FULLTEXT01.pdf
30
MODELOS MATEMÁTICOS Y HERRAMIENTAS DE SOFTWARE PARA LA SIMULACIÓN DE LÍNEAS DE TRANSMISIÓN EN ESTADO DINAMICO Luigi Vanfretti [email protected] ©Luigi Vanfretti. [email protected] Documento presentado en el XXIII Congreso de Estudiantes de Centroamérica y Panamá (CONESCAPAN XXIII) de la IEEE Sección 9, realizado del 22 al 25 de Septiembre de 2004 en la ciudad de Guatemala, Guatemala.
-
Upload
eleazar-sierra-espinoza -
Category
Documents
-
view
35 -
download
5
Transcript of FULLTEXT01.pdf

MODELOS MATEMÁTICOS Y HERRAMIENTAS DE SOFTWARE PARA LA SIMULACIÓN DE LÍNEAS DE TRANSMISIÓN EN ESTADO
DINAMICO
Luigi Vanfretti
©Luigi Vanfretti. [email protected] presentado en el XXIII Congreso de Estudiantes de Centroamérica y Panamá
(CONESCAPAN XXIII) de la IEEE Sección 9, realizado del 22 al 25 de Septiembre de 2004 en la ciudad de Guatemala, Guatemala.

Luigi Vanfretti [email protected] 2
MODELOS MATEMÁTICOS Y HERRAMIENTAS DE SOFTWARE PARA LA SIMULACIÓN DE LÍNEAS DE TRANSMISIÓN EN ESTADO DINAMICO
Luigi Vanfretti [email protected]
1 Escuela Mecánica‐Eléctrica, Facultad de Ingeniería, Universidad de San Carlos de Guatemala. Student Member de la PES (Power Engineering Society) de IEEE.
Resumen
Este documento trata la modelación de líneas de transmisión para el estado dinámico con la finalidad de obtener modelos matemáticos que representen con exactitud el comportamiento de estos elementos durante los fenómenos transitorios. La elaboración de estos modelos, por su naturaleza, involucra el uso de métodos matemáticos especializados que están fuera de la experiencia consciente del profesional de la ingeniería y deben ser estudiados. Estos modelos, son en esencia no lineales (debido a la dependencia de la frecuencia de las líneas de transmisión), por lo que hacen uso de herramientas computacionales para poder resolverlos, así como para obtener los parámetros relacionados con los mismos. Finalmente, la simulación de los fenómenos transitorios, casi en su totalidad, es llevada a cabo por medio de simulación digital; de manera demostrativa se presentará la simulación de transitorios por maniobra en la línea de transmisión Brillantes‐Esperanza utilizando MATLAB® /SIMULINK® y el ATP/EMTP.
Índice 1 Introducción: modelos para el análisis de transitorios en líneas
de transmisión. .................................................................................... 2 2 Filosofía de solución de los fenómenos transitorios...................... 3 3 Línea de transmisión monofásica sin pérdidas. ............................. 7 4 El modelo Bergeron. ........................................................................... 9 5 Mode Analysis – Líneas de conductores múltiples........................ 11 6 Modelos de líneas de transmisión dependientes de frecuencia. 13 7 Parámetros de líneas de transmisión aéreas. ................................ 18 8 Simulación de transitorios. .............................................................. 21 8.1 Análisis con: ATP/EMTP .................................................................. 22 8.2 Análisis con: MATLAB/SIMULINK y la SIMPOWERSYSTEMS
Toolbox ................................................................................................. 26 9 Conclusión.......................................................................................... 28 10 Reconocimientos................................................................................ 28 11 Referencias.......................................................................................... 28
1 Introducción: modelos para el análisis de transitorios en líneas de transmisión.
El estudio del fenómeno transitorio en sistemas de potencia, es en esencia, el estudio de la distribución de energía electromecánica y electromagnética entre los elementos que componen al sistema. En operación de estado estable el intercambio de energía no necesita ser modelado explícitamente y se puede representar por fasores de tensión y corriente en el dominio de la frecuencia. En el estado transitorio, en cambio, el intercambio de energía entre los componentes del sistema estará afectado por los disturbios generados interna o externamente creando corrientes y tensiones excesivas. La predicción de los niveles de intensidad y tensión elevados es el principal objetivo de la creación de modelos para simulación de fenómenos transitorios.
La clasificación de los transitorios electromagnéticos está ligada al tipo de modelo utilizado para la representación de los elementos componentes del sistema. No existe un modelo apropiado para todos los tipos de análisis de transitorios y este debe se determina por el tipo de estudio que se está realizando. La manera más común de clasificar a los transitorios electromagnéticos es por medio del rango de tiempo del estudio, el cuál está relacionado con el fenómeno bajo investigación. La clave en el análisis de fenómenos transitorios está en la modelación de cada uno de los componentes de manera que represente el sistema físico de manera realista bajo el rango de tiempo de interés.

Luigi Vanfretti [email protected] 2
Los disturbios relacionados con descargas atmosféricas, requieren de la simulación en la región de los nano y micro segundos; como es obvio los elementos de control no son capaces de actuar en tal rango de tiempo por lo que las características inherentes del sistema y sus componentes serán las que ejercerán mayor influencia en el comportamiento del sistema. Para los fenómenos debidos a maniobra, tales como conmutación de interruptores, el rango de tiempo para el cuál será simulado el sistema depende del tipo de estudio y de la información accesible, si la preocupación principal es la coordinación de aislamiento el rango será de milisegundos; en los casos de estudios dinámicos de los componentes de control y de las interacciones electromecánicas de las masas y el sistema eléctrico en máquinas rotativas el rango de tiempo lo determinará el estudio y el factor de paso de las iteraciones numéricas deberá ser 1
10 de la constante más pequeña del sistema.
Los elementos que componen los sistemas eléctricos de potencia se dividen en dos tipos: de parámetros agrupados (máquinas eléctricas y bandos de reactores/capacitares) y parámetros distribuidos (líneas de transmisión aéreas y subterráneas); este documento se dedica a la modelación y simulación de los últimos. Es importante, antes de continuar, establecer las definiciones de modelación y simulación:
Modelación:
Una teoría es un enunciado de un principio abstraído de la observación y un modelo es una representación de la teoría que puede ser utilizado para fines de predicción y control. En general, es el proceso de análisis y síntesis desarrollado para llegar a una descripción matemática adecuada que está en armonía con los parámetros y características relevantes del sistema en estudio.
Simulación:
Se refiere a la evaluación del modelo que representa a un sistema con fines de análisis, predicción y control. Para los modelos de tipo matemático, la simulación se refiere a la evaluación numérica de las expresiones matemáticas que representan al sistema bajo diferentes escenarios de operación.
Existen diferentes parámetros que tienen influencia en la correcta representación de las líneas de transmisión y en los componentes de los sistemas eléctricos de potencia; en general el modelo depende del rango de frecuencia y en la duración del fenómeno transitorio de interés. En la tabla 1 se muestra la clasificación de los rangos de frecuencia para la modelación de componentes de potencia [4]:
Rango de Frecuencia
Característica en el dominio del
tiempo
Utilidad de la representación
0.1 Hz – 3 kHz Oscilaciones de baja frecuencia
Sobretensiones temporales
50 Hz – 20 kHz Fallas con frente de onda cortos
Sobretensiones por maniobra
10 kHz ‐ 3MHz Fallas con frente de onda rápido
Sobretensiones por rayo
100 kHz – 50 MHz
Fallas de frente muy rápido
Sobretensiones re‐incidentes
Tabla 1: Clasificación de los rangos de frecuencia para la representación de componentes de sistemas
eléctricos de potencia.
La representación de los elementos individuales del sistema debe corresponder a cada uno de los rangos de frecuencia de la tabla 1. En el caso de oscilaciones de baja frecuencia se puede utilizar el circuito polifásico. Teóricamente una sección puede representar una línea solamente a una frecuencia. Para propósitos prácticos si una frecuencia máxima
π π
máxf tiene que ser representada, el largo de una sección de línea representada por una sección simple no debe ser mayor a:
máxl
π
máxmáx5vlf
= 1
Donde es la velocidad de propagación de la onda electromagnética.
v
Los transitorios de una línea de transmisión sin pérdidas con parámetros distribuidos constantes se calcula generalmente utilizando métodos derivados de la teoría de ondas, uno de estos es el método de Bergeron el cuál se basa en la solución del dominio del tiempo de las ecuaciones diferenciales de la línea. Este método se presentará más adelante.

Luigi Vanfretti [email protected]
3
La selección de modelo de línea de transmisión a utilizar, como se mencionó anteriormente, puede ser resumida en un árbol de decisiones como el que se presenta a continuación:
El límite para el tiempo de propagación está dado por la longitud de la línea dividido c (velocidad de la luz), l c , y este puede ser comparado con el paso
de iteración para verificar si una sección PI o el modelo de tiempo de propagación es apropiado. Existen muchos modelos de circuito PI, el circuito PI nominal y el de parámetros distribuidos son los más conocidos, sin embargo como ya se mencionó estos modelos solamente son adecuados para estudios del estado estable donde se considera solamente la frecuencia fundamental.
2 Filosofía de solución de los fenómenos transitorios.
Es bastante obvio que los problemas de fenómenos transitorios no pueden ser resueltos a mano, excepto en los casos más simples con un pequeño número de elementos aplicando la transformada de Laplace. Uno de los primeros métodos utilizados para la simulación de transitorios son los TNA’s (Transient Network Analizer), sin embargo debido al alto costo de estos no es fácil tener acceso a los mismos. A finales de los años 60 H.W. Dommel publicó el artículo “Digital computer solution of electromagnetic transients in single and multi‐phase networks”, con el cuál se introdujo el método de simulación digital, el cuál se sigue utilizando hasta hoy en día. La idea general es utilizar métodos numéricos aplicados directamente en el dominio del tiempo para computar transitorios electromagnéticos en circuitos constituidos por elementos RLC o elementos “discretizados”.
Una función continua puede ser simulada por medio de la sustitución de una fórmula numérica de integración en la ecuación diferencial y re‐arreglando la función de manera apropiada. Para seleccionar el integrador adecuado se debe tomar en cuenta el error dado a los términos truncados, sus propiedades como diferenciador, el error de propagación y su respuesta en frecuencia. El método NIS constituye la base del método de solución implementado por H. W. Dommel en el EMTP, el cuál es el método más utilizado para la solución y se implementa en el EMTP y en EMTDC por nombrar algunos.
En general, el método pretende resolver los siguientes problemas:
Formar el sistema de ecuaciones diferenciales que modela a la red.
Agrupar las ecuaciones en un sistema coherente el cuál deberá resolverse.
Solucionar, numéricamente, el sistema.

Luigi Vanfretti [email protected] 4
El principal método utilizado es el método de integración trapezoidal, este se utiliza para la sustitución numérica del integrador o NIS (Numerical Integrator Substitution). La principal desventaja de este método es que puede producir oscilaciones numéricas debido a la regla trapezoidal de integración, como por ejemplo [4]: la regla trapezoidal filtra corrientes de alta frecuencia en las inductancias conectadas a fuentes de tensión, desafortunadamente también amplifica las tensiones de alta frecuencia a través de las inductancias en situaciones donde las corrientes son forzadas a través de las inductancias.
Es obvio, hasta este momento, que las computadoras digitales no pueden simular el fenómeno transitorio de manera continua, solamente en intervalos discretos de tiempos llamados, time step o factor de paso, , véase la figura 1. El uso de produce errores de truncamiento que se pueden acumular en cada paso y causar divergencia de la solución real.
t∆t∆
t t−∆ t0 Tiempo
Figura 1: Desarrollo de la computación en discretos. t∆
El comportamiento de una red eléctrica en estado transitorio puede ser expresado a través de un conjunto de ecuaciones diferenciales que describen las relaciones entre voltajes y corrientes. Estas ecuaciones pueden ser resueltas aplicando métodos numéricos de integración repetitivamente. Como se describe en la figura 2, el estado desconocido del sistema en está determinado por el estado anterior computado en . El se asume que es muy pequeño, esto nos lleva a la posibilidad de aproximar las ecuaciones diferenciales a ecuaciones en diferencias. Lo anterior nos lleva a la necesidad de representar los elementos básicos de la red de forma discreta, esto se conoce como la discretización de los elementos R, L y C.
t t=t t t= −∆ t
Resistencia:
La figura 2 presenta el diagrama esquemático de la representación de una resistencia. La ecuación que representa la corriente es: kmi
( ) ( ) ( )1km k mi t v t v t
R= − 2
kv mv
kmi R
Figura 2: Resistencia
El EMTP representa con exactitud la solución de la ecuación 2, si la resistencia tiene valores razonables, es decir que no sea demasiado pequeña [3].
Inductancia:
La ecuación diferencia que rige el comportamiento del diagrama de la figura 3 es:
kmL k m
div v v L
dt= − = 3
mv
L
kv
kmi
Figura 3: Inductancia Integrando la ecuación 2 se obtiene:
( ) ( ) ( )1 t
km k m kmt t
i t v v dt i t tL −∆
= − + −∆∫ 4
Donde es la corriente en t , el estado conocido.
(kmi t t−∆ ) t−∆
Al aplicarle la regla trapezoidal de integración a la ecuación 4 se obtiene:

Luigi Vanfretti [email protected]
5
( ) ( )
( ) ( ) ( ) ( 2
km km
k m k m
i t i t t
tv t v t v t t v t t
L
= −∆
∆+ − + −∆ − −∆ ) 5
( ) ( )
( ) ( )
( ) ( )
=
2
2
km km
k m
k m
i t i t t
tv t t v t t
Lt v t v t
L
−∆
∆+ −∆ − −∆
∆+ −
6
( ) ( ) ( ) ( ) Hist1
=Ikm k meff
i t t t v t v tR
−∆ + − 7
El término que relaciona la contribución de corriente en el presente con el voltaje en el , t∆ t∆
1
effR es una conductancia instantánea y la
contribución de corriente de los previos es una fuente de corriente, . Con estos elementos se puede construir un equivalente de Norton, como en la figura 4:
t∆HistI
( )kmi tk
m
2eff
LRt
=∆
( ) ( )k mv t v t−
( )HistI t t−∆
Figura 4: Equivalente de Norton para la inductancia
La ecuación 7 puede desglosarse en los siguientes términos:
( ) ( )
( ) (
HistI
2
km
k m
t t i t t
tv t t v t t
L
−∆ = −∆ +
∆ −∆ − −∆ ) 8
2eff
LR
t=
∆ 9
La ecuación 9 se conoce como el término instantáneo este relaciona la corriente con el voltaje en el mismo punto, cualquier cambio en alguno de ellos será reflejado en el otro. Como una resistencia efectiva, valores muy pequeños de L pueden dar como resultado un mal condicionamiento de la
matriz de conductancias lo que llevará a oscilación numérica.
Transformando la ecuación 7 en el dominio de la transformada z:
( ) ( )
( ) ( ) ( )
1
1 12
km km
k m
I z z I z
t z V z V zL
−
−
=
∆+ + − 10
Reescribiendo la ecuación 10 se obtiene la función de transferencia entre corriente y voltaje en el dominio z:
( )
( ) ( )
( )( )
1
1
1
2 1km
k m
zI z tV z V z L z
−
−
+∆=− −
11
Capacitancia:
La ecuación diferencial que describe el comportamiento de la figura 5 es:
( )( ) ( )( )k m
km
d v t v ti t C
dt−
= 12
mv
C
kv
kmi
Figura 5: Capacitancia
Integrando la ecuación 12 se obtiene:
( ) ( ) ( )
( ) ( ) ( )1
=
km k m
t
k m kmt t
v t v t v t
v t t v t t i t dtC −∆
= −
−∆ − −∆ ∫ 13
Aplicando la regla trapezoidal a la ecuación 13:
( ) ( ) ( ) ( ) ( )
( ) ( )
2
km k m
k m
km km
v t v t v t
v t t v t t
t i t i t tC
= −
= −∆ − −∆
∆+ + −∆
14

Luigi Vanfretti [email protected] 6
La corriente en el capacitor está dada por:
( ) ( ) ( ) ( )
( ) ( )
2
2
km k m km
k m
Ci t v t v t i t tt
Cv t t v t t
t
= − − −∆∆
− −∆ − −∆∆
15
( ) ( ) ( )[ ] ( )Hist1
Ikm k meff
i t v t v t t tR
= − + −∆ 16
La ecuación 16 considera el término ( )HistI t t−∆ dado por:
( ) ( )
( ) (
HistI
2
km
k m
t t i t t
C v t t v t tt
−∆ =− −∆
− −∆ − −∆∆
) 17
El término instantáneo de la ecuación 16 es:
2eff
tR
C∆= 18
Valores muy altos de C pueden causar mal condicionamiento de la matriz de conductancias llevando a oscilación numérica.
Los elementos anteriores que representan a la ecuación 16 se utilizan para obtener un circuito equivalente de Norton, se presenta en la figura 6:
( )kmi tk
m
2efft
RC∆=( ) ( )k mv t v t−
( )HistI t t−∆
Figura 6: Equivalente de Norton para la capacitancia.
Transformando la ecuación 16 en el dominio z se tiene:
( ) ( )
1
12 2
km km
k m k m
I z I
C CV V z V V
t t
−
−
= −
− − + −∆ ∆
19
Reescribiendo la ecuación 19 se obtiene la función de transferencia:
( )
( )( )
1
1
121
km
k m
zI CV V t z
−
−
−=
− ∆ + 20
Hasta aquí se ha presentado la metodología de solución de los componentes de redes en programas de transitorios. Existen además técnicas de reducción que disminuyen las computaciones creando equivalentes de Norton combinados, pero el tratamiento fundamental es el que se presento en esta sección, para más información consulte [3, 4, 14].

Luigi Vanfretti [email protected]
7
3 Línea de transmisión monofásica sin pérdidas.
El modelo nominal PI es utilizado con frecuencia para representar líneas cortas donde la velocidad de propagación es menor que el time‐step o paso de iteración. En realidad estos modelos son inadecuados para largas distancias. En lugar de utilizar este modelo se utiliza la teoría de ondas viajeras para desarrollar modelos más reales.
La línea de transmisión monofásica sin pérdidas se utiliza para mostrar la capacidad del método NIS y como plataforma para estudio de modelos más complejos y como se desarrolla un modelo desde la teoría de ondas viajeras. Se considera una línea de transmisión homogénea y sin pérdidas como en la figura 7. La inductancia y la capacitancia en paralelo están especificadas en unidades por longitud, ( ),H km F km .
x∆
'C x∆
'L x∆i
v
i i+∆
v v+∆
Figura 7: Sección de una L.T.
Si se considera que la línea aumenta en una longitud x, el voltaje a través de L será:
'i
v L xt
∂−∆ = ∆∂ 21
Cuando , la ecuación 21 será igual a: x d∆ → x
'v
Lx t
∂ = −∂ ∂
i∂ 22
La corriente que carga a la capacitancia , está dada por:
'C x∆
'v
i C xt
∂−∆ = ∆∂ 23
Cuando , la ecuación 23 será igual a: x dx∆ →
'i v
Cx t
∂ = −∂ ∂
∂ 24
El signo negativo en las ecuaciones 22, 24 indican que el voltaje y la corriente decrecen bajo el aumento de la longitud x. La interpretación gráfica de dichas ecuaciones, que es la propagación de una onda en la línea de transmisión se presenta en la figura 8.
0x = x d=
k m
kmi mki−
( ),v x t
( ),i x t
Figura 8: Propagación de onda en una L.T.
Al diferenciar la ecuación 22 respecto a x y la ecuación 24 respecto a t, se obtiene:
2 2
2
2
2
'
'
v iLx
i vC
x t t
∂ ∂=−∂ ∂∂ ∂=−∂ ∂ ∂
2x t∂ 25
Eliminando el término 2i
x t∂∂ ∂
y reescribiendo, se
obtiene:
2 2
2 ' 'v L Cx t
∂ =∂ ∂ 2
v∂ 26
Al resolver las ecuaciones 22 y 24 para i en vez de v nos lleva a una ecuación similar a 26, para la corriente:
2 2
2 ' 'i L Cx t∂ =∂ ∂ 2
i∂
)
)ω
27
Las ecuaciones 26 y 27 constituyen las ecuaciones de onda de una línea de transmisión sin pérdidas. La solución general de estas ecuaciones o solución de D’Alembert están dadas por:
28 ( ) ( ) (1 2,i x t f x t f x tω ω= − + + 29 ( ) ( ) ( 1 2, Cv x t Z f x t f x tω= − + +

Luigi Vanfretti [email protected] 8
Donde:
1: velocidad de propagación, ' '
': impedancia característica, 'C C
L CLZ ZC
ω ω =
=
Ahora consideremos ( )1f x tω− . En y en se asume un valor . En cualquier tiempo
subsiguiente, , tendrá el mismo valor , si el argumento
1t t=
1x x= 1F
2t t> 1 1F( )x tω− permanece sin cambios, esto
significa:
( )1 1 2 2 2 1 2 1x t x t x x t tω ω ω− = − → = + − 30 La ecuación 30 expresa que 1f se ha movido una distancia en la el eje positivo x con una velocidad v como en la figura 9.
1f
1F
1x 2x x1t 2t
Figura 9: Onda viajando positivamente ( )1f x vt−
Similarmente, la función (2 )f x tω+ representa a una onda viajera que se mueve en la dirección negativa del eje x. Tanto ( )1f x tω− como (2 )f x tω+ son funciones arbitrarias representan a una onda que viaja a velocidad en dirección positiva y negativa, como soluciones de la ecuación de onda se requiere únicamente que sean diferenciables y se les conoce como ondas viajeras de corriente forward y backward con respecto a una dirección incremental en x.
ω
Cuando se comparan las ecuaciones 28 y 29, se nota una proporción directa entre las ondas de corriente y tensión que está dada por la impedancia característica de la línea, . Tal y como se presenta en la figura 10 las ondas de corriente y tensión que viajan en dirección positiva del eje x tienen el mismo signo, las ondas que viajan en dirección negativa tienen signo opuesto.
CZ
x( ),i x t
x
( ),v x t
( ),i x t
x
( ),v x t
( ),i x tx
( ),v x t
( ),i x t
Figura 10: Ondas viajeras de forward y backward de tensión y corriente.
Si se multiplica la ecuación 28 por , y luego se suma algebraicamente con la ecuación 29 se obtiene:
CZ
31 ( ) ( ) ( )1, , 2C Cv x t Z i x t Z f x tω+ = − 32 ( ) ( ) (2, , 2C Cv x t Z i x t Z f x tω− = − + )
Cabe recalcar que ( ) ( ), Cv x t Z i x t+ , será constante cuando ( )x tω− es constante y es constante si (
( ) (, ,Cv x t Z i x t− ))x tω+ también es constante. Si d es el
largo de la línea, el tiempo de propagación de la terminal k a la terminal m para observar una constante de ( ) ( ), Cv x t Z i x t+ , está dado por:
' 'd
d L Cτω
= = 33
Tomando en cuenta la expresión 33, tenemos:
( ) ( ) ( ) ((k C km m C mv t Z i t v t Z i tτ τ− + − = + − ))k 34 Reescribiendo la ecuación 34 obtenemos la expresión para la corriente : mki
( ) ( ) ( )1mk m m
C
i t v t I tZ
τ= + − 35
Donde la fuente de corriente debido a las iteraciones anteriores es:
( ) ( ) (1m k km
C
I t v t i tZ
τ τ− = − − − − )τ 36
Similarmente para la corriente : kmi
( ) ( ) ( )1km k k
C
i t v t I tZ
τ= + − 37

Luigi Vanfretti [email protected]
9
Donde la fuente de corriente debido al historial de corriente está dado por:
( ) ( ) (1k m mk
C
I t v t i tZ
τ τ− = − − − − )τ 38
Las expresiones y , se conocen como las ecuaciones características de las ecuaciones diferenciales.
( ) Cte.x tω− = ( ) Cte.x tω+ =
( )kmi tk m
CZ( )kv t
( )kI t τ−
( )mki t
CZ ( )mv t( )mI t τ−
Figura 11: Red equivalente de dos puertos para una línea de transmisión sin pérdidas.
La figura 11 muestra el modelo de dos puertos resultante de las ecuaciones 34 a 38. No existe conexión directa entre las dos terminales y las condiciones de una terminal son vistas con retardo de tiempo (tiempo de propagación de la onda) e indirectamente en la otra terminal a través de las fuentes de corriente.
4 El modelo Bergeron.
El modelo Bergeron es útil para estudios donde es de gran importancia obtener los valores exactos de la impedancia de la línea en estado estable bajo frecuencia fundamental. No debe ser utilizado donde el comportamiento transitorio o harmónico es más importante. El modelo de Bergeron se aplica cuando la información de la línea está disponible en el formato utilizado para estudios de flujo de carga. También es útil para estudiar fenómenos transitorios debidos a frentes de onda rápidos para modelar la propagación de la onda en la línea. Otra de las aplicaciones donde puede ser útil este modelo es para estudios de relevación.
En realidad no existe ninguna solución analítica para la ecuación de onda de una línea de transmisión con pérdidas con sus parámetros R y G en el dominio del tiempo. La línea con pérdidas puede ser representada con el modelo de la sección 3 utilizando resistencia agrupadas conectadas externamente como se puede apreciar en la figura 12. La naturaleza distribuida de la resistencia y su dependencia de frecuencia pueden ser consideradas únicamente a través de aproximaciones numéricas.
k m4R
2R
4R
2d
2d
Figura 12: Modelación de la línea con pérdidas a través de resistencias agrupadas.
( )kmi tk m
CZ( )kv t
2kI tτ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
( )mki t
( )mv t2mI tτ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
4R 4R
CZCZ
2oI tτ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
CZ
( )oi t2R
2nI t τ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
( )ni t
Figura 13: Red de dos puertos del Modelo Bergeron.

Luigi Vanfretti [email protected] 10
El modelo de Bergeron, descrito en el párrafo anterior, es un modelo de frecuencia constante basado en la teoría de las ondas viajeras. La línea es tratada como una línea sin pérdidas pero su resistencia distribuida se representa de forma agrupada utilizando dos secciones en los extremos de la línea. Las resistencias pueden ser insertadas a través de la línea dividiéndola en varias partes, pero se ha comprobado que existe una muy pequeña diferencia en los resultados al hacer esto y por ello se utilizan solamente dos secciones en los extremos. El modelo de resistencias agrupadas, mostrado en la figura 12 y 13, da resultados razonables cuando
, donde es la impedancia característica o surge. Se debe hacer énfasis que este modelo no es adecuado para estudios de alta frecuencia, e.j. estudios de comunicación por onda portadora (power line carrier).
CR Z<< CZ
( )kmi tk m
( )kv t
2kI tτ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
( )mki t
( )mv t2mI tτ⎛ ⎞⎟⎜ − ⎟⎜ ⎟⎜⎝ ⎠
0 4R
Z +0 4RZ +
Figura 14: Modelo de dos puertos para la mitad de la línea.
Si se asigna la mitad de la resistencia del punto medio, como se muestra en la figura 14, se puede describir un modelo para la mitad de la línea:
( ) ( )14 2km k k
C
i t v t I tZ R
τ⎛ ⎞⎟⎜= + − ⎟⎜ ⎟⎜⎝ ⎠+ 39
Donde:
412 4 2 4
Ck m
C C
Z RI t v t i t
Z R Z Rτ τ ⎛ ⎞− ⎟−⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟⎜⎟ ⎟⎜ ⎜− = − − −⎟⎟ ⎟ ⎜⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎟+ + ⎟⎜⎝ ⎠ 2m
τ ⎟⎜ ⎟⎜ ⎟⎜
40
Como solo las terminales son de interés, se pueden eliminar las variables del punto medio colocando en cascada dos modelos para la mitad de la línea, obteniendo el modelo que se presenta en la figura 15.
( )kmi tk m
( )kv t
( )'kI t τ−
( )mki t
( )mv t
( )'mI t τ−
0 4R
Z +0 4RZ +
Figura 15: Modelo Bergeron para líneas de transmisión.
El modelo tiene las mismas características que los modelos anteriores; la diferencia radica en la fuente de corriente que representa a los términos de historia, esta es mucho más complicada pues representa las condiciones de las dos terminales de la línea en el tiempo ( 2t τ− ) . La expresión para la fuente de corriente en la terminal k es:
( )( )
( ) ( ) ( )
( )( ) ( ) ( )
2
2
' 44
4 4
4
Ck m C
C
k C km
C
ZI t v t Z R i t
Z R
Rv t Z R i t
Z R
τ τ
τ τ
−− = − + − −+
−+ − + − −
+
mk τ
41
El modelo Bergeron utilizado en EMTDC tiene dos caminos de frecuencia, uno de alta y otro de baja frecuencia. Esto permite que las pérdidas puedan ser representadas con exactitud en la frecuencia fundamental y que se tengan mayores pérdidas a mayores frecuencias. La línea no está modelada con exactitud para altas frecuencias pues el tiempo de retardo, la impedancia característica y la matriz de transformación se encuentran dentro de los valores de estado estable.

Luigi Vanfretti [email protected]
11
5 Mode Analysis – Líneas de conductores múltiples.
El EMTP ha albergado al análisis de líneas de transmisión de conductores múltiples bajo la filosofía de las transformaciones hacia parámetros tipo “modal” para desacoplar los circuitos mutuamente acoplados y para diagonalizar a las matrices involucradas, el cual se basa en la teoría del análisis de valores y vectores propios, lo que se conoce como eigenanalysis; al conjunto de esta serie de herramientas matemáticas se le conoce como mode analysis, el cual está detallado en [3]. A continuación se considerará la aplicación del mode analysis a líneas de conductores múltiples.
Las ecuaciones 25, pueden ser aplicadas a líneas de conductores múltiples por medio del reemplazo de los voltajes y corrientes de forma escalar por vectores y utilizando matrices de inductancia y capacitancia. Las ecuaciones de propagación de onda en el dominio de la frecuencia está dadas por:
phase 'phase phase
phase 'phase phase
dVZ I
dxdI
Y Vdx
⎡ ⎤ ⎡ ⎤ ⎡⎢ ⎥− = ⎣ ⎦ ⎣⎢ ⎥⎣ ⎦⎡ ⎤ ⎡ ⎤ ⎡⎢ ⎥− = ⎣ ⎦ ⎣⎢ ⎥⎣ ⎦
⎤⎦
⎤⎦
42
Diferenciando las ecuaciones 42, se puede eliminar la tensión o la intensidad, resultando en:
2
phase phase' ' 'phase phase phase phase
d V dIZ Z Y
dx dx
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡⎢ ⎥− = = −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦V ⎤⎦ 43
2
phase phase' ' 'phase phase phase phase
d I dVZ Y Z
dx dx
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡⎢ ⎥− = = −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦I ⎤⎦ 44
La dificultad de tener elementos diagonales en las matrices de las ecuaciones 43 y 44 se resuelve transformando las matrices a un diferente espacio o como se conoce una transformación a sus natural modes. El análisis de valores propios se aplica para producir matrices diagonales, de esta manera se transforma de un conjunto de ecuaciones acopladas a un conjunto de ecuaciones desacopladas en el domino modal. Como resultado, se puede resolver cada ecuación en el dominio modal como si fuera
una línea monofásica utilizando tiempo de propagación modal e impedancia característica modal.
Las transformaciones entre cantidades instantáneas o de fase (denotadas por el subíndice
) y las cantidades modales (denotadas por el subíndice ) difieren para el voltaje y la corriente:
phasemode
[ ][ ]phase v modeV T V⎡ ⎤ =⎣ ⎦ 45
[ ][ ]phase i modeI T I⎡ ⎤ =⎣ ⎦ 46
Sustituyendo la ecuación 45 en la ecuación 43 se obtiene:
[ ][ ] [ ][ ]2
v mode ' 'phase phase v mode
d T VZ Y T V
dx
⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤− =−⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
47
Simplificando 47:
[ ] [ ] [ ][ ] [ ][
21mode ' '
v phase phase v mode mode
d VT Z Y T V V
dx− ]
⎡ ⎤⎢ ⎥ ⎡ ⎤ ⎡ ⎤= = Λ⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
48
El proceso de encontrar la matriz [ ]vT que
diagonaliza a ' 'phase phaseZ Y⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ es el problema de
eigenvalores y eigenvectores, lo que significa que se deben encontrar sus vectores y valores propios. Los elementos diagonales de [ ]Λ son los eigenvalores
del producto de la matriz , y ' 'phase phaseZ Y⎡ ⎤ ⎡⎣ ⎦ ⎣ ⎤⎦ [ ]vT es la
matriz de eigenvectores o matriz “modal” del producto en cuestión. Existen muchos métodos para encontrar los eigenvalores y los eigenvectores. El método más confiable es el de la transformación QR, mientras que el método más eficiente para el cálculo es el esquema de iteración inversa de Wilkingson. El EMTP utiliza el método modificado LR, el cuál es un predecesor del método QR. El EMTDC utiliza una técnica de root squaring desarrollada por Wedepohl. MATLAB® provee del método Schur decomposition el cuál realiza computo de matrices avanzadas sin necesidad de realizar descomposición de eigenvalores. De cualquier manera los eigenvectores no son únicos y cuando son multiplicandos por una constante compleja diferente de cero siguen siendo válidos, por esto es necesaria la normalización [3] de la salida de los datos para permitir que se comparen con diferentes programas.

Luigi Vanfretti [email protected] 12
Para que sea posible generar modelos dependientes de frecuencia, como se verá en la próxima sección, los eigenvectores deben ser consistentes para frecuencias consecuentes, de manera que los eigenvectores formen una función continua de frecuencia para que se pueda aplicar un ajuste a la curva o curve fitting.
Una vez se ha llevado a cabo el eigen‐análisis entonces se pueden obtener las matrices de impedancia y admitancia modal:
[ ] [ ] [ ]1mode phasevZ T Z− ⎡ ⎤= ⎣ ⎦ iT 49
[ ] [ ] [ ]1mode phaseiY T Y− ⎡ ⎤= ⎣ ⎦ vT
50
[ ] ( )( )
modeC
mode
,,i
Z i iZ
Y i i= 51
Donde y [ son matrices diagonales. [ ]modeZ ]
⎤⎦ ⎤⎦
modeY
Dado que los productos y
son diferentes, sus eigenvectores son diferentes a pesar de que sus eigenvalores son idénticos. Ambos
productos están relacionados por y
por lo tanto solamente se necesita calcular uno de ellos. Si se observa el mode i, de la ecuación 48 se tiene:
' 'phase phaseZ Y⎡ ⎤ ⎡⎣ ⎦ ⎣
' 'phase phaseY Z⎡ ⎤ ⎡⎣ ⎦ ⎣
[ ] [ ]( ) 1Ti vT T
−=
2
mode mode 2
iii i
d VV
dxλ
⎡ ⎤⎢ ⎥ =⎢ ⎥⎣ ⎦
52
y la solución general en el punto x de la línea es:
( ) ( ) ( )mode mode mode
Donde:
= onda viajera positiva " "
= onda viajera negativa " "
ix F ix Bi x i i
i ii
F
B
V e V k e V m
V f
V backward
γ γ
γ λ
−= +
=
orward
53
La ecuación 53 contiene dos constantes arbitrarias de integración y por lo tanto n (número de conductores) ecuaciones requiere de 2n constantes arbitrarias. Esto es consistente con la existencia de 2n condiciones de frontera, una para cada extremo del conductor. La ecuación en forma matricial es:
( ) [ ] ( ) [ ] ( )mode mode mode x F x B
ix e k e mγ γ−= +V V V 54
Una línea de n conductores tiene n modos naturales o natural modes. Si la línea de transmisión está perfectamente balanceada las matrices de trasformación no son dependientes de la frecuencia y la transformación trifásica de voltajes de líneas será:
[ ]1 1 1
11 0 2
1 1 1vT
k
⎡ ⎤−⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎣ ⎦
55
Normalizando y arreglando las filas de la ecuación 55 permitirá que esta matriz pueda corresponder con las componentes de Clarke ( ), , 0α β :
312 2
3102 2
1 0 1
1
1
a
b
c
V V
V
V V
α
β−
−
V
⎡ ⎤⎡ ⎤ ⎡⎢ ⎥ ⎤⎢ ⎥ ⎢⎢ ⎥ ⎥⎢ ⎥ ⎢= ⎢ ⎥⎥⎢ ⎥ ⎢ ⎢ ⎥⎥⎢ ⎥ ⎢⎢ ⎥ ⎥⎢ ⎥ ⎢⎢ ⎥− ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
56
0
2 1 11
0 3 33
1 1 1
a
b
c
V V
V
V V
α
β V
⎡ ⎤ ⎡ ⎤⎡ ⎤− −⎢ ⎥ ⎢⎢ ⎥ ⎥⎢ ⎥ ⎢= − ⎢ ⎥⎥⎢ ⎥ ⎢ ⎢ ⎥⎥⎢ ⎥ ⎢⎢ ⎥ ⎥⎢ ⎥ ⎢⎢ ⎥ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
57
Reintroduciendo las cantidades de fase con el uso de la ecuación 45:
( ) x F x Bx e eω −Γ Γ⎡ ⎤ ⎡ ⎤= +⎣ ⎦ ⎣ ⎦V V V 58
Donde:
[ ][ ][ ]
[ ][ ][ ]
1
1
x xv v
x xv v
e T e T
e T e T
γ
γ
−−Γ −
−Γ
⎡ ⎤ =⎣ ⎦⎡ ⎤ =⎣ ⎦
La matriz ( ) xA eω −Γ⎡ ⎤= ⎣ ⎦ es la matriz de propagación
de onda.
Las ecuaciones correspondientes para la corriente son:
( )
( ) ( )
x F x Bx
x F x Bx C
e e
Y e e
ω
ω
−Γ Γ
−Γ Γ
⎡ ⎤ ⎡ ⎤= −⎣ ⎦ ⎣ ⎦⎡ ⎤ ⎡ ⎤= −⎣ ⎦ ⎣ ⎦
I I I
I V V
orward
ackward
59
Donde:
= onda viajera positiva " "
= onda viajera negativa " "
F
B
I f
I b

Luigi Vanfretti [email protected]
13
Los vectores de corriente y tensión en la terminal k de la línea, que se presenta esquemáticamente en la figura 16, son:
60 ( )
( ) ( )
F Bk
F B F Bk CY
ω
ω
= +
= + = −
V V V
I I I V V
Las ecuaciones para el extremo m son:
61 ( )
( ) ( )
l F l Bm
l F l Bk C
e e
Y e e
ω
ω
−Γ Γ
−Γ Γ
⎡ ⎤ ⎡ ⎤= +⎣ ⎦ ⎣ ⎦⎡ ⎤ ⎡ ⎤= − −⎣ ⎦ ⎣ ⎦
V V V
I V V
El signo negativo se debe a la dirección de referencia para la corriente de la figura 16.
Ahora se pueden determinar las expresiones para las ondas viajeras forward y backward de tensión en el punto k:
( ) ( ) 2Fk C kZω ω= +V V I 62
( ) ( ) 2Bk C kZω ω= −V V I 63
Además se pueden determinar las siguientes expresiones:
[ ] ( ) ( ) 2 2F lC k kY eω ω −Γ⎡ ⎤+ = = ⎣ ⎦V I I BI 64
[ ] ( ) ( )
[ ] ( ) ( ) 2 2
B lC m m
lC k k
Y
e Y
ω ω
ω ω
−Γ
−Γ
⎡ ⎤+ = = ⎣ ⎦⎡ ⎤= +⎣ ⎦
V I I
V I
Fe I 65
Finalmente se pueden determinar las expresiones para las ondas viajeras forward y backward de corriente en el punto k:
[ ] ( ) ( )
[ ] ( ) ( ) 2
2
FC k k
B lC k k
Y
e Y
ω ω
ω ω−Γ
= +
⎡ ⎤= −⎣ ⎦
I V I
I V I 66
( )kV ω ( )mV ω
( )kI ω ( )mI ω( )xI ω
x
Figura 16: Línea de transmisión dependiente de frecuencia
6 Modelos de líneas de transmisión dependientes de frecuencia.
La impedancia característica de las líneas dependientes de frecuencia y la matriz de propagación son calculadas inicialmente de los datos de la geometría física de la línea. Para obtener la respuesta de la línea en el dominio del tiempo, se debe realizar una convolución pues es el equivalente a la multiplicación en el dominio de la frecuencia. Esto puede ser realizado eficientemente utilizando convoluciones recursivas. Se lleva a cabo por medio del ajuste de una función racional en el dominio de la frecuencia para la impedancia característica y la constante de propagación dependientes de la frecuencia.
Los parámetros de línea, como se verá más adelante, son funciones dependientes de la frecuencia, las ecuaciones deben ser vistas en el dominio de la frecuencia haciendo un uso extensivo del ajuste de curvas para incorporar los parámetros dependientes en el modelo. Existen dos parámetros importantes que se deben incorporar en el modelo pues afectan directamente la propagación de onda, estos son la impedancia característica y la constante de propagación .
CZγ
La impedancia característica está dada por:
( ) ( )
( ) ( )
( )
( )
' ' '' ' 'C
R j L ZZG j C Y
ω ω ω ωω ω ω ω+= =+
67
La constante de propagación está dada por:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
' ' ' 'R jL G jC
j
γ ω ω ω ω ω
γ ω α ω β ω
= + +
= +
68 La dependencia de frecuencia de la impedancia serie es bastante significativa en la secuencia cero, esto reafirma la importancia de los modelos dependientes de frecuencia para el estado transitorio donde se aprecian voltajes de secuencia cero así como también corrientes de secuencia cero durante fallas de línea a tierra, SLG. Utilizando las relaciones trigonométricas y complejas apropiadas

Luigi Vanfretti [email protected] 14
podemos escribir la notación matricial de las ecuaciones de tensión y corriente.
La tensión y la corriente están dados por: kV kI
( ) ( )
( ) ( )
cosh sinh
sinh coshk m C
km mk mkC
V V l Z lA B
I IC D Y l l
⎡ ⎤⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡Γ Γ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢= = ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢− −Γ Γ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎣⎣ ⎦ ⎣ ⎦
mV
I
⎤⎥⎥⎥⎦
⎦⎤⎥⎥⎥⎦
69 Al reordenar la ecuación 69 obtenemos la siguiente expresión:
( ) ( )
( ) ( )
( ) ( )
1 1
1
coth cosech
sinh coth
km k
mk m
km C C k
mk mC C
I VD B C D B A
I VB B A
I Y l Y l V
I VY l Y l
− −
−
⎡ ⎤⎡ ⎤ ⎡ ⎤⋅ − ⋅⎢ ⎥⎢ ⎥ ⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ − ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣⎡ ⎤⎡ ⎤ ⎡Γ − Γ⎢ ⎥⎢ ⎥ ⎢= ⎢ ⎥⎢ ⎥ ⎢Γ Γ⎢ ⎥⎢ ⎥ ⎢⎣ ⎦ ⎣⎣ ⎦
70
El siguiente paso es aplicar la conversión entre el dominio de “mode” al dominio de variables instantáneas o de fase:
( )[ ] [ ] ( ) [ ][ ]( )[ ] [ ] ( ) [ ][ ]
1
1
coth coth
cosech cosech
v v
v v
l T l T
l T l T
γ ω
γ ω
−
−
Γ =
Γ = 71
La relación de entrada‐salida en corriente alterna de la línea para cualquier frecuencia es:
( )
( )
( ) ( )
( ) ( )
( )
( )
cosh sinh
1 sinh cosh
Ck m
km mkC
l Z lV V
I Il lZ
γ ω γ ωω ω
ω ωγ ω γ ω
⎡ ⎤⎡ ⎤ ⎡⎢ ⎥⎢ ⎥ ⎢⎢ ⎥=⎢ ⎥ ⎢⎢ ⎥ −⎢ ⎥ ⎢⎢ ⎥⎣ ⎦ ⎣⎢ ⎥⎣ ⎦
⎤⎥⎥⎥⎦
ωω
ωω
B A Fω ω ω=
72 Las ondas viajeras forward y backward en la terminal k, son:
73 ( ) ( ) ( ) ( )k k C kF V Z Iω ω ω= + 74 ( ) ( ) ( ) ( )k k C kB V Z Iω ω ω= −Análogamente para la terminal m:
75 ( ) ( ) ( ) ( )m m C mF V Z Iω ω ω= + 76 ( ) ( ) ( ) ( )m m C mB V Z Iω ω ω= −
La ecuación 74 puede ser vista como un circuito equivalente de Thevenin, de la figura 17, en el cual
es el voltaje en terminales, la fuente de voltaje y la impedancia característica , la impedancia serie.
( )kV ω ( )kB ω( )CZ ω
La onda viajera backward en el punto k es la onda viajera forward en m multiplicada por la matriz de propagación:
77 ( ) ( ) ( )k m
( )CZ ω
( )kB ω( )kV ω
( )kI ω
( )mV ω
( )mI ω( )CZ ω
( )mB ω
ω
ω
m
k
Figura 17: Circuito equivalente de Thevenin para la línea dependiente de frecuencia.
Reescribiendo la ecuación 73 para obtener , y sustituyendo en la ecuación 77, luego
utilizando la ecuación 75 para eliminar se tiene:
( )kV ω( )mF ω
( ) ( ) ( ) ( ) ( ) ( ) ( ) k C k m C mV Z I A V Z Iω ω ω ω ω ω= + + 78 Arreglando la ecuación 78 se obtiene la forma de Norton de la línea de transmisión dependiente de frecuencia:
79
( ) ( ) ( ) ( ) ( ) ( ) ( ) k C k m C mI Y V A I Y Vω ω ω ω ω ω= − +
Los términos de historia están dados por las siguientes expresiones:
80 ( ) ( ) ( ) ( ) historiak C mI A Y V Iω ω ω ω= +
81 ( ) ( ) ( ) ( ) historiam C kI A Y V Iω ω ω ω= +
El modelo de la línea de transmisión dependiente de frecuencia de Norton se muestra en la figura 18.
k m
historiakI
historiamI
( )kI ω ( )mI ω
( )kV ω ( )mV ω( )CY ω ( )CY ω
Figura 18: Circuito equivalente de Norton para la línea dependiente de frecuencia.

Luigi Vanfretti [email protected]
15
Transformación del dominio de la frecuencia al dominio del tiempo.
Las ecuaciones 78 y 79 que están en el dominio de la frecuencia, se pueden transformar utilizando el principio de convolución:
( ) ( ) ( ) ( ) ( ) ( )t
m m mA F a t f t a u f t u duτ
ω ω ⇔ ∗ = −∫ 82
Donde:
83 ( ) ( ) ( ) ( )l l l jA e e e eγ ω α ω β ωω −Γ − − −= = = l
l
es la matriz de propagación.
La matriz de propagación es dependiente de la frecuencia y se comprende de dos componentes, la componente de atenuación y la componente de cambio de fase . En el dominio del tiempo el equivalente de ambas componentes son y , donde es la transformación en el dominio del tiempo (respuesta al impulso) de y es el retardo de tiempo (tiempo de propagación). El límite inferior de la integral en la ecuación 82, , es el tiempo en segundos que un impulso utiliza para viajar de un extremo de la línea al otro.
( )le α ω−
( )je β ω−
( )a t β( )a t
( )le α ω− β
τ
Convirtiendo las ecuaciones 78 y 79 al dominio del tiempo obtenemos:
( ) ( ) ( ) ( ) ( ) ( )k C km m C mkv Z t i t a t v t Z t i t= ∗ + ∗ + ∗ 84
85 ( ) ( ) ( ) ( ) ( ) ( )k C km C mk mi Y t v t a t Y t v t i tτ= ∗ − ∗ ∗ − −
Este procedimiento se puede evaluar utilizando la convolución recursiva si ( )a u es un exponencial. Esto puede se obtenido utilizando las expansiones en fracciones parciales de una función racional para representar en el dominio de la frecuencia como una transformada inversa de Laplace de
( )A ω
m
m
ks p+
la cual es . Dicho lo anterior, la
ecuación de convolución 82 será:
mp tmk e−
86 ( ) ( ) ( )m
tp T
m my t k e f t T dTτ
−= −∫Para una sola iteración la ecuación 86 será:
( ) ( ) ( )0
m mt
p t p Tmy t e y t t k e u t T dT
∆− ∆ −= −∆ + −∫ 87
Lo anterior es un proceso recursivo pues se deriva de
( )y t( )y t t−∆ con una simple integración
sobre la iteración. Si la entrada se asume constante durante la iteración, está puede ser tomada afuera de la integral de la siguiente manera:
( ) ( ) ( )
( ) ( ) ( )
0
1
m m
m m
tp t p T
m
p t p tm
m
y t e y t t k e u t T dT
ke y t t e u t t
p
∆− ∆ −
− ∆ − ∆
= −∆ + −
= −∆ + − −
∫∆
88
Si la entrada de la ecuación integral se asume como lineal:
( )( ) ( )
( )u t t u t
u t T T u tt
−∆ −− = +
∆ 89
la ecuación recursiva será:
( ) ( ) ( )( ) ( )
11
1 1
1 1
m
m
m
p t tmn p t
m
t tmp t
m
ky t e x e u t
pk
e e u tp
α
α α
− ∆ − ∆− ∆
− ∆ − ∆∆
= + − −
+ − + − − t∆
))
90
La constante de propagación puede ser aproximada por la siguiente función racional:
( )( )( ) (( )( ) (
1 2aprox.
1 2
...
...ns
m
s z s z s zA s e
s p s p s pτ− + + +
=+ + +
91
El retardo de tiempo, el cual corresponde al cambio de fase en el dominio de la frecuencia, se implementa utilizando los términos de historia. La fracción parcial del residuo de la función racional se expresa por:
( )( ) ( )( )( ) ( )
( ) ( ) ( )
1 2
1 2
1 2
1 2
...
...
...
n
m
n
n
s z s z s zk
s p s p s pk k k
s p s p s p
+ + ++ + +
= + + ++ + +
92
La transformada inversa está dada por:
93
( ) 1 1 2aprox. 1 2 ... np p t p t p
na t e k e k e k eτ− − − −= ⋅ + ⋅ + + ⋅ t
La figura 19 muestra la magnitud y el ángulo de fase de la función de propagación como una función de la frecuencia, para una línea monofásica, donde l es la longitud de la línea. La constante de propagación se expresa como
para hacer énfasis en que es una función de la frecuencia.
( ) ( )( )j le α ω ω β− +
( ) ( )jα ω ω β− +

Luigi Vanfretti [email protected] 16
La amplitud, en la figura 19 (a), es curva típica pasa bajos y dado que el largo de la línea se encuentra en el exponencial, mientras más larga sea la línea mayor será la atenuación de las ondas. La figura 19 (b) muestra el ángulo de fase de la función de propagación, se nota que tiende a ser más negativo mientras aumenta la frecuencia. Un ángulo de fase negativo representa un atraso de fase o desfase en la forma de onda que atraviesa desde un extremo hacia el otro de la línea y su contraparte en el dominio del tiempo es el retardo de tiempo o tiempo de propagación. El ángulo de fase responde a una función continua que es crece negativamente. Esta es una función muy difícil de ajustar, y requiere de una función racional de orden superior para alcanzar la exactitud suficiente. La multiplicación por , donde representa el tiempo de propagación nominal para una onda, produce la función que se presenta en la figura 19 (b). Este procedimiento es referido por el nombre back‐winding y el cambio de fase resultante puede ser ajustado fácilmente con una función racional de orden inferior. Para obtener la respuesta correcta, el modelo debe tomar en cuenta el avance de fase introducido en el ajuste del dominio de la frecuencia. Esto se lleva a cabo en el dominio del tiempo por medio del retardo de tiempo . Para lo anterior se utiliza una memoria de términos de historia de voltajes y corrientes en cada extremo de la línea y los valores que son afectados por .
jse τ− τ
τ
τ
(A
( )Atenuación te α ω−=
( ) ( )Angulo Atenuación te β ω−=
Mag
nitu
d(
)A
ngul
o gr
ados
( )log ω
Original
Con back winding−
(a)
(b)
Figura 19: Magnitud y ángulo de fase para la función de propagación. Fuente: [1].
La figura 20 presenta el ajuste obtenido cuando se aplica la técnica de ajuste de mínimos cuadrados o least squares de una función racional con el numerador de orden 2 y el denominador de orden 3. El número de polos es normalmente mayor que el de ceros pues la magnitud de la función de atenuación debe acercarse a cero cuando la frecuencia se acerca al infinito. El ajuste es bueno pero una inspección meticulosa demuestra que existe un pequeño error en la frecuencia fundamental. Cualquier discrepancia en la frecuencia fundamental se muestra como un error de estado estable, esto es indeseable. La causa de esto es que la técnica de ajuste por least squares de los polos tiende a “manchar” el error a través del rango de frecuencia. Para controlar el problema, un factor de peso se aplica a un rango específico de frecuencias cuando se aplica la técnica de ajuste. Cuando se ha terminado el ajuste cualquier ligero error puede ser removido por medio de la multiplicación de una función racional por una constate k para obtener el valor correcto a bajas frecuencias. Esto establece la ganancia de corriente directa de la función racional ajustada. El valor de k controla la ganancia de corriente directa de la función racional y se calcula de la resistencia y de la impedancia característica en corriente directa asegurando que se pueda representar la resistencia de corriente directa que propone el modelo.
Constante de Propagación
Mag
nitu
d(
)A
ngul
o gr
ados
( )log ω
Con back winding−
(a)
(b)
Actual
Ajustada
Figura 20: Constante de propagación ajustada. Fuente: [1].

Luigi Vanfretti [email protected]
17
Algunas técnicas de ajuste obligan a que los polos y ceros sean reales y estables, mientras que otras permiten polos complejos y el uso de otros métodos para permitir ajustes estables. La práctica común es asumir una función de fase mínima y utilizar la mitad del plano real. El ajuste puede ser llevado a cabo en dominio s o en el dominio z, cada alternativa tiene sus ventajas y desventajas. Se puede utilizar el mismo algoritmo para ajustar la impedancia característica, el número de polos y ceros. Dado que la expansión parcial de una función racional es:
( )( ) ( )( )( ) ( ) ( ) ( )
1 2 10
1 2 1
.....
..n n
n
s z s z s z kk k
s p s p s p s p s p+ + +
= + + ++ + + + + n
k
94
Para determinar la impedancia característica desconociendo la conductancia shunt , está se asume como cero y para bajas frecuencia, la impedancia tiende a ser mayor mientras disminuye la frecuencia:
( )'G ω
( ) ( )
( )00
' ''C
R j LZ límj Cωω
ω ω ωω ω→→
+= → ∞ 95
En la práctica la impedancia característica no tiende a infinito cuando el rango de frecuencia tiende a cero, en su lugar:
( ) ( )
( ) ( )
( )
( )00
'' '' ' '
DCC
DC
RR j LZ límG j C Gωω
ωω ω ωω ω ω ω→→
+= ⇒+
96
Para mitigar el problema se debe introducir una frecuencia de arranque que aplana la curva de impedancia a bajas frecuencias y la hace más realista. Mientras más alta sea la frecuencia de arranque mayor será la conductancia y por ende mayor será la pérdida shunt, se debe seleccionar cuidadosamente mediante el estudio de la línea.
El modelo en el dominio de frecuencia modelado directamente en el dominio de fase (Direct Phase Model)
En años recientes ha surgido la necesidad de un modelo de líneas de transmisión con la capacidad de representar las interacciones indeseables entre sistemas de DC y AC. El EMTDC más resiente
contiene una técnica de ajuste de curva para el dominio de fase. El modelo dependiente de frecuencia tradicional no es adecuado para simular con exactitud tales situaciones, adicionalmente a su inexacta representación de líneas con geometrías asimétricas.
El EMTDC incorporó el modelo de dominio en frecuencia modelado en fase o phase domain para proveer de una forma general y exacta para modelar en todo el rango de frecuencia. En este modelo la matriz de propagación es inicialmente ajustada en dominio modal, y se determinan los polos y los retardos de tiempo. Los modos con retardo similar son agrupados, estos polos y retardos son utilizados para ajustar la matriz de propagación en el dominio del tiempo bajo la salvedad que todos los polos contribuyen a todos los elementos de la matriz de propagación. El siguiente paso es la resolución de una ecuación lineal que involucra todos los términos de la matriz de propagación bajo la técnica de mínimos cuadrados para determinar los residuales desconocidos. Todo lo anterior significa que el modelo dependiente de frecuencia modelado en fase trasciende al problema de la matriz de transformación por la formulación directa de las ecuaciones en el dominio de fase. Como resultado los elementos de la matriz de transformación y la admitancia característica son ajustados en el dominio de fase, el ajuste de la admitancia característica es relativamente sencillo pero el de la matriz de transformación es complicado pues sus elementos poseen contribuciones modales con coeficientes variables en el tiempo. Para más información consulte [14, 7], la segunda cita detalla el método de modelación directa en el dominio de fase.
pA
En la actualidad, solamente el EMTDC tiene la opción de este tipo de modelo, el EMTP y el MICROTRAN solamente cuentan con modelos tradicionales y dependientes de frecuencia.

Luigi Vanfretti [email protected] 18
7 Parámetros de líneas de transmisión aéreas.
Existen diferentes métodos para calcular los parámetros eléctricos de la geometría física de una línea, el método más común es el de Carson. En general, casi todos los programas de simulación incluyen una subrutina para este fin, en algunos casos esta tiene un costo elevado, y en otras ocasiones es parte del software. El programa MicroTran cuenta con una rutina llamada mtLine y fdData [16], que se utilizan para determinar los parámetros de líneas y el ajuste a curvas de líneas dependientes de frecuencia, respectivamente. El programa EMTP cuenta con una serie de subrutinas llamadas LINE CONSTANTS, CABLE CONSTANTS y CABLE PARAMETERS. Uno de los inconvenientes de estos programas es que su uso debe ser estrictamente académico, en el caso de no contar con una licencia. El programa TLMPC es un programa desarrollado en Matlab por el autor de este documento y aún se encuentra en una etapa de mejoras. En general se basa en las ecuaciones de Carson para obtener los parámetros de las líneas de transmisión, diagonalización y en el análisis modal para modificar las matrices. En la siguiente sección, de simulación, se mostrará bajo que conceptos teóricos operan estos programas. En realidad, es más importante conocer la forma en la que se derivan las expresiones de las cuales se utilizan en los paquetes que simplemente obtener resultados de los mismos.
Impedancia Serie
Para determinar la impedancia serie, esta se puede dividir en dos componentes: la impedancia interna, la cual afecta solamente a los elementos diagonales, y la impedancia externa; esto se representa a través de la siguiente expresión:
( )cos
02 2
0
cos sinln 2
2
ijijij
ijij ij
eDjZ d
d j r
α θ α θωµ απ α α
−∞⎧ ⎫⎪ ⎪⎛ ⎞⎪ ⎪⎟⎜⎪ ⎪⎟⎜= +⎨ ⎬⎟⎜ ⎟⎪ ⎪⎟⎜ + + ⋅⎝ ⎠⎪ ⎪⎪ ⎪⎩ ⎭∫ 97
El primer término de la ecuación anterior se conoce como la impedancia externa del conductor, asumiendo que la conductividad de la tierra es perfecta. El segundo término es la integral de Carson, esta define la impedancia adicional que se debe al retorno imperfecto por tierra.
ijd
i
j
i jY Y−
jY
iY
ijD
i jX X−
ij
YY
+ijθ
TIERRA
IMAGENDE LOS
CONDUCTORES
Figura 20: Geometría de las líneas de transmisión.
Los valores y de la ecuación 97 están
dados por: ijD ijd
( ) ( )
( ) ( )
( )
2 2
2 2
Propia de los conductores agrupados
Si
Si
2
ij i j i j
ij i j i j
ij i
ij i
i j
D X X Y Y
d X X Y Y
i j
D Y
d GMR
≠
= − − +
= − − −
=
=
=
98

Luigi Vanfretti [email protected]
19
Las alturas y son alturas promedio medidas desde el nivel del suelo que se presentan en la figura 21, se pueden expresar como:
iY jY
23promedio torre flechaY Y Y= − 99
La evaluación de la integral de Carson, en la
actualidad, se realiza por medio de integración numérica; anteriormente, como en [16], se utilizaban series asintóticas o expresiones en forma de potencias. La utilización de dos integrales de Carson, una para alta frecuencia y otra para baja frecuencia, resulta en discontinuidades para los modelos dependientes de frecuencia cuando se cambia de una expresión a otra, esto se traduce a un ajuste más complicado. Es importante hacer énfasis en que cada una de las rutinas de cálculo de parámetros de los paquetes de simulación tiene su propia forma de interpretar o reducir la expresión 97.
Una práctica común es la utilización de la fórmula de Deri [16, 1] la cuál es el concepto de penetración compleja, donde:
( )
( )
( ) ( )
cos
2 20
22
2 2
cos sin2
2 2
ijij
ij
gi j i j
i j i j
ed
j r
Y Y X Xj
X X Y Y
α θ α θα
α α
ρωµ
−∞
+ + ⋅
⎛ ⎞⎟⎜ + + + −⎟⎜ ⎟⎜⎝ ⎠≈
− − −
∫ 100
Capacitancia Shunt
Para determinar la capacitancia shunt, se debe evaluar la matriz de coeficientes de potencial:
'
0
1 ln2
ijij
ij
DP
dπε
⎛ ⎞⎟⎜ ⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠ 101
La matriz de coeficientes de potencia relaciona los voltajes con la carga por unidad de longitud:
[ ]'P=V q 102 Por lo tanto, la matriz de capacitancias está dada por:
[ ] [ ] 1'C P −= 103
Conductores agrupados
El agrupamiento de subconductores se utiliza para reducir la fuerza del campo eléctrico en la superficie de los conductores, cuando se compara con un único conductor de mayores proporciones. Esto reduce, de manera significativa, el efecto corona. Existen dos métodos para el agrupamiento de subconductores:
• Reemplazar los conductores agrupados por un único conductor equivalente; método GMR.
• Representar explícitamente los subconductores y, utilizar reducción y eliminación matricial de los subconductores; método riguroso.
Método GMR
El este método se calcula el GMR (Geometric Mean Radius) o radio medio geométrico y se utiliza un solo conductor con la GMR calculada para representar el conjunto de conductores. El GMR está definido por:
1
1
nnequiv conductor Conjunto
nnequiv conductor Conjunto
GMR n GMR R
R n R R
−
−
= ⋅ ⋅
= ⋅ ⋅ 104
Los elementos de la ecuación 104 se describen a continuación:
= número de conductores en el conjunto
= radio del conjunto
= radio del conductor
= radio equivalente
= GMR de un conductor individual
Conjunto
Conductor
equiv
Conductor
equiv
n
R
R
R
GMR
GMR = GMR equivalente
La desventaja de este método es que la GMR ignora los efectos de proximidad y debido a esto solamente es válido que el espacio entre subconductores sea menor que el espacio entre las fases de la línea. Un tratamiento de este método puede ser encontrado en los textos clásicos de Análisis de Sistemas de Potencia.

Luigi Vanfretti [email protected] 20
Método Riguroso
Este método utiliza el acercamiento matricial, y es el que utilizan la mayoría de los programas de simulación [3,6,14,16]. Aquí todos los subconductores son representados explícitamente en la matriz [ ]'Z y la matriz , por ejemplo, para una línea de transmisión de tres fases, con cuatro subconductores y considerando el retorno por tierra perfecto, las matrices serían del orden de 12 . El procedimiento de eliminación es el mismo para ambas matrices, y el objetivo es reducir la matriz original o física a una matriz equivalente de tres fases.
[ ]'P
12×
Si la fase A está comprendida de 4 subconductores: A1, A2, A3 y A4; R representa el equivalente total de la fase A, entonces la suma de las corrientes de los subconductores es igual a la corriente de fase y el cambio de tensión con la distancia es el mismo para todos los subconductores:
1 2 3 4
1
i
R FASE
n
A Ri
AA A A A A
I I
dVdV dV dV dV dVdx dx dx dx dx dx
=
=
= = = = =
∑105
La figura 21 ilustra como se lleva a cabo el proceso de reducción matricial. En la figura (a) se muestra como se introduce en lugar de . Como
, la columna debe ser sustraída de las columnas , y . El restar la fila de las filas , y como en la figura (b), resultara en un vector
RI 1AI
1 2 3 4A R A A AI I I I I= − − −
2A1A
3A 4A
1A 2A 3A 4A
2AV dx igual a cero, dado que
V dx es el mismo para cada subconductor. Luego,
como se muestra en la figura (c), el particionamiento permite que se lleve a cabo la reducción de Kron para obtener la ecuación reducida de la figua (d) la cuál expresa:
[ ] [ ] [ ][ ] [ ]1Reducida 11 12 22 21' ' ' 'Z Z Z Z −= − 'Z 106
El método incluye los efectos de proximidad y por lo tanto es generalmente más exacto; la diferencia entre el uso del método GMR y este método es muy pequeña cuando el espaciamiento de fases es mucho mayor que el espaciamiento entre subconductores.
Figura 21: Eliminación matricial de los subconductores. Fuente: [1].

Luigi Vanfretti [email protected]
21
Conductores de Tierra
Cuando los conductores de tierra son contínuos y están aterrizados en cada una de las torres, entonces para frecuencia debajo de 250 kHZ es razonable asumir que el potencial del cable de tierra es cero a lo largo de la línea. El proceso de reducción para [ ]'Z y para es el mismo. [ se reduce antes de que intervenga para generar la matriz de capacitancias.
[ 'P ] ]'P
Asumiendo que los conductores están aterrizados continuamente en cada una de las torres, entonces:
0tierradVdx
= 107
108 0tierraV =Si se particiona entre conductores de fase, identificados por el subíndice C y conductores de tierra, con el subíndice t, se tendrá:
[ ]
[ ][ ]
[ ][ ]
' '
' '
Reducida
0
'
CC
CC Ct C
t ttC tt
CC
dV dV Z Z Idx dxdV IZ Zdx
dVZ I
dx
⎡ ⎤⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥ ⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥− = =⎣ ⎦ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣⎢ ⎥ ⎣ ⎦⎣ ⎦⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦⎡ ⎤
− =⎢ ⎥⎢ ⎥⎣ ⎦
⎥⎦ 109
Donde:
[ ] [ ] [ ][ ] [ ]1Reducida ' ' ' 'CC Ct tt tCZ Z Z Z −= − 'Z 110
Cuando existe más de un conductor de guarda y los mismos contienen subconductores, se utiliza la misma técnica de reducción que para los conductores de fase.
8 Simulación de transitorios. Los fenómenos transitorios han obligado a que se desarrollen modelos matemáticos detallados para que estos puedan reproducir, con exactitud, el comportamiento de los elementos componentes de los sistemas de potencia de interés. En esta sección es de nuestro interés observar como se aplica la utilización de diferentes programas de software para la simulación de transitorios en la línea de transmisión Brillantes‐Esperanza.
La tarea de simulación no es sencilla pues implica el conocimiento del sistema a simular, la capacidad de modelar el sistema matemáticamente y/o esquemáticamente y de la obtención de parámetros reales para la modelación de las componentes del sistema que produzcan resultados significativos. Sobre este último punto se basa el mayor desafío, pues puede llegar a ser muy difícil contar con toda la información necesaria y aún más difícil será dar la interpretación de estos parámetros para formar un modelo o esquema representativo del sistema.
Dicho lo anterior, se propone la realización de modelos simplificados de la línea que estamos investigando, es necesario utilizar modelos realmente simples de los sistemas para poder obtener resultados “razonables” y verificables de alguna manera por medio de matemática analítica, mediciones reales, estadísticas o puramente sentido común. Las simulaciones que se desarrollarán en esta sección nos proporcionan una fuente de análisis y observación para poder comprender con más profundidad los fenómenos transitorios. Una de las ventajas proporciona la simulación es la visualización del fenómeno: podemos observar claramente las oscilaciones que se presentan, así como factores de atenuación, operación de sistemas de relevo, etc.; otra ventaja es la posibilidad de “observar” los intervalos de tiempo en que se producen los transitorios, este punto es crucial, si una persona no es capaz de concebir ni de tener definido que es una unidad de tiempo , mucho menos será capaz de comprender la complejidad de los fenómenos que ocurren en un sistema de potencia en intervalos de tiempo de esta magnitud.
sµ

Luigi Vanfretti [email protected] 22
8.1 Análisis con: ATP/EMTP Parámetros y modelo de la línea
Una de las tareas más difíciles para poder modelar una línea con un modelo matemático es la obtención de parámetros significativos, es decir, parámetros que representen adecuadamente a la línea real en el modelo matemático, dando así la capacidad de reproducir el funcionamiento del sistema y poder realizar simulaciones de eventos específicos.
Dado que esta tarea puede ser simplificada por los programas de ordenador podemos utilizarlos. El ATP/EMT contiene una gran cantidad de modelos con los cuales se pueden representar de manera diferente a las líneas de transmisión, la selección del modelo depende del tipo de oscilaciones que creemos que se van a dar en el sistema para el tipo de evento que queremos simular, es decir, del rango de frecuencias de las oscilaciones. Para la obtención de datos de parámetros de línea se utiliza la rutina LINE CONSTANTS del EMTP de la misma manera que en [21, 22].
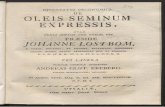
Figura 22: Configuración del 30% de la línea.
Figura 23: Configuración del 70% de la línea.
En general, la técnica utilizada anteriormente por el autor de este documento, consiste en encontrar el porcentaje de cada tipo de torre que compone la línea, asignarle una longitud equivalente y computar los parámetros para cada una de las secciones de línea [21, 22].
No se hará énfasis en está ocasión del procedimiento para obtener las matrices de impedancias y los datos generados por el EMTP pues ya ha sido tratado en ocasiones anteriores [21, 22]. En esta ocasión nos fijaremos en la verificación del modelo JMarti, el cuál se utilizará para las simulaciones subsiguientes, esto es posible a través de EMTP [4, 5, 23]. El modelo JMarti, es un modelo dependiente de frecuencia el cual es ajustado a un rango de frecuencia comenzando del parámetro de frecuencia inicial (estado estable) hacia un límite de frecuencia superior especificada por el número de décadas y el número de puntos por década.
Observe la figura 23, en la figura 23 (a) está representada por una línea azul el modelo JMarti y en rojo el modelo exacto pi para el 70% de la línea, siguiendo la misma metodología de [21]; en la figura 23 (b) se muestran los mismos parámetros

Luigi Vanfretti [email protected]
23
que en la figura 23 (a) pero ahora para el 30% restante de la línea; la gráfica simboliza el ajuste de impedancia de secuencia negativa a la frecuencia con la que será utilizado el modelo, podemos darnos cuenta que para modelos de frecuencia menor a 5 Hz el modelo PI no será útil, en cambio para frecuencias de 20Hz y superiores el modelo presenta un ajuste aceptable. Dicho esto, el modelo JMartí, será utilizado para las simulaciones con ATP/EMTP dada su mayor exactitud con respecto al modelo PI.
0.0 0.7 1.3 2.0
log(freq)-0.6
0.1
0.8
1.5 log(| Z |)
(a)
0.0 0.7 1.3 2.0
log(freq)-0.6
0.1
0.8
1.5 log(| Z |)
(b)
Figura 23: Modelo JMarti para (a) 70% y (b) 30% de la línea.
Transitorios por energización de la línea
Esta simulación supone la apertura de la línea en la subestación de Esperanza, debido a esto se estudian los transitorios por energización de la línea utilizando un interruptor de potencia que energiza cada una de las fases en diferentes tiempos creando así inducción entre las fases cada vez que se abre el interruptor. La red se modela por un circuito equivalente de Thevenin cuya impedancia es de 44.26Ω , se utiliza el voltaje pico por fase como fuente de tensión y finalmente la línea se modela utilizando el mismo procedimiento que en [21, 22]. El archivo de ATP/EMTP generado se muestra en la figura 24.
U ZthSEN REC
Figura 24: Archivo energización.adp
(file energización.pl4; x-var t) v:SENA v:SENB v:SENC 32 34 36 38 40 42[ms]
-200
-150
-100
-50
0
50
100
150
200
[kV]
Figura 25: Tensiones por fase en el extremo de envío.
Como se puede observar en la figura 25 el interruptor actúa para diferentes tiempos en cada uno de las fases, para la fase A en 0.03333 s., para la fase B en 0.0361 s., y para la fase C en 0.0388; debido a esto se puede observar en la gráfica que en el momento en que se energiza la fase A, estando la fase B y C desenergizadas se produce un voltaje

Luigi Vanfretti [email protected] 24
inducido en estas, la mismo ocurre durante la energización de las otras dos fases, este transitorio no es de una magnitud muy grande (inducción máxima de 50KV) pero si la línea estuviera alimentando alguna carga no solo causaría daños por la energización a temporal, si no que también introduciría una gran cantidad de ruido afectando la calidad de la energía.
En la figura 26 se pueden apreciar los transitorios en el extremo de recibo de la línea. Aquí se produce un transitorio de tensión que debe ser de consideración, si el voltaje pico de fase a tierra es 1877794.21 V podemos observar que la fase A llega a una tensión de 375KV, valor que es casi dos veces la tensión normal. Por el mismo efecto se produce un transitorio en la fase B, aunque ahora de una menor intensidad llegando este hasta 230KV, en la fase C que es la última en energizarse se produce un transitorio que apenas rebase el voltaje de operación aunque lleva una gran cantidad de ruido.
(file energización.pl4; x-var t) v:RECA v:RECB v:RECC 32 36 40 44 48 52 56[ms]
-300
-200
-100
0
100
200
300
400
[kV]
Figura 26: Tensiones por fase en el extremo de recibo.
Finalmente se despliegan en la figura 27 las corrientes que circulan por la línea. Nótese la intensidad de la fase A, la cual llega a 400 A, aunque estas tensiones pueden ser soportadas por el sistema se debe tomar en consideración que en este momento la línea no está bajo carga y si estas corrientes se dieran con una carga acoplada podrían ser destructivas al equipo del sistema.
(file energización.pl4; x-var t) c:X0019A-SENA c:X0019B-SENB c:X0019C-SENC 30 35 40 45 50 55 60 65 70[ms]
-400
-250
-100
50
200
350
500
[A]
Figura 27: Corrientes por fase en la línea.
Transitorios por falla de línea a tierra
Las fallas de línea a tierra o SLG constituyen la mayor proporción de fallas a las que están expuestos los sistemas de transmisión aérea, por lo tanto la compresión del comportamiento de estas fallas es fundamental. En esta simulación se toma en cuenta la conexión de la barra de Esperanza, de esta manera debemos obtener el equivalente de Thevenin de la red desde los dos extremos agregando una fuente de tensión de la misma manera que en la sección anterior y calculando la impedancia equivalente de Thevenin que es de 40Ω .
Además se toma en cuenta la impedancia característica, es decir, de la línea de acuerdo a lo consultado en [4, 5, 23], está se muestra como un elemento RLC en paralelo con la impedancia equivalente de RED. La falla a tierra se simula por medio de un interruptor y una resistencia a tierra de que se puede observar en la figura
correspondiente al archivo de ATP/EMTP generado para esta simulación, archivo SLG.adp en la figura 28.
CZ
5Ω
De la misma manera que en la sección anterior se utilizaron interruptores de potencia, solo que esta vez interrumpen simultáneamente el flujo de corriente en las tres fases 1 ciclo después de la falla.

Luigi Vanfretti [email protected]
25
Arc_RES
XX0005
X0001
X0009U U
X0001
EXTREMO DE ENVÍO EXTREMO DE RECIBO
LUIGI [email protected]
Figura 28: Archivo SLG.adp
En la figura 15 se muestran las corrientes de todas las fases debidas a la falla en la fase A. Observe que la máxima corriente esperada será de 3200 A, este dato coincide exactamente con el dato que el Ing. J. Bedoya2 amablemente indico para el objeto de la simulación; correspondiente a la corriente máxima debida a corto circuito.
Finalmente en las figuras 30 y 31 podemos observar el comportamiento de la tensión en la fase bajo falla a tierra en el extremo de recibo y envío respectivamente. Nótese la característica transitoria al inicio de la interrupción del interruptor de potencia en el lado de recibo.
(file fallaatierra.pl4; x-var t) c:X0009B-X0018B c:X0009C-X0018C c:X0009A-X0018A 0.00 0.02 0.04 0.06 0.08 0.10 0.12[s]
-3000
-2000
-1000
0
1000
2000
3000
4000
[A]
Figura 29: corrientes pre‐falla, durante‐falla y post‐falla en la línea.
2 Jefe del Área de Subestaciones, Subestación Guatemala‐Sur, INDE.
(file fallaatierra.pl4; x-var t) v:X0009A 0.00 0.05 0.10 0.15 0.20 0.25 0.30[s]
-200
-150
-100
-50
0
50
100
150
200
[kV]
Figura 30: tensión en la fase bajo falla en el extremo de recibo.
(file fallaatierra.pl4; x-var t) v:X0001A 0.00 0.05 0.10 0.15 0.20 0.25 0.30[s]
-200
-150
-100
-50
0
50
100
150
200
[kV]
Figura 31: tensión en la fase bajo falla en el extremo de envío.

Luigi Vanfretti [email protected] 26
8.2 Análisis con: MATLAB/SIMULINK y la SIMPOWERSYSTEMS Toolbox
MATLAB, Simulink y la Simpowersystems Toolbox, son herramientas sumamente útiles en el área de la ingeniería eléctrica; especialmente para el modelado de sistemas eléctricos. Además de las cualidades de programación y modelado por las que Matlab y Simulk son conocidos se suman las opciones que provee la Simpowersystems Toolbox. La versión 3.1 de la Simpowersystems Toolbox, contiene una rutina capaz de calcular los parámetros de líneas de transmisión, esta opción es totalmente nueva para esta versión.
En esta sección se estudiarán los fenómenos transitorios por acción de una falla trifásica en la línea de transmisión Brillantes‐Esperanza. Los modelos de línea disponibles enla Simpowersystems Toolbox son el modelo PI y el modelo de parámetros distribuidos. Para simular la línea de transmisión se seleccionó el modelo de parámetros distribuidos, que según [17], es un modelo de parámetros distribuidos con las resistencias agrupadas, es decir, el modelo Bergeron; también se simuló el modelo PI con el fin de mostrar la diferencia de la respuesta en frecuencia de ambos modelos. Los parámetros para cada modelo fueron obtenidos de las dimensiones geométricas de la línea, en realidad se obtuvieron dos secciones de la línea ya que contiene un 30% de estructuras de remate con la configuración de la figura 22 y un 70% de estructuras tipo suspensión como en la figura 23. La rutina power_lineparam computa las matrices de parámetros distribuidos y de secuencia para la línea y automáticamente los asigna al bloque deseado con el cuál se simulará la línea.
El modelo de simulación de la red se presenta en la figura 24 , en general sigue la misma filosofía de simulación que en la sección anterior. Una ventaja que tiene la Simpowersystems Toolbox ante otros programas es que cuenta con un bloque de modelación de fuentes donde la fuente se modela a través de la potencia de corto circuito en el punto. Además cuenta con un bloque de fallas, el cual permite crear una falle en cualquiera de las fases del sistema. Esto significa que el sistema se puede
modelar con dos fuentes equivalentes en cada uno de los extremos de la línea, dos bloques de línea con parámetros distribuidos, bloques de medición, el bloque de fallas y bloques para el manejo de las señales en cuanto a graficación y visualización. El modelo resultante se presenta en la figura 32, el cual es el archivo de Simulink, creado para la simulación.
Figura 32: Modelo de Simulik para la simulación de una falla trifásica utilizando el modelo
Bergeron.
La figura 33 muestra la ventana de la rutina power_lineparam, esta rutina se utiliza para computar los parámetros RLC de la línea de transmisión, los cuales, son asignados automáticamente a los bloques para los cuales son generados mediante un botón de selección que provee el GUI destinado para lo anterior.

Luigi Vanfretti [email protected]
27
Figura 33: Ventana de la rutina power_lineparam
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16-2
-1.5
-1
-0.5
0
0.5
1
1.5
2FALLA TRIFÁSICA EN LA LÍNEA BRILLANTES ESPERANZA
Tiempo, s
Vol
taje
, pu
Va
VbVc
Figura 34: Tensiones de la simulación del archivo fallas.mdl
Las figuras 34 y 35 muestran las gráficas de tensión y corriente para las tres fases de la línea de transmisión en valores por unidad. Como se puede observar los valores de tensión en la figura 34 alcanzan 1.5 pu y los valores de corriente en la figura 35 alcanzan más de 9 p.u.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16-10
-8
-6
-4
-2
0
2
4
6
8
10FALLA TRIFÁSICA EN LA LÍNEA BRILLANTES ESPERANZA
Tiempo, s
Cor
rient
e, p
u
IaIbIc
Figura 35: Corrientes de la simulación del archivo fallas.mdl
Figura 36: Respuesta en frecuencia de los modelos de línea de transmisión Bergeron y Pi.

Luigi Vanfretti [email protected] 28
Los resultados de la simulación, que aparecen en las figuras 34 y 35, nos dan una clara idea de los valores máximos de sobre tensión que tendrá que soportar el sistema en caso de una falla trifásica; y es en este caso donde la simulación se vuelve realmente útil.
En la figura 36 se puede observar la respuesta en frecuencia del sistema, la línea azul representa al la línea modelada con el modelo Bergeron y la línea verde representa a el modelo PI. La respuesta en frecuencia es fácil de obtener a través del powergui que provee la Simpowersystems Toolbox, a través de esta se analizan ambos modelos y se obtienen las gráficas por medio de la opción Impedance Vrs. Frecuency Mesurement. Como se puede observar, para frecuencias mayores a 1kHZ el modelo PI tiene una gran desviación en su magnitud respecto al modelo Bergeron; por consiguiente se puede afirmar que el modelo Bergeron representará con mayor fidelidad a la línea cuando se estudien casos de alta frecuencia, es decir, transitorios electromagnéticos como los descritos en la tabla 1.
9 Conclusión.
En este documento y en la presentación se describieron las características fundamentales de los transitorios en sistemas de potencia, se dio una descripción del proceso de solución que aplican los principales de simulación sin tocar el método de root‐matching, luego se introdujeron los modelos de líneas de transmisión derivados de la teoría de ondas para luego presentar los modelos dependientes de frecuencia. Además se describió el proceso de cálculo de parámetros de líneas de transmisión que llevan a cabo los programas de simulación y finalmente se realizaron varias simulaciones de transitorios electromagnéticos debido a fallas y a operación en la línea de Brillantes‐Esperanza por medio de MATLAB® /SIMULINK® y el ATP/EMTP.
El documento describe los aspectos generales de transitorios electromagnéticos y su simulación para líneas de transmisión. La principal conclusión
que se puede obtener es que los modelos matemáticos, obras de arte físico‐matemáticas, serán tan detallados como complejo sea el fenómeno y el nivel de exactitud que se desea tener en su representación; el arte de la modelación no solo implica un gran alcance en el conocimiento de la física y la matemática, si no que requiere de conocimiento de métodos de simulación para poder observar la certeza de los modelos creados.
10 Reconocimientos Este documento fue realizado gracias al apoyo del Ing. Freddy Monroy y del departamento de líneas de transmisión del ETCEE de la subestación Guatemala‐Sur del INDE, en donde escribí este documento y la presentación de la conferencia como parte del trabajo de mi año de práctica profesional, un agradecimiento especial para todos.
11 Referencias 1. Arrillaga, J. y Watson, N. Power systems
electromagnetic transients simulation. Londres: The Institution of Electrical Engineers (IEE), 2003.
2. Van der Sluis, Lou. Transients in power systems. Inglaterra: John Wiley & Sons, 2001.
3. Dommel, H.W. Electromagnetic transients program (EMTP) theory book. E.E.U.U.: Bonneville Power Administration, 1987.
4. Kizilcay, Mustafa. Power system transients and their computation. Alemania: Universidad de ciencias aplicadas de Osnabrück, 2000.
5. Haginomori, Eiichi. Applied ATP‐EMTP to highly‐sophisticated electric power systems. Japón: Can/Am ATP/EMTP User’s Group, 2003.
6. Tavares, M.C., Pissolato, H. Y Portela, C.M. “Guidelines for transmisión line modeling”. IEEE 1999. E.E.U.U.: 786‐791. Identificador digital: 0‐7803‐5569‐5.
7. Dommel, H.W., Nguyen H.V. y Martí J.R. “Direct phase‐domain modelling of frequency‐dependent overhead transmisión lines”. IEEE Transactions on Power Delivery. E.E.U.U., Vol. 12, No.3: 1335‐1342. Julio 1997.
8. Dommel, H.W., Nguyen H.V. y Martí J.R. “Modelling of single‐phse nonuniform transmission lines in

Luigi Vanfretti [email protected]
29
electromagnetic transient simulations”. IEEE Transactions on Power Delivery. E.E.U.U., Vol. 12, No.2: 916‐921. Abril 1997.
9. Dommel, H.W., Pwerkins, B.K. y Martí J.R. “Nonlinear elements in the EMTP: steady‐state initialization”. IEEE Transactions on Power Systems. E.E.U.U., Vol. 10, No.2: 593‐601. Mayo 1995.
10. Schmitt, H. y Winter, W. “Simulation of lightning overvoltages in electrical power systems”. Proceedings of the 2001 International Conference on Power Systems Transients. Río de Janeiro, Brazil: 2001.
11. Fernandes, Alécio y otros. “The effect of the shunt conductance on transmission line models”. Proceedings of the 2001 International Conference on Power Systems Transients. Río de Janeiro, Brazil: 2001.
12. Dommel, H.W., Martí J.R., Barros, H.M. y Carneiro, S. “An efficient procedure for the implementation of corona models in electromagnetic transients programs”. IEEE Transactions on Power Delivery. E.E.U.U., Vol. 9, No.2: 849‐855. Abril 1994.
13. Manitoba HVDC Research Centre. Introduction to PSCAD® / EMTDC™. Canadá: Manitoba HVDC Research Centre, 2003.
14. Manitoba HVDC Research Centre. EMTDC. Canadá: Manitoba HVDC Research Centre, 2003.
15. The Mathworks Inc. Using Simulink®. E.E.U.U.: The MathWorks, 2002.
16. MicroTran Power System Analysis Corporation. mtLineTM & fdDataTM Reference Manual. Canadá: MicroTran Power System Analysis Corporation, 1992.
17. TransÉnergie Technologies Inc. SimPowerSystems user’s guide. E.E.U.U.: The Mathworks Inc., 2002.
18. Chapman, S. MATLAB® programming for engineers. 2 ed. E.E.U.U.: Thomson ‐ Brooks/Cole, 2003.
19. Brandão, José. “A new generalized modal analysis theory for nonuniform multiconductor transmission lines”. IEEE Transactions on Power Systems. E.E.U.U., Vol. 19, No.2: 926‐933. Mayo, 2004.
20. Brandão, José. “A new modal analysis theory for multiconductor nonuniform transmission line structures: application to the analysis of line junctions”. IEEE Transactions on Power Systems. E.E.U.U., Vol. 19, No.3: 1380‐1386. Agosto, 2004.
21. Vanfretti, Luigi. Reporte: “Estudio de la Línea de Transmisión: Brillantes‐Esperanza”. Escuela Mecánica‐Eléctrica, Facultad de Ingeniería, USAC. Guatemala, Abril de 2004.
22. Vanfretti, Luigi. Reporte: “Coordinación de aislamiento y simulación de transitorios en la línea de transmisión Brillantes‐Esperanza”. Escuela Mecánica‐Eléctrica, Facultad de Ingeniería, USAC. Guatemala, Mayo de 2004.
23. Prikler, László y Hoidalen, Hans. ATPDRAW 3.5 User’s Manual. SINTEF Energy Research Ltd. Preliminary Release No.10. Noruega: Agosto, 2002.
©Luigi Vanfretti. [email protected] presentado en el XXIII Congreso de
Estudiantes de Centroamérica y Panamá (CONESCAPAN XXIII) de la IEEE Sección 9, realizado del 22 al 25 de Septiembre de 2004 en la ciudad de
Guatemala, Guatemala.