EXTRACCIÓN DEL ÁRBOL VASCULAR EN IMÁGENES 3D
71
EXTRACCIÓN DEL ÁRBOL VASCULAR EN IMÁGENES 3D Juan Francisco Carrillo Director: Marcela Hernández Hoyos Universidad de Los Andes Co-tutoria INSA, Lyon, Francia Co-director: Maciej Orkisz Agosto 1, 2006
Transcript of EXTRACCIÓN DEL ÁRBOL VASCULAR EN IMÁGENES 3D
EXTRACCIÓN DEL ÁRBOL VASCULAR EN IMÁGENES 3D
Juan Francisco Carrillo
Director: Marcela Hernández Hoyos
Universidad de Los Andes
Co-tutoria INSA, Lyon, Francia Co-director: Maciej Orkisz
Agosto 1, 2006

2
CONTENIDO
INTRODUCCIÓN....................................................................................................................... 4
CONTEXTO MEDICO...................................................................................................... 4 DESCRIPCIÓN DEL PROBLEMA.................................................................................... 6 CONTEXTO DEL TRABAJO DE TESIS............................................................................ 9 OBJETIVOS.................................................................................................................... 10 ORGANIZACION DEL DOCUMENTO........................................................................... 11
1. ESTRUCTURAS VASCULARES SEGM ENTATION: ESTADO DEL ARTE.................... 12
INTRODUCCIÓN ........................................................................................................... 12 1.1 SEGMENTACIÓN VASCULAR POR FILTRADO DIRECCIONAL MULTIESCALA. 13 1.2 ANÁLISIS DE MOMENTOS DE INERCIA................................................................ 17 1.3 SEGMENTACIÓN LOCAL ITERATIVA ................................................................... 17 1.4 MODELOS PARAMÉTRICOS................................................................................... 18 1.5 MANEJO DE LAS BIFURCACIONES ....................................................................... 18
2. MÉTODO ............................................................................................................................. 20
INTRODUCCIÓN ........................................................................................................... 20 2.1 ESTRUCTURA DEL ALGORITMO........................................................................... 22 2.2 PROCESAMIENTO DEL VOLUMEN DE INTERÉS.................................................. 26 2.3 METODO DE SEGMENTACION............................................................................... 29 2.4 PREDICCION DE CANDIDATOS............................................................................. 35 2.5 CORRECCIÓN DE CANDIDATOS............................................................................ 37
2.5.1 CORRECCIÓN DEL PUNTO...........................................................................................37 2.5.2 CORRECCIÓN DEL RADIO............................................................................................39
2.6 VALIDACIÓN DE CANDIDATOS............................................................................ 41 2.6.1 CONSTRUCCIÓN DEL MODELO....................................................................................41 2.6.2 COMPARACIÓN ...........................................................................................................42
2.7 REFINAMIENTO...................................................................................................... 43 2.8 ELIMINACIÓN DE LA PLACA................................................................................. 46
3. EVALUACIÓN ..................................................................................................................... 49
3.1 EXPERIMENTOS...................................................................................................... 49 3.2 RESULTADOS.......................................................................................................... 52
3
CONCLUSIONES Y DISCUSIÓN ........................................................................................... 67
TRABAJO A FUTURO Y PERSPECTIVAS........................................................................... 69
BIBLIOGRAFIA ....................................................................................................................... 70

4
INTRODUCCIÓN
CONTEXTO MEDICO Cada año, en el mundo mueren millones de personas debido a enfermedades cardiovasculares entre las cuales, la apoplejía es la tercera causa de muerte en los países desarrollados, y del 20% al 30% de los ataques de apoplejía ocurridos por primera vez son causados por arteriosclerosis de la carótida. Según la American Federation of Aging Research (Federación Americana de Investigación sobre el Envejecimiento) en EE.UU, cada 29 segundos alguien sufre una falla cardiovascular. EE.UU. destina entre US$20 mil millones y US$50 mil millones en tratamientos para enfermedades causadas por insuficiencia cardiaca, originada en obstrucciones coronarias. De acuerdo con estudios realizados por el Centre d’Epidémiologie sur les Causes Médicales de décès (CépiDc), parte del Institut National de la Santé et de la Recherche Médicale (INSERM), las enfermedades cardiovasculares fueron la primera causa de muerte en Francia en 1999, y las enfermedades de los vasos coronarios ocasionaron un tercio de esas muertes. La arteriosclerosis es la principal patología arterial. Es una enfermedad de evolución crónica, caracterizada por la formación de placas de tejido fibroso, elementos grasos y la adhesión de plaquetas al endotelio de las arterias. Existen muchos factores que influyen en la formación de la arteriosclerosis; entre otros, la alimentación, fumar, diabetes, presión arterial y la falta de actividad física. Sin embargo, todos ellos afectan al paciente en conjunto, y no explican por qué esta patología aparece en un vaso particular. Las consecuencias de la arteriosclerosis dependen de la ubicación y tamaño del vaso: comúnmente son la estenosis y los aneurismas. Se considera que la arteriosclerosis comienza cuando la túnica interna de las arterias se daña. La estenosis es un estrechamiento patológico, congénito o adquirido, debido a la formación de placa arteriosclerótica, la cual puede causar isquemia o infarto del tejido irrigado. Un aneurisma es una zona debilitada de un vaso sanguíneo, que se ensancha más allá del límite de sus paredes. Los aneurismas pueden romperse, causando hemorragias internas. Las placas que obstruyen el vaso van creciendo gradualmente hasta que la irrigación sanguínea del tejido se vuelve insuficiente. Esta obstrucción puede ser parcial o total.
5
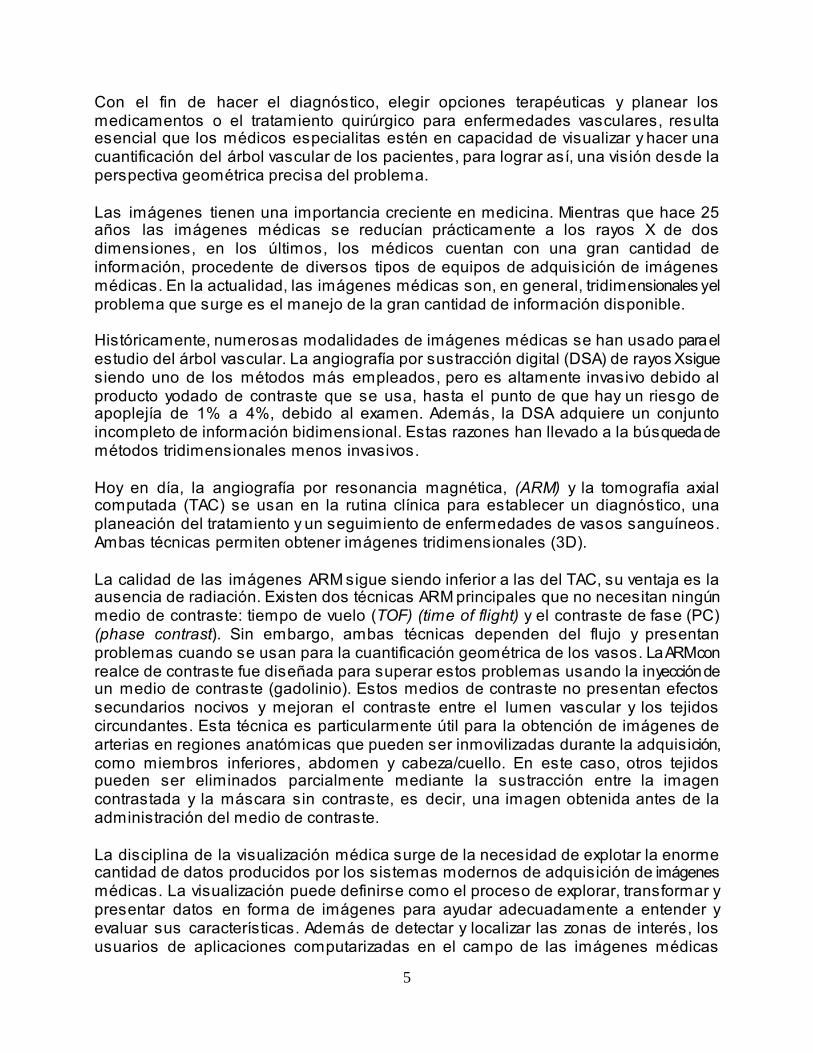
Con el fin de hacer el diagnóstico, elegir opciones terapéuticas y planear los medicamentos o el tratamiento quirúrgico para enfermedades vasculares, resulta esencial que los médicos especialitas estén en capacidad de visualizar y hacer una cuantificación del árbol vascular de los pacientes, para lograr así, una visión desde la perspectiva geométrica precisa del problema. Las imágenes tienen una importancia creciente en medicina. Mientras que hace 25 años las imágenes médicas se reducían prácticamente a los rayos X de dos dimensiones, en los últimos, los médicos cuentan con una gran cantidad de información, procedente de diversos tipos de equipos de adquisición de imágenes médicas. En la actualidad, las imágenes médicas son, en general, tridimensionales y el problema que surge es el manejo de la gran cantidad de información disponible. Históricamente, numerosas modalidades de imágenes médicas se han usado para el estudio del árbol vascular. La angiografía por sustracción digital (DSA) de rayos X sigue siendo uno de los métodos más empleados, pero es altamente invasivo debido al producto yodado de contraste que se usa, hasta el punto de que hay un riesgo de apoplejía de 1% a 4%, debido al examen. Además, la DSA adquiere un conjunto incompleto de información bidimensional. Estas razones han llevado a la búsqueda de métodos tridimensionales menos invasivos. Hoy en día, la angiografía por resonancia magnética, (ARM) y la tomografía axial computada (TAC) se usan en la rutina clínica para establecer un diagnóstico, una planeación del tratamiento y un seguimiento de enfermedades de vasos sanguíneos. Ambas técnicas permiten obtener imágenes tridimensionales (3D). La calidad de las imágenes ARM sigue siendo inferior a las del TAC, su ventaja es la ausencia de radiación. Existen dos técnicas ARM principales que no necesitan ningún medio de contraste: tiempo de vuelo (TOF) (time of flight) y el contraste de fase (PC) (phase contrast). Sin embargo, ambas técnicas dependen del flujo y presentan problemas cuando se usan para la cuantificación geométrica de los vasos. La ARM con realce de contraste fue diseñada para superar estos problemas usando la inyección de un medio de contraste (gadolinio). Estos medios de contraste no presentan efectos secundarios nocivos y mejoran el contraste entre el lumen vascular y los tejidos circundantes. Esta técnica es particularmente útil para la obtención de imágenes de arterias en regiones anatómicas que pueden ser inmovilizadas durante la adquisición, como miembros inferiores, abdomen y cabeza/cuello. En este caso, otros tejidos pueden ser eliminados parcialmente mediante la sustracción entre la imagen contrastada y la máscara sin contraste, es decir, una imagen obtenida antes de la administración del medio de contraste. La disciplina de la visualización médica surge de la necesidad de explotar la enorme cantidad de datos producidos por los sistemas modernos de adquisición de imágenes médicas. La visualización puede definirse como el proceso de explorar, transformar y presentar datos en forma de imágenes para ayudar adecuadamente a entender y evaluar sus características. Además de detectar y localizar las zonas de interés, los usuarios de aplicaciones computarizadas en el campo de las imágenes médicas
6
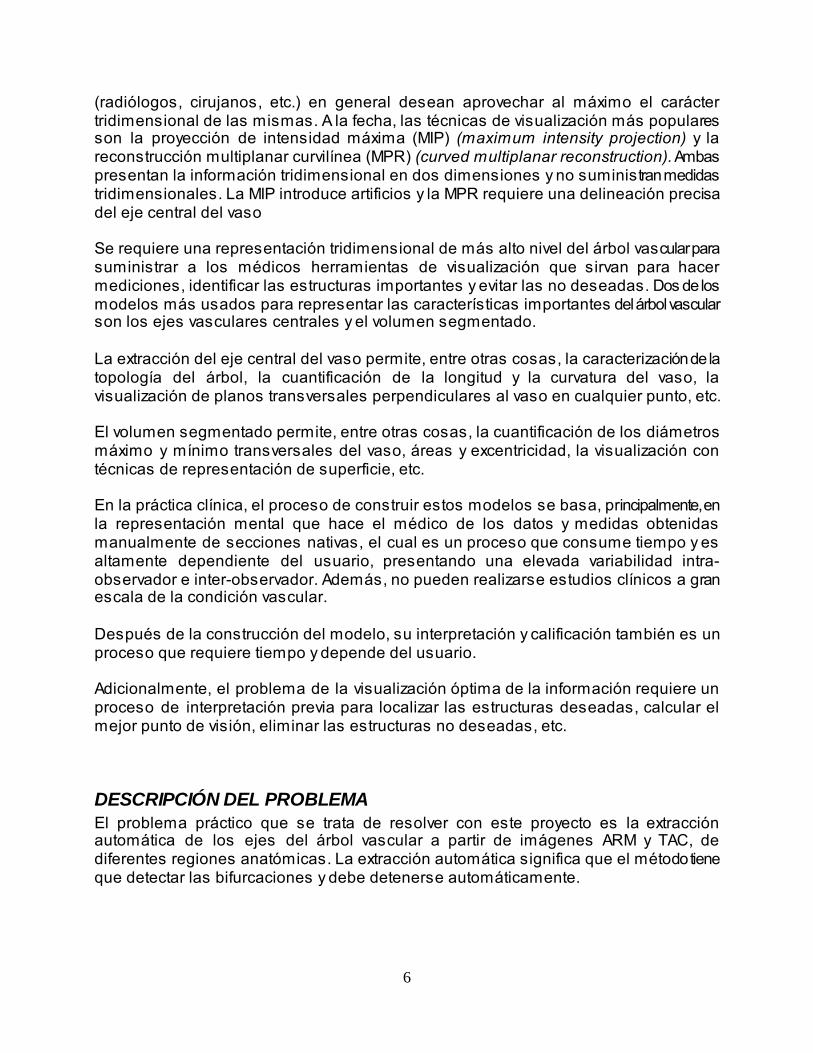
(radiólogos, cirujanos, etc.) en general desean aprovechar al máximo el carácter tridimensional de las mismas. A la fecha, las técnicas de visualización más populares son la proyección de intensidad máxima (MIP) (maximum intensity projection) y la reconstrucción multiplanar curvilínea (MPR) (curved multiplanar reconstruction). Ambas presentan la información tridimensional en dos dimensiones y no suministran medidas tridimensionales. La MIP introduce artificios y la MPR requiere una delineación precisa del eje central del vaso Se requiere una representación tridimensional de más alto nivel del árbol vascular para suministrar a los médicos herramientas de visualización que sirvan para hacer mediciones, identificar las estructuras importantes y evitar las no deseadas. Dos de los modelos más usados para representar las características importantes del árbol vascular son los ejes vasculares centrales y el volumen segmentado. La extracción del eje central del vaso permite, entre otras cosas, la caracterización de la topología del árbol, la cuantificación de la longitud y la curvatura del vaso, la visualización de planos transversales perpendiculares al vaso en cualquier punto, etc. El volumen segmentado permite, entre otras cosas, la cuantificación de los diámetros máximo y mínimo transversales del vaso, áreas y excentricidad, la visualización con técnicas de representación de superficie, etc. En la práctica clínica, el proceso de construir estos modelos se basa, principalmente, en la representación mental que hace el médico de los datos y medidas obtenidas manualmente de secciones nativas, el cual es un proceso que consume tiempo y es altamente dependiente del usuario, presentando una elevada variabilidad intra-observador e inter-observador. Además, no pueden realizarse estudios clínicos a gran escala de la condición vascular. Después de la construcción del modelo, su interpretación y calificación también es un proceso que requiere tiempo y depende del usuario. Adicionalmente, el problema de la visualización óptima de la información requiere un proceso de interpretación previa para localizar las estructuras deseadas, calcular el mejor punto de visión, eliminar las estructuras no deseadas, etc.
DESCRIPCIÓN DEL PROBLEMA El problema práctico que se trata de resolver con este proyecto es la extracción automática de los ejes del árbol vascular a partir de imágenes ARM y TAC, de diferentes regiones anatómicas. La extracción automática significa que el método tiene que detectar las bifurcaciones y debe detenerse automáticamente.
7
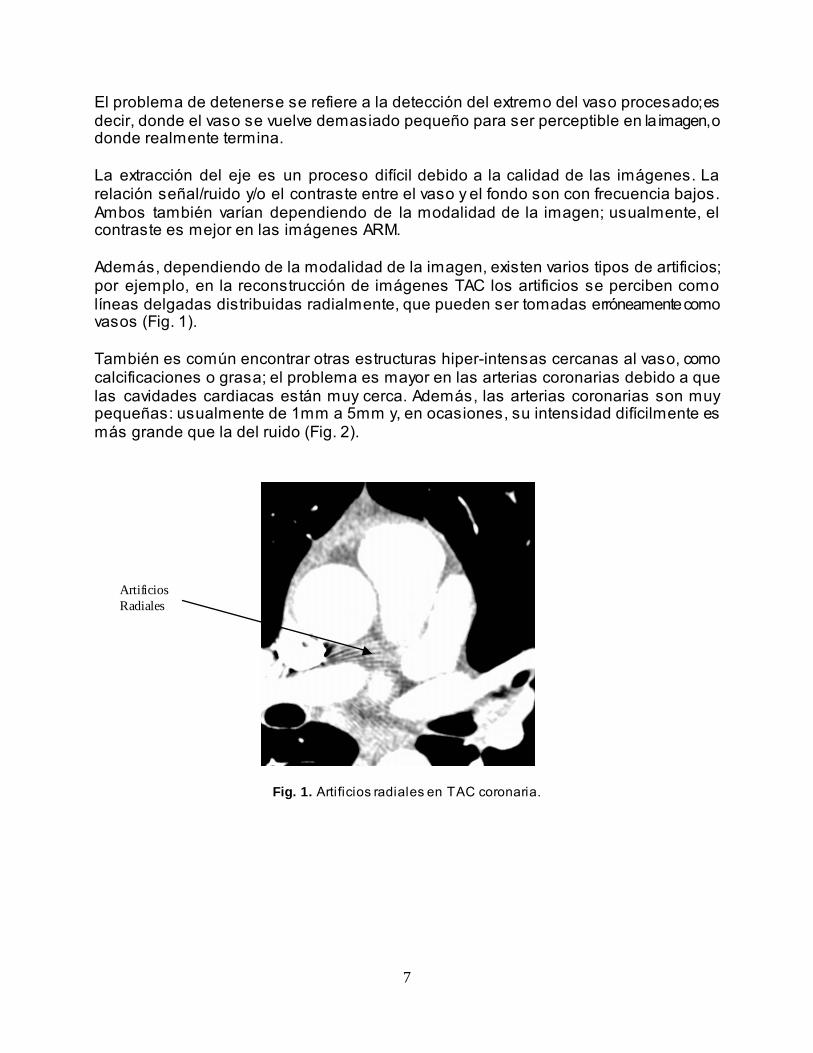
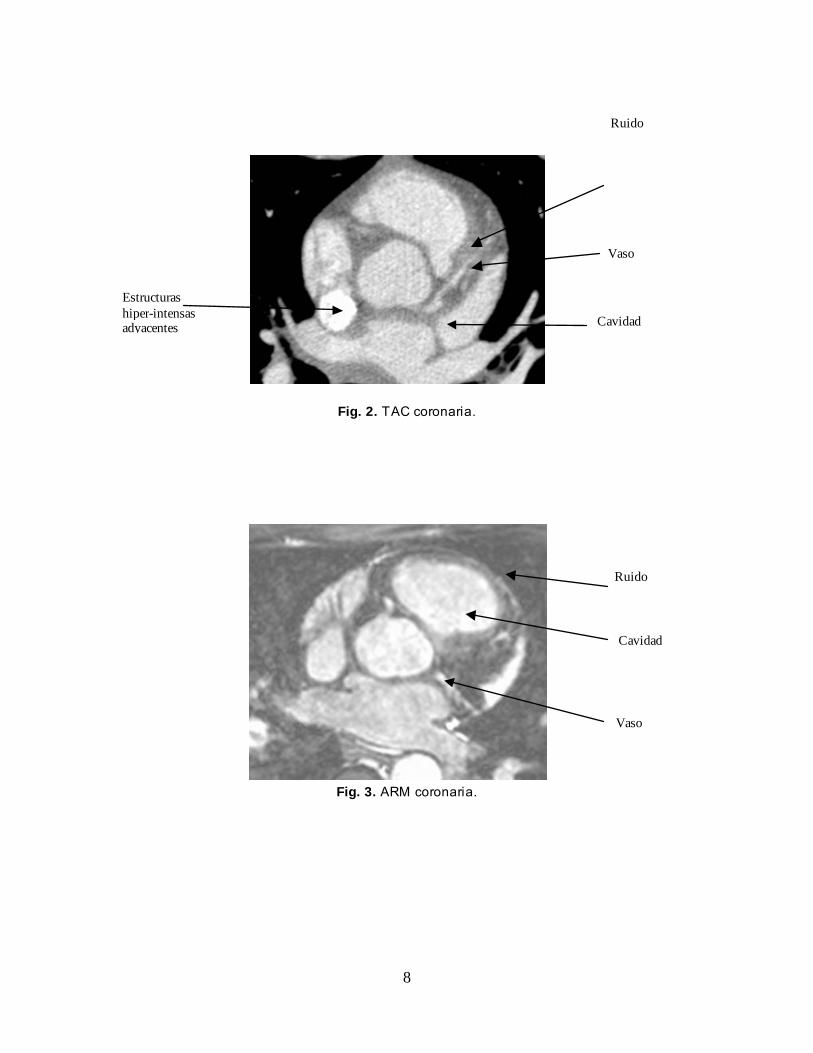
El problema de detenerse se refiere a la detección del extremo del vaso procesado; es decir, donde el vaso se vuelve demasiado pequeño para ser perceptible en la imagen, o donde realmente termina. La extracción del eje es un proceso difícil debido a la calidad de las imágenes. La relación señal/ruido y/o el contraste entre el vaso y el fondo son con frecuencia bajos. Ambos también varían dependiendo de la modalidad de la imagen; usualmente, el contraste es mejor en las imágenes ARM. Además, dependiendo de la modalidad de la imagen, existen varios tipos de artificios; por ejemplo, en la reconstrucción de imágenes TAC los artificios se perciben como líneas delgadas distribuidas radialmente, que pueden ser tomadas erróneamente como vasos (Fig. 1). También es común encontrar otras estructuras hiper-intensas cercanas al vaso, como calcificaciones o grasa; el problema es mayor en las arterias coronarias debido a que las cavidades cardiacas están muy cerca. Además, las arterias coronarias son muy pequeñas: usualmente de 1mm a 5mm y, en ocasiones, su intensidad difícilmente es más grande que la del ruido (Fig. 2).
Fig. 1. Artificios radiales en TAC coronaria.
Artificios Radiales
8
Fig. 2. TAC coronaria.
Fig. 3. ARM coronaria.
Cavidad
Estructuras hiper-intensas adyacentes
Vaso
Ruido
Cavidad
Vaso
Ruido
9
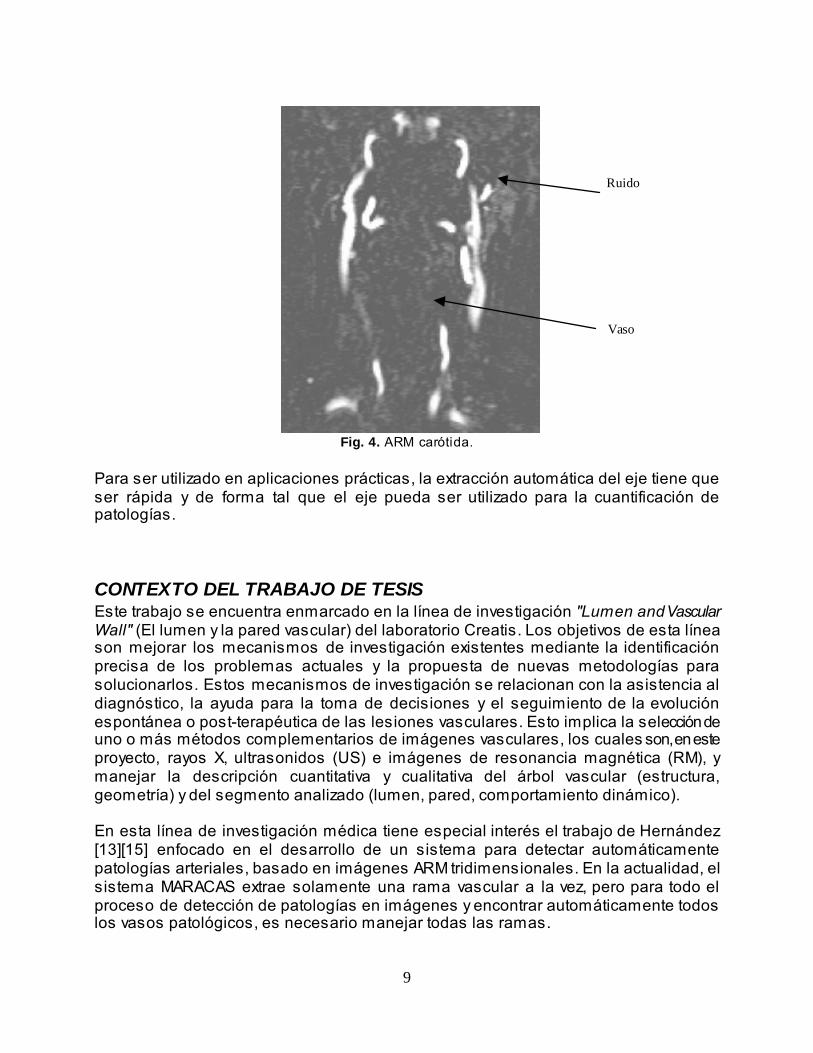
Fig. 4. ARM carótida. Para ser utilizado en aplicaciones prácticas, la extracción automática del eje tiene que ser rápida y de forma tal que el eje pueda ser utilizado para la cuantificación de patologías.
CONTEXTO DEL TRABAJO DE TESIS Este trabajo se encuentra enmarcado en la línea de investigación "Lumen and Vascular Wall" (El lumen y la pared vascular) del laboratorio Creatis. Los objetivos de esta línea son mejorar los mecanismos de investigación existentes mediante la identificación precisa de los problemas actuales y la propuesta de nuevas metodologías para solucionarlos. Estos mecanismos de investigación se relacionan con la asistencia al diagnóstico, la ayuda para la toma de decisiones y el seguimiento de la evolución espontánea o post-terapéutica de las lesiones vasculares. Esto implica la selección de uno o más métodos complementarios de imágenes vasculares, los cuales son, en este proyecto, rayos X, ultrasonidos (US) e imágenes de resonancia magnética (RM), y manejar la descripción cuantitativa y cualitativa del árbol vascular (estructura, geometría) y del segmento analizado (lumen, pared, comportamiento dinámico). En esta línea de investigación médica tiene especial interés el trabajo de Hernández [13][15] enfocado en el desarrollo de un sistema para detectar automáticamente patologías arteriales, basado en imágenes ARM tridimensionales. En la actualidad, el sistema MARACAS extrae solamente una rama vascular a la vez, pero para todo el proceso de detección de patologías en imágenes y encontrar automáticamente todos los vasos patológicos, es necesario manejar todas las ramas.
Vaso
Ruido
10
En el trabajo de su tesis doctoral en curso, Leonardo Flórez busca desarrollar un sistema para la cuantificación automática de estenosis en la arteria carótida, usando imágenes de diferentes modalidades que manejan la bifurcación carótida. También en esta línea de investigación médica, el trabajo DEA de Aïssa Arar ha demostrado que el ensanchamiento del vaso mediante filtrado direccional multiescala con derivadas gaussianas y el análisis de los valores propios de la matriz hessiana es adecuado para procesar previamente las imágenes antes de aplicar el sistema MARACAS a imágenes coronarias TAC, pero los tiempos de cálculo no son compatibles con la práctica médica diaria. Este trabajo también se encuentra enmarcado dentro del proyecto “Estudio de la hemodinámica a través de una estenosis de la bifurcación de la arteria carótida y su influencia en las observaciones clínicas” de la Universidad de los Andes y el Hospital Universitario San Ignacio, Bogotá. Los objetivos generales de este proyecto son: 1) desarrollar y usar herramientas conceptuales, computacionales, numéricas y experimentales novedosas que permitan entender con mayor claridad el fenómeno de la mecánica de fluidos y sólidos presente en la arteriosclerosis, 2) relacionar estos fenómenos con los síntomas observados en pacientes con estenosis en la bifurcación de la arteria carótida, usar el conocimiento generado para ayudar al diagnóstico y tratamiento de la estenosis de la arteria carótida.
OBJETIVOS El objetivo de este trabajo es desarrollar, implementar y evaluar un método de extracción del eje para usarlo en imágenes TAC y ARM de diferentes regiones anatómicas. El método desarrollado debe manejar las bifurcaciones y construir la representación del árbol vascular desde un solo punto inicial de la imagen seleccionado manualmente por el usuario. El eje extraído debe ser útil para construir un modelo geométrico que se va a usar en las simulaciones de flujo del “Estudio de la hemodinámica” en la Universidad de los Andes. Para este proyecto es especialmente importante incluir la bifurcación de la carótida en el modelo. Además, el método desarrollado debe ser combinado con el sistema MARACAS para realizar la detección semi-automática de patologías arteriales de todas las ramas del árbol vascular, presentes en una imagen. El método desarrollado también debe funcionar con las nuevas imágenes coronarias de diferentes modalidades. El eje extraído y el volumen segmentado deben ser útiles para implementar mejores técnicas de visualización del sistema vascular cardiaco; por ejemplo, la visualización del plano perpendicular del vaso o MIP selectiva, incluyendo solamente el área circundante de los vasos. Por ultimo, el método desarrollado tiene
11
que ser la base para el trabajo futuro relacionado con la detección automática de patologías arteriales en el corazón.
ORGANIZACION DEL DOCUMENTO Este documento está dividido en tres capítulos. El primero presenta un estado del arte de los métodos recientes más avanzados sobre extracción del eje y segmentación vascular. El segundo presenta el método desarrollado. El tercero presenta la metodología de evaluación del método y los resultados de la misma.
12
1. ESTRUCTURAS VASCULARES SEGMENTATION: ESTADO DEL
ARTE
INTRODUCCIÓN A continuación se presentan algunos de los métodos más representativos para la segmentación de estructuras vasculares a partir de imágenes medicas 3D. La segmentación de la imagen es la tarea de dividir esta última en regiones mutuamente excluyentes, de tal manera que todos los voxeles en una región tengan las mismas características. La segmentación vascular es la separación de estructuras vasculares de las demás estructuras presentes en la imagen. Esta segmentación no es una tarea difícil, razón por la cual las técnicas de segmentación genérica tienen que ser adaptadas para manejar las características geométricas de los vasos (delgados, formas ramificadas y tortuosas de diferentes tamaños) y características fotométricas (perfiles de intensidad, contraste, relación señal/ruido, …). El conocimiento previo de algunas de las características esperadas se usa para mejorar el proceso de segmentación. La característica geométrica más usada es el hecho de que la mayoría de las estructuras vasculares tiene forma tubular pero este supuesto dificulta manejar las bifurcaciones. Se usan otras características de los vasos como, por ejemplo: 1) el hecho de que el sistema vascular sea siempre una pequeña porción del volumen total de la imagen y para segmentarla no hay necesidad de procesar toda la imagen, de modo que se puede usar un enfoque local en lugar de uno global; 2) el hecho de que el tamaño de los vasos cambia a lo largo de su recorrido tiene que tomarse en cuenta, de modo que pueden usarse enfoques multiescala; 3) el hecho de que la dirección del vaso no cambia abruptamente. Estas características geométricas y fotométricas también se usan indirectamente en el análisis de distribución de la intensidad de la imagen. Este se implementa como el calculo de las derivadas de la imagen o el estudio de los momentos de masa de la imagen. Básicamente, se usan hasta los momentos de masa o las derivadas de segundo orden debido a la complejidad del análisis de orden mayor, pero esto representa pérdida de información y, a veces, la información adquirida no es suficiente para modelar todas las características del vaso, por ejemplo, las bifurcaciones y el cambio de la forma transversal. El resultado del proceso de segmentación es una representación de alto nivel del vaso, que puede ser el eje o el volumen segmentado. Este último también se puede representar como la superficie del volumen o el volumen mismo.
13
Si la meta del proceso de segmentación es el eje del vaso, puede extraerse directamente en la imagen o puede usarse un método indirecto para calcularlo a partir del volumen segmentado. Además, si la meta es extraer el volumen segmentado, puede calcularse directamente de la imagen o se puede extraer primero el eje del vaso y luego usarlo para iniciar el cálculo. Las imágenes se pueden procesar antes de la segmentación para mejorar algunas de sus características; por ejemplo reducción de ruido, falta de claridad, artificios o de otras estructuras, contraste o ampliación del vaso, etc. Estos procesos de pre-segmentación están implementados típicamente como filtros y como resultado brindan otra imagen. Normalmente, los filtros por si solos no pueden realizar la tarea de segmentación porque la representación del vaso de mas alto nivel que se busca, no puede ser una imagen. Estos filtros también pueden usar todas las características geométricas y fotométricas conocidas, descritas anteriormente. Los métodos que se van a presentar a continuación pueden clasificarse por las características geométricas y fotométricas que usan, por la estructura del algoritmo (iterativo o no), o por su objetivo (eje o volumen del vaso). En este documento se decidió clasificarlos por el principio matemático que utilizan, debido a que cada método utiliza una combinación de características geométricas y fotométricas conocidas y, en ocasiones emplean subprocesos iterativos y no iterativos, y logran ambas metas: extracción del eje y segmentación del volumen, al mismo tiempo.
1.1 SEGMENTACIÓN VASCULAR POR FILTRADO DIRECCIONAL MULTIESCALA El objetivo de este tipo de métodos es pre-filtrar la imagen, realzar las estructuras similares a vasos y reducir las demás. Casi todos estos métodos se basan en el análisis de la matriz hessiana calculada en cada voxel y a diferentes escalas. La matriz hessiana se define como:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
)()()()()()()()()(
)(xxxxxxxxx
xH
zzzyzx
yzyyyx
xzxyxx
HHHHHHHHH
(1)
donde
)(xuvH es la derivada parcial de )(xf calculada en x. En nuestro caso, )(xf representa la función de la intensidad de la imagen.

14
Usualmente, las derivadas parciales se calculan mediante la convolución de la imagen con una derivada gaussiana. Esto ayuda a reducir la sensibilidad al ruido que presentan todos los filtros derivativos y también permite introducir el factor de escala σ .
)(),(
)(2
xx
x fvu
GH uv ∗
∂∂∂
=σ
σ (2)
donde 2
22
2
21),( σ
πσσ
x
exG−
= (3)
es el núcleo (kernel) gaussiano y σ ² es su varianza. Teniendo los valores propios 321 λλλ ≤≤ es posible detectar estructuras tubulares en la imagen. De hecho, la orientación local de las estructuras tubulares puede encontrarse en la dirección en la cual el cambio en la intensidad de la imagen es mínimo, lo que significa que la segunda derivada en esa dirección también es mínima. Las derivadas en las otras dos direcciones son muy similares porque las secciones transversales de las estructuras tubulares son aproximadamente circulares. En general, pueden identificarse varias estructuras diferentes analizando los valores propios de la matriz hessiana.
λ1 λ 2 λ 3 Estructura/Orientación Baja Baja Baja Ruido, sin orientación Baja Baja Alta- Estructura plana brillante Baja Baja Alta + Estructura plana oscura Baja Alta - Alta - Estructura tubular brillante Baja Alta + Alta + Estructura tubular oscura Alta - Alta - Alta - Estructura esférica brillante Alta + Alta + Alta + Estructura esférica oscura
Tabla 1. Características identificadas analizando los valores propios de la matriz hessiana. Usando estas características se han definido diferentes formulas para definir criterios de cilindricidad (vesselness). Frangi [7] define una función para el criterio de cilindricidad
),( σν x como:
15
⎪⎩
⎪⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟
⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−
>>
= contrariolodecSRR
osix BA __
2exp1
2exp
2exp1
0__00),(
2
2
2
2
2
232
βα
λλσν
(4) donde
3
2
λλ
=AR (5)
como podemos ver 1→AR cuando 23 λλ ≈ como se esperaba
32
1
λλλ
=BR (6)
como podemos ver, 1→BR cuando 321 λλλ ≈<< como se esperaba
∑=j
jS 2λ (7)
S es la norma Frobenius de la matriz hessiana que permite eliminar el fondo de la imagen sin la estructura. α, β y c controlan la sensibilidad del filtro. Una vez que se calculado el criterio de cilindricidad, para todos los voxeles a diferentes escalas, usualmente se escoge la respuesta máxima entre todas las escalas. El resultado se puede usar para extraer el eje del vaso en muchas formas diferentes. Descoteaux [3] usa la definición del criterio de cilindricidad de Frangi. Entonces, los valores propios en la escala seleccionada se usan para estimar el radio del vaso y los vectores propios para estimar su orientación en cada punto. Los valores para el criterio de cilindricidad, el radio estimado y las direcciones estimadas se usan para construir un campo vectorial con magnitud alta en las fronteras del vaso, y ortogonal a la misma frontera. Entonces, se aplica la maximización de flujo geométrico de Vasilevskyi [14], para encontrar la superficie del vaso. Wink en [8] y [10] usa la definición para el criterio de cilindricidad de Lorenz:

16
⎩⎨⎧
+>>
=contrariolode
osix
__0__00
),(32
32
λλλλ
σν (8)
también se toma el máximo de la respuesta del filtro a diferentes escalas. El eje se determina usando un enfoque de trayectoria a un costo mínimo. En este enfoque, la imagen se trata como una rejilla de nodos donde cada voxel está conectado a sus vecinos. La función del costo de viajar de un voxel a a otro voxel b es el inverso de la salida del filtro del criterio de cilindricidad en el voxel b. El algoritmo de Dijkstra se usa para encontrar la trayectoria entre dos puntos seleccionados por el usuario. En [9], Wink usa otra definición para el criterio de cilindricidad:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ +−−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛
−
>
= contrariolodec
si
x __2
)(exp1
2exp
00
),(2
22
21
2
2
2
1
2
λλβ
λλ
λ
σν (9)
Sin embargo, en lugar de tomar el máximo de la respuesta del filtro a escalas diferentes, la escala del filtro se usa como otra dimensión en el espacio de búsqueda y los cambios de escala se penalizan mediante el incremento de la función de costo. Gratama [5] usa una teoría hessiana modificada, en lugar de las derivadas gaussianas se usan filtros de Canny con diferentes escalas porque son más sensibles ante las estructuras alargadas que las derivadas gaussianas. La información de los valores propios y los vectores propios se usa para construir una función de costo. Finalmente, el camino de costo mínimo se calcula entre dos puntos seleccionados por el usuario con una implementación de un algoritmo de camino de costo mínimo de Dijkstra. La técnica propuesta por Florin [4] está especialmente desarrollada para la extracción de arterias coronarias. Primero, el volumen del corazón se segmenta y luego se construye un modelo elipsoidal del mismo usando el resultado de la segmentación. Para cada punto de esta elipsoide, se usa un algoritmo de ray-casting (lanzamiento de rayos) para medir las intensidades normales a su superficie. El análisis de la matriz hessiana con un criterio del criterio de cilindricidad de Frangi modificada, se emplea para resaltar los vasos en las intensidades analizadas. Los ejes de los vasos se extraen mediante interpolación de puntos entre puntos extraídos.
17
1.2 ANÁLISIS DE MOMENTOS DE INERCIA El análisis de momentos de la imagen se puede usar en lugar del análisis de las derivadas segundas de la imagen. En este enfoque, la intensidad de la imagen se interpreta como una función de la densidad de masa. Los momentos de orden n de la imagen se definen de la siguiente manera:
∑∑∑= ),,( zyxfzyxI rqpzyx rqp (10)
en donde n=p+q+r (11)
La matriz de inercia se define como:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΙΙΙΙΙΙΙΙΙ
=Ι)()()()()()()()()(
)(xxxxxxxxx
x
zzzyzx
yzyyyx
xzxyxx
(12)
Teniendo los valores propios 321 λλλ ≤≤ varias estructuras diferentes, pueden identificarse de forma similar al análisis realizado sobre la matriz hessiana.
Estructura
321 λλλ ≈≈ Estructura esférica
321 0 λλλ ≈<<≈ Estructura tubular
321 0 λλλ <<≈≈ Estructura plana
Tabla 2. Características identificadas analizando los valores propios de la matriz de inercia
Hernández en [15] presenta un método de extracción del eje en el cual el usuario selecciona manualmente un punto de partida, luego se estiman puntos consecutivos del eje con base en el centro de gravedad y la orientación local de los contenidos de una célula esférica definida alrededor de la posición actual. El centro de gravedad y la orientación local se calculan con base en los momentos de la imagen.
1.3 SEGMENTACIÓN LOCAL ITERATIVA En estos métodos, el eje del vaso se determina localmente mediante la esqueletización de un volumen segmentado localmente. La segmentación se realiza en un volumen de interés (VOI) definido alrededor de un punto del eje predicho. La predicción del punto de ejes se basa en la información topológica que resulta del proceso de esqueletización.

18
En Manniesing [6], el proceso se inicia con un punto seleccionado por el usuario. Un VOI simétrico se define alrededor de cada punto analizado. El tamaño del VOI permanece sin cambiar a través de todo el proceso. El VOI es segmentado con el método de Level Sets usando una función de velocidad basada en el histograma del VOI. En cada paso, el volumen segmentado localmente se agrega al volumen global, luego, se extrae el esqueleto del volumen global local y los puntos extremos de este esqueleto se usan, entonces, como puntos predichos.
1.4 MODELOS PARAMÉTRICOS En este enfoque, las características de los objetos esperados son modeladas en forma paramétrica. Por ejemplo, si el vaso es modelado como una unión de cilindros, los parámetros podrían ser los diámetros de los cilindros. El objetivo final de estos algoritmos es encontrar los valores de todos los parámetros que mejor se ajustan a la imagen. La diferencia entre el objeto modelado con los parámetros pi, y la imagen f(x) se cuantifica mediante una función objetivo E(pi, f(x)) y puede minimizarse mediante un método de optimización apropiado. Worz en [12] modela el perfil de intensidad de la sección transversal del vaso como un disco binario centrado en x y con radio R convolucionado con un filtro gaussiano de tamaño �. El método comienza en un punto definido por el usuario. En cada punto, los parámetros del cilindro son determinados minimizando el cuadrado de la diferencia entre las intensidades de las imágenes f(x) dentro del volumen de interés y las intensidades del modelo.
( )( )2)(,,∑ −VOI
xfRxilindroModelodelc σ (13)
En cada punto, los parámetros iniciales para la minimización se calculan a partir de los parámetros del segmento anterior, usando un filtro lineal Kalman.
1.5 MANEJO DE LAS BIFURCACIONES Todos los métodos descritos hasta ahora no manejan bifurcaciones sino que extraen una rama del árbol vascular a la vez. En los métodos que se van a presentar a continuación, es necesario segmentar localmente o globalmente el volumen del vaso. En [1] Flasque presenta un método iterativo de extracción del eje, en el cual los puntos consecutivos del eje se estiman con base en los momentos de la imagen calculados en un VOI de forma de paralelepípedo alrededor del punto actualmente analizado. La detección de la bifurcación se basa en el análisis de los componentes conexos en el volumen y en la superficie del paralelepípedo.
19
El número de los componentes conexos en el volumen NV se toma como el número de vasos dentro del paralelepípedo; el supuesto que se hace es que no hay ninguna otra estructura diferente a los vasos dentro del paralelepípedo. El número de componentes NS conexos en la superficie se toma como el número de vasos que entran o salen del paralelepípedo. Se hace el mismo supuesto. Si hay un vaso dentro del paralelepípedo sin bifurcaciones, entonces NV=1 y NS=2. Si hay un vaso dentro del paralelepípedo con una bifurcación, entonces NV=1 y NS=3; para cada combinación de vasos y bifurcaciones se espera que exista un NV y un NS. La siguiente tabla muestra los casos más representativos.
1 vaso sin bifurcaciones
NV=1 NS=2
2 vasos sin bifurcaciones
NV=2 NS=4
3 vasos sin bifurcaciones
NV=3 NS=6
1 vaso con 1 bifurcación
NV=1 NS=3
1 vaso con 1 bifurcación y 1 vaso sin bifurcaciones
NV=2 NS=5
Tabla 3. Casos representativos en el análisis de componentes conexos en el volumen y en la superficie. En [19] Antiga presenta un método para la esqueletización de estructuras tubulares segmentadas previamente. En este método, cada punto consecutivo del eje se calcula como el baricentro del perfil de la intersección de la superficie del volumen segmentado y una superficie esférica centrada en el punto anterior. Como todos los segmentos del perfil de la intersección no tienen la misma longitud, su contribución al cálculo del baricentro se pondera por su longitud. El radio de la esfera siguiente se calcula al mismo tiempo cuando se predice el punto y es igual a la distancia desde el punto predicho hasta el segmento del perfil más distante, multiplicado por una constante k=1.05. Cuando existe una bifurcación, el método detecta dos perfiles de intersección diferentes en la superficie de la esfera y se predicen dos puntos diferentes. Con este método puede encontrarse el punto real de la bifurcación, mientras que con el método de Flasque la bifurcación se detecta, pero el punto de la bifurcación tiene que estimarse posteriormente.
20
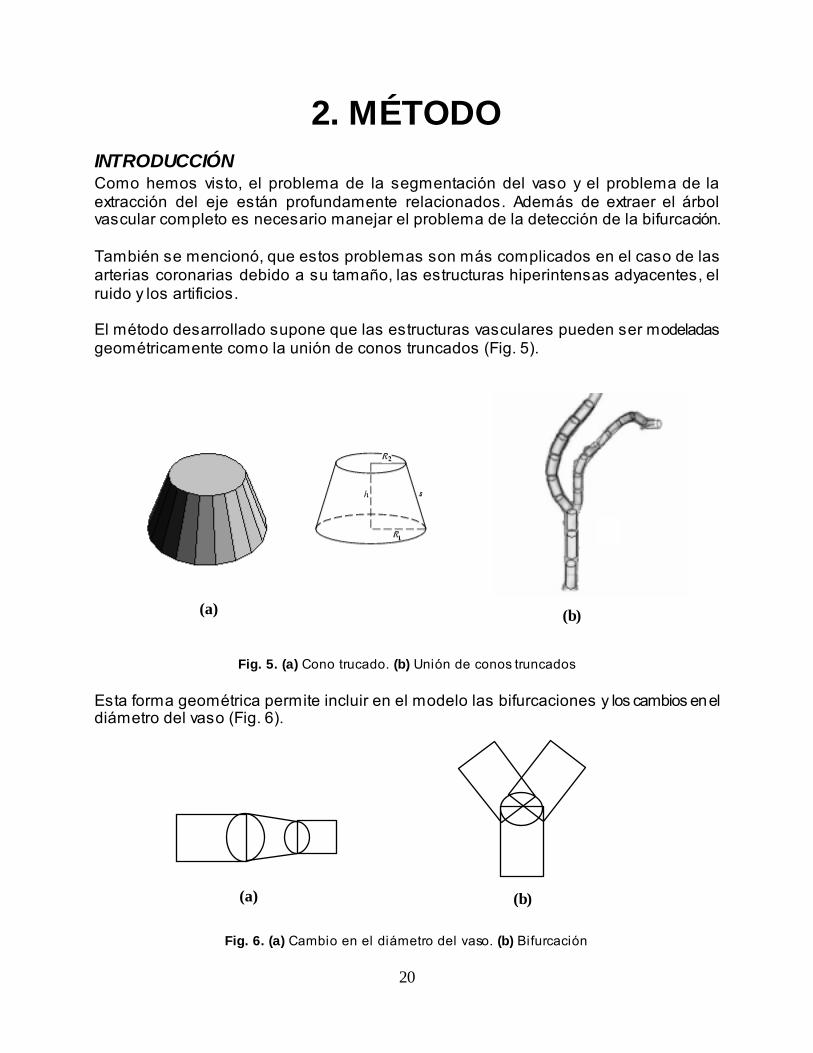
2. MÉTODO INTRODUCCIÓN Como hemos visto, el problema de la segmentación del vaso y el problema de la extracción del eje están profundamente relacionados. Además de extraer el árbol vascular completo es necesario manejar el problema de la detección de la bifurcación. También se mencionó, que estos problemas son más complicados en el caso de las arterias coronarias debido a su tamaño, las estructuras hiperintensas adyacentes, el ruido y los artificios. El método desarrollado supone que las estructuras vasculares pueden ser modeladas geométricamente como la unión de conos truncados (Fig. 5).
Fig. 5. (a) Cono trucado. (b) Unión de conos truncados Esta forma geométrica permite incluir en el modelo las bifurcaciones y los cambios en el diámetro del vaso (Fig. 6).
Fig. 6. (a) Cambio en el diámetro del vaso. (b) Bifurcación
(a) (b)
(a) (b)

21
Este modelo permite una buena representación de los vasos, incluso cuando la sección transversal del vaso no es circular. Para modelar el eje del vaso, usamos la definición conocida en morfología matemática: el eje medio. El eje medio es la unión de los centros de las esferas con radios máximos, que pueden ser incluidas totalmente en el volumen (Fig. 7).
Fig. 7. En rojo, definición del eje. En azul, frontera del vaso.
. Esta definición se usa en vez del centro de gravedad de la sección transversal para evitar los casos en los cuales el centro de gravedad está situado fuera del borde frontera del vaso o demasiado cerca de el; por ejemplo en los vasos con patologías (Fig. 8). Fig. 8. En rojo definición del punto del eje con el radio máximo de la esfera. En azul el centro de gravedad
está ubicado fuera de la frontera.

22
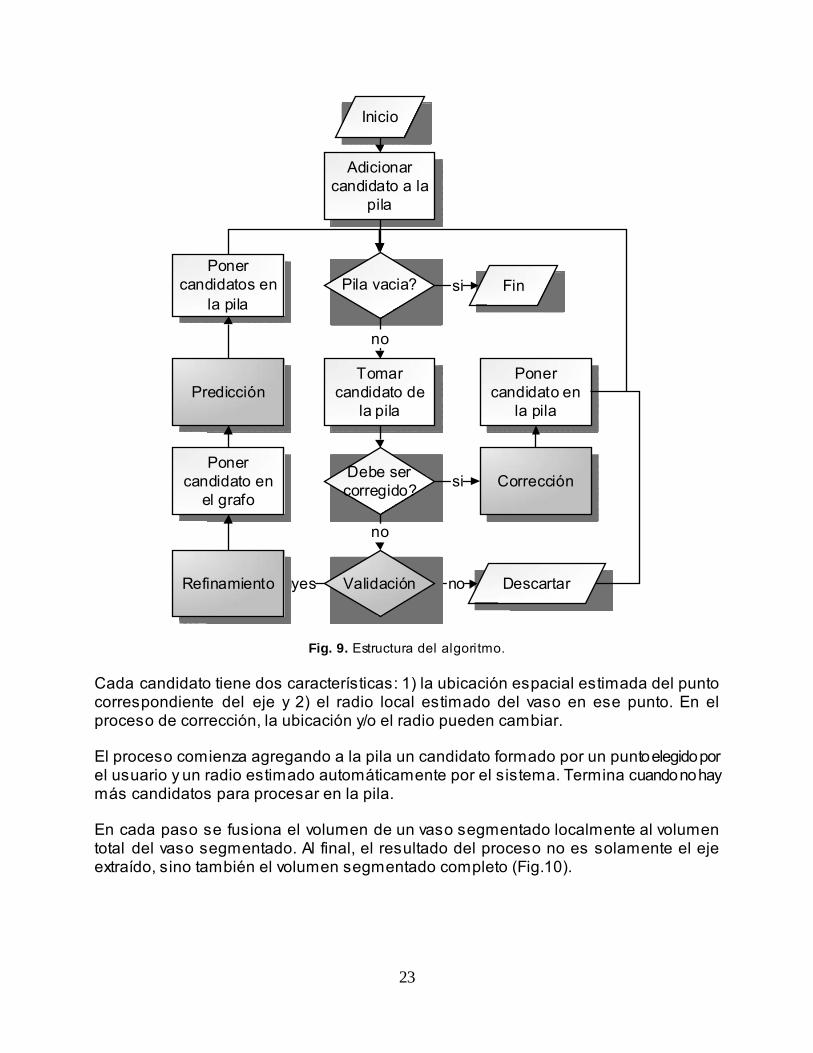
2.1 ESTRUCTURA DEL ALGORITMO La extracción del eje es un proceso iterativo que trabaja sobre una pila de candidatos. A continuación se explica la manera en que se agregan y retiran los candidatos de la pila y cómo se construye el grafo del árbol vascular. En el numeral 2.2, se explicará cómo se procesa la imagen para cada candidato. Para cada candidato se define un volumen de intereses (VOI) como una esfera centrada en el punto predicho en el candidato, al interior de la cual se llevaran a cabo todo el procesamiento local. Dado un candidato tomado de la pila, el método determina si es necesario corregirlo. Si es el caso, se corrige y se regresa a la pila. Si el candidato no necesita ser corregido, se verifica la validez del criterio de cilindricidad en ese punto. Si no cumple con del criterio de cilindricidad, se descarta. En caso contrario, se agrega al grafo que representa el eje de árbol vascular. Luego, se predicen varios candidatos y se regresan a la pila para ser procesados más adelante (Fig.9).
23
Inicio
Adicionar candidato a la
pila
Pila vacia?
Descartarno
Poner candidato en
la pila
Poner candidatos en
la pila
Predicción
Poner candidato en
el grafoCorrección
Tomar candidato de
la pila
Fin
Debe ser corregido?
Validación
si
no
yes
si
no
Refinamiento
Fig. 9. Estructura del algoritmo. Cada candidato tiene dos características: 1) la ubicación espacial estimada del punto correspondiente del eje y 2) el radio local estimado del vaso en ese punto. En el proceso de corrección, la ubicación y/o el radio pueden cambiar. El proceso comienza agregando a la pila un candidato formado por un punto elegido por el usuario y un radio estimado automáticamente por el sistema. Termina cuando no hay más candidatos para procesar en la pila. En cada paso se fusiona el volumen de un vaso segmentado localmente al volumen total del vaso segmentado. Al final, el resultado del proceso no es solamente el eje extraído, sino también el volumen segmentado completo (Fig.10).
24
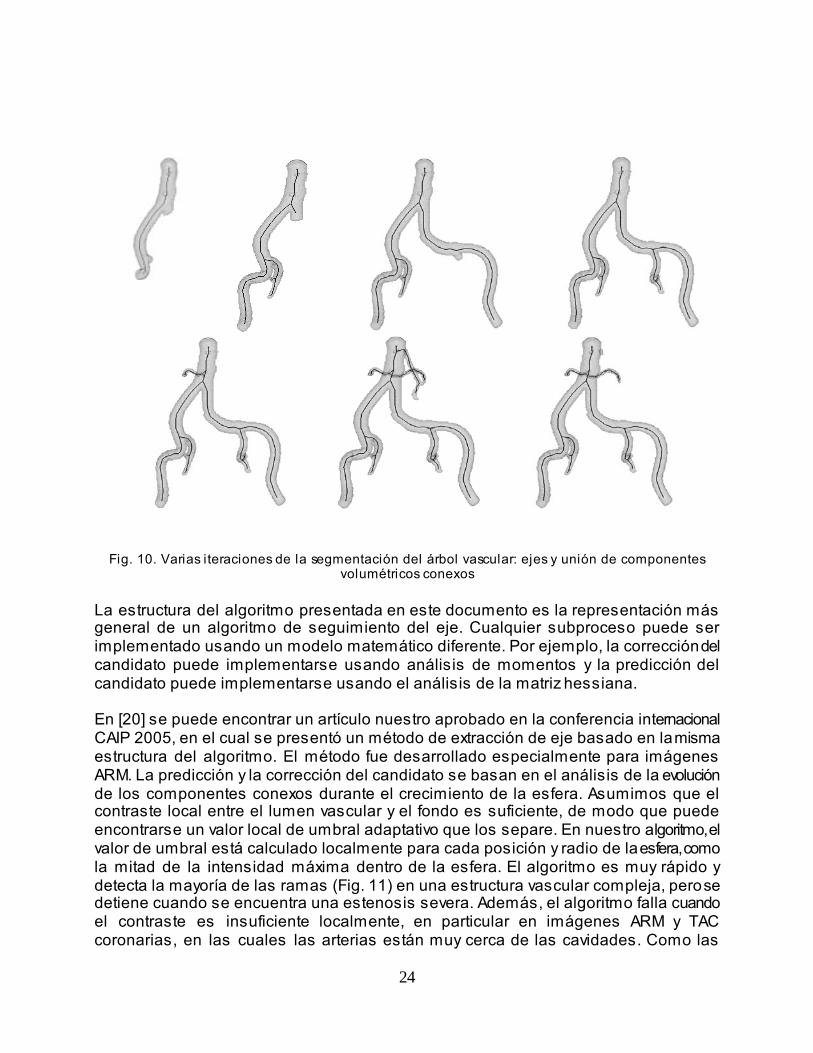
Fig. 10. Varias iteraciones de la segmentación del árbol vascular: ejes y unión de componentes volumétricos conexos
La estructura del algoritmo presentada en este documento es la representación más general de un algoritmo de seguimiento del eje. Cualquier subproceso puede ser implementado usando un modelo matemático diferente. Por ejemplo, la corrección del candidato puede implementarse usando análisis de momentos y la predicción del candidato puede implementarse usando el análisis de la matriz hessiana. En [20] se puede encontrar un artículo nuestro aprobado en la conferencia internacional CAIP 2005, en el cual se presentó un método de extracción de eje basado en la misma estructura del algoritmo. El método fue desarrollado especialmente para imágenes ARM. La predicción y la corrección del candidato se basan en el análisis de la evolución de los componentes conexos durante el crecimiento de la esfera. Asumimos que el contraste local entre el lumen vascular y el fondo es suficiente, de modo que puede encontrarse un valor local de umbral adaptativo que los separe. En nuestro algoritmo, el valor de umbral está calculado localmente para cada posición y radio de la esfera, como la mitad de la intensidad máxima dentro de la esfera. El algoritmo es muy rápido y detecta la mayoría de las ramas (Fig. 11) en una estructura vascular compleja, pero se detiene cuando se encuentra una estenosis severa. Además, el algoritmo falla cuando el contraste es insuficiente localmente, en particular en imágenes ARM y TAC coronarias, en las cuales las arterias están muy cerca de las cavidades. Como las

25
cavidades también están llenas con el medio de contraste, las intensidades son muy similares.
Fig. 11. Ejemplos de resultados obtenidos con el algoritmo descrito en [20]: (izquierda) arterias segmentadas que usan un umbral igual a la mitad de la intensidad global máxima; (derecha) unión de componentes conexos extraídos usando un umbral local igual a la mitad de la intensidad máxima dentro
de una esfera adaptativa móvil.
26
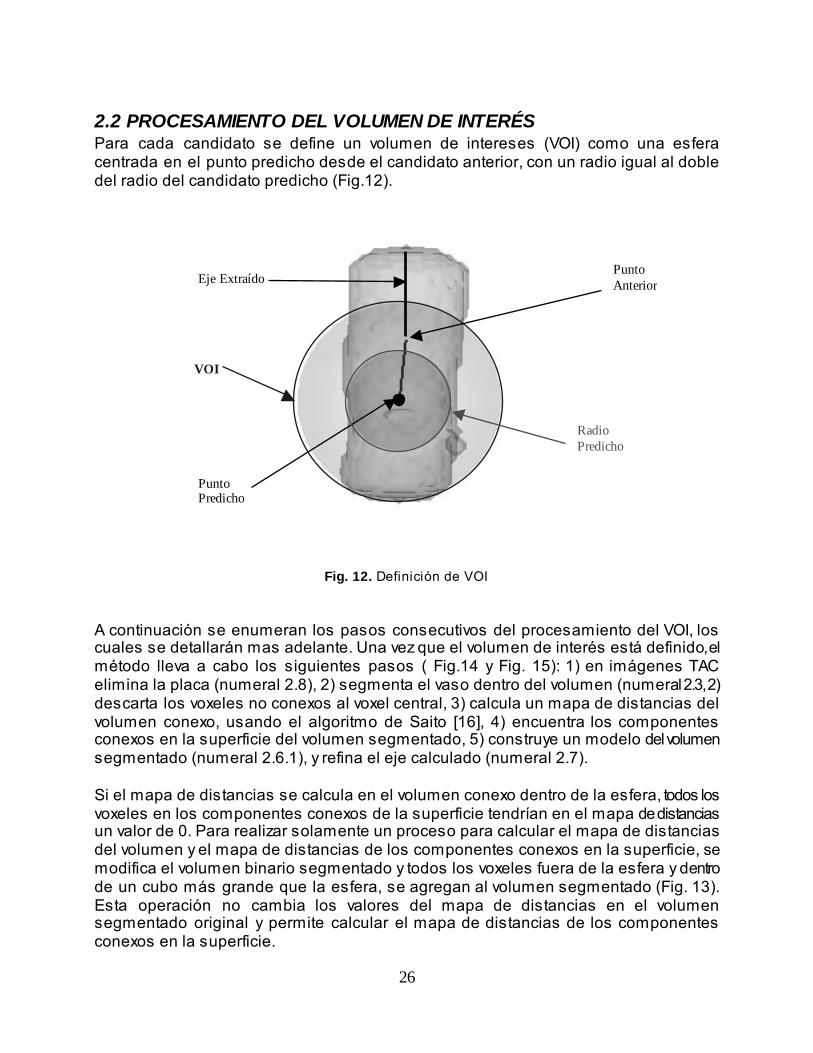
2.2 PROCESAMIENTO DEL VOLUMEN DE INTERÉS Para cada candidato se define un volumen de intereses (VOI) como una esfera centrada en el punto predicho desde el candidato anterior, con un radio igual al doble del radio del candidato predicho (Fig.12).
Fig. 12. Definición de VOI A continuación se enumeran los pasos consecutivos del procesamiento del VOI, los cuales se detallarán mas adelante. Una vez que el volumen de interés está definido, el método lleva a cabo los siguientes pasos ( Fig.14 y Fig. 15): 1) en imágenes TAC elimina la placa (numeral 2.8), 2) segmenta el vaso dentro del volumen (numeral 2.3, 2) descarta los voxeles no conexos al voxel central, 3) calcula un mapa de distancias del volumen conexo, usando el algoritmo de Saito [16], 4) encuentra los componentes conexos en la superficie del volumen segmentado, 5) construye un modelo del volumen segmentado (numeral 2.6.1), y refina el eje calculado (numeral 2.7). Si el mapa de distancias se calcula en el volumen conexo dentro de la esfera, todos los voxeles en los componentes conexos de la superficie tendrían en el mapa de distancias un valor de 0. Para realizar solamente un proceso para calcular el mapa de distancias del volumen y el mapa de distancias de los componentes conexos en la superficie, se modifica el volumen binario segmentado y todos los voxeles fuera de la esfera y dentro de un cubo más grande que la esfera, se agregan al volumen segmentado (Fig. 13). Esta operación no cambia los valores del mapa de distancias en el volumen segmentado original y permite calcular el mapa de distancias de los componentes conexos en la superficie.
VOI
Punto Predicho
Radio Predicho
Punto Anterior Eje Extraído
27
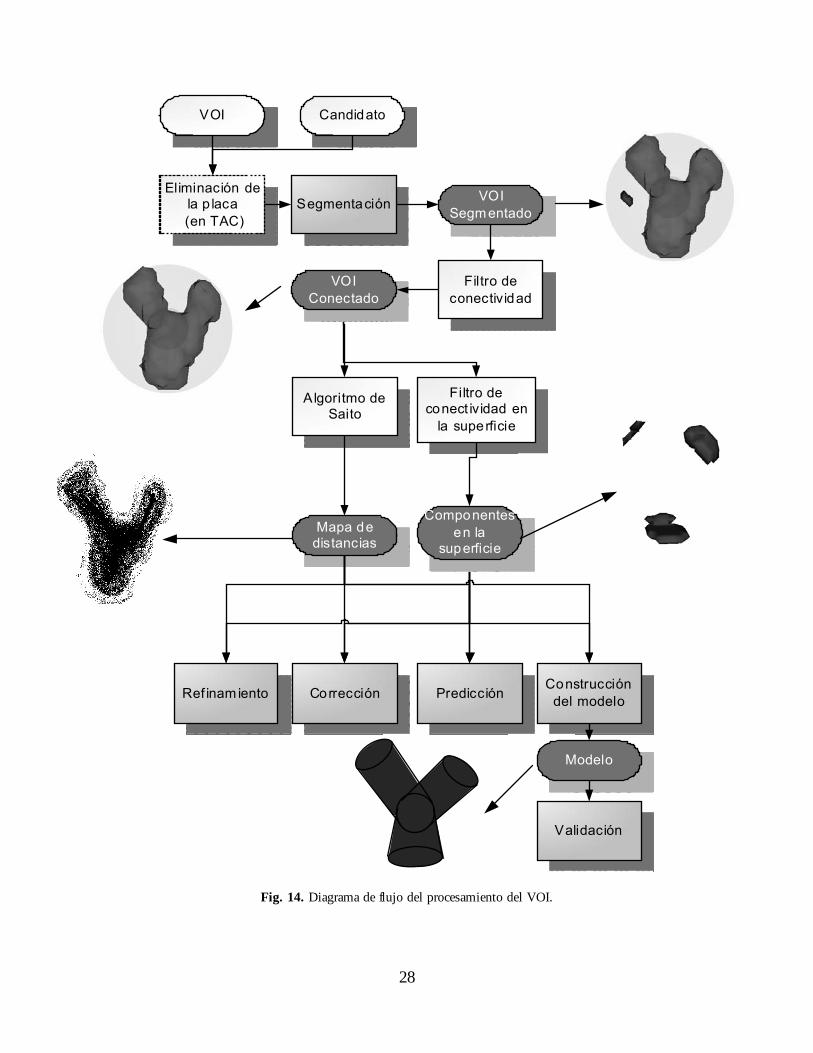
Fig. 13. Modificación del volumen segmentado antes del cálculo del mapa de distancias Los pasos principales del algoritmo, es decir, corrección, predicción y validación de candidatos, utilizan el resultado del procesamiento del VOI (Fig. 14). El proceso de corrección se basa en el análisis del mapa de distancias calculado sobre el volumen segmentado. Este paso se explica en el numeral 2.4. El proceso de predicción se basa en el análisis del mapa de distancias calculado sobre el volumen segmentado y los componentes conexos en la superficie. Este paso se explica en el numeral 2.5. El proceso de validación se basa en la comparación del modelo y el volumen segmentado. Este paso se explica en el numeral 2.6.2. El proceso de refinamiento se basa en el análisis del mapa de distancias calculado sobre el volumen segmentado y los componentes conexos en la superficie. Este paso se explica en el numeral 2.7. El proceso de eliminación de la palca se basa en el análisis de la evolución de la media y la varianza fotométrica de los voxeles que pertenecen al vaso. Este paso se explica en el numeral 2.8.
28
Eliminación de la p laca
(en TAC)
Filtro de conectividad
Algoritmo de Saito
Filtro de conect ividad en
la superficie
Corrección Predicción
Validación
Construcción del modelo
Mapa de distancias
VOI Candidato
Ref inam iento
Segmentación
VOI Conectado
VOI Segmentado
Modelo
Componentes en la
superficie
Fig. 14. Diagrama de flujo del procesamiento del VOI.

29
2.3 METODO DE SEGMENTACION El método de segmentación es el paso más importante de todo el procesamiento del VOI. Los procesos de corrección, predicción y validación dependen del resultado de la segmentación. El método de segmentación se basa en el algoritmo de agrupamiento de K-Means (K-Medias) [18]. El objetivo del algoritmo K-Means es agrupar M puntos en el espacio N dimensional en K grupos mutuamente excluyentes Sj que contienen cada uno Tj puntos, tales que la suma C de alguna medida de todos los puntos relativos al centroide del grupo correspondiente se minimiza. Normalmente, se usa el cuadrado de la distancia del objeto al centroide µj del grupo (Fig. 15):
∑∑−
= ∈
−=1
0
2K
j Snjn
j
xC µ (14)
Cuando el algoritmo divide los M puntos en K grupos, está dividiendo el espacio N dimensional en K regiones mutuamente excluyentes.
Fig. 15 Clasificación K-Means con 2 clases (0 y 1) y distancia euclidiana usada como medida.
En el método de segmentación desarrollado, cada imagen se ve como una tupla en 4 dimensiones. Cada tupla incluye 3 dimensiones espaciales y la intensidad de la imagen como cuarta dimensión.
Distancia 1 Centroide 0
Distancia 0
Centroide 1
30
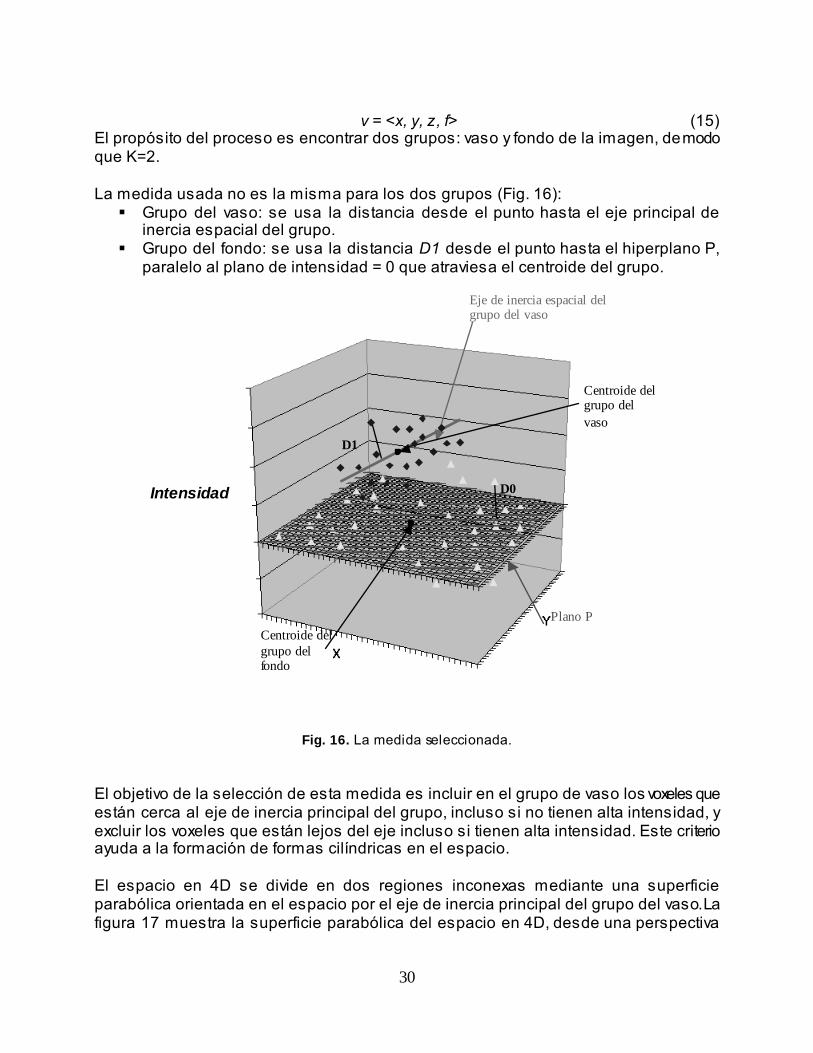
v = <x, y, z, f> (15)
El propósito del proceso es encontrar dos grupos: vaso y fondo de la imagen, de modo que K=2. La medida usada no es la misma para los dos grupos (Fig. 16): Grupo del vaso: se usa la distancia desde el punto hasta el eje principal de
inercia espacial del grupo. Grupo del fondo: se usa la distancia D1 desde el punto hasta el hiperplano P,
paralelo al plano de intensidad = 0 que atraviesa el centroide del grupo.
Fig. 16. La medida seleccionada. El objetivo de la selección de esta medida es incluir en el grupo de vaso los voxeles que están cerca al eje de inercia principal del grupo, incluso si no tienen alta intensidad, y excluir los voxeles que están lejos del eje incluso si tienen alta intensidad. Este criterio ayuda a la formación de formas cilíndricas en el espacio. El espacio en 4D se divide en dos regiones inconexas mediante una superficie parabólica orientada en el espacio por el eje de inercia principal del grupo del vaso. La figura 17 muestra la superficie parabólica del espacio en 4D, desde una perspectiva
D0
D1
Plano P
Eje de inercia espacial del grupo del vaso
Centroide del grupo del fondo
Centroide del grupo del vaso
Intensidad
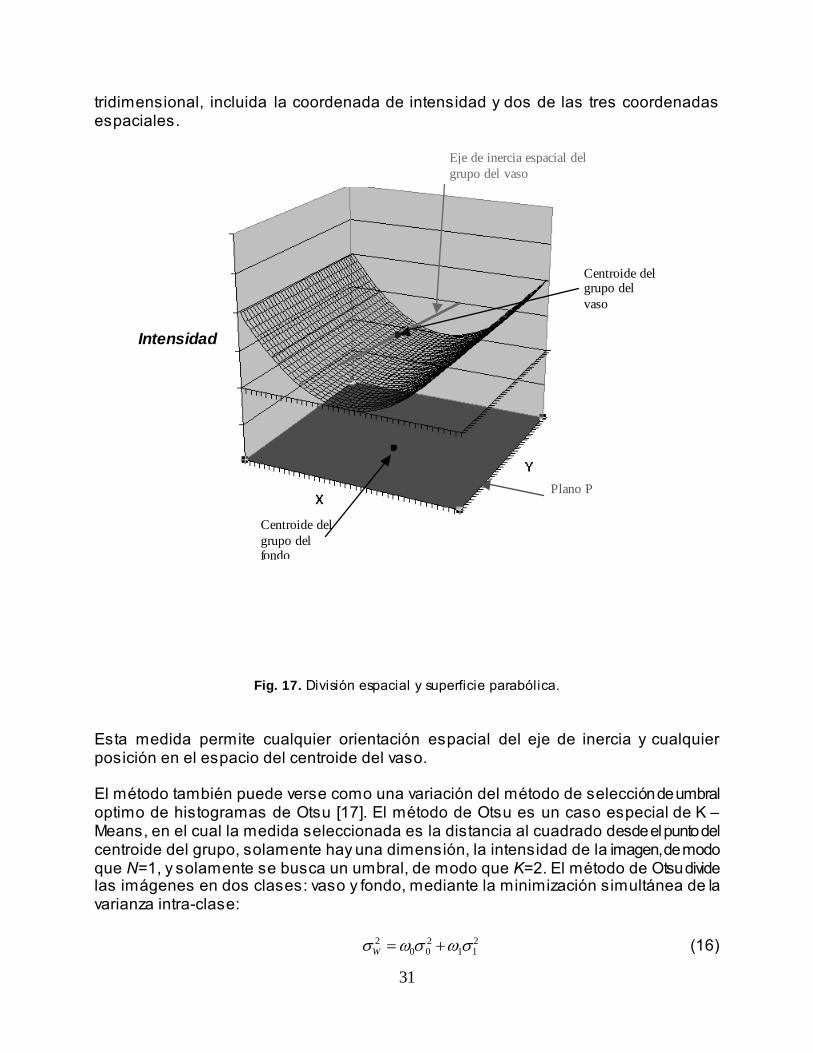
31
tridimensional, incluida la coordenada de intensidad y dos de las tres coordenadas espaciales.
Fig. 17. División espacial y superficie parabólica. Esta medida permite cualquier orientación espacial del eje de inercia y cualquier posición en el espacio del centroide del vaso. El método también puede verse como una variación del método de selección de umbral optimo de histogramas de Otsu [17]. El método de Otsu es un caso especial de K –Means, en el cual la medida seleccionada es la distancia al cuadrado desde el punto del centroide del grupo, solamente hay una dimensión, la intensidad de la imagen, de modo que N=1, y solamente se busca un umbral, de modo que K=2. El método de Otsu divide las imágenes en dos clases: vaso y fondo, mediante la minimización simultánea de la varianza intra-clase:
211
200
2 σωσωσ +=W (16)
Plano P
Eje de inercia espacial del grupo del vaso
Centroide del grupo del fondo
Centroide del grupo del vaso
Intensidad

32
y maximizando la varianza inter-clases:
( ) ( )2112
002
TTB µµωµµωσ −+−= (17) Ya que se puede demostrar que la suma de la varianza intra-clase y de la varianza inter-clases es la varianza total y sigue siendo siempre la misma:
222BWT σσσ += (18)
donde 0ω = T0 / M, razón del número de puntos del grupo del fondo sobre el número total de puntos.
1ω = T1 / M, razón del número de puntos del grupo del vaso sobre el número total de puntos.
20σ = varianza del grupo del fondo
21σ = varianza del grupo del vaso
2Tσ = varianza total
0µ = centroide del grupo del fondo
1µ = centroide del grupo del vaso
Tµ = centroide total El método de Otsu solamente considera la varianza fotométrica de las clases. Para incluir las características geométricas de la medida seleccionada es necesario agregar un término a la varianza intra-clase que se va a minimizar.
211
211
200
2 Ι++= ϕωσωσωσW (19) donde
21Ι = Inercia alrededor del eje principal del grupo 1
ϕ = parámetro de selectividad
El término de inercia es la suma del cuadrado de las distancias desde cada punto del grupo al eje de inercia principal del grupo. El método permite eliminar las estructuras hiper-intensas cerca del vaso, pero también podría eliminar las bifurcaciones. Esa es la razón por la cual debe agregarse el parámetro de selectividad con el objetivo controlar la influencia del término de inercia. La figura 18 muestra el efecto del parámetro ϕ.

33
Fig. 18. Influencia del parámetro ϕ. (a) ϕ =0.3 (b) ϕ =1 Si ϕ = 0 el método se convierte en el método de Otsu, y el espacio se divide usando solo el criterio de intensidad (Fig. 19).
Fig. 19. División espacial por el método de Otsu.
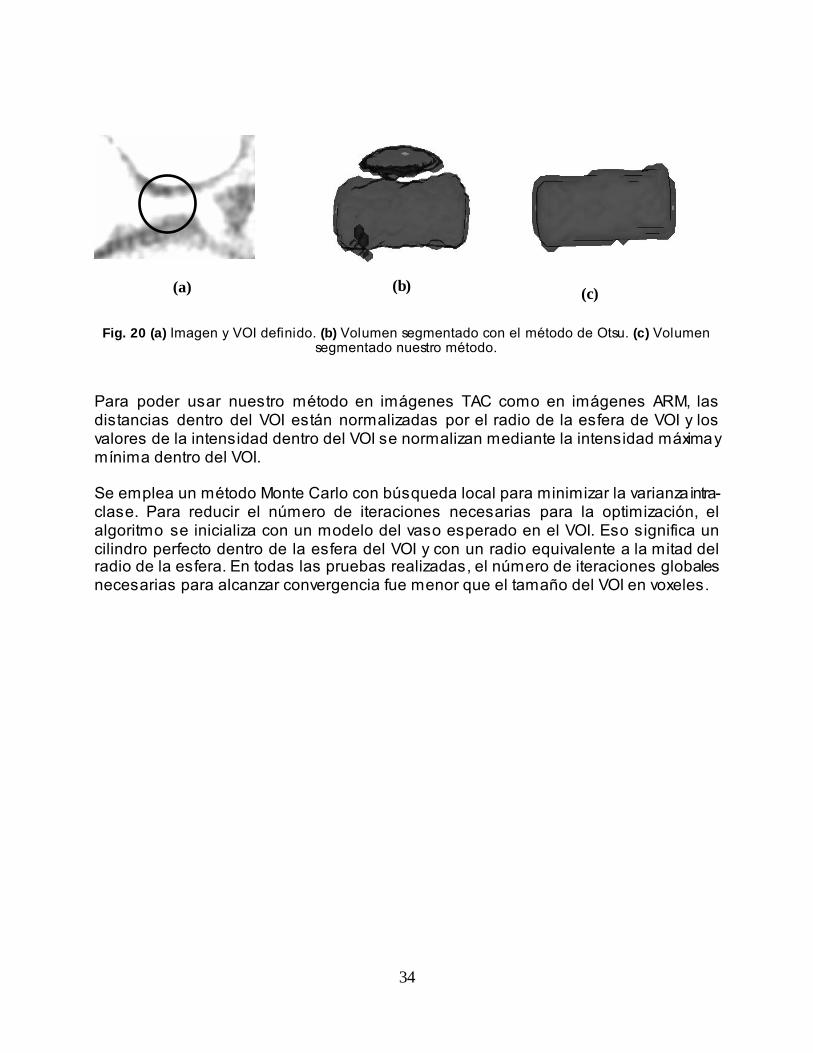
En la figura 20 el efecto de eliminación de estructuras se muestra en la extracción del árbol coronario. Como se ve, el vaso está muy cerca de la cavidad cardiaca y con el método de Otsu el volumen segmentado incluye parte de la cavidad. Con el método desarrollado, el volumen segmentado no incluye la cavidad y preserva su tamaño.
(b) (a)
Intensidad Intensidad
34
Fig. 20 (a) Imagen y VOI definido. (b) Volumen segmentado con el método de Otsu. (c) Volumen segmentado nuestro método.
Para poder usar nuestro método en imágenes TAC como en imágenes ARM, las distancias dentro del VOI están normalizadas por el radio de la esfera de VOI y los valores de la intensidad dentro del VOI se normalizan mediante la intensidad máxima y mínima dentro del VOI. Se emplea un método Monte Carlo con búsqueda local para minimizar la varianza intra-clase. Para reducir el número de iteraciones necesarias para la optimización, el algoritmo se inicializa con un modelo del vaso esperado en el VOI. Eso significa un cilindro perfecto dentro de la esfera del VOI y con un radio equivalente a la mitad del radio de la esfera. En todas las pruebas realizadas, el número de iteraciones globales necesarias para alcanzar convergencia fue menor que el tamaño del VOI en voxeles.
(b) (c) (a)
35
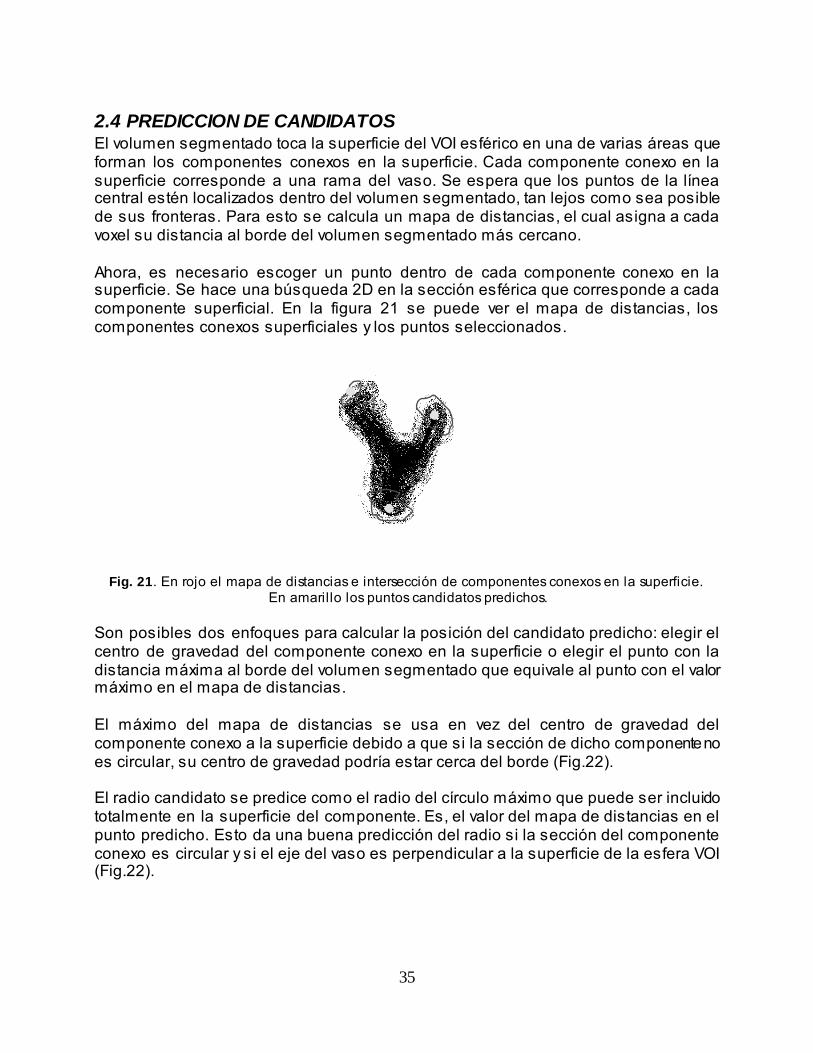
2.4 PREDICCION DE CANDIDATOS El volumen segmentado toca la superficie del VOI esférico en una de varias áreas que forman los componentes conexos en la superficie. Cada componente conexo en la superficie corresponde a una rama del vaso. Se espera que los puntos de la línea central estén localizados dentro del volumen segmentado, tan lejos como sea posible de sus fronteras. Para esto se calcula un mapa de distancias, el cual asigna a cada voxel su distancia al borde del volumen segmentado más cercano. Ahora, es necesario escoger un punto dentro de cada componente conexo en la superficie. Se hace una búsqueda 2D en la sección esférica que corresponde a cada componente superficial. En la figura 21 se puede ver el mapa de distancias, los componentes conexos superficiales y los puntos seleccionados.
Fig. 21. En rojo el mapa de distancias e intersección de componentes conexos en la superficie. En amarillo los puntos candidatos predichos.
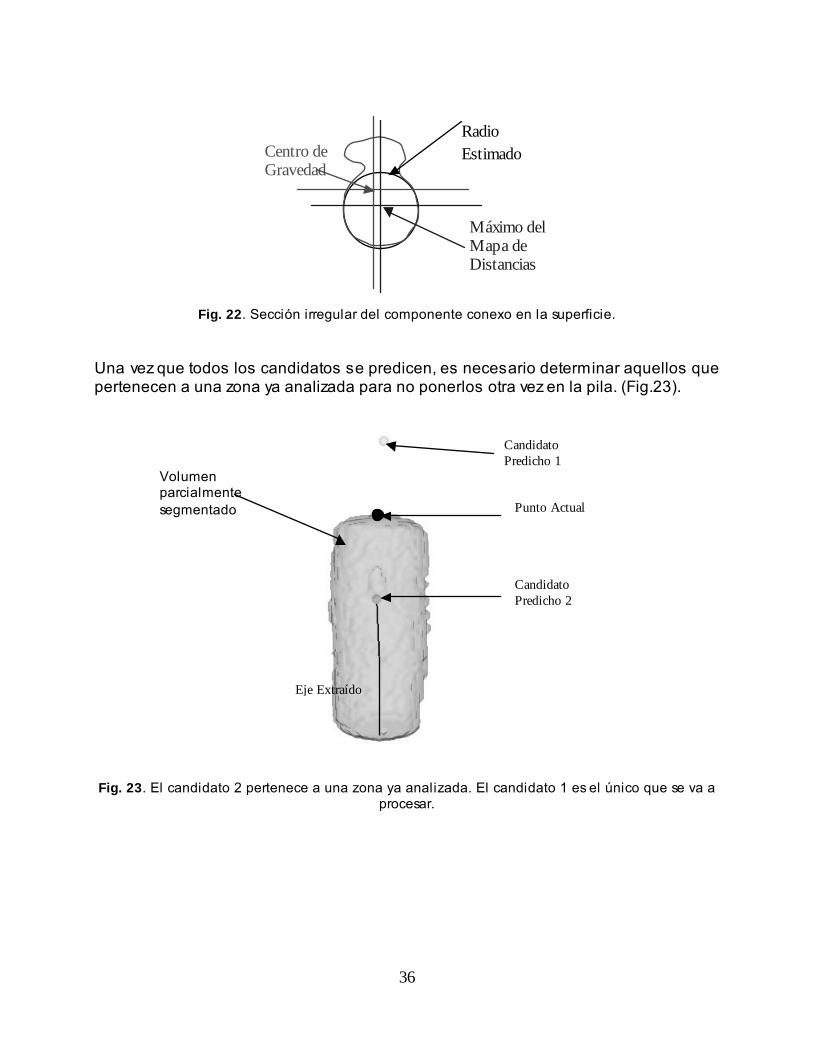
Son posibles dos enfoques para calcular la posición del candidato predicho: elegir el centro de gravedad del componente conexo en la superficie o elegir el punto con la distancia máxima al borde del volumen segmentado que equivale al punto con el valor máximo en el mapa de distancias. El máximo del mapa de distancias se usa en vez del centro de gravedad del componente conexo a la superficie debido a que si la sección de dicho componente no es circular, su centro de gravedad podría estar cerca del borde (Fig.22). El radio candidato se predice como el radio del círculo máximo que puede ser incluido totalmente en la superficie del componente. Es, el valor del mapa de distancias en el punto predicho. Esto da una buena predicción del radio si la sección del componente conexo es circular y si el eje del vaso es perpendicular a la superficie de la esfera VOI (Fig.22).
36
Fig. 22. Sección irregular del componente conexo en la superficie. Una vez que todos los candidatos se predicen, es necesario determinar aquellos que pertenecen a una zona ya analizada para no ponerlos otra vez en la pila. (Fig.23). Fig. 23. El candidato 2 pertenece a una zona ya analizada. El candidato 1 es el único que se va a
procesar.
Máximo del Mapa de Distancias
Centro de Gravedad
Radio Estimado
Candidato Predicho 1
Candidato Predicho 2
Eje Extraído
Volumen parcialmente segmentado Punto Actual

37
2.5 CORRECCIÓN DE CANDIDATOS El proceso de predicción se basa en la hipótesis según la cual el eje del vaso es perpendicular a la superficie de la esfera VOI y en la hipótesis según la cual cada sección de un componente conexo es casi circular. Cuando una de estas dos hipótesis no se cumple, la posición y el radio del candidato predicho no son las reales. Entonces el candidato debe corregirse con base en la información del VOI actual.
2.5.1 CORRECCIÓN DEL PUNTO Recordemos que el eje del vaso se define como el eje medio del volumen segmentado, de modo que los puntos del eje deben ser los centros de las esferas con radio máximo que pueden ser totalmente incluidas en el volumen. Por consiguiente estos puntos corresponden a los voxeles donde los valores del mapa de distancias son máximos. Para corregir la posición del candidato es entonces necesario buscar el punto donde el valor del mapa de distancias es máximo. Esta búsqueda a diferencia que en la predicción se hace en un espacio 3D y que esta limitado de modo que el candidato no se aleje demasiado del punto anterior. Si existe algún voxel con un valor mayor en el mapa de distancias del volumen de búsqueda, que el valor del mapa de distancias en el punto predicho, el candidato debe moverse hacia ese punto (Fig. 24).
Fig. 24. Mapa de distancias del VOI. Los diferentes colores representan los rangos de valores.
Punto Predicho
Punto Corregido
Punto Anterior
Volumen de Búsqueda
38
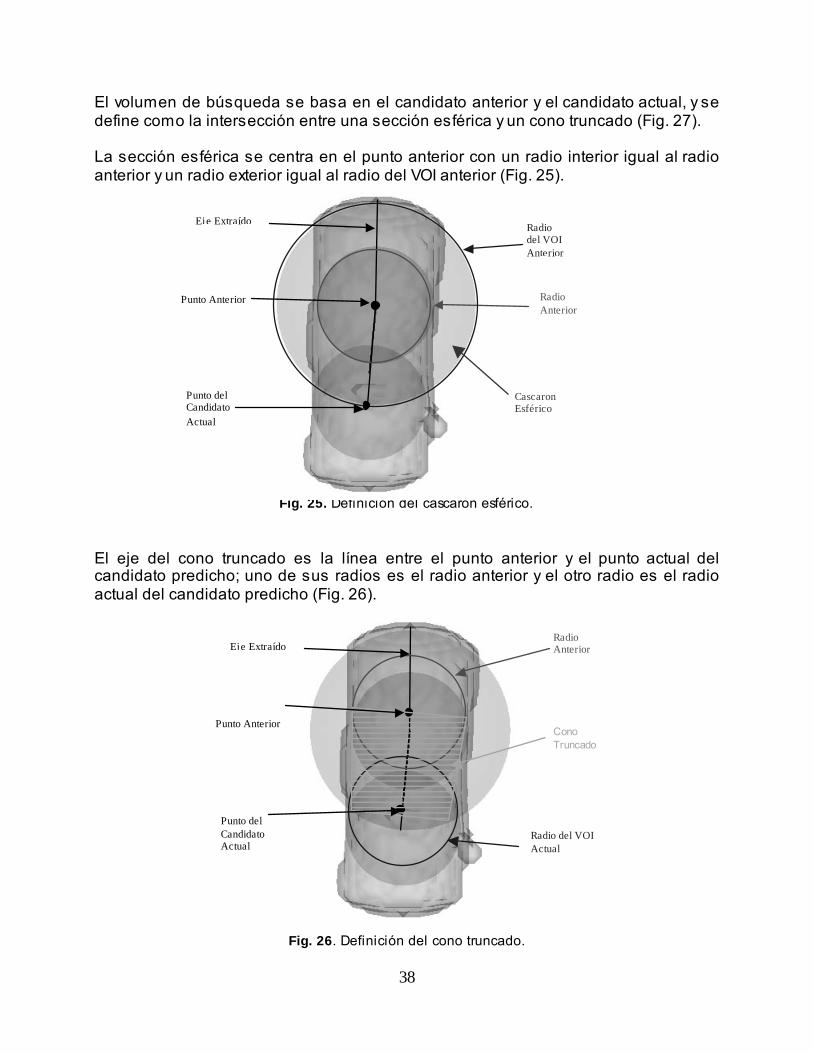
El volumen de búsqueda se basa en el candidato anterior y el candidato actual, y se define como la intersección entre una sección esférica y un cono truncado (Fig. 27). La sección esférica se centra en el punto anterior con un radio interior igual al radio anterior y un radio exterior igual al radio del VOI anterior (Fig. 25).
Fig. 25. Definición del cascaron esférico. El eje del cono truncado es la línea entre el punto anterior y el punto actual del candidato predicho; uno de sus radios es el radio anterior y el otro radio es el radio actual del candidato predicho (Fig. 26).
Fig. 26. Definición del cono truncado.
Cono Truncado
Radio Anterior
Radio del VOI Anterior
Punto Anterior
Cascaron Esférico
Punto del Candidato Actual
Eje Extraído
Radio Anterior
Radio del VOI Actual
Punto Anterior
Punto del Candidato Actual
Eje Extraído
39
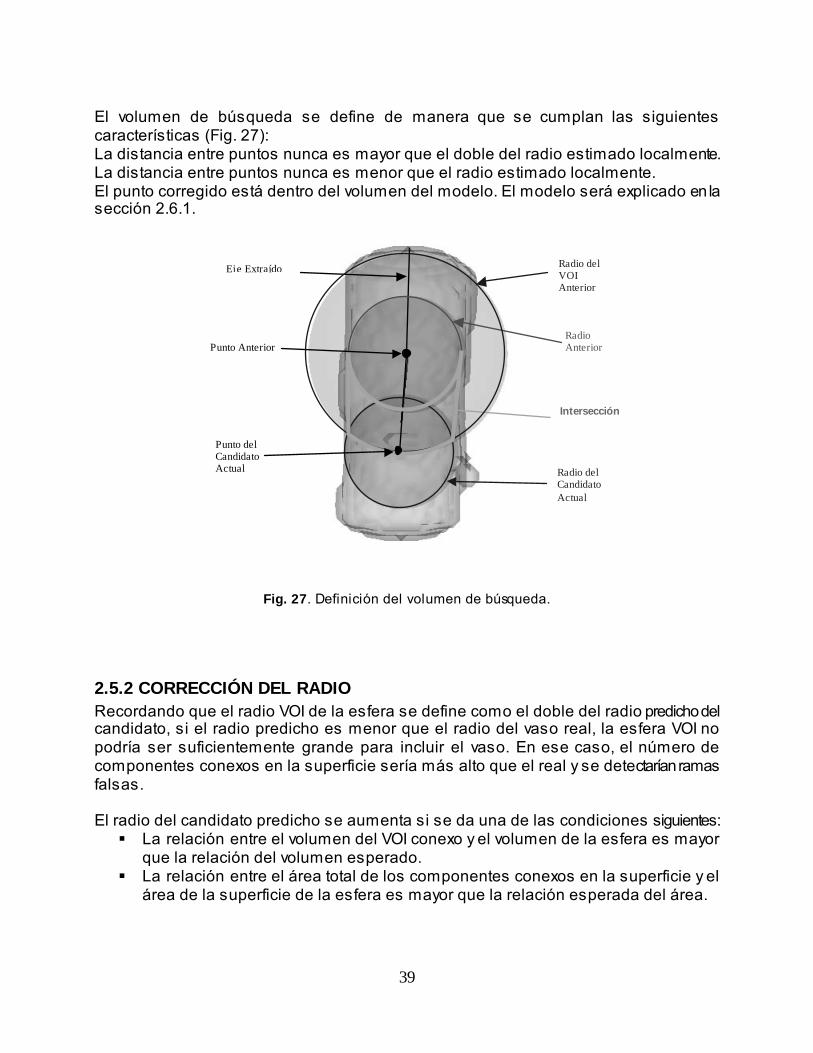
El volumen de búsqueda se define de manera que se cumplan las siguientes características (Fig. 27): La distancia entre puntos nunca es mayor que el doble del radio estimado localmente. La distancia entre puntos nunca es menor que el radio estimado localmente. El punto corregido está dentro del volumen del modelo. El modelo será explicado en la sección 2.6.1.
Fig. 27. Definición del volumen de búsqueda.
2.5.2 CORRECCIÓN DEL RADIO Recordando que el radio VOI de la esfera se define como el doble del radio predicho del candidato, si el radio predicho es menor que el radio del vaso real, la esfera VOI no podría ser suficientemente grande para incluir el vaso. En ese caso, el número de componentes conexos en la superficie sería más alto que el real y se detectarían ramas falsas. El radio del candidato predicho se aumenta si se da una de las condiciones siguientes: La relación entre el volumen del VOI conexo y el volumen de la esfera es mayor
que la relación del volumen esperado. La relación entre el área total de los componentes conexos en la superficie y el
área de la superficie de la esfera es mayor que la relación esperada del área.
Intersección
Radio Anterior
Radio del Candidato Actual
Punto Anterior
Punto del Candidato Actual
Eje Extraído Radio del VOI Anterior

40
La relación esperada del volumen es la relación del volumen entre un cilindro perfecto dentro de la esfera y la mitad del radio de la esfera (Fig. 28). La relación del área esperada es la relación entre el área transversal de los bordes de un cilindro perfecto dentro de la esfera y la esfera de la mitad del radio y el área de la superficie de la esfera (Fig. 28).
Fig. 28. Definición del cilindro perfecto. Volumen de la esfera = 4/3 x π x R3
Volumen del cilindro = 2 x R x π x (R/2)2
Relación esperada del volumen = Volumen del cilindro / Volumen de la esfera = 6/16 = 0.375 Área de la superficie de la esfera = 4 x π x R2
Área del componente de la superficie = π x (R/2)2
Área total de los componentes en la superficie = número de componentes conexos en la superficie x π x (R/2)2
Relación esperada del área = Área total de los componentes de la superficie / área de la superficie de la esfera. = número de componentes conexos a la superficie /16 = número de componentes conexos en la superficie x 0.0625. El incremento del radio es el tamaño mínimo de las aristas del voxel.
Radio de la esfera
Radio del cilindro
Largo del cilindro
R

41
2.6 VALIDACIÓN DE CANDIDATOS Una vez calculado el volumen conexo, el mapa de distancias y los componentes conexos en la superficie, se verifica la similitud entre el volumen conexo y la forma cilíndrica de un segmento vascular por medio de un criterio de cilindricidad. El criterio de cilindricidad se basa en la comparación del volumen conexo contra el modelo del vaso construido en la región esférica definida para el candidato actual (Fig. 29). Más adelante se describe la construcción del modelo y se detallan los criterios de comparación.
Fig. 29. (a) Volumen conexo. (b) Modelo construido. (c) Comparación.
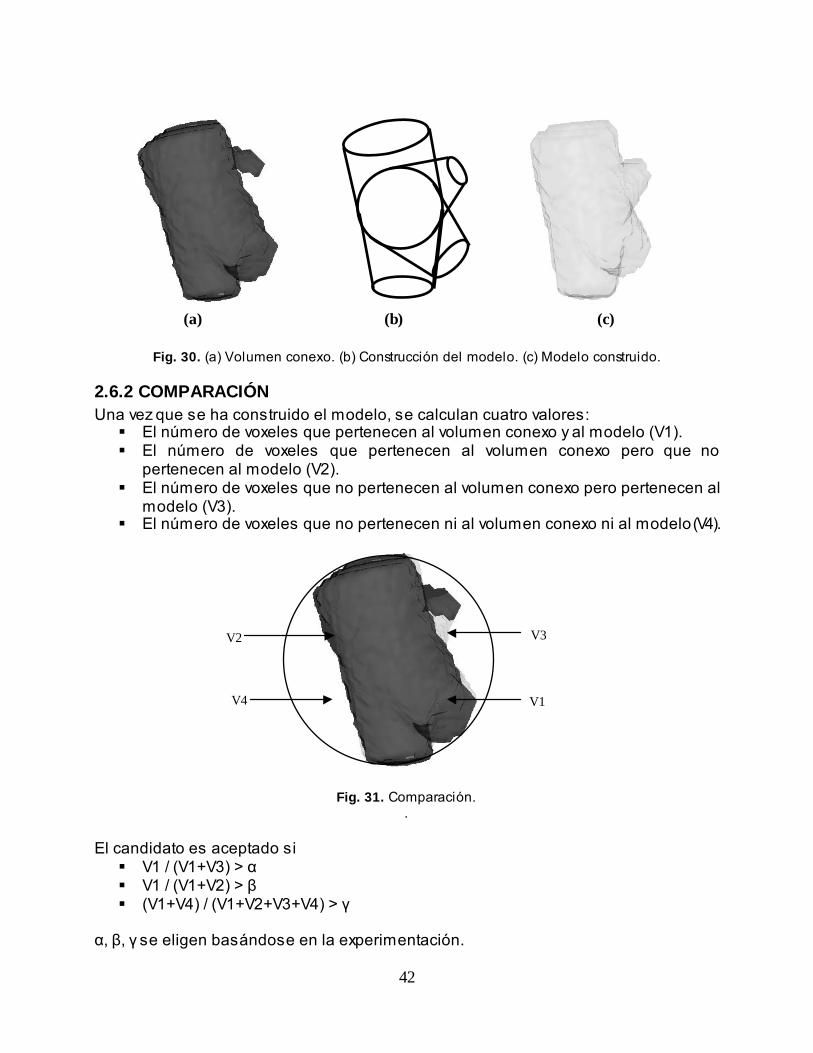
2.6.1 CONSTRUCCIÓN DEL MODELO El proceso de construcción del modelo se basa en la suma de varios volúmenes básicos. Primero una esfera con radio igual al valor del mapa de distancias en el centro del VOI se agrega, centrada en el centro de la región. Después, para cada componente conexo en la superficie se define un cono truncado, cuyo eje es la línea entre el punto del centro y punto del candidato predicho para ese componente. Uno de estos radios es el radio de la esfera, calculado en el primer paso y el otro radio es el radio del candidato predicho para ese componente (Fig. 30).
(a) (b) (c)
42
Fig. 30. (a) Volumen conexo. (b) Construcción del modelo. (c) Modelo construido.
2.6.2 COMPARACIÓN Una vez que se ha construido el modelo, se calculan cuatro valores: El número de voxeles que pertenecen al volumen conexo y al modelo (V1). El número de voxeles que pertenecen al volumen conexo pero que no
pertenecen al modelo (V2). El número de voxeles que no pertenecen al volumen conexo pero pertenecen al
modelo (V3). El número de voxeles que no pertenecen ni al volumen conexo ni al modelo (V4).
Fig. 31. Comparación. .
El candidato es aceptado si V1 / (V1+V3) > α V1 / (V1+V2) > β (V1+V4) / (V1+V2+V3+V4) > γ
α, β, γ se eligen basándose en la experimentación.
(a) (b) (c)
V1
V2 V3
V4
43
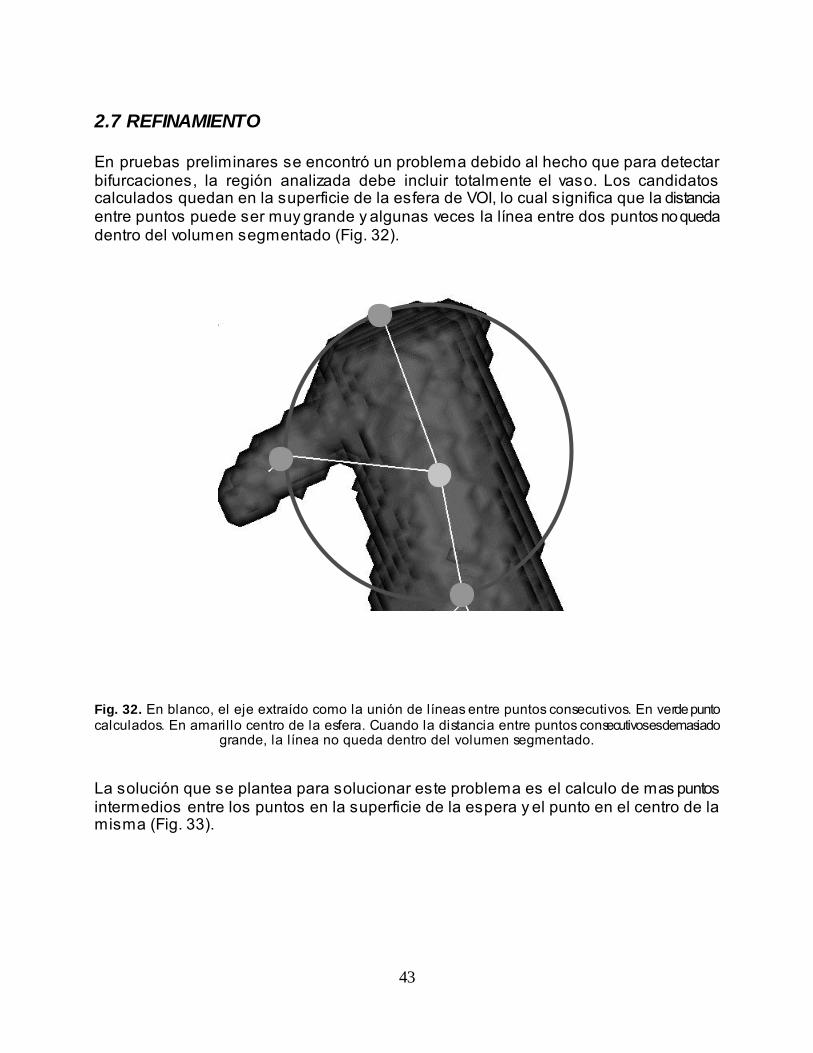
2.7 REFINAMIENTO En pruebas preliminares se encontró un problema debido al hecho que para detectar bifurcaciones, la región analizada debe incluir totalmente el vaso. Los candidatos calculados quedan en la superficie de la esfera de VOI, lo cual significa que la distancia entre puntos puede ser muy grande y algunas veces la línea entre dos puntos no queda dentro del volumen segmentado (Fig. 32).
Fig. 32. En blanco, el eje extraído como la unión de líneas entre puntos consecutivos. En verde punto calculados. En amarillo centro de la esfera. Cuando la distancia entre puntos consecutivos es demasiado
grande, la línea no queda dentro del volumen segmentado.
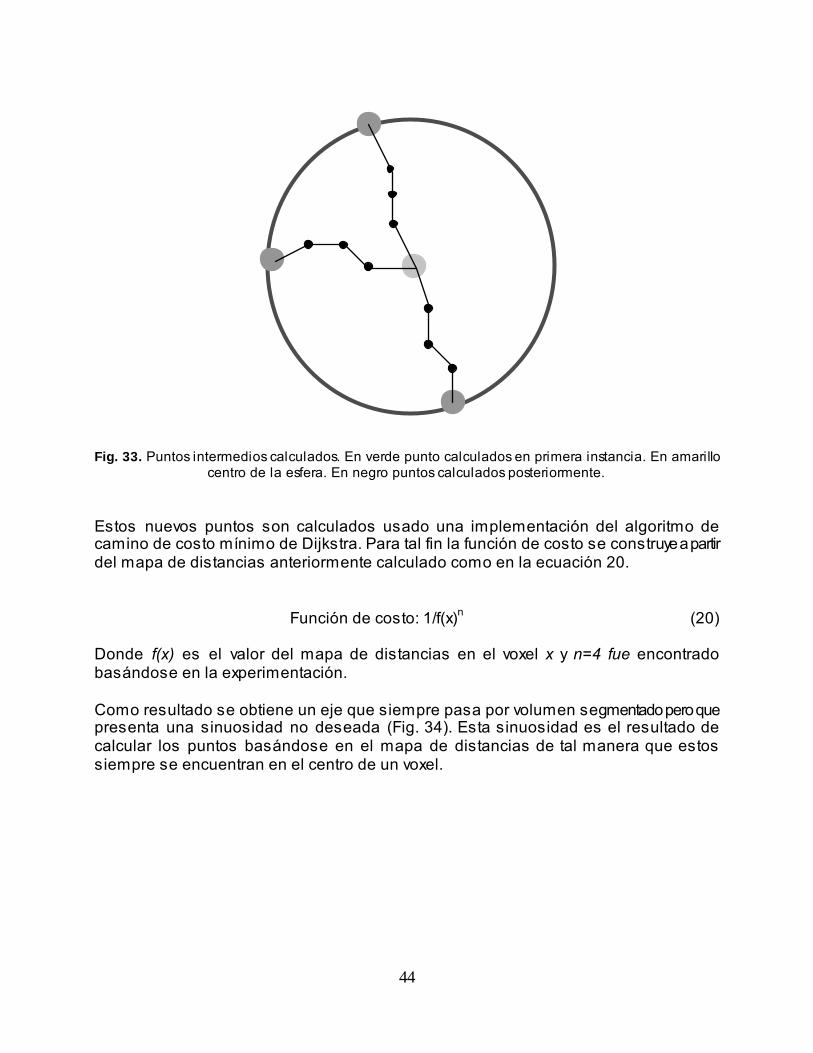
La solución que se plantea para solucionar este problema es el calculo de mas puntos intermedios entre los puntos en la superficie de la espera y el punto en el centro de la misma (Fig. 33).
44
Fig. 33. Puntos intermedios calculados. En verde punto calculados en primera instancia. En amarillo
centro de la esfera. En negro puntos calculados posteriormente.
Estos nuevos puntos son calculados usado una implementación del algoritmo de camino de costo mínimo de Dijkstra. Para tal fin la función de costo se construye a partir del mapa de distancias anteriormente calculado como en la ecuación 20.
Función de costo: 1/f(x)n (20) Donde f(x) es el valor del mapa de distancias en el voxel x y n=4 fue encontrado basándose en la experimentación. Como resultado se obtiene un eje que siempre pasa por volumen segmentado pero que presenta una sinuosidad no deseada (Fig. 34). Esta sinuosidad es el resultado de calcular los puntos basándose en el mapa de distancias de tal manera que estos siempre se encuentran en el centro de un voxel.
2 3

45
Fig. 34. Eje incluyendo los puntos intermedios posteriormente calculados. Se puede ver una sinuosidad
no deseada. Para solucionar este problema el eje es procesado con un filtro pasa-bajas espacial que preserva las ubicaciones de las bifurcaciones. El la figura 35 se puede ver el resultado del filtrado del eje. El eje final tiene una resolución menor al tamaño del voxel.
Fig. 35. Eje final filtrado.

46
2.8 ELIMINACIÓN DE LA PLACA En imágenes TAC de arterias patológicas se encontró un problema en pruebas preliminares cuando los vasos presentan calcificaciones. A diferencia de las imágenes ARM, las imágenes TAC no son sustraídas por lo que las calcificaciones están presentes al momento de extraer el eje. En muchos casos las calcificaciones eran clasificadas como vasos y los vasos eran clasificados como fondo por el algoritmo de segmentación, en estos casos el algoritmo se detenía tempranamente. Un análisis del histograma de las imágenes TAC con calcificaciones permitió detectar que el modo del vaso terminaba a aproximadamente 2.5 desviaciones estándar del promedio del modo (Fig. 36).
Fig. 36. Imagen TAC con calcificaciones en la que el final del modo del vaso esta a 2.5 desviaciones
estándar del promedio. Por consiguiente para eliminar las calcificaciones en cada paso del algoritmo se eliminan los voxeles cuyas intensidades sean mayores a:
2.5*σi-1 +µi-1 (21) Donde σi-1 es la desviación estándar de las intensidades del vaso segmentado en el paso anterior.
0
50
100
150
200
250
300
1 100 199 298 397 496 595 694 793 892 991 1090 1189
Serie1
µµ
22..55**σσ

47
y µi-1 es el promedio de las intensidades del vaso segmentado en el paso anterior. En la Fig. 37 se puede ver el resultado final de procesamiento. El volumen segmentado no incluye las calcificaciones y el eje pasa por el centro del lumen sin calcificación.
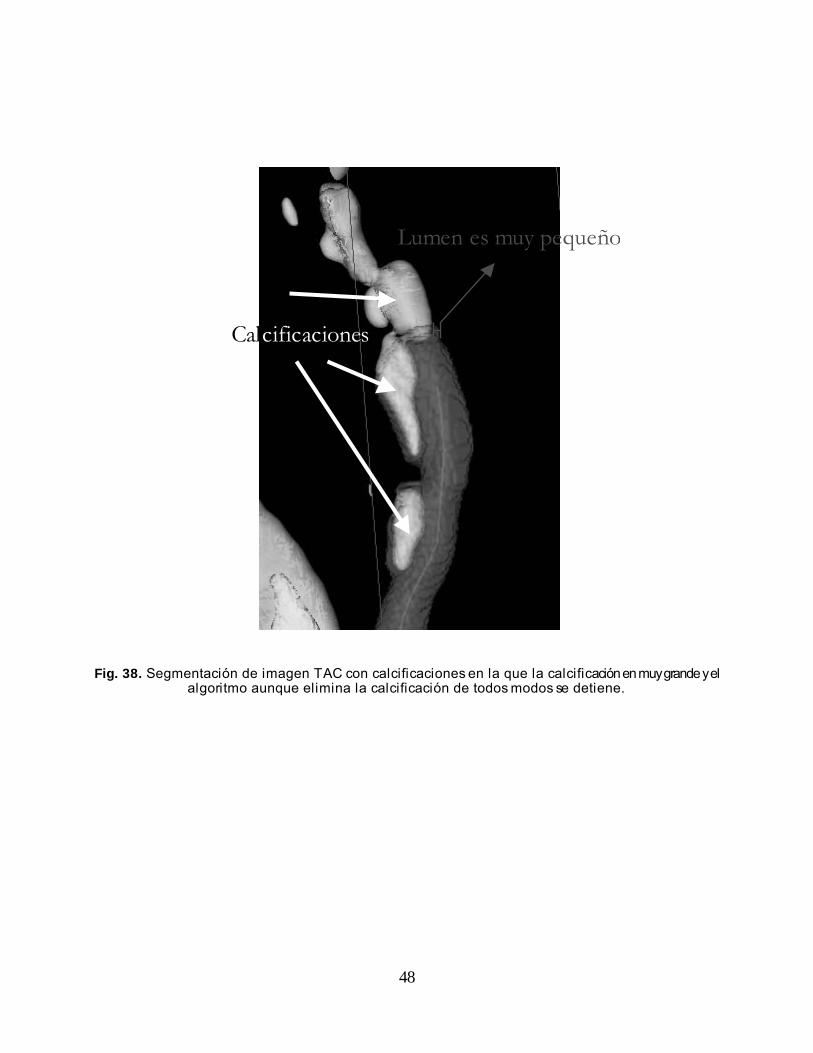
Fig. 37. Segmentación de imagen TAC con calcificaciones. Sin embargo en casos muy patológicos en los que la calcificación es más grande que el lumen, el algoritmo continua deteniéndose debido a que no son detectados componentes conexos en la superficie(Fig. 38).
Hueco
48
Fig. 38. Segmentación de imagen TAC con calcificaciones en la que la calcificación en muy grande y el algoritmo aunque elimina la calcificación de todos modos se detiene.
Calcificaciones
Lumen es muy pequeño
49
3. EVALUACIÓN
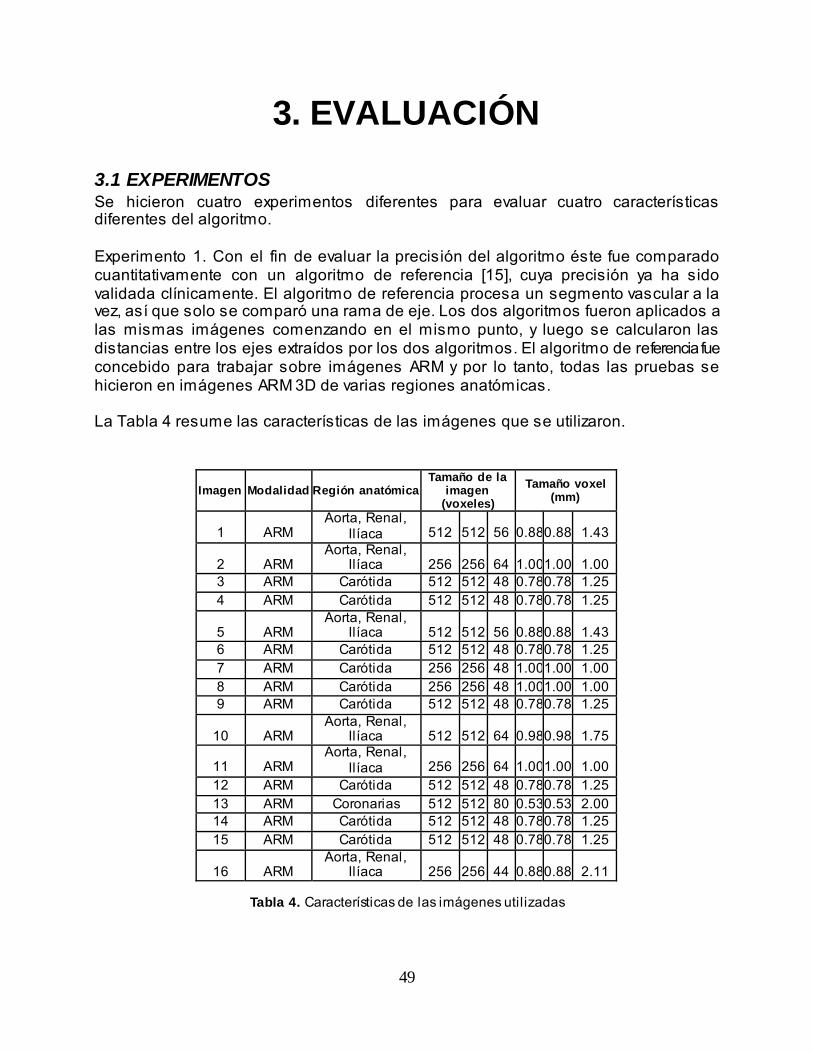
3.1 EXPERIMENTOS Se hicieron cuatro experimentos diferentes para evaluar cuatro características diferentes del algoritmo. Experimento 1. Con el fin de evaluar la precisión del algoritmo éste fue comparado cuantitativamente con un algoritmo de referencia [15], cuya precisión ya ha sido validada clínicamente. El algoritmo de referencia procesa un segmento vascular a la vez, así que solo se comparó una rama de eje. Los dos algoritmos fueron aplicados a las mismas imágenes comenzando en el mismo punto, y luego se calcularon las distancias entre los ejes extraídos por los dos algoritmos. El algoritmo de referencia fue concebido para trabajar sobre imágenes ARM y por lo tanto, todas las pruebas se hicieron en imágenes ARM 3D de varias regiones anatómicas. La Tabla 4 resume las características de las imágenes que se utilizaron.
Imagen Modalidad Región anatómica Tamaño de la
imagen (voxeles)
Tamaño voxel (mm)
1 ARM Aorta, Renal,
Ilíaca 512 512 56 0.880.88 1.43
2 ARM Aorta, Renal,
Ilíaca 256 256 64 1.001.00 1.00 3 ARM Carótida 512 512 48 0.780.78 1.25 4 ARM Carótida 512 512 48 0.780.78 1.25
5 ARM Aorta, Renal,
Ilíaca 512 512 56 0.880.88 1.43 6 ARM Carótida 512 512 48 0.780.78 1.25 7 ARM Carótida 256 256 48 1.001.00 1.00 8 ARM Carótida 256 256 48 1.001.00 1.00 9 ARM Carótida 512 512 48 0.780.78 1.25
10 ARM Aorta, Renal,
Ilíaca 512 512 64 0.980.98 1.75
11 ARM Aorta, Renal,
Ilíaca 256 256 64 1.001.00 1.00 12 ARM Carótida 512 512 48 0.780.78 1.25 13 ARM Coronarias 512 512 80 0.530.53 2.00 14 ARM Carótida 512 512 48 0.780.78 1.25 15 ARM Carótida 512 512 48 0.780.78 1.25
16 ARM Aorta, Renal,
Ilíaca 256 256 44 0.880.88 2.11
Tabla 4. Características de las imágenes utilizadas
50
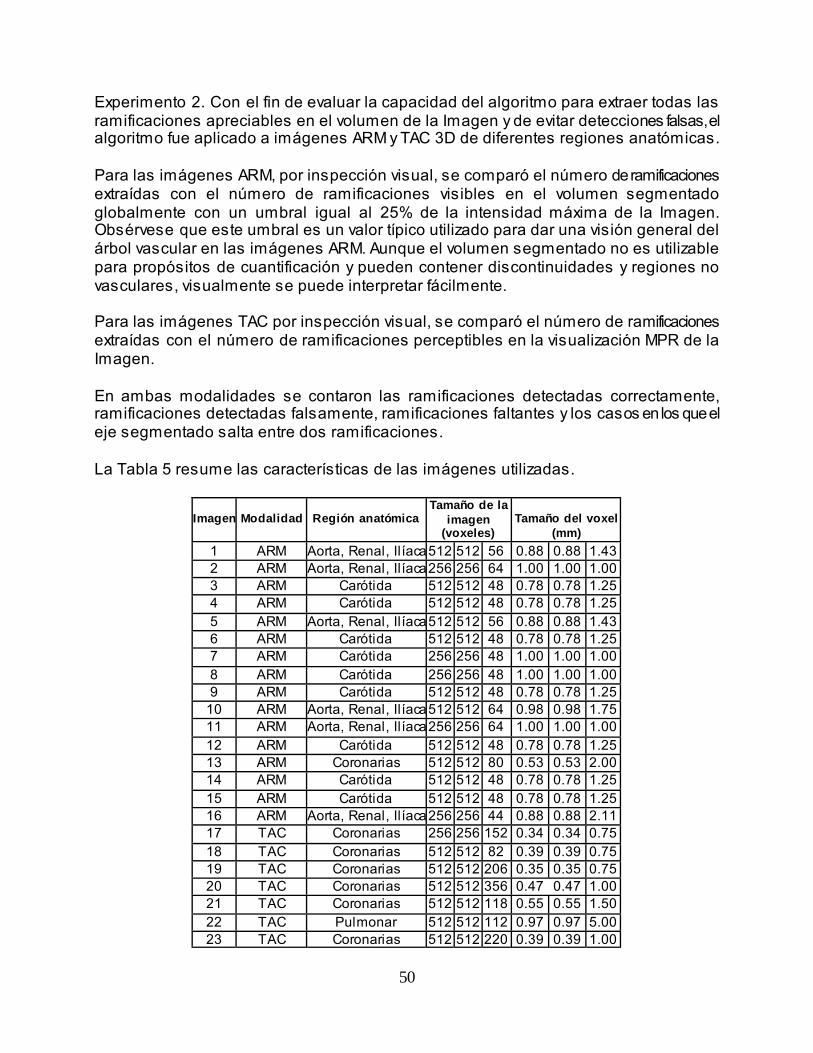
Experimento 2. Con el fin de evaluar la capacidad del algoritmo para extraer todas las ramificaciones apreciables en el volumen de la Imagen y de evitar detecciones falsas, el algoritmo fue aplicado a imágenes ARM y TAC 3D de diferentes regiones anatómicas. Para las imágenes ARM, por inspección visual, se comparó el número de ramificaciones extraídas con el número de ramificaciones visibles en el volumen segmentado globalmente con un umbral igual al 25% de la intensidad máxima de la Imagen. Obsérvese que este umbral es un valor típico utilizado para dar una visión general del árbol vascular en las imágenes ARM. Aunque el volumen segmentado no es utilizable para propósitos de cuantificación y pueden contener discontinuidades y regiones no vasculares, visualmente se puede interpretar fácilmente. Para las imágenes TAC por inspección visual, se comparó el número de ramificaciones extraídas con el número de ramificaciones perceptibles en la visualización MPR de la Imagen. En ambas modalidades se contaron las ramificaciones detectadas correctamente, ramificaciones detectadas falsamente, ramificaciones faltantes y los casos en los que el eje segmentado salta entre dos ramificaciones. La Tabla 5 resume las características de las imágenes utilizadas.
Imagen Modalidad Región anatómica Tamaño de la
imagen (voxeles)
Tamaño del voxel (mm)
1 ARM Aorta, Renal, Ilíaca512 512 56 0.88 0.88 1.43 2 ARM Aorta, Renal, Ilíaca256 256 64 1.00 1.00 1.00 3 ARM Carótida 512 512 48 0.78 0.78 1.25 4 ARM Carótida 512 512 48 0.78 0.78 1.25 5 ARM Aorta, Renal, Ilíaca512 512 56 0.88 0.88 1.43 6 ARM Carótida 512 512 48 0.78 0.78 1.25 7 ARM Carótida 256 256 48 1.00 1.00 1.00 8 ARM Carótida 256 256 48 1.00 1.00 1.00 9 ARM Carótida 512 512 48 0.78 0.78 1.25
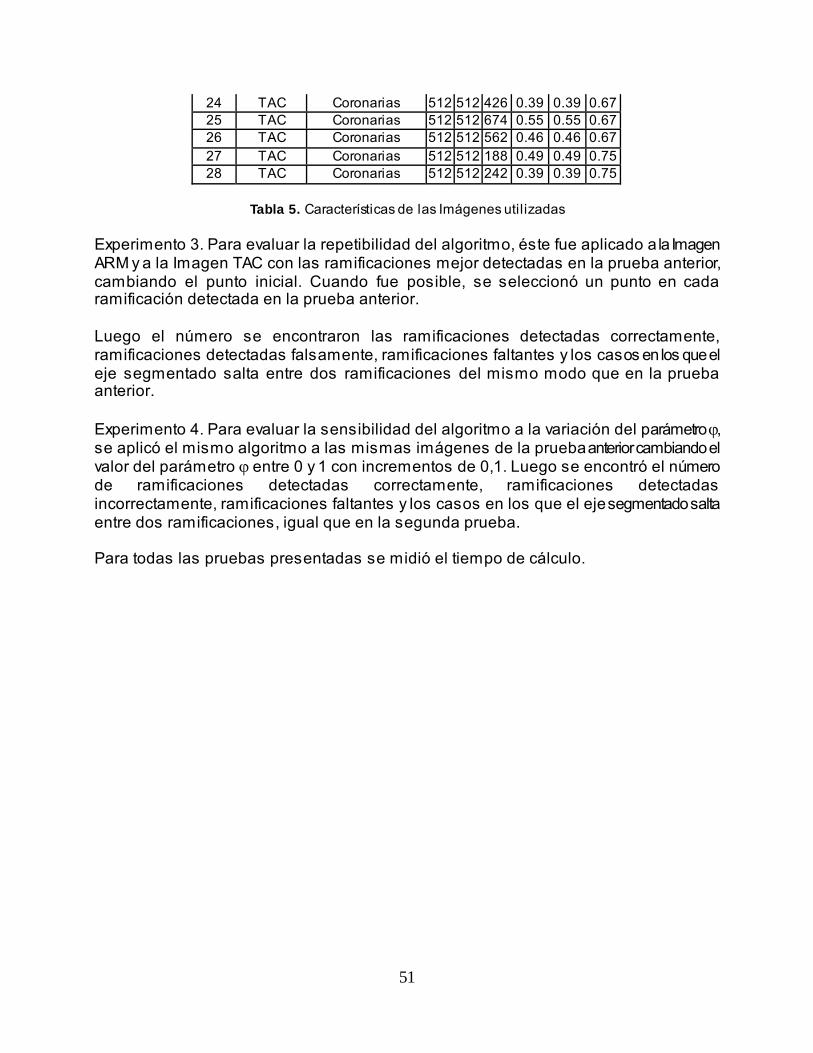
10 ARM Aorta, Renal, Ilíaca512 512 64 0.98 0.98 1.75 11 ARM Aorta, Renal, Ilíaca256 256 64 1.00 1.00 1.00 12 ARM Carótida 512 512 48 0.78 0.78 1.25 13 ARM Coronarias 512 512 80 0.53 0.53 2.00 14 ARM Carótida 512 512 48 0.78 0.78 1.25 15 ARM Carótida 512 512 48 0.78 0.78 1.25 16 ARM Aorta, Renal, Ilíaca256 256 44 0.88 0.88 2.11 17 TAC Coronarias 256 256 152 0.34 0.34 0.75 18 TAC Coronarias 512 512 82 0.39 0.39 0.75 19 TAC Coronarias 512 512 206 0.35 0.35 0.75 20 TAC Coronarias 512 512 356 0.47 0.47 1.00 21 TAC Coronarias 512 512 118 0.55 0.55 1.50 22 TAC Pulmonar 512 512 112 0.97 0.97 5.00 23 TAC Coronarias 512 512 220 0.39 0.39 1.00
51
24 TAC Coronarias 512 512 426 0.39 0.39 0.67 25 TAC Coronarias 512 512 674 0.55 0.55 0.67 26 TAC Coronarias 512 512 562 0.46 0.46 0.67 27 TAC Coronarias 512 512 188 0.49 0.49 0.75 28 TAC Coronarias 512 512 242 0.39 0.39 0.75
Tabla 5. Características de las Imágenes utilizadas
Experimento 3. Para evaluar la repetibilidad del algoritmo, éste fue aplicado a la Imagen ARM y a la Imagen TAC con las ramificaciones mejor detectadas en la prueba anterior, cambiando el punto inicial. Cuando fue posible, se seleccionó un punto en cada ramificación detectada en la prueba anterior. Luego el número se encontraron las ramificaciones detectadas correctamente, ramificaciones detectadas falsamente, ramificaciones faltantes y los casos en los que el eje segmentado salta entre dos ramificaciones del mismo modo que en la prueba anterior. Experimento 4. Para evaluar la sensibilidad del algoritmo a la variación del parámetro ϕ, se aplicó el mismo algoritmo a las mismas imágenes de la prueba anterior cambiando el valor del parámetro ϕ entre 0 y 1 con incrementos de 0,1. Luego se encontró el número de ramificaciones detectadas correctamente, ramificaciones detectadas incorrectamente, ramificaciones faltantes y los casos en los que el eje segmentado salta entre dos ramificaciones, igual que en la segunda prueba. Para todas las pruebas presentadas se midió el tiempo de cálculo.

52
3.2 RESULTADOS Primero presentamos 4 resultados sobresalientes, uno para cada región anatómica considerada: carótida (Fig. 39), pulmonar (Fig. 40), coronarias (Fig. 41) y aorta, renal, Ilíaca (Fig. 42). En cada Imagen presentamos el eje extraído y el volumen segmentado.
Fig. 39. Resultado de segmentación en una imagen ARM de arterias carótidas.

53
Fig. 40. Resultado de segmentación en una imagen TAC pulmonar.
54
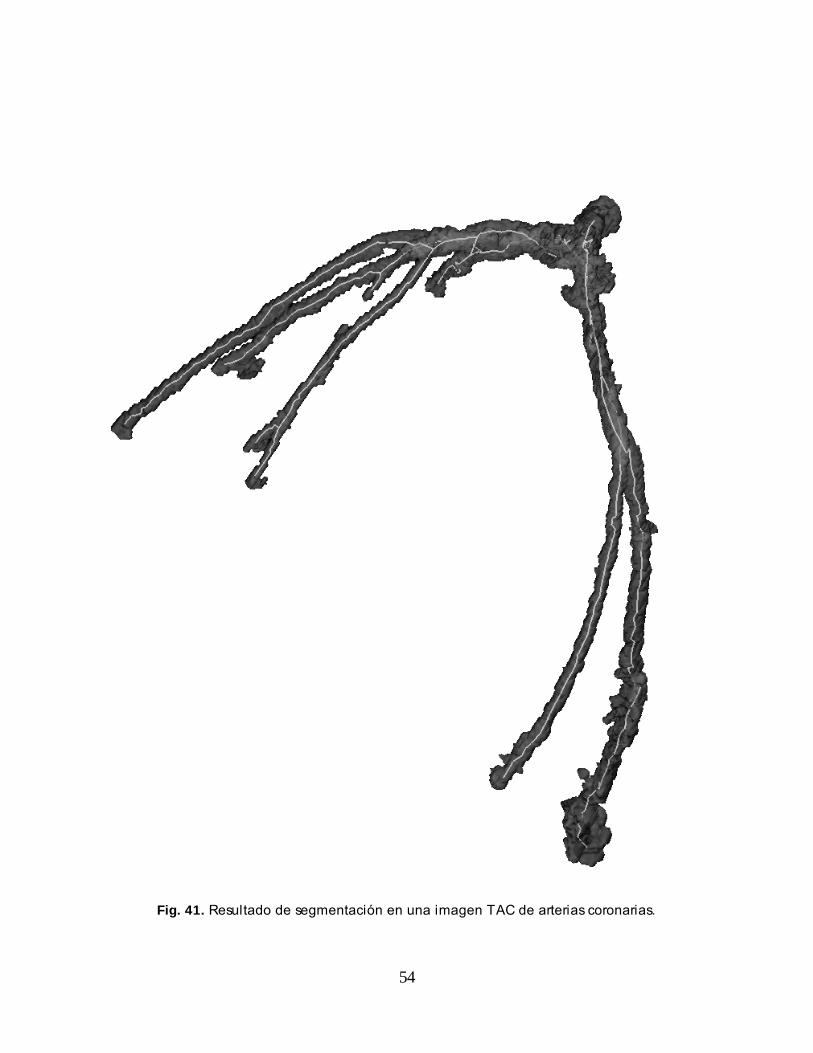
Fig. 41. Resultado de segmentación en una imagen TAC de arterias coronarias.
55
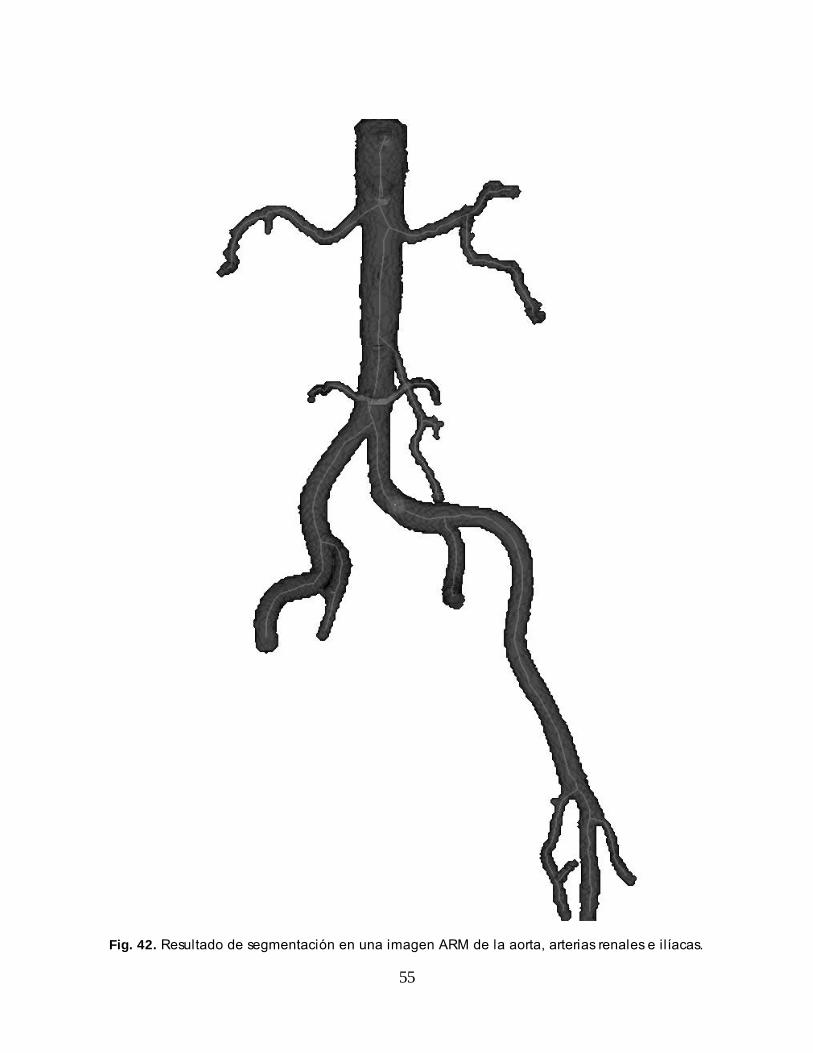
Fig. 42. Resultado de segmentación en una imagen ARM de la aorta, arterias renales e ilíacas.
56
En la Tabla 6 presentamos los resultados del primer experimento. Para cada imagen se indica el número de puntos, la distancia media entre ejes, la desviación estándar de distancia, la distancia máxima y mínima entre ejes.
Imagen Punto Distancia Media (v oxel)
Desv . Est. (v oxel)
Distancia Min. (v oxel)
Distancia Max. (v oxel)
1 149 0.47407 0.31517 0.03361 2.64748 2 47 0.58425 0.58526 0.03228 3.28629 3 156 0.52816 0.34785 0.03767 2.28390 4 153 0.58420 0.36094 0.06543 1.67144 5 169 0.65527 0.41474 0.08152 3.69016 6 180 0.54048 0.37001 0.01278 2.50467 7 75 0.44181 0.18040 0.07850 0.97106 8 67 0.58910 0.40345 0.04994 2.00983 9 141 0.50135 0.26104 0.05384 1.57073
10 149 0.65987 0.43470 0.04833 2.21663 11 125 0.48815 0.29551 0.05626 1.64013 12 168 0.44739 0.30097 0.00978 2.26471 13 123 0.47469 0.25662 0.05593 1.84134 14 118 0.60591 0.61787 0.05232 3.93761 15 160 0.54204 0.32620 0.02196 1.61077 16 45 1.10462 0.50891 0.25768 2.28723
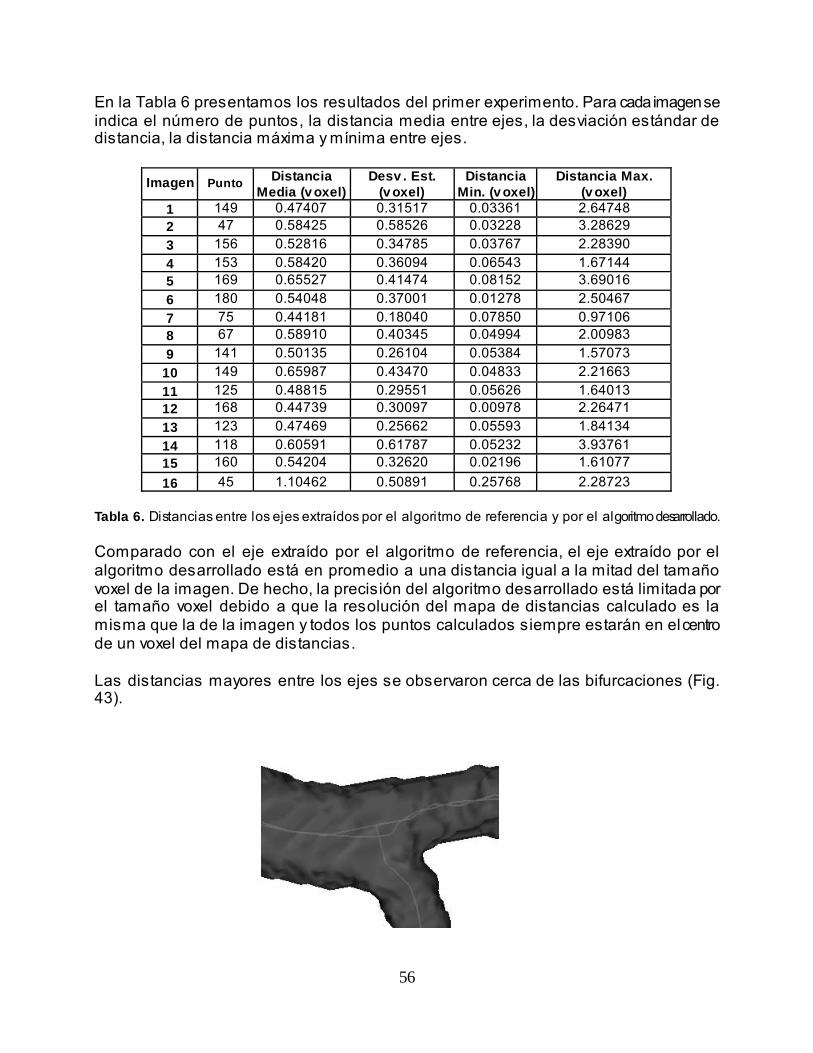
Tabla 6. Distancias entre los ejes extraídos por el algoritmo de referencia y por el algoritmo desarrollado. Comparado con el eje extraído por el algoritmo de referencia, el eje extraído por el algoritmo desarrollado está en promedio a una distancia igual a la mitad del tamaño voxel de la imagen. De hecho, la precisión del algoritmo desarrollado está limitada por el tamaño voxel debido a que la resolución del mapa de distancias calculado es la misma que la de la imagen y todos los puntos calculados siempre estarán en el centro de un voxel del mapa de distancias. Las distancias mayores entre los ejes se observaron cerca de las bifurcaciones (Fig. 43).
57
Fig. 43. En rojo eje extraído por el algoritmo de referencia, en blanco, el eje extraído por el algoritmo desarrollado.
Como el algoritmo de referencia no maneja bifurcaciones, el eje extraído cerca de estas zonas es altamente variable y no debe usarse como referencia. En la Tabla 7 presentamos los resultados del segundo experimento con imágenes ARM.
Imagen Ramificaciones buenas
Ramificacionesfalsas
Ramificaciones faltantes
Cambio de ramificación
1 22 0 1 0 2 11 0 4 0 3 9 0 2 0 4 4 0 4 1 5 16 0 1 0 6 3 0 0 0 7 3 0 2 0 8 2 0 2 0 9 3 0 1 0
10 13 0 3 1 11 8 0 1 0 12 7 0 1 1 13 2 0 1 0 14 8 0 3 1 15 6 0 3 0 16 1 0 0 0
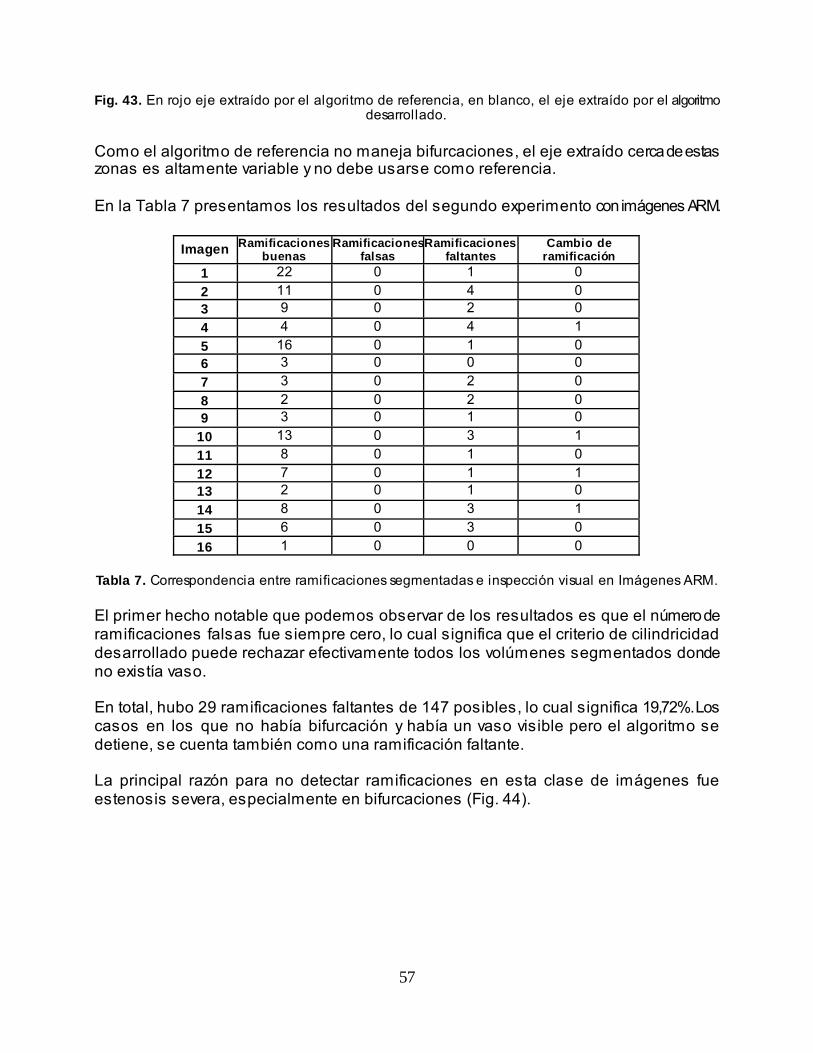
Tabla 7. Correspondencia entre ramificaciones segmentadas e inspección visual en Imágenes ARM. El primer hecho notable que podemos observar de los resultados es que el número de ramificaciones falsas fue siempre cero, lo cual significa que el criterio de cilindricidad desarrollado puede rechazar efectivamente todos los volúmenes segmentados donde no existía vaso. En total, hubo 29 ramificaciones faltantes de 147 posibles, lo cual significa 19,72%. Los casos en los que no había bifurcación y había un vaso visible pero el algoritmo se detiene, se cuenta también como una ramificación faltante. La principal razón para no detectar ramificaciones en esta clase de imágenes fue estenosis severa, especialmente en bifurcaciones (Fig. 44).
58
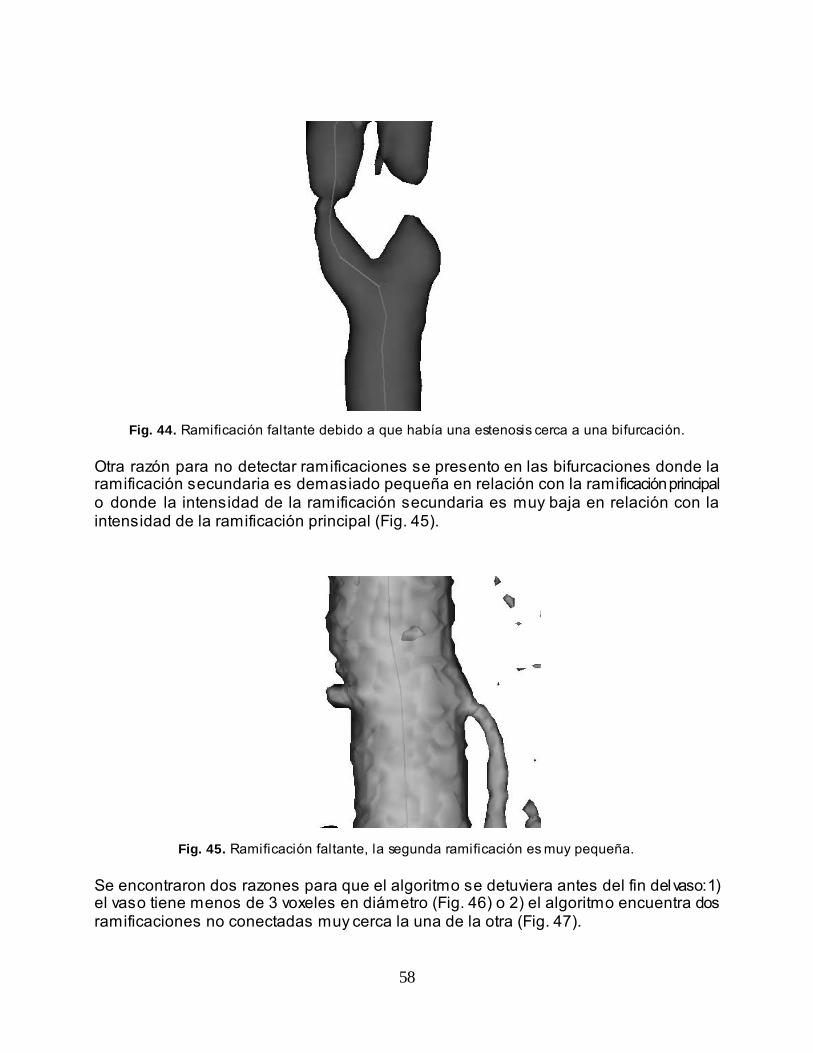
Fig. 44. Ramificación faltante debido a que había una estenosis cerca a una bifurcación. Otra razón para no detectar ramificaciones se presento en las bifurcaciones donde la ramificación secundaria es demasiado pequeña en relación con la ramificación principal o donde la intensidad de la ramificación secundaria es muy baja en relación con la intensidad de la ramificación principal (Fig. 45).
Fig. 45. Ramificación faltante, la segunda ramificación es muy pequeña.
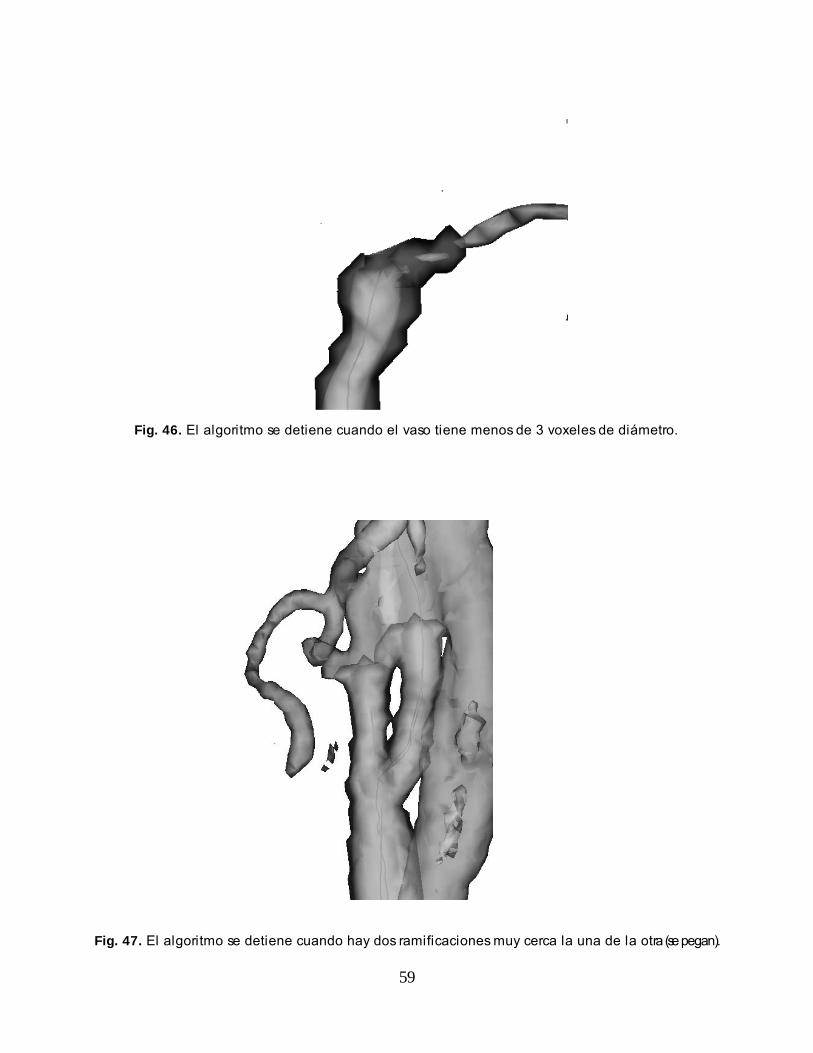
Se encontraron dos razones para que el algoritmo se detuviera antes del fin del vaso: 1) el vaso tiene menos de 3 voxeles en diámetro (Fig. 46) o 2) el algoritmo encuentra dos ramificaciones no conectadas muy cerca la una de la otra (Fig. 47).
59
Fig. 46. El algoritmo se detiene cuando el vaso tiene menos de 3 voxeles de diámetro. Fig. 47. El algoritmo se detiene cuando hay dos ramificaciones muy cerca la una de la otra (se pegan).
60
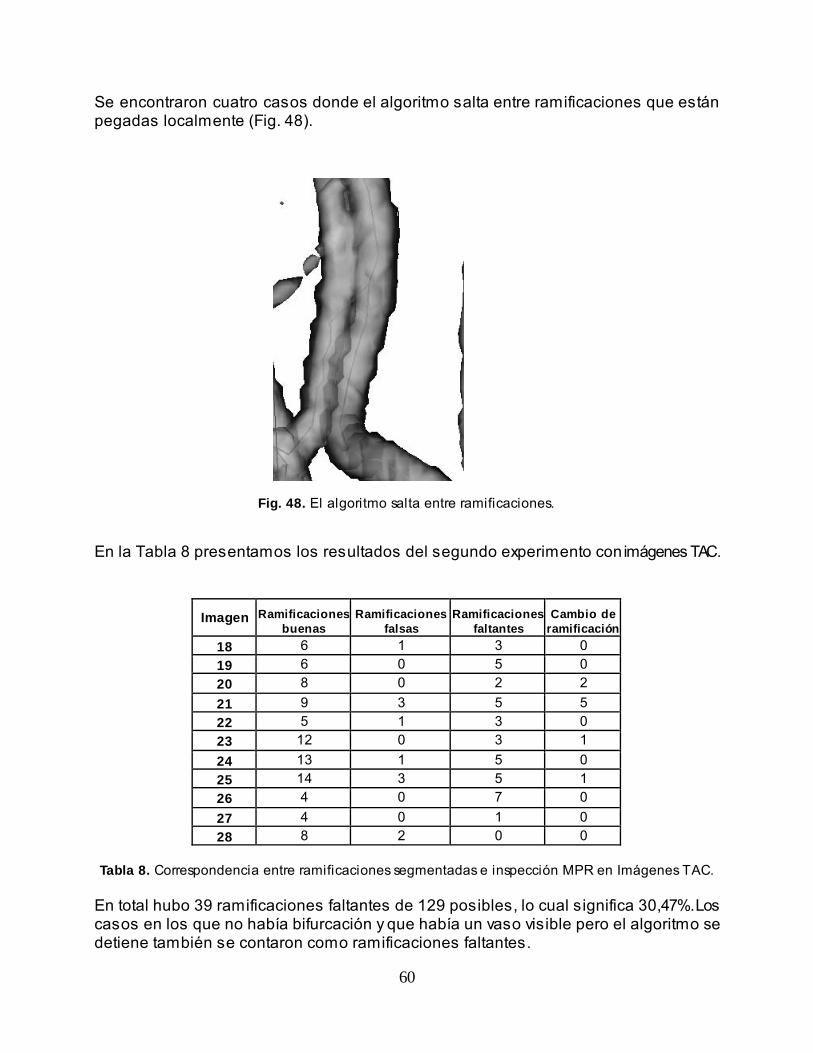
Se encontraron cuatro casos donde el algoritmo salta entre ramificaciones que están pegadas localmente (Fig. 48).
Fig. 48. El algoritmo salta entre ramificaciones.
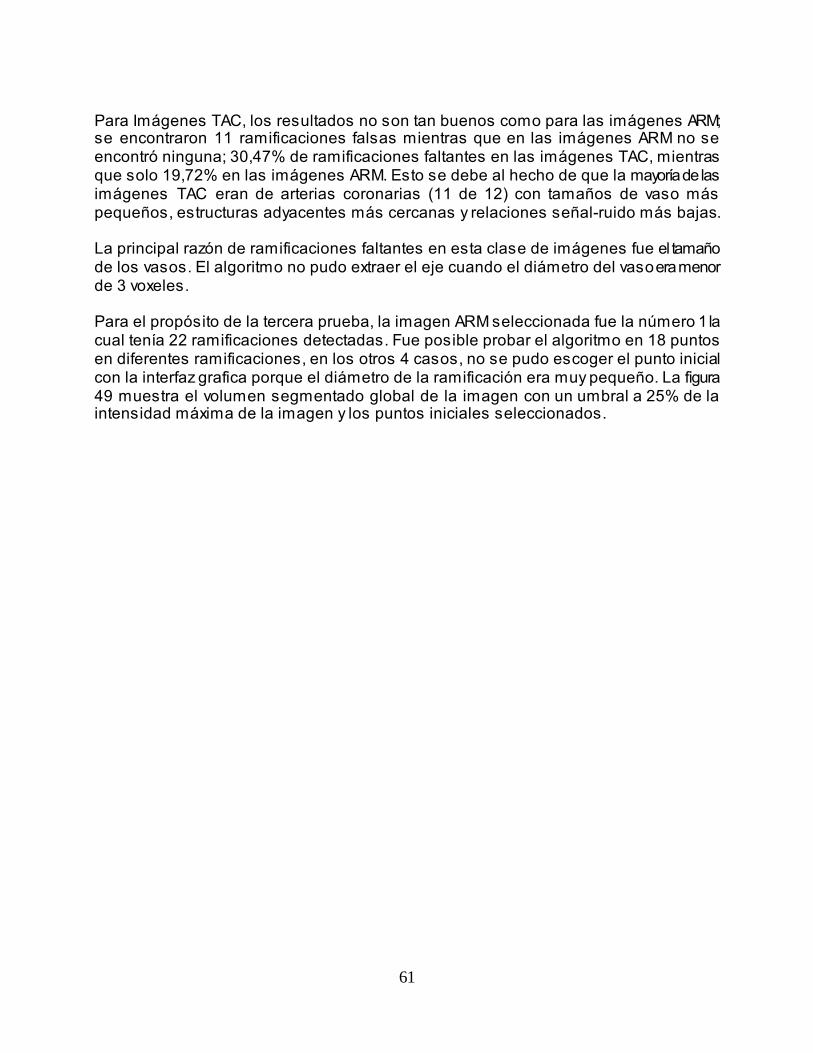
En la Tabla 8 presentamos los resultados del segundo experimento con imágenes TAC.
Imagen Ramificaciones buenas
Ramificaciones falsas
Ramificaciones faltantes
Cambio de ramificación
18 6 1 3 0 19 6 0 5 0 20 8 0 2 2 21 9 3 5 5 22 5 1 3 0 23 12 0 3 1 24 13 1 5 0 25 14 3 5 1 26 4 0 7 0 27 4 0 1 0 28 8 2 0 0
Tabla 8. Correspondencia entre ramificaciones segmentadas e inspección MPR en Imágenes TAC.
En total hubo 39 ramificaciones faltantes de 129 posibles, lo cual significa 30,47%. Los casos en los que no había bifurcación y que había un vaso visible pero el algoritmo se detiene también se contaron como ramificaciones faltantes.
61
Para Imágenes TAC, los resultados no son tan buenos como para las imágenes ARM; se encontraron 11 ramificaciones falsas mientras que en las imágenes ARM no se encontró ninguna; 30,47% de ramificaciones faltantes en las imágenes TAC, mientras que solo 19,72% en las imágenes ARM. Esto se debe al hecho de que la mayoría de las imágenes TAC eran de arterias coronarias (11 de 12) con tamaños de vaso más pequeños, estructuras adyacentes más cercanas y relaciones señal-ruido más bajas. La principal razón de ramificaciones faltantes en esta clase de imágenes fue el tamaño de los vasos. El algoritmo no pudo extraer el eje cuando el diámetro del vaso era menor de 3 voxeles. Para el propósito de la tercera prueba, la imagen ARM seleccionada fue la número 1 la cual tenía 22 ramificaciones detectadas. Fue posible probar el algoritmo en 18 puntos en diferentes ramificaciones, en los otros 4 casos, no se pudo escoger el punto inicial con la interfaz grafica porque el diámetro de la ramificación era muy pequeño. La figura 49 muestra el volumen segmentado global de la imagen con un umbral a 25% de la intensidad máxima de la imagen y los puntos iniciales seleccionados.

62
Fig. 49. Imagen ARM seleccionada para la prueba inicial de sensibilidad de puntos y los puntos iniciales
utilizados.
63
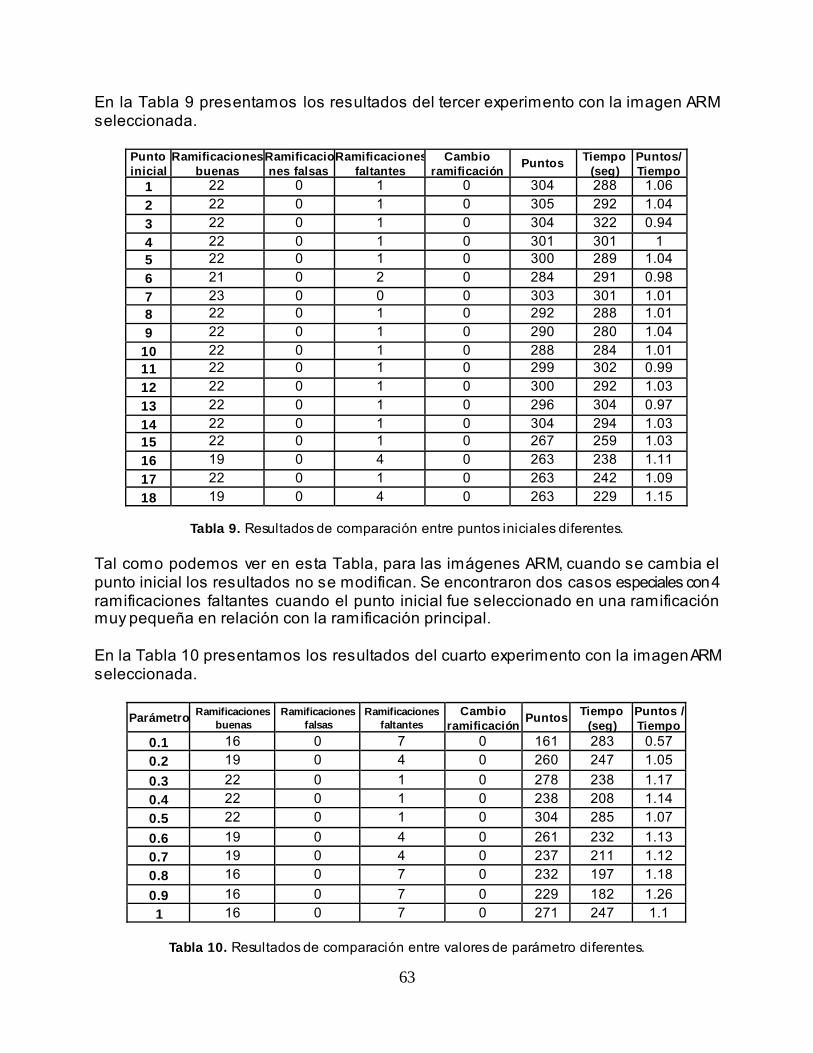
En la Tabla 9 presentamos los resultados del tercer experimento con la imagen ARM seleccionada.
Punto inicial
Ramificaciones buenas
Ramificaciones falsas
Ramificacionesfaltantes
Cambio ramificación Puntos Tiempo
(seg) Puntos/ Tiempo
1 22 0 1 0 304 288 1.06 2 22 0 1 0 305 292 1.04 3 22 0 1 0 304 322 0.94 4 22 0 1 0 301 301 1 5 22 0 1 0 300 289 1.04 6 21 0 2 0 284 291 0.98 7 23 0 0 0 303 301 1.01 8 22 0 1 0 292 288 1.01 9 22 0 1 0 290 280 1.04
10 22 0 1 0 288 284 1.01 11 22 0 1 0 299 302 0.99 12 22 0 1 0 300 292 1.03 13 22 0 1 0 296 304 0.97 14 22 0 1 0 304 294 1.03 15 22 0 1 0 267 259 1.03 16 19 0 4 0 263 238 1.11 17 22 0 1 0 263 242 1.09 18 19 0 4 0 263 229 1.15
Tabla 9. Resultados de comparación entre puntos iniciales diferentes.
Tal como podemos ver en esta Tabla, para las imágenes ARM, cuando se cambia el punto inicial los resultados no se modifican. Se encontraron dos casos especiales con 4 ramificaciones faltantes cuando el punto inicial fue seleccionado en una ramificación muy pequeña en relación con la ramificación principal. En la Tabla 10 presentamos los resultados del cuarto experimento con la imagen ARM seleccionada.
Parámetro Ramificaciones buenas
Ramificaciones falsas
Ramificaciones faltantes
Cambio ramificación Puntos Tiempo
(seg) Puntos / Tiempo
0.1 16 0 7 0 161 283 0.57 0.2 19 0 4 0 260 247 1.05 0.3 22 0 1 0 278 238 1.17 0.4 22 0 1 0 238 208 1.14 0.5 22 0 1 0 304 285 1.07 0.6 19 0 4 0 261 232 1.13 0.7 19 0 4 0 237 211 1.12 0.8 16 0 7 0 232 197 1.18 0.9 16 0 7 0 229 182 1.26 1 16 0 7 0 271 247 1.1
Tabla 10. Resultados de comparación entre valores de parámetro diferentes.

64
Tal como podemos observar de la tabla anterior, como se esperaba, cambiar el valor del parámetro ϕ no cambia los resultados en más de un 40%. Los mejores resultados se encontraron para los valores entre 0,3 y 0,5. Para los propósitos de la tercera prueba en la imagen TAC, la imagen seleccionada fue el número 23 que tenía 12 ramificaciones bien detectadas, ninguna ramificación falsa, 3 ramificaciones faltantes y 1 cambio de ramificación. No fue posible probar el algoritmo en 12 puntos en diferentes ramificaciones. No es posible mostrar una representación de superficie de un árbol vascular en la imagen seleccionada porque en imágenes coronarias el número de estructuras segmentadas con un umbral global es muy alto y es imposible diferenciar entre vaso y otras estructuras. En la Tabla 11 presentamos los resultados del tercer experimento con la imagen TAC seleccionada.
PuntoRamificaciones buenas
Ramificaciones falsas
Ramificaciones faltantes Cambio ramificación Puntos Tiempo
(seg) Puntos / Tiempo
1 12 0 3 1 372 286 1.3 2 10 1 5 1 349 270 1.29 3 10 1 5 1 349 271 1.29 4 10 1 5 1 356 279 1.28 5 7 1 8 0 289 248 1.17 6 8 1 7 1 319 322 0.99 7 8 1 7 1 290 297 0.98 8 4 0 11 1 81 175 0.46 9 8 1 7 1 292 295 0.99
10 8 1 7 1 289 294 0.98 11 10 1 5 1 348 265 1.31 12 4 0 11 0 64 111 0.58 Tabla 11. Resultados de comparación entre puntos iniciales diferentes en la imagen TAC seleccionada. Los resultados muestran que el algoritmo es sensible a la selección del punto inicial en imágenes coronarias TAC. Cuando el punto inicial seleccionado reside dentro de una ramificación secundaria con un diámetro muy pequeño en relación con el vaso principal, el algoritmo no puede extraer el eje del vaso principal debido a que la zona de bifurcación no es validada como un vaso.

65
En la Tabla 12 presentamos los resultados del cuarto experimento con la imagen TAC seleccionada.
Parámetro Ramificaciones buenas
Ramificaciones falsas
Ramificaciones faltantes
Cambio ramificación Puntos Tiempo
(seg) Puntos / Tiempo
0.1 15 4 0 3 291 965 0.3 0.2 15 2 0 1 341 895 0.38 0.3 11 1 4 1 275 443 0.62 0.4 5 0 10 0 136 224 0.61 0.5 12 0 3 1 372 286 1.3 0.6 5 0 10 0 107 215 0.5 0.7 1 0 14 0 114 84 1.36 0.8 9 0 6 0 318 289 1.1 0.9 5 0 10 0 213 156 1.37
Tabla 12. Resultados de comparación entre valores de parámetro diferentes.
El algoritmo es altamente sensible al valor de parámetro ϕ en imágenes TAC de arterias coronarias. Cuando el valor de parámetro es muy pequeño, las estructuras adyacentes no se eliminan y por lo tanto, el número de ramificaciones falsas y los cambios de ramificación son más altos. Cuando el valor de parámetro es muy alto, las bifurcaciones son consideradas como estructuras adyacentes y son eliminadas. Por lo tanto el número de ramificaciones bien detectadas es más bajo. En la Tabla 13 presentamos el número de puntos extraídos y el tiempo de calculo para todas las imágenes. El algoritmo se probó en un computador Pentium 4 1.8GHz con 1GB RAM.
Imagen Puntos Tiempo (seg)
Puntos / Tiempo (seg)
1 274 278 0.99 2 42 82 0.51 3 123 139 0.88 4 75 64 1.17 5 156 180 0.87 6 122 57 2.14 7 43 48 0.9 8 35 14 2.5 9 181 128 1.41
10 235 195 1.21 11 106 116 0.91 12 242 204 1.19 13 56 20 2.8 14 159 101 1.57 15 113 97 1.16
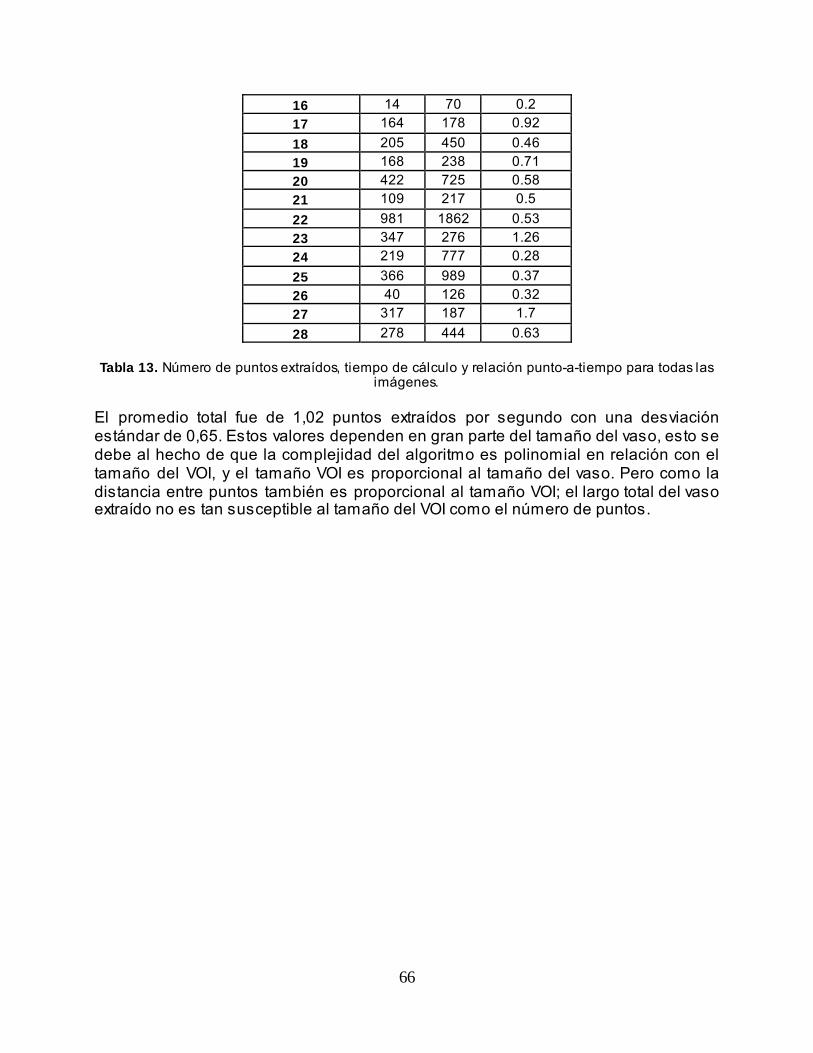
66
16 14 70 0.2 17 164 178 0.92 18 205 450 0.46 19 168 238 0.71 20 422 725 0.58 21 109 217 0.5 22 981 1862 0.53 23 347 276 1.26 24 219 777 0.28 25 366 989 0.37 26 40 126 0.32 27 317 187 1.7 28 278 444 0.63
Tabla 13. Número de puntos extraídos, tiempo de cálculo y relación punto-a-tiempo para todas las
imágenes. El promedio total fue de 1,02 puntos extraídos por segundo con una desviación estándar de 0,65. Estos valores dependen en gran parte del tamaño del vaso, esto se debe al hecho de que la complejidad del algoritmo es polinomial en relación con el tamaño del VOI, y el tamaño VOI es proporcional al tamaño del vaso. Pero como la distancia entre puntos también es proporcional al tamaño VOI; el largo total del vaso extraído no es tan susceptible al tamaño del VOI como el número de puntos.
67
CONCLUSIONES Y DISCUSIÓN Se desarrolló un algoritmo capaz de extraer los ejes y la forma aproximada del lumen vascular del árbol vascular a partir de un solo punto inicial. La estructura general del algoritmo fue diseñada como una plataforma de desarrollo para ser reutilizada en los problemas de segmentación vascular. [21] hace referencia a otra implementación que utiliza esta plataforma de desarrollo. El algoritmo de extracción se basa en un método de segmentación desarrollado especialmente para eliminar las estructuras hiperintensas alrededor de una estructura cilíndrica. Igualmente se propuso un nuevo criterio de cilindricidad tomando como base un modelo que incluya bifurcaciones y cambios en el tamaño de los vasos. Según nuestra primera evaluación en imágenes TAC y ARM, el algoritmo detecta y maneja de manera efectiva las bifurcaciones cuando las ramificaciones secundarias tienen el tamaño y la intensidad lo suficientemente grandes para que sean segmentados localmente por el método de segmentación desarrollado. En imágenes ARM, se encontró el 80,28% de las ramas y en las imágenes TAC se encontró el 69,53%. El algoritmo puede reiniciarse sobre los puntos dentro de las ramificaciones faltantes y el árbol vascular de la imagen total puede extraerse con unos pocos puntos iniciales. En comparación con el algoritmo de referencia, la distancia promedio entre ejes fue menor que el tamaño voxel. En las bifurcaciones se observaron las mayores distancias entre los ejes. Sin embargo, el algoritmo de referencia no maneja bifurcaciones y realmente debe usarse como referencia únicamente en zonas alejadas de las ramificaciones. El algoritmo es más rápido que los algoritmos de referencia basados en el análisis de matriz hessiana pero es más lento que los algoritmos de referencia basados en el análisis de momentos. En general, una imagen puede ser procesada en menos de 5 minutos lo cual es lo suficientemente rápido para la práctica diaria de un médico. El algoritmo es sensible al valor del parámetro ϕ tanto en imágenes TAC como ARM debido a que el método de segmentación se basa en un modelo cilíndrico de los vasos controlado por el valor del parámetro. Cuando el valor del parámetro es alto, el volumen segmentado no incluye las estructuras hiper-intensas cercanas pero las bifurcaciones son eliminadas; cuando el valor del parámetro es bajo, el volumen segmentado incluye las bifurcaciones pero también incluye las estructuras hiper-intensas cerca del vaso. Se encontró que el algoritmo también es sensible al punto inicial cuando el punto inicial queda en una ramificación secundaria y ésta es demasiado pequeña con respecto a la

68
ramificación principal. Pero este no es un problema real porque se puede sugerir al usuario que siempre escoja un punto dentro de la ramificación principal. Si se cambia el criterio de cilindricidad para incluir la clase de estructuras encontradas en bifurcaciones cuando el algoritmo está pasando de una ramificación pequeña a una más grande, podría resultar en un número más alto de ramificaciones falsas.

69
TRABAJO A FUTURO Y PERSPECTIVAS
Aunque son muchos los aportes de este trabajo también son muchos los nuevos campos de acción que se desprenden del mismo. Se propone continuar el trabajo en varios frentes. Primero, se debe trabajar en eliminar la sensibilidad del algoritmo al parámetro ϕ, para tal fin se debe desarrollar un criterio para determinar la calidad de la segmentación y así poder comparar el resultado de diferentes aplicaciones del algoritmo para diferentes valores de ϕ. Durante el transcurso del proyecto ya se implemento una versión del programa que en cada paso de la iteración explora diferentes valores de ϕ en un rango entre 0 y 1, pero no se pudo desarrollar un criterio de comparación de resultados satisfactorio. Segundo, se debe trabajar en desarrollar modelos alternativos para el procesamiento de imágenes con patologías severas. En estos casos el criterio de cilindricidad desarrollado en este proyecto falla al tratar de validar el árbol vascular. Cabe mencionar que en este momento se encuentra en curso el trabajo de tesis de postgrado de Diego Cantor centrado en la segmentación de imágenes con estenosis severas. Además de este trabajo en curso también se debe trabajar en la segmentación de imágenes con aneurismas severos ya que la problemática es diferente a al de las estenosis y los modelos desarrollados por el trabajo de Diego Cantor no aplican a este problema. Tercero, se propone trabajar sobre la misma estructura general del algoritmo desarrollado, implementando cada una de las etapas con principios matemáticos diferentes a los utilizados en este trabajo. Son de especial interés los filtros multi-escala derivativos aplicados localmente en lugar de globalmente como lo hacen los artículos referenciados en la bibliografía. Ola aplicación local de estos filtros reducirá sustancialmente el tiempo de calculo sin modificar los buenos resultados ya reportados. También se propone el desarrollo de algoritmos de segmentación basados en LevelSets para ser utilizados localmente. La utilización de un algoritmo de segmentación basado en LevelSets en lugar de un algoritmo basado en K-Means puede ayudar a resolver el problema de la sensibilidad del algoritmo al parámetro ϕ. Por ultimo se propone utilizar combinaciones de principios matemáticos en un mismo algoritmo. Esta combinación permitira resolver los problemas de un principio con las ventajas de los otros.

70
BIBLIOGRAFIA 1. Flasque N., Devinges M., Constants J., Revenu M., 'Aquisition, Segmentation and
Tracking of the Cerebral Vascular Tree on 3D Magneic Resonance Angiography Imágenes'. Medical IMAGEN Analysis, No. 3, 2001, pp. 173-183.
2. Flasque N., 'Détection et représentation de structures tubulaires 3D. Application à l'angiographie par résonance magnétique', PhD thesis, Université de Caen, 2001.
3. Descoteaux M. , Collins L. , Siddiqi K., 'Geometric Flows for Segmenting Vasculature in MRI:Theory and Validation'. Medical IMAGEN Computing and Computer Assisted Intervention (MICCAI) 2004, 500-507.
4. Florin C., Moreau-Gobard R., Williams J.. 'Automatic Heart Peripheral Vessels Segmentation Based on a Normal MIP Ray Casting Technique'. In Medical IMAGEN Computing and Computer-Assisted Intervention (MICCAI), Vol. LNCS 3216 (1) (Eds, Barillot, C., Haynor, D. R. and P., H.) Springer Verlag, St Malo, France, pp. 483-490.
5. H.A.F. Gratama van Andel, E. Meijering, A. van der Lugt, H.A. Vrooman, and R. Stokking. 'VAMPIRE: Improved Method for Automated Center Lumen Line Definition in Atherosclerotic Carótida Arteries in CTA Data'. In Medical IMAGEN Computing and Computer-Assisted Intervention (MICCAI), Vol. LNCS 3216 (1) (Eds, Barillot, C., Haynor, D. R. and P., H.) Springer Verlag, St Malo, France, pp. 525-532.
6. Manniesing R., Niessen W. 'Local Speed Functions in Level Set Based Vessel Segmentation'. In Medical IMAGEN Computing and Computer-Assisted Intervention (MICCAI), Vol. LNCS 3216 (1) (Eds, Barillot, C., Haynor, D. R. and P., H.) Springer Verlag, St Malo, France, pp. 475-482.
7. Frangi, A. F., Niessen, W. J., Vincken, K. L. and Viergever, M. A. (1998): 'Multiscale vessel enhancement filtering'. In MICCAI'98 - Medical IMAGEN Computing and Computer-Assisted Intervention, Vol. 1496 (Eds, Wells, W. M., Colchester, A. and Delp, S.) Berlin : Springer, Cambridge, MA, USA, pp. 130-137.
8. Wink, O., Niessen, W. J. and Viergever, M. A. (2004): 'Multiscale vessel tracking'. IEEE Trans. Med. Imaging, 23, 130-133.
9. Wink, O., Frangi, A. F., Verdonck, B., Viergever, M. A. and Niessen, W. J. (2002): '3D MRA coronary axis determination using a minimum cost path approach'. Magnetic Resonance in Medicine, 47, 1169-1175.
10. Wink, O., Niessen, W. J., Verdonck, B. and Viergever, M. A. (2001): 'Vessel axis determination using wave front propagation analysis'. In MICCAI'2001 - Medical IMAGEN Computing and Computer-Assisted Intervention, Vol. 2208 (Eds, Niessen, W. J. and Viergever, M. A.) Springer, Utrecht, The Netherlands, pp. 845-853.
11. Tizon X., Smedby Ö., 'Segmentation with Grat-Scale Connectedness can Separate Arteries and Veins in MRA'. Journal of Magnetic Resonance Imaging 2002.
12. Wörz, S. and Rohr, K. (2004): 'A new 3D parametric intensity model for accurate segmentation and quantification of human vessels'. In Medical IMAGEN Computing and Computer-Assisted Intervention (MICCAI), Vol. LNCS 3216 (1) (Eds, Barillot, C., Haynor, D. R. and P., H.) Springer Verlag, St Malo, France, pp. 491-499.
71
13. Hernández-Hoyos M, Orkisz M, Puech P, Mansard-Desbleds C, Douek PC, Magnin I.E. 'Computer assisted analysis of three-dimensional MR angiograms'. RadioGraphics 2002;22:421-436.
14. A. Vasilevskyi and K. Siddiqi. 'Flux maximizing geometric flows'. IEEE Transactions on Pattern Analysis and Machine Intelligence, 24(12):1–14, 2002.
15. Hernández-Hoyos M, Orkisz M, Roux J. P., Douek P. 'Inertia-Based Vessel Axis Extraction and Stenosis Quantification in 3D MRE Imágenes'. Computer Assited Radiology and Surgery, Paris, France, June 1999, 189-193.
16. T. Saito and J.I. Toriwaki. 'New algorithms for Euclidean distance transformations of an n-dimensional digitised picture with applications'. Pattern Recognition, 27(11). pp. 1551--1565, 1994.
17. N. Otsu, 'A threshold selection method from gray-level histograms', IEEE Transations Systems, Man. and Cybernetics, SMC 9, Vol.1, 1979, 63--66.
18. J. MacQueen.'Some methods for classification and analysis of multivariate observations'. In L. M. LeCam and J. Neyman, editors, Proceedings Fifth Berkeley Symposium on Math. Stat. and Prob., pages 281--297. University of California Press, 1967.
19. Antiga L, Ene-Iordache B, Remuzzi G, Remuzzi A. 'Automatic generation of glomerular capillary topological organization'. Microvascular Research 2001;62:346-354.
20. Carrillo J, Orkisz M. Hernández M ‘Extraction of 3D Vascular Tree Skeletons Based on the Analysis of Connected Components Evolution.’. In: Computer Analysis of Images and Patterns: 11th International Conference, CAIP 2005, Versailles, France, September 5-8, 2005