
Fundamentos de Teoria de Control
360
FUNDAMENTOS DE CONTROL APLICADOS AL GENERADOR SINCRONICO 1 Fundamentos de Control del Generador Sincrónico 2014 USB Prof. Juan Bermúdez GENERADOR SINCRONICO Prof. Juan Bermudez, USB [email protected]
-
Upload
adrian-alejandro-sotillo-rojas -
Category
Documents
-
view
83 -
download
9
description
Fundamentos de Teoria de Control
Transcript of Fundamentos de Teoria de Control
-
FUNDAMENTOS DE CONTROL APLICADOS AL GENERADOR SINCRONICO
1Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
GENERADOR SINCRONICO
Prof. Juan Bermudez, [email protected]
-
Filosofa del control pag 1Fasor generalizado pag 7 Transformada de Laplace 9Circuito RL como retardo de primer orden pag 16Circuito RC pag 33Circuito RLC como orden dos fundamental pag 44Lazo abierto y lazo cerrado 62Inluencia de polos y ceros 70Impacto Condiciones Iniciales 81
FUNDAMENTOS DE CONTROL APLICADOS AL GENERADOR SINCRONICO
2Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Analogia RLC versus Maquina Sicronica 103Bloques de adelanto-atraso-PID - 94Autovalores y autovectores pag 105Relacin de amortiguacin 144Funciones de transferencia versus espacio de estados pag 145Aplicaciones al GS 161Control de velocidad e intercambios 166Control de voltaje AVR 229Maquina con AVR y PSS 270Operacin en paralelo de Generadores sincrnicos / Distribucin de Q - 300
-
FILOSOFIA GENERALDE TEORIA
UN SISTEMA FUNCIONA EN UN AMBITO DADO PRODUCIENDO UNA RESPUESTA EN
EL TIEMPO ANTE UNA EXCITACION EXTERNA
ES SU DESEMPEO ADECUADO SEGUN LO QUE ARROJA SU SUPERVISION EN TIEMPO
REAL?
3Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
DE TEORIA DE
CONTROL SI EL DESEMPEO NO ES OPTIMO : TOMAR ACCIONES PARA MEJORAR EL DESEMPEO
DEFINIR Y COMANDAR CAMBIOS EN LAS VARIABLES DE CONTROL DEL SISTEMA PARA FORZAR UN MEJOR DESEMPEO . INCLUIR UN
COMPENSADOR QUE MEJORE EL PERFORMANCE DEL SISTEMA
-
CONTROLAR
EL SISTEMA DEBE IR HACIA EL ESTADO (CONDICION) QUE SE DESEE
EL SISTEMA NO DEBE DESESTABILIZARSE
NO DEBE HABER ERROR EN REGIMEN PERMANENTE
4Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
LA RESPUESTA TRANSITORIA PREFERIBLEMENTE NO DEBE SER
OSCILATORIA
EL TIEMPO DE RESPUESTA DEBE SER RAZONABLEMENTE CORTO
EL SOBREPASO TRANSITORIO NO DEBE ARRIESGAR LOS LIMITES OPERATIVOS
-
Controladores PID
En la industria actual para eliminar las excursiones en una salidaque se est controlando, los errores entre la referencia y la salidase procesan a travs de un controlador PID, en lazo cerrado. Larama P produce una seal proporcional al error. La rama Dproduce una seal acelerante proporcional a la derivada del error yla rama I produce una seal proporcional a la integral del error,para que eliminar el error en rgimen permanente.
5Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
para que eliminar el error en rgimen permanente.Es vital no solo instalar los controladores PID (hoy en da denaturaleza numrica en PLCs), sino tambin sintonizarlos paraobtener la respuesta mas adecuada.Para entender estos conceptos en el contexto del generadorsincrnico, deben entenderse las funciones de transferencia y surelacin con el espacio de estados, para el control de velocidad yvoltaje
-
Las tradicionales funciones de transferencia en el dominio de lafrecuencia compleja, reclaman el uso de la TRANSFORMADA deLAPLACE, para convertir las ecuaciones diferenciales enalgebraicas.Otro aspecto vital para entender en comportamiento de un sistemaes calcular los AUTOVALORES de su matriz de coeficientes A enel espacio de estados. Los autovalores constituyen el cdigogentico de un sistema y se pueden ubicar estratgicamente con el
6Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
gentico de un sistema y se pueden ubicar estratgicamente con eluso de controladores y su correcta sintonizacin.Las funciones de transferencia son muy tiles para entender lalgica fundamental de control, pero para sistemas de grandimensin la formulacin debe hacerse en el espacio de estadosdirectamente, desarrollando las ecuaciones diferenciales delsistema.
-
Ecuaciones Diferenciales y Funciones de Transferencia
Todo sistema dinmico esta regido por ecuaciones diferenciales, quepueden ser lineales o no lineales. Dependiendo del sistema pueden haberdecenas de ecuaciones diferenciales, mltiples variables de entrada(referencias), mltiples variables de estado y mltiples salidas.Ante grandes perturbaciones hay que integrar las ED para ver lasrespuestas en el tiempo e inferir su buen/mal comportamiento. Tcnicas deintegracin explicita (Runge-Kutta) o implcita (Trapezoidal) pueden ser
7Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
integracin explicita (Runge-Kutta) o implcita (Trapezoidal) pueden serutilizadas para tal fin. Ante pequeas perturbaciones, es comn usar lastcnicas de autovalores y autovectores (en sistemas lineales o linealizados)para inferir el comportamiento del sistema.Si el sistema bajo estudio es del tipo mono-entrada / mono salida (SISO), esprudente trabajar con Funciones de Transferencia obtenidas de la EDrespectiva. La ventaja de esta alternativa es el entendimiento elemental delas clsicas herramientas de Teora de Control, tales como LugarGeomtrico de las Races, Realimentacin, Compensadores, Metodologade Bode, etc.
-
DEFINICION DE FASOR GENERALIZADO
t
j(w t )t
j(w t )t
j t jw t
Sea la funcion periodica amortiguada :v(t) V max cos(w t ), negativo
V max real( )real( V max )
e
e e
e e
e e
+
+
+
= +
=
=
= =
Conclusin:Con funciones peridicasse puede usar calculofasorial aun en rgimendinmico, considerandoque s es una frecuencia
8Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
j t jw t
( jw) treal( V max )real( )
Donde se definen :s jw frecuencia compleja r
e e
V e
+
+
= =
=
= + =
r
jegimen transitorio
V max V maxSi 0 amortiguacion nula
s j w regimen permanente
V Vfasor e
= =
=
=
=
r
que s es una frecuenciacompleja hasta tanto seextinga el transitorio
-
La transformada de LAPLACE y Funciones de TransferenciaLas ecuaciones diferenciales definen la evolucin de unavariable a medida que otra varia. La variable independienteclsica es el TIEMPO.La ecuaciones diferenciales pueden ser resueltasanalticamente, o numricamente va integracin implcita oexplicita, o atravs de la trasformada de Laplace.La Transformada de Laplace permite convertir las ecuaciones
9Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
La Transformada de Laplace permite convertir las ecuacionesdiferenciales en algebraicas, siempre y cuando las ecuacionesen si sean lineales (o linealizadas en un punto de operacin),con coeficientes independientes del tiempo.Con Laplace se definen las Funciones de Transferencia y seestablecen relaciones muy pedaggicas con diagramas debloque.Para sistemas grandes la Laplace pierde su atractivo natural.
-
0Dada la funcion f(t), se define:Laplace(f)=F(S)= exp(-S t) f(t) dt
Transformada de Laplace
10Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0
S=frecuencia compleja=+ jS=j w (en regimen permane e
w
nt )
-
Ejemplo de la TL
decreciente en el tiempo
0
f1(t) exp( 5 t)F1(S) Laplace(f1) exp( S t) exp( 5 t) dt
1F1(S)S 5
=
= =
=
+
11Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
creciente en el tiempo
0
F1(S)Si f2(t) exp( 5 t)F2(S) Laplace(f2) exp( S
S
t) exp( 5 t) dt1
5
SF2( )
5S
=
= +
= =
+
=
+
-
decrece en el tiempo muy rapidamente
decrece en el tiempo muy lentamente
S 5
f1(t) exp( 5 t)1F1(S)
f2(t) exp( 0.5 t)
+
=
=
=
12Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
decrece en el tiempo muy lentament
Los terminos que decaen lentamente son "domin
e
antes"S 0.
f2(t) exp( 0.5 t)1F2(S)
5
=
+
=
-
f(t) (f(t)) = F(S)1 1/St 1/S2
tn n!/Sn+1
eat 1/ (S-a)Sen at a / (S2+a2)
13Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Sen at a / (S +aCos at S / (S2+a2)df/dt S F(S) f(o)
d2fdt2 S2F(S) S df/dt(o) f(o)
t
0
1Laplace [ f(x)dx]= F(S)S Laplace(dirac(t))=1
-
t0
Caso Capacitor con condiciones iniciales nulas1 1 1
vcap i(t)dt Vcap(S) I(S) Zcap(S)C SC SC
Caso Inductor con condiciones iniciales nulas
= = =
Casos de Inters Especial
14Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
divind L * Vind(S) S L I(S) Zind(S) S L
dt
Delta de Dirac o Impulso Unitariode Energia
= = =
(t)
d (t)Inversa _ Laplace(
Inversa _ Lapl
S) dt
ace(1) (t)
=
=
No construibles fisicamente,debiendose recurrir a bloquesde adelanto de fase .Ref. 1,pag 146
-
Teorema del Valor Inicial y Final en Laplace
t 0 S
Valor Iniciallim f (t) lim S F(S)
=
15Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
t S 0
Valor Finallim f (t) lim S F(S)
=
-
Sea un circuito RC alimentado por una simple fuente dc con la salida
11SCVout / Vin 1 1 RCSR
SC
:
= =
++
tomada sobre el capacitor
El Capacitor como Circuito Integrador
16Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
S 0 S 0t
SCVdc 1 1lim Vout lim S lim Vdc VdcS 1 RCS 1 RCS
= = =
+ +
Este resultado fundamental indica que el capacitor se cargara al valor delvoltaje de la batera, haciendo que el voltaje de salida sea igual al voltaje deentrada en Rgimen Permanente. Es decir, el capacitor como circuitointegrador asegura que no haya error en Rgimen Permanente. Este hecho seexplota en el uso de controladores frecuentemente.
-
Laplace en Matlab
Declarar las variables como Simblicas
Syms S tUsar las funciones
17Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
F(S)=laplace (f(t))f(t)=ilaplace(F(S))
subs(f(t))le da naturaleza numerica a f(t)
-
clear all
clc
close all
syms s tVin=1 %impulso dominio Laplace
Ejemplo numrico DefiniendoW=10 rad/seg Vin(s)= 1delta diracVin(s)=1/sescalonVin(s)=w/(s^2+w^2)sin(w t)
18Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
R=1
L=2
G=1/(R+s*L)%Corriente como salidaGt=ilaplace(G*Vin)%respuesta naturalt=0:0.01:5;Gt=subs(Gt); %para convertir a numricofigure(1),plot(t,Gt),grid
Se obtiene la respuesta al impulso, al escaln o a una excitacin senoidal
-
Funciones de Transferencia en Matlab
[ ]
1 0 0
la
la la
S tf([1 0 ],[1]) S (1 S 0 S ) / (1 S )G K / (S 2) ^ 3 , con K 1Polos( G ) pole( G ) 2; 2; 2
= = +
= + =
= =
= =
3
19Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ]lclc
Sea, con H 1 , K datoG G / (1 GH) K / (S 2) ^ 2 KLGRraicesLazoCerrado rlocus(G ) KcrecienteRespuestaEscalonUnitario figure(
= =
= + = + +
=
la1),step(G )
-
Ejemplo Numrico
S tf([10 ],[1])=
S ^ 2 3S 2GS ^ 2 2S 3
+ +=
+ +
20Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ][ ]
S ^ 2 2S 3P pole(G) 1 j 1.4142 ; 1 j 1.4142Z zero(G) 1 ; 2figure(1), RL rlocus(G)
+ +
= = +
= =
=
1 1
-
00.5
1
1.5Root Locus
I
m
a
g
i
n
a
r
y
A
x
i
s
x=poloo=cero
21Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
figure(1)
-
Races de los Polinomios Numerador y Denominador
RaicesDen roots([1 2 3])[ 1 j1.4142 ; 1 j1.4142]
RaicesNum roots([1 3 2])
= =
= + +
=
22Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
RaicesNum roots([1 3 2])[ 1; 2]
=
=
-
Descomposicin en Fracciones Parciales(no funciona si hay polos repetidos)
Residuos Polos Termino Directo
N polinomio del numeradorD polinomio del denominador[Res,Pol,Dir] residue(N,D)
N [1 3 2]
=
=
=
=
23Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
D [1 2 3]Res [0.5 j 0.7071 ; 0.5 j 0.7071]Pol [ 1 j 1.4142 ; 1 j 1.4142]Dir [1]N(S) Res(1)D(S) S
=
= +
= +
=
=
para aplicar ilaplaceRes(2) DirP(1) S P(2)+ +
-
Anlisis de un circuito RL como punto de partida para entender los retardos fsicos de primer orden
24Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-
V = i R + L = Vaplicado externamente= Vexc
L + i R V = 0
dtdi
i
t = 0
R
LVexcdt
di
25Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
RL + i - = 0
RV
Voltios / Ohms = AmpAmpAmp / Seg
= Seg (constante de tiempo)= L / R
dtdi
-
+ i - = 0
= [ K V i ]
Con K= 1 / R
Ecuacin Diferencial
1
RV
i
di/dt
26Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Con K= 1 / R
0
Aplicando Laplace con ( ) = S I(S) i(0)
RSV )(
RSV )(
S I(S) + I(S) =
I(S) [ 1 + S] =
i
-
I(S) = V(S)[1/R]
[1+ S]
Es decir:
V(S) I(S)(1/R)
1+ S
27Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1+ S
G(S) = Funcin de Transferencia
G(S) = [K]
1+ S
K = (1/R) = Ganancia
= = Cte de TiempoRL
-
G(S) = = =(1/R)/
S + S +
1/L1
R1 1
S + 1
En S = - (1/ ) G = en S = - (1/ ) esta ubicado unaprtiga que sube la superficie G, es decir all esta ubicado un poste
1
28Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
(pole)
Si V(S) = [caso Vdc aplicado en t=0]escalnVdcS
I(S) = RVdc
S1 1
1+ S
-
Determinar el valor de i(t) cuando t :
RVdci(t) = S I(S) = = = 11+ SS
S 11+ St S 0
1
0
RVdc
RVdc
29Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Cual ser el valor inicial de i(t) = i(0) = ?
i(t) = S I(S) = = = 0 t 0 S
1S
S1
1+ S1R
VdcR
Vdc
-
Para obtener la solucin se descompone en fracciones parciales
S1 1
1+ S= +
B1+ SS
A
30Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Multiplicando todo por S , con S 0:
SS
1
11+ 0 = A + = A 1
BS A = 1
-
Multiplicando todo por y haciendo S ( - 1/ )(1+ S)
S1
1
= + B = 0 + B
L
(1+ S)
(1+ S)
S
A (1+ S)
1
31Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
S1
S1
S1
= B = = - = -RL
1+S
( - 1/ )1
I(S) = = +1
1+ S-
RVdc
RVdc
-
S1
S1
RVdc
RVdc
RVdc
= -
1
(S + )1
= -
1
(S + )1
32Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
S RR (S + )1
Antitransformando:
i(t) = - eR
VdcR
Vdc t
-
= iperm + itransitoria
i(t) = [1 - e ] R
Vdc t
-
-
Si t 0 => i(t) 0
Si t => i(t)
Grficamente:
RVdc
-Vdc e t
33Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Grficamente:
RVdc
t
RVdc
RVdc
-
-
-
RVdc
RVdc e
e = itransitoria-
t
-
RVdc
iperm
i(t) = iperm + itransitoria
34Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
RVdc
-
itransitoria= inatural
El transitorio desaparece virtualmente en 5 constantes de tiempo.
-
Ntese que
1. Si la ganancia (=1/R) crece, es decir, si R disminuye, la iperm aumenta.2. Si la constante de tiempo crece = L/R (Seg), el transitorio es mas lento.3. Al aplicar el escaln de tensin (Vdc, en t = 0), la i(t) obedece la orden de
ir de su valor inicial, al valor final, paulatinamente, con una rapidez dictadapor su constante de tiempo . Es decir, en general, un cambio en la
35Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
por su constante de tiempo . Es decir, en general, un cambio en lavariable de entrada, causa un cambio en la variable de salida, pero sindiscontinuidades: Vin => iout
4. Este comportamiento de i(t) en este circuito, tpico de cualquier fenmenofsico, implica que i(t) tiene un retardo de primer orden con respecto alvoltaje aplicado externamente. Este hecho viene representado por:
-
a) = = [ - i ] Ec. Diferencial ; K=Ganancia =
b) I(S) = V(S) Diagrama de bloque:dtdi 1
R1
K(1+ S)Salida EntradaFuncin de
transferencia
G(S)V(S) I(S)
Vdc Vdc-
t
i.
K V
36Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
c) i(t) = - Evolucion en el tiempo, ante un escaln VdcR
VdcR
Vdc-
e t
5. La solucin se puede hallar sin recurrir a la transformada de Laplace, bienbuscando la ipermanente y la itransitoria, o bien integrandonumricamente (lo cual no tiene mucho sentido cuando como en este casola solucin es obvia).
Aplicando al caso mencionado i(t) = iperm(t) + itransitoriaIpermanente =Vdc / R
-
di/dt= 0 = ( 1/ ) [ V/R i] iperm = V/Ritransitoria se desprecia la excitacin externa y se busca la respuesta
natural del sistema di/dt = [ 0 i ]
1
i&
di / dt i /=
37Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0Ln(i) = ( - 1/ ) t i i0
t t0
Ln(i) Ln(i0) = ( -1 / ) (t t0)
di / i = - (1/ ) dt
di / dt i /=
-
Ln (i/i0) = ( -1/ ) t
i = i0 e = itransitoria
t-
i(t) = ipermanente + itransitoria
t-
= + ei0RVdc
38Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
R
Valor inicial de inatural
Para calcular inatural (0) = i0
Se recuerda que
i(0) = 0 = + i0 e0 = + i0 => i0 = -RVdc
RVdc
RVdc
-
RVdc
RVdc
RVdc
RVdc
iperm =
inatural = itransitoria = - e t
-
i(t) = - e t
-
39Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Aplicacin al caso de pequeas perturbaciones
1= [ - i ]R
V
V = VRP + V ; RP = Rgimen Permanente
i = iRP + i
i
-
1RP
+ = - ( iRP + i )RVV +
0
1
= + - iRP - iRV
RV
Se cancelan
i
i
40Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Se cancelan
Pero en el punto de partida : ipermnente = RV
1 = - iR
Vi = R
V
iNotar que la expresin enDelta tiene la misma formaque en las variablesoriginales
-
Caso Circuito RC serie con Salida sobre la Resistencia (Filtro Pasa Alto)
Zc=1/SCVc=Var. Estado
Para S= j W =Zcap=0Vout=Vin
Altas Frecuencias Pasan Inalteradas
41Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
R Vout= I R= RC dVc / dtVin
I=C dVc / dt
Vin=Vout + Vc Vout= Vin Vc Vout = ( 1 ) Vc + (1) Vin RC dVc / dt = Vin - Vc dVc / dt = - (1/RC) Vc + (1/RC) VinLaplace RC S Vc(S) = Vin(S) - Vc(S)
Pasan Inalteradas
-
Vc(S) ( RCS+1) = Vin(S)Vc(S)= Vin / (RCS + 1)Vout(S) = Vin Vc(S = Vin- ( Vin / (RCS + 1))Vout(S)= Vin [ RCS / (RCS+1) ] = Vin G(S)
42Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Si Vin (S)= Vdc / S Escaln de tensinVout( S)= (Vdc / S ) RCS / (RCS+1) = Vdc RC / (RCS+1) Vou t(S)= Vdc 1/ [ S + (1/RC) ]antitransformando:Vout (t)=Vresist = Vdc exp( - t /RC) se anula en rgimen permanente
-
Vout = VR
Vdc = Vexc
43Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
t
Circuito RC con Salida sobre R usando Vexc=Vdc
-
El Sistema de Orden Dos Normalizado (Clasico)Para entender cabalmente los resultados de una respuesta en el tiempoproveniente de una funcin de transferencia ante una excitacinexterna, es vital analizar en profundidad un sistema cuadrticonormalizado, que obedezca a una solucin oscilatoria elemental. Ref1,pag121. Ref. 2, pag 721.Es cierto que procesos prcticos estarn representados por sistemasde orden superior al dos, pero es tambin verdad que con frecuencia
44Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
de orden superior al dos, pero es tambin verdad que con frecuenciaaun cuando existan varios polos, tpicamente dos de ellos tienden a serlos problematicos (los que mas influencian la respuesta en el tiempo),razn por la cual un dominio profundo de la respuesta del sistemacuadrtico es invalorable, para sentar las bases del entendimiento desistemas de mayor dimensin.El movimiento mecnico de un pndulo, o un circuito RLC serie enelectricidad, son ejemplos clsicos fsicos de sistemas cuadrticos.Este ultimo caso ser objeto de atencin a continuacin.
-
Sea un circuito RLC convencional con Condiciones Iniciales Nulas
RPor divisor de tensiones
1/ sC VoutG(s) (1/ sC) sL R Vin= =+ +
45Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Vin
Vout
SL
1/SC
G(s) (1/ sC) sL R Vin1G(s)
LC s ^ 2 RCs 11/ LCG(s)
s ^ 2 R / L s 1/ LC
= =
+ +
=
+ +
=
+ +
-
Wn ^ 2G(s)s ^ 2 2 Wn s Wn ^ 2
Donde se definenWn Frecuencia natural de oscilacin(rad / seg) 1/ LC
R / 2Relacion de Amortiguacin(nepers) 0, si R 0L / C
=
+ +
= =
= = > >
46Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Las raices del denominador de G(s), es decir,los polos de G(s) :2 Wn (2 W
s1,2 = n ) ^ 2 4 Wn ^ 2 )2
s1,2 Wn Wn ^ 2 1
s1,2 Wn jWn 1 ^ 2; 0 1 Wd Wamort Wn 1 ^ 2)s1,2 Wn j 1 ^ 2 ; 0 1
1/ 2 0.7071 1 ^ 2 1/ 2 0.7071
=
= < < = =
= <
-
Varios comentarios son necesarios con respecto a los polos de G(s):
1) Ambos polos dependen casi enteramente de la Relacin de Amortiguacin (RAmort). La Wn apenas juega el papel de un factor de escalamiento
2) Si la RAmort es cero, ambos polos son imaginarios puros: s1,2= j Wn3) Si la RAmort es 1, ambos polos son reales e iguales: s1,2= -Wn
47Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
3) Si la RAmort es 1, ambos polos son reales e iguales: s1,2= -Wn4) Si la Ramort es mayor que 1, los polos son reales, negativos y
diferentes5) Si la Ramort esta en el rango (0,1), las raices son complejas
conjugadas,de valor: s1,2 Wn jWn 1 ^ 2 Modulo(S1,2) Wn ^ 2 1 ^ 2 Wn = = + =
-
6) Para el caso de los polos complejos conjugados, el Lugar geomtrico de dichos polos, es decir, su trayectoria, es un circulo de radio Wn y con un angulo de fase igual a
a tan( 1 ^ 2 / ) = - 0.0000 1.0000 90.0000- 0.1000 0.9950 95.7392-0.2000 0.9798 101.5370
- 0.3000 0.9539 107.4576
1 ^ 2 ( )
Im
48Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
- 0.3000 0.9539 107.4576 -0.4000 0.9165 113.5782
- 0.5000 0.8660 120.0000-0.6000 0.8000 126.8699-0.7000 0.7141 134.4270-0.7071 0.7071 135.0000-0.8000 0.6000 143.1301 -0.9000 0.4359 154.1581-1.0000 0.0000 180.0000
Im
Re
j Wn
Wn Wn
Wd Wn 1 ^ 2=
Wn
Wn
S
sin( ) 1 ^ 2 =
-
8Root Locus
0.4
0.6
0.8
1
1.2
1.4
1.6Wn=3 Rad/seg ReLAmort=0.2
V
o
l
t
a
j
e
e
n
e
l
C
a
p
a
c
i
t
o
r
(
V
)
Wn=3 Rad/segReLAmort=0.2Wd=3*sqrt(1-0.2^2)=2.9394Tpico=pi / Wd=1.0688
SP
49Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0-8
-6
-4
-2
0
2
4
6
Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
0 1 2 3 4 5 6 7 8 9 100
0.2
Tiempo (s) (sec)
Respuesta al Escalon Unitario
Polos
-0.6000 + 2.9394i-0.6000 - 2.9394i
Tpico
Caso Subamortiguado
SP=Sobrepaso=Overshoot
-
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Wn=3 Rad/seg ReLAmort=0
Tiempo (s) (sec)
V
o
l
t
a
j
e
e
n
e
l
C
a
p
a
c
i
t
o
r
(
V
)
Respuesta al Escalon Unitario
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Wn=3 Rad/seg ReLAmort=1
Tiempo (s) (sec)
V
o
l
t
a
j
e
e
n
e
l
C
a
p
a
c
i
t
o
r
(
V
)
Respuesta al Escalon Unitario
Wn=3RAm=0Polos: 3i ; -3i
Wn=3RAm=1
Polos:-3; -3
Caso oscilatorio Puro
50Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Wn=3 Rad/seg ReLAmort=3
Tiempo (s) (sec)
V
o
l
t
a
j
e
e
n
e
l
C
a
p
a
c
i
t
o
r
(
V
)
Respuesta al Escalon Unitario
Wn=3 RAm=3Polos:-17.4853 ; -0.5147
Caso Crticamente Amortiguado
Caso Sobreamortiguado
Caso oscilatorio Puro
Obviamente la mejor respuesta es la crticamente amortiguada, por ser la mas rpida y no ser oscilatoria. No siempre es posible alcanzarla
-
Significado de las Oscilaciones del Sistema Clsico de Orden DosEn el caso subamortiguado y no amortiguado hay oscilaciones de una frecuenciallamada frecuencia natural del sistema, como justamente se ha discutido.Si se tratara de un pendulo, tales oscilaciones representaran la conversinperidica de energa cintica en potencial y viceversa. La amortiguacin secorresponde con la friccin con el medio ambiente.En el caso de un circuito elctrico RLC, las oscilaciones se asocian a laconversin de energa elctrica almacenada en el capacitor en energa magntica
51Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
conversin de energa elctrica almacenada en el capacitor en energa magnticaalmacenada en el inductor, proceso de naturaleza intrnsecamente peridica. Laresistencia elctrica va calentamiento representa la amortiguacin.Este proceso de intercambio de energa en el circuito RLC, puede presentarseaun en ausencia de excitacin externa, si es que, por ejemplo, cuando se cierrael circuito en el capacitor hay carga almacenada, que busca su drenaje hacia elinductor, elemento que comienza a acumular la energia hasta que la corrientealcance su valor de regimen permanente, para luego revertir el proceso. Si nohay resistencia la conversin de energa se llevara a cabo indefinidamente(oscilador elctrico)
-
Cifras de Merito del Sistema de Orden Dos Normalizado (Ref.1, Pag 123)
Para inferir la bondad de la solucin del sistema de orden dos estandarizado, sehace necesario buscar la expresion en el tiempo para el caso subamortiguado,ante una excitacin tipo escaln unitario, por ejemplo.
Y(s) Wn ^ 2 Wn ^ 2G(s)U(s) s ^ 2 2 Wn s Wn ^ 2 (s Wn jWd)(s Wn jWd) = = =+ + + + +
52Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
U(s) s ^ 2 2 Wn s Wn ^ 2 (s Wn jWd)(s Wn jWd)A B CY(s) Fracciones Parcialess (s Wn jWd) (s Wn jWd)
A 1Wn ^ 2 Wd j WnB
2( Wd ^ 2 jWnWd) 2 WdWd j WnC Conjugado(B)
2 Wd
+ + + + +
= + + + + +
=
+= =
= =
G tiene exactamente lamisma estructura de laecuacin de oscilacin delrotor de la maquinasincrnica, identificando Irlccon Wrotor y Vc conDelta_rotor
-
Aplicando la transformada inversa de Laplace:
[ ]
Y(t) y1(t) y2(t) y3(t)y1(t) 1y2(t) B exp ( Wn jWd) t
Wd j Wnexp( Wn t) exp(jWd t)
2 Wd
= + +
=
= +
+=
53Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ][ ]
[ ]
2 Wd1
exp( Wn t) ( Wd t j Wn) t cos(Wd t) jsen(Wd t)2 Wd
Similarmente :y3(t) C exp ( Wn jWd) t
Wd j Wnexp( Wn t) exp( j
2 Wd
= + +
=
=
[ ][ ]
Wd t)
1exp( Wn t) ( Wd j Wn) t cos(Wd t) jsen(Wd t)
2 Wd =
-
Al sumar los tres trminos se obtiene la respuesta al escaln unitario.Ntese que los trminos individuales contienen partes reales y partesen cuadratura. Como la respuesta debe ser una expresin senoidal,los factores complejos deben obligatoriamente combinarse paraproducir una respuesta sin partes en cuadratura, es decir, totalmentereal. Efectivamente:
Y(t) y1(t) y2(t) y3(t)= + +
54Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ]
[ ]
11 exp( Wn t) 2 Wd cos(Wd t) 2 Wn sen(Wd t)2 Wd
1 Wd cos(Wd t) Wn sen(Wd t)1 exp( Wn t)Wn1 ^ 2
Pero del lugar geometrico de las raices,al ser Wn el radio del circulo :Wd / Wn sen( ) y (
= +
+ =
= Wn) / Wn cos( )
Luego :
=
-
[ ]
[ ]
exp( Wn t)Y(t) 1 sen( ) cos(Wd t) cos( ) sin(Wd t)1 ^ 2
exp( Wn t) WdY(t) 1 sin(Wd t ) a tan 90Wn1 ^ 2
= +
= + =
55Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Hallada esta expresin fundamental se pueden conseguir cifrasde mrito tales como el tiempo para alcanzar el primer pico, elporcentaje de sobrepaso, el tiempo de asentamiento, etc.
-
Cifra de Merito 1 Periodo de Oscilacin
Tratndose de una expresin senoidal, el tiempo de Periodo, ser
Woscilacion Wd Wn 1 ^ 2 2 pi f1 2 pi 2 piTf Wd Wn 1 ^ 2
= = =
= = =
56Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
f Wd Wn 1 ^ 2
Si Wn 3 Rad / seg0.20 T 2.1376 seg1/ 2 T 2.9619 seg
=
= =
= =
-
Cifra de Merito 2 Tiempo para llegar al PicoPara hallar Tpico, se busca el tiempo para el cual la funcin desalida alcanza su primer mximo, donde la primera derivada sercero
[ ]exp( Wn t)Y(t) 1 sin(Wd t ) Y( ) 11 ^ 2
dY(t) exp( Wn t)
= + =
57Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ]dY(t) exp( Wn t)Yprima(t) Wn sin(Wd t ) Wd cos(Wd t ) 0dt 1 ^ 2ConWn 3
0.2a tan(Wd / ( Wn)) 1.3694 rad
t0 1 valor inicial, para usar FZERO de Matlab :Tpico
= = + + =
=
=
= =
= =
= fzero(@ t Yprima(t), t0) Tpico 1.0688 seg =
-
Es posible obtener una expresion analitica para el Tpico, al igualar acero la primera derivada de la salida. En efecto:
[ ]dY(t) exp( Wn t)Yprima(t) Wn sin(Wd t ) Wd cos(Wd t ) 0dt 1 ^ 21 ^ 2sin(Wd t ) Wdtan(Wd t )
cos(Wd t ) Wn
= = + + =
+= + = =
+
58Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
piComo la pendiente es una funcion que se repite cada radianes, los maximos y minimos
, 3 .......Luego,el primer max imo se presentara cuando Wd t 1 :
Tpico 0.2 y Wn 3 Tpico 1.0688segWd Wn 1 ^ 2
pi pi pi pi
pi
pi pi
=
= = = = =
de esta funcion ocurriran cuando Wd t = 0 , 1 , 2
-
Cifra de Merito 3 Porcentaje de Sobrepaso (Overshoot)
Dado que el tiempo para alcanzar el primer pico ya se hadeterminado, es posible calcular cuanto vale la salida en ese puntoprecisamente y sabiendo que en regimen permanenente (t=inf) lasalida se hace igual a 1, se tiene:
59Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
PO porcentaje de overshootY(Tpico) Y( )PO 100 100 exp 20% max .
Y( ) 1 ^ 2 pi
=
= =
El PO se puede graficar en funcin de la relacin de amortiguacin
-
50
60
70
80
90
100PO en % versus Relacion de Amortiguacion
60Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0 0.2 0.4 0.6 0.8 10
10
20
30
40
4%
1/ 2 0.7071=
-
Procedimiento Practico para definir un punto S del LGR:
-Ingresar como dato el SP en %- Calcular con fzero de matlab la relacion de amortiguacion- con , calcular
-Hallar =asin( )1 ^ 21 ^ 2
o = = =
61Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-Hallar =asin( )-Hallar
-Ingresar Sreal como DATO DE INTERES-Calcular Simag=Sreal*Tan(Gamma)-Asi se logra tener S complejo Sinteres=Sreal + j Simag-Sinteres es el punto por donde interesa que pase el LGR
1 ^ 2 oSi 4% pi / 4 45 = = =
-
Funciones de Transferencia en
62Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Lazo Abierto y Lazo Cerrado
-
Funcin de Transferencia
En el dominio de las frecuencias en general, una funcin de transferencia es deltipo
)...)()(()...)((
321
21
pSpSpSZSZSG
+++
++=
Si S + Zi =0 => S = - Zi =>la funcin se va a cero => Zi se conoce como un cero.
63Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Si para algn factor del denominador (S+pi) = 0 => S = - pi => G se hace infinitaen ese punto . Si se piensa en G como una superficie en el plano complejo, en S= -pi , all la carpa crece indefinidamente, como si estuviese siendo levantadapor una prtiga o poste (pole en ingles). Por eso pi es conocido como el pole i(polo i, en espaol).Las funciones de transferencias de planta, eventualmente deben sufrir unarealimentacin para hacer (por ejemplo) que un error tienda a cero (casoregulacin)
-
La presencia de un ZERO en una ubicacin en el plano complejo determinaque en dicha ubicacion la salida se ir a cero independientemente del valor dela entrada. Ese es el caso de circuito RC con salida tomada sobre la R para unaVexc=Vdc, como ya se vio. En ese caso el ZERO esta en el origen.La presencia de un POLO en una ubicacin dada es mucho mas peligrosa, puesindica que en esa posicin la salida se ira a infinito aun con una entrada finita.Esto es sinnimo de desestabilizacin.En general los ZEROS son menos peligrosos que los POLOS por su impacto
64Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
En general los ZEROS son menos peligrosos que los POLOS por su impactosobre las respuesta del sistema.Como se ira develando, los ZEROS al igual que las posibles CondicionesIniciales (voltajes en capacitores y corrientes en bobinas) que puedan existir,tienden a contribuir con la magnitud y forma de la respuesta. Los POLOS por suparte tienden a definir el PATRON de la respuesta. El patrn es indicativo de lanaturaleza de la respuesta (acotada, creciente indefinidamente, etc)
-
Movimiento Relativo de los Zeros hacia los PolosSi se asume que el plano complejo es un valle como el de Caracas comolomas y valles, el til pensar que en las lomas estn los POLOS y que enlos valles estn los ZEROS. Luego una pelota de golf tendera en generala deslizarse de las lomas a los valles de manera natural.De no haber Zeros (valles) cercanos se asumen que estn infinitamentelejos de los Polos (lomas).
65Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
lejos de los Polos (lomas).A medida que en una funcin de transferencia de lazo cerrado secomienza a aumentar la ganancia tratando de disminuir el Error deRgimen Permanente, los polos comienzan su viaje hacia los zerosdescribiendo una trayectoria denominada lugar geomtrico de las races,que puede conducir a la inestabilidad del sistema, si una parte real de unaraz se pasa al semiplano positivo.Aqu una compensacin externa en forma de un compensador PID puedeser de gran utilidad
-
Funciones de transferencia de Lazo Abierto y de Lazo Cerrado
LUGAR GEOMETRICO (Root Locus) DE LAS RAICESEn general para un componente tal como una excitatriz, una vlvula, una turbinaelemental o el campo rotrico de una mquina sincrnica, existir una funcin detransferencia de orden 1, como se vio en el caso del circuito RL.
KSG )( =
66Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
SSG
1)(
+=
K = Gain (Ganancia) = Constante de TiempoPolo se ubica en 1+ S = 0 => S = - 1
Si la entrada es un escaln unitario: 1t
-
Sal(S) = => sal(tiempo) = S. Sal(S) = K 1s
K+1S
1t S 0
=> Gran error en rgimen permanente!
U(S) G Y(S) lazo abierto
67Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Realimentando negativamente:
U G Y lazo cerrado
H
+
-
-
[U(S) H Y(S)] G = Y(S)
G U(S) = [GH + 1] Y(S)
Y(S) = U(S)G
68Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Y(S) = U(S)GH
G+1
U(S) Y(S)GHG
+1
Funcin de transferencia de lazo cerrado
-
sK+1
Sea G = ; H = 1
Glazo cerrado = =
111
+
+K
s
K sK
K++ 1
K grande puede serun factor de riesgodependiendo del
69Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
11
1 +
+s
K
Luego la respuesta a un escaln unitario ser:
sKK
++ 1S1
Sal(S) =
Sal(t) = S. Salida(S) = t S 0 1+K
KError en RegimenPermanente tiendea disminuir con laGananacia K
dependiendo delorden del sistema
-
Influencia Relativa de Polos y Ceros de una Funcin de Transferencia
Sea la FT arbitraria, descompuesta en fracciones parciales,con un zero en s c,un polo en s 1 y un polo en s 2.
Y(s) s c K1 K2G(s)U(s) (s 1)(s 2) s 1 s 2
Utilizando un escalon unitario como entrada U(s) 1/ s
=
= =
+= = = +
+ + + +
=
70Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1) Con (s c) (s 3) Y(s)+ = +
K1 K2 K3 2 0.5 1.5s 1 s 2 s s 1 s 2 sK1 K2 K3 1 1 02) Con (s c) (s 0) Y(s)
s 1 s 2 s s 1 s 2 sK1 K2 K3 3 1.5 1.53) Con (s c) (0 3) Y(s)
s 1 s 2 s s 1 s 2 sK1 K2 K3 4 2.5 1.54) Con (s c) (s 3) Y(s)
s 1 s 2 s s 1 s 2 s
= + + = + ++ + + +
+ = + = + + = + ++ + + +
+ = + = + + = + ++ + + +
+ = = + + = + ++ + + +
-
La gran conclusin de este sencillsimo ejemplo es que la existencia y ubicacin delZero en la FT nunca cambia los factores del denominador en la respuesta,limitndose su efecto a modificar las constantes de las fracciones parcialesinvolucradas. Es decir, la presencia de los ceros en una funcin de transferencia sereduce a cambiar la forma de la respuesta, pero jams su naturaleza. En otraspalabras, si la respuesta es acotada (estable) en ausencia de ceros, tambin loser si se introducen ceros.Por esta razn fundamental, la atencin primaria en una funcin de transferenciaen los referente a su estabilidad, debe colocarse en el polinomio del denominador,
71Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
en los referente a su estabilidad, debe colocarse en el polinomio del denominador,pues son los polos o races del denominador los cuales prevalecen en la forma dela respuesta del sistema. De hecho el denominador de la FT se conoce como supolinomio caracterstico.En sistemas de Lazo Cerrado que son los de verdadero inters en la practica, sertambin el polinomio caracterstico de la Glazo_cerrado el cual hay que analizar enprofundidad para inferir la estabilidad del sistema. Una misin tpica de introducirceros en una FT es acelerar la respuesta transitoria, mediante los llamadoscompensadores Proporcionales- Derivativos (PD).Ver ilustraciones de la siguiente pagina
-
00.5
1
1.5Salida unit step(s) para G(s)= (s+3) / [ (s+1)*(s+2) ]
A
m
p
l
i
t
u
d
e
0
0.05
0.1
0.15
0.2
0.25Salida unit step(s) para G(s)= (s+0) / [ (s+1)*(s+2) ]
A
m
p
l
i
t
u
d
e
Y(S)=(s+3)/[(S+1)*(s+2)] Y(S)=(s)/[(S+1)*(s+2)]
Y(t)Y(t)
72Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0 1 2 3 4 5 60
Time (sec)0 1 2 3 4 5 6
0
Time (sec)
0 1 2 3 4 5 60
0.5
1
1.5Salida unit step(s) para G(s)= (0+3) / [ (s+1)*(s+2) ]
Time (sec)
A
m
p
l
i
t
u
d
e
0 1 2 3 4 5 6-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2Salida unit step(s) para G(s)= (s-3) / [ (s+1)*(s+2) ]
Time (sec)
A
m
p
l
i
t
u
d
e
Y(S)=(3)/[(S+1)*(s+2)] Y(S)=(s-3)/[(S+1)*(s+2)]
Y(t) Y(t)
-
Polos en Sistemas de Orden Dos:
Sea G = K / (s + a)2 = Glazo abierto K>0
73Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Glc = = = Glazo cerrado)(1
)(
as
Kas
K
++
+
KasK
++ )(
-
Polos de Glc
(S+a) = -K = - 1 x K = K ejpi = K [Cos(pi) + j Sen (pi)]
(S+a) = K e ; n = 0 , 1 )2( pipi nJ +
(S+a) = eK ( )22 pipi nJ +
74Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
(S+a) = eK
S = - a + eK( )
22 pipi nJ +
Sea a =2 ; K>0
S1 = - 2 + e = - 2 + j ( n = 0) K K
23pi
J
2pi
J
S2 = - 2 + e = - 2 j ( n = 1) K K
2
-
Imag
Real
S1
S2
-2
Sistema Oscilatorio Amortiguado con trminos del tipo
etKj
et 2 +
-
75Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Polos en Sistemas de Orden Tres:
H = 1 K>0Glc = K / (s + a)3
Con realimentacin negativa:
Glc = K / [ (s + a)3 + K ] K grande => pequeo erroren rgimen permanente!
-
Polos de Glc (3 races)
(S+a) = -K = K e
S+a = e
Sea a = - 2 y K>0
)2( pipi nj + (n=0,1,2)
32 pipi n
J+
3 K
76Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
S1 = - 2 + e = - 2 + [ Cos ( pi/3) + j Sen (pi/3) ] 3pi
J3 K 3 K
S2 = - 2 + e = - 2 + [ ( Cos (pi) + j Sen (pi) ]piJ3 K 3 K
S3 = - 2 + e = - 2 + [ Cos (5 pi/3) + j Sen (5 pi/3) ]35pi
J3 K 3 K
-
Notar que a medida de que K crece la parte real de S1 y S3 se harnpositivos representando inestabilidad para K grande
S1
77Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
pipi / 3
- pi / 3-2
S2
S3
=> Inestabilidad para K grande (necesita ser reducido a orden dos,
insertando un controlador PID)
-
Con Matlab para el caso de orden tres el lugar geomtrico de las races luce asi:s=tf([1 0 ],[1]), G=1/ [(s+2)^3] , rlocus(G)
1
1.5
2Root Locus
P=pole(G)Z=zero(G)
rlocustrabaja con
78Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
Real Axis
I
m
a
g
i
n
a
r
y
A
x
i
s
trabaja con Glazo
abierto
-
LUGAR GEOMETRICO DE LAS RAICESGH=-1
Matlab---- Dorsey pag 142, 145, 147
a
-
ADELANTAR FASEDERIVARACELERAR
RETARDAR FASEINTEGRARDESACELERAR
80Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
IMPACTO DEL PID
-
CIRCUITO RC IMPACTO DE CONDICIONES INICIALES
81Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
IMPACTO DE CONDICIONES INICIALESCIRCUITO RLC
ANALOGIA CON LA MAQUINA SINCRONICA
-
CIRCUITO RC CON CONDICIONES INICIALES NO NULASAnalticamente para el caso RC serie se tiene:
Transformando la anterior expresin al dominio de Laplace:
inC
C
inRC
vdt
dvCRv
vvv
=+
=+
)()0()()()())0()(()( inCCCinCCC sVvCRsVsCRsVsVvsVssCRsV =+=+
82Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
En caso de asumir la tensin sobre la resistencia como salida:
)0(11
)()(
)0()()1()(
Cin
C
CinC
inCCCinCCC
vsCR
CRsCR
sVsV
vCRsVsCRsV
+
++
=
+=+
)0(1
1)(1
)()0(1
)(1
)(
)0(11
)()()()()()(
CinRCinR
Cin
inRCinR
vsCR
sVsCR
ssVv
sCRCR
sVsCR
sCRsV
vsCR
CRsCR
sVsVsVsVsVsV
+
+=
+
+
=
+
+==
-
Para hallar las soluciones posibles en el dominio del tiempo, hay queexplorar varias opciones, que involucren los valores de:
Impacto de :1. El voltaje de pre-energizacin en el capacitor no puede sufrir discontinuidades fsicamente. Su valor puede ser cero, cero positivo o cero negativo, arbitrariamente.2. Como no hay inductancia en el circuito, la corriente serie puede sufrir
)0(y )()( Cinexc vsVsV =)0(Cv
)0()0()0( CCC vvv == +
83Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
discontinuidades, porque no existe la limitante de la ley de Faraday para elestablecimiento paulatino de un campo magntico.3. En cualquier caso el impacto de es efmero, pues su contribucin a lasolucin total es de la forma .
no puede bajo ningn concepto contribuir a desestabilizar la salida.Impacto de :La solucin forzada en rgimen permanente obedece a la excitacin
externa. escaln de tensin.
)0(CvCRt
C evtv cvout
=/)0()()0(
)0(Cv)()( sVsV inexc =
sVdcsVsV inexc /)()( ==
-
Anti transformando:
Retomando lo anterior: solo cambia la magnitud de la respuesta.
)0(1
11
)0(1
11
)( CCR vsCRsCR
Vdcv
sCRsVdc
sCRs
sV +
+=
+
+=
CRtC
CRtC
CRtRout evVdceveVdctvtv
+=+== /// ))0(()0()()(
)0(v
84Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Retomando lo anterior: solo cambia la magnitud de la respuesta.
Despreciando la excitacin:
)0(CvCIRCUITO RC (VOLTAJE CAPACITOR)
)0(11
)()( CinC vsCR
CRsCR
sVsV
+
++
=
CRtCCCC evtvv
sCRCR
sV =+
=/)0()()0(
1)(
-
Aplicando un escaln de tensin:
Anti transformando:
Notar que independientemente de la Vdc de excitacin, el voltaje del
sCRv
sCRVdc
s
VdcsV
vsCR
CRsCR
CRVdcs
Vdcv
sCRCR
s
VdcsCR
sV
CC
CCC
++
+=
+
++
=
+
++
=
/1)0(
/1)(
)0(11
)0(11
1)(
CRtC
CRtC
CRtRout evVdcVdceveVdcVdctvtv
=+== /// ))0(()0()()(
85Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Notar que independientemente de la Vdc de excitacin, el voltaje delcapacitor mantiene su continuidad para t=0.
A su vez, desapareciendo el transitorio RC, la tensin en el capacitor ser elde la excitacin forzada externamente.
-
LA RESPUESTA NATURALConsiderando condiciones iniciales nulas y aplicando como un
impulso unitario (unit impulse), se obtiene la respuesta natural.El impulso unitario (Dirac delta) constituye un efecto ficticio que simula una
inyeccin infinita de potencia al sistema durante un tiempo tan pequeo comose pueda.
0)0( =cv )(sVexc
=
=
0, 00, 1
)(t
tt
86Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Al aplicar la transformada de Laplace se cumple que:Luego, la respuesta natural no obedece a la Vexcitacin convencional
(Vdc,Vac) ni a las condiciones iniciales que puedan existir. Lo importante de larespuesta natural es que dicta el comportamiento en el tiempo del sistema anteuna inyeccin instantnea de energa, lo cual permite inferir las posiblescondiciones de estabilidad/inestabilidad que pueda tener un sistema.
11)( =
== tt
ttEnerga
[ ] 1)( =tL
-
Es decir, si la respuesta natural contiene factores de inestabilidad, no habrnecesidad de analizar la respuesta ante una excitacin dada, pues ya se sabrsu tendencia.
87Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
-
EL CASO RLCEl caso RLC es por definicin un caso de
segundo orden, de naturaleza oscilatoria.De hecho en ausencia de excitacinexterna y sin resistencia ohmica, constituyeel clsico oscilador LC, donde el capacitorinicialmente cargado se descargatransfiriendo su energa al inductor demanera peridica y sin fin.
88Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
manera peridica y sin fin.Conociendo ya que las condiciones
iniciales solo contribuyen a cambiar lamagnitud de la respuesta, pero no su patrnintrnseco, se procede a analizar el circuitoRLC considerando condiciones inicialesnulas y representando los elementosalmacenadores de energa mediante susimpedancias generalizadas.
-
Se partir de condiciones iniciales nulas:Se recuerda la expresin para el voltaje de un capacitor:
Desarrollando las expresiones de voltaje en el circuito:in R L Cv (t) v (t) v (t) v (t)
di(t)= + +
dttdvCtidtti
Ctv outout
)()()(1)( ==
0)0( =cv
89Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Se pueden escribir entonces las siguientes ecuaciones diferenciales,renombrando adems las variables:
in C
2C C
in C C C C2
di(t)v (t) R i(t) L v (t)
dtdv (t) d v (t)
v (t) R C L C v (t) R C v L.C v vdt dt
= + +
= + + = + +& &&
CCCC vxvxxvxvx &&&&&& ===== 22211
1 2
in 2 2 1
x x
v R C x L.C.x x=
= + +
&
& invCLx
RLx
CLx
xx
+
=
=
1/11
212
21
&
&
-
Matricialmente, lo anterior se escribe como:
Esta formulacin tiene la estructura natural del espacio de estados:
[ ] [ ] inCout
in
vx
xxvv
v
CLxx
RLCLxx
+
===
+
=
001
10
/11
10
2
11
2
1
2
1
&
&
90Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Esta formulacin tiene la estructura natural del espacio de estados:
Dondex= Variables de estadou=Variables de control/entradasy=Funciones de salida
La matriz A es de gran importancia, esta posee la informacin gentica delsistema, contenida en los autovalores.
uDxCyuBxAx+=
+=&
-
[ ] [ ] inLoutCLout vx
xCRvvxCLvCL
dtdiLvv +
====== 11
2
12&&&
Si la salida se tomara sobre la resistencia:
Si la salida se tomase sobre la inductancia:
Por funciones de transferencia, utilizando la frecuencia compleja:
[ ] [ ]1out R C 2 out R in2
xv v R i R C v R.C.x v v 0 R C 0 v
x
= = = = = = +
&
91Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Por funciones de transferencia, utilizando la frecuencia compleja:
Cout C in in
R L C
out
2in
1V (s) s CV (s) V (s) V (s) V (s)1V (s) V (s) V (s) R s L
s C1
V (s) [1/ (L*C)]L CG(s) R 1V (s) [1 R /L 1/ (L*C)]s sL L C
= = = + + + +
= =
+ +
-
Considere como ejemplo que R=1, L=2 y C=3.Escriba en MATLAB:R=1; L=2; C=3;s=tf([1 0],[1]);%Caso Vc como salidaa=[0 1 ; -1/(L*C) -R/L] , b=[0 ; 1/(L*C)] , c=[1 0] , d=[ 0 ]Lambda=eig(a) % Autovalores de A
92Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Lambda=eig(a) % Autovalores de AG=(1/(L*C)) / (s^2+(R/L)*s+(1/(L*C)))[N,D]=ss2tf(a, b, c, d)P=pole(G)Compruebe que los autovalores de la matriz A se corresponden con los
polos de la funcin de transferencia G.
[A,B,C,D] = tf2ss(N,D)
P=[-0.25 + j 0.3227 ; -0.25 - j 0.3227; ]
-
Supngase condiciones iniciales nulas y que f=60Hz.1. Hallar las matrices del espacio de estado (A,B,C,D) para el caso de que la
tensin de entrada sea:a) Continua Vdc=12.b) Alterna V=12*cos(2*pi*f*t).
2. Hallar la solucin en el tiempo para la funcin de salida, tomada sobre la R,sobre la L y sobre la C. Con R=0.5, L=2 y C=3.
TAREA PROPUESTA
93Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
sobre la L y sobre la C. Con R=0.5, L=2 y C=3.3. Utilizar colateralmente integracin implcita para resolver el problema.
-
CONTROLADOR PID (BLOQUES EN ADELANTO/ATRASO)Considere la siguiente relacin de transformacin:
Efecto controlador derivativo/integrativoSupngase el siguiente diagrama de bloques, en el que se coloca un PID en
cascada con la anterior planta:
ooscilatoriSistema 0101
)()(
22 =+=
++=
asasssUsY
94Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Donde , y cada trmino de la expresin representa una rama independiente. s
KisKdKpsGC ++=)(
-
Efecto controlador derivativo/integrativoSe determina la relacin de transformacin del diagrama de bloques
completo:
1. Sea Ki=0 no hay control integrativo.s
KisKdKpass
KisKdKp
s
KisKdKp
as
s
KisKdKp
as
sGsGsGsG
sGLAC
LACLC
++++
++=
++
++
++
+=
+
=
22
2
)(11
)(1
)()(1)()()(
95Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1. Sea Ki=0 no hay control integrativo.
Hay error en rgimen permanente
2. Sea Kd=0 no hay control derivativo.
aKpsKdssKdKp
sGLC ++++
= 2)(
s
KiKpass
KiKpsGLC
+++
+=
2)(
Este termino asegura amortiguacion
Kp y Kd se combinan para producir amortiguacion con menos error en Regimen
Permanente
-
En este ltimo caso en el que no se ejerce control derivativo, ante unescaln unitario se puede observar que la salida ser:
1limlim)(
)(lim1)(lim)(
302
0
00
==
+++
+=
+++
+=
==
KiKi
KisKpsasKiKps
KiKpass
KiKpty
sGs
sGsty
ss
LCsLCs
96Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Como se puede apreciar, existe cero error en rgimen permanente porefecto del control integrativo.
2 ++++++ KiKisKpsass
Kpas
-
1. La rama proporcional contribuye a disminuir el error de rgimenpermanente, pero no lo logra bien y hace lenta la respuesta.
2. La rama derivativa acelera y proporciona amortiguamiento (mata lasoscilaciones).
3. La rama integrativa elimina el error en rgimen permanente.4. Un derivador puro no existe; se dispone es de un adelantador de fase:
assG +=)( b est lejos componente muere rpido a b<
97Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
5. Un integrador puro no existe; se dispone es de un bloque atrasador de fase:
6. Como los ceros no cambian la naturaleza de la respuesta, sino los polos,resulta que el bloque PD y el bloque PI no interfieren entre si porque el PDtiene el polo muy a la izquierda y el PI muy cerca del origen.
bsas
sGPDC +
+=)( b est lejos componente muere rpido a b<
dscs
sGPIC +
+=)( dc >
-
Si la salida fuese la corriente I(s) en el circuito RLC con realimentacinnegativa, se obtiene:
sR
s
sLsVsI
sGsVs
Rs
sLsI
inLAin
++
==++
= 1)/1(
)()()()(1
)/1()(22
CIRCUITO RLC CON LA CORRIENTE COMO SALIDA Y R NEGATIVA
98Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
CLs
LR
ssVCL
sLR
s in
++
++1)(1 22
-
)(sI
99Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
La funcin de transferencia ser la siguiente:
sLK
CLs
LR
s
sLK
CLs
LR
s
KsLCL
sLR
s
KsL
sGKsGK
sGLA
LALC
+
++
=
++
+
++
=
+
= 11
)/1(1
1)/1(
)(1)()(
2
2
2
-
Claramente para una K conveniente positiva mayor que |R| se estabiliza elcircuito, partiendo de una R negativa hipottica.
Para fijar el polo deseado se recuerda el caso bsico de segundo orden, enel cual se obtienen las siguientes races de la ecuacin caracterstica:
Dado que:
)1( 22,1 = js n
=
1
100Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Dado que:
Supngase un caso en el que: Y en el que se fija a conveniencia que:
Entonces:
CLn =
1
sradn / 0711.7=5.0=
1237.61
5355.32
==
==
n
n
b
a
-
En ese caso, para calcular K, se obliga a que el denominador de seacero en el polo deseado :
Sea
Por lo tanto
)(sGLC1237.65355.32,1 js =
1)(0)(1 2,12,1 ==+ sGKsGK LALA
pi
==
=
3945.1)()( 2,12,1 sGsGKK
LALA
7171.011)( === KsGK
101Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Por lo tanto
Entonces0
7171.0)(1)( 2,12,1
====+
===
pipipipisG
KsGKLA
LA
7171.00 == KK
RLCguillermo.mRunPSSRLC2.mPSSRLC2..m
-
RELACION CON LA ECUACIN DE OSCILACIN DE LA MAQUINA SINCRONICA
Se recuerda la conocida ecuacin de oscilacin de la mquina sincrnica:
Si es pequeo, como generalmente es el caso, se tiene que sen . Porlo tanto se puede aproximar la anterior ecuacin a:
0Km (Pm Ke sen Ka ); Km2 H
= =
=
&
&
=& )( KaKePmKm ))()(()( sKasKePmKmss =
102Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Al aplicar la transformada de Laplace se obtiene entonces la siguientefuncin de transferencia:
=
=
&
& )( KaKePmKm)()(
))()(()(sss
sKasKePmKmss
=
=
PmKeKmsKaKms
Kms
PmKmsKeKmsKaKmsssKasKePmKmss
++=
=++=
2
22
)(
)()())()(()(
Sinnimo de Vcap. en el caso RLC
-
En el caso de la velocidad angular:Pm
KeKmsKaKmssKm
sss ++
== 2)()( Sinonimo de la corriente en elcaso RLC
Las similitudes entre el circuito RLC y la maquina sincrnica
103Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
son obvias:
iVinPm
CKeHLLKm
RaKa
O
=
=
=
==
=
/1/2/1
-
AUTOVALORESAUTOVECTORESDIAGONALIZACION DE MATRICESAPLICACION A ECUACIONES DIFERENCIALESFACTORES DE PARTICIPACION
104Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
FACTORES DE PARTICIPACION
-
Ecuacion diferencial
xx0
dx / dt k xdx / x kdtLn(x) | k(t t0); t0 0 x0Ln(x) Ln(x0) k tLn(x / x0) k tx / x0 exp(k t)
=
=
= =
=
=
=
105Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
x / x0 exp(k t)x x0 exp(k t)
=
=
Si hay n ecuaciones diferenciales de primer orden simultaneas, sediagonaliza la matriz de coeficientes A y se aplica la integracionanterior termino a termino.Para la diagonalizacion se usa la teoria de autovalores y autovectores[T,D]=eig(A) D= inv(T) A T
-
REGLAS DE CRAMER PARA LOS DETERMINANTES
Dado el sistema lineal de ecuaciones
a1x+b1y+c1z = d1a2x+b2y+c2z = d2 ; d = ; = incgnitas
d1d2d
xyz
106Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
a2x+b2y+c2z = d2a3x+b3y+c3z = d3
; d = ; = incgnitasd3 z
Considere el determinante de la matriz
D = = Determinantea1 b1 c1a2 b2 c2a3 b3 c3
X,Y,Z : no nulas
-
Matemticamente se cumple que:
X = a1 b1 c1a2 b2 c2a3 b3 c3
a1x b1 c1a2x b2 c2a3x b3 c3
=X D= X Det(matriz)
Nota: convirtiendo X,Y en variables simblicas
107Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Y tambin se cumple que:
a1x+b1y+c1za2x+b2y+c2za3x+b3y+c3z
b1 c1b2 c2b3 c3
d1 b1 c1d2 b2 c2d3 b3 c3
=X D = X
-
Ahora bien si el vector de entrada d es nulo, d=0 , entonces eldeterminante D=0, pues toda matriz que tenga una columna o una filanula tiene determinante igual a cero.
Es decir, la solucin no trivial de un sistema lineal de ecuaciones,cuando el vector independiente de entrada es nulo, se consiguehaciendo el determinante de la matriz de coeficientes igual a cero.
Al ser el determinante D=0, hay infinitas soluciones (familia de
108Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Al ser el determinante D=0, hay infinitas soluciones (familia desoluciones) . Pinsese en dos rectas paralelas: el hecho de que no seintersecten es equivalente a que se intersecten en infinitos puntos.
Si d0 y D=0, no hay solucin convencional (sistema singular)Si d 0 y D 0, hay solucin convencional.
Situaciones donde hay vectores de entrada nulos, se consiguen confrecuencia en los procesos de diagonalizacin de matrices (anlisismodal)
-
Diagonalizacin de Matrices
En el dominio de las fases (a, b, c) de un sistema elctrico :u= Z I ; u = vector de voltajes I = vector de corrientes
En el dominio de las secuencias o modos ( dominio modal)u= T um I = T Im
109Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
um = T-1 Z T Im = Zm Im
Objetivo: Diagonalizar Z, a traves de la matriz de transformacion TT-1 Z T = Zm = Zmodal= Matriz Diagonal
T= Matriz de Transformacin de la Mano Derecha (a determinar)Z T = T Zm (Notar que T multiplica a Z por la derecha)
-
Ejemplo de dos variables:
=
a bc d
1
a 1 b2c d
T Zm
110Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
=
=
c d 2 c 1 d2
V1 V2 12
1 V1 2 V2
a bV1 V2
c d
= =
-
Para el caso de tres variables
T = Caso 3 columnasV1 V2 V3
Z T = x Zm = V1 V2 V3 1 V1 2 V2 3 V3
111Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Z = V1 V2 V3
de dondeZ V1= 1V1 (Z - 1 U ) V1 = 0Z V2= 2V2 (Z 2 U ) V2 = 0Z V3= 3V3 (Z 3 U ) V3 = 0
U = Matriz Identidad
1 V1 2 V2 3 V3
-
Para cualquiera de estos sistemas de ecuaciones
[ Z i U ] Vi = 0 = Vector Nulohay una solucin, bien si
Vi = 0 (solucin trivial)o si el determinante de la matriz de coeficientes es nulo:
112Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ Z i U ] = 0,de acuerdo a la regla de Cramer justamente discutida. Es decir lascomponentes del vector Vi no son independientes, como se corresponde concualquier sistema de ecuaciones singular (de determinante nulo)Por esta via se obtienen los autovalores del sistema y luego se calculan losautovectores derechos (columnas de la matriz T ). Cada autovector secorresponder con un autovector.
-
Caso Autovalores con Dos Variables
0 11 -1
M =
Autovalores:
113Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
det = 00- 11 -1 - [ T, D ]= eig (M)
Para MATLAB(0- )(-1 - ) 1 = 0+ 2 1 = 02 + 1 = 0a=1 b= 1 c= -1
-
= =
2a 2
- b + -
aCb 4 + 5 +-
825+
+ 1 + 5.7446
114Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
= =
2
+ 1 + 5.7446-
1= -0.5+i0.8662= -0.5+i0.866
Notar que = 5 = Traza (M)
-
Para hallar los autovectores:
[M 1 U ] =00
V11V21
115Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Para 1 = 5.3723 [ M 1 U ] = 0V11V21
-
1 5.3723 2
3 4 5.3723
=
Como esta matriz tiene determinante nulo por definicin, significa queV11 y V21 son linealmente dependientes y la solucin se halla fijando
V11 0V21 0
=
116Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
V11 y V21 son linealmente dependientes y la solucin se halla fijandouno de esos valores (hay infinitas soluciones para los autovectores)Sea V11 = 1 en cualquiera de las dos Ecuaciones, puesconstituyen la misma ecuacin.
Usando 1ra Ec. (1 5.3723) x 1 + 2 V21 = 0 V21 = + 2.18615
Usando 2da Ec. 3 x 1 + (4 5.3723) V21 = 0 V21 = + 2.18615
-
Trabajando con el 2do autovalor
2 = - 0.3723
[ M - 2 U ] = 0V12V22
117Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1 + 0.3723 2
3 4 + 0.3723=
Determinante es cero por definicin hay solo una ecuacin se fija un valor.
00
V12V22
-
Sea V12 = 1 (con cualquiera de las dos ecuaciones):
1.3723 x 1 + 2 V22 = 0 V22 = - 0.68613 x 1+ 4.3723 V22 = 0 V22 = - 0.6861
Luego :
118Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1
1
V11 V12 1 1 0.2389 0.3482T T
V21 V22 2.1861 0.6861 0.7611 0.3482
Comprobacion :5.3723 0T M T D Matriz diagonal de autovalores0 0.3723
= = =
= = =
-
Normalizacin de los Autovectores
Y= norma (Y) =
Definiendo:
a
b2 2a b+
119Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Ynormalizado = = =norma (Y)
a
ba
b
ba +
ba + a /
b /
1
notar que(a)2 + (b)2 = 1
-
V1 = norm (V1) = 2.4039 V1norm =12.1861
0.41590.9093
1 0.8245
Luego, si
120Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
V2 = norm (V2) = 1.2127 V2norm =1
- 0.68610.8245- 0.5657
La normalizacin es un importante procedimiento en los procesos de diagonalizacin de matrices.
Si la matriz original es simtrica:inv (T) = TT
-
Autovectores de la Mano Izquierda
1
1 1 1
De acuerdo a lo visto,para una matriz de coeficientes M :1 0D T M T Matriz diagonal de autovalores de M
0 2Luego, es cierto que :
W11 W12D T T M, con T para uncaso 2x2W21 W22
= = =
= =
121Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
W21 W22En consecuencia :
1 0 W11 W120 2 W2
[ ] [ ]
[ ] [ ]
W11 W12 M11 M121 W22 W21 W22 M21 M22
de donde :M11 M12W11 W12 1 W11 W12M21 M22M11 M12W21 W22 2 W21 W22M21 M22
=
=
=
-
Lo cual se puede generalizar a :Wk k Wk M Wk Autovector k esimo de la Mano Izquierda (vector fila)Entonces :Wk (M k U) 0 Fila de ceros, U Matriz identidadComo ya se vio, si Wk 0, debe cumplirse que :Deter minante[ (M k U) ] 0 escala
= =
= = =
= = r
122Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
1
Esta conclusion es la misma que se alcanzo para la matriz T deAutovectores Derechos. En la practica:
W T Matriz de Autovectores IzquierdosT Matriz de Autovectores Derechos
= =
=
-
AUTOVALORES Y ECUACIONES DIFERENCIALES LINEALES CON COEFICIENTES CONSTANTES
Sea el sistema lineal de Ecuaciones Diferenciales siguiente, de n variablesde estado
A= matriz nxn de coeficientes constantes
( ) ( )datox xx A ; 0 ; t 0 0 = = =
123Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Para resolver este sistema de ecuaciones fcilmente, se diagonaliza lamatriz A, hallando sus autovalores y autovectores . Como ya se sabe:
T= matriz de autovectores de la mano derecha de A
m
x x m x m x
x x XT xm ; modal
T ; modal
= =
= =
-
==
O
TAT
Am= matriz diagonal de autovalores
Luego al estar desacoplados los modos, se plantea para el modo i-esimo:
dxm / dt x m xm ; i 1,n
= = =
124Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
E integrado analticamente:
Es decir :
i i i idxm / dt x m xm ; i 1,n= = =
( ) i ti ix x ;m m 0 i 1, ne= =( )( )
1t
2 t
1 1
2 2
x x
x x
m m 0
m m 0
e
e
=
=
M
-
De donde:
Donde:
( ) tm = e m 0x x
( )( )( )
1m1
2m m2
x
x x
t0
tt ; 0 0
ee e
= = =
125Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Luego para devolverse al dominio del tiempo:
( ) ( )2 m m2x x; 0 0e e= =
MO
( )( )
1 1
1
x x
x x
tT T 0tT T 0
e
e
=
=
=
-
[ ]1
Tmese un casode dimension 2x2 :V11 V12T V1 V2 Matriz de autovectores derechos (por columnas)V21 V22
W11 W12 W1T Matriz de autovectores izquierdos(por filas)W21 W22 W2X1(t) V11 V12X(t)
= = =
= = =
= =
1 te 0 W11 W12 X1(0)
126Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
X(t)X2(t) V21 V= = 2 t
1
1 t
12
22 W21 W22 X2(0)0 eLLamando
K1 W11 W12 X1(0) W1 X1(0)K T X(0)K2 W21 W22 X2(0) W2 X2(0)
X1(t) V11 V12 K1 eX(t)X2(t) V21 V22 K2 e
= = = =
= =
t
-
1 t
12 t
1 t 2 t 1 t 2 t
X1(t) V11 V12 K1 eX(t)X2(t) V21 V22 K2 e
Es decir :X1(t) V11 V12X(t) K1 e K2 e V1 K1 e V2 K2 eX2(t) V21 V22
K1 Contribucion del vector X(0) al Modo 1
= =
= = + = +
=
127Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
K2 Contribucion del vec= tor X(0) al Modo 2
Ntese que si el vector de condiciones iniciales X(0) es proporcional alautovector derecho V1, entonces el escalar K2 es nulo, puesto que Tmultiplicada por T-1 debe ser igual a la matriz identidad. En cuyo casosolo se excita el modo 1. Por el contrario si X(0) es proporcional alautovector derecho V2, resulta que K1 es nulo, excitndose solamente elmodo 2. Si X(0) no es proporcional a ninguno de los autovectoresderechos, todos los modos son excitados. El vector K no tiene entradasnulas en este caso
-
Para un ejemplo numrico, tmese el caso estudiado:
=
=
=
=
5657.09093.08245.04159.0
3723.0003723.5
4321
2
1 TA
( ) ( ) 1 1x x0.5743 0.8371 1 K1 0.2627T ; 0 K T 00.9232 0.4222 1 K2 1.3454
= = = = =
128Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
( ) ( )x xT ; 0 K T 00.9232 0.4222 1 K2 1.3454= = = = =
[ ]
[ ]
0.4159 0.1093V1 K1 0.26270.9093 0.2389
0.8245 1.1093V2 K2 1.34540.5657 0.7611
= =
= =
( )5.3723 t 0.3723 t
5.3723 t 0.3723 tx
Luego :x1( t) 0.1093 1.1093tx 2(t) 0.2389 0.7611
e ee e
+ = =
autovaloreigenvalueeigeig(M)D][T,
==
=
-
Ntese que los trminos exponenciales contienen directamente los dos autovalores. Por ende si algnautovalor es positivo (o de parte real positiva, en el caso complejo), la solucin es inestable o crecientesin lmite con el tiempo.
Es importante notar que las soluciones obtenidas en el tiempo pueden obtenerse sin diagonalizar A,utilizando:
( ) dato== 0; xxAx& ( ) ( ) ( )SXAxSXS = 0[ ] ( ) ( )- xXU S A S 0 = ; U = Matriz Identidad
129Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
( ) [ ] ( )- 1X S U S - A x 0 =
Matriz nxn
Y finalmente:
El resultado es obviamente el mismo, pero hay mas trabajo involucrado, en opinin del autor.
En MATLAB se debe usar en este caso lgebra simblica
-
( )5.3723t
5.3723tx
Siguiendo con el mismo ejemplo,tomese ahora el caso :4.159 K1 1
x(0) 10 V1 K 109.093 K2 0x1(t) 0.1093t 10 Solo se excita el modo 1x2(t) 0.2389
ee
= = = =
= =
130Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Si por el contrario se tuvie
( )0.3723t
0.3723 tx
se :
8.245 K1 0x(0) 10 V2 K 10
5.657 K2 1x1(t) 1.1093t 10 Solo se excita el modo 2x2(t) 0.7611
ee
= = = =
= =
-
Sensitividades de Estados versus Modos (Formas Modales)
[ ]
[ ]
Se ha trabajado con :X1 V11 V12 Xm1X T * XmX2 V21 V22 Xm2
X1 V11 Xm1 Desplazamientos de los Estados al var iar el Modo 1X2 V21X1 V12 Xm2 Desplazamientos de los Estados alX2 V22
= =
=
=
var iar el Modo
131Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
[ ]Xm2 Desplazamientos de los Estados alX2 V22= var iar el ModoLuego, la columna iesima de T, es decir el vector Vi, mide las var iaciones(desplazamientoso excursiones),que experimentan los Estados al excitarse el Modo i. En ingles Vi esdenominado MODAL SHAPE, pues la palabrashape significa " forma" o " figura ".
Si V11=0.4159 y V21=0.9093, como es el caso del ejemplo estudiado,significa que un desplazamiento unitario en el Modo 1, causa en el Estado 1un desplazamiento de 0.4159 y en el estado 2, un desplazamiento de 0.9093.Es decir, el Estado 2, es 2.1863 (=0.9093 / 0.4159) mas sensible que elEstado 1, para variaciones en el Modo 1.
-
Siguiendo con el mismo ejemplo, dado que V12=0.8245 y V22= - 0.5657, setiene que cuando el Modo 2 experimente un cambio unitario, el Estado 1 sedesplaza 0.8245 veces en mismo sentido que el Modo 2, en tanto que elEstado 2, se desplaza 0.5657 veces , pero en sentido contrario al Estado 1.Este desplazamiento opuesto de los Estados esta dictado por el signocontrario de las entradas del autovector derecho V2.Los autovectores izquierdos indican como deben combinarse lasperturbaciones de los Estados para que se excite un Modo en particular, ya
132Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
perturbaciones de los Estados para que se excite un Modo en particular, yaque:
[ ] [ ]
[ ] [ ]
1Xm W X, donde W TEs decir :
Xm1 W11 W12 X1Xm2 W21 W22 X2
X1Xm1 W11 W12 W11 X1 W12 X2X2X1Xm2 W21 W22 W21 X1 W22 X2X2
= =
=
= = + = = +
-
Factores de participacion
Observando la expresin de la evolucin en el tiempo de lasvariables de estado, se nota lo siguiente:
1 t
2 t
X1(t) V11 V12 e 0 W11 W12 X1(0)X(t)X2(t) V21 V22 W21 W22 X2(0)0 e
= =
133Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Si se perturba la variable de estado i-esima solamente, haciendo Xi(0)=1, se excitan todos los modos. Trabajando con el caso de orden dos, excitando X1 inicialmente:
[ ]1 t
2 t
1 t
2 t
X1(t) V11 V12 e 0 W11X(t) X1(0) ; X1(0) 1X2(t) V21 V22 W210 eX1(t) V11 V12 W11 eX(t)X2(t) V21 V22 W21 e
= = =
= =
-
[ ]
[ ]
Observando exclusivamente la evolucion de X(1):1 t
2 t
1 t 2 t
1 t
2 t
W11 eX1(t) V11 V12W21 e
V11 W11 e V12 W21 e
eX1(t) V11 W11 V12 W21e
=
= +
=
134Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
Haciendo lo propio con X2, es decir, con X2(0)=1, se o
e
[ ]btiene:
1 t
2 teX2(t) V21 W12 V22 W22e
=
-
Constituyendo una matriz con estas dos expresiones:
P matriz de participacion
P=
1 t 1 t
2 t 2 t
X1(t) V11 W11 V12 W21 e eP *X2(t) V21 W12 V22 W22 e e
V11 W11 V12 W21V21 W12 V22 W22
= =
=
x1
x2
135Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
V21 W12 V22 W22 x21 2
P11 P12PP21 P22
=
P11=mide la participacin del modo 1 en la formacin de X1, excitando solo X1
P12=mide la participacin del modo 2 en la formacin de X1, excitando solo X1
-
La matriz de participacin es muy til para inferir como cada nodoimpacta una variable de estado en particular, cuando solo dichavariable es inicialmente perturbada.En general esta matriz es compleja (al igual que las matrices detransformacin) y por esa razn, solo tiene sentido su MODULO. Losngulos de fase no tienen ningn significado.En general, la fila i-esima de la matriz de participacin es el producto
136Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
En general, la fila i-esima de la matriz de participacin es el productopunto a punto de la fila i-esima de la matriz V por la columna i-esimade la matriz W.
t Pv W 'W V *P = =
-
0.4159 0.8245= =
0.9093 -0.5657V
-1 0.5743 0.8371= 0.9232 -0.4222W
=
0.4159 0.5743 0.8245 0.9232P0.9093 0.8371 0.5657x( 0.4222)0.2389 0.7612
=
137Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0.2389 0.7612P0.7612 0.2389
=
Se infiere de este ejemplo que el modo 2 impacta en mayor grado ala variable de estado1, en contraposicin con lo que sucede con lavariable de estado 2.
1
2
5.3723 00 0.3723
=
-
0.0000 -0.2246 -0.0774 -0.1164376.9911 0.0000 0.0000 0.00000.0000 -0.1003 -0.3237 0.00060.0000 -0.5554 -0.0020 -1.1476
M=
Sea: x=[w delta Eqp Edp]
L1=-0.16+j 9.19L1=-0.16-j 9.19L3=-0.88L4=-0.27
138Fundamentos de Control del Generador Sincrnico 2014 USB Prof. Juan Bermdez
0.5015 0.5015 0.0025 0.00020.5015 0.5015 0.0025 0.00020.0019 0.0019 0.0275 0.97250.0156 0.0156 0.9776 0.0280
abs(P)=
| *WV ||P| t=[ ] === 1TWTVeig(M)DT,
4321 EdpEqpdeltaw
-
APLICACIN A UN CASO NO LINEAL
Si el sistema de ecuaciones diferenciales es no lineal, se analiza la estabilidaddel sistema, viendo los autovalores del Jacobiano del sistema, c














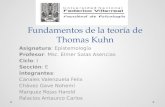
![Teoria general control[1]](https://static.fdocuments.ec/doc/165x107/556cea25d8b42ac3528b5020/teoria-general-control1.jpg)


