
Instituto Tecnológico de Querétaro Departamento de ... de... · Fig. 2.1 Respuesta de un sistema...
28
Instituto Tecnológico de Querétaro Departamento de Ingeniería Eléctrica y Electrónica Guía de Prácticas de Laboratorio Materia: Control I Laboratorio de Ingeniería Eléctrica “Adolfo Equihua Tapia” Santiago de Querétaro, Qro. Junio 2012 Elaboró Ing. Francisco Ortega Osorio Editora Dulce María de Guadalupe Ventura Ovalle Departamento de Ingeniería Eléctrica y Electrónica Av. Tecnológico S/N, Esq. M. Escobedo, Col. Centro, CP.76000 Tel: 2274400 ext. 4418
Transcript of Instituto Tecnológico de Querétaro Departamento de ... de... · Fig. 2.1 Respuesta de un sistema...
Instituto Tecnológico de Querétaro
Departamento de Ingeniería Eléctrica
y Electrónica
Guía de Prácticas de Laboratorio
Materia: Control I
Laboratorio de Ingeniería Eléctrica
“Adolfo Equihua Tapia”
Santiago de Querétaro, Qro. Junio 2012
Elaboró
Ing. Francisco Ortega Osorio
Editora
Dulce María de Guadalupe Ventura Ovalle
Departamento de Ingeniería Eléctrica y Electrónica
Av. Tecnológico S/N, Esq. M. Escobedo, Col. Centro,
CP.76000 Tel: 2274400 ext. 4418

CONTENIDO
PRÁCTICA No. 1. NOMBRE .................................................................................................................. 4
1. OBJETIVO ................................................................................................................................. 4
2. INTRODUCCIÓN ....................................................................................................................... 4
3. MARCO TEÓRICO ..................................................................................................................... 4
4. EQUIPO Y MATERIALES ............................................................................................................ 4
5. METODOLOGÍA ........................................................................................................................ 4
PRÁCTICA No. 2. SIMULACIÓN DE UN SISTEMA DE PRIMER ORDEN CON CARGA RESISTIVA-
INDUCTIVA .......................................................................................................................................... 6
1. OBJETIVO ................................................................................................................................. 6
2. INTRODUCCIÓN ....................................................................................................................... 6
3. MARCO TEÓRICO ..................................................................................................................... 6
4. EQUIPO Y MATERIALES ............................................................................................................ 7
5. METODOLOGÍA ........................................................................................................................ 7
PRÁCTICA No. 3. SISTEMAS DE PRIMER ORDEN CON CARGA RESISTIVA-CAPACITIVA ...................... 8
1. OBJETIVO ................................................................................................................................. 8
2. INTRODUCCIÓN ....................................................................................................................... 8
3. MARCO TEÓRICO ..................................................................................................................... 8
4. EQUIPO Y MATERIALES .......................................................................................................... 12
5. METODOLOGÍA ...................................................................................................................... 12
PRÁCTICA No. 4. FUNCIONES DE SEGUNDO ORDEN ....................................................................... 14
1. OBJETIVO ............................................................................................................................... 14
2. INTRODUCCIÓN ..................................................................................................................... 14
3. MARCO TEÓRICO ................................................................................................................... 14
4. EQUIPO Y MATERIALES .......................................................................................................... 16
5. METODOLOGÍA ...................................................................................................................... 16
PRÁCTICA No. 5. ERRORES EN ESTADO ESTABLE .............................................................................. 18
1. OBJETIVO ............................................................................................................................... 18
2. INTRODUCCIÓN ..................................................................................................................... 18
3. MARCO TEÓRICO ................................................................................................................... 18
4. EQUIPO Y MATERIALES .......................................................................................................... 22

5. METODOLOGÍA ...................................................................................................................... 22
PRÁCTICA No.6. CONTROLADOR PID ............................................................................................... 24
1. OBJETIVO ............................................................................................................................... 24
2. INTRODUCCIÓN ..................................................................................................................... 24
3. MARCO TEÓRICO ................................................................................................................... 24
4. EQUIPO Y MATERIALES .......................................................................................................... 26
5. METODOLOGÍA ...................................................................................................................... 26

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 1.
Página 4 de 28
PRÁCTICA No. 1. NOMBRE
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO Desarrollo de un sistema de retroalimentación y para observar su comportamiento
2. INTRODUCCIÓN
3. MARCO TEÓRICO
Los sistemas de control realimentados se llaman de lazo cerrado. El lazo cerrado funciona
de tal manera que hace que el sistema se realimente, la salida vuelve al principio para
analizar la diferencia y en una segunda opción ajuste más, así hasta que el error es 0.
Cualquier concepto básico que tenga como naturaleza una cantidad controlada como por
ejemplo temperatura, velocidad, presión, caudal, fuerza, posición, etc. son parámetros de
control de lazo cerrado.
4. EQUIPO Y MATERIALES
Horno
Serpentín de cobre
Termómetro
Cronometro
Agua
Recipiente contenedor
Llave de paso
Manguera
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Colocar la manguera dentro del horno.
5.1.2 Hacer circular agua atreves de la manguera (Fig. 1.1).
5.1.3 Dejarla por aproximadamente 3 minutos y tomar la temperatura.
5.1.4 Hacer circular nuevamente esta agua, esperar 3 minutos y tomar la temperatura.
5.1.5 Repetir este procedimiento 5 veces.
5.1.6 Hacer anotaciones de la temperatura y llenar la Tabla 1.1.

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 1.
Página 5 de 28
5.2 Diagramas o dibujos
Fig. 1.1. Sistema Retroalimentado
5.3 Tablas
Temperatura Tiempo
°C minutos
°C minutos
°C minutos
°C minutos
°C minutos
°C minutos
Tabla 1.1
5.4 Precauciones y/o Notas

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 2
Página 6 de 28
PRÁCTICA No. 2. SIMULACIÓN DE UN SISTEMA DE
PRIMER ORDEN CON CARGA RESISTIVA- INDUCTIVA
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO En la presente práctica el alumno hará la simulación de un sistema de primer orden utilizando dos
resistencias y un inductor, obteniendo tanto la función de transferencia del sistema como la gráfica
del osciloscopio.
2. INTRODUCCIÓN
3. MARCO TEÓRICO
Un sistema de primer orden se caracteriza por contener un elemento capaz de almacenar
energía representándose por una ecuación diferencial de primer orden. La respuesta dinámica de un sistema se puede representar en términos de la siguiente Fig.
1, donde u(t) es una función variable de entrada, y(t) es la respuesta del sistema.
Fig. 2.1 Respuesta de un sistema en presencia de una perturbación de entrada
La respuesta dinámica de un sistema se puede representar mediante una ecuación
diferencial lineal de primer orden.
𝜏𝑑𝑦
𝑑𝑡+ 𝑦 = 𝐾𝑢(𝑡)
Donde K es la ganancia de lazo abierto del sistema y 𝜏 la constante de tiempo a lazo
abierto.
La relación entrada-salida se obtiene mediante:

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 2
Página 7 de 28
𝐶(𝑠)
𝑅(𝑠)=
1
𝑇𝑠 + 1
4. EQUIPO Y MATERIALES
Resistencias (previamente seleccionado por el alumnos)
Fuente de voltaje
Inductor de 0.01 H
Osciloscopio
Multímetro Programa de simulación.
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Obtener la función de transferencia
5.1.2 Armar el circuito.
5.1.3 Simular el circuito.
5.1.4 Obtener la respuesta en el osciloscopio.
5.2 Diagramas o dibujos
Fig. 2.1. Circuito
5.3 Tablas
5.4 Precauciones y/o Notas
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 8 de 28
PRÁCTICA No. 3. SISTEMAS DE PRIMER ORDEN CON
CARGA RESISTIVA-CAPACITIVA
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO De un sistema RC obtener la función de transferencia y su comportamiento. Hacer uso de
programas de simulación.
2. INTRODUCCIÓN
3. MARCO TEÓRICO
SISTEMAS LINEALES DE PRIMER ORDEN (DOMINIO TIEMPO)
Un sistema lineal de primer orden con una variable de entrada," x(t)", y una variable salida,
"y(t)" se modela matemáticamente con una ecuación que en función de parámetros de
significado dinámico se escribe en la siguiente forma:
Siendo, 𝜏 una constante de tiempo y K la ganancia en estado estacionario del sistema. Estos
dos parámetros se calculan con ecuaciones en función de características físicas del sistema.
La constante de tiempo expresa un atraso dinámico y la ganancia es el cambio último en la
variable de salida con respecto al cambio último en la variable de entrada.
La ecuación (3.1) se escribe, usualmente, en términos de las variables desviación con
respecto a sus valores en el estado inicial, es decir en la forma estándar para análisis
dinámico o de sistemas de control:
Siendo
𝑌(𝑡) = 𝑦(𝑡) − 𝑦(0)
𝑋(𝑡) = 𝑥(𝑡) − 𝑥(0)
𝜏𝑑𝑦(𝑡)
𝑑𝑡+ 𝑦 (3.1)
𝜏𝑑𝑌(𝑡)
𝑑𝑡+ 𝑌(𝑡) = 𝐾𝑋(𝑡) (3.2)
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 9 de 28
La ecuación (3.2) es diferencial lineal de primer orden cuya solución se puede hallar
mediante un factor integrante que para este caso es igual a . 𝑒𝑥𝑝 (∫𝑑𝑡
𝜏) = exp (
𝑡
𝜏)
Al multiplicar la ecuación (3.2) por este factor, resulta fácilmente integrable y evaluando la
solución general obtenida para las condiciones iniciales de las variables de entrada y salida
se encuentra la solución correspondiente. A continuación se desarrollan las respuestas paso,
rampa y seno de un sistema lineal de primer orden.
RESPUESTA PASO DE UN SISTEMA DE PRIMER ORDEN
Al considerar que en la ecuación diferencial (3.2), la variable de entrada es perturbada con
un cambio paso constante, es decir que X (t) = Δx , entonces se puede escribir que:
Al resolver la ecuación (3.3) se obtiene como solución la siguiente respuesta para Y(t):
La ecuación (3.4) se obtiene aplicando el factor integrante a (3.3) y una integración
indefinida da como solución general
Evaluando la ecuación (3.5) para la condición inicial Y(0) = 0 , se obtiene que el valor de la
constante de integración es A = −KΔx 1 y, con ello, la solución dada por (3.4) La Figura
2.1 muestra el perfil gráfico correspondiente a la respuesta (3.4). La expresión exponencial
permite describir al comportamiento de un sistema de primer orden ante un cambio paso
constante en su variable de entrada como una respuesta monotónica estable porque alcanza
un valor último constante. A partir de las ecuaciones (3.3) y (3.4) se pueden deducir
algunas características acerca de las propiedades dinámicas de un sistema de primer orden
así:
𝜏𝑑𝑌(𝑡)
𝑑𝑡+ 𝑌(𝑡) = 𝐾∆𝑥 (3.3)
𝑌(𝑡) = 𝐾∆𝑥 [1 − 𝑒𝑥𝑝 (−𝑡
𝜏)] (3.4)
𝑌(𝑡) = 𝐾∆𝑥 + 𝐴1𝑒𝑥𝑝 (−𝑡
𝜏) (3.5)
𝑌(𝑡)|ú𝑙𝑡𝑖𝑚𝑜 = 𝐾∆𝑥 (3.6)

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 10 de 28
Ganancia en estado estacionario, K: Expresa el cambio último en la variable de salida o
respuesta del sistema para un determinado cambio paso en la variable de entrada, es decir,
que en su último estado el sistema se ha estabilizado porque su respuesta se mantiene
constante, es decir, la derivada de su variable de salida se hace igual a cero.
Al considerar esto en la ecuación (3.3) se deduce la ecuación (3.6)
Fig. 3.1. Respuesta Paso de un Sistema de Primer Orden (K=3; 𝜏=1, ∆𝑥=2)
FUNCION DE TRANSFERENCIA
Una función de transferencia es un modelo matemático que a través de un cociente
relaciona la respuesta de un sistema (modelada) a una señal de entrada o excitación
(también modelada).
El pico formado por los modelos de la señal de salida respecto de la señal de entrada,
permite encontrar los ceros y los polos, respectivamente. Y que representan las raíces en las
que cada uno de los modelos del cociente se iguala a cero. Es decir, representa la región
frontera a la que no debe llegar ya sea la respuesta del sistema o la excitación al mismo; ya
que de lo contrario llegará ya sea a la región nula o se irá al infinito, respectivamente.
Considerando la temporalidad; es decir, que la excitación al sistema tarda un tiempo en
generar sus efectos en el sistema en cuestión y que éste tarda otro tiempo en dar respuesta.
Esta condición es vista a través de un proceso de convolución, formado por la excitación de
entrada convolucionada con el sistema considerado, dando como resultado, la respuesta
dentro de un intervalo de tiempo. Ahora, en ese sentido (el de la convolución), se tiene que
observar que la función de transferencia está formada por la deconvolución entre la señal de

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 11 de 28
entrada con el sistema. Dando como resultado la descripción externa de la operación del
sistema considerado.
De forma que el proceso de contar con la función de transferencia del sistema a través de la
deconvolución, se logra de forma matricial o vectorial, considerando la pseudoinversa de la
matriz o vector de entrada multiplicado por el vector de salida, para describir el
comportamiento del sistema dentro de un intervalo dado. Pareciera un proceso complicado,
aunque solo baste ver que la convolución discreta es representada por un producto de un
vector o matriz fija respecto de una matriz o vector móvil, o que en forma tradicional se
observa como una sumatoria.
Uno de los primeros matemáticos en describir estos modelos fue Laplace, a través de su
transformación matemática.
Por definición una función de transferencia se puede determinar según la expresión:
donde H (s) es la función de transferencia (también notada como G (s) ); Y (s) es la
transformada de Laplace de la respuesta y U (s) es la transformada de Laplace de la señal
de entrada.
La función de transferencia también puede considerarse como la respuesta de un sistema
inicialmente inerte a un impulso como señal de entrada:
La salida o respuesta en frecuencia del sistema se halla entonces de
y la respuesta como función del tiempo se halla con la transformada de Laplace inversa de
Y(s):
𝐻(𝑠) =𝑌(𝑠)
𝑈(𝑠) (3.7)
𝐻(𝑠) = ℒ{ℎ(𝑡)} = ∫ 𝑒−𝑠𝑡ℎ(𝑡)𝑑𝑡∞
0
(3.8)
𝑌(𝑠) = 𝐺(𝑠)𝑈(𝑠) (3.9)
𝑦(𝑡) = 𝐿−1[𝑌(𝑠)] (3.10)
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 12 de 28
Cualquier sistema físico (mecánico, eléctrico, etc.) se puede traducir a una serie de valores
matemáticos a través de los cuales se conoce el comportamiento de estos sistemas frente a
valores concretos.
Por ejemplo, en análisis de circuitos eléctricos, la función de transferencia se representa
como:
4. EQUIPO Y MATERIALES
Resistencias (calculados previamente por el alumno)
Capacitor
Protoboard.
Fuente digital.
Osciloscopio y sonda.
Puntas mixtas.
Alambre para hacer las conexiones correspondientes.
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Obtener la función de transferencia del circuito.
5.1.2 Sustituir los valores de las resistencias y capacitores para obtener el orden del
sistema.
5.1.3 Obtener los valores de los coeficientes de la ecuación para hacer el sistema
simulado y graficar la función para observar la respuesta del sistema.
5.1.4 Armar el circuito en la protoboard.
5.1.5 Hacer la medición con el osciloscopio para comprobar el resultado obtenido en el
programa de simulación de la función de transferencia (respuesta del sistema).
5.1.6 Comprobar resultados obtenidos.
5.2 Diagramas o dibujos
𝐻(𝑠) =𝑉𝑜𝑢𝑡
𝑉𝑖𝑛 (3.11)

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 3.
Página 13 de 28
Fig. 3.1. Circuito
5.3 Tablas
5.4 Precauciones y/o Notas
Los programas recomendados para hacer las simulaciones es el MULTISIM y el
MATLAB.

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4.
Página 14 de 28
PRÁCTICA No. 4. FUNCIONES DE SEGUNDO ORDEN
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO De un sistema RLC obtener la función de transferencia y su comportamiento. Hacer uso de
programas de simulación.
2. INTRODUCCIÓN
3. MARCO TEÓRICO Un sistema es de segundo orden si presenta la siguiente función de transferencia:
𝐶(𝑠)
𝑅(𝑠)=
𝐾
𝐴𝑠2 + 𝐵𝑠 + 𝑐
Por razones de conveniencia la función de transferencia se puede rescribir como:
𝐶(𝑠)
𝑅(𝑠)=
𝜔𝑛2
𝑠2 + 2𝜁𝜔𝑛𝑠 + 𝜔𝑛2
Donde:
𝐾
𝐴= 𝜔𝑛
2
𝜁 =𝐵
2√𝐴𝐾
El comportamiento dinámico del sistema de segundo orden se puede escribir en términos de 2
parámetros ζ y ωn. Si 0 < ζ < 1, se dice que el sistema es subamortiguado y la respuesta transitoria
presenta sobreimpulsos. La respuesta en el tiempo ante una función escalón unitario se describe con
la siguiente ecuación matemática:
𝑐(𝑡) = 1 −𝑒−𝜁𝜔𝑛𝑡
√1−𝜁2 𝑠𝑒𝑛(𝜔𝑑𝑡 + 𝑎𝑟𝑐𝑐𝑜𝑠𝜁) (𝑡 ≥ 0)
Donde:
𝜔𝑑 = 𝜔𝑛√1 − 𝜁2 Para sistemas con amortiguamiento cero, las oscilaciones se hacen no amortiguadas y las
oscilaciones son continuas:
𝑐(𝑡) = 1 − 𝑐𝑜𝑠𝜔𝑛𝑡 (𝑡 ≥ 0) Si la razón de amortiguamiento es igual a uno, se dice que el sistema está críticamente amortiguado,
la ecuación matemática que define su comportamiento es:
𝑐(𝑡) = 1 − 𝑒−𝜔𝑛𝑡 (1 + 𝜔𝑛𝑡 ) (𝑡 ≥ 0)

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4.
Página 15 de 28
El caso para el cual la razón de amortiguamiento es mayor que 1, la respuesta en el tiempo ante un
escalón unitario puede escribirse como:
𝑐(𝑡) = 1 − 𝑒−(𝜁−√1−𝜁2)𝜔𝑛𝑡 La respuesta transitoria de un sistema de control práctico con frecuencia presenta oscilaciones
amortiguadas antes de alcanzar el estado estacionario. Al especificar la respuesta transitoria de un
sistema de control a una entrada de escalón unitario, es común especificar lo siguiente:
1. Tiempo de retardo, td.
2. Tiempo de crecimiento, tr.
3. Tiempo pico, tp.
4. Sobreimpulso máximo, Mp.
5. Tiempo de establecimiento, ts
Fig. 4.1. Gráfica de un sistema de segundo orden
A partir de estos parámetros se puede determinar la respuesta en el tiempo y en la frecuencia, así:
𝑡𝑟 =1
𝜔𝑑arctan (−
√1 − 𝜁2
𝜁)
tp =π
ωd
𝑡𝑠 =4
𝜁𝜔𝑛
𝜔𝑑 = 𝜔𝑛√1 − 𝜁2
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4.
Página 16 de 28
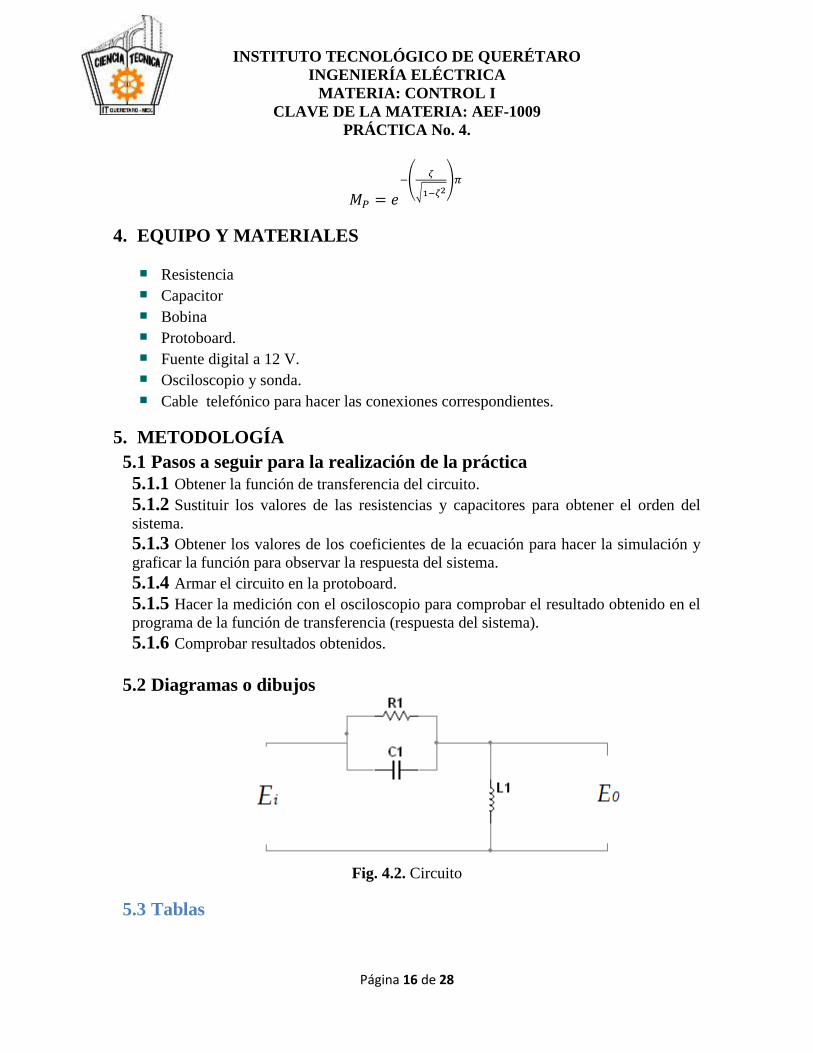
𝑀𝑃 = 𝑒
−(𝜁
√1−𝜁2)𝜋
4. EQUIPO Y MATERIALES
Resistencia
Capacitor
Bobina
Protoboard.
Fuente digital a 12 V.
Osciloscopio y sonda.
Cable telefónico para hacer las conexiones correspondientes.
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Obtener la función de transferencia del circuito.
5.1.2 Sustituir los valores de las resistencias y capacitores para obtener el orden del
sistema.
5.1.3 Obtener los valores de los coeficientes de la ecuación para hacer la simulación y
graficar la función para observar la respuesta del sistema.
5.1.4 Armar el circuito en la protoboard.
5.1.5 Hacer la medición con el osciloscopio para comprobar el resultado obtenido en el
programa de la función de transferencia (respuesta del sistema).
5.1.6 Comprobar resultados obtenidos.
5.2 Diagramas o dibujos
Fig. 4.2. Circuito
5.3 Tablas
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 4.
Página 17 de 28
5.4 Precauciones y/o Notas
Los programas recomendados para hacer las simulaciones es el MULTISIM y el
MATLAB.
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 18 de 28
PRÁCTICA No. 5. ERRORES EN ESTADO ESTABLE
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO Obtener el error en estado estable de un sistema de control en estado estacionario haciendo uso de la
herramienta de MATLAB SIMULINK.
2. INTRODUCCIÓN
3. MARCO TEÓRICO
ERRORES EN ESTADO ESTABLE
Una característica importante de funcionamiento de los sistemas de control en estado
estable, se refiere al error que presentan dichos sistemas en régimen permanente. Este error
es una medida de la precisión de un sistema de control.
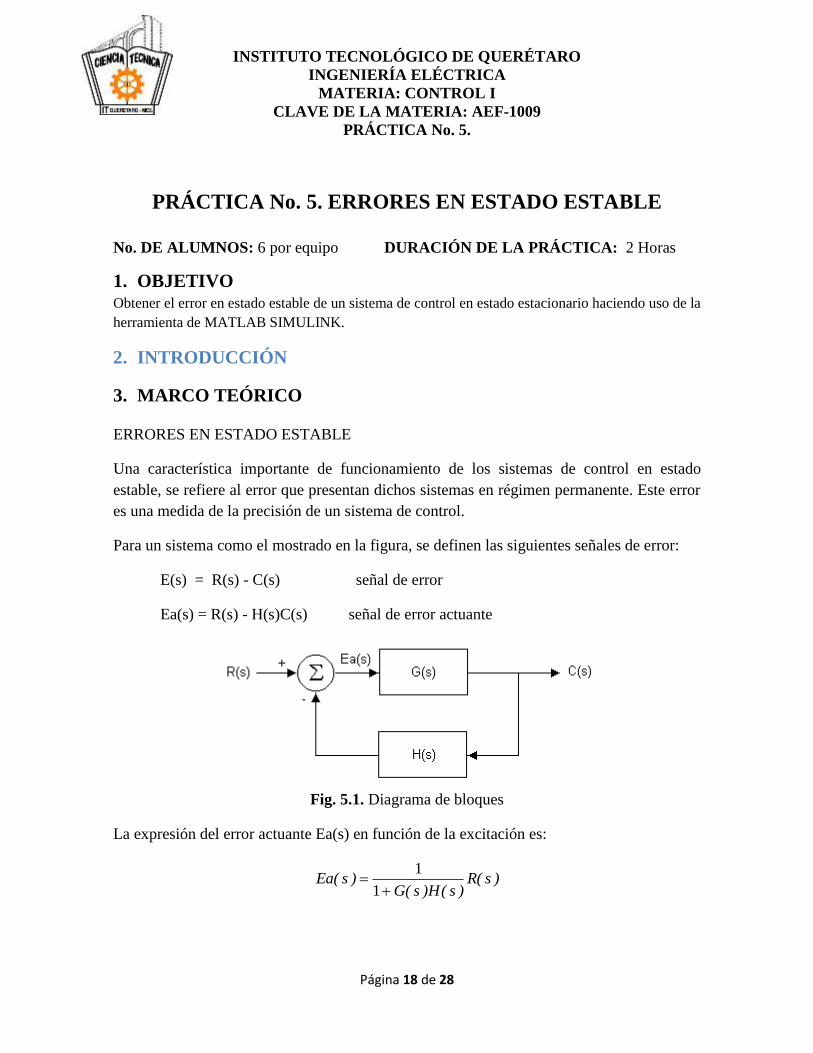
Para un sistema como el mostrado en la figura, se definen las siguientes señales de error:
E(s) = R(s) - C(s) señal de error
Ea(s) = R(s) - H(s)C(s) señal de error actuante
Fig. 5.1. Diagrama de bloques
La expresión del error actuante Ea(s) en función de la excitación es:
)s(R)s(H)s(G
)s(Ea
1
1

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 19 de 28
El error actuante del sistema en estado estacionario eass, se define como el valor del error
actuante ea(t) cuando la respuesta ha adquirido su valor estacionario, esto es:
Cuando H(s) = 1, el error es igual al error actuante. El error depende tanto de G(s)·H(s)
como de la señal de prueba R(s).
Otra forma de medir el error en estado estacionario para sistemas realimentados es a partir
de los coeficientes de error estático que se definen en base al tipo de sistema definido como
el valor de N, para N = 0,1,2,... de la función de transferencia de lazo abierto G(s)·H(s).
Sea la función de transferencia de lazo abierto:
Donde el tipo de sistema está dado por el valor de N para N = 0, 1, 2, ...
Ejemplo
Sistema tipo 0 Sistema tipo 1 Sistema tipo 2 1
𝑠 + 1
1
𝑠(𝑠 + 1)
1
𝑠2(𝑠 + 1)
El coeficiente estático de error de posición Kp se determina con una señal de entrada
escalón r(t) = P.u(t), y está definido por:
Luego el error de posición ep es:
)s(E slim)t(elime as
at
ass0
)s(R)s(H)s(G
s limes
ass
1
1
0
)sbsbb(s
sasaa)s(H)s(G
r
r
N
m
m
10
10
)s(H)s(GlimKps 0
Kp
Pee assp
1

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 20 de 28
Su expresión en tanto por uno se obtiene directamente cuando P=1, entonces:
El coeficiente estático de error de velocidad Kv se determina con una señal de entrada
rampa r(t) = V.t.u(t), y está definido por:
Luego el error de velocidad ev es:
de manera semejante a ep , y en tanto por uno:
De manera similar el coeficiente estático de error de aceleración Ka se determina con una
señal de entrada parábola r(t) = 1
2a.t2.u(t), y está definido por:
Luego el error de aceleración ea es:
y e tanto por uno:
Kpe p
1
1
)s(H)s(G s limKvs 0
Kv
Vee assv
Kvev
1
)s(H)s(Gs limKa 2
s 0
Ka
aea
Kaea
1

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 21 de 28
La tabla I resume los errores estacionarios para sistemas tipo 0, 1 y 2 sometidos a entradas
escalón, rampa y parábola, en función de los coeficientes estáticos de error:
ERROR
Tipo de sistema
POSICIÓN
eP
VELOCIDAD
ev
ACELERACIÓN
ea
0
1 0
2 0 0
Tabla 5.1. Error relativo en estado estable
Fig. 5.2. Gráfica del error al aplicar una entrada escalón en un sistema tipo 0.
Kp1
1
Kv
1
Ka
1

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 22 de 28
Fig. 5.3. Gráfica del error al aplicar una entrada rampa
4. EQUIPO Y MATERIALES
Simulink de MATLAB.
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
5.1.1 Calcular el error en estado estacionario para entradas escalón y rampa.
5.1.2 Abrir MATLAB y de ahí abrir el simulink dando clikc al siguiente botón:
5.1.3 Armar los circuitos Fig. 5.1 y Fig. 5.2. Para lograr esto se utiliza el
Simulink Library Browser (Navegador de librerías de Simulink) con el fin de obtener
cada componente del sistema a simular. De manera particular, la para la planta se utiliza
la función Zero-Pole de la librería Simulink Continuous. En la carpeta Sources obtener
las entras escalón y rampa (step, ramp). En la carpeta Commonly Used Blocks utilizar el
sumador (Sum) y el conector Mux.
5.1.4 Definir los parámetros del sistema en el Function Block Parameter, pulsando dos
veces la planta.
5.1.5 Para unir los elementos es necesario dar click en las terminales de los elementos y
una vez que se vea una cruz, arrastrar el mouse hasta el punto de conexión. Una flecha
aparecerá en ese instante.
5.1.6 El Scope obtendrá la gráfica cuando sea pulsado doble vez.
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 5.
Página 23 de 28
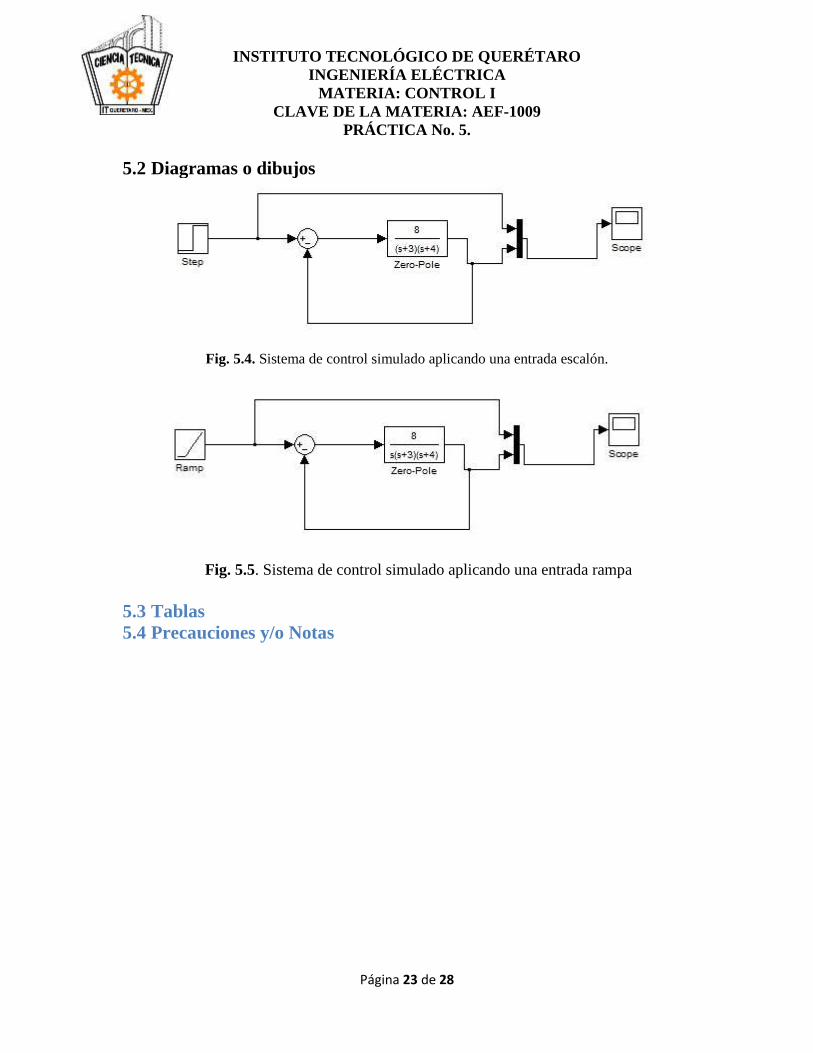
5.2 Diagramas o dibujos
Fig. 5.4. Sistema de control simulado aplicando una entrada escalón.
Fig. 5.5. Sistema de control simulado aplicando una entrada rampa
5.3 Tablas
5.4 Precauciones y/o Notas
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 24 de 28
PRÁCTICA No.6. CONTROLADOR PID
No. DE ALUMNOS: 6 por equipo DURACIÓN DE LA PRÁCTICA: 2 Horas
1. OBJETIVO Diseño de un sistema o un servomecanismo en el que se utilicen amplificadores operacionales para
lograr el control PID (Proporcional, Integrador, Derivativo) del sistema.
2. INTRODUCCIÓN
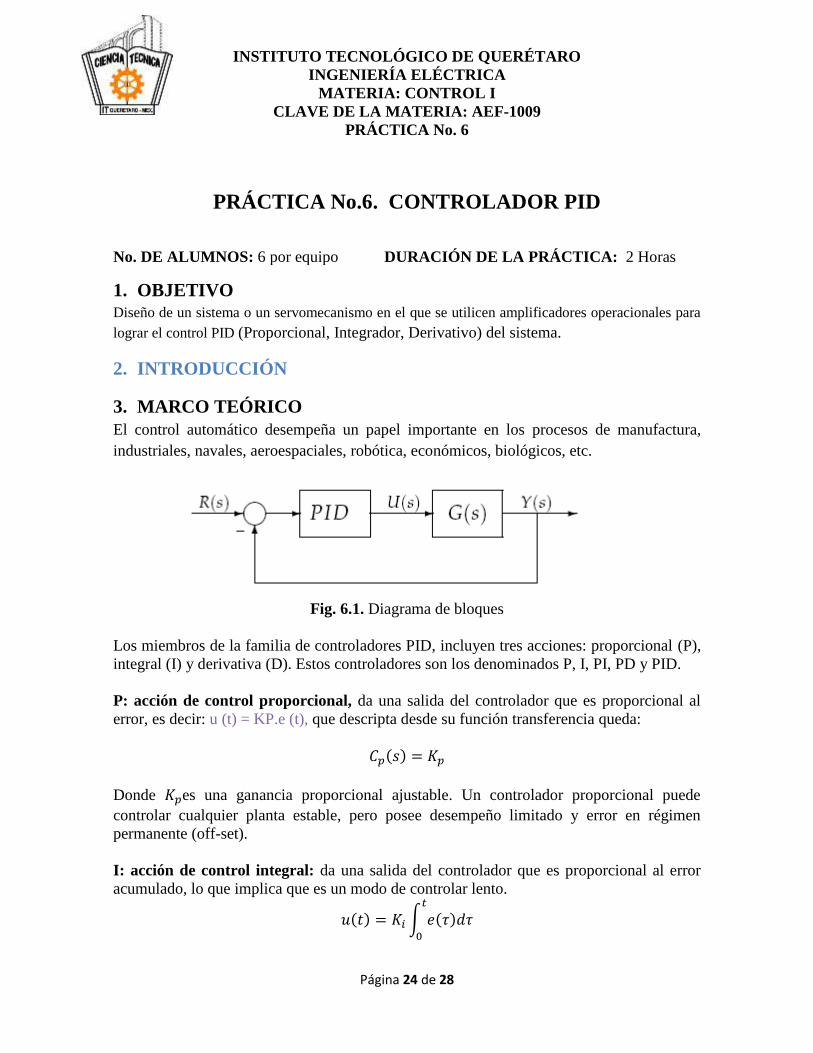
3. MARCO TEÓRICO El control automático desempeña un papel importante en los procesos de manufactura,
industriales, navales, aeroespaciales, robótica, económicos, biológicos, etc.
Fig. 6.1. Diagrama de bloques
Los miembros de la familia de controladores PID, incluyen tres acciones: proporcional (P),
integral (I) y derivativa (D). Estos controladores son los denominados P, I, PI, PD y PID.
P: acción de control proporcional, da una salida del controlador que es proporcional al
error, es decir: u (t) = KP.e (t), que descripta desde su función transferencia queda:
𝐶𝑝(𝑠) = 𝐾𝑝
Donde 𝐾𝑝es una ganancia proporcional ajustable. Un controlador proporcional puede
controlar cualquier planta estable, pero posee desempeño limitado y error en régimen
permanente (off-set).
I: acción de control integral: da una salida del controlador que es proporcional al error
acumulado, lo que implica que es un modo de controlar lento.
𝑢(𝑡) = 𝐾𝑖 ∫ 𝑒(𝜏)𝑑𝜏𝑡
0

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 25 de 28
𝐶𝑖(𝑠) =𝐾𝑖
𝑠
La señal de control u (t) tiene un valor diferente de cero cuando la señal de error e (t) es
cero. Por lo que se concluye que dada una referencia constante, o perturbaciones, el error en
régimen permanente es cero.
PI: acción de control proporcional-integral, se define mediante:
𝑢(𝑡) = 𝐾𝑃𝑒(𝑡) +𝐾𝑝
𝑇𝑖∫ 𝑒(𝜏)𝑑𝜏
𝑡
0
Donde Ti se denomina tiempo integral y es quien ajusta la acción integral. La función de
transferencia resulta:
𝐶𝑃𝐼 = 𝐾𝑝 (1 +1
𝑇𝑖𝑠)
Con un control proporcional, es necesario que exista error para tener una acción de control
distinta de cero. Con acción integral, un error pequeño positivo siempre nos dará una acción
de control creciente, y si fuera negativa la señal de control será decreciente.
Este razonamiento sencillo nos muestra que el error en régimen permanente será siempre
cero.
PD: acción de control proporcional-derivativa, se define mediante:
𝑢(𝑡) = 𝐾𝑝𝑒(𝑡) + 𝐾𝑝𝑇𝑑
𝑑𝑒(𝑡)
𝑑𝑡
Donde Td es una constante de denominada tiempo derivativo. Esta acción tiene carácter de
previsión, lo que hace más rápida la acción de control, aunque tiene la desventaja
importante que amplifica las señales de ruido y puede provocar saturación en el actuador.
La acción de control derivativa nunca se utiliza por si sola, debido a que solo es eficaz
durante períodos transitorios. La función transferencia de un controlador
PD resulta:
𝐶𝑃𝐷(𝑠) = 𝐾𝑝 + 𝑠𝐾𝑝𝑇𝑑
Cuando una acción de control derivativa se agrega a un controlador proporcional, permite
obtener un controlador de alta sensibilidad, es decir que responde a la velocidad del cambio
del error y produce una corrección significativa antes de que la magnitud del error se
vuelva demasiado grande. Aunque el control derivativo no afecta en forma directa al error
en estado estacionario, añade amortiguamiento al sistema y, por tanto, permite un valor más
grande que la ganancia K, lo cual provoca una mejora en la precisión en estado estable.

INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 26 de 28
PID: acción de control proporcional-integral-derivativa, esta acción combinada reúne
las ventajas de cada una de las tres acciones de control individuales. La ecuación de un
controlador con esta acción combinada se obtiene mediante:
𝑢(𝑡) = 𝐾𝑃𝑒(𝑡) +𝐾𝑝
𝑇𝑖∫ 𝑒(𝜏)𝑑𝜏
𝑡
0
+ 𝐾𝑝𝑇𝑑
𝑑𝑒(𝑡)
𝑑𝑡
Y su función transferencia resulta:
𝐶𝑃𝐼𝐷(𝑠) = 𝐾𝑃 (1 +1
𝑇1𝑠+ 𝑇𝑑𝑠)
4. EQUIPO Y MATERIALES
1 Motor de corriente directa de imán permanente de 12 V, 2 A max.
2 Potenciómetros lineales de 10 kW, 1 vuelta.
Acople mecánico para acoplar el eje del motor con el eje de un potenciómetro.
Tabla de conexionado o protoboard
3 Amplificadores operacionales LM741
Resistencias (calculadas previamente)
1 potenciómetro lineal de 100 kW
1 transistor C2073
1 transistor A1011
Cables
DIGIAC 1750
5. METODOLOGÍA
5.1 Pasos a seguir para la realización de la práctica
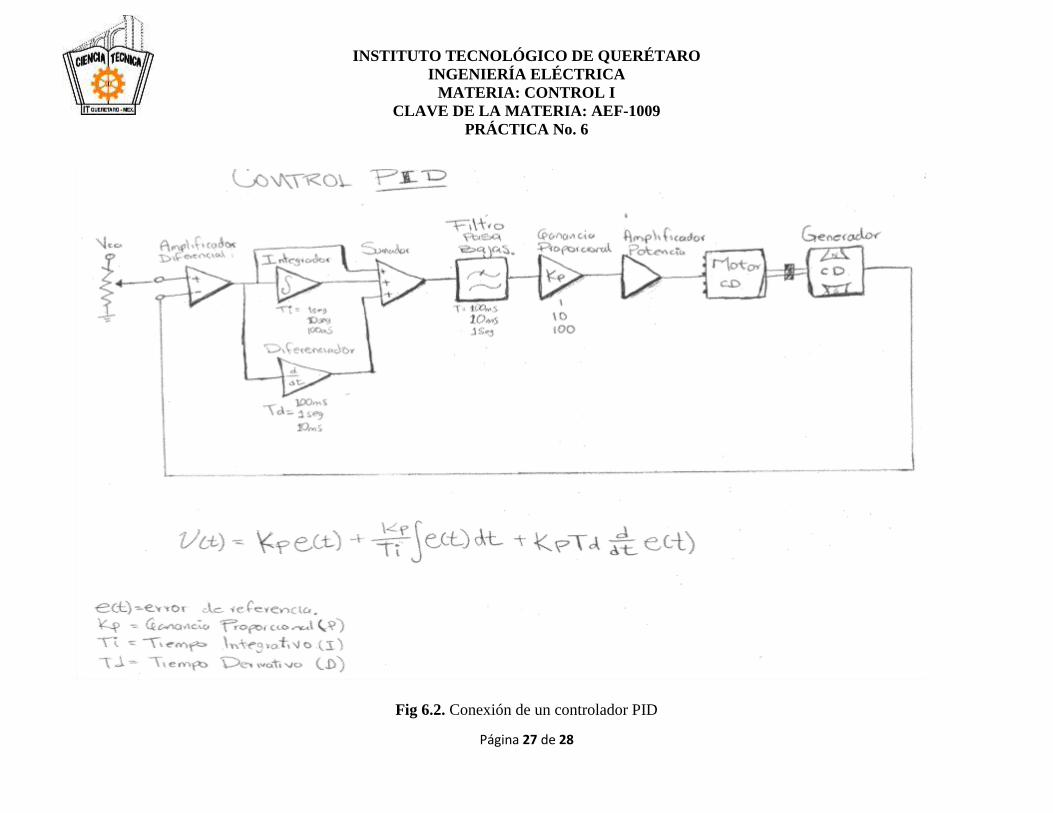
5.1.1 Armar en el DIGIAC 1750 el circuito control PID.
5.1.2 Armar con los elementos solicitados el control de velocidad de un motor como se
muestra en el diagrama.
5.2 Diagramas o dibujos
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 27 de 28
Fig 6.2. Conexión de un controlador PID
INSTITUTO TECNOLÓGICO DE QUERÉTARO
INGENIERÍA ELÉCTRICA
MATERIA: CONTROL I
CLAVE DE LA MATERIA: AEF-1009
PRÁCTICA No. 6
Página 28 de 28
5.3 Tablas
5.4 Precauciones y/o Notas








![Significaciones de taragma [perturbación] en Heracles de Eurípides](https://static.fdocuments.ec/doc/165x107/5891b1421a28abdc1c8c47a5/significaciones-de-taragma-perturbacion-en-heracles-de-euripides.jpg)








