ESTUDIO DE ALGORITMO DE ENCAMINAMIENTO AD...
63
Alumno: Arturo Carlos Díaz Navas Tutor: Antonio Jesús Yuste Delgado Depto.: Ingeniería de Telecomunicación Septiembre, 2019 Universidad de Jaén Escuela Politécnica Superior de Linares Trabajo Fin de Grado ESTUDIO DE ALGORITMO DE ENCAMINAMIENTO AD HOC EN REDES VEHICULARES Escuela Politécnica Superior de Linares Grado en Ingeniería Telemática Escuela Politécnica Superior de Linares Grado en Ingeniería Telemática
Transcript of ESTUDIO DE ALGORITMO DE ENCAMINAMIENTO AD...

Alumno: Arturo Carlos Díaz Navas
Tutor: Antonio Jesús Yuste Delgado
Depto.: Ingeniería de Telecomunicación
Septiembre, 2019
Universidad de JaénEscuela Politécnica Superior de Linares
Trabajo Fin de Grado
ESTUDIO DE ALGORITMO DEENCAMINAMIENTO AD HOCEN REDES VEHICULARES
Esc
uel
a P
olité
cnic
a S
upe
rior
de L
inar
es
Gra
do e
n In
geni
ería
Tel
emát
ica
Esc
uel
a P
olité
cnic
a S
upe
rior
de L
inar
es
Gra
do e
n In
geni
ería
Tel
emát
ica


ESTUDIO DE ALGORITMO DE ENCAMINAMIENTO AD HOC PARA REDES VEHICULARES
Autor: Arturo Carlos Díaz Navas.
Tutor: Antonio Jesús Yuste Delgado.
Centro: Escuela Politécnica Superior de Linares.
Titulación: Grado en Ingeniería Telemática.
Departamento: Ingeniería de Telecomunicación.
Palabras clave: redes vehiculares, VANET, MANET, ad hoc, ns-3.
RESUMEN
En los Sistemas de Transporte Inteligente (ITS – Intelligent Transport Systems), las Redes
Ad Hoc Vehiculares (VANET - Vehicular Ad Hoc Networks) vendrán a convertirse en una
realidad que cambiará el paradigma del transporte. Las VANET derivan de las MANET:
redes autorganizadas cuya topología cambia continuamente debido a la movilidad de los
nodos, con ciertas características propias como la alta movilidad y la velocidad de los
vehículos. El diseño de protocolos de enrutamiento serán avalados por los diferentes
estudios y simulaciones necesarias para poder calificar su eficiencia ante cambios en la
topología y el movimiento rápido de los nodos. Se presentará una breve clasificación de los
protocolos de enrutamiento existentes en VANET. En este trabajo se presentará la
propuesta de un algoritmo de enrutamiento, que será comparado con otros ampliamente
utilizados y normalizados por la IETF: AODV y OLSR, según unas métricas bien
definidas. Finalmente, se expondrán conclusiones y líneas futuras.

AD HOC ROUTING ALGORITHM SURVEY FOR VEHICLENETWORKS
Author: Arturo Carlos Díaz Navas.
Tutor: Antonio Jesús Yuste Delgado.
Centre: Escuela Politécnica Superior de Linares.
Degree: Degree in Telematics Engineering.
Departament: Telecommunication Engineering.
Keywords: vehicular networks, VANET, MANET, ad hoc, ns-3.
ABSTRACT
In Intelligent Transport Systems (ITS), Vehicular Ad Hoc Networks (VANET) will
become a reality that will change the transport paradigm. The VANET derive from the
MANET: self-organized networks whose topology changes continuously due to the
mobility of the nodes, with certain characteristics of their own such as high mobility and
vehicle speed. The design of routing protocols will be supported by the different studies
and simulations necessary to qualify their efficiency in the face of changes in the topology
and rapid movement of the nodes. A brief classification of the routing protocols existing in
VANET will be presented. This paper will present the proposal of a routing algorithm,
which will be compared with others widely used and standardized by the IETF: AODV and
OLSR, according to well-defined metrics. Finally, conclusions and future lines will be
presented.

INDICE1 INTRODUCCION A LAS VANET...................................................................................1
2 OBJETIVOS.......................................................................................................................3
3 INTRODUCCION A LA TECNOLOGIA VANET..........................................................4
3.1 ARQUITECTURAS VANET...................................................................................4
3.2 APLICACIONES VANET........................................................................................5
3.3 DESAFÍOS DE LAS REDES VANET.....................................................................5
3.4 COMPARACION ENTRE LAS TECNOLOGIAS MANET Y VANET.................7
4 INTODUCCION A LOS PROTOCOLOS DE ENRUTAMIENTO VANET...................8
4.1 PROTOCOLOS DE ENRUTAMIENTO VEHICULO A VEHICULO (V2V)........9
4.1.1 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN LA TOPOLOGÍA
(AD-HOC)....................................................................................................................9
4.1.1.1 PROTOCOLOS DE ENRUTAMIENTO PROACTIVO (BASADO EN
TABLAS).................................................................................................................9
..................................................................................................................................9
4.1.1.2 PROTOCOLOS REACTIVOS (BAJO DEMANDA).............................10
4.1.1.3 PROTOCOLOS HIBRIDOS....................................................................10
4.1.2 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN LA POSICION....11
4.1.2.1 REDES NO TOLERANTES A RETARDO (non-DTNs).......................11
4.1.2.1.1 PROTOCOLOS BALIZA................................................................12
4.1.2.1.2 PROTOCOLOS SIN BALIZA.........................................................12
4.1.2.2 PROTOCOLOS DE ENRUTAMIENTO PARA REDES TOLERANTES
A RETARDO (DTNs)............................................................................................12
4.1.2.3 PROTOCOLOS BASADOS EN LA POSICIÓN HÍBRIDOS................13
4.1.3 PROTOCOLOS BASADOS EN CLUSTER...................................................13
4.1.4 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN
GEOPOSICIONAMIENTO.......................................................................................14
4.1.5 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN MULTICAST......15
4.1.5.1 PROTOCOLOS DE ENRUTAMIENTO MULTICAST BASDOS EN
ÁRBOL..................................................................................................................16
4.1.5.2 PROTOCOLOS DE ENRUTAMIENTO MULTICAST BASADOS EN
MALLA..................................................................................................................17
4.1.6 PROTOCOLES DE ENRUTAMIENTO BASADOS EN DIFUSIÓN...........17

4.2 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN INFRAESTRUCTURA
A VEHÍCULO (V2I).......................................................................................................17
4.2.1 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN
INFRAESTRUCTURA ESTÁTICA..........................................................................18
4.2.2 PROTOCOLOS DE ENRUTAMIENTO DE INFRAESTRUCTURA MÓVIL
.....................................................................................................................................19
4.3 COMPARACIÓN ENTRE VARIOS PROTOCOLOS DE ENRUTAMIENTO
VANET............................................................................................................................20
5 ESTUDIO DE SIMULADORES.....................................................................................22
5.1 SIMULADORES O GENERADORES DE MOVILIDAD....................................22
5.1.1 VanetMobiSim.................................................................................................22
5.1.2 NETwork Simulator for Traffic Efficiency And Mobility (NETTRA)...........23
5.1.3 MObility model generator for Vehicular networks (MOVE)..........................23
5.1.4 Citymob............................................................................................................23
5.1.5 Simulation of Urban MObility (SUMO)..........................................................23
5.2 SIMULADORES DE REDES DE COMUNICACIONES.....................................24
5.2.1 Global Mobile Information System Simulator (GLOMOSIM).......................24
5.2.2 Optimized Network Engineering Tools (OPNET)..........................................24
5.2.3 Java in Simulation Time (JiST) / Scalable Wireless Ad hoc Network
Simulator (SWANS)...................................................................................................24
5.2.4 Georgia Tech Network Simulator (GTNetS)...................................................25
5.2.5 OMNET++.......................................................................................................25
5.2.6 Network Simulator versión 2 (NS2)................................................................25
5.2.7 Network Simulator versión 3...........................................................................25
5.2.8 MATLAB.........................................................................................................26
6 ESTUDIO DE MODELOS DE MOVILIDAD................................................................26
6.1 MODELOS DE MOVILIDAD SINTÉTICOS........................................................26
6.2 MODELOS DE MOVILIDAD BASADOS EN MUESTRAS REALES...............27
7 DESCRIPCIÓN................................................................................................................28
7.1 BREVE DESCRIPCIÓN DEL SIMULADOR NS-3.............................................28
7.1.1 INTRODUCCIÓN AL SIMULADOR NS-3...................................................28
7.1.2 ENTORNO DE DESARROLLO.....................................................................30
7.1.3 ELEMENTOS CLAVE EN NS-3....................................................................30

7.2 EL PROTOCOLO WAVE Y EL ESTÁNDAR 802.11p. JUSTIFICACIÓN PARA
SU USO EN VANET......................................................................................................33
7.2.1 INTRODUCCÓN A LOS ESTÁNDARES WAVE Y 802.11p......................33
7.2.2 JUSTIFICACIÓN SOBRE SU USO EN VANET..........................................37
7.3 BREVE DESCRIPCIÓN DE LOS PROTOCOLOS A COMPARAR...................39
7.3.1 PROTOCOLO VECTOR DE DISTANCIA BAJO DE MANDA AD HOC
(AODV – AD HOC ON-DEMAND DISTANCE VECTOR)....................................39
7.3.2 PROTOCOLO DE ENRUTAMIENTO DE ESTADO DEL ENLACE
OPTIMIZADO (OLSR – OPTIMIZED LINK STATE ROUTING).........................41
7.3.3 PROPUESTA: Un protocolo basado en AODV que usa control difuso para
mejorar éste.................................................................................................................43
7.4 SIMULACIONES...................................................................................................46
7.5 CARACTERÍSTICA DEL ESCENARIO...............................................................47
8 RESULTADOS................................................................................................................47
9 CONCLUSIONES Y LINEAS DE FUTURO.................................................................49
10 REFERENCIAS BIBLIOGRÁFICAS...........................................................................50

Índice de figurasFigura 1. Red Ad Hoc Vehicular (VANET – Vehicular Ad Hoc Network)..........................1
Figura 2. Arquitectura de red VANET a) Arquitectura celular pura (V2I) b) Ad Hoc c)
Híbrida (V2I y V2V)..............................................................................................................4
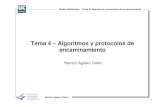
Figura 3. Taxonomía de los protocolos de enrutamiento VANET.........................................8
Figura 4. Vehículos de múltiples clústeres en enrutamiento basado en clúster...................14
Figura 5. Enrutamiento Geoposicionamiento.......................................................................15
Figura 6. RSUs en comunicación basada en infraestructura fija..........................................18
Figura 7. Pila de protocolos WAVE y 802.11p....................................................................34
Figura 8. Protocolo de enrutamiento AODV: a) propagación del mensaje RREQ y b) Ruta
seguida por el mensaje RREP a la fuente [1].......................................................................40
Figura 9. Conjuntos difusos..................................................................................................44
Figura 10: Salida del sistema difuso.....................................................................................46

Índice de tablasTabla 1. Comparación entre MANET y VANET.................................................................................7
Tabla 2. Comparación entre varios protocolos de enrutamiento VANET.........................................21
Tabla 3. Ejemplo de modelo ns-3 [36]...............................................................................................32
Tabla 4. Tabla con las reglas de la base de conocimiento..................................................................45
Tabla 5. Características de los escenarios..........................................................................................47
Tabla 6. Retardo medio......................................................................................................................48
Tabla 7. Pérdidas................................................................................................................................48
Tabla 8. Sobrecarga normalizada.......................................................................................................48

1 INTRODUCCION A LAS VANET
Una red ad hoc vehicular (VANET – Vehicular Ad Hoc Network) hace frente a la
entrega de manera precisa y en tiempo de la información como estado del tráfico y
aspectos cruciales sobre seguridad o flujo de vehículos. Las emergencias se pueden evitar
aprovechando las facilidades suministradas por las tecnologías VANET. En otras palabras,
toda la información relacionada con la movilidad del tráfico en la carretera, como la
densidad del tráfico, la velocidad y las direcciones de los vehículos, así como el clima, se
recopilan mediante el uso de tecnologías de comunicación entre vehículos y entre
vehículos y carreteras. Esto evita llegar a situaciones como accidentes, atascos,
congestiones, etc. En la Fig. 1 [1], muestra un escenario típico en redes VANET.
VANET es una nueva tecnología que integra las ventajas de las redes inalámbricas
de nueva generación en los vehículos. VANET tiene como objetivo ofrecer (i)
conectividad continua a los vehículos de los usuarios, lo que les permite conectarse con
otros usuarios, y (ii) una conexión inalámbrica eficiente entre vehículos sin acceso a
cualquier infraestructura fija, que ayude a los Sistema de Transporte Inteligente. En
consecuencia, VANET también se conoce como Comunicación Entre Vehículos (IVC –
Inter/Intra-Vehicle Communication). Los dispositivos VANET, como las unidades a bordo,
se fijan en los vehículos y funcionan como nodos para transmitir y recibir mensajes a
través de redes inalámbricas. Estos dispositivos proporcionan a los conductores y pasajeros
la información más reciente como informes meteorológicos, accidentes, atascos,
1
Figura 1. Red Ad Hoc Vehicular (VANET – Vehicular Ad Hoc Network)

congestión, etc.. En función de esta información, los conductores podrán tomar las
acciones apropiadas y evitar situaciones inesperadas [1].
Las características de VANET son generalmente similares a la tecnología de
operación de una red móvil ad hoc (MANET) en el sentido de que las condiciones de auto
organización, autogestión, bajo ancho de banda y transmisión de radio compartida siguen
siendo las mismas. Sin embargo, el impedimento operacional clave de VANET se debe a la
alta velocidad y la movilidad provisional (en contraste con el MANET) de los nodos
móviles (vehículos) a lo largo de los caminos. Este hecho indica que el diseño competente
del protocolo de enrutamiento requiere mejorar la arquitectura de MANET para adaptarse
de manera eficiente a la rápida movilidad de los nodos VANET. Este problema ha
introducido numerosos desafíos de investigación para el diseño de un protocolo de
enrutamiento adecuado [1].
El principal objetivo de los protocolos de enrutamiento es lograr un tiempo de
comunicación corto utilizando la menor cantidad de recursos de red. No todos los
protocolos diseñados para MANET se pueden implementar en VANET debido a diferentes
factores: alta movilidad, velocidad asociada a los vehículos y transferencia de información
activa.
2

2 OBJETIVOS
En este estudio se presentará una introducción en que consiste las VANET, las
tecnologías sobre las que se apoya, arquitecturas utilizadas, aplicaciones y desafíos a los
que se enfrenta.
Se hará una exposición breve del estado del arte con respecto a los diferentes
simuladores que hay disponibles, como también de las herramientas fundamentales para la
generación de patrones de movilidad.
Se expondrá los diferentes protocolos de enrutamiento utilizados en las redes
vehiculares, tanto desde el punto de vista de la movilidad como de red. A modo de visión
de conjunto, se realiza una taxonomía de los diferentes protocolos de enrutamiento.
Se propondrá la utilización de un protocolo de enrutamiento basado en AODV, el
cual se comparará con los protocolos AODV y OLSR estandarizados por la IETF. Se
realizarán diferentes simulaciones en los que se realizará la:
• Implementación de distintos escenarios de movilidad en la plataforma Network
Simulator versión 3 (ns-3).
• Implementación de varios escenarios de movilidad con distinta densidad de
nodos: obtención de datos de interés en redes de telecomunicaciones.
• Comparación de los datos obtenidos por el algoritmo propuesto con los
protocolos estándares.
• Finalmente, se establecerán las conclusiones y líneas futuras.
3

3 INTRODUCCION A LA TECNOLOGIA VANET
3.1 ARQUITECTURAS VANET
La Fig. 2 [1] ilustra las arquitecturas presentes en las VANET: redes celulares con
pasarelas fijas o de área local inalámbrica (WLAN), ad hoc puro e híbridas (combinación
de las dos primeras).
En la arquitectura celular pura (Fig. 2a), los VANET pueden utilizar puntos de
acceso inalámbricos WLAN o puertas de enlace emplazadas estáticamente y puertas de
enlace celulares permanentes. En esta arquitectura, la red podrá ser WLAN o celular. Este
tipo de arquitectura VANET se denomina comunicación de vehículo a infraestructura (V2I
– Vehicle to Infraestructure) e integra de manera efectiva tecnologías inalámbricas
emergentes heterogéneas como los sistemas celulares 3G, LTE, LTE-Advance, IEEE
802.11 e IEEE 802.16e.
La Figura 2b ilustra la arquitectura ad hoc pura en VANET o comunicación
vehículo a vehículo (V2V – Vehicle to Vehicle). Los vehículos interactúan entre sí,
obligados por las restricciones económicas para la construcción de infraestructura fija y
puntos de acceso inalámbricos. Los nodos captarán la información de interés a través de
sus sensores y de sus unidades de procesamiento de abordo.
4
Figura 2. Arquitectura de red VANET a) Arquitectura celular pura (V2I) b) Ad Hoc c)Híbrida (V2I y V2V)

La Figura 2c ilustra la arquitectura híbrida (V2I y V2V) de VANET, que ofrece una
flexibilidad superior en el intercambio de contenido. Tiene la ventaja de manejar diferentes
situaciones para el intercambio de información, incluso estando fuera del alcance de la
infraestructura fija.
3.2 APLICACIONES VANET
VANET facilita las comunicaciones entre los vehículos cercanos y entre los
vehículos y los dispositivos fijos cercanos. Los diferentes tipos de aplicaciones VANET
son categorizadas como [1]:
• Aplicaciones de seguridad. Avisan de una posible aparición de una colisión o
accidente, facilitando la cooperación entre vehículos ayudando, por ejemplo, en la
asistencia en los sistemas de frenado. También pueden advertir sobre cambio de
carril, situaciones climáticas repentinas, transmisión de vídeo de emergencia y la
gestión de incidentes, todo ello enviado al conductor o recibidas por el sistema
automático de seguridad activa.
• Aplicaciones para comodidad. Estas aplicaciones van desde el cobro de peajes
electrónicos, pago de estacionamiento y administración del tráfico.
Todas las aplicaciones de VANET tienen un conjunto común de requisitos. Los
requisitos más comunes son los siguientes: cobertura de 10–1000 m, velocidad máxima del
vehículo de 500 km/h, y latencia en el rango de 50–500 ms. En general, las aplicaciones de
seguridad no deben detenerse durante más de 200 ms. Además, la compactibilidad de la
red podría estar en el rango de pequeños grupos de 2 a 20 vehículos a atascos con hasta
miles de vehículos por celda de radio [1].
3.3 DESAFÍOS DE LAS REDES VANET
Los vehículos en VANET funcionan como nodos portátiles y al mismo tiempo
como enrutadores para otros nodos. Además de las semejanzas con las redes ad hoc, las
VANET tienen características adicionales que influyen en el diseño del sistema de
comunicación y en sus protocolos de enrutamiento. Estos desafíos incluyen [1]:
5

• Topología altamente dinámica. Las topologías de VANET no serán constantes y
siempre varían según la velocidad del vehículo. Dos vehículos solamente podrán
mantenerse en comunicación dentro de su rango de transmisión y en función de la
velocidad relativa de un vehículo a otro dentro del rango.
• Modelización y predicción de la movilidad. El modelado y la predicción de la
movilidad juegan un papel vital en el diseño del protocolo de red para las VANET,
la posición futura del vehículo se puede predecir según la velocidad y el mapa de
calles.
• Varios entornos de comunicación. Las VANET se emplean en dos entornos de
comunicación característicos representados por el entorno de la ciudad y el
entorno de autopista/autovía. Las condiciones del tráfico son muy simples en las
autopistas pero muy complejas en las ciudades y pueblos, obstáculos como
edificaciones, árboles, etc. pueden dificultar la comunicación.
• Limitaciones de retardo severas. En ciertas aplicaciones de seguridad, como la
situación de una frenada de emergencia, el retraso máximo será más importante que
el retraso promedio.
• Interacciones con los sensores de abordo. Presumiblemente, los nodos tienen
sensores a bordo que proporcionan información para ser utilizada para generar
enlaces de comunicación y facilitar el enrutamiento. En la actualidad, los
dispositivos del sistema de posicionamiento global (GPS) se utilizan ampliamente
en los vehículos, que ofrecen información sobre la ubicación con fines de
enrutamiento.
• Acceso a infraestructura. La infraestructura de comunicación a lo largo de la
carretera, como las unidades en la carretera (RSUs – Roadside Units) y los puntos
de acceso públicos, permite el acceso a servidores de red, generalmente en Internet.
La infraestructura fija no siempre estará disponible, con lo que plantea problemas
como el acceso a los sistemas de seguridad como los de criptografía centralizada.
• Altos requisitos de aplicación en la entrega de datos. Las aplicaciones VANET
son necesarias para prevenir accidentes de tráfico y garantizar la seguridad. Estas
aplicaciones tienen altos requisitos con respecto a la funcionalidad y confiabilidad
en tiempo real.
6

• No confidencialidad de la información de seguridad. Para aplicaciones de
seguridad, la información contenida en un mensaje es de interés para todos los
usuarios de la carretera y, por lo tanto, no es confidencial.
3.4 COMPARACION ENTRE LAS TECNOLOGIAS MANET Y VANET
Las VANET son extremadamente similares en varios aspectos técnicos a las
MANET. En la siguiente Tabla 1 se muestran las diferencias [1].
Parámetros MANET VANET
Coste de Producción Barato Caro
Cambio de la Topología Lento Frecuente y muy rápido
Frecuencia de cambio de la Topología Lento Alto
Densidad nodal Disperso Frecuentemente variable ydenso
Ancho de banda Cientos de kbps Miles de kbps
Tiempo de vida del nodo Depende del la energía del dispositivo
Depende del tiempo devida del vehículo
Enrutamiento multisalto Disponible Débilmente disponible
Fiabilidad Media Alta
Patrón de movimiento de los nodos Aleatorio Regular
Esquema de direccionamiento Basado en atributos
Basado en la posición
Tabla 1. Comparación entre MANET y VANET
7

4 INTODUCCION A LOS PROTOCOLOS DE ENRUTAMIENTO VANET
Dadas las diversas arquitecturas, aplicaciones y desafíos, los investigadores han
propuesto una amplia gama de protocolos de enrutamiento para VANET. Todos estos
protocolos tienen como objetivo principal maximizar el rendimiento al tiempo que
minimizan la pérdida de paquetes y controlan la sobrecarga. A diferencia de la
infraestructura cableada, no se utilizan nodos de enrutamiento dedicados, y los nodos
(vehículos) deben realizar los protocolos de enrutamiento, que pueden ser móviles y no
confiables. Como se muestra en la Fig. 3, se clasifican los protocolos de enrutamiento
VANET actuales según la arquitectura de la comunicación VANET en dos categorías
principales: protocolos de enrutamiento vehículo a vehículo (V2V) y basados en
protocolos de enrutamiento vehículo a infraestructura (V2I) [1].
8
Figura 3. Taxonomía de los protocolos de enrutamiento VANET
PROTOCOLOS DE ENRUATMIENTO
VANET
BASADO EN TOPOLOGÍA
INFRAESTRUCTURAESTÁTICA
BASADO EN GEOPOSIONAMIENTO
INFRAESTRUCTURAMÓVIL
HÍBRIDO
BASADO EN CLÚSTER
VEHÍCULO A VEHÍCULO
(V2V)
BASADO EN BROADCAST
BASADO EN MULTICAST
BASADO EN POSICIÓN
REACTIVO
PROACTIVO
SADV, RAR, VPGR, IAGR, MOVE
MIBR, MGRP, PBR
NO TOLERANTE A RETARDO
SIN BALIZA
BALIZA
BASADO EN MALLA
BASADO EN ÁRBOL
VEHÍCULO A INFRAESTRUCTURA
(V2I)
TOLERANTE A RETARDO
HÍBRIDO
BROADCOMM, UMB, DV-CAST, EAEP, HyDi, DECA
ODMRP, D-ODMRO
MAODV, ADMR, MAV-AODV, MOLSR
IVG, CGR, AGR, ROVER, Mobicast
CBR, CBDRP, LORA-CBF, COIN, TIBCRPH
GeoDTN+Nav
SKVR, VADD, GeOpps
CBF
GPSR, GPSR+AGF, GSR, SAR, A-STAR, STAR, MURU, PDGR, GPCR, GpsrJ+, PBR-DV, CAR, GyTAR, LOUVRE,
DIR, ROMSGP, JARR, EBG, B-MFR, AMAR, TO-GO
ZRP, HARP
TORA, AODV, PRAODV, DSR, AODV+PGB
DSDV, GSRP, OLSR, WRP, TBRPF

4.1 PROTOCOLOS DE ENRUTAMIENTO VEHICULO A VEHICULO (V2V)
Los protocolos V2V realizan comunicación de vehículo a vehículo, no utilizando
infraestructura fija. Se puede dividir en cinco grupos [1]:
(1) Protocolos de enrutamiento basados en la topología (ad-hoc)
(2) Protocolos de enrutamiento basado en la posición
(3) Protocolos de enrutamiento basado en geoposicionamiento.
(4) Protocolos de enrutamiento basado en multicast.
(5) Protocolos de enrutamiento basado en difusión (broadcast).
4.1.1 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN LA TOPOLOGÍA (AD-HOC)
Esta clase de protocolos de enrutamiento emplea la información de enlace que
existe en la red para ejecutar el reenvío de paquetes, y los protocolos se clasifican en [1]:
(1) Enrutamiento Proactivo (basado en tablas)
(2) Enrutamiento Reactivo (bajo demanda), y
(3) Enrutamiento híbrido
4.1.1.1 PROTOCOLOS DE ENRUTAMIENTO PROACTIVO (BASADO EN TABLAS)
Este tipo depende principalmente de los algoritmos de ruta más corta. La
información de todos los nodos asociados se almacena en forma de tablas. Estas tablas
también se distribuyen con sus vecinos, y los nodos renuevan sus tablas de enrutamiento
cuando cambia la topología de la red.
Los protocolos proactivos no tienen un retraso inicial en el descubrimiento de rutas,
pero consumen un ancho de banda significativo para las actualizaciones periódicas de la
topología.
9

Los protocolos de enrutamiento proactivo pueden ser inadecuados para nodos de
alta movilidad porque el enrutamiento por vector de distancia requiere una cantidad
considerable ancho de banda para compartir información de enrutamiento con los vecinos.
Además, la tabla es grande en el caso de redes grandes, y puede requerirse una cantidad
considerable de memoria y procesamiento en el caso de enrutamiento de estado de enlace.
Como en VANET, los nodos (vehículos) tienen una gran movilidad y se mueven a gran
velocidad. El protocolo de enrutamiento proactivo no es adecuado para esto. En esta
categoría se encuentran: DSDV, GSRP, FSR, OLSR, WRP y TBRPF [1].
4.1.1.2 PROTOCOLOS REACTIVOS (BAJO DEMANDA)
En los protocolos renuevan regularmente la tabla de enrutamiento bajo demanda.
Sin embargo, estos protocolos utilizan un método de inundación para el descubrimiento de
rutas que inicia una mayor sobrecarga de enrutamiento y también sufren el proceso de
descubrimiento de rutas inicial. Por lo tanto, se vuelven inadecuados para aplicaciones de
seguridad en VANET. Estos tipos de protocolos de enrutamiento actualizan continuamente
su información de enrutamiento y el conocimiento de cada nodo vecino. Por lo tanto, este
tipo de enrutamiento reactivo se puede adoptar en redes ad hoc altamente móviles como
VANET. Los diferentes tipos de protocolos de enrutamiento reactivo son TORA, AODV,
PROAODV, DSR y AODV+ PGB [1].
4.1.1.3 PROTOCOLOS HIBRIDOS
Los protocolos de enrutamiento híbrido son una combinación de los protocolos de
enrutamiento reactivo y proactivo para hacer que el enrutamiento sea más escalable y
eficiente. La mayoría de los protocolos de enrutamiento híbridos están basados en zonas, lo
que significa que el número de nodos se divide en diferentes zonas para que el
descubrimiento y el mantenimiento de las rutas sean más confiables [1].
La característica general de los protocolos híbridos es que reducen la sobrecarga de
red causada por el enrutamiento proactivo y reactivo, maneja el retardo de red causado por
los protocolos de enrutamiento reactivo y realiza el descubrimiento de rutas de manera más
eficiente.
10

El inconveniente de estos protocolos es que no están diseñados para entornos
caracterizados por un comportamiento altamente dinámico de los nodos y una topología
que cambia rápidamente, como VANET. En otras palabras, estos protocolos de
enrutamiento están diseñados específicamente para redes donde los nodos no son altamente
móviles, y el tamaño de la red depende de un número limitado de nodos. Los protocolos de
enrutamiento híbrido más conocidos son ZRP y HARP [1].
4.1.2 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN LA POSICION
En los protocolos de enrutamiento basados en la posición, todos los nodos
reconocen sus propias ubicaciones y las ubicaciones geográficas del nodo vecino a través
de dispositivos que señalan la posición, como el GPS. No administra ninguna tabla de
enrutamiento ni intercambia información relacionada con el estado del enlace con los
nodos vecinos. La información del dispositivo GPS se utiliza para tomar decisiones de
enrutamiento. Este tipo de enrutamiento funciona mejor ya que no es necesario crear y
mantener una ruta global desde el nodo de origen al nodo de destino. Los protocolos de
enrutamiento basados en la posición se pueden clasificar como protocolos de enrutamiento
de red no tolerante al retardo (non DTN – non-Delay Tolerant Network), protocolos de
enrutamiento de red tolerante al retardo (DTN – Delay Tolerant Network) y protocolos de
enrutamiento híbrido [1].
4.1.2.1 REDES NO TOLERANTES A RETARDO (non-DTNs)
Los protocolos de enrutamiento de posición no DTN no utilizan conectividad
alterna y sólo son realistas en VANET poblados de manera eficiente. Estos protocolos
pretenden transmitir paquetes de datos al destino tan pronto como sea posible. La
perspectiva básica en el enfoque codicioso de los protocolos de enrutamiento que no son
DTN es que un nodo avanza su paquete a su vecino, que está cerca del destino. Sin
embargo, la estrategia de reenvío podría no tener éxito si los vecinos no están más cerca
del destino que el nodo. Por lo tanto, podemos afirmar que el paquete ha alcanzado el
máximo local en el nodo, ya que ha logrado el mayor crecimiento local en el nodo actual.
Los protocolos de enrutamiento en este grupo tienen su enfoque de recuperación individual
11

para abordar dichos fallos. Los protocolos de enrutamiento que no son DTN se pueden
clasificar como protocolos de baliza, sin baliza e híbridos.
4.1.2.1.1 PROTOCOLOS BALIZA
Los protocolos de baliza se refieren a una transmisión cíclica de balizas corta Hello.
La baliza señala la existencia y ubicación de un nodo. El acceso se aislará de la tabla
vecina del nodo receptor si no obtuvo una baliza después de un período específico del nodo
equivalente. Los protocolos que se encuentran en esta categoría son: GPSR, GPSR+AGF,
GSR, SAR, A-STAR, STAR, MURU, PDGR, GPCR, GpsrJ+, PBR-DV, CAR, GyTAR,
LOUVRE, DIR, ROMSGP, JARR, EBG, B-MFR, AMAR, TO-GO [1]
4.1.2.1.2 PROTOCOLOS SIN BALIZA.
En el enrutamiento basado en la posición, la baliza permite el intercambio de una
variedad de información entre un nodo y sus vecinos. El entorno de VANET se caracteriza
por una alta movilidad, por lo que la información de la baliza puede perder validez
rápidamente. Este tipo de protocolo no usa mensajes de baliza regulares para rastrear la
ubicación y la información de los nodos del vecino. El protocolo de enrutamiento sin
balizas más popular es el reenvío basado en contención o CBF [1]
4.1.2.2 PROTOCOLOS DE ENRUTAMIENTO PARA REDES TOLERANTES A RETARDO (DTNs)
DTN es un enfoque de la arquitectura de red de computadoras que busca abordar
los problemas técnicos en redes heterogéneas que pueden carecer de conectividad de red
continua, lo que resulta en una falta de rutas de extremo a extremo instantáneas. Ejemplos
de tales redes son aquellas que operan en entornos móviles o terrestres extremos, o redes
planificadas en el espacio. Los protocolos de enrutamiento se desarrollan para VANET que
se consideran una forma de DTN. Dados los entornos desafiantes de este tipo de red, se
ven afectados por la pérdida regular de la conexión. Para resolver este problema, la entrega
de paquetes se incrementa al permitir que los nodos almacenen los paquetes cuando
pierden el contacto con otros nodos, para tomar los paquetes una cierta distancia siempre
que se encuentren con otros nodos, y para reenviar los paquetes dependiendo de ciertas
12

métricas a los nodos vecinos; Esto se llama la estrategia de llevar y reenviar. Los más
conocidos de estos protocolos son SKVR, VADD y GeOpps [1].
4.1.2.3 PROTOCOLOS BASADOS EN LA POSICIÓN HÍBRIDOS
Los paquetes se enrutan a través de los modos codicioso y de recuperación por geo-
enrutamiento. En el modo codicioso, un paquete se entrega al destino con avidez
seleccionando un vecino que tenga un mejor movimiento hacia el destino entre todos los
vecinos. Sin embargo, dados los obstáculos, el paquete puede alcanzar un máximo local
donde ningún vecino está más cerca del destino que él mismo. En tal caso, el modo de
recuperación se emplea para extraer paquetes del máximo local y, en última instancia, para
volver al modo codicioso. Después de un proceso de aplanado, los paquetes se entregan a
través de los obstáculos hacia el destino. De manera similar, la entrega de paquetes está
asegurada siempre que la red esté conectada, pero la presunción de que la red está activa
puede no ser correcta en todo momento. Debido a las características móviles de VANET,
es normal que la red esté desconectada o particionada predominantemente en redes
dispersas. Los modos codicioso y de recuperación son inadecuados en VANET. En
consecuencia, la estrategia de enrutamiento no DTN, que se muestra en los dos modos de
vista previa, se fusiona con la estrategia de enrutamiento DTN para recuperarse de este
problema. GeoDTN+ Nav es uno de los protocolos de enrutamiento basado en posición
híbridos más conocidos [1].
4.1.3 PROTOCOLOS BASADOS EN CLUSTER
En general, los protocolos de enrutamiento basados en clústeres son más adecuados
para la topología de clústeres de red. Como se muestra en la Fig. 4, cada clúster tiene una
cabeza de clúster que es responsable de los propósitos de administración intra e inter-
clúster. Los nodos intra-cluster interactúan entre sí a través de enlaces directos, mientras
que la interacción inter-cluster se realiza a través de los encabezados de clúster.
En los protocolos de enrutamiento basados en clústeres, los vehículos cercanos
forman un clúster. Sin embargo, en los protocolos de enrutamiento basados en clústeres, la
configuración de los clústeres y la elección de la cabeza de clúster es un tema importante.
Dada la alta movilidad de VANET, la configuración del clúster dinámico se convierte en
13

un proceso importante. Los protocolos que se encuentran aquí son: CBR, CBDRP, LORA-
CBF, COIN, TIBCRPH [1].
4.1.4 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN GEOPOSICIONAMIENTO
Fundamentalmente, el enrutamiento basado en geoposicionamiento es un
enrutamiento multicast basado en la posición empleado para reenviar un mensaje a todos
los vehículos en un área topográfica fija. El objetivo principal de este enfoque es distribuir
el paquete desde el nodo de origen a todos los demás nodos en un área geográfica o zona
de relevancia particular (ZOR – Zone Of Relevance). El ZOR se define como una región
geográfica donde los vehículos deben recibir los mensajes de geoposición.
En el enrutamiento de geoposicionamiento (Fig. 5), los vehículos fuera del ZOR no
reciben alertas para evitar reacciones rápidas innecesarias. La geoposición se considera un
servicio de multidifusión dentro de una región geográfica específica. Normalmente define
una zona de reenvío donde dirige la inundación de paquetes para reducir la sobrecarga de
mensajes y la congestión de la red causada por la simple inundación de paquetes en todas
partes. En la zona de destino, se puede usar el enrutamiento unicast para reenviar el
paquete.
Un inconveniente del geoposicionamiento es la partición de la red y la presencia de
vecinos desfavorables, lo que puede dificultar el correcto reenvío de mensajes. Los
14
Figura 4. Vehículos de múltiples clústeres en enrutamiento basado en clúster.

distintos protocolos de enrutamiento por geoposicionamiento son: IVG, CGR, AGR,
ROVER y Mobicast [1].
4.1.5 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN MULTICAST
La transmisión de multidifusión en VANET suele ser una transmisión desde una
sola fuente a múltiples destinos dentro de una región geográfica específica y generalmente
se realiza a través del enrutamiento de geoposicionamiento. Los protocolos tradicionales de
multidifusión se diseñaron para redes cableadas que tienen una topología de red estable.
Los VANET son considerablemente diferentes de tales redes. Por esta razón, los
protocolos de multidifusión tradicionales no funcionan de manera eficiente en entornos de
vehículos. Los protocolos de multidifusión de VANET deben adaptarse a las características
de estos tipos de redes considerando una alta movilidad de nodos, alta velocidad de
movimiento, frecuentes cambios topológicos que requieren actualizaciones constantes de la
ruta de entrega y deben mantener la información de estado del enlace lo más precisa
posible. Los VANET son beneficiosos para los protocolos de multidifusión debido a su
naturaleza inalámbrica, que permite que un mensaje enviado por un nodo se transmita a
todos los nodos dentro del rango. Los nodos VANET no tienen que ahorrar energía porque
15
Figura 5. Enrutamiento Geoposicionamiento.

los vehículos proporcionan una fuente de alimentación sustancial para duraciones
prolongadas, lo que les permite realizar tareas de cómputo complejas.
En los protocolos de enrutamiento de multidifusión MANET inalámbricos, un
grupo de multidifusión se compone de remitentes y receptores. Para conectar remitentes y
receptores, cada protocolo construye un árbol o una malla como la estructura de
enrutamiento. Los nodos de reenvío en la estructura de enrutamiento no están interesados
en paquetes de multidifusión, sino que funcionan como enrutadores para reenviar dichos
paquetes a los receptores. Los miembros del grupo (remitentes y receptores) y los nodos de
reenvío también se denominan nodos de árbol o de malla en función de la estructura de
enrutamiento. En función de la estructura de enrutamiento de multidifusión, los protocolos
de enrutamiento de multidifusión pueden clasificarse como basados en árbol o en malla.
Los protocolos de enrutamiento de multidifusión más comunes son el vector de distancia a
pedido bajo demanda ad hoc (MAODV), el enrutamiento de multidifusión adaptado a la
demanda (ADMR) y la multidifusión con la optimización de la colonia de hormigas para
VANET basados en MAODV (MAV-MAODV), MOLSR, ODMRP, y D-ODMRP [1].
4.1.5.1 PROTOCOLOS DE ENRUTAMIENTO MULTICAST BASDOS EN ÁRBOL
Un protocolo de enrutamiento de multidifusión basado en árbol establece y
mantiene un árbol de enrutamiento de multidifusión compartido para entregar datos desde
una fuente a receptores en un grupo de multidifusión. Los protocolos basados en árboles
funcionan mal en VANET porque tienen que reconstruir el árbol de distribución
frecuentemente como resultado de la alta movilidad de los nodos, lo que conduce a
interrupciones continuas del servicio. Sin embargo, ciertos protocolos basados en árboles
intentan proporcionar multidifusión para redes móviles. Entre los bien conocidos
protocolos de enrutamiento de multidifusión basados en árbol se encuentran MAODV,
ADMR y MAV-MAODV [1].
16

4.1.5.2 PROTOCOLOS DE ENRUTAMIENTO MULTICAST BASADOS EN MALLA
Un protocolo de enrutamiento de multidifusión basado en malla sostiene una malla
que consiste en un componente conectado de la red que contiene todos los receptores en un
grupo. Algunos ejemplos de enfoques de enrutamiento de multidifusión basados en malla
son el protocolo de enrutamiento de multidifusión a pedido (ODMRP) y el protocolo de
enrutamiento de multidifusión a pedido bajo demanda (D-ODMRP) [1].
4.1.6 PROTOCOLES DE ENRUTAMIENTO BASADOS EN DIFUSIÓN
El enrutamiento basado en la difusión se usa normalmente en VANET para
compartir información sobre las condiciones de la carretera, el clima y las situaciones
urgentes con los vehículos, y para publicidad y anuncios. Los protocolos de enrutamiento
basados en difusión siguen el método de difusión simple mediante inundación, en el que
cada nodo retransmite el mensaje a otros nodos. Este proceso garantiza la llegada del
mensaje a todos los destinos, pero tiene un costo general más alto. Además, es adecuado
solo para un número menor de nodos en la red. Una mayor densidad de nodos produce más
transmisiones de mensajes que conducen a colisiones, mayor utilización del ancho de
banda y una disminución en el rendimiento general del sistema. Los protocolos de
enrutamiento basados en difusión incluyen BROADCOMM, UMB, DV-CAST, EAEP, HyDi
y DECA [1].
4.2 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN INFRAESTRUCTURA A VEHÍCULO (V2I)
Los protocolos de enrutamiento VANET mejoran su rendimiento hasta cierto
punto, pero sufren la partición de la red debido a la alta movilidad. La investigación actual
tiende a combinar ambos enfoques (V2V, V2I) para obtener el resultado deseado; Una red
híbrida es mucho más eficiente. Esta sección explica algunos protocolos de enrutamiento
vehicular que explotan las formas de comunicación V2V y V2I. Las redes vehiculares son
de naturaleza altamente dinámica, y esta característica causa frecuentes cambios
topológicos que afectan el enrutamiento y la proporción de entrega de paquetes. Además,
el rendimiento de los protocolos de enrutamiento vehicular es susceptible a la densidad
17

vehicular. Los protocolos de enrutamiento vehicular muestran una variación significativa
del rendimiento en redes dispersas y densas. Dados todos los factores relacionados con el
tráfico, las VANET no pueden manejar la partición de la red. Una solución es desplegar los
puntos de acceso a lo largo de la carretera para hacer que la comunicación vehicular sea
más confiable y reducir el retraso no deseado en diferentes aplicaciones vehiculares. A
diferencia de las redes de sensores y ad hoc, la energía no es un problema porque los
vehículos tienen una fuente de energía recargable. Por lo tanto, la implementación de la
infraestructura de comunicación a lo largo de la carretera aumenta la proporción de entrega
de paquetes y disminuye el retraso. Estos protocolos se pueden clasificar en protocolos de
enrutamiento basados en infraestructura estática y basados en infraestructura móvil. Los
siguientes protocolos se basan en la infraestructura, ya que dependen de la infraestructura
permanente de sus algoritmos de enrutamiento [1].
4.2.1 PROTOCOLOS DE ENRUTAMIENTO BASADOS EN INFRAESTRUCTURA ESTÁTICA
Como se muestra en la Fig. 6, los protocolos en esta categoría utilizan RSUs en
cruces y a lo largo de las carreteras para enrutar paquetes a vehículos accesibles dentro del
rango de transmisión.
18
Figura 6. RSUs en comunicación basada en infraestructura fija.

La colocación de las RSU fijas, que están vinculadas a la red troncal en posiciones
precisas, es necesaria para la comunicación. El número y la distribución de las RSU
dependen del protocolo de comunicación que se debe emplear. Por ejemplo, ciertos
protocolos requieren que las RSU se asignen de manera uniforme en toda la red de
carreteras, mientras que otros requieren RSU solo en las intersecciones, y otros requieren
RSU solo en los límites de la región. Se puede suponer que la infraestructura prevalece
hasta cierto nivel y los vehículos tienen acceso a ella ocasionalmente.
El uso de RSU para VANET proporciona dos beneficios potenciales. En el primer
caso, la mayor altura de la antena aumenta el alcance y la confiabilidad de las
comunicaciones de vehículos a infraestructura en comparación con los IVC. Además, las
RSU desplegadas están conectadas a un mayor ancho de banda y una red troncal más
confiable para proporcionar a las autoridades de tráfico un acceso centralizado y permitir la
configuración y el mantenimiento de estas unidades. Los protocolos de enrutamiento
basados en infraestructura estática más conocidos son SADV, RAR, VPGR, IAGR y MOVE
[1]
4.2.2 PROTOCOLOS DE ENRUTAMIENTO DE INFRAESTRUCTURA MÓVIL
Las RSU minimizan significativamente la demora de extremo a extremo, pero
nuevamente, el problema heredado de las RSU es el número necesario para cubrir un área
y el costo asociado con cada RSU. Dichos costos incluyen los costos de hardware,
instalación, operación y mantenimiento. Otro problema es que los protocolos basados en
RSU fijas solo pueden proporcionar conectividad en las áreas donde se han implementado.
Las áreas donde los puntos de acceso no están instalados están fuera del alcance y, por lo
tanto, la información no se puede recopilar ni proporcionar. Los protocolos de
enrutamiento basados en infraestructura móvil superan la restricción de las RSU fijas. Los
protocolos de enrutamiento de infraestructura móvil aprovechan el concepto de pasarelas
móviles en las que las RSU se reemplazan con vehículos móviles que funcionan como
pasarelas móviles. Los siguientes protocolos: MIBR, MGRP y PBR basados en
infraestructura móvil, dependen de la infraestructura móvil para sus algoritmos de
enrutamiento [1].
19

4.3 COMPARACIÓN ENTRE VARIOS PROTOCOLOS DE ENRUTAMIENTO VANET
A continuación, mostramos una tabla comparativa resumida entre los diferentes protocolos de enrutamiento VANET [1]:
Protocolos de enrutamiento VANET
Parámetros Característicos Requerimientos de Enrutamiento
Entorno de ComunicaciónConciencia del
TráficoEstrategia de reenvÍo
Estrategia Buffering
Cubierto no Cubierto
PredictivoRequerido Infraestructura Virtual
Requiere Mapas Requiere GPSRequiere Servicios de Localización
DSDV, GSRP, FSR, OLSR, WRP,TBRPF, ZRP, HARP
No Multisalto No No No No No No No Ciudad
TORA, AODV, DSR, AODV+ PGB
No Multisalto Sí No No No No No No Ciudad
PRAODV No Codicioso Sí No Sí No No No No Ciudad
GPSR No Codicioso No No No No No Sí Sí Autopista
GPSR + AGF No Codicioso No No No No No Sí Sí Ciudad
GSR No Codicioso No Sí No No Sí Sí Sí Ciudad
SAR No Codicioso No No No No Sí Sí Sí Ciudad
A-STAR, STAR
Sí Codicioso No Sí No No Sí Sí Sí Ciudad
MURU No Codicioso No No Sí No Sí Sí Sí Ciudad
GPCR No Codicioso No Sí No No Sí Sí Sí Ciudad
GpsrJ+ No Codicioso No Sí Sí No No Sí Sí Ciudad
CBF No Codicioso No No No No No No Sí Ciudad
SKVR No Codicioso Sí No No No No No No Ciudad
VADD Sí Codicioso Sí No Sí No Sí Sí Sí Ciudad

GeOpps, GeoDTN+ Nav, LORA-CBF
No Codicioso Sí No No No Sí No Sí Ciudad
CGR, AGR, ROVER, Mobicast
No Multisalto No No No No No Sí No Ciudad
MAV-AODV No Multisalto No No No No No Sí Sí Ciudad
MAODV, ADMR, MOLSR, ODMRP, D-ODMRP
No Multisalto No No No No No No No Ciudad
BROADCOMM, UMB, DV-CAST, EAEP, HyDi, DECA
No Multisalto Sí No No No No No No Autopista
SADV, RAR, IAGR
SíAlmacena y
reenvíaNo No No RSUs estáticas Sí Sí Sí Ciudad
VPGR, MOVENo
Almacena yreenvía
No No Sí RSUs estáticas No Sí No Ciudad
MIBR, MGRPSí
Almacena yreenvía
No No SíInfraestructura
MóvilSí Sí Sí Ciudad
PBRNo
Almacena yreenvía
No No SíInfraestructura
MóvilSí Sí Sí Autopista
Tabla 2. Comparación entre varios protocolos de enrutamiento VANET
21

5 ESTUDIO DE SIMULADORES
Es evidente que el estudio de las redes vehiculares no se puede realizar en
instancias reales, el número de vehículos, el espacio necesario y la infraestructura de la que
hay que disponer lo imposibilitan. Por tanto, los investigadores han utilizado simuladores
para poder comprobar cómo se comportan los distintos protocolos que van proponiendo.
La mayoría de los simuladores de este tipo de redes dividen la simulación en dos partes
bien diferenciadas [2]:
La forma de moverse los vehículos en el espacio asignado. Los vehículos se suelen
mover en función de distintos criterios cómo se estudiará más adelante. No es lo
mismo un modelo de movilidad válido sólo para una autopista que para el tráfico
dentro de una ciudad.
La forma de intercambiar los paquetes de comunicaciones, es decir, el tráfico de
datos, entre sí. En este caso se suelen usar simuladores de redes de carácter generar.
Algunos simuladores engloban las dos características anteriores, pero son más limitados en
prestaciones. Este tipo de simuladores suele ser desarrollado para un uso específico, por
ejemplo, MobiReal [3] se utiliza para evaluar aplicaciones en redes MANET. Otras
herramientas como VEhicles in Network Simulation (VEiNS) [4] ponen en conjunto dos
de los simuladores previos como son OMNET y SUMO que comentamos a continuación.
5.1 SIMULADORES O GENERADORES DE MOVILIDAD
A lo largo de los últimos años han surgido muchos simuladores que implementan
muchos tipos de modelos de movilidad, desde los sintéticos hasta los basados en modelos
realísticos. A continuación, expondremos algunos de estos simuladores, con su
localización web y un breve comentario.
5.1.1 VanetMobiSim
Es uno de los primeros simuladores que se ha encontrado en la literatura científica
(principios de siglo), aunque no es muy utilizado y tuvo una vida útil corta [5]. Este
22

simulador permitía asimismo interacción con la infraestructura, incluía señales sencillas de
tráfico, calles con múltiples carriles, adecuación de la velocidad de los vehículos en
función de las distancias entre ellos, etc
5.1.2 NETwork Simulator for Traffic Efficiency And Mobility (NETTRA)
Este simulador desarrollado por investigadores de la Universidad de Kobe junto a
Toyota se utiliza para estudiar la congestión en grandes áreas con gran número de
vehículos [6]. Se empleó para calcular cómo se podría reducir la contaminación
atmosférica debido al uso de los vehículos.
5.1.3 MObility model generator for Vehicular networks (MOVE)
MOVE [7] es un simulador desarrollado en Laboratory for Experimental Network
and System (LENS) de Tainan (Taiwan), fue ampliamente utilizado aunque su última
versión es de 2012. Utiliza modelos realísticos en los que se incluyen edificios, vegetación,
etc., que reducen la señal en un ambiente real.
5.1.4 Citymob
Es un simulador limitado en el que todas las calles son bidireccionales y la
velocidad de los vehículos son aleatorias dentro de unos márgenes, es un simulador que se
empezó a usar en 2008 y no ha tenido mayor repercusión [8].
5.1.5 Simulation of Urban MObility (SUMO)
SUMO, quizás sea actualmente el mejor generador de movilidad para redes
vehiculares [9]. Es una herramienta de uso público que permite la simulación de grandes
escenarios y su integración con muy distintos tipos de elementos como pueden ser los
peatones, semáforos, etc. La integración con mapas reales es uno de sus aspectos más
destacados. Se actualiza continuamente, siendo su última versión de abril de 2019.
Posteriormente se explicará con más detalle este simulador.
23

5.2 SIMULADORES DE REDES DE COMUNICACIONES
Los simuladores de redes de comunicaciones suelen ser programas complejos en
los que se van definiendo distintos elementos desde la capa de aplicación hasta la física. La
mayoría de ellos hacen ciertas abstracciones para mejorar el rendimiento de los mismos.
Todos en mayor medida simulan distintos protocolos como FTP o HTTP y utilizan
protocolos de encaminamiento válidos para redes móviles inalámbricas como AODV o
OLSR.
5.2.1 Global Mobile Information System Simulator (GLOMOSIM)
GLOMOSIM fue desarrollado en la Universidad de California, Los Ángeles, a
mitad de los años 90 del pasado siglo [10]. Estaba diseñado para comunicaciones militares
inalámbricas, satelitales e incluso entre aeronaves. Utilizaba distintas capas MAC
(802.11.b, CSMA, …) y era capaz de simular conexiones TCP y UDP. Era capaz de
simular desde pocos nodos hasta miles de ellos. Lamentablemente, la universidad dejó de
mantenerlo.
5.2.2 Optimized Network Engineering Tools (OPNET)
OPNET desarrollado en torno al año 2000 por dos egresados del Massachusetts
Institute of Technology que crearon una empresa para comercializar un software de
simulación de redes de paquetes que permitía una licencia de uso educativo o de
investigación [11]. Aún hoy la empresa que compró los derechos comercializa software
orientado a WIFI, SDN, optimización de redes WAN, gestión de redes, etc
5.2.3 Java in Simulation Time (JiST) / Scalable Wireless Ad hoc Network Simulator (SWANS)
JiST es un entorno de simulación de eventos discretos realizado en JAVA, con esta
base SWANS se utiliza como herramienta de simulación de redes inalámbricas Ad hoc, el
desarrollo de esta herramienta se terminó en 2005 [12]. Los autores indicaban que
mejoraban en prestaciones a otros simuladores de la época.
24

5.2.4 Georgia Tech Network Simulator (GTNetS)
GTNets se desarrolló hasta el año 2008 [13]. Los desarrolladores querían simular
redes de tamaño medio y de gran escala. Se pueden simular protocolos muy conocidos en
redes ad hoc como AODV o DSR junto a protocolos clásicos de encaminamiento como
BGP u OSPF.
5.2.5 OMNET++
Uno de los simuladores más utilizados hoy en día para el estudio de redes de
telecomunicaciones complejas, redes de sensores, arquitecturas hardware, teoría de colas,
etc [14]. La última versión apareció en Mayo de 2019. Utiliza un lenguaje de alto nivel
para generar las topologías y configuraciones, que se une a la potencia de C++ en la que
están escritos los componentes y módulos.
5.2.6 Network Simulator versión 2 (NS2)
Quizás la herramienta de simulación más utilizada en el ámbito docente y de
investigación [15]. Heredero de un simulador previo en torno a 1989. Esta aplicación fue
mantenida y desarrollada por distintas empresas y organismos, entre los que destaca la
agencia DARPA desde 1995. Finalizando en la versión 35 en el año 2011. Entre otros
trabajos desarrollados en esta herramienta, cabe mencionar el estudio de balance de carga
en redes ad hoc [16, 17] o el uso de inteligencia artificial para mejorar las conexiones a
Internet en redes híbridas [18].
5.2.7 Network Simulator versión 3
NS3 heredero de NS2 [19] es u simulador de eventos discretos para usar en redes
con alguna conexión a Internet. Tiene licencia pública GNU GPLv2 y es de uso público,
utilizado en educación superior e investigación. Esta herramienta comenzó su andadura en
2008 y se actualiza al menos una vez al año. Incluye el uso de distintos protocolos muy
conocidos junto con la posibilidad de crear nuevas variantes de las mismas para poder
compararlas con las originales en ambientes similares. Posteriormente se explicará con más
detalle esta herramienta.
25

5.2.8 MATLAB
El uso de la herramienta matemática en la ingeniería por excelencia, MATLAB,
también se utiliza en la simulación de redes. En este caso, las simulaciones que se realizan
son limitadas, MATLAB no es un lenguaje apropiado para modelar las complejas
situaciones que se dan en las redes de telecomunicación. El uso de esta herramienta suele
estar restringido a ciertos elementos de la capa de protocolos, algunos usos de MATLAB
se pueden observar en [20] y [21].
6 ESTUDIO DE MODELOS DE MOVILIDAD
Uno de los aspectos más cruciales e importantes a la hora de simular protocolos de
encaminamiento en redes vehiculares es la correcta elección del patrón de movilidad que
siguen los vehículos. Los modelos de movilidad deben incluir distintos elementos como el
número de carriles en autovías y calles, las señales de velocidad máxima en carreteras o los
intervalos de apertura y cierre de los semáforos, por poner unos pocos ejemplos que
ayudan a ver la complejidad que tienen estos modelos de movilidad. Los modelos de
movilidad se suelen dividir en dos grandes bloques:
Modelos de movilidad sintéticos. Aquellos que están basados en propiedades
estadísticas y que generan las muestras a partir de estas propiedades.
Modelos de movilidad realistas. Aquellos que están basados en la obtención de
trazas reales y que luego se usan en las simulaciones.
6.1 MODELOS DE MOVILIDAD SINTÉTICOS
Los modelos de movilidad que se empezaron a usar en redes vehiculares provenían
de los modelos que se habían creado para las redes MANET. En este tipo de redes, uno de
los modelos iniciales era el Random Waypoint Model que aún es utilizado a pesar de sus
peculiaridades estadísticas (los nodos se concentran en el centro con el paso del tiempo
[22]. Algunos modelos se detallan a continuación:
26

Random Direction Mobility Model [23]. El nodo elige aleatoriamente una dirección
determinada y una velocidad determinada. Cuando el nodo llega a la frontera del
escenario se detiene durante un tiempo y vuelve a elegir trayectoria y velocidad.
Manhattan mobility model [24]. Se definen calles paralelas y perpendiculares que
tienen intersecciones. En las intersecciones los nodos pueden girar a la derecha o
izquierda o seguir de frente. Las calles tienen velocidades límite y los nodos tienen
dependencia de velocidad entre ellos.
City Section Mobility Model [25]. Aquí también se definen calles con velocidad
limitada, estructuras de interés como semáforos y otros elementos. Los vehículos
siguen unas rutas preestablecidas.
Obstacle Mobility Mode [26]. Para añadir realidad al modelo se añaden edificios y
otros obstáculos que pueden cambiar tanto el movimiento de los nodos como la
recepción de la señal inalámbrica.
Realistic mobility model based on Bezier curves [27]. Modelo reciente en el que
existen obstáculos irregulares y se definen trayectorias en función de las famosas
curvas de Bezier.
Reference Point Group Mobility [28]. En este caso los nodos se dividen en grupos
que se dirigen a puntos especiales. Los nodos dentro del grupo definen su posición,
destino, velocidad, etc a partir de una trayectoria hacia ese punto especial.
Existen muchos otros modelos como se puede comprobar al hacer una búsqueda en
la literatura científica, por ejemplo, en [29] aparecen en torno a 15 modelos de movilidad
distintos.
6.2 MODELOS DE MOVILIDAD BASADOS EN MUESTRAS REALES
La movilidad de los vehículos puede obtenerse a partir de datos obtenidos de muy
diferente forma, desde trazas de la posición de autobuses urbanos, trazas de taxis en
grandes urbes u otros estadísticos que pueden llevar a generar el emplazamiento de los
nodos para las simulaciones. Se detallan algunos de los modelos:
27

VehILux [30]. Este modelo de movilidad se basa en dos aspectos: el mapa real de una
determinada zona, en este caso Luxemburgo, y los datos obtenidos del servicio de
tráfico de dicho país. Al igual que sucede en España, el Ministerio de Transporte de
Luxemburgo tiene una serie de puntos de captura que mide el número de vehículos que
pasan por ellos. Los autores construyen su modelo a partir de estos elementos y los
integran en SUMO.
Mobility dataset of social vehicles traveling [31]. En este caso se generan los
movimientos a partir de las muestras obtenidas con 12000 taxis de la ciudad de Pekín.
Se divide la ciudad en distintas áreas y en función de la hora del día se va generando el
tráfico en cada zona.
En este artículo [32] se hace uso de los datos proporcionados por la Dirección General
de Tráfico de las autovías A6 y M40 a su paso por Madrid. Los autores analizan las
medidas y las emplean para generar un modelo sintético realista de la autovía. Con este
modelo consiguen medir parámetros como el tiempo de conectividad entre los
vehículos.
Medidas continuas del tráfico en las autopistas y calles cercanas a la Universidad de
Karlsruhe [33] permitieron crear un simulador que aún sigue siendo explotado
comercialmente.
7 DESCRIPCIÓN
7.1 BREVE DESCRIPCIÓN DEL SIMULADOR NS-3
7.1.1 INTRODUCCIÓN AL SIMULADOR NS-3
El simulador ns-3 es un simulador de red de eventos discretos destinado
principalmente a la investigación y el uso educativo. El proyecto ns-3, iniciado en 2006, es
un proyecto de código abierto que desarrolla el simulador ns-3 [34].
ns-3 está construido usando C++ y Python con capacidad de scripting. Python
envuelve la biblioteca ns gracias a la biblioteca pybindgen que delega el análisis de los
28

encabezados ns C++ a castxml y pygccxml para generar automáticamente el pegamento de
enlace C++ correspondiente. Estos archivos C++ generados automáticamente se compilan
finalmente en el módulo ns Python para permitir a los usuarios interactuar con los modelos
C++ ns y el núcleo a través de scripts Python. El simulador ns presenta un sistema
integrado basado en atributos para administrar los valores predeterminados y por instancia
para los parámetros de simulación [35].
A reseñar un punto clave del simulador y es que ns-3 no es una extensión
compatible con versiones anteriores de ns-2; es un nuevo simulador. Los dos simuladores
están escritos en C++ pero ns-3 es un nuevo simulador que no es compatible con la API de
ns-2.
A continuación se presentan algunas características distintivas de ns-3 en contraste
con otras herramientas [34]:
• ns-3 está diseñado como un conjunto de bibliotecas que se pueden combinar
entre sí y también con otras bibliotecas de software externas. Si bien algunas
plataformas de simulación proporcionan a los usuarios un entorno de interfaz
gráfica de usuario único e integrado en el que se llevan a cabo todas las tareas,
ns-3 es más modular en a este respecto. Varios animadores externos y
herramientas de análisis y visualización de datos se pueden utilizar con ns-3.
Sin embargo, los usuarios deben esperar trabajar en la línea de comandos y con
las herramientas de desarrollo de software C++ y/o Python.
• ns-3 se usa principalmente en sistemas Linux o macOS, aunque existe soporte
para sistemas BSD y también para entornos de Windows que pueden construir
código Linux, como Windows Subsystem para Linux o Cygwin. Los usuarios
de Windows también pueden usar una máquina virtual Linux.
• ns-3 no es un producto de software en propiedad de ninguna compañía. El
soporte para ns-3 se realiza con el mejor esfuerzo en el foro ns-3-users (ns-3-
29

7.1.2 ENTORNO DE DESARROLLO
En Linux, el sistema ns-3 utiliza varios componentes de la "cadena de
herramientas" de GNU para el desarrollo. Una cadena de herramientas de software es el
conjunto de herramientas de programación disponibles en el entorno dado. Para una
revisión rápida de lo que se incluye en la cadena de herramientas GNU, hay que consultar
http://en.wikipedia.org/wiki/GNU_toolchain. ns-3 usa gcc, GNU binutils y gdb. Sin
embargo, no se utiliza las herramientas del sistema de compilación GNU, ni make ni
autotools. Se utiliza Waf para estas funciones [34].
El sistema de compilación Waf se utiliza en el proyecto ns-3. Es uno de la nueva
generación de sistemas de compilación basados en Python.
En macOS, la cadena de herramientas utilizada es Xcode. Se recomienda
encarecidamente a los usuarios de ns-3 en un Mac que instalen Xcode y los paquetes de
herramientas de línea de comandos desde la tienda de aplicaciones de Apple, y que
consulten el wiki de instalación de ns-3 para obtener más información
(https://www.nsnam.org/wiki /Instalación).
En Windows, existen entornos que simulan el entorno Linux en varios grados. El
proyecto ns-3 en el pasado (pero no actualmente) ha apoyado el desarrollo en el entorno
Cygwin para estos usuarios. Para más información, hay que consultar
http://www.cygwin.com/ para obtener más detalles sobre la descarga y visitar la wiki de
ns-3 para obtener más información sobre Cygwin y ns-3. MinGW actualmente no es
oficialmente compatible. Otra alternativa a Cygwin es instalar un entorno para recreación
de máquinas virtuales (VMWare, VirtualBox, etc.) para, posteriormente, instalar una
máquina virtual GNU/Linux.
7.1.3 ELEMENTOS CLAVE EN NS-3
NODO
En ns-3 se utiliza un término más genérico utilizado por otros simuladores de red y
que proviene de la Teoría de Grafos: nodo.
30

En ns-3, la abstracción del dispositivo informático básico se denomina nodo. Esta
abstracción está representada en C ++ por el clase Node. La clase clase Node proporciona
métodos para gestionar las representaciones de dispositivos informáticos en simulaciones.
APLICACIÓN
En ns-3 la abstracción básica para un programa de usuario que genera alguna
actividad para simular es la aplicación. Esta abstracción está representada en C ++ por la
clase Application.
CANAL
En el mundo simulado de ns-3, uno conecta un nodo a un objeto que representa un
canal de comunicación.
La clase Channel proporciona métodos para administrar objetos de subred de
comunicación y conectar nodos a los mismos. Los canales también pueden estar
especializados: desde un espacio tridimensional para una red inalámbrica hasta un
conmutador Ethernet.
DISPOSITIVO DE RED
En ns-3, la abstracción del dispositivo de red (NetDevice) cubre tanto el controlador
de software como el hardware simulado. Un dispositivo de red está "instalado" en un Node
para permitir que el Node se comunique con otros Nodes en la simulación a través de
Channels. Al igual que en una computadora real, un Node puede conectarse a más de un
Channel a través de múltiples NetDevices.
La abstracción del dispositivo de red está representada en C++ por la clase
NetDevice. La clase NetDevice proporciona métodos para administrar conexiones a objetos
Node y Channel.
31

ASISTENTES DE TOPOLOGÍA
Son objetos que facilitan las operaciones requeridas para crear NetDevices,
asignarle una dirección MAC, instalar dicho dispositivo de red a un Node, configurar la
pila de protocolo del nodo y después conectar el NetDevice a un Channel.
Nivel Clases de ns-3 (ejemplos)
AplicaciónUdpEchoClientHelper
Transporte
Red Ipv4AddressHelpel`
EnlacePointToPointHelper
Físico
Tabla 3. Ejemplo de modelo ns-3 [36]
LA CLASE FLOWMONITOR
En todos los estudios de redes de comunicaciones es fundamental calcular las
prestaciones de cada protocolo mediante una serie de métricas que están muy bien
definidas. ns-3 permite el cálculo de estas métricas de una forma sencilla mediante la clase
FlowMonitor [37]. Entre otras variables, se pueden obtener las siguientes:
• Retardo (retardo medio extremo a extremo).
• Rendimiento.
• Relación de pérdida de paquetes.
• Media del Jitter o fluctuación en el procesamiento de los paquetes.
• Media del tamaño del paquete transmitido (bytes).
• Media del tamaño del paquete recibido (bytes).
• Media de la velocidad de transmisión (bit/s).
• Media de la velocidad de recepción (bit/s).
• Media de los saltos de los paquetes.
• Paquetes perdidos.
32

Se podrá instalar en todos los nodos de la red o en ciertos nodos de manera
separada. Una vez realizada la ejecución de la simulación, se crea un archivo en formato
XML con los datos, donde dicho fichero estará ubicado en el directorio ns-3. La
visualización de los datos se podrá realizar a través de cualquier visor XML, por ejemplo
con Netanim [38].
7.2 EL PROTOCOLO WAVE Y EL ESTÁNDAR 802.11p. JUSTIFICACIÓN PARA SU USO EN VANET.
7.2.1 INTRODUCCÓN A LOS ESTÁNDARES WAVE Y 802.11p
El nuevo estándar IEEE 802.11p (que deriva del IEEE 802.11) define la utilización
de las capas más bajas (física y lMAC) de la pila de protocolos WAVE (Wireless Access in
Vehicular Enviroments), que a su vez es el estándar de un conjunto de protocolos de
acceso inalámbrico en entornos vehiculares llevada a cabo específicamente por un grupo
del IEEE [39], define la arquitectura, el modelo de comunicaciones, la estructura de
gestión, los mecanismos de seguridad y el acceso físico para comunicaciones inalámbricas
en el entorno vehicular de alta velocidad y baja latencia (hasta 27 Mb/s) y de corto alcance
(hasta 1000 m). Los componentes arquitectónicos principales definidos por estos
estándares son la Unidad a bordo (OBU – On-Board Unit), la Unidad de carretera (RSU –
Roadside Unit) y la interfaz WAVE.
Define las mejoras con respecto al estándar 802.11 (la base de los productos
comercializados como Wi-Fi) necesarios para admitir aplicaciones de Sistemas de
Transporte Inteligente (ITS). Esto incluye el intercambio de datos entre vehículos de alta
velocidad y entre los vehículos y la infraestructura de carretera, llamada comunicación
V2X, en la banda ITS con licencia de 5.9 GHz. En la Fig. 7 se muestra la pila de
protocolos WAVE y donde se encuentra el protocolo 802.11p.
La familia de estándares IEEE 1609 define las capas superiores [40] mientras que el
estándar IEEE 802.11p (derivado del 802.11) especifica, como antes se mencionó, las
33

capas inferiores (capa física y MAC). A continuación se presenta el conjunto de estándares
de los que se compone el IEEE 1609:
• IEEE 1609.0 2019 - Guía IEEE para el acceso inalámbrico en entornos de
vehículos (WAVE) - Arquitectura [41]. La arquitectura y los servicios de
acceso inalámbrico en entornos vehiculares (WAVE) necesarios para que los
dispositivos WAVE se comuniquen en un entorno vehicular móvil se describen
en esta guía.
• IEEE 1609.1 2006 - Estándar de uso de prueba para acceso inalámbrico en
entornos vehiculares (WAVE) - Administrador de recursos (Descartado)
[42]. Este estándar especifica un acceso inalámbrico en aplicaciones de
Comunicaciones Dedicadas de Corto Alcance (DSRC - Dedicated Short-Range
Communications) de entornos vehiculares (WAVE), conocido como Gestor de
Recursos (RM – Resource Manager), diseñado para permitir que las
aplicaciones en sitios remotos se comuniquen con dispositivos conocidos como
unidades a bordo (OBU) , que se montan en vehículos, a través de dispositivos
conocidos como unidades de carretera (RSU), que se montan en la carretera.
• IEEE 1609.2 2016 - Estándar IEEE para acceso inalámbrico en entornos
vehiculares - Servicios de seguridad para aplicaciones y mensajes de
administración [43]. Este estándar define los formatos y el procesamiento de
34
Figura 7. Pila de protocolos WAVE y 802.11p

mensajes seguros para uso de los dispositivos de acceso inalámbrico en
entornos vehiculares (WAVE), incluidos los métodos para proteger los
mensajes de administración WAVE y los métodos para proteger los mensajes
de la aplicación. También describe las funciones administrativas necesarias para
soportar las funciones centrales de seguridad.
• IEEE 1609.3 2016 - Estándar IEEE para acceso inalámbrico en entornos
vehiculares (WAVE) - Servicios de red [44]. Los servicios para dispositivos y
sistemas WAVE se dan en el estándar IEEE 1609.3 (TM), estándar IEEE para
acceso inalámbrico en entornos vehiculares (WAVE) - Servicios de Red. La
capa 3 y la capa 4 del modelo de interconexión de sistema abierto (OSI) y los
elementos del Protocolo de Internet (IP), Protocolo de datagramas de usuario
(UDP) y Protocolo de control de transmisión (TCP) del modelo de Internet
están representados. Se proporcionan servicios de administración y datos dentro
de los dispositivos WAVE.
• IEEE 1609.4 2016 - Estándar IEEE para acceso inalámbrico en entornos
vehiculares (WAVE) - Operación Multicanal [45]. Están definidas las
operaciones de radio inalámbricas multicanal, modo de acceso inalámbrico en
entornos vehiculares (WAVE), control de acceso medio (MAC) y capas físicas
(PHY), incluidos los parámetros de acceso prioritario, conmutación y
enrutamiento de canales, servicios de gestión y primitivas diseñadas para
operaciones multicanal.
• IEEE 1609.5 [40]. En desarrollo. Se encargará de elaborar los requisitos de
gestión de red.
• IEEE 1609.6 [40]. En desarrollo. Se encargará de los servicios de gestión
remota.
• IEEE 1609.11 2010 - Estándar IEEE para acceso inalámbrico en entornos
vehiculares (WAVE) - Protocolo de intercambio electrónico de datos de
pago inalámbrico para sistemas inteligentes de transporte (ITS) [46]. Este
estándar especifica la capa y el perfil del servicio de pago electrónico para la
autenticación de pago e identidad, y la transferencia de datos de pago para
aplicaciones basadas en la comunicación dedicada de corto alcance (DSRC) en
acceso inalámbrico en entornos de vehículos. Este estándar define un nivel
35

básico de interoperabilidad técnica (vehículo a carretera) para equipos de pago
electrónico, es decir, unidad a bordo (OBU) y unidad de carretera (RSU)
usando WAVE. No proporciona una solución completa para la
interoperabilidad, y no define otras partes del sistema de pago electrónico, otros
servicios, otras tecnologías y elementos no técnicos de interoperabilidad de
pagos. Este estándar no tiene la intención de definir tecnología y procesos para
activar y almacenar datos en la OBU (personalización), ni las aplicaciones que
usan el servicio de pago.
• IEEE 1609.12 2016 - Estándar IEEE para acceso inalámbrico en entornos
vehiculares (WAVE) - Asignaciones de identificadores [47]. El acceso
inalámbrico en entornos vehiculares (WAVE) se especifica en la familia de
estándares IEEE 1609, dentro de la cual se utilizan varios identificadores. Se
describe el uso de estos identificadores, se indican los valores de los
identificadores que han sido asignados para su uso por los sistemas WAVE, y
se define la asociación de los valores de los identificadores especificados en los
estándares WAVE.
Las modificaciones más relevantes en 802.11p con respecto al 802.11 son: a la hora
de establecer la comunicación se reduce la carga, se debe al tiempo escaso de contacto
entre los dispositivos. Hay un nuevo tipo de BSS (Basic Service Set) denominado WBSS
(Wave Basic Service Set). Éste tiene un identificador fijo y transmite tramas baliza bajo
demanda. Las tramas baliza poseen la información importante para establecer las
comunicaciones, con lo que el proceso de autenticación ya no existe. Aparte, se prefijan las
funciones de los diferentes canales para esquivar la búsqueda de los mismos para
seleccionar la red de interés. La capa física reutiliza la especificación 802.11a y hace uso
de las técnicas de transmisión OFDM (Orthogonal Frequency-Division Multiplexing). Se
estrecha el ancho de banda desde los 20 MHz hasta los 10 MHz, consiguiendo decrementar
el retraso de difusión. El espectro de frecuencia reservado para 802.11p se compone en 7
canales.
36

7.2.2 JUSTIFICACIÓN SOBRE SU USO EN VANET
La comunicación V2x (término que engloba tanto las de origen vehículo a vehículo
o V2V – Vehicle to Vehicle y las que se establecen entre vehículo e infraestructura o V2I –
Vehicle to Infraestructure), que involucra el intercambio de datos entre los vehículos y la
infraestructura, ha demostrado mejorar la seguridad del tráfico y aumentar la eficiencia de
los sistemas de transporte. La comunicación directa de corto alcance (DSRC), que se basa
en IEEE 802.11p, ha sido objeto de una amplia estandarización, desarrollo de productos y
pruebas de campo por parte de todas las partes interesadas, lo que demuestra su beneficio
para V2X. A diferencia de las tecnologías celulares, DSRC está listo para la
implementación de V2X hoy, y aborda los casos de uso de V2x más desafiantes [48].
La idea de que los vehículos compartan información y trabajen juntos para hacer
que el transporte sea más seguro, ecológico y agradable, es realmente convincente. Las
tecnologías asociadas con este concepto, conocidas colectivamente como Sistemas
Cooperativos de Transporte Inteligente (C-ITS), prometen reducir la congestión del tráfico,
disminuir el impacto ambiental del transporte y reducir significativamente la cantidad de
accidentes de tráfico letales [48].
El estándar de facto para V2X es la tecnología inalámbrica de comunicación de
corto alcance directo (DSRC), que se basa en el estándar IEEE 802.11p, el protocolo 1609
(WAVE) en los EE. UU., y el Instituto Europeo de Normas de Telecomunicaciones (ETSI)
TC-ITS normas europeas. El estándar fue aprobado en 2009, y desde entonces, ha habido
una serie de ensayos de campo. IEEE 802.11p está listo para la implementación y está
ganando impulso, en contrapartida a la próxima generación de comunicación inalámbrica
móvil 5G. Además, durante los más de 10 años anteriores se han realizado multitud de
pruebas de campo, reflejándose las inversiones en ese período para validar la tecnología
802.11p [48].
La tecnología celular es utilizada por millones de personas en todo el mundo.
Debido a que la infraestructura celular es extensa, toma tiempo actualizarse. En total, la
versión 8 del estándar 3GPP o denominada 4G o LTE, tardó aproximadamente seis años en
obtener una implementación a gran escala. Actualmente, las redes celulares para soportar
37

V2X sólo pueden abordar casos de uso básicos de V2X, pero carecen de soporte para casos
de uso de baja latencia y alta movilidad, aunque las redes venideras 5G solucionan estos
escenarios, todavía queda lejos de su implementación a gran escala y de que se trata de una
tecnología no lo suficientemente madura. Estos son los elementos más estrechamente
asociados con los casos de uso relacionados con la seguridad [48].
Para cuando la comunidad celular pueda abordar todos los casos de uso de V2X, es
probable que otras tecnologías, incluida 802.11p, ya se hayan implementado. Esto
convertirá al celular en un nuevo competidor en un campo que ya tiene jugadores
establecidos [48].
La seguridad es otro aspecto que debe considerarse. Los sistemas celulares actuales
usan la tarjeta del Módulo de identidad del suscriptor (SIM) en el teléfono para la
autenticación de la red. La red reconoce la tarjeta SIM y, en base a este reconocimiento,
proporciona una conexión segura. Las SIM pueden funcionar para la comunicación V2X
asistida por la red, pero en ausencia de una red, debe existir algún otro tipo de mecanismo
de seguridad. 802.11p define este tipo de mecanismo de seguridad, y el 3GPP bien puede
adoptar un enfoque similar, pero aún no ha abordado formalmente el problema [48].
Y la cuestión de la privacidad es algo a tener muy en cuenta. Con una solución
basada en IEEE 802.11p, los datos no tienen porque pasar por sistemas intermedios como,
por ejemplo, soluciones basadas en la nube.
Por tanto, en la Unión Europea el 802.11p es el estándar para la comunicación
vehicular y se está llevando a cabo desde el Instituto de Estándares de Telecomunicación
Europeo (ETSI – European Telecommunications Standards Institute) a través del grupo
ITS-G5.
38

7.3 BREVE DESCRIPCIÓN DE LOS PROTOCOLOS A COMPARAR
En la sección 4 se ha podido comprobar que el número de protocolos que los
investigadores han desarrollado para las redes VANET es casi ilimitado, aun así, siguen
existiendo dos protocolos en este tipo de redes que son muy utilizados por su
normalización por el IETF: Ad hoc On-Demand Distance Vector (AODV) y OLSR.
Además, se va a usar otro protocolo experimental propuesto en [49] para poder comparar
las tres métricas más usadas: retardo, pérdidas y sobrecarga normalizada.
Una breve nota sobre los algoritmos:
• AODV es un protocolo estandarizado en la RFC 3561 [50], además cuenta con
una segunda versión aún en modo borrador [51] y otra versión para redes
asimétricas de bajo potencia y alto ruido [52].
• OLSR cuenta también con dos versiones: RFC 3626 [53] y RFC 7181 [54].
• La propuesta se basará en una modificación del protocolo AODV y éste se
compará con los dos anteriores.
7.3.1 PROTOCOLO VECTOR DE DISTANCIA BAJO DE MANDA AD HOC (AODV – AD HOC ON-DEMAND DISTANCE VECTOR)
El algoritmo AODV (Ad hoc On-Demand Distance Vector) El algoritmo Ad hoc
On-Demand Distance Vector (AODV) permite un enrutamiento dinámico, autoejecutable y
multisalto entre nodos móviles participantes que desean establecer y mantener una red ad
hoc. Los nodos móviles obtienen rutas rápidamente para nuevos destinos, y para los que no
están en comunicación activa no las mantiene. Los nodos responden ante roturas de enlace
y a cambios continuos en la topología de la red. El algoritmo asegura la eliminación de
bucles (Bellman-Ford) ofreciendo una rápida convergencia [50].
A destacar en AODV es la utilización de un número de secuencia de destino para
cada ruta presente en la tabla de rutas. El destino crea el número de secuencia de destino
junto con cualquier información de ruta que envíe a los nodos solicitantes. El uso de
39

números de secuencia de destino garantiza la libertad del bucle y es sencillo de programar.
Ya que se puede dar la situación de la elección de dos rutas a un destino, se seleccionará el
nodo solicitante que tenga el mayor número de secuencia.
El formato de mensajes utilizado se transmiten vía UDP: RREQ o Petición de Ruta,
RREP o Respuesta de Ruta y RERR o Errores de Ruta (RERR). Si los puntos finales en la
comunicación tienen rutas válidas, AODV no entra en acción. Si se quiere establecer una
nueva ruta, se envía un mensaje RREQ para buscar una ruta al destino. Se puede
determinar una ruta cuando el RREQ llega al destino mismo o a un nodo intermedio con
una ruta 'suficientemente fresca' hacia el destino. Una ruta 'suficientemente nueva' es una
entrada de ruta válida para el destino cuyo número de secuencia asociado es al menos tan
grande como el contenido en el RREQ. La ruta se pone a disposición mediante la
unidifusión de un RREP al origen del RREQ. Cada nodo que recibe la solicitud almacena
en caché una ruta de regreso al creador de la solicitud, de modo que el RREP puede ser
unidifusión desde el destino a lo largo de una ruta hacia ese originador, o de cualquier
nodo intermedio que pueda satisfacer la solicitud. La Fig. 8 ilustra el camino seguido por
los mensajes RREQ y RREP.
Cuando se detecta un enlace roto en una ruta activa, se una un mensaje RERR para
notificar que se ha perdido dicho enlace a otros nodos. Para ello, cada nodo mantiene una
lista de nodos “precursores” que se adquieren fácilmente durante el procesamiento para la
generación de un mensaje RREP.
40
Figura 8. Protocolo de enrutamiento AODV: a) propagación del mensaje RREQ y b) Ruta seguida por el mensaje RREP a la fuente [1]

AODV es un protocolo de enrutamiento y se ocupa de la gestión de la tabla de
rutas. La información de la tabla de ruta debe mantenerse incluso para rutas de corta
duración, como las que se crean para almacenar temporalmente rutas inversas hacia nodos
que originan RREQ. AODV utiliza los los campos que se definen más abajo, con cada
entrada de la tabla de ruta [50]:
• Dirección del protocolo IP de destino.
• Número de secuencia de destino.
• Testigo que indica la validez del número de secuencia
• Otros testigos de estado y enrutamiento (por ejemplo, válido, inválido,
reparable, siendo reparado)
• Interfaz de red.
• Conteo de saltos.
• Salto necesario siguiente.
• Precursores presentes en un lista.
• Vida útil (tiempo de vencimiento o eliminación de la ruta).
Con respecto a la versión 2 del protocolo [51]: se mejora substancialmente la
verificación del enlace bidireccional, alterna métricas para determinar la calidad de la ruta,
mejora el soporte para múltiples interfaces, se añade soporte para direcciones IP multi-
interfaz, se añade un modelo de seguridad que permite a los nodos finales revisar la
integridad de la comunicación, los mensajes HELLO y LOCAL REPAIR se eliminan, se
añade la capacidad de multiconexión a varias redes y se actualiza el formato de mensajes.
Hay otra versión 3 del protocolo AODV [52], capaz de establecer rutas asimétricas
donde no satisfacen los requerimientos de las aplicaciones utilizadas.
7.3.2 PROTOCOLO DE ENRUTAMIENTO DE ESTADO DEL ENLACE OPTIMIZADO (OLSR – OPTIMIZED LINK STATE ROUTING)
El Protocolo de enrutamiento de estado de enlace optimizado (OLSR) está
desarrollado para redes ad hoc móviles. Funciona como un protocolo proactivo impulsado
41

por tablas, es decir, intercambia información de topología con otros nodos de la red
regularmente. El protocolo conserva las propiedades de la estabilidad de un algoritmo de
estado de enlace y juega a su favor el tener rutas disponibles de inmediato debido a su
origen proactivo. OLSR optimiza el protocolo de estado de enlace clásico, destinado en
este caso para redes ad hoc móviles [53].
OLSR se diseñó para funcionar distribuidamente. El protocolo no necesita de una
transmisión confiable de mensajes de control: los mensajes de control son enviados por
cada nodo periódicamente y, por tanto, puede dar una situación de una pérdida aceptable
de algunos de estos mensajes. Dichas pérdidas ocurren con frecuencia en las redes de radio
debido a problemas de transmisión y por la contingencia de los nodos al utilizar el mismo
medio [53].
Cada nodo selecciona un conjunto de sus nodos vecinos como "relés multipunto"
(MPR). En OLSR, solo los nodos, seleccionados como tales MPR, son responsables de
reenviar el tráfico de control, destinado a la difusión en toda la red. Los MPR proporcionan
un mecanismo eficiente para controlar el tráfico de inundaciones al reducir la cantidad de
transmisiones requeridas [53].
Los MPRs tienen una responsabilidad en tanto a la hora de declarar la información
del estado del enlace en la red. De hecho, el único requisito para que OLSR proporcione
rutas de ruta más cortas a todos los destinos es que los nodos MPR declaren información
de estado de enlace para sus selectores MPR. Se puede utilizar información adicional
disponible sobre el estado del enlace, por ejemplo, para redundancia [53].
Los nodos que han sido seleccionados como relés multipunto por algunos nodos
vecinos anuncian esta información periódicamente en sus mensajes de control. De este
modo, un nodo anuncia a la red que tiene acceso a los nodos que lo han seleccionado como
MPR. En el cálculo de la ruta, los MPR se utilizan para formar la ruta desde un nodo dado
a cualquier destino en la red. Además, el protocolo utiliza los MPR para facilitar la
inundación eficiente de mensajes de control en la red [53].
42

Un nodo selecciona MPR entre sus vecinos de un salto con enlaces "simétricos", es
decir, bidireccionales. Por lo tanto, seleccionar la ruta a través de MPR evita
automáticamente los problemas asociados con la transferencia de paquetes de datos a
través de enlaces unidireccionales [53].
El protocolo es particularmente adecuado en grandes redes y con muchos nodos, ya
que la optimización realizada con MPR desempeña su funcionamiento muy bien en este
contexto. Cuanto más grande y más densa es una red, se puede lograr una mayor
optimización en comparación con el clásico algoritmo de estado de enlace.
El Protocolo de enrutamiento de estado de enlace optimizado versión 2 (OLSRv2)
es el sucesor de OLSRv1. OLSRv2 conserva los mismos mecanismos y algoritmos básicos,
mejorados por la capacidad de utilizar una métrica de enlace que no sea el conteo de saltos
en la selección de rutas más cortas. OLSRv2 también utiliza un marco de señalización más
flexible y eficiente e incluye cierta simplificación de los mensajes que se intercambian
[54].
7.3.3 PROPUESTA: Un protocolo basado en AODV que usa control difuso para mejorar éste.
El algoritmo usado para las comparaciones es una versión del protocolo Portable
Fuzzy constraint Q-learning AODV (PFQ-AODV) [49]. Este protocolo modifica el clásico
AODV introduciendo un sistema difuso que sirve para determinar si un enlace es bueno o
no. Además, también utiliza un sistema de aprendizaje (Q-learning) para determinar la
posición relativa de los vehículos a partir de los mensajes HELLO y RREQ, de esta forma
elige a qué nodo móvil se conecta. El protocolo que se propone utilizar eliminar la
necesidad del algoritmo de aprendizaje, será el sistema difuso el que determine a qué nodo
se debe conectar el vehículo modificando la tabla de encaminamiento.
Las variables del sistema difuso serán las mismas que las usadas por los autores de
PFQ-AODV pero su cálculo se realiza de forma distinta y de una forma más sencilla. Las
variables son las siguientes:
43

• Ancho de banda usado (ABU). El vehículo determina el ancho de banda usado
analizando el número de paquetes enviados y/o recibidos en un intervalo de
tiempo. Cada vez que llega un mensaje RREQ se mide esta variable y se
inicializan los valores de los paquetes recibidos y enviados.
• Movilidad del nodo (MOV). Esta variable nos indica la movilidad relativa del
nodo respecto a sus vecinos. Si este valor es alto, el vehículo tiene una alta
movilidad y la conectividad será más complicada. En caso contrario, si el valor
es bajo la conectividad será elevada. La medida de esta variable se realiza a
partir de los mensajes HELLO recibidos por el vehículo de forma similar al
dado en [56].
• Calidad del enlace (CE). En este caso sí se calcula de forma similar, aunque no
exactamente igual, a la versión original. Si se reciben más de 10 mensajes
HELLO de un nodo, se calcula esta variable con la siguiente expresión: CE =
Hellos recibidos/Hellos enviados.
Los conjuntos difusos que se usan son los siguientes (Fig. 9):
Las reglas del sistema difuso también son iguales al de la propuesta original (Tabla
4):
44
Figura 9. Conjuntos difusos

Ancho de Banda Movilidad Calidad del Enlace Rango
Regla 1 Grande Lenta Buena Perfecto
Regla 2 Grande Lenta Media Bueno
Regla 3 Grande Lenta Mala No preferible
Regla 4 Grande Media Buena Bueno
Regla 5 Grande Media Media Aceptable
Regla 6 Grande Media Mala Malo
Regla 7 Grande Rápida Buena No preferible
Regla 8 Grande Rápida Media Malo
Regla 9 Grande Rápida Mala Muy Malo
Regla 10 Medio Lenta Buena Bueno
Regla 11 Medio Lenta Media Aceptable
Regla 12 Medio Lenta Mala Malo
Regla 13 Medio Media Buena Aceptable
Regla 14 Medio Media Media No preferible
Regla 15 Medio Media Mala Malo
Regla 16 Medio Rápida Buena Malo
Regla 17 Medio Rápida Media Malo
Regla 18 Medio Rápida Mala Muy Malo
Regla 19 Pequeño Lenta Buena No preferible
Regla 20 Pequeño Lenta Media Malo
Regla 21 Pequeño Lenta Mala Muy Malo
Regla 22 Pequeño Media Buena Malo
Regla 23 Pequeño Media Media Malo
Regla 24 Pequeño Media Mala Muy Malo
Regla 25 Pequeño Rápida Buena Malo
Regla 26 Pequeño Rápida Media Muy Malo
Regla 27 Pequeño Rápida Mala Muy Malo
Tabla 4. Tabla con las reglas de la base de conocimiento
45

Los conjuntos difusos de la salida del sistema serían (Fig. 10):
Cada vez que un vehículo tiene que actualizar su tabla de encaminamiento calculará
el rango a partir del sistema difuso e introducirá en la tabla de encaminamiento para la
nueva ruta el valor dado al multiplicar el número de saltos por 1-rango. Con esto se logra
que las rutas más estables sean prioritarias sobre otras rutas con menor número de saltos
pero mucho menos estables. Este es el único cambio que se realiza en la tabla, el resto del
comportamiento será similar al de un protocolo de encaminamiento típico.
7.4 SIMULACIONES
Las simulaciones realizadas consisten en determinar las características básicas de
una zona determinada como son: las dimensiones, el número de vehículos, el tipo de
movilidad, el número de fuentes y receptores de tráfico, etc. Una vez determinada estas
características se obtienen 30 escenarios distintos para realizar las simulaciones de cada
uno de los protocolos analizados, obteniendo los valores medios del retardo, las pérdidas y
la sobrecarga normalizada. Evidentemente, el mejor protocolo será aquel que tenga los
valores más pequeños para las tres métricas.
46
Figura 10: Salida del sistema difuso

7.5 CARACTERÍSTICA DEL ESCENARIO
Las dimensiones de todos los escenarios serán de 2500 x 2500 m de forma similar
al artículo de referencia [49]. Las características se resumen en Tabla 5:
Parámetro Valor
Vehículos 200
Movilidad Manhattan
Patrón de tráfico 30 fuentes CBR32 Kbps
Tamaño del paquete de datos 512 bytes
MAC 802.11 (11 Mbps)
Modelo de propagación Nakagami Model
Velocidad máxima 20-60 m/s
Tiempo de simulación 500 s
Tabla 5. Características de los escenarios
8 RESULTADOS
Los resultados obtenidos para las tres simulaciones se resumen en las tablas
siguientes, en las que se calculan las siguientes métricas:
- Retardo medio. Se considera la media del tiempo que se tarda en recibir un paquete
de datos desde su origen hasta su destino.
- Pérdidas. Se considera el cociente entre el número de paquetes enviados y el
número de paquetes recibidos.
- Sobrecarga normalizada. Es el cociente entre el número de paquetes de control
dividido ente el número de paquetes recibidos.
47

El retardo medio (s) en función de la velocidad se puede encontrar en la siguiente Tabla 6:
Velocidad (m/s) AODV OLSR Propuesta20 0.799 0.2998 0.632930 0.9496 0.3562 0.751540 0.9991 0.3747 0.791450 1.0991 0.4121 0.870360 1.1489 0.4310 0.9103
Tabla 6. Retardo medio.
Los valores del retardo son bastante altos debido a la velocidad de los vehículos en
el que los enlaces se construyen y destruyen a alta velocidad. OLSR es el protocolo que
presenta mejores resultados como protocolo proactivo que es, a continuación, nuestra
propuesta obtiene mejores valores que el AODV original.
Las pérdidas se encuentran en la siguiente Tabla 7:
Velocidad (m/s) AODV OLSR Propuesta20 0.0746 0.0648 0.044830 0.0996 0.0861 0.087240 0.1490 0.1291 0.139550 0.1688 0.1671 0.168060 0.1886 0.1745 0.1796
Tabla 7. Pérdidas.
Las mejores pérdidas se obtienen con nuestra propuesta, al utilizar el sistema difuso
se eliminan rutas que tienen un alto índice de volatilidad lo que hace que se mejore
ampliamente a AODV, por otra parte. los resultados entre AODV y OLSR son
relativamente semejantes.
La sobrecarga normalizada para las distintas simulaciones se encuentra en la
siguiente Tabla 8:
Velocidad (m/s) AODV OLSR Propuesta20 0.9992 1.4986 0.899230 1.2997 19489 1.169740 1.5992 2.3997 1.438850 1.8987 2.8496 1.709660 1.9982 2.9992 1.7983
Tabla 8. Sobrecarga normalizada.
48

Como protocolo proactivo OLSR es el que obtiene peores resultados en cuanto a
sobrecarga normalizada, debido al gran número de paquetes de control que se envían.
Nuestra propuesta mejora al AODV original ya que como se ha comentado anteriormente,
rechaza rutas que cambian muy rápidamente.
9 CONCLUSIONES Y LINEAS DE FUTURO
La propuesta realizada cambia el comportamiento de AODV añadiendo un sistema
difuso que intenta mejorar la estabilidad de las rutas. Las simulaciones demuestran que el
protocolo funciona adecuadamente, sobre todo, en cuanto a pérdidas y sobrecarga
normalizada.
Se pueden incluir distintas líneas de futuro:
- Respecto al escenario, incluir algún mapa real que puede incluir información de
elementos de tráfico [55].
- Respecto a las fuentes de tráfico: se podrían incluir elementos que simularan las
comunicaciones con la infraestructura de la red o incluso con Internet, para ello
sería necesario incluir un sistema de descubrimiento de estos elementos [56].
- Respecto a las comparaciones, habría que incluir algún protocolo de otros autores y
no sólo los estandarizados por el IETF.
- Respecto al sistema difuso, incluir algunas variables nuevas o realizar un proceso
de optimización de estas variables mediante algún algoritmo genético
multiobjetivo.
49

10 REFERENCIAS BIBLIOGRÁFICAS
[1] Baraa T. Sharef, Raed A. Alsaqour, Mahamod Ismail. Vehicular communication ad
hoc routing protocols: A survey. Journal of Network and Computer
Applications 40 (2014) 363–396.
[2] Martinez, F. J., Toh, C. K., Cano, J. C., Calafate, C. T., & Manzoni, P. (2011). A
survey and comparative study of simulators for vehicular ad hoc networks
(VANETs). Wireless Communications and Mobile Computing, 11(7), 813-828.
[3] http://www.mobireal.net/ Accedido el 6 de Julio de 2019.
[4] http://veins.car2x.org/ Accedido el 7 de Julio de 2019.
[5] http://vanet.eurecom.fr/ Accedido el 4 de Julio de 2019.
[6] H. Mori, H. Kitaoka, M. Ishida and Y. Asakura, "Traffic simulator NETSTREAM
for evaluation of CO2 emissions," 13th International IEEE Conference on
Intelligent Transportation Systems, Funchal, 2010, pp. 47-53.
[7] https://lens.csie.ncku.edu.tw/index.php/research-projects/past/18-rapid-vanet
Accedido el 4 de julio de 2019
[8] [CITIMOB] Martinez, F. J., Cano, J. C., Calafate, C. T., & Manzoni, P. (2008,
May). Citymob: a mobility model pattern generator for VANETs. In ICC
Workshops-2008 IEEE International Conference on Communications Workshops
(pp. 370-374). IEEE.
[9] https://sourceforge.net/projects/sumo/ Accedido el 4 de Julio de 2019
[10] Bajaj, L., Takai, M., Ahuja, R., Tang, K., Bagrodia, R., & Gerla, M. (1999).
Glomosim: A scalable network simulation environment. UCLA computer science
department technical report, 990027 (1999), 213.
[11] Xinjie Chang, "Network simulations with OPNET," WSC'99. 1999 Winter
Simulation Conference Proceedings. 'Simulation – A Bridge to the Future' (Cat.
No.99CH37038), Phoenix, AZ, USA, 1999, pp. 307-314 vol.1.
[12] http://jist.ece.cornell.edu/ Accedido el 5 de Julio de 2019.
[13] http://griley.ece.gatech.edu/MANIACS/GTNetS/index.html Accedido el 5 de Julio
de 2019
[14] https://omnetpp.org/ Accedido el de Julio de 2019.
[15] https://www.isi.edu/nsnam/ns/ Accedido el de Julio de 2019.
50

[16] Arturo Carlos Díaz Navas. Universidad de Jaén. Proyecto Fin de Carrera:
Caracterización de Métodos de Balance de Carga en una red Ad Hoc mediante
Computación Distribuida. Septiembre de 2011.
[17] Yuste-Delgado, A. J., Cuevas-Martínez, J. C., Canada-Bago, J., Fernandez-Prieto,
J. A., & Gadeo-Martos, M. A. (2016). Improving hybrid ad hoc networks: The
election of gateways. Applied Soft Computing, 41, 1-14.
[18] Yuste, A. J., Trivino, A., & Casilari, E. (2013). Type-2 fuzzy decision support
system to optimise MANET integration into infrastructure-based wireless systems.
Expert Systems with Applications, 40(7), 2552-2567.
[19] https://www.nsnam.org/ Accedido el 6 de Julio de 2019
[20] Yuste-Delgado, A. J., Cuevas-Martinez, J. C., & Triviño-Cabrera, A. (2019).
EUDFC-Enhanced Unequal Distributed Type-2 Fuzzy Clustering Algorithm. IEEE
Sensors Journal, 19(12), 4705-4716.
[21] Cuevas-Martínez, J. C., Yuste-Delgado, A. J., & Triviño-Cabrera, A. (2017).
Cluster head enhanced election type-2 fuzzy algorithm for wireless sensor
networks. IEEE Communications Letters, 21(9), 2069-2072.
[22] Bettstetter, C., Resta, G., & Santi, P. (2003). The node distribution of the random
waypoint mobility model for wireless ad hoc networks. IEEE Transactions on
mobile computing, 2(3), 257-269.
[23] Royer, E. M., Melliar-Smith, P. M., & Moser, L. E. (2001, June). An analysis of the
optimum node density for ad hoc mobile networks. In ICC 2001. IEEE
International Conference on Communications. Conference Record (Cat. No.
01CH37240)(Vol. 3, pp. 857-861). IEEE.
[24] Bai, F., Sadagopan, N., & Helmy, A. (2003). The IMPORTANT framework for
analyzing the Impact of Mobility on Performance Of RouTing protocols for Ad hoc
NeTworks. Ad hoc networks, 1(4), 383-403.
[25] Davies, V. A. (2000). Evaluating mobility models within an ad hoc
network (Master's thesis, advisor: Tracy Camp, Dept. of Mathematical and
Computer Sciences.Colorado School of Mines).
[26] Jardosh, A., Belding-Royer, E. M., Almeroth, K. C., & Suri, S. (2003, September).
Towards realistic mobility models for mobile ad hoc networks. In Proceedings of
51

the 9th annual international conference on Mobile computing and networking (pp.
217-229). ACM.
[27] Wang, W., Wang, J., Wang, M., Wang, B., & Zhang, W. (2019). A realistic
mobility model with irregular obstacle constraints for mobile ad hoc
networks. Wireless Networks, 25(2), 487-506.
[28] Hong, X., Gerla, M., Pei, G., & Chiang, C. C. (1999, August). A group mobility
model for ad hoc wireless networks. In Proceedings of the 2nd ACM international
workshop on Modeling, analysis and simulation of wireless and mobile
systems (Vol. 53, p. 60).
[29] Harri, J., Filali, F., & Bonnet, C. (2009). Mobility models for vehicular ad hoc
networks: a survey and taxonomy. IEEE Communications Surveys &
Tutorials, 11(4), 19-41.
[30] Pigné, Y., Danoy, G., & Bouvry, P. (2011, March). A vehicular mobility model
based on real traffic counting data. In International Workshop on Communication
Technologies for Vehicles (pp. 131-142). Springer, Berlin, Heidelberg.
[31] Kong, X., Xia, F., Ning, Z., Rahim, A., Cai, Y., Gao, Z., & Ma, J. (2018). Mobility
dataset generation for vehicular social networks based on floating car data. IEEE
Transactions on Vehicular Technology, 67(5), 3874-3886.
[32] Marco Gramaglia, Oscar Trullols-Cruces, Diala Naboulsi, Marco Fiore, Maria
Calderon. Vehicular Networks on Two Madrid Highways. [Technical Report] 2014.
ffhal-00959837v1
[33] Fellendorf, M. (1994, October). VISSIM: A microscopic simulation tool to evaluate
actuated signal control including bus priority. In 64th Institute of Transportation
Engineers Annual Meeting (Vol. 32, pp. 1-9). Springer.
[34] https://www.nsnam.org/docs/release/3.29/tutorial/ns-3-tutorial.pdf Accedido en
agosto de 2019
[35] https://en.wikipedia.org/wiki/Ns_(simulator)#Design Accedido en agosto de 2019
[36] Yuste-Delgado, Antonio, et al. Simulación de redes móviles ad hoc mediante
ns-3. 2014. https://riuma.uma.es/xmlui/handle/10630/7264 Accedido en
agosto de 2019
52

[37] http://mighthelpyou.blogspot.com/2016/04/flow-monitor-in-ns3-perfect-tool -
for.htm l Accedido en agosto de 2019.
[38] https://www.nsnam.org/wiki/NetAnim Accedido en agosto de 2019
[39] https://en.wikipedia.org/wiki/IEEE_802.11p Accedido en agosto de 2019
[40] https://es.wikipedia.org/wiki/Wireless_Access_in_Vehicular_Environments
Accedio en agosto de 2019
[41] https://standards.ieee.org/content/ieee-standards/en/standard/1609_0-2019.html
Accedido en agosto de 2019
[42] https://standards.ieee.org/standard/1609_1-2006.html Accedido en agosto de 2019
[43] https://standards.ieee.org/standard/1609_2-2016.html Accedido en agosto de 2019
[44] https://standards.ieee.org/standard/1609_3-2016.html Accedido en agosto de 2019
[45] https://standards.ieee.org/standard/1609_4-2016.html Accedido en agosto de 2019
[46] https://standards.ieee.org/standard/1609_11-2010.html Accedido en agosto de 2019
[47] https://standards.ieee.org/standard/1609_12-2016.html Accedido en agosto de 2019
[48] Alessio Filippi, Kees Moerman, Gerardo Daalderop, Paul D. Alexander, et. al.
Ready to roll: Why 802.11p beats LTE and 5G for V2x. A white paper by NXP
Semiconductors, Cohda Wireless, and Siemens. 21 de Abril de 2016.
[49] Wu, C., Ohzahata, S., & Kato, T. (2013). Flexible, portable, and practicable
solution for routing in VANETs: A fuzzy constraint Q-learning approach. IEEE
Transactions on Vehicular Technology, 62(9), 4251-4263.
[50] Perkins, C., Belding-Royer, E., & Das, S. (2003). RFC 3561: Ad hoc on-demand
distance vector (AODV) routing. Internet RFCs, 1-38.
[51] Perkins, C., Chakeres, I., & Belding-Royer, E. (2013). Dynamic MANET on-
demand (AODVv2) routing.
[52] Anamalamudi, S.; Zhang, M.; Sangi, A.R.; Perkins, C.E.; Anand, S.; (Remy), B.L.
Asymmetric AODV-P2P-RPL in Low-Power and Lossy Networks (LLNs). In
Internet-Draft draft-ietf-roll-aodv-rpl-03; Work in Progress; Internet Engineering
Task Force: Fremont, CA, USA, 2018.
[53] Clausen, T., & Jacquet, P. (2003). Rfc3626: Optimized link state routing protocol
(olsr). Experimental, http://www. ietf. org/rfc/rfc3626. txt, 51.
53

[54] Herberg, U., Clausen, T., Jacquet, P., & Dearlove, C. (2014). The optimized link
state routing protocol version 2. Internet Engineering Task Force. RFC 7181.
[55] https://www.nsnam.org/wiki/RoutesMobilityModel Accedido el 25 de Agosto de
2019
[56] Aguilera, F. T., Delgado, A. Y., Cabrera, A. T., Perez, E. C., & Estrella, A. D.
(2008). Interconnecting MANET and the Internet. A mobility approach. In The
33rd Annual IEEE Conference on Local Computer Networks (LCN08). Montreal,
Canada (October 2008)(not held yet).
54