Guía de Practica 1
15
LABORATORIO DE AUTOMATIZACIÓN DE PROCESOS FACULTADES DE INGENIERÍA INDUSTRIAL, ELECTRÓNICA Y MECANICA UNIVERSIDAD PONTIFICIA BOLIVARIANA - SECCIONAL BUCARAMANGA SEMILLERO DE CONTROL PhD. HECTOR RAMIRO PEREZ PRÁCTICA 1 INTRODUCCIÓN A LA ARQUITECTURA DE CONTROL ALLEN BRADLEY. OBJETIVO GENERAL Evaluar las características de la arquitectura Allen Bradley, constituida por un gabinete principal, un sistema de entradas y salidas remotas, y un sistema de control de movimiento. MARCO TEÓRICO 1. Modelo CIM El modelo CIM plantea la integración de las áreas de la empresa, mediante el enlace de sus procesos de producción (diseño, ingeniería y fabricación), con los de gestión (planeación y administración). FUNCIONES • Adquirir, almacenar y procesar información, en forma continua y confiable, correspondiente al proceso. • Ejecutar acciones de control iniciadas por el operador. • Alertar al operador sobre cambios detectados en la planta. • Aplicaciones en general, basadas en la información obtenida por el sistema en tiempo real, tales como: reportes, gráficos de tendencia, historia de variables, cálculos, predicciones, detección de fugas, etc. REQUISITOS • Deben ser sistemas de arquitectura abierta, capaces de crecer o adaptarse según las necesidades cambiantes de la empresa. • Deben comunicarse con total facilidad y de forma transparente al usuario, al proceso, y con el resto de la empresa (redes locales y de gestión). • Deben ser programas sencillos de instalar, sin excesivas exigencias de hardware, y fáciles de utilizar, con interfaces amigables con el usuario. • Las ventajas y facilidades que debe brindar el modelo CIM, básicamente se resumen en dos funciones primordiales: la Eficiencia de la operación y la Seguridad.
-
Upload
juan-estupinan -
Category
Documents
-
view
158 -
download
2
Transcript of Guía de Practica 1

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 1/15
LABORATORIO DE AUTOMATIZACIÓN DE PROCESOSFACULTADES DE INGENIERÍA INDUSTRIAL, ELECTRÓNICA Y MECANICAUNIVERSIDAD PONTIFICIA BOLIVARIANA - SECCIONAL BUCARAMANGA
SEMILLERO DE CONTROL
PhD. HECTOR RAMIRO PEREZPRÁCTICA 1
INTRODUCCIÓN A LA ARQUITECTURA DE CONTROL ALLEN BRADLEY.
OBJETIVO GENERAL
Evaluar las características de la arquitectura Allen Bradley, constituida por un
gabinete principal, un sistema de entradas y salidas remotas, y un sistema de
control de movimiento.
MARCO TEÓRICO
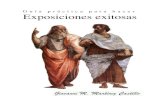
1. Modelo CIM
El modelo CIM plantea la integración de las áreas de la empresa, mediante elenlace de sus procesos de producción (diseño, ingeniería y fabricación), con losde gestión (planeación y administración).
FUNCIONES• Adquirir, almacenar y procesar información, en forma continua y confiable,correspondiente al proceso.• Ejecutar acciones de control iniciadas por el operador. • Alertar al operador sobre cambios detectados en la planta. • Aplicaciones en general, basadas en la información obtenida por el sistema entiempo real, tales como: reportes, gráficos de tendencia, historia de variables,cálculos, predicciones, detección de fugas, etc.
REQUISITOS• Deben ser sistemas de arquitectura abierta, capaces de crecer o adaptarse
según las necesidades cambiantes de la empresa.• Deben comunicarse con total facilidad y de forma transparente al usuario, alproceso, y con el resto de la empresa (redes locales y de gestión).• Deben ser programas sencillos de instalar, sin excesivas exigencias dehardware, y fáciles de utilizar, con interfaces amigables con el usuario.• Las ventajas y facilidades que debe brindar el modelo CIM, básicamente seresumen en dos funciones primordiales: la Eficiencia de la operación y laSeguridad.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 2/15
Figura 1. modelo CIM según nist
2. CONTROLADOR DE AUTOMATIZACIÓN PROGRAMABLE PAC.
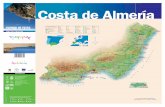
En la última década, los expertos en la industria han analizado la necesidad demejorar las estrategias de control usando algoritmos más rápidos y la necesidadde usar procesadores de punto flotante, RAM, herramientas de softwarepoderosas, e interfaces gráficas que harían de la PC la plataforma fundamental dela Automatización Industrial. Sin embargo, al día de hoy los PLC continúandominando la mayoría de las fábricas para aplicaciones de control de procesos ymáquinas. Aunque muchos ingenieros han evaluado el uso de la PC parafunciones avanzadas, como control y simulación análogo, conectividad con basede datos, aplicaciones basadas en web y comunicación con dispositivos externos,la PC no ha podido competir con el PLC para aplicaciones basadas en control. Lascomputadoras estándar e incluso las que se manejan a nivel industrial, soncomputadoras realmente frágiles en cuanto a la exigencia que a nivel industrial serequiere, considerando que un fallo en el equipo puede resultar en pérdidas parala empresa, las cuales no siempre se limitan a pérdidas económicas. Todas lascircunstancias descritas anteriormente, han llevado a que los expertos en elámbito industrial hayan decidido entre contar con un PLC que ofrezca robustezindustrial y confiabilidad o bien una PC efectiva en mediciones y comunicacionesanálogas. En la figura 2 se puede ver el gráfico comparativo donde se evalúa lacapacidad de un PC frente a las versatilidades de un PLC. Como resultado,muchos ingenieros sacrifican funcionalidad de control avanzado que no obtienenfácilmente con un PLC, o fusionan un sistema que incluye un PLC para controldiscreto y una PC para funcionalidad avanzada.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 3/15
Figura 2. PC vs PLC
Estas soluciones representan un gran inconveniente, debido a que muchas vecesel software no ha sido diseñado para trabajar con el hardware que se utiliza y esto
dificulta no solo el desarrollo del proyecto sino que realmente lo hace no cien porciento confiable, por lo tanto la incompatibilidad entre estos llevo a las nuevasgeneraciones de PLC‟s. En la actualidad, existe una tercera opción. Losingenieros pueden utilizar productos que ofrecen una hibridación de la PC y delPLC. Los PAC combinan las mejores características de la PC, incluyendo elprocesador, la RAM, y software potente, con la confiabilidad, dureza, y naturalezadistribuida del PLC. Los PAC combinan el empaque y dureza del PLC con laflexibilidad y funcionalidad de software de la PC. Estas nuevas plataformas sonideales para control sofisticado y registro de datos en ambientes rudos. Laflexibilidad de la PC como lo es el procesador de punto flotante para cálculospersonalizados, un servidor web interactivo para control y monitoreo fácil,
Compact Flash removible para acceso de datos, y múltiples puertos seriales paracomunicación con dispositivos externos, proveen características y funcionesimposibles de implementar en un PLC.
Para complementar las capacidades análogas del controlador la plataformatambién incluye gran exactitud en módulos análogos de entradas/salidas conresolución de 16 bits y acondicionamiento de señales para exactitud y precisión enmediciones y control análogos. PAC toma las mejores características de la PC: el5

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 4/15
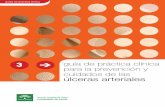
Procesador, la RAM, el software potente y se mezcla con la confiabilidad y durezadel PLC.
Figura 3. Comparación del PLC y el PC con el PAC
Ingenieros en muchas industrias, desde semiconductores hasta petróleo y gas,están en transición a PAC para implementar funcionalidad avanzada con cálculosanálogos, acceso de datos y comunicaciones en sus sistemas de control.
3. Arquitectura Allen Bradley
La arquitectura de Allen-Bradley está constituida por un conjunto de controladores,desde el Controlador Lógico Programable (PLC) que se inventó hace casi 30 añosa la tecnología más reciente incorporada altamente funcional el Controlador deAutomatización Programable (PAC).

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 5/15
Figura 4. Controladores programables Allen-Bradley
Este controlador proporciona una gran ventaja al ser capaz de manejar a una grancantidad de puntos de E/S. En un mismo chasis se pueden colocar varioscontroladores con diferentes módulos de expansión. Al tener múltiples
controladores en el mismo chasis se pueden comunican entre al igual que loscontroladores cuando se comunican a través de redes. Los controladoresdisponibles incluyen: controladores ControlLogix estándar, los controladoresGuardLogix, y los controladores ControlLogix-XT.
Figura 5. Controlador ControlLogix Estándar.
Los ControlLogix estándar proporcionan una solución escalable al manejar grancantidad de puntos de E/S, en cambio los ControlLogix –XT se caracterizan portener revestimiento para ampliar la vida del producto en ambientes adversos ycorrosivos pero igual que el ControlLogix estándar incluyen módulos de control ycomunicación.[10]
Figura 6. Controlador ControlLogix-XT.
La instalación del controlador se realiza sobre un Chasis el cual garantiza laconexión entre los controladores y módulos, los cuales son insertados en lasposiciones disponibles en el Chasis. En el gabinete de control de la arquitecturaRockwell Automation ubicado en el Laboratorio de Automatización se cuenta conun Chasis de 16 slots.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 6/15
Figura 7. Chasis 1756-A13 y Fuente de Alimentación 1756-PA75.
La fuente de alimentación eléctrica común para el controlador y las E/S instaladasen los slots es la 1756-PA75, la cual está encargada de alimentar el chasis.
El controlador utilizado es el ControlLogix 5562, el cual posee una capacidad de4MB para procesar datos y lógica de memoria no volátil. Puede comunicarse por
las diferentes opciones de comunicación del NetLinx y también tiene la opción decomunicarse por un puerto serial RS-232. A su vez está en capacidad de guardarinformación de programas a través de una memoria Compact Flash industrial quepermite tener un Backup de proyectos que estén descargados en el controlador.
El controlador se puede instalar en cualquier ranura del chasis, en este caso seinstaló en el primer slot, ya que la fuente de alimentación se ubica en uno de losextremos del chasis.
Figura 8. ControlLogix 5562 y Panel Frontal.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 7/15
Figura 9. ControlLogix 5562 en Slot 1 del Chasis.
Módulos de E/S y Comunicación ControlLogix
El chasis del gabinete de control de la arquitectura Rockwell Automation ademásdel ControlLogix 5562 cuenta con los siguientes módulos:
- Ethernet.- Entradas y Salidas Digitales.- Entradas y Salidas Análogas.- Módulo de Interface SERCOS.
El módulo Ethernet 1756-EN2T se utiliza para establecer la comunicación a travésde Ethernet Industrial (Ethernet/IP) en redes de protocolo abierto industrialestándar, con lo cual soporta intercambio de información en tiempo real de E/Sque están siendo manejadas por el controlador. A su vez, se encuentra instaladoen el slot 2 del chasis. [13]
Figura 10. Módulo Ethernet1756- EN2T.
La conexión Ethernet entre los dispositivos de la red implementada está asociadacon la instalación del Switch Ethernet STRATIX 8000, el cual es un conmutadorindustrial diseñado para ayudar a facilitar la convergencia de redes.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 8/15
Figura 11. Switch Ethernet STRATIX 8000.
A su vez se cuenta con un módulo de entradas digitales 1756-IB16 que poseedieciséis (16) entradas comunes a 24 VDC, y otro de salidas digitales 1756-OW16I, el cual a su vez cuenta con 16 salidas a relé normalmente abiertas decontactos individualmente aislados. Estos se encuentran instalados en la tercer ycuarto slot del chasis, respectivamente.
De igual manera, el módulo de entradas analógicas1756-IF8 posee ocho (8)entradas unipolares y 4 diferenciales de alta velocidad; y el módulo de salidasanalógicas1756-OF4 cuenta con cuatro (4) salidas análogas que pueden ser
utilizadas como canales de corriente o de voltaje. Están instalados en el quinto ysexto slot del chasis.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 9/15
Figura 12. Módulos de Entradas y Salidas Análogas y Digitales.
Finalmente, el módulo de interface de tres (3) ejes Sercos para servos1756- M03SE conecta al controlador ControlLogix a los variadores SERCOS, estemódulo permite controlar posición, velocidad y torque. Este módulo utiliza
conexiones de fibra óptica para todo el cableado de campo. Está instalado en elséptimo slot del chasis.
Figura 13. Módulos SERCOS 1756-M03SE.
Software de Programación RsLogix 5000
RsLogix 5000es el software para la programación de control secuencial, de
seguridad, de procesos, de variadores y de control de movimiento para lasplataformas Logix5000 de Allen Bradley: ControlLogix, FlexLogix, CompactLogix ySoftLogix 5800. Este permite fragmentar la aplicación en programas máspequeños que pueden volver a utilizarse, rutinas e instrucciones que puedencrearse al utilizar distintos lenguajes de programación: diagrama de lógica deescalera, diagrama de bloque de funciones, texto estructurado y diagrama defunciones secuenciales, para el desarrollo del programa, así como el apoyo para elmodelo de equipos, estado de fase de lotes y control de maquinaria.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 10/15
Figura 14. Software RsLogix 5000.
Este software proporciona una biblioteca de instrucciones de control de procesosincorporadas que ofrece un conjunto de instrucciones similar al de un sistemaDCS típico. La arquitectura Logix es compatible con lenguajes como el deprogramación de bloques funcionales para aplicaciones de proceso continuo, y eldiagrama funcional de secuencias y administrador de fases. El lenguaje de textoestructurado es útil para algoritmos complejos tales como cálculos de eficiencia ylas plantillas ActiveX para la configuración rápida de las interfaces de operador.
Software de Comunicación RsLinx Gateway
Es un servidor de comunicación que proporciona una conectividad completa parauna amplia variedad de aplicaciones de software. Permite que el controlador
programable acceda a una amplia variedad de aplicaciones de Rockwell Software .Entre estas aplicaciones se incluyen desde aplicaciones de configuración yprogramación tales como RSLogix y RSNetWorx hasta aplicaciones HMI comoRSView32 , hasta sus propias aplicaciones de adquisición de datos medianteMicrosoft Office o Visual Basic .

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 11/15
Además, RSLinx Classic utiliza técnicas de optimización de datos avanzadas ydispone de una serie de diagnósticos. RSLinx Classic está disponible en cincoversiones que satisfacen diversos requisitos de funciones.
Figura 15. Entorno de Configuración RSLinx.
RsLinx es un OPC, servidor de datos compatible soportado en lasespecificaciones de la OPC Data Access 2,05. OPC es el estándar para lascomunicaciones de planta entre los servidores de datos y aplicaciones cliente.
RSLinx proporciona una interfaz OPC personalizada para C/C + + clientes y una
interfaz OPC Automatización para VB/VBA clientes. RsLinx también es compatiblecon múltiples formatos de DDE (Advance DDE, XL_TBL, CF_TXT) para clientes
como Microsoft Excel. RSLinx puede soportar múltiples aplicaciones de softwaresimultáneamente comunicar a los dispositivos de muchas redes diferentes.
4. Gabinete Instalados
El gabinete principal esta dividió en tres partes: control, acondicionamiento deseñal y potencia.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 12/15
Figura 16. Distribución del Gabinete Principal.
Los gabinetes secundarios están divididos en: gabinete para E/S remotas y
gabinete para el control de movimiento. Para el gabinete de E/S remotas se
distribuyó de igual manera como el gabinete principal, una parte de control,
acondicionamiento de señal y potencia.

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 13/15
Figura 17. Distribución del gabinete de E/S remotas.
5. Conexiones y Planos

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 14/15
Figura 18. Conexiones 1

5/16/2018 Guía de Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/guia-de-practica-1 15/15
Figura 19. Conexiones 2