Geometría diferencial de superficies en el...
18
Geometría diferencial de superficies en el espacio Mariano Suárez-Álvarez 31 de agosto, 2015 1 Superficies en el espacio 1 1.1 Cartas y superficies ..................... 1 1.2 Funciones diferenciables .................. 6 1.3 Espacios tangentes ..................... 7 1.4 Campos tangentes ..................... 11 1.5 Formas diferenciales .................... 13 1.6 Orientabilidad ........................ 15 1.7 Ejercicios ........................... 18 1. Superficies en el espacio §1.1. Cartas y superficies 1.1.1. Una función diferenciable x : U → R 3 definida en un abierto U de R 2 es una carta si es inyectiva y para todo u ∈ U es ∂ 1 x(u) ∧ ∂ 2 x(u) 6 = 0. La traza de x es su imagen x(U). 1.1.2. Un conjunto S ⊆ R 3 es una superficie si para cada p ∈ S hay una carta x : U → R 3 con p ∈ x(U) y tal que x(U) es un abierto de S y la correstricción x : U → x(U), que es biyectiva, tiene inversa continua. 1.1.3. Un primer resultado, que utilizaremos implícitamente todo el tiempo, es que todo subconjunto abierto de una superficie es él mismo una superficie: Proposición. Si S ⊆ R 3 es una superficie y V ⊆ S es un abierto de S, entonces V también es una superficie. Demostración. Sean S y V como en el enunciado y sea p ∈ V. Como S es una superficie, existe una carta x : W → R 3 con x(W) un abierto de V y correstricción x : W → x(W) biyectiva y con inversa continua. Como V y x(W) son abiertos en S, también lo Revision: r453 Compiled: 8 de septiembre de 2015
Transcript of Geometría diferencial de superficies en el...

Geometría diferencial de superficies en el espacio
Mariano Suárez-Álvarez
31 de agosto, 2015
1 Superficies en el espacio 11.1 Cartas y superficies . . . . . . . . . . . . . . . . . . . . . 1
1.2 Funciones diferenciables . . . . . . . . . . . . . . . . . . 6
1.3 Espacios tangentes . . . . . . . . . . . . . . . . . . . . . 7
1.4 Campos tangentes . . . . . . . . . . . . . . . . . . . . . 11
1.5 Formas diferenciales . . . . . . . . . . . . . . . . . . . . 13
1.6 Orientabilidad . . . . . . . . . . . . . . . . . . . . . . . . 15
1.7 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1. Superficies en el espacio
§1.1. Cartas y superficies
1.1.1. Una función diferenciable x : U → R3 definida en un abierto U de R2 es unacarta si es inyectiva y para todo u ∈ U es ∂1x(u) ∧ ∂2x(u) 6= 0. La traza de x es suimagen x(U).
1.1.2. Un conjunto S ⊆ R3 es una superficie si para cada p ∈ S hay una carta x : U → R3
con p ∈ x(U) y tal que x(U) es un abierto de S y la correstricción x : U → x(U), que esbiyectiva, tiene inversa continua.
1.1.3. Un primer resultado, que utilizaremos implícitamente todo el tiempo, es quetodo subconjunto abierto de una superficie es él mismo una superficie:
Proposición. Si S ⊆ R3 es una superficie y V ⊆ S es un abierto de S, entonces V también esuna superficie.
Demostración. Sean S y V como en el enunciado y sea p ∈ V. Como S es una superficie,existe una carta x : W → R3 con x(W) un abierto de V y correstricción x : W → x(W)
biyectiva y con inversa continua. Como V y x(W) son abiertos en S, también lo
Revision: r453 Compiled: 8 de septiembre de 2015

es V ∩ x(W), y entonces W ′ = x−1(V ∩ x(W)) es un abierto de W, ya que x es continua.Sea y = x|W ′ : W ′ → R3, que claramente es una carta. Como la inversa de x : W → x(W)
es continua, el conjunto y(W ′) = x(W ′) es un abierto de x(W), y entonces de S. Porotro lado, la inversa de la correstricción y : W ′ → y(W ′) es la restricción de la inversade x : W → x(W) a y(W ′), así que es continua. Vemos así que V es una superficie.
1.1.4. En general, probar que un subconjunto de R3 es una superficie puede ser unatarea delicada. Hay, sin embargo, una situación que se presenta mucho en la práctica yen la que esto es sencillo:
Proposición. Sea W ⊆ R3 un abierto y sea f : W → R una función diferenciable. El conjuntoS = p ∈ R3 : f (p) = 0 es una superficie si cada vez que p ∈ S se tiene que ∇ f (p) 6= 0.
Demostración. Sea p ∈ S. Como ∇ f (p) 6= 0 podemos suponer, sin pérdida de generali-dad, que ∂3 f (p) 6= 0. Consideremos la función F : q ∈W 7→ (q1, q2, f (q)) ∈ R3, que esdiferenciable. La matriz de la diferencial DF(p) de F en p con respecto a la base usualde R3 es1 0 ∂1 f (p)
0 1 ∂2 f (p)0 0 ∂3 f (p)
y es claramente inversible. El teorema de la función inversa, entonces, nos dice queexisten abiertos A ⊆ W y B ⊆ R3 con p ∈ A y F(A) = B, y tales que la restricciónF : A→ B es un difeomorfismo. Más aún, se sigue del teorema que para todo r ∈ B ladiferencial DF−1(r) es inversible y que tiene a DF(F−1(r)) como inversa.
Consideremos el conjunto U = (u1, u2) ∈ R2 : (u1, u2, 0) ∈ B, que es un abiertode R2, y la función x : u ∈ U 7→ F−1(u1, u2, 0) ∈ R3, que es diferenciable y toma valoresen A. Si u, v ∈ U son tales que x(u) = x(v), entonces
(u1, u2, 0) = F(x(u)) = F(x(v)) = (v1, v2, 0)
y, por supuesto, u = v: esto muestra que x es inyectiva. Por otro lado, si u ∈ Ues ∂ix(u) = ∂iF−1(u1, u2, 0) para cada i ∈ 1, 2, de manera que los vectores ∂1x(u) y∂2x(u) son las dos primeras columnas de la matriz de DF−1(u1, u2, 0) y, en consecuencia,son linealmente independientes. La función x es, por lo tanto, una carta.
Si u ∈ U, entonces f (x(u)) es la tercera componente de F(F−1(u1, u2, 0)), que esnula. Esto prueba que x(U) ⊆ A∩ S. Recíprocamente, si q ∈ A∩ S entonces f (q) = 0 y,por lo tanto, F(q) = (q1, q2, 0), de forma que (q1, q2) ∈ U y x(q1, q2) = F−1(q1, q2, 0) = q.Concluimos que x(U) = A ∩ S, así que x(U) es un abierto de S. Como p ∈ A y p ∈ S,vemos además que x(U) contiene a p.
2

Finalmente, la proyección π : (x1, x2, x3) ∈ R3 7→ (x1, x2) ∈ R2 es continua yπ(F(A ∩ S)) = U. Podemos entonces considerar la restricción π F : A ∩ S→ U, quees continua y que claramente es la función inversa a la correstricción x : U → A∩ S.
1.1.5. Por ejemplo, usando esta proposición podemos mostrar que la esfera unidadde R3, esto es, el conjunto S2 de los puntos (x, y, z) ∈ R3 tales que
x2 + y2 + z2 = 1
es una superficie. En efecto, la función f : (x, y, z) ∈ R3 7→ x2 + y2 + z2 − 1 ∈ R esdiferenciable, claramente S2 = p ∈ R3 : f (p) = 0, y para cada p = (x, y, z) ∈ S2
es ∇ f (p) = (2x, 2y, 2z) 6= 0. La Proposición 1.1.4 nos dice entonces que S2 es unasuperficie.
1.1.6. Otra familia de ejemplos es la de los gráficos de funciones:
Proposición. Sea U ⊆ R2 un conjunto abierto y sea f : U → R una función diferenciable. Elconjunto S = (u1, u2, f (u1, u2)) : (u1, u2) ∈ U es una superficie.
Demostración. Sea Ω = U × R, que es un abierto de R3 y consideremos la funcióndiferenciable F : p ∈ Ω 7→ p3 − f (p1, p2) ∈ R. Es claro que S = p ∈ R3 : F(p) = 0.Si p ∈ S, es ∇F(p) = (−∂1 f (p1, p2),−∂2 f (p1, p2), 1) 6= 0 y la Proposición 1.1.4 implica,entonces, que S es una superficie.
Alternativamente, podemos considerar la función
x : u ∈ U 7→ (u1, u2, f (u1, y2)) ∈ R3.
Es inmediato que se trata de una función inyectiva y diferenciable, que los vecto-res ∂1x(u) y ∂2x(u) son linealmente independientes cualquiera sea u ∈ U, y que laimagen de x es S, que es, por supuesto, un abierto de S. Finalmente, la proyecciónπ : (x1, x2, x3) ∈ R3 7→ (x1, x2) ∈ R es continua y se restringe a una función continuaπ : S→ U, que es claramente la función inversa de x : U → x(U).
1.1.7. El siguiente resultado, esencialmente técnico, muestra que toda carta con trazacontenida en una superficie satisface las condiciones de la definición 1.1.2.
Proposición. Sea S ⊆ R3 una superficie. Si x : U → R3 es una carta tal que x(U) ⊆ S,entonces x(U) es abierto en S y la correstricción x : U → x(U) tiene inversa continua. Másaún, para cada u ∈ U existe un abierto W ⊆ R3 y una función diferenciable r : W → R2 conx(u) ∈W ∩ S ⊆ x(U) y tales que x−1(q) = r(q) para todo q ∈W ∩ S.
Demostración. Sean u0 ∈ U y p = x(u0). La hipótesis sobre S implica que existe unacarta y : V → R3 con p ∈ y(V) e imagen y(V) un abierto de S y, en particular, hay unabierto Ω ⊆ R3 tal que Ω ∩ S = y(V).
3

Sea v0 ∈ V tal que y(v0) = p y consideremos la función
y : (v, t) ∈ V ×R 7→ y(v) + t · ∂1x(v) ∧ ∂2x(v) ∈ R3,
que es diferenciable. Es y(v0, 0) = p y los tres vectores
∂1y(v0, 0) = ∂1y(v0), ∂2y(v0, 0) = ∂2y(v0), ∂3y(v0, 0) = ∂1x(v) ∧ ∂2x(v)
son linealmente independientes, así que el teorema de la función inversa nos diceque existen abiertos A ⊆ V × R y B ⊆ Ω con (v0, 0) ∈ A y y(A) = B, y tales quela restricción y : A → B es un difeomorfismo. Como claramente y(V × 0) ⊆ S, esy−1(B ∩ S) ⊆ V × 0.
Como x es una función continua y x(u0) pertenece al abierto B, el conjunto x−1(B)es un abierto de U que contiene a u0. Si π : V ×R → V es la proyección, podemosconsiderar la composición h = π y−1 x : x−1(B)→ V. Si ι : v ∈ V 7→ (v, 0) ∈ V ×R,entonces ι h = y−1 x sobre x−1(B) y, en consecuencia,
Dι(h(u0)) · Dh(u0) = D(ι h)(u0) = D(y−1 x)(u0) = Dy−1(x(u0)) · Dx(u0).
Las transformaciones lineales Dx(u0) y Dy−1(x(u0)) son inyectivas, así que esto implicaque Dh(u0) también lo es. El teorema de la función inversa nos dice entonces que hayabiertos B′ ⊆ x−1(B) y A′ ⊆ V con u0 ∈ B′, A′ × 0 ⊆ A y h(B′) = A′, y tales que larestricción h : B′ → A′ es un difeomorfismo.
Como
x(B′) = (y π y−1 x)(B′) = y(h(B′)) = y(A′)
y y : V → y(V) tiene inversa continua, vemos que x(B′) es un abierto de S que contienea p. Esto nos dice que p es un punto interior de x(U) en S y, en definitiva, que x(U) esun abierto de S.
Para probar que x : U → x(U) tiene inversa continua alcanza con probar la últimaafirmación del enunciado. Consideremos el conjunto W = y(A ∩ π−1(A′)), que esabierto en R3, y la función r = h−1 π y−1 : W → R2. Notemos que
W ∩ S = y(A ∩ π−1(A′)) ∩ S = y(A ∩ π−1(A′) ∩ (V × 0))
= y(A ∩ (A′ × 0)) = y(A′) = x(B′)
y que, en consecuencia, p ∈W ∩ S ⊆ x(U). Por otro lado, si u ∈ B′ es
(r x)(u) = (h−1 π y−1 x)(u) = (h−1 h)(u) = u,
así que la restricción de r a W ∩ S coincide con la función inversa de la restricciónx : B′ → x(B′). Esto completa la prueba de la proposición.
4

U
x−1(B)B′
V
A′
V ×R
A
S B
x
y
ι
π
y
h
Figura 1. La construcción de la prueba de la Proposición 1.1.7.
1.1.8. La aplicación más importante de la Proposición 1.1.7 es el siguiente resultado,que cumple un rol fundamental en toda la teoría. Es, además, la razón por la quepedimos en la definición 1.1.2 la existencia de cartas con inversa continua.
Proposición. Sea S ⊆ R3 una superficie. Si x : U → R3 e y : V → R3 son cartas y ponemosW = x(U) ∩ y(V), entonces la función x−1 y : y−1(W) → x−1(W) es un cambio decoordenadas.
Demostración. Como x e y son cartas, los conjuntos x(U) y y(V) son abiertos de S, asíque también lo es W = x(U) ∩ y(V). Como la correstricción x : U → x(U) es biyectivay tiene inversa continua, el conjunto x−1(W) es un abierto de U; de la misma forma,y−1(W) es un abierto de V. Así, la composición x−1 y : y−1(W) → x−1(W) es unabiyección entre abiertos del plano. Para ver que se trata de un cambio de coordenadasbastará que mostremos que es diferenciable, ya que su inversa es la composicióny−1 x : x−1(W)→ y−1(W) y se aplica a ella el mismo razonamiento.
Sea v ∈ y−1(W) y sea u = x−1(y(v)). De acuerdo a la Proposición 1.1.7 existen unabierto W ⊆ R3 y una función diferenciable r : W → R2 con x(u) ∈ W ∩ S ⊆ x(U) yx−1(q) = r(q) para todo q ∈W ∩ S. Tenemos entonces que x−1 y = r y sobre y−1(W)
y esto implica inmediatamente que x−1 y es diferenciable en v, como queríamos.
5

§1.2. Funciones diferenciables
1.2.1. Sea S ⊆ R3 una superficie. Una función f : S→ Rn es diferenciable si es continuay para cada carta x : U → S con valores en S la composición f x : U → Rn es unafunción diferenciable. Escribimos C∞(S,Rn) al conjunto de todas las funciones S→ Rn
que son diferenciables y, generalmente, C∞(S) en lugar de C∞(S,R).
1.2.2. Proposición. Sea S ⊆ R3 una superficie y sea V ⊆ S un abierto. Si f : S→ Rn es unafunción diferenciable, también lo es la restricción f |V : S→ Rn.
Demostración. Toda carta con valores en V es una carta con valores en S, así que esto esconsecuencia inmediata de la definición.
1.2.3. Para ser diferenciable, una función tiene que satisfacer una condición por cadacarta con traza contenida en la superficie. El siguiente resultado nos dice que, enrealidad, es suficiente bastante menos:
Proposición. Sea S ⊆ R3 una superficie y sea f : S→ Rn una función continua. Entonces fes diferenciable si y solamente si para cada p ∈ S existe una carta x : U → S tal que p ∈ x(U)
y la composición f x : U → Rn es diferenciable.
Demostración. La necesidad de la condición es consecuencia inmediata de la forma enque definimos la diferenciabilidad de funciones S→ Rn y de que todo punto de S estáen la imagen de una carta x : U → R3 con x(U) ⊆ S. Veamos la suficiencia.
Sea entonces f : S→ Rn una función que satisface la condición del enunciado y seax : U → R3 una carta con x(U) ⊆ S. Para ver que f x : U → Rn es diferenciable bastamostrar que es diferenciable en todos los puntos de U.
Fijemos para eso u ∈ U y sea p = x(u). La hipótesis hecha sobre f nos dice queexiste una carta y : V → R3 con p ∈ y(V) ⊆ S y tal que f y es diferenciable. Dela Proposición 1.1.8 sabemos que W = x(U) ∩ y(V) es un abierto de S, que x−1(W)
e y−1(W) son abiertos de R2 y que la función φ = y−1 x : x−1(W) → y−1(W) es uncambio de coordenadas. Como la restricción de f x a x−1(W) coincide con f y φ,que es una función diferenciable, y u ∈ x−1(W), vemos que f x es diferenciable en u,como queríamos.
1.2.4. Una consecuencia directa de la Proposición 1.2.3 es el siguiente criterio «local»de diferenciabilidad:
Proposición. Sea S ⊆ R3 una superficie y sea f : S→ Rn una función continua. Si para todop ∈ S existe un abierto V ⊆ S con p ∈ V y tal que la restricción f |V : V → Rn es una funcióndiferenciable, entonces f es una función diferenciable.
Demostración. Sea p ∈ S. Por hipótesis, existe un abierto V ⊆ S tal que p ∈ V yf |V es diferenciable. La necesidad de la condición de la Proposición 1.2.3 aplicadaa f |V : V → Rn implica que existe una carta x : U → V tal que p ∈ x(U) y f |V x
6

es diferenciable. Como x es una carta con valores en S y claramente f x = f |V x,usando ahora la suficiencia de la condición de esa proposición aplicada a f : S→ Rn
podemos concluir que f es diferenciable.
1.2.5. Una forma de obtener funciones diferenciables sobre una superficie es restringira ella funciones diferenciables definidas sobre el espacio ambiente:
Proposición. Sea S ⊆ R3 una superficie. Si Ω es un abierto de R3 tal que S ⊆ Ω yf : Ω→ Rn es una función diferenciable, entonces la restricción f |S : S→ Rn es una funcióndiferenciable.
Demostración. Si x : U → R3 es una carta con x(U) ⊆ S, entonces la composición f |S xcoincide con f x y esta última función es claramente diferenciable. Esto nos diceque f |S es diferenciable, como se afirma en la proposición.
1.2.6. Sean S una superficie y x : U → S una carta con valores en S. Si i ∈ 1, 2 yπi : R2 → R es la proyección i-ésima, la composición xi = πi x−1 : x(U)→ R es unafunción diferenciable. Llamamos a las dos funciones x1 y x2 las funciones coordenadasasociadas a la carta x. Observemos que x−1(p) = (x1(p), x2(p)) para todo p ∈ x(U).
§1.3. Espacios tangentes
1.3.1. Sea S ⊆ R3 es una superficie y sea p ∈ S. Un vector X ∈ R3 es tangente a S en psi existen ε > 0 y una función diferenciable α : (−ε, ε) → S con α(0) = p y α′(0) = X.Escribimos TpS al conjunto de todos los vectores tangentes a S en p.
1.3.2. Proposición. Sea S ⊆ R3 una superficie, sea p ∈ S y sea x : U → R3 una carta conp ∈ x(U) ⊆ S. Si u ∈ U es tal que x(u) = p, entonces TpS = Dx(u)(R2). En particular, elconjunto TpS es un subespacio vectorial de R3 de dimensión 2 y tiene a ∂1x(u), ∂2x(u) comobase.
En vista de esto, llamamos a TpS el plano tangente a S en p.
Demostración. Según la Proposición 1.1.7, hay un abierto W de R3 y una funcióndiferenciable r : W → R2 con p ∈W ∩ S ⊆ x(U) y x−1(q) = r(q) para cada q ∈W ∩ S.
Supongamos primero que X ∈ TpS, de manera que existen ε > 0 y una funcióndiferenciable α : (−ε, ε) → S con α(0) = p y α′(0) = X. Como p ∈ W, a menos decambiar ε por un número positivo más chico, podemos suponer que α toma valoresen W, y entonces podemos considerar la composición β = r α : (−ε, ε) → R2, quetoma valores en U. Como α = x β, es
X = α′(0) = (x β)′(0) = Dx(u)(β′(0)) ∈ Dx(u)(R2).
7

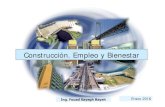
Figura 2. El cono del ejemplo 1.3.3.
Recíprocamente, si Y ∈ R2 y ε > 0 es suficientemente chico como para que la funciónγ : t ∈ (−ε, ε) 7→ u + tY ∈ R2 tome valores en U, la composición x γ : (−ε, ε) → Ses tal que (x γ)(0) = p y (x γ)′(0) = Dx(u)(γ′(0)) = Dx(u)(Y): esto muestra queDx(u)(Y) ∈ TpS. Concluimos así que TpS = Dx(u)(R2).
Como R2 tiene dimensión 2 y la función lineal Dx(u) : R2 → R3 es inyectiva,dim TpS = 2. Más aún, como Dx(u) es inyectiva, la imagen Dx(u)(e1), Dx(u)(e2) dela base estándar e1, e2 de R2 es una base de Tp. Como Dx(u)(ei) = ∂ix(u) para cadai ∈ 1, 2, esto completa la prueba de la proposición.
1.3.3. Esta proposición puede ser usada para mostrar que ciertos subconjuntos de R3 noson superficies. Por ejemplo, consideremos el conjunto S de los puntos (x, y, z) de R3
tales que x2 + y2 = z2, ilustrado en la figura 2, y el punto p = (0, 0, 0) ∈ S. Para cadaθ ∈ R la función
αθ : t ∈ R 7→ (t cos θ, t sin θ, t) ∈ R3
es diferenciable, toma valores en S, y tiene αθ(0) = p y α′θ(0) = (cos θ, sin θ, 1). Si Sfuese una superficie, entonces el subespacio TpS de R3 tendría dimensión 2 y con-tendría los vectores α′0(0) = (1, 0, 1), α′π/2(0) = (0, 1, 1) y α′π(0) = (−1, 0, 1), que sonlinealmente independientes: esto es absurdo.
1.3.4. Analíticamente, el rol de los vectores tangentes a una superficie es el de dardirecciones con respecto a las cuales podemos calcular derivadas direccionales defunciones:
8

Proposición. Sea S ⊆ R3 una superficie y sean p ∈ S y X ∈ TpS.(i) Si f ∈ C∞(S,Rn), ε > 0 y α : (−ε, ε)→ S es una función diferenciable con α(0) = p y
α′(0) = X, entonces la composición f α : (−ε, ε)→ Rn es diferenciable y el elemento( f α)′(0) de Rn depende solamente de X y de f , y no de la elección de ε y α. Podemos,en consecuencia, escribirlo X f .
(ii) La función f ∈ C∞(S,Rn) 7→ X f ∈ Rn es lineal.(iii) Si f ∈ C∞(S) y g ∈ C∞(S,Rn) entonces X( f g) = X f · g(p) + f (p) · Xg.
Demostración. Supongamos que ε > 0 y que α, β : (−ε, ε) → S son dos funcionesdiferenciables con α(0) = β(0) = p y α′(0) = β′(0) = X. Sea x : U → R3 una cartacon p ∈ x(U) ⊆ S y sea W un abierto de R3 y r : W → R2 una función diferenciable talque p ∈ W ∩ S ⊆ x(U) y x−1(q) = r(q) para cada q ∈ W ∩ S. A menos de cambiar ε
por un número positivo más chico, podemos suponer que α y β toman valores en W, yentonces es f α = f x r α y lo mismo para β, de manera que
( f α)′(0) = ( f x r α)′(0) = D( f x r)(α(0)) · α′(0)= D( f x r)(α(0)) · β′(0) = ( f x r β)′(0)
= ( f β)′(0)
Esto prueba la afirmación (i).Fijemos ahora ε > 0 y una función diferenciable α : (−ε, ε) → S tal que α(0) = p
y α′(0) = X. Si f , g ∈ C∞(S,Rn) y λ ∈ R, entonces
X( f + λg) =(( f + λg) α
)′(0) = ( f α)′(0) + λ(g α)′(0) = X f + λXg,
y esto muestra que la función de enunciado es lineal. Finalmente, si f ∈ C∞(S) yg ∈ C∞(S,Rn), entonces
X( f g) =(( f g) α
)′(0) =
(( f α) · (g α)
)′(0)
= ( f α)′(0) · (g α)(0) + ( f α)(0) · (g α)′(0)
= X f · g(p) + f (p) · Xg,
como se afirma en (iii).
1.3.5. El espacio tangente a una superficie en uno de sus puntos depende solamente deun entorno de éste en la superficie. Más precisamente, tenemos el siguiente resultado:
Proposición. Sea S ⊆ R3 una superficie, sea V ⊆ S un abierto de S y sea p ∈ V.(i) Los espacios tangentes TpV y TpS coinciden.
(ii) Si X ∈ TpS y f ∈ C∞(S,Rn), entonces X f = X( f |V).
9

Demostración. Sea x : U → V una carta con valores en V tal que p ∈ x(V) y sea u ∈ Utal que x(u) = p. Por supuesto, la función x es una carta con valores en S. La Proposi-ción 1.3.2 nos dice que tanto TpV como TpS coinciden con el subespacio Dx(u)(R2), yesto prueba la primera afirmación de la proposición.
Sea ahora X ∈ TpS y sean ε > 0 y α : (−ε, ε) → S diferenciable tal que α(0) = p yα′(0) = X. Como V es abierto en S y α es continua, a menos de reemplazar a ε porun número positivo más chico y restringir α, podemos suponer que α toma valoresen V. En ese caso es f α = ( f |V) α para toda función f ∈ C∞(S,Rn), y de esto sigueinmediatamente la segunda afirmación de la proposición.
1.3.6. Cuando tenemos una carta que parametriza un entorno de un punto, podemosexpresar en coordenadas tanto a los vectores como a la acción de estos sobre lasfunciones:
Proposición. Sea S ⊆ R3 una superficie y sean p ∈ S y X ∈ TpS.(i) Sea x : U → S una carta con p ∈ x(U) y sea u ∈ U tal que x(u) = p. Existen escalares
X1, X2 ∈ R tales que X = ∑i Xi · ∂ix(u) y para cada función f ∈ C∞(S,Rn) se tieneque X f = ∑i Xi · ∂i( f x)(u).
(ii) Sea y : V → S otra carta con p ∈ y(V) y sean v ∈ V e Y1, Y2 ∈ R tales que y(v) = p yX = ∑i Yi · ∂iy(v). Si ponemos W = x(U)∩y(V) y φ = x−1 y : y−1(W)→ x−1(W)
es la función de cambio de coordenadas como en la Proposición 1.1.8, entonces v ∈ y−1(W)
y para cada j ∈ 1, 2 vale que X j = ∑i ∂iφj(v) ·Yi.
Demostración. (i) Que existen los escalares X1 y X2 tales que X = ∑i Xi · ∂ix(u) esconsecuencia inmediata de que el conjunto ∂1x(u), ∂2x(u) es una base de TpS. Seaf ∈ C∞(S,Rn). Existe ε > 0 tal que la función
β : t ∈ (−ε, ε) 7→ u + t(X1e1 + X2e2) ∈ R2
toma valores en U, y entonces la composición α = x β : (−ε, ε)→ S es diferenciable,α(0) = p y
α′(0) = Dx(u)(X1e1 + X2e2) = ∑i
Xi · Dx(u)(ei) = ∑i
Xi · ∂ix(u) = X,
de manera que
X f = ( f α)′(0) = ( f x β)′(0) = D( f x)(u)β′(0)
= D( f x)(u)(X1e1 + X2e2) = ∑i
Xi · D( f x)(u)(ei)
= ∑i
Xi · ∂i( f x)(u).
10

(ii) Sobre y−1(W) es y = x φ, así que para cada i ∈ 1, 2 y cada w ∈ y−1(W) es∂iy(w) = ∑j ∂iφ
j(v) · ∂jx(φ(v)). Como claramente v ∈ y−1(W) y φ(v) = u, se sigue deesto que
∑j
X j · ∂jx(u) = X = ∑i
Yi · ∂iy(v) = ∑i,j
Yi∂iφj(v) · ∂jx(u)
y, como ∂1x(u), ∂2x(u) es un conjunto linealmente independiente, que en definitivaX j = ∑i ∂iφ
j(v) ·Yi, como afirma en enunciado.
§1.4. Campos tangentes
1.4.1. Si S ⊆ R3 es una superficie, un campo tangente a S es una función X : S → R3
tal que X(p) ∈ TpS para todo p ∈ S. Escribimos X(S) al conjunto de todos los campostangentes a S que son diferenciables.
1.4.2. Si S ⊆ R3 es una superficie, X : S → R3 un campo tangente a S y V ⊆ S unabierto, entonces la restricción X|V : V → R3 de X a V es un campo tangente a V, quees diferenciable si X lo es. Esto es consecuencia inmediata de las Proposiciones 1.2.2y 1.3.5.
1.4.3. Proposición. Sea S ⊆ R3 una superficie y sea x : U → S una carta. Para cadai ∈ 1, 2 hay un campo tangente diferenciable xi ∈ X(x(U)) tal que xi(x(u)) = ∂ix(u) paratodo u ∈ U.
Llamamos a x1 y a x2 los campos coordenados asociados a la carta x.
Demostración. Fijemos i ∈ 1, 2. Como x : U → x(U) es una biyección con inversacontinua, la función xi : p ∈ x(U) 7→ ∂ix(x−1(p)) ∈ R3 es continua. Es, de hecho,diferenciable: para verlo basta observar que la composición xi x : U → R3 es unafunción diferenciable, lo que es claro ya que coincide con la función ∂ix. Finalmente,que para cada p ∈ x(U) el vector xi(p) = ∂ix(x−1(p)) pertenece a TpS es consecuenciainmediata de la última afirmación de la Proposición 1.3.2.
1.4.4. La acción de los vectores tangentes sobre las funciones construida en la Proposi-ción 1.3.4 tiene una extensión natural a los campos: si X : S→ R3 es un campo tangentey f ∈ C∞(S,Rn), tiene sentido considerar la función X f : p ∈ S 7→ X(p) f ∈ Rn. Usandoesta construcción podemos dar una caracterización útil de la diferenciabilidad de uncampo.
Proposición. Sea S ⊆ R3 una superficie y sea X : S → R3 un campo tangente a S. Lassiguientes condiciones son equivalentes:
(a) El campo X es diferenciable.
11
(b) Si x : U → S es una carta y X1, X2 : U → R son las funciones unívocamentedeterminadas por la condición de que sea (X x)(u) = ∑i Xi(u)xi(u) para todo u ∈ U,entonces X1, X2 ∈ C∞(x(U)).
(c) Para todo abierto V de S y toda función f ∈ C∞(V,Rn) se tiene que X f ∈ C∞(V,Rn).
Demostración. (a)⇒ (b) Sea X : S → R3 un campo tangente diferenciable sobre S, seax : U → S una carta y sean x1, x2 : x(U)→ R3 los campos cuya existencia se afirma enla Proposición 1.4.3. De acuerdo a la Proposición 1.3.2, para cada u ∈ U el conjuntox1(x(u)), x2(x(u)) es una base de Tx(u)S, así que hay escalares X1(u), X2(u) ∈ R talesque X(x(u)) = ∑i Xi(u) · xi(x(u)). Esto define, de hecho, funciones X1, X2 : U → R.
La función matricial A : U → M3(R) tal que para cada u ∈ U la matriz A(u) tienepor columnas a los vectores x1(x(u)), x2(x(u)) y xi(x(u)) ∧ x2(x(u)) es diferenciabley sus valores son matrices inversibles, ya que x es una carta. Se sigue de esto que lafunción u ∈ U 7→ A(u)−1X(x(u)) ∈ R3 es diferenciable y como para todo u ∈ U es
A(u)−1X(x(u)) =
X1(u)X2(u)
0
,
vemos que X1 y X2 son funciones diferenciables.(b) ⇒ (c) Sean X ∈ X(S), V ⊆ S un abierto y f ∈ C∞(V,Rn). Sea x : U → V
una carta, sean x1, x2 : x(U) → R3 los campos coordenados asociados a x, y seanX1, X2 : U → R las funciones tales que X(x(u)) = ∑i Xi(u) · xi(x(u)) para cada u ∈ U,que por hipótesis son diferenciables. De acuerdo a la Proposición 1.3.6, para cadau ∈ U tenemos que
(X f )(x(u)) = X(x(u)) f = ∑i
Xi(u) · ∂i( f x)(u),
de manera que X f x = ∑i Xi · ∂i( f x) y entonces claramente X f x : U → Rn es unafunción diferenciable. Como esto pasa cualquiera sea la carta x, podemos concluir quela función X f misma es diferenciable.
(c)⇒ (a) Tenemos que mostrar que si el campo X : S → Rn satisface la condiciónde (c), su composición con cualquier carta con valores en S es una función diferenciable.Sea entonces x : U → S una carta y sean x1, x2 ∈ C∞(x(U)) las funciones coordenadasde x, de manera que u = (x1(x(u)), x2(x(u)) para todo u ∈ U. La hipótesis nos diceque Xx1 y Xx2 son funciones diferenciables sobre x(U).
Ahora bien, si X1, X2 : U → R son tales que
X(x(u)) = ∑i
Xi(u) · xi(x(u)) (1)
12

para cada u ∈ U y j ∈ 1, 2, es
(Xxj)(u) = X(u)xj = ∑i
Xi(u) · ∂i(xj x)(u) = ∑i
Xi(u) · ∂iuj = X j(u)
para todo u ∈ U, así que X j es una función diferenciable. Se sigue entonces de laigualdad (1) que la composición X x es una función diferenciable.
§1.5. Formas diferenciales
1.5.1. Si S ⊆ R3 es una superficie y p ∈ S, una 1-forma diferencial en p con valoresen Rn es una función lineal ω : TpS→ Rn. Escribimos T∗p S al espacio vectorial de todaslas 1-formas diferenciales en p con valores en R y lo llamamos espacio cotangente a Sen p; observemos que T∗p S es el espacio vectorial dual a TpS.
1.5.2. El ejemplo que motiva esta definición es el siguiente:
Proposición. Sea S ⊆ R3 una superficie y sean p ∈ S y f ∈ C∞(S,Rn). La funcióndp f : X ∈ TpS 7→ X f ∈ Rn es una 1-forma diferencial en p con valores en Rn.
Llamamos a dp f la diferencial de f en p.
Demostración. Sean X, Y ∈ TpS y λ ∈ R, y sea x : U → S una carta tal que p ∈ x(U).Hay escalares X1, X2, Y1, Y2 ∈ R tales que X = ∑i Xi · xi(p) e Y = ∑i Yi · xi(p), yentonces X + λY = ∑i(Xi + λYi) · xi(p). De la Proposición 1.3.6 sabemos que
X f = ∑i
Xi · ∂i( f x), Y f = ∑i
Yi · ∂i( f x)
y que
(X + λY) f = ∑i(Xi + λYi) · ∂i( f x),
así que claramente dp f (X + λY) = dp f (X) + λdp f (Y). Esto muestra que dp f es unafunción lineal y prueba la proposición.
1.5.3. De la misma forma en que pasamos de vectores tangentes en un punto a campostangentes en toda una superficie, procedemos con las 1-formas diferenciales. Si S ⊆ R3
es una superficie, una 1-forma diferencial sobre S con valores en Rn es una asignación ω
que a cada p ∈ S hace corresponder una 1-forma diferencial ω(p) : TpS → Rn en pcon valores en Rn. Decimos que esa 1-forma ω es diferenciable si para cada campotangente diferenciable X ∈ X(S) la función
ω(X) : p ∈ S 7→ ω(p)(X(p)) ∈ Rn
es diferenciable. Escribimos Ω1(S,Rn) al conjunto de todas las 1-formas diferencialesdiferenciables sobre S con valores en Rn y Ω1(S) en lugar de Ω1(S,R).
13

1.5.4. Proposición. Sea S ⊆ R3 una superficie y sea V ⊆ S un abierto. Si ω es una 1-formadiferencial diferencial sobre S con valores en Rn, entonces la restricción ω|V de ω a V es una1-forma diferencial diferenciable sobre S con valores en Rn.
Demostración. To be done
1.5.5. Proposición. Sea S ⊆ R3 una superficie y sea f ∈ C∞(S,Rn). Hay una 1-formadiferencial diferenciable d f ∈ Ω1(S,Rn) tal que d f (p) = dp f : TpS→ Rn para cada p ∈ S.
Llamamos a d f la diferencial de f en S.
Demostración. Solamente hay que probar que la 1-forma diferencial d f definida en elenunciado es diferenciable, y para ello que para todo campo diferenciable X ∈ X(S)la función d f (X) = X f es diferenciable. Esto último es consecuencia inmediata de laProposición 1.4.4.
1.5.6. Como con todo, podemos dar descripciones relativas a una carta de las 1-formasdiferenciales:
Proposición. Sea S ⊆ R3 una superficie, sea x : U → S una carta, y sean x1, x2 ∈ X(x(U))
y x1, x2 : U → R los campos coordenados y las funciones coordenadas asociados a x, respectiva-mente.
(i) Si p ∈ x(U), entonces dpx1, dpx2 es una base del espacio cotangente T∗p S que es duala la base x1(p), x2(p) de TpS.
(ii) Si ω es una 1-forma diferencial sobre x(U), entonces existen funciones ω1, ω2 : U → Runívocamente determinadas por ω tales que ω(p) = ∑i ωi(x−1(p)) · dpxi para cadap ∈ x(U) y ω es diferenciable si y solamente si las funciones ω1 y ω2 son diferenciales.
Demostración. (i) Basta mostrar que dpxi(xj(p)) = δij para cada i, j ∈ 1, 2, y esto sigue
de que
dpxi(xj(p)) = xj(p)xi = ∂j(xi x)(p) = δij,
ya que xi x es la función (u1, u2) ∈ U 7→ ui.(ii) La existencia de las funciones ω1 y ω2 es consecuencia inmediata de que
dpx1, dpx2 es una base de TSp , como afirma la primera parte de la proposición.
Si la 1-forma ω es diferenciable, entonces para cada j ∈ 1, 2 la función ω(xj) esdiferenciable y, como
ω(xj)(p) =(∑
iωi(x−1(p)) · dpxi
)(xj) = ∑
iωi(x−1(p)) · dpxi(xj)
= ∑i
ωi(x−1(p)) · δij = ωj(x−1(p)),
para cada p ∈ x(U), esto implica que ωj = ω(xj) x es diferenciable.
14

Recíprocamente, si las funciones ω1 y ω2 son diferenciables y X ∈ X(x(U)) es uncampo tangente diferenciable, entonces sabemos de la Proposición 1.4.4 que existenfunciones diferenciables X1, X2 : U → R tales que X(p) = ∑j X j(x−1(p)) · xj(p) paracada p ∈ x(U), y entonces
ω(X)(p) = ω(p)(X(p)) =(∑
iωi(x−1(p) · dpxi
)(∑
jX j(x−1(p)) · xj(p)
)= ∑
i,jωi(x−1(p))X j(x−1(p)) · dpxi(xj(p))
= ∑i,j
ωi(x−1(p))X j(x−1(p)) · δij
= ∑i
ωi(x−1(p))Xi(x−1(p)),
de manera que ω(X) x = ∑i ωiXi, que claramente es una función diferenciablesobre U.
§1.6. Orientabilidad
1.6.1. Una orientación de una superficie S ⊆ R3 es una función diferenciable n : S→ R3
tal que ‖n(p)‖ = 1 y n(p) ⊥ TpS para todo p ∈ S. Una superficie es orientable si poseeuna orientación.
1.6.2. Proposición. Si una superficie S ⊆ R3 es conexa y orientable, entonces existen exacta-mente dos orientaciones n1, n2 : S→ R3 y, de hecho, n2 = −n1.
Demostración. Supongamos que n1, n2 : S→ R3 son dos orientaciones de S.Si p ∈ S, entonces los vectores n1(p) y n2(p) pertenecen al subespacio (TpS)⊥ de R3
ortogonal al espacio tangente TpS. Como dim(TpS)⊥ = 1, esto implica que existe unescalar λ(p) ∈ R tal que n2(p) = λ(p)n1(p) y tomando normas en ambos lados deesta igualdad vemos inmediatamente que λ(p) ∈ ±1. Así, tenemos una funciónλ : S → ±1 tal que n1 = λn1. Como λ(p) = 〈n1(p), n2(p)〉 para todo p ∈ S ylas funciones n1 y n2 son continuas, la función λ es claramente continua. Usandola hipótesis de que S es conexa, podemos concluir entonces que λ es constante y, endefinitiva, que n2 = ±n1. Esto muestra que hay a lo sumo dos orientaciones de S.
Por otro lado, si n : S→ R3 es una orientación de S, entonces −n : S→ R es otradistinta, así que hay, de hecho, exactamente dos.
1.6.3. La orientabilidad es una propiedad que es heredada por los abiertos:
Proposición. Sea S ⊆ R3 una superficie y sea V ⊆ S un abierto. Si S es orientable, entonces Vtambién lo es.
15

Demostración. En efecto, si n : S→ R3 es una orientación de S, entonces la restricciónn|V → R3 es una orientación de V. Esto es consecuencia de que esa restricción esdiferenciable, de acuerdo a la Proposición 1.2.2, y de que TpV = TpS para todo p ∈ V,en vista de la primera parte de la Proposición 1.3.5.
1.6.4. Por otro lado, la orientabilidad es una propiedad esencialmente global. De hecho,toda superficie es localmente orientable:
Proposición. Sea S ⊆ R3 una superficie. Si x : U → S es una carta con valores en S, entoncesel abierto x(U) es una superficie orientable.
Demostración. Consideremos la función n : x(U)→ R3 tal que para cada p ∈ x(U) es
n(p) =x1(p) ∧ x2(p)‖x1(p) ∧ x2(p)‖ .
Notemos que esto tiene sentido, ya que para cada p ∈ x(U) los vectores x1(p) y x2(p)son linealmente independientes, y que se trata de una función diferenciable. Se sigueinmediatamente de la construcción de n que ‖n(p)‖ = 1 y que n(p) ⊥ Tp(x(U)) paracada p ∈ x(U), así que n es una orientación de x(U).
1.6.5. Las superficies que se obtienen como en la Proposición 1.1.4 son orientables:
Proposición. Sea W ⊆ R3 un abierto, sea f : W → R una función diferenciable, seaS = p ∈ W : f (p) = 0. Si para cada p ∈ S es ∇ f (p) 6= 0, de manera que S es unasuperficie, entonces S es orientable.
Demostración. El conjunto W ′ = p ∈ W : ∇ f (p) 6= 0 es un abierto de R3 tal queS ⊆W ′ ⊆W, y la función n : W ′ → R3 tal que
n(p) =∇ f (p)‖∇ f (p)‖
para todo p ∈W ′ es diferenciable. La restricción n|S : S→ R3 es entonces diferenciabley, claro, toma valores de norma 1. Si p ∈ S y X ∈ TpS, entonces existen ε > 0 yuna función diferenciable α : (−ε, ε) → S tal que α(0) = p y α′(0) = X y, como lacomposición f α es idénticamente nula, tenemos que
0 = ( f α)′(0) = D f (p)(X) = 〈∇ f (p), X〉 = ‖∇ f (p)‖ · 〈n(p), X〉,
de manera que n ⊥ X: esto muestra que n(p) ⊥ TpS. Así, la función n es unaorientación de la superficie S.
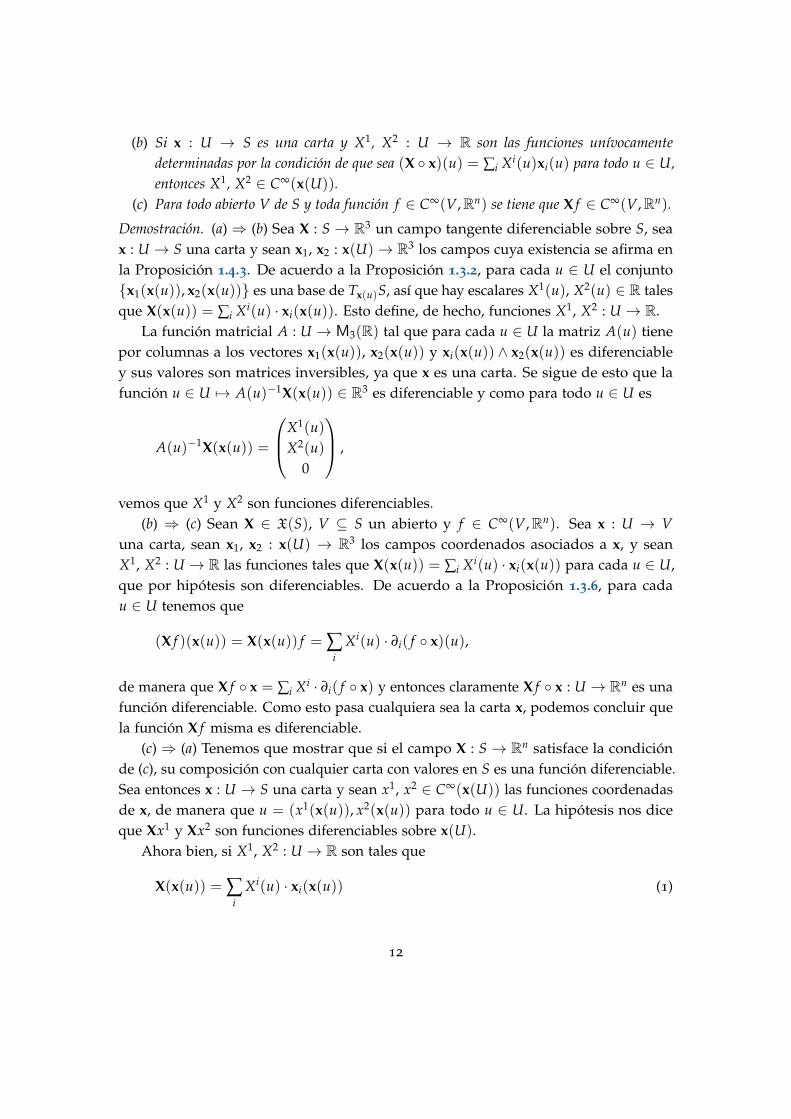
1.6.6. Mostremos dando un ejemplo que no toda superficie es orientable. Consideremosla función s : (−1, 1)×R→ R3 tal que
s(t, θ) =
(2 + t cos 12 θ) cos θ
(2 + t cos 12 θ) sin θ
t sin 12 θ
.
16

Figura 3. La banda de Möbius.
y el conjunto S = s(t, θ) : t ∈ (−1, 1), θ ∈ R, al que llamamos banda de Möbius yque puede verse en la figura 3.
Para cada α ∈ R, sea Ωα = (x, y, z) ∈ R3 : x cos α + y sin α > 0, que es un abiertode R3, sean φα, τα : Ωα → R las funciones tales que
φα(x, y, z) = α + arcsin −x sin α + y cos α√x2 + y2
,
τα(x, y, z) = (x cos φα(x, y, z) + y sin φα(x, y, z)− 2) cos 12 φα(x, y, z)
+ z sin 12 φα(x, y, z),
que son continuas, sea Uα = (−1, 1)× (α− 12 π, α+ 1
2 π) y sea xα : Uα → R3 la restricciónde s a Uα. Es fácil ver que la traza de xα(Uα) = Uα ∩ S, que xα es inyectiva y que lafunción inversa de la correstricción xα : Uα → xα(Uα) es la restricción a xα(Uα) de lafunción (x, y, z) ∈ Ωα 7→ (τα(x, y, z), φα(x, y, z)) ∈ R2. Como S =
⋃α∈R xα(Uα), esto es
suficiente para concluir que S es una superficie, como queríamos.Supongamos, para llegar a un absurdo, que S es orientable, de manera que existe
una orientación n : S→ R3. Consideremos las funciones diferenciables
σ : θ ∈ R 7→ s(0, θ) ∈ S, ν : θ ∈ R 7→ ∂1s(0, θ) ∈ R3.
Como σ toma valores en S, para cada θ ∈ R el vector σ′(θ), que no es nulo, es unelemento de Tσ(θ)S. Por otro lado, para cada θ ∈ R es también ν(θ) ∈ TpS y, de hecho,el conjunto σ′(θ), ν(θ) es linealmente independiente. Como consecuencia de esto, la
17

función
δ : θ ∈ R 7→ det(σ′(θ), ν(θ), n(σ(θ))
)∈ R,
que es diferenciable, no se anula en ningún punto de su dominio. Ahora bien,como las función σ es periódica de periodo 2π, tenemos que σ′(0) = σ′(2π) yn(σ(0)) = n(σ(2π)), y calculando vemos que ν(0) = −ν(2π): esto implica quelos números δ(0) y δ(2π) tienen signos distintos, lo que es imposible.
§1.7. Ejercicios
1.7.1. Si S ⊆ R3 es una superficie y p ∈ S, entonces existen abiertos Ω ⊆ R3 y U ⊆ R2,una función diferenciable f : U → R y un movimiento euclídeo h : R3 → R3 tal que si
S f = (u1, u2, f (u1, u2)) : (u1, u2) ∈ U
es el gráfico de f , entonces h(S f ) = Ω ∩ S. Esto significa que toda superficie eslocalmente el gráfico de una función.
1.7.2. Dé un ejemplo para mostrar que no es cierto que la traza de una carta sea unasuperficie. Pruebe que, sin embargo, si x : U → R3 es una carta y u ∈ U, entonces hayun abierto V ⊆ U con u ∈ V y tal que x(V) una superficie.
18