Electrónica y robótica - Editorial Casals · 2015-05-26 · Tecnología y ciencia ficción Las...
20
4 Electrónica y robótica Tecnología y ciencia ficción Las leyes de la robótica Yo, robot (2004) de Alex Proyas. 1 ¿Cuáles son las tres leyes de la robótica? 2 ¿Añadirías o variarías alguna de esas leyes? 3 ¿Podrán algún día los robots tener sentimientos? ¿Y dominarnos?
Transcript of Electrónica y robótica - Editorial Casals · 2015-05-26 · Tecnología y ciencia ficción Las...

4 Electrónicay robótica
Tecnología y ciencia ficciónLas leyes de la robótica
Yo, robot (2004) de Alex Proyas.
1
¿Cuáles son las tres leyes
de la robótica?
2
¿Añadirías o variarías
alguna de esas leyes?
3
¿Podrán algún día los robots tener sentimientos?
¿Y dominarnos?
La robótica como riesgo
La pregunta acerca del riesgo que suponen las máquinas para la humanidad,
tal y como se la plantean alarmados científicos de la talla de Stephen Hawking,
además de enferma de optimismo, llega tarde. La imagen de un mundo
arrasado por Skynet no es más que una fabulación pedestre que no hace
justicia a la realidad.
La distopía, para entendernos, es esto, nada tiene que ver con la ficción.
Podemos fabular con un futuro a imagen de Walking dead, que básicamente
propone la superación del Homo sapiens por una nueva especie de muertos
en vida. Eso o compartir con la película recién estrenada Ex Machina
la posibilidad de una superación civilizada de nuestras deficiencias genéticas
por máquinas necesariamente mejores, menos falibles.
Pero, insistimos, ya es tarde. Un estudio reciente demuestra que en 2050
se necesitarán el equivalente a tres planetas para el abastecimiento natural
de todos nosotros. Ya consumimos muy por encima de la capacidad que
tiene la Tierra de proveernos de recursos de manera renovable.
Y nos acercamos al límite con paso decidido. Si a esto sumamos la forma tan
profundamente injusta de repartir la riqueza (el 1% posee el 50%) ya sí
podemos aceptar que, como proyecto, somos lo más parecido a un fracaso.
En este panorama, la pregunta por la amenaza que supondría una Thermomix
con conciencia (suponiendo que no la tenga ya) se antoja retórica.
¿Por qué no darle una oportunidad? Peor que nosotros no puede hacerlo.
Luis Martínez, «Llegan tarde las máquinas».
El Mundo (1 de marzo de 2015) (adaptación)
1. ¿Qué es una distopía?
2. ¿Por qué plantea el autor que «es tarde» para la humanidad?
3. Compara el futuro que plantean películas como Terminator
y Ex Machina, o la serie Walking Dead, con algún libro o película
que conozcas con el que estés de acuerdo. Di si se trata
de utopías o distopías.
4. Organizaos en grupos y, con ayuda del profesor o profesora,
reflexionad sobre el papel que podrían desempeñar las máquinas
cuando tengáis 70 años. Presentad vuestras ideas en clase.
Unidad 4. Electrónica y robótica
68
1. Introducción a la robótica
El siglo XXI ha marcado un antes y un después a muchos niveles, entre ellos el de la tecnología. Es habitual encontrar en nuestros hogares ordenadores, teléfonos móviles, tabletas u otros dispositivos llamados «inteligentes». También están presentes en nues-tro entorno más cercano, muchas veces sin que seamos conscientes de ello: en esta-blecimientos, en el transporte público e, incluso, integrados en el mobiliario urbano. El concepto Smart City y las mejoras en el ámbito de la robótica han contribuido a ello.
Un robot es un mecanismo articulado que desarrolla movimientos o funciones automá-ticas, siguiendo instrucciones externas o unas reglas que le han sido incorporadas. La robótica es una rama de la tecnología centrada, sobre todo, en el diseño, la programa-ción y la construcción de robots.
Desde que Herón de Alejandría (siglo I) creara el primer autómata, la robótica ha evolu-cionado lentamente hasta llegar a una verdadera revolución en el siglo XX. La estrecha relación con la tecnología ha contribuido a ello, y actualmente existen artilugios impensa-bles veinte años atrás. Los androides o robots humanoides, los robots domésticos o los que se utilizan en misiones especiales (como en el espacio u otros ambientes hostiles para la vida) son un ejemplo de ello.
La robótica camina hacia una nueva época: la llamada era cíborg. En ella los componen-tes tecnológicos se integrarán en la biología humana, como ya sucede con algunos im-plantes oculares, cocleares o de miembros que son funcionales. Un cíborg (del acrónimo inglés formado por cyber ‘cibernético’ y organism ‘organismo’) es una criatura compuesta de elementos orgánicos y tecnológicos.
Ahora bien, si analizamos las ventajas e inconvenientes de la implantación de la robótica en la sociedad podemos enumerar algunos pros y contras:
Algunos de los contras han abierto serios debates sobre el futuro de la robótica dentro de la sociedad humana, especulando sobre la desaparición del ser humano y la aparición de una nueva sociedad: la de los robots. O quizá la de los cíborgs.
PROS
En la industria, fabricación de productos de mejor calidad, precisión y uniformidad.
Confort y comodidad en el día a día. Reducción del trabajo pesado o peligroso.
Reducción de puestos de trabajo. Dependencia con respecto a algunos dispositivos y productos, sobre todo a nivel doméstico.
Mal uso de robots militares o armados.
CONTRAS
Los automatismos son los primeros robots propia-mente conocidos. Actualmente se usan más como juguetes, pero en sus orígenes fueron un gran in-vento.
El ejemplo más paradigmático de robot se encuentra en el entorno industrial, donde los brazos robóticos manipulan piezas con gran precisión.
Un androide es un robot de forma humana o huma-noide. El objetivo es que pueda interactuar con las personas de forma amigable, siendo más o menos autónomo.
Unidad 4. Electrónica y robótica
69
2. Control de sistemas
Una familia llega a casa y decide poner la calefacción a 18 ºC. Cuando la vivienda se calienta y llega a la temperatura establecida, el termostato envía una señal al calentador para que se pare, hasta que detecta que la temperatura desciende por debajo de los 18 ºC y se vuelve a encender. Para que este proceso sea efectivo es necesario tener un control del sistema.
La calefacción de una vivienda es uno de los muchos ejemplos cotidianos en los que un sistema debe ser controlado. El consumo de energía, encender y apagar una lámpara, mover un objeto con un brazo robótico o el riego automático son ejemplos del día a día en los que interviene un sistema de control.
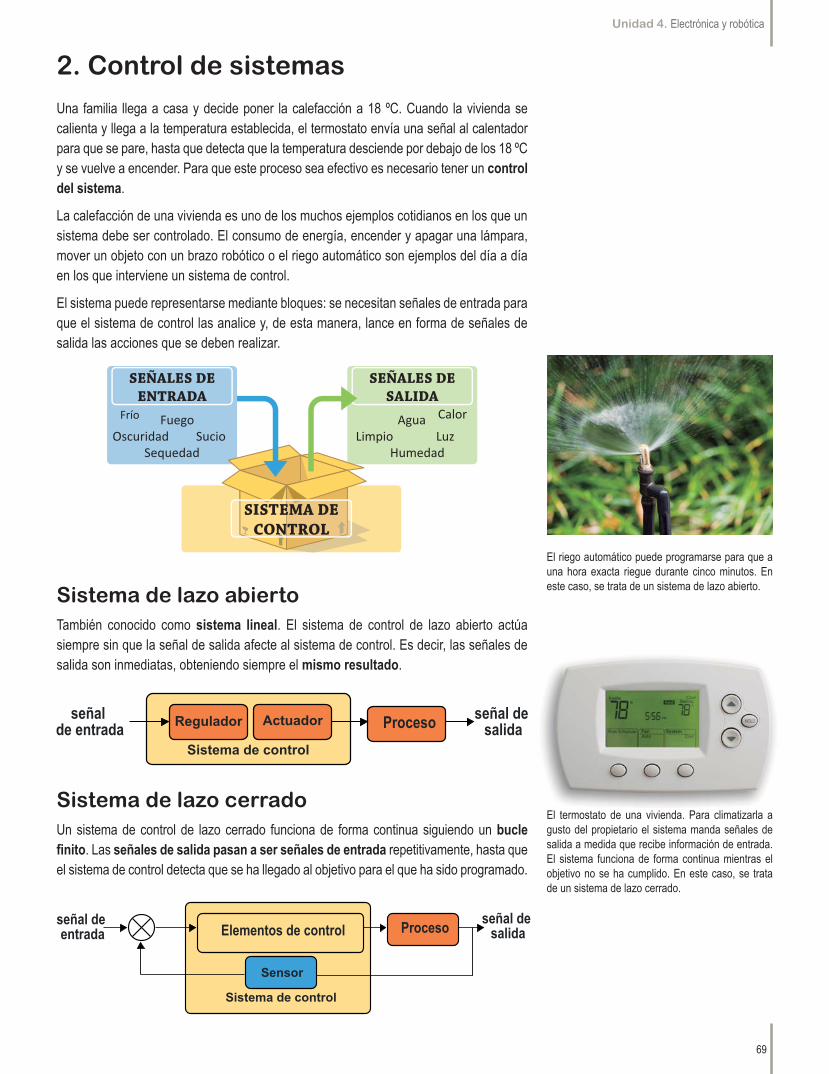
El sistema puede representarse mediante bloques: se necesitan señales de entrada para que el sistema de control las analice y, de esta manera, lance en forma de señales de salida las acciones que se deben realizar.
Sistema de lazo abiertoTambién conocido como sistema lineal. El sistema de control de lazo abierto actúa siempre sin que la señal de salida afecte al sistema de control. Es decir, las señales de salida son inmediatas, obteniendo siempre el mismo resultado.
Sistema de lazo cerradoUn sistema de control de lazo cerrado funciona de forma continua siguiendo un bucle
nito. Las señales de salida pasan a ser señales de entrada repetitivamente, hasta que el sistema de control detecta que se ha llegado al objetivo para el que ha sido programado.
El riego automático puede programarse para que a una hora exacta riegue durante cinco minutos. En este caso, se trata de un sistema de lazo abierto.
El termostato de una vivienda. Para climatizarla a gusto del propietario el sistema manda señales de salida a medida que recibe información de entrada. El sistema funciona de forma continua mientras el objetivo no se ha cumplido. En este caso, se trata de un sistema de lazo cerrado.
señal de entrada Elementos de control Proceso
señal de salida
SEÑALES DEENTRADA
Frío FuegoOscuridad Sucio
Sequedad
SEÑALES DESALIDA
CalorAguaLimpio Luz
Humedad
SISTEMA DECONTROL
70
3. Arquitectura de un robot
Un robot industrial es un brazo mecánico jado a una base que articula sus distintas piezas para realizar las tareas para las que ha sido programado.
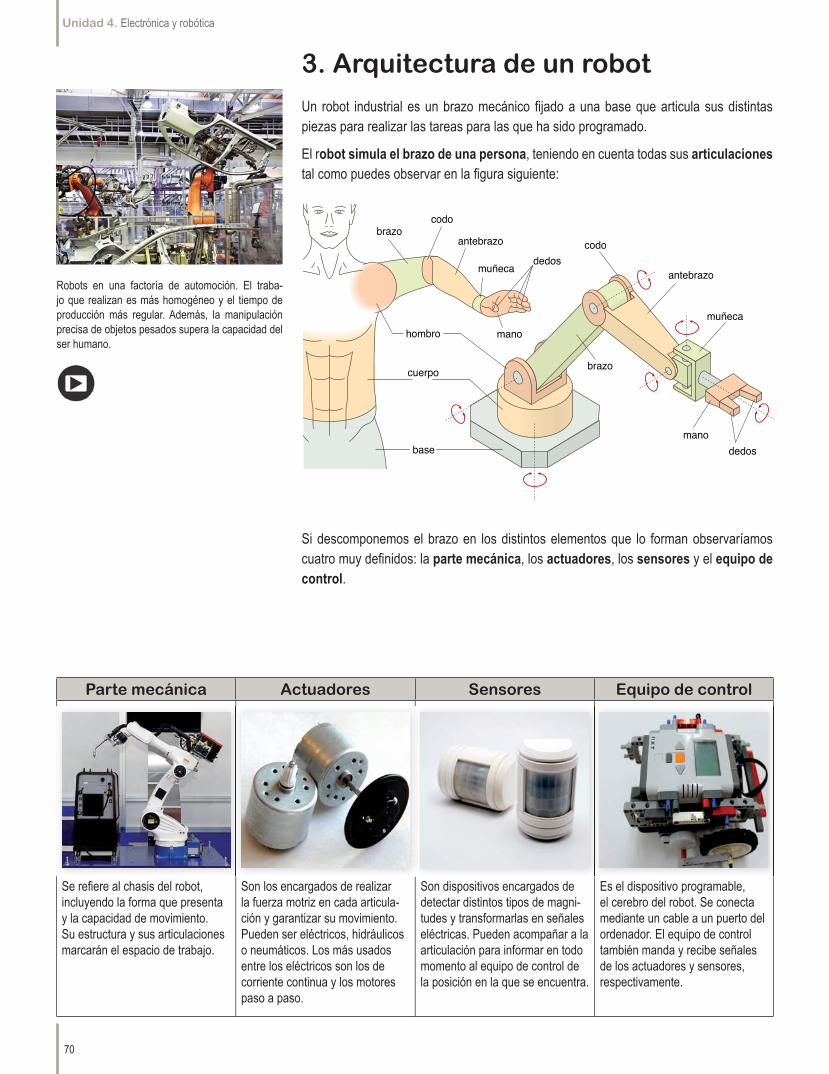
El robot simula el brazo de una persona, teniendo en cuenta todas sus articulaciones tal como puedes observar en la gura siguiente:
Si descomponemos el brazo en los distintos elementos que lo forman observaríamos cuatro muy de nidos: la parte mecánica, los actuadores, los sensores y el equipo de control.
Parte mecánica Actuadores Sensores Equipo de control
Se re ere al chasis del robot, incluyendo la forma que presenta y la capacidad de movimiento. Su estructura y sus articulaciones marcarán el espacio de trabajo.
Son los encargados de realizar la fuerza motriz en cada articula-ción y garantizar su movimiento. Pueden ser eléctricos, hidráulicos o neumáticos. Los más usados entre los eléctricos son los de corriente continua y los motores paso a paso.
Son dispositivos encargados de detectar distintos tipos de magni-tudes y transformarlas en señales eléctricas. Pueden acompañar a la articulación para informar en todo momento al equipo de control de la posición en la que se encuentra.
Es el dispositivo programable, el cerebro del robot. Se conecta mediante un cable a un puerto del ordenador. El equipo de control también manda y recibe señales de los actuadores y sensores, respectivamente.
Robots en una factoría de automoción. El traba-jo que realizan es más homogéneo y el tiempo de producción más regular. Además, la manipulación precisa de objetos pesados supera la capacidad del ser humano.
Unidad 4. Electrónica y robótica

71
La placa Arduino es una plataforma de hardware libre que se conecta a un ordenador y actúa como controladora. Facilita el uso de la electrónica en pro-yectos multidisciplinares.
Elemento terminal de uso cientí co.
Aplicaciones de la robótica
Servicios. Desarrolla tareas de ayuda a las personas. Se emplea, sobre todo, en el cam-po de la medicina, la seguridad o las tareas del hogar, como por ejemplo, las aspiradoras automáticas.
Industria. Permiten realizar trabajos pesados, peligrosos y repetitivos de forma precisa. Los brazos robóticos, los manipula-dores o los micro y nanorobots son los más usados.
Educación. Lego, Robotis Kidslab o Arduino son algunos de los programas y plataformas que existen cuyo objetivo es introducir la robótica entre el público no especialista.
Exploración. Se usan para explorar zonas peligrosas o de difícil acceso, como minas, galerías, áreas contaminadas, el océano o el espacio. Un ejemplo es el vehículo marciano Opportunity.
Entretenimiento. Cada vez son más populares los juguetes robóticos, como los drones o las mascotas interactivas (Aibo, por ejemplo).
Otros. Dependiendo de la función que se requiera, pueden diseñarse robots especí -cos. Pueden ser quirúrgicos, de transporte, bélicos o que desarticulen bombas, entre otras muchas aplicaciones.
Sistemas de controlEl sistema de control es el encargado de asegurar que las acciones realizadas por el robot cumplen con el objetivo para el que ha sido programado. Esta unidad capta las señales de los sensores y envía a los actuadores órdenes acordes con el programa interno del sistema.
Normalmente para programar un robot se usa un sistema de control mediante orde-nador. Para poder programar el robot es común usar un sistema de control mediante un ordenador. Este sistema se construye con un ordenador y una controladora, que es la encargada de recibir las señales de los sensores y de mandar las órdenes a los actuado-res. Los datos se procesan mediante la controladora conectada al ordenador, que será el que dispondrá del programa que procesa las señales.
Por otro lado, también es posible encontrar robots controlados mediante un circuito elec-trónico programable integrado dentro el robot. En este caso el robot no necesita estar conectado al ordenador. Un ejemplo sería un juguete animado.
Elementos terminalesTodos los brazos mecánicos usan como dedo un elemento terminal, encargado de desa-rrollar una acción concreta según el tipo de trabajo que deba realizar. Los más comunes son los que se emplean como elemento de sujeción o herramienta, y los podemos en-contrar en fábricas, hospitales, laboratorios u otros campos.
Los elementos terminales emulan, y algunas veces superan, la destreza y versatilidad de la mano humana. En la imagen lateral puedes observar un ejemplo aplicado al campo cientí co. La aguja administra dosis líquidas con gran rapidez y precisión, evitando a los investigadores una tarea tediosa sujeta a errores.
yectos u t d sc p a es
S
da
d
Esqr
Unidad 4. Electrónica y robótica

proyecto paso a pasoConstrucción de un joystick
y programación de un videojuego
1. Introducción
La finalidad de este proyecto es construir un joystick para PC totalmente funcional. Para ello, se emplearán conocimientos de varias disciplinas como la progra-mación, la robótica, y la electrónica analógica y di-gital.
El control de sistemas que se empleará es el Arduino Uno, una plataforma de hardware libre basada en una placa con un microcontrolador y un entorno de desarro-llo. Está diseñada para facilitar el uso de la electrónica en proyectos multidisciplinares.
Este hardware se asociará al software de programación S4A, una modificación de Scratch que proporciona una forma de programación sencilla y gráfica que consiste en arrastrar bloques de programación de manera muy intuitiva.
Este proyecto se debe desarrollar en el taller.
Materiales y herramientasTabla de madera de 300 × 200 × 3 mmCola blancaMotor de CC de 5 VCuatro tornillos y sus arandelasDos potenciómetros 1 kCables de conexión eléctricaCable conexión a PCUna placa Arduino UnoUn PC (sistema Windows, Mac o Linux)Papel de lijaLlave fija del 14Estaño y soldadorPolímetroSierra de marqueteríaTaladro y brocas del 2, 6 y 10
72
2. Construcción del joystick
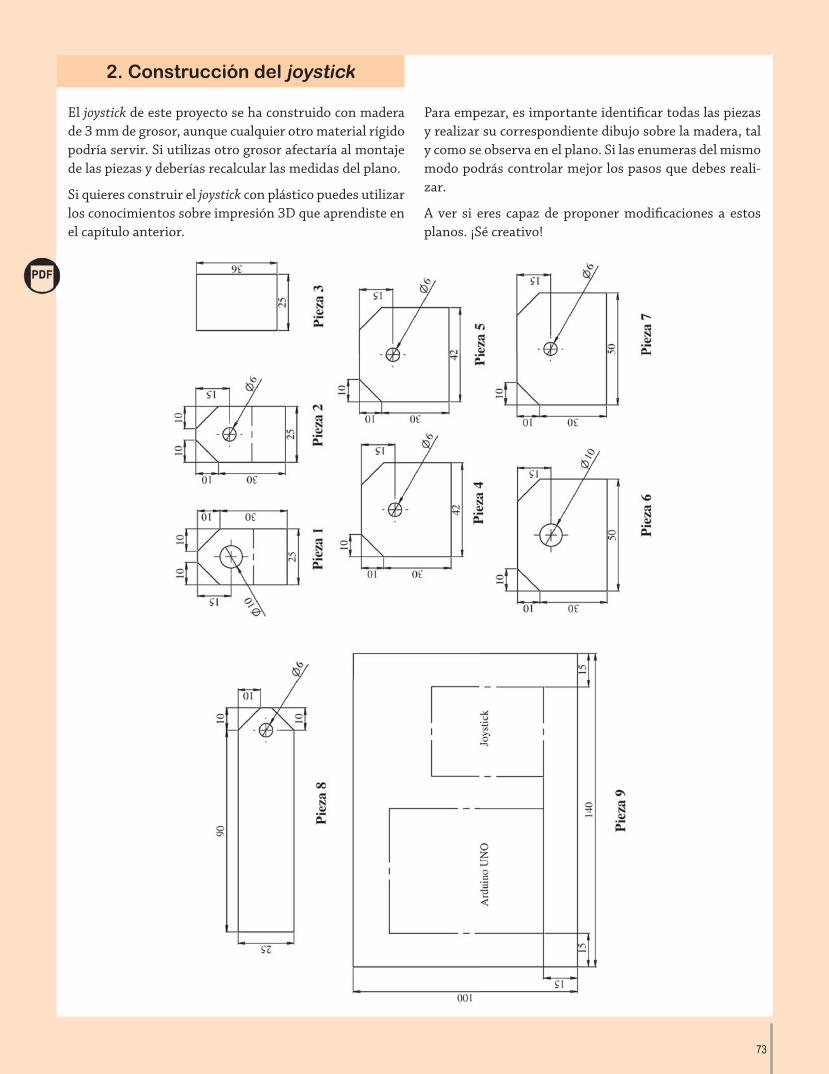
El joystick de este proyecto se ha construido con madera de 3 mm de grosor, aunque cualquier otro material rígido podría servir. Si utilizas otro grosor afectaría al montaje de las piezas y deberías recalcular las medidas del plano.
Si quieres construir el joystick con plástico puedes utilizar los conocimientos sobre impresión 3D que aprendiste en el capítulo anterior.
Para empezar, es importante identificar todas las piezas y realizar su correspondiente dibujo sobre la madera, tal y como se observa en el plano. Si las enumeras del mismo modo podrás controlar mejor los pasos que debes reali-zar.
A ver si eres capaz de proponer modificaciones a estos planos. ¡Sé creativo!
73
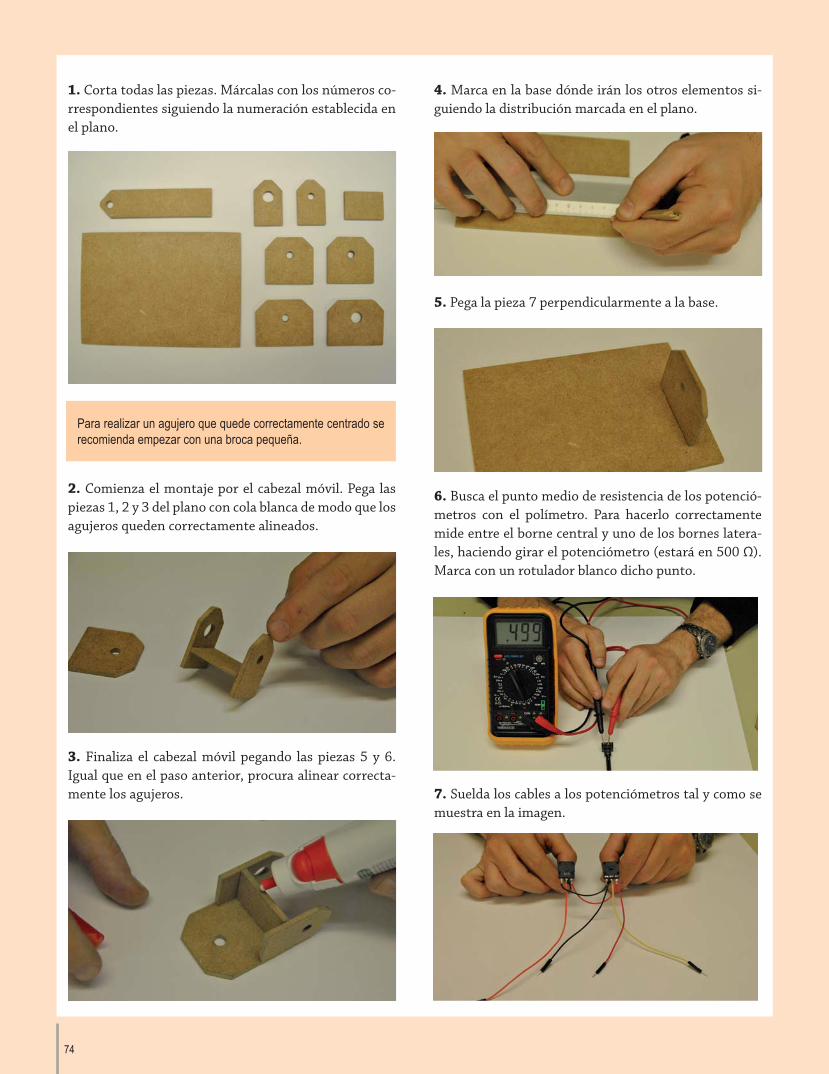
1. Corta todas las piezas. Márcalas con los números co-rrespondientes siguiendo la numeración establecida en el plano.
2. Comienza el montaje por el cabezal móvil. Pega las piezas 1, 2 y 3 del plano con cola blanca de modo que los agujeros queden correctamente alineados.
3. Finaliza el cabezal móvil pegando las piezas 5 y 6. Igual que en el paso anterior, procura alinear correcta-mente los agujeros.
4. Marca en la base dónde irán los otros elementos si-guiendo la distribución marcada en el plano.
5. Pega la pieza 7 perpendicularmente a la base.
6. Busca el punto medio de resistencia de los potenció-metros con el polímetro. Para hacerlo correctamente mide entre el borne central y uno de los bornes latera-les, haciendo girar el potenciómetro (estará en 500 Ω). Marca con un rotulador blanco dicho punto.
7. Suelda los cables a los potenciómetros tal y como se muestra en la imagen.
Para realizar un agujero que quede correctamente centrado se recomienda empezar con una broca pequeña.
74
3. Montaje del joystick
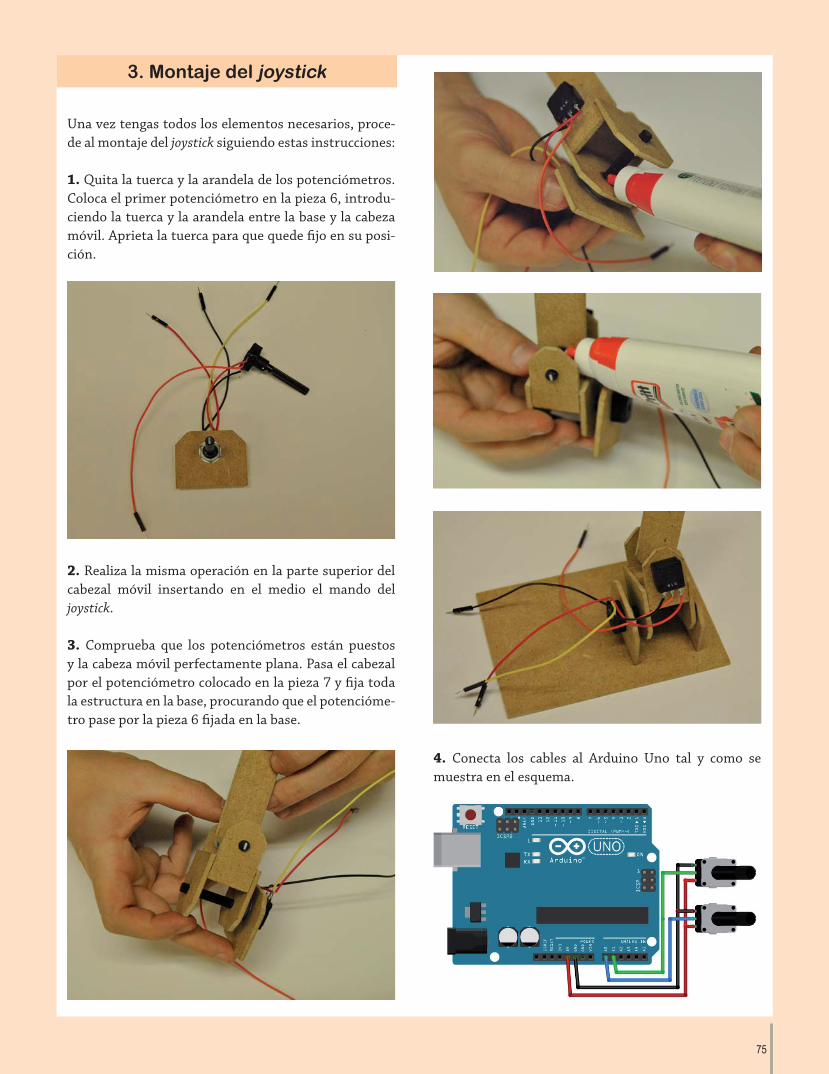
Una vez tengas todos los elementos necesarios, proce-de al montaje del joystick siguiendo estas instrucciones:
1. Quita la tuerca y la arandela de los potenciómetros. Coloca el primer potenciómetro en la pieza 6, introdu-ciendo la tuerca y la arandela entre la base y la cabeza móvil. Aprieta la tuerca para que quede fijo en su posi-ción.
2. Realiza la misma operación en la parte superior del cabezal móvil insertando en el medio el mando del joystick.
3. Comprueba que los potenciómetros están puestos y la cabeza móvil perfectamente plana. Pasa el cabezal por el potenciómetro colocado en la pieza 7 y fija toda la estructura en la base, procurando que el potencióme-tro pase por la pieza 6 fijada en la base.
4. Conecta los cables al Arduino Uno tal y como se muestra en el esquema.
75
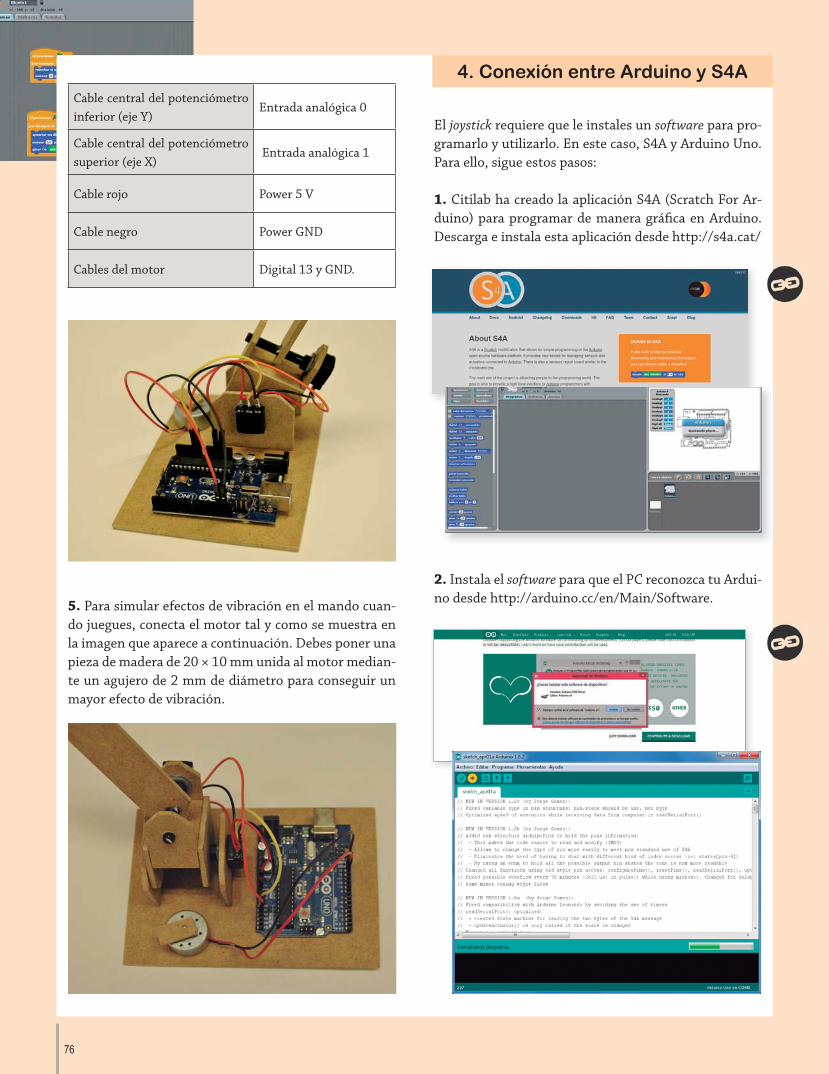
4. Conexión entre Arduino y S4ACable central del potenciómetro inferior (eje Y)
Entrada analógica 0
Cable central del potenciómetro superior (eje X)
Entrada analógica 1
Cable rojo Power 5 V
Cable negro Power GND
Cables del motor Digital 13 y GND.
5. Para simular efectos de vibración en el mando cuan-do juegues, conecta el motor tal y como se muestra en la imagen que aparece a continuación. Debes poner una pieza de madera de 20 × 10 mm unida al motor median-te un agujero de 2 mm de diámetro para conseguir un mayor efecto de vibración.
El joystick requiere que le instales un software para pro-gramarlo y utilizarlo. En este caso, S4A y Arduino Uno. Para ello, sigue estos pasos:
1. Citilab ha creado la aplicación S4A (Scratch For Ar-duino) para programar de manera gráfica en Arduino. Descarga e instala esta aplicación desde http://s4a.cat/
2. Instala el software para que el PC reconozca tu Ardui-no desde http://arduino.cc/en/Main/Software.
76
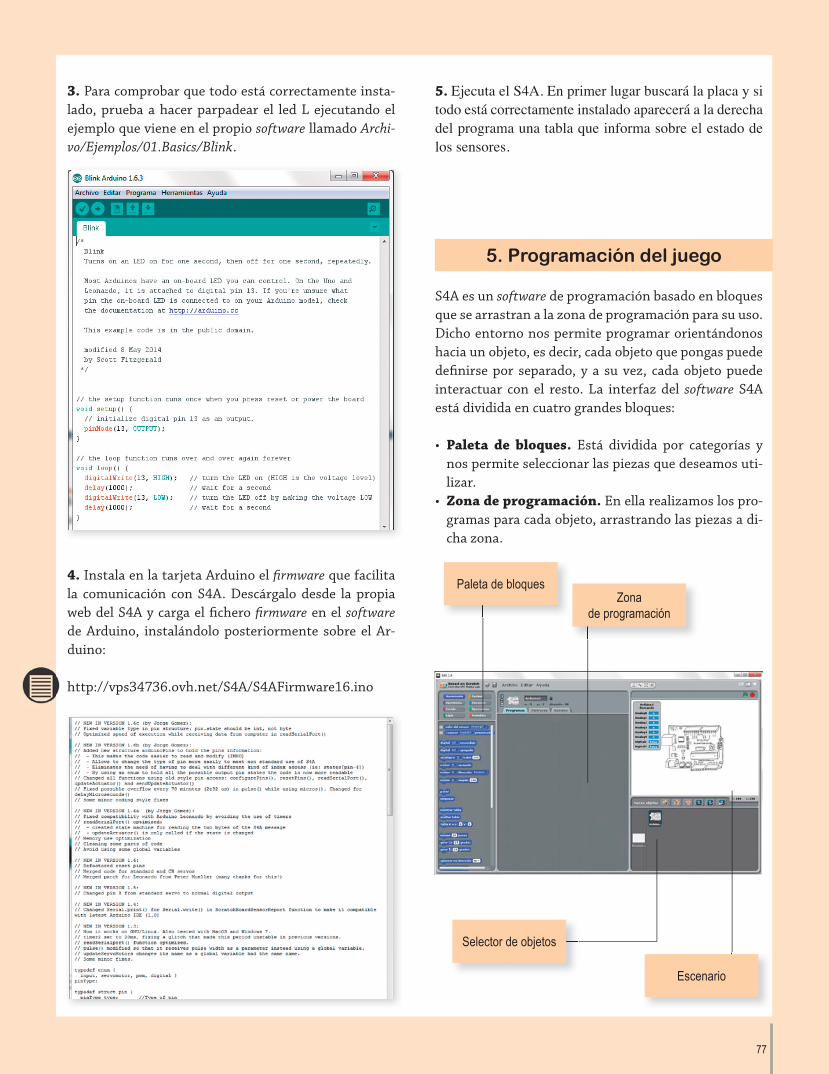
5. Ejecuta el S4A. En primer lugar buscará la placa y si todo está correctamente instalado aparecerá a la derecha del programa una tabla que informa sobre el estado de los sensores.
S4A es un software de programación basado en bloques que se arrastran a la zona de programación para su uso. Dicho entorno nos permite programar orientándonos hacia un objeto, es decir, cada objeto que pongas puede definirse por separado, y a su vez, cada objeto puede interactuar con el resto. La interfaz del software S4A está dividida en cuatro grandes bloques:
Paleta de bloques. Está dividida por categorías y nos permite seleccionar las piezas que deseamos uti-lizar.
Zona de programación. En ella realizamos los pro-gramas para cada objeto, arrastrando las piezas a di-cha zona.
5. Programación del juego
3. Para comprobar que todo está correctamente insta-lado, prueba a hacer parpadear el led L ejecutando el ejemplo que viene en el propio software llamado Archi-vo/Ejemplos/01.Basics/Blink.
4. Instala en la tarjeta Arduino el firmware que facilita la comunicación con S4A. Descárgalo desde la propia web del S4A y carga el fichero firmware en el software de Arduino, instalándolo posteriormente sobre el Ar-duino:
http://vps34736.ovh.net/S4A/S4AFirmware16.ino
77
Paleta de bloques
Selector de objetos
Zonade programación
Escenario
Escenario. Permite visualizar lo que estamos pro-gramando y muestra la tabla activando la bandera verde.Selector de objetos. Sirve para seleccionar y crear los objetos que queramos programar y definir los fon-dos o escenarios. Las funciones de actuación sobre la tarjeta Arduino Uno se encuentran dentro de la pale-ta de bloques, en el bloque Movimiento, identificado con un recuadro azul.
El juego que vas a crear es una demostración sencilla para que empieces a comprender cómo interactuar con la placa Arduino y el software S4A. Se trata de una nave que debe evitar ser golpeada por un asteroide. Cada vez que el asteroide la golpee, el mando del joystick vibrará.
Los pasos que seguir para realizar el juego son los si-guientes:
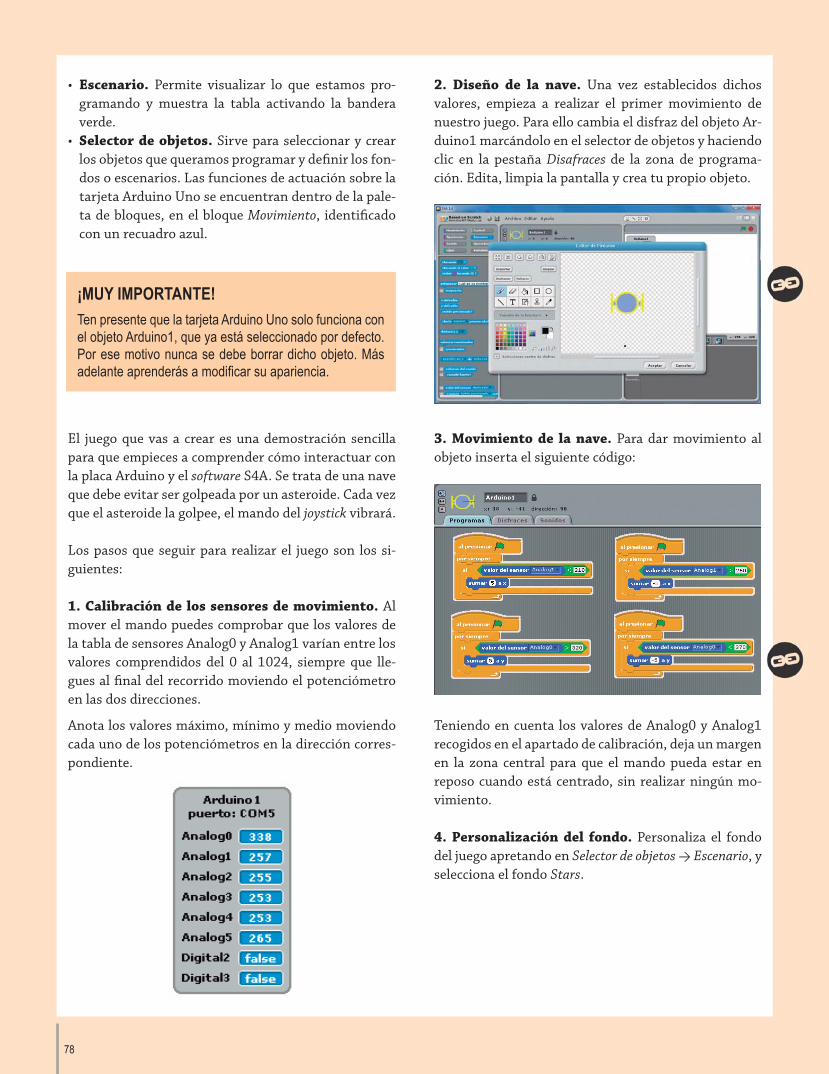
1. Calibración de los sensores de movimiento. Al mover el mando puedes comprobar que los valores de la tabla de sensores Analog0 y Analog1 varían entre los valores comprendidos del 0 al 1024, siempre que lle-gues al final del recorrido moviendo el potenciómetro en las dos direcciones.
Anota los valores máximo, mínimo y medio moviendo cada uno de los potenciómetros en la dirección corres-pondiente.
2. Diseño de la nave. Una vez establecidos dichos valores, empieza a realizar el primer movimiento de nuestro juego. Para ello cambia el disfraz del objeto Ar-duino1 marcándolo en el selector de objetos y haciendo clic en la pestaña Disafraces de la zona de programa-ción. Edita, limpia la pantalla y crea tu propio objeto.
3. Movimiento de la nave. Para dar movimiento al objeto inserta el siguiente código:
Teniendo en cuenta los valores de Analog0 y Analog1 recogidos en el apartado de calibración, deja un margen en la zona central para que el mando pueda estar en reposo cuando está centrado, sin realizar ningún mo-vimiento.
4. Personalización del fondo. Personaliza el fondo del juego apretando en Selector de objetos → Escenario, y selecciona el fondo Stars.
78
¡MUY IMPORTANTE!Ten presente que la tarjeta Arduino Uno solo funciona con el objeto Arduino1, que ya está seleccionado por defecto. Por ese motivo nunca se debe borrar dicho objeto. Más adelante aprenderás a modi car su apariencia.
5. Creación del asteroide y movimiento. Crea un objeto nuevo en el Selector de objetos. Inserta el siguien-te código para que pueda moverse libremente por la pantalla:
6. Creación de más asteroides. Puedes duplicar los asteroides haciendo clic sobre él dentro del selector de objetos. Puedes modificar el programa de cada asteroi-de dotándolos diferentes velocidades, indicando una condición para finalizar el juego, etc.
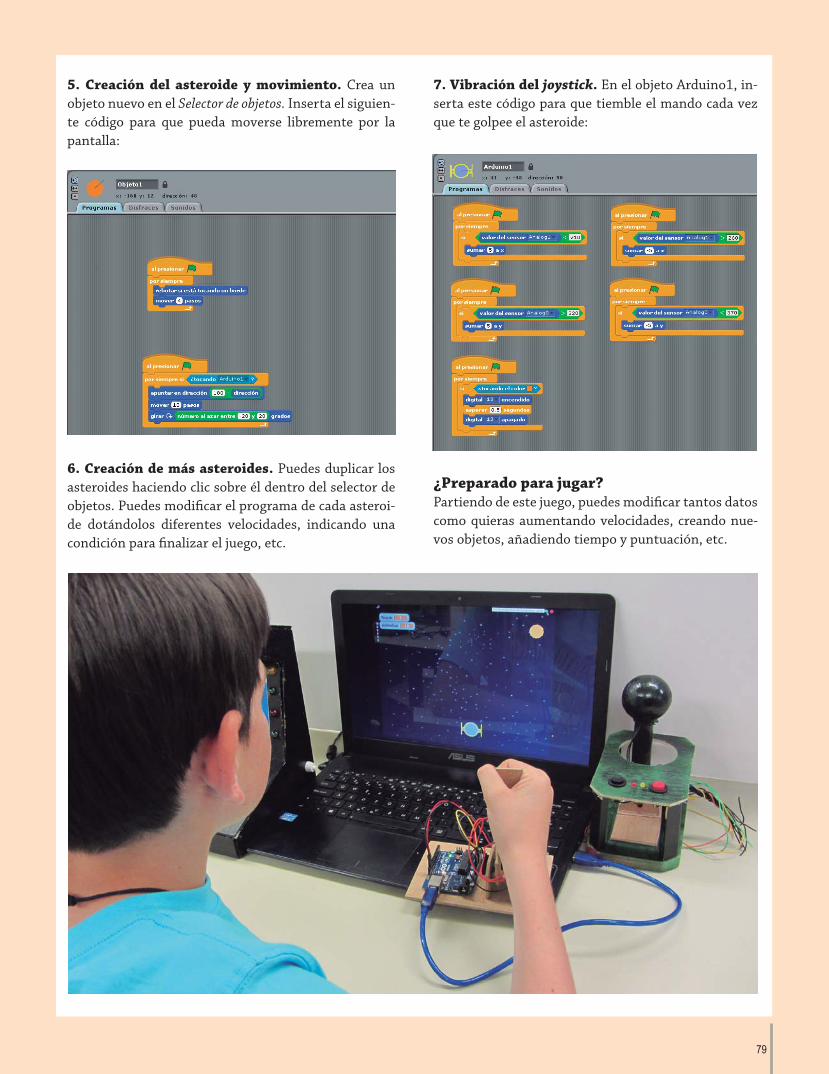
7. Vibración del joystick. En el objeto Arduino1, in-serta este código para que tiemble el mando cada vez que te golpee el asteroide:
¿Preparado para jugar?Partiendo de este juego, puedes modificar tantos datos como quieras aumentando velocidades, creando nue-vos objetos, añadiendo tiempo y puntuación, etc.
79
80
BANCO DE ACTIVIDADES
1. CS CL Los autómatas son los primeros «robots» reconocidos como tal. La primera persona que recopiló información sobre los autómatas fue He-rón de Alejandría (siglo i d. C). Busca información sobre los autómatas de esa época y compáralos con los actuales.
2. CA CL Las lámparas de un jardín se encienden de forma automática cuando la luz exterior es inferior a un parámetro establecido por el propietario. Reflexiona si se trata de un siste-ma de control de lazo abierto o de lazo cerra-do, y realiza un esquema de cómo funcionaría ese sistema.
3. Busca y explica las diferencias entre un motor de corriente continua y un motor paso a paso.
4. CA CS CL A menudo se dice que el robot termi-nará controlando al hombre. Lee el siguiente fragmento de la novela Yo, Robot (Isaac Asi-mov, 1950) y contesta a las preguntas.
«Fíjate en ti. No lo digo con ánimo de desprecio, pero fíjate bien. El material del que estás hecho es blando y ojo, carece de resistencia, y su energía depende de la oxidación ine ciente del material orgánico. ...
Entráis periódicamente en coma, y la menor variación de temperatura, presión atmosférica, la humedad o la intensidad de radiación afecta a vuestra e ciencia. Sois alterables. Yo, por el contrario, soy un producto acabado. Absorbo energía eléctrica directamente y la utilizo con casi un ciento por ciento de e ciencia. Es-toy compuesto de fuerte metal, permanezco conscien-te todo el tiempo y puedo soportar fácilmente los más extremados cambios ambientales. Estos son hechos que, partiendo de la irrefutable proposición de que ningún ser puede crear un ser más perfecto que él, reduce vuestra tonta teoría a la nada.»a) ¿Qué personaje crees que habla y sobre
qué especie habla?b) ¿A qué conclusión llega el personaje prin-
cipal?c) Busca información sobre las «tres teorías
de la robótica» enunciadas por Asimov y reflexiona sobre si, a día de hoy, las man-tendrías.
5. CC Busca información sobre competiciones de robótica para alumnos de tu edad. Explica cómo funcionan y el material y los conoci-mientos que se necesitan para participar.
6. Los robots EV3 de la marca LEGO utilizan unos bloques muy sencillos para programar. Busca in-formación sobre cuáles son y explica sus caracte-rísticas.
CI CA Actividades sobre el proyecto
Montaje
7. ¿Cuál es el valor máximo que puede tomar el sen-sor Analog0?
8. Si el sensor Analog0 indica el valor 512, ¿qué ten-sión le llega a la entrada Analog0 del Arduino?
9. Explica qué modificaciones y mejoras realizarías.
Programación
10. ¿Cuál es el tamaño de la pantalla de visualización del juego en S4A?
11. ¿Para qué sirve una variable?
12. ¿Por qué se tienen que poner las variables a 0 al comenzar el juego?
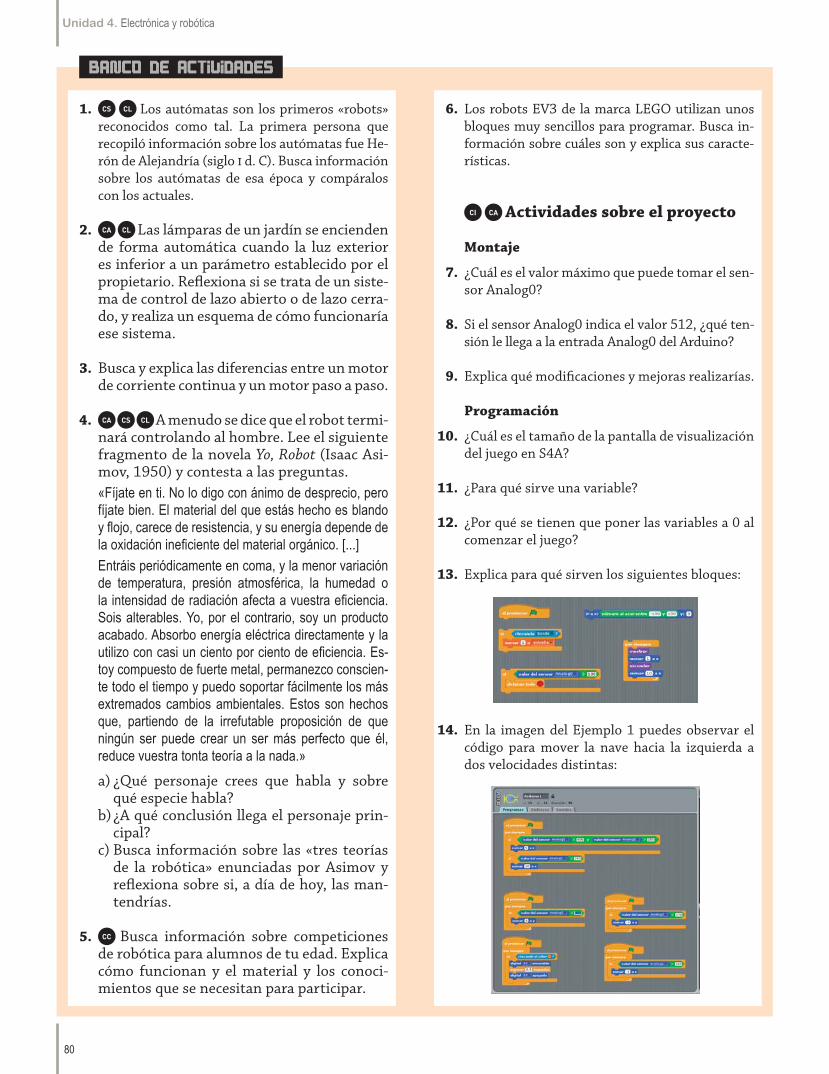
13. Explica para qué sirven los siguientes bloques:
14. En la imagen del Ejemplo 1 puedes observar el código para mover la nave hacia la izquierda a dos velocidades distintas:
Unidad 4. Electrónica y robótica
81
BANCO DE ACTIVIDADES
Programa para que, dependiendo de la posición del joystick, la nave varíe su velocidad. Juega con los valores de los sensores Analog1 (eje X) y Ana-log2 (eje Y) para que la velocidad de la nave incre-mente en función de la inclinación del joystick en todos los ejes.
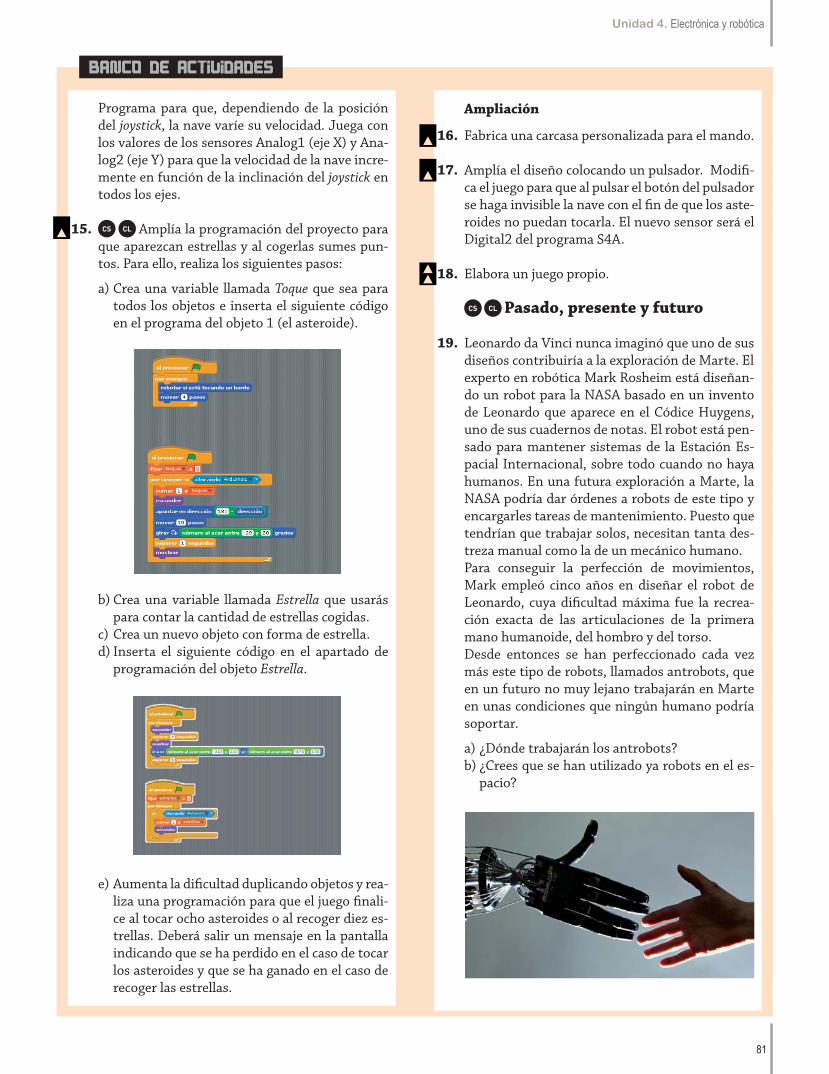
15. CS CL Amplía la programación del proyecto para que aparezcan estrellas y al cogerlas sumes pun-tos. Para ello, realiza los siguientes pasos:
a) Crea una variable llamada Toque que sea para todos los objetos e inserta el siguiente código en el programa del objeto 1 (el asteroide).
b) Crea una variable llamada Estrella que usarás
para contar la cantidad de estrellas cogidas.c) Crea un nuevo objeto con forma de estrella.d) Inserta el siguiente código en el apartado de
programación del objeto Estrella.
e) Aumenta la dificultad duplicando objetos y rea-liza una programación para que el juego finali-ce al tocar ocho asteroides o al recoger diez es-trellas. Deberá salir un mensaje en la pantalla indicando que se ha perdido en el caso de tocar los asteroides y que se ha ganado en el caso de recoger las estrellas.
Ampliación
16. Fabrica una carcasa personalizada para el mando.
17. Amplía el diseño colocando un pulsador. Modifi-ca el juego para que al pulsar el botón del pulsador se haga invisible la nave con el fin de que los aste-roides no puedan tocarla. El nuevo sensor será el Digital2 del programa S4A.
18. Elabora un juego propio.
CS CL Pasado, presente y futuro
19. Leonardo da Vinci nunca imaginó que uno de sus diseños contribuiría a la exploración de Marte. El experto en robótica Mark Rosheim está diseñan-do un robot para la NASA basado en un invento de Leonardo que aparece en el Códice Huygens, uno de sus cuadernos de notas. El robot está pen-sado para mantener sistemas de la Estación Es-pacial Internacional, sobre todo cuando no haya humanos. En una futura exploración a Marte, la NASA podría dar órdenes a robots de este tipo y encargarles tareas de mantenimiento. Puesto que tendrían que trabajar solos, necesitan tanta des-treza manual como la de un mecánico humano.
Para conseguir la perfección de movimientos, Mark empleó cinco años en diseñar el robot de Leonardo, cuya dificultad máxima fue la recrea-ción exacta de las articulaciones de la primera mano humanoide, del hombro y del torso.
Desde entonces se han perfeccionado cada vez más este tipo de robots, llamados antrobots, que en un futuro no muy lejano trabajarán en Marte en unas condiciones que ningún humano podría soportar.
a) ¿Dónde trabajarán los antrobots?b) ¿Crees que se han utilizado ya robots en el es-
pacio?
Unidad 4. Electrónica y robótica

Elaborar un vídeo de presentación
técnicas de presentación
Deberás presentar el joystick y el juego que has programado al resto de tu clase mediante la plataforma Youtube de Google, donde, además de grabarte en ví-deo, deberás fingir ser el más famoso de los gamers.
¿Cómo usar Youtube? Youtube (www.youtube.com) es una página web usada por millones de usuarios que visualizan y comparten vídeos. Al tratarse de una aplica-ción de Google, cualquier usuario con un correo electrónico con dominio Google puede publicar en la página. Una persona sin cuenta de Youtube únicamente puede visualizar vídeos.
¿Qué es un gamer?El término gamer en la era tecnológica equivale a videojugador. Si se aplica en Youtube, se refiere a una persona que graba vídeos sobre cómo juega a distintos juegos de PC, realizando comentarios y superando al-gunas pruebas, retransmitiéndolos en directo o colgándolos posterior-mente. Algunos de los gamers de Youtube más famosos actualmente son WillyRex o ElRubius.
Los pasos a seguir para ser un gamer en Youtube son los siguientes:
1. Observar y aprender. Visualizar canales de gamers profesionales te ayudará a analizar los trucos, los comentarios y el formato que sigue cada jugador. Escoge aquello que más te gusta y adáptalo para incorpo-rarlo en tus jugadas.
2. Escoger una temática. Es importante centrarse en un género es-pecífico que se te dé bien, para así poder grabar tus partidas mientras disfrutas realizándolas.
Los gamers utilizan dos tipos de grabaciones:
Grabación tradicional. En el vídeo aparece únicamente el juego, mientras el gamer habla sobre la partida.
Grabación 2.0. En el vídeo se puede ver la partida de-sarrollada por el gamer y a él mismo en una ventana más pequeña, generalmente ubi-cada en una esquina.
82
3. Conseguir el material necesario para jugar. Dependiendo del juego y de la consola, necesitas complementos que también deberás conseguir. De ti depende saber hasta dónde quieres llegar.
4. Conseguir el material necesario para grabar. Disponer de una webcam o una cámara para grabarte, así como de un programa que permita grabar tus jugadas, es imprescindible.
Presenta tu proyectoUna vez te hayas informado sobre el funcionamiento de Youtube y sobre la forma de funcionar de un gamer, ha llegado el momento de actuar como uno de ellos. Debes seguir estos pasos:
1. Inicia sesión en Youtube con una cuenta de Google.
2. Una vez dentro, entra en Mi canal, situado en el lateral izquierdo de la pan-talla.
3. Configura los datos de tu canal en la ventana que se ha abierto. Escoge un seudónimo que creas que va a funcionar como gamer y dile a tu profesor o profesora cuál es.
4. Descárgate un programa que te permita capturar la pantalla del PC. Puedes usar, por ejemplo, Screencastomatic, ya que no es necesario instalarlo porque funciona online. Tienes la posibilidad de enviar la captura directamente a You-tube para editarla o puedes descargarte el archivo de vídeo. En la propia web tienes un vídeo tutorial sobre cómo realizarlo.
5. Usa las herramientas de Youtube que te sean útiles. Si clicas sobre el icono Subir, situado en la esquina superior derecha, aparecerá el editor de vídeos y podrás grabarte con la cámara web.
6. Graba el vídeo que publicarás: por un lado debes explicar cómo funciona el joystick, por otro explica la programación realizada en S4A y, finalmente, graba tu gameplay (‘sesión de juego’) donde se vea cuál es tu juego y cómo juegas.
7. Para publicar el vídeo en Youtube aprieta el icono Subir situado en la esqui-na superior derecha y arrastra el vídeo editado al centro de la pantalla.
8. Carga el vídeo en tu canal y comparte la url del vídeo con tu profesor o profesora.
Herramienta de edición de vídeoEn el mercado hay muchos programas de edición de vídeo que pueden serte útiles. Los hay de pago, aunque también libres, adaptados al sistema operativo que utilices como, por ejemplo, Avidemux, Cinelarra, Pitivi o Kino.
83
84
Unidad 4. Electrónica y robótica
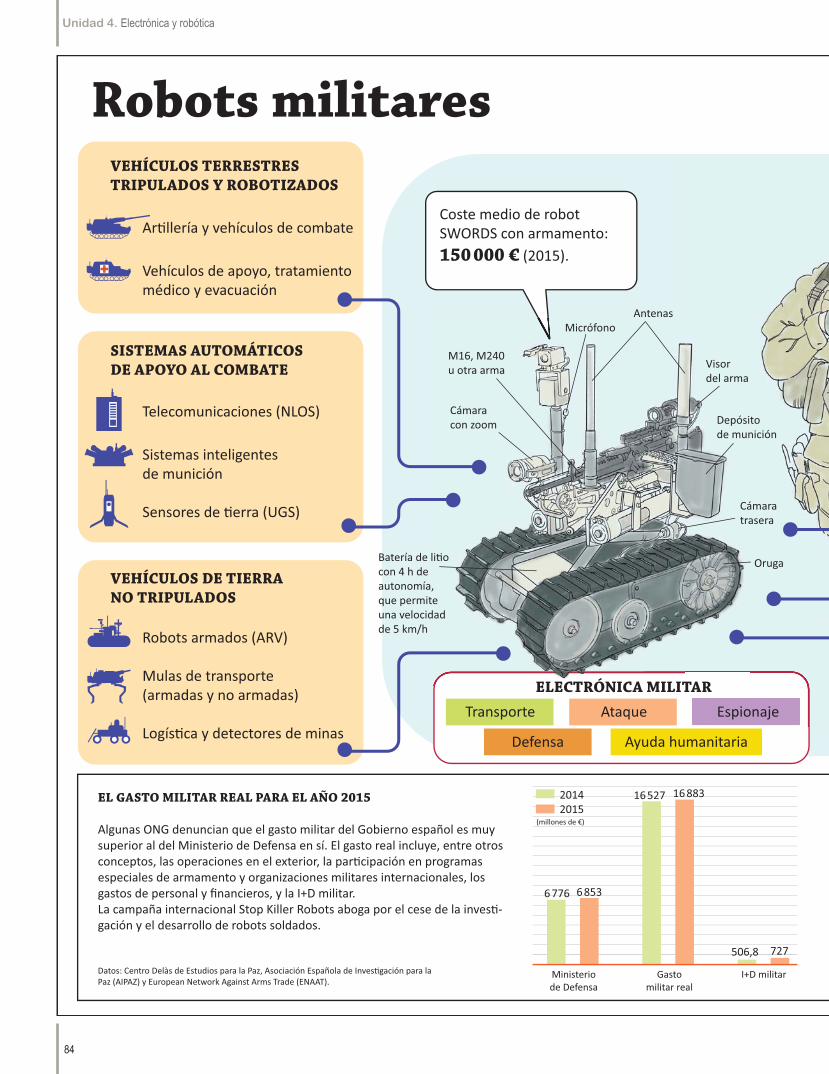
1 C3 Indica qué afirmaciones son ciertas y cuáles son falsas. Razona brevemente tus respuestas:
a) El gasto militar real de un país no se reduce al de su Ministerio de Defensa.
b) Según algunos estudios, el gas-to en I+D militar en España se incrementó de 2014 a 2015 en más de un 40%.
c) En 2015, en España no se desti-nan fondos de I+D militar para el desarrollo de robots bélicos.
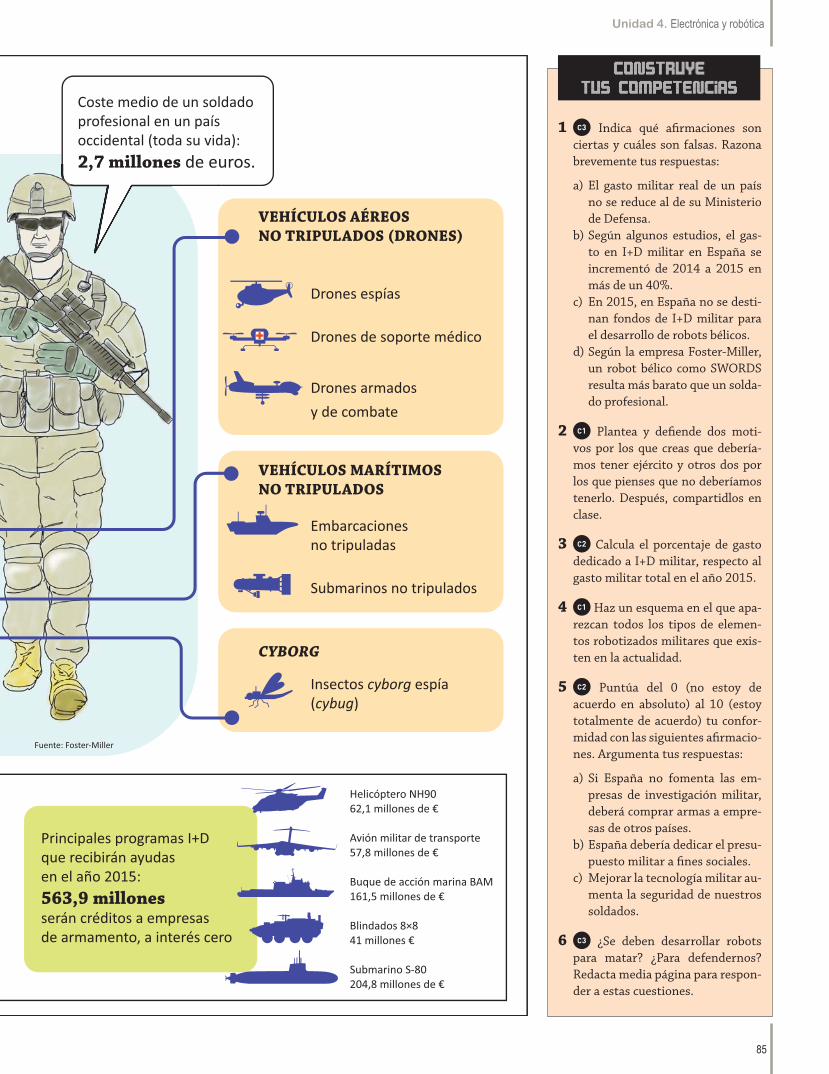
d) Según la empresa Foster-Miller, un robot bélico como SWORDS resulta más barato que un solda-do profesional.
2 C1 Plantea y defiende dos moti-vos por los que creas que debería-mos tener ejército y otros dos por los que pienses que no deberíamos tenerlo. Después, compartidlos en clase.
3 C2 Calcula el porcentaje de gasto dedicado a I+D militar, respecto al gasto militar total en el año 2015.
4 C1 Haz un esquema en el que apa-rezcan todos los tipos de elemen-tos robotizados militares que exis-ten en la actualidad.
5 C2 Puntúa del 0 (no estoy de acuerdo en absoluto) al 10 (estoy totalmente de acuerdo) tu confor-midad con las siguientes afirmacio-nes. Argumenta tus respuestas:
a) Si España no fomenta las em-presas de investigación militar, deberá comprar armas a empre-sas de otros países.
b) España debería dedicar el presu-puesto militar a fines sociales.
c) Mejorar la tecnología militar au-menta la seguridad de nuestros soldados.
6 C3 ¿Se deben desarrollar robots para matar? ¿Para defendernos? Redacta media página para respon-der a estas cuestiones.
85
CONSTRUYETUS COMPETENCIAS
Unidad 4. Electrónica y robótica