“Estudio Numérico Experimental de una Viga Agrietada”
49
Universidad Austral de Chile Facultad de Ciencias de la Ingeniería Escuela de Ingeniería Naval “Estudio Numérico Experimental de una Viga Agrietada” Tesis para optar al Título de: Ingeniero Naval Mención: Arquitectura Naval Profesor Patrocinante: Sr. Héctor Legue L. Ingeniero Civil Mecánico MSc. Ingeniería Oceánica CARLOS PATRICIO PARRA CONTRERAS VALDIVIA - CHILE - 2010 -
Transcript of “Estudio Numérico Experimental de una Viga Agrietada”

Universidad Austral de Chile Facultad de Ciencias de la Ingeniería
Escuela de Ingeniería Naval
“Estudio Numérico Experimental de una Viga Agrietada”
Tesis para optar al Título de:
Ingeniero Naval
Mención: Arquitectura Naval
Profesor Patrocinante:
Sr. Héctor Legue L.
Ingeniero Civil Mecánico
MSc. Ingeniería Oceánica
CARLOS PATRICIO PARRA CONTRERAS
VALDIVIA - CHILE
- 2010 -



INDICE Índice I Resumen II CAPITULO I: INTRODUCCION……………………………………………….. 1 1.1 Análisis Modal………………………………………………………………. 1 1.2 Análisis Modal Experimental………………………………………………… 1 1.3 Grietas………………………………………………………………………... 2 1.4 Identificación de daño en vigas………………………………………………. 2 1.5 Objetivos……………………………………………………………………... 3 1.6 Revisión Bibliográfica……………………………………………………….. 3 CAPITULO II: MARCO TEORICO…………………………………………… 4 2.1 ¿Qué es análisis Modal?.................................................................................... 4 2.2 Análisis Modal Experimental………………………………………………… 5 2.3 Visión General del Análisis modal Experimental……………………………. 5 2.3.1 Teoría del Análisis Modal……………………………………………….. 6 2.3.2 Métodos de Análisis Modal experimental………………………………. 6 2.3.3 Adquisición de datos modales…………………………………………… 6 2.3.4 Estimación de parámetros modales……………………………………… 6 2.3.5 Presentación o validación de datos modales…………………………….. 6 2.4 Desarrollo Teórico del Análisis Modal………………………………………. 7 2.4.1 Introducción……………………………………………………………... 7 2.4.2 Supuestos Básicos del análisis modal…………………………………… 7 2.4.3 Sistemas con un gado de libertad 1GDL………………………………… 7 2.4.4 Dominio del tiempo: Función de respuesta al impulso………………….. 9 2.4.5 Dominio de frecuencia: Función de respuesta de frecuencia……………. 10 2.4.6 Dominio de Laplace: Función de Transferencia………………………… 11 2.4.7 Sistemas con múltiple grado de libertad………………………………… 12 2.5 Teoría de la vibración por flexión de vigas uniformes………………………. 13 2.6 Fundamentos del Análisis Modal Experimental……………………………... 18 2.6.1 Transformada Rápida de Fourier………………………………………... 18 2.6.2 La Función de Respuesta en Frecuencia FRF…………………………… 19 CAPITULO III: Análisis Numérico – Experimental……………………………. 20 3.1 Introducción………………………………………………………………….. 20 3.2 Análisis en MEF……………………………………………………………… 20 3.2.1 Definición del elemento a utilizar……………………………………….. 20 3.2.2 Modelación de la Viga en Voladizo……………………………………... 23 3.2.3 Modelación de la Grieta…………………………………………………. 23 3.3 Análisis Experimental………………………………………………………... 27 3.3.1 Introducción……………………………………………………………... 27 3.3.2 Sistema ideal para un Análisis Modal Experimental……………………. 28 3.3.3 Prueba de Impacto (Bump Test)………………………………………… 28 3.3.4 Sistema Utilizado……………………………………………………….. 29 3.3.5 Descripción del método utilizado……………………………………….. 29 3.3.6 Validación del método utilizado………………………………………… 30 3.3.7 Obtención de los modos de vibrar……………………………………….. 32 3.3.8 Resultados Obtenidos……………………………………………………. 34 3.3.9 Modelación de la Grieta experimental…………………………………... 37 CAPITULO IV: Resultados……………………………………………………… 38 4.1 Análisis del Primer Modo de vibrar…………………………………………. 39 4.2 Análisis del Segundo Modo de vibrar………………………………………... 39 4.3 Análisis del Tercer modo de vibrar…………………………………………... 40 CAPITULO V: Conclusiones……………………………………………………... 42 BIBLIOGRAFIA……………………………………………………………………. 43

RESUMEN
En el presente trabajo se analizará la influencia que tiene el avance de una grieta de contorno en
una viga en voladizo, detectando los cambios en las frecuencias de las formas modales de vibrar
en flexión.
Para esto se utilizarán dos métodos, a través de una modelación de elementos finitos MEF y en
forma experimental. Luego se compararán estos dos métodos para analizar la diferencia entre
estos resultados.
Con estos resultados se evaluará la posibilidad de efectuar análisis de grietas en vigas a través de
la detección de cambios en las frecuencias de los modos de vibrar con el método de Prueba de
Impacto (Bump Test).
ABSTRACT
In the present work, the influence that has the advance o fan edge crack in a cantilever Beam will
be examined, detecting the changes in the frecuencies of the modes of vibration in flexion.
Two methods, through a modelation of finite elements method FEM and in experimental form
will de utilized. Then these two methods to examine the difference between these results will be
compared.
The posibility to make analysis of crack in beams through the detection of changes in the
frecuencies of the modes of vobration, through Bump Testing, will be evaluated.

AGRADECIMIENTOS
A Loreto, por su completo apoyo en este último paso.
También quiero agradecer a todos los profesores del Instituto de Cs. Navales y Marítimas que
mantienen la enseñanza de la Ingeniería Naval en Chile.
DEDICADO
…a mis padres.

1
Capitulo I: Introducción
1.1 Análisis Modal
Durante las pasadas tres décadas, el análisis modal se ha convertido en una de las principales
tecnologías de búsqueda para determinar, mejorar y optimizar características dinámicas al diseñar
estructuras. No sólo es reconocido en la ingeniería mecánica y aeronáutica, el análisis modal
también ha descubierto profundas aplicaciones para las estructuras civiles y edificios, problemas
biomecánicos, estructuras espaciales, instrumentos acústicos, el transporte y las plantas nucleares.
Para apreciar su significado en el área moderna de la ingeniería y su potencial para la tecnología
y ciencia futura, es apropiado tener en cuenta una cierta cantidad de los hechos de fondo que
ayudarán a subrayar esta tecnología única.
La mayoría de las estructuras vibran debido a fuerzas que causan las vibraciones. A menudo las
vibraciones deben ser investigadas no sólo si tienen algún problema inmediato, sino que también
para establecer patrones de buen funcionamiento. Cualquiera que sea la razón, se necesita
cuantificar la respuesta estructural de alguna manera para que de esa forma se pueda evaluar la
implicancia en factores como el comportamiento y la fatiga del material.
Ante este panorama es indudable que el uso de softwares de modelación mediante el método de
elementos finitos MEF se hace cada vez más común y por lo mismo se tiende a pensar que estos
modelos son una fiel copia de la realidad, es por esto que se hace necesario realizar
comparaciones entre modelos MEF y modelos reales experimentales para poder corroborar su
exactitud o establecer fortalezas y debilidades de estos softwares.
1.2 Análisis Modal experimental
El análisis modal experimental es el proceso de determinar los parámetros modales como las
frecuencias, amortiguación y modos de vibrar de un sistema lineal e invariante en el tiempo a
través de una aproximación experimental. Los parámetros modales pueden ser determinados a
través de métodos analíticos, como el análisis de elementos finitos y una de las razones comunes
para el análisis modal experimental es la verificación u/o corrección de los resultados analíticos.
A menudo, sin embargo, un modelo analítico no existe y los parámetros modales determinados
experimentalmente sirven de modelo (base) para futuras evaluaciones como por ejemplo
modificaciones estructurales. Generalmente, un análisis modal experimental es usado para
explicar un problema o comportamiento dinámico, que no es obvio o intuitivo, modelos analíticos
o experiencias previas similares. Es importante recordar que la mayoría de los problemas de

2
vibración son funciones de ambos, las funciones de fuerza (o condiciones iniciales) y las
características del sistema descritas por los parámetros modales.
1.3 Grietas
Las grietas se presentan en estructuras debido a variadas razones. La presencia de una grieta no
solo podría producir variación en la rigidez, también podría afectar el comportamiento mecánico
de la estructura completa en forma considerable. Las grietas presentes en componentes
vibratorios o rotatorios podrían llevar a una falla catastrófica. Por esta razón hay una necesidad
de entender la dinámica de estructuras agrietadas. Las características de la vibración de una
estructura agrietada puede ser útil para una detección “en línea” (Monitoreo Continuo) de grietas
sin desmantelar la estructura (Prueba no destructiva). En particular, las frecuencias naturales y
formas de modo de vigas agrietadas pueden proveer, dentro de lo considerable, una apreciación
del daño.
1.4 Identificación de daño en vigas
Las vigas son elementos de construcción muy importantes debido a su extenso uso en la
Ingeniería y obviamente en la Construcción Naval. También, es importante conocer el
comportamiento dinámico de vigas con defectos. Por consiguiente, este tema es estudiado por
investigadores, ya que resulta útil para identificar la ubicación y la magnitud de defectos.
En ingeniería, se sobreentiende intuitivamente al daño como una imperfección o deterioro de la
función y condición de trabajo de una estructura o máquina. Por lo tanto, entendemos por
detección de daño a un proceso de localización de averías que describe la presencia del mismo.
La detección del daño constituye el objetivo primario en un problema más general que significa
lograr su identificación. Un análisis posterior y niveles superiores de esa identificación incluyen:
severidad y clasificación del daño, localización del daño, y finalmente, predicción de vida
remanente en servicio de la estructura y su posible interrupción.

3
1.5 Objetivos
Utilizar un equipo de análisis de vibraciones en máquinas para obtener características modales de
una estructura simple a través de un método llamado Prueba de Impacto (Bump Test).
Entender como la información modal es extraída desde las mediciones de vibración a través de un
equipo de vibraciones que no realiza análisis modales.
Analizar como cambia el comportamiento dinámico de una viga en voladizo a medida que crece
una grieta de contorno.
Comparar los resultados obtenidos a través de un modelo analítico y uno experimental para poder
establecer la exactitud de los resultados que se obtienen a través del método de elementos finitos.
Establecer si es posible utilizar el método Prueba de Impacto para el análisis de daño en vigas.
1.6 Revisión bibliográfica
Las formas modales teóricas, en las cuales se basará este estudio, provienen de la teoría de la
flexión normalmente aplicada en ingeniería. Este método de análisis es conocido como teoría de
Bernoulli-Euler, la cual supone que una sección transversal plana de una viga permanece plana
durante deformaciones por flexión.
Para realizar la modelación de la grieta mediante el método de elementos finitos, se utilizó un
diseño utilizado en diversos trabajos de estudio de concentración de tensiones alrededor de la
grieta en viga sometida a esfuerzo de Tensión.

4
CAPITULO II: MARCO TEORICO
2.1 ¿Qué es el análisis Modal?
El análisis modal es el proceso de determinación de los parámetros dinámicos inherentes de un
sistema en forma de frecuencias naturales, factores de amortiguamiento y las formas de modos, y
se formula un modelo matemático para este comportamiento dinámico. El modelo matemático es
referido al modelo modal del sistema y de la información de las características que nosotros
sabemos es la información modal.
La dinámica de la estructura es físicamente descompuesta por frecuencia y posición. Esto se hace
claramente evidente por la solución analítica de las ecuaciones diferenciales parciales de un
sistema continuo de vigas. El análisis modal se basa en el hecho de las respuestas de vibración de
un sistema dinámico lineal que no varía con el tiempo, esto se puede expresar como la
combinación lineal de movimientos simples harmónicos, los cuales son llamados modos
naturales de la vibración. Este concepto es semejante a la combinación de Fourier de las ondas de
senos y cosenos para representar una complicada forma de onda. Los modos naturales de la
vibración son inherentes a un sistema dinámico y completamente determinados por las
propiedades físicas (masa, rigidez, amortiguamiento) y por la distribución espacial. Cada modelo
es descrito en términos de cada parámetro modal: frecuencia natural, el factor de
amortiguamiento modal y la trayectoria de desplazamiento llamado forma modal (mode shape).
Cada una corresponde a una frecuencia natural. El grado de participación de cada modo natural
de vibración es determinado por las propiedades de excitación (fuente) y por los modos de forma
del sistema.
El análisis modal se basa en técnicas tanto experimentales como la teóricas. El análisis modal
teórico recae en el modelo físico del sistema dinámico abarcando las propiedades como masa,
rigidez y amortiguamiento. Estas propiedades se obtienen de las ecuaciones diferenciales
parciales. Un modelo físico real comprendería las propiedades de masa, rigidez y
amortiguamiento de forma de la distribución espacial, esto es llamado matriz de masa, rigidez y
amortiguamiento. Esta matriz es incorporada por una ecuación diferencial normal de movimiento.
El principio de superposición en un sistema lineal dinámico nos permite transformar el problema
en un sistema lineal más fácil de comprender. Esta solución es dada por los datos modales del
sistema. Los nuevos software de análisis de elementos finitos aumenta la discretización de la
mayoría de las estructuras dinámicas lineares y el fortalecimiento de sus capacidades y el avance
del análisis modal teórico. Por otro lado una rápida evolución en las décadas pasadas sobre la

5
información adquirida y capacidad de procesamiento ha arrojado grandes avances en el área del
análisis experimental.
2.2 Análisis Modal Experimental
El análisis modal experimental es el proceso de determinar los parámetros modales como las
frecuencias, amortiguación y modos de vibrar de un sistema lineal e invariante en el tiempo a
través de una aproximación experimental. Los parámetros modales pueden ser determinados a
través de métodos analíticos, como el análisis de elementos finitos y una de las razones comunes
para el análisis modal experimental es la verificación u/o corrección de los resultados analíticos.
A menudo, sin embargo, un modelo analítico no existe y los parámetros modales determinados
experimentalmente sirven de modelo (base) para futuras evaluaciones como por ejemplo
modificaciones estructurales. Generalmente, un análisis modal experimental es usado para
explicar un problema o comportamiento dinámico, que no es obvio o intuitivo, modelos analíticos
o experiencias previas similares. Es importante recordar que la mayoría de los problemas de
vibración son funciones de ambos, las funciones de fuerza (o condiciones iniciales) y las
características del sistema descritas por los parámetros modales.
2.3 Visión General del Análisis modal Experimental
El proceso de determinar los parámetros modales desde datos experimentales implica varias
fases. Mientras estas fases pueden ser, en casos simples, muy abreviadas, el análisis modal
experimental depende del entendimiento de la base de casa fase. Como en la mayoría de las
situaciones experimentales, el éxito del proceso de análisis modal experimental consiste en tener
metas muy específicas para el momento de la prueba. Tales metas específicas afectan cada fase
del proceso en términos de reducir los errores asociados con esa fase. Mientras hay varias formas
de descomponer el proceso, una posible delineación de estas fases sería la siguiente:
• Teoría del Análisis Modal
• Métodos de Análisis Modal Experimental
• Adquisición de datos modales
• Estimación de parámetros modales
• Presentación y/o validación de los datos modales

6
2.3.1 Teoría del Análisis Modal
Se refiere a la parte de las vibraciones clásicas que explica, teóricamente, la existencia de
frecuencias naturales, factor de amortiguamiento y las formas de modos de sistemas lineales. Esta
teoría incluye tanto modelos de parámetros discretos como modelos continuos. Esta teoría
también incluye modos reales normales y modelos complejos de vibración como posibles
soluciones para los parámetros modales.
2.3.2 Métodos de Análisis Modal experimental
Consiste en la relación teórica entre las cantidades medidas y la teoría clásica de vibración
usualmente representada como las ecuaciones diferenciales matriciales. Todos los métodos
modernos siguen el rastro de las ecuaciones diferenciales matriciales pero producen una forma
matemática final en términos de datos medidos. Esta información medida puede ser información
de entrada de datos bruta y de salida en el los dominios del tiempo o de frecuencia o una cierta
forma de información procesada como la respuesta de impulso o las funciones de respuesta de
frecuencia. (FRF).
2.3.3 Adquisición de datos modales
Involucra los aspectos prácticos de la adquisición de información que es requerido como la
entrada de datos para la fase de estimación de parámetros modales.
Esta relacionada con el problema práctico de estimar los parámetros modales, basado en una
elección de modelo matemático, y justificado por el método modal experimental de análisis, de
los datos medidos.
2.3.5 Presentación o validación de datos modales
Es ese proceso de suministrar una interpretación o vista física de los parámetros modales. Por
ejemplo, ésta simplemente puede ser la tabulación numérica de la frecuencia, amortiguamiento, y
los vectores modales junto con la geometría asociada de los grados de libertad medidos. Más a
menudo, la presentación modal de datos involucra la esquematización y la animación de tal
información.

7
2.4 Desarrollo Teórico del Análisis Modal
2.4.1 Introducción
Una de las claves para entender el análisis modal involucra las relaciones entre diferentes
dominios usados para describir la dinámica de un sistema estructural. Esto involucra el tiempo, la
frecuencia (Fourier) y el dominio de Laplace. Estas relaciones, con respecto a un sistema
estructural, son las transformadas integrales (Fourier y Laplace) que reflejan la información
contenida por las ecuaciones diferenciales gobernantes transformadas para cada dominio. Es
importante notar que éstas son relaciones integrales y que las ecuaciones diferenciales
gobernantes representan relaciones continuas en cada dominio.
2.4.2 Supuestos Básicos del análisis modal
Hay cuatro suposiciones básicas, concernientes a cualquier estructura, que están hechas para
realizar un análisis modal experimental.
a) Se asume un comportamiento lineal de la estructura: La respuesta de la estructura a
cualquier combinación de fuerzas, simultáneamente aplicadas, es la suma de las respuestas
individuales para cada fuerza actuada por si sola.
b) La estructura es invariante en el tiempo: los parámetros a determinar permanecen
constantes.
c) La estructura obedece a la Ley de Reciprocidad de Maxwell: una fuerza aplicada en el
grado de libertad p que causa una respuesta en el grado de libertad q, produce la misma
respuesta en el grado de libertad p si la fuerza es aplicada en el grado de libertad q.
d) La estructura es observable: las mediciones realizadas deben contener suficiente
información para generar un adecuado modelo del comportamiento de la estructura.
2.4.3 Sistemas con un gado de libertad 1GDL
Para lograr entender el análisis modal, es necesario comprender el sistema de un grado de
libertad. La completa familiarización con el sistema de un grado de libertad para ser evaluado y
presentado en el dominio del tiempo, frecuencia (Fourier) y Laplace, sirven como base para
muchos de los modelos que son usados para la estimación de los parámetros modales.

8
La real importancia de estos resultados es el hecho que para un sistema con múltiple grado de
libertad puede ser visto como una simple superposición lineal de sistemas de un grado de
libertad.
Sistema de un grado de libertad
En general la representación matemática de un sistema de un grado de libertad es expresada en la
siguiente ecuación:
)()()()( tftKxtxCtxM =++ &&& (2.4.1)
donde:
M: constante de masa
C: constante de amortiguación
K: constante de rigidez
dejando f(t)=0, la forma homogenea de la Ec.( 2.4.1) puede ser resuelta.
)0)()()( =++ tKxtxCtxM &&& (2.4.2)
a través de la teoría de ecuaciones diferenciales, la solución se puede asumir como
donde s es una constante compleja a ser determinada. derivando y sustituyendo en la Ec. (2.4.2)
se obtiene:
stXetx =)(
0)( 2 =++ stXeKCsMs (2.4.3)
Así, para una solución no trivial, se tiene:
02 =++ KCsMs (2.4.4)

9
donde
s= variable compleja de la frecuencia (Laplace)
La Ec. (2.4.4) es la ecuación caracteridtica del sistema, donde λ1 y λ2 son:
21
2
1,2 22 ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛±−=
MK
MC
MCλ (2.4.5)
Así la solución general de la Ec. (2.4.2) es:
tt BeAetx 21)( λλ += (2.4.6)
donde A y B son constantes determinadas según las condicionoes iniciales impuestas al sistema
en t=0.
2.4.4 Dominio del tiempo: Función de respuesta al impulso.
La función de respuesta al impulso puede ser determinada a partir de la Ec, (2.4.6) asumiendo
que las condiciones iniciales son 0 y f(t) es un impulso. La respuesta del sistema, x(t) , a un
impulso unitario es conocido como la función respuesta al impulso del sistema h(t). Por lo tanto:
tt eAAeth*11 *)( λλ += (2.4.7)
][)( )()( 111 tjtjt AeAeeth ωωσ −+ += (2.4.8)
donde los coeficientes A y A* controlan la amplitud de la respuesta, la parte real es la razón de
decaimiento y la parte imaginaria es la frecuencia de oscilación.
Dominio del tiempo: Función de Respuesta de Impulso

10
2.4.5 Dominio de frecuencia: Función de respuesta de frecuencia
Equivale a la ecuación de movimiento (2.4.1), pero determinada para el dominio de Fourier o de
la frecuencia (ω). Esta función tiene la ventaja de convertir una función diferencial a una
algebraica. Esto resulta realizando la transformación de Fourier de la Ec. (2.4.1), Así la Ec.
(2.4.1) se convierte en:
)()(][ 2 ωωωω FXKjCM =++− (2.4.9)
j: resultado de la transformación de Fourier de una ec. diferencial a una algebraica, donde s=jω
en escrito de otra forma:
)()()( ωωω FXB = (2.4.10)
donde
KjCMB ++−= ωωω 2)(
La Ec. (2.4.10) establece que la respuesta del sistema X(ω) está relacionada con la función de
fuerza F(ω) a través de la cantidad B(ω), la función Impedancia. Si la fuerza y su respuesta son
conocidas, luego se puede calcular B(ω) puede ser calculada.
)()()(
ωωω
XFB = (2.4.11)
o se puede obtener la respuesta X(ω) debido a una fuerza F(ω):
)()()(
ωωω
BFX = (2.4.12)
así la Ec. (2.4.12) se convierte en :
)()()( ωωω FHX = (2.4.13)
donde
KjCMH
++−=
ωωω 2
1)(
H(ω) es conocida como la Función de Respuesta de Frecuencia

11
2.4.6 Dominio de Laplace: Función de Transferencia
Tal como en el caso del dominio de la Frecuencia, una información equivalente puede ser
presentada en el dominio de Laplace a través de la transformad de Laplace. La única diferencia
consiste en el hecho que la transformada de Fourier está definida desde el infinito negativo hasta
el infinito positivo. La presentación de Laplace, también tiene la ventaja de convertir una
ecuación diferencial en una ecuación algebraica. El desarrollo de la transformada de Laplace
comienza aplicando la transformada de Laplace a la Ec. (2.4.1). Así la Ec, (2.4.1) se convierte en:
)0()0(][)()(][ 2 XMXCMssFsXKCsMs &+++=++ (2.4.14)
)0(X y son el desplazamiento y velocidad en t=0 )0(X&
si las condiciones iniciales son cero, la Ec. (2.4.14) queda:
)()(][ 2 sFsXKCsMs =++ (2.4.15)
escrito de otra forma
)()()( sFsXsB = (2.4.16)
donde
KCsMssB ++= 2)(
Así, usando la misma lógica que en el caso del dominio de la frecuencia, la función de
transferencia puede ser definida en la misma forma para el domino de la frecuencia.
)()()( sFsHsX = (2.4.17)
donde
KCsMssH
++= 2
1)(
La función transferencia puede ser escrita como:

12
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+
=++
=
MKs
MCs
MKCsMs
sH2
2
/11)( (2.4.18)
Válida solo si las condiciones iniciales son cero.
La función transferencia puede ser escrita como función de polos complejos:
)()())((/1)( *
1
*
1*11 λλλλ −
+−
=−−
=s
As
Ass
MsH
2.4.7 Sistemas con múltiples grados de libertad.
La aplicación real del concepto de análisis modal comienza cuando una estructura continua y no
homogénea es descrita como sistema de múltiples grados de libertad con masa distribuida.
El desarrollo de la función de respuesta de frecuencia para múltiples grados de libertad se
asemeja al caso de un grado de libertad. Este desarrollo relaciona las matrices de masa,
amortiguación y rigidez a una modelo de función de transferencia que involucra múltiples grados
de libertad.
Como resultado del concepto de superposición lineal, las ecuaciones para la función de respuesta
de impulso, la función de respuesta de frecuencia y la función de transferencia para sistema de
múltiples grados de libertad queda como sigue:
-Función de respuesta de impulso:
[ ] [ ] [ ] [ ]∑ ∑= =
=+=N
r
N
r
tr
tr
tr
rrr eAeAeAth1
2
1
* *
)( λλλ
-Función de repuesta de frecuencia:
[ ] [ ] [ ] [ ]∑ ∑= = −
=−
+−
=N
r
N
r r
r
r
r
r
r
jA
jA
jAH
1
2
1*
*
)(λωλωλω
ω
-Función de transferencia:
[ ] [ ] [ ] [ ]∑ ∑= = −
=−
+−
=N
r
N
r r
r
r
r
r
r
sA
sA
sAsH
1
2
1*
*
)(λλλ
donde

13
t: Variable tiempo
ω: Variable frecuencia
s: Variable de Laplace
p: Grado de libertad medido (salida)
q: Grado de libertad medido (entrada)
2.5 Teoría de la vibración por flexión de vigas uniformes
El tratamiento de vigas sometidas a vibración por flexión está basado en la teoría de flexión
normalmente aplicada en ingeniería. Este método es conocido como teoría de Bernoulli-Euler, la
cual supone que una sección transversal plana de una viga permanece plana durante las
deformaciones por flexión.
Consideremos en la siguiente figura el diagrama de cuerpo libre de un segmento corto de viga.
(a) Viga simple con masa y carga distribuida. (b)Diagrama cuerpo libre del segmento dx de la
viga
Su longitud es dx y está limitada por dos secciones transversales planas que son perpendiculares a
su eje. Las fuerzas y momentos que actúan sobre el elemento también se muestran en la figura.
Estos son: los esfuerzos de corte V y V+(δV/δx); los momentos flectores M y M+( δM/δx); la
carga lateral pdx y la fuerza inercial 2/)( tydxm δδ , donde m es la masa por unidad de longitud
y es la carga por unidad de longitud. Las derivadas parciales se usan para expresar la
aceleración, las variaciones del esfuerzo cortante y del momento flector.
),( txpp =
La ecuación obtenida igualando a cero la suma de las fuerzas de dirección perpendicular al eje x
de la viga es:
0),( 2
2
=−+⎟⎠⎞
⎜⎝⎛ +−
tydxmdxtxpdx
xVVV
δδ
δδ
(2.5.0)
La cual una vez simplificada se reduce a:

14
),(2
2
txpt
ymxV
=+δδ
δδ
(2.5.1)
De la teoría elemental de flexión, tenemos las relaciones
2
2
xyEIM
δδ
= (2.5.2)
xMVδδ
= (2.5.3)
En que E es el módulo de elasticidad de Young e I es el momento de inercia de la sección
transversal con respecto a la línea neutra a través del centroide. Para una viga uniforme, la
combinación de las ecuaciones (2.5.1), (2.5.2) y (2.5.3) da como resultado:
3
3
xyEIV
δδ
= (2.5.4)
),(2
2
4
4
txpt
ymx
yEI =+δδ
δδ
(2.5.5)
Solución de la ecuación del movimiento en vibración libre:
Para la vibración libre ( )0),( =yxp , la ecuación (2.5.5) se reduce a la ecuación diferencial
homogénea:
02
2
4
4
=+t
ymx
yEIδδ
δδ
(2.5.6)
La solución de esta ecuación puede obtenerse por el método de separación de las variables, la
cual supone que la solución puede ser expresada como el producto de una función de posición
)(xφ y una función de tiempo , es decir: )(tf
)()(),( tfxtxy φ= (2.5.7)
Reemplazando la ecuación (2.5.7) en la Ec. Diferencial (2.5.6) nos da.
0)()()()( 2
2
4
4
=+dt
tfdxmdx
xdtEIf φφ
(2.5.8)
Y esta última se puede escribir como:

15
)()(
)()(
tftf
xx
mEI IV &&
−=φ
φ
(2.5.9)
En esta ecuación, los índices en números romanos indican derivadas con respecto a x y los puntos
sobre las letras indican derivadas con respecto al tiempo. Debido a que el primer miembro es
función solamente de x, mientras que el segundo miembro solo es función del tiempo t y para que
se cumpla la identidad de la ecuación (2.5.9), ya que ambos miembros deben ser funciones de la
misma constante, se designa esta constante como que iguala separadamente a cada miembro
y nos da las siguientes dos ecuaciones:
2ω
0)()( 4 =− xaxIV φφ (2.5.10)
0)()( 2 =+ tftf ω&& (2.5.11)
En donde
EIma
24 ω=
(2.5.12)
Es conveniente despejar ω y usar la siguiente notación
4LmEIC=ω
(2.5.13)
, donde 2)(aLC =
La ecuación (5.5.11), al tener la misma forma de la ecuación de vibración libre para un sistema
no amortiguado con un solo grado de libertad, tiene como solución:
tSenBtCosAtf ωω ··)( += (2.5.14)
en donde A y B son constantes de integración.
La ecuación (2.5.19) puede resolverse haciendo
sxCex =)(φ (2.5.15)
La aplicación de la ecuación (2.5.15) en la ecuación (2.5.10) da:

16
0)·( 44 =− sxCeas , la cual para una solución no trivial requiere que:
044 =− as (2.5.16)
Las raíces de la ecuación anterior son:
as =1 ais =3
as −=2 ais −=4
La aplicación de estas raices en la Ec. (2.5.15) da una solución de la Ec. (2.5.10). La solución
general será la superposición de estas cuatro posibles soluciones, esto es:
iaxiaxaxax eCeCeCeCx −− +++= 4321)(φ (2.5.18)
En donde C1, C2, C3 y C4 son las constantes de integración. Estas funciones exponenciales
pueden ser expresadas mediante funciones trigonométricas e hiperbólicas por medio de las
relaciones:
senhaxaxe ax ±=± cosh
isenaxaxe iax ±=± cos (2.5.19)
La aplicación de estas relaciones en la Ec. (2.5.15) da:
axDCsenhaxaxBAsenaxx coshcos)( +++=φ (2.5.20)
Donde A, B, C y D son las nuevas constantes de integración. Estas cuatro constantes de
integración definen la forma y la amplitud de la viga en vibración libre. Se calculan considerando
las condiciones de contorno en los extremos de la viga.
Para el caso de una viga en voladizo, se tiene que en el extremo empotrado (x=0) la deformación
y la pendiente son cero y en el extremo libre (x=L) el momento de flexión y la fuerza cortante
deben ser cero. Por lo tanto las condiciones de contorno son las siguientes:
Para x=0
0),0( =ty o 0)0( =φ
0),0( =′ ty o 0)0( =′φ (2.5.21)
Para x=L
0),( =tLM o 0)( =′′ Lφ
o 0),( =tLV 0)( =′′′ Lφ (2.5.22)

17
Aplicando estas condiciones de contorno en la Ec. (2.5.20), resulta la ecuación característica
01·coshcos =+LaLa nn (2.5.23)
Finalmente a cada raíz de la Ec. (2.5.23) le corresponde una frecuencia natural
4
2)(Lm
EILann =ω (2.5.24)
y un modo normal
)()cos(cosh)( xsenaxsenhaxaxax nnnnnn −−−= σφ (2.5.25)
donde
LsenhaLsenaLaLa
nn
nnn +
+=
coshcosσ
(2.5.26)
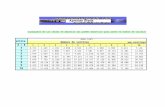
Tabla 5.1 Primeras cinco Frecuencias naturales y modos correspondientes para viga en voladizo
n 2)( LaC nn = nσ In* Formas modales
1 3.5160 0.734096 0.7830
2 22.0345 1.018466 0.4340
3 61.6972 0.999225 0.2589
4 120.0902 1.000033 0.0017
5 199.8600 1.000000 0.0707

18
2.6 Fundamentos del Análisis Modal Experimental
Usando técnicas de análisis de señales, podemos medir vibraciones en estructuras y realizar
análisis de frecuencias. La descripción del espectro de frecuencia de cómo varía el nivel de
vibración con la frecuencia puede ser comparado con un patrón. Este tipo de prueba entrega
resultados que son relevantes para las condiciones medidas. El resultado será producto de la
respuesta estructural y el espectro de una fuerza de excitación desconocida.
El análisis Modal es una técnica de análisis de sistema en donde un analizador FFT
(Transformada Rápida de Fourier), puede ser usado para medir la respuesta a una fuerza
conocida. La medición de la Función Respuesta de Frecuencia (FRF) describe la respuesta
estructural inherente entre los puntos de medición. Usando un conjunto de mediciones de la FRF
realizadas en puntos definidos de una estructura, se puede comenzar a construir una imagen de su
respuesta.
2.6.1 Transformada Rápida de Fourier
La Transformada Rápida de Fourier está basada en el Análisis de Fourier el cual establece que
por muy compleja que sea una onda, si la forma de dicha onda es periódica, entonces se puede
representar con una precisión arbitraria mediante la superposición de un número suficientemente
grande de ondas senoidales que forman una serie armónica. Por lo tanto toda función f(t)
periódica de periodo T, se puede representar en forma de una suma infinita de funciones
armónicas, es decir,
∑∞
=
++=1
0 ))()cos((2
)(i
ii tisenbtiaa
tf ωω
Donde el periodo ωπ2=T
y a0, a1,…ai... y b1, b2, ….bi… son los denominados coeficientes de
Fourier. Los coeficientes ai y bi están determinados a continuación,
∫+
=Tt
t
dttFT
a1
1
)(10
∫+
=Tt
ti dttitF
Ta
1
1
)cos()(2 ω ,....3,2,1=i
∫+
=Tt
ti dttisentF
Ta
1
1
)()(2 ω ,....3,2,1=i

19
Concepto de la Transformada de Fourier
2.6.2 La Función de Respuesta en Frecuencia FRF
Una FRF es normalmente usada para describir la relación entrada-salida de algún sistema, en
nuestro caso es usada para describir la relación entre la fuerza aplicada a la viga a través de un
golpe y la respuesta obtenida a través de un acelerómetro.
La respuesta de frecuencia es una característica de un sistema que tiene una respuesta medida que
es el resultado de una entrada conocida aplicada. En el caso de una estructura mecánica, la
respuesta de frecuencia es el espectro de la vibración de la estructura, dividido entre el espectro
de la fuerza de entrada al sistema. Para medir la respuesta de frecuencia de un sistema mecánico,
hay que medir los espectros de la fuerza de entrada al sistema y de la respuesta de vibración
La estimación de la función de respuesta de frecuencia depende de la transformación de datos
desde el tiempo al dominio de frecuencia. La transformada de Fourier sirve para este cálculo.
Desafortunadamente, la definición de la integral de la transformada de Fourier requiere una
recolección de datos en el tiempo que va desde el infinito negativo hasta el infinito positivo.
Como esto no es posible experimentalmente, la computación es realizada digitalmente usando un
algoritmo de transformación rápida de Fourier que se basa en un historial de tiempo limitado
(la transformada rápida de Fourier). De esta forma las ventajas teóricas de la transformada de
Fourier pueden ser implementadas en un esquema digital computacional. La función de respuesta
de frecuencia satisface las siguientes relaciones para entradas simples y múltiples.

20
CAPITULO III: Análisis Numérico - Experimental
3.1 Introducción
En el presente capítulo se analizará una viga de acero en voladizo modelada con el software
Ansys, con el fin de encontrar las cinco primeras frecuencias naturales en flexión y compararlas
posteriormente con las frecuencias naturales teóricas obtenidas a través de la Teoría de Bernoulli-
Euler. Luego se modelará una grieta con diferentes profundidades para analizar como influye en
los cambios de frecuencia. Estos cambios en las frecuencias se compararán con los que se
obtendrán en el análisis experimental real de la viga.
3.2 Análisis en MEF
El método de elementos finitos MEF es la solución numérica de una modelación física y que para
el análisis modal utiliza la teoría del análisis modal y la aplica a un sistema de múltiples grados
de libertad para obtener los parámetros modales de una estructura. Para la presente tesis se
utilizará el software ANSYS 10 y un computador personal con procesador Celeron de 1.5 GHz de
velocidad y 1GB en RAM.
3.2.1 Definición del elemento a utilizar
Para la modelación de la viga se utilizó el elemento SHELL63 utilizado para modelar placas. El
elemento está definido por cuatro nodos teniendo seis grados de libertad en cada uno: 3
translaciones en las direcciones x, y, z y 3 rotaciones respecto de los ejes x, y, z.

21
La elección de este elemento se debió a que es posible modelar una grieta, ya que este elemento
ha sido utilizado para análisis de grietas en otras investigaciones.
Cabe señalar que también se analizó el modelo con elementos sólidos SOLID45, pero los
resultados no eran tan precisos como el diseño en SHELL63.
Las propiedades de la viga fueron asumidas como un acero estándar, es decir un módulo de
elasticidad E=2.1E11 N/m2, densidad ρ=7850 Kg/m3, coeficiente de poisson μ=0.3 y se consideró
al material como isotrópico.
Para poder establecer si el modelo usado entrega buenos resultados, lo primero es realizar varios
modelos con diferente mallado para elegir cual entrega las frecuencias naturales más cercanas a
las frecuencias teóricas obtenidas a través del análisis de viga en flexión Bernoulli-Euler descrito
en el Capítulo II.
A continuación se muestra una tabla donde se comparan las frecuencias correspondientes a los
cinco primeros modos de vibración vertical de ambos modelos, SHELL63 y SOLID 45, y el
porcentaje relativo con respecto de las teóricas.
Teórico SOLID45 SHELL63
Modo Hz Hz % Hz %
1 22.46 23.54 104.82 22.48 100.09
2 140.75 146.71 104.24 140.14 99.57
3 394.09 407.23 103.33 389.20 98.76
4 767.08 788.2 102.75 753.86 98.28
5 1276.61 1085.3 85.01 1036.20 81.17
Para poder visualizar la diferencia entre los elementos SOLID45 y SHELL63, se realizaron los
siguientes gráficos. El primero muestra los cambios en las tendencias de las frecuencias y el
segundo hace una comparación directa entre las frecuencias teóricas y las obtenidas por Ansys a
través de una relación entre las frecuencias de Ansys divididas por las teóricas.
Hay que señalar que las líneas que unen los puntos solo sirven para poder identificar mejor los
cambios.

22
Frecuencias de cada modo
0.00
200.00
400.00
600.00
800.00
1000.00
1200.00
1400.00
1 2 3 4 5
Modos
Frec
uenc
ias
Hz.
TeóricoSOLID45SHELL63
Cambio en la relación de Frecuencias
0.6
0.7
0.8
0.9
1
1.1
Modos
Rel
ació
n A
nsys
Te
óric
o
TeóricoSOLID45SHELL63
Teórico 1 1 1 1 1
SOLID45 1.05 1.04 1.03 1.03 0.85
SHELL63 1.00 1.00 0.99 0.98 0.81
1 2 3 4 5
De estos gráficos se puede concluir que el elemento que mejor modela los primeros tres modos y
las correspondientes frecuencias es el elemento SHELL63, ya que el porcentaje de error es de
alrededor del 1% para las tres primeras frecuencias. Además se puede observar que las
frecuencias disminuyen en forma lineal hasta el cuarto modo. En el quinto modo ya se aprecia
una diferencia considerable de aproximadamente un 20%.

23
3.2.2 Modelación de la Viga en Voladizo
Debido a que el momento flector es máximo en el empotramiento el análisis de la grieta se
realizará en dicho lugar. Para esto se realizaron dos modelos (A y B) para luego escoger el más
eficiente. El modelo A es el que representa a la viga real que será analizada experimentalmente,
en este caso se modela la viga completa, es decir la viga de 1.5 metros, en donde 0.25 m. están
empotrados y los otros 1.25m corresponden a la parte en voladizo. El modelo B solo considera la
parte en voladizo e igualmente empotrado en la zona de la grieta. A continuación se grafican
estos dos modelos.
Antes de crear la grietas se modelaron ambos modelos sin grieta y los resultados fueron los
mismos, es decir, entregaron las mismas frecuencias para los cinco primeros modos de vibrar, por
lo tanto se optó con seguir el desarrollo de la grieta con el modelo B debido al mayor uso de
recursos, por parte de Ansys, que significa incluir la parte empotrada dentro de los cálculos, en
cambio, usando el modelo B se pueden usar esos recursos ahorrados para realizar un mallado
posterior más fino.
3.2.3 Modelación de la Grieta
El modelo de la grieta está basado en modelos realizados en otras investigaciones, como por
ejemplo sobre la tensión producida alrededor de la grieta y también en estudios sobre detección
de grietas en vigas. En estos estudios la modelación de la grieta se realiza simplemente en forma
de “V” en donde se distinguen dos zonas, la boca de la grieta y la punta.

24
Las dimensiones de la grieta serán de una boca de un milímetro y la profundidad irá variando en
0.1·h, hasta llegar a 0.5·h, es decir al medio de la altura de la viga.
Para crear un mejor mallado alrededor de la punta de la grieta, que es donde ocurre una mayor
concentración de tensiones, se utilizará la herramienta de mallado “Concentration Keypoint”, con
la cual se crea un punto de concentración del mallado y por lo tanto de las tensiones.
Main Menu>Preprocessor>Meshing>Size Cntrls>Concentrat KPs>Create
En la siguiente imagen se muestra la modelación de grieta con un 50% de profundidad y el punto
de concentración de tensiones en la punta de la grieta.
Punto de concentración

25
Debido a que los cambios en el modo de vibración, debido a la grieta, de los tres primeros modos
de vibrar no se aprecian en el entorno gráfico de Ansys, solo se mostraran los modos de vibración
de la viga sin grieta y luego los resultados de los cambios en las frecuencias en un cuadro
comparativo.
Primer Modo a 22.479 Hz.
Segundo Modo a 140.14 Hz.
Tercer Modo a 389.199 Hz.
A continuación de muestra la tabla comparativa para las frecuencias de los cinco primeros modos
y los cambios porcentuales en las frecuencias dependiendo del tamaño relativo de la grieta ha ,
donde a es el tamaño de la grieta y h es la altura total de la viga.
El porcentaje que aparece en la tabla es el cambio respecto de la viga sin grieta modelada en
Ansys.

26
Modo a/h=0 a/h=0.1 a/h=0.2 a/h=0.3 a/h=0.4 a/h=0.5
nº Hz Hz % Hz % Hz % Hz % Hz %
1 22.48 22.42 99.82 22.247 99.06 21.933 97.66 21.43 95.41 20.687 92.11
2 140.14 139.76 99.30 138.71 98.55 136.90 97.27 134.2 95.33 130.53 92.74
3 389.20 388.14 98.49 385.31 97.77 380.65 96.59 374 94.90 365.18 92.66
4 753.86 751.80 98.01 746.50 97.32 738.07 96.22 726.5 94.71 712.67 92.91
5 1036.20 1035.50 81.11 1033.3 80.94 1028.8 80.59 1021 79.96 1008.8 79.02
Estos datos se grafican en el siguiente gráfico y posteriormente, en el capitulo IV, se compararán
con los datos obtenidos experimentalmente.
Cambio relativo de frecuencia en cada modo
0.90
0.92
0.94
0.96
0.98
1.00
Modos
Frec
uenc
ia r
elat
iva
a/h=0.1a/h=0.2a/h=0.3a/h=0.4a/h=0.5
a/h=0.1 1.00 1.00 1.00 1.00 1.00
a/h=0.2 0.99 0.99 0.99 0.99 1.00
a/h=0.3 0.98 0.98 0.98 0.98 0.99
a/h=0.4 0.95 0.96 0.96 0.96 0.99
a/h=0.5 0.92 0.93 0.94 0.95 0.97
1 2 3 4 5
De este gráfico se observa que a medida que aumenta el tamaño de la grieta, la disminución de
las frecuencias es prácticamente constante para los tamaños 0.1h y 0.2h en los cuatro primeros
modos de vibrar, sin embargo, esta disminución deja de ser constante para los cuatro primeros
modos cuando la grieta aumenta hasta un tamaño de 0.5h.
La proporcionalidad de la disminución de las frecuencias en cada modo debido al aumento de la
grieta se puede apreciar en el siguiente gráfico.

27
Disminución relativa según tamaño de grieta
0.90.910.920.930.940.950.960.970.980.99
1
Tamaño de grieta a/h
Frec
uenc
ia re
lativ
a Modo 5Modo 4Modo 3Modo 2Modo 1
Modo 5 1 1.00 1.00 0.99 0.99 0.97
Modo 4 1 1.00 0.99 0.98 0.96 0.95
Modo 3 1 1.00 0.99 0.98 0.96 0.94
Modo 2 1 1.00 0.99 0.98 0.96 0.93
Modo 1 1 1.00 0.99 0.98 0.95 0.92
1 2 3 4 5 6
Este gráfico muestra como cambia la frecuencia para cada modo a medida que aumenta el tamaño
de la viga. Y a medida que analizamos los modos superiores, nos damos cuenta que el efecto de
la grieta sobre los modos disminuye mientras más alto es el modo.
3.3 Análisis Experimental
3.3.1 Introducción
En la presente sección se detallaran las características del equipo que se utilizará en nuestro
análisis modal experimental. Luego se comparará este equipo con un equipo de análisis modal
real, ya que en el laboratorio de ensayo de materiales solo se cuenta con un analizador de
vibraciones para máquinas (Vibracheq), lo cual limita la capacidad para realizar un análisis
modal experimental, sin embargo se aprovechará al máximo toda la información que pueda
entregar el medidor de vibraciones (Vibracheq) y el respectivo software (Maintraq) con que
cuenta. Finalmente se explicará el método que será utilizado, llamado “Prueba de impacto”
(Bump Test).

28
3.3.2 Sistema ideal para un Análisis Modal Experimental
Existen dos formas de realizar un AME. El primero en donde se utiliza un Excitador
Electrodinámico (Shaker) el cual actúa como una fuerza de excitación externa que puede variar la
frecuencia de vibración con el fin de realizar un “rastreo de frecuencias” más uno o más
acelerómetros para medir la respuesta a esta fuerza. Y el segundo llamado “Prueba de impacto” a
través de un martillo sensorizado que genera un golpe como fuerza excitadora.
En ambos, la fuerza de excitación es medida y luego utilizada como dato de entrada, además,
ambos emplean un sistema de adquisición de datos de dos o más canales (multicanal) y un
software para el manejo de los datos obtenidos.
El proceso de análisis con estos sistemas se puede resumir en el siguiente orden: La señal
producida por el acelerómetro es transmitida a un sistema multicanal de adquisición de datos.
Este sistema transforma la señal analógica del acelerómetro en digital y transforma la forma de
onda recibida en un espectro de frecuencias a través de la FFT. Luego esta información es
transmitida a un PC con un software de análisis donde se obtiene la función de respuesta de
frecuencia y a su vez se obtienen los parámetros modales de la estructura: la forma de los modos,
frecuencia natural y razón de amortiguamiento.
.
Martillo
Acelerómetro
3.3.3 Prueba de Impacto (Bump Test)
La prueba de impacto es un método simple para el análisis de la respuesta modal estructural de
una máquina o estructura. Cuando la estructura es impactada produce una amplia banda de
frecuencia de componentes de excitación. Cuando estos componentes coinciden con la frecuencia
natural estructural, las condiciones de resonancia se hacen presentes lo que resulta en un nivel de
vibración más alto que el normal a esas frecuencias. Durante la prueba de impacto las amplitudes
de vibración y las frecuencias son medidas con un acelerómetro y la información se entrega en
gráficos de amplitud versus frecuencia. Los picos de las frecuencias corresponden a los modos

29
flexibles estructurales y el ancho de los picos provee información sobre los factores de
amplificación.
En la mayoría de los casos de vibración de máquinas, no es tan necesario determinar la magnitud
exacta de la función de transferencia, la información más importante está en las frecuencias de
los modos de vibrar de la estructura, la ubicación y así como también, la amortiguación asociada
a esos modos.
El equipo VibraCHECK puede ser usado para realizar una prueba de impacto sin la necesidad de
un martillo especial con un sensor de fuerza. La técnica implica simplemente golpear la
estructura con algún artefacto como un martillo de madera o de goma.
3.3.4 Sistema Utilizado
El laboratorio de ensayo de materiales cuenta con un analizador de vibraciones marca
VibraCHECK el cual utiliza un acelerómetro marca Wilcoxon Research 784A, para medir
vibraciones mecánicas y un software para el análisis de la información llamado MAINTraq.
Este equipo es usado para el análisis de vibraciones mecánicas portátil. Mide aceleración,
velocidad, desplazamiento y envolvente. Además muestra y mide espectros o formas de onda.
Está diseñado para detectar los siguientes tipos de fallas: desalineaciones, solturas mecánicas,
fallas en rodamientos, malas condiciones de lubricación, cavitación de bombas y desbalanceos, a
través del análisis espectral de frecuencias dentro del campo del mantenimiento predictivo de
máquinas.
VibraCHECK se programa para que registre las formas de onda y espectros de los puntos de
medición, es decir realiza la descomposición de la onda recibida a través de un algoritmo FFT
incorporado y luego genera el espectro.
El colector de datos VibraCHECK utiliza un acelerómetro Wilcoxon Research 784A. Este
acelerómetro tiene una masa de 90 gramos, un rango de aceleración de 80g , una banda de
frecuencia de 0.7 hasta 12kHz y finalmente una frecuencia de resonancia de 30kHz , la cual está
lejos de las frecuencias naturales de la viga en estudio.
3.3.5 Descripción del método utilizado
Debido a que no se cuenta con un equipo de análisis modal, como ya se explicó anteriormente,
será imposible obtener los modos de vibrar a flexión de la viga en forma directa, sin embargo, a

30
través del equipo de medición de vibraciones VIBRACHECK con el que cuenta el Instituto de
Cs. Navales y Marítimas, se obtendrán las frecuencias a las cuales la viga en estudio vibra en
resonancia.
El método que se utilizará es el llamado Prueba de Impacto “Bump Testing”, para obtener las
frecuencias de vibración en flexión de la viga a través de un golpe que excitará la viga en
diversos modos de vibración.
La razón por la cual éste método no corresponde a un análisis modal es porque el sistema
completo para el análisis de vibraciones, vale decir acelerómetro, equipo de adquisición de datos
VibraCHECK y el software de análisis MAINTrack, no generan por si solos las formas de los
modos de vibrar de la viga, pero si entrega las frecuencias de resonancia de esta. Esto se debe a
que el equipo no tiene incorporado un algoritmo para la Función de Respuesta de Frecuencia
(FRF), ya que las FRFs necesitan de al menos 2 canales de adquisición de datos, uno para la
fuerza de excitación y otro para medir la respuesta de esta fuerza y como ya se sabe, el equipo
VibraCHECK cuenta solo con un canal que es usado para medir solo la respuesta.
3.3.6 Validación del método utilizado
Para poder estar seguros que la frecuencias obtenidas con el equipo VibraCHECK son las que
corresponden a los modos de vibrar de la viga, se realizará un análisis de vibraciones con un
equipo multicanal de monitoreo continuo para la medición de vibraciones en máquinas llamado
VibraSPEC. Este equipo no pertenece al Instituto, sino que pertenece a la empresa KINETEC
quienes facilitaron sus dependencias para realizar la experiencia.
La idea de esta experiencia es intentar generar las formas modales de al menos los tres primeros
modos de vibrar en flexión. Para esto se utilizaron tres de los cuatro canales con los que cuenta el
equipo, ya que se necesitan solo tres para poder obtener la forma de los tres primeros modos
como se detallará a continuación.
Debido a que el equipo VibraSPEC tampoco cuenta con un algoritmo FRF, la obtención de las
formas de los modos se hará en forma manual y casi intuitiva, ya que al usar tres acelerómetros
en forma simultanea solo necesita un golpe para registrar la respuesta en estos tres puntos, por lo
tanto la medición de la fuerza se vuelve innecesaria debido a que la variación de la fuerza que se
produce al realizar la experiencia más de una vez solo entregara respuestas de mayor o menor
magnitud correspondiente a un golpe de mayor o menor magnitud respectivamente, siempre y
cuando el golpe se realice en el mismo lugar.

31
La configuración de la ubicación de los tres acelerómetros, como se mostrará a continuación, es
la misma que se usa en un análisis modal tradicional.
De esta forma los acelerómetros captaran las magnitudes necesarias para poder modelar los
modos.
Lo que se busca con esto es realizar en forma manual los que hace una matriz FRF, es decir a
partir de los espectros de frecuencias que entregue cada acelerómetro se conformarán las formas
de los diferentes modos.
Antes de todo es necesario recordar que la función de transferencia, que relaciona la fuerza
aplicada y la respuesta, está compuesta por una parte real y otra imaginaria, como no contamos
con esta función de transferencia (FRF) el software MAINTraq solo nos entrega un espectro sin
diferencia de fase, es decir, solo obtendremos las frecuencias y las magnitudes correspondientes
para cada modo y para cada acelerómetro.
Como cada acelerómetro entrega las tres primeras frecuencias para cada Modo se deberán hacer
las siguientes suposiciones de acuerdo a la figura anterior.
1- Para el primer Modo las magnitudes de los acelerómetros 1, 2 y3 serán positivas
2- Para el segundo Modo las magnitudes de los acelerómetros 1 y 2 serán positivas y para el
acelerómetro 3 será negativa.
3- Para el tercer Modo las magnitudes de los acelerómetros 1 y 3 serán positivas y para el
acelerómetro 2 será negativa.
Lo que se quiere lograr se grafica en el siguiente ejemplo:

32
Donde f1, f2 y f3 son las frecuencias de los tres primeros modos y A1 A2 y A3 son los espectros
que corresponden a los acelerómetros A1, A2 y A3.
Lo que representa esta figura es la forma del primer modo. Y siguiendo con el mismo ejemplo,
para el segundo modo tenemos lo siguiente:
3.3.7 Obtención de los modos de vibrar
Como anteriormente ya se explicó la forma en que se obtendrán los tres primeros modos de
vibrar, ahora solo falta la información que entregarán los tres acelerómetros conectados al equipo
VibraSpec.
Antes del uso del equipo, se deben definir algunos parámetros de medición. Con cada
acelerómetro se puede obtener la siguiente información:
Tres formas de onda y tres espectros de los siguientes parámetros:
-Aceleración
-Velocidad
-Desplazamiento
y cada uno de estos parámetros se debe configurar en forma independiente. En esta configuración
se debe definir lo siguiente:
-Rango del espectro de frecuencias
-Cantidad de líneas del rango
-Cantidad de Promedios
De la adecuada definición de estos parámetros es que dependen tanto la precisión como el tiempo
que se demorará el equipo en adquirir y procesar la información generada por los acelerómetros.

33
Como los modos de vibrar comienzan a desaparecer en el tiempo, la adquisición de datos debe
ser rápida, por lo tanto solo se medirá la aceleración y de esta se obtendrá la forma de onda y el
espectro correspondiente. La configuración para estos datos es la siguiente:
Para el espectro de Aceleración
y para la forma de onda:
La elección de estos valores se debe, como ya se explicó, a que a medida que aumentan, el
tiempo necesario para procesar los datos también aumenta y de esta forma se logran obtener las
frecuencias de los tres primeros modos.

34
3.3.8 Resultados Obtenidos
Las frecuencias obtenidas a partir de los tres acelerómetros se muestran en el siguiente cuadro.
A1 A2 A3 Hz g Hz Hz Hz Hz Modo 1 19.0 0.312 19.0 0.213 19.0 0.016Modo 2 115.7 7.730 115.7 1.660 115.7 5.858Modo 3 328.1 0.985 328.1 0.588 328.1 1.379Los espectros de los tres acelerómetros se muestran a continuación:
Acelerómetro A1
Acelerómetro A2
Acelerómetro A3
En cada espectro se muestran las frecuencias de vibración de los tres primeros modos, además en
la esquina superior derecha, está señalada la frecuencia que indica la cruz.

35
La razón por la cual aparecen los tres primeros modos en el mismo espectro se debe a que el
golpe hace vibrar la viga en muchos modos en forma simultanea, que es lo que se pretende al
realizar una prueba de impacto, y luego la transformada de Fourier separa estas frecuencias de
resonancia como se explicó en el capítulo II.
Antes de obtener los modos de vibrar se debe transformar las aceleraciones a desplazamiento,
para eso usaremos la siguiente expresión:
2ωm
ma
d =
dm y am son el desplazamiento y aceleración máxima.
Aplicando las suposiciones de la sección 3.3.6 y ordenando estos valores de acuerdo a la
ubicación de los acelerómetros, se tiene:
A3 A2 A1
ω(rad/s) mm ω(rad/s) mm ω(rad/s) mm
Modo 1 119.38 0.0110 119.38 0.1466 119.38 0.2148
Modo 2 726.96 -0.1087 726.96 0.0308 726.96 0.1435
Modo 3 2061.51 0.0032 2061.51 -0.0014 2061.51 0.0023
Modo 1
-0.050
0.050.1
0.150.2
0.25
0 0.2 0.4 0.6 0.8 1 1.2
L (m)
Des
plaz
amie
nto
(mm
)
Modo 2
-0.2-0.15-0.1
-0.050
0.050.1
0.15
0 0.2 0.4 0.6 0.8 1 1.2
L (m)
Des
plaz
amie
nto
(mm
)

36
Modo 3
-0.002-0.001
00.0010.002
0.0030.004
0 0.2 0.4 0.6 0.8 1 1.2
L (m)
Des
plaz
amie
nto
(mm
)
Con esto queda demostrado que las tres frecuencias de resonancia obtenidas corresponden a los
tres primeros modos de vibración en flexión.
A continuación se presentan los resultados obtenidos con el equipo VibraSPEC usando tres
acelerómetros con los teóricos para las tres primeras frecuencias de vibración en flexión.
Teóricos VibraSPEC
Hz. Hz. %
22.46 19 84.60%
140.75 115.7 82.20%
394.09 328.1 83.25%
Si comparamos las frecuencias obtenidas con las respuestas teóricas, existe una diferencia de
entre un 15% y un 17%, esto se puede deber a varias razones como por ejemplo la variación que
puede existir en el Módulo de elasticidad y la Densidad utilizada, pero la diferencia se debe
principalmente al efecto del peso de los acelerómetros sobre los modos de vibrar.
Esto se demuestra a través de la siguiente fórmula en donde se obtiene la frecuencia natural de
una viga en voladizo con una masa en su extremo libre.
)236.0(3
21
3B
n mmlEIf
+=
π
donde
m: masa adicional en el extremo libre
mB:masa de la viga
Con lo cual obtenemos una frecuencia de 21.8 Hz. que es 3% menor al teórico sin masa
adicional. Además, como veremos a continuación, el usar un acelerómetro en vez de tres reduce
la diferencia obtenida de un 15 % a un 9%, por lo tanto el análisis experimental de la grieta en la
viga será solo con un acelerómetro.

37
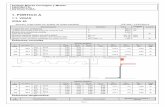
3.3.9 Modelación de la Grieta experimental
Para crear la grieta en la viga de acero, se utilizó una
sierra para acero de espesor 0.64 mm. la cual genera un
espesor de corte de 1.0mm aproximadamente. La
diferencia con la grieta modelada en Ansys es que la
punta de la grieta no termina en forma de “V”, sino que
termina plana con el mismo espesor que la boca, pero a
pesar de esto lo que se intenta reproducir es una
concentración de tensiones en esa zona al momento de la vibración, por lo tanto debería
funcionar sin problemas.
Grieta
Al igual que en Ansys, el tamaño relativo de la grieta irá en aumento en 0.1, hasta llegar a un
tamaño de a/h=0.5. Como se explicó anteriormente, debido a que el objetivo principal es obtener
los cambios en las frecuencias de vibración de la viga a medida que aumenta el tamaño de la
grieta, solo se utilizará un acelerómetro, ya que la diferencia entre los resultados de Ansys y lo
Experimental aumenta a medida que se utilizan más acelerómetros.
A continuación, la tabla donde se muestran los resultados de las frecuencias obtenidas a medida
que aumenta el tamaño de la grieta en la viga experimental y el porcentaje respecto de las
frecuencias teóricas de la viga sin grieta.
Teórico a/h=0.0 a/h=0.1 a/h=0.2 a/h=0.3 a/h=0.4 a/h=0.5
Modo Hz Hz % Hz % Hz % Hz % Hz % Hz %
1 22.46 20.5 91.28% 20.5 91.28% 19.8 88.16% 19.4 86.38% 18.3 81.48% 17.2 76.59%
2 140.75 127 90.23% 124.5 88.46% 122.3 86.89% 120 85.33% 117 83.27% 112.8 80.14%
3 394.09 350.1 88.84% 347.2 88.10% 333.3 84.57% 329 83.46% 327 82.98% 325.9 82.70%
Si se analizan los datos para a/h=0.0, vemos que existe una diferencia similar respecto de los
resultados teóricos, ahora, usando esa diferencia como factor de corrección (F.C.) obtenemos la
siguiente tabla:
a/h=0.0 a/h=0.1 a/h=0.2 a/h=0.3 a/h=0.4 a/h=0.5
Hz F.C. Hz % Hz % Hz % Hz % Hz %
22.46 1.10 22.24 99.02% 21.69 96.59% 20.9 93.17% 20 89.27% 18.84 83.90%
140.7 1.11 138 98.03% 135.5 96.30% 133 94.57% 130 92.28% 125 88.82%
394.1 1.12 389.7 98.89% 381.2 96.72% 372 94.50% 367 93.14% 363.6 92.25%
Esta información más la obtenida a través de Ansys será analizada en el siguiente capítulo de
Resultados.

38
CAPITULO IV: Resultados
En el presente capítulo se realizarán las comparaciones entre los resultados obtenidos a través de
Ansys y los obtenidos en forma experimental.
Para analizar mejor los resultados, primero se comparará y analizarán los modos en forma
independiente y luego se analizarán los cambios en forma paralela.
4.1 Análisis del Primer Modo de vibrar
El siguiente gráfico muestra los cambios en las frecuencias a medida que aumenta el tamaño de la
grieta.
Disminución de frecuencia v/s tamaño de la grieta Modo 1
15.00
17.00
19.00
21.00
23.00
a/h
Frec
uenc
ia (H
z)
AnsysExperimental
Ansys 22.51 22.46 22.30 22.03 21.59 20.90
Experimental 20.50 20.50 19.80 19.40 18.30 16.80
0 0.1 0.2 0.3 0.4 0.5
Aquí se puede apreciar que a medida que aumenta el tamaño de la grieta en la viga, la frecuencia
disminuye más en la viga experimental que en la modelada en Ansys. Esto último se puede
distinguir en el siguiente gráfico donde se muestran los cambios relativos que sufre la frecuencia
a medida que aumenta el tamaño de la grieta, respecto de la frecuencia sin grieta para ambos
casos.
Frecuencia relativa v/s tamaño de grieta Modo 1
0.800
0.850
0.900
0.950
1.000
a/h
Frec
uenc
ia r
elat
iva
AnsysExperimental
Ansys 1.000 0.998 0.991 0.979 0.959 0.928
Experimental 1.000 1.000 0.966 0.946 0.893 0.859
0 0.1 0.2 0.3 0.4 0.5

39
De este gráfico se observa que la diferencia entre las variaciones aumenta desde un 0% hasta un
7% aproximadamente, a medida que la grieta aumenta desde a/h=0.1 hasta a/h=0.5
respectivamente.
4.2 Análisis del Segundo Modo de vibrar
Al igual que en el caso anterior, a continuación se compararán los cambios en las frecuencias en
Ansys y experimentalmente, a medida que aumenta el tamaño de la grieta.
Disminución de la frecuencia v/s tamaño de la grietaModo 2
100.00
110.00
120.00
130.00
140.00
150.00
a/h
Frec
uenc
ia (H
z)
AnsysExperimental
Ansys 140.69 140.36 139.40 137.77 135.31 131.77
Experimental 127.00 124.50 122.30 120.10 117.20 112.80
0 0.1 0.2 0.3 0.4 0.5
En este caso, sigue existiendo una diferencia en la forma que disminuye la frecuencia a medida
que aumenta el tamaño de la grieta, se puede apreciar que en forma experimental la disminución
sigue siendo mayor, aunque menos notorio que para el primer modo. Para aclarar esto se realizará
una comparación relativa de cómo varía la frecuencia en ambos casos.
Frecuencia relativa v/s tamaño de grieta Modo 2
0.800
0.850
0.900
0.950
1.000
a/h
Frec
uenc
ia re
lativ
a
AnsysExperimental
Ansys 1.000 0.998 0.991 0.979 0.962 0.937
Experimental 1.000 0.980 0.963 0.946 0.923 0.888
0 0.1 0.2 0.3 0.4 0.5
En este caso la diferencia entre ambos métodos disminuye a medida que aumenta el tamaño de la
grieta que varía entre un 0% hasta un 5% entre a/h=0 y a/h=0.5 respectivamente, es decir la
diferencia disminuye en 2% en relación al primer modo.

40
4.3 Análisis del Tercer modo de vibrar
Ahora se analizará el último modo observable experimentalmente de la misma forma que en los
dos casos anteriores. Primero con un gráfico donde aparecen las frecuencias de ambos casos,
Ansys y experimental, a medida que aumenta el tamaño de la grieta. Y luego se compararán la
disminución porcentual de la frecuencia en cada modo.
Disminución de la frecuencia v/s tamaño d ela grieta Modo 3
200.00
250.00
300.00
350.00
400.00
a/h
Frec
uenc
ia (H
z)
AnsysExperimental
Ansys 392.68 391.75 389.10 384.77 378.56 370.23
Experimental 350.10 347.20 344.20 338.40 333.30 325.90
0 0.1 0.2 0.3 0.4 0.5
En este gráfico no se aprecia una diferencia muy notoria, por lo tanto usaremos el gráfico de las
frecuencias relativas para despejar dudas.
Frecuencia relativa v/s tamaño de grieta Modo 3
0.800
0.850
0.900
0.950
1.000
a/h
Frec
uenc
ia r
elat
iva
AnsysExperimental
Ansys 1.000 0.998 0.991 0.980 0.964 0.943
Experimental 1.000 0.992 0.983 0.967 0.952 0.931
0 0.1 0.2 0.3 0.4 0.5
Ahora podemos ver que la disminución porcentual experimental se acerca aún más a la de Ansys,
siendo esta prácticamente de 1.2% de diferencia entre ambas cuando la grieta alcanza su tamaño
final de 0.5.
De estos tres análisis se puede ver claramente que el efecto de la grieta en la frecuencia
disminuye a medida que se analiza un modo superior. Este efecto se aprecia mucho más claro en
la grieta experimental que en la grieta MEF, en donde los cambios relativos de la frecuencia

41
obtenidos experimentalmente se acercan más a los obtenidos por MEF a medida que se analiza un
modo superior. Esta afirmación se aprecia en los siguientes gráficos.
Variación de frecuencias según a/hMétodo MEF
0.800
0.850
0.900
0.950
1.000
0 0.1 0.2 0.3 0.4 0.5 0.6
a/h
Frec
uenc
ia r
elat
iva
Modo 1Modo 2Modo 3
Variación de frecuencias según a/hMétodo experimental
0.800
0.850
0.900
0.950
1.000
0 0.1 0.2 0.3 0.4 0.5 0.6
a/h
Frec
uenc
ia
rela
tiva
Modo 1Modo 2Modo 3
En estos gráficos se aprecia la diferencia entre ambos métodos, a través del MEF se observan
cambios relativos prácticamente iguales para los tres modos, en cambio a través del método
experimental se observa una marcada diferencia en los cambios relativos y más aún, si lo
comparamos con los resultados del MEF.

42
CAPITULO V: Conclusiones
Se ha logrado usar equipos que tiene como finalidad el análisis y detección de fallas en máquinas
para obtener parámetros modales de una estructura simple como es una viga en voladizo a través
de una prueba llamada Prueba de Impacto (Bump Test) el cual no necesita medir el impacto del
golpe, solo analiza la información de respuesta del sistema a través de un acelerómetro.
Al comparar los resultados de Ansys con lo teoría de la viga Bernoulli-Euler podemos decir que
Ansys entrega buenos resultados hasta el cuarto modo, ya en el quinto comienza a haber una
diferencia considerable de un 20%.
Si bien ambos modelos de grietas, el MEF y el experimental, no son una fiel copia de la realidad,
la verdad es que sirven para evaluar un supuesto daño en una viga, ya que en ambos casos se
observan gráficos con las mismas tendencias a medida que aumenta la grieta.
Aunque ambos resultados tengan la misma tendencia se observa que en el método experimental
la grieta tiene una mayor influencia en el cambio de frecuencia llegando a existir una diferencia
de un 7% respecto de Ansys.
La obtención de los modos de vibrar a través del sistema multicanal VibraSPEC de la empresa
KINETEC, podría ser realizado con el equipo de un solo canal VibraSPEC del Instituto de Cs.
Ns. y Ms. siempre y cuando se pueda diseñar un sistema en que la fuerza de impacto sea siempre
la misma, de esta forma las respuestas en los distintos puntos estarían relacionados con la misma
fuerza.
La técnica de la Prueba de Impacto (Bump Test) resulta útil para detectar una grieta en una
estructura simple siempre que pueda contar con un modelo en MEF de la estructura para poder
tener los modos de vibrar intactos, en caso de no contar con este modelo se puede realizar una
análisis de la estructura en buen estado antes de comenzar a ser utilizado, de esta forma se crea
una base de datos con los modos y frecuencias sin daño.
Personalmente creo que la técnica de la Prueba de Impacto (Bump Test) podría ser perfectamente
implementada en un laboratorio de análisis de vibraciones o de dinámica estructural para
entender en forma experimental el concepto de resonancia y frecuencia natural de un sistema.

43
BIBLIOGRAFIA
• Apuntes de “DINAMICA DE ESTRUCTURAS”. Marcos Salas. Instituto Cs. Navales y
Marítimas, UACH
• DINAMICA ESTRUCTURAL: Teoría y Cálculo (1992). Mario Paz.
• VIBRATIONS: EXPERIMENTAL MODAL ANALYSIS. Randall J. Allemang, Profesor
University of Cincinnati
• VIBRATIONS ANALYSYS HANDBOOK, 1era Edición. James Taylor.
• SHOCK & VIBRATION HANDBOOK (2002). Cypril M. Harris, Allan G. Piersol
• MODAL ANALYSIS (2001). Jimin He, Zhi-Fang Fu
• MODAL TESTING: Theory and Practice (1984). Ewins, D. J.
• FINITE ELEMENT MODELING FOR STRESS ANALISIS (1995). Robert D. Cook
• ANSYS THEORY REFERENCE (2004)
• STRUTCTURAL TESTING Part 2: Modal Analysis and Simulation. Brüel & Kjaer.
• Practical Solutions to Machinery and Maintenance Vibration Problems. Ralph T.
Buscarello.2002
• VIBRACIONES BASICAS DE MAQUINAS. Carlos Coppie, Vibration Institute.
• Tesis de Grado “Técnicas de actualización aplicados a la detección de daños”
E.T.S.I. Aeronáuticos (2004). Ricardo Atienza P.
• Tesis de Grado “Diseño e implementación de un sistema de medición de FRF y aplicación
en Análisis Modal de Vibraciones” UACH (2008). Roberto Pereira T.
• Manual de operación: VibraCHECK. IDEAR
• Manual de operación: VibraSPEC. IDEAR
REFERENCIA ELECTRONICA
• Laboratorio de Control y Análisis Modal de la Universidad de Massachussets Lowell:
http://macl.caeds.eng.uml.edu/
• Connection Technology Center, Inc.
https://www.ctconline.com
• http://www.azimainc.com/