INSTITUTO TECNOLÓGICO AUTÓNOMO DE MÉXICO
47
2008 ITAM 1 Laboratorio de Robótica Diseño Electrónico SSL Octavio Ponce Madrigal Jesús G. Rodríguez Ordoñez Profr: Dr. Alfredo Weitzenfeld Ridel INSTITUTO TECNOLÓGICO AUTÓNOMO DE MÉXICO
description
INSTITUTO TECNOLÓGICO AUTÓNOMO DE MÉXICO. Laboratorio de Robótica Diseño Electrónico SSL Octavio Ponce Madrigal Jesús G. Rodríguez Ordoñez Profr: Dr. Alfredo Weitzenfeld Ridel. Agenda. Introducción Diseño Electrónico Suministro de energía Módulo Digital Módulo Analógico DSP - PowerPoint PPT Presentation
Transcript of INSTITUTO TECNOLÓGICO AUTÓNOMO DE MÉXICO

2008 ITAM 1
Laboratorio de Robótica
Diseño Electrónico SSL
Octavio Ponce MadrigalJesús G. Rodríguez Ordoñez
Profr: Dr. Alfredo Weitzenfeld Ridel
INSTITUTO TECNOLÓGICO AUTÓNOMO DE MÉXICO

2008 ITAM 2
Agenda
Introducción Diseño Electrónico
Suministro de energía Módulo Digital Módulo Analógico DSP
Software para diseño electrónico

2008 ITAM 3
Arquitectura de un equipo SSL
Sistema de Inteligencia Artificial
Módulo de Comunicación
Control del Árbitro
Sistema de Visión
Señal de Video #1
Señal de Video #2
Posiciones de los Robots y Pelota
Señales del Árbitro
Comandos a los Robots
RobotMódulo de
Comunicación
Electrónica
Mecánica

2008 ITAM 4
Funcionalidad Básica
Recibir la información enviada por IA, procesarla y ejecutarla.
Desplazarse dentro de la cancha. “Patear” la pelota para enviar pases y
marcar goles. “Controlar” la pelota, de modo que se
puedan desplazar sin perderla. Bloquear tiros del equipo contrario para
evitar pases y goles.
15 cm
18 cm
2008 ITAM 5
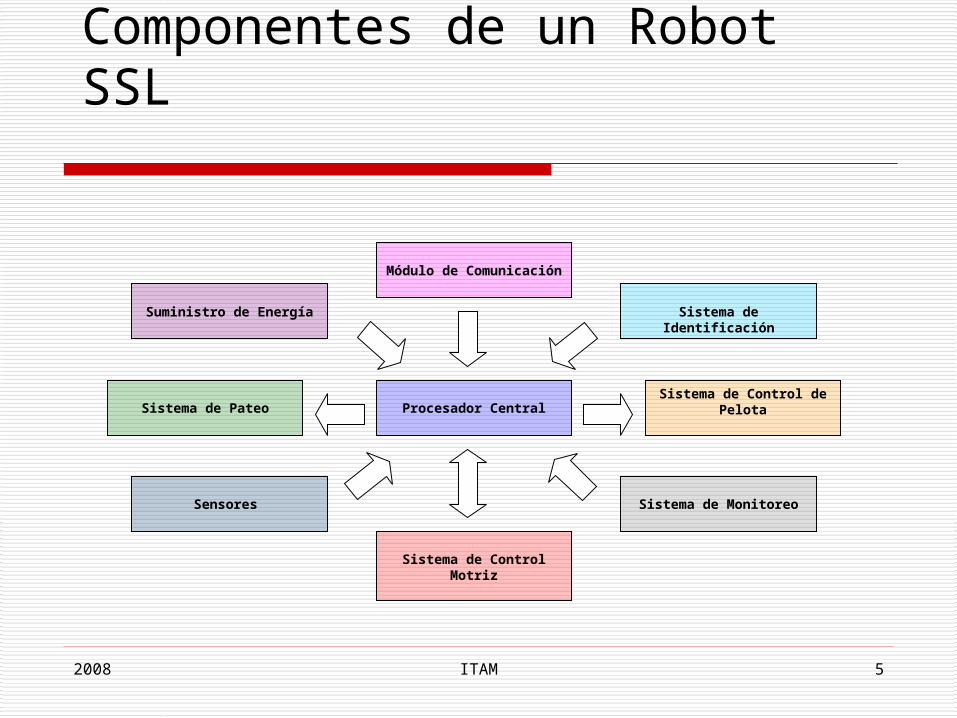
Componentes de un Robot SSL
Procesador Central
Módulo de Comunicación
Sistema de PateoSistema de Control de
Pelota
Sistema de Control Motriz
Sistema de Identificación
Suministro de Energía
Sensores Sistema de Monitoreo

2008 ITAM 6
Arquitectura de un Robot SSL
Procesador Digital de Señales (DSP)
Controladores de Motores
Módulo de Comunicación(Transceiver)
Controlador de Pelota (Dribbler)
Controlador de Carga
Identificador del Robot
Sensor de Pelota
El transceiver recibe la información de IA y la entrega
al DSP.
El DSP procesa la información y ejecuta las instrucciones enviando señales a otros
circuitos.
El DSP obtiene el número identificador del robot.
Los circuitos reciben señales lógicas y envían señales eléctricas a los
actuadotes.
Motores Solenoide Motor
Controlador de Descarga
Encoders
Capacitores
Los actuadotes reciben señales eléctricas que se
traducen en alguna acción del robot

2008 ITAM 7
Módulos Electrónica

2008 ITAM 8
Tarjetas Electrónicas

2008 ITAM 9
SUMINISTRO DE ENERGÍA
Alimentar de voltaje y corriente al robot.
Suministro analógica Suministro digital Medidores de baterías

2008 ITAM 10
SUMINISTRO ANALÓGICO
La parte analógica se alimenta con un voltaje de 16 volts provenientes de un arreglo de 6 baterías de 8 volts.

2008 ITAM 11
SUMINISTRO DIGITAL La parte digital se alimenta con un voltaje
de 8 volts provenientes de un arreglo de 3 baterías de 8 volts.

2008 ITAM 12
Medidor de Baterías Analógico
Tres “leds” indicadores. Led verde: voltaje > 16 volts Led amarillo: 14.8 <voltaje<16 Led rojo: voltaje < 14.8 volts
SI A < BA
B
“1” lógico

2008 ITAM 13
Medidor de Baterías Analógico
El comparador funciona con voltajes entre [0,5] volts. Por lo tanto usamos un divisor de voltaje:
VinRR
RVout
21
2
)5(5.2
21
2 VRR
RV
)16(5.221
2 VRR
RV
)8.14(5.221
2 VRR
RV
R1= R2
(5/27)*R1=R2
(25/123)*R1=R2
R1
R2
Vin Vout

2008 ITAM 14
Medidor de Baterías Analógico

2008 ITAM 15
Medidor de Baterías Digital
Led verde: voltaje > 8 volts Led amarillo: 7.4 <voltaje<8 Led rojo: voltaje < 7.4 volts
)5(5.221
2 VRR
RV
R1= R2
(5/11)*R1=R2
(25/49)*R1=R2
)8(5.221
2 VRR
RV
)4.7(5.221
2 VRR
RV

2008 ITAM 16
Tarjeta Suministro de Energía

2008 ITAM 17
Módulo Digital
Circuitos lógicos para la identificación, comunicación y sensado del robot.
ID Robot Transceiver Sensores de pelota

2008 ITAM 18
IDENTIFICADOR DEL ROBOT Identificar el robot mediante un
Switch ID y un Display de 7 segmentos.
Un Switch que manda una señal lógica de 4 bits al DSP, el cual decodifica para obtener el ID. El DSP manda la misma señala un Driver que controlara cada uno de los segmentos del display.

2008 ITAM 19
IDENTIFICADOR DEL ROBOT

2008 ITAM 20
TRANSCEIVER
Recibir los comandos de IA
Bloque Dispositivo Cantidad de información
Control Control de pelota (Cpel) 1 bit
Pateo de pelota (Ppel) 1 bit
Dirección motor1 (DM1) 1 bit
Dirección motor2 (DM2) 1 bit
Dirección motorN (DMN) 1 bit
Velocidades Velocidad motor1 8 bits
Velocidad motor2 8 bits
Velocidad motorN 8 bits
Estructura del paquete de información para un robot.

2008 ITAM 21
TRANSCEIVER
T = 5N + 6 [bytes]
Donde: T=tamaño de la tramaN=número de motores
Control Robot1 Robot2 Robot3 Robot4 Robot5
1 byte P bytes P bytes P bytes P bytes P bytes
Estructura de la trama del módulo de comunicación.

2008 ITAM 22
TRANSCEIVER
Radiometrix (RPC-914/869-64) Frecuencias de 914MHz o 869MHz

2008 ITAM 23
TRANSCEIVER

2008 ITAM 24
CONTROL DE MOTORES
Circuito Integrado L6207D
Entradas Función
EN = Vcc DIR1=Vcc,DIR2=GND
Adelante
DIR1=GND,DIR2=Vcc
Atrás
EN = GND DIR1=X,DIR2=X
Detenido
X=Cualquier valor, Vcc o GNDVoltajes para el funcionamiento de los motores

2008 ITAM 25
CONTROL DE MOTORES

2008 ITAM 26
Acoplamiento Evitar daños al DSP. El acoplamiento se hace con un led
infrarrojo y un fototransistor. Cuando el LED emite luz, ilumina el
fototransistor y éste conduce. La corriente de salida es proporcional
a la corriente de entrada. La entrada y la salida están 100%
aisladas.

2008 ITAM 27
Optoacoplador

2008 ITAM 28
Señales PWM Un motor puede controlarse mediante la
disminución del voltaje aplicado al rotor. Hay dos problemas con este enfoque.
Para solucionar este problema se utiliza la Modulación por Ancho de Pulso (PWM Pulse Width Modulation).
Es una técnica en la que se modifica el ciclo de trabajo de una señal periódica (generalmente cuadrada).

2008 ITAM 29
Señales PWM
Ciclo de trabajo 20%
Ciclo de trabajo 50%
Ciclo de trabajo 80%

2008 ITAM 30
Señales PWM
En lugar de aplicar al motor un voltaje reducido en 50%, se aplica el voltaje máximo, pero sólo la mitad de las veces.
El efecto total es una serie de aceleraciones y desaceleraciones, que producen un efecto similar a la reducción del voltaje aplicado.

2008 ITAM 31
Señales PWM

2008 ITAM 32
Diagrama Lógico TarjetaDigital-Analógica

2008 ITAM 33
PCB Tarjeta Digital-Analógica

2008 ITAM 34
“Pateo” de la pelota
Encontrar un dispositivo lo suficientemente pequeño para que
quepa en el robot y lo suficientemente poderoso para que la pelota salga impulsada con fuerza.
Se ha generalizado el uso de un solenoide

2008 ITAM 35
Solenoide
Cuando la corriente fluye por la bobina, las líneas de fuerza salen por uno de sus extremos y entran por el extremo opuesto.

2008 ITAM 36
Solenoide
esas líneas de fuerza se aprovechan para que un núcleo ferromagnético sea impulsado con fuerza para que el robot pueda lanzar la pelota.

2008 ITAM 37
Componentes del Kicker
Requiere una gran cantidad de voltaje y corriente eléctrica.
Necesita de un circuito permita almacenar carga y permita disponer de ella cuando sea necesario patear la pelota.

2008 ITAM 38
Componentes del Kicker

2008 ITAM 39
Generador de alto voltaje
DC-DC Voltaje de entrada de 16V (DC), lo
eleva a 110V (DC). Mientras este encendido sigue
convirtiendo (se acaban las baterías) Se necesita un interruptor: “Relay” Relay = interruptor electromagnético

2008 ITAM 40
Capacitores
El voltaje generado se almacena en un par de capacitores (2200μF y 200 V) conectados en paralelo.
La carga permanece almacenada para que cuando se requiera, se descarguen y accionen el solenoide.

2008 ITAM 41
Descarga
El voltaje de los capacitores se envía al solenoide.
Es importante que el robot tenga la pelota al momento de la descarga y no se desperdicie energía
Dos etapas: Sensado y activación.

2008 ITAM 42
Descarga
Sensado: Se utilizó un diodo emisor de luz infrarroja y un fototransistor.
Activación: La activación del sistema de pateo se realiza por software.

2008 ITAM 43
Control electrónico de intensidad de la corriente de descarga, por medio de un MOSFET

2008 ITAM 44
Tarjeta del Kicker

2008 ITAM 45
Dribbler
Hacer desplazamientos manteniendo la pelota en su poder.
Un motor hace girar un rodillo de algún material que brinde adherencia a la pelota.

2008 ITAM 46
Procesamiento en el Robot
La unidad central de procesamiento del robot es la encargada de recibir el paquete del módulo de comunicación inalámbrica y que, de acuerdo con un
programa residente en la memoria del mismo, interpreta los comandos
de IA para enviar señales a los circuitos del robot para ejecutar
alguna acción.

2008 ITAM 47
DSP
A partir de la generación de robots EK2004 se ha utilizado un Procesador Digital de Señales (DSP).
Procesa señales en tiempo real. Ideal para aplicaciones que no toleran
el retardo. eZdsp LF2407 Espectrum Digital, Inc. DSP Texas Instrument TMS320F2812