INOVACCION HERRAMIENTAS MINERAS
100
esarrollo e Innovacio la Herramienta Miner
-
Upload
miguel-angel-juarez-lopez -
Category
Documents
-
view
236 -
download
0
description
SE MUESTRA HERRAMIENTA NUEVA PARA EL TRABAJO DE MINERIA, DESDE UNA PALA COMUN HASTA EL MAS SOFISTICADO SISTEMA DE EXCAVACION Y UBICACION
Transcript of INOVACCION HERRAMIENTAS MINERAS

Desarrollo e Innovacion de la Herramienta Mineras

Evolución de la Tecnología
MineraHistoria de la Minería
Comienzos de la Civilización:
Cueva de León (Swazilandia): Primera mina registrada con 43,000 años de antigüedad. El hombre paleolítico extraía la hematita (mineral
•
compuesto de hierro) para producir unpigmento ocre.4000 A.C: Minas de piedra encontradas Francia e Inglaterra, para la fabricación armas y herramientas de trabajo.
• en de
• Adquisiciones tecnológicas del hombre (fuego, vivienda, ropa, etc), lo llevan a evolucionar también en la minería (metal fundido en la Edad de Bronce).Los principales hitos históricos de la época•antigua están ligados a la minería y a la
Edad Edad EdadEdadtecnología, evolucionando la humanidad.Piedra Cobre Bronce Hierro
3500 AC 2500 AC 1000 AC

Concepto
Que es la Innovación Tecnológica?Es la transformación de una idea en producto nuevo o
mejorado, introducido en el mercado, o un
procedimiento operacional nuevo o mejorado, usado
en la industria o el comercio.

Y
Concepto
También se considera como la mejora de losPROCESOS para aumentar la PRODUCTIVIDAD
x1,x2, ...xn YPRODU
CTOParámetros o variables Proceso de
de entrada transformación (Resultado)
f (x)

Objetivo de la Innovación Tecnologica
• Aumentar la productividad (producir más conmenos). En consecuencia aumentar la rentabilidad
••
Incrementar nivel de Seguridad en los procesosMejora del medio ambiente
¿Cuánto y a que ritmo?
Æ Lo determina las condiciones de operación

F H A i l C i Elé t i
C il d
La propuesta tecnológica.... Unpoco de historia
Barreno Perf. Rotatoria ManualPerforación
Perf, electrica Perf. DHDPerforadora Diamantina Perf. Diesel
Pólvora Dinamita Anfo AcuagelVoladura
Sanfo Emuls.
LHDFuerza Humana y Animales FFCC Camiones EléctricosCarguío yTransporte
C. Remoto
ChancadorChancadorGiratorioMandíbulas
Chancado RodillosMolino de Molino de SAGalta presiónBarras Bolas
Concentración Gravitacional Flotación Espuma Celdas Gigantes
ConcentraciónColumnas
Horno ReverberoMitsubishi
FundiciónConvertidor Peirce-Smith Fusión Flash CT Contop
Oxidación ambiental Contilanodey tostación sulfatanteE. Refinación Refinación Electrolítica
Cátodos PermanentesEW Lix. Agitación Lix. Bacterial Curado Acido
HidrometalurgiaTostación clorurante Lix. en bateas SX VSF
20001800 1820 1840 1860 1880 1900 1920 1940 1960 1980

1949
Reflexion a futuro
Historia de Quiebres Tecnológicos
512
49
3
62
3 1
205000
1900
Tajo abierto
1925
Conversión
CPS
1950 1975 2000
Flotación
1901Cuantos
quiebres se
produciran?
1907 1909
Le
ye
s (%)
Pro
du
cc
ión
(M
t)
Fundición
Flash
1949

Escenario actual y tendencias a futuro delmercado minero

Pronostico de demanda futura de principales metales
66%Incremento Cu
2010 - 2030

Pronostico de produccion mundial de Cobre

Declinacion de la calidad de reservas de Cobre
0.6%

Disminucion de yacimientos de oro de calidad

Incremento en el costo de produccion mundial de oro

Tendencia alcista del costo de la energía
Minimizar los altos costos de energía

200
Utilidad de las compañias MinerasUtilidad %
60%2001=100
450
400
350
50%
40%
30030%
25020%
10%150
0% 100
50-10%
-20% 0
2005
2006
2007
1T20
08
2T20
08
3T20
08
4T20
08
1T20
09
2T20
09
3T20
09
4T20
09
1T20
10
2T20
10
3T20
10
4T20
10
Utilidad Precios

Innovación tecnológica en minería

Necesidades de la Minería Actual

Porque es necesario innovar en mineria?
Incremento de productividad y rentabilidad
Mejora en seguridad
Mejora de los niveles de control ambiental y eliminacion
responsabilidades
Porque permite implementar la metodologia de “Control
procesos” como solucion a problemas
Introduce sistemas de tecnologia de información para
obtener un mejor control.
de
de

Vision de las necesidades de la minería

Necesidades de la minería actual
Maximizar la Seguridad• Evitar accidentes
MAYORSEGURIDAD
MAYORPRODUCCION=

Necesidades de la minería actual
Minimizar el Costo Total por Tonelada
Intercambio de Carga
Tiempo de CicloTiempo Ocioso
ProgramaciónCarga Útil Comunicación
Maximizando Producción y Productividad
Pistas de Circulación Inicio de Pala Manejo de Descarga

Necesidades de la minería actualMedio Ambiente y Responsabilidad Social
• Cuidar el Medio Ambiente
• Mejorar la calidad de vida de las Comunidades

Evolución de la Tecnología Minera
• Perforación
PerforadoraAutónoma
PerforadoraAutomática
PerforadoraDiesel / Elect.
PerforadoraNeumática
Combo/cincel
Tiempo
Ava
nce
T
ecn
oló
gic
o

o
n
Evolución de la Tecnología Minera
• Carguío y Transporte
MáquinaAutónom
a
MáquinaAutomátic
aMáquina
ControladaMáquina
Guiada
Tiempo
Ava
nce
T
ecn
oló
gic
o
A t
A
tonoma
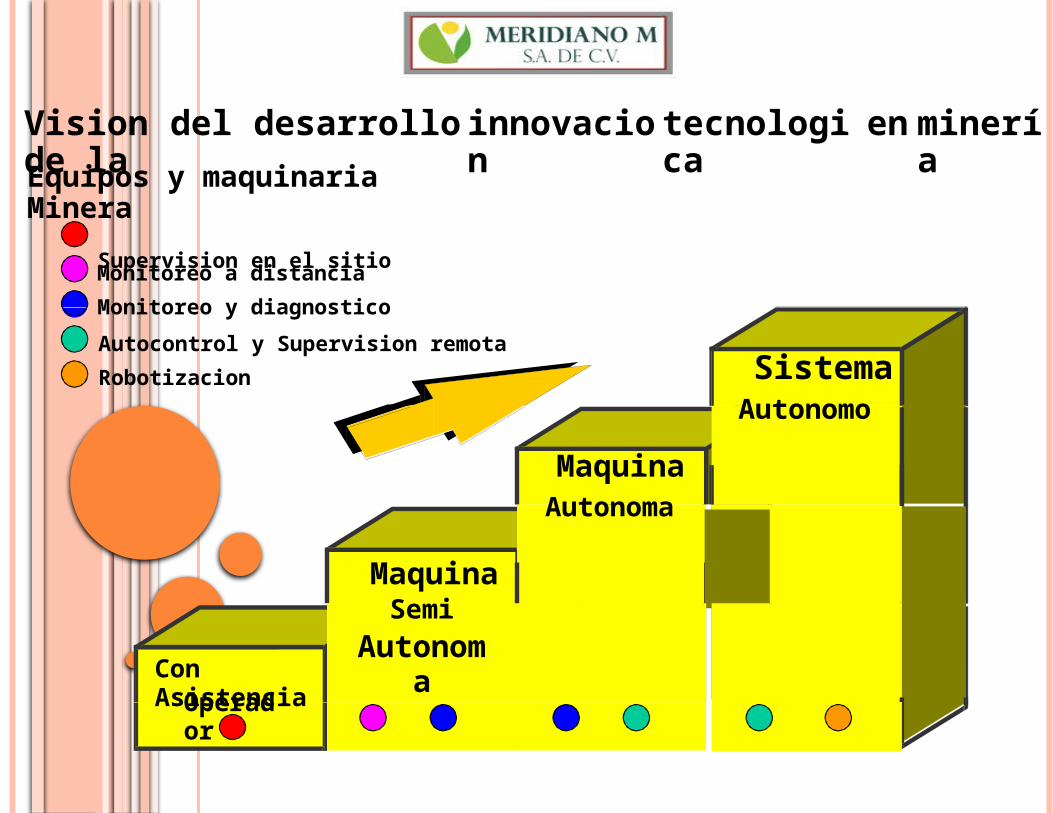
Vision del desarrollo de la innovacion tecnologica en minería
Equipos y maquinaria Minera
Supervision en el sitio
Monitoreo a distancia
Monitoreo y diagnostico
Autocontrol y Supervision remota
Robotizacion
Operador
MaquinaAutonoma
MaquinaSemi
AutonomaCon Asistencia
SistemaAutonomo

f
d
tó
Tecnología Minera:Siguientes Pasos
Mina Autónoma• Camiones Autónomos
• Perforadoras Autónomas
•TTTs Autónomos
• Vehículos Ligeros Autónomos
Complejidad vs. Tiempo
Máquinas autónomas• Ejm: Camión o Perforadora
Autónoma
Máquinas Semi - autónomasIntervención del Operador
Ejm:Cambiar la broca en
una perforadora autónoma
Asistencia deOperación
con atributos automáticos
Control Remoto Ejm:Autoperfor
aciónGuía y Controlde Equipos
Tiempo
Com
plej
idad

Sistema de MinaAutónomaAutónoma
MineGemMi
GSistema de Manejo de
Flota MineStar
AutonomíaUnderground
CAES – Alta
Aquila Drill Alta Precisión
GPS
Condition Monitoring MineStar
Health
Control RemotoTTT’s
Detección deP i ió
VIMS
CamiónAutónomo
Precisión GPS
WAVScamaras
obstáculos en baja velocidad
Tecnología Minera: Desarrollo en el tiempo
Enfoque en el Producto Personas / Enfoque en el Proceso Proceso Integrado
Autónoma
Sistema de
TTT’s
CAES – Alta Detección de
aja velocidad
1990’s 1995 2000 2005 2010 2015 2020
Prod
ucto
s Ai
slado
sIn
egra
dos
con
el s
iste
ma
del c
lient
e
obstáculos en
WAVS b
ontrol Remoto
MineGemAutonomía
UndergroundManejo de
FlotaMineStar
CCondition Monitoring MineStar
Health
Aquila DrillAlta Precisión
GPS
Precisión GPSCamiónAutónomo
VIMS camaras
Sistema de Mina

El i
Tecnología Minera:situación actualPerforadora y Equipos
AutónomosCamión Autónomo
• El cliente minero busca mayorproductividad y utilización
• La industria haun
incrementado suenfoque en menor impactoambiental y mayor SeguridadExiste una Alta rotación / Curva de•
Mina Autónomaaprendizaje de los operadores enmuchas partes del mundo
• Laen
tecnología viene siendo aceptadamuchas compañías mineras
• La tecnología ya se encuentrapreparada para soportar la demanda:
––––
Comunicación Wireless
Posicionamiento GPS Procesamiento por ComputadoraTecnologíaSensores
de Cámaras y
Transporte Autónomo Oficina Remota Alta Precisión GPS

Tecnología Minera: Nuevos protocolos y mediciones
Las métricas para una mina autónoma serán muy diferentes
Mina Actual
Cambio deTurno
Medio Día
Producción con Turnos
Cambio de Turno Media Noche
Improductivos
Mina Autónoma
Habrá algún cambio de turno
Media Noche Medio Día Media Noche
para los camiones en una minaautónoma?
Tiempos Llenado deCombustible

Signos vitales - Salud de MaquinaControl de produccion
• CAES – admnistracion de material• Aquila – Optimizacion de fragmentacion por voladura
E i
Herramientas en la innovaciontecnologica en minería
• Monitoreo• En mina• A distancia• Diagnostico - Solución
• Rastreo o localizacion• En Superficie
• Dispatch – Administración de flota••
• En medio subterraneo - (Procesos similares, aun por optimizar)• Operación a distancia
•••
Tele-remotaOperación semi-autonomaSistema autonomo (Robotización)

Productospara Minería Subterránea

Redes de comunicación subterranea para• Trasmision de voz y data• Alertas de seguridad – Evacuación
• Localizacion y monitoreo de produccion y signos vitales• Accionamiento a distancia (Incl voladura)
Innovaciones en minado subterráneo
•
• Barreras electronicas para aislar areas de produccion
• Operación semi-autonoma (Operación tele-remota) y autonoma
• Minadores continuos (Carga y acarreo)
• Chancado primario subterráneo y fajas
• Control centralizado

Distribuciónde la red
24 lectores (AccessPoints) instalados desdela superficie hasta elnivel 8

Sistemas de comunicación “wireless” para trasmisiondedata, voz y accionamientoa distancia
EAM Modulo de acceso electronico
EAM

Sistemas de comunicación “wireless” para monitoreo de la condicion de los equipos

Sistema de accionamiento teleremoto

Sistema de restriccion de ingreso ó “malla” de seguridad
Sistema laser de restriccion de Ingreso a zonas de produccion de personas y vehiculos no autorizados
cabina control ser colocada en superficie
o en algun lugar en mina

Sistema de restriccion de ingreso o “malla” de seguridad

A d
Sistemas de navegación de equipos en minas subterraneas
LHDs
• Autocarga
• Auto desplazamiento
• Auto descarga
• Telemetria
Camiones UG
• Auto desplazamiento
• Auto descarga
• Telemetria

Operación semi-autonoma MINEGEM

Operaciones donde es usa el MINEGEM
LKAB(Sweden)
P.T Freeport(Indonesia)
George Fisher(Mt Isa)
North Parkes and Newcrest Ridgeway
(decommissioned)
Stawell Gold Mines
Newmont Jundee
BHP BillitonNickel West Cliffs
Goldfields Waroonga
22 Sistemas operandoa Enero 2010
Barrick Kanowna Belle
Newcrest TelferOlympic Dam
(decommissioned)
OZ Minerals

MINEGEM Rastreo de maquina y
material
• MINEGEM rastrea con precision la posicion dela maquina, basado en el escaneado delLADAR y la telemetria de la maquina
• No requiere el uso de los tags RFID(Identificadores de personas o maquinas via
deseñal de radiofrecuencia) en el areaoperacionEl ingreso al “punto de carguio” esta mapeado por Identificadores de locacion virtuales “virtual
•
location tags”• Los puntos de descarga estan mapeados y
ubicados automaticamente.• El proceso
produccion reportes de
de cumplimiento de las metas depueden ser rastreadas y obtenerproduccion y excepciones.

M j t bilid d & R fi d d Vid & di Mi St
Evolución deMINEGEM de Caterpillar
Generation 5
Generation 4MXY
Generation 3
Generation 2
MXX
Año 20xx
Software•Refinado de Copiloto•Enrutamiento Autopiloto•MineStar Health / VIMS•Refinado de Video & audio•Instalacion simplificada•Entrega “paquete”•Actualizacion del interface del usuarioHardware•Implementacion sensores•Camaras WAVS•MINEGEM Lite - Concepto
Año 20xx
Software•Automatizacion - Camion•Rendimiento sobre capacidad humana
Hardware•Maquinas autonomas•Automatizacion - Camion•Cat standard hardware
Año 20xx
Software•Autopiloto para ciclo total•Autodig - Autocarga•Autodump - Autodescarga•MineStar - integracion
Hardware•Monitoreo condicion de via•Automatizacion a camion prorotipo•R1300G•R3200G
Año Actual
Software•Copiloto•Soporte a mandoAutopiloto•Mejoras en estabilidad & Confiabilidad•Mejoras en el diagnostico& soporte
Hardware•VIMS Guardian•Robustez en Estacion del operador

2
Optimum rango de Scan
Sistema de navegación sin operador mediantedetección Laser con rango (LADAR)
Laser Detection and Ranging (LADAR)
Ejemplo tipico de un perfil
escaneado por LADAR
Máximo rango de Scan - 80m
Optimum rango de Scan - 30m
1
2
180° de radio de Scan
Paredes de galeria (Scaneado)
3
Paredes de galeria (Mapeado)
Cobertura del LADAR
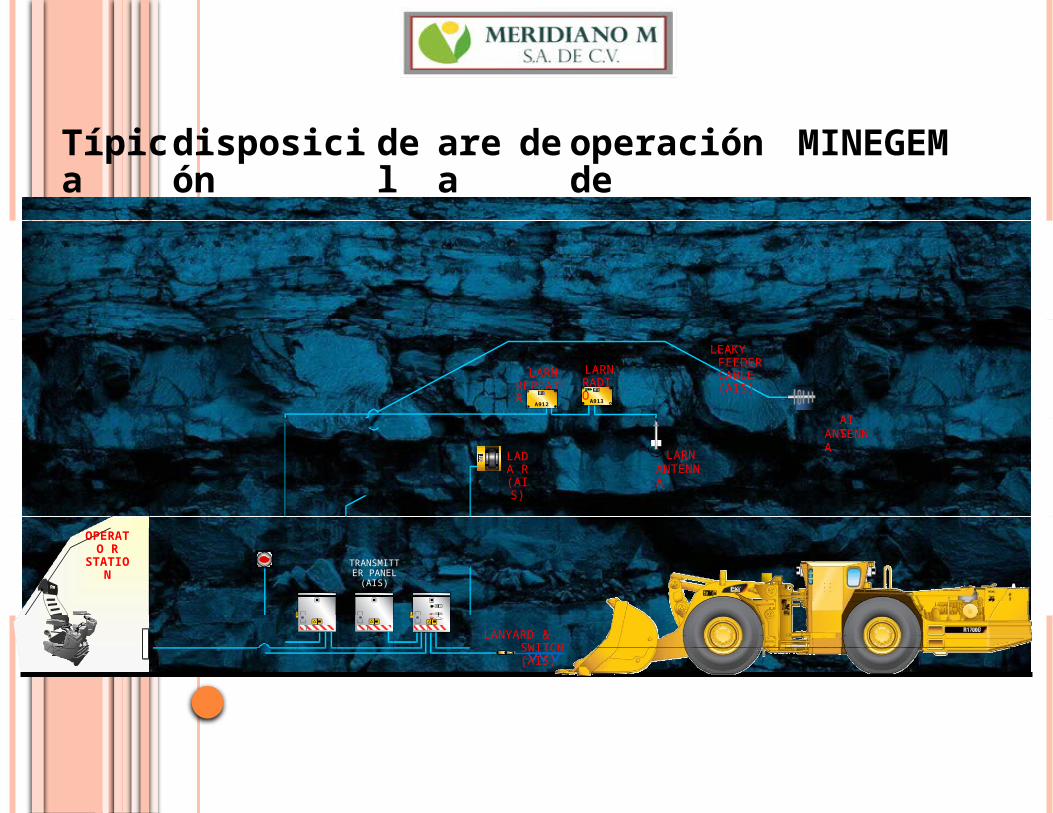
Típica disposición del area de operación deMINEGEM
LEAKY FEEDER CABLE (AIS)LARN
RADIOLARN
REPEATER
AISANTENNA
LARNLADA R
(AIS)ANTENNA
OPERATO R
STATION TRANSMITTER PANEL (AIS)
LANYARD & SWITCH (AIS)
A912A913

Comunicación via radio
Comunicación
i Comunicación
Comunicaciones en minado subterraneo
a traves de laroca
Sistema derastreo de
equipo
sin cables fibraoptica
UHF

Productos de Tecnología Caterpillar
para Minería de Superficie

MineStar
Productos de Tecnología Caterpillar para Minería
Solución tecnológica completa para todos los equipos mineros:
••
•
FleetCommander: Manejo de flota de camiones y palas (Baja Precisión)
Aquila: Guía y control para perforadoras / Guía para Dragalinas (Alta precisión)
CAES: Control de Mineral en Palas y cargadores (Alta Precisión)••
•
CAES: Control de Nivel en motoniveladoras, tractores y traíllas (Alta Precisión)Minestar Health: Sistema de monitoreo de salud de los equipos
CIODS: Sistema para evitar colisiones en los camiones
• Remote Control: Sistema de control remoto para Tractores de orugas
MineStar – Paquete integrado de tecnologias aplicado a Productos Caterpillar para minería

¿Qué es MineStar?

Productos de Tecnología Caterpillar
para MineríaRASTREO DE MINERAL : FLEET COMMANDER
• Determina prioridades de mejoresrutas para optimizar producción:Define restricciones Camión – Ruta•
• Determina número óptimo decamiones para producir el máximotonelaje al menor costo
• Control de velocidad de los equipos,demoras y carga útil en tiempo real
••
Pantalla en camión con mapa móvil.Reportes KPI en tiempo real
• Intercambia mensajes entreoperadores y la oficina
10 a 15% en el incremento de la
productividad.

condiciones
Productos de Tecnología Caterpillar
para Minería
CAES - Control sobre el material removido
• El operador puede ver el tipo delasmaterial a remover sin
externasimportar
condiciones
• El operario puede controlar mejor elnivel del piso del banco paraincrementarMejora la
velocidad de acarreo
• calidad del blending, yreduce dilución.
• Evita mala asignación de camiones
Retorno de la inversión en menosde cuatro meses ha sidodocumentado

Productos de TecnologíaCaterpillar para MineríaCAES - Mejorar el nivel de las vías
• Menores re-trabajos nivelaciónapropiada
Aporte para mejoras en:•––
Construcción de caminosControl de bancos y botaderos
– Pistas, drenajes, rampas, etc. Se recupera 1 a 2 ciclos por turno porla mejora de los caminos y accesos• Incrementa vida de las llantas

Productos de Tecnología Caterpillar
para MineríaCIODS - Seguridad
• Camiones mineros tienen puntosciegos desde el asiento del operador.50% a 60% de los accidentesreportados por las minas se debe a lapobre visibilidad a bajas velocidades
• El operador puedecríticas
ver zonas deyadvertencia
radares)(cámaras Vista del
Operador
Vista de un tercero

Camiones autónomos: Un proyecto hecho realidad

Mejoras en productividad por el uso de MineStar
• Optimización de la asignación de camiones
¾10 –15% incremento en productividad (Más viajespor turno)
Incremento en la carga útil (Mejor fragmentación)
¾5% de mejora en mineras de cobre (Tonelaje x
hora) Mayor disponibilidad y utilizacionMenor numero de paralizaciones de equipos (VIMS)
Informacion oportuna para mantenimiento (VIMS)
Prevencion de fallas y planeamiento de reparaciones
Control de abastecimiento de combustible (VIMS)
•
••
•
•
•

A fin de cuentas que es MineStar?Es un sistema integral para mejorar productividad y seguridad en la mina

Sala de Control “Room Control”
• Control en mina
• Control en oficina país
• Control en oficina
corporativa en el exterior

Centro Integrado de Operaciones (CIO) CONTROL ROOM
•El CIO entrega análisis de causalidad, y genera predicciones de ocurrencia deeventos indeseables y así facilita las acciones y proyectos correctivos•Controla cumplimiento del programa de producción, controla costos, reduce pérdidas, evita mantenimientos fortuitos y todo evento que interrumpan el proceso productivo•Este nuevo modo de gestión promueve mayor productividad y competitividad,disminuyendo la variabilidad de los procesos, ganando eficiencia y elevando producción a menor costo.• Se estima que puede disminuir la variabilidad en 25 por ciento. Al mismo tiempo,permite identificar fallas y problemas en forma temprana”
El Centro Integrado de Operaciones está compuesto básicamente por instrumentosy equipos de campo en terreno (sensores electrónicos), que deben capturar datosde cada proceso productivo y entregarlos a los sistemas de información especializados en los distintos procesos, todo centralizado en un gran sistema quecoordina la información relevante, la cual es presentada en tiempo real.
Además, el centro contribuye a aumentar el rendimiento y productividad de losequipos, reducir pérdidas operacionales, mejorar las condiciones ambientales y laeficiencia de los procesos, apoyando la creación de nuevas formas de trabajo

MineStar Health
(Salud de maquina)

¿Qué es el MineStar Health?

Manejo de los funciones vitales de los equipos

Que es el VIMS?
(Sistema de Control de las Funciones Vitales)

Que es el VIMS?
(Sistema de Control de las FuncionesVitales)
• Proporciona, información sobre el
funcionamiento y producción de un equipo
de mina CAT.
• El VIMS proporcionar información en
tiempo real sobre las funciones críticas de
la máquina.
• El VIMS controla muchos de los sistemas
de la máquina y optimiza su funcionamiento
mediante un rápido intercambio información
para que el equipo trabaje siempre con la
máxima productividad.

Brinda informacion para un analisis rapidoeficiente
Reduce fallas en los componentes de los equipos
Beneficios por aporte del sistema MineStar Health
•
• Incrementa la vida de los componentes
•
•
Reduce paralizaciones imprevistas
Se aplica a toda una flota• y
• Mejora los procedimientos de mantenimiento
• Herramienta vital paray reparacion – MARC
contratos de mantenimiento

AQUILA
(Control de perforacion de roca)

consumible
AQUILA Producto de Tecnología
Caterpillar
AQUILA – Contro de la perforacion
• Muestraoperación
y registra 6 variables de
––
–
–
Profundidad de perforaciónRatio de perforación
Velocidad de rotación900’ levelPresión de Pull-down y Bailing.
––
Torque de rotación
Energía acumulada para cadaconsumible 835’ level
••
Reducción de sobre/sub perforaciónReducción en consumo de explosivos
••
Bancos más uniformesMejor FRAGMENTACION
Está documentado un 25% de reducciónen el uso de explosivos
69’65’ 71’ 62’

fragmentación vs. zonas intactasMineral vs. Zonas estériles.
AQUILA Producto de Tecnología
CaterpillarAQUILA - Control sobre la perforación
• Reconocimiento en tiempo real de:––
••
Ubicación de taladros ya realizados
Sistema de alarmas visual yauditivo en caso
salgade
deque la
perforadora la zonaasignada a perforar.
• “Pipe in Hole” Bloqueo depropulsión
••
EstadísticasReportes
de producción
de performance:Operarios, Grupos, Equipos.

Reconocimiento de roca (Aquila Strata Recognition)
� Reconoce en tiempo real la variacion de laspropiedades de la rocas
� Fracturas vs. zonas intactas
� Mineral vs. zonas de desmonte
� Ayuda a determinar un Indice de volavilidad(Blastability index) para el optimizar el resultado voladura
de la
� Permite dosificar la energia de explosivo necesariapara una voladura
��
Cantidad de explosivo por taladroSeleccionar tipo de explosivo

Tecnologias asociadas al sistema de Reconocimiento de Roca - índice de Volabilidad

Tecnologias asociadas al sistema de Reconocimiento de Roca - índice de Volabilidad

Tecnologias asociadas al sistema de Reconocimiento de Roca - índice de Volabilidad
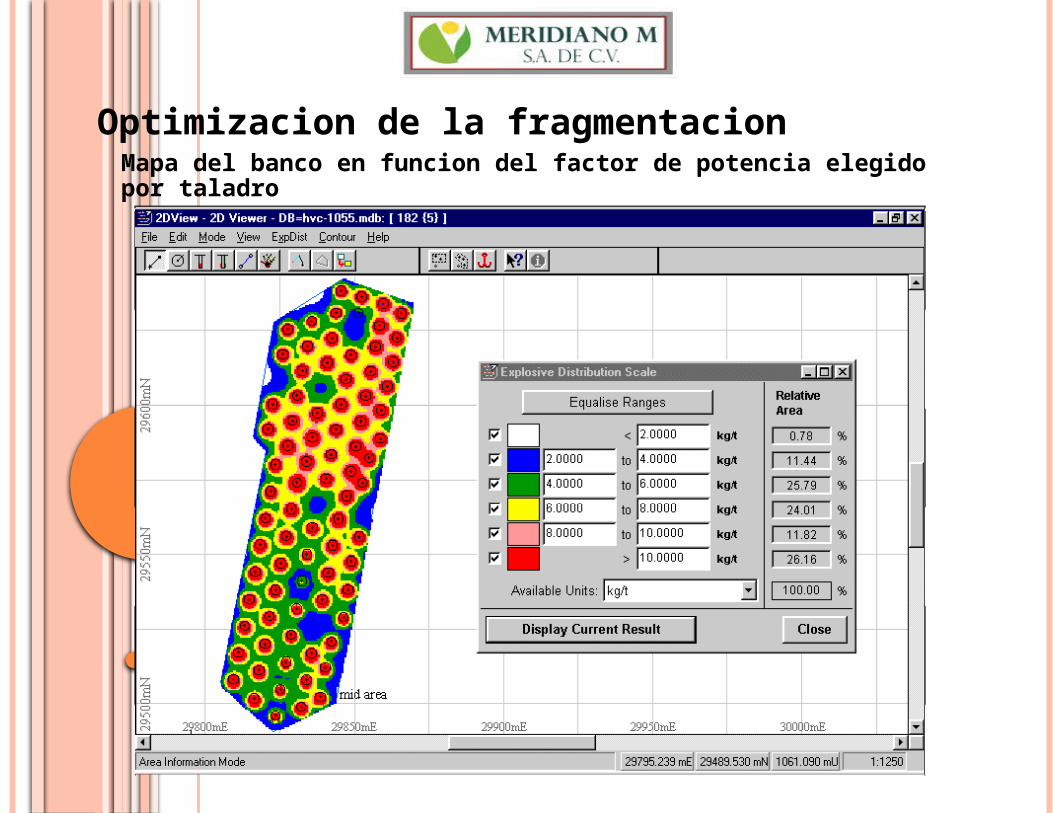
Optimizacion de la fragmentacionMapa del banco en funcion del factor de potencia elegido por taladro

Optimizacionde la fragmentacionCamiones de explosivos con dosificacion de carga para cada taladro
• Recibe data via wireless• Reporta consumo portaladro

Optimizacion de lafragmentacion
Sistema del detonador electronico (SDE)
EL SDE es el sistemaelectronico de iniciacion
El detonador electronico es elcon un detonador electrico N°
producto0
de ensamblar el SDE
Detonador ensambladoDetonador
electronicoinstantaneo
Implementacion del tapon
Para evitar el ingreso de agua

Innovacion en desarrolloToma de muestras con analisis y reporte
inmediato
� Toma de muestras con
analisis simultaneo XRF
� Se mapea toda la columna
� Se trasmite data via sist Wireless con identificacion del taladro
BENEFICIOS
� Control de calidad
� Consistencia de la produccion
entregada a planta

I f
i
T l
PerforacionPerforacion
d
l
i
t
Mapa de desarrollo de laperforadora Autonoma
Fase 2 Fase 3 Fase 4Fase 1
a C/R
totalmente
Linea de tiempo* Realizable a traves de los procedimientos de operacion establecidos por la mina (Por ejemplo; banco cerrado, acceso limitado, “llanura del banco” a+ 300 milímetros etc) - detección de obstáculo para evitar impactos no esta incluido en la línea del tiempo mostrado
Auto-desplazamiento
Una sola fila
Auto Nivelacion
Perforacion
Autonoma (*)
Perforacion Automatica
Navegacion
RRA
Tele-remoto
Data de perforacion
Supresion Automatica
de polvo
ReconocimientoDe roca
Propulsion Auto desplazamiento Todo el banco
Intercambio deInformacion
Muestreo de recortes de perforacion
Interface por tercera parte

Automatización como soluciónen camino

Que es automatización?
DEFINICION
Es la operación de una maquina o proceso mediante
dispositivos como los robots que pueden ejecutar decisiones sin
intervención del ser humano. La principal bondad de esos
dispositivos es el uso de sistemas de control de auto-correccion
que se basa en la retro-alimentacion
Una definición mas común orientada a minería, incluye
- Control Tele-remoto
-
-
Sistema de comunicación avanzada
Control de navegación semi-automática, asistida por video y
opcionalmente con accionamiento a distancia

f
de procesos Operadores comodos
Navegacion por laser (1990)
Evolucion de la automatización en minería
Nuevos metodos de minado basado enLa BOTIZACION
Maquinas diseñadas para automatizacion
de procesos, Operadores comodos
Automatizacón de maquinas existentes
Control Remoto y Teleremoto
SistemasObsoleto
sHoy
Mecanización
Herramientas con energia
Con apoyo de animales
Herramientas manuales
Comunicación radio UHFy Leaky Feeder (1980)
Comunicación de banda ancha y
Navegacion por laser (1990)
Asuncion de riesgos para modificaccion
con automatizacion (2000)
Minado de yacimientos pobres,trabajosen ambientes dificiles y planes de
cumplimiento predecibles (2010 +)

M t d t i i t
Guias claves para la automatización en minería
Reducir
US$Ton
• Mejora de seguridad y condiciones de trabajo++++++
Operadores localizados en áreas segurasOperación consistentePredecibleIncremento de utilizaciónMejora en control de operacionesMenor costo de mantenimiento

Diseño conceptual de un roof bolter automatizado

Concepcion de minado inteligente de superficie

Produccion Mineral De Mineral a superficie
Beneficios de la automatizacion son maximizados cuando
...... La automatización es adaptada al proceso de minado
Produccion Mineral De Mineral a superficie
.... Y el diseño de mina y el proceso de minadoes adaptado a la automatizacion
Produccion de Mina
DesarrolloDe
Extraccion de
Carga y transporteAutomatizado Relleno
Chancado yIzaje

Soporte a la automatización
Sistema Operador (mina)• Los operadores del sistema son entrenados para manejar la operación diaria y problemas menores
1er Nivel
Cuadrilla de Mantenimiento (OEM/Mina)• Mantiene al sistema de automatización (y las maquinas)
2do NivelEspecialista del sistema (OEM/Mina)• El especialista entrena al personal de mina, modifica el sistema y mantiene la operatividad del sistema in situ
3er Nivel Soporte Remoto (OEM)• El soporte remoto es disponible para actualización y solución de problemas vía un conexión segura de Internet

Exhibe algún nivel de conducta inteligente
Que es un robot?Un robot es un agente artificial mecanico o virtual.Es usualmente un sistema que por su apariencia y movimientosConlleva un sentido de actuar por si mismo
•••
Puede sensar el ambientePuede manipular el ambienteExhibe algún nivel de conducta inteligente





Innovaciones para la seguridaden Minería

Cámaras para visualización de áreas ciegas de los equipos
Sistema de visualizacion WAVS (Work Area Vision System

Cámaras de visualización de áreas ciegas de los equipos

Sistema de alerta por satelite para evitar colisiones pordeficiente visualización del entorno aledaño de los
equipos
Dispositivo Trasmisor
- Receptor instalado
en el equipo

Sistema CIODS de deteccion de objetos
Tyco Radar
WAVS Camera WAVS Camera
Que es detectar objectos?Tyco Radar
Sistema que alerta al operador detectar presencia de objetos cercanos a su vehiculo�� En sistema consite de
9 Pantalla interactiva
9 Software integrado al tren de fuerza9 Camaras
9 Cableado
9 Radar de alto rango
9 Radar de mediano alcance
Usando el display el operador puede ver las zonas criticas�� Una vez que el operador sale de su equipos se desactiva el radar

e
Porque necesitamos un detectorde objetos en minería?Evitar accidentes por choques
Maquinas grandes no permiten visualizar
presencia de objetos desde la estacion del
operador
•
• Cuando la maquina esta detenida otros
vehiculos pueden estacionarse en lugares
no visibles para el operador
79% de choques en mina provienen d•
camiones grandes
59% de estos impactos se producen con•
otros vehiculos (38% objetos fijos, 3%
personas)
69% de choques ocurre a baja velocidad•

Sistema anticolision de vehiculos subterraneos

LV TO PASS
Operacion de un sistema anticolision evitando choqueentre un LHD y un vehiculo ligero
LIGHT VEHICLE TAGTRANSMITTER
LHD ALLOWSLV TO PASS
LHD RECEIVERREGISTERS LV
PRESENCE

Capacitación en operación,
virtual

Conclusiones

Conclusiones
• La interrelación entre el ser humano, laminería y la tecnología es inevitable;se encuentran muy ligados entre sí enel afán de ser mejores cada día.
• Las innovaciones tecnológicasactuales y por crear ofrecen solucionesde productividad (menor costo portonelada producida) y seguridad.
• El soporte 24/7 del proveedor deTecnología es de vital importanciapara el correcto funcionamiento delsistema así como los inputs de lamina para lograr óptimos outputs.El siguiente paso de la tecnología en la•minería será tener una minacompletamente autónoma.