Física de la visión (Teoría y Prácticas)
314
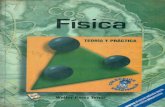
Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica Física de la Visión Jaime Martínez Verdú 1 1.1. Principios y leyes fundamentales de la óptica geométrica. 1.1.1. Introducción. Óptica, rama de la física que se ocupa de la propagación y el comportamiento de la luz. En un sentido amplio, la luz es la zona del espectro de radiación electromagnética que se extiende desde los rayos X hasta las microondas, e incluye la energía radiante que produce la sensación de visión. El estudio de la óptica se divide en dos ramas, la óptica geométrica y la óptica física. Puesto que existen dos formas de explicar la procedencia de la naturaleza de la luz, nosotros emplearemos la definición de luz como onda electromagnética para conceptos que aparecerán durante este tema que se centra en la franja de ondas visibles comprendidas entre las ondas de rayos Ultravioletas hasta las de Infrarrojos. Figura 1.1. Diagrama del espectro electromagnético en escala logarítmica. ¿Por qué la franja visible únicamente? Nosotros estudiaremos esta parte de la óptica puesto que en la mayoría de eventos y fenómenos que ocurren en la naturaleza se desprende luz en forma de onda cuya longitud está incluida dentro de esta franja. Además, nuestros propios ojos solamente perciben los sucesos que desprenden luz visible (¿te imaginas que nuestros ojos fueran sensibles sólo a los Rayos X o a las ondas de radio?, no veríamos absolutamente nada pues los rayos X escasean en la naturaleza o nuestra vida sería como una discoteca con luces de colores). También estudiamos esta franja de ondas por su importancia práctica. ¿Qué condiciones han de verificarse para poder aplicar la teoría de la Óptica Geométrica? El requisito principal que han de cumplir los objetos que estudiamos es que todos ellos emitan luminosidad de longitud de onda mayor a la de la onda electromagnética que empleemos para analizar el objeto. Utilizando la Óptica Geométrica podremos explicar muchos conceptos tales como el de reflexión pero, existirán conceptos que no podrán ser explicados mediante esa teoría. Para explicar estos otros, como por ejemplo el de difracción, tendremos que recurrir a la teoría de la Óptica Ondulatoria. Violeta Azul Azul-verdoso Verde Amarillo-verdoso Amarillo Anaranjado Rojo IR UV 400 500 600 700 1 10 10 2 10 3 10 4 10 5 10 6 Luz visible Infrarrojos (IR) Rayos X Ultravioleta UV Longitudes de onda corta Longitudes de onda larga
-
Upload
jaime-martinez-verdu -
Category
Education
-
view
1.394 -
download
7
description
Este documento representa los apuntes de la asignatura de Física de la Visión de 3º de Ing. Industrial de la UMH. En esta asignatura inicia al alumno en los fundamentos teóricos y los aspectos prácticos de la visión artificial aplicada al ámbito industrial. La asignatura se centra en dar a conocer al alumno las primeras etapas de los procesos de visión artificial para ampliar éstos en posteriores asignaturas. Primeramente se estudia los aspectos físicos de la luz y posteriormente la anatomía del ojo humano. Posteriormente se divide el bloque en dos grandes grupos: la iluminación y la visión artificial. Los temas tratados son: - Óptica geométrica - Anatomía del ojo humano - iluminación - Colorimetría - Sistemas de adquisición de imágenes - Tratamiento de imágenes - Procesado básico de imágenes - Transformación de imágenes - Detección de bordes De manera adicional, este documento también incluye las prácticas de la asignatura (la práctica 1 de iluminación fue un trabajo conjunto mío y de M. Nieves Robles Botella).
Transcript of Física de la visión (Teoría y Prácticas)

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
1
1.1. Principios y leyes fundamentales de la óptica geométrica. 1.1.1. Introducción.
Óptica, rama de la física que se ocupa de la propagación y el comportamiento de la luz. En un sentido amplio, la luz es la zona del espectro de radiación electromagnética que se extiende desde los rayos X hasta las microondas, e incluye la energía radiante que produce la sensación de visión. El estudio de la óptica se divide en dos ramas, la óptica geométrica y la óptica física.
Puesto que existen dos formas de explicar la procedencia de la naturaleza de la luz, nosotros emplearemos la definición de luz como onda electromagnética para conceptos que aparecerán durante este tema que se centra en la franja de ondas visibles comprendidas entre las ondas de rayos Ultravioletas hasta las de Infrarrojos.
Figura 1.1. Diagrama del espectro electromagnético en escala logarítmica.
¿Por qué la franja visible únicamente? Nosotros estudiaremos esta parte de la
óptica puesto que en la mayoría de eventos y fenómenos que ocurren en la naturaleza se desprende luz en forma de onda cuya longitud está incluida dentro de esta franja. Además, nuestros propios ojos solamente perciben los sucesos que desprenden luz visible (¿te imaginas que nuestros ojos fueran sensibles sólo a los Rayos X o a las ondas de radio?, no veríamos absolutamente nada pues los rayos X escasean en la naturaleza o nuestra vida sería como una discoteca con luces de colores). También estudiamos esta franja de ondas por su importancia práctica. ¿Qué condiciones han de verificarse para poder aplicar la teoría de la Óptica Geométrica? El requisito principal que han de cumplir los objetos que estudiamos es que todos ellos emitan luminosidad de longitud de onda mayor a la de la onda electromagnética que empleemos para analizar el objeto. Utilizando la Óptica Geométrica podremos explicar muchos conceptos tales como el de reflexión pero, existirán conceptos que no podrán ser explicados mediante esa teoría. Para explicar estos otros, como por ejemplo el de difracción, tendremos que recurrir a la teoría de la Óptica Ondulatoria.
Vio
leta
Azu
l
Azu
l-ver
doso
Ver
de
Am
arill
o-ve
rdos
o
Am
arill
o
Ana
ranj
ado
Roj
o
IR UV
400 500 600 700
1 10 102 103 104 105 106
Luz visible
Infrarrojos (IR) Rayos X Ultravioleta UV
Lon
gitu
des
de o
nda
cort
a
Lon
gitu
des
de o
nda
larg
a

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
2
Tal y como se puede apreciar en la figura, con la Óptica Ondulatoria se puede explicar cualquier concepto de la Óptica Geométrica pero al revés no siempre se cumple. Análogamente, con la Óptica Electromagnética explica cualquier concepto y la Óptica Ondulatoria no puede explicarlos todos.
1.1.2. Postulados.
1. La luz se propaga en forma de rayo. Las características principales del rayo va a ser su dirección y sentido.
2. Un medio óptico se caracteriza por una cantidad n ≥ 1, denominada índice de
refracción definido como el conciente entre la velocidad c de la luz en el vacío y la velocidad v de la luz en el medio, es decir:
v
cn =
3. Principio de Fermat,
Fermat asigna a la luz un comportamiento reflexivo − como el de los seres humanos − que le permite trazar un camino entre dos puntos siempre que lo va a emprender. Este principio afirma lo siguiente:
“El camino que, entre todos los posibles, sigue un
rayo de luz para ir de un punto a otro, es aquel en que la luz emplea un tiempo mínimo.“ Feynman explica así el Principio de Fermat.
"Imagina que nos encontramos en la costa, lejos de la orilla, en un punto A y en el mar, alejado de la orilla, una persona cae de una barca en un punto B. Nosotros vemos el accidente y podemos acudir corriendo y luego nadando. ¿Qué hacemos? ¿Vamos en línea recta? ¡Sí, sin duda!.....Sin embargo, si usáramos un poco más la inteligencia nos daríamos cuenta que es ventajoso correr una distancia un poco mayor por tierra para disminuir la distancia que debemos nadar, porque nos movemos más lentamente por el mar que por la tierra. Es preferible recorrer un mayor camino para tardar el menor tiempo ya que ésta es la magnitud que interesa para salvar a la persona de morir ahogada. Pues bien, esto es lo que hace la luz para ir de A hacia B cuando cambia de medio de propagación".
Como hemos dicho en repetidas ocasiones, la velocidad de propagación de las
ondas electromagnéticas y por lo tanto de la luz es c = 3·108 m/s en el vacío; observaciones experimentales realizadas a partir de los inicios del siglo XIX (Fizean, Foucault,...) y medidas posteriores han demostrado que en diferentes medios de propagación (agua, vidrio, plástico,...) la luz tiene diferentes velocidades menores que c.
Figura 1.2. Partes de la óptica.
Figura 1.3. Explicación de Feynman del Principio de Fermat
B
A
( ) ( )10== ∫ dsrnLB
A
rσδ

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
3
Podemos entonces definir un número n que llamaremos índice de refracción del medio de propagación de manera que si v es la velocidad de propagación de la luz en el medio, sea:
v
cn = (2)
Así, si tenemos diferentes medios en los cuales la luz se propaga con
velocidades v1, v2,…, vi podremos asociar a esos medios diferentes índices de refracción de modo que:
cvnvnvn nn ==== L2211 (3)
Consideremos ahora un haz de luz que se propaga en un medio de índice de
refracción n con velocidad ncv = ; después de un tiempo t habrá recorrido una distancia S dada por:
tvSAB ·== (4)
En el mismo tiempo t un haz de luz, en el vacío, recorrería una distancia
SSBA >= 000 dada por:
tcSBA ·000 == (5)
Teniendo en cuenta la relación (2):
SntvnSBA ···000 === (6)
A la distancia n·S = ∆ la denominamos camino óptico. El concepto de camino
óptico es obviamente útil para comparar trayectorias luminosas recorridas en distintos medios que, de otra manera, no serían comparables dado que en cada medio la luz se propaga con diferente velocidad; en cambio, los diferentes tramos de trayectoria pueden compararse a través de los caminos ópticos asociados, dado que éstos corresponden a trayectorias todas recorridas en el vacío. Así por ejemplo, si un haz de luz recorre tramos de trayectoria de longitudes S1, S2, S3,… Si e en medios de índices de refracción n1, n2, n3,…, ni respectivamente.
Figura 1.4. Trayectoria de un haz de luz de tramos S1, S2, S3,…, Si en medios de índices
de refracción n1, n2, n3,…, ni.
La longitud total de la trayectoria será:
∑=+++=i ii SSSSL L21 (7)

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
4
Pero el camino óptico total estará dado por:
∑=+++=∆i iiii SnSnSnSn L2211 (8)
El camino óptico ∆ corresponde a la longitud de la trayectoria que la luz
recorrería, en el vacío, en el mismo tiempo que emplea para recorrer la trayectoria de longitud L en los medios de índices de refracción n1, n2, n3,…, ni.
Volvamos ahora a considerar un haz de luz que se propaga desde A hasta B
atravesando varios medios de diferentes índices de refracción; es evidente que es posible imaginar muchas o más bien infinitas trayectorias que unen los puntos A y B; el principio de Fermat nos permite establecer cuál de todas las trayectorias imaginables es la que efectivamente recorre el haz de luz. El principio de Fermat afirma que:
La trayectoria real de un haz de luz es la que se asocia al camino óptico máximo, mínimo o estacionario.
Con relación al caso ilustrado en la figura anterior este principio nos dice que de todas las trayectorias que pueden trazarse entre los puntos A y B la que realmente recorre la perturbación luminosa es la que cumple con la relación:
0==∆ ∑i iiSnDD (9)
1.1.3. Tipos de materiales. Existen tres grandes grupos de tipos de materiales según su índice de refracción: Medios Homogéneos e Isótropos: En éstos, el índice de refracción permanece uniforme en la totalidad de su extensión. Medios Heterogéneos: En los cuales el índice de refracción puede variar en cada punto (no es constante en la totalidad del medio). Medios Anisótropos: En este tipo de medios, el índice de refracción dependerá del ángulo de incidencia del rayo. 1.1.4. Leyes de la Óptica Geométrica.
1. Las trayectorias de los rayos son reversibles. Si un rayo que va de A a B sigue el camino óptico ∆, entonces para ir de B a A seguirá el mismo camino pero en sentido contrario.
A
B
Figura 1.5. Caminos reversibles.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
5
2. Reflexión. Consideremos un haz de luz que viaja desde el punto A hasta el B reflejándose sobre un espejo plano tal y como se muestra en la figura:
Figura 1.6. APB es una posible trayectoria para el haz de luz que de A a B.
Si n es el índice de refracción asociado al medio, el camino que recorre el haz de luz y el camino óptico asociado tienen un valor de:
( )( )22
222
1
222
221
····· xlhnxhnPBnAPnLn
xlhxhPBAPL
−+++=+==∆
−+++=+=
Dado que la trayectoria de la luz depende de la posición del punto P o sea del
valor de x, podemos encontrar la trayectoria real aplicando el principio de Fermat, es decir imponiendo la condición (9):
( ) ( )( )
( )( )
( ) ( ) 2121222
221
222
221
222
221 0
2
2·
2
2···
0
θθθθ =⇒=⇒−+
−=+
=−+
−−++
=
−+++=∆
==∆ ∑
sensenxlh
xl
xh
x
xlh
xln
xh
xnxlhnxhn
dx
d
dx
d
SnDDi ii
Lo anterior implica entonces que la trayectoria real del haz de luz es la que se
asocia a la condición (principio de Fermat) y que ésta se satisface para
21 θθ = en valor absoluto (ley de reflexión).
Existen dos tipos de reflexión:
Reflexión Especular. Tiene lugar cuando los rayos de luz inciden sobre una superficie lisa. Algunos metales como la plata y el aluminio absorben poco la luz blanca y si construimos con ellos láminas metálicas muy pulimentadas podemos lograr que reflejen la luz de tal manera que los rayos reflejados se vean con una intensidad comparable a la de los rayos incidentes.
1h2h
1θ
2θ1θ
2θ
A
B
P
M
N x
l
0=∆dx
d

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
6
Reflexión difusa. Todos los cuerpos reflejan parte de la luz que incide sobre ellos pero la mayoría producen una reflexión difusa. La reflexión difusa se origina en los cuerpos que tienen superficies rugosas, no pulidas: esto es lo que nos permite ver los objetos que nos rodean sin deslumbrarnos aunque que estén iluminados por una luz intensa.
3. Refracción.
Consideremos, por ejemplo, el caso de un haz de luz que se propaga desde el punto A situado en un medio de índice de refracción n1 hacia un punto B situado en un medio de índice de refracción n2; en este caso también podemos imaginar infinitas trayectorias las cuales difieren por la posición del punto P sobre la interfase donde incide la luz (Figura 8).
Figura 1.8. APB es una posible trayectoria para el haz de luz que de A a B.
Si n1 y n2 son los índices de refracción de cada medio, el camino que recorre el haz de luz y el camino óptico asociado tienen un valor de:
( )( ) 2
22
222
1121
22
2221
····· hxlnxhnPBnAPnLn
hxlxhPBAPL
+−++=+==∆
+−++=+=
Dado que la trayectoria de la luz depende de la posición del punto P o sea del
valor de x, podemos encontrar la trayectoria real aplicando el principio de Fermat, es decir imponiendo la condición (9):
( ) ( )( )
( )( )
( ) ( ) SnelldeLey sennsennxlh
xln
xh
xn
hxl
xln
xh
xnhxlnxhn
dx
d
dx
d
SnDDi ii
2211222
2221
1
22
22221
122
22
2211
····
02
2·
2
2···
0
θθ =⇒−+
−=+
=+−
−−++
=
+−++=∆
==∆ ∑
1h
2h
1θ
2θ
1θ
2θ
A
B
P
M
N
x
l
Figura 1.7. Reflexión difusa.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
7
- Refracción EXTERNA 21 nn < y 21 θθ > . Refracción en Superficies planas - Refracción INTERNA 21 nn > y 21 θθ < .
Reflexión total. Consideremos dos medios de índices de refracción n1 y n2 (con n2 > n1), y supongamos que una fuente de luz esté localizada en el medio de mayor índice de refracción; nos proponemos analizar qué ocurre cuando la luz incide sobre la interfase entre los dos medios. De acuerdo con la ley de Snell, ( ) ( )2211 ·· θθ sennsenn = y dada la condición n2 > n1, el ángulo de refracción 1θ resulta siempre mayor que el ángulo de incidencia 2θ ; esto implica que existe un lim,2θ para el ángulo de incidencia para el cual 21 πθ = o sea para el cual el rayo refractado es paralelo a la interfase.
Figura 1.9. Reflexión total. Los rayos que inciden en la interfase con los ángulos
mayores que lim,2θ se reflejan en el medio.
Es obvio que el valor del ángulo límite para la reflexión interna total puede
calcularse fácilmente con la condición que si lim,22 θθ = entonces 21 πθ = ; esta condición reemplazada en la ley de Snell para la interfase considerada nos da:
( )
( ) ( ) ( ) ( )
=
=⇒=⇒=
=
=⇒=
2
1,2
,22
1,2212211
11
·1···
122
n
nArcsen
senn
nsennnsennsenn
sensen Si
lim
limlim
θ
θθθθ
πθπθ
Puesto que los rayos se alejan de la normal cuando entran en un medio menos
denso, y la desviación de la normal aumenta a medida que aumenta el ángulo de incidencia hasta que se llega al ángulo crítico, para el que el rayo refractado forma un ángulo de 90º con la normal, por lo que avanza justo a lo largo de la superficie de separación entre ambos medios. Si el ángulo de incidencia se hace mayor que el ángulo crítico, los rayos de luz serán totalmente reflejados. La reflexión total no puede producirse cuando la luz pasa de un medio menos denso a otro más denso.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
8
1.1.5. Convenio de signos.
I. Para el cálculo de distancias a lo largo del eje z se tomará como sentido positivo lo que quede a la derecha, a no ser que se diga lo contrario.
II. El radio de curvatura del espejo que tengamos es positivo si el centro de curvatura está a su derecha. Obviamente, si el radio de curvatura esta a la izquierda del espejo.
III. Los segmentos normales al eje z serán positivos hacia arriba y negativos si son dirigidos hacia abajo.
IV. Los ángulos que se tomen respecto a una normal serán positivos si (uniendo de
rayo a la normal) tienen sentido horario o, por lo contrario, negativos si tiene sentido antihorario.
V. Los ángulos que se tomen respecto al eje z serán positivos si (uniendo de rayo a la normal) tienen sentido antihorario o, por lo contrario, negativos si tiene sentido horario.
0θ
1θ 2θ
3θ
NORMAL N
EJE Z
A F C
yA F C
y
A C F
R
A F C
R
H y sentido Za Respecto
AH y sentido N a Respecto
H y sentido N a Respecto
AH y sentido Za Respecto
0
0
0
0
3
2
1
0
<<>>
θθθθ
Figura 1.10. Criterio de signos angular.
Figura 5. R < 0 Figura 6. R > 0
Figura 7. y < 0 Figura 8. y > 0

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
9
1.2. Espejos. Siempre que se observa un objeto por medio de un aparato de óptica, sencillo como un espejo plano, o complicado como un telescopio, lo que se ve no es el objeto sino su imagen con respecto a dicho aparato de óptica, imagen que puede ser del mismo tamaño que el objeto, más grande, pequeña, derecha, invertida y real o virtual. Las imágenes se forman porque, cuando los rayos de luz que provienen de un objeto luminoso o iluminado llegan a un aparato de óptica, lo único que les sucede es que cambian de dirección. 1.2.1. Espejo plano. Por convenio, una imagen será real cuando los rayos reflejados tocan la imagen producida por el objeto y será una imagen virtual cuando no lo toque. Por ejemplo, cuando un individuo se coloca frente a un espejo plano, de todos sus puntos salen rayos de luz que llegan al espejo, cambian de dirección y se reflejan en direcciones divergentes por lo que no se cruzan, pero sus prolongaciones sí lo hacen precisamente donde se forma su imagen, la cual se encuentra detrás del espejo, y no se puede recibir en una pantalla, característica que distingue, como ya indicamos, a las imágenes virtuales.
A pesar de usar la palabra “virtual”, se sabe, por la experiencia cotidiana, qué tan “real” puede parecer una imagen virtual y qué tan definida es su localización en el espacio que se encuentra por detrás del espejo, aunque este espacio pueda, de hecho, estar ocupado por una pared de ladrillos. Las imágenes en un espejo plano defieren de los objetos en el hecho de que la izquierda se intercambia por la derecha. Así por ejemplo, si se hace girar un trompo en el mismo sentido de rotación de las manecillas de un reloj, su imagen vista a través de un espejo vertical plano, girará en contra de las manecillas del reloj.
Las leyes de la reflexión afirman que el ángulo de incidencia es igual al ángulo de reflexión, y que el rayo incidente, el rayo reflejado y la normal en el punto de incidencia se encuentran en un mismo plano. Si la superficie del segundo medio es lisa, puede actuar como un espejo y producir una imagen reflejada como se observa en la figura anterior. Un punto de A emite rayos en todas las direcciones. Los dos rayos que inciden sobre el espejo en B y C, por ejemplo, se reflejan como rayos BD y CE. Para un observador situado delante del espejo, esos rayos parecen venir del punto F que está detrás del espejo. De las leyes de reflexión se deduce que CF y BF forman el mismo ángulo con la superficie del espejo que AC y AB. En este caso, en el que el espejo es plano, la imagen del objeto parece situada detrás del espejo y separada de él por la misma distancia que hay entre éste y el objeto que está delante.
Espejo
A Fuente de luz
F Imagen
B
C D
E
Figura 1.11. Imagen de un objeto en un espejo plano.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
10
1.2.2. Espejo parabólico. En este espejo, todas las proyecciones de los rayos reflejados van a ir a parar a un mismo punto, conocido como foco. Generalmente, este tipo de espejos son muy empleados en telescopios ya que poseen la ventaja de eliminar la aberración esférica (defecto que se produce en la imagen formada por un espejo esférico por el cual los rayos de luz no convergen a un punto único, sino a una serie de puntos, cuyas distancias al espejo son menores para los rayos de luz más próximos a la periferia del espejo).
Generalmente suele utilizarse la aproximación paraxial en un espejo esférico
para conseguir que el comportamiento del mismo sea lo más cercano al que posee un espejo parabólico.
Figura 1.12. Imagen de un haz de luces en un espejo parabólico.
Otro uso muy común para los espejos con forma parabólica es el de componente básico para las antenas parabólicas. De este modo, los rayos de ondas electromagnéticas provenientes del infinito, por así decirlo, pueden concentrarse en el foco de la parábola. 1.12.1. Espejo elíptico. Este tipo de espejos se caracteriza principalmente porque los rayos de luz no se focalizan en el foco de donde proviene sino que los rayos provenientes de un foco se concentran en el otro foco restante.
Figura 1.13. Imagen de un haz de luz en un espejo elíptico.
1.12.2. Espejo esférico. Entre los espejos que no son planos, los más importantes son los esféricos, es decir, aquellos cuya forma corresponde a un casquete esférico. Los espejos esféricos pueden ser de dos clases: cóncavos, que reflejan la luz por dentro, y los convexos, que son los que lo hacen por fuera. Para poder estudiar los fenómenos ópticos que se presentan en los espejos esféricos, se necesita considerar las características que se indicarán en seguida.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
11
En un espejo esférico podemos definir las siguientes partes: Vértice: Es el centro A del espejo. Centro de curvatura: Es el centro de la esfera de la que es parte el espejo considerado. La distancia entre el vértice A y el centro de curvatura es R. Eje principal o eje del espejo: Es la recta CA que pasa por el centro de curvatura y el vértice. Foco F: Es el punto que se encuentra a la mitad de la distancia entre el centro de curvatura y el vértice. Se define como el punto imagen cuando sobre un espejo incide luz paralela a su eje (objeto muy distante). La distancia entre el punto focal F y el vértice A se denomina distancia focal f. Aumento lateral: La relación entre la altura de la imagen y la altura del objeto se denomina aumento lateral.
Figura 1.14. Partes de un espejo esférico.
Podemos encontrar gráficamente la imagen de cualquier punto fuera del eje, utilizando los siguientes procedimientos:
• Un rayo que incide en el espejo después de haber pasado (o su prolongación) a través del centro de curvatura C , regresa a través de su mismo camino. Esto se debe a que tal rayo es perpendicular al espejo y por la ley de la reflexión si el ángulo de incidencia es 90º, el de reflexión también será 90º.
• Un rayo que incide en el espejo paralelo a su eje, pasa (o su prolongación) a través del punto focal F.
• Un rayo que incide en el espejo después de pasar (el rayo o su prolongación) a través del punto focal, emerge paralelo al eje.
Antes de poder analizar los fenómenos que se producen cuando se coloca un objeto
delante de un espejo, hemos de conocer las siguientes fórmulas básicas:
A F C
f
R

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
12
⇒
−==
=+
−=
lateralAumento
vérticealimagenladeanciaDists
vérticealobjetodelanciaDists
imagenladeAlturay
objetodelAlturay
s
s
y
y
fss
f
n
f
f
f
f
f
'
'
'
'''
1
'
11
'
ββ
σσ
Trazado de rayos.
Si observamos con detenimiento la primera y última figura podemos observar que a medida que nos alejamos del espejo, la imagen disminuye su tamaño.
A F C
's s
'y
y
Figura 22. Imagen virtual
A F C
'ss
'yy
Figura 21. Imagen virtual
A F C
's
s
'y
y
Figura 20. Imagen real
A F C
's
s
'y
y
Figura 19. Imagen real

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
13

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
14
1.3. Superficies Refractoras Esféricas.

Tema 1 – Óptica Geométrica BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
15
1.4. Lentes.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
1
OPTICA GEOMÉTRICA SUPERFICIES REFRACTORAS Y LENTES
1 SUPERFICIES REFRACTORAS ESFERICAS
Es sabido que prácticamente todos los instrumentos ópticos utilizan lentes y que las lentes tienen
superficies esféricas o planas que pueden fabricarse, por métodos mecánicos, a un costo
razonable; es importante entonces analizar que ocurre a un haz de luz que atraviesa una superficie
refractora esférica que normalmente es una de las superficies de las lentes.
Se llama superficie refractora esférica (S.R.E.) a una porción de superficie esférica que separa
dos medios de diferentes índices de refracción.
Si suponemos que la luz viaja de izquierda a derecha las superficies refractoras pueden
clasificarse de acuerdo con la concavidad con respecto a la luz incidente en cóncavas y convexas
tal como se muestra en la Figura 1.
CV
a)
n2n1LuzC V
b)
n2n1Luz
Figura 1. Superficies refractoras esféricas: a) convexa, b) cóncava.
La Figura también nos muestra que el centro de curvatura de la superficie se encuentra a la
derecha o a la izquierda según la superficie sea convexa o cóncava..

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
2
A la recta que pasa por el centro de curvatura de la S.R.E. y por su centro geométrico o vértice se
le llama eje óptico; las propiedades de convergencia de las S.R.E. dependen de su concavidad con respecto a la luz incidente y de los índices de refracción de los dos medios. Si n n2 1> (de aquí
en adelante consideraremos únicamente este caso) las superficies refractoras convexas son
convergentes, en el sentido que los rayos refractados convergen en algún punto produciendo una
imagen real del objeto fuente, mientras las superficies cóncavas son divergentes, en el sentido
que los rayos refractados no se cruzan dando así lugar a una imagen virtual del objeto fuente( 1 ) .
OC
IV
P
n1 n2
N(a)
21θ θ
(a)
O
I CV
n1 n2
(b)
2
1
θθ
(b)
Nota: La línea roja es la prolongación del rayo
Figura 2 Propiedades de convergencia de las S.R.E. Si n n2 1> , la S.R.E. convexa es convergente (a), mientras la S.R.E. cóncava es divergente, (b).
( 1 ) Las propiedades de convergencia se invierten si n n2 1< como puede inmediatamente
comprobarse mediante la aplicación de la Ley de Snell.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
3
2. Propiedades focales.
Las S.R.E. tienen dos focos que pueden ser reales o virtuales según la superficie sea convexa o cóncava (para el caso n n2 1> ).
Para el caso de una superficie convexa, y por lo tanto convergente, los focos pueden definirse así:
Primer foco: Punto desde el cual divergen los rayos que, refractados por la superficie esférica, se
vuelven paralelos al eje óptico.
V CF1
n1 n2
Figura 3. Primer foco de una S.R.E. convexa .
o también: punto en el cual debe situarse el objeto fuente para que la imagen producida por la
S.R.E. esté localizada en el infinito.
Segundo foco: Punto en el cual convergen los rayos refractados por la S.R.E. cuando inciden
paralelos al eje óptico o también punto en el cual la S.R.E. forma la imagen de un objeto fuente
localizado en el infinito.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
4
V F2
n1 n2
C
Figura 4. Segundo foco de una S.R.E. convexa .
Para una superficie cóncava:
Primer foco: punto en el cual convergerían (si no hubiera S.R.E.) los rayos incidentes que
desviados por la S.R.E. se vuelven paralelos al eje óptico.
V F1
n1
n2
C
Nota: Las líneas naranja son prolongaciones de rayos
Figura 5. Primer foco de una S.R.E. cóncava.
Como puede deducirse de la figura se trata de un foco virtual dado que en el punto F1 no hay
concentración de energía; en este caso el primer foco se encuentra a la derecha de la S.R.E..
Segundo foco: punto desde el cual aparentemente divergen los rayos refractados que inciden
paralelos al eje óptico.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
5
VF2
N1 n2
C
Nota: Lsa líneas naranja son prolongaciones de rayos
Figura 6. Segundo foco de una S.R.E. cóncava.
F2 también es un foco virtual y está localizado a la izquierda de la superficie.
También se definen, para la S.R.E., los planos focales que son los planos perpendiculares al eje
óptico del sistema y que pasan por los focos.
Para las superficies convexas:
Primer plano focal (REAL)
Lugar geométrico de los puntos desde los cuales divergen los rayos que cuando inciden sobre la
superficie esférica se refractan paralelos entre sí
Segundo plano focal (REAL)
Lugar geométrico de los puntos en los cuales convergen los rayos refractados por la S.R.E.
cuando inciden paralelos entre sí.
Para las superficies cóncavas:
Primer plano focal (VIRTUAL)
Lugar geométrico de los puntos en los cuales convergerían los rayos incidentes (si no hubiera
S.R.E.) que refractados por la superficie esférica se vuelven paralelos entre sí.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
6
Segundo plano focal (VIRTUAL)
Lugar geométrico de los puntos desde los cuales aparentemente divergen los rayos refractados
producidos por rayos incidentes paralelos entre sí.
La siguiente figura ilustra gráficamente las anteriores definiciones.
VF1
Pf1
n1 n2
C
V F2
Pf2n1 n2
C
V F1
Pf1n1 n2
C
Nota: Lsa líneas naranja son prolongaciones de rayos

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
7
VF
Pf
n1 n2
C
Nota: Lsa líneas naranja son prolongaciones de rayos
Figura 7. Planos focales de S.R.E. convexa y cóncava.
3. Fórmula de Gauss para S.R.E.
Vamos ahora a obtener una relación matemática que nos permita encontrar la posición de la imagen producida por una S.R.E. cuando se conozcan sus características ( )n n R1 2, , y la
posición del objeto fuente. Como hicimos para los espejos esféricos establecemos antes unas
convenciones de signo que nos garanticen la validez de la fórmula cualquiera que sea la
superficie considerada.
- La luz viaja de izquierda derecha.
- Son positivas las distancias que se miden de izquierda a derecha y negativas aquellas que se
miden de derecha a izquierda.
- La distancia p del objeto a la S.R.E. se mide desde el objeto hacia el vértice.
- La distancia q entre la S.R.E. y la imagen se mide desde el vértice hacia la imagen.
- La primera distancia focal f1 se mide desde el primer foco F1 hacia el vértice; por lo
tanto f1 0> si el foco F1 es real, f1 0< si el foco F1 es virtual.
- La segunda distancia focal f2 se mide desde el vértice hacia el segundo foco F2 ; por lo
tanto f2 es positiva o negativa según sea real o virtual el segundo foco.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
8
- El radio de curvatura R se mide desde el centro de curvatura C hacia el vértice; por lo
tanto R es positivo o negativo según la superficie sea convexa o cóncava.
Construyamos entonces la imagen I de un objeto puntual localizado sobre el eje óptico mediante
la simple aplicación de la ley de Snell a un rayo cualquiera (pero paraxial) que incide sobre la
S.R.E.
qp r
Kv
co
P1
2
n1 n2
θ
θ
βα γ
Figura 8. Construcción de la imagen producida por una S.R.E.
Con relación a la Figura 8 aplicamos el teorema de los senos a los triángulos OPC y CPI y
obtenemos:
( )p R R+
−=
sen senππ θθ αα1 ;
q R R− =sen senθθ γγ2
de donde:
sen .senθθ αα1 = +p RR
; sen .senθθ γγ2 = −q RR
Es evidente que de acuerdo con la ley de Snell: n n1 1 2 2sen senθθ θθ= , lo que implica:
np R
Rn
q RR1 2
+ = −.sen .senαα γγ (1)

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
9
En la aproximación de rayos paraxiales los ángulos αα γγ, son pequeños de manera que
sen αα αα≅ tan y sen γγ γγ≅ tan ; igualmente K , que es el pie de la perpendicular trazada
desde P hacia el eje óptico, coincide aproximadamente con V , de manera que OK OV p≅ = ;
KI VI q≅ = .
Teniendo en cuenta estas aproximaciones podemos remplazar en la (1) sen αα αα≅ ≅tanhp
,
sen γγ γγ≅ ≅tanhq
y obtenemos:
np R
Rhp
nq R
Rhq1 2. . . .
+ = −
de donde se obtiene fácilmente:
np
nq
n nR
1 2 2 1+ = − (2)
que es la llamada fórmula de Gauss para superficies refractoras esféricas.
A través de la (2) podemos facilmente obtener la localización de los focos teniendo en cuenta que si p f= 1 entonces q = ∞ y viceversa si q f= 2 entonces p = ∞ , lo cual implica:
fn R
n n11
2 1=
−.
(3)
fn R
n n22
2 1=
−.
(4)
de donde:
ff
nn
12
12
= (5)
es decir que las distancias focales son proporcionales a los índices de refracción de los dos
medios separados por la S.R.E..

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
10
4. Construcción gráfica de imágenes.
Sin recurrir a la fórmula de Gauss puede determinarse, con buena aproximación, la posición de la
imagen producida por una S.R.E. realizando construcciones gráficas de acuerdo con las siguientes
reglas:
a) Un rayo que para por el centro de curvatura no se desvía. b) Un rayo que pase por (o se dirija hacia) el primer foco F1 (según éste sea real o virtual),
se refracta paralelamente al eje óptico.
c) Un rayo que incide paralelamente al eje óptico se refracta pasando por el segundo foco si éste es real, o de manera que su prolongación pase por el segundo foco F2 si éste es
virtual.
La Figura siguiente muestra algunos casos de interés.
n1 n2
CIV
O
n1 n2
C
F1 F2
IO
V
Nota : Las líneas naranja son prolongaciones de los rayos

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
11
n1 n2
C F1F2
IO
V
Nota : Las líneas naranja son prolongaciones de los rayos
Figura 9. Tres diversos casos de construcción gráfica de imágenes.
Como puede verse en la Figura 9 una S.R.E. convexa (cuando n n2 1> ) produce siempre imagen
real e invertida excepto cuando p f< 1 , caso en el cual se produce una imagen virtual y derecha;
una S.R.E. cóncava (para n n2 1> ) siempre produce imágenes virtuales y derechas.
5 Aumento de una S.R.E.
Habiendo definido el aumento a través de la relación A I= − 0 podemos encontrar el aumento
de una S.R.E. haciendo referencia a la Figura 10.
n1 n2
C
I
D
E
V
G
LB
A
O
Figura 10. Identificación de triángulos semejantes para la determinación del aumento de una S.R.E.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
12
Hay varios pares de triángulos semejantes:
a) La semejanza de los triángulos ABC y CDE nos da :
AI q R
p R= − = − −
+0 (6)
b) La semejanza de los triángulos ABF1 y F CV1 :
AI f
p f= − = −
−01
1 (7)
c) La semejanza de los triángulos LVF2 y F DE2 :
AI q f
f= − = − −
02
2 (8)

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
1
OPTICA GEOMETRICA
LENTES DELGADAS
Una lente es un sistema óptico limitado por dos superficies refractoras que tienen un eje en
común; por lo general las dos superficies son porciones de esfera o de plano y encierran un medio
cuyo índice de refracción es diferente con respecto a los índices de refracción que están a ambos
lados de la lente.
Cuando el espesor, medido en la dirección del eje de la lente, es lo suficientemente pequeño para
que pueda suponerse que la desviación de un rayo luminoso tenga lugar únicamente en el plano
que pasa por el centro de la lente, ésta se denomina lente delgada. Las lentes delgadas se
clasifican según la forma y según las propiedades de convergencia así:
a) b) c) a )1 b )1 c )1
Lentes Convergentes Lentes Divergentes
Figura 1. Propiedades de convergencia de lentes en aire. a) Biconvexa b) plano-convexa c) menisco-convergente. a') Biconvexa b') plano-cóncava c') menisco-divergente.
Es importante anotar que las propiedades de convergencia de una lente dependen de los medios
situados a los lados de ésta y que cuando estos medios no se especifican se entiende que la lente
está sumergida en aire.
Para estudiar los efectos de una lente delgada sobre los rayos luminosos, así como hicimos en el
análisis de los anteriores sistemas ópticos, utilizaremos la aproximación de rayos paraxiales y
supondremos que la lente sea lo suficientemente delgada para que las distancias con respecto a la

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
2
lente puedan medirse con respecto a un plano perpendicular al eje óptico del sistema y que pase
por el centro de la lente.
C2
V1V2
C1
C
A
B
Figura 2. Lente delgada. V V1 2, vértices de las dos S.R.E. que conforman
la lente, C C1 2, centros de curvatura de las S.R.E.; C centro de la lente; AB plano con respecto al cual se miden las distancias a la lente.
1 Propiedades focales.
Para las lentes convergentes se denomina primer foco F1 el punto desde el cual divergen los
rayos incidentes que cuando pasan por la lente se refractan paralelos al eje óptico.
f1
F1

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
3
f2
F2
Figura 3. Focos reales de una lente convergente.
Por otra parte se define segundo foco F2 el punto en el cual convergen los rayos refractados
que inciden, sobre la lente, paralelos al eje óptico.
Si por los dos focos trazamos planos perpendiculares al eje óptico de la lente se obtienen los
planos focales que gozan de las siguientes propiedades:
Primer plano focal: lugar geométrico de los puntos desde los cuales divergen los rayos
incidentes que se refractan paralelos entre sí.
Segundo plano focal: lugar geométrico de los puntos en los cuales convergen los rayos
refractados cuando inciden, sobre la lente, paralelos entre sí.
F 1 C
Pf1

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
4
F 2
C
Pf2
Figura 4. Planos focales de una lente convergente.
Para las lentes divergentes se denomina primer foco F1 el punto hacia el cual aparentemente
convergen los rayos incidentes que se refractan paralelos al eje óptico.
F 1
f1
F2
f2
Figura 5. Focos virtuales de una lente divergente.
Por otra parte se define segundo foco F2 el punto desde el cual aparentemente divergen los
rayos refractados que inciden paralelos al eje óptico.

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
5
Si por los dos focos trazamos planos perpendiculares al eje óptico de la lente, se obtienen los
planos focales que gozan de las siguientes propiedades:
Primer plano focal: lugar geométrico de los puntos hacia los cuales convergerían (en ausencia
de la lente) los rayos incidentes que se refractan paralelos entre sí.
Segundo plano focal: lugar geométrico de los puntos desde los cuales aparentemente divergen
los rayos refractados que inciden paralelos entre sí.
F 1
Pf1
F 2
Pf2
Figura 6. Planos focales de una lente divergente.

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
6
Como puede deducirse de las definiciones y de las Figuras 3, 4, 5, 6, los focos y los planos
focales son reales para lentes convergentes y virtuales para lentes divergentes.
2 Fórmula de Gauss para lentes delgadas.
Utilizando la aproximación de rayos paraxiales y las convenciones de signo que ya hemos
establecido para las S.R.E. vamos ahora a obtener una relación matemática mediante la cual es
posible calcular la posición de la imagen producida por una lente delgada cuando se conozca la
posición de objeto fuente y las características del sistema óptico. Para lograr el objetivo
determinaremos la posición de la imagen producida por la primera S.R.E. y utilizaremos esa
imagen como objeto fuente para la segunda S.R.E. Con relación a la Figura 7 , en la cual se ha
exagerado el espesor de la lente, calculamos a través de la fórmula para superficies refractoras , la
posición de la imagen I' producida por la primera S.R.E. así:
np
nq
n nR
1 2 2 1
1+ = −
' (1)
C I I´O C2 V1 V2 C1
41
32
n1n2 n3
θ θθθ
OV p1 = ; V C R1 1 1= ; V C R2 2 2= ; V I q1 ' '= ; V I q2 =
V V x V I p C1 2 2= = =; ' ' , centro de la lente.
Figura 7. Imagen producida por una lente.

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
7
De acuerdo con lo que hemos dicho la imagen I' funciona ahora como objeto fuente de la
segunda superficie de la cual dista V I p2 ' '= . Dado que, en este caso, esta distancia se recorre
de derecha a izquierda, I' es una fuente virtual para la segunda superficie y por lo tanto p' es
negativa, de manera, que para la segunda S.R.E. podemos escribir:
− + = −np
nq
n nR
2 3 3 2
2' (2)
Con relación a la Figura 7, es evidente que q x p' '= + , pero si la lente es delgada x ≅ 0 y por
lo tanto podemos decir que V C V1 2≡ ≡ y q p' '≅ . Combinando las ecuaciones (1), (2) se
obtiene:
np
nq
n nR
n nR
1 3 2 1
1
3 2
2+ = − + −
(3)
Esta última ecuación es la que generalmente se denomina fórmula de Gauss para lentes delgadas
en su forma más general.
Si la lente está sumergida en aire n n1 3 1≅ ≅ y está hecha con un material de índice de
refracción n la relación (3) se simplifica así:1
( )1 11
1 1
1 2p qn
R R+ = − −
(4)
Es fácil ver que en este caso( 1 ) las dos distancias focales f1 y f2 son iguales, de manera que
puede hablarse de la distancia focal f de la lente, la cual está dada por cualquiera de las dos
condiciones p f= y q = ∞ ó p = ∞ y q f= , en ambos casos se obtiene, según la (4):
( )11
1 1
1 2fn
R R= − −
(5)
Esta última relación se denomina fórmula del constructor de lentes porque evidentemente
permite construir una lente con una distancia focal predeterminada escogiendo el material con un
( 1 ) y en todos los casos en los cuales la lente está rodeada por un solo medio.

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
8
oportuno índice de refracción n y moldeándolo mediante superficies esféricas con los radios de
curvatura necesarios.
A la magnitud P f= 1 se le denomina poder de la lente; esta magnitud es obviamente positiva
para las lentes convergentes (que tienen distancia focal positiva dado que los focos son reales) y
negativa para las lentes divergentes (dado que éstas tienen focos virtuales y por lo tanto distancia
focal negativa); su unidad de medida es la dioptría equivalente naturalmente a m−1 ; por ejemplo
una lente cuyo poder sea P = +2 dioptrías es una lente convergente cuya distancia focal es 0.5
metros.
Combinando las ecuaciones (4) y (5) se obtiene:
1 1 1p q f
+ = (6)
ecuación formalmente idéntica a la ecuación para los espejos esféricos.
3 Construcción gráfica de imágenes.
Sin recurrir a la fórmula de Gauss es posible determinar, con buena aproximación, la posición de
la imagen producida por una lente delgada teniendo en cuenta que los rayos que pasan por (o se
dirigen hacia) el primer foco se desvían paralelos al eje óptico, los que inciden paralelos al eje
óptico se refractan de manera que pasan por (o divergen como si se generaran en) el segundo foco
y que los rayos que pasan por el centro de la lente no sufren desviación.
OF1 F2 I
(a)

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
9
Figura 8. a) Imagen real producida por una lente convergente.
b) Unico caso ( )p f< en el cual una lente convergente forma una imagen virtual. c) Una lente divergente siempre produce imagen virtual.
Con estas simples reglas podemos visualizar la imagen de cualquier objeto-fuente y determinar si
dicha imagen es real o virtual mediante construcciones gráficas, algunas de las cuales se
presentan en la Figura 8.
Tal como se muestra en la Figura 8 una lente convergente forma una imagen real e invertida siempre que p f> , pero forma una imagen virtual y derecha cuando p f< (éste es el caso
que se presenta cuando se utiliza una lente convergente como lupa).
Por otra parte una lente divergente produce siempre imágenes virtuales y derechas cualquiera que
sea la posición del objeto-fuente.
4 Aumento de una lente - Fórmula de Newton.
Si definimos, como en los casos anteriores, el aumento de una lente a través de la relación

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
10
AI= −0
donde el signo negativo da cuenta de la inversión de la imagen real con respecto al objeto-fuente,
es posible calcular el aumento estableciendo relaciones de proporcionalidad entre lados
homólogos en varias parejas de triángulos semejantes que pueden determinarse analizando la
Figura 9.
AC p CD q F C f= = =; ; ;1
CF f RF x F D x2 1 1 2 2= = =; ;
AB GC CH DE I= = = =0 ;
Figura 9. Determinación del aumento de una lente.
a) A partir de los triángulos semejantes ABF1 y F CH1 se obtiene:
AI f
x= − = −
0 1 (7)
b) Si consideramos los triángulos semejantes GCF2 y F DE2 se obtiene:
AI x
f= − = −
02 (8)
c) A través de los triángulos semejantes ABC y CHE obtenemos:
AI q
p= − = −
0 (9)

FÍSICA GENERAL PARA INGENIERÍA DEPARTAMENTO DE FÍSICA. .UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
11
Las tres relaciones que hemos encontrado para el aumento son obviamente equivalentes; sin
embargo combinando las ecuaciones (7), (8) se obtiene:
x x f1 22. = (10)
esta relación denominada fórmula de Newton es particularmente interesante porque permite
localizar la imagen producida por la lente (en este caso su distancia con respecto al segundo foco)
conociendo la distancia focal de la lente y la distancia del objeto-fuente al primer foco; esto nos
permite decir que la fórmula de Newton es equivalente a la fórmula de Gauss.

Utilizando la aproximación de rayos paraxiales y las convenciones de signo que
ya hemos establecido para las S.R.E. vamos ahora a obtener una relación matemática
mediante la cual es posible calcular la posición de la imagen producida por una lente
delgada cuando se conozca la posición de objeto fuente y las características del sistema
óptico. Para lograr el objetivo determinaremos la posición de la imagen producida por la
primera S.R.E. y utilizaremos esa imagen como objeto fuente para la segunda S.R.E.
Con relación a la Figura , en la cual se ha exagerado el espesor de la lente, calculamos a
través de la fórmula para superficies refractoras , la posición de la imagen I' producida
por la primera S.R.E. así:
1
1221
' R
nn
s
n
s
n −=+− (1)
De acuerdo con lo que hemos dicho la imagen I' funciona ahora como objeto
fuente de la segunda superficie de la cual dista V2I’ ==== p’. Dado que, en este caso, esta
distancia se recorre de derecha a izquierda, I’ es una fuente virtual para la segunda
superficie y por lo tanto p’ es negativa, de manera, que para la segunda S.R.E. podemos
escribir:
2
2332
''' R
nn
s
n
xs
n −=+
+− (2)
Con relación a la Figura 7, es evidente que q = x + p, pero si la lente es delgada x ≅ 0 y
por lo tanto podemos decir que V1 ≡ C ≡ V2 y q’ ≅ p’. Combinando las ecuaciones (1),
(2) se obtiene:
1
12
2
233221
2
2332
1
1221
2
2332
1
1221
''''
'''
'
'''
'
R
nn
R
nn
s
n
xs
n
s
n
s
n
R
nn
s
n
xs
n
R
nn
s
n
s
n
R
nn
s
n
xs
n
R
nn
s
n
s
n
−+−
=
++
−++−
+−
=++
−
−=+−
⇒
−=+
+−
−=+−

Sustituyendo los valores correspondientes tenemos lo siguiente:
1
12
2
2331
1
12
2
233221
1
12
2
233221
''
''0''''''
R
nn
R
nn
s
n
s
n
R
nn
R
nn
s
n
s
n
s
n
s
n
R
nn
R
nn
s
n
xs
n
s
n
s
n
−+
−=+−
−+−
=++
−+−⇒−+
−=
++
−++−
Como nosotros sabemos que el valor del índice de refracción n1 y el n3 es el
mismo ya que es el del agua, pues podemos simplificar la ecuación anterior:
( )
−−=
+−⇒−
+−
=+−12
2
1
2
2
2 11·
''
11·
'' RRnn
ssn
R
nn
R
nn
s
n
s
nagag
agagagag
Para obtener el valor del foco basta conocer que cualquier rayo proveniente del
infinito (s = + ∞) irá a parar al foco (s’’ = f ) o viceversa:
( )21
21
1212
11111·
10·
RR
RR
nn
nf
RRn
nn
fRRnn
fn
lenteag
ag
ag
lenteag
lenteagag +−=⇒
−
−=⇒
−−=
+
Por tanto, queda demostrado que la distancia focal de un sistema de lentes
depende de el media donde esté sumergido.

1
Gráficas y diagramas.
Cuando se habla en fotometría de magnitudes y unidades de media se definen una serie de términos y leyes que describen el comportamiento de la luz y sirven como herramientas de cálculo. Pero no hemos de olvidar que las hipótesis utilizadas para definirlos son muy restrictivas (fuente puntual, distribución del flujo esférica y homogénea, etc.). Aunque esto no invalida los resultados y conclusiones obtenidas, nos obliga a buscar nuevas herramientas de trabajo, que describan mejor la realidad, como son las tablas, gráficos o programas informáticos. De todos los inconvenientes planteados, el más grave se encuentra en la forma de la distribución del flujo luminoso que depende de las características de las lámparas y luminarias empleadas.
Influencia de la luminaria en la forma del haz de luz.
A menudo no le daremos mucha importancia a este tema, como pasa en la iluminación de interiores, pero será fundamental si queremos optimizar la instalación o en temas como la iluminación de calles, decorativa, de industrias o de instalaciones deportivas.
A continuación veremos los gráficos más habituales en luminotecnia:
• Diagrama polar o curva de distribución luminosa. • Diagramas isocandela.
o Alumbrado por proyección. o Alumbrado público. Proyección azimutal de Lambert.
• Curvas isolux.
Diagrama polar o curvas de distribución luminosa
En estos gráficos la intensidad luminosa se representa mediante un sistema de tres coordenadas (I,C, ). La primera de ellas I representa el valor numérico de la intensidad luminosa en candelas e indica la longitud del vector mientras las otras señalan la dirección. El ángulo C nos dice en qué plano vertical estamos y mide la inclinación respecto al eje vertical de la luminaria. En este último, 0º señala la vertical hacia abajo, 90º la horizontal y 180º la vertical hacia arriba. Los valores de C utilizados en las gráficas no se suelen indicar salvo para el alumbrado público. En este caso, los ángulos entre 0º y 180º quedan en el lado de la calzada y los comprendidos entre 180º y 360º en la acera; 90º y 270º son perpendiculares al bordillo y caen respectivamente en la calzada y en la acera.

2
Con un sistema de tres coordenadas es fácil pensar que más que una representación plana tendríamos una tridimensional. De hecho, esto es así y si representamos en el espacio todos los vectores de la intensidad luminosa en sus respectivas direcciones y uniéramos después sus extremos, obtendríamos un cuerpo llamado sólido fotométrico . Pero como trabajar en tres dimensiones es muy incómodo, se corta el sólido con planos verticales para diferentes valores de C (suelen ser uno, dos, tres o más dependiendo de las simetrías de la figura) y se reduce a la representación plana de las curvas más características.
En la curva de distribución luminosa , los radios representan el ángulo y las circunferencias concéntricas el valor de la intensidad en candelas. De todos los planos verticales posibles identificados por el ángulo C, solo se suelen representar los planos verticales correspondientes a los planos de simetría y los transversales a estos (C = 0º y C = 90º) y aquel en que la lámpara tiene su máximo de intensidad. Para evitar tener que hacer un gráfico para cada lámpara cuando solo varía la potencia de esta, los gráficos se normalizan para una lámpara de referencia de 1000 lm. Para conocer los valores reales de las intensidades bastará con multiplicar el flujo luminoso real de la lámpara por la lectura en el gráfico y dividirlo por 1000 lm.
Matriz de intensidades luminosas
También es posible encontrar estos datos en unas tablas llamadas matriz de intensidades luminosas donde para cada pareja de valores de C y obtenemos un valor de I normalizado para una lámpara de flujo de 1000 lm.

3
Diagramas isocandela
A pesar de que las curvas de distribución luminosa son herramientas muy útiles y prácticas, presentan el gran inconveniente de que sólo nos dan información de lo que ocurre en unos pocos planos meridionales (para algunos valores de C) y no sabemos a ciencia cierta qué pasa en el resto. Para evitar estos inconvenientes y conjugar una representación plana con información sobre la intensidad en cualquier dirección se definen las curvas isocandela.
En los diagramas isocandelas se representan en un plano, mediante curvas de nivel, los puntos de igual valor de la intensidad luminosa. Cada punto indica una dirección del espacio definida por dos coordenadas angulares. Según cómo se escojan estos ángulos, distinguiremos dos casos:
• Proyectores para alumbrado por proyección. • Luminarias para alumbrado público. Proyección azimutal de Lambert.
En los proyectores se utiliza un sistema de coordenadas rectangulares con ángulos en lugar de las típicas x e y. Para situar una dirección se utiliza un sistema de meridianos y paralelos similar al que se usa con la Tierra. El paralelo 0º se hace coincidir con el plano horizontal que contiene la dirección del haz de luz y el meridiano 0º con el plano perpendicular a este. Cualquier dirección, queda pues, definida por sus dos coordenadas angulares. Conocidas estas, se sitúan los puntos sobre el gráfico y se unen aquellos con igual valor de intensidad luminosa formando las líneas isocandelas .
En las luminarias para alumbrado público , para definir una dirección, se utilizan los ángulos C y usados en los diagramas polares. Se supone la luminaria situada dentro de una esfera y sobre ella se dibujan las líneas isocandelas. Los puntos de las curvas se obtienen por intersección de los vectores de intensidad luminosa con la superficie de esta. Para la representación plana de la superficie se recurre a la proyección azimutal de Lambert .

4
En estos gráficos, los meridianos representan el ángulo C, los paralelos y las intensidades, líneas rojas, se reflejan en tanto por ciento de la intensidad máxima. Como en este tipo de proyecciones las superficies son proporcionales a las originales, el flujo luminoso se calcula como el producto del área en el diagrama (en estereorradianes) por la intensidad luminosa en este área.
Además de intensidades y flujos, este diagrama informa sobre el alcance y la dispersión de la luminaria. El alcance da una idea de la distancia longitudinal máxima que alcanza el haz de luz en la calzada mientras que la dispersión se refiere a la distancia transversal.
Curvas isolux
Las curvas vistas en los apartados anteriores (diagramas polares e isocandelas) se obtienen a partir de características de la fuente luminosa, flujo o intensidad luminosa, y dan información sobre la forma y magnitud de la emisión luminosa de esta. Por contra, las curvas isolux hacen referencia a las iluminancias, flujo luminoso recibido por una superficie, datos que se obtienen experimentalmente o por calculo a partir de la matriz de intensidades usando la fórmula:
Estos gráficos son muy útiles porque dan información sobre la cantidad de luz recibida en cada punto de la superficie de trabajo y son utilizadas especialmente en el
alumbrado público donde de un vistazo nos podemos hacer una idea de como iluminan las farolas la calle.
Lo más habitual es expresar las curvas isolux en valores absolutos definidas para una lámpara de 1000 lm y una altura de montaje de 1 m .
Los valores reales se obtienen a partir de las curvas usando la expresión:
También puede expresarse en valores relativos a la iluminancia máxima (100%) para cada altura de montaje . Los valores reales de la iluminancia se calculan entonces como:
Ereal = Ecurva · E máx con
siendo a un parámetro suministrado con las gráficas.

5
Problemas resueltos
1. Una superficie está iluminada por una fuente lumino sa puntual de 80 cd de intensidad constante en todas direcciones situada a 2 m de altura. Calcular la iluminancia horizontal y vertical para los siguient es valores del ángulo alfa: 0, 30º, 45º, 60º, 75º y 80º.
Solución
Como vimos al hablar de magnitudes fotométricas, las componentes de la iluminancia, se pueden calcular empleando las fórmulas:
Y dado que conocemos todos los datos (h = 2 m, I = 80 cd y los diferentes valores de alfa) solo queda sustituir y calcular:
Como podemos ver, la mecánica de cálculo es siempre la misma. Así pues, los resultados finales son:
R (m) EH (lux) EV (lux) E (lux)
0º 0 20 0 20
30º 1.15 12.99 7.5 15
45º 2 7.07 7.07 10
60º 3.46 2.5 4.33 5
75º 7.45 0.35 1.29 1.34
80º 11 0.10 0.59 0.60

6
Si representamos el diagrama isolux de la superficie podemos observar que las curvas son circunferencias, debido a que la intensidad es constante en todas direcciones, que la iluminancia disminuye a medida que los puntos se alejan del foco y que la máxima iluminancia se encuentra en la proyección de la fuente sobre la superficie (0º).
2. Una superficie circular de 3 m de radio está ilumin ada por una bombilla de 50 cd de intensidad constante en todas direcciones sit uada a 2 m de altura sobre el centro de la plataforma. Calcular la iluminación má xima y mínima sobre la superficie.
Solución
En este caso nos piden la iluminancia sobre la superficie, es decir, la iluminancia horizontal. Como la intensidad es constante en todas direcciones y la altura también el valor de la iluminancia dependerá únicamente de la distancia de los puntos al foco. En nuestro caso el punto más próximo es la proyección de la bombilla sobre la superficie ( = 0º) y los más alejados son aquellos que están en los bordes (R = 3 m).
Iluminancia máxima:
Iluminancia mínima (R = 3 m):
3. Tenemos un proyector situado en el techo de 0.04 m 2 de superficie que ilumina con una intensidad de 100 cd en cualquier d irección una mesa de 0.5 m 2 de superficie. La mesa se puede considerar una supe rficie especular de factor de reflexión de 0.8. Calcular la luminancia de la f uente y la luminancia de la mesa para el observador de la figura.

7
Solución
Luminancia de la fuente:
Luminancia de la mesa:
Como la mesa no es una superficie reflectante perfecta una parte de la intensidad luminosa que le llega es absorvida por esta. Esto quiere decir que en la fórmula de la luminancia el valor de I estará afectado por el factor de reflexión.
4. Tenemos una luminaria simétrica situada en el centr o de una habitación de 5 x 2 m a 3 m de altura del suelo. Calcular la iluminan cia sobre los puntos marcados en el dibujo a partir del diagrama polar de la lumi naria. El flujo luminoso de la lámpara es de 500 lm.
Solución
En este caso la intensidad no es uniforme ni constante en cualquier dirección y por ello tenemos que trabajar con gráficos. Esto no supone ninguna complicación adicional respecto a lo visto anteriormente y la mecánica y las fórmulas empleadas siguen siendo las mismas. La única diferencia estriba en que los valores de la intensidad los tomaremos de un gráfico polar, que en este caso depende sólo del ángulo alfa debido a que la luminaria es simétrica.
Los pasos a seguir son:
• Calcular

8
• Leer I( ) relativo del gráfico
• Calcular la iluminancia
Iluminancia en a:
Iluminancia en b:
Iluminancia en c:

9
Iluminancia en d:
5. Un tramo de calle está iluminado por una farola de 10 m de altura y 10000 lm de flujo luminoso cuyo diagrama isolux se adjunta.
Calcular la iluminancia en los siguientes puntos de la calzada:

10
Solución
Resolver este problema es muy sencillo, pues sólo hay que trasladar los puntos de la calle al diagrama isolux dividiendo sus coordenadas por la altura de la luminaria, leer los valores del gráfico y calcular la iluminancia con la fórmula.
Iluminancia en c:
Las coordenadas absolutas de c son: x = 15 m e y =12.5 m
Ahora las dividimos por la altura (10 m) para convertirlas en valores relativos que situaremos sobre el gráfico:
xr = 1.5 ; yr = 1.25
A continuación leemos los valores relativos de la iluminancia del diagrama:
Coordenadas relativas
Er (lx/1000 lm)
(1.5,1.25) 5 lx
Finalmente aplicamos la fómula y ya está.

11
Como se puede ver el proceso a seguir es siempre igual y los resultados finales son:
Punto Coordenadas absolutas
Coordenadas relativas Er (lx/1000 lm) E (lx)
a (20,0) (2,0) 100 10
b (0,5) (0,0.5) 25 2.5
c (15,12.5) (1.5,1.25) 5 0.5
d (0,10) (0,1) 25 2.5
e (25,5) (2.5,0.5) 1 0.1
f (30,15) (3,1.5) 1 0.1
Problemas propuestos
1. Tenemos una fuente luminosa puntual de 100 cd de i ntensidad constante en todas direcciones situada sobre una plataforma rect angular de 20x10 m como la de la figura. Calcular la iluminación máxima y míni ma sobre la superficie y la iluminancia en los puntos (3, 10), (0, 15), (7, 20 ) y (10, 15).
Ver resultados
Coordenadas (15,4) (10,0) (3,10) (0,15) (7,20) (10,15)
E (lux) 11.10 0.0676 1.45 2.40 1.06 0.99
Ver solución
Coordenadas d (m) E (lux)
(15,4) 0 0º 11.10
(10,0) 16.16 79.48º 0.0676
(3,10) 5.1 59.53º 1.45
(0,15) 4 53.13º 2.40
(7,20) 5.83 62.77º 1.06
(10,15) 6 63.43º 0.99
2. Para la disposición de luminarias de la figura, cal cular la iluminancia en el centro de la placa (a) y en el punto b.

12
Ver resultados
Punto E (lux)
a 2.84
b 1.19
Ver solución
con
Como a está situada en el centro de simetrías de la placa d1, d2 y d3 son iguales.
Conocidos d y h, sabemos el ángulo alfa.
Punto a 1 2 3 Ea
d 5.59 5.59 5.59
48.19º 61.78º 40.31º
E (lux) 1.19 1.17 0.48 Ea = 2.84
Punto b 1 2 3 Eb
d 10 11.18 5
63.43º 74.98º 68.20º
E (lux) 0.36 0.19 0.64 Eb = 1.19
3. Para el tramo de calle de la figura, calcular la il uminancia en los puntos a, b, c, d, e y f. La farola mide 8 m de altura y la lámpara tiene un flujo de 15000 lm. Asimismo, se suministran los diagramas polares de l as luminarias referenciadas a 1000 lm.

13
Diagramas polares disponibles: Ambos
Ver resultados
Punto a b c d e f
E(lux) 21.09 19.06 15.08 15.72 6.15 11.17
Ver solución
Punto d (m) tan C Ir (cd/1000 lm) I (lm) E (lx)
a 0 0 0º 0º 90 1350 21.09
b 8 1 45º 90º 230 3450 19.06
c 4 0.5 26.6º 270º 90 1350 15.08
d 5 0.625 32º 180º 110 1650 15.72
e 14 1.75 60.3º 0º 210 3150 6.15
f 10 1.25 51.3º 45º 195 2925 11.17
4. Para el tramo de calle de la figura calcular las il uminancias de los puntos a, b, c y d a partir de la matriz de intensidades lumino sas de la luminaria.
Otros datos:
h = 10 m= 20000 lm
90º 120º 150º 180º 210º 240º 270º
0º 140 140 140 140 140 140 140
10º 120 130 130 135 160 200 230
20º 110 120 120 125 210 290 310
30º 100 110 115 160 300 320 330
40º 90 100 110 180 400 330 260
50º 70 80 100 200 450 190 110
60º 60 70 120 280 470 90 60
70º 30 20 60 230 300 60 20
80º 5 8 10 15 35 40 15
90º 0 0 0 0 0 0 0
cd / 1000 lm

14
Ver resultados
Punto a b c d
E(lux) 28 13.44 13 4.78
Ver solución

1
Problemas resueltos
1. Una superficie está iluminada por una fuente lumino sa puntual de 80 cd de intensidad constante en todas direcciones situada a 2 m de altura. Calcular la iluminancia horizontal y vertical para los siguient es valores del ángulo alfa: 0, 30º, 45º, 60º, 75º y 80º.
Solución
Como vimos al hablar de magnitudes fotométricas, las componentes de la iluminancia, se pueden calcular empleando las fórmulas:
Y dado que conocemos todos los datos (h = 2 m, I = 80 cd y los diferentes valores de alfa) solo queda sustituir y calcular:
Como podemos ver, la mecánica de cálculo es siempre la misma. Así pues, los resultados finales son:
R (m) EH (lux) EV (lux) E (lux)
0º 0 20 0 20
30º 1.15 12.99 7.5 15
45º 2 7.07 7.07 10
60º 3.46 2.5 4.33 5
75º 7.45 0.35 1.29 1.34
80º 11 0.10 0.59 0.60

2
Si representamos el diagrama isolux de la superficie podemos observar que las curvas son circunferencias, debido a que la intensidad es constante en todas direcciones, que la iluminancia disminuye a medida que los puntos se alejan del foco y que la máxima iluminancia se encuentra en la proyección de la fuente sobre la superficie (0º).
2. Una superficie circular de 3 m de radio está ilumin ada por una bombilla de 50 cd de intensidad constante en todas direccion es situada a 2 m de altura sobre el centro de la plataforma. Calcular l a iluminación máxima y mínima sobre la superficie.
Solución
En este caso nos piden la iluminancia sobre la superficie, es decir, la iluminancia horizontal. Como la intensidad es constante en todas direcciones y la altura también el valor de la iluminancia dependerá únicamente de la distancia de los puntos al foco. En nuestro caso el punto más próximo es la proyección de la bombilla sobre la superficie ( = 0º) y los más alejados son aquellos que están en los bordes (R = 3 m).
Iluminancia máxima:
Iluminancia mínima (R = 3 m):
3. Tenemos un proyector situado en el techo de 0.04 m 2 de superficie que ilumina con una intensidad de 100 cd en cualquier d irección una mesa de 0.5 m 2 de superficie. La mesa se puede considerar una supe rficie especular de factor de reflexión de 0.8. Calcular la luminancia de la f uente y la luminancia de la mesa para el observador de la figura.

3
Solución
Luminancia de la fuente:
Luminancia de la mesa:
Como la mesa no es una superficie reflectante perfecta una parte de la intensidad luminosa que le llega es absorvida por esta. Esto quiere decir que en la fórmula de la luminancia el valor de I estará afectado por el factor de reflexión.
4. Tenemos una luminaria simétrica situada en el centr o de una habitación de 5 x 2 m a 3 m de altura del suelo. Calcular la iluminan cia sobre los puntos marcados en el dibujo a partir del diagrama polar de la lumi naria. El flujo luminoso de la lámpara es de 500 lm.
Solución
En este caso la intensidad no es uniforme ni constante en cualquier dirección y por ello tenemos que trabajar con gráficos. Esto no supone ninguna complicación adicional respecto a lo visto anteriormente y la mecánica y las fórmulas empleadas siguen siendo las mismas. La única diferencia estriba en que los valores de la intensidad los tomaremos de un gráfico polar, que en este caso depende sólo del ángulo alfa debido a que la luminaria es simétrica.
Los pasos a seguir son:
• Calcular

4
• Leer I( ) relativo del gráfico
• Calcular la iluminancia
Iluminancia en a:
Iluminancia en b:
Iluminancia en c:

5
Iluminancia en d:
5. Un tramo de calle está iluminado por una farola de 10 m de altura y 10000 lm de flujo luminoso cuyo diagrama isolux se adjunta.
Calcular la iluminancia en los siguientes puntos de la calzada:

6
Solución
Resolver este problema es muy sencillo, pues sólo hay que trasladar los puntos de la calle al diagrama isolux dividiendo sus coordenadas por la altura de la luminaria, leer los valores del gráfico y calcular la iluminancia con la fórmula.
Iluminancia en c:
Las coordenadas absolutas de c son: x = 15 m e y =12.5 m
Ahora las dividimos por la altura (10 m) para convertirlas en valores relativos que situaremos sobre el gráfico:
xr = 1.5 ; yr = 1.25
A continuación leemos los valores relativos de la iluminancia del diagrama:
Finalmente aplicamos la fómula y ya está.
Como se puede ver el proceso a seguir es siempre igual y los resultados finales son:
Punto Coordenadas absolutas
Coordenadas relativas Er (lx/1000 lm) E (lx)
a (20,0) (2,0) 100 10
b (0,5) (0,0.5) 25 2.5
c (15,12.5) (1.5,1.25) 5 0.5
d (0,10) (0,1) 25 2.5
e (25,5) (2.5,0.5) 1 0.1
f (30,15) (3,1.5) 1 0.1
Coordenadas relativas
Er (lx/1000 lm)
(1.5,1.25) 5 lx

7
Problemas propuestos
1. Tenemos una fuente luminosa puntual de 100 cd de i ntensidad constante en todas direcciones situada sobre una plataforma rect angular de 20x10 m como la de la figura. Calcular la iluminación máxima y míni ma sobre la superficie y la iluminancia en los puntos (3, 10), (0, 15), (7, 20 ) y (10, 15).
Ver resultados
Coordenadas (15,4) (10,0) (3,10) (0,15) (7,20) (10,15)
E (lux) 11.10 0.0676 1.45 2.40 1.06 0.99
Solución
Como la intensidad es constante en todas direcciones y la altura también el valor de la iluminancia depende sólo de la distancia de los puntos al foco. El punto más próximo es la proyección de la fuente sobre la superficie (15,4) y el más alejado es (10,0). Conocidas la altura del foco y la distancia horizontal de este a los distintos puntos saber el valor de alfa es un problema de trigonometría. Entonces sólo queda aplicar la fórmula y resolver el problema.
Iluminancia en (15,4) (máxima):
Iluminancia en (10,0) (mínima):
Iluminancia en (3,10) :

8
Iluminancia en (0,15) :
Como podemos ver, la mecánica de cálculo es siempre la misma. Así pues, los resultados finales son:
Coordenadas d (m) E (lux)
(15,4) 0 0º 11.10
(10,0) 16.16 79.48º 0.0676
(3,10) 5.1 59.53º 1.45
(0,15) 4 53.13º 2.40
(7,20) 5.83 62.77º 1.06
(10,15) 6 63.43º 0.99
2. Para la disposición de luminarias de la figura, cal cular la iluminancia en el centro de la placa (a) y en el punto b.
Ver resultados
Punto E (lux)
a 2.84
b 1.19
Solución
En este caso la diferencia radica en que hay más de una fuente de luz, pero esto no ha de suponer una mayor dificultad. Como las iluminancias sobre un punto son aditivas, lo que hay qye hacer es calcular la contribución de cada foco sobre dicho punto y sumarlas.
con
Ver más
Iluminancia en a:

9
Como a está situada en el centro de simetrías de la placa d1, d2 y d3 son iguales.
Conocidos d y h, sabemos el ángulo alfa.
Por fin, ya sólo queda calcular las iluminancias producidas por cada foco sobre el punto a:
Finalmente sumamos E1, E2 y E3 y ya está:
Para el punto b el proceso a seguir es el mismo de antes. Así pues, los resultados finales son:
Punto a 1 2 3 Ea
d 5.59 5.59 5.59
48.19º 61.78º 40.31º
E (lux) 1.19 1.17 0.48 Ea = 2.84
Punto b 1 2 3 Eb
d 10 11.18 5
63.43º 74.98º 68.20º
E (lux) 0.36 0.19 0.64 Eb = 1.19
3. Para el tramo de calle de la figura, calcular la il uminancia en los puntos a, b, c, d, e y f. La farola mide 8 m de altura y la lámp ara tiene un flujo de 15000 lm. Asimismo, se suministran los diagramas polares de l as luminarias referenciadas a 1000 lm.

10
Diagramas polares disponibles:
Ver resultados
Punto a b c d e f
E(lux) 21.09 19.06 15.08 15.72 6.15 11.17
Solución
En este caso la intensidad no es uniforme ni constante en cualquier dirección y por ello tenemos que trabajar con gráficos. Esto no supone ninguna complicación adicional respecto a lo visto anteriormente y la mecánica y las fórmulas empleadas siguen siendo las mismas. La única diferencia estriba en que los valores de la intensidad, que ahora depende de los ángulos alfa y C, los tomaremos de un gráfico polar.
Los pasos a seguir son:
• Calcular
• Leer I( ) relativo del gráfico según el valor de C (si no disponemos del gráfico hay que interpolar) y calcular I real

11
• Calcular la iluminancia
Ver más
Iluminancia en a:
Iluminancia en b:
Iluminancia en f:
A este punto le correspondería una curva de C = 135º, pero como no disponemos de esta hemos de interpolar la intensidad luminosa a partir de los valores de las curvas de C = 90º y C = 180º para un valor de alfa de 51.3º.

12
Como se puede ver, la mecánica de cálculo es siempre la misma y los resultados finales son:
Datos: h = 8 m; = 15000 lm
Punto d (m) tan C Ir (cd/1000 lm) I (lm) E (lx)
a 0 0 0º 0º 90 1350 21.09
b 8 1 45º 90º 230 3450 19.06
c 4 0.5 26.6º 270º 90 1350 15.08
d 5 0.625 32º 180º 110 1650 15.72
e 14 1.75 60.3º 0º 210 3150 6.15
f 10 1.25 51.3º 45º 195 2925 11.17
4. Para el tramo de calle de la figura calcular las il uminancias de los puntos a, b, c y d a partir de la matriz de intensidades lumino sas de la luminaria.
Otros datos:
h = 10 m= 20000 lm
90º 120º 150º 180º 210º 240º 270º
0º 140 140 140 140 140 140 140
10º 120 130 130 135 160 200 230
20º 110 120 120 125 210 290 310
30º 100 110 115 160 300 320 330
40º 90 100 110 180 400 330 260
50º 70 80 100 200 450 190 110
60º 60 70 120 280 470 90 60
70º 30 20 60 230 300 60 20
80º 5 8 10 15 35 40 15
90º 0 0 0 0 0 0 0
cd / 1000 lm
Ver resultados
Punto a b c d
E(lux) 28 13.44 13 4.78

13
Solución
El problema es idéntico al anterior con la salvedad de que ahora nos dan una tabla en lugar de un gráfico.
Iluminancia en a:
Iluminancia en b:
Como no disponemos de valores de gamma para 45º tendremos que interpolar a partir de los valores de gamma de 40º y 50º para C = 180º (como la luminaria es simétrica los valores para C =180º y 0º son iguales).
Iluminancia en c:

14
Iluminancia en d:
Como no disponemos de valores de C para 135º tendremos que interpolar a partir de los valores de C igual a 120º y 150º para un valor de gamma de 50º.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
1
1
OPTICA GEOMÉTRICA SUPERFICIES REFLECTORAS :ESPEJOS
1. ESPEJOS ESFERICOS Y PLANOS
Un espejo esférico es un sistema óptico constituido por una porción de superficie esférica
recubierta por un material reflectante; el espejo puede ser cóncavo o convexo dependiendo de
cual sea la superficie que refleja la luz.
C V
a)
Vriθθ
C
b)
V
r
iθθ
Figura 1 . a) Espejo esférico cóncavo. b) Espejo esférico convexo.
Naturalmente los espejos esféricos forman imágenes, por reflexión, de fuentes luminosas; estas
imágenes pueden determinarse teniendo en cuenta que cada rayo que incide sobre el espejo se
refleja de acuerdo con la ley ordinaria de la reflexión, es decir de manera que los ángulos de
incidencia y de reflexión sean iguales; sin embargo los espejos esféricos tienen algunas
propiedades que nos permiten localizar las imágenes a través de una simple relación matemática
que obtendremos a través de algunas hipótesis y aproximaciones.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
2
2
Definamos eje óptico del espejo a la recta que pasa por el centro de curvatura de la superficie
esférica a la cual pertenece el espejo y por el centro geométrico o vértice del casquete esférico
que conforma el espejo.
2. Propiedades focales.
Si consideramos un conjunto de rayos incidentes paralelos al eje óptico del espejo,
experimentalmente puede observarse que esos rayos cuando se reflejan se cruzan todos,
aproximadamente, en un punto( 1 ) llamado foco del espejo.
La aproximación es bastante buena si consideramos rayos incidentes paraxiales o sea rayos
divergentes de la fuente luminosa contenidos en un cono de pequeña abertura angular alrededor
del eje óptico o rayos paralelos cercanos al eje óptico del espejo. Puede demostrarse fácilmente
(Figura 2) que el foco está aproximadamente situado en el punto medio entre el centro de
curvatura y el vértice del espejo.
P
C VF
T
r
i
iθ
θθ
Figura 2. Con la aproximación de rayos paraxiales la distancia focal
f FV= es igual a la mitad del radio de curvatura R CV= .
( 1 ) Esta observación sería estrictamente cierta para un espejo parabólico debido a las
propiedades geométricas de la parábola; para un espejo esférico los rayos se cruzan en una zona pequeña llamada cáustica que se vuelve con buena aproximación puntual para rayos paraxiales.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
3
3
Con relación a la Figura 2 es fácil ver que TPC PCF$ $= porque son ángulos alternos internos
para las paralelas TP y CV , por otro lado TPC CPF$ $= por ley de reflexión, lo cual implica
que el triángulo CPF$ es isósceles porque FCP CPF$ $= , por lo tanto CF FP= .
Para rayos paraxiales FP FV≅ y entonces CF FV R≅ = 2 ; por consiguiente la distancia
focal FV f R= = 2 .
Para los espejos convexos los rayos que inciden paralelos al eje óptico son divergentes una vez
hayan sido reflejados por el espejo, pero sus prolongaciones también se cruzan aproximadamente
en un punto focal; en este caso se dice que el foco es virtual dado que en ese punto localizado
detrás del espejo no hay una efectiva concentración de energía( 1 ) , sino que los rayos reflejados
por el espejo son percibidos como divergentes del punto focal. (Figura 3).
C F V
a)
CFV
b)
Nota Las líneas naranja son las prolongaciones de los rayos Figura 3. a) Foco real de un espejo esférico cóncavo. b) Foco virtual de un espejo esférico convexo.
( 1 ) El foco de un espejo cóncavo es real en el sentido que en ese punto hay una efectiva
concentración de la energía luminosa.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
4
4
Cuando los rayos luminosos inciden paralelos entre sí mas no paralelos al eje óptico, también se
cruzan en un punto una vez reflejados por un espejo cóncavo o también aparecen divergentes
desde un punto cuando son reflejados por un espejo convexo; esos puntos están situados sobre un
plano perpendicular al eje óptico que pasa por el foco real o virtual del espejo.
Ese plano que es el conjunto de todos los puntos en los cuales convergen los rayos reflejados
generados por rayos incidentes paralelos entre sí (espejo cóncavo) o desde los cuales
aparentemente divergen los rayos reflejados generados por rayos incidentes paralelos entre sí
(espejo convexo) se llama plano focal y es real para espejos cóncavos y virtual para espejos
convexos (Figura 4).
CCF
FV
b)A)
V
Nota Las líneas naranja son las prolongaciones de los rayos Figura 4. a) Plano focal real para un espejo cóncavo. b) Plano focal virtual para una espejo convexo.
3 Fórmula de Gauss.
Veamos ahora como podemos determinar la posición de la imagen formada por un espejo
(cóncavo o convexo) cuando se conozca la posición del objeto fuente y las características del
espejo, es decir su radio de curvatura.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
5
5
Con el fin de que la relación analítica que encontremos sea útil, es necesario que pueda aplicarse
cualesquiera que sean las características del espejo e indiferentemente si la imagen es real o
virtual; para garantizar lo anterior deben establecerse unas convenciones de signo que resumimos
así:
• La luz viaja de izquierda a derecha.
• Son positivas las distancias que se miden de izquierda a derecha.
• Son negativas las distancias que se miden de derecha a izquierda. • La distancia p del objeto al espejo se mide desde el objeto hacia el vértice.
• La distancia q de la imagen al espejo se mide desde la imagen hacia el vértice del
espejo; lo que implica que q es positiva para imágenes reales y negativa para imágenes
virtuales.
• El radio de curvatura R se mide desde el centro de curvatura hacia el vértice del espejo,
de manera que es positivo o negativo según el espejo sea cóncavo o convexo. • La distancia focal f se mide desde el foco hacia el vértice del espejo, lo que implica
que f es positiva o negativa según el foco sea real o virtual.
Tracemos entonces la trayectoria de un haz de luz que incide sobre un espejo.
R
O CI F V
p
q
f
γβα
θθ
Figura 5. Imagen de una fuente puntual producida por un espejo esférico cóncavo
Con relación a la Figura 5 podemos observar que, en el triángulo OPI , el segmento CP es bisector del ángulo CPI$ lo que implica de acuerdo con el teorema de la bisectríz (geometría
euclidiana):

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
6
6
OP IP OC CI: := (1)
En la aproximación de rayos paraxiales podemos aceptar que OP OV p≅ = , IP IV q= = ;
por otra parte es obvio que OC OV CV p R= − = − y, CI CV IV R q= − = − , así que de
la (1) obtenemos:
p q p R R q: := − −
de donde:
pR pq pq qR− = − .
Reorganizando y dividiendo por p q R. . se llega a:
1 1 2 1p q R f
+ = = (2)
Esta ecuación llamada fórmula de Gauss es aplicable a cualquier espejo esférico siempre que se
tengan en cuenta las convenciones de signo; incluso la fórmula puede aplicarse a los espejos
planos que, como se sabe, producen imágenes virtuales a la misma distancia detrás del espejo a
la cual está situada la fuente delante del espejo.
Para los espejos planos que pueden considerarse como espejos esféricos de radio R infinito se
obtiene, a partir de la (2):
1 1 2
0p q R
+ = =
de donde q p= −
que coincide con el resultado esperado.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
7
7
4 Construcción gráfica de imágenes.
Sin recurrir a la fórmula de Gauss, es posible determinar con bastante precisión la posición de la
imagen producida por un espejo utilizando construcciones gráficas de acuerdo con las siguientes
reglas:
- Todo rayo que incide paralelamente al eje óptico se refleja de manera que pase por el foco
real o que su prolongación pase por el foco virtual.
- Todo rayo incidente que pasa por el centro de curvatura C se refleja sobre si mismo.
- Todo rayo incidente que pase por el foco real o cuya prolongación se dirija hacia el foco
virtual se refleja paralelamente al eje óptico (consecuencia del principio de reversibilidad).
Las figuras siguientes presentan algunos casos de importancia obtenidos mediante el uso de las
anteriores reglas.
FC
O V
I
a)
CF
OV
I
b)

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
8
8
CFOV
I
c)
Nota: Las líneas rojas son las prolongaciones de los rayos Figura 6 . a) Imagen real formada por un espejo cóncavo.
b) Caso único ( )p f< de imagen virtual formada por un espejo cóncavo.
c) Un espejo convexo siempre forma una imagen virtual.
Como puede deducirse de la Figura 3.13 un espejo cóncavo forma generalmente (excepto para p f< ) imagen real e invertida; el único caso en el cual el espejo cóncavo forma una imagen
virtual y derecha ocurre cuando p f< , mientras un espejo convexo siempre produce una
imagen virtual y derecha.
4 Aumento.
La anterior figura también nos muestra como el tamaño de la imagen es variable de acuerdo con
la posición del objeto fuente; se define entonces como aumento del espejo a la relación A I= − 0 ( 1 ) entre los tamaños de la imagen y del objeto.
Con relación a la Figura 7 hay varios pares de triángulos semejantes, por ejemplo:
1) Triángulo ABC y triángulo CNM para los cuales:
AI R q
p R= − = −
−−0
(3)
2) Triángulo lim22 θθ > y triángulo NVM para los cuales: ( 1 ) El signo negativo tiene en cuenta que cuando p q, son positivas (es decir para imágenes
reales), la imagen resulta invertida con respecto al objeto, mientras cuando p es positiva y q es negativa (es decir para imágenes virtuales) la imagen resulta derecha.

FÍSICA INTERACTIVA PARA INGENIEROS DEPARTAMENTO DE FÍSICA DE LA UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
9
9
AI p
q= − = −
0 (4)
CO
B
A
P
V
Q
FN
M
I
Figura 7. Imagen real e invertida producida por un espejo cóncavo.

1. Delante de un espejo cóncavo de 50 cm de focal y a 25 cm de su vértice se
encuentra un objeto cuya altura, perpendicular al eje, es de 1 cm. Calcular la posición y
el tamaño de la imagen suponiendo que los rayos incidentes corresponden a la zona
paraxial. Repetir el problema considerando que el espejo es convexo.
La solución gráfica para el primer caso cuando se tiene una lente delgada y
convergente es la siguiente:
La solución analítica para el primer caso cuando se tiene una lente delgada y
convergente es la siguiente:
y
y
s
s
fsscmf
cmy
cms
'''
'
11
'
1
50
1
25
=−=
=+⇒
===
β
Despejando términos se obtiene el siguiente resultado:
cmyy
y
y
s
s
cmsssss
21·25
50'
1
'
25
50''
5025
250.1'
250.1
25
'
1
250.1
5025
'
1
25
1
50
1
'
1
50
1
25
1
'
1
==⇒=−−⇒=−
−=−=⇒−=⇒−=⇒−=⇒=+
Por tanto, para un espejo cóncavo cuya distancia focal es de 50 cm y a 25 m del
vértice se sitúa un objeto cuya altura, perpendicular al eje, es de 1 cm la posición y el
tamaño de la imagen imaginaria en la aproximación paraxial es de 50 cm (al lado
opuesto de donde está el objeto) y de 2 cm (imagen derecha), respectivamente.
F
C
'ss
'yy


Delante de una lente delgada convergente situada en aire cuya distancia focal
imagen es de 20 cm y a 5 m de la lente se sitúa un objeto cuya altura, perpendicular al
eje, es de 2 cm. Determinar la posición y el tamaño de la imagen en la aproximación
paraxial. Repetir el problema suponiendo que la lente es divergente y que f’ es de -20
cm.
La solución gráfica para el primer caso cuando se tiene una lente delgada y
convergente es la siguiente:
La solución analítica para el primer caso cuando se tiene una lente delgada y
convergente es la siguiente:
y
y
s
s
fsscmf
cmy
cmms
'''
'
11
'
1
20'
2
5005
==
=+−⇒
==
==
β
Despejando términos se obtiene el siguiente resultado:
cmyy
y
y
s
s
cmsssss
083'012
12·
500
6
125
'2
'
500
6
125
''
83'206
125'
000.10
480
'
1
000.10
50020
'
1
20
1
500
1
'
1
20
1
500
1
'
1
−≈−=−
=⇒=−
⇒=
−≈−=⇒−=⇒−=⇒−=⇒=+−
Por tanto, para una lente convergente cuya distancia focal imagen es de 20 cm y
a 5 m de la lente se sitúa un objeto cuya altura, perpendicular al eje, es de 2 cm la
posición y el tamaño de la imagen real en la aproximación paraxial es de 20’83 cm (al
lado opuesto de donde está el objeto) y de 0’083 cm (imagen invertida),
respectivamente.

La solución gráfica para el segundo caso cuando se tiene una lente delgada y
divergente es la siguiente:
La solución analítica para el primer caso cuando se tiene una lente delgada y
convergente es la siguiente:
y
y
s
s
fsscmf
cmy
cmms
'''
'
11
'
1
20'
2
5005
==
=+−⇒
−==
==
β
Despejando términos se obtiene el siguiente resultado:
cmyy
y
y
s
s
cmsssss
077'013
12·
500
13
250
'2
'
500
13
250
''
23'1913
250'
000.10
520
'
1
000.10
50020
'
1
20
1
500
1
'
1
20
1
500
1
'
1
≈==⇒=⇒=
≈=⇒=⇒+=⇒+=⇒−=+−
Por tanto, para una lente divergente cuya distancia focal imagen es de - 20 cm y
a 5 m de la lente se sitúa un objeto cuya altura, perpendicular al eje, es de 2 cm la
posición y el tamaño de la imagen virtual (se creo con las prolongaciones de los rayos)
en la aproximación paraxial es de 19’23 cm (al mismo lado donde está el objeto) y de
0’077 cm (imagen derecha), respectivamente.

Plano focal
Línea auxiliar

1
Ejercicio 8.
Tenemos dos lentes delgadas convergentes de la misma focal cmff 20'
2
'
1 == .
Las lentes distan 50 cm entre sí. Un punto luminoso está a la izquierda de la primera
lente a 30 cm.
a) Determinar la posición de la imagen.
b) Acercamos el objeto a 10 cm a la lente. Determinar la nueva posición.
c) Calcula las matrices de transferencia en ambos casos.
a) Determinar la posición de la imagen. (Figura 1)
Cálculos y análisis del caso de la primera imagen formada:
Para el caso de una lente ya sea convergente o divergente emplearemos las
ecuaciones correspondientes tales como:
y
y
s
s
fss
''
'
1
'
11 ===+− β
donde s hace referencia a la distancia que existe entre el objeto y la lente (que en
nuestro caso es de s = – 30 cm puesto que se encuentra a una distancia de 30 cm de la
primera lente y está en su izquierda). La distancia focal de dicha lente es de + 20 cm (el
valor positivo lo añadimos ya que se trata de una lente convergente). Por último, la
altura la supondremos positiva ya que el enunciado no nos dice a que altura está.
Sustituyendo estos datos en las ecuaciones antes mostradas, obtenemos los siguientes
resultados:
( ) ( )
11
1
1
1
1
1
11
1
11
111
11
11
1111111
2''
30
60''
602030
20·30'
'
'·'
'·
'
'
11
'
1
'
1
'
1
'
11
yyy
y
cm
cm
y
y
s
s
cmsfs
fss
fs
fs
ssfsfss
−=⇒=−+
⇒==
+=+−
−=⇒+
=⇒+=⇒+=⇒=+−
β
Cálculos y análisis del caso de la segunda imagen formada:
Hemos obtenido que la imagen de dicho punto luminoso está situada a 60 cm a
la derecha de la primera lente (a la derecha de la lente puesto que el signo positivo nos
lo indica) y con una altura el doble de mayor que la inicial pero invertida. Observando
la figura podremos observar que si sale a 60 cm a la derecha de la lente, su localización
respecto a la segunda lente es a 10 cm a la derecha de ésta última. Por tanto, si
repetimos de nuevo el mismo proceso tenemos que: cmfyyy 20';2' 2112 +=−==
;105060'12 cmcmcmdss +=−+=−= Sustituyendo estos datos en las ecuaciones antes
mostradas, obtenemos los siguientes resultados:

2
( ) ( )
cmycmyyy
y
cm
cm
y
y
s
s
cmsfs
fss
fs
fs
ssfsfss
112
1
2
2
2
2
21
2
22
222
22
22
2222222
3
4
3
2·2'
2
'
10
3
20
''
3
20
2010
20·10'
'
'·'
'·
'
'
11
'
1
'
1
'
1
'
11
−=−=⇒−
=+
+⇒==
+=++
+=⇒+
=⇒+=⇒+=⇒=+−
β
En definitiva tenemos una imagen invertida creada cuya altura es de 1.33 veces
la del objeto y cuya posición es de:
- 86.667 cm a la derecha del objeto.
- 56.667 cm a la derecha de la primera lente.
- 6.667 cm a la derecha de la segunda lente.
Figuras

3
Acercamos el objeto a 10 cm a la lente. Determinar la nueva posición. (Figura 2)
Para el caso de una lente ya sea convergente o divergente emplearemos las
ecuaciones correspondientes tales como:
y
y
s
s
fss
''
'
1
'
11 ===+− β
donde s hace referencia a la distancia que existe entre el objeto y la lente (que en
nuestro caso es de s = – 20 cm puesto que se encuentra a una distancia de 20 cm de la
primera lente y está en su izquierda). La distancia focal de dicha lente es de + 20 cm (el
valor positivo lo añadimos ya que se trata de una lente convergente). Por último, la
altura la supondremos positiva ya que el enunciado no nos dice a que altura está.
Sustituyendo estos datos en las ecuaciones antes mostradas, obtenemos los
siguientes resultados:
( ) ( )
11
1
1
1
1
1
1
1
1
11
111
11
11
1111111
·''
20
''
2020
20·20'
'
'·'
'·
'
'
11
'
1
'
1
'
1
'
11
yyy
y
cm
cm
y
y
s
s
cmsfs
fss
fs
fs
ssfsfss
−∞=⇒=−
∞+⇒==
+∞=+−
−=⇒+
=⇒+
=⇒+=⇒=+−
β
Cálculos y análisis del caso de la segunda imagen formada:
Hemos obtenido que la imagen de dicho punto luminoso está situada a mucha
distancia a la derecha de la primera lente (a la derecha de la lente puesto que el signo
positivo nos lo indica) y con una altura mucho mayor que la inicial pero invertida.
Observando la figura podremos observar que si sale a ∞+ cm a la derecha de la lente, su
localización respecto a la segunda lente es a ∞+ cm a la derecha de ésta última. Por
tanto, si repetimos de nuevo el mismo proceso tenemos que:
cmfcmyyycmcmcmdss 20';·';50' 211212 +=−∞==+∞=−+∞=−=
Sustituyendo estos datos en las ecuaciones antes mostradas, obtenemos los
siguientes resultados:
cmyycmy
y
cmcmy
y
cm
cm
y
y
s
s
cmsfsfsfsfsfss
lims
12
1
2
1
2
2
2
2
21
2
22222222222
'·
'1
·
'20''
20''
1
'
1
'
11
'
11
'
1
'
1
'
1
'
11
2
−=⇒∞−
=∞+
⇒∞−
=∞+
+⇒==
+=⇒=⇒=
+⇒+=⇒=+−
+∞→
β
En definitiva tenemos una imagen invertida creada cuya altura es de 20 cm
independientemente de la del objeto y cuya posición es de:
- 100 cm a la derecha del objeto.
- 50 cm a la derecha de la primera lente.
- 20 cm a la derecha de la segunda lente.

4
b) Calcula las matrices de transferencia en ambos casos.
;10
'1;
10
1
;
120
1
01;
10
501;
120
1
01
'
321
−=
−=
=
−=
=
sM
sM
MMM
ss
De clase de teoría nosotros conocemos que:
( )[ ]
=
=
ααh
MMMMMh
MMMM
SS
T
·····'
'
··
123'
123
Tenemos que la matriz de transferencia es la siguiente:
;
2
3
40
1
502
3
120
1
01·
2
3
20
1
501
120
1
01·
10
501·
120
1
01·· 123
−−
−−=
−
−=
=
−
== MMMM T
La matriz solución del sistema es:
;
2
3
4040
1
'2
350·
40
'
2
3
40
'
2
3
10
1·
2
3
40
1
'2
350
40
'
2
3
10
1·
2
3
40
1
502
3
·10
'1··'
−−
+−
−+−=
=
−
−−
+−+−=
−
−−
−−
−==
s
ssss
sss
ssMMMM sTsSOL
Caso cuando s = 30 cm:
;
4
3
40
1
'4
35
40
'
2
3
2
3
4040
1
'2
350·
40
'
2
3
40
'
2
3
−−
+−+−=
−−
+−
−+−=
ss
s
ssss
M SOL

5
Como ha de verificarse que para cualquier ángulo debe cumplirse la igualdad
matricial:
cmsshs
shhh
3
20'0'
4
35·
4
3
40
1
'4
35
40
'
2
3
'
'·
'
'+=⇒=+−⇒
−−
+−+−=
⇒∀
=
ααα
αα
hhhhs
h3
4·
40
3
20
2
3'·
40
'
2
3' −=
+−=⇒
+−=
Caso cuando s = 20 cm:
;
140
1
'2040
'
2
3
2
3
4040
1
'2
350·
40
'
2
3
40
'
2
3
−−
+−+−=
−−
+−
−+−=
ss
s
ssss
M SOL
Como ha de verificarse que para cualquier ángulo debe cumplirse la igualdad
matricial:
cmsshs
shhh
20'0'20·
140
1
'2040
'
2
3
'
'·
'
'+=⇒=+−⇒
−−
+−+−=
⇒∀
=
ααα
αα
hhhhs
h −=
+−=⇒
+−= ·40
20
2
3'·
40
'
2
3'

BLOQUE I: INTRODUCCIÓN A LA ÓPTICA.
TEMA II: Sistema de visión humano.
2.1. Anatomía del ojo humano 1
2.1.1. Introducción 1
2.1.2. El ojo humano 1
2.1.3. El ojo como instrumento óptico 2
2.1.4. Anatomía de la retina: Conos y Bastones 3
2.1.5. Experimento: Sensibilidad espectral del ojo 4
2.1.6. Agudeza visual 5
2.1.7. La adaptación 7
2.2. Acomodación 8
2.3. Ametropías 9
2.4. Aberraciones en el ojo 10
2.5. Visión binocular 11
2.6. Visión de objetos en movimiento 13
2.7. Ilusiones ópticas 14
2.8. Bibliografía 17

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
1
2.1. Anatomía del ojo humano.
2.1.1. Introducción.
El conocimiento funcional del ojo es indispensable a un físico si se tiene en
cuenta que más del 80 % de la información, que el hombre recibe del mundo exterior a través de los sentidos, la obtiene a través del sentido de la vista. Además, son nociones necesarias para un ingeniero, y esta lección tiene como fin adentrarnos en el conocimiento de la anatomía del ojo pues las instalaciones que diseñemos deben estar correctamente iluminadas para facilitar al ojo a cumplir su misión.
Las cámaras fotográficas se diseñan con la intención de lograr imágenes de la mejor calidad, pero la calidad viene dada por la apreciación directa del ojo, por lo que no se han encontrado todavía características objetivas que por sí definan la mejor imagen. El conocimiento de las problemática del ojo y la visión es básico para el desarrollo de importantes ingenierías como son la ingeniería de la iluminación, la del color, la del diseño de instrumentos y cálculo de sistemas, la de visión artificial y la de robótica entre otras. 2.1.2. El ojo humano.
El globo ocular está alojado dentro de la órbita ciliar en la cara y sujeto por seis
músculos externos, que le proporcionan la movilidad de que dispone en su órbita. A su vez, el globo ocular está encerrado en una membrana dura y resistente denominada esclerótica (e) que le sirve de protección, y en su parte anterior existe una prominencia transparente denominada córnea (c).
Dentro de ella está otra membrana, la coroides (co) fuertemente vascularizada.
Su gran irrigación sanguínea proporciona alimento y calor a las demás partes del ojo. Esta membrana no está completamente cerrada y en su parte anterior tiene una expansión muscular, denominada músculo ciliar (m), con un orificio, el iris (i), que actúa como diafragma para la luz. El diámetro del iris es variable y su variación se produce por un acto involuntario que depende del flujo luminoso que penetra en el ojo. En altas luminosidades se cierra hasta un diámetro de 2 mm mientras que en visión nocturna se abre hasta 8 mm.
Dentro de la coroides y adosada a esta sin soldaduras, existe otra membrana
denominada retina (r), que se trata de un entramado nervioso formado por las células terminales de las fibras del nervio óptico, y que tiene en su parte posterior una pequeña depresión denominada fóvea (f) aproximadamente de 1.5 mm de diámetro. La cavidad interior del ojo está dividida en dos partes por un tabique muy tenue, hialoide (h). La cámara anterior está llena de un líquido transparente, el humor acuoso (ha), que es una dispersión de albúmina en agua salada caracterizada por ser fácilmente regenerable. En esta cámara, detrás del iris, está alojado el cristalino (cr) que se trata de una lente biconvexa, sujeta al músculo ciliar por un haz de fibras que lo envuelve a modo de saco y que se denomina zónula (z). La cámara posterior está ocupada por el humor vítreo (hv), que es un gel proteínico muy frágil. La presión interior del ojo mantiene tenso el globo ocular y la retina adosada a la coroides. La pérdida de esta presión por rotura de las cámaras, puede conducir al desprendimiento de la retina con graves consecuencias.

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
2
Figura 2.1. Anatomía del ojo humano.
Cuando se trata de ver con nitidez algún particular detalle de un objeto, el eje se
orienta por medio de los músculos externos de modo que la imagen del detalle a observar se sitúe sobre la fóvea. La línea que determina el centro de la fóvea y el punto nodal imagen es el eje visual, que forma con el eje óptico un ángulo de unos 5º.
2.1.3. El ojo como instrumento óptico.
El ojo se comporta de modo semejante a una cámara fotográfica cuyo objetivo
está constituido por la córnea y el cristalino, separados por el humor acuoso, siendo la retina la placa donde se forma la imagen y el iris es su diafragma de abertura. Pero la analogía no acaba aquí, pues al igual que en la cámara de fotos la imagen que se forma sobre la retina está invertida. Con todo, esto no supone ningún problema ya que el cerebro se encarga de darle la vuelta para que la veamos correctamente. Los datos medios estadísticos del ojo son los siguientes:
Córnea.- Cristalino.- nD = 1.376. nD, variable: 1.41 (núcleo), 1.37 (periferia). d = 0.5 mm. d = 3.1 mm. r1 = 7.7 mm y r2 = 6.8 mm. r1 = 10 mm y r2 = -6 mm, (en reposo). Poder refractor, 45 dioptrías. Potencia en aire, 18 dioptrías.
Humor Acuoso.- Humor Vítreo.- nD = 1.336. nD = 1.337. d = 3.1 mm.
Figura 2.2. Formación de la imagen en el ojo.

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
3
2.1.4. Anatomía de la retina: Conos y Bastones.
Dichos fotorreceptores se encuentran en la primera capa de neuronas de la retina
y se caracterizan por ser susceptibles a la luz (se componen de sustancias foto sensibles sobre las cuales actúa la luz como estímulo, provocando reacciones fotoquímicas que se traducen en estímulos eléctricos dirigidos al cerebro). Ésta células son de dos tipos: conos y bastones. Los conos, con la forma que indica su propio nombre son cortos y gruesos; los bastones, más largos y cilíndricos.
Figura 2.3. Concentraciones de fotorreceptores frente a la variación del ángulo.
Los conos y bastones se distribuyen por toda la retina, pero no con igual
densidad. En la zona central de la fóvea solamente hay conos y su densidad disminuye hacia el borde de la retina (en el centro hay un máximo de 150.000 unidades por mm2). La densidad de bastones crece a partir de la fóvea pasando por un máximo de 160.000 unidades por mm2 a unos 6 mm del centro.
Figura 2.4. Diagrama simple de la organización de la retina.
En general, se observa que los bastones se agrupan en baterías sobre una misma bipolar, mientras que los conos van a una sola bipolar o uno mismo a varias. Particularmente, en el centro de la fóvea cada cono conecta con una célula bipolar y una ganglionar.
Pigmento
epiteliano
Conos
Bastones
Membrana
delimitadora externa
Células Müller
Células
horizontales
Células
bipolares
Células
anacrinas
Células
ganglionares
Fibra de
nervio óptico
Membrana
delimitadora interna

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
4
2.1.5. Experimento: Sensibilidad espectral del ojo.
En un diedro pintado de blanco difusor D, se envía sobre una cara luz
monocromática de longitud de onda λ0 y, sobre la cara restante, luz de longitud de onda λ variable. El orificio de la pantalla P, permite al observador ver un campo circular dividido en dos regiones cada una de las cuales está iluminada por una sola de las luces.
Supongamos que de la luz λ0 mandamos
W0 W/m2 sobre la correspondiente cara del diedro y de la luz λ mandamos Wλ W/m2 sobre la cara restante. Dependiendo de estas irradiancias, el observador verá ambas regiones de diferente color y, además, las verá con distinta claridad (la claridad es la impresión subjetiva del nivel de luz y ésta se puede alcanzar independientemente del color, es decir, al iluminar una habitación con luz amarilla, esta misma claridad se puede obtener
empleando una luz roja, lo único que sucederá es que de ésta última tenemos que emplear mayor cantidad de energía).
Por tanto, si enviamos 100 W/m2 de λ0 = 530 nm y λ = 480 nm (Figura 2.5 a)
veremos la zona izquierda verde y la derecha azul (ésta última más oscura). Pero si enviamos 100 W/m2 de λ530 y 620 W/m2 λ480 (Figura 2.5 b), seguiremos viendo una verde y la otra azul pero igualmente claras. A la vista del experimento, podemos afirmar que la luz azul es menos eficiente que la verde y definiremos la eficiencia luminosa
relativa o factor de visibilidad, Vλ, de λ respecto λ0 por la expresión siguiente:
161,00 ==λ
λW
WV (1)
Fijando nuevos valores y repitiendo estas medidas más veces en todo el espectro
visible se obtiene una curva que se llama curva de sensibilidad espectral, donde se puede apreciar que en visión diurna el máximo ocurre a la longitud de onda λ = 555 nm.
A nivel industrial, este fenómeno nos revela que si una bombilla emite luz en la
zona en que el ojo es más sensible, requerirá menos energía y, por tanto, un bajo coste.
Figura 2.6. Curva de sensibilidad espectral
λ0 λ
λ0
λ
λ0
λ
Figura 2.5. Experimento.
(a) (b)

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
5
λ Vλ λ Vλ λ Vλ λ Vλ 400 0,0004 500 0,3230 600 0,6310 700 0,0041 410 0,0012 510 0,5030 610 0,5030 710 0,0021 420 0,0040 520 0,7100 620 0,3810 720 0,0010 430 0,0116 530 0,8620 630 0,2650 730 0,0005 440 0,0230 540 0,9540 640 0,1750 740 0,0003 450 0,0380 550 0,9950 650 0,1070 750 0,0001 460 0,0600 560 0,9950 660 0,0610 470 0,0910 570 0,9520 670 0,0320 480 0,1390 580 0,8700 680 0,0170 490 0,2080 590 0,7570 690 0,0082
Tabla 2.1. Valores de la curva de sensibilidad espectral.
Efecto Purkinje:
Si el experimento se repite para bajas luminosidades en visión escotópica, se
encuentra una curva análoga, pero desplazada hacia las ondas cortas. En bajas luminosidades las ondas cortas son más eficientes que las largas (fenómeno conocido como efecto Purkinje).
Teoría de la duplicidad:
El estudio de estos fenómenos ha conducido a la conclusión de que la retina
funciona con dos modalidades: retina diurna y retina nocturna.
• Retina diurna (visión fotópica): La función diurna se asigna a los conos como se desprende de que la visión diurna de detalles sea foveal. En la visión fotópica foveal, como cada cono se conecta a una fibra nerviosa (o incluso a más de una), dos señales que caigan sobre dos conos distintos, podemos pensar que se perciben separadas. Como consecuencia, hay que asignar a los conos la visión del color.
• Retina nocturna (visión escotópica): La función nocturna se asigna a los bastones como se desprende de que esta visión sea extrafoveal. En la visión escotópica, se ve borroso sin que se puedan apreciar detalles, lo cual tiene su explicación en que como los bastones se asocian a grandes grupos sobre una fibra nerviosa, toda la información recibida por una de estas colonias de bastones llega al cerebro como una única señal sin posibilidad de discriminación. Como consecuencia, hay que intuir que los bastones no perciben colores: «Por la noche, todos los gatos son pardos». 2.1.6. Agudeza visual.
Cuando el ojo trata de percibir detalles tiene sus limitaciones debido a dos
causas fundamentales, una de tipo físico por efecto de la difracción de la pupila y por las aberraciones, y otra de tipo fisiológico originada por la estructura discontinua de la retina.
Entre las tareas citadas, cabe señalar tres fundamentales: percepción de objetos de tamaño mínimo, habilidad para ver separados dos objetos muy próximos y el reconocimiento de formas.

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
6
Mínimo visible:
Podemos enfocar esta cuestión ciñéndonos a objetos tales como discos
circulares. Podemos diferenciar dos casos posibles:
Figura 2.7. Discos blancos / negros sobre fondos negros / blancos.
• Si se trata de determinar cuál es el diámetro mínimo que puede tener un disco
blanco sobre fondo negro para que sea percibida su existencia, encontramos que no hay límite. Aunque el disco sea lo más próximo a un punto teórico, a causa de la difracción tendríamos en la retina una mancha luminosa y, por muy pequeños que sean los objetos, siempre se percibirían con un tamaño mínimo que será aquel que correspondiese a un objeto cuya imagen geométrica en la retina fuera igual a la mancha de difracción de un punto luminoso teórico.
• Si se trata de detectar la existencia de un disco negro sobre un fondo claro, ya no
sucede igual puesto que por efecto de difracción en la pupila, aparece luz en el interior de su imagen geométrica. Dicha luz crece en su centro a medida que disminuye su diámetro y llega un momento en que por falta de contraste deja de percibirse la existencia del disco (el límite está en que el diámetro se vea bajo un ángulo de 25'').
A veces el ojo presenta una habilidad excepcional que le permite divisar los tendidos eléctricos sobre el cielo azul-claro a una distancia muy grande.
Mínimo separable:
Si presentamos al ojo dos puntos luminosos ampliamente separados y los vamos
acercando entre sí, llega un momento en que no se puede discernir si se trata de dos puntos o de uno sólo. Cuando la experiencia se lleva a cabo con barras de igual anchura alternativamente blancas y negras, en altas luminosidades y en las mejores condiciones se perciben separadas si su anchura subtiende como mínimo 38''.
Figura 2.8. (a) Miras de Foucault, (b) Problema de Nonius.
A veces, el ojo pone de manifiesto una habilidad excepcional ante algunos
problemas como al tratar de ver si dos trazos están alineados, pudiendo percibirse hasta una falta de alineación que se ve bajo un ángulo de 3''.
(a) (b)

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
7
Mínimo cognoscible:
Modernas investigaciones ponen de manifiesto que en la agudeza visual interviene con gran influencia las micro-fluctuaciones de la acomodación. El cristalino, accionado por la zónula modifica su estructura y su forma, incluso perdiendo su simetría de revolución de modo que favorezca la fluctuación visual.
En la determinación del mínimo cognoscible se suelen emplear letras y números para que sean reconocidos a diferentes distancias o presentando a la misma distancia diferentes tamaños.
!!!!!!!!!!Faltan fotos del test de las letras y números!!!!!!!!!!
2.1.7. La adaptación.
La adaptación es la facultad del ojo para ajustarse automáticamente a cambios en los niveles de iluminación. Se debe a la capacidad del iris para regular la abertura de la pupila y a cambios fotoquímicos en la retina. Para pasar de ambientes oscuros a luminosos el proceso es muy rápido pero en caso contrario es mucho más lento. Al cabo de un minuto se tiene una adaptación aceptable. A medida que pasa el tiempo, vemos mejor en la oscuridad y a la media hora ya vemos bastante bien. La adaptación completa se produce pasada una hora.
Figura 2.9. Gráficas de adaptación del ojo a la luz.
De la oscuridad a la luz
De la luz a la oscuridad
Completa
Ninguna
Ada
ptac
ión
Tiempo (minutos)
15 30 45 60 75

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
8
2.2. Acomodación.
El ojo humano es capaz de ver con nitidez a largas distancias (en reposo, la
imagen del plano del infinito se forma en la retina) y también objetos cercanos, lo que implica que no es un sistema rígido, sino que puede modificar su potencia de modo que objetos a diferentes distancias formen su imagen en la retina.
Este hecho se llama acomodación y su mecanismo consiste en la variación de la
convergencia del cristalino. Cuando se desea ver un objeto cercano, el músculo ciliar, a través de las fibras que lo unen al cristalino, actúa sobre éste abombándolo; cuando no actúa, su propia elasticidad lo devuelve al estado de reposo. La variación de la convergencia del cristalino se debe a los dos aspectos siguientes:
• Mecanismo geométrico: Variación de la curvatura del cristalino. • Mecanismo intercapsular: Variación del índice de refracción del cristalino.
El punto más cercano se denomina punto próximo y el más alejado punto
remoto. La siguiente expresión relaciona la amplitud de acomodación A con éstas distancias:
próximo punto del distanciaremoto punto deldistanciaA
11 −= (2)
Cuando las distancias se miden en metros, la amplitud de acomodación queda expresada en dioptrías.
Generalmente se considera que el punto remoto se encuentra en el infinito y que el punto próximo varía su posición con la edad. Un muchacho de 10 años tiene el punto próximo a – 0,07 m mientras que una persona durante la vejez puede ver con nitidez a – 250 mm.
dpAA 3.1407,0
11 =⇒−
−∞
= dpAA 425,0
11 =⇒−
−∞
=

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
9
2.3. Ametropías.
El ojo de convergencia normal u ojo emétrope, forma sin esfuerzo de
acomodación, la imagen del plano del infinito sobre su retina. El ojo que no tiene una convergencia normal se denomina amétrope. Podemos diferenciar entre varios tipos de problemas en el ojo: miopía, hipermetropía, vista cansada y astigmatismo.
Miopía: Un ojo excesivamente convergente se dice que es miope y sus puntos remoto y
próximo están más cerca de lo normal. Su miopía pude corregirse anteponiéndole una lente divergente con la potencia adecuada para que el punto próximo salga a su sitio, con lo cual el remoto también irá al infinito.
Hipermetropía: Un ojo que tiene poca convergencia se dice que es hipermétrope y su punto
próximo está más alejado de lo normal. La imagen del infinito se forma detrás de la retina dando lugar a una imagen retiniana virtual. Su hipermetropía puede corregirse anteponiéndole una lente convergente con la potencia adecuada para que el punto próximo salga a su sitio.
Vista cansada (presbicia): Este efecto suele aparecer debido a que, con la edad, el cristalino pierde
elasticidad, y con la rigidez pierde amplitud de acomodación. Esto provoca un alejamiento del punto próximo a pesar de que el remoto se mantenga en el infinito, pudiéndose corregir con vidrios convergentes (gafas de lectura).
Si la miopía no es aguda, la presbicia puede llegar a compensar la posición del
punto próximo. Esta es la razón por la cual, con la edad, algunos miopes pueden prescindir de usar gafas de lectura, pero no de gafas para ver de lejos.
Astigmatismo: Esta complicación aparece debida a que la córnea y las superficies del
cristalino han dejado de poseer simetría de revolución. En consecuencia, existe en el ojo humano un plano que contiene al eje para el cual la convergencia es máxima y otro perpendicular para el cual es mínima, lo que origina una doble imagen astigmática.
(a) (b) (c)
Figura 2.10. Problemas: (a) Ojo miope, (b) Ojo hipermétrope, (c) Astigmatismo.

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
10
2.4. Aberraciones en el ojo.
A pesar de que el ojo humano es un sistema óptico con fuertes aberraciones su
efecto no es excesivamente molesto. A continuación, analizaremos dos de las aberraciones más importantes: esférica y cromática. Aberración Esférica:
El ojo se comporta como un sistema subcorregido pues cuando la pupila está cerrada en altas luminosidades su efecto es relativamente despreciable. Cuando la pupila se abre hasta 5 mm la aberración esférica se hace mayor. Sin embargo, los rayos que penetran por el borde de la pupila tienen una eficiencia luminosa 5 veces menor que si entran por las proximidades del eje. En el peor de los casos, cuando la pupila está muy abierta, convierte al ojo en miope desplazando la imagen 0.25 dp. Aberración Cromática:
Debido a esta aberración los focos correspondientes a los colores violeta, amarillo y rojo se forman muy distanciados. A pesar de ello, esto tampoco se nota cuando se observa con luz blanca, pues el ojo enfoca sobre la imagen verde-amarilla para la cual tiene mayor sensibilidad.
Cuando más se recibe el efecto de la aberración cromática es al observar una tela de bandas y cuadros, unos rojos y otros azules. El ojo entra en rápidos movimientos de acomodación tratando de ver nítidas y simultáneamente las líneas de división por ambos lados, lo que es imposible y molesto.
(a) (b)
Figura 2.10. Aberraciones: (a) Aberración cromática; (b) Aberración esférica.
Foco de luz roja
Foco de luz azul
Luz blanca procedente
de un objeto lejano
Foco para un haz de rayos paraxial
Foco para un haz de rayos intermedio
Foco para un haz de rayos próximo al
borde
Luz blanca procedente de un objeto lejano

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
11
2.5. Visión binocular.
Cuando un objeto se observa con los dos ojos, en cada ojo se produce una
imagen con diferente perspectiva. Parecería lógico que se vieran dos imágenes. Sin embargo, no se ven dos imágenes sino que se ve una y con ello se tiene la sensación de
profundidad o vista 3-D.
La sensación de profundidad (capacidad de apreciar que un punto está más distante que otro) está ligada al ángulo que forman entre sí los ejes visuales de los dos ojos cuando se dirigen a dichos puntos. En promedio, se aprecia que P1 y P2 están a diferente distancia si la diferencia α1 – α2 es al menos de 30''. Por tanto, para mayores distancias que un punto para el cual los ejes visuales formen un ángulo de 30'' ya no se aprecia relieve.
Figura 2.11. Visión binocular: Límites de la sensación de profundidad.
La distancia media entre los centros de las pupilas de los ojos es unos 65 mm.
Teniendo en cuenta este resultado, la distancia máxima a partir de la cual no se puede apreciar la profundidad es unos 450 m. A pesar de ello el cerebro humano dispone de estrategias para la percepción de la visión en 3-D incluso a distancias mucho más lejanas. Ahora, veremos un ejemplo de ausencia de profundidad a partir de 450 m:
( ) "30"28.0"12.0"26.0·2
"12.0º10·25.3000.000.1
5,32
000.000.1
5,32
2
"26.0º10·22.7000.450
5,32
000.450
5,32
221
52
51
<=−=−⇒
⇒≈≈
=
⇒≈≈
=
−
−
ααα
α
arctg
arctg
Un ejemplo que existe en la naturaleza con respecto a la visión binocular es el
hecho de que los depredadores poseen los ojos juntos para poder medir distancias de forma precisa y óptima, mientras que las presas tienen los ojos separados para poder tener un mayor campo de visión para descubrir los diversos peligros que les acechan.
Cuando el ojo no puede percibir la profundidad emplea una serie de estrategias para conseguir ver en profundidad. Las estrategias son:
Interposición Situación que se da cuando un cuerpo tapa a otro más cercano. Sombras A través de las sombras de los objetos consigue percibir la
profundidad. Perspectiva lineal Objetos que aparecen juntos en alguna imagen dan más
sensación de lejanía que aquellos objetos pero separados (tamaños relativos y Gradiente de texturas).
x mm
32,5
mm
X + ∆x mm
2
'1α
2
'2α

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
12
(a)
(b) (c)
Figura 2.12. Ejemplos de Perspectiva lineal: (a) Gradiente de texturas; (b) Tamaños relativos; (c) Cercanía de objetos.
A A A A A

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
13
2.6. Visión de objetos en movimiento.
Cuando una fuente luminosa aparece y desaparece en un tiempo muy corto, al
observador siempre le parece que ha tenido una duración apreciable, del orden de 0,15 seg, lo que recibe el nombre de persistencia de las imágenes. La medida de persistencia puede hacerse imprimiendo a una fuente puntual de luz en movimiento circular, con lo cual, si la velocidad es suficiente, se verá una circunferencia de trazo continuo. Disminuyendo la velocidad se llega a una situación donde la continuidad se rompe, de la cual se puede deducir la persistencia.
Cuando dos imágenes idénticas aparecen sucesivamente en puntos próximos del
campo visual con intervalos de tiempo menores que el de persistencia, se tiene una sensación de que se trata de un solo objeto que se mueve de una posición a otra (en ello se funda la sensación de movimiento en el cine y en los anuncios luminosos).
Cuando se observa una fuente luminosa de luminancia fluctuante y periódica, si
la frecuencia es pequeña se observa un parpadeo, pero a partir de la frecuencia crítica se produce la "fusión" y aparece una luminancia constante igual a la media temporal tal y como viene definida mediante la ley de Talbot:
( )∫>=<t
dLt
L0
1 ττ (3)
La frecuencia crítica de fusión viene regida por la ley de Ferry-Porter:
bLafcf +><= ·log... (4)
Donde a y b son constantes que dependen de las condiciones de observación y
que hay que determinar experimentalmente en cada caso. Efecto estroboscópico:
Tiene lugar, por ejemplo, cuando la imagen de una rueda que vemos no es una imagen continua, sino que por alguna razón solo la visualizamos de una forma periódica. Ese es el caso de las películas de cine o de televisión.
Los fotogramas de la película se proyectan a razón de 24 por segundo. Si en ese 24avo de segundo la rueda ha girado de forma que los radios de la misma están muy cerca de la posición del fotograma anterior, pero un poco retrasados nos da la impresión de que gira hacia atrás. Si coincidieran en la misma posición nos parecería que la rueda está parada. Y si los radios quedan ligeramente adelantados entonces ya parece que gira hacía adelante, pero a lo mejor nos da la impresión de que gira lentamente. Incluso si el carro está acelerando o frenando se pasa por todas estas fases: Se las ve hacia adelante, se paran, retroceden...

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
14
2.7. Ilusiones ópticas.
¿Cuál cuadrado es mayor de ambos?
¿Qué círculo es más grande, el que está envuelto por círculos pequeños o grandes?
¿Qué hexágono estás viendo?
¿Qué recta es más larga?

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
15
¿Cuál de ambos segmentos tiene mayor longitud?
¿Ves el cuadrado o la otra figura?
¿Cuál animal ves, un dálmata o una hiena?

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
16
¿Qué ves, una copa o dos personas mirándose mutuamente?
¿Qué edad tiene esta mujer?

Tema 2 – Sistema de visión humano BLOQUE I: Introducción a la Óptica
Física de la Visión Jaime Martínez Verdú
17
2.8. Bibliografía.
Óptica. Justiniano Casas.
Óptica Fisiológica: Psicofísica de la visión. J. M. Ártigas, P. Capilla, A. Felipe, J. Pujol.

3.1. Magnitudes fotométricas y radiométricas.
Además de la frecuencia (y longitud de onda) ya señaladas, existen otras
magnitudes significativas en la radiación electromagnética, algunas especialmente importantes desde el punto de vista óptico. Estas magnitudes están relacionadas con la percepción que tenemos de la luz.
El ángulo sólido.
Para explicar el concepto de ángulo sólido ω pensemos en un punto O situado a una distancia r de una superficie S no necesariamente plana. Ahora, formemos un cono con vértice en O cuyas generatrices pasen por el contorno de S. A continuación, hagamos una esfera de radio uno con centro en O. Al área de la superficie de la esfera interceptada por el cono se la conoce por ángulo sólido y su valor es:
2r
S=ω
Su unidad es el estereorradián (sr). 3.1.1. Magnitudes radiométricas.
Flujo radiante. Las radiaciones electromagnéticas transportan energía, de forma que un objeto
luminoso (radiador) emite energía y cualquier objeto iluminado la recibe. La potencia
radiante o flujo radiante Fe es la medida de la cantidad de energía electromagnética que emite un radiador por unidad de tiempo. Se mide en Watt, vatios.
La energía transportada puede manifestarse de formas muy diversas en los
cuerpos que la reciben: propiciando reacciones químicas (fotosíntesis y bronceado), efectos eléctricos (fotocélulas), efectos mecánicos (viento solar), calentamiento (estufas de infrarrojos), etc.
Intensidad radiante (Ie). La intensidad radiante Ie expresa la energía emitida por un cuerpo radiante en
cada dirección del espacio. Se expresa en Watts/estereorradián (W/sr). Si el radiador emite por igual en todas direcciones y dado que una esfera tiene 4π estereorradianes, puede establecerse que un emisor cuyo flujo radiante sea Fe, produce en sus inmediaciones una intensidad radiante Ie = Fe / 4π Watt/sr.
ωd
dFI
sólidoÁngulo
emitidoFlujoI e
ee =⇒=
Figura 3.1. Ángulo sólido

Excitancia radiante (Me).
Los efectos de la radiación electromagnética se expresan mejor en término de la energía emitida (o recibida) por unidad de superficie en unidad de tiempo. En este sentido, más que el flujo radiante del emisor (que puede estar muy alejado) o la intensidad, interesa la densidad de radiación Me, que es el valor de la potencia radiante por unidad de superficie. Se expresa en W/m2.
dS
dFM
emisoraerfíciepSu
emitidoFlujoM e
ee =⇒=
Conocida la intensidad radiante Ie de un emisor, puede calcularse la densidad de su radiación Me a una distancia d:
2d
IM e
e =
Como puede verse, la densidad de radiación decrece rápidamente al alejarse del foco emisor (con el cuadrado de la distancia). Por esta razón, los planetas más alejados del Sol son comparativamente más fríos que los más próximos, y la "luz" de una linterna ilumina más intensamente los objetos próximos que los lejanos. Radiancia (Le). La radiancia de superficie dS en una dirección se define como cociente de la intensidad radiante en dicha dirección por el área aparente del elemento emisor, es decir, un área proyectada sobre un plano normal a la dirección considerada.
( )αcos' dS
I
dS
IL
aparenteerfíciepSu
radianteIntensidadL ee
ee ==⇒=
Irradiancia (Ee). Se define como cociente del flujo energético dFr que recibe en total y en todas las direcciones un área dS, dividido por el área receptora:
dS
dFE
receptoraerfíciepSu
recibidoFlujoE r
rr =⇒=
3.1.2. Magnitudes fotométricas.
Flujo luminoso. Para hacernos una primera idea consideraremos dos bombillas, una de 25 W y otra de 60 W. Está claro que la de 60 W dará una luz más intensa. Pues bien, esta es la idea: ¿cuál luce más? o dicho de otra forma ¿cuánto luce cada bombilla?

Cuando hablamos de 25 W o 60 W nos referimos sólo a la potencia consumida por la bombilla de la cual solo una parte se convierte en luz visible, es el llamado flujo luminoso. Podríamos medirlo en watts (W), pero parece más sencillo definir una nueva unidad, el lumen, que tome como referencia la radiación visible. Empíricamente se demuestra que a una radiación de 555 nm de 1 W de potencia emitida por un cuerpo negro le corresponden 683 lumen. Se define el flujo luminoso como la potencia (W) emitida en forma de radiación luminosa a la que el ojo humano es sensible. Su símbolo es φ y su unidad es el lumen (lm). A la relación entre watts y lúmenes se le llama equivalente luminoso de la
energía y equivale a:
λλφ VFe ·,=
1 watt-luz a 555 nm = 683 lm
Intensidad luminosa.
El flujo luminoso nos da una idea de la cantidad de luz que emite una fuente de luz, por ejemplo una bombilla, en todas las direcciones del espacio. Por contra, si pensamos en un proyector es fácil ver que sólo ilumina en una dirección. Parece claro que necesitamos conocer cómo se distribuye el flujo en cada dirección del espacio y para eso definimos la intensidad luminosa.
Diferencia entre flujo e intensidad luminosa.
Se conoce como intensidad luminosa al flujo luminoso emitido por unidad de ángulo sólido en una dirección concreta. Su símbolo es I y su unidad la candela (cd).

1
Para iluminar espacios carentes de luz es necesaria la presencia de fuentes de luz artificales, las lámparas, y aparatos que sirvan de soporte y distribuyan adecuadamente la luz, las luminarias. De esta forma es posible vencer las limitaciones que la naturaleza impone a las actividades humanas.
Lámparas incandescentes
Las lámparas incandescentes fueron la primera forma de producir luz a partir de la electricidad y surgieron a finales del siglo XIX. En la actualidad siguen siendo una de las formas más utilizadas de producir de luz, sobretodo en los ámbitos domésticos.
Lámparas de descarga. Conceptos
Principios de funcionamiento y características de estas lámparas que funcionan gracias al fenómeno de la luminiscencia.
Clases de lámparas de descarga
Tipos de lámparas de descarga según las características de los gases que las forman.
Luminarias
Definición y clasificaciones de las luminarias.

2
Las lámparas incandescentes fueron la primera forma de generar luz a partir de la energía
eléctrica. Desde que fueran inventadas, la tecnología ha cambiado mucho produciéndose
sustanciosos avances en la cantidad de luz producida, el consumo y la duración de las lámparas.
Su principio de funcionamiento es simple, se pasa una corriente eléctrica por un filamento hasta
que este alcanza una temperatura tan alta que emite radiaciones visibles por el ojo humano.
La incandescencia
Todos los cuerpos calientes emiten energía en forma de radiación electromagnética. Mientras
más alta sea su temperatura mayor será la energía emitida y la porción del espectro
electromagnético ocupado por las radiaciones emitidas. Si el cuerpo pasa la temperatura de
incandescencia una buena parte de estas radiaciones caerán en la zona visible del espectro y
obtendremos luz.
La incandescencia se puede obtener de dos maneras. La primera es por combustión de alguna
sustancia, ya sea sólida como una antorcha de madera, líquida como en una lámpara de aceite o
gaseosa como en las lámparas de gas. La segunda es pasando una corriente eléctrica a través de
un hilo conductor muy delgado como ocurre en las bombillas corrientes. Tanto de una forma
como de otra, obtenemos luz y calor (ya sea calentando las moléculas de aire o por radiaciones
infrarrojas). En general los rendimientos de este tipo de lámparas son bajos debido a que la
mayor parte de la energía consumida se convierte en calor.
Rendimiento de una lámpara incandescente
La producción de luz mediante la incandescencia tiene una ventaja adicional, y es que la luz
emitida contiene todas las longitudes de onda que forman la luz visible o dicho de otra manera,
su espectro de emisiones es continuo. De esta manera se garantiza una buena reproducción de
los colores de los objetos iluminados.

3
Características de una lámpara incandescente
Entre los parámetros que sirven para definir una lámpara tenemos las características
fotométricas: la intensidad luminosa, el flujo luminoso y el rendimiento o eficiencia. Además de
estas, existen otros que nos informan sobre la calidad de la reproducción de los colores y los
parámetros de duración de las lámparas.
Características cromáticas
Los colores que vemos con nuestros ojos dependen en gran medida de las características
cromáticas de las fuentes de luz. Por poner un ejemplo, no se ve igual una calle de noche a la luz
de las farolas iluminadas por lámparas de luz blanca que con lámparas de luz amarilla.
A la hora de describir las cualidades cromáticas de las fuentes de luz hemos de considerar dos
aspectos. El primero trata sobre el color que presenta la fuente. Y el segundo describe cómo son
reproducidos los colores de los objetos iluminados por esta. Para evaluarlos se utilizan dos
parámetros: la temperatura de color y el rendimiento de color que se mide con el IRC.
La temperatura de color hace referencia al color de la fuente luminosa. Su valor coincide con
la temperatura a la que un cuerpo negro tiene una apariencia de color similar a la de la fuente
considerada. Esto se debe a que sus espectros electromagnéticos respectivos tienen una
distribución espectral similar. Conviene aclarar que los conceptos temperatura de color y
temperatura de filamento son diferentes y no tienen porque coincidir sus valores.
El rendimiento en color, por contra, hace referencia a cómo se ven los colores de los objetos
iluminados. Nuestra experiencia nos indica que los objetos iluminados por un fluorescente no se
ven del mismo tono que aquellos iluminados por bombillas. En el primer caso destacan más los
tonos azules mientras que en el segundo lo hacen los rojos. Esto se debe a que la luz emitida por
cada una de estas lámparas tiene un alto porcentaje de radiaciones monocromáticas de color azul
o rojo.
Fuente de luz blanca. Fuente de luz monocromática.
Efecto del color de la fuente sobre el color de los objetos
Para establecer el rendimiento en color se utiliza el índice de rendimiento de color (IRC o Ra)
que compara la reproducción de una muestra de colores normalizada iluminada con nuestra
fuente con la reproducción de la misma muestra iluminada con una fuente patrón de referencia.
Características de duración
La duración de una lámpara viene determinada básicamente por la temperatura de trabajo del
filamento. Mientras más alta sea esta, mayor será el flujo luminoso pero también la velocidad de
evaporación del material que forma el filamento. Las partículas evaporadas, cuando entren en
contacto con las paredes se depositarán sobre estas, ennegreciendo la ampolla. De esta manera
se verá reducido el flujo luminoso por ensuciamiento de la ampolla. Pero, además, el filamento
se habrá vuelto más delgado por la evaporación del tungsteno que lo forma y se reducirá, en

4
consecuencia, la corriente eléctrica que pasa por él, la temperatura de trabajo y el flujo
luminoso. Esto seguirá ocurriendo hasta que finalmente se rompa el filamento. A este proceso
se le conoce como depreciación luminosa.
Para determinar la vida de una lámpara disponemos de diferentes parámetros según las
condiciones de uso definidas.
• La vida individual es el tiempo transcurrido en horas hasta que una lámpara se
estropea, trabajando en unas condiciones determinadas.
• La vida promedio es el tiempo transcurrido hasta que se produce el fallo de la mitad de
las lámparas de un lote representativo de una instalación, trabajando en unas
condiciones determinadas.
• La vida útil es el tiempo estimado en horas tras el cual es preferible sustituir un
conjunto de lámparas de una instalación a mantenerlas. Esto se hace por motivos
económicos y para evitar una disminución excesiva en los niveles de iluminación en la
instalación debido a la depreciación que sufre el flujo luminoso con el tiempo. Este
valor sirve para establecer los periodos de reposición de las lámparas de una instalación.
• La vida media es el tiempo medio que resulta tras el análisis y ensayo de un lote de
lámparas trabajando en unas condiciones determinadas.
La duración de las lámparas incandescentes está normalizada; siendo de unas 1000 horas para
las normales, para las halógenas es de 2000 horas para aplicaciones generales y de 4000 horas
para las especiales.
Factores externos que influyen en el funcionamiento de las lámparas
Los factores externos que afectan al funcionamiento de las lámparas son la temperatura del
entorno dónde esté situada la lámpara y las desviaciones en la tensión nominal en los bornes.
La temperatura ambiente no es un factor que influya demasiado en el funcionamiento de las
lámparas incandescentes, pero sí se ha de tener en cuenta para evitar deterioros en los materiales
empleados en su fabricación. En las lámparas normales hay que tener cuidado de que la
temperatura de funcionamiento no exceda de los 200º C para el casquillo y los 370º C para el
bulbo en el alumbrado general. Esto será de especial atención si la lámpara está alojada en
luminarias con mala ventilación. En el caso de las lámparas halógenas es necesario una
temperatura de funcionamiento mínima en el bulbo de 260º C para garantizar el ciclo
regenerador del wolframio. En este caso la máxima temperatura admisible en la ampolla es de
520º C para ampollas de vidrio duro y 900º C para el cuarzo.
Las variaciones de la tensión se producen cuando aplicamos a la lámpara una tensión diferente
de la tensión nominal para la que ha sido diseñada. Cuando aumentamos la tensión aplicada se
produce un incremento de la potencia consumida y del flujo emitido por la lámpara pero se
reduce la duración de la lámpara. Análogamente, al reducir la tensión se produce el efecto
contrario.

5
Efecto de las variaciones de tensión (%) sobre las características
de funcionamiento de las lámparas incandescentes
Partes de una lámpara
Las lámparas incandescentes están formadas por un hilo de wolframio que se calienta por efecto
Joule alcanzando temperaturas tan elevadas que empieza a emitir luz visible. Para evitar que el
filamento se queme en contacto con el aire, se rodea con una ampolla de vidrio a la que se le ha
hecho el vacío o se ha rellenado con un gas. El conjunto se completa con unos elementos con
funciones de soporte y conducción de la corriente eléctrica y un casquillo normalizado que sirve
para conectar la lámpara a la luminaria.
Ampolla | Filamento | Soporte | Gas de relleno
Vástago | Hilos conductores | Casquillo
Ampolla o bulbo
La ampolla es una cubierta de vidrio que da forma a la lámpara y protege el filamento del aire exterior evitando que se queme. Si no fuera así, el oxígeno del aire oxidaría el material del filamento destruyéndolo de forma inmediata.
Las ampollas pueden ser de vidrio transparente, de vidrio blanco translúcido o de colores proporcionando en este último caso una luz de color monocromática en lugar de la típica luz blanca.

6
Algunas formas típicas de ampollas
Filamento
Para que una lámpara incandescente emita luz visible, es necesario calentar el filamento hasta temperaturas muy elevadas. Esto se consigue pasando una corriente eléctrica a través de un material conductor por efecto Joule.
Como la temperatura depende de la resistencia eléctrica es necesario que esta última sea muy elevada. Para conseguirlo podemos actuar de dos formas. En primer lugar, que el filamento esté compuesto por un hilo muy largo y delgado; de esta manera los electrones tendrán más dificultad para pasar por el cable y aumentará la resistencia. Y la segunda posibilidad es emplear un material que tenga una resistividad eléctrica elevada.
También es muy importante que el filamento tenga un punto de fusión alto y una velocidad de evaporación lenta que evite un rápido desgaste por desintegración del hilo. De esta manera se pueden alcanzar temperaturas de funcionamiento más altas y, por tanto, mayores eficacias.
Para mejorar la eficacia luminosa de las lámparas se arrolla el filamento en forma de doble espiral. De esta manera se consigue que emitiendo la misma cantidad de luz, el filamento presente una menor superficie de intercambio de calor con el gas que rellena la ampolla, por lo que las pérdidas por este motivo se reducen al mínimo.
En la actualidad el material más empleado para los filamentos es el tungsteno o wolframio (W) por sus elevadas prestaciones que se ajustan a los requisitos exigidos además de ser una materia prima asequible.
Soporte del filamento: vástago, varillas de soporte e hilos conductores
El filamento está fijado a la lámpara por un conjunto de elementos que tienen misiones de sujeción y conducción de la electricidad.
Los hilos conductores transportan la electricidad desde el casquillo a los hilos de soporte a través del vástago. Para evitar el deterioro de las varillas de soporte es necesario un material, normalmente se usa el molibdeno, que aguante las altas temperaturas y no reaccione químicamente con el tungsteno del filamento.

7
El vástago es de vídrio con plomo, un material con excelentes propiedades de aislante eléctrico, que mantiene separada la corriente de los dos conductores que lo atraviesan. Además, y gracias a su interior hueco sirve para hacer el vacío en la ampolla y rellenarla de gas (cuando se requiera).
Gas de relleno
Aunque antiguamente se hacía el vacío en el interior de la ampolla, en la actualidad se rellena con un gas inerte por las ventajas que presenta. Con el gas se consigue reducir la evaporación del filamento e incrementar la temperatura de trabajo de la lámpara y el flujo luminoso emitido. Los gases más utilizados son el nitrógeno en pequeñas proporciones que evita la formación de arcos y el argón que reduce la velocidad de evaporación del material que forma el filamento. Las proporciones empleadas varían según la aplicación de la lámpara y la tensión de trabajo. Aumentando la presión del gas se consigue, además, disminuir la evaporación del filamento y aumentar la eficacia luminosa y vida de la lámpara.
Casquillo
El casquillo cumple dos importantes funciones en la lámpara. Por un lado, sirve para conectar el filamento a la corriente eléctrica proveniente del portalámparas. Y por el otro, permite la sujeción de la lámpara a la luminaria evitando su deterioro. En su fabricación se usan habitualmente el latón, el aluminio o el níquel.
Los casquillos empleados en alumbrado general son de dos tipos: Edison (E) y Bayoneta (B). Para su nomenclatura se utiliza la inicial de la clase seguida del diámetro en milímetros. Por ejemplo, E25 quiere decir que tenemos una lámpara con casquillo Edison de 25 mm de diámetro.
Casquillo de
rosca Casquillo de
bayoneta
Tipos de lámparas
Existen dos tipos de lámparas incandescentes: las que contienen un gas halógeno en su interior y
las que no lo contienen:
Lámparas no halógenas
Entre las lámparas incandescentes no halógenas podemos distinguir las que se han rellenado con
un gas inerte de aquellas en que se ha hecho el vacío en su interior. La presencia del gas supone
un notable incremento de la eficacia luminosa de la lámpara dificultando la evaporación del
material del filamento y permitiendo el aumento de la temperatura de trabajo del filamento. Las
lámparas incandescentes tienen una duración normalizada de 1000 horas, una potencia entre 25
y 2000 W y unas eficacias entre 7.5 y 11 lm/W para las lámparas de vacío y entre 10 y 20 para
las rellenas de gas inerte. En la actualidad predomina el uso de las lámparas con gas,
reduciéndose el uso de las de vacío a aplicaciones ocasionales en alumbrado general con
potencias de hasta 40 W.

8
Lámparas con gas
Lámparas de vacío
Temperatura del filamento 2500 ºC 2100 ºC
Eficacia luminosa de la lámpara 10-20 lm/W 7.5-11 lm/W
Duración 1000 horas 1000 horas
Pérdidas de calor Convección y radiación
Radiación
Lámparas halógenas de alta y baja tensión
En las lámparas incandescentes normales, con el paso del tiempo, se produce una disminución
significativa del flujo luminoso. Esto se debe, en parte, al ennegrecimiento de la ampolla por
culpa de la evaporación de partículas de wolframio del filamento y su posterior condensación
sobre la ampolla.
Agregando una pequeña cantidad de un compuesto gaseoso con halógenos (cloro, bromo o
yodo), normalmente se usa el CH2Br2, al gas de relleno se consigue establecer un ciclo de
regeneración del halógeno que evita el ennegrecimiento. Cuando el tungsteno (W) se evapora se
une al bromo formando el bromuro de wolframio (WBr2). Como las paredes de la ampolla están
muy calientes (más de 260 ºC) no se deposita sobre estas y permanece en estado gaseoso.
Cuando el bromuro de wolframio entra en contacto con el filamento, que está muy caliente, se
descompone en W que se deposita sobre el filamento y Br que pasa al gas de relleno. Y así, el
ciclo vuelve a empezar.
Ciclo del halógeno
El funcionamiento de este tipo de lámparas requiere de temperaturas muy altas para que pueda
realizarse el ciclo del halógeno. Por eso, son más pequeñas y compactas que las lámparas
normales y la ampolla se fabrica con un cristal especial de cuarzo que impide manipularla con
los dedos para evitar su deterioro.
Tienen una eficacia luminosa de 22 lm/W con una amplia gama de potencias de trabajo (150 a
2000W) según el uso al que estén destinadas. Las lámparas halógenas se utilizan normalmente
en alumbrado por proyección y cada vez más en iluminación doméstica.

9
Las lámparas de descarga constituyen una forma alternativa de producir luz de una manera más
eficiente y económica que las lámparas incandescentes. Por eso, su uso está tan extendido hoy
en día. La luz emitida se consigue por excitación de un gas sometido a descargas eléctricas entre
dos electrodos. Según el gas contenido en la lámpara y la presión a la que esté sometido
tendremos diferentes tipos de lámparas, cada una de ellas con sus propias características
luminosas.
Funcionamiento
En las lámparas de descarga, la luz se consigue estableciendo una corriente eléctrica entre dos
electrodos situados en un tubo lleno con un gas o vapor ionizado.
En el interior del tubo, se producen descargas eléctricas como consecuencia de la diferencia de
potencial entre los electrodos. Estas descargas provocan un flujo de electrones que atraviesa el
gas. Cuando uno de ellos choca con los electrones de las capas externas de los átomos les
transmite energía y pueden suceder dos cosas.
La primera posibilidad es que la energía transmitida en el choque sea lo suficientemente elevada
para poder arrancar al electrón de su orbital. Este, puede a su vez, chocar con los electrones de
otros átomos repitiendo el proceso. Si este proceso no se limita, se puede provocar la
destrucción de la lámpara por un exceso de corriente.
La otra posibilidad es que el electrón no reciba suficiente energía para ser arrancado. En este
caso, el electrón pasa a ocupar otro orbital de mayor energía. Este nuevo estado acostumbra a
ser inestable y rápidamente se vuelve a la situación inicial. Al hacerlo, el electrón libera la
energía extra en forma de radiación electromagnética, principalmente ultravioleta (UV) o
visible. Un electrón no puede tener un estado energético cualquiera, sino que sólo puede ocupar
unos pocos estados que vienen determinados por la estructura atómica del átomo. Como la
longitud de onda de la radiación emitida es proporcional a la diferencia de energía entre los
estados inicial y final del electrón y los estados posibles no son infinitos, es fácil comprender
que el espectro de estas lámparas sea discontinuo.

10
Relación entre los estados energéticos de los electrones y las franjas visibles en el espectro
La consecuencia de esto es que la luz emitida por la lámpara no es blanca (por ejemplo en las
lámparas de sodio a baja presión es amarillenta). Por lo tanto, la capacidad de reproducir los
colores de estas fuentes de luz es, en general, peor que en el caso de las lámparas incandescentes
que tienen un espectro continuo. Es posible, recubriendo el tubo con sustancias fluorescentes,
mejorar la reproducción de los colores y aumentar la eficacia de las lámparas convirtiendo las
nocivas emisiones ultravioletas en luz visible.
Elementos auxiliares
Para que las lámparas de descarga funcionen correctamente es necesario, en la mayoría de los
casos, la presencia de unos elementos auxiliares: cebadores y balastos. Los cebadores o
ignitores son dispositivos que suministran un breve pico de tensión entre los electrodos del
tubo, necesario para iniciar la descarga y vencer así la resistencia inicial del gas a la corriente
eléctrica. Tras el encendido, continua un periodo transitorio durante el cual el gas se estabiliza y
que se caracteriza por un consumo de potencia superior al nominal.
Los balastos, por contra, son dispositivos que sirven para limitar la corriente que atraviesa la
lámpara y evitar así un exceso de electrones circulando por el gas que aumentaría el valor de la
corriente hasta producir la destrucción de la lámpara.
Eficacia
Al establecer la eficacia de este tipo de lámparas hay que diferenciar entre la eficacia de la
fuente de luz y la de los elementos auxiliares necesarios para su funcionamiento que depende
del fabricante. En las lámparas, las pérdidas se centran en dos aspectos: las pérdidas por calor y
las pérdidas por radiaciones no visibles (ultravioleta e infrarrojo). El porcentaje de cada tipo
dependerá de la clase de lámpara con que trabajemos.

11
Balance energético de una lámpara de descarga
La eficacia de las lámparas de descarga oscila entre los 19-28 lm/W de las lámparas de luz de
mezcla y los 100-183 lm/W de las de sodio a baja presión.
Tipo de lámpara Eficacia sin balasto (lm/W)
Fluorescentes 38-91
Luz de mezcla 19-28
Mercurio a alta presión
40-63
Halogenuros metálicos
75-95
Sodio a baja presión 100-183
Sodio a alta presión 70-130
Características cromáticas
Debido a la forma discontinua del espectro de estas lámparas, la luz emitida es una mezcla de
unas pocas radiaciones monocromáticas; en su mayor parte en la zona ultravioleta (UV) o
visible del espectro. Esto hace que la reproducción del color no sea muy buena y su rendimiento
en color tampoco.
Ejemplo de espectro de una lámpara de descarga
Para solucionar este problema podemos tratar de completar el espectro con radiaciones de
longitudes de onda distintas a las de la lámpara. La primera opción es combinar en una misma
lámpara dos fuentes de luz con espectros que se complementen como ocurre en las lámparas de
luz de mezcla (incandescencia y descarga). También podemos aumentar la presión del gas. De
esta manera se consigue aumentar la anchura de las líneas del espectro de manera que formen
bandas anchas y más próximas entre sí. Otra solución es añadir sustancias sólidas al gas, que al

12
vaporizarse emitan radiaciones monocromáticas complementarias. Por último, podemos recubrir
la pared interna del tubo con una sustancias fluorescente que conviertan los rayos ultravioletas
en radiaciones visibles.
Características de duración
Hay dos aspectos básicos que afectan a la duración de las lámparas. El primero es la
depreciación del flujo. Este se produce por ennegrecimiento de la superficie de la superficie del
tubo donde se va depositando el material emisor de electrones que recubre los electrodos. En
aquellas lámparas que usan sustancias fluorescentes otro factor es la perdida gradual de la
eficacia de estas sustancias.
El segundo es el deterioro de los componentes de la lámpara que se debe a la degradación de los
electrodos por agotamiento del material emisor que los recubre. Otras causas son un cambio
gradual de la composición del gas de relleno y las fugas de gas en lámparas a alta presión.
Tipo de lámpara Vida promedio (h)
Fluorescente estándar 12500
Luz de mezcla 9000
Mercurio a alta presión 25000
Halogenuros metálicos 11000
Sodio a baja presión 23000
Sodio a alta presión 23000
Factores externos que influyen en el funcionamiento
Los factores externos que más influyen en el funcionamiento de la lámpara son la temperatura
ambiente y la influencia del número de encendidos.
Las lámparas de descarga son, en general, sensibles a las temperaturas exteriores. Dependiendo
de sus características de construcción (tubo desnudo, ampolla exterior...) se verán más o menos
afectadas en diferente medida. Las lámparas a alta presión, por ejemplo, son sensibles a las
bajas temperaturas en que tienen problemas de arranque. Por contra, la temperatura de trabajo
estará limitada por las características térmicas de los componentes (200º C para el casquillo y
entre 350º y 520º C para la ampolla según el material y tipo de lámpara).
La influencia del número de encendidos es muy importante para establecer la duración de una
lámpara de descarga ya que el deterioro de la sustancia emisora de los electrodos depende en
gran medida de este factor.
Partes de una lámpara
Las formas de las lámparas de descarga varían según la clase de lámpara con que tratemos. De
todas maneras, todas tienen una serie de elementos en común como el tubo de descarga, los
electrodos, la ampolla exterior o el casquillo.

13
Principales partes de una lámpara de descarga
Ampolla | Tubo de descarga | Electrodos | Casquillo | Gas
Ampolla exterior
La ampolla es un elemento que sirve para proteger al tubo de descarga de los agentes atmosféricos. Es un elemento presente en todas las lámparas excepto en las lámparas fluorescentes que no disponen de él. En su interior se hace el vacío o se rellena con un gas inerte. Sus formas son muy variadas y puede estar recubierta internamente con sustancias fluorescentes que filtran y convierten las radiaciones ultravioletas en visibles mejorando el rendimiento en color de estas lámparas y su eficiencia.
Tubo de descarga
Es un tubo, normalmente de forma cilíndrica, donde se producen las descargas eléctricas entre los electrodos. Está relleno con un gas (vapor de mercurio o sodio habitualmente) a alta o baja presión que determina las propiedades de la lámpara. En las lámparas fluorescentes se recubre la cara interna con sustancias fluorescentes que convierten las emisiones ultravioletas en luz visible. Los materiales que se emplean en su fabricación dependen del tipo de lámpara y de las condiciones de uso.
Electrodos
Los electrodos son los elementos responsables de la descarga eléctrica en el tubo. Están hechos de wolframio y se conectan a la corriente a través del casquillo. Se recubren con una sustancia emisora para facilitar la emisión de los electrones en el tubo.
Casquillo
El casquillo tiene la función de conectar los electrodos a la red a través del portalámparas. Puede ser de rosca o bayoneta aunque hay algunas lámparas como las fluorescentes que disponen de casquillos de espigas con dos contactos en los extremos del tubo. Los materiales de que se elaboran dependerán de los requisitos térmicos y mecánicos de cada tipo de lámpara.

14
Gas
En el interior del tubo de descarga encontramos una mezcla entre un vapor de sodio o mercurio y un gas inerte de relleno. El primero determina las propiedades de la luz de la lámpara y es el responsable de la emisión de la luz como consecuencia de la descarga. El segundo, el gas inerte, cumple varias funciones. La principal es disminuir la tensión de ruptura necesaria para ionizar el gas que rellena el tubo e iniciar así la descarga más fácilmente. Otras funciones que realiza son limitar la corriente de electrones y servir de aislante térmico para ayudar a mantener la temperatura de trabajo de la lámpara.

15
Las lámparas de descarga se pueden clasificar según el gas utilizado (vapor de mercurio o
sodio) o la presión a la que este se encuentre (alta o baja presión). Las propiedades varían
mucho de unas a otras y esto las hace adecuadas para unos usos u otros.
• Lámparas de vapor de mercurio: o Baja presión:
Lámparas fluorescentes o Alta presión:
Lámparas de vapor de mercurio a alta presión Lámparas de luz de mezcla Lámparas con halogenuros metálicos
• Lámparas de vapor de sodio: o Lámparas de vapor de sodio a baja presión o Lámparas de vapor de sodio a alta presión
Lámparas de vapor de mercurio
Lámparas fluorescentes
Las lámparas fluorescentes son lámparas de vapor de mercurio a baja presión (0.8 Pa). En estas
condiciones, en el espectro de emisión del mercurio predominan las radiaciones ultravioletas en
la banda de 253.7 nm. Para que estas radiaciones sean útiles, se recubren las paredes interiores
del tubo con polvos fluorescentes que convierten los rayos ultravioletas en radiaciones visibles.
De la composición de estas sustancias dependerán la cantidad y calidad de la luz, y las
cualidades cromáticas de la lámpara. En la actualidad se usan dos tipos de polvos; los que
producen un espectro continuo y los trifósforos que emiten un espectro de tres bandas con los
colores primarios. De la combinación estos tres colores se obtiene una luz blanca que ofrece un
buen rendimiento de color sin penalizar la eficiencia como ocurre en el caso del espectro
continuo.
Lámpara fluorescente
Las lámparas fluorescentes se caracterizan por carecer de ampolla exterior. Están formadas por
un tubo de diámetro normalizado, normalmente cilíndrico, cerrado en cada extremo con un
casquillo de dos contactos donde se alojan los electrodos. El tubo de descarga está relleno con
vapor de mercurio a baja presión y una pequeña cantidad de un gas inerte que sirve para facilitar
el encendido y controlar la descarga de electrones.
La eficacia de estas lámparas depende de muchos factores: potencia de la lámpara, tipo y
presión del gas de relleno, propiedades de la sustancia fluorescente que recubre el tubo,

16
temperatura ambiente... Esta última es muy importante porque determina la presión del gas y en
último término el flujo de la lámpara. La eficacia oscila entre los 38 y 91 lm/W dependiendo de
las características de cada lámpara.
Balance energético de una lámpara fluorescente
La duración de estas lámparas se sitúa entre 5000 y 7000 horas. Su vida termina cuando el
desgaste sufrido por la sustancia emisora que recubre los electrodos, hecho que se incrementa
con el número de encendidos, impide el encendido al necesitarse una tensión de ruptura superior
a la suministrada por la red. Además de esto, hemos de considerar la depreciación del flujo
provocada por la pérdida de eficacia de los polvos fluorescentes y el ennegrecimiento de las
paredes del tubo donde se deposita la sustancia emisora.
El rendimiento en color de estas lámparas varía de moderado a excelente según las sustancias
fluorescentes empleadas. Para las lámparas destinadas a usos habituales que no requieran de
gran precisión su valor está entre 80 y 90. De igual forma la apariencia y la temperatura de color
varía según las características concretas de cada lámpara.
Apariencia de color Tcolor (K)
Blanco cálido 3000
Blanco 3500
Natural 4000
Blanco frío 4200
Luz día 6500
Las lámparas fluorescentes necesitan para su funcionamiento la presencia de elementos
auxiliares. Para limitar la corriente que atraviesa el tubo de descarga utilizan el balasto y para el
encendido existen varias posibilidades que se pueden resumir en arranque con cebador o sin él.
En el primer caso, el cebador se utiliza para calentar los electrodos antes de someterlos a la
tensión de arranque. En el segundo caso tenemos las lámparas de arranque rápido en las que se
calientan continuamente los electrodos y las de arranque instantáneo en que la ignición se
consigue aplicando una tensión elevada.
Más modernamente han aparecido las lámparas fluorescentes compactas que llevan incorporado
el balasto y el cebador. Son lámparas pequeñas con casquillo de rosca o bayoneta pensadas para
sustituir a las lámparas incandescentes con ahorros de hasta el 70% de energía y unas buenas
prestaciones.
Lámparas de vapor de mercurio a alta presión
A medida que aumentamos la presión del vapor de mercurio en el interior del tubo de descarga,
la radiación ultravioleta característica de la lámpara a baja presión pierde importancia respecto a

17
las emisiones en la zona visible (violeta de 404.7 nm, azul 435.8 nm, verde 546.1 nm y amarillo
579 nm).
Espectro de emisión sin corregir
En estas condiciones la luz emitida, de color azul verdoso, no contiene radiaciones rojas. Para
resolver este problema se acostumbra a añadir sustancias fluorescentes que emitan en esta zona
del espectro. De esta manera se mejoran las características cromáticas de la lámpara. La
temperatura de color se mueve entre 3500 y 4500 K con índices de rendimiento en color de 40 a
45 normalmente. La vida útil, teniendo en cuenta la depreciación se establece en unas 8000
horas. La eficacia oscila entre 40 y 60 lm/W y aumenta con la potencia, aunque para una misma
potencia es posible incrementar la eficacia añadiendo un recubrimiento de polvos fosforescentes
que conviertan la luz ultravioleta en visible.
Balance energético de una lámpara de mercurio a alta presión
Los modelo más habituales de estas lámparas tienen una tensión de encendido entre 150 y 180
V que permite conectarlas a la red de 220 V sin necesidad de elementos auxiliares. Para
encenderlas se recurre a un electrodo auxiliar próximo a uno de los electrodos principales que
ioniza el gas inerte contenido en el tubo y facilita el inicio de la descarga entre los electrodos
principales. A continuación se inicia un periodo transitorio de unos cuatro minutos,
caracterizado porque la luz pasa de un tono violeta a blanco azulado, en el que se produce la
vaporización del mercurio y un incremento progresivo de la presión del vapor y el flujo
luminoso hasta alcanzar los valores normales. Si en estos momentos se apagara la lámpara no
sería posible su reencendido hasta que se enfriara, puesto que la alta presión del mercurio haría
necesaria una tensión de ruptura muy alta.

18
Lámpara de mercurio a alta presión
Lámparas de luz de mezcla
Las lámparas de luz de mezcla son una combinación de una lámpara de mercurio a alta presión
con una lámpara incandescente y , habitualmente, un recubrimiento fosforescente. El resultado
de esta mezcla es la superposición, al espectro del mercurio, del espectro continuo característico
de la lámpara incandescente y las radiaciones rojas provenientes de la fosforescencia.
Espectro de emisión de una lámpara de luz de mezcla
Su eficacia se sitúa entre 20 y 60 lm/W y es el resultado de la combinación de la eficacia de una
lámpara incandescente con la de una lámpara de descarga. Estas lámparas ofrecen una buena
reproducción del color con un rendimiento en color de 60 y una temperatura de color de 3600 K.
La duración viene limitada por el tiempo de vida del filamento que es la principal causa de fallo.
Respecto a la depreciación del flujo hay que considerar dos causas. Por un lado tenemos el
ennegrecimiento de la ampolla por culpa del wolframio evaporado y por otro la pérdida de
eficacia de los polvos fosforescentes. En general, la vida media se sitúa en torno a las 6000
horas.

19
Lámpara de luz de mezcla
Una particularidad de estas lámparas es que no necesitan balasto ya que el propio filamento
actúa como estabilizador de la corriente. Esto las hace adecuadas para sustituir las lámparas
incandescentes sin necesidad de modificar las instalaciones.
Lámparas con halogenuros metálicos
Si añadimos en el tubo de descarga yoduros metálicos (sodio, talio, indio...) se consigue mejorar
considerablemente la capacidad de reproducir el color de la lámpara de vapor de mercurio. Cada
una de estas sustancias aporta nuevas líneas al espectro (por ejemplo amarillo el sodio, verde el
talio y rojo y azul el indio).
Espectro de emisión de una lámpara con halogenuros metálicos
Los resultados de estas aportaciones son una temperatura de color de 3000 a 6000 K
dependiendo de los yoduros añadidos y un rendimiento del color de entre 65 y 85. La eficiencia
de estas lámparas ronda entre los 60 y 96 lm/W y su vida media es de unas 10000 horas. Tienen
un periodo de encendido de unos diez minutos, que es el tiempo necesario hasta que se
estabiliza la descarga. Para su funcionamiento es necesario un dispositivo especial de
encendido, puesto que las tensiones de arranque son muy elevadas (1500-5000 V).

20
Lámpara con halogenuros metálicos
Las excelentes prestaciones cromáticas la hacen adecuada entre otras para la iluminación de
instalaciones deportivas, para retransmisiones de TV, estudios de cine, proyectores, etc.
Lámparas de vapor de sodio
Lámparas de vapor de sodio a baja presión
La descarga eléctrica en un tubo con vapor de sodio a baja presión produce una radiación
monocromática característica formada por dos rayas en el espectro (589 nm y 589.6 nm) muy
próximas entre sí.
Espectro de una lámpara de vapor de sodio a baja presión
La radiación emitida, de color amarillo, está muy próxima al máximo de sensibilidad del ojo
humano (555 nm). Por ello, la eficacia de estas lámparas es muy elevada (entre 160 y 180
lm/W). Otras ventajas que ofrece es que permite una gran comodidad y agudeza visual, además
de una buena percepción de contrastes. Por contra, su monocromatismo hace que la
reproducción de colores y el rendimiento en color sean muy malos haciendo imposible
distinguir los colores de los objetos.

21
Balance energético de una lámpara de vapor de sodio a baja presión
La vida media de estas lámparas es muy elevada, de unas 15000 horas y la depreciación de flujo
luminoso que sufren a lo largo de su vida es muy baja por lo que su vida útil es de entre 6000 y
8000 horas. Esto junto a su alta eficiencia y las ventajas visuales que ofrece la hacen muy
adecuada para usos de alumbrado público, aunque también se utiliza con finalidades
decorativas. En cuanto al final de su vida útil, este se produce por agotamiento de la sustancia
emisora de electrones como ocurre en otras lámparas de descarga. Aunque también se puede
producir por deterioro del tubo de descarga o de la ampolla exterior.
Lámpara de vapor de sodio a baja presión
En estas lámparas el tubo de descarga tiene forma de U para disminuir las pérdidas por calor y
reducir el tamaño de la lámpara. Está elaborado de materiales muy resistentes pues el sodio es
muy corrosivo y se le practican unas pequeñas hendiduras para facilitar la concentración del
sodio y que se vaporice a la temperatura menor posible. El tubo está encerrado en una ampolla
en la que se ha practicado el vacío con objeto de aumentar el aislamiento térmico. De esta
manera se ayuda a mantener la elevada temperatura de funcionamiento necesaria en la pared del
tubo (270 ºC).
El tiempo de arranque de una lámpara de este tipo es de unos diez minutos. Es el tiempo
necesario desde que se inicia la descarga en el tubo en una mezcla de gases inertes (neón y
argón) hasta que se vaporiza todo el sodio y comienza a emitir luz. Físicamente esto se
corresponde a pasar de una luz roja (propia del neón) a la amarilla característica del sodio. Se
procede así para reducir la tensión de encendido.
Lámparas de vapor de sodio a alta presión
Las lámparas de vapor de sodio a alta presión tienen una distribución espectral que abarca casi
todo el espectro visible proporcionando una luz blanca dorada mucho más agradable que la
proporcionada por las lámparas de baja presión.

22
Espectro de una lámpara de vapor de sodio a alta presión
Las consecuencias de esto es que tienen un rendimiento en color (Tcolor= 2100 K) y capacidad
para reproducir los colores mucho mejores que la de las lámparas a baja presión (IRC = 25,
aunque hay modelos de 65 y 80 ). No obstante, esto se consigue a base de sacrificar eficacia;
aunque su valor que ronda los 130 lm/W sigue siendo un valor alto comparado con los de otros
tipos de lámparas.
Balance energético de una lámpara de vapor de sodio a alta presión
La vida media de este tipo de lámparas ronda las 20000 horas y su vida útil entre 8000 y 12000
horas. Entre las causas que limitan la duración de la lámpara, además de mencionar la
depreciación del flujo tenemos que hablar del fallo por fugas en el tubo de descarga y del
incremento progresivo de la tensión de encendido necesaria hasta niveles que impiden su
correcto funcionamiento.
Las condiciones de funcionamiento son muy exigentes debido a las altas temperaturas (1000
ºC), la presión y las agresiones químicas producidas por el sodio que debe soportar el tubo de
descarga. En su interior hay una mezcla de sodio, vapor de mercurio que actúa como
amortiguador de la descarga y xenón que sirve para facilitar el arranque y reducir las pérdidas
térmicas. El tubo está rodeado por una ampolla en la que se ha hecho el vacío. La tensión de
encendido de estas lámparas es muy elevada y su tiempo de arranque es muy breve.

23
Lámpara de vapor de sodio a alta presión
Este tipo de lámparas tienen muchos usos posibles tanto en iluminación de interiores como de
exteriores. Algunos ejemplos son en iluminación de naves industriales, alumbrado público o
iluminación decorativa.

24
Las luminarias son aparatos que sirven de soporte y conexión a la red eléctrica a las lámparas.
Como esto no basta para que cumplan eficientemente su función, es necesario que cumplan una
serie de características ópticas, mecánicas y eléctricas entre otras.
A nivel de óptica, la luminaria es responsable del control y la distribución de la luz emitida por
la lámpara. Es importante, pues, que en el diseño de su sistema óptico se cuide la forma y
distribución de la luz, el rendimiento del conjunto lámpara-luminaria y el deslumbramiento que
pueda provocar en los usuarios. Otros requisitos que debe cumplir las luminarias es que sean de
fácil instalación y mantenimiento. Para ello, los materiales empleados en su construcción han de
ser los adecuados para resistir el ambiente en que deba trabajar la luminaria y mantener la
temperatura de la lámpara dentro de los límites de funcionamiento. Todo esto sin perder de vista
aspectos no menos importantes como la economía o la estética.
Clasificación
Las luminarias pueden clasificarse de muchas maneras aunque lo más común es utilizar criterios
ópticos, mecánicos o eléctricos.
Clasificación según las características ópticas de la lámpara
Una primera manera de clasificar las luminarias es según el porcentaje del flujo luminoso
emitido por encima y por debajo del plano horizontal que atraviesa la lámpara. Es decir,
dependiendo de la cantidad de luz que ilumine hacia el techo o al suelo. Según esta clasificación
se distinguen seis clases.
Directa
Semi-directa
General difusa
Directa-indirecta

25
Semi-directa
Indirecta
Clasificación CIE según la distribución de la luz
Otra clasificación posible es atendiendo al número de planos de simetría que tenga el sólido
fotométrico. Así, podemos tener luminarias con simetría de revolución que tienen infinitos
planos de simetría y por tanto nos basta con uno de ellos para conocer lo que pasa en el resto de
planos (por ejemplo un proyector o una lámpara tipo globo), con dos planos de simetría
(transversal y longitudinal) como los fluorescentes y con un plano de simetría (el longitudinal)
como ocurre en las luminarias de alumbrado viario.
Luminaria con infinitos planos de simetría
Luminaria con dos planos de simetría
Luminaria con un plano de simetría
Para las luminarias destinadas al alumbrado público se utilizan otras clasificaciones.
Clasificación según las características mecánicas de la lámpara
Las luminarias se clasifican según el grado de protección contra el polvo, los líquidos y los
golpes. En estas clasificaciones, según las normas nacionales (UNE 20324) e internacionales,
las luminarias se designan por las letras IP seguidas de tres dígitos. El primer número va de 0
(sin protección) a 6 (máxima protección) e indica la protección contra la entrada de polvo y
cuerpos sólidos en la luminaria. El segundo va de 0 a 8 e indica el grado de protección contra la
penetración de líquidos. Por último, el tercero da el grado de resistencia a los choques.
Clasificación según las características eléctricas de la lámpara

26
Según el grado de protección eléctrica que ofrezcan las luminarias se dividen en cuatro clases
(0, I, II, III).
Clase Protección eléctrica
0 Aislamiento normal sin toma de tierra
I Aislamiento normal y toma de tierra
II Doble aislamiento sin toma de tierra.
III Luminarias para conectar a circuitos de muy baja tensión, sin otros circuitos internos o externos que operen a otras tensiones distintas a la mencionada.
Otras clasificaciones
Otras clasificaciones posibles son según la aplicación a la que esté destinada la luminaria
(alumbrado viario, alumbrado peatonal, proyección, industrial, comercial, oficinas, doméstico...)
o según el tipo de lámparas empleado (para lámparas incandescentes o fluorescentes).

1
Contrariamente a lo que se pueda pensar, detrás de los cálculos y recomendaciones sobre alumbrado de vías públicas existe un importante desarrollo teórico sobre diferentes temas (pavimentos, deslumbramiento, confort visual, etc.). Afortunadamente, hoy día estos cálculos están muy mecanizados y no es necesario tener profundos conocimientos en la materia para realizarlos. No obstante, es recomendable tener nociones de algunos de ellos para comprender mejor la mecánica de cálculo. Así tras estudiar algunos conceptos previos de iluminación, veremos soluciones prácticas de alumbrado viario y los niveles de iluminación recomendados.
Iluminancia
La iluminancia indica la cantidad de luz que llega a una superficie y se define como el flujo luminoso recibido por unidad de superficie:
Si la expresamos en función de la intensidad luminosa nos queda como:
donde I es la intensidad recibida por el punto P en la dirección definida por el par de ángulos (C, ) y h la altura del foco luminoso. Si el punto está iluminado por más de una lámpara, la iluminancia total recibida es entonces:
Luminancia
La luminancia, por contra, es una medida de la luz que llega a los ojos procedente de los objetos y es la responsable de excitar la retina provocando la visión. Esta luz proviene de la reflexión que sufre la iluminancia cuando incide sobre los cuerpos. Se puede definir, pues, como la porción de intensidad luminosa por unidad de superficie que es reflejada por la calzada en dirección al ojo.

2
L = q( , ) · EH
donde q es el coeficiente de luminancia en el punto P que depende básicamente del ángulo de incidencia y del ángulo entre el plano de incidencia y el de observación . El efecto del ángulo de observación es despreciable para la mayoría de conductores (automovilistas con campo visual entre 60 y 160 m por delante y una altura de 1,5 m sobre el suelo) y no se tiene en cuenta. Así pues, nos queda:
Por comodidad de cálculo, se define el termino:
Quedando finalmente:
Y si el punto está iluminado por más de una lámpara, resulta:
Los valores de r( , ) se encuentran tabulados o incorporados a programas de cálculo y dependen de las características de los pavimentos utilizados en la vía.
Criterios de calidad
Para determinar si una instalación es adecuada y cumple con todos los requisitos de seguridad y visibilidad necesarios se establecen una serie de parámetros que sirven como criterios de calidad. Son la luminancia media (Lm, LAV), los coeficientes de uniformidad (U0, UL), el deslumbramiento (TI y G) y el coeficiente de iluminación de los alrededores (SR).
Coeficientes de uniformidad

3
Como criterios de calidad y evaluación de la uniformidad de la iluminación en la vía se analizan el rendimiento visual en términos del coeficiente global de uniformidad U0 y la comodidad visual mediante el coeficiente longitudinal de uniformidad UL (medido a lo largo de la línea central).
U0 = Lmin / Lm UL = Lmin / Lmax
Deslumbramiento
El deslumbramiento producido por las farolas o los reflejos en la calzada, es un problema considerable por sus posibles repercusiones. En sí mismo, no es más que una sensación molesta que dificulta la visión pudiendo, en casos extremos, llegar a provocar ceguera transitoria. Se hace necesario, por tanto, cuantificar este fenómeno y establecer unos criterios de calidad que eviten estas situaciones peligrosas para los usuarios.
Se llama deslumbramiento molesto a aquella sensación desagradable que sufrimos cuando la luz que llega a nuestros ojos es demasiado intensa. Este fenómeno se evalúa de acuerdo a una escala numérica, obtenida de estudios estadísticos, que va del deslumbramiento insoportable al inapreciable.
G Deslumbramiento Evaluación del alumbrado
1 Insoportable Malo
3 Molesto Inadecuado
5 Admisible Regular
7 Satisfactorio Bueno
9 Inapreciable Excelente
Donde la fórmula de G se calcula a partir de características de la luminaria y la instalación.
Actualmente no se utiliza mucho porque se considera que siempre que no se excedan los límites del deslumbramiento perturbador este está bajo control.
El deslumbramiento perturbador se produce por la aparición de un velo luminoso que provoca una visión borrosa, sin nitidez y con poco contraste, que desaparece al cesar su causa. No obstante, este fenómeno no lleva necesariamente asociado una sensación incómoda como el deslumbramiento molesto. Para evaluar la pérdida de visión se utiliza el criterio del incremento de umbral (TI) expresado en tanto por ciento:
donde Lv es la luminancia de velo equivalente y Lm es la luminancia media de la calzada.
Coeficiente de iluminación en los alrededores
El coeficiente de iluminación en los alrededores (Surround Ratio, SR) es una medida de la iluminación en las zonas limítrofes de la vía. De esta manera se asegura que los objetos, vehículos o peatones que se encuentren allí sean visibles para los

4
conductores. SR se obtiene calculando la iluminacia media de una franja de 5 m de ancho a cada lado de la calzada.
Lámparas y luminarias
Las lámparas son los aparatos encargados de generar la luz. En la actualidad, en alumbrado público se utilizan las lámparas de descarga frente a las lámparas incandescentes por sus mejores prestaciones y mayor ahorro energético y económico. Concretamente, se emplean las lámparas de vapor de mercurio a alta presión y las de vapor de sodio a baja y alta presión.
Las luminarias , por contra, son aparatos destinados a alojar, soportar y proteger la lámpara y sus elementos auxiliares además de concentrar y dirigir el flujo luminoso de esta. Para ello, adoptan diversas formas aunque en alumbrado público predominan las de flujo asimétrico con las que se consigue una mayor superficie iluminada sobre la calzada. Las podemos encontrar montadas sobre postes, columnas o suspendidas sobre cables transversales a la calzada, en catenarias colgadas a lo largo de la vía o como proyectores en plazas y cruces.
Antiguamente las luminarias se clasificaban según las denominaciones cut-off, semi cut-off y non cut-off.
Máximo valor permitido de la intensidad emitida
para un ángulo de elevación Dirección de la intensidad máxima
80 º 90 º
Cut -off 30 cd /1000 lm 10 cd /1000 lm 65 º
Semi cut-off 100 cd /1000 lm 50 cd /1000 lm 75 º
Non cut -off > 100 cd /1000 lm > 50 cd /1000 lm 90º
Clasificación para luminarias de alumbrado público (CIE 1965)
En la actualidad, las luminarias se clasifican según tres parámetros (alcance, dispersión y control) que dependen de sus características fotométricas. Los dos primeros nos informan sobre la distancia en que es capaz de iluminar la luminaria en las direcciones longitudinal y transversal respectivamente. Mientras, el control nos da una idea sobre el deslumbramiento que produce la luminaria a los usuarios.
El alcance es la distancia, determinada por el ángulo , en que la luminaria es capaz de iluminar la calzada en dirección longitudinal. Este ángulo se calcula como el valor medio entre los dos ángulos correspondientes al 90% de IMAX que corresponden al plano donde la luminaria presenta el máximo de la intensidad luminosa.

5
Alcance longitudinal
Alcance corto < 60º
Alcance intermedio
60º 70º
Alcance largo > 70º
La dispersión es la distancia, determinada por el ángulo , en que es capaz de iluminar la luminaria en dirección transversal a la calzada. Se define como la recta tangente a la curva isocandela del 90% de IMAX proyectada sobre la calzada, que es paralela al eje de esta y se encuentra más alejada de la luminaria.
Dispersión transversal
Dispersión estrecha < 45º
Dispersión media 45º 55º
Dispersión ancha > 55º
Tanto el alcance como la dispersión pueden calcularse gráficamente a partir del diagrama isocandela relativo en proyección azimutal.
Alcance y dispersión de una
luminaria
Método gráfico para calcular el alcance y la dispersión
Por último, el control nos da una idea de la capacidad de la luminaria para limitar el deslumbramiento que produce.

6
Control limitado SLI < 2
Control medio 2 SLI 4
Control intenso SLI > 4
Donde la fórmula del SLI (índice específico de la luminaria) se calcula a a partir de las características de esta.
Disposición de las luminarias en la vía
Para conseguir una buena iluminación, no basta con realizar los cálculos, debe proporcionarse información extra que oriente y advierta al conductor con suficiente antelación de las características y trazado de la vía. Así en curvas es recomendable situar las farolas en la exterior de la misma, en autopistas de varias calzadas ponerlas en la mediana o cambiar el color de las lámparas en las salidas.
En los tramos rectos de vías con una única calzada existen tres disposiciones básicas: unilateral, bilateral tresbolillo y bilateral pareada. También es posible suspender la luminaria de un cable transversal pero sólo se usa en calles muy estrechas.
La distribución unilateral se recomienda si la anchura de la vía es menor que la altura de montaje de las luminarias. La bilateral tresbolillo si está comprendida entre 1 y 1.5 veces la altura de montaje y la bilateral pareada si es mayor de 1.5.
Relación entre la anchura de la vía y la altura de montaje
Unilateral A/H < 1
Tresbolillo 1 A/H 1.5
Pareada A/H > 1.5
Suspendida Calles muy estrechas
En el caso de tramos rectos de vías con dos o más calzadas separadas por una mediana se pueden colocar las luminarias sobre la mediana o considerar las dos calzadas de forma independiente. Si la mediana es estrecha se pueden colocar farolas de doble brazo que dan una buena orientación visual y tienen muchas ventajas constructivas y de instalación por su simplicidad. Si la mediana es muy ancha es preferible tratar las calzadas de forma separada. Pueden combinarse los brazos dobles con la disposición al tresbolillo o aplicar iluminación unilateral en cada una de ellas. En este último caso es recomendable poner las luminarias en el lado contrario a la mediana porque de esta forma incitamos al usuario a circular por el carril de la derecha.

7
En tramos curvos las reglas a seguir son proporcionar una buena orientación visual y hacer menor la separación entre las luminarias cuanto menor sea el radio de la curva. Si la curvatura es grande (R>300 m) se considerará como un tramo recto. Si es pequeña y la anchura de la vía es menor de 1.5 veces la altura de las luminarias se adoptará una disposición unilateral por el lado exterior de la curva. En el caso contrario se recurrirá a una disposición bilateral pareada, nunca tresbolillo pues no informa sobre el trazado de la carretera.
R > 300 m Asimilar a un tramo recto
R < 300 m A/H < 1.5 Unilateral exterior
A/H > 1.5 Bilateral pareada
En cruces conviene que el nivel de iluminación sea superior al de las vías que confluyen en él para mejorar la visibilidad. Asimismo, es recomendable situar las farolas en el lado derecho de la calzada y después del cruce. Si tiene forma de T hay que poner una luminaria al final de la calle que termina. En la salidas de autopistas conviene colocar luces de distinto color al de la vía principal para destacarlas. En cruces y bifurcaciones complicados es mejor recurrir a iluminación con proyectores situados en postes altos, más de 20 m, pues desorienta menos al conductor y proporciona una iluminación agradable y uniforme.

8
En las plazas y glorietas se instalarán luminarias en el borde exterior de estas para que iluminen los accesos y salidas. La altura de los postes y el nivel de iluminación será por lo menos igual al de la calle más importante que desemboque en ella. Además, se pondrán luces en las vías de acceso para que los vehículos vean a los peatones que crucen cuando abandonen la plaza. Si son pequeñas y el terraplén central no es muy grande ni tiene arbolado se puede iluminar con un poste alto multibrazo. En otros casos es mejor situar las luminarias en el borde del terraplén en las prolongaciones de las calles que desemboca en esta.
En los pasos de peatones las luminarias se colocarán antes de estos según el sentido de la marcha de tal manera que sea bien visible tanto por los peatones como por los conductores.
Por último, hay que considerar la presencia de árboles en la vía . Si estos son altos, de unos 8 a 10 metros, las luminarias se situarán a su misma altura. Pero si son pequeños las farolas usadas serán más altas que estos, de 12 a 15 m de altura. En ambos casos es recomendable una poda periódica de los árboles.

9
Niveles de iluminación recomendados
Los niveles de iluminación recomendados dependen de las normativas en vigor en cada territorio, aunque muchas de ellas toman como referencia los valores aconsejados por la CIE. Según esta, las vías se dividen en cinco tipos de acuerdo con las características del tráfico, de la vía y de los alrededores.
Tipo de vía Entorno Categoría Luminancia media Lm
(cd/m 2)
Coeficientes de uniformidad
Control del deslumbramiento
Global U0
Longitudinal UL Molesto G Perturbador TI
A A 2
0.4
0.7
6
10 % B
Claro B1 2 5
Oscuro B2 1 6
C Claro C1 2
0.5
5 20 %
Oscuro C2 1 6 10 %
D Claro D 2 4
20 % E
Claro E1 1 4
Oscuro E2 0.5 5
Valores recomendados por la CIE (1977)
Los valores indicados en la tabla son luminancias, no iluminancias, pues recordemos que son estas las responsables de provocar la sensación de visión.
A partir de 1995 la CIE ha establecido unas nuevas recomendaciones más acordes con las últimas investigaciones sobre el tema.
Categoría Luminancia media Lm (cd/m 2 )
Coeficientes de uniformidad Control
del deslumbramiento TI
Alrededores SR Global
U0 Perturbador
TI
M1 2.00
0.4
0.7 10 0.5 M2 1.50
M3 1.00 0.5
M4 0.75 --- 15 ---
M5 0.50
Valores recomendados por la CIE (1995)
Además de estas recomendaciones que se aplican en los tramos normales de las vías hay que considerar que en las zonas conflictivas (cruces, intersecciones, estrechamiento de la vía o del número de carriles, zonas con circulación de peatones o vehículos lentos que dificulten la circulación, rotondas, pasos a nivel, rampas, etc.) suele ser necesario un incremento de los requerimientos luminosos.
Si trabajamos con luminancias hay que aumentar en una unidad la categoría de la vía de valor de Mx más alta que converja en la zona. Cuando sea del tipo M1 a dicha zona también se aplicará este criterio.

10
En distancias cortas, menos de 60 m, no se pueden aplicar los métodos de cálculos de las luminancias y se utiliza el criterio de las iluminancias.
Categoría Nivel medio iluminancia E m (lux)
Coef global uniformidad U 0
C0 50
0.4
C1 30
C2 20
C3 15
C4 10
C5 7.5
El número de la categoría de la zona de conflicto (Cx) no será menor que el de la la vía de mayor categoría (Mx) que confluya en la zona.

BLOQUE II: SISTEMAS DE VISIÓN ARTIFICIAL.
TEMA V: Sistemas de adquisición de imágenes.
5.1. Arquitectura de un sistema de visión artificial 1
5.1.1. Procesos realizados en un sistema de adquisición de imágenes 1
a) Etapa de adquisición 1
b) Etapa de filtrado o preprocesado 2
c) Etapa de segmentación o aislamiento de objetos de interés 2
d) Etapa de extracción y selección de características 3
e) Etapa de reconocimiento de formas e inteligencia artificial 3
5.2. Sensores de imagen 5
5.2.1. Estructura general de los dispositivos CCD y CMOS 7
5.2.2. Estructura de los dispositivos CCD 8
5.2.3. Estructura de los dispositivos CMOS 8
5.2.4. Dispositivos CCD Vs CMOS 8
5.3. Características de los dispositivos CCD matriciales 9
5.4. Tarjetas de adquisición 11
5.4.1. Parámetros principales de una tarjetas de adquisición 12
5.4.2. Mecanismo de la ganancia en una tarjeta de adquisición 13
5.5. Bibliografía 14

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
1
5.1. Arquitectura de un sistema de visión artificial.
Un Sistema de Visión Artificial se trata de aquel concepto donde se mantienen
unidas nociones de visión y de computadores. Mediante un proceso de extracción
fotográfico somos capaces de obtener información a partir de unas determinadas
imágenes del mundo físico. A través de estas imágenes, logramos capturar las
principales características de los objetos que deseamos analizar hasta el punto de llegar
a definirlos casi en su totalidad.
Figura 5.1. Arquitectura general de un sistema de adquisición de imágenes.
5.1.1. Procesos realizados en un sistema de adquisición de imágenes.
La operación básica en los sistemas de adquisición de imágenes es la
especificación de la intensidad (o color) de la imagen en un arreglo regular de puntos en
el espacio. Los procesos que realiza un sistema de estas características son
principalmente los siguientes:
a) Proceso de adquisición de imágenes.
Generalmente, dichos sistemas están equipados con un sensor visual (cámaras
CCD o CMOS) a partir de cuál creamos la instantánea del objeto a investigar. Mediante
un proceso eléctrico, la información luminosa obtenida
pasará a través la tarjeta de adquisición para, finalmente,
almacenarse en el disco duro del computador. La tarjeta de
adquisición realiza siempre el proceso de transcribir la
información al código binario transformando así, nuestra
señal analógica en discreta (o digital). Con la tarjeta de
adquisición conseguimos, además, adaptar la imagen a una
serie de reglas de normalización. De esta manera, logramos
darle a nuestra imagen un carácter regularizado para que, si deseamos emplearlo en otro
sistema compatible con el nuestro, nuestra imagen también sea válida.
Tarjeta de adquisición Monitor analógico
Información
analógica Sensor visual
Información
digital
Figura 5.2. Cámara CCD
BUS
Computador Consola

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
2
Con ello, conseguimos eliminar barreras de compatibilidad con otras compañías
de cámaras y demás. Por esta razón entre otras, es por lo que no conectamos
directamente la cámara a la CPU si no que entre ambas está la tarjeta de adquisición
para conseguir así extender el uso de la imagen obtenida.
b) Etapa de filtrado o pre-procesado.
En algunos sistemas, se incluye también un conjunto accesorios (como es el
monitor analógico) mediante los cuales conocemos los resultados antes de que se
almacenen en el disco duro. Por tanto, si no nos interesa la imagen obtenida (ya sea por
un fallo de iluminación, abundancia de ruido u otras razones) la rechazamos antes de
emplear memoria de la CPU.
Cuando se adquiere una imagen mediante cualquier sistema de captura, a
menudo ésta no es utilizable directamente por el sistema de visión. La aparición de
variaciones en intensidad debidas al ruido, por deficiencias en la iluminación, o la
obtención de imágenes de bajo contraste hace necesario un preproceso de la imagen con
el objetivo fundamental de corregir estos problemas, además de aplicar aquellas
transformaciones a la imagen que acentúen las características que se deseen extraer de
las mismas, de forma que se facilite las operaciones de las etapas posteriores.
Pertenecen a este campo las técnicas de transformaciones geométricas, las basadas en el
histograma, el filtrado espacial y el filtrado frecuencial. Aunque existen líneas de
investigación abiertas, no es el campo más activo en ese sentido, y las técnicas
existentes son bastante útiles para la mayoría de las aplicaciones. Algunas de las
técnicas más habituales son:
• Conversión de los niveles de gris: Su objetivo es la mejora de la calidad de la
imagen. Se han desarrollado empleando teorías de la psicología visual humana y
modelos de los dispositivos físicos de adquisición de imágenes. Su aplicación se
centra en el procesamiento con “observador humano”.
• Transformaciones geométricas: Los objetivos de éstas son la corrección de la
perspectiva y la reconstrucción tridimensional de los objetos de la escena.
• Transformación del histograma: Las transformaciones del histograma pueden
facilitar la segmentación de objetos de la imagen, aunque habitualmente solo
sirve para modificar el contraste de la imagen y el margen dinámico de los
niveles de gris.
• Filtrado espacial y frecuencial: Dado que pueden suponer una importante
modificación de la imagen original, habitualmente solo se consideran filtrados
aquellas operaciones realizadas en el dominio espacial o frecuencial que
suponen transformaciones pequeñas de la imagen original.
c) Etapa de segmentación o aislamiento de objetos de interés.
Cuando ya se dispone de la imagen capturada y filtrada, es necesario aislar o
separar los objetos de interés de la escena. Se pretende por tanto dividir una imagen en
diferentes regiones o, dicho de otra forma, detectar automáticamente los bordes entre los
elementos o regiones.
Las operaciones de segmentación de una escena dependen de la propia escena y
de la información que se busque dentro de la imagen.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
3
Por ejemplo, en fotografía aérea se utiliza para separar regiones pobladas,
agrícolas, bosques, aguas, etc. En imagen médica se usa para aislar zonas enfermas de
los órganos, o para detectar y contar microorganismos en microscopía. Industrialmente,
se usa como primer paso para la medición de piezas, para determinar la correcta
disposición del etiquetado de los envases (aislar el envase, aislar la etiqueta, determinar
si la relación entre estos dos objetos es correcta), para la medición de irregularidades en
superficies homogéneas, para la detección de cambios de texturas, en las que el sistema
ha de determinar si es un defecto o no lo es, etc. Las técnicas básicas de segmentación
se pueden dividir en tres grupos:
• Aplicación de umbrales de nivel de gris.
• Agrupación por rasgos comunes.
• Extracción de bordes.
No obstante, la segmentación de imágenes es una temática actual de
investigación y se han definido numerosos métodos diseñados para aplicaciones
particulares. No obstante, no hay métodos que sean útiles en una amplia variedad de
situaciones, por lo que cada problema necesita la adaptación o desarrollo de nuevas
técnicas.
d) Etapa de extracción y selección de características.
Con los objetos a estudiar ya definidos, es necesario extraer una serie de
medidas que los caractericen adecuadamente, en forma de vector de características.
Como norma general, para la elección de las características se intenta que:
• Sean discriminantes, es decir, tengan valores numéricos diferentes para clases
diferentes.
• Sean fiables, es decir, tengan valores parecidos dentro de una misma clase.
• Estén incorreladas, es decir, obtener la misma información con el mínimo
número de características.
• Se calculen en un tiempo aceptable, de forma que sea utilizable en problemas de
tiempo real.
Dado que las características relevantes son a menudo desconocidas a priori,
habitualmente se introducen muchas características candidatas para intentar representar
mejor las clases, aún cuando muchas de ellas puedan ser parcial o completamente
redundantes o irrelevantes. No obstante, existen unas técnicas para mejorar las
prestaciones del conjunto de características escogido inicialmente. Estas están
íntimamente ligadas al reconocimiento de formas en su etapa de diseño del clasificador. e) Etapa reconocimiento de formas e inteligencia artificial.
Normalmente, la visión artificial se utiliza para tomar decisiones a partir de la
información proporcionada por el sistema de adquisición de imágenes y las
transformaciones y operaciones realizadas con ellas. La información extraída se puede
considerar como un vector que recoge las características o rasgos diferenciadores de la
imagen analizada. En el caso de que se trate de una aplicación de medición, este vector
recoge todas aquellas medidas que se deseaban obtener.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
4
En aplicaciones de inspección y, sobre todo, en aplicaciones de clasificación,
este vector es el conjunto de datos con los que ha de trabajar un reconocedor o
clasificador encargado de extraer las conclusiones posibles a partir del vector de
entrada. Para el diseño del clasificador es necesaria una etapa de selección de
características y una etapa de aprendizaje o entrenamiento. Generalmente, se usa el
propio clasificador como evaluador del conjunto de características en prueba dado que
es el método que proporciona la mayor fiabilidad, aunque sea el más costoso
temporalmente y de menor generalidad o capacidad de aplicación del clasificador a
otros problemas. Respecto a los métodos clásicos de búsqueda secuencial, actualmente
uno de los campos de investigación abiertos es el uso de algoritmos genéticos para la
selección en paralelo de las características.
En el reconocimiento de formas aplicado a la visión artificial se utilizan técnicas
de reconocimiento geométrico de formas, como el aprendizaje supervisado (se conoce la
clase a la que pertenece cada vector) en condiciones estadísticas o algoritmos de
clasificación no supervisados o clustering y, además, las redes neuronales, siendo éstas
últimas especialmente interesantes por su capacidad de aprendizaje adaptativo. Existen
numerosos algoritmos para cada una de estas técnicas y se investiga ampliamente el
desarrollo de nuevos algoritmos e implementaciones hardware de éstos. El problema
fundamental de estas técnicas, es que cada una de ellas suele ser la más adecuada para
las características de un tipo específico de problema no conocidas a priori, lo que
dificulta la selección de la técnica con la que se desea abordar inicialmente el problema.
→
−→
→
entoReconocimi
Extracción
ónSegmentaci
CPU
Consola
procesadoPrealógicoMonitor an
procesadoEquipo de
nAdquisicióón adquisiciTarjeta de
ualSensor visnadquisicióEquipo de
n adqusicióSistema de

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
5
5.2. Sensores de imagen.
Los sensores de imagen son componentes sensibles a la luz que modifican su
señal eléctrica en función de la intensidad luminosa que perciben. La tecnología más
habitual en este tipo de sensores es CCD (Charge Coupled Devices o dispositivos de
acoplamiento de carga) donde se integra en un mismo chip los elementos fotosensibles
y el conjunto de puertas lógicas y circuitería de control asociada. En éstos, la señal
eléctrica que transmiten los fotodiodos es función de la intensidad luminosa que
reciben, su espectro, y el tiempo de integración (tiempo durante el cual los fotodiodos
son sensibles a la luz incidente).
Otra tecnología que está empezando a extenderse son los sensores CMOS
(Complementary Metal Oxide Semiconductor) dadas las ventajas de éstos sobre los
CCD, y la reducción de precios de estos dispositivos.
En cuanto al rango dinámico (rango de amplitud entre los valores máximos y
mínimos que un elemento puede producir, medido en decibelios), se pasa de los 70dB
de los sensores CCD a los 120 dB de los sensores CMOS, valor más cercano a los 200
dB del ojo humano, lo que facilita la autoadaptación en el propio chip al brillo existente
en el entorno, como se puede apreciar en la figura 2.14. El sensor CMOS puede
amplificar de forma individual la respuesta de los píxeles en función de sus respectivas
condiciones de iluminación. El acceso multipíxel permite configurar individualmente
distintos intervalos de tiempo de integración, mejorando la calidad de la imagen
mediante la selección del mejor tiempo de exposición de cada píxel.
(a)
(b)
Figura 5.3. Diferencia de rango dinámico: (a) sensores CCD; (b) sensores CMOS.
Existen diferentes arquitecturas de sensores. En primer lugar están los sensores
lineales. En estos el sensor es una línea de fotodiodos. Esta arquitectura permite la
utilización de sensores de 1 × 1024, 1 × 2048, 1 × 4096 e incluso 1 × 6000 píxeles, lo
que la hace muy adecuada para trabajar con altas resoluciones sobre superficies en
movimiento. Para condiciones de iluminación muy exigentes o velocidades de trabajo
muy altas existe la posibilidad del uso de sensores TDI (Time Delay Integrated). Esta
tecnología consiste en el uso de varias líneas de captura sobre la misma línea del objeto,
con el fin de sumar su carga y obtener así una mayor sensibilidad.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
6
(a) (b) (c)
Figura 5.4. (a) Frame Transfer; (b) Inter-line Transfer; (c) Frame-Inter-line Transfer.
En segundo lugar están los sensores de área. Estos alcanzan resoluciones
habituales de 1024 × 1024, aunque existen en el mercado algunas casas que disponen de
cámaras especiales con resoluciones de hasta 3072 × 2048. En este caso existen dos
tecnologías de adquisición de imágenes, entrelazada y no entrelazada.
El método entrelazado captura las líneas pares e impares que forman una imagen
en instantes de tiempo diferentes. Una vez obtenida la imagen, puede ésta estar formada
a partir de dos formas de campos distintas, dependiendo de la situación de los campos:
Campo IMPAR: La imagen esta formada por las líneas impares de píxeles, es decir, el
campo impar es aquel en el cual aparecen los las filas impares de píxeles.
Campo PAR: La imagen esta formada por las líneas pares de píxeles, es decir, el campo
par es aquel en el cual aparecen los las filas pares de píxeles.
Si unimos tanto el campo impar de una imagen como el campo par, obtenemos
como resultado una imagen entrelazada de ambos, que contiene tanto las líneas (filas)
pares como las impares.
Figura 5.5. La suma de los campos pares e impares resulta una imagen de ambos
campos entrelazados.
PAL EIA
Frecuencia de imágenes 25 Hz 30 Hz
Frecuencia de campos 50 Hz 60 Hz
Número de líneas 625 525
Número de columnas 767 647
Número de elementos 768 × 580 756 × 494
Tabla 5.1. Características de los sistemas PAL y EIA.
Píxel

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
7
Figura 5.6. Tensión frente a tiempo en un campo.
La tecnología de no entrelazado (progressive scan) captura todas las líneas en el
mismo instante de tiempo. Es más costoso económicamente, pero indispensable para
trabajar con objetos en movimiento.
Independientemente de la arquitectura utilizada, existen otros aspectos
importantes en estos sensores. La cuantización (conversión Analógica-Digital)
determina el número de bits utilizados para representar la información capturada. Por
ejemplo, usando un sistema blanco y negro de 8 bits tenemos 256 niveles diferentes
mientras que, usando un sistema de 10 bits, obtendríamos 1024 niveles de gris
diferentes, lo que permite una mayor definición.
5.2.1. Estructura general de los dispositivos CCD y CMOS.
Estos dispositivos son muy utilizados dentro del campo del Tratamiento de
Imágenes a nivel industrial y de investigación puesto que, al ser dispositivos
electrónicos, trabajan en tiempo real aportando eficacia y rapidez al proceso de
adquisición.
Figura 5.7. Arquitectura general de un dispositivo fotorreceptor.
Puesto que estas cámaras tienen que transformar la información luminosa en
eléctrica, disponen de un mecanismo mediante el cual se consigue dicha transformación
energética. A partir de unos sensores, la cámara capta la energía luminosa pues éstos
actúan como condensadores o elementos capacitivos (tienen la singularidad de
almacenar en ellos tanta energía eléctrica como energía luminosa reciben). Por tanto,
estos componentes adquieren energía eléctrica en función de los lúxeles que llegan a
ellos obteniendo así una imagen digital en escala de grises. Otro sistema es aquel en el
que sólo los componentes detectan si están cargados o no lo cual implica que la imagen
resultante sea en blanco y negro.
Señal (V)
Tiempo
Pulsos de
sincronismo horizontal
Pulsos de
sincronismo vertical
Intensidad de una
línea
SiO2
Canal n
Sustrato de
tipo P

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
8
5.2.2. Estructura de los dispositivos CCD: Charge Coupled Devices.
Este tipo de dispositivo se caracteriza por tener un proceso de detección de luz
en el cual el proceso de conversión se realiza cuando prácticamente la señal luminosa ha
recorrido todo su camino. Los pasos fundamentales que se realizan son los siguientes:
• Transfiere la carga de cada píxel secuencialmente a una estructura de salida común.
• Se convierte la luz a voltaje mediante un conversor determinado en la salida.
• Se envía a la frame grabber.
Figura 5.8. Mecanismo de transmisión de información del dispositivo CCD.
5.2.3. Estructura de los dispositivos CMOS: Complementary Metal Oxide Semiconductor.
Este tipo de dispositivo se caracteriza por tener un proceso de detección de luz
en el cual el proceso de conversión se realiza durante el momento de transitar del píxel
al píxel contiguo. Los pasos fundamentales que se realizan son los siguientes:
• Transfiere la carga de cada píxel secuencialmente a una estructura de salida común.
• Se convierte la luz a voltaje mediante un conversor determinado en cada píxel.
• Se envía a la frame grabber.
Figura 5.9. Mecanismo de transmisión de información del dispositivo CMOS.
5.2.4. Dispositivos CCD Vs CMOS.
CMOS: tiene una integración mayor, menor disipación y tamaño a expensas de
una menor calidad de imagen y menor flexibilidad. Para grandes volúmenes con pocos
requerimientos de calidad es la opción tecnológica. Sus aplicaciones principales son las
cámaras de seguridad, videoconferencias (PC), código de barras, scanners, juguetes,…
CCD: tiene una mejor calidad de imágenes y flexibilidad a expensas de un
mayor tamaño. Sus aplicaciones son en fotografía digital, high-end imaging,
aplicaciones industriales de alta performance, aplicaciones científicas y médicas.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
9
5.3. Características de los dispositivos CCD matriciales.
A continuación, enunciaremos una serie de características de estos dispositivos:
Tiempo de integración: Tiempo necesario para que el sensor se cargue, es decir, tiempo
durante el cual los fotodiodos son sensibles a la luz incidente.
Tiempo de adquisición: Tiempo que se tarda en llegar la información que ha recogido
el fotorreceptor hasta el lugar en el cual se considera adquirida dicha información.
Factor gamma: ¿Cómo nos interesa que sea la respuesta del sensor en relación con el
número de fotones que le llegan? Generalmente, nos importa que la proporción entre
ambas características sea lineal para así poder determinar el voltaje con exactitud. La
relación entre ambas obedece la siguiente ecuación:
( ) φϑϑ γ += kV (1)
donde
• V, es el voltaje en función de los fotones.
• k, es una constante de amplificación.
• ϑ , es la cantidad de energía que aportan los fotones.
• γ, Es el factor de linealidad.
• φ , El ángulo de desfase o desplazamiento.
Figura 5.10. Relación de voltaje en función de los fotones que actúan sobre el sensor.
Sensibilidad absoluta: Se trata el valor mínimo para el cual se comienza a detectar un
nivel de intensidad lumínica, es decir, a partir de este límite, el sensor ya es capaz de
detecta la iluminancia que llega a él.
Sensibilidad relativa: Con este concepto definimos la diferencia entre cambios de
iluminancia, es decir, determina el límite para percibir un cambio de iluminancia de un
nivel al siguiente.
Para el caso del siguiente ejemplo, tenemos que la sensibilidad absoluta es de 10
fotones ya que necesitamos la energía de 10 fotones para empezar a percibir
iluminancia. También tenemos que la sensibilidad relativa es de 2 fotones por voltio, es
decir, una vez alcanzados los 10 fotones, para variar un voltio necesitamos incrementar
en dos fotones la cantidad total.
FO
TO
NE
S
+
−
VO
LT
AJE

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
10
Figura 5.11. Ejemplo de sensibilidad absoluta y relativa.
Relación señal ruido (SNR, del inglés «Signal Noise Ratio»): Este parámetro nos
informa sobre la claridad de la imagen. Si diferenciamos entre imagen útil e imagen con
ruido, podemos detectar perturbaciones en aquellos objetos no alineados, definiendo así
el ruido. Los cambios de temperatura producen lo que se denomina constante oscura de
modo que, una imagen oscura, puede tener puntos blancos debido a la variación de
temperatura por lo que la no linealidad produce ruido.
Ganancia espectral: No todos los sensores trabajan en todas las longitudes de onda ya
que, por ejemplo, los sensores de los dispositivos CCD suelen ser muy sensibles a los
rayos infrarrojos. Esto es debido a que cada cámara, en particular, dispone de filtros
para recoger sólo longitudes de onda de una determinada categoría (aquella que nos
interese para la aplicación que estamos ocupando).
Multi-net: Un sistema de visión con un número de cámaras determinado 2, 3, 4,…
tendrá posibilidades de capturar distintas características en una imagen, es decir, dos
cámaras CCD son capaces de determinar distancias mientras que una sola es incapaz,
por ejemplo.
¿Puede existir una cámara CCD que trabaje con 0 lux? La respuesta es afirmativa ya
que aunque a la cámara no llegue radiación visible esta puede detectar otro tipo de
radiaciones como infrarrojos, ultravioletas,…
Ancho (mm) Alto (mm) Diagonal (mm)
41 3,2 2,4 4
31 4,8 3,6 6
21 6,4 4,8 8
32 8,8 6,6 11
Tabla 5.2. Características de los dispositivos CCD Matriciales.
0 Voltios
1 Voltios
4 Voltios
10 fotones
6 fotones
2 fotones

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
11
5.4. Tarjetas de adquisición.
Las tarjetas de captura de imagen permiten transferir la imagen de la cámara a la
memoria de ordenador con el fin de que éste pueda realizar el procesamiento adecuado a
las imágenes. Aspectos importantes en esta tarjeta son la velocidad de transmisión, el
formato de los datos, la profundidad de píxel, la capacidad de captura por disparo, la
capacidad de preprocesado de la imagen, la velocidad de transferencia de la imagen de
la memoria de la tarjeta a la memoria del ordenador, el reset asíncrono o la capacidad de
controlar parámetros de la cámara en tiempo real.
Evidentemente, todos los datos relativos a velocidades de transmisión son
especialmente importantes para poder trabajar en tiempo real. Este aspecto ha mejorado
notablemente en los dos últimos años. Otro parámetro que ha evolucionado muy
favorablemente es el formato de los datos. Con la estandarización definitiva de los
formatos EIA -644 o LVDS, y del IEEE 1394, se consigue no sólo aumentar la
velocidad de transferencia, sino que también se hace con una mayor inmunidad al ruido
y con longitudes de cableado aceptadas mucho mayores (de 2 – 10 metros a 25 metros
de distancia cámara – tarjeta).
La capacidad de sincronizar la captura de las imágenes con una señal externa
también se ha mejorado con el reset asíncrono, lo que habilita el inicio de la captura sin
tener que esperar el siguiente vertical blank (es decir, sin necesidad de finalizar
completamente la captura anterior). La capacidad de controlar la cámara con salidas RS-
232 de la tarjeta facilita la variación de parámetros de la cámara, fundamentalmente la
ganancia de los canales RGB, o de ópticas motorizadas en tiempo real.
Un aspecto relativamente reciente es la posibilidad de multitap. Existen tarjetas
capaces de trabajar con varias cámaras a la vez (hasta 6 cámaras de 8 bits por píxel), o
usar los canales de que dispone para trabajar con cámaras multitap que transmiten a la
vez varios píxeles por cada uno de los canales. Por ejemplo, a 40 MHz, una tarjeta
puede recibir la información por un canal de 8 bits a 40 Mbytes/sec, mientras que si usa
2 canales, la información la puede recibir a 80 Mbytes/sec, incrementándose de forma
proporcional al número de canales la velocidad de transmisión.
En cuanto a la capacidad de proceso de las tarjetas, actualmente prácticamente
solo existe la posibilidad de incorporar un Procesador Digital de Señal (DSP), que
permite realizar determinados algoritmos de análisis de imágenes en la propia memoria
de la tarjeta, acelerando la implementación de los algoritmos de visión. El desarrollo de
módulos de proceso altamente especializados que poseían casas como Imaging
Technology ha sido abandonado tras la evidencia de la superior evolución en
prestaciones de los procesadores convencionales, que hacen que el coste de desarrollo
de las placas altamente especializadas no sea rentable para las casas fabricantes de las
misma, al ser estos rápidamente superados por los constantes incrementos en velocidad
y mejoras internas de los procesadores convencionales.
Otro de los recientes elementos en cuanto a las tarjetas de captura de imágenes
es la integración de la tarjeta de captura de imágenes, la visualización, y el módulo de
proceso en un solo elemento. Estos equipos se proporcionan en un chasis adecuado para
trabajar en entornos industriales.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
12
5.4.1. Parámetros principales de una tarjeta de adquisición.
Sistema monocromático o color: Este parámetro de la tarjeta de adquisición hace
referencia al tipo de sistema empleado para la captura de la información, es decir, al tipo
de reglas a seguir para la captura de una imagen en color (sistema color) o con una
única tonalidad (sistema monocromático).
Tipo de entrada: Este otro parámetro indica el tipo de sistema de imágenes empleado
para la adquisición, o sea, determina si empleamos el sistema RGB, S-VIDEO, el
"conector amarillo",…
Tipo de bus: Se trata de una característica vinculada con la velocidad del bus,
indicándonos tanto velocidad media de circulación como picos de velocidad.
Procesamiento propio: Este parámetro sólo lo presentan aquellas tarjetas que se pueden
emplear para el procesamiento de forma interna de la imagen antes de su
almacenamiento (permitiendo así realizar modificaciones directamente sobre la
imagen). Algunas tarjetas son capaces de trabajar con la imagen a velocidades de
computación cercanas a las de una computadora convencional.
Conectividad: Esta es una característica importante de una tarjeta de adquisición puesto
que permite realizar varias tareas a la vez, es decir, mientras en un monitor aparece la
imagen original, en otro podemos visualizar las modificaciones que le efectuemos.
Resolución: Dependiendo de la tarjeta, este parámetro nos indicará el período de
muestreo de la señal y también el número de píxeles que obtendremos.
El tiempo de muestreo de una señal se puede calcular como la suma del tiempo
de captura, el tiempo de recorrido de la señal hasta la tarjeta de adquisición y del tiempo
de procesamiento de la misma:
ntoprocesamierecorridocapturamuestreo tttt ++= (3)
Mediante el trigger, conseguiremos aprovechar el tiempo de captura para que la
tarjeta transmita y procese la imagen capturada.
Memoria: Hace referencia a la memoria integrada que trae por defecto la tarjeta de
adquisición, aspecto que nos podría limitar si la imagen es de dimensiones
considerables. Dicha capacidad de memoria nos obligará a trabajar con un mayor o
menor número de capturas y con imágenes más o menos grandes.
Salida: La salida dependerá de cada tarjeta ya que cada compañía tendrá una serie de
protocolos asignados a las salidas y encaminados a diferentes lenguajes computados.
Sistema de desarrollo: Cuando tengamos que realizar la tarea de selección de una
tarjeta de adquisición hemos de tener muy presente la elección de nuestro lenguaje de
programación ya que, dependiendo de dicha tarjeta, tendremos comodidades para
determinados lenguajes de programación.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
13
5.4.2. Mecanismo de la ganancia en una tarjeta de adquisición.
El método de aprovechamiento de las distintas cámaras CCD consiste en dividir
la imagen en función de la escala de grises. El nivel de gris más bajo será el negro y el
más alto, efectivamente, será el blanco. La ganancia irá acorde con la banda de
digitalización. En este tipo de mecanismo, al variar la ganancia y el desplazamiento es
posible que aparezca una pérdida de información de niveles bajos o altos. Por
consiguiente, la única solución para no perder información es aumentar la ganancia
hasta que se ajuste que el nivel máximo y el mínimo de gris y evitemos una pérdida de
contraste.
¿Depende la resolución de la imagen del modo de muestreo de la señal? Sí, en aquel
caso en el cual la cámara tiene una resolución de, por ejemplo, 512 × 512 pero nuestra
señal no tiene la misma resolución. Si la cámara ha dividido la imagen, la tarjeta que
pasa de analógico a digital tiene una resolución de 1.024 y, por tanto, la imagen tendrá
una resolución distinta a la imagen capturada.
Figura 5.12. La ganancia en la tarjeta de adquisición.
Nivel de blanco
Nivel de negro
Nivel de blanco
Nivel de negro
Nivel de blanco
Nivel de negro
Nivel de blanco
Nivel de negro

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
14
5.5. Bibliografía.
Tratamiento Digital de Imágenes. Rafael C. González, Richard E. Woods.
Visión por Computador, Fundamentos y Métodos. Arturo de la Escalera.

Tema 5 – Sistemas de adq. de imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
15
Visión por Computador. Javier González Jiménez.

BLOQUE II: SISTEMAS DE VISIÓN ARTIFICIAL.
TEMA VI: Imágenes digitales.
6.1. Modelo de una imagen simple 1
6.2. Muestreo y cuantificación 2
6.3. Principales características de las imágenes 5
6.3.1. Brillo, contraste y nitidez 5
a) Brillo 5
b) Contraste 6
c) Nitidez 7
6.3.2. Relaciones básicas entre píxeles 8
a) Vecinos de un píxel 8
b) Conectividad 8
c) Medidas de distancia 9
6.4. Bibliografía 10

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
1
6.1. Modelo de una imagen simple.
El término imagen se refiere a una función bidimensional de intensidad de luz
f(x,y), donde x e y representan las coordenadas espaciales y el valor de f en un punto cualquiera (x,y) es proporcional al nivel de gris de la imagen en ese punto.
Figura 6.1 Convenio de ejes utilizado para la representación de imágenes.
Para esta asignatura, esta función f(x,y) será discreta puesto que el proceso de
obtención de la imagen no es continuo, es decir, se establece un período de muestreo (distancia entre dos mediciones adyacentes) a partir del cual se realiza la obtención de información mediante la imagen original.
Puesto que la luz es una forma de energía, f(x,y) debe ser estrictamente positiva
y finita, es decir,
( ) +∞<≤ yxf ,0 La naturaleza de dicha función de intensidad de la luz puede estar caracterizada
en dos componentes de modo que la función se puede expresar como el producto de ambas: f(x,y) = i(x,y)·r(x,y). Las componentes son las siguientes:
1) Componente de iluminación, i(x,y): La cantidad de luz incidente procedente de la fuente sobre la escena contemplada acotada dentro de valores positivos. La naturaleza de i(x,y) está determinada por la fuente de luz.
( ) +∞<≤ yxi ,0
2) Componente de reflectancia, r(x,y): La cantidad de luz reflejada por los objetos
de la escena estando acotada entre 0 y 1. La naturaleza de r(x,y) viene determinada por las características de los objetos de la escena.
( ) 1,0 ≤≤ yxr

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
2
6.2. Muestreo y cuantificación.
Para ser utilizable para el proceso por medio de computadora, la función debe
ser digitalizada tanto espacialmente como en amplitud. La digitalización de las coordenadas espaciales (x,y) se denomina muestreo de la imagen y la digitalización de la amplitud se conoce bajo el nombre de cuantificación del nivel de gris.
La imagen real continua f(x,y) se describe de forma aproximada por una serie de muestras equiespaciadas organizadas en forma de una matriz de dimensión N × M
(N filas y M columnas), donde cada elemento es una cantidad discreta:
( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
−−−−
−−
=
1,11,10,1
1,11,10,1
1,01,00,0
,
MNfNfNf
Mfff
Mfff
yxf
L
MOMM
L
L
(1)
El término de la derecha representa una imagen digital (por ejemplo, la que se obtendría como resultado de la captura de una imagen mediante una cámara digital). A cada elemento de la matriz suele denominársele elemento de la imagen o píxel, del inglés «picture element». El proceso de muestreo puede entenderse como una partición en una cuadrícula del plano xy, siendo las coordenadas de cada elemento de la cuadrícula un par de elementos enteros. Por tanto, f(x,y) representa una imagen digital si el par (x,y) son enteros de Ζ2 y f es una función que asigna un nivel de gris (un número real) a cada par de coordenadas (x,y) distinto. En el proceso de digitalización se necesita tomar decisiones sobre los valores de N, M y de los niveles de gris para cada píxel (estas cantidades suelen ser potencias de 2, es decir, N = 2
n M = 2
m y G = 2
g). Empleando lo dicho anteriormente, tenemos que el número, b, de bits necesarios para almacenar una imagen digitalizada es:
gNMb ··=
Número de niveles de gris g
1 2 3 4 5 6 7 8
Dim
ensi
ones
de
la m
atri
z
2 4 8 12 16 20 24 28 32
4 16 32 48 64 80 96 112 128
8 64 128 192 256 320 384 448 512
16 256 512 768 1.024 1.280 1.536 1.792 2.048
32 1.024 2.048 3.072 4.096 5.120 6.144 7.168 8.192
64 4.096 8.192 12.288 16.384 20.480 24.576 28.672 32.768
128 16.384 32.768 49.152 65.536 81.920 98.304 114.688 131.072
256 65.536 131.072 196.608 262.144 327.680 393.216 458.752 524.288
512 262.144 524.288 786.432 1.048.576 1.310.720 1.572.864 1.835.008 2.097.152
1.024 1.048.576 2.097.152 3.145.728 4.194.304 5.242.880 6.291.456 7.340.032 8.388.608
Tabla 6.1 Número de bits de almacenamiento para valores de N = M y g.

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
3
¿Qué muestreo y cuántos niveles de gris son necesarios para una buena
aproximación? La resolución (el grado de detalle discernible) de una imagen depende estrechamente de estos dos parámetros. Cuanto más se incrementan, más se aproxima la imagen digitalizada a la imagen original. Sin embargo, esto implica una desafortunada circunstancia ya que el almacenamiento y los requisitos de procesamiento crecen rápidamente en función de N, M y g.
“Es difícil definir qué es una «buena imagen», puesto que la calidad de la misma
no es sólo subjetiva sino que también depende mucho de las necesidades de una aplicación determinada.”
Figura 6.2 Efectos de reducir la resolución espacial. La Figura 6.2 se puede observar diversas muestras de una imagen digital de un reloj CASIO con 256 niveles de gris y 512 × 512 píxeles. Las siguientes muestran los resultados de reducir la resolución espacial de N = 512 a N = 256, 128, 64, 32 y 16. Puesto que todas las imágenes corresponden a la misma área representada (512 × 512 puntos), los píxeles de las imágenes de menor resolución han sido duplicados para cubrir toda el área. Esta aplicación de píxeles produce un resultado similar a un tablero de ajedrez, que es particularmente visible en las imágenes de menor resolución. Comparando las imágenes de 512 × 512 píxeles con la de 256 × 256 píxeles se comprueba que es virtualmente imposible diferenciarlas. Sin embargo, este efecto es más visible en la imagen de 64 × 64 y se hace muy pronunciado para las imágenes de 32 × 32 y 16 × 16 píxeles.
512 × 512 256 × 256 128 × 128
64 × 64 32 × 32 16 × 16

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
4
Figura 6.3 Efectos de reducir la cantidad de niveles de grises.
Esta última figura ilustra los efectos producidos al reducir la cantidad de bits empleados para representar el número de niveles de gris de una imagen. Las imágenes han sido obtenidas reduciendo el número de niveles de gris desde g = 7 hasta g = 1, manteniendo constante la resolución espacial en 512 × 512 píxeles. Las imágenes con 256, 128 y 64 niveles de gris son virtualmente idénticas para todas las aplicaciones prácticas. Sin embargo, esto no es así para la imagen con 32 niveles puesto que ha desarrollado un conjunto casi imperceptible de estructuras ondulantes en las zonas de niveles de gris suaves. Este efecto, originado por el empleo de un número insuficiente de niveles de gris en las zonas más suaves de una imagen, se denomina falso contorno (bastante visible en las imágenes que emplean menos de 32 niveles de gris).
256 128 64
32 16 8
4 2

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
5
6.3. Principales características de las imágenes.
6.3.1. Brillo, Contraste y nitidez.
a) El brillo.
Hace referencia al nivel medio de los niveles de gris, es decir, a la media
aritmética de la importancia de cada nivel de gris que compone la imagen:
∑=
=L
i
ii cnN
B1
·1
(2)
donde B es el nivel medio de niveles de gris, N es la cantidad de píxeles, L es la
cantidad de niveles de gris en total que presenta la imagen (L = 2, 4, 8, 16, 32, 64, 128 ó
256), ni es el nivel de gris i y ci es la cantidad de veces que se ha repetido el nivel i. Veamos el siguiente ejemplo con 8 niveles de gris:
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 1 2 2 2 2 2 2 2 2 2 2 2 1 0 0 1 2 3 3 3 3 3 3 3 3 3 2 1 0 0 1 2 3 4 4 4 4 4 4 4 3 2 1 0 0 1 2 3 4 5 5 5 5 5 4 3 2 1 0 0 1 2 3 4 5 6 6 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 6 5 4 3 2 1 0 0 1 2 3 4 5 6 6 6 5 4 3 2 1 0 0 1 2 3 4 5 5 5 5 5 4 3 2 1 0 0 1 2 3 4 4 4 4 4 4 4 3 2 1 0 0 1 2 3 3 3 3 3 3 3 3 3 2 1 0 0 1 2 2 2 2 2 2 2 2 2 2 2 1 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
[ ] 2022.245
91
225
4551·78·616·524·432·340·248·156·0
15·15
1 ≈≈==+++++++=B
Si pretendemos aumentar el nivel de brillo, tan sólo tendremos que efectuar un desplazamiento del nivel medio de gris que contiene la matriz, es decir, por ejemplo, queremos aumentar el nivel de gris en dos niveles más. Tendríamos la siguiente imagen:
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 3 2 2 3 4 4 4 4 4 4 4 4 4 4 4 3 2 2 3 4 5 5 5 5 5 5 5 5 5 4 3 2 2 3 4 5 6 6 6 6 6 6 6 5 4 3 2 2 3 4 5 6 7 7 7 7 7 6 5 4 3 2 2 3 4 5 6 7 7 7 7 7 6 5 4 3 2 2 3 4 5 6 7 7 7 7 7 6 5 4 3 2 2 3 4 5 6 7 7 7 7 7 6 5 4 3 2 2 3 4 5 6 7 7 7 7 7 6 5 4 3 2 2 3 4 5 6 6 6 6 6 6 6 5 4 3 2 2 3 4 5 5 5 5 5 5 5 5 5 4 3 2 2 3 4 4 4 4 4 4 4 4 4 4 4 3 2 2 3 3 3 3 3 3 3 3 3 3 3 3 3 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
[ ] 4977.345
179
225
89525·724·632·540·448·356·20·10·0
15·15
1 ≈≈==+++++++=B

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
6
Si observamos la matriz resultante de elevar el nivel de gris en dos unidades, podemos ver que si añadimos dos unidades al seis o al siete, no se obtiene un nivel de gris 9 y 8 respectivamente, sino que el máximo valor de nivel de gris en el ejemplo es 7.
Figura 6.4 Resultado de aumentar el brillo en una imagen.
b) El contraste.
Hace referencia la diferencia de niveles de gris que existe entre dos píxeles o
entre dos regiones de píxeles: En el ejemplo de la izquierda se puede observar que puede haber
diferencia de nivel de gris entre dos píxeles vecinos o entre dos grupos de píxeles. Además, podemos apreciar que el contraste será mayor cuanto mayor sea la diferencia entre niveles de gris, es decir, el contraste entre 1 y 7 es mayor que entre 0 y 1.
Mayor brillo pero Mayor contraste pero
Original igual contraste manteniendo el orden
Figura 6.5 Resultado de aumentar el contraste en una imagen.
1 1 1 1 1 1 1 0 1 1 1 0 1 0 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 7 7 7 7 7
2 9 2 192 199 192 2 19 2 2 9 2 192 199 192 2 19 2

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
7
c) La nitidez
Hace referencia la brusquedad del contraste, es decir, la nitidez alude a cuán son
de bruscos los cambios de niveles de gris entre píxeles:
Figura 6.6 Secciones de una imagen con fondo oscuro una línea blanca diferenciadas
por la nitidez.
Tal y como se puede observar en las secciones A-A y B-B, podemos decir que cuanto mayor sea la pendiente de los bordes o detalles, mayor nitidez tendrá la imagen hasta el caso límite de una pendiente vertical cuando se trata de una imagen binaria caso para el cual la nitidez es máxima.
Figura 6.7 Resultado de disminuir nitidez en una imagen.
0 0 0 0 0 0 0 … 0 255 0 … 0 0 0 0 0 0 0
SECCIÓN A-A
A A
0 … 0 32 64 128 255 128 64 32 0 … 0
SECCIÓN B-B
B B

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
8
6.3.2. Relaciones básicas entre píxeles.
a) Vecinos de un píxel.
Un píxel p de coordenadas (x,y) tiene cuatro vecinos horizontales y verticales
cuyas coordenadas viene dadas por:
( ) ( ) ( ) ( )1,,1,,,1,,1 −+−+ yxyxyxyx (3)
Este conjunto de píxeles, denominado los 4-vecinos de p, se representa por N4(p). Cada píxel está a una unidad de distancia de p, y algunos de los vecinos de p pueden caer fuera de la imagen digital si (x, y) está en el borde de la imagen.
Un píxel p de coordenadas (x,y) también tiene cuatro vecinos diagonales cuyas coordenadas viene dadas por:
( ) ( ) ( ) ( )1,1,1,1,1,1,1,1 −−+−−+++ yxyxyxyx (4)
y se representan por ND(p). Estos puntos, junto a los 4-vecinos, se denominan los 8-vecinos de p, y se representan por N8(p) – N8(p) = N4(p)∪ ND(p) -. Algunos de los vecinos de p pueden caer fuera de la imagen digital si (x, y) está en el borde de la imagen.
0 1 0
1 0 1
1 1 1
1 2 1
0 2 0
1 2 1
0 1 0
1 0 1
1 1 1
Figura 6.8. Conexiones: (a) 4-vecinos; (b) Vecinos diagonales; (c) 8-vecinos. b) Conectividad.
Este concepto es importante puesto que es empleado para establecer límites entre
objetos y los componentes de áreas de una imagen. Para determinar si dos píxeles están conectados, debe determinarse si son adyacentes en algún sentido (como ser 8-vecinos) y si sus niveles de gris cumplen un criterio especificado de similitud. Por ejemplo, en una imagen binaria, dos píxeles pueden ser 4-vecinos pero no estar conectados a menos que tengan el mismo valor. Se consideran tres tipos de conectividades:
a) 4-conectividad: Dos píxeles p y q con valores dentro de V están 4-conectados
si q pertenece a N4(p). b) 8-conectividad: Dos píxeles p y q con valores dentro de V están 8-conectados
si q pertenece a N8(p). c) m-conectividad (conectividad mixta): Dos píxeles p y q con valores dentro de
V están m-conectados si: i) q pertenece a N4(p), o bien ii) q pertenece a ND(p) y además el conjunto N4(p)∩N4(q) es vacío.

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
9
Figura 6.9 (a) Distribución de píxeles; (b) 8-vecinos del píxel central; (c) m-vecinos del mismo píxel. Las líneas a trazos son caminos entre ese píxel y sus vecinos.
c) Medidas de distancia.
Para los píxeles p, q y z, de coordenadas (x,y), (s,t) y (u,v) respectivamente, D es una función distancia o una métrica si:
a) D(p,q) ≥ 0 D(p,q) = 0 si y sólo si p = q. b) D(p,q) = D(q,p). c) D(p,z)≤ D(p,q)+ D(q,z).
La distancia euclídea entre p y q está definida por
( ) ( ) ( )22, tysxqpDe −+−= (5)
Para esta medida de distancia, los píxeles que están a una distancia menor o igual que algún valor r de (x,y) son los puntos contenidos en un círculo de radio r con centro en (x,y).
La distancia «city block» o Manhattan entre dos puntos p y q se define como:
( ) tysxqpD −+−=,4 (6)
En este caso, los píxeles que estén a una distancia, de (x,y), menor o igual que un determinado valor r forman un rombo centrado en (x,y). Por ejemplo, los píxeles de distancia D4 = 1 son los 4-vecinos de (x,y) y los de distancia 2 forman un contorno con forma de rombo.
La distancia tablero de ajedrez entre dos puntos p y q se define como:
( ) ( )tysxmáxqpD −−= ,,8 (7)
En este caso, los píxeles que estén a una distancia, de (x,y), menor o igual que un determinado valor r forman un cuadrado centrado en (x,y). Por ejemplo, los píxeles de distancia D8 = 1 son los 8-vecinos de (x,y) y los de distancia 2 forman un contorno con forma de cuadrado.
8 5 2 5 8
5 2 1 2 5
2 1 0 1 2
5 2 1 2 5
8 5 2 5 8
4 3 2 3 4
3 2 1 2 3
2 1 0 1 2
3 2 1 2 3
4 3 2 3 4
2 2 2 2 2
2 1 1 1 2
2 1 0 1 2
2 1 1 1 2
2 2 2 2 2

Tema 6 – Imágenes digitales BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
10
6.4. Bibliografía.
Tratamiento Digital de Imágenes. Rafael C. González, Richard E. Woods.
Visión por Computador. Gonzalo Pajares, Jesús M. de La Cruz.

BLOQUE II: SISTEMAS DE VISIÓN ARTIFICIAL.
TEMA VII: Procesamiento básico de imágenes.
7.1. Operaciones Aritmético / Lógicas 1
7.1.1. Operaciones Aritméticas 1
a) Adición 1
b) Sustracción 2
c) Multiplicación 3
d) División 3
7.1.2. Operaciones Lógicas 7
7.2. Operaciones basadas en Mapas de Transición 8
7.3. Procesado mediante técnicas de Histogramas 19
7.3.1. El histograma como una función de distribución 19
7.3.2. Ecualización del histograma 20
7.3.3. Especificación del histograma 22
7.4. Operaciones Geométricas 26
7.4.1. Operación de Traslación 26
7.4.2. Operación de Escalado 26
7.4.3. Operación de Rotación 27
7.5. Operaciones Morfológicas 29
7.5.1. Fundamentos de las operaciones morfológicas 29
7.5.2. Definiciones elementales 30
7.5.3. Operaciones morfológicas I: La dilatación 31
7.5.4. Operaciones morfológicas II: La erosión 33
7.5.5. Operaciones morfológicas III: Apertura y Cierre 34
7.5.6. Operaciones morfológicas con escalas de grises 36
7.5.7. Algunas aplicaciones de la morfología en imágenes de grises 37
7.6. Eliminación del ruido en el dominio espacial 38
7.6.1. Tipos de ruido 38
a) Gaussiano 38
b) Uniforme 39
c) Impulsivo 39
d) Rayleigh 39
e) Exponencial negativo 40
f) Gamma 40
7.6.2. Filtros de orden 41
a) Mediana 41
b) Moda 42
c) Mínimo 43
d) Máximo 44
e) Punto medio 45
f) Alfa recortado 46

7.6.3. Filtros de media 48
a) Aritmética 48
b) Geométrica 49
c) Armónica 50
d) Contra-armónica 51
e) YP 52
7.7. Bibliografía 17

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
1
7.1. Operaciones Aritmético / Lógicas.
Este tipo de operaciones está contenido dentro de las Transformaciones de
varias imágenes Punto a Punto, denominadas comúnmente Operaciones Puntuales. Se utiliza la información contenida en la misma localización (posición de los píxeles) de las imágenes de entrada f1(x,y), f2(x,y),… fn(x,y) para crear una nueva imagen resultado f(x,y)Res. De las operaciones que se realizan entre píxeles vamos a analizar la adición, sustracción, multiplicación y división. 7.1.1. Operaciones Aritméticas.
a) Adición.
La adición puede emplearse para reducir los efectos del ruido en la imagen (1) o
para aumentar la cantidad de brillo de una imagen (2). El valor de salida está dado por,
∑=
=n
iiyxyx pS
1,, (1)
∑=
+=n
iiyxyx cpS
1,, (2)
donde la variable px,yi hace referencia al píxel de coordenadas (x,y) de la imagen i-ésima y c es una constante definida por el usuario. Los valores finales de salida deben redondearse por exceso o por defecto y si la suma resulta un valor mayor a 255, directamente actualizaremos dicho píxel a 255. Si pensamos en la suma como herramienta de atenuación de ruido, podemos diseñar una estrategia de eliminación de ruido empleando la media aritmética, es decir,
∑=
=n
iiyxyx p
nS
1,,
1 (3)
donde n es la cantidad de imágenes que sumamos y la variable px,yi hace
referencia al píxel de coordenadas (x,y) de la imagen i-ésima. Tal y como se puede intuir, empleando el promedio de imágenes podemos ser capaces de disminuir o atenuar el ruido de una imagen hasta casi su desaparición.
En el siguiente ejemplo sumamos una gran cantidad de imágenes iguales en las
cuales aparecen ruidos repartidos aleatoriamente. Aplicando la suma promediada conseguiremos atenuar el ruido de las mismas:
Figura 7.1 Resultado del empleo de la adición para la atenuación de ruido.
=
+ ····· +
+

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
2
b) Sustracción.
La sustracción en imágenes es una técnica útil para detectar el cambio producido
en dos imágenes que han sido capturadas en dos instantes de tiempo diferentes (4). También pueden representar pérdidas de calor o frío si la fuente de datos es el espectro infrarrojo. O también, para disminuir la cantidad de brillo de una imagen (5).
El valor de salida está dado por,
∑=
−=n
iiyxyxyx ppR
2,1,, (4)
∑=
−=n
iiyxyx cpR
1,, (5)
donde la variable px,yi hace referencia al píxel de coordenadas (x,y) de la imagen
i-ésima y c es una constante definida por el usuario. Es necesario definir la salida de alguna manera que haga todos los valores positivos. Podemos tomar como regla general que cualquier resultado de restar dos píxeles debe estar entre 0 y 255, por lo que si en alguna resta se obtiene un valor por debajo de cero directamente actualizamos a cero.
(a) (b)
(c)
Figura 7.2. Uso de la resta: (a) Radiancia antes de energizar; (b) Radiancia después de energizar; (c) Resta de ambas imágenes.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
3
c) Multiplicación.
La multiplicación de imágenes podría utilizarse para corregir efectos de una
mala iluminación puesto que, con esta operación, multiplicamos por una constante el nivel de gris de cada píxel de la imagen (de igual modo podríamos usarlo para disminuir los niveles de gris). El valor de salida está dado por,
∑=
=n
iiyxyx pcM
2,, · (6)
En el siguiente ejemplo podemos observar que es posible mejorar una imagen
muy oscura. Por tanto, para casos de defecto de iluminación es conveniente realizar una operación de multiplicación para contrarrestar dichos efectos negativos.
Figura 7.3. Empleo de la multiplicación para la contrarrestar una mala iluminación.
d) División.
La división de imágenes podría utilizarse para poder discernir entre dos
imágenes distintas puesto que, con esta operación, dividimos elemento a elemento el nivel de gris de cada píxel de la imagen. Con ello conseguimos que el píxel de la imagen resultante sea uno cuando coinciden y distinto de la unidad cuando no coincidan. La imagen final sería aquella en la que los términos distintos a la unidad se multipliquen por 0. El valor de salida está dado por,
<
=
=1·
1255
,
,
,
,
,
,
,
yx
yx
yx
yx
yx
yx
yx
b
aSi
b
ak
b
aSi
D (7)
Figura 7.4. Empleo de la división para la detección de cambios entre imágenes.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
4
Código implementado utilizando MatLAB:
function suma( A , B ) [ f c ] = size( A ); C = zeros( f , c ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j ) + B( i , j ) < 255 ) C( i , j ) = A( i , j ) + B( i , j );
else C( i , j ) = 255;
end end end return function sumapromedio( A ) [ f c n ] = size( A ); B = zeros( f, c ); for i = 1 : 1 : c for j = 1 : 1 : f
B( i , j ) = 0; for k = 1 : 1 : n
B( i , j ) = A( i , j , k ) + B( i , j ); end
B( i , j ) = B( i , j ) / n; end end return function sumabrillo( A , b ) [ f c ] = size( A ); B = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j ) + b < 255 ) C( i , j ) = A( i , j ) + b;
else C( i , j ) = 255;
end end end

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
5
function multiplica ( A , b ) [ f c ] = size( A ); B = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j )*b < 255 ) B( i , j ) = A( i , j )*b;
else C( i , j ) = 255;
end end end return
function resta( A , B ) [ f c ] = size( A ); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j ) − B( i , j ) > 0 ) C( i , j ) = A( i , j ) − B( i , j );
else C( i , j ) = 0;
end end end return function restabrillo( A , b ) [ f c ] = size(A ); B = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j ) − b > 0 ) B( i , j ) = A( i , j ) − b;
else C( i , j ) = 0;
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
6
function division( A , B ) [ f c ] = size( A ); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if (A( i , j ) / B( i , j ) == 1) C( i , j ) = 255;
else C( i , j ) = round( 100*A( i , j ) / B( i , j ) );
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
7
7.1.2. Operaciones Lógicas.
Con el proceso de binarización conseguimos obtener una imagen de salida que
posee únicamente dos niveles de gris 0 y 255. Si consideramos estos dos niveles como el 0 lógico y el 1 lógico, respectivamente, obtenemos finalmente una imagen binaria lógica. Con una imagen de estas características es posible realizar sobre ella todo tipo de operaciones lógicas como pueden ser la operación AND, OR, XOR y NOT.
(a) (b) (c)
(e) (f) (g)
Figura 7.5. Operaciones Lógicas: (a) Imagen A; (b) Imagen B; (c) NOT a la imagen B; (d) AND de ambas imágenes; (e) OR de ambas imágenes; (f) XOR de ambas imágenes.
También es posible realizar sobre dos imágenes dadas otro tipo de operaciones tales como <, ≤, >, ≥,… Por ejemplo, dadas dos imágenes A y B obtener una tercera C tal que C = A ≤ B.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
8
Código implementado utilizando MatLAB:
function and( A , B ) [ f c ] = size(A); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) == 255 ) & ( B( i , j ) == 255 ) ) C( i , j ) = 255;
else C( i , j ) = 0;
end end end return function or( A , B ) [ f c ] = size(A); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) == 255 ) | ( B( i , j ) == 255 ) ) C( i , j ) = 255;
else C( i , j ) = 0;
end end end return function xor( A , B ) [ f c ] = size(A); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) == 255 ) xor ( B( i , j ) == 255 ) ) C( i , j ) = 255;
else C( i , j ) = 0;
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
9
function not( A ) [ f c ] = size(A); C = zeros( size( A ) ); for i = 1 : 1 : c for j = 1 : 1 : f
if ( A( i , j ) == 255 ) C( i , j ) = 0;
else C( i , j ) = 255;
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
10
7.2. Operaciones basadas en Mapas de Transición.
Las operaciones basadas en mapas de transición implican la generación de una
nueva imagen modificando el valor del píxel original basándose en una regla global aplicada a cada píxel de la imagen de entrada, es decir, el proceso consiste en obtener el valor del píxel de una imagen origen, modificarlo por una operación lineal o no lineal, y colocar el nuevo valor del píxel en su correspondiente localización dentro de la imagen destino. El mapa de transición es una transformación uno a uno puesto que el operador ψ se aplica a cada píxel en la imagen y la salida depende únicamente de la magnitud correspondiente al píxel de entrada siendo independiente de los píxeles adyacentes. Durante esta parte del análisis de mapas de transición trabajaremos con imágenes con valores de gris en el rango de 0 a 255. En una imagen podemos distinguir tres zonas:
• Zona de puntos oscuros (A): En esta zona está implícita la información del fondo de la imagen. • Zona de puntos claros (C): Al igual que en la zona anterior, también esta contenida la información del fondo de la imagen. • Zona de puntos intermedios (B): Esta zona, por otro lado, recoge toda la información del objeto que estamos analizando.
Observando las gráficas podemos intuir que cuanto mayor sea la pendiente de la
recta, tendremos un contraste mayor puesto el hecho de que la pendiente sea mayor, implica que los niveles de gris estén más juntos, por lo que el salto de uno a otro es más alto (misma altura pero menor incremento horizontal).
Figura 7.6. Mapa de transición con zonas A, B y C definidas.
Transiciones de tipo Clipping: En este tipo de transiciones se eliminan los
niveles de gris pertenecientes al fondo (grupo de niveles altos y de niveles bajos) inhibiendo así el contraste del fondo para poder aumentárselo al objeto.
Transiciones de umbralización: Este tipo de mapa de transición es empleando para imágenes donde el fondo tiene un nivel de gris constante (por ejemplo, el fondo es completamente negro) y por tanto, aumentamos el contraste del objeto en detrimento del fondo.
Transiciones no lineales: Generalmente, estos mapas son empleados para realzar los niveles de gris más significativos de la imagen dando así a la imagen un aspecto apto para el análisis en determinados casos como por ejemplo para la utilización de la Transformada de Fourier.
C B A
x
y
aψ
a b c
bψ cψ
α
β
γ

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
11
Los mapas de transición más utilizados hoy en día en el tratamiento digital de imágenes son los siguientes:
a) Operador Identidad.
Este operador crea una imagen de salida que es idéntica a la imagen de entrada.
La función de transformación es:
pq = (8)
b) Operador Inverso o Negativo.
Este operador crea una imagen de salida que es la inversa de la imagen de
entrada (utilizado en diversas aplicaciones tales como imágenes médicas). La función de transformación es:
pq −= 255 (9)
c) Operador Umbral.
Este operador crea una imagen de salida binaria a partir de una imagen de grises,
donde el nivel de transición está dado por el parámetro c. La función de transformación es:
>≤
=cp para
cp paraq
255
0 (10)
d) Operador Umbral invertido.
Este operador crea una imagen de salida binaria invertida a partir de una imagen
de grises, donde el nivel de transición está dado por el parámetro c. La función de transformación es:
>≤
=cp para
cp paraq
0
255 (11)
e) Operador Intervalo de Umbral binario.
Esta clase de transformación crea una imagen de salida binaria a partir de una
imagen de grises, donde todos los valores de gris cuyo nivel está en el intervalo definido por p1 y p2 son transformados a 255 y todos los valores fuera de ese intervalo a 0. La función de transformación es:
><≤≤
=21
21
0
255
ppopp para
ppp paraq (12)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
12
f) Operador Intervalo de Umbral binario invertido.
Esta clase de transformación crea una imagen de salida binaria a partir de una
imagen de grises, donde todos los valores de gris cuyo nivel está en el intervalo definido por p1 y p2 son transformados a 0 y todos los valores fuera de ese intervalo a 255. La función de transformación es:
><≤≤
=21
21
255
0
ppopp para
ppp paraq (13)
g) Operador de Umbral de escala de grises.
Esta clase de transformación crea una imagen de salida con los únicos valores de
nivel de gris comprendidos en el intervalo definido por p1 y p2 y el resto a 255. La función de transformación es:
><≤≤
=21
21
255 ppopp para
ppp parapq (14)
h) Operador de Umbral de escala de grises invertido.
Esta clase de transformación crea una imagen de salida con los únicos valores de
nivel de gris invertidos comprendidos en el intervalo definido por p1 y p2 y el resto a 255. La función de transformación es:
≥≤≤≤−
=21
21
255
255
ppopp para
ppp parapq (15)
i) Operador de extensión.
Esta clase de operadores proporciona una imagen de salida con la escala de
grises completa correspondiente al intervalo de entrada definido por p1 y p2 y suprime todos los valores fuera de este rango. La función de transformación es:
( )
≥≤
≤≤−
−=
21
2112
1
0
255
ppopp para
ppp parapp
ppq (16)
j) Operador reducción de niveles de gris.
Esta clase de operadores proporciona una imagen de salida con un menor
número de niveles de gris respecto de la imagen original de entrada.. La función de transformación es:
≤<
≤<≤
=
− 255
0
1
211
1
pp paraq
ppp paraq
pp para
q
nn
MM (17)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
13
k) Mapa de transición logarítmico.
Esta clase de operadores proporciona una imagen de salida con el mismo nivel
de gris pero les da una "importancia" distinta ya que los niveles se reparten mediante el criterio logarítmico de las décadas. La función de transformación es:
( )qCq += 1log (18)
donde C es una constante adecuada de reescalado de la imagen, que se aplica
para obtener valores dentro de la paleta de colores disponible.
l) Mapa de transición exponencial.
Esta clase de operadores proporciona una imagen de salida con el mismo nivel
de gris pero les da una "importancia" distinta ya que los niveles se reparten mediante el criterio exponencial. La función de transformación es:
( )12
−= qeCq (19)
donde C es una constante adecuada de reescalado de la imagen, que se aplica para obtener valores dentro de la paleta de colores disponible.
En cuanto a la representación gráfica de los mapas de transición, podemos decir que éstos son curvas en el plano xy (espacio bidimensional) donde la variable x hace referencia a al nivel de la imagen origen (o inicial) mientras que la otra variable y identifica a los niveles de gris de la imagen destino (o final).
Puesto que la derivada de una función nos indica la máxima variación, la derivada de un mapa de transición describe el carácter del contraste (recordemos que el contraste definía la diferencia de niveles de gris en una imagen). Para el caso particular de un mapa de transición con forma de recta tenemos que la pendiente tg(α) de dicha recta nos informa de manera directa como es el contraste.
Figura 7.7. Forma generalizada de un mapa de transición.
x
y
Nivel de gris de la imagen de entrada Le
sL
eL
Nivel de gris de la im
agen de entrada L
s
x
y
sL α

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
14
Figura 7.8. Mapas de transición y sus respectivas imágenes. ¡¡¡¡¡¡¡NO HE PODIDO PONER UNA IMAGEN PARA CADA MAPA!!!!!!!
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 2553p
1q
2q
1−nq
1−np
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 255
255
0 p
q
1p 2p 255
255
0 p
q
c255255
255
0 p
q
255
255
0 p
q
c255
255
0 p
q

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
15
Código implementado utilizando MatLAB:
function operador_identidad( A ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
B( i , j ) = A( i , j ); end end return function operador_invertido( A ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
B( i , j ) = 255 − A( i , j ); end end return function operador_umbral( A , u ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if (A( i , j ) < u) C( i , j ) = 0;
else C( i , j ) = 255;
end end end return function operador_umbral_invertido( A , u ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if (A( i , j ) < u) C( i , j ) = 255;
else C( i , j ) = 0;
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
16
function operador_umbral_binario( A , Linf, Lsup ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) < Lsup ) & ( A( i , j ) > Linf )) C( i , j ) = 255;
else C( i , j ) = 0;
end end end return function operador_umbral_binario_invertido( A , Linf, Lsup ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) < Lsup ) & ( A( i , j ) > Linf )) C( i , j ) = 0;
else C( i , j ) = 255;
end end end return function operador_umbral_grises( A , Linf, Lsup ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) < Lsup ) & ( A( i , j ) > Linf )) C( i , j ) = A( i , j );
else C( i , j ) = 255;
end end end

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
17
function operador_umbral_grises_invertido( A , Linf, Lsup ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) < Lsup ) & ( A( i , j ) > Linf )) C( i , j ) = 255 − A( i , j );
else C( i , j ) = 255;
end end end return function operador_extensión( A , Linf, Lsup ) [ f c ] = size(A); B = zeros(size(A)); for i = 1 : 1 : c for j = 1 : 1 : f
if ( ( A( i , j ) < Lsup ) & ( A( i , j ) > Linf )) C( i , j ) = 255*( A( i , j ) − Lsup ) / ( Linf − Lsup );
else C( i , j ) = 0;
end end end return function operador_escala_grises( A , valores ) [ f c ] = size(A); B = zeros(size(A)); [ n m ] = size( valores ); for i = 1 : 1 : c for j = 1 : 1 : f
for k = 1 : 1 : m − 1 if ( ( A( i , j ) < valores( 1 , k ) ) & ( A( i , j ) > valores( 1 , k + 1 )))
C( i , j ) = valores( 2 , k ); end
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
18
function operador_logaritmico( A , k ) [ f c ] = size(A); B = zeros(size(A)); [ n m ] = size( valores ); for i = 1 : 1 : c for j = 1 : 1 : f
C( i , j ) = k*log(1 + A( i , j ) ); end end return function operador_esxponencial( A , k ) [ f c ] = size(A); B = zeros(size(A)); [ n m ] = size( valores ); for i = 1 : 1 : c for j = 1 : 1 : f
C( i , j ) = k*exp( A( i , j )^2 − 1); end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
19
7.3. Procesado mediante técnicas de Histogramas.
¿Cómo calcular un mapa de transición? Como ya hemos podido observar, una
primera aproximación a lo que va a ser el mapa de transición que estamos buscando es aquel que aumente el contraste en la zona oscura (es decir, la zona que hace referencia al fondo) pues la información que estamos analizando no reside en el fondo sino que está en el objeto que estemos considerando. 7.3.1. El histograma como una función de distribución.
Una técnica muy común para el tratamiento de las imágenes y así estudiarlas, es
aquella basada en el procesado mediante histogramas. Un histograma se define como la
función de distribución de los niveles de gris que existe en la imagen. Es decir, se trata de una función cuya variable x se corresponde con uno de los 255 niveles de gris y la función y es justo el número de puntos que tiene ese nivel de gris en concreto. Por ejemplo, imaginemos una imagen con 8 niveles de gris cuya distribución es la siguiente:
Nivel 0 1 2 3 4 5 6 7 Número de píxeles 3.160 4.092 3.400 2.624 1.316 980 488 324
Puesto que es una función de probabilidad, debemos calcular el número total de
píxeles y determinar así, para cada nivel de gris, la probabilidad de encontrar un píxel con un determinado nivel de gris. Sabiendo que el número total de píxeles para esta imagen de 128 × 128 es de 16.384 píxeles, sabemos que la probabilidad de encontrar un píxel que tenga un nivel de gris i es justo la cantidad de píxeles que tiene nivel de gris i entre el número total:
( ) 193,0384.16
160.30 ==NP ( ) 250,0
384.16
092.41 ==NP
( ) 208,0384.16
400.32 ==NP ( ) 160,0
384.16
624.23 ==NP
( ) 080,0384.16
316.14 ==NP ( ) 060,0
384.16
9805 ==NP
( ) 030,0384.16
4886 ==NP ( ) 020,0
384.16
3247 ==NP
0,000
0,050
0,100
0,150
0,200
0,250
Pro
babi
lidad
0 1 2 3 4 5 6 7
Nivel de gris
Histograma
Figura 7.9. Histograma del ejemplo.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
20
Sabiendo la forma del histograma, aunque no dispongamos de la imagen en cuestión, seremos capaces de distinguir objetos o entes del fondo, puesto que midiendo la anchura de las bandas que puedan aparecer en el histograma podremos tomar decisiones al respecto. El criterio a seguir es el siguiente: Fondo Zonas del histograma más estrechas. Esto se puede deducir de manera intuitiva pensando que las zonas más estrechas de histograma son aquellas en las cuales existe un menor contraste puesto es en el fondo donde se producen las variaciones más pequeñas entre niveles de gris (el fondo suele tener grises muy parecidos). Objeto Zonas del histograma más anchas. De igual modo al caso anterior, podemos pensar que la razón par la cual al objeto le corresponden los mayores contrastes puesto que en el objeto se produce un "salto" de contraste y porque los objetos suelen tener detalles provocando cambios de nivel de gris.
Figura 7.10. (a) Imagen en escala de grises de 32; (b) Histograma definido.
Como conclusión, podemos decir que los histogramas se emplean con la
intención de mejorar el contraste, de modo que, mediante un proceso usando histogramas, conseguimos diferenciar más cada nivel de gris de los demás incrementado así el contraste. Este proceso de igualación normalizada se conoce con el nombre de ecualización de histogramas. 7.3.2. Ecualización del Histograma.
Supongamos que la transformación que estamos estudiando es s = T (r) siendo r
un valor de nivel de gris en la imagen original y s su valor en la imagen ecualizada. Entonces el primer objetivo será que el rango dinámico de los valores de s sea al máximo posible, lo que en condiciones de pantallas normales significa [ 0 , 255 ]. Para que la función T además de conseguir el objetivo de alargar el rango dinámico de los valores de niveles de gris no introduzca perturbaciones sobre la imagen debemos imponer algunas condiciones sobre dicha función. Por ahora impondremos tan solo dos condiciones:
• En el intervalo de valores de r, T(r) debe ser una función monótona creciente. • 0 ≤ T(r) ≤ 255, para 0 ≤ r ≤ 255.
Fondo Hombre con la cámara

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
21
La primera condición preserva el orden en los píxeles desde el negro al blanco y la segunda condición garantiza que la función T conserva sus valores dentro del rango permitido.
Existen infinitas curvas que verifican estas condiciones, de hecho cualquier curva plana que una el origen de coordenadas con el punto (255,255) de manera que no tenga ni máximos ni mínimos y cuyo grafo se mantenga dentro del cuadrado definido por los puntos (0,0), (255,0), (0,255) y (255,255) verifica las condiciones establecidas.
Para seleccionar una curva con un comportamiento adecuado a nuestros deseos debemos y podemos considerar que estas funciones son distribuciones acumuladas de probabilidad, aunque para ello ahora supongamos que el rango de definición de los valores r y s están en [ 0 , 1 ] en lugar de [ 0 , 255 ]. Esta hipótesis no resta ninguna generalidad al análisis.
Un resultado elemental de la teoría de la probabilidad establece que si
tenemos una variable aleatoria R, que en nuestro caso sería la función que asigna valor de nivel de gris a cada píxel, la transformación de dicha variable aleatoria por la
función acumulada de probabilidad de dicha variable aleatoria, PR(R), define una
distribución uniforme de valores. Es decir, que si consideramos T = PR, el conjunto de valores de s resultante de la transformación s = T (r) sigue una distribución uniforme.
(a) (b)
(c) (d)
Figura 7.11. Ecualización de histogramas: (a) Imagen original; (b) Histograma original; (d) Imagen ecualizada; (d) Histograma ecualizado.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
22
Ya que una distribución uniforme supone que todos los puntos tienen la misma masa de probabilidad, parece de interés que usemos esta función T como medio de redistribuir la masa de puntos asignada a los distintos niveles de gris. En cada caso particular debemos de construir la función T a partir de la imagen de la siguiente manera:
( )
∑=
=k
j
jk
N
nrT
0255 (20)
para k = 0, 1, 2,…, 255. Donde N representa el número total de píxeles en la
imagen, y nj el número de píxeles con nivel de gris j. 7.3.3. Especificación del Histograma.
Una generalización de la técnica anterior nos permitirá transformar una imagen
cuyo histograma sea una distribución uniforme, a otra imagen cuya forma de histograma este definido por nosotros. Como ya mencionamos al principio de esta lección puede ser de interés transformar el histograma de la imagen original de manera que la imagen resultante tenga un histograma definido por una función en forma de campana (gaussiana).
Figura 7.12. Obtención de una imagen (conocido su histograma) a partir de otra.
De este modo conseguimos, a partir de una imagen con un determinado
histograma, otra imagen incógnita cuyo histograma era uno deseado. En definitiva, podemos deducir que la imagen se obtiene matemáticamente empleando la siguiente expresión:
( )( ) ( )ττ 11 −− =Σ⇔=Σ GTTG o (21)
τ
ζ
ζ = T(τ)
τ = T-1
(ζ)
Σ
Ξ
Ξ = G(Σ)
Σ = G-1
(Ξ)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
23
Para llevar a cabo esta transformación habrá que hacer uso de nuevo del resultado antes mencionado de la teoría de la probabilidad. Ahora tendremos que hacer dos transformaciones para conseguir el objetivo,
• Transformar la imagen original a una imagen con un histograma definido por la distribución uniforme: s = T (r) siendo T la función definida antes.
• Calcular la función inversa del histograma acumulado que queremos que tenga la imagen final: G-1. Si queremos una imagen con un histograma definido por una gaussiana tendremos que calcular la función inversa de la función acumulada gaussiana.
• Transformar de nuevo la imagen haciendo uso de la expresión z = G-1
(s).
La primera transformación nos permite pasar de una imagen con unas características dadas por la forma de su histograma a una imagen con un histograma que aproxima una distribución uniforme, y la segunda transformación nos permite pasar de dicha imagen "neutra" a una nueva imagen cuyo histograma tiene la forma dada por la función G. En resumen, hemos calculado una nueva imagen a partir de la original usando la transformación z = G
-1(T(r)).
En la práctica la función puede ser calculada de diversas maneras. Si conocemos
su expresión analítica entonces tan solo tenemos que calcular su valor, pero si no es así podemos usar una versión digitalizada de la gráfica de función G (histograma acumulado) y a partir de dicha versión digitalizada aproximar el valor que estamos calculando.
Si observamos como son las dos transformaciones antes comentadas podemos ver que la primera transforma valores del eje x en valores del eje y a través de T, y la segunda transforma los valores del eje en valores del eje x a través de G. Ejemplo.
En una imagen de 128 × 128 píxeles con 8 niveles de gris se tiene la siguiente distribución:
Nivel 0 1 2 3 4 5 6 7 Número de píxeles 3.160 4.092 3.400 2.624 1.316 980 488 324
Se quiere pasar a una imagen cuyo histograma final sea:
Nivel 0 1 2 3 4 5 6 7 Probabilidad 0 0 0 0,15 0,2 0,3 0,2 0,15
Puesto que es una función de probabilidad, debemos calcular el número total de
píxeles y determinar así, para cada nivel de gris, la probabilidad de encontrar un píxel con un determinado nivel de gris: Sabiendo que el número total de píxeles para esta imagen de 128 × 128 es de 16.384 píxeles, sabemos que la probabilidad de encontrar un píxel que tenga un nivel de gris i es justo la cantidad de píxeles que tiene nivel de gris i entre el número total.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
24
( ) 1929,0384.16
160.30 ==NP ( ) 2497,0
384.16
092.41 ==NP
( ) 2075,0384.16
400.32 ==NP ( ) 1601,0
384.16
624.23 ==NP
( ) 0803,0384.16
316.14 ==NP ( ) 0598,0
384.16
9805 ==NP
( ) 0298,0384.16
4886 ==NP ( ) 0197,0
384.16
3247 ==NP
0,000
0,050
0,100
0,150
0,200
0,250
Pro
bab
ilid
ad
0 1 2 3 4 5 6 7
Nivel de gris
Histograma
0
0,05
0,1
0,15
0,2
0,25
0,3
Nivel de gris
0 1 2 3 4 5 6 7
Nivel de gris
Histograma deseado
Figura 7.13. Histogramas del ejemplo.
1ª Imagen. Normalización:
07
00 ==r 1428,0
7
11 ==r 2857,0
7
22 ==r 4285,0
7
33 ==r
5714,07
44 ==r 7143,0
7
55 ==r 8571,0
7
66 ==r 1
7
77 ==r
Función acumulativa:
Nivel 0 1 2 3 4 5 6 7 Número de
píxeles 0,1929 0,2497 0,2075 0,1601 0,0803 0,0598 0,0298 0,0197
F. Acumulativa 0,1929 0,4426 0,6501 0,8103 0,8906 0,9504 0,9802 1
Vinculamos valores normalizados con la función acumulativa:
Nivel 0 1 2 3 4 5 6 7 F. Acumulativa 0,1929 0,4426 0,6501 0,8103 0,8906 0,9504 0,9802 1 Normalizados 1 3 5 6 6 1 1 1

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
25
2ª Imagen. Normalización:
4285,07
30 ==r 5714,0
7
41 ==r 7143,0
7
52 ==r 8571,0
7
63 ==r
8571,07
64 ==r 1
7
75 ==r 1
7
76 ==r 1
7
77 ==r
Función acumulativa:
Nivel 0 1 2 3 4 5 6 7 Número de píxeles 0 0 0 0,15 0,2 0,3 0,2 0,15
F. Acumulativa 0 0 0 0,15 0,35 0,65 0,85 1
Vinculamos valores normalizados con la función acumulativa:
Nivel 0 1 2 3 4 5 6 7 F. Acumulativa 0 0 0 0,15 0,35 0,65 0,85 1 Normalizados 3 4 5 6 6 7 7 7
Mapa de Transición
0
1
2
3
4
5
6
7
0 1 2 3 4 5 6 7
Nivel de gris
Niv
el d
e gr
is
Figura 7.14. Mapa de transición solución.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
26
7.4. Operaciones Geométricas.
A menudo, para el análisis de imágenes, queremos investigar más
específicamente un área dentro de una imagen, llamada Región de Interés. Para hacer esto necesitamos operaciones que modifiquen las coordenadas espaciales de la imagen, las cuales se denominan operaciones geométricas. El objetivo fundamental de una operación geométrica es la transformación de los valores de una imagen tal y como podría observarse desde otro punto de vista.
Así las operaciones de magnificar o reducir una imagen, no es sino aproximar o alejar el punto de vista, rotarla equivale a girar el punto de vista de observación, trasladarla es hacer lo propio con dicho punto. 7.4.1. Operación de Traslación.
− ∂x posiciones eje x.
Dado un punto P(x,y) lo trasladaremos − ∂y posiciones eje y.
Esto supone que el punto final será P'(x',y') donde x' = x + ∂x e y' = y + ∂y.
Usaremos notación vectorial :
TPPy
xT
y
xP
y
xP +=⇒
∂∂
=
=
= ';;
'
''; (22)
Figura 7.15. Operación de traslación.
7.4.2. Operación de Escalado.
Tendremos dos factores sx y sy para cada eje siendo el factor en el que va a
cambiar la figura en cada eje. Las posiciones cambiarán de la siguiente forma:
y
x
syy
sxx
·'
·'
==
(23)
Vectorialmente:
PSPy
x
s
s
y
x
y
x·'·
0
0
'
'=⇒
=
(24)
(4,4) (6,4)
(7,1) (9,1)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
27
Cuando escalamos estamos también variando su posición con respecto al origen de coordenadas.
Escalado diferencial Es aquel en el que los factores son distintos sx ≠ sy Escalado uniforme si sx = sy
Figura 7.16. Operación de escalado.
Podemos diferenciar entre los dos siguientes tipos de escalado, en función de
cómo se realice el mismo:
2 2 5 5
2 2 2 2 5 5
2 2 Réplica 2 2 5 5
2 2 2 2 2 2 5 5
6 6 6 6 Píxel único 2 5
2 2 2 2 Interpolación 2 5 2 3 4 5
6 6 6 6 2 3 4 5
4 4 Interpolación 2 3 4 5
4 4 2 3 4 5
AMPLIACIÓN REDUCCIÓN
7.4.3. Operación de rotación.
Se rota y se desplaza con respecto al origen. Haremos:
( ) ( )( ) ( )θθ
θθsincos'
sincos'
xyy
yxx
+=−=
(25)
De forma vectorial:
( ) ( )( ) ( ) PRP
y
x
y
x·'·
cossin
sincos
'
'=⇒
−=
θθθθ
(26)
(4,4) (6,4)
(2,2) (3,2)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
28
Si los ángulos son positivos el giro es en sentido contrario a las agujas del reloj.
Si los ángulos son negativos el giro es en sentido de las agujas del reloj. NOTA:
( ) ( )( ) ( )θθ
θθsinsin
coscos
=−=−
(27)
Figura 7.17. Operación de rotación.
(5,2) (9,2)
(4’9,7’8)
(2’1,4’9)

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
29
7.5. Operaciones morfológicas.
La morfología matemática está basada en la geometría y la forma. Las
operaciones morfológicas simplifican las imágenes y preservan las formas principales de los objetos.
En visión artificial es frecuente utilizar la morfología para el tratamiento de regiones en el sentido de determinar cómo se pueden cambiar, contar o evaluar. La morfología puede utilizarse para las siguientes tareas:
• Suavizar los bordes de una región. Esto es útil, por ejemplo, se necesita mejorar un borde, ya que usando técnicas de segmentación estándar, los bordes se presentan generalmente ruidosos debido tanto al proceso de captura como a los procesas de segmentación apareciendo sobre ellos pequeños valles o protuberancias, que pueden suprimirse mediante transformaciones morfológicas.
• Separar determinadas regiones que el proceso de segmentación las presenta unidas.
• Unir regiones que han sido separadas durante la segmentación.
Las operaciones matemáticas tienen su principal aplicación en imágenes binarias y los fundamentos matemáticos fueron concebidos desde el punto de vista de la posición antes que desde la intensidad. En las secciones de dilatación, erosión, apertura y cierre nos centraremos exclusivamente en la aplicación de la morfología a las imágenes binarias para luego extender el estudio a las imágenes de grises. 7.5.1. Fundamentos de las operaciones morfológicas.
Puesto que una imagen binaria puede tratarse como un conjunto de puntos 2D,
podemos decir que un punto representa un par de enteros que corresponden a las coordenadas de la imagen digital. Los puntos que pertenecen a los objetos en la imagen representan un conjunto X con valores binarios igual al uno lógico. Los puntos del conjunto complementario XC corresponden al fondo con valores binarios igual a cero.
Fijándonos en el ejemplo de la izquierda, tenemos el
origen marcado con un punto con coordenadas (0,0) y las coordenadas de cualquier punto se interpretan como (posición de la fila, posición de la columna) con respecto al origen.
Por tanto, los conjuntos serán:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 4,4,3,4,2,4,1,4,0,4,4,3,1,3,0,3,4,2,1,2,0,2,4,1,0,1,4,0,0,0
3,3,2,3,3,2,2,2,3,1,2,1,1,1,3,0,2,0,1,0
==
CX
X
Una transformación morfológica φ viene dada por la relación de la imagen X con
otro pequeño conjunto de puntos B, llamado elemento estructural. B se expresa con respecto a un origen local O (llamado punto representativo).
•
00000
01100
01100
01110
01110

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
30
Existen una serie de elementos representativos muy utilizados cuyos conjuntos de puntos tienen la siguiente expresión:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1,0,1,0
0,1,1,0,0,0,1,0,0,1
1,1,0,1,1,1,1,0,0,0,1,0,1,1,0,1,1,1
3
2
1
−=−−=
−−−−−−=
B
B
B
[ ]101
1
111
1
111
111
111
•
•
•
La transformación morfológica φ(X) aplicada a la imagen X significa que el
elemento estructural B se desplaza por toda la imagen. Suponiendo que B se posiciona sobre algún punto de la imagen, el píxel de la imagen correspondiente al punto representativo O de B se denomina píxel actual. El resultado obtenido de la relación entre la imagen X y el elemento estructural B en la posición actual se almacena en el píxel actual de la imagen. 7.5.2. Definiciones elementales.
a) Dualidad.
La dualidad de operaciones morfológicas se deduce de la existencia del
conjunto complementario; de modo que para cada transformación morfológica φ(X) existe una transformación dual φ*
(X) tal que,
( ) ( )[ ]CC XX = φφ * (28)
b) Traslación.
La traslación del conjunto de puntos X por el vector hr
se denota por Xh y se define como,
XxhxdEdX h ∈∀+=∈= rrrrr:2 (29)
A continuación veremos un ejemplo de traslación por el vector hr
= (0,1). Este desplazamiento se ejecuta moviendo "cero filas" y "una columna":
( )
•
→
•
00100
00110
01100
00100
00100
00010
00011
00110
00010
00010
0,1hX Traslación

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
31
c) Complemento de un conjunto.
El complemento de un conjunto X es aquel conjunto que contenga todos los valores que no se encuentren en X, es decir,
XxxX C ∉∋= (30)
d) Diferencia de dos conjuntos.
La diferencia de dos conjuntos X e Y es aquel conjunto que contenga todos los valores que se encuentren en X pero que no estén en Y, es decir,
YxXxxYX ∉∈∋=− , (31) 7.5.3. Operaciones morfológicas I: La dilatación.
La transformación morfológica de la dilatación ⊕ combina dos conjuntos
utilizando la adición de vectores (o adición de conjuntos de Minkowski). Por definición, la dilatación X ⊕ B es el conjunto de puntos de todas las posibles adiciones vectoriales de pares de elementos, uno de cada conjunto X y B.
BbyXxbxdEdBX ∈∀∈∀+=∈=⊕rrrrrr
:2 (32)
Gráficamente, la dilatación se realiza como sigue: Se va recorriendo la imagen, por ejemplo, de izquierda a derecha y de abajo arriba y, donde nos encontremos un 1, situamos el origen del elemento estructural sobre ese 1. En esa posición se realiza la unión del elemento estructural con la parte de la imagen sobre la que se solapa dicho elemento: superponemos el elemento estructural a la imagen.
A continuación veremos una serie de ejemplos sobre la dilatación: Ejemplo 1:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2,3,2,2,3,1,2,0,1,3,0,3,1,2,0,2,2,1,1,0
1,0,0,0
1,3,0,3,1,2,0,2,2,1,1,0
=⊕==
BX
B
X
[ ]
•
=•⊕
•
00000
00111
00111
01100
00110
11
00000
00011
00011
00100
00010

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
32
Ejemplo 2:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 5,4,5,3,3,3,2,3,2,2,3,2,3,1,2,0,3,4,3,3,1,3,0,3,1,2,0,2,1,1,0,0
1,0,1,0
4,4,4,3,2,3,1,3,2,2,1,2,2,1,1,0
=⊕−=
=
BX
B
X
[ ]
=•⊕
•
101000
101111
000111
001010
001010
101
10000
10110
00110
00100
00010
Ejemplo 3:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 5,4,5,3,3,3,2,3,2,2,3,2,3,1,2,0,3,4,3,3,1,3,0,3,1,2,0,2,1,1,0,0
1,0,1,0
4,4,4,3,2,3,1,3,2,2,1,2,2,1,1,0
=⊕−=
=
BX
B
X
=
•⊕
•
110000
111110
011110
001110
000110
000010
11
01
10000
10110
00110
00100
00010
La dilatación tiene varias propiedades interesantes que permiten su fácil
implementación vía software. A continuación, se presentan algunas de las propiedades de la dilatación:
Conmutativa: XBBX ⊕=⊕ (33) Asociativa: ( ) ( ) DBXDBX ⊕⊕=⊕⊕ (34)
Invariante a la traslación: ( )hh BXBX ⊕=⊕ (35)
Transformación creciente: BYBXYX Si ⊕⊆⊕⇒⊆ (36)
Figura 7.18. Operación de dilatación.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
33
7.5.4. Operaciones morfológicas II: La erosión.
La transformación morfológica de la erosión ⊗ combina dos conjuntos
utilizando la substracción de vectores. Es fácilmente intuir que esta operación es dual a la dilatación y que, además, ni la dilatación ni la erosión son invertibles. Por definición, la erosión es:
BbXbdEdBX ∈∀∈+∈=⊗rrrr
:2 (37)
Gráficamente, la erosión se realiza como sigue: Se va recorriendo la imagen, por ejemplo, de izquierda a derecha y de abajo arriba y, donde nos encontremos un 1, situamos el origen del elemento estructural sobre ese 1. En esa posición se realiza la comparación del elemento estructural con la parte de la imagen sobre la que se solapa dicho elemento. Si, todos los unos del elemento estructural coinciden con unos en la imagen, entonces marcamos el píxel de la imagen donde está el origen del elemento estructural con el valor 1.
Ejemplo 1:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2,3,2,2,3,1,2,0,1,3,0,3,1,2,0,2,2,1,1,0
1,0,0,0
1,3,0,3,1,2,0,2,2,1,1,0
=⊕==
BX
B
X
[ ]
•
=•⊗
•
00000
00001
00001
00000
00000
11
00000
00011
00011
00100
00010
Ejemplo 2:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 5,4,5,3,3,3,2,3,2,2,3,2,3,1,2,0,3,4,3,3,1,3,0,3,1,2,0,2,1,1,0,0
1,0,1,0
4,4,4,3,2,3,1,3,2,2,1,2,2,1,1,0
=⊕−=
=
BX
B
X
•
=
•⊕
•
00100
00000
00101
00000
00000
11
01
01100
00100
01111
00101
00100
La erosión provoca la desaparición de muchos contornos existentes en la imagen
original. La erosión con un elemento estructural isótropo es denominada por algunos autores como reducción. Esta operación es utilizada para simplificar la estructura de los objetos.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
34
La erosión tiene varias propiedades interesantes que permiten su fácil implementación vía software. A continuación, se presentan algunas de las propiedades de la dilatación:
No conmutativa: XBBX ⊕≠⊕ (38) Anti-extensiva: ( ) XBXB0,0 Si ⊆⊗⇒∈ (39)
Invariante a la traslación: ( )hh BXBX ⊗=⊗ (40)
Transformación creciente: BYBXYX Si ⊗⊆⊗⇒⊆ (41) Agresiva: DXBXBD Si ⊗⊆⊗⇒⊆ (42)
Conjunto simétrico: BbbB ∈−=rr(
; (43)
Transformaciones duales: ( ) YXYX CC(
⊕=⊗ (44)
Figura 7.19. Operación de erosión.
7.5.5. Operaciones morfológicas III: La apertura y el cierre.
La erosión y la dilatación son transformaciones no invertibles. Si una imagen es
erosionada y luego dilatada, la imagen original no se recupera. En efecto, obtendríamos una imagen más simplificada y menos detallada que la imagen original.
La erosión seguida de una dilatación crea una transformación morfológica
importante denominada apertura. La apertura de una imagen X por un elemento estructural B se denota por XB y se define como:
( ) BBXBX ⊕⊗=o (45)
La dilatación seguida de una erosión crea una transformación morfológica
importante denominada cierre. El cierre de una imagen X por un elemento estructural B se denota por X•B y se define como:
( ) BBXBX ⊗⊕=• (46)
Si una imagen X permanece invariable por apertura con respecto al elemento
estructural B, se dice que es abierta con respecto a B. De igual modo, si una imagen X permanece invariable por cierre con respecto al elemento estructural B se dice que es cerrada con respecto a B.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
35
La apertura y el cierre con un elemento isótropo se utilizan para eliminar detalles específicos de la imagen más pequeños que el elemento estructural. La forma global de los objetos no se distorsiona. El cierre conecta objetos que están próximos entre sí, rellena pequeños huecos y suaviza el contorno mientras que la apertura produce el efecto contrario.
(a) (b)
Figura 7.20. Operaciones: (a) Operación de apertura; (b) Operación de cierre. Algunas de las propiedades más interesantes de estas operaciones es, por
ejemplo, que ambas son invariantes respecto a la traslación, que la apertura es anti-extensiva y el cierre extensivo. Otro importante hecho es que la apertura y el cierre utilizadas iterativamente son idempotentes, lo que implica que la reaplicación de esas transformaciones no cambia el resultado previo. Formalmente, esto es,
( )( ) BBXBX
BBXBX
••=•= ooo
(47)
Además de otras aplicaciones de estas operaciones, existe una realmente
interesante para nuestro objetivo. La siguiente operación combinando apertura y erosión obtiene los bordes de las regiones,
BXBXBordes ⊗−= o (47)
(a) (b) (c)
Figura 7.21. Detección de bordes: (a) Apertura; (b) Erosión; (c) Resultado de restar.
−
=

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
36
7.5.6. Operaciones morfológicas en escala de grises.
Las operaciones antes estudiadas se pueden transferir al caso de una imagen en
escala de grises. Las operaciones se expresan de la siguiente manera: Dilatación:
( )( ) ( ) ( ) jibjyixfyxbf máxnjmi
,,,
1010
+−−=⊕
−≤≤−≤≤
(49)
El efecto general de realizar una dilatación en imágenes de gris también es
doble: (1) si todos los valores del elemento estructural son positivos, la imagen de salida tiende a ser más brillante que la de entrada; y (2) los detalles oscuros o bien son reducidos o eliminados dependiendo de sus valores.
Erosión:
( )( ) ( ) ( ) jibjyixfyxbf mínnjmi
,,,
1010
−++=⊕−≤≤−≤≤
(50)
El efecto general de realizar una dilatación en imágenes de gris también es
doble: (1) si todos los valores del elemento estructural son positivos, la imagen de salida tiende a ser más oscura que la de entrada; y (2) los detalles brillantes o bien son reducidos o eliminados dependiendo de sus valores.
Ejemplo:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2,3,2,2,3,1,2,0,1,3,0,3,1,2,0,2,2,1,1,0
1,0,0,0
1,3,0,3,1,2,0,2,2,1,1,0
=⊕==
BX
B
X
=
•⊕
22222222
27667622
27667622
27665422
22222222
21
21
00000000
00233100
00544500
00544300
00000000
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
=
•⊗
22222222
22222222
22201012
22222212
22222222
21
21
00000000
00233100
00544500
00544300
00000000

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
37
7.5.7. Algunas aplicaciones de la morfología en imágenes de grises.
Suavizado morfológico.
Una forma de conseguir un cierto suavizado consiste en realizar una apertura
morfológica de un cierre. El resultado de esas dos operaciones consiste en eliminar o atenuar tanto las zonas brillantes y oscuras como el ruido.
Gradiente morfológico.
La dilatación y la erosión se utilizan a menudo para obtener el gradiente
morfológico de una imagen denotado g y definido por:
( ) ( )BfBfg ⊗−⊕= (51)
Transformación sobrero en la parte superior o "top-hat".
Esta transformación viene dada por:
( )Bffh o−= (52) donde f es la imagen de entrada y B el elemento estructura. Esta transformación
debe su nombre al uso de un elemento estructural rectangular con una parte superior en forma de sombrero. Es útil para el realzado de detalles ante presencia de sombras.
•
=
0011100
0011100
0011100
0011100
0011100
1111111
1111111
B
(a) (b) (c)
Figura 7.22. Aplicaciones de morfología en grises: (a) Suavizado morfológico; (b) Gradiente morfológico; (c) Resultado de una transformación "top-hat".

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
38
7.6. Eliminación de ruido en el dominio espacial.
El ruido es una información no deseada que contamina la imagen el cual aparece
en las imágenes procedente de una gran variedad de fuentes. El proceso de adquisición de la imagen digital, que convierte la imagen óptica en una señal eléctrica continua que luego es muestreada, es el primer proceso por el cual el ruido aparece en imágenes digitales. Por tanto, podríamos definir la imagen como una componente pura g(x,y) junto con una componente de ruido ξ(x,y) tal y como se expresa a continuación:
( ) ( ) ( )yxyxgyxf ,,, ξ+= (53)
En cada paso del proceso hay fluctuaciones originadas por fenómenos naturales
que añaden un valor aleatorio al valor exacto de la intensidad para un determinado píxel.
Figura 7.23. Modelo del proceso de degradación de una imagen.
7.6.1. Tipos de ruido.
En las imágenes típicas de ruido puede modelarse bien como una distribución
gaussiana (normal), uniforme, "sal y pimienta" (impulsivo), Rayleigh, Exponencial negativo o Gamma.
a) Gaussiano.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
( )2
2
2
22
1 σ
πσ
mg
G eh
−−
= (54)
donde g es el nivel de gris del ruido, m el valor medio y σ la desviación estándar.
Figura 7.24. Distribución Gaussiana para m = 0: r σ = 2; a σ = 3; v σ = 4.
H
( )yxf ,
( )yx,ξ
( )yxg ,
+
+

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
39
b) Uniforme.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
≤≤−=
caso otro en
bga paraabhU
0
1 (55)
donde g es el nivel de gris del ruido, ( a + b )/2 el valor medio y ( b − a )
2/12 la
varianza.
Figura 7.25. Distribución Uniforme.
c) Impulsivo.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
==
=− )(
)(
pimientabg paraB
salag paraAh PS (56)
Figura 7.26. Distribución Impulsiva.
d) Rayleigh.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
α
α
2
2 g
R eg
h−
= (54)
donde g es el nivel de gris del ruido, 2/α el valor medio y α la desviación
estándar.
a b
A
B
a b
ab −1

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
40
Figura 7.27. Distribución Rayleigh para: a α = 2; a α = 4; v α = 8.
e) Exponencial negativo.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
α
α
g
NE eh−
− = 1 (54)
donde g es el nivel de gris del ruido, 1/α el valor medio y α la desviación
estándar.
Figura 7.28. Distribución Exponencial negativa para: a α = 2; a α = 4; v α = 8.
f) Gamma.
La forma de distribución de este tipo de ruido como nivel de gris se puede
modelar como un histograma h, cuya descripción analítica es la siguiente:
( )α
α
α
αα
g
NE eg
h−−
− −=
!1
1
(54)
donde g es el nivel de gris del ruido, α
2 el valor medio y α la desviación estándar.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
41
7.6.2. Filtros de orden.
a) Mediana.
Sustituimos el valor actual del píxel por la mediana. Esto se puede ver
claramente en el siguiente ejemplo:
6698,85,83,71,66,65,57,50,45
836657
718545
986550
⇒⇒⇒
MeM
El código implementado de este filtro es el siguiente:
function filtro_mediana( A ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; for n = –1 : 1 : 1
for m = –1 : 1 : 1 vector( 1 , k ) = A( i – n , j – m ); k = k + 1;
end end [ ordenado , indices ] = sort( vector ); C ( i , j ) = ordenado ( 1 , 5 );
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
42
b) Moda.
Sustituimos el valor actual del píxel por la moda. Esto se puede ver claramente
en el siguiente ejemplo:
6698,85,83,71,66,66,57,50,45
836657
718545
986650
⇒⇒⇒
MoM
El código implementado de este filtro es el siguiente:
function filtro_moda( A ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); moda = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; …………….. …………….. end
end end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
43
c) Mínimo.
Sustituimos el valor actual del píxel por el mínimo. Esto se puede ver
claramente en el siguiente ejemplo:
4598,85,83,71,66,65,57,50,45
836657
718545
986550
⇒⇒⇒
MínM
El código implementado de este filtro es el siguiente:
function filtro_minimo(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; for n = –1 : 1 : 1
for m = –1 : 1 : 1 vector( 1 , k ) = A( i – n , j – m ); k = k + 1;
end end C ( i , j ) = min( vector );
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
44
d) Máximo.
Sustituimos el valor actual del píxel por el máximo. Esto se puede ver
claramente en el siguiente ejemplo:
9898,85,83,71,66,65,57,50,45
836657
718545
986550
⇒⇒⇒
MáxM
El código implementado de este filtro es el siguiente:
function filtro_maximo(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; for n = –1 : 1 : 1
for m = –1 : 1 : 1 vector( 1 , k ) = A( i – n , j – m ); k = k + 1;
end end C ( i , j ) = max( vector );
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
45
e) Punto medio.
Sustituimos el valor actual del píxel por el punto medio entre el máximo y el
mínimo. Esto se puede ver claramente en el siguiente ejemplo:
722
984598,85,83,71,66,65,57,50,45
836657
718545
986550
≈+⇒⇒⇒
MeM
El código implementado de este filtro es el siguiente:
function filtro_maximo(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; for n = –1 : 1 : 1
for m = –1 : 1 : 1 vector( 1 , k ) = A( i – n , j – m ); k = k + 1;
end end C ( i , j ) = ( min( vector ) + max( vector ) ) / 2;
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
46
f) Alfa recortado.
El parámetro α nos indicará cuanto hemos de recortar los extremos. El caso
límite de este filtro es el filtro de la mediana. Esto se puede ver claramente en el siguiente ejemplo con α = 2:
9898,85,83,71,66,65,57,50,45
836657
718545
986550
⇒⇒⇒
αM
El código implementado de este filtro es el siguiente:
function filtro_maximo( A , alfa ) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); vector = zeros ( 1 , 9 ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
k = 0; for n = –1 : 1 : 1
for m = –1 : 1 : 1 vector( 1 , k ) = A( i – n , j – m );k = k + 1;
end end [ ordenado , indices ] = sort( vector ); C ( i , j ) = 0; for l = alfa : 1: 9 – alfa
C ( i , j ) = C ( i , j ) + ordenado ( 1 , l ); end C ( i , j ) = C ( i , j ) / ( 9 – 2*alfa );
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
47
(a) (b) (c)
(d) (e) (f)
(g)
Figura 7.29. Resultado de aplicar los filtros de orden.
(a) Imagen con ruido. (b) Imagen resultado de aplicar el filtro de la mediana. (c) Imagen resultado de aplicar el filtro de la moda. (d) Imagen resultado de aplicar el filtro del mínimo. (e) Imagen resultado de aplicar el filtro del máximo. (f) Imagen resultado de aplicar el filtro del punto medio. (g) Imagen resultado de aplicar el filtro α recortado.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
48
7.6.3. Filtros de media.
a) Media aritmética.
En este tipo de filtro se consigue aportar un valor al punto central de la máscara
igual al de la media aritmética de los puntos de la máscara. Las características que presenta este filtro son las siguientes:
• Difumina la imagen ya sea ante sal (valor de nivel de gris alto) o
pimienta (valor de nivel de gris alto). • Es un filtro apto para ruidos de tipo gaussiano y variantes. • Es capaz de eliminar bordes y hacer desaparecer detalles.
Formalmente, el filtrado supone realizar la suma de las nueve componentes que se tiene al superponer el filtro a la imagen, es decir,
∑=
=++++++++=⇒
9
1
987654321
987
654
321
9
1
9 i
iA zzzzzzzzzz
M
zzz
zzz
zzz
El código implementado de este filtro es el siguiente:
function filtro_media_aritmetica( A ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
C( i – 1 , j – 1 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ) ) / 9; end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
49
b) Media geométrica.
En este tipo de filtro se consigue aportar un valor al punto central de la máscara
igual al de la media geométrica de los puntos de la máscara. Las características que presenta este filtro son las siguientes:
• Difumina la imagen ya sea ante sal (valor de nivel de gris alto) o
pimienta (valor de nivel de gris alto). • Es un filtro apto para ruidos de tipo gaussiano y variantes. • Es capaz de detectar bordes y detalles que eliminaba la media aritmética.
Formalmente, el filtrado supone realizar el producto de las nueve componentes que se tiene al superponer el filtro a la imagen y hacer la raíz novena, es decir,
9
9
1
9987654321
987
654
321
········ ∏=
==⇒
i
iG zzzzzzzzzzM
zzz
zzz
zzz
El código implementado de este filtro es el siguiente:
function filtro_media_geometrica( A ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
C( i – 1 , j – 1 ) = ( prod( A( i – 1 : i + 1 , j – 1 : j + 1 ) ) )^(1 / 9); end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
50
c) Media armónica.
En este tipo de filtro se consigue aportar un valor al punto central de la máscara
igual al de la media armónica de los puntos de la máscara. Las características que presenta este filtro son las siguientes:
• Difumina la imagen ya sea ante sal (valor de nivel de gris alto) pero no
ante pimienta ya que no elimina este tipo de ruido. • Es un filtro apto para ruidos de tipo gaussiano y variantes.
Formalmente, el filtrado supone realizar las siguientes operaciones siguiendo la definición de media armónica, es decir,
∑=
=++++++++
=⇒
9
1987654321987
654
321
19
1111111119
i i
H
zzzzzzzzzz
M
zzz
zzz
zzz
El código implementado de este filtro es el siguiente:
function filtro_media_armonica( A ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
C( i – 1 , j – 1 ) = 9 / sum( 1 ./ A( i – 1 : i + 1 , j – 1 : j + 1 ) ); end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
51
d) Media contra-armónica.
En este tipo de filtro se consigue aportar un valor al punto central de la máscara
igual al de la media contra-armónica de los puntos de la máscara. Las características que presenta este filtro son las siguientes:
• Depende del valor de R que nosotros definimos. • R < 0, eliminamos ruido tipo sal. • R > 0, eliminamos ruido tipo pimienta.
Formalmente, el filtrado supone realizar la siguiente operación elemento a elemento, es decir,
∑
∑
=
=
++++++++++
− =++++++++
++++++++=⇒
9
1
9
1
1
987654321
19
18
17
16
15
14
13
12
11
987
654
321
i
R
i
i
R
i
RRRRRRRRR
RRRRRRRRR
HC
z
z
zzzzzzzzz
zzzzzzzzzM
zzz
zzz
zzz
El código implementado de este filtro es el siguiente:
function filtro_media_contrarmonica( A , R ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
C( i – 1 , j – 1 ) = ( sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).^(R + 1 ) ) / ( sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).^R );
end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
52
e) Media Yp.
En este tipo de filtro se consigue aportar un valor al punto central de la máscara
igual al de la media Yp de los puntos de la máscara. Las características que presenta este filtro son las siguientes:
• Depende del valor de P que nosotros definimos. • P < 0, eliminamos ruido tipo pimienta. • P > 0, eliminamos ruido tipo sal.
Formalmente, el filtrado supone realizar la siguiente operación elemento a elemento, es decir,
Pi
P
i
P
PPPPPPPPP
Y
zzzzzzzzzz
M
zzz
zzz
zzz
p 99
9
1987654321
987
654
321 ∑==++++++++=⇒
El código implementado de este filtro es el siguiente:
function filtro_media_yp( A , P ) [ f c ] = size( A ); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f , c ); for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
C( i – 1 , j – 1 ) = ( ( sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).^P ) / 9)^(1 / P); end end return

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
53
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
(j)
Figura 7.29. Resultado de aplicar los filtros de orden.
(a) Imagen con ruido sal y pimienta. (b) Imagen con ruido sal. (c) Imagen con ruido pimienta. (d) Imagen resultado de aplicar el filtro de la media aritmética. (e) Imagen resultado de aplicar el filtro de la media geométrica. (f) Imagen resultado de aplicar el filtro de la media armónica. (g) Imagen resultado de aplicar el filtro de la media contra-armónica. (h) Imagen resultado de aplicar el filtro de la media YP.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
54
7.7. Bibliografía.
Tratamiento Digital de Imágenes. Rafael C. González, Richard E. Woods.
Visión por Computador, Imágenes digitales y aplicaciones. Gonzalo Pajares, Jesús M. de la Cruz.

Tema 7 - Procesamiento Básico de Imágenes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
55

BLOQUE II: SISTEMAS DE VISIÓN ARTIFICIAL.
TEMA VIII: Transformadas de la imagen.
8.1. Transformada de Fourier 1
8.1.1. Transformada de Fourier continua 1
a) Unidimensional 1
b) Bidimensional 2
8.1.2. Transformada de Fourier discreta 4
c) Unidimensional 4
d) Bidimensional 4
8.1.3. Algunas propiedades de la Transformada de Fourier discreta 6
Propiedad I: Separabilidad 6
Propiedad II: Traslación 8
Propiedad III: Periodicidad y simetría conjugada 9
Propiedad IV: Rotación 10
Propiedad V: Distributividad y cambio de escala 11
Propiedad VI: Valor medio 12
Propiedad VI: Laplaciano 12
Propiedad VI: Convolución y Correlación 12
8.1.4. Transformada Rápida de Fourier 13
8.1.5. Representación del logaritmo del espectro de Fourier 13
8.2. Aplicaciones a la Transformada de Fourier 14
a) Analizador de texturas 14
b) Ruido 14
c) Detección de bordes 16
8.3. Transformada de Hough 17
8.4. Aplicaciones de la Transformada de Hough 20
8.5. Bibliografía 21

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
1
( )xf
xX
8.1. Transformada de Fourier.
8.1.1. Transformada de Fourier continua.
a) Transformada de Fourier unidimensional.
Sea f(x) una función continua de la variable real x, la Transformada Directa de
Fourier de f(x), indicada por ℑ f(x), se define por la siguiente ecuación:
( ) ( ) ( )∫+∞
∞−
−==ℑ dxexfuFxf uxj π2 (1)
Dada una F(u), podemos hallar f(x) empleando la Transformada Inversa de
Fourier, cuya expresión es la siguiente:
( ) ( ) ( )∫+∞
∞−
+− ==ℑ dxexfxfuF uxj π21 (2)
Las ecuaciones anteriores, denominadas par de Transformadas de Fourier,
existen siempre y cuando f(x) sea una función continua e integrable y F(u) sea
integrable (aspectos que se satisfacen casi siempre en la práctica). La variable u hace
referencia a la frecuencia.
Puesto que el integrando corresponde a una función compleja en el dominio del
espacio, como resultado de integrar, obtendremos también una función compleja en el
dominio de la frecuencia. Sin embargo, trabajaremos con el módulo de la transformada
puesto que será la característica que más información nos aporte sobre la imagen.
Ejemplo: Considerando la función f(x) representada a continuación, obtenga la
Transformada de Fourier de la misma:
( ) ≤≤
=caso otro en
XxAxf
0
0
Su Transformada de Fourier se obtiene de la ecuación anterior de la siguiente
forma:
( )
[ ] [ ]
( ) uXjuXjuXjuXj
uXjuXjuXjuj
X
uxj
Xuxj
X
uxjX
uxjuxjuxj
euXsenuj
Ae
ee
uj
A
e
uj
Ae
uj
Aee
uj
Ae
uj
A
dxeAdxeAdxeAdxeAdxeAuF
ππππ
πππππ
πππππ
πππ
ππππ
−−−+
−−−−−
−+∞ −−
∞−
−+∞
∞−
−
=−=
=−=−=−=
−=
==++== ∫∫∫∫∫
2
2
11
22·
2
·····
2
22202
0
2
0
22
0
20
22
( ) ( ) uXjeuXsenuj
AuF ππ
π−=

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
2
( )yxf ,
x X
yY
A
Puesto que a nosotros nos interesa representar el módulo de la Transformada de
Fourier, tenemos que el módulo es:
( ) ( ) ( ) ( ) ( )uX
uXsenAXeuXsen
uj
AuFeuXsen
uj
AuF uXjuXj
πππ
ππ
πππ ==⇒= −− ··
Representado gráficamente es:
b) Transformada de Fourier bidimensional.
Sea f(x,y) una función continua de dos variables reales x e y, la Transformada
Directa de Fourier de f(x,y), indicada por ℑ f(x,y), se define por la siguiente ecuación:
( ) ( ) ( ) ( )∫
+∞
∞−
+−==ℑ dxdyeyxfvuFyxf vyuxj π2,,, (3)
Dada una F(u), podemos hallar f(x) empleando la Transformada Inversa de
Fourier, cuya expresión es la siguiente:
( ) ( ) ( ) ( )∫
+∞
∞−
++− ==ℑ dudvevuFyxfvuF vyuxj π21 ,,, (4)
Las ecuaciones anteriores, denominadas par de Transformadas de Fourier,
existen siempre y cuando f(x,y) sea una función continua e integrable y F(u,v) sea
integrable (aspectos que se satisfacen casi siempre en la práctica). Las variables u y v
hacen referencia a la frecuencia, concepto que ahora es más complicado de ver.
Ejemplo: Considerando la función f(x,y) representada a continuación, obtenga la
Transformada de Fourier de la misma:
( ) ≤≤≤≤
=caso otro en
YyXxAyxf
0
0;0,
X
1
X
2
X
3
X
3−X
2−X
1−
AX

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
3
Su Transformada de Fourier se obtiene de la ecuación anterior de la siguiente
forma:
( ) ( ) ( ) ( )
( ) ( )
[ ][ ]
[ ][ ]
( ) ( ) ( ) ( )vY
evYsen
uX
euXsenAXYeuXsenevYsen
uv
A
j
eee
eee
uv
A
j
ee
uv
A
jee
uv
A
j
eeeeuv
A
je
uje
vjA
dxedyedxdyeAdxdyeA
dxdyeAdxdyeAdxdyeAvuF
vYjuXjuXjvYj
uXjuXjuXj
vYjvYjvYj
uXjvYjuXjvYj
uXjujvYjuj
X
uxj
Y
vyj
Xuxj
Yvyj
Y Xvyuxj
Y X
vyuxj
Y Xvyuxjvyuxjvyuxj
ππ
ππππ
π
π
ππ
πππ
ππππ
πππ
πππ
ππππ
ππππππ
ππππ
πππ
−−−−
−−+
−−+
−−−−
−−−−−−
−−+−∞+ ∞+ +−
+−
∞− ∞−
+−+∞
∞−
+∞
∞−
+−
=
−=
=−−
−=
=−−
−=−−
−=
=−−
−=
−
−=
=
==+
++==
∫∫∫ ∫∫ ∫
∫ ∫∫ ∫∫ ∫
2
22
222
22
2
202202
2
0
2
0
2
0
2
0
2
0 0
22
0 0
20 0
22
1
22
1
2
1
2
111·1
2
1
·2
1·
2
1··
2
1
···
···,
( ) ( ) ( )vY
evYsen
uX
euXsenAXYvuF
vYjuXj
ππ
ππ ππ −−
=,
Puesto que a nosotros nos interesa representar el módulo de la transformada de
Fourier, tenemos que el módulo es:
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )vY
vYsen
uX
uXsenAXYvuF
vY
evYsen
uX
euXsenAXYvuF
vY
evYsen
uX
euXsenAXYvuF
vYjuXjvYjuXj
ππ
ππ
ππ
ππ
ππ
ππ ππππ
··,
··,,
=
=⇒=−−−−
Representado gráficamente es:

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
4
8.1.2. Transformada de Fourier discreta.
a) Transformada Discreta de Fourier unidimensional.
Sea f(x) una función discreta de la variable real x, tal que x = 0, 1,..., N – 1 y f(x)
toma valores discretos representando el nivel de gris del píxel x. Entonces, la
Transformada Directa de Fourier Discreta de f(x), indicada por ℑ f(x), se define por
la siguiente ecuación:
( ) ( ) ( )∑−
=
−==ℑ
1
0
21 N
x
N
uxj
exfN
uFxfπ
(5)
Entonces, la Transformada Directa de Fourier discreta de la imagen consiste en
una función F(u) tal que u = 0, 1,..., N – 1.
Dada una F(u), podemos hallar f(x) empleando la Transformada Inversa de
Fourier Discreta, cuya expresión es la siguiente:
( ) ( ) ( )∑−
=
+− ==ℑ1
0
21
N
u
N
uxj
euFxfuFπ
(6)
Entonces, la Transformada Inversa de Fourier discreta de la imagen consiste en
una función f(x) tal que x = 0, 1,..., N – 1.
Las ecuaciones anteriores, denominadas par de Transformadas Discretas de
Fourier, existen siempre y cuando f(x) sea una función discreta y sumable y F(u) sea
sumable (aspectos que se satisfacen casi siempre en la práctica). La variable u hace
referencia a la frecuencia, esta vez, discretizada.
Los valores u = 0, 1,…, N – 1 de la Transformada de Fourier corresponden a las
muestras de la transformación continua en valores 0, ∆u, 2∆u,…, (N – 1)∆u. Es decir, la
función F(u) representa en realidad F(u∆u). Los términos ∆u y ∆x están relacionados
entre sí a través de la siguiente expresión:
xNu
∆=∆ 1
(7)
b) Transformada Discreta de Fourier bidimensional.
Sea f(x,y) una imagen en nivel de gris, con x = 0, 1,..., N – 1 e y = 0, 1,..., N – 1;
y f(x,y) toma valores discretos representando el nivel de gris del píxel (x,y). Entonces, la
Transformada Directa de Fourier Discreta de la imagen consiste en una función F(u,v)
tal que u = 0, 1,..., N – 1 y v = 0, 1,..., N – 1:
( ) ( ) ( )∑∑−
=
−
=
+−==ℑ
1
0
1
0
2
,1
,,M
x
N
y
N
vy
M
uxj
eyxfMN
vuFyxfπ
(8)

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
5
Para el caso cuando las imágenes se muestrean con una distribución cuadrada
(M = N), tenemos la siguiente expresión:
( ) ( ) ( )∑∑−
=
−
=
+−
==ℑ1
0
1
0
2
,1
,,N
x
N
y
N
vyuxj
eyxfN
vuFyxfπ
(9)
Dada una F(u,v), podemos hallar f(x,y) empleando la Transformada Inversa de
Fourier Discreta, cuya expresión es la siguiente:
( ) ( ) ( )∑∑−
=
−
=
++− ==ℑ
1
0
1
0
21 ,,,
M
u
N
v
N
vy
M
uxj
evuFyxfvuFπ
(10)
Para el caso cuando las imágenes se muestrean con una distribución cuadrada
(M = N), tenemos la siguiente expresión:
( ) ( ) ( )∑∑−
=
−
=
++− ==ℑ1
0
1
0
21 ,
1,,
N
u
N
v
N
vyuxj
evuFN
yxfvuFπ
(11)
Las ecuaciones anteriores, denominadas par de Transformadas de Fourier,
existen siempre y cuando f(x,y) sea una función discreta y sumable y F(u,v) sea sumable
(aspectos que se satisfacen casi siempre en la práctica). Las variables u y v hacen
referencia a la frecuencia.
Los incrementos de muestrea en los dominios espacial y de frecuencia están
relacionados por:
xMu
∆=∆ 1
yN
v∆
=∆ 1 (12)
Figura 8.1. Ejemplos de algunas de espectros Transformadas de Fourier.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
6
8.1.3. Algunas propiedades de la Transformada de Fourier discreta.
Propiedad I: Separabilidad.
Esta propiedad de la Transformada de Fourier (DFT, del inglés «Discrete
Fourier Transform») esta relacionada con la posibilidad de calcular la DFT de una
función bidimensional como una combinación de dos Transformadas de Fourier,
calculando primero una DFT sobre la variable de uno de los ejes y al resultado aplicarle
de nuevo la DFT sobre la variable del otro eje.
La ventaja que aporta esta propiedad es el hecho de poder obtener la
transformada F(u,v) o la inversa f(x,y) en dos pasos consecutivos, mediante la aplicación
de la Transformada de Fourier unidimensional o su inversa:
( ) ( )∑−
=
−=
1
0
2
,1
,N
x
M
uxj
evxFN
vuFπ
(13) ( ) ( )∑−
=
−=
1
0
2
,1
,N
y
M
vyj
eyuFN
vuFπ
(14)
donde F(x,v) es donde F(u,y) es
( ) ( )444 8444 76 filas susde una cada a TFD
N
y
N
vyj
eyxfN
NvxF
= ∑
−
=
−1
0
2
,1
·,π
( ) ( )444 8444 76 columnas susde una cada a TFD
N
x
N
uxj
eyxfN
NyuF
= ∑
−
=
−1
0
2
,1
·,π
TFD de filas-columnas TFD de columnas-filas
Por tanto, la transformada de la matriz f(x,y) se ha realizado, calculando primero
la transformada unidimensional a cada una de sus filas y multiplicando el resultado por
N. Posteriormente, se calcula la transformada a cada una de las columnas de la matriz
F(x,v). De igual modo, podemos obtener idénticos resultados tomando primero las
transformadas a lo largo de las columnas de f(x,y) y luego sobre las filas de ese
resultado.
Demostración.
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( );,,1
,1
,1
,1
,
:
;,,1
,1
,1
,1
,
:
1
0
1
0
2
1
0
21
0
21
0
21
0
21
0
2
1
0
1
0
2
1
0
21
0
21
0
21
0
21
0
2
∑∑
∑∑∑ ∑∑
∑∑
∑∑∑ ∑∑
−
=
−
=
+−
−
=
−−
=
−−
=
−−
=
−−
=
−
−
=
−
=
+−
−
=
−−
=
−−
=
−−
=
−−
=
−
==
==
==
−
==
==
==
−
N
x
N
y
N
vyuxj
N
y
M
uxjN
x
N
vyjN
y
M
vyjN
x
N
uxjN
y
M
vyj
N
x
N
y
N
vyuxj
N
x
M
uxjN
y
N
vyjN
x
M
uxjN
y
N
vyjN
x
M
uxj
vuFeyxfN
eeyxfN
eeyxfN
eyuFN
vuF
FILAS COLUMNAS
vuFeyxfN
eeyxfN
eeyxfN
evxFN
vuF
COLUMNAS FILAS
π
πππππ
π
πππππ
Transformada de cada una
de sus columnas
Transformada de cada una
de sus filas

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
7
(a)
(b)
Figura 8.2. Obtención de la Transformada de Fourier bidimensional como una serie de
transformadas unidimensionales; (a) FILAS-COLUMNAS; (b) COLUMNAS-FILAS.
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )yxf ,
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )yuF ,
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )vuF ,
DFT de las columnas y
Multiplicación por N. DFT de las filas.
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )yxf ,
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )vxF ,
( )0,0 ( )1,0 −N
( )0,1−N
y
x
( )vuF ,
DFT de las filas y
Multiplicación por N. DFT de las columnas.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
8
Propiedad II: Traslación.
Las propiedades de traslación del par de transformadas de Fourier son:
( ) ( )00
2
,,00
vvuuFeyxf N
yvxuj
−−⇔+
+ π y ( ) ( ) N
vyuxj
evuFyyxxf002
00 ,,
+−
⇔−−π
(15)
Por tanto, podemos decir que multiplicar por dicha exponencial en el dominio de
la imagen f(x,y) provoca un desplazamiento del centro de su transformada directa al
punto (u0,v0). Por otro lado, multiplicar por la segunda exponencial en el dominio de la
transformada F(u,v) tiene como resultado un traslado del centro de su transformada
inversa al punto (x0,y0).
Un caso particular de esta propiedad consiste en mover el origen de la
Transformada de Fourier de f(x,y) al centro de la matriz N × N que le corresponda, es
decir, al punto (N/2,
N/2). Para ello, podemos hacer uso de que:
( ) ( )
( ) ( ) ( ) ( )( )( ) ( )( )( )
( )( )( )
−−⇔−
−===⇒
−−⇔
+
++++
++
++
+
++
2,
21,
1,,,,,
,,
22
2222
00
2
00
00
Nv
NuFyxf
yxfeyxfeyxfeyxfeyxf
vvuuFeyxf
yx
yxyxj
yxj
N
yN
xN
jN
yvxuj
N
yvxuj
ππππ
π
Así, el origen de la Transformada de Fourier de f(x,y) puede ser desplazado hasta
el centro de su correspondiente cuadrado de frecuencias N × N multiplicando f(x,y) sólo
por (-1)x+y
(es decir, negando píxeles de la imagen f(x,y) alternativamente).
También cabe resaltar, que un desplazamiento en la función f(x,y), no provocará
un cambio en la magnitud de su transformada de Fourier. Véase esto matemáticamente
en la siguiente expresión:
( ) ( ) ( ) ( ) ( ) ( ) ( )vuFvuFevuFevuFevuF N
vyux
N
vyuxjN
vyuxj
N
vyuxj
,1·,·,·,,00000000
2222
=−===++
−+
−+
− πππ
(a) (b) (c)
Figura 8.3. Resultados de la traslación; (a) Imagen simple; (b) Espectro de Fourier sin
desplazamiento; (c) Espectro de Fourier desplazado hacia el centro.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
9
Propiedad III: Periodicidad y simetría conjugada.
Por tanto, gracias a esta propiedad de simetría, para calcular la magnitud de los
puntos de un periodo completo, tan sólo necesitamos calcular los N/2 + 1 primeros
puntos, siempre y cuando el origen de la transformada este centrado en el punto
(N/2,
N/2). Para conseguir este movimiento del origen en la transformada, podemos aplicar
la propiedad de traslación.
( ) ( ) ( ) ( )NvNuFNvuFvNuFvuF ++=+=+= ,,,, (16)
Si f(x,y) es real, una característica interesante es que la Transformada de Fourier
presenta también simetría conjugada y los módulos coinciden:
( ) ( )vuFvuF −−= ,, * y ( ) ( )vuFvuF −−= ,, (17)
Demostraciones:
( ) ( )( )
( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )( )
( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( ) ( )vuFeyxfN
eyxfN
eeyxfN
eeyxfN
eyxfN
eyxfN
NvNuF
vuFeyxfN
eyxfN
eeyxfN
eeyxfN
eyxfN
eyxfN
NvuF
vuFeyxfN
eyxfN
eeyxfN
eeyxfN
eyxfN
eyxfN
vNuF
N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
jN
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
N
yNvxNuj
N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
jN
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
N
yNvuxj
N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
jN
vyuxj
N
x
N
y
jN
vyuxjN
x
N
y
N
vyxNuj
,,1
1,1
,1
,1
,1
,1
,
,,1
1,1
,1
,1
,1
,1
,
,,1
1,1
,1
,1
,1
,1
,
1
0
1
0
21
0
1
0
42
1
0
1
0
421
0
1
0
42
1
0
1
0
421
0
1
0
2
1
0
1
0
21
0
1
0
22
1
0
1
0
221
0
1
0
22
1
0
1
0
221
0
1
0
2
1
0
1
0
21
0
1
0
22
1
0
1
0
221
0
1
0
22
1
0
1
0
221
0
1
0
2
==−=
===
===++•
==−=
===
===+•
==−=
===
===+•
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
∑∑∑∑
−
=
−
=
+−−
=
−
=
+−
−
=
−
=
−+
−−
=
−
=
−+
−
−
=
−
=
−+−−
=
−
=
+++−
−
=
−
=
+−−
=
−
=
+−
−
=
−
=
−+
−−
=
−
=
−+
−
−
=
−
=
−+−−
=
−
=
++−
−
=
−
=
+−−
=
−
=
+−
−
=
−
=
−+
−−
=
−
=
−+
−
−
=
−
=
−+−−
=
−
=
++−
ππ
ππππ
πππ
ππ
ππππ
πππ
ππ
ππππ
πππ
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )∑∑∑∑
∑∑∑∑
∑∑∑∑
−
=
−
=
−
=
−
=
−−−
−
=
−
=
−
=
−
=
+−
−
=
−
=
++−
=
−
=
−−−
==−−•
==•
===−−•
1
0
1
0
1
0
1
0
2
1
0
1
0
1
0
1
0
2
*1
0
1
0
21
0
1
0
2
,1
,1
,
,1
,1
,
,,1
,1
,
N
x
N
y
N
x
N
y
N
vyuxj
N
x
N
y
N
x
N
y
N
vyuxj
N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
yxfN
eyxfN
vuF
yxfN
eyxfN
vuF
vuFeyxfN
eyxfN
vuF
π
π
ππ

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
10
Propiedad IV: Rotación.
Si rotamos la función f(x,y) un ángulo determinado α, la Transformada de
Fourier también se verá afectada por una rotación del mismo ángulo α. Esta propiedad
también se da a la inversa, es decir, si la Transformada se rota en un determinado ángulo
β, la Transformada Inversa también se verá rotada ese mismo ángulo β.
Si introducimos las coordenadas polares:
( )θcosrx = ( )θsinrx =
( )φρ cos=u ( )φρ sin=v
Entonces f(x,y) y F(u,v) se convierten en f(r,θ) y F(ρ,φ ), respectivamente. La
sustitución directa en el par de transformadas de Fourier proporciona lo siguiente:
( ) ( )αφραθ +⇔+ ,, Frf (18)
(a) (b)
(c) (d)
Figura 8.4. Propiedades de rotación de la Transformada de Fourier; (a) Imagen simple;
(b) Espectro de la imagen simple; (c) Imagen girada; (d) Espectro de la imagen girada.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
11
Propiedad V: Distributividad y cambio de escala.
De la definición del par de Transformadas de Fourier continuas o discretas, se
tiene que ambas son distributivas respecto a la suma:
( ) ( ) ( ) ( ) yxfyxfyxfyxf ,,,, 2121 ℑ+ℑ=+ℑ (19)
Para dos escalares a y b, tenemos que:
( ) ( )vuaFyxaf ,, ⇔
y (20)
( )
⇔b
v
a
uF
abbyaxf ,
1,
Demostración:
( ) ( ) ( ) ( )[ ]
( ) ( )
( ) ( ) ( ) ( ) yxfyxfeyxfN
eyxfN
eyxfeyxfN
eyxfyxfN
yxfyxf
N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
N
x
N
y
N
vyuxj
N
vyuxj
N
x
N
y
N
vyuxj
,,,1
,1
,,1
,,1
,,
21
1
0
1
0
2
2
1
0
1
0
2
1
1
0
1
0
2
2
2
1
1
0
1
0
2
2121
ℑ+ℑ=+=
=
+=
=+=+ℑ
∑∑∑∑
∑∑
∑∑
−
=
−
=
+−−
=
−
=
+−
−
=
−
=
+−
+−
−
=
−
=
+−
ππ
ππ
π
( ) ( ) ( ) ( )∑∑∑∑−
=
−
=
+−−
=
−
=
+−=ℑ=ℑ
1
0
1
0
2
22
1
0
1
0
2
11 ,1
,,1
,N
x
N
y
N
vyuxjN
x
N
y
N
vyuxj
eyxfN
yxfeyxfN
yxfππ
(a) (b) (c)
(d) (e) (f)
Figura 8.5. Ejemplo gráfico de la propiedad de Distributividad: La suma de imágenes en
el espacio (a) + (b) = (c) se traslada también a la frecuencia (d) + (e) = (f).
+
=
+
=

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
12
Propiedad VI: Valor medio.
Una definición ampliamente utilizada del valor promedio de una función
discreta de dos dimensiones es:
( ) ( )∑∑−
=
−
=
=><1
0
1
02
,1
,N
x
N
y
yxfN
yxf (21)
Esta expresión se puede calcular a partir de la transformada de Fourier, sin más
que sustituir en la función F(u,v) para el punto (0,0). Por tanto, el valor promedio se
puede expresar matemáticamente en función de la transformada de Fourier, como sigue:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ><=⇒
=
= →=
∑∑
∑∑∑∑
−
=
−
=
−
=
−
=
==−
=
−
=
+−
yxfNFyxfN
NF
yxfN
FeyxfN
vuF
N
x
N
y
N
x
N
y
0vy 0u SiN
x
N
y
N
vyuxj
,0,0,1
0,0
,1
0,0,1
,
1
0
1
02
1
0
1
0
1
0
1
0
2π
Por consiguiente, el valor medio está relacionado con la transformada de Fourier
de f(x,y) por la siguiente expresión:
( ) ( )0,01
, FN
yxf >=< (22)
Propiedad VII: Laplaciano.
El laplaciano de una función de dos variables f(x,y) se define como:
( ) ( ) ( )yxfy
yxfx
yxf ,,,2
2
2
22
∂∂+
∂∂=∇ (23)
De la definición de la transformada de Fourier bidimensional, se tiene lo
siguiente:
( ) ( ) ( ) ( )vuFvuyxf ,2, 2222 +−⇔∇ℑ π (24)
El operador laplaciano es útil para delimitar los bordes de una imagen.
Propiedad VIII: Convolución y correlación.
La convolución de dos funciones f(x) y g(x), indicada por f(x)∗ g(x) se define
mediante la siguiente integral:
( ) ( ) ( ) ( ) ( ) ( )uGuFdxgfxgxf ⇔−=∗ ∫+∞
∞−ααα (25)
Donde α es una variable ficticia para la integración.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
13
La correlación de dos funciones continuas f(x) y g(x), representada por f(x)∗ g(x)
se define mediante la siguiente integral:
( ) ( ) ( ) ( ) ( ) ( )uGuFdxgfxgxf ∗+∞
∞−
∗ ⇔+= ∫ αααo (26)
donde α es una variable ficticia para la integración y * hace referencia al
conjugado complejo.
8.1.4. Transformada Rápida de Fourier.
El número de multiplicaciones complejas y sumas que se necesitan para
implementar la Transformada de Fourier es proporcional a N2. La descomposición
apropiada de la misma puede hacer que el número de multiplicaciones y sumas sea
proporcional a N log2(N). Dicho procedimiento de descomposición se denomina
Algoritmo de la Transformada Rápida de Fourier (FFT, del inglés «Fast Fourier
Transform»). Evidentemente, la aproximación de la FFT proporciona una apreciable
ventaja de cálculo sobre la resolución directa de la transformada de Fourier, en especial
cuando N es relativamente grande.
N Transformada
de Fourier directa
Transformada
Rápida de Fourier
Mejora
de cálculo
2 4 2 2,00
4 16 8 2,00
8 64 24 2,67
16 256 64 4,00
32 1.024 160 6,40
64 4.096 384 10,67
128 16.384 896 18,29
256 65.536 2.048 32,00
512 262.144 4.608 56,89
1.024 1.048.576 10.240 102,40
2.048 4.194.304 22.528 186,18
4.096 16.777.216 49.152 341,33
8.192 67.108.864 106.496 630,15
Tabla 8.1. Comparación entre N2 y N log2(N) para varios valores de N.
8.1.5. Representación del logaritmo del espectro de Fourier.
El espectro de Fourier suele tener un rango mucho mayor que los usuales para
mostrar una imagen. Una técnica usual para evitar esto es considerar el logaritmo del
espectro usando la siguiente fórmula:
( ) ( )( )vuFCvuD ,1log, += (27)
donde C es una constante adecuada de reescalado de la imagen, que se aplica
para obtener valores dentro de la paleta de colores disponible.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
14
8.2. Aplicaciones de la Transformada de Fourier.
a) Aplicación: Analizador de texturas.
Textura Bosque
Textura de territorio en barbecho
Textura campo
Textura de plantaciones
Textura de ciudad
Textura de agua
Figura 8.6. Demostración de las diferentes transformaciones de Fourier de cada textura.
b) Aplicación: Ruido.
Además de la utilización de la Transformada de Fourier para la diferenciación de
terrenos, es común su utilización para filtrar el ruido de una imagen. Si una señal
contiene ruido, al pasar al análisis de frecuencias mediante la Transformada de Fourier,
dicho ruido implicará una serie de valores altos correspondientes a frecuencias altas,
correspondiendo a "picos" en la Transformada de Fourier.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
15
Se desea, por tanto, anular el valor del ruido o, dicho de otra manera, eliminar
los picos que aparecen al operar con la transformada. Una convolución en el dominio
espacial corresponde a una multiplicación en el dominio de la frecuencia por lo que, así,
una alternativa es, en el dominio del espacio, convolucionar la señal con un filtro. No
obstante, también existe la posibilidad de trabajar en el dominio frecuencial puesto que
podremos eliminar el ruido anulando las regiones donde aparezcan los picos.
(a) (b) (c)
Figura 8.7. (a) Imagen con ruido; (b) Espectro de Fourier; (c) Picos de ruido.
En el dominio espacial podemos observar que existen básicamente dos tipos de
ruido, ambos aproximadamente diagonales. Por otro lado, en el dominio espectral de
Fourier, podemos identificar fácilmente este ruido como se muestra en la figura 8.7 b.
Como en este caso la operación es asimétrica en módulo, cada frecuencia de
ruido corresponde a dos picos. Podemos observar la aparición de cuatro pares de picos
dispuestos sobre el origen señalados en la figura 8.7 c.
Los dos pares de picos
solitarios (alejados del origen)
corresponden a ruidos pocos
perceptibles en el dominio del
espacio. Lo que se desea
hacer, por lo tanto, es la
ecualización de la señal en el
caso bidimensional discreto.
Cabe precisar que no es
interesante poner a cero el
pico central, pues este pico esto corresponde a la frecuencia nula, que efectivamente no
es ruido.
Muchas veces existe una frecuencia predominante en la imagen que parece
ruido, pero aparece por propia naturaleza de la imagen. La transformada de Fourier nos
permite identificar con exactitud cuales son los picos que debemos eliminar.
Multiplicando ambas transformadas podemos observar que el resultado de eliminar
determinadas regiones es parecido a la transformada de Fourier de la imagen original,
exceptuando las modificaciones antes dichas. Finalmente, aplicando la transformada
inversa obtenemos la imagen donde el ruido se ha reducido considerablemente
Figura 8.8 b.
Figura 8.8. (a) Eliminación de ruidos en frecuencias; (b) Imagen resultante.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
16
c) Aplicación: Detección de bordes.
La Transformada de Fourier es ampliamente utilizada para el proceso de
detección de bordes de una imagen puesto que ésta es una eficaz y rápida solución al
problema que presenta en muchos casos encontrar los distintos límites entre objetos.
(a) (b)
(c) (d)
Figura 8.9. Proceso de detección de bordes: (a) Imagen original; (b) Espectro de
Fourier; (c) Eliminación de frecuencias bajas; (d) Imagen resultante.
Eliminando las bajas frecuencias conseguiremos, mediante la Transformada
Inversa, los bordes de la imagen original. Sin embargo, si eliminamos las frecuencias
altas, habremos conseguido una imagen más nítida.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
17
8.3. Transformada de Hough.
En esta sección vamos a enlazar aquellos puntos de borde que caigan sobre una
determinada curva con determinada forma.
(a) (b)
Figura 8.10. (a) Plano xy; (b) Espacio parámetro.
Supongamos que para n puntos de la imagen, se desean encontrar aquellos
subconjuntos de puntos que caen en líneas rectas. Una posible solución podría ser, en
primer lugar, encontrar todas las líneas determinadas por cada par de puntos y entonces
encontrar todos los subconjuntos de puntos que están cerca de cada recta en particular.
Este problema así planteado requiere encontrar n(n − 1)/2 ~ n2 rectas y realizar
n(n(n − 1))/2 ~ n3 comparaciones de cada punto a cada línea. Este método será inviable
salvo en casos triviales.
Una alternativa a este método de búsqueda exhaustiva es la Transformada de
Hough. Consideramos un punto (xi,yi) y la ecuación de la recta, de la forma de la
pendiente y ordenada en el origen,
baxy ii += (28)
Por el punto (xi,yi) pasan infinitas rectas, pero todas satisfacen la ecuación
anterior para diferentes valores de a y b. Sin embargo, escribiendo esta ecuación en la
forma
ii yaxb +−= (29)
y considerando el plano ab (también denominado espacio parámetro) da lugar a
una única recta para el par (xi,yi) constante. Si ahora consideramos un segundo punto
(xj,yj), también va a tener su recta asociada en el espacio parámetro.
Estas dos rectas se cortarán en el espacio parámetro en un punto (a0,b0), donde
a0 es la pendiente y b0 la ordenada en el origen de la recta que contiene a los puntos
(xi,yi) y (xj,yj) en el plano xy, como se puede ver en la figura 8.10 b. De hecho, todos los
puntos de esa recta en el plano xy darán lugar a rectas diferentes en el espacio parámetro
que se cortan en un único punto (a0,b0).
x
y
( )ii yx ,
( )jj yx ,
a
b
ii yaxb +−=jj yaxb +−=
0a
0b

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
18
El atractivo de la Transformada de Hough proviene de subdividir el espacio
parámetro en celdas acumuladoras, como se puede ver en la figura 8.11, donde
(amín,amáx) y (bmín,bmáx) son los rangos esperados para la pendiente y la ordenada en el
origen. La celda de coordenadas (i,j), con un valor de acumulador A(i,j) corresponde al
cuadrado asociado con las coordenadas (ai,bj) del espacio parámetro. Inicialmente se
ponen todos los acumuladores a cero. Entonces para cada punto (xk,yk) de la imagen,
permitimos que el parámetro a pueda tomar cualquier valor de entre los ai permitidos y
calculamos b usando la ecuación (29). Los valores resultantes para el parámetro b se
redondean hasta los bj permitidos. Si para un valor ap resultó un valor bq se tiene que
( ) ( ) 1,, += qpAqpA (30)
Figura 8.11. Celdas acumuladoras en el espacio parámetro.
Al final, un valor de M en el acumulador A(i,j) significa que M puntos del plano
xy caen sobre la recta y = aix + bj. La precisión en la colinealidad de estos puntos
depende del número de celdas del espacio parámetro.
Si subdividimos el eje a en K celdas, para cada punto (xk,yk), obtenemos K
valores de b correspondientes a los K posibles valores de a. Si la imagen tiene n puntos,
la carga computacional es del orden de n·K. La transformada de Hough es lineal en n, y
el producto n·K es mucho menor que si hubiéramos empleado una búsqueda exhaustiva,
a menos que K sea del orden o exceda a n.
Un problema que surge al emplear la ecuación de la recta y = ax + b para
representar una línea es que tanto la pendiente como la ordenada en el origen pueden
llegar a valer infinito, según la línea se hace vertical. Una forma de solventar este
problema consiste en utilizar la representación en coordenadas polares de la recta:
( ) ( ) ρθθ =+ sincos yx (31)
En la figura 8.12 a se puede ver el significado de los nuevos parámetros (ρ,θ). El
uso de esta representación para construir la tabla de acumuladores es similar al método
explicado para las rectas en la forma pendiente y ordenada en el origen. A cada punto
del plano xy corresponde ahora una sinusoide en el plano ρθ en lugar de una recta. Al
igual que antes, M puntos colineales a la recta xcos (θj) + ysin (θj) = ρi darán lugar a M
sinusoides que se cortan en el punto (ρj,θi) en el espacio de parámetros. Incrementando θ
y calculando ρ, obtendremos M entradas en el acumulador A(i,j) correspondiente al par
(ρj,θi).
a
b
máxamína
mínb
máxb

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
19
(a) (b)
Figura 8.12. (a) Representación normal de una recta; (b) Celdas acumuladoras en el espacio θ.
En la figura 8.12 b podemos ver la tabla de acumuladores del espacio de
parámetros en este caso. El rango para el ángulo θ es ±90º, medido con respecto al eje
de abscisas. Se permiten valores negativos de ρ para rectas por detrás del origen de
coordenadas del plano xy. Por ejemplo, una recta horizontal corresponde a un valor de θ
= 0º y un valor de ρ igual a la ordenada en el origen, mientras que una recta vertical
corresponde a un valor de θ = 90º y un valor de ρ igual a la abscisa en el origen.
Aunque hemos hecho un análisis para el caso de rectas, la transformada de
Hough también es aplicable a cualquier función de la forma
( ) 0, =cvg (32)
donde v es un vector de coordenadas y c es un vector de coeficientes. Por
ejemplo, puntos que caen en el círculo
( ) ( ) 2
3
2
2
2
1 ccycx =++− (33)
se pueden detectar empleando también la transformada de Hough. En este caso
tenemos tres parámetros (c1,c2,c3), lo que dará lugar a un espacio de parámetros de tres
dimensiones, con celdas con forma de cubo y acumuladores de la forma A(i,j,k). El
procedimiento en este caso es para cada punto del plano xy, para cada c1 y para cada c2
calcular el valor de c3 y actualizar el acumulador correspondiente a (c1,c2,c3).
Claramente la complejidad de la Transformada de Hough es claramente dependiente del
tamaño del espacio de parámetros.
En el caso de que el objeto tenga una forma irregular hemos de seguir los
siguientes pasos:
1. Construir la tabla-R del objeto.
2. Discretizar xref , yref y φ.
3. Generar acumulador A(xref , yref , φ).
4. Para todo los punto del borde (xi , yj).
a) calcular Ω.
b) para cada φ.
5. Para cada par (r, β) indexar ω − φ en R.
a' evaluar xref = xi + r cos(β + φ) y yref = yi + r sin(β + φ)
b' incrementar A(xref , yref , φ)..
x
y
ρθ mínρ
máxρ
θ
ρ
mínθ máxθ

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
20
8.4. Aplicaciones a la Transformada de Hough.
Roque no he encontrado nada sobre esto se que se utiliza para bordes y demás
pero no he encontrado nada de teoría.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
21
8.5. Bibliografía.
Tratamiento Digital de Imágenes. Rafael C. González, Richard E. Woods.
Visión por Computador. Gonzalo Pajares, Jesús M. de la Cruz.

Tema 8 – Transformadas de la imagen BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
22
Visión por Computador. Javier González Jiménez.

BLOQUE II: SISTEMAS DE VISIÓN ARTIFICIAL.
TEMA IX: Detección de bordes.
9.1. Introducción 1
9.1.1. Conceptos básicos sobre la detección de bordes 1
9.1.2. La operación Convolución 3
9.2. Operadores basados en máscaras direccionales 6
9.2.1. Operadores de Kirsch 6
9.2.2. Operadores de Robinson 10
9.3. Operadores basados en la primera derivada: Gradiente 14
9.3.1. Operadores basados en la definición de gradiente 15
9.3.2. Operadores de Prewitt 19
9.3.3. Operadores de Sobel 24
9.4. Operadores basados en la segunda derivada: Laplaciano 28
9.5. Operador de Canny 30
9.6. Problemas en los operadores para la detección de bordes 32
9.7. Bibliografía 33

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
1
9.1. Introducción.
9.1.1. Conceptos básicos sobre detección de bordes.
En el tema de Tratamiento Digital de Imágenes, dada una imagen, lo que
deseábamos obtener era la propia imagen, una aproximación, o una versión mejorada de la imagen original empleando para ello operaciones aritméticas, lógicas o morfológicas. Otra parte del Procesamiento Digital de Imágenes se encarga del análisis de las mismas. Ahora, dada una imagen, lo que deseamos obtener es una descripción de dicha imagen. Los siguientes casos son ejemplos de problemas de análisis de imágenes:
• Dado un texto, reconocer las palabras. • Dada una imagen aérea de un terreno, clasificar los distintos tipos de suelos
(urbano, bosque, lagos, carreteras,...). • Para aplicaciones relacionadas con Sistemas de Control de Calidad o de
Producción,... • Dada una imagen médica, detectar tumores, roturas de huesos,...
En todos estos ejemplos, el análisis va orientado a detectar determinadas partes de la imagen (regiones u objetos). Para generar tal descripción es necesario detectar adecuadamente e identificar la región deseada. En este tema, centraremos nuestra atención en la detección de fronteras o bordes.
Una de las informaciones más útiles que se encuentran en una imagen la constituyen los bordes ya que al delimitar los objetos, definen los límites entre cada ente de la imagen. La información adquirida durante el proceso de detección de bordes la emplearemos posteriormente durante el proceso de segmentación.
Figura 9.1. Distribución unidimensional de niveles de gris de la sección de un anillo.
SECCIÓN A-A
En el perfil se observa que existen dos fronteras teóricas pues existe una transición del negro a blanco y del blanco al negro.
A
A
Niveles de gris

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
2
Si observamos en la figura anterior, nos podemos fijar que el borde no aparece como una variación del nivel de gris de 0 a 255 de una forma instantánea sino que se representa con forma de variación gradual dando lugar a un pico o punto máximo que representaría el lugar geométrico del borde ideal (un borde ideal sería una línea unidimensional, es decir, sin "espesor").
Las técnicas de detección de bordes tienen por objeto la localización de los
puntos donde se produce variación de intensidad, pudiendo emplearse para ello métodos basados en "operadores derivada". Estás técnicas son de gran importancia puesto que, siendo capaces de precisar la posición de un borde, lograremos delimitar objetos.
Figura 9.2. Modelo unidimensional y continuo de un borde ideal.
Tal y como podemos intuir en la gráfica anterior, existe un estrecho vínculo
entre la nitidez de un borde y el ángulo α. Para variaciones de intensidad con pendientes próximas a 90º la nitidez será elevada (una mejor localización del borde) mientras que para pendientes pequeñas el borde aparecerá difuminado y con poca definición.
En las imágenes reales los bordes nunca se ajustan totalmente al modelo anterior. Las causas de ello son diversas, pudiendo destacar las siguientes:
• El muestreo de una imagen implica que la imagen resultante sea discreta.
• Las imágenes tratadas generalmente están afectadas por ruidos diversos.
• El origen de los bordes puede ser diferente: borde de oclusión, superficie de diferente orientación, distinta textura, defectos de la iluminación,…
Las circunstancias anteriores introducen una gran complejidad a la hora de
detectar los bordes de una imagen. En particular, en este proceso se consideran tres tipos de errores:
Figura 9.3. Defectos en la detección y localización de un borde. (a) Borde real; (b)
Detección pobre; (c) Localización pobre; (d) Múltiple respuesta.
α
B
A
0
A Nivel de gris bajo B Nivel de gris alto P Punto medio de la rampa α Ángulo de inclinación
H Variación de la intensidad, H = B - A
P
(a) (b) (c) (d)

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
3
A continuación, describiremos cada uno de los errores que se pueden presentar en una imagen:
• Error en la detección: Un operador es un buen detector de bordes si la
probabilidad de detectar el borde es alta cuando éste realmente existe en la imagen, y baja cuando no existe (Figura 9.3. b).
• Error en la localización: Un operador sitúa bien un borde cuando la posición del borde detectado coincide con la posición real del borde en la imagen (Figura 9.3. c).
• Respuesta múltiple: Varios píxeles son detectados como un único borde provocando un ensanchamiento y una disminución de la precisión (Figura 9.3. d).
En general, no hay forma de conocer si los píxeles detectados como parte del
borde son correctos o no (intuitivamente hablando). Sin embargo, en algunos casos, podemos conocer si un detector de bordes se ha equivocado al detectar un píxel como parte del borde. Es lo que se llama falso positivo (el detector devuelve un píxel cuando en realidad no pertenecía a ningún borde) y falso negativo (el detector no devuelve un píxel cuando en realidad pertenecía a un borde).
Una manera posible de evaluar si un detector de bordes es eficiente o no, viene dada por la siguiente función, conocida como Función de Pratt:
( )∑= +=
DP
i iID dPPmáxR
12·1
1
,
1
β (1)
donde:
• PD es la cantidad de píxeles que devuelve el detector de bordes. • PI es la cantidad de píxeles reales que pertenecen a un borde en la imagen. • di es la distancia horizontal entre el píxel i-ésimo del detector y el píxel más
próximo del verdadero borde de la imagen. • β es una constante que se usa para reescalado. Lo normal es β = 1/9.
Figura 9.4. Criterio de medición del parámetro β.
El problema que presenta este evaluador es que se han de conocer los píxeles
que realmente pertenecen a un borde. Existen otras aproximaciones que se basan en la "coherencia local". En este
caso, no se compara con el borde real de la imagen sino que, por el contrario, compara cada píxel detectado con sus vecinos.
(a) (b)
unidadesd i 2=unidaddi 1=

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
4
9.1.2. La operación Convolución.
Una convolución bidimensional se puede expresar de la siguiente forma:
( ) ( ) ( ) ( )∑∑
∈ ∈
−−=⊗mi mj
jimjyixfjimyxf ,·,,, (2)
donde f(x,y) es el valor del píxel de la imagen y m es una subimagen llamada
máscara. Si suponemos lo siguiente:
• La imagen tiene dimensiones N × M. • El dominio de la imagen es [1,N] × [1,M]. • La máscara tiene dimensiones 3 × 3 con el origen en el centro.
entonces la nueva imagen tiene dimensiones (N + 2) × (M + 2) cuyo dominio es [0,N+1] × [0,M+1].
Por ejemplo, consideremos las siguientes matrices:
( )
=
11100
11100
11100
00000
00011
, yxf ( )
−−−=
121
000
121
, jim
Entonces ( ) ( )jimyxf ,, ⊗ es una nueva matriz g(x,y):
( )
−−−−−−−−−−
−−−=
1333100
1333100
0000000
1333100
1322231
0000000
0011331
, yxg
donde, por ejemplo,
11134012411141033
0023101311320122111223
) = ,-)m(-,) + f(,)m(-,) + f(,)m(-,) + f(,-)m(, + f(
) +,)m(,) + f(,)m(,) + f(,-)m(,) + f(,)m(,) + f(,)m(,) = f(,g(

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
5
A continuación enunciaremos los pasos a seguir para ejecutar una operación de convolución: 1º Ensanchar dos filas y dos columnas la matriz original, es decir,
( )
=
11100
11100
11100
00000
00011
, yxf ( )
=
0000000
0111000
0111000
0111000
0000000
0000110
0000000
,~
yxf
2º Invertir la máscara, es decir, volcamos la máscara de izquierda a derecha y después de abajo a arriba (por ejemplo):
( ) ( )jim
abc
def
ghi
ghi
def
abc
ihg
fed
cba
jim ,~, =
→
→
=
Y para el ejemplo anterior, tenemos que
( ) ( )jimjim ,~
121
000
121
121
000
121
121
000
121
, =
−−−→
−−−→
−−−=
3º Recorremos toda la matriz empleando la máscara ya invertida y, en cada elemento, realizamos un producto (elemento a elemento) de la máscara con esa zona de la matriz:
3
0000000
0111000
0111000
0111000
0000000
0000110
0000000
El resultado de aplicar la máscara lo almacenamos en la imagen resultado, es
decir, la convolución no modifica la imagen original si no que el efecto de aplicar la máscara de elemento en elemento, lo almacenamos en una nueva matriz que representará el resultado de la convolución. Nota:
−−−
121
000
121

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
6
Cuando ese esté recorriendo la matriz con la máscara moveremos la máscara en base a su centro sin salirnos del dominio de la imagen original, esto es, sin que el centro de la máscara salga de las "líneas discontinuas".

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
7
9.2. Operadores basados en máscaras direccionales.
Puesto que un borde ideal es esencialmente un patrón con forma de escalón, un
método eficaz de detectar los bordes consiste en correlacionar la imagen con patrones en todas las orientaciones posibles. 9.2.1. Operadores de Kirsch.
Los operadores de Kirsch se denominan también de brújula porque se definen
considerando una máscara simple y rotándola en las ocho direcciones principales de la brújula: Norte, Noroeste, Oeste, Suroeste, Sur, Este y Noreste. Los operadores se definen como:
º315º270º225º180
;
553
503
333
;
555
303
333
;
355
305
333
;
335
305
335
º135º90º45º0
;
333
305
355
;
333
303
555
;
333
503
553
;
533
503
533
7654
3210
−−
−−−=
−−−−−
=
−−−−−
=
−−−−−
=
−−−−−
=
−−−−−=
−−−−−
=
−−−
−−=
KKKK
KKKK
(3)
Por ejemplo, un valor grande después de aplicar la primera máscara sobre un
píxel implica que existe un borde en sentido vertical (por tanto, un gradiente horizontal) en el píxel donde se ha aplicado la máscara. Para encontrar los bordes, se aplica cada una de las máscaras en cada uno de los píxeles (se realiza una convolución con cada máscara). La respuesta del detector de bordes es el máximo de las respuestas de cada una de las ocho máscaras y la dirección sería pi/4 si Ki ha sido la máscara responsable de dicho máximo. En la siguiente figura podemos observar el resultado de aplicar operadores Kirsch a una imagen pudiendo apreciar que el resultado de los bordes es bastante impreciso por estar esto muy difuminados (respuesta múltiple).
(a) (b)
Figura 9.5. (a) Imagen original; (b) Imagen obtenida al aplicar los operadores de Kirsch.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
8
Código implementado utilizando MatLAB:
function kirsch(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); B = zeros( 1 , 8 ); k0 = [ 5 , –3 , –3 ; 5 , 0 , –3 ; 5 , –3 , –3 ]; k1 = [ –3 , –3 , –3 ; 5 , 0 , –3 ; 5 , 5 , –3 ]; k2 = [ –3 , –3 , –3 ; –3 , 0 , –3 ; 5 , 5 , 5 ]; k3 = [ –3 , –3 , –3 ; –3 , 0 , 5 ; 5 , 5 , –3 ]; k4 = [ –3 , –3 , 5 ; –3 , 0 , 5 ; –3 , –3 , 5 ]; k5 = [ 5 , 5 , –3 ; 5 , 0 , –3 ; –3 , –3 , –3 ]; k7 = [ 5 , 5 , 5 ; –3 , 0 , –3 ; –3 , –3 , –3 ]; k8 = [ 5 , 5 , –3 ; 5 , 0 , –3 ; –3 , –3 , –3 ]; valor = 0; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
B( 1 , 1 ) = A( i – 1 , j – 1 )*k0( 1 , 1 ) + A( i – 1, j )*k0( 1 , 2 ) + A( i – 1, j + 1 )*k0( 1 , 3 ) + + A( i , j – 1 )*k0( 2 , 1 ) + A( i , j )*k0( 2 , 2 ) + A( i , j + 1 )*k0( 2 , 3 ) + A( i + 1 , j – 1 )*k0( 3 , 1 ) + A( i + 1 , j )*k0( 3 , 2 ) + A( i + 1 , j + 1 )*k0( 3 , 3 ); B( 1 , 2 ) = A( i – 1 , j – 1 )*k1( 1 , 1 ) + A( i – 1, j )*k1( 1 , 2 ) + A( i – 1, j + 1 )*k1( 1 , 3 ) +
+ A( i , j – 1 )*k1( 2 , 1 ) + A( i , j )*k1( 2 , 2 ) + A( i , j + 1 )*k1( 2 , 3 ) + A( i + 1 , j – 1 )*k1( 3 , 1 ) + A( i + 1 , j )*k1( 3 , 2 ) + A( i + 1 , j + 1 )*k1( 3 , 3 ); B( 1 , 3 ) = A( i – 1 , j – 1 )*k2( 1 , 1 ) + A( i – 1, j )*k2( 1 , 2 ) + A( i – 1, j + 1 )*k2( 1 , 3 ) +
+ A( i , j – 1 )*k2( 2 , 1 ) + A( i , j )*k24( 2 , 2 ) + A( i , j + 1 )*k2( 2 , 3 ) + A( i + 1 , j – 1 )*k2( 3 , 1 ) + A( i + 1 , j )*83,2) + A( i + 1 , j + 1 )*k2( 3 , 3 ); B(1,4) = A( i – 1 , j – 1 )*k3( 1 , 1 ) + A( i – 1, j )*k3( 1 , 2 ) + A( i – 1, j + 1 )*k3( 1 , 3 ) +
+ A( i , j – 1 )*k3( 2 , 1 ) + A( i , j )*k3( 2 , 2 ) + A( i , j + 1 )*k3( 2 , 3 ) + A( i + 1 , j – 1 )*k3( 3 , 1 ) + A( i + 1 , j )*k3( 3 , 2 ) + A( i + 1 , j + 1 )*k3( 3 , 3 ); B(1,5) = A( i – 1 , j – 1 )*k4( 1 , 1 ) + A( i – 1, j )*k4( 1 , 2 ) + A( i – 1, j + 1 )*k4( 1 , 3 ) +
+ A( i , j – 1 )*k4( 2 , 1 ) + A( i , j )*k4( 2 , 2 ) + A( i , j + 1 )*k4( 2 , 3 ) + A( i + 1 , j – 1 )*k4( 3 , 1 ) + A( i + 1 , j )*k4( 3 , 2 ) + A( i + 1 , j + 1 )*k4( 3 , 3 ); B(1,6) = A( i – 1 , j – 1 )*k5( 1 , 1 ) + A( i – 1, j )*k5( 1 , 2 ) + A( i – 1, j + 1 )*k5( 1 , 3 ) +
+ A( i , j – 1 )*k5( 2 , 1 ) + A( i , j )*k5( 2 , 2 ) + A( i , j + 1 )*k5( 2 , 3 ) + A( i + 1 , j – 1 )*k5( 3 , 1 ) + A( i + 1 , j )*k5( 3 , 2 ) + A( i + 1 , j + 1 )*k5( 3 , 3 ); B(1,7) = A( i – 1 , j – 1 )*k6( 1 , 1 ) + A( i – 1, j )*k6( 1 , 2 ) + A( i – 1, j + 1 )*k6( 1 , 3 ) +
+ A( i , j – 1 )*k6( 2 , 1 ) + A( i , j )*k6( 2 , 2 ) + A( i , j + 1 )*k6( 2 , 3 ) + A( i + 1 , j – 1 )*k6( 3 , 1 ) + A( i + 1 , j )*k6( 3 , 2 ) + A( i + 1 , j + 1 )*k6( 3 , 3 ); B(1,8) = A( i – 1 , j – 1 )*k7( 1 , 1 ) + A( i – 1, j )*k7( 1 , 2 ) + A( i – 1, j + 1 )*k7( 1 , 3 ) +
+ A( i , j – 1 )*k7( 2 , 1 ) + A( i , j )*k7( 2 , 2 ) + A( i , j + 1 )*k7( 2 , 3 ) + A( i + 1 , j – 1 )*k7( 3 , 1 ) + A( i + 1 , j )*k7( 3 , 2 ) + A( i + 1 , j + 1 )*k7( 3 , 3 ); for m = 1 : 1 : 8 for n = 1 : 1 : 8 if B( 1 , m ) >= valor valor = B( 1 , m ); end end end C( i , j ) = valor;
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
9
Otra manera más eficaz de código implementado utilizando MatLAB:
function kirsch(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); B = zeros( 1 , 8 ); k=zeros(1,8,3,3); k( 1 , 1 ) = [ 5 , –3 , –3 ; 5 , 0 , –3 ; 5 , –3 , –3 ]; k( 1 , 2 ) = [ –3 , –3 , –3 ; 5 , 0 , –3 ; 5 , 5 , –3 ]; k( 1 , 3 ) = [ –3 , –3 , –3 ; –3 , 0 , –3 ; 5 , 5 , 5 ]; k( 1 , 4 ) = [ –3 , –3 , –3 ; –3 , 0 , 5 ; 5 , 5 , –3 ]; k( 1 , 5 ) = [ –3 , –3 , 5 ; –3 , 0 , 5 ; –3 , –3 , 5 ]; k( 1 , 6 ) = [ 5 , 5 , –3 ; 5 , 0 , –3 ; –3 , –3 , –3 ]; k( 1 , 7 ) = [ 5 , 5 , 5 ; –3 , 0 , –3 ; –3 , –3 , –3 ]; k( 1 , 8 ) = [ 5 , 5 , –3 ; 5 , 0 , –3 ; –3 , –3 , –3 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
for p = 1 : 1 : 8 B( 1 , p ) = sum(A( i – 1 : i + 1 , j – 1 : j + 1 )*.k( 1 , p )); end for m = 1 : 1 : 8 for n = 1 : 1 : 8
if B( 1 , m ) >= B( 1 , n ) valor = B( 1 , m );
end end end C( i , j ) = valor; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
10
(a)
(b) (c)
(d) (e)
(f) (g)
(h) (i)
Figura 9.6. (a) Imagen real; (b) Norte; (c) Noroeste; (d) Oeste; (e) Suroeste; (f) Sur; (g) Sureste; (h) Este; (i) Noreste.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
11
9.2.2. Operadores de Robinson.
Los operadores de Robinson se definen considerando una máscara simple y
rotándola en las ocho direcciones principales de la brújula: Norte, Noroeste, Oeste, Suroeste, Sur, Este y Noreste. Los operadores se definen como:
º315º270º225º180
;
210
101
012
;
121
000
121
;
012
101
210
;
101
202
101
º135º90º45º0
;
210
101
012
;
121
000
121
;
012
101
210
;
101
202
101
7654
3210
−−−
=
−−−=
−−−
=
−−−
=
−−−=
−−−=
−−−=
−−−
=
RRRR
RRRR
(4)
Para encontrar los bordes, se aplica cada una de las máscaras en cada uno de los píxeles. La respuesta del detector de bordes es el máximo de las respuestas de cada una de las ocho máscaras y la dirección sería pi/4 si Ki ha sido la máscara responsable de dicho máximo. Como se puede observar obtenemos resultados no satisfactorios.
(a) (b)
Figura 9.7. (a) Imagen original; (b) Resultado de aplicar los operadores de Robinson. El resultado de aplicar tanto los Operadores de Kirsch como los de Robinson nos
aportan resultados similares aunque con una localización de bordes más precisa.
(a) (b)
Figura 9.8. Kirsch VS Robinson: (a) Resultado de Kirsch; (b) Resultado de Robinson.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
12
Código implementado utilizando MatLAB:
function robinson(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); B = zeros( 1 , 8 ); r0 = [ 1 , 0 , –1 ; 2 , 0 , –2 ; 1 , 0 , –1 ]; r1 = [ 0 , –1 , –2 ; 1 , 0 , –1 ; 2 , 1 , 0 ]; r2 = [ –1 , –2 , –1 ; 0 , 0 , 0 ; 1 , 2 , 1 ]; r3 = [ –2 , –1 , 0 ; –1 , 0 , 1 ; 0 , 1 , 2 ]; r4 = [ –1 , 0 , 1 ; –2 , 0 , 2 ; –1 , 0 , 1 ]; r5 = [ 0 , 1 , 2 ; –1 , 0 , 1 ; –2 , –1 , 0 ]; r7 = [ 1 , 2 , 1 ; 0 , 0 , 0 ; –1 , –2 , –1 ]; r8 = [ 2 , 1 , 0 ; 1 , 0 , –1 ; 0 , –1 , –2 ]; valor = 0; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
B( 1 , 1 ) = A( i – 1 , j – 1 )*r0( 1 , 1 ) + A( i – 1, j )*r0( 1 , 2 ) + A( i – 1, j + 1 )*r0( 1 , 3 ) + + A( i , j – 1 )*r0( 2 , 1 ) + A( i , j )*r0( 2 , 2 ) + A( i , j + 1 )*r0( 2 , 3 ) + A( i + 1 , j – 1 )*r0( 3 , 1 ) + A( i + 1 , j )*r0( 3 , 2 ) + A( i + 1 , j + 1 )*r0( 3 , 3 ); B( 1 , 2 ) = A( i – 1 , j – 1 )*r1( 1 , 1 ) + A( i – 1, j )*r1( 1 , 2 ) + A( i – 1, j + 1 )*r1( 1 , 3 ) +
+ A( i , j – 1 )*r1( 2 , 1 ) + A( i , j )*r1( 2 , 2 ) + A( i , j + 1 )*r1( 2 , 3 ) + A( i + 1 , j – 1 )*r1( 3 , 1 ) + A( i + 1 , j )*r1( 3 , 2 ) + A( i + 1 , j + 1 )*r1( 3 , 3 ); B( 1 , 3 ) = A( i – 1 , j – 1 )*r2( 1 , 1 ) + A( i – 1, j )*r2( 1 , 2 ) + A( i – 1, j + 1 )*r2( 1 , 3 ) +
+ A( i , j – 1 )*r2( 2 , 1 ) + A( i , j )*r24( 2 , 2 ) + A( i , j + 1 )*r2( 2 , 3 ) + A( i + 1 , j – 1 )*r2( 3 , 1 ) + A( i + 1 , j )*83,2) + A( i + 1 , j + 1 )*r2( 3 , 3 ); B(1,4) = A( i – 1 , j – 1 )*r3( 1 , 1 ) + A( i – 1, j )*r3( 1 , 2 ) + A( i – 1, j + 1 )*r3( 1 , 3 ) +
+ A( i , j – 1 )*r3( 2 , 1 ) + A( i , j )*r3( 2 , 2 ) + A( i , j + 1 )*r3( 2 , 3 ) + A( i + 1 , j – 1 )*r3( 3 , 1 ) + A( i + 1 , j )*r3( 3 , 2 ) + A( i + 1 , j + 1 )*r3( 3 , 3 ); B(1,5) = A( i – 1 , j – 1 )*r4( 1 , 1 ) + A( i – 1, j )*r4( 1 , 2 ) + A( i – 1, j + 1 )*r4( 1 , 3 ) +
+ A( i , j – 1 )*r4( 2 , 1 ) + A( i , j )*r4( 2 , 2 ) + A( i , j + 1 )*r4( 2 , 3 ) + A( i + 1 , j – 1 )*r4( 3 , 1 ) + A( i + 1 , j )*r4( 3 , 2 ) + A( i + 1 , j + 1 )*r4( 3 , 3 ); B(1,6) = A( i – 1 , j – 1 )*r5( 1 , 1 ) + A( i – 1, j )*r5( 1 , 2 ) + A( i – 1, j + 1 )*r5( 1 , 3 ) +
+ A( i , j – 1 )*r5( 2 , 1 ) + A( i , j )*r5( 2 , 2 ) + A( i , j + 1 )*r5( 2 , 3 ) + A( i + 1 , j – 1 )*r5( 3 , 1 ) + A( i + 1 , j )*r5( 3 , 2 ) + A( i + 1 , j + 1 )*r5( 3 , 3 ); B(1,7) = A( i – 1 , j – 1 )*r6( 1 , 1 ) + A( i – 1, j )*r6( 1 , 2 ) + A( i – 1, j + 1 )*r6( 1 , 3 ) +
+ A( i , j – 1 )*r6( 2 , 1 ) + A( i , j )*r6( 2 , 2 ) + A( i , j + 1 )*r6( 2 , 3 ) + A( i + 1 , j – 1 )*r6( 3 , 1 ) + A( i + 1 , j )*r6( 3 , 2 ) + A( i + 1 , j + 1 )*r6( 3 , 3 ); B(1,8) = A( i – 1 , j – 1 )*r7( 1 , 1 ) + A( i – 1, j )*r7( 1 , 2 ) + A( i – 1, j + 1 )*r7( 1 , 3 ) +
+ A( i , j – 1 )*r7( 2 , 1 ) + A( i , j )*r7( 2 , 2 ) + A( i , j + 1 )*r7( 2 , 3 ) + A( i + 1 , j – 1 )*r7( 3 , 1 ) + A( i + 1 , j )*r7( 3 , 2 ) + A( i + 1 , j + 1 )*r7( 3 , 3 ); for m = 1 : 1 : 8 for n = 1 : 1 : 8 if B( 1 , m ) >= valor valor = B( 1 , m ); end end end C( i , j ) = valor;
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
13
Otra manera más eficaz de código implementado utilizando MatLAB:
function robinson(A) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); B = zeros( 1 , 8 ); r=zeros(1,8,3,3); r( 1 , 1 ) = [ 1 , 0 , –1 ; 2 , 0 , –2 ; 1 , 0 , –1 ]; r( 1 , 2 ) = [ 0 , –1 , –2 ; 1 , 0 , –1 ; 2 , 1 , 0 ]; r( 1 , 3 ) = [ –1 , –2 , –1 ; 0 , 0 , 0 ; 1 , 2 , 1 ]; r( 1 , 4 ) = [ –2 , –1 , 0 ; –1 , 0 , 1 ; 0 , 1 , 2 ]; r( 1 , 5 ) = [ –1 , 0 , 1 ; –2 , 0 , 2 ; –1 , 0 , 1 ]; r( 1 , 6 ) = [ 0 , 1 , 2 ; –1 , 0 , 1 ; –2 , –1 , 0 ]; r( 1 , 7 ) = [ 1 , 2 , 1 ; 0 , 0 , 0 ; –1 , –2 , –1 ]; r( 1 , 8 ) = [ 2 , 1 , 0 ; 1 , 0 , –1 ; 0 , –1 , –2 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
for p = 1 : 1 : 8 B( 1 , p ) = A( i – 1 : i + 1 , j – 1 : j + 1 )*.r( 1 , p ); end for m = 1 : 1 : 8 for n = 1 : 1 : 8
if B( 1 , m ) >= B( 1 , n ) valor = B( 1 , m );
end end end C( i , j ) = valor; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
14
(a)
(b) (c)
(d) (e)
(f) (g)
(h) (i)
Figura 9.9. (a) Imagen real; (b) Norte; (c) Noroeste; (d) Oeste; (e) Suroeste; (f) Sur; (g) Sureste; (h) Este; (i) Noreste.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
15
9.3. Operadores basados en la primera derivada: Gradiente.
Es el método más común para detectar discontinuidades significativas en el nivel
de gris ya que un borde es la frontera entre dos regiones con propiedades de nivel de
gris relativamente distintas. Durante los siguientes apartados supondremos que dichas regiones son lo suficientemente homogéneas como para que la transición entre dos de ellas se pueda determinar mediante las discontinuidades de nivel de gris.
En este caso, existen distintas definiciones de lo que es un borde, cada una aplicable a distintas circunstancias.
Como se puede observar en la Figura 9.10 la primera derivada es positiva para cambio a nivel de gris más claro, negativa en caso contrario y cero en aquellas zonas con nivel de gris uniforme. La segunda derivada presenta valor positivo en la zona oscura de cada borde, valor negativo en la zona clara de cada borde y valor cero en las zonas de valor de gris constante y justo en la posición de los bordes. El valor de la magnitud de la primera derivada nos sirve para detectar la presencia de bordes, mientras que el signo de la segunda derivada nos indica si el píxel pertenece a la zona clara o a la zona oscura. Además, la segunda derivada presenta siempre un cruce por cero en el punto medio de la transición (esto puede ser muy útil para localizar bordes en una imagen).
Figura 9.10. Aprovechamiento la teoría de diferenciabilidad a la detección de bordes.
PERFIL HORIZONTAL
PRIMERA DERIVADA
SEGUNDA DERIVADA

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
16
Aunque lo que llevamos dicho se refiere a perfiles unidimensionales, la extensión a dos dimensiones es inmediata. Simplemente se define el perfil en la dirección perpendicular a la dirección del borde y la interpretación anterior seguirá siendo válida.
La primera derivada en cualquier punto de la imagen vendrá dada por la magnitud del gradiente∇∇∇∇, mientras que la segunda derivada vendrá dada por el operador Laplaciano∇∇∇∇2.
9.3.1. Operadores basados en la definición de gradiente.
Básicamente, la idea que dimana en la mayor parte de las técnicas de detección
de bordes es el cálculo de un operador local de derivación. Una definición posible es que un píxel pertenece a un borde si se produce un cambio entre niveles de grises con
sus vecinos. Mientras más brusco sea el cambio, más fácil es detectar el borde.
El primer problema que surge usando esta definición es debido a la digitalización. El segundo problema es debido al ruido. Gradiente: El gradiente mide la máxima variación de una función f(x,y) en un punto P. Si f(x,y) fuera una función bidimensional continua, la definición de gradiente sería:
( ) ( )( )
( )( )
( )
( )
∂∂=
∂∂=
=⇒
∂∂∂∂
=∇=yxf
yG
yxfx
G
conG
GyxfG
yxfy
yxfx
yxfyxfG
y
x
y
x
,
,
,,,
,
,, (5)
El vector gradiente nos da la dirección de variación máxima de f en el punto
(x,y) por unidad de distancia. En este caso, sería probable que un píxel pertenezca a un borde si el módulo del gradiente
( ) ( ) ( )22
22 ,,,
∂∂+
∂∂=+= yxf
yyxf
xGGyxfG yx (6)
es lo suficientemente "grande". La dirección del gradiente viene determinada
por:
( )
( )
∂∂∂∂
=
=
yxfx
yxfy
arctgG
Garctg
x
y
,
,
φ (7)
El valor de |Gf(x,y)| es un número real que se suele convertir al entero más
próximo. Cualquier píxel cuya magnitud |Gf(x,y)| exceda de un valor umbral T especificado de antemano, diremos que pertenece a un borde. Normalmente, este valor umbral es el valor medio en el rango de niveles de grises usados en la imagen.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
17
Una aproximación del gradiente de una imagen (asumiendo que las variaciones se dan únicamente horizontal y/o verticalmente) sería:
( ) ( ) ( )
( ) ( ) ( )y
yxfyyxf
y
yxfG
x
yxfyxxf
x
yxfG
y
x
∆−∆+=
∂∂=
∆−∆+=
∂∂=
,,,
,,,
(8)
En imágenes discretas se puede considerar dx y dy en términos del número de
píxeles entre dos puntos. Así, cuando dx=dy=1 y el punto donde vamos a medir el gradiente tiene coordenadas (i,j) tenemos que:
( ) ( )( ) ( )jifjifG
jifjifG
y
x
,1,
,,1
−+=−+=
(9)
Para la implementación y computación del gradiente se utilizan máscaras o filtros que representan o equivalen a dichas ecuaciones. En este caso, computar el gradiente sobre toda una imagen con las condiciones de que dx=dy=1 consiste en convolucionar la imagen con unas máscaras del tipo:
−=
000
100
010
xG
−=000
010
100
yG (10)
Una mejor aproximación podría ser:
( ) ( ) ( )
( ) ( ) ( )y
yyxfyyxf
y
yxfG
x
yxxfyxxf
x
yxfG
y
x
∆∆−−∆+=
∂∂=
∆∆−−∆+=
∂∂=
,,,
,,,
(11)
En imágenes discretas se puede considerar dx y dy en términos del número de
píxeles entre dos puntos. Así, cuando dx=dy=1 y el punto donde vamos a medir el gradiente tiene coordenadas (i,j) tenemos que:
( ) ( )( ) ( )1,1,
,1,1
−−+=−−+=jifjifG
jifjifG
y
x (12)
Para la implementación y computación del gradiente se utilizan máscaras o filtros que representan o equivalen a dichas ecuaciones. En este caso, computar el gradiente sobre toda una imagen con las condiciones de que dx=dy=1 consiste en convolucionar la imagen con unas máscaras del tipo:
−=000
101
000
xG
−=
010
000
010
yG (13)

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
18
(a)
(b) (c)
(b) (c)
Figura 9.11. (a) Imagen original; (b) Primera aproximación Gx; (c) Primera aproximación Gy; (c) Segunda aproximación Gx; (d) Segunda aproximación Gy.
Tal y como se pueden observar en las figuras anteriores, el gradiente Gx, detecta los bordes verticales y el operador Gy los horizontales (a priori, podríamos pensar que esta situación debería estar invertida). Esto es debido así a que el operador Gx detecta las variaciones que se producen con x fija. De igual manera, podemos apreciar la mejora de la segunda aproximación respecto la primera.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
19
Código implementado utilizando MatLAB:
function gradiente(A, T, aproximacion) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); G = zeros( 1 , 2 ); Gx1 = [ 0 , –1 , 0 ; 0 , 0 , 1 ; 0 , 0 , 0 ]; Gy1 = [ 0 , 0 , 1 ; 0 , –1 , 0 ; 0 , 0 , 0 ]; Gx2 = [ 0 , 0 , 0 ; 1 , 0 , –1 ; 0 , 0 , 0 ]; Gy2 = [ 0 , –1 , 0 ; 0 , 0 , 0 ; 0 , 1 , 0 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1
if aproximacion == 1 G( 1, 1 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Gx1 );
G( 1, 2 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Gy1 ); else
G( 1, 1 ) = sum (A( i – 1 : i + 1 , j – 1 : j + 1 ).*Gx2 ); G( 1, 2 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Gy2 ); end if sqrt(G( 1, 1 )^2 + G( 1, 2 )^2) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
20
El problema de este método aparece puesto que no se tiene en cuenta el valor de la imagen en dicho píxel, ni los píxeles que se encuentran en la diagonal. Cualquiera que sea el operador usado para calcular el gradiente, el vector resultante contiene información sobre la probabilidad de que un píxel pertenezca a un borde y qué dirección debemos seguir.
(a) (b)
(c)
Figura 9.12. (a) Imagen original; (b) Imagen de la magnitud del gradiente considerando un umbral de T = 80; (c) Imagen binarizada.
9.3.2. Operadores de Prewitt.
Los operadores gradiente tienen el efecto de magnificar el ruido subadyacente en
la imagen. El operador de Prewitt tiene la propiedad de suavizar la imagen, eliminando parte del ruido y, por consiguiente, minimizando la aparición de falsos bordes debido al efecto de magnificación de ruido por parte de los operadores derivada. Si suponemos una imagen dada por:
=Ζ
987
654
321
zzz
zzz
zzz
(14)
donde los distintos valores de z son los niveles de gris de los píxeles solapados por las máscaras en cualquier localización de la imagen.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
21
Para obtener los valores de las componentes del vector de Prewitt en el punto definido por el píxel central z5 se utilizan las siguientes expresiones:
( ) ( )( ) ( )321987
741963
zzzzzzP
zzzzzzP
y
x
++−++=++−++=
(15)
De donde se obtiene las máscaras:
−−−
=101
101
101
xP
−−−=
111
000
111
yP (16)
(a) (b)
(c) (d)
(e) (f)
Figura 9.13. Aplicación de Prewitt: (a) Imagen original, (b) Bordes detectados mediante |P|, (c) Bordes detectados mediante |Px|, (d) Bordes detectados mediante |Py|, (e) Imagen
resultante considerando T = 10, (f) Imagen resultante considerando T = 20.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
22
Código implementado utilizando MatLAB:
function prewitt(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); P = zeros( 1 , 2 ); Px = [ 1 , 0 , –1 ; 1 , 0 , –1; 1 , 0 , –1]; Py = [ 1 , 1 , 1 ; 0 , 0 , 0 ; –1 , –1 , –1 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 P( 1, 1 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Px );
P( 1, 2 ) = sum (A( i – 1 : i + 1 , j – 1 : j + 1 ).*Py ); end if sqrt(abs(P( 1, 1 )) + abs(P( 1, 2 ))) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
23
function prewittx(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); Px = [ 1 , 0 , –1 ; 1 , 0 , –1; 1 , 0 , –1]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 P = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Px );
end if sqrt(abs(P)) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
24
function prewitty(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); Py = [ 1 , 1 , 1 ; 0 , 0 , 0 ; –1 , –1 , –1 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 P = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Py );
end if sqrt(abs(P)) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
25
9.3.3. Operadores de Sobel.
El operador de Sobel es similar al de Prewitt pero, en este caso, se suelen usar dos máscaras: una para la primera componente del vector y otra para la segunda componente del mismo. Dichas máscaras, que se llaman operadores de Sobel, son:
−−−
=101
202
101
xS
−−−=
121
000
121
yS (17)
Si (a,b) es el vector gradiente de un píxel calculado usando los operadores de Sobel, para calcular la máxima variación de f(x,y) en la dirección del gradiente, se suele calcular la suma del valor absoluto de sus coordenadas en lugar del módulo (por ser menos costoso, computacionalmente hablando). Observemos que en las máscaras de Sobel, tienen más peso los píxeles situados en posición vertical y horizontal respecto el píxel estudiado que los situados en la diagonal.
(a) (b)
(c) (d)
Figura 9.14. Aplicación de Sobel: (a) Imagen real; (b) Resultando de aplicar |Sx|; (c) Resultando de aplicar |Sy|; (b) Resultando de aplicar |Sx| + |Sy|.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
26
Código implementado utilizando MatLAB:
function sobel(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); S = zeros( 1 , 2 ); Sx = [ 1 , 0 , –1 ; 2 , 0 , –2; 1 , 0 , –1 ]; Sy = [ 1 , 2 , 1 ; 0 , 0 , 0 ; –1 , –2 , –1 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 S( 1, 1 ) = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Sx );
S( 1, 2 ) = sum (A( i – 1 : i + 1 , j – 1 : j + 1 ).*Sy ); end if sqrt(abs(S( 1, 1 )) + abs(S( 1, 2 ))) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
27
function sobelx(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); Sx = [ 1 , 0 , –1 ; 2 , 0 , –2; 1 , 0 , –1 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 S = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Sx );
end if sqrt(abs(S)) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
28
function sobely(A, T) [ f c ] = size(A); A( : , c + 1) = zeros( f , 1 ); A( f + 1 , : ) = zeros( 1 , c + 1 ); for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i , j – 1 ); end end for i = c + 1 : 1 : 2 for j = f + 1 : 1 : 2 A( i , j ) = A( i – 1, j ); end end A( : , 1 ) = zeros( f + 1 , 1 ); A( 1 , : ) = zeros( 1 , c + 1 ); A( : , c + 2 ) = zeros( f + 1 , 1 ); A( f + 2 , : ) = zeros( 1 , c + 2 ); C = zeros( f + 2, c + 2 ); Sy = [ 1 , 2 , 1 ; 0 , 0 , 0 ; –1 , –2 , –1 ]; for i = 2 : 1 : f + 1 for j = 2 : 1 : c + 1 S = sum( A( i – 1 : i + 1 , j – 1 : j + 1 ).*Sy );
end if sqrt(abs(S)) >= T C( i , j ) = 255; else C( i , j ) = 0; end
end end return

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
29
9.4. Operadores basados en la segunda derivada: Laplaciano.
Laplaciano: El laplaciano de una función bidimensional es una operación derivada de segundo orden definida por:
( )( )
( )
∂∂∂∂
=∇yxf
y
yxfx
yxf
,
,
,
2
2
2
2
2 (18)
El principio en que se base este método consiste en encontrar las posiciones en
una imagen donde la segunda derivada toma el valor 0.
Figura 9.15. (a) Detección de bordes; (b) Paso por cero; (c) Extremos absolutos.
Como en el caso del gradiente, la ecuación del laplaciano puede implementarse
en forma digital de varias maneras: . Una de las más frecuentes en la práctica es aplicar las siguientes máscaras:
;
010
141
010
1
−−−
−=L ;
121
242
121
2
−−−
−=L ;
111
181
111
3
−−−−−−−−
=L (19)
El requisito básico para la definición de laplaciano digital es que el coeficiente
asociado con los píxeles exteriores sea negativo. Como el laplaciano es una derivada, la suma de los coeficientes debe ser cero. En consecuencia, la respuesta es cero siempre que el punto en cuestión y sus vecinos tengan el mismo valor.
Aunque el Laplaciano responde a las transiciones de intensidad, rara vez se utiliza en la práctica para la detección de bordes:
• Los operadores basados en la primera derivada son sensibles al ruido en imágenes. El Laplaciano aún lo es más.
• Genera bordes dobles. • No existe información direccional de los ejes detectados.
(a) (b) (c)
( ) ( )864252 4, zzzzzyxf +++−=∇

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
30
En orden de minimizar los efectos del ruido, un método consiste en conjuntar con la operación de detección de ejes un proceso de suavizado de la imagen.
Uno de los métodos más utilizados es el suavizado por medio de una Gaussiana:
• Convolucionar la imagen original con un filtro gaussiano. • Calcular las derivas sobre la imagen suavizada.
Como ambas operaciones son lineales podemos combinar ambas operaciones de diferentes formas:
• Suavizado de la imagen y cálculo de la 2ª derivada. • Convolución de la imagen original utilizando el laplaciano del Gaussiano (Mapa
de transición logarítmico).
Este método de detección de ejes fue propuesto por primera vez por Marrand-
Hildreth quienes introdujeron el principio de detecciones mediante el método de cruces por cero.
(a) (b)
(c) (d)
Figura 9.16. Aplicación del laplaciano: (a) Imagen original; (b) Resultado de aplicar L1; (c) Resultado de aplicar L2; (c) Resultado de aplicar L3.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
31
9.5. Operador de Canny.
Es el detector de bordes más poderoso que existe actualmente. Los pasos
principales del algoritmo son:
• Se convoluciona f con filtros gaussianos unidimensionales. De esta forma la imagen se suaviza (eliminación de ruidos).
• A continuación, se calcula el gradiente de la imagen suavizada usando una aproximación del gradiente de la función gaussiana (para determinar los píxeles donde se produce máxima variación).
• La matriz M correspondiente al módulo del gradiente da la función gaussiana tendrá valores grandes donde la variación de la intensidad sea grande. Se realiza, por tanto, un tresholding, eliminando aquellos píxeles que no tienen una magnitud (módulo del gradiente) alta.
• Posteriormente se realiza un proceso de eliminación de falsos bordes y realzado de bordes poco definidos. Este proceso se realiza eliminando aquellos píxeles que no son máximos locales.
Un ejemplo de aplicación de este método es el siguiente:
Figura 9.17. Resultados de aplicar el operador Canny.
Componente X de la convolución Gaussiana
Componente Y de la convolución Gaussiana
Componente X de la convolución de la derivada Gaussiana
Componente Y de la convolución de la derivada Gaussiana
Magnitud de la derivada Gaussiana
Supresión de los elementos no máximos

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
32
Un ejemplo comparando el detector de bordes de Sobel y de Canny es el siguiente:
Figura 9.18. (a) Imagen al aplicar Sobel; (b) Imagen al aplicar Canny.
En resumen, la detección de bordes usando operadores de aproximación del
gradiente tiende a funcionar bien en los casos en que se involucran imágenes con transiciones de intensidad claramente definidas y ruidos relativamente bajos. Los pasos por cero ofrecen una alternativa en los casos en que los bordes están emborronados o cuando está presente un alto contenido de ruido. El paso por cero ofrece fiabilidad en las localizaciones de bordes y la propiedad de suavizado de la convolución gaussiana reducen los efectos del ruido. El precio a pagar por estas ventajas es el incremento de complejidad de cálculo y tiempo.
(a) (b)

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
33
9.6. Problemas en los operadores para la detección de bordes.
Existen ciertos problemas comunes en todos los operadores que utilizan el gradiente para la detección de bordes:
• Se deben de realizar elecciones en valores umbral (corte) y tamaño de las
máscaras a utilizar (el tamaño condiciona el grado de suavizado, el cual puede afectar a las detecciones por cruce por cero y al máximo gradiente sobre una imagen). La posición estimada de un borde debería ser independiente del tamaño de la máscara de convolución.
• Las esquinas son a menudo omitidas a causa de que el gradiente (1D) sobre las esquinas es normalmente pequeño. Esto puede causar considerables dificultades para el etiquetado de líneas ya que éstas pueden aparecer discontinuas.
• Los operadores de primera derivada detectan solamente step-like. Si uno quiere encontrar líneas se necesita utilizar operadores diferentes (por ejemplo Canny).
• Proceso diferenciales aplicados en la detección de bordes generan falsos positivos y falsos negativos.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
34
9.7. Bibliografía.
Tratamiento Digital de Imágenes. Rafael C. González, Richard E. Woods.
Visión por Computador, Imágenes digitales y aplicaciones. Gonzalo Pajares, Jesús M. de la Cruz.

Tema 9 – Detección de bordes BLOQUE II: Sistemas de Visión Artificial
Física de la Visión Jaime Martínez Verdú
35
Visión por Computador. Javier González Jiménez.
Visión por Computador, Fundamentos y Métodos. Arturo de la Escalera.

"!
#"$ %'&(*),+.-0/1(23+54768:9<;=3>,-;?,=
@BAC@A DEGFIHKJBLENMPORQTSU.V*WYX[Z\^]`_a[WbdceWf\hgjilkmconjbknpbXqZcorsi`VtXu_vVtX^]`_a[WbdceWYXxw`k:coVoi`rconPX[Wcey[nzkfZvkV.w`k
rk|d\[_Xu_*i`n~ZceZdbkr~Xvw`kcoVoi`rconPX[Wcey[n^pXvk7ceZdbknpbkKTXu_XkVoVe\sVe\v]`_dcork_\gjilkPXfgjilk^PX[Wfk_kfZWf\[r]`_\[PXu_gpilkqkVZdceZbkr~XkfZ:rk|d\[_Xu`VekT]PXu_XkVoVe\Zk_kYXuVocoXunVtX[Z^rkfw7cewlX[ZxWf\[nkVGVoi7`y[rkbd_\Kk_xgpilkkfZxw`kPWceknpbk,*`pT`j ¢¡0£B¤1zK¥Y¦u§Y¤1 §¨¦©ªj«¬`¦uK§1z¬¦u§P®`¦ z¢ ¢¡z¢«0`j¯¤ª«°B¡p£0¯Y¥Y²±¬I§j¦f³§1¦´`¦[ µ««¢«0¶ª·«K`Y§¨¸K±°B¡h¢¡ ¯`¦pY`K§1«T¯j¯§ª«0j
¹"nPX"KkgjilkZk*bdceknlkVtX"ºKkf\[rkbd_d»tXGw`kV7Ve\µWYXuVjvVtX[ZY\[nPX[ZTw`k bd_XuPX´|¼\:½r»on`cor\w`k^w`\Z¾PXfzgjilk]`_\[]ª\[nlk_3i`n']`_\YKkfWb\w`k~coVoi`rconPX[Wcey[n¿XuVobk_dnPXubdcoK\`]PXu_XZkilZXu_a:kVB]`_\[º_Xur~XÀÁ1ÂpÃ[ÄÆÅ.ÇÁP
@BA¯ÈTA É1ʲË*MÌIQ`ÍÏÎTË*M'MPÐÑHKMlÒ0QªH`ÓU.VPWlk_\w`kV]`_\[º_Xur~X7*ÔÕXf'gjilk^knjjctXu_dVe\XVtXw7co_kfWfWcey[nÖÃp×ÄÆǯØuÙÚµÛ3Ü7ݯÞØ
Wf\[nkV0X[Zdi`npb\3ßÇÄÆÚµÛ:ǯÁ1Ãp×Ç¢àÁPáâ kk[XuVoiPXu_aãÕkfZW_dco]ªWcey[nw`kvVtX3coVoi`rconPX[Wcey[nXunjbk_dce\[_YU.VekfWfWcey[nw`kVtX[ZVoi`rconPXu_dctX[Zä \[Ve\jWYX[Wcey[nw`kÕVtX[ZVoi`rconPXu_dctX[ZãÕkfZW_dco]ªWcey[nw`kvVe\Z_kfZdi`VobX[w`\Z
åv$ æ^&>/1>"9<;+.="/ª(ç2m;è";¼/1>,6h23+é;9<>,è,+.=3+.ê
U.V1\[7|dkbdcoK\mw`kGkfZdbav]`_a[WbdceWYX3kfZ gpilkGkVªXuVoi`rnl\:ZkëNXurcoVoctXu_dceWfkGWf\[nxkVPbd_X[gjbX´ìrceknjb\:w7coºcobXuVw`kGcor~XuºKknlkfZY7TXu_XmkfZbk"]`_\[]\Zdcob\3Zk,PXmWf\[rsbXunlw`\:i`nPXmWYaur~Xu_Xää ãgjilkkfZdbaÕWf\[nlkfWbXmXíconpbk_dnlkbI3rkfw7ctXunpbkGkVlnPXfKkºpX[w`\[_Zk]`ilkfw`kn^X[w`gji`co_dco_VtX[Z"w7ceZdbdnpbX[Z"cor~XuºKînlkfZYðïñNòµó,ôõ÷öNøù¼ù¼õ÷úûü¢ý^ô´ø ô´þûuô´ø.ÿ øIø¼ûuù ø¼û öCó óù,óöCó,ÿ ø ødô´ø.ùþûuÿ CóöTøû óõ÷û[ó,ôø
Æóóÿ õóû öCó ô´õNø øÿ´öCóùNõ÷ùdóÿ ! ÿ óöNõ÷þø¼ÿ!"$#%&(')Æó ù ó+*ø,"!#%&-
.

U.V7]`_\[º_Xur~XvgpilkZk XíXGi`bdcoVocoXu_.]PXu_Xí_kYXuVocoXu_.VtX[Z]`_a[WbdceWYX[Z*kfZ,×NÃ[ÞKkfZdbk]`_\[º_Xur~XbdceknlkÕi`nPX3ë¢\[_dr~X:w`kÕbd_XuPX´|Xu_,ZdcorcoVtXu_"X3]`_\[º_Xur~X[ZGWf\[rkn`_WctXuVekfZ"Wf\uìr\Ã¢Ä Ãfj]k_\3Wf\[n^VtX3w7c ë k_knlWctX3gpilkÕZkGbd_XubX3w`kGi`nPXm]`_\[º_Xur~X3Wf\[nxVoceWfknlWctX 1U.nWVtX[Zksw`kmVtXuª\[_Xub\[_dce\xZks_kYXuVocoXu_a^VtX[ZGk7]`VoceWYX[Wce\[nlkfZÕPa[ZdceWYX[Zíw`kV0ë¢i`n7ìWce\[nPXurceknjb\w`kV1]`_\[º_Xur~X7`TXu_X3WiPXuVegpi`cek_Wf\[nlZdi`VobXmZkG]`ilkfw`kíilZXu_ WiPXuVegji`cek_Xw`ksVe\Z"rmi`Vobdco]`VekfZír~XunpiPXuVekfZÕw`kÃ¢Ä Ãm\w`k,×NÃuÞgpilkmkµceZdbknB1U.nVtX]PauºconPXw`kÕVtX~X[ZdcoºnPXubdi`_XkfZdbaWf\[Ve\µWYX[w`\kVr~XunjiPXuVw`k,×NÃ[Þ
U.VvZdceZdbkr~X\[]ªk_XubdcoK\gjilk[X'X¨ilZXu_xkn kVÕVtXuPX[\[_Xub\[_dce\kfZ.ǯÁlÚWYX[wlX]PXu_k|Xw`k,]`_a[WbdceWYX[Z bknlw7_amX[Z\µWctX[wlXvi`nPXWilknjbXkn^kV1\[_w`knPX[w`\[_ 1ǯÁ[ÝoÚµÛ3Ü7ÝÞØkfZbkí\[_w`knPX[w`\[_"bdceknlkvconlZdbXuVtX[w`\kVBZ\uë¢bXu_kÕnlkfWfkfZXu_dce\]PXu_X3VtXm_kYXuVocoX[Wcey[nw`kíVtX]`_a[WbdceWYX7
È.AC@A DEGFIHKJBLENMPORQTS0X]`_a[WbdceWYXZdcorsi`VtXi`nZdceZdbkr~Xw`këNau`_dceWYX[Wcey[nWf\[npbd_\[VtX[w`\_kr\[bXurknjbk
w`\[nlw`kZk3ëNXu`_dceWYXunzXu_dce\Zvbdco]ª\Zmw`k]`cekX[Z½¢Wco_Wi`VtXu_kfZm_kfWbXun`ºi`VtXu_kfZ¾ â k[XPXhW_kYXu_si`nzZdceZbkr~Xqw`k~Wf\[njbd_\[V w`k~WYXuVocewlX[w¨knzkVIgjilkZkbdceknlkgpilkrkfw7co_sVtX[ZWYXu_Xubk_d»eZbdceWYX[Zmw`kVtX[Z]`cekX[ZsWco_Wi`VtXu_kfZY0]PXu_XqkVoVe\qVe\Z]`_dcork_\Zs]PX[Z\Zsgjilk:PXfgjilkÕXur\Z"X:_kYXuVocoXu_"Z\[n
È.A¯ÈTA MPQE! `Q#"$!%Ð'&IMECQFIH(#"µÑ"7Q0Xq]`_a[WbdceWYX²Wf\[nlZdceZdbk~kn'X[w`gpi`co_dco_mVtXxcor~XuºKkn¨w`k~VtX ää ãé_kYXuVocoXu_3Ve\ZsZdc ì
ºi`ceknjbkfZ,]PX[Z\Z. *)"kYXuVocoXu_,i`nPXcoºiPXuVtX[Wcey[nw`kÕ`ceZdb\[º_Xur~X7+ ä \[npKk_dbdco_íVtX3cor~XuºKknknq`conPXu_dctX~w`kÕbXuVë¢\[_dr~XgpilkÕr~Xunjbkn`ºpXVe\Z,\[7|dkb\Z
gpilkvZkvknlWilknpbd_XunknhkVoVtX7, U.VocorconPXu_"Ve\Z"\[7|¼kb\ZGgpilkÕnl\ZkYXunWco_Wi`VtXu_kfZY-l*)"kYXuVocoXu_,i`nPXw`kbkfWfWcey[nw`kÕ\[_w`kvrkfw7ctXunpbksVtX/.0.21v
È.A43TA É1ʲË*MÌIQ`ÍÏÎTË*M'MPÐÑHKMlÒ0QªH`Ó¹"ncon7ë \[_drk"w`k,b\jw`\Z Ve\Z*]PX[Z\Z gpilk"ZkPXun_kYXuVocoX[w`\mkVl_XuY\[nPXurceknpb\:w`kV
]\[_gjilî ZkIPXGilZX[w`\GkfZ\Z0]PX[Z\Z6587:9 D 7<; D=?>@BA0CEDGFH"D/D D 7<; DDHJIKMLNC= 9 I 9 D D 7<; >NL 9PO
Q lÿ Nþÿ [óÿ þÿSR[û´õpÿ þû NþYô´þÿ, þÿ0T øTø¼ÿ ûUuû´õjøÿ Cóû NþYô´þÿ,÷þÿ8T øTÿ þû
+

Práctica 1
Proyecto de iluminación
Asignatura: Física de la Visión
Profesor: Roque Fernando Madrigal Madrigal
Alumnos:
María de las Nieves Robles Botella
Jaime Martínez Verdú

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
1
1. Descripción de la iluminación anterior.
Después de un proceso de selección de datos hemos obtenido una serie de resultados que vienen representados en la siguiente figura:
Banco de T
rabajo 186
206 285
305 265
200
Centro de m
ecanizado
Luz de trabajo en el plato 1170
Atril
182
77 150 200 100 50
194 203 160
215 283
266
298 289
337
281
299
265
223
253
215
234
200
192
250
292
231
200 166
177
230
Tor
no d
e co
ntro
l num
éric
o C
NC
Luz
en
el p
orta
herr
amie
ntas
790
L
uz e
n la
pan
tall
a de
440
F
resa
dora
Uni
vers
al
L
uz e
n el
por
tahe
rram
ient
as 1
005
Luz
en
la p
anta
lla
de 3
30
265
221
200
235
220
212
241
260
265
290
312
271
262 251
260
261
252
250
212 241

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
2
Se puede observar que los pasillos presentan niveles apropiados para áreas de
circulación o áreas no utilizadas para trabajar puesto que corresponden a valores por encima de los 200 lux (mientras que la norma obliga a que sean valores entre 50 y 200 lux). Con respecto a la zona variada podemos decir que una iluminación de 250 o 300 lux es la correcta tal y como indica la norma.
Con respecto a las zonas de trabajo como la correspondiente a la fresadora como
para el centro de mecanizado o el torno, tenemos valores cercanos a los 700 y 1.000 lux valores para los cuales la norma obliga a que estén entre 750 y 1.500 puesto que son tareas con exigencias visuales normales y difíciles también.
Por último, hablar sobre el banco de trabajo donde aparecen iluminaciones de
valores entre 250 y 300 lux, valores correctos pues se trata de tareas visuales escasas y,
en algunas ocasiones, medias.

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
3
2. Elección de las luminarias.
Se ha optado por aquellas lámparas que son fluorescentes, ya que tienen unas características adecuadas para la utilización en el local:
• Ofrecen una eficiencia luminosa de 90 lúmenes por vatio. • Se caracterizan por tener una vida media de entre 5000 y 7000 horas. • Índice de Reproducción Cromática del 80%, el cual depende del recubrimiento. • Dependiendo de la temperatura el color de la luz varía desde un color cálido (Tª
baja), hasta un color frío (Tª alta).
Como las luminarias son las responsables del control y la distribución de la luz emitida por la lámpara, se ha tenido en cuenta a la hora de elegir las luminarias:
• La distribución de la luz, el rendimiento del conjunto lámpara – luminaria,
además de su instalación y mantenimiento. • Los materiales de las luminarias elegidas son adecuados para resistir el medio
ambiente en el que van ha trabajar las luminarias.
Por tanto, se opta por utilizar unas luminarias directas, ya que se requiere que la el flujo luminoso se emita mayoritariamente por debajo del plano horizontal que atraviesa la lámpara, con dos planos de simetría y que el grado de protección contra el polvo sea alto, ya que van a ser utilizadas en una fábrica, razón por la cual las luminarias son cerradas.
Se ha realizado una división del local en cinco zonas distintas dependiendo de su funcionalidad, ya que en cada una de ellas se requiere una iluminación diferente:

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
4
3. Colocación de las luminarias.
Zona "torno y fresa"
En la zona definida como "torno y fresa" se ha colocado 14 luminarias modelo 651-IXC (de 58 W) con una disposición en doble hilera, abarcando así toda la zona de trabajo. Esta elección y distribución de las luminarias se debe a que la zona a tratar se puede considerar como zona de exigencia visual difícil, ya que los trabajos realizados requieren de una notable precisión.
Como se puede ver, las luminarias se encuentran separadas una distancia de 2 m
y con una suspensión de 3 m. Con estos parámetros se mejoran la homogeneidad y la intensidad luminosa, puesto que si aumentamos la distancia entre ellas el factor de uniformidad media disminuye, y si la luminaria se encuentra a la altura del local (4 m) la intensidad también es menor.
Centro mecanizado
Al igual que en el caso anterior, esta zona ha de tener unas características de
iluminación bastante buenas (se requiere de una exigencia visual especial de unos 1000 lux − 1500 lux). Por esta razón, se ha optado en este caso por la utilización de 8 luminarias modelo 651-IXC (de 58 W) con una disposición en doble hilera obteniendo, de esta forma, la iluminación requerida y una homogeneidad elevada.
Los datos de la distancia entre luminarias y de suspensión, son idénticos al caso
anterior por el mismo motivo pues con estos parámetros se mejoran la homogeneidad y la intensidad luminosa.
Bancos de trabajo
El nivel de iluminación requerido en esta zona es menor, ya que en ella se
realizan trabajos en los cuales la iluminación debe encontrarse entre 200-300 lux debido a que la exigencia visual es simple. Por tanto, las luminarias seleccionadas, modelo 201-IXC, son de menor potencia concretamente de 18 W, pero la cantidad empleada (cuatro hileras de cuatro luminarias cada una) es mayor debido al área que ocupa la zona y al nivel de uniformidad media y extrema.
La orientación en la disposición de las
luminarias difiere con respecto a las anteriores debido a la disposición de los bancos de trabajo, los cuales se encuentran orientados de manera vertical (la zona con mayor longitud se ubica en el eje X).

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
5
Pasillo
Las luminarias utilizadas en el pasillo son 201-IXC, las cuales proporcionan una
potencia de unos 18 W. No se ha utilizado el otro modelo debido a que en las zonas con estas características, es decir zonas de circulación, el nivel de iluminación es menor que en las zonas de trabajo, ha de variar entre 80-150 lux.
Las luminarias se distribuyen en dos hileras de 4 y 5 luminarias las cuales se
alternan para tener una relativa uniformidad, el número de luminarias con respecto al área es menor que en las otras zonas, la distancia entre ellas es menor y la suspensión de 3.5 m por el mismo motivo de la elección de éstas, es decir, el nivel de iluminación ha de ser bajo.
Zona variada
En esta zona se ha utilizado el modelo de luminaria
correspondiente al 201-IXC. Esta elección no se ha meditado con profundidad, ya que esta zona no es de gran utilidad y su uso se limita a la colocación de objetos y otros utensilios.

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
6
4. Descripción de los resultados
Analizando cada zona por separado obtenemos:
Centro mecanizado
Según la normativa en las zonas que
requieren una exigencia visual especial se ha de obtener entre unos 1000 – 1500 lux.
Los datos obtenidos se encuentran dentro
de los valores tabulados para este tipo de zonas, ya que la iluminación media es de 1471.25 lux, y la uniformidad media y extrema son de 0.74 y 0.59 respectivamente, indicando con estos valores que la iluminación se distribuye de manera homogénea.
Torno y fresa
Los datos obtenidos son similares
a los del caso anterior debido a que la utilización de la zona es muy similar. Por tanto, éstos se encuentran dentro de los valores establecidos por la normativa, teniendo una distribución de iluminación óptima para la realización del trabajo en esa zona.

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
7
Bancos de trabajo
En esta zona la iluminación obtenida es
la idónea para la realización de trabajos que no requieren una exigencia visual alta, que ese es el caso, ya que según la normativa la iluminación ha de encontrarse entre 300 – 500 lux.
Como se puede ver los factores de
uniformidad se encuentran muy próximos a los estipulados por la normativa.
Pasillo
Según los resultados se puede apreciar que la iluminación de esta zona se encuentra muy influenciada por la iluminación de las zonas contiguas al pasillo, ya que éstas presentan una iluminación muy elevada. La iluminación óptima para este tipo de zonas es de 100 – 150 lux (porque la zona es un área de circulación). Por tanto, no se obtiene los valores adecuados, debido a este hecho.

Prácticas de Física de la Visión Ejercicio – Proyecto de iluminación
Jaime Martínez Verdú Mª Nieves Robles Botella
8
Zona variada
Los valores de esta zona no son demasiado importantes ya que su uso no está definido por tanto, los datos no tienen por que encontrarse dentro de lo establecido.
Como se puede observar, los resultados obtenidos son los deseados, ya que las zonas estudiadas cumplen con la normativa según su utilización, es decir, el nivel de iluminación se encuentra dentro del intervalo establecido por la norma.

Práctica 2
Tratamiento Digital de
Imágenes
Asignatura: Física de la Visión
Profesor: Roque Fernando Madrigal Madrigal
Alumnos:
María de las Nieves Robles Botella
Jaime Martínez Verdú

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
1
1. Igualación de Histogramas.
Código:
1 function B=ecualizacion(A)
2 L=256;
3 HIST=zeros(1,L);
4 n=size(A,1)*size(A,2);
5 for i=1:1:size(A,1)
6 for j=1:1:size(A,2)
7 HIST(1,1+A(i,j))=HIST(1,1+A(i,j))+1;
8 endfor
9 endfor
10 for i=1:1:L
11 HIST(1,i)=HIST(1,i)/n;
12 endfor
13 bar(HIST);
14 ACUM=zeros(1,L);
15 ACUM(1,1)=HIST(1,1);
16 for i=2:1:L
17 ACUM(1,i)=ACUM(1,i-1)+HIST(1,i);
18 endfor
19 NORMALIZADO=zeros(1,L);
20 for i=1:1:L
21 NORMALIZADO(1,i)=(i-1)/(L-1);
22 endfor
23 FINAL=zeros(1,L);
24 mascerca=2;
25 nivel=0;
26 for i=1:1:L
27 for j=1:1:L
28 if abs(ACUM(1,i)-NORMALIZADO(1,j))<mascerca
29 mascerca=abs(ACUM(1,i)-NORMALIZADO(1,j));
30 nivel=j;
31 endif
32 endfor
33 FINAL(1,i)=nivel;
34 mascerca=2;
35 endfor
36 B=zeros(size(A,1),size(A,2));
37 for i=1:1:size(A,1)
38 for j=1:1:size(A,2)
39 B(i,j)=FINAL(1,1+A(i,j));
40 endfor
41 endfor
42 imshow(B);
43 endfunction

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
2
Descripción del proceso de Ecualización implementado:
Primeramente inicializamos una variable L que nos permitirá indicar la cantidad
de niveles de grises con el cual estamos tratando la imagen. A continuación,
inicializamos también una nueva variable de tipo vector que va a ser nuestro
histograma, HIST(). En un principio, en cada componente de dicho vector
almacenaremos las repeticiones de los distintos niveles de grises (Figura 1), es decir,
Tal y como se puede observar en el dibujo, nuestro vector tendrá un rango de
256 (una componente asociada a cada nivel de gris) y lo inicializamos a ceros puesto
que iremos incrementando cada componente durante todo el proceso.
También definimos una variable n que nos representa la cantidad de píxeles que
conforma a la imagen que tratamos que, en efecto, es el producto de filas por columnas.
El comando size(A,1) y el size(A,2) nos devuelve las filas de la matriz A y las columnas,
respectivamente.
Mediante dos estructuras de repetición for anidadas podemos recorrer toda la
matriz (a partir de ahora nos referiremos a la imagen como matriz) y cada vez que
avancemos asignaremos un incremento al vector HIST() de la componente
correspondiente al nivel de gris del píxel actual (Figura 2), es decir,
2 L=256;
3 HIST=zeros(1,L);
4 n=size(A,1)*size(A,2);
5 for i=1:1:size(A,1)
6 for j=1:1:size(A,2)
7 HIST(1,1+A(i,j))=HIST(1,1+A(i,j))+1;
8 endfor
9 endfor
Nota:
La sentencia de asignación necesita de la suma de una unidad para que no se
produzcan desbordamientos ya que el nivel 0 provocaría que la asignación se diera
sobre la componente (1,0) que no existe. Por ello añadimos al valor la unidad.
…..….
En el elemento (1,1) almacenaremos las veces que se
ha repetido el nivel de gris 0.
En el elemento (1,2) almacenaremos las veces que se
ha repetido el nivel de gris 1.
…..….
En el elemento (1,n + 1) almacenaremos las veces que se ha
repetido el nivel de gris n.
En el elemento (1,256) almacenaremos las veces que se ha
repetido el nivel de gris 255.
Figura 1.
Vector HIST()

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
3
Tenemos que el vector histograma donde HIST(1,k+1) es el número de píxeles
de la imagen con un nivel de gris k-ésimo, con k = 0,1,…,L − 1. Sin embargo, como el
histograma de una imagen es una distribución de probabilidad, nos falta dividir todas las
componentes del vector por el número total de píxeles. Este proceso lo hemos realizado
con el siguiente código:
10 for i=1:1:L
11 HIST(1,i)=HIST(1,i)/n;
12 endfor
Finalmente, cuando ya tenemos el histograma de la imagen lo "ploteamos"
usando la función bar() que lo representa mediante un diagrama de barras. Ahora
necesitamos crear un vector que se llame ACUM() donde almacenaremos la
probabilidad acumulada. Usando un for (para recorrer el vector) almacenamos en la
componente actual el valor correspondiente del histograma más lo acumulado con
anterioridad tal y como se puede observar en el código:
13 bar(HIST);
14 ACUM=zeros(1,L);
15 ACUM(1,1)=HIST(1,1);
16 for i=2:1:L
17 ACUM(1,i)=ACUM(1,i-1)+HIST(1,i);
18 endfor
A continuación, construiremos el vector de los valores normalizados con los
cuales trabajaremos en un futuro:
19 NORMALIZADO=zeros(1,L);
20 for i=1:1:L
21 NORMALIZADO(1,i)=(i-1)/(L-1);
22 endfor
+1 …..….
(1,1)
…..….
(1,2) (1,100) (1,256)
VECTOR HIST()
1 1 0 18 ··········
99 255 ··········
··········
·········
·········
·········
·········
……..
……..
Píxel actual
Incrementamos
la componente (1,1) que
es la correspondiente al
nivel 0
Componentes
Niveles de gris 0 1 99 255
Figura 2.

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
4
Hemos de tener presente que la componente (1,1) hace referencia al nivel cero
normalizado, por lo que hemos de restar 1: NORMALIZADO(1,i)=(i-1)/(L-1).
A continuación crearemos un vector con L = 256 componentes para almacenar
el nivel de gris ecualizado que le corresponde al nivel de gris de la imagen (por ejemplo,
al nivel 5 le corresponde el nivel ecualizado 10,…). También definimos dos variables:
mascerca: Será la variable que utilizaremos para determinar la probabilidad
acumulada que más se aproxima al valor normalizado. Se pone a 2 ya que lo más
alejados que pueden estar dos valores es 1 unidad.
nivel: Esta será la variable que informará el nivel para el cual mascerca sea
menor, es decir, detectaremos el nivel para el cual el valor acumulado se aproxima más
al valor normalizado.
FINAL=zeros(1,L);
mascerca=2;
nivel=0;
for i=1:1:L
for j=1:1:L
if abs(ACUM(1,i)-NORMALIZADO(1,j))<mascerca
mascerca=abs(ACUM(1,i)-NORMALIZADO(1,j));
nivel=j;
endif
endfor
FINAL(1,i)=nivel;
mascerca=2;
endfor
Con el for más restrictivo (el primero de ambos) nos situamos en un valor del
acumulador y con el segundo for vamos comparando el acumulador actual con los
distintos normalizados. A medida que encontremos un valor acumulado más próximo al
normalizado nos guardamos el nivel al que corresponde en la variable nivel.
Cuando haya recorrido todo el vector normalizado, en la variable nivel estará el
nivel para el cual el valor normalizado es el más próximo a la probabilidad acumulada.
Entonces, se almacena el nivel correspondiente en el histograma ecualizado y se pone a
2 mas cerca para repetir el proceso.
Finalmente creamos una matriz nueva donde vamos a almacenar la imagen
resultante de la ecualización mediante una escalera de estructuras de repetición. Al píxel
i,j de la nueva imagen le corresponde el nivel ecualizado. Es decir, al nivel de gris que
tiene la matriz original lo cambiamos por el nivel ecualizado y lo colocamos en la
matriz B.
36 B=zeros(size(A,1),size(A,2));
37 for i=1:1:size(A,1)
38 for j=1:1:size(A,2)
39 B(i,j)=FINAL(1,1+A(i,j));
40 endfor
41 endfor
42 imshow(B);

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
5
Finalmente "ploteamos" la imagen resultante.Resultados obtenidos:
Imagen original
Imagen ecuzlizada
Nota:
También podríamos haber utilizado otro método para la obtención de histograma
que permitía disminuir el número de operaciones dando así a nuestro programa una
mayor eficiencia:
Sea el histograma acumulado: ( ) ( )∑=
=i
k
khiH0
.
Si el histograma fuese totalmente plano, entonces el histograma acumulado para cada
nivel de gris sería:
( ) ( )256
1''NM
iiG +=
Idealmente queremos: ( ) ( )'iGiH = , luego ( ) ( )256
1'NM
iiH += .
Por tanto, ( )
−−= 1256
' iHNM
enterapartei

Prácticas de Física de la Visión Ejercicio 1 – Ecualización de histogramas
Jaime Martínez Verdú Mª Nieves Robles Botella
6
Me he tomado la libertad de integrar este ejemplo en el trabajo puesto que, a
diferencia de la imagen que se puso para estudiar, en este ejemplo se puede apreciar
mucho mejor el cambio y mejora que aporta la ecualización de histograma para el realza
de determinadas zonas de una imagen: Tal y como podemos observar, aparece una hoja
de la rosa que antes no podíamos apreciar. Podemos observar que se trata de una imagen
muy oscura (esto se puede observar que existe una banda estrecha por la zona de los
niveles de gris cercanos a cero).
Imagen original Histograma de la imagen original
Imagen ecualizada Histograma de la imagen ecualizada

Prácticas de Física de la Visión Ejercicio 2 – Binarización de imágenes
Jaime Martínez Verdú Mª Nieves Robles Botella
1
2. Binarización de imágenes.
Código:
1 function B=binarizacion(A,n) 2 3 for i=1:1:size(A,1) 4 for j=1:1:size(A,2) 5 if(A(i,j)<=n) 6 B(i,j)=0; 7 else 8 B(i,j)=255; 9 endif 10 endfor 11 endfor 12 imshow(B); 13 endfunction
Descripción del proceso de Binarización implementado:
Primeramente podemos decir que los argumentos de esta función son:
A: Matriz donde está almacenada la imagen.
n: Valor mediante el cual permitimos al usuario que elija el nivel para el cual
quiere binarizar.
El funcionamiento de esta función es muy sencillo: Implementaremos un mapa
de transición de umbralización. Mediante dos estructuras de repetición vamos
recorriendo la imagen por completo y en cada píxel imponemos una condición: Si el
nivel de gris del píxel actual es menor o igual al límite impuesto por el usuario, entonces
lo actualizamos a cero y, si no es así, lo actualizamos a 255.
n0
255
origen imagen la
de gris de Niveles
resultado imagen la
de gris de Niveles
Si el nivel del píxel
de la imagen está por
debajo de n entonces
se actualiza a 0
Si el nivel del píxel
de la imagen está por
debajo de n entonces
se actualiza a 255

Prácticas de Física de la Visión Ejercicio 2 – Binarización de imágenes
Jaime Martínez Verdú Mª Nieves Robles Botella
2
Resultados obtenidos:
Imagen original n = 50
n = 100 n = 150
n = 200

Prácticas de Física de la Visión Ejercicio 3 – Detección de Bordes
Jaime Martínez Verdú Mª Nieves Robles Botella
1
3. Detección de Bordes.
Código:
1 function deteccionbordes(A,n) 2 B=fft2(A); 3 imshow(log(abs(B))); 4 C=A; 5 [f c]=size(A); 6 for i=1:1:f 7 for j=1:1:c 8 if(mod(i+j,2)!=0) 9 C(i,j)=-1.*C(i,j); 10 endif 11 endfor 12 endfor 13 imshow(log(abs(fft2(C)))); 14 D=fft2(C); 15 for i=1:1:f 16 for j=1:1:c 17 if(sqrt((i-f/2)*(i-f/2)+(j-c/2)*(j-c/2))<n^2) 18 D(i,j)=0; 19 endif 20 endfor 21 endfor 22 imshow(D); 23 imshow(ifft2(D); 24 endfunction
Descripción del proceso de Detección de bordes implementado:
Primeramente podemos decir que los argumentos de esta función son:
A: Matriz donde está almacenada la imagen.
n: Valor mediante el cual elegimos el radio del círculo para eliminar las
frecuencias bajas.
Con la función fft2() conseguiremos aplicar la Transformada de Fourier a la
imagen almacenada en la matriz A. para poder ver la transformada en una imagen
tenemos que aplicar el mapa de transición logarítmico. Estas líneas están implementadas
con la intención de que nos demos cuenta que la transformada no aparece centrada en la
imagen. Para evitar que la imagen aparezca en las esquinas la centraremos. Para ellos
aplicaremos la propiedad de traslación.
( ) ( )
( ) ( ) ( ) ( )( )( ) ( )( )( )
( )( )( )
−−⇔−
−===⇒
−−⇔
+
+++++
++
++
++
2,
21,
1,,,,,
,,
222222
00
2
00
00
Nv
NuFyxf
yxfeyxfeyxfeyxfeyxf
vvuuFeyxf
yx
yxyxj
yxj
N
yN
xN
jN
yvxuj
N
yvxuj
ππππ
π

Prácticas de Física de la Visión Ejercicio 3 – Detección de Bordes
Jaime Martínez Verdú Mª Nieves Robles Botella
2
Así, el origen de la Transformada de Fourier de f(x,y) puede ser desplazado hasta
el centro de su correspondiente cuadrado de frecuencias N × N multiplicando f(x,y) sólo
por (-1)x+y
(es decir, negando píxeles de la imagen f(x,y) alternativamente).
Para ello, disponemos de dos bucles for una condición, si la posición es par,
entonces tendremos que multiplicar por – 1. De este modo, iremos multiplicando por
– 1 alternativamente. Si representamos ahora la transformada tenemos que la
transformada aparece centrada en la imagen.
Para eliminar los bordes hemos de anular las frecuencias bajas para quedarnos
con las altas. Por ello, los valores por fuera del círculo con radio n los anulamos.
Finalmente, representamos la Transformada de Fourier con las frecuencias bajas
eliminadas y representamos la Transformada Inversa de Fourier.
Resultados obtenidos:
Imagen original Umbralización 200
Resultado al eliminar bordes mediante Fourier

Trabajo optativo: Las monedas.
Implementa un programa capaz de imprimir por pantalla la suma de monedas que tenemos.
Para la solución a este enunciado hemos de decir que supondremos que tenemos un tapiz blanco donde depositaremos las monedas y una cámara fotográfica conectada a nuestro ordenador de modo que al realizar una foto del tapiz la fotografía pasa al ordenador transformada en forma de un archivo binario con la extensión “.txt”.
Tenemos que aclarar ciertos aspectos del enunciado que han de
cumplirse:
1. Únicamente se permitirá la utilización de monedas de curso legal y cyas dimensiones sean las normalizadas por el estado español. 2. El programa sólo estará preparado para la detección de monedas de 2 €, 1 €, 50 céntimos, 20 céntimos, 10 céntimos, 5 céntimos, 2 céntimos y un céntimo de euro. 3. Las monedas estarán separadas y ninguna podrá estar encima de otra moneda. 4. La cámara creará un archivo
al realizar la fotografía caracterizado por estar compuesto de unos y ceros de modo que la claridad será un cero y la opacidad con un uno.

1 #include <stdio.h> /*Librería para usar funciones E/S y para tratar fi cheros*/ 2 #include <stdlib.h> /*Librería para usar memoria dinámica*/ 3 #define nombre 100 /*La longitud máxima de la ruta*/ 4 #define rango 100 /*Número máximo de monedas que caben en el tapiz*/ 5 #define EURO_2 ??? /*Superficie de una moneda de 2 euros*/ 6 #define EURO_1 ??? /*Superficie de una moneda de 1 euro*/ 7 #define EURO_05 ??? /*Superficie de una moneda de 50 céntimos*/ 8 #define EURO_02 ??? /*Superficie de una moneda de 20 céntimos*/ 9 #define EURO_01 ??? /*Superficie de una moneda de 10 céntimos*/
10 #define EURO_005 ??? /*Superficie de una moneda de 5 céntimos*/ 11 #define EURO_002 ??? /*Superficie de una moneda de 2 céntimos*/ 12 #define EURO_001 ??? /*Superficie de una moneda de 1 céntimo*/ 13 14 /*Declaración de las funciones*/ 15 16 int ContarFilas( char * ); 17 int ContarColumnas( char * ); 18 void LeerMatriz( char **, char * , int , int ); 19 void BuscarMoneda( char **, int * , int , int ); 20 int TipoMoneda( int ); 21 double TotalMonedas( int * ); 22 23 /*Implementación de las funciones*/ 24 25 /*Programa para contar las columnas de la matriz*/ 26 int ContarColumnas( char * ch) 27 28 FILE* fichero; 29 int i; 30 char valor; 31 fichero=fopen(ch,"r"); /*Abrimos en modo de lectura*/ 32 33 /*Verificamos que no ha habido un error de apertur a del fichero*/ 34 35 if (fichero==NULL) 36 37 printf("Ha ocurrido un error al abrir el fiche ro.\n"); 38 exit(-1); 39 40 41 /*Con un bucle for comprobamos las columnas del fic hero*/ 42 43 for (i=1, valor=fgetc(fichero); valor!='\n';valor=fgetc (fichero)) 44 i=i+1; 45 46 fclose(fichero); /*Cerramos el fichero*/ 47 return (i); 48 49 /*Programa para contar las filas de la matriz*/ 50 int ContarFilas( char * ch) 51 52 FILE* fichero; 53 int i; 54 char valor; 55 fichero=fopen(ch,"r"); /*Abrimos en modo de lectura*/ 56 57 /*Verificamos que no ha habido un error de apertura del fichero*/ 58 59 if (fichero==NULL) 60 61 printf("Ha ocurrido un error al abrir el fiche ro.\n"); 62 exit(-1); 63 64 65 /*Con un bucle for comprobamos las filas del ficher o*/ 66 67 for (i=1, valor=fgetc(fichero); valor!=EOF;valor=fgetc( fichero)) 68

69 if (valor=='\n') 70 i=i+1; 71 72 73 fclose(fichero); /*Cerramos el fichero*/ 74 return (i); 75 76 77 /*Programa para ‘meter’ la foto en la matriz*/ 78 void LeerMatriz( char **mat, char * ch, int n, int m) 79 80 /* i ---> Servirá para recorrer la matriz por filas */ 81 /* j ---> Servirá para recorrer la matriz por colum nas */ 82 /*Sobra ---> No queremos en la matriz los caractere s \n y los obviamos*/ 83 84 FILE* fichero; 85 int i, j; 86 char sobra; 87 fichero=fopen(ch,"r"); /*Abrimos en modo de lectura*/ 88 89 /*Verificamos que no ha habido un error de apertura del fichero*/ 90 if (fichero==NULL) 91 92 printf("Ha ocurrido un error al abrir el fiche ro.\n"); 93 exit(-1); 94 95 for (i=0;i<n;i++) 96 97 for (j=0;j<m;j++) 98 mat[i][j]=fgetc(fichero); /*Se guarda el elemento*/ 99 sobra=fgetc(fichero);
100 101 return ; 102 103 104 /*Programa para buscar monedas e indicar su diámetr o*/ 105 void BuscarMoneda( char ** mat, int * s, int n, int m) 106 107 /* i ---> Servirá para recorrer la matriz por filas */ 108 /* j ---> Servirá para recorrer la matriz por colum nas */ 109 110 int i, j, k, z, l=0; 111 etiquetita_2: 112 for (i=0;i<n;i++) 113 114 for (j=0;j<m;j++) 115 116 if (mat[i][j]=='1') 117 118 for (k=0,z=0;mat[i][j+k]=='1';k++,z++) 119 mat[i][j+k]='0'; 120 etiquetita_1: 121 i++; 122 j=j+z/2; 123 for (;mat[i][j]==’1’;) 124 j--; 125 j++; 126 for (z=0;mat[i][j+z]==’1’;z++) 127 128 k++; 129 mat[i][j+z]=’0’; 130 131 if (mat[i+1][j+z/2]==’1’) 132 goto etiquetita_1; 133 else 134 135 if (k==1) 136 goto etiquetita_2;

137 else 138 139 s[l]=k; 140 l++; 141 goto etiquetita_2; 142 143 144 145 146 147 return ; 148 149 /*Programa que almacena en un vector las monedas en contradas*/ 150 double TotalMonedas( int * g) 151 152 int i; 153 double result; 154 for (i=0,result=0;g[i]!=NULL;i++) 155 156 if (g[i]<1.1*EURO_2&& g[i]>0.9*EURO_2) 157 result=result+2; 158 else if (g[i]<1.1*EURO_1&& g[i]>0.9*EURO_1) 159 result=result+1; 160 else if (g[i]<1.1*EURO_05&& g[i]>0.9*EURO_05) 161 result=result+0.5; 162 else if (g[i]<1.1*EURO_02&& g[i]>0.9*EURO_02) 163 result=result+0.2; 164 else if (g[i]<1.1*EURO_01&& g[i]>0.9*EURO_01) 165 result=result+0.1; 166 else if (g[i]<1.1*EURO_005&& g[i]>0.9*EURO_005) 167 result=result+0.05; 168 else if (g[i]<1.1*EURO_002&& g[i]>0.9*EURO_002) 169 result=result+0.02; 170 else if (g[i]<1.1*EURO_001&& g[i]>0.9*EURO_001) 171 result=result+0.01; 172 173 return (result); 174 175 void main ( void ) 176 177 178 int filas, columnas, k; 179 int *monedas; /*Cada comp. guardará el tipo de moneda encontrada* / 180 char **matriz; /*Matriz bidimens. dinámica donde almacenar la foto */ 181 char *ruta; /*Declaramos el puntero a carácter donde guardar la ruta*/ 182 183 /*Reservamos memoria para los nombres de las rutas* / 184 185 ruta=( char *)malloc(nombre*sizeof( char )); 186 printf("Introduzca la ruta: "); 187 gets(ruta); /*Almacenamos la ruta en la variable*/ 188 filas=ContarFilas(ruta); /*¿Cuantas filas debe tener nuestra matriz?*/ 189 columnas=ContarColumnas(ruta); /*Igualmente para las columnas*/ 190 191 /*Reserva de memoria para las matrices*/ 192 193 /*Primero reservamos memoria para las filas*/ 194 195 matriz=( char **)malloc(filas*sizeof( char *)); 196 197 /*Ahora reservamos memoria para las columnas*/ 198 199 for (k=0;k<filas;k++) 200 matriz[k]=( char *)malloc(columnas*sizeof( char )); 201 202 /*Almacenamos la foto en una matriz*/ 203 204 LeerMatriz(matriz, ruta, filas, columnas);

205 206 free(ruta); /*Liberamos la memoria de la variable ruta*/ 207 208 /*Ahora buscamos donde están las monedas*/ 209 210 monedas=( int *)malloc(rango*sizeof( int )); 211 BuscarMoneda(matriz, monedas, filas, columnas); 212 213 printf("\nEl total de monedas es de: %.2f.",TotalM onedas(monedas)); 214 215 //Liberamos la memoria 216 for (k=0;k<filas;k++) 217 free(matriz[k]); 218 free(matriz); 219 free(monedas); 220 return ; 221
Diagrama de los procesos que se ejecutan:
Problema: Debo encontrar método de búsqueda mejor
La cámara de fotos efectúa una fotografía y se
transmite al ordenador en forma de ceros y unos
Leemos la ruta del fichero
Contamos las filas y columnas que tiene el fichero
Almacenamos la foto en una matriz
Buscamos moneda a moneda y
determinamos sus respectivos diámetros
Se calcula la suma total