Estudio de disponibilidad de medidas de localización en ... · ámbito de la geolocalización en...
6
Resumen—Este artículo realiza un estudio estadística basado en datos reales sobre la disponibilidad de señales empleadas en el ámbito de la geolocalización en redes celulares. En concreto se ha evaluado la disponibilidad de estaciones base (técnicas terrestres de localización) y de satélites (técnicas basadas en GPS) en tres escenarios distintos. Para dichos escenarios se proporciona la función de densidad de probabilidad individual y conjunta para la disponibilidad de ambos tipos de fuente de señal, así como información estadística adicional que complementa a dicha función. Esta información es de gran importancia debido al creciente interés en la hibridación de técnicas de localización en redes celulares. Los resultados indican que el grado de mejora en la cobertura de la técnica de localización por hibridación depende tanto del mecanismo de hibridación como del tipo de escenario, obteniéndose mayores beneficios cuanto más restringido es éste último. * Palabras clave—Sistema de Posicionamiento Global, E-OTD, disponibilidad, técnicas híbridas de localización, satélite, Estación Base. I. INTRODUCCIÓN n los últimos años los servicios de localización en redes inalámbricas (LCS) se están convirtiendo en un servicio clave para todo operador. La razón del creciente interés en este tipo de servicios reside en el hecho de que la información de localización constituye un servicio en sí mismo (p. ej. un usuario desea conocer su posición en un determinado instante), al tiempo que dicha información puede emplearse para la construcción de servicios de valor añadido en los que el usuario no solicite la posición de forma explícita, pero el servicio solicitado sí requiera de ella para llevarse a cabo (p. ej. guiado, farmacia de guardia más cercana, etc.) [1]. Además, las exigencias establecidas por parte de diversos reguladores (p. ej. FCC, UE, etc.) hacen que los servicios de localización estén cada vez más presentes en las redes celulares públicas actuales. La disponibilidad de este tipo de servicios puede ser aprovechada por los operadores de red más allá de la percepción económica que se espera de ellos. De esta forma, la información de localización de los usuarios de la red puede emplearse para optimizar el funcionamiento de la misma [2, Esta investigación ha sido financiada parcialmente por el proyecto 6th FP IST Liaison y por FEDER y el gobierno español a través del proyecto TEC2006-09466/T. I. Martin-Escalona y F. Barcelo-Arroyo desempeñan labores docentes y de investigación en el departamento de ingeniería telemática de la Universidad Politécnica de Cataluña, c/Jordi Girona 1-3, Edificio C3, 08034, Barcelona (correos e.: [email protected] y [email protected]). 3], empleando por ejemplo sistemas inteligentes de buscapersonas (paging), modelos de traspaso basados en la localización del usuario y la previsión de sus movimientos, la reserva de recursos en función del patrón de movimiento de los distintos usuarios de la celda, etc. Las técnicas de localización basadas en triangulación generalmente proporcionan mayor precisión que aquellas basadas en información residente en la red, como es el caso de la familia de técnicas basadas en la identificación de celda, avance temporal, nivel de señal recibido, etc. Pese a todo, las técnicas basadas en triangulación no pueden ejecutarse en cualquier entorno puesto que no hay garantías de que la estación móvil sobre la que se desea obtener la posición sea capaz de divisar suficientes fuentes como para poder ejecutar la técnica de localización. Para minimizar el impacto de estas zonas de sombra se propuso el uso de técnicas de localización híbridas, cuyo propósito es el de emplear triangulación con la particularidad de emplear para ello señales procedentes de múltiples sistemas. De esta forma, la información sobre la disponibilidad de satélites y estaciones base (los sistemas más habitualmente empleados) es esencial para evaluar y comparar el rendimiento de los distintos métodos de localización basados en triangulación en redes celulares. Son pocas las referencias que abarquen este problema [4] y normalmente se basan en técnicas de localización y sistemas que actualmente pueden considerarse como desfasados. De igual manera, los estudios que trabajan la cobertura de sistemas de localización suelen hacerlo de forma autónoma, en escenarios y condiciones muy definidos para cada uno de los casos, lo que hace que un estudio combinado de diversas técnicas de localización no pueda llevarse a cabo. Este artículo pretende cubrir esta carencia, proporcionando datos sobre la disponibilidad de satélites GPS y estaciones base GSM/GPRS de forma simultánea en un conjunto representativo de escenarios urbanos restrictivos. El resto del artículo se estructura de la siguiente forma. La Sección 2 proporciona una breve descripción de los mecanismos empleados para combinar información procedente de diversas técnicas de localización. La Sección 3 presenta las principales hipótesis sobre las que se basa el posterior análisis a realizar. La sección 4 por su parte presenta un completo análisis sobre la cobertura proporcionada por los diversos mecanismos de hibridación empleados en la actualidad, comparando los resultados obtenidos con los E Estudio de disponibilidad de medidas de localización en redes celulares urbanas I. Martin-Escalona, F. Barcelo-Arroyo IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 6, OCTOBER 2007 465
Transcript of Estudio de disponibilidad de medidas de localización en ... · ámbito de la geolocalización en...
Resumen—Este artículo realiza un estudio estadística basado en datos reales sobre la disponibilidad de señales empleadas en el ámbito de la geolocalización en redes celulares. En concreto se ha evaluado la disponibilidad de estaciones base (técnicas terrestres de localización) y de satélites (técnicas basadas en GPS) en tres escenarios distintos. Para dichos escenarios se proporciona la función de densidad de probabilidad individual y conjunta para la disponibilidad de ambos tipos de fuente de señal, así como información estadística adicional que complementa a dicha función. Esta información es de gran importancia debido al creciente interés en la hibridación de técnicas de localización en redes celulares. Los resultados indican que el grado de mejora en la cobertura de la técnica de localización por hibridación depende tanto del mecanismo de hibridación como del tipo de escenario, obteniéndose mayores beneficios cuanto más restringido es éste último.*
Palabras clave—Sistema de Posicionamiento Global, E-OTD, disponibilidad, técnicas híbridas de localización, satélite, Estación Base.
I. INTRODUCCIÓN n los últimos años los servicios de localización en redes inalámbricas (LCS) se están convirtiendo en un servicio clave para todo operador. La razón del
creciente interés en este tipo de servicios reside en el hecho de que la información de localización constituye un servicio en sí mismo (p. ej. un usuario desea conocer su posición en un determinado instante), al tiempo que dicha información puede emplearse para la construcción de servicios de valor añadido en los que el usuario no solicite la posición de forma explícita, pero el servicio solicitado sí requiera de ella para llevarse a cabo (p. ej. guiado, farmacia de guardia más cercana, etc.) [1]. Además, las exigencias establecidas por parte de diversos reguladores (p. ej. FCC, UE, etc.) hacen que los servicios de localización estén cada vez más presentes en las redes celulares públicas actuales.
La disponibilidad de este tipo de servicios puede ser aprovechada por los operadores de red más allá de la percepción económica que se espera de ellos. De esta forma, la información de localización de los usuarios de la red puede emplearse para optimizar el funcionamiento de la misma [2,
Esta investigación ha sido financiada parcialmente por el proyecto 6th FP
IST Liaison y por FEDER y el gobierno español a través del proyecto TEC2006-09466/T.
I. Martin-Escalona y F. Barcelo-Arroyo desempeñan labores docentes y de investigación en el departamento de ingeniería telemática de la Universidad Politécnica de Cataluña, c/Jordi Girona 1-3, Edificio C3, 08034, Barcelona (correos e.: [email protected] y [email protected]).
3], empleando por ejemplo sistemas inteligentes de buscapersonas (paging), modelos de traspaso basados en la localización del usuario y la previsión de sus movimientos, la reserva de recursos en función del patrón de movimiento de los distintos usuarios de la celda, etc.
Las técnicas de localización basadas en triangulación generalmente proporcionan mayor precisión que aquellas basadas en información residente en la red, como es el caso de la familia de técnicas basadas en la identificación de celda, avance temporal, nivel de señal recibido, etc. Pese a todo, las técnicas basadas en triangulación no pueden ejecutarse en cualquier entorno puesto que no hay garantías de que la estación móvil sobre la que se desea obtener la posición sea capaz de divisar suficientes fuentes como para poder ejecutar la técnica de localización. Para minimizar el impacto de estas zonas de sombra se propuso el uso de técnicas de localización híbridas, cuyo propósito es el de emplear triangulación con la particularidad de emplear para ello señales procedentes de múltiples sistemas.
De esta forma, la información sobre la disponibilidad de satélites y estaciones base (los sistemas más habitualmente empleados) es esencial para evaluar y comparar el rendimiento de los distintos métodos de localización basados en triangulación en redes celulares. Son pocas las referencias que abarquen este problema [4] y normalmente se basan en técnicas de localización y sistemas que actualmente pueden considerarse como desfasados. De igual manera, los estudios que trabajan la cobertura de sistemas de localización suelen hacerlo de forma autónoma, en escenarios y condiciones muy definidos para cada uno de los casos, lo que hace que un estudio combinado de diversas técnicas de localización no pueda llevarse a cabo. Este artículo pretende cubrir esta carencia, proporcionando datos sobre la disponibilidad de satélites GPS y estaciones base GSM/GPRS de forma simultánea en un conjunto representativo de escenarios urbanos restrictivos.
El resto del artículo se estructura de la siguiente forma. La Sección 2 proporciona una breve descripción de los mecanismos empleados para combinar información procedente de diversas técnicas de localización. La Sección 3 presenta las principales hipótesis sobre las que se basa el posterior análisis a realizar. La sección 4 por su parte presenta un completo análisis sobre la cobertura proporcionada por los diversos mecanismos de hibridación empleados en la actualidad, comparando los resultados obtenidos con los
E
Estudio de disponibilidad de medidas de localización en redes celulares urbanas
I. Martin-Escalona, F. Barcelo-Arroyo
IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 6, OCTOBER 2007 465

esperados al emplear técnicas individuales como A-GPS y E-OTD (TDOA en redes GSM/GPRS). Por último, la Sección 5 presenta las principales conclusiones obtenidas tras el estudio realizado.
II. MECANISMOS DE TRIANGULACIÓN CON FUENTES HETEROGÉNEAS
La precisión demandada por un servicio de localización (LCS) depende en gran medida del valor añadido que pretenda ofrecer dicho servicio. De esta forma, dicha precisión puede abarcar desde los pocos metros hasta el centenar de metros. Por otra parte hay que tener presentes las características de las distintas técnicas de localización en cuanto a precisión y disponibilidad, muy dispares entre las diversas soluciones [5, 6, 7, 8]. La precisión de las técnicas basadas en la medida del nivel de señal [9] como el NMR (Network Measurement Reports) se ve muy mermada debido a la variabilidad del enlace radio y todos los factores que influyen sobre éste. La familia de soluciones basadas en identificación de celda (Cell-ID) presenta una cobertura total a nivel de localización, si bien presenta unas capacidades en cuanto a precisión muy limitadas. Frecuentemente se emplean medidas auxiliares como el avance temporal (AT) o el RTT (round trip time) para mejorar las cifras de precisión de las técnicas de identificación de celda, si bien las mejoras obtenidas suelen ser muy leves y dependen del escenario sobre el que actúen. Esto hace que este tipo de técnicas no puedan ser empleadas para cubrir un amplio espectro de servicios. Las técnicas basadas en el ángulo de llegada (AoA) combinan la información angular con medidas temporales como el avance temporal para llevar a cabo la localización, pero el alto coste de estas soluciones suelen relegarlas a mercados muy específicos. También existen soluciones que combinan medidas de potencia y tiempo, tal y como se muestra en [10].
De forma general se puede afirmar que los métodos basados en triangulación proporcionan mejores resultados en cuanto a precisión que los basados en otras soluciones. Sin embargo, esta mejora en precisión frecuentemente se encuentra acompañada por una disminución en la disponibilidad de la técnica de localización. Por ejemplo, técnicas como Cell-ID, AT/RTT o NMR presentan una disponibilidad total, mientras que no hay garantías de recibir tres o más estaciones base (BS) o satélites (SAT), de forma directa, desde una misma estación móvil y en todo punto a posicionar. Las técnicas basadas en triangulación de fuentes de señal terrestres, como es el caso de E-OTD en redes GSM/GPRS o OTDOA en redes UMTS, funcionan de manera muy similar: el posicionamiento 2D es posible si tres o más estaciones base están en línea de visión con el terminal. El GPS asistido funciona de forma similar al GPS pero requiere de una red celular terrestre para proporcionarle los datos de asistencia (i.e. almanacs, etc.). Esa información adicional permite aumentar la sensibilidad del receptor GPS y por ende reducir el Time-to-First-Fix (TTFF) y mejorar la precisión de la posición obtenida. Sin embargo, las condiciones de trabajo
de las técnicas A-GPS son por lo general peores que la de sus homólogos GPS: los terminales móviles se guardan frecuentemente en bolsillos, carteras, zonas de interior donde GPS no es capaz de recibir señal, etc. De esta forma, se puede afirmar que el rendimiento de A-GPS es excelente en zonas de exterior sin obstáculos apreciables con el cielo, pero deja mucho que desear en zonas de interior y zonas urbanas densas.
El uso de la triangulación de señales para el posicionamiento no queda relegado a emplear señales procedentes de un mismo conjunto de fuentes de señal. Por contra, de forma general se puede afirmar que existen tres mecanismos para combinar información de posicionamiento empleando triangulación. Esos mecanismos se presentan de forma escueta en los siguientes parágrafos. Para un nivel de detalle mayor se recomienda al lector consultar la referencia [11].
A. Combinación Este tipo de hibridación constituye la aproximación más
simple al problema de la fusión de información de localización. Consiste en combinar las posiciones obtenidas por dos métodos de posicionamiento (e.g. E-OTD y A-GPS) para así mejorar la precisión o ampliar la cobertura presente en las técnicas individuales. La combinación efectuada a nivel de posicionamiento puede ser cualquiera, si bien la más típica consiste en una suma ponderada por el error asociado a cada una de las posiciones. Debe tenerse en cuenta que para que esta técnica híbrida funcione es requisito indispensable que al menos una de las técnicas a combinar pueda llevarse a cabo en el escenario en el que se sitúa el usuario.
B. Hibridación no sincronizada Este mecanismo de hibridación se basa en la hipótesis de
que ambos sistemas a combinar no se encuentran sincronizados. Bajo esta hipótesis, este sistema de hibridación asume que cada método de localización es capaz de generar al menos una hipérbola de posiciones posibles del usuario. Una descripción detallada de esta solución puede encontrarse en [12] donde los autores hacen uso del sistema Digital Audio Broadcast (DAB) en lugar de los satélites GPS. Sin embargo lo indicado en dicha referencia puede extenderse fácilmente a sistemas como A-GPS, OTDOA, etc.
Este mecanismo tiene como ventaja directa el necesitar de un mínimo de 2 fuentes de señal en cada uno de los sistemas para obtener la posición del usuario: en caso de un sistema híbrido A-GPS/E-OTD, bastaría con 2 BS y 2 SAT para posicionar. Este hecho supone a priori un aumento en la cobertura de la técnica, puesto que se tienen en consideración múltiples situaciones en las que no sería posible obtener un posicionamiento con ninguna de las dos técnicas de localización a hibridizar. Debe notarse que esta mejora en disponibilidad no tiene una implicación directa en la precisión, puesto que ésta vendrá determinada por los algoritmos empleados para la fusión de las medidas realizadas por cada
466 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 6, OCTOBER 2007

una de las técnicas de localización.
C. Hibridación sincronizada Este método trabaja bajo la hipótesis de que los distintos
métodos de localización a fusionar están sincronizados. De esta forma, todas las fuentes de señal, BS y SAT pueden ser consideradas como pertenecientes a una misma red. La mejora en disponibilidad es obvia, puesto que bajo este supuesto se permite el posicionamiento de un usuario con tan sólo disponer de 3 fuentes de señal a la vista, con independencia del tipo del que sean éstas: BS o SAT [12, 13]. La contrapartida es que la sincronización de varios métodos de localización exige el cálculo de la asincronía entre los métodos de localización empleados, así como un protocolo que permita la difusión de dicha información entre los elementos involucrados en el posicionamiento [14].
III. HIPÓTESIS Y ESCENARIOS
El presente artículo centra su exposición en posicionamiento 2D. Sin embargo, la metodología seguida y las conclusiones extraídas pueden ser aplicadas a posicionamiento 3D con relativa facilidad. El estudio realizado proporciona únicamente datos de cobertura. La precisión obtenida en cada uno de los posibles posicionamientos no es tenida en cuenta. La GDOP (Geometric Dilution of Precision) no se tiene en cuenta a lo largo del estudio: siempre que se puede posicionar se hace con la suficiente precisión, con independencia de la disposición de las fuentes o las condiciones del medio. Las medidas de precisión y el impacto de la GDOP en éstas queda fuera del objetivo de este artículo. Debe notarse de igual manera que los datos presentados en la Sección IV e implícitamente en la Tabla II, deben interpretarse como límites superiores. Esto es debido a que mientras no se dispone de suficientes fuentes de señal en visión directa (es decir, sin obstáculos) entre transmisor y receptor, el sistema es incapaz de realizar el posicionamiento, aunque, por otra parte, el razonamiento inverso no siempre es cierto.
Para el resto del estudio se establecen dos hipótesis: (1) el dispositivo a posicionar está en todo momento en la zona de cobertura del operador de red y (2) dicho dispositivo permanece estático durante el posicionamiento. La primera hipótesis es consecuencia directa de realizar el estudio en una red celular: sin cobertura de al menos una BS, el usuario no formaría parte de la red celular. La segunda hipótesis tiene su razón de ser en el hecho de que el propósito de este estudio es el de analizar la disponibilidad de fuentes para la localización en un determinado escenario y no el impacto del patrón de movimiento del usuario en dicha disponibilidad.
El estudio presentado en este artículo se basa en tres escenarios: urbano denso en el exterior, urbano enmascarado en el exterior y urbano interior suave. El primero de ellos representa lo que comúnmente se conoce bajo el nombre de urban-canyon, es decir un escenario compuesto por edificios altos (ocho o más pisos) y calles estrechas, donde el efecto de la propagación multicamino está muy presente. El segundo de
los escenarios describe un entorno exterior con alta densidad de BS donde la visibilidad directa con los satélites se encuentra enmascarada. Este bloqueo se plasma en el caso analizado en un techo de hormigón situado a la entrada de un edificio de oficinas. El escenario de interior suave representa el área de descanso de un edificio, próxima a un conjunto de ventanas que dan salida al exterior. Las medidas fueron tomadas a una distancia de 10 metros de las ventanas más próximas.
El presente estudio se centra en el análisis de entornos restrictivos. Aunque ese tipo de escenarios representan un escaso porcentaje del territorio (p. ej. las áreas rurales representan la mayor parte del territorio cubierto por las redes móviles), generan la mayor parte del tráfico que circula por la red. Todas las medidas presentadas en este estudio fueron tomadas en París (Francia). La red terrestre implementa la técnica de localización E-OTD, mientras que A-GPS se utilizó como técnica representativa de la red de satélites. Los datos obtenidos para cada uno de los escenarios se presentan en los siguientes apartados.
Todos los experimentos se llevaron a cabo durante un periodo de tiempo prudencial (varias horas), de tal forma que las condiciones de propagación pueden considerarse como estables. Los bajos valores presentes en la desviación estándar corroboran esta hipótesis. Las medidas fueron tomadas un mínimo de dos días distintos en el mes de Junio de 2006. Para cada escenario, se tomaron un número de muestras suficientes como para garantizar un intervalo de confianza de ±0,05 veces el valor medio con un 99% de confianza.
TABLA I FUENTES NECESARIAS PARA TRIANGULAR (2D)
Método Requerimientos Terrestre 3 BS Satélite 3 SAT Combinación Terrestre o Satélite Hibridación no síncrona Combinación o (2 BS y 2 SAT) Hibridación síncrona 3 fuentes (BS o SAT)
IV. MEDIDAS DE POSICIONES REALES
Análisis estadístico Los siguientes valores han sido calculados para cada uno
de los escenarios.
1) Histograma sobre la disponibilidad conjunta del número de fuentes. Dichos histogramas se presentan en las Figuras 1 a 3 y muestran la disponibilidad conjunta del número de satélites y de estaciones base. Dicha información permite obtener información sobre la cobertura real de cada uno de los métodos de localización individuales, así como los que emplean alguno de los mecanismos de hibridación anteriormente descritos.
2) Resumen de estimaciones relevantes. La Tabla II muestra la probabilidad de disponer de un determinado número de estaciones base (NBS) y satélites (NSAT). La última fila de esta tabla muestra la probabilidad de recibir un cierto número de estaciones base con independencia del número de satélites. De forma análoga, la última columna de la Tabla II
MARTIN-ESCALONA AND BARCELO-ARROYO : ON THE STUDY OF LOCATION MEASUREMENTS 467

muestra la disponibilidad de satélites con independencia del número de estaciones base a la vista. Para simplificar el análisis se ha agrupado la probabilidad de tener más de dos fuentes de señal, puesto que dicha condición establece el mínimo para el posicionamiento 2D en técnicas individuales.
3) La media, desviación estándar y correlación entre disponibilidad de satélites y estaciones base se han calculado para cada escenario. Los datos obtenidos se muestran en la Tabla III. La correlación muestra la dependencia existente entre la disponibilidad de fuentes de los distintos sistemas y ha sido calculada mediante la expresión
yx
xyxyC
σσσ2
= , (1)
donde σ representa la desviación estándar. TABLA II
FUNCIÓN DE PROBABILIDAD EMPLEADA PARA EL CÁLCULO DE LA COBERTURA
NBS = 1 NBS = 2 NBS > 2 NSAT = 0 0.1054 0.0024 0.0026 0.1102NSAT = 1 0.0043 0.0000 0.0000 0.0043NSAT = 2 0.0028 0.0000 0.0000 0.0028
Urbano denso
exterior NSAT > 2 0.4528 0.0311 0.3986 0.8826
0.5654 0.0333 0.4013 1.0000 NSAT = 0 0.0361 0.0034 0.0001 0.0394NSAT = 1 0.0371 0.0191 0.0371 0.0934NSAT = 2 0.1749 0.2022 0.1714 0.5484
Urbano enmasca
rado exterior NSAT > 2 0.2091 0.0648 0.0448 0.3187
0.4571 0.2894 0.2534 1.0000 NSAT = 0 0.0728 0.0062 0,0001 0.0791NSAT = 1 0.0895 0.0321 0.0325 0.1541NSAT = 2 0.2411 0.2656 0.1753 0.6820
Urbano interior
suave NSAT > 2 0.0550 0.0267 0.0030 0.0847
0.4584 0.3307 0.2109 1.0000
TABLA III MEDIA, DESVIACIÓN ESTÁNDAR Y CORRELACIÓN DE ESTACIONES BASE Y
SATÉLITES
Media σ σxy Cxy
BS 2.48 1.85 Urbano denso SAT 6.27 2.50
1.25 0.34
BS 1.82 0.86 Urbano enmascarado SAT 2.48 1.30
0.49 -0.22
BS 1.79 0.75 Urbano interior suave SAT 1.75 0.78
0.29 0.15
A. Urbano denso en exterior Este escenario representa un escenario de tipo urban-
canyon, es decir un entorno compuesto de edificios de gran altura y calles estrechas. La Fig. 1 muestra las restricciones impuestas por este escenario en cuanto a nivel de señal recibida se refiere: la mayor parte del tiempo tan sólo una estación base se encuentra disponible (56,64%). Este hecho constata la baja cobertura que se puede esperar de las técnicas de localización basadas en triangulación terrestre. De hecho la probabilidad de recibir 3 o más estaciones base terrestres es tan sólo del 40,12%. Por otra parte, la probabilidad de recibir señal simultáneamente de 3 o más satélites alcanza el 88,26%, lo cual significa que la mayor parte de las peticiones de localización podrían ser atendidas por A-GPS.
La Fig. 1 y la Tabla III muestran como la disponibilidad de estaciones base y satélites está correlada positivamente, es decir, cuando mejoran las condiciones de propagación, mejora la disponibilidad de ambos sistemas y viceversa. Este hecho, unido a la alta disponibilidad de satélites (con una media de 6, 6,27 satélites disponibles) hace que la hibridación de medidas
no aporte mejoras sustanciales en cuanto a disponibilidad. Esta conjunción (alta disponibilidad de satélites y correlación positiva) indica que no es probable que E-OTD sea capaz de complementar las zonas de sombra de A-GPS, puesto que una caída en la recepción de satélites vendría acompañada, con una alta probabilidad, de una disminución en el número de estaciones base visibles.
B. Urbano enmascarado en exterior Este escenario representa un entorno de exterior cubierto
por una estructura que impide la visibilidad directa con el cielo. Los datos correspondientes a este escenario fueron tomados a la salida de un edificio, donde un techado de hormigón cubría el acceso al mismo. De acuerdo a los datos incluidos en la Fig. 2, la cobertura en este escenario se encuentra muy limitada, sobre todo en caso de emplear técnicas individuales. Si se atiende al valor medio del número
de recursos disponibles en este escenario y se compara con el escenario anterior, se puede apreciar claramente el aumento en cuanto restricciones del escenario enmascarado. De esta
Fig. 1. Histograma en el escenario urbano denso
Fig. 2. Histograma en el escenario urbano enmascarado
468 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 6, OCTOBER 2007
forma, en el escenario analizado, técnicas como E-OTD y A-GPS tan sólo alcanzan coberturas del 25,34% y 31,87% respectivamente.
En escenarios con este tipo de restricciones sería interesante poder obtener el máximo beneficio de las técnicas de hibridación. Para el caso analizado y tal y como se recoge la Tabla III, existe una correlación negativa entre la disponibilidad de satélites y estaciones base. Esto implica que una reducción en el número de satélites viene acompañada de forma frecuente, de una mejora en la disponibilidad de estaciones base y viceversa. Este hecho, unido a la escasa disponibilidad de estaciones base y satélites (1,82 y 2,48 en media respectivamente), favorece la aplicación de mecanismos híbridos de localización. Así, mediante una simple combinación de posiciones se obtiene una disponibilidad conjunta del 52,73 %. Este valor se mejora de forma apreciable mediante la aplicación de mecanismos de hibridación, tanto asíncronos como síncronos, obteniendo unos niveles de cobertura del 72,95% y 92,35% respectivamente. Tal y como puede apreciarse, en el presente escenario, la provisión de servicios de localización sería inviable sin el uso de técnicas de localización híbridas, puesto que sólo mediante el uso de este tipo de técnicas se alcanzarían cotas de disponibilidad aceptables.
C. Escenario urbano interior suave Este escenario define un entorno de interior en el que los
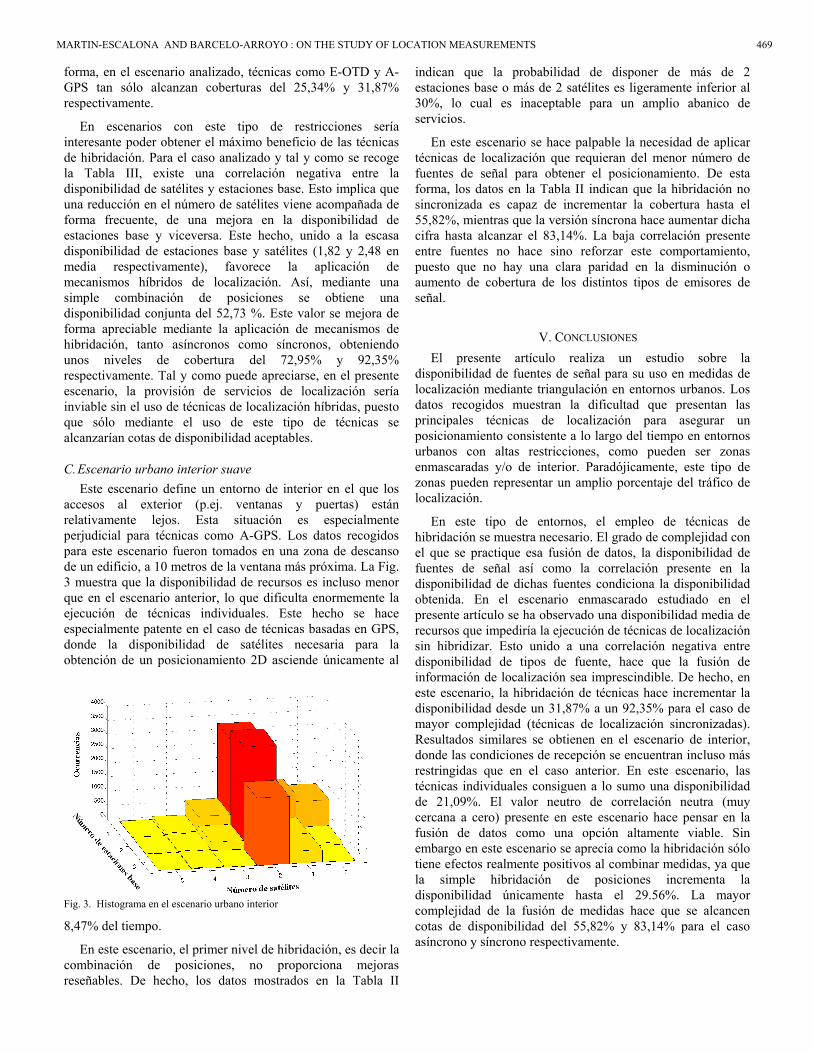
accesos al exterior (p.ej. ventanas y puertas) están relativamente lejos. Esta situación es especialmente perjudicial para técnicas como A-GPS. Los datos recogidos para este escenario fueron tomados en una zona de descanso de un edificio, a 10 metros de la ventana más próxima. La Fig. 3 muestra que la disponibilidad de recursos es incluso menor que en el escenario anterior, lo que dificulta enormemente la ejecución de técnicas individuales. Este hecho se hace especialmente patente en el caso de técnicas basadas en GPS, donde la disponibilidad de satélites necesaria para la obtención de un posicionamiento 2D asciende únicamente al
8,47% del tiempo.
En este escenario, el primer nivel de hibridación, es decir la combinación de posiciones, no proporciona mejoras reseñables. De hecho, los datos mostrados en la Tabla II
indican que la probabilidad de disponer de más de 2 estaciones base o más de 2 satélites es ligeramente inferior al 30%, lo cual es inaceptable para un amplio abanico de servicios.
En este escenario se hace palpable la necesidad de aplicar técnicas de localización que requieran del menor número de fuentes de señal para obtener el posicionamiento. De esta forma, los datos en la Tabla II indican que la hibridación no sincronizada es capaz de incrementar la cobertura hasta el 55,82%, mientras que la versión síncrona hace aumentar dicha cifra hasta alcanzar el 83,14%. La baja correlación presente entre fuentes no hace sino reforzar este comportamiento, puesto que no hay una clara paridad en la disminución o aumento de cobertura de los distintos tipos de emisores de señal.
V. CONCLUSIONES El presente artículo realiza un estudio sobre la
disponibilidad de fuentes de señal para su uso en medidas de localización mediante triangulación en entornos urbanos. Los datos recogidos muestran la dificultad que presentan las principales técnicas de localización para asegurar un posicionamiento consistente a lo largo del tiempo en entornos urbanos con altas restricciones, como pueden ser zonas enmascaradas y/o de interior. Paradójicamente, este tipo de zonas pueden representar un amplio porcentaje del tráfico de localización.
En este tipo de entornos, el empleo de técnicas de hibridación se muestra necesario. El grado de complejidad con el que se practique esa fusión de datos, la disponibilidad de fuentes de señal así como la correlación presente en la disponibilidad de dichas fuentes condiciona la disponibilidad obtenida. En el escenario enmascarado estudiado en el presente artículo se ha observado una disponibilidad media de recursos que impediría la ejecución de técnicas de localización sin hibridizar. Esto unido a una correlación negativa entre disponibilidad de tipos de fuente, hace que la fusión de información de localización sea imprescindible. De hecho, en este escenario, la hibridación de técnicas hace incrementar la disponibilidad desde un 31,87% a un 92,35% para el caso de mayor complejidad (técnicas de localización sincronizadas). Resultados similares se obtienen en el escenario de interior, donde las condiciones de recepción se encuentran incluso más restringidas que en el caso anterior. En este escenario, las técnicas individuales consiguen a lo sumo una disponibilidad de 21,09%. El valor neutro de correlación neutra (muy cercana a cero) presente en este escenario hace pensar en la fusión de datos como una opción altamente viable. Sin embargo en este escenario se aprecia como la hibridación sólo tiene efectos realmente positivos al combinar medidas, ya que la simple hibridación de posiciones incrementa la disponibilidad únicamente hasta el 29.56%. La mayor complejidad de la fusión de medidas hace que se alcancen cotas de disponibilidad del 55,82% y 83,14% para el caso asíncrono y síncrono respectivamente.
Fig. 3. Histograma en el escenario urbano interior
MARTIN-ESCALONA AND BARCELO-ARROYO : ON THE STUDY OF LOCATION MEASUREMENTS 469

REFERENCIAS [1] C. Drane, M. Macnaughtan, and C. Scott, “Positioning GSM
Telephones,” IEEE Communications Magazine, vol. 36, pp. 46-59, Apr. 1998.
[2] D.J.Y. Lee and W.C.Y. Lee, “Optimize CDMA System Capacity with Location,” in Proc. 2001 of IEEE PIMRC Conf., pp. 17-21.
[3] S.S. Wang, M. Green, and M. Malkawi, “Mobile positioning technologies and location services,” in Proc. 2002 IEEE Radio and Wireless Conference Conf., pp. 9-12.
[4] T.E. Melgard, G. Lachapelle, and H. Gehue, “GPS signal availability in urban area – Receiver performance analysis,” in Proc. 1994 IEEE Position Location and Navigation Symposium Conf., pp. 1-7.
[5] D. Kothris, M. Beach, B. Allen, and P. Karlsson, “Performance Assessment of Terrestrial and Satellite Based Position Location Systems,” in Proc. 2001 IEE International Conference on 3G Mobile Communications Technology.
[6] D. Porcino, “Location of Third Generation Mobile Devices: A Comparison between Terrestrial and Satellite Positioning Systems,” in Proc. 2001 the IEEE Vehicular Technology Conference.
[7] H. Yin, “Location Based Service,” T-109.551 Research Seminar on Location Business II, Helsinki University of Technology, 2002.
[8] Y. Zhao, “Standardization of Mobile Phone Positioning for 3G Systems,” IEEE Communications Magazine, pp. 108-116, Jul. 2000.
[9] T. Roos, P. Myllymäki, and H. Tirri, “A Statistical Modeling Approach to Location Estimation,” IEEE Trans. on Mobile Computing, vol. 1, no. 1, pp. 59-69, Jan. 2002.
[10] M. McGuire, K.N. Plataniotis, and A.N. Venetsanopoulos, “Data fusion of power and time measurements for mobile terminal location,” IEEE Trans. on Mobile Computing, vol. 4, no. 2, pp. 142-152, Mar. 2005.
[11] F. Barcelo and I. Martin-Escalona, “Coverage of Hybrid Terrestrial-Satellite Location in Mobile Communications,” in Proc. 2004 5th European Wireless Conference: Mobile and Wireless Systems Beyond 3G, pp. 475-479.
[12] S. Rooney, P. Chippendale, R. Choony, C. Le Roux, and B. Honary, “Accurate vehicular positioning using a DAB-GSM hybrid system,” in Proc. 2000 IEEE Vehicular Technology Conference, pp. 97-101.
[13] Y. Zhao, “Mobile Phone Location Determination and Its Impact on Intelligent Transportation Systems,” IEEE Trans. on Intelligent Transportation Systems, vol. 1, no. 1, pp. 55-64, Mar. 2000.
[14] Martin-Escalona, F. Barcelo, and J. Paradells, “Delivery of non-standardized assistance data in E-OTD/GNSS hybrid systems,” in Proc. 2000 IEEE 13th PIMRC, pp. 2347-2351.
BIOGRAFÍAS
Israel Martin-Escalona trabaja actualmente como profesor a tiempo completo en el Departamento de Ingeniería Telemática de la Universidad Politécnica de Cataluña (UPC). Obtuvo el título de ingeniero en Telecomunicaciones en 2001 y actualmente cursa los estudios de Ingeniería Informática en la Facultad de Informática de Barcelona en la Universidad Politécnica de Cataluña. Inició su doctorado en Ingeniería Telemática en 2002. Desde entonces ha centrado su investigación en el ámbito de las redes celulares y más concretamente en los sistemas de
geolocalización que operan en dichas redes. Actualmente participa activamente en el desarrollo de numerosos proyectos centrados en dicha temática, financiados tanto por la Comisión Europea como por el Gobierno Español.
Francisco Barcelo-Arroyo obtuvo el título de Ingeniero de Telecomunicaciones en 1986 en la Universidad Politécnica de Cataluña. Posteriormente, en 1997 recibió el título de Doctor en Ingeniería Telemática por la misma universidad. En 1987 ingresó en la plantilla docente del departamento de Ingeniería Telemática de la Universidad Politécnica de Cataluña, centrando su labor docente en el diseño y planificación de redes de comunicación. Una vez graduado, centró su investigación en los ámbitos de conmutación y sincronismo de red. En 1997 pasó a
ser profesor asociado del departamento de Ingeniería Telemática en la UPC. Actualmente, compagina su labor en la UPC con consultorías tecnológicas en el ámbito de las telecomunicaciones, tanto a nivel nacional como Europeo. En la actualidad, su actividad investigadora se centra en el estudio y evaluación de las capacidades de las distintas redes inalámbricas: análisis de teletráfico en redes inalámbricas, modelado de tráfico, asignación de recursos, protocolos de tercera/cuarta generación y sistemas de posicionamiento en redes inalámbricas.
470 IEEE LATIN AMERICA TRANSACTIONS, VOL. 5, NO. 6, OCTOBER 2007