les diferents tensions de treball dels mVDC, 5VDC, etc)
Introducció a la pneumàtica i a la automatització.
Programmable Logic Controler o Control�lador lògic programableprogramables que permeten la captura de les dades de
es desitja controlar,mitjançant un programa que dissenya l’usuari i que està resident a la memòria de la seva CPU, modifica l’estat de les seves sortides, i així modificar el funcionament dels dispositius i maquinària que
a amb les seves sortides.
Foto 20. Mòduls del PLC de la maqueta.
bàsica de qualsevol PLC, i en concret el TSX P57 1634M del fabricant Schneider. que es fa servir per al control de la maquestà composada pels següents elements
Font d’alimentació 24vcc. TSX PSY 2600M):
La font d’alimentació és el primer dispositiu que configura l’estructura del PLC, a la tensió de xarxa (220 VAC) que la converteix a les
diferents tensions de treball dels mòduls que configuren l’estructura
tica i a la automatització.
15
2010
Programmable Logic Controler o Control�lador lògic programable). Els programables que permeten la captura de les dades del
issenya l’usuari i que està resident a la memòria de la seva CPU, modifica l’estat de les seves
itius i maquinària que
bàsica de qualsevol PLC, i en concret el TSX P57 1634M del fabricant Schneider. que es fa servir per al control de la maqueta de l’estudi
La font d’alimentació és el primer dispositiu que configura l’estructura del PLC, a la tensió de xarxa (220 VAC) que la converteix a les
l’estructura del PLC (24
PLC

Introducció a la pneumàtica i a la automatització.
16
2010
0 i 1) CPU. TSX P57 1634M: Defineix les característiques bàsiques de l’equip de control. Te la funció de supervisar i controlar tot els sistema, és un sistema basat en un microcontrolador i les característiques d’aquest mòdul determina les capacitats que tindrà un autòmat com són: - Conjunt d’instruccions de programació - Capacitat de direccionalment de memòria - Tipus de variables amb les que es poden treballar - Numero de mòduls d’entrades i sortides inestables en el sistema. - Velocitat del procés. Les funcions bàsiques d’aquest mòdul són les següent: - Captar l’estat de les entrades i emmagatzemar en la zona de memòria
(imatge) de les entrades i sortides, ja que el programa d’usuari no permet accedir directament a aquestes entrades.
- Executar el programa del usuari. - Vigilar que el temps d’execució del programa no superi al temps màxim.
Aquesta funció s’anomena Watchdog. - Renovar l’estat de les sortides en funció de les mateixes imatges,
obtingudes al final del cicle del programa de l’usuari. - Revisar el sistema per determinar l’existència dels errors de hardware o
software.
2) Entrades binàries de 24VDC TSX DEY 16D2: La funció de les entrades digitals o booleanes que té un PLC són: - Captar la informació binaria existent en el sistema. - Aïllar elèctricament la part del sistema que controlem d’altres mòduls que
integren el sistema. - Adaptar les diferents senyals del procés a la tipologia de senyal que es
capaç de treballar el processador.
Per tant la seva funció principal és la de detectar la presència o absència de tensió en els seus borns i convertir-lo en un senyal lògic "1" o "0" que s'emmagatzema en una zona de memòria del PLC anomenada registre d'imatge d'entrades i mitjançant aquest valor li permet obtenir una informació del procés en qüestió.
Introducció a la pneumàtica i a la automatització.
17
2010
3) Sortides binàries de 24 VDC TSX DSY 16T2: La funció de les sortides digitals que integra un PLC són: - Transferir els resultats lògics del programa als diferents preactuadors i actuadors que comporten el sistema. - Aïllar elèctricament la part del sistema a controlar d'altres mòduls que integren l'estructura de l'autòmat. - Adaptar les diferents senyals del procés a la tipologia de senyal que és capaç de treballar el processador. Per tant el valor binari de les sortides digitals es converteix en l'obertura o tancament d'un relé o transistor depenent de l'estructura del mòdul.
4) Entrades analògiques TSX AEY800: Els mòduls d'entrada analògiques permeten que el autòmats treballin amb accionadors de comandament analògic i llegeixin senyals de tipus analògic com podrien ser de temperatura, de pressió o cabal. La seva funció principal consisteix a convertir una magnitud analògica en un nombre que s'emmagatzema en una variable interna de l'autòmat. El que fa és una conversió de A / D, ja que l'autòmat només treballa amb senyals digitals. Aquesta conversió es realitza amb precisió o resolució determinada i cada cert interval de temps. Una de les característiques més importants és que aquests mòduls poden llegir tensió o intensitat. 5) Sortides analògiques TSX ASY410:
Els mòduls de sortida analògica permeten que el valor d'una variable numèrica interna de l'autòmat es converteixi en tensió o intensitat. El que fa és una conversió D / A, ja que l'autòmat només treballa amb senyals digitals. Aquesta conversió es realitza amb una precisió o resolució determinada (nombre de bits) i cada cert interval de temps (període mostreig). Aquesta tensió o intensitat pot servir de referència de comandament per actuadors que admetin comandament analògic com poden ser els variadors de velocitat, les etapes de els tiristors dels forns, reguladors de temperatura ... permetent al autòmat realitza funcions de regulació i control de processos continus. 6) Mòdul buit: En la nostra maqueta no ens calen més mòduls de cap dispositiu però existeix per si es necessités.

Introducció a la pneumàtica i a la automatització.
18
2010
4.- Esquemes de connexió.
Una instal�lació elèctrica, per senzilla que sigui, consisteix en un circuit en el qual hi ha diversos components connectats mitjançant conductors. Qualsevol circuit es pot representar gràficament en forma d’esquema, en el qual apareixen els components i les connexions entre ells. Per tal de poder representar d’una forma simplificada i entenedora qualsevol circuit elèctric en forma d’esquema, cada element que ha d’intervenir té un símbol, aquests símbols estan normalitzats. Les normes utilitzades en el nostre país estan regides per les normes UNE i les del Reglament Electrotècnic de Baixa Tensió REBT. A nivell europeu estan les normes CENELEC i les de caire internacional més representatives són les CEI. Encara que existeixen multitud d’òrgans que emeten normatives, la uniformitat d’aquestes cada cop està més propera i moltes normes són coincidents. És important que quedi clar que les característiques tècniques dels components que intervenen en una instal�lació són un complement fonamental a més dels esquemes corresponents amb la simbologia adequada.

Introducció a la pneumàtica i a la automatització.
19
2010
5.- Introducció a la programació en LADDER. Els PLC o autòmats programables, necessiten d’un programa, que relacioni el que són les entrades i les sortides de l’equip en funció del cicle de treball del procés que estem automatitzant. La majoria d’autòmats disposen de diferents llenguatges de programació (llista d’instruccions, estructurat, GRAFCET, etc), però és sense dubta el llenguatge Ladder, per la seva proximitat als esquemes elèctrics el que més difusió ha tingut i el que actualment es fa servir més a l’hora de programar un equip com aquest. Està basat en contactes normalment oberts (NA) i tancats (NC), els quals s’associen a les variables del PLC ( entrades, sortides o marques) i que mitjançant la seva associació en sèrie i paral�lel, permeten l’activació i la desactivació d’una bobina, que és la que permet activar una sortida del PLC. Per tant, per poder conèixer com és programa un PLC, s’ha de tenir clar els elements que permeten la seva programació: - Variables de l’autòmat - Contactes - Bobines - Comptadors - Temporitzadors
5.1.- Estructura i variables d’un programa amb LADDER.
En aquest apartat explicarem l’estructura amb la que es treballa la programació en LADDER i les seves característiques. Seguidament anomenarem les variables que composen la programació amb el Unity Pro.
5.1.1.- Estructura del programa: L'esquema d’un programa en Ladder ha de ser realitzat entre dues línies d'alimentació disposades verticalment a banda i banda del diagrama, entre les quals s'han de situar els elements del llenguatge Ladder dels que disposarà el programa. A la dreta del diagrama es col�loquen els elements de sortida (com poden ser bobines, motors ...) i a l'esquerra els elements d'entrada (contactes NC, NA ...). El diagrama pot tenir diverses branques, cada branca permet ubicar diversos elements d'entrada però només un de sortida. Si volem tenir diverses sortides

Introducció a la p
haurem de posar-les en paral�lel a una branca diferent com a la realimentació. No es pot connectar unacasos s'intercala un contacte tancat d'una marca o bit o relé intern qualsevol.
Foto 21. Exemple d’estructura del programa en LADDER
5.1.2.-Variables Les variables, permeten identificar d’diferents posicions de memòria que disposa el PLC (entrades, sortides, interns)
Foto 22. Variables del programa.
Principalment, en el nostre programa de control, farBooleanes, és a dir variables l’estat de desactivació i 1 que indica l’estat d’activació. EL PLC disposa de les variables tipus BOOL per les variables booleanes internes (%M) les variables booleanes que tenen un reflex a l’e%Q).
Introducció a la pneumàtica i a la automatització.
les en paral�lel a una branca diferent com a la
No es pot connectar una sortida directament a la línia principal, en aquests casos s'intercala un contacte tancat d'una marca o bit o relé intern qualsevol.
Foto 21. Exemple d’estructura del programa en LADDER
Les variables, permeten identificar d’una manera senzilla per a l’diferents posicions de memòria que disposa el PLC (entrades, sortides, interns)
Foto 22. Variables del programa.
Principalment, en el nostre programa de control, farem servir variables s a dir variables que només poden tenir dos estats, 0 que indica
l’estat de desactivació i 1 que indica l’estat d’activació. EL PLC disposa de les per les variables booleanes internes (%M) el
les variables booleanes que tenen un reflex a l’entrada o sortida del PLC (%I
tica i a la automatització.
20
2010
les en paral�lel a una branca diferent com a la
sortida directament a la línia principal, en aquests casos s'intercala un contacte tancat d'una marca o bit o relé intern qualsevol.
manera senzilla per a l’usuari les diferents posicions de memòria que disposa el PLC (entrades, sortides, interns)
em servir variables que només poden tenir dos estats, 0 que indica
l’estat de desactivació i 1 que indica l’estat d’activació. EL PLC disposa de les el EBOOL per a
ntrada o sortida del PLC (%I
Introducció a la pneumàtica i a la automatització.
21
2010
A més a més, el programa Unity, amb el qual realitzem el sistema de control, permet associar a cada variable del PLC, un nom que faci referència a la seva funció dins el procés, el que permet a l’usuari identificar les variables amb la seva funció dins el programa. - Objectes d’entrada/sortida. Associats al mòdul o als mòduls que tenen la funció d'interfície amb els dispositius externs com sensors o preaccionadors. La sintaxi que s'utilitza és: (Les entrades es denominen% I i les sortides% Q).
%I Indica un objecte de llenguatge d'entrada binària. %Q Indica un objecte de llenguatge de sortida binària. %Mi (%M11, %M30) Indica un objecte de llenguatge de marca binària.
El nombre que l'acompanya separat per punts indica: El nombre de rack o bastidor, la posició en què està col�locat el mòdul i el canal corresponent, així per exemple %I0.3.1, indica el canal 1 (entrada 1) del mòdul situat a la posició 3 del rack 0. Per a les sortides es fa servir la mateixa sintaxi. - Objectes del sistema. Són posicions de memòria de l'autòmat que permeten interactuar amb el sistema de l'autòmat, modificant el seu funcionament o bé informant a l'usuari de successos o errors en el maquinari. Només es tracten com a paraules o bits, i la seva denominació és %S seguit de la seva grandària. 5.1.3.- Contactes - Normalment obert : L'estat de la connexió de l'esquerra es transfereix a la connexió de la dreta si l'estat del paràmetre booleà real corresponent està actiu (aquest pot ser un polsador, un captador etc ...). En cas contrari, l'estat de la connexió dreta està inactiu.
- Normalment tancat :
L'estat de la connexió de l'esquerra es transfereix a la connexió de la dreta si l'estat del paràmetre booleà real corresponent està inactiu. En cas contrari, l'estat de la connexió dreta està inactiu.

Introducció a la pneumàtica i a la automatització.
22
2010
5.1.4.- Bobines
- Bobina : L'estat de la connexió de l'esquerra es transfereix al paràmetre booleà real corresponent (indicat mitjançant la designació de la bobina) a la connexió de la dreta.
- Bobina negada : En el cas d'aquestes bobines, l'estat de la connexió de l'esquerra es copia a la connexió de la dreta. L'estat invertit de la connexió de l'esquerra es copia al paràmetre booleà real corresponent. Si la connexió de l'esquerra està inactiva, la connexió de la dreta també estarà inactiva i el paràmetre booleà real corresponent estarà actiu.
- Bobina de SET : En el cas d'aquestes bobines, l'estat de la connexió de l'esquerra es copia a la connexió de la dreta. L'estat invertit de la connexió de l'esquerra es copia al paràmetre booleà real corresponent. Si la connexió de l'esquerra està inactiva, la connexió de la dreta també estarà inactiva i el paràmetre booleà real corresponent estarà actiu.
- Bobina de RESET : L'estat de la connexió de l'esquerra es copia a la connexió de la dreta. El paràmetre booleà real corresponent està inactiu si la connexió de l'esquerra està activa. Si no, roman sense canvis. El paràmetre booleà real corresponent pot establir mitjançant la bobina d'ajust.

Introducció a la p
- Temporitzadors.
Foto 23. Temporitzadors en LADDER.
Dispositiu que comanda una determinada operació durant un moment o un temps determinat. Quan el procés arriba a un moment determinat on hi hem dit que s’accioni el temporitzador, aquest comença a microsegons o segons. - Comptadors.
Foto 24. Comptadors en LADDER.
Serveixen per identificar la quantitat de vegades que s’ha realitzat una acció o la quantitat d’objectes que s’estan utilitzant en un procés.
Introducció a la pneumàtica i a la automatització.
Foto 23. Temporitzadors en LADDER.
Dispositiu que comanda una determinada operació durant un moment o un
Quan el procés arriba a un moment determinat on hi hem dit que s’accioni el temporitzador, aquest comença a funcionar contant (normalment) els
Foto 24. Comptadors en LADDER.
Serveixen per identificar la quantitat de vegades que s’ha realitzat una acció o la quantitat d’objectes que s’estan utilitzant en un procés.
tica i a la automatització.
23
2010
Dispositiu que comanda una determinada operació durant un moment o un
Quan el procés arriba a un moment determinat on hi hem dit que s’accioni el funcionar contant (normalment) els
Serveixen per identificar la quantitat de vegades que s’ha realitzat una acció o

Introducció a la pneumàtica i a la automatització.
24
2010
6.- Descripció seqüencial d’un procés: GRAFCET. El GRAFCET, és un sistema d’ajut, i a l’hora també un sistema de programació que han incorporat alguns fabricants, que permet descriure el funcionament d’un sistema a controlar mitjançant un diagrama de fluxos, que seguint unes regles determinades, permet la definició del funcionament del procés. Per a poder portar a terme aquest sistema, s’han definit tres tipus de nivell de GRAFCET, segons la seva descripció, és a dir, la quantitat d'informació escrita i el seu grau de tecnicisme. A continuació es detallarà com són cada nivell partint d'un exemple d'una trepant. En el primer nivell interessa una descripció global, poc detallada de l'automatisme que permeti comprendre ràpidament la seva funció. És el tipus de descripció que faríem per explicar el que volem que faci la màquina a la persona que l'ha de dissenyar o el que utilitzaríem per justificar, a les persones amb poder de decisió en l'empresa, la necessitat d'aquesta màquina.
Foto 25. Exemple de GRAFCET en el primer nivell.
Aquest GRAFCET no ha de contenir cap referència a les tecnologies utilitzades, és a dir, no s'especifica com fem avançar la peça (cilindre pneumàtic, motor i cadena, cinta transportadora, etc.), ni com vam detectar la seva posició (fi de carrera), ni tan només el tipus d'automatisme utilitzat.

Introducció a la pneumàtica i a la automatització.
25
2010
El segon nivell, traspassa la descripció literal del procés a una descripció tècnica dels elements que es fan servir i les accions que es deriven.
Foto 26. Exemple de GRAFCET en el segon nivell.
El tercer nivell és una descripció operativa. S'han d'especificar tots els elements, amb els distintius propis de les entrades i sortides de l'autòmat amb el qual es treballa, així com les marques o relés interns que seran utilitzats.
Foto 27. Exemple de GRAFCET en el tercer nivell.

Introducció a la pneumàtica i a la automatització.
26
2010
6.1.- Metodologia pel pas d’un GRAFCET a un LADDER.
A continuació es detalla un exemple d'un exercici. Aquest exercici consisteix en realitzar un Grafcet de nivell 1 i realitzar-lo en el llenguatge Ladder. El cicle continuo s’inicia al prémer marxa (S1-NA) connectat a %I.0.2.0, i s’aturarà instantàniament el prémer stop (S2-NA) connectat a %I.0.2.1. amb la variable del cicle continuo activa, al detectar-se un envàs en D1 (%I.0.2.2) s’activarà la cinta transportadora (%Q.0.3.0). El detectar D2 (%I.0.2.3), s’aturarà la cinta i es produirà l’obertura de K1 (%Q.0.3.1), omplint l’envàs amb deu elements, que seran detectats per D5 (%I.0.2,6). Un cop ple es desactivarà K1i s’iniciarà una nova posada en marxa de la cinta, fins que detecti D3 (%I.0.2.4), parant un altre cop la cinta i produint l’accionament de K2 (%Q.0.3.2) durant vint segons. Quan hagin passat els vint segons s’iniciarà de nou el moviment de la cinta fins detectar un posició D4 (%I.0.2.5), parant la cinta i expulsant l’envàs mitjançant l’acció del cilindre de doble efecte controlat per una vàlvula amb solenoide K3 ( %Q.0.3.3) i retorn per motlle. L’activació de K3 es realitzarà durant tres segons, quan hagin passat es desactiva, llavors es recull el cilindre. Un cop recollit el cilindre esperarà un nou envàs en D1 per inicià un altre cicle.
Foto 28. GRAFCET nv.1 de l’exercici.

Introducció a la pneumàtica i a la automatització.
27
2010
Foto 29. GRAFCET nv.2 de l’exercici.
Un cop hem fet el programa en GRAFCET ho traduïm a LADDER mitjançant, en el nostre cas, el Unity Pro.
Foto 30. LADDER de l’exercici.

Introducció a la p
7.- Descripció de l’entorn de programació de UNITYPRO.
Foto 31. PLC.
El Unity Pro s’utilitza amb l’ultima Controllers (PLC) i Programmable És un software tradicional de programació. Ethernet és un estàndard de xarxes d'ordinadors d'àrea local amb accésmedi per contesa CSMA / CD.
Introducció a la pneumàtica i a la automatització.
entorn de programació de UNITYPRO.
El Unity Pro s’utilitza amb l’ultima línia “Modicon® Programmable Logic Controllers (PLC) i Programmable Automation Controllers (PAC). És un software tradicional de programació. Ethernet és un estàndard de xarxes d'ordinadors d'àrea local amb accésmedi per contesa CSMA / CD.
tica i a la automatització.
28
2010
Modicon® Programmable Logic
Ethernet és un estàndard de xarxes d'ordinadors d'àrea local amb accés al
Introducció a la p
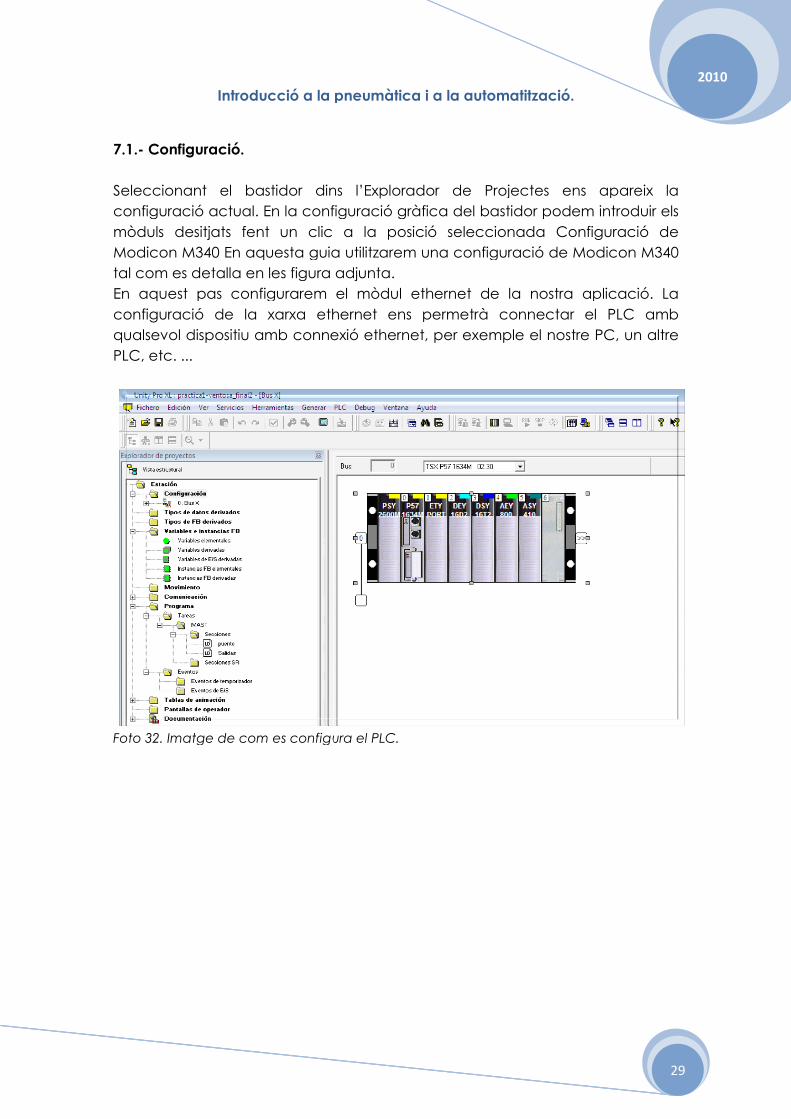
7.1.- Configuració. Seleccionant el bastidor dins configuració actual. En la configuració gràfica del bastidor podem introduir els mòduls desitjats fent un clic a la posició seleccionada Configuració de Modicon M340 En aquesta guia utilitzarem una configuració de Modicon M340 tal com es detalla en les figura adjunta.En aquest pas configurarem el mòdul ethernet de la nostra aplicació. La configuració de la xarxa ethernet ens permetrà connectar el PLC amb qualsevol dispositiu amb connexió ethernet, per exemple el nostre PC, un altre PLC, etc. ...
Foto 32. Imatge de com es configura el PLC.
Introducció a la pneumàtica i a la automatització.
Seleccionant el bastidor dins l’Explorador de Projectes ens apareix la configuració actual. En la configuració gràfica del bastidor podem introduir els mòduls desitjats fent un clic a la posició seleccionada Configuració de Modicon M340 En aquesta guia utilitzarem una configuració de Modicon M340
com es detalla en les figura adjunta. En aquest pas configurarem el mòdul ethernet de la nostra aplicació. La
de la xarxa ethernet ens permetrà connectar el PLC amb qualsevol dispositiu amb connexió ethernet, per exemple el nostre PC, un altre
. Imatge de com es configura el PLC.
tica i a la automatització.
29
2010
Projectes ens apareix la configuració actual. En la configuració gràfica del bastidor podem introduir els mòduls desitjats fent un clic a la posició seleccionada Configuració de Modicon M340 En aquesta guia utilitzarem una configuració de Modicon M340
En aquest pas configurarem el mòdul ethernet de la nostra aplicació. La de la xarxa ethernet ens permetrà connectar el PLC amb
qualsevol dispositiu amb connexió ethernet, per exemple el nostre PC, un altre

Introducció a la pneumàtica i a la automatització.
30
2010
7.2.- Simulació. Programem el circuit que volem que realitzi el sistema. Segons les variables de cada component d’entrada i de sortida que apliquem al sistema de connexions del PLC el sistema realitzarà un circuit o un altre. Per exemple podríem aplicar la programació que vam realitzar a les primeres pràctiques amb el Unity Pro: 1er – Prémer marcha. 2on – Expulsar el cilindre A. 3er – Expulsat el cilindre A, expulsar el cilindre B. 4rt – Expulsat el cilindre B, recollir el cilindre A. 5è – Recollit el cilindre A, recollir el cilindre B. 6è – Recollit el cilindre B, el sistema acabarà en repòs. Tot això ho hem de traduir al sistema Grafcet en Nivells 1 i 2 com hem explicat anteriorment en la part de programació del Unity Pro. Un cop tenim el circuit programat ja podem passar a transferir el programa al PLC. 7.3.- Transferència i depuració. Per transferir el que hem programat al PLC hem de seguir uns passos i assegurar-nos de que tot està correcte. A continuació explicarem quins són aquests passos:

Introducció a la pneumàtica i a la automatització.
31
2010
1er – Posar el PLC a “modalitat de simulació”.
Foto 33. Imatge de com realitzar la modalitat de simulació.

Introducció a la pneumàtica i a la automatització.
32
2010
2on – Generar el projecte.
Foto 34. Imatge de com generar els canvis del projecte al PLC.

Introducció a la pneumàtica i a la automatització.
33
2010
3er – Connectar el PLC.
Foto 35. Imatge de com connectar el PLC.

Introducció a la pneumàtica i a la automatització.
34
2010
4rt – Transferir el projecte al PLC (observem que el fons del programa es posa de color gris).
Foto 36. Imatge de com transferir el fitxers al PLC.

Introducció a la pneumàtica i a la automatització.
35
2010
5è – Premem el “RUN” i acceptar. (Si volem que el procés sigui continu podem parar el sistema i amb el botó dret seleccionar els components que volem que segueixin en funcionament i prémer la opció de “Forzar (1/0)”).
Foto 37. Imatge de com posar en funcionament el que hem programat.

Introducció a la pneumàtica i a la automatització.
36
2010
6è – En el cas que no s’hagi realitzat el que havíem programat o que hi ha un error i volem modificar la programació em de desconnectar el simulador i tornar a fer els processos anteriors.
Foto 38. Imatge de com desconnectar el PLC.

Introducció a la pneumàtica i a la automatització.
37
2010
8.- Exemples d’aplicació de la pneumàtica. AMORTIDORS: Tenen com a missió absorbir l'excés de força del rebot del vehicle, és a dir, eliminant els efectes oscil�latoris de les molles.
Foto 39. Amortidor.
Els hidràulics s'uneixen igualment per un extrem al bastidor i per l'altre a l'eix o roda i estan formats per dos cilindres excèntrics, dins dels quals es desplaça un piu per l'efecte de les oscil�lacions a les que ofereix resistència.
Foto 40. Cilindre hidràulic.

Introducció a la pneumàtica i a la automatització.
38
2010
Portes dels autobusos: A les portes d’autobusos, acostumen a haver-hi uns cilindres d’aire comprimit (solen estar a la part superior) i quan el conductor prem el boto de que activa el sistema s’omple el cilindre d’aire comprimit i per tancar-se torna a sortir.
Foto 41. Sistema d’obertura d’un autobús.
Sistemes de frens de les atraccions Foto 42. Sistemes de frens d’una muntanya rusa.

Introducció a la pneumàtica i a la automatització.
39
2010
9.- Conclusions. Gràcies a aquest treball hem après conceptes que no coneixíem fins ara i que creiem que ens ajudarà molt a entendre com estan programats molts dels aparells i màquines automatitzades que utilitzem en la nostra vida diària. Hem arribat a la conclusió de que la automatització ha fet que molts treballs siguin menys costosos per a les persones, fins i tot reemplaçar-nos. També hem descobert que sense aquests avenços tecnològics la humanitat actual es veuria amb moltes dificultats per tornar a treballar amb tranquil�litat ja que gràcies a aquests sistemes ens “hem oblidat” de com es feien i els esforços que havíem de realitzar per concloure algunes tasques. Creiem que aquest treball també ens ha ajudat a conèixer millor el nostre entorn i a ficar-nos en el món de la automatització i la programació d’autòmats. Hi hauria d’haver més quantitat de persones que s’interessessin pel tema, ja sigui a fons o generalitzat, i difondre aquests coneixements mínims a tothom per que se’n adoni de lo important que és aquest àmbit de la tecnologia actual. Amb aquest treball de recerca també hem après a programar una maqueta senzilla d’una part de una cadena de muntatge. Abans de fer el treball no estàvem familiaritzades en cap funcionament de l’entorn de l’automatització. Gràcies a aquest treball també hem descobert moltes utilitats de la pneumàtica a la nostra vida quotidiana que no sabíem que funcionaven així.

Introducció a la pneumàtica i a la automatització.
40
2010
10.- Bibliografia. Links: www.transmisiondepotencia.com/motoresneumaticos/ www.xtec.es/aulanet/ud/tecno/ielectriques/a2/a22.htm www.almuro.net/sitios/Mecanica/suspension.asp?sw12=1#amortiguadores
Apunts: - Moodle. - Dossier que ens van proporcionar els professors de la UPC en la seva pàgina
web. + Exercicis sobre el tema. - Automatismes elèctrics pneumàtics i programables a secundària:
• AUTOMATITZACIÓ AMB TÈCNICA ELÈCTRICA CABLADA. • AUTOMATITZACIÓ AMB TÈCNICA PNEUMÀTICA I
ELECTROPNEUMÀTICA. • AUTOMATITZACIÓ AMB TÈCNICA PROGRAMADA.
+ Exercicis sobre el tema.

Introducció a la pneumàtica i a la automatització.
41
2010
11.- Agraïments. Voldríem agrair l’ajut i la paciència que ens han sigut atorgades per poder realitzar aquest treball de recerca a: - Fernando Hernandez: per pensar amb nosaltres a l’hora de repartir el treball
d’automatització i per haver-nos ajudat amb els conceptes i l’organització del temps.
- Josep Lluís Medina: per haver-nos ajudat en la iniciació del tema en les sessions que vam realitzar a la UPC, per revisar el nostre treball quan ho necessitàvem i per la paciència que ha utilitzat a l’hora d’explicar-nos el que no enteníem.
- En general a tots els professors que han aportat una part del seu temps en
ajudar-nos a facilitar-nos la realització d’aquest treball.


















