Informe Control Automatico de Procesos Listo Orozco_Lobos
20
Informe: Segunda Evaluación Control Automático de Procesos Integrantes : Cristian Orozco Pedro Lobos Profesor : Daniela Vallejos Asignatura : Control Automático De Procesos Sección : 145 Fecha : 21.10.2014
-
Upload
cristian-rene-orozco-perez -
Category
Documents
-
view
21 -
download
2
description
Informe INACAP
Transcript of Informe Control Automatico de Procesos Listo Orozco_Lobos

Informe: Segunda Evaluación
Control Automático de Procesos
Integrantes : Cristian Orozco Pedro Lobos Profesor : Daniela Vallejos Asignatura : Control Automático De Procesos Sección : 145 Fecha : 21.10.2014

Control Automático de Procesos
1
Contenido
Introducción ............................................................................................................................... 2
Marco Teórico ............................................................................................................................ 3
Filtro Pasivo ........................................................................................................................... 3
Sistema Masa – Resorte – Amortiguador .............................................................................. 3
Experiencia N°1: Filtro ............................................................................................................... 5
Esquema. ............................................................................................................................... 5
Función de transferencia. ....................................................................................................... 5
Diagrama de Bode ................................................................................................................. 6
Circuito Implementado en Simulink. ....................................................................................... 7
Respuesta del Filtro a Frecuencia baja. ................................................................................. 7
Respuesta del Filtro a Frecuencias Altas. .............................................................................. 8
Conclusiones ......................................................................................................................... 8
Experiencia N°2: Suspensión de un Automóvil .......................................................................... 9
Esquema. ............................................................................................................................... 9
Ecuación Diferencial. ............................................................................................................. 9
Diagramas en Simulink ........................................................................................................ 10
Valores Iniciales ................................................................................................................... 11
Conclusiones del sistema con los valores Iniciales .............................................................. 12
Cambio de valores N°1 ........................................................................................................ 13
Conclusiones del sistema con cambio de valores N°1 ......................................................... 15
Cambio de valores N°2 ........................................................................................................ 16
Conclusiones del sistema con el Cambio de valores N°2 .................................................... 18
Bibliografía ............................................................................................................................... 19
Control Automático de Procesos
2
Introducción
La primera versión de MATLAB data de los años 70, y fue diseñada como herramienta de apoyo para los cursos de Teoría de Matrices, Álgebra Lineal y Análisis Numérico. El nombre MATLAB es un acrónimo: “MATrix LABoratory”. Hoy en día MATLAB es un programa muy potente, con un entorno agradable, que incluye herramientas de cálculo científico y técnico y de visualización gráfica, así como un lenguaje de programación de alto nivel.
En la experiencia realizamos la simulación en este potente software de dos sistemas; un sistema eléctrico (filtro) y un sistema mecánico (masa-resorte-amortiguador).
La principal herramienta usada dentro de MATLAB fue el entorno de programación visual SimuLink en el cual realizamos la representación de los diagramas de bloques de los sistemas.
Control Automático de Procesos
3
Marco Teórico
En este laboratorio se simulan dos elementos en MATLAB. El primero un sistema eléctrico (filtro) y el segundo un sistema mecánico (masa-resorte-amortiguador). A continuación explicamos brevemente el funcionamiento de ambos sistemas
Filtro Pasivo Los filtros pasivos son elementos formados únicamente por elementos pasivos, es decir, resistencias, condensadores y bobinas. En esta experiencia simulamos en Matlab un filtro pasivo de segundo orden(R-L-C).
En los sistemas de comunicaciones se emplean filtros para dejar pasar solo las frecuencias que contengan la información deseada y eliminar las restantes. Los filtros son usados para dejar pasar solamente las frecuencias que pudieran resultar ser de alguna utilidad y eliminar cualquier tipo de interferencia o ruido ajeno a ellas.
Son circuitos caracterizados por una entrada y una salida de forma que en la salida solo aparecen parte de las componentes de frecuencia de la señal de entrada. Dependiendo del tipo de filtro la función de transferencia tomará el valor 1 para un tipo de frecuencia si se desea que la señal pase a esa frecuencia, mientras que tomará el valor 0 si no debe pasar, diciéndose que se rechaza la señal.
Los filtros se pueden poner en cascada hasta obtener la función que se necesite.
Sistema Masa – Resorte – Amortiguador La masa de un cuerpo es la cantidad de materia que contiene, misma que se supone constante. Físicamente, la masa es la propiedad de un cuerpo que le da inercia, es decir, resistencia a moverse o detenerse. Un cuerpo es atraído por la Tierra y la magnitud de la fuerza que ejerce la Tierra sobre él se denomina peso.
Un amortiguador es un dispositivo que proporciona fricción viscosa o amortiguamiento. Está formado por un pistón y un cilindro lleno de aceite. El aceite resiste cualquier movimiento relativo entre la varilla del pistón y el cilindro, debido a que el aceite debe fluir alrededor del pistón (o a través de orificios en el pistón) de un lado del pistón al otro. El amortiguador esencialmente absorbe energía. Esta energía absorbida se disipa como calor y el amortiguador no almacena energía cinética ni potencial

Control Automático de Procesos
4
Un resorte es aquel que regresa a su configuración original después de haberse deformado y luego liberado. Más aún, cuando dicho sistema se estira una distancia x (para compresión, x es negativa), la fuerza restauradora ejercida por el resorte está dada por la ley de Hooke.
F = -kx
El signo menos indica que la fuerza restauradora siempre tiene dirección opuesta al desplazamiento. La constante del resorte (o elástica) k tiene unidades de N/m y es una medida de la rigidez (dureza) del resorte. La mayoría de los resortes obedecen la ley de Hooke si las deformaciones son pequeñas.
Control Automático de Procesos
5
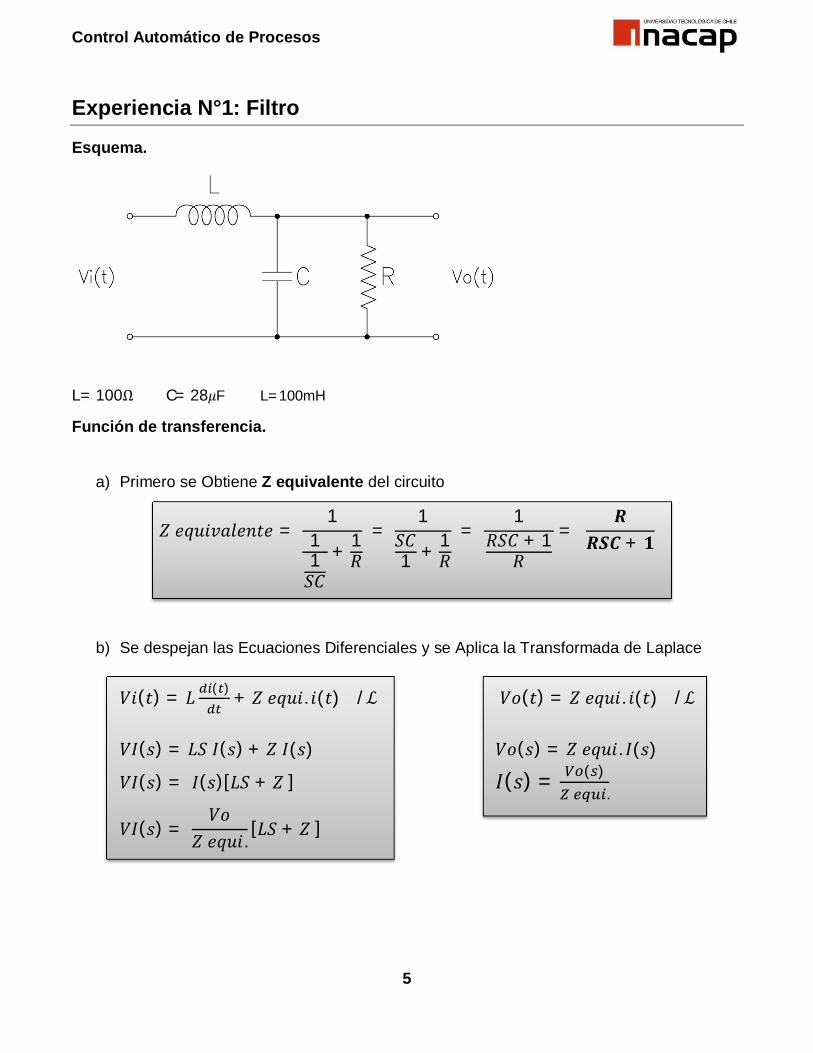
Experiencia N°1: Filtro
Esquema.
L= 100Ω C= 28휇F L=100mH
Función de transferencia.
a) Primero se Obtiene Z equivalente del circuito
푍푒푞푢푖푣푎푙푒푛푡푒 = 1
11푆퐶
+ 1푅=
1푆퐶1 + 1
푅=
1푅푆퐶 + 1
푅=
푹푹푺푪 + ퟏ
b) Se despejan las Ecuaciones Diferenciales y se Aplica la Transformada de Laplace
푉푖(푡) = 퐿 ( ) + 푍푒푞푢푖. 푖(푡)/ℒ 푉표(푡) = 푍푒푞푢푖. 푖(푡)/ℒ
푉퐼(푠) = 퐿푆퐼(푠) + 푍퐼(푠) 푉표(푠) = 푍푒푞푢푖. 퐼(푠)
푉퐼(푠) = 퐼(푠)[퐿푆 + 푍] 퐼(푠) = ( ) .
푉퐼(푠) = 푉표
푍푒푞푢푖.[퐿푆 + 푍]

Control Automático de Procesos
6
푉퐼(푠) = 푉표(푠)퐿푆 + 푍푍푒푞푢푖.
→→→→푉표(푠)푉푖(푠)
= 푍푒푞푢푖.퐿푆 + 푍
Función de transferencia
푉표(푠)푉푖(푠)
= 푅
푅퐶푆 + 1 .푅
푅퐶푆 + 1 + 퐿푆→→→→
푉표(푠)푉푖(푠)
= 푅
퐿퐶푅푆 + 퐿푆 + 푅
Diagrama de Bode
Control Automático de Procesos
7
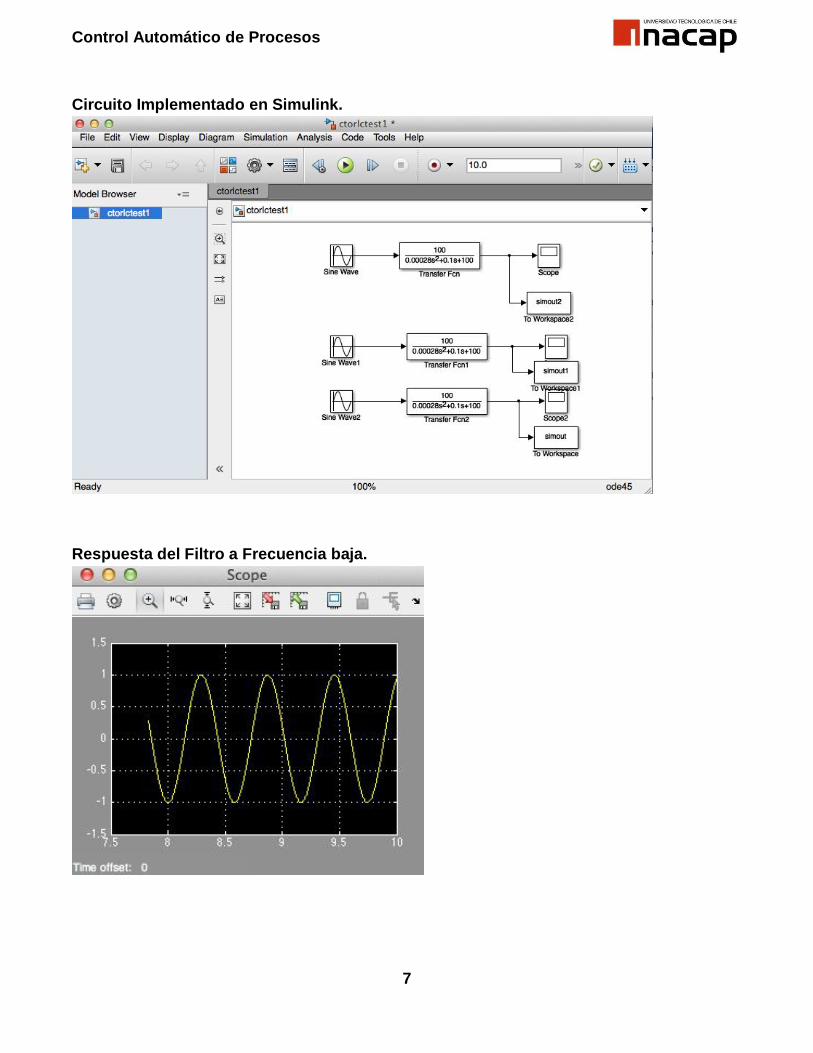
Circuito Implementado en Simulink.
Respuesta del Filtro a Frecuencia baja.

Control Automático de Procesos
8
Respuesta del Filtro a Frecuencias Altas.
Conclusiones Aquí nos dio como resultado un filtro pasa bajo, ya que deja pasar las frecuencias bajas y bloquea las frecuencias altas, como se puede apreciar en las instantáneas de Matlab. Al aumentar aún más la frecuencia el filtro comienza a amplificar la señal.

Control Automático de Procesos
9
Experiencia N°2: Suspensión de un Automóvil
Esquema.
Ecuación Diferencial.
푚푑 푋표푑 푡
+ 푏푑푋표푑푡
+ 퐾푋표 = 퐾푋푖 + 푏푑푋푖푑푡
푚푋표 + 푏푋표 + 퐾푋표 = 퐾푋푖 + 푏푋횤 /1푚
푋표 + 푏푚푋표 +
퐾푚푋표 =
퐾푚푋푖 +
푏푚푋횤
Resultado
푋표 = 퐾푚푋푖 +
푏푚푋횤 −
푏푚푋표 −
퐾푚푋표
Control Automático de Procesos
10
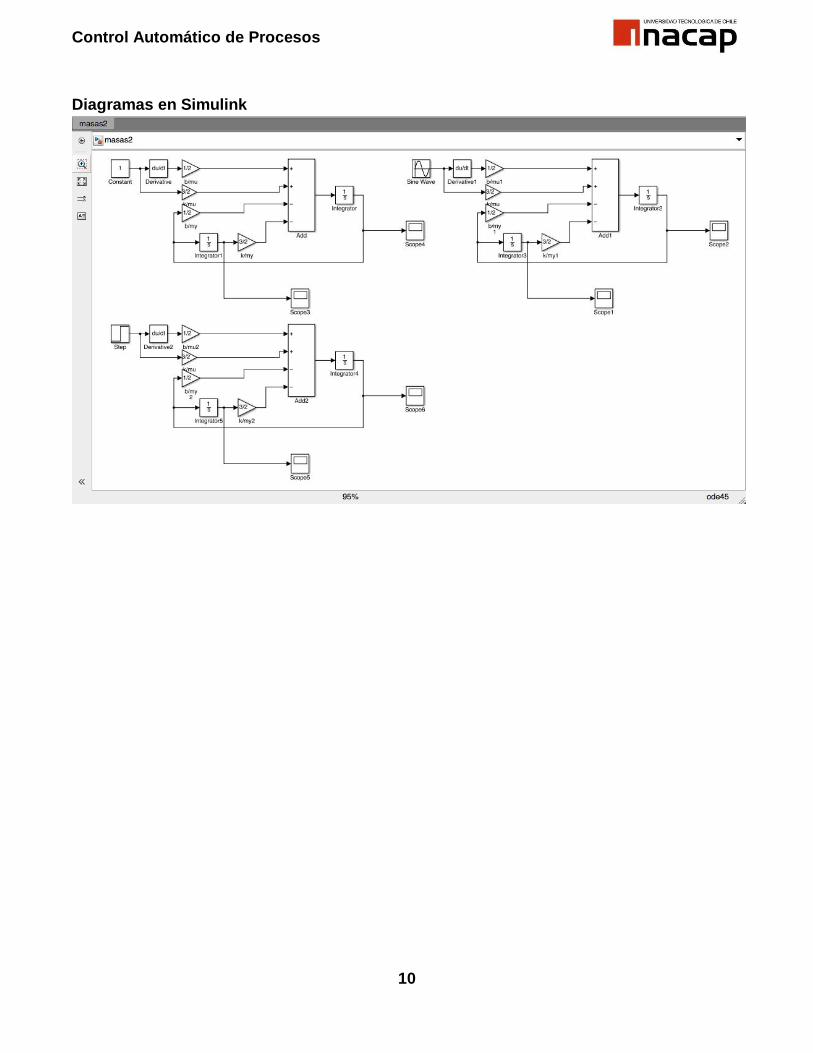
Diagramas en Simulink
Control Automático de Procesos
11
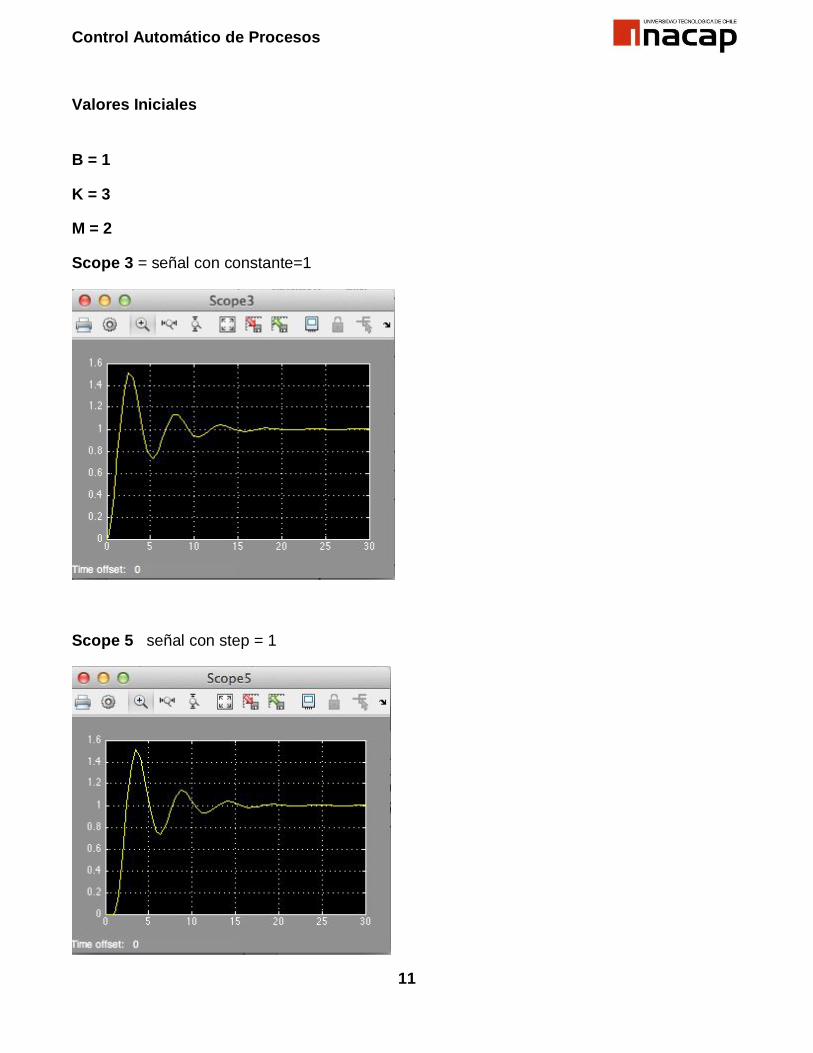
Valores Iniciales
B = 1
K = 3
M = 2
Scope 3 = señal con constante=1
Scope 5 señal con step = 1

Control Automático de Procesos
12
Scope 1 = señal sinusoidal = 1
Conclusiones del sistema con los valores Iniciales Podemos visualizar mediante el Scope 3 la señal constante que tiene el valor igual a 1, el sistema responde de igual manera que en el Step (scope 5) aunque con constante se demora un poco menos en llegar al valor maximo que en este caso es 0,5 por lo que se demorará un poco menos tambien en estabilizarse, la primera se estabiliza en el tiempo 20 y la otra en el tiempo 23 aprox, aunque despues sigue oscilando pero es muy pequeña la oscilacion que llega a ser casi estable.
Lo contrario pasa con el sistema que le aplicamos una señal sinusoidal, este permanece oscilando a medida que el tiempo avanza, y tambien oscila en valor mas alto del que se da en la configuracion del sine wave, ya que oscila entre 2 y -2.
Estos fenomenos se pueden notar ya que el sistema como vemos es un sistema de amortiguación, sigue oscilando por que el sine wave a cada momento esta provocando al sistema a hacerlo, y este oscila el doble por que es un sistema de amortiguacion.
Control Automático de Procesos
13
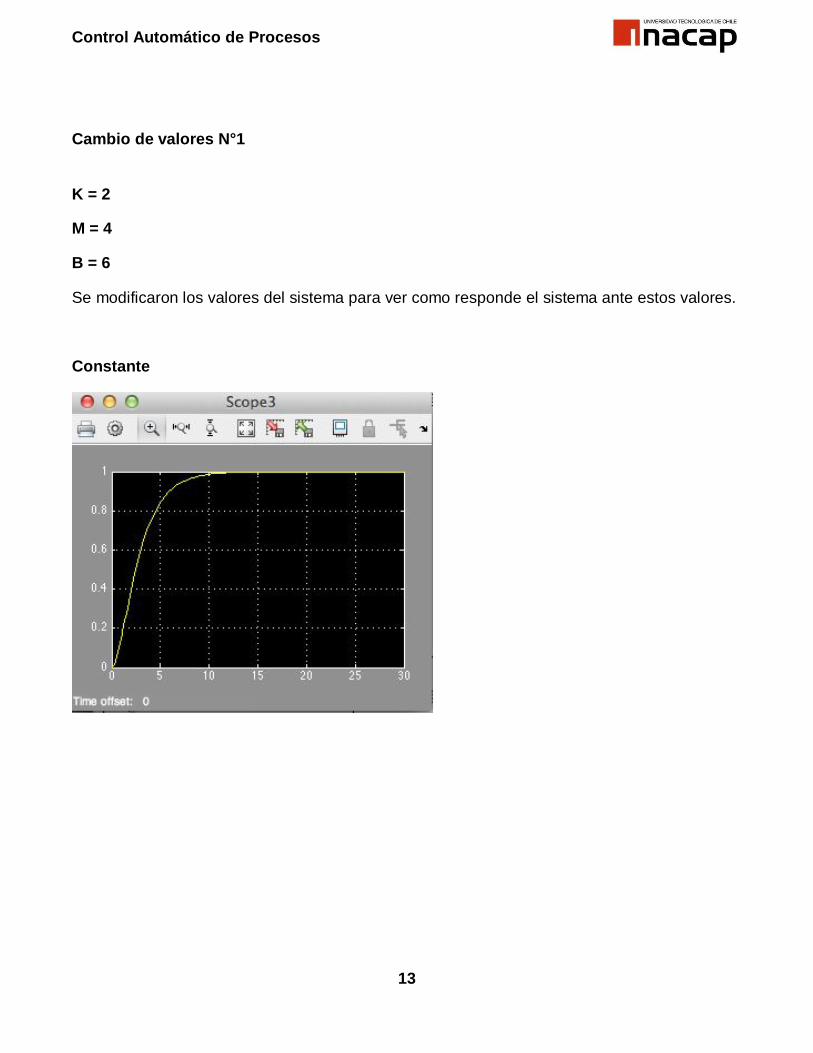
Cambio de valores N°1
K = 2
M = 4
B = 6
Se modificaron los valores del sistema para ver como responde el sistema ante estos valores.
Constante
Control Automático de Procesos
14
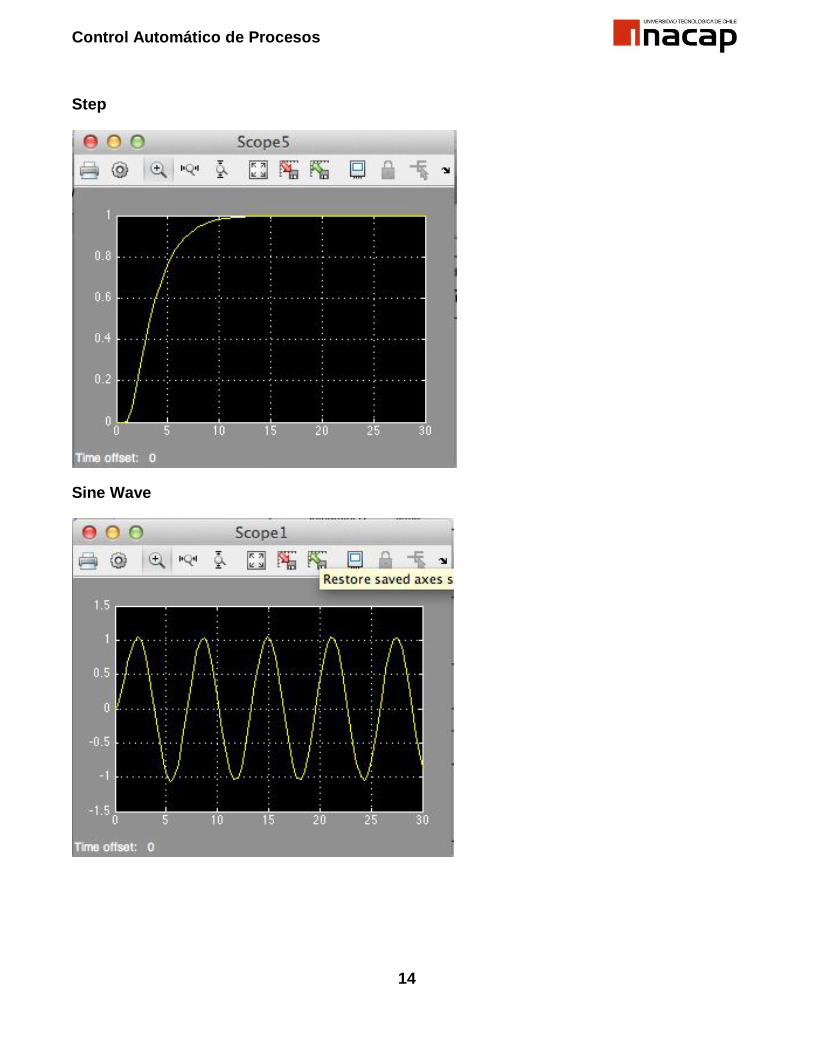
Step
Sine Wave
Control Automático de Procesos
15
Conclusiones del sistema con cambio de valores N°1 Queda de primer orden, ya que el valor de amortiguacion y el valor del resorte son mayores que el valor de la masa y cuando le aplicamos la señal sinusoidal esta se mantiene en el rango ya que la masa es menor que el valor del amortiguador y el resorte tambien influye ya que junto al amortiguador sostienen a la masa.
El Constant y el step se demoran lo mismo en llegar al valor del set point y el sine wave oscila desde el comienzo entre los mismos valores 1 y -1
Control Automático de Procesos
16
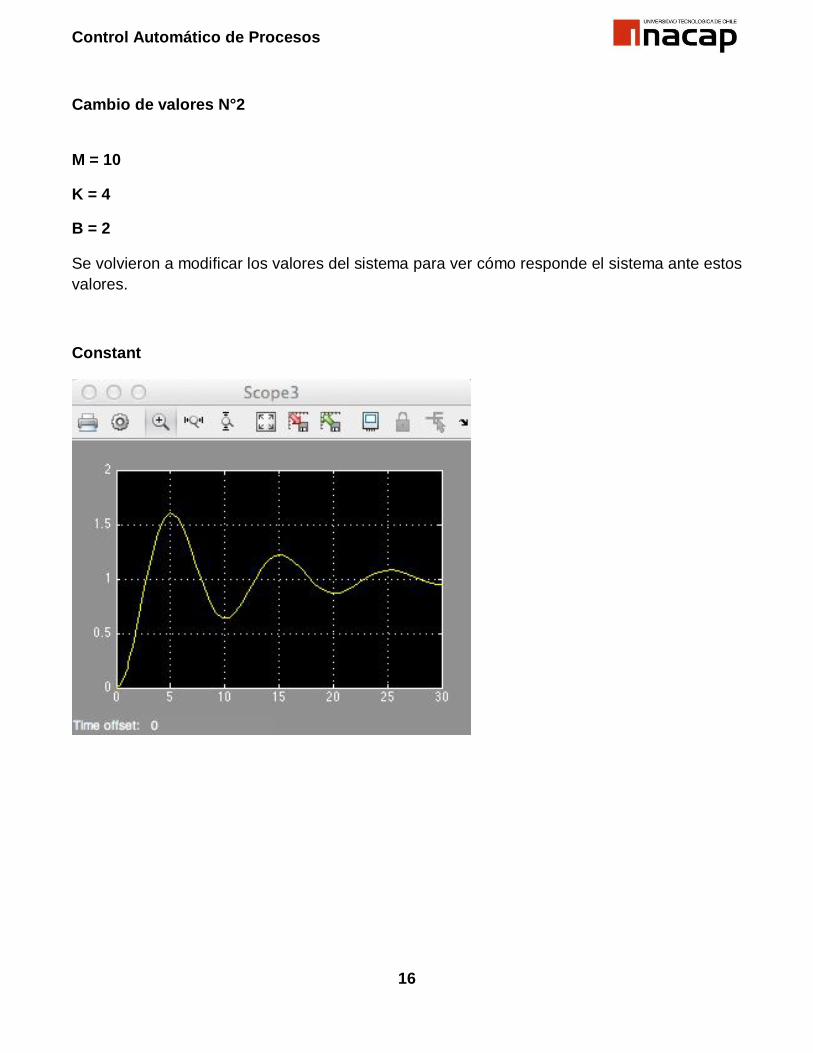
Cambio de valores N°2
M = 10
K = 4
B = 2
Se volvieron a modificar los valores del sistema para ver cómo responde el sistema ante estos valores.
Constant

Control Automático de Procesos
17
Step
Sine Wave

Control Automático de Procesos
18
Conclusiones del sistema con el Cambio de valores N°2 Al modificar los valores y dejar el valor de la masa en 10, podemos darnos cuenta que el sistema esta sometido a un peso mayor que la resistencia a este que son la amortiguacion y el resorte.
Ahora el sistema se demora mucho mas en llegar a estabilizarse, vemos que a los 30 segundos aun el sistema no se ha estabilizado y esto se debe a que el valor de la masa es muy alto comparado con el amortiguador y el resorte.
Tiene un sobrepaso maximo de 0,5 tanto en el step como en el constant, ademas de que con el step se demora un poco mas en llegar al valor maximo y tambien un poco tiempo de mas comparandolo con el constant en estabilizarlo.
El sine wave oscila en valores dentro del rango.

Control Automático de Procesos
19
Bibliografía
Katsuhiko Ogata. “Ingeniería de Control Moderna”. Tercera Edición1998.