
EL PIC16F84 Y SU USO EN LAS COMUNICACIONES · Web viewEl Pin B7 se utiliza como entrada y salida....
148
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica. EL MICROCONTROLADOR PIC16F84 Y SU APLICACION EN LAS COMUNICACIONES TESIS PARA OBTENER EL GRADO DE INGENIERO EN COMUNICACIONES Y ELECTRONICA P R E S E N T A N ALVARADO CORONA RAFAEL BOLAÑOS RODRÍGUEZ BEATRIZ ANGELICA URZUA OSORIO DAGOBERTO DIRECTOR DE TESIS DR. PRIMITIVO REYES LOPEZ México, DF. Mayo del 2004 1
Transcript of EL PIC16F84 Y SU USO EN LAS COMUNICACIONES · Web viewEl Pin B7 se utiliza como entrada y salida....

INSTITUTO POLITÉCNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica.
EL MICROCONTROLADOR PIC16F84 Y SU APLICACION EN LAS COMUNICACIONES
TESIS PARA OBTENER EL GRADO DE
INGENIERO EN COMUNICACIONES Y ELECTRONICA
P R E S E N T A N
ALVARADO CORONA RAFAELBOLAÑOS RODRÍGUEZ BEATRIZ ANGELICA
URZUA OSORIO DAGOBERTO
DIRECTOR DE TESISDR. PRIMITIVO REYES LOPEZ
México, DF. Mayo del 2004
1

INSTITUTO POLITÉCNICO NACIONALESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
REPORTE TÉCNICO
QUE PARA OBTENER EL TITULO DEPOR LA OPCIÓN DE TITULACIÓNDEBERA(N) DESARROLLAR
INGENIERO EN COMUNICACIONES Y ELECTRONICASEMINARIO DE TITULACIÓN
C. ALVARADO CORONA RAFAELC. BOLAÑOS RODRÍGUEZ BEATRIZ ANGELICAC. URZUA OSORIO DAGOBERTO
“EL MICROCONTROLADOR PIC16F84 Y SU APLICACION EN LAS COMUNICACIONES”
OBJETIVO:
Mostrar el marco teórico sobre el amplio campo de aplicación de este microcontrolador y destacar sus posibilidades de uso en las Comunicaciones.
INTRODUCCIÓN JUSTIFICACIÓN1 CONCEPTOS BASICOS Y FUNDAMENTOS GENERALES2 LOS MICROCONTROLADORES Y EL PIC 16F84.3 PROGRAMADORES4 DESARROLLO DE CIRCUITOS REFERENCIAS BIBLIOGRAFICAS
2

INTRODUCCIÓN AL MICROCONTROLADOR
¿Qué es un microcontrolador?
Un microcontrolador es un dispositivo electrónico capaz de llevar a cabo procesos
lógicos. Estos procesos o acciones son programados en lenguaje ensamblador
por el usuario, y son introducidos en este a través de un programador. A lo largo
de esta tesis veremos todos los reglas y trucos de este lenguaje complicado por su
sencillez.
Un poco de historia
Inicialmente cuando no existían los microprocesadores las personas se ingeniaban
en diseñar sus circuitos electrónicos y los resultados estaban expresados en
diseños que implicaban muchos componentes electrónicos y cálculos
matemáticos. Un circuito lógico básico requería de muchos elementos electrónicos
basados en transistores, resistencias, etc, lo cual desembocaba en circuitos con
muchos ajustes y fallos; pero en el año 1971 apareció el primer microprocesador
el cual originó un cambio decisivo en las técnicas de diseño de la mayoría de los
equipos. Al principio se creía que el manejo de un microprocesador era para
aquellas personas con un coeficiente intelectual muy alto; por lo contrario con la
aparición de este circuito integrado todo sería mucho más fácil de entender y los
diseños electrónicos serian mucho más pequeños y simplificados. Entre los
microprocesadores mas conocidos tenemos el popular Z-80 y el 8085. Los
diseñadores de equipos electrónicos ahora tenían equipos que podían realizar
mayor cantidad de tareas en menos tiempo y su tamaño se redujo
considerablemente; sin embargo, después de cierto tiempo aparece una nueva
tecnología llamada microcontrolador que simplifica aun mas el diseño electrónico.
3
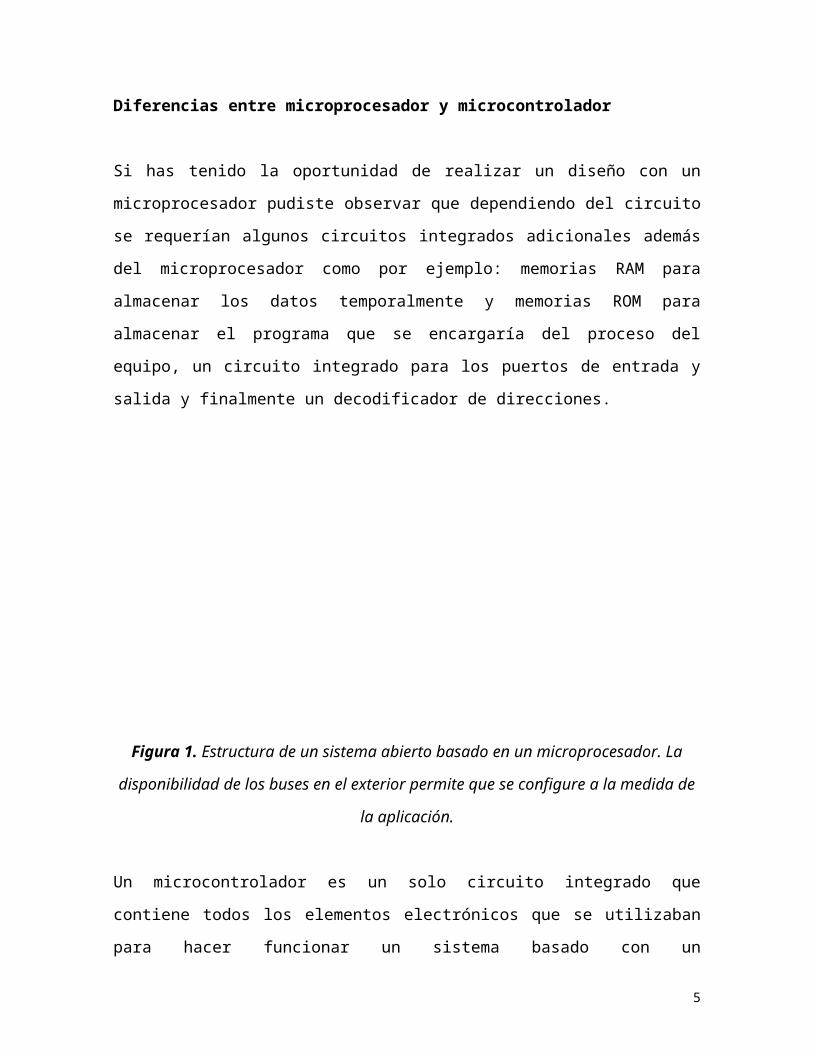
Diferencias entre microprocesador y microcontrolador
Si has tenido la oportunidad de realizar un diseño con un microprocesador pudiste
observar que dependiendo del circuito se requerían algunos circuitos integrados
adicionales además del microprocesador como por ejemplo: memorias RAM para
almacenar los datos temporalmente y memorias ROM para almacenar el programa
que se encargaría del proceso del equipo, un circuito integrado para los puertos de
entrada y salida y finalmente un decodificador de direcciones.
Figura 1. Estructura de un sistema abierto basado en un microprocesador. La
disponibilidad de los buses en el exterior permite que se configure a la medida de
la aplicación.
Un microcontrolador es un solo circuito integrado que contiene todos los
elementos electrónicos que se utilizaban para hacer funcionar un sistema basado
con un microprocesador; es decir; contiene en un solo integrado la Unidad de
Proceso, la memoria RAM, memoria ROM, puertos de entrada, salidas y otros
periféricos, con la consiguiente reducción de espacio.
El microcontrolador es en definitiva un circuito integrado que incluye todos los
componentes de un computador. Debido a su reducido tamaño es posible montar
4
el controlador en el propio dispositivo al que gobierna. En este caso el controlador
recibe el nombre de controlador empotrado (embedded controller).
Figura 2. El microcontrolador es un sistema cerrado. Todas las partes del
procesador están contenidas en su interior y sólo salen al exterior las líneas que
gobiernan los periféricos.
Ventajas de un microcontrolador frente a un microprocesador
Estas ventajas son reconocidas inmediatamente para aquellas personas que han
trabajado con los microprocesadores y después pasaron a trabajar con los
microcontroladores. Estas son las diferencias más importantes:
Por ejemplo la configuración mínima básica de un microprocesador estaba
constituida por un Micro de 40 Pines, Una memoria RAM de 28 Pines, una
memoria ROM de 28 Pines y un decodificador de direcciones de 18 pines; pero un
microcontrolador incluye todo estos elementos en un solo Circuito Integrado por lo
que implica una gran ventaja en varios factores: En el circuito impreso por su
amplia simplificación de circuitería, el costo para un sistema basado en
microcontrolador es mucho menor y, lo mejor de todo, el tiempo de desarrollo de
su proyecto electrónico se disminuye considerablemente.
5

Los microcontroladores hoy día
Los microcontroladores están conquistando el mundo. Están presentes en nuestro
trabajo, en nuestra casa y en nuestra vida, en general. Se pueden encontrar
controlando el funcionamiento de los ratones y teclados de los computadores, en
los teléfonos, en los hornos microondas y los televisores de nuestro hogar. Pero la
invasión acaba de comenzar y el nacimiento del siglo XXI será testigo de la
conquista masiva de estos diminutos computadores, que gobernarán la mayor
parte de los aparatos que fabricaremos y usamos los humanos.
Cada vez existen más productos que incorporan un microcontrolador con el fin de
aumentar sustancialmente sus prestaciones, reducir su tamaño y coste, mejorar su
fiabilidad y disminuir el consumo.
Algunos fabricantes de microcontroladores superan el millón de unidades de un
modelo determinado producidas en una semana. Este dato puede dar una idea de
la masiva utilización de estos componentes.
Los microcontroladores están siendo empleados en multitud de sistemas
presentes en nuestra vida diaria, como pueden ser juguetes, horno microondas,
frigoríficos, televisores, computadoras, impresoras, módems, el sistema de
arranque de nuestro coche, etc. Y otras aplicaciones con las que seguramente no
estaremos tan familiarizados como instrumentación electrónica, control de
sistemas en una nave espacial, etc.
Una aplicación típica podría emplear varios microcontroladores para controlar
pequeñas partes del sistema. Estos pequeños controladores podrían comunicarse
entre ellos y con un procesador central, probablemente más potente, para
compartir la información y coordinar sus acciones, como, de hecho, ocurre ya
habitualmente en cualquier PC.
6

Objetivo.
El objetivo del presente trabajo es proporcionar un panorama amplio para conocer
estos dispositivos y en particular del PIC16F84 que por sus relevantes
características, bajo costo y facilidad de programación nos brinda la oportunidad
de crear un sinfín de aplicaciones cuyo único límite es la imaginación. Además se
pretende dar un enfoque práctico, mostrando sus aplicaciones en diferentes áreas
y particularmente en el área de Comunicaciones, donde se mostrará el uso del
microcontrolador PIC16F84 para la modulación por ancho de pulso (PWM).
Cabe hacer la aclaración que el PIC16F84 requiere de algunos mínimos
componentes externos dependiendo de la aplicación que se pretenda darle. Como
ejemplo podemos mencionar el uso de un cristal de cuarzo y capacitores o
resistencias dependiendo del tipo de oscilador que se elija para hacerlo operar.
En cuanto a las condiciones actuales se mencionan también algunos otros
microcontroladores de otras empresas como los COP de NATIONAL, AVR´s de
ATMEL, la serie 8031 de INTEL, etc. Para así comprarlos con el PIC16F84 de
MICROCHIP y darnos cuenta de las superiores cualidades y características con
respecto a sus competidores mas cercanos. Se cree conveniente que para que se
pueda conocer más a fondo este dispositivo y trabajar con él primero debemos
definir que es y para que sirve un microcontrolador, sus características generales,
un amplio panorama de aplicaciones y mencionar el caso particular del PIC16F84
con los bloques que lo integran basándose en la familia 16X84 para así saber que
es la memoria de datos, la memoria de programas, el perro guardián, el registro
STATUS, etc, se aborda también el tema del diseño del conjunto de instrucciones
y estos temas son presentados en el capitulo II.
En el capitulo III y habiendo descrito los recursos con que cuenta el PIC16F84 en
el capitulo I, son presentadas las 35 instrucciones del set RISC de esta familia,
dando algunos ejemplo de uso en ciertos casos. Se hablará también de cómo
7
programar estos dispositivos y varios modelos de programadores existentes, así
mismo se hablará del software empleado en su programación y de otros paquetes
extras que facilitan el trabajo.
En el capitulo IV se dan ejemplos de prácticos sobre circuitos reales de diferentes
ramas de la ingeniería y uno de sus múltiples usos en el área de las
Comunicaciones que es la modulación por ancho de pulso o PWM.
En el capitulo V se presentan las conclusiones derivadas del análisis del
microcontrolador PIC16F84 y sus aplicaciones en el área de las Comunicaciones,
se incluyen hojas de especificaciones y costos de estos microcontroladores.
8

Planteamiento del Problema.
Debido a los grandes avances tecnológicos, nosotros como ingenieros
tenemos una gran participación en el desarrollo de nuevas tecnologías, esta es
una razón por la cual estamos proponiendo que una solución de bajo costo, la cual
sería el uso del microcontrolador, cabe señalar que este se debe seleccionar de
acuerdo a la aplicación que vallamos a desarrollar ya que se puede utilizar en un
sin fin de aplicaciones, esto es de vital importancia pues existen
microcontroladores de mucha capacidad y de poca capacidad por lo tanto, algunos
son muy económicos y otros son un poco mas caro.
Como fue mencionado anteriormente existen otros modelos de
microcontroladores diferentes al PIC16F84, tal es el caso por ejemplo de los COP
de NATIONAL o los AVR´s de ATMEL que poseen algunos recursos similares al
PIC16F84 de microchip, pero que por su alto costo y dificultad de programación,
así como el tipo de tecnología empleada en su construcción, hacen decidirse por
una opción más económica y con mejores prestaciones como lo es el PIC16F84.
9
** INDICE **INTRODUCCION
CAPITULO 1.- CONCEPTOS BASICOS Y FUNDAMENTOS GENERALES 011.1.- LA COMPUTADORA 021.2.- EL PROCESADOR 041.3.- LAS INSTRUCCIONES 071.4.- DESARROLLO DE LA COMPUTACION 091.5.- CLASIFICACION DE LAS COMPUTADORAS 13
CAPITULO 2.- LOS MICROCONTROLADORES Y EL PIC 16F84. 152.1.- DEFINICIONES Y APLICACIONES DE LOS MICROCONTROLADORES. 152.2.- MICROCONTROLADORES MAS COMUNES. 172.3.- COMPETIDORES DIRECTOS DEL PIC Y SUS PRINCIPALES RECURSOS. 182.4.- DESCRIPCION DE LOS PINES. 192.5.- DESCRIPCION INTERNA. 232.6.- TIPOS DE ARQUITECTURA DEL CONJUNTO DE INSTRUCCIONES. 352.7.- CONSIDERACIONES MAS COMUNES PARA EL DISEÑO DE LA ARQUITECTURA
DEL CONJUNTO DE INSTRUCCIONES.36
2.8.- CLASIFICACION DE ISAs CON REGISTRO DE PROPOSITO GENERAL. 392.9.- REDUCED INSTRUCTION SET COMPUTER (RISC). 402.10.- CONSIDERACIONES PARA EL DISEÑO DEL CONJUNTO DE INSTRUCCIONES RISC. 432.11.- DISEÑO DEL CONJUNTO DE INSTRUCCIONES 44
CAPITULO 3.- PROGRAMADORES 57
CAPITULO 4.- DESARROLLO DE CIRCUITOS 704.1.- DESARROLLO DE UN DETECTOR DE RUIDO DE ALTA FRECUENCIA DE BAJO
COSTO BASADO EN EL MICROCONTROLADOR PIC16F8470
4.2.- DESARROLLO DE UN CIRCUITO PARA PWM 774.3.- PROYECTOS CON EL PIC16F84 82
BIBLIOGRAFIA 96
10

CAPITULO I.- CONCEPTOS BASICOS Y FUNDAMENTOS GENERALES
Introducción.
En el campo de la electrónica existen diversos dispositivos programables, tal
es el caso de los microcontroladores que están ocupando un lugar de privilegio
dentro de la industria electrónica. En particular los microcontroladores de la
empresa Microchip, en los cuales se puede implementar fácilmente una gran
variedad de programas con un set reducido de instrucciones, y estos dispositivos
son conocidos como PIC.
Fundamentos de los procesadores.
A través de la historia de la humanidad, los cálculos principalmente se han
realizado con nuestro cerebro. Conforme la civilización ha avanzado se han
desarrollado herramientas de cálculo que han ayudado a el cómputo manual. En
un principio se usaron los dedos, piedras y se tallaron maderas para realizar
conteos. Posteriormente apareció el ábaco y la regla de cálculo.
A medida que el tamaño y complejidad de los cálculos aumentaban,
aparecieron dos limitantes en cuanto al cálculo manual:
La velocidad con que un humano realiza los cálculos.
La vulnerabilidad a cometer errores, por causa de distracción, fatiga,
etc., factores que no afectan a las máquinas.
En consecuencia aparecieron las primeras máquinas de cálculo automático.
11

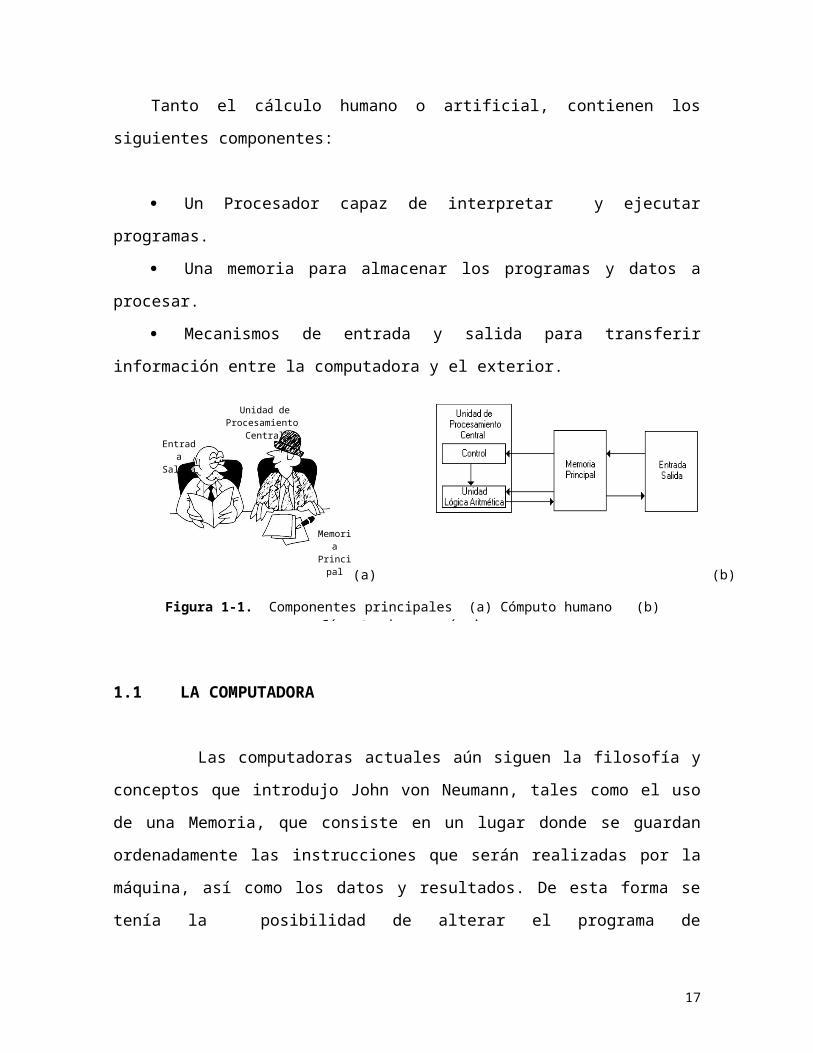
Tanto el cálculo humano o artificial, contienen los siguientes componentes:
Un Procesador capaz de interpretar y ejecutar programas.
Una memoria para almacenar los programas y datos a procesar.
Mecanismos de entrada y salida para transferir información entre la
computadora y el exterior.
1.1 LA COMPUTADORA
Las computadoras actuales aún siguen la filosofía y conceptos que
introdujo John von Neumann, tales como el uso de una Memoria, que consiste en
un lugar donde se guardan ordenadamente las instrucciones que serán realizadas
por la máquina, así como los datos y resultados. De esta forma se tenía la
posibilidad de alterar el programa de instrucciones, es por esto que se denominan
máquinas de programa almacenado. Von Neumann también introdujo el uso del
sistema binario.
La máquina programada de von Neumann se compone de bloques
electrónicos digitales, que reciben, guardan y procesan información binaria,
comunicándose entre ellos por líneas digitales, conocidas como buses.
12
Unidad de Procesamiento
Central
Memoria
Principal
Entrada
Salida
Figura 1-1. Componentes principales (a) Cómputo humano (b) Cómputo de una máquina.
(a) (b)
La Unidad de Control y el Camino de Datos conforman la Unidad de Procesamiento Central, también llamado Procesador, la cual se encarga de
recibir ordenadamente las instrucciones desde la Memoria Principal para
interpretarlas y generar las señales de control, que se aplican sobre los
componentes del sistema para llevar a cabo las instrucciones.
El Generador de pulsos de reloj, se encarga de sincronizar las
operaciones que se llevan a cabo en los componentes que intervienen en el
manejo de los datos. La frecuencia del generador depende del diseño y tecnología
de la computadora y determina la velocidad de procesamiento del mismo.
La Memoria Principal almacena, tanto los datos como el conjunto
ordenado de instrucciones que al ser ejecutadas, proporcionan los resultados
esperados. Al conjunto ordenado de instrucciones se conoce como Programa. La
máquina tiene la capacidad de romper la secuencia ordenada según los resultados
parciales que se van obteniendo.
La encargada de adaptar el formato de la información entre la máquina y
los periféricos es la Unidad de Entrada y salida.
13
Figura 1-2. Arquitectura Von Neumann.
1.2 EL PROCESADOR
Un procesador de propósito general es un autómata de estados finitos
que ejecuta instrucciones almacenadas en una memoria. El estado del sistema
esta definido por los valores almacenados en las localidades de memoria junto
con los valores almacenados en ciertos registros del procesador.
La evolución de las computadoras se basa en los procesadores, que han
llegado a ser mucho más poderosos y han desplazado ampliamente el uso de
supercomputadoras en las empresas e industria.
Los procesadores también conocidos como CPU son usados en estaciones
de trabajo, servidores y dispositivos periféricos como impresoras y controladores
de disco. También son usados en muchas aplicaciones, incluyendo control y
monitoreo de funciones.
Funciones que realiza
La función primaria del procesador es ejecutar secuencias de instrucciones o
programas, almacenados en una memoria principal.
El procesador transfiere las instrucciones y los datos de entrada, de la
memoria principal a sus registros. Ejecuta las instrucciones en la secuencia
almacenada, excepto cuando ésta es alterada por una instrucción de salto.
Transfiere los datos de salida de sus registros a la memoria principal.
El manejo eficiente del flujo de instrucciones y datos es una tarea básica que
debe desarrollar el procesador.
14
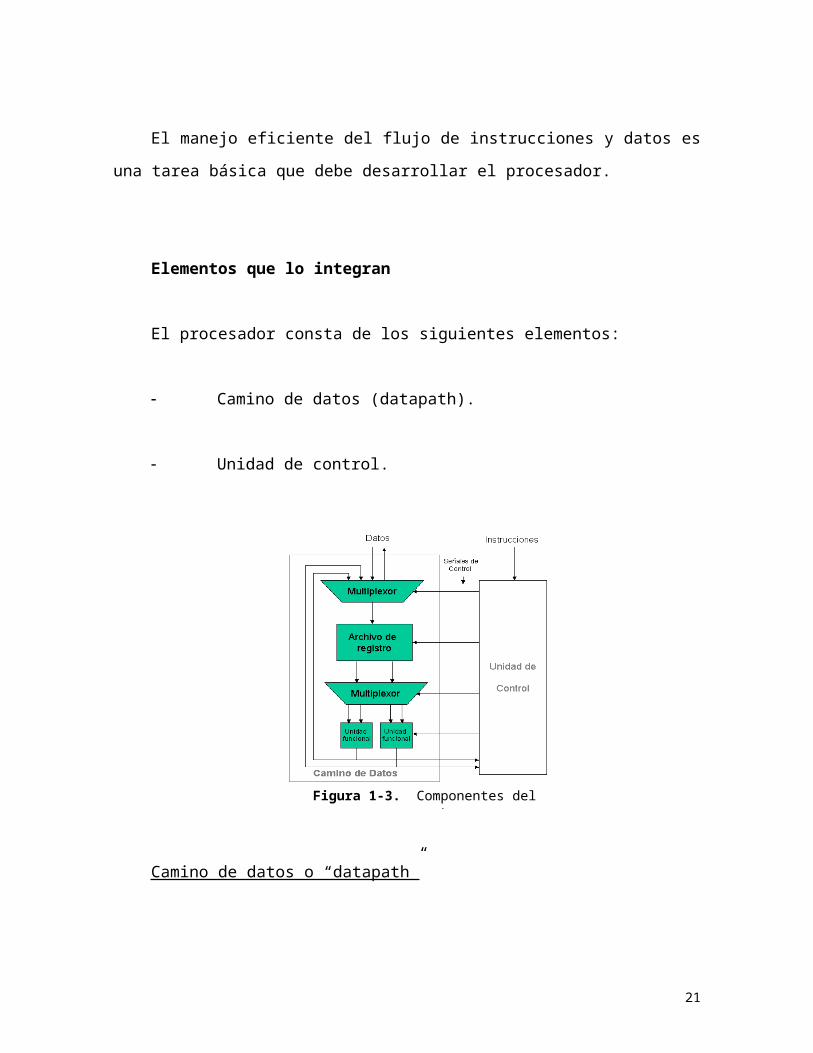
Elementos que lo integran
El procesador consta de los siguientes elementos:
Camino de datos (datapath).
Unidad de control.
Camino de datos o “datapath”
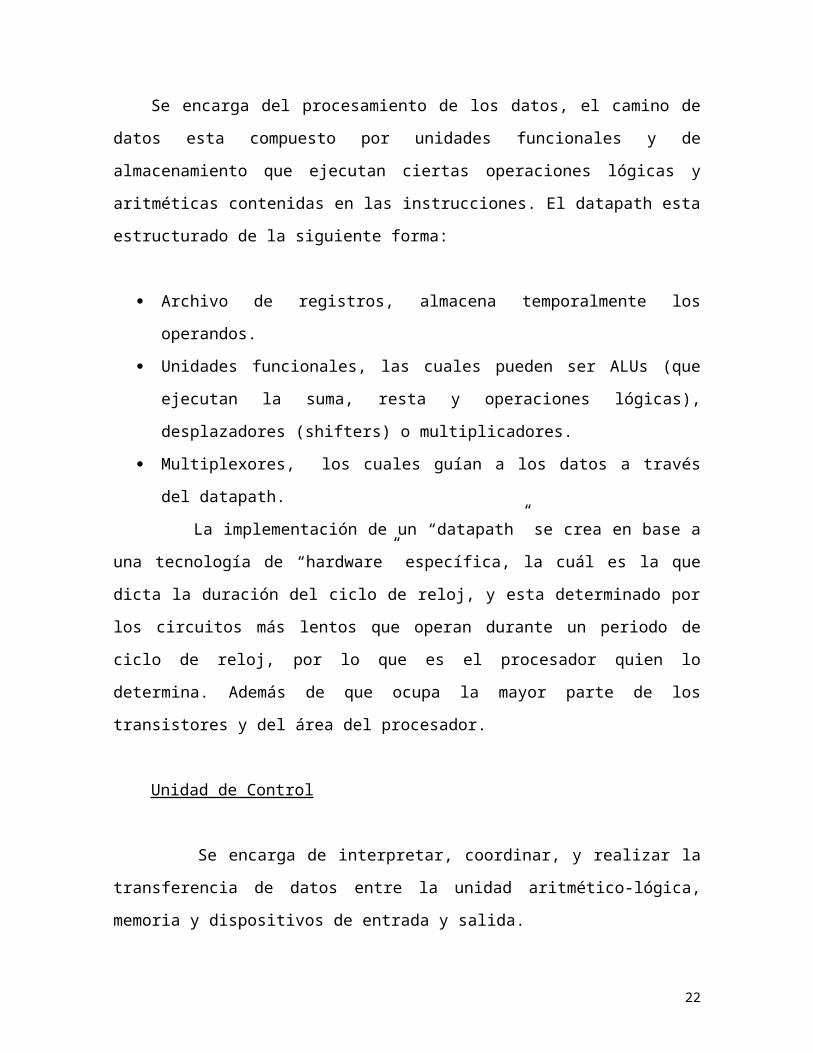
Se encarga del procesamiento de los datos, el camino de datos esta
compuesto por unidades funcionales y de almacenamiento que ejecutan ciertas
operaciones lógicas y aritméticas contenidas en las instrucciones. El datapath esta
estructurado de la siguiente forma:
Archivo de registros, almacena temporalmente los operandos.
Unidades funcionales, las cuales pueden ser ALUs (que ejecutan la suma,
resta y operaciones lógicas), desplazadores (shifters) o multiplicadores.
Multiplexores, los cuales guían a los datos a través del datapath.
15
Figura 1-3. Componentes del procesador.

La implementación de un “datapath” se crea en base a una tecnología de
“hardware” específica, la cuál es la que dicta la duración del ciclo de reloj, y esta
determinado por los circuitos más lentos que operan durante un periodo de ciclo
de reloj, por lo que es el procesador quien lo determina. Además de que ocupa la
mayor parte de los transistores y del área del procesador.
Unidad de Control
Se encarga de interpretar, coordinar, y realizar la transferencia de datos
entre la unidad aritmético-lógica, memoria y dispositivos de entrada y salida.
Analiza e interpreta los bits de los campos que componen a una instrucción,
posteriormente genera las señales de control adecuadas para especificar al
Camino de datos la operación que debe realizar, los operandos de entrada y el
lugar donde debe guardar el resultado. Además determina la dirección de la
siguiente instrucción a ejecutar.
Existen dos métodos para el diseño de la unidad de control: Control
cableado y microprogramado.
Control cableado. Se basa en un circuito lógico secuencial o máquina de
estado finito, que genera secuencias específicas de señales de control en
respuesta a instrucciones externas. Su objetivo es minimizar el número de
componentes usados y maximizar la velocidad de operación. Una vez construida
la unidad de control, la única manera de implementar cambios es rediseñando
totalmente la unidad, es por esta característica que se conoce como Cableado o
Hardwired.
Microprogramación. Se construye en torno a una unidad de
almacenamiento llamada memoria de control, todas las señales de control se
almacenan en un formato similar a un programa. La memoria de control almacena
16
un conjunto de microprogramas diseñadas para implementar o emular el
funcionamiento de un conjunto de instrucciones en particular. Cada instrucción
origina la búsqueda del microprograma correspondiente. La extracción de la
información contenida en los microprogramas es muy similar a la búsqueda y
ejecución de un programa almacenado en memoria principal. Este tipo de control
es más sistemático al organizar las señales de control en palabras con formato
(microinstrucciones), los cambios en el diseño se pueden realizar fácilmente al
alterar el contenido de la memoria de control. El inconveniente es que son muy
costosas y tienden a ser lentas ya que se debe emplear tiempo extra en la
búsqueda de la microinstrucción dentro de la memoria de control.
1.3 LAS INSTRUCCIONES
Dependiendo de la estructura de la computadora, se tiene un tamaño de
bits en el que se trabajan las instrucciones. Este tamaño se conoce como palabra y suele ser de 8, 16, 32 ó 64 bits. Las instrucciones como los datos pueden ser de
una o varias palabras.
Una instrucción especifica sus parámetros por medio de campos, los
cuales suelen ser: Código de operación (codifica el tipo de operación lógica o
aritmética que realizará la instrucción), Operando fuente y destino, entre otros.
17
CÓDIGOOP OPERANDO
1OPERANDO
2RESULTADO
Figura 1-4. Unidad de control (a) Cableado (hardwired) (b) Microprogramado.
(a) (b)

Tanto las unidades de control cableadas como microprogramadas son
estructuradas como instrucciones o microinstrucciones pipelines como una
manera de incrementar la ejecución. El Pipeline es un método de bajo costo para
aumentar el rendimiento del procesador al descomponer su operación en una
secuencia de pasos relativamente independientes. Los procesadores actuales
usan el pipeline para incrementar su porcentaje efectivo de instrucciones
ejecutadas.
Etapas para la ejecución de una instrucción
Las instrucciones pueden descomponerse por ejemplo en cinco etapas
básicas, que son.
1° Etapa. Búsqueda de instrucción
Se localiza el código binario de la instrucción en la Memoria Principal. El
contador de Programa (PC), se encarga de depositar en el bus de direcciones la
dirección de la instrucción a ejecutar. Una vez decodificada la dirección en la
memoria, se lee la posición correspondiente y su contenido se transfiere por el
bus de datos e instrucciones a la Unidad de Control.
2° Etapa. Búsqueda del registro/Decodificación de la instrucción
La unidad de control interpreta el código binario de la instrucción que se ha
recibido de la Memoria principal y accede al archivo de registros para leerlos.
3° Etapa. Ejecución
La unidad de control genera las señales precisas para que el “datapath”
realice la operación correspondiente a la instrucción actual.
18
Figura 1-5. Campos de una instrucción.

4° Etapa. Acceso a memoria
Es realizada únicamente por instrucciones de carga, almacenamiento, saltos
y bifurcaciones. El acceso a la memoria esta determinada por el tipo de
instrucción.
5° Etapa. Post-escritura (escritura del resultado)
El resultado obtenido en la etapa de ejecución de la instrucción se guarda en
el registro destino.
1.4 DESARROLLO DE LA COMPUTACIÓN
El desarrollo de la tecnología, en especial la relacionada con la
electrónica, ha afectado fuertemente la evolución de la organización de las
computadoras, por lo que se identifican cuatro etapas:
1° Etapa.
Es la época inicial o nacimiento de la computadora, y esta marcada por la
estructura propuesta por Von Neumann.
19
Figura 1-6. Arquitectura simplificada propuesta por Von Neumann.

La mayor actividad se realiza en la Unidad de Control y la Memoria Principal.
La unidad de control envía a la memoria la dirección de la instrucción, recibe su
código, lo interpreta y en fase de ejecución, selecciona la operación en la ALU,
busca los operandos y almacena los resultados. Es un ir y venir de datos e
instrucciones entre la memoria y la unidad de control. Así también las entradas y
salidas que proporcionan y reciben datos.
La tecnología usada en la implementación de esta estructura consistió en
válvulas de vacío. La velocidad de respuesta entre ambos bloques era similar, ya
que ambos estaban construidos con dichos dispositivos. En la programación de
las computadoras se usaba el lenguaje máquina binario.
2° Etapa
Es la época de los circuitos de pequeña y mediana escala de integración
(SSI y MSI), estos son usados en la construcción del procesador, pero no en la
Memoria, la cual se implementaba con tecnologías como núcleos de ferrita, cuyos
tiempos de acceso eran muy elevados, esto propicio una diferencia considerable
entre las tecnologías utilizadas para la construcción de esos dispositivos.
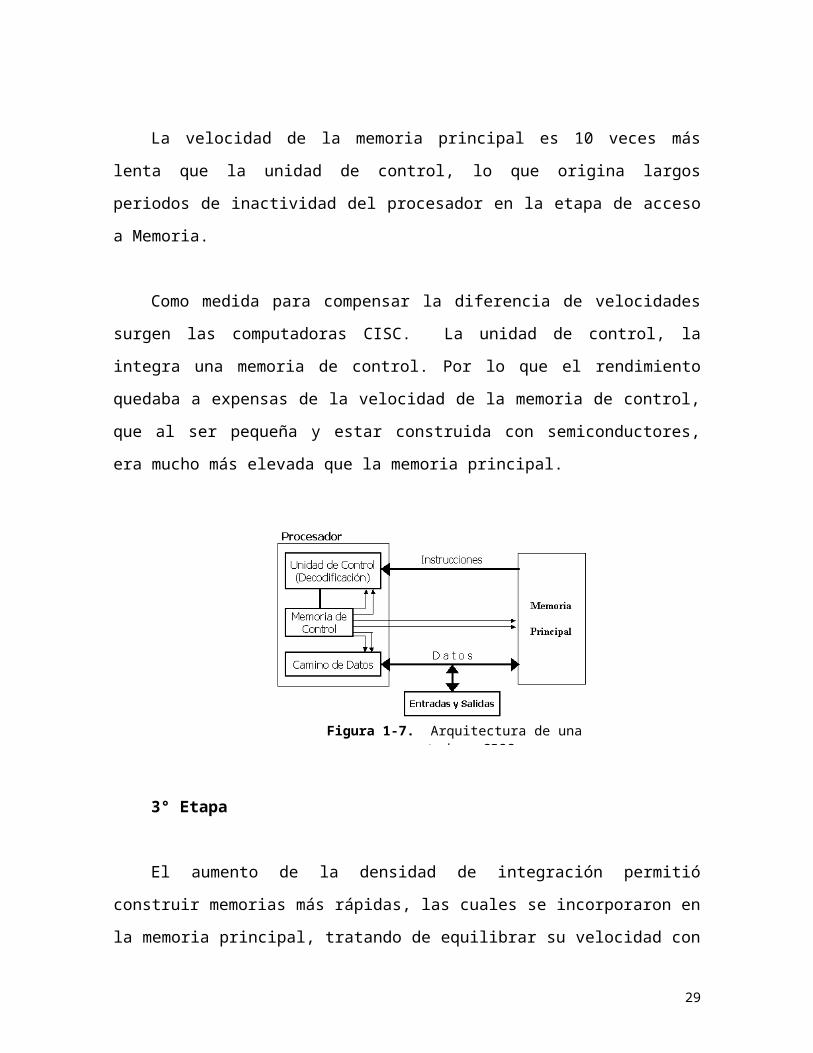
La velocidad de la memoria principal es 10 veces más lenta que la unidad de
control, lo que origina largos periodos de inactividad del procesador en la etapa de
acceso a Memoria.
Como medida para compensar la diferencia de velocidades surgen las
computadoras CISC. La unidad de control, la integra una memoria de control. Por
lo que el rendimiento quedaba a expensas de la velocidad de la memoria de
control, que al ser pequeña y estar construida con semiconductores, era mucho
más elevada que la memoria principal.
20
3° Etapa
El aumento de la densidad de integración permitió construir memorias más
rápidas, las cuales se incorporaron en la memoria principal, tratando de equilibrar
su velocidad con la del procesador. En está etapa aparece la memoria caché, la
cuál se intercala entre la memoria principal y unidad de control, esta contiene la
información más utilizada por el procesador. La memoria caché alcanza
velocidades de 5 a 10 veces más que la memoria principal, su capacidad es
pequeña pero su efectividad consiste en que contenga las instrucciones más
solicitadas por el procesador.
21
Figura 1-8. Arquitectura que utiliza memoria caché.
Figura 1-7. Arquitectura de una computadora CISC.
Las computadoras de memoria caché, al momento de decodificar
instrucciones complejas, hacen que el procesador se tarde más en realizar la
operación que en acceder a la memoria, es por esto que el interés en las
computadoras CISC ha ido disminuyendo.
4° Etapa
Se han realizado modificaciones en cuanto al diseño en la organización de
las computadoras, con mira al mejoramiento de la velocidad del procesador y el
equilibrio con la memoria caché, algunas de estas modificaciones son las
siguientes:
1.- Eliminación del microcódigo. Las instrucciones se vuelven sencillas, por lo
que desaparece la memoria de control.
2.- Reducción del tiempo de ciclo de máquina. Como consecuencia de la
simplificación de las instrucciones.
3.- Interpretación directa por el hardware de las instrucciones y ejecución de las
mismas en un ciclo de máquina.
4.- Ampliación de la caché para contener datos e instrucciones.
Los procesadores actuales dan gran importancia a la memoria caché, la
cual está dedicada exclusivamente a contener instrucciones y los datos más
usados. Se han establecido jerarquías entre distintos tamaños de caché,
existiendo varios niveles con distintas velocidades y capacidades.
También con estos criterios se realza el uso de las computadoras de
conjunto de instrucciones RISC.
22
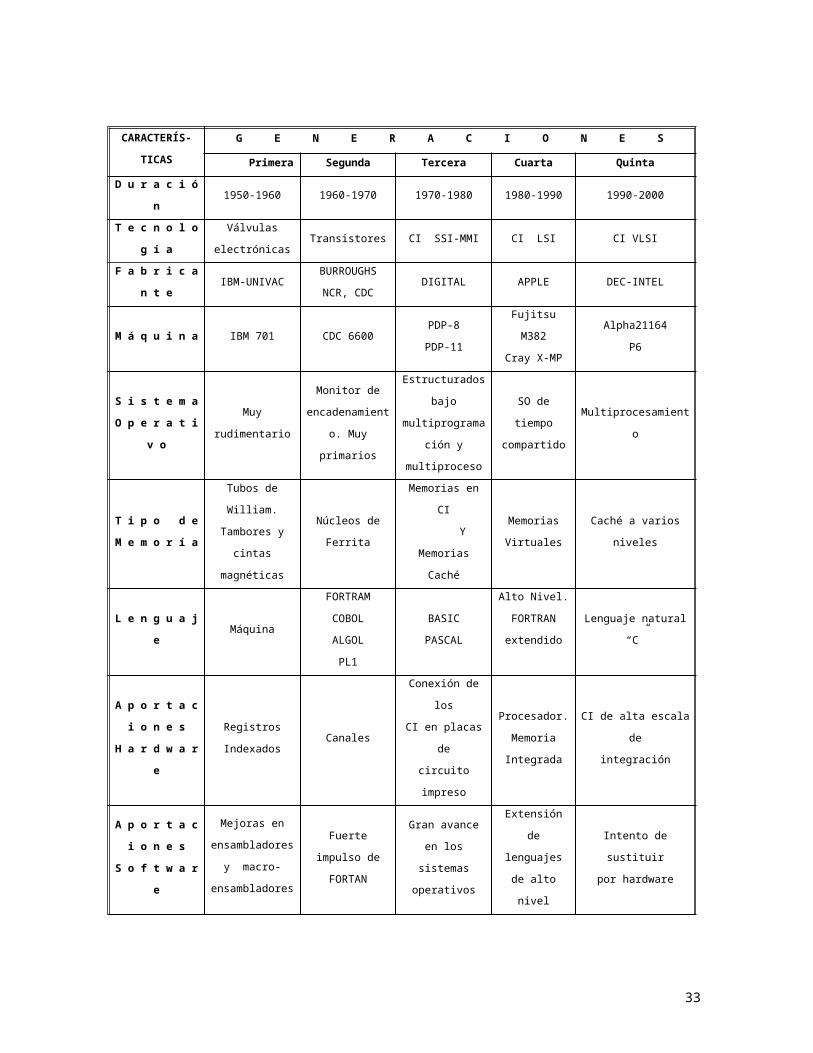
1.5 CLASIFICACIÓN DE LAS COMPUTADORAS
Por el tipo y categorías de computadoras que se han fabricado suelen
clasificarse en cinco generaciones, las cuáles tienen aproximadamente una
duración de una década y que se caracterizan por un conjunto de parámetros, los
cuales podemos visualizarlos en la siguiente tabla.
23
Figura 1-9. Arquitectura básica de computadoras RISC.

CARACTERÍS-TICAS
G E N E R A C I O N E S
Primera Segunda Tercera Cuarta Quinta
D u r a c i ó n 1950-1960 1960-1970 1970-1980 1980-1990 1990-2000
T e c n o l o g í aVálvulas
electrónicasTransistores CI SSI-MMI CI LSI CI VLSI
F a b r i c a n t e IBM-UNIVACBURROUGHS
NCR, CDCDIGITAL APPLE DEC-INTEL
M á q u i n a IBM 701 CDC 6600PDP-8
PDP-11
Fujitsu
M382
Cray X-MP
Alpha21164
P6
S i s t e m aO p e r a t i v o
Muy rudimentario
Monitor de
encadenamiento.
Muy primarios
Estructurados
bajo
multiprogramació
n y multiproceso
SO de
tiempo
compartido
Multiprocesamiento
T i p o d eM e m o r í a
Tubos de William.
Tambores y
cintas magnéticas
Núcleos de
Ferrita
Memorias en CI
Y
Memorias Caché
Memorias
VirtualesCaché a varios niveles
L e n g u a j e Máquina
FORTRAM
COBOL
ALGOL
PL1
BASIC
PASCAL
Alto Nivel.
FORTRAN
extendido
Lenguaje natural
“C”
A p o r t a c i o n e s
H a r d w a r e
Registros
IndexadosCanales
Conexión de los
CI en placas de
circuito impreso
Procesador.
Memoria
Integrada
CI de alta escala de
integración
A p o r t a c i o n e s
S o f t w a r e
Mejoras en
ensambladores y
macro-
ensambladores
Fuerte impulso de
FORTAN
Gran avance en
los sistemas
operativos
Extensión de
lenguajes de
alto nivel
Intento de sustituir
por hardware
P r o d u c t o ComputadoraComputadora
comercialMini computadora
Micro
computadoraMultiprocesador
24
Tabla 1-1. Características principales de las computadoras es las distintas generaciones.

CAPITULO 2.- LOS MICROCONTROLADORES Y EL PIC 16F84
Introducción.
Como fue mencionado anteriormente existen otros modelos de
microcontroladores diferentes al PIC16F84, tal es el caso por ejemplo de los COP
de NATIONAL o los AVR´s de ATMEL que poseen algunos recursos similares al
PIC16F84 de microchip, pero que por su alto costo y dificultad de programación,
así como el tipo de tecnología empleada en su construcción, hacen decidirse por
una opción más económica y con mejores prestaciones como lo es el PIC16F84. A
continuación se definirá el concepto de microcontrolador, sus aplicaciones en la
vida cotidiana y en la industria y se presentaran los competidores más directos y
conocidos del PIC16F84, para así mostrar sus características principales, sus
recursos, su tecnología empleada, etc. Se presentaran también todos los recursos,
características y tecnología del PIC de la empresa MICROCHIP.
2.1.- Definición y aplicaciones de los microcontroladores.
El microcontrolador es un circuito integrado o chip que incluye es su interior
las tres unidades funcionales de una computadora: CPU, memoria y unidades de
E/S, es decir, se trata de un computador monopastilla, aunque de limitadas
prestaciones y que normalmente se dedica a resolver una tarea específica. Es
más pequeño que una caja de cerillos y, en ocasiones, cuesta menos, por lo que
suele ir incrustado en el dispositivo que controla.
Un microcontrolador es un microprocesador optimizado para ser utilizado
para controlar equipos electrónicos. Los microcontroladores representan la
inmensa mayoría de los chips de computadoras vendidos, sobre un 50% son
controladores "simples" y otro son DSPs más especializados. En el hogar pueden
existir en los electrodomésticos entre una y dos docenas de microcontroladores.
25

Pueden encontrarse en casi cualquier dispositivo eléctrico como lavadoras, horno
de microondas, teléfonos, etc.
Un microcontrolador difiere de una CPU normal, debido a que es más fácil
convertirla en un ordenador en funcionamiento, con un mínimo de chips externos
de apoyo. La idea es que el chip se coloque en el dispositivo, enganchado a la
fuente de energía y de información que necesite. Un microprocesador tradicional
permite hacer esto, ya que espera que todas estas tareas sean manejadas por
otros chips.
Por ejemplo, un microcontrolador típico tendrá un generador de reloj
integrado y una pequeña cantidad de memoria RAM y ROM /EPROM/ EEPROM,
significando que para hacerlo funcionar, todo lo que se necesita son unos pocos
programas de control y un cristal de sincronización. Los microcontroladores
disponen generalmente también de una gran variedad de dispositivos de entrada /
salida, como convertidores de analógico a digital, temporizadores, UARTs y buses
de interfaz serie especializados, como I2C y CAN. Frecuentemente, estos
dispositivos integrados pueden ser controlados por instrucciones de procesadores
especializados. Los modernos microcontroladores frecuentemente incluyen un
lenguaje de programación integrado, como el BASIC, ENSAMBLADOR, NIPLE,
etc, que se utilizan bastante con este propósito.
Los microcontroladores negocian la velocidad y la flexibilidad para facilitar su
uso. Debido a que se utiliza bastante sitio en el chip para incluir funcionalidad,
como los dispositivo de E/S ( entrada / salida) o la memoria que incluye el
microcontrolador, se ha de prescindir de cualquier otra circuitería.
26

2.2.- Microcontroladores más comunes.Los microcontroladores más comunes en uso son:
AVR
Hitachi
H8
Holtek
HT8
Intel
8-bit
8XC42
MCS51
8xC251
16-bit
MCS96
MXS296
National Semiconductor
COP8
Microchip
12-bit instruction PIC
14-bit instruction PIC
PIC16F84
16-bit instruction PIC
Motorola
8-bit
68HC05
68HC08
68HC11
16 Bit
Atmel
68HC12
68HC16
32-bit
683xx
NEC
78K
ST
ST 62
ST 7
Texas Instruments
TMS370
Zilog
Z8
Z86E02
Genérico
27

Algunas arquitecturas de microcontrolador están disponibles por tal cantidad
de vendedores y en tantas variedades, que podrían tener su propia categoría.
Entre ellos encontramos, principalmente, las variantes de 8051 y Z80.
2.3.- Competidores directos del PIC y sus principales recursos.
Ahora se mostrarán 3 competidores directos del PIC de la gama media que
ofrecen recursos similares a los del PIC pero a un costo mayor, con muchas más
instrucciones, de mayores dimensiones, etc. Particularmente se presentarán
primero y en el orden siguiente el microcontrolador de ATMEL AT90S2313 (AVR )
con sus principales características, después seguirá el Motorola 68HC11 y por
último el 8051 de INTEL, se notará como es que estos microcontroladores
requieren tarjetas para desarrollo demasiado costosas y en precio superar al
PIC16F84 de MICROCHIP, presentando similares recursos y características y en
algunos casos inferiores con respecto al PIC.
AT90S2313 (AVR )
Es un microcontrolador de 8 bits con un encapsulado de 20 pines. Parte de estos
pines tienen una función específica y no pueden ser reconfigurados (VCC,
GND,RESET, XTAL1 y XTAL2). Otros, tienen un modo de trabajo totalmente
configurable por programa y dependerá de la aplicación en la que se aplique.
28
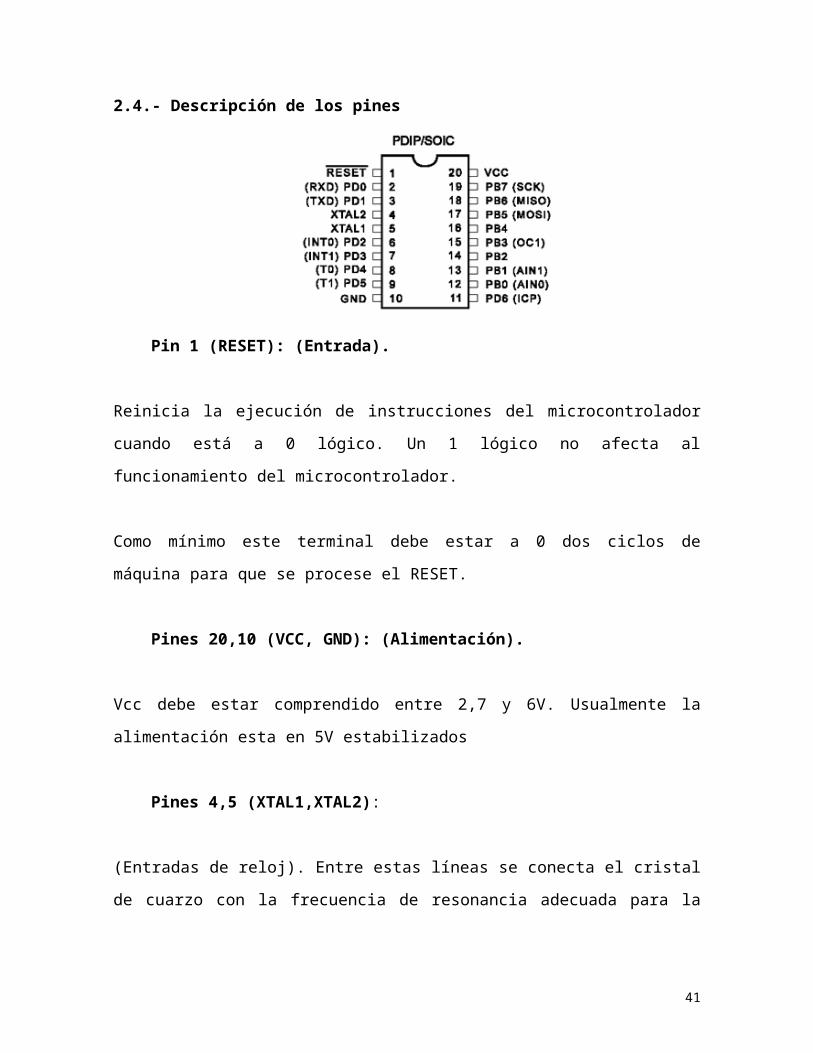
2.4.- Descripción de los pines
Pin 1 (RESET): (Entrada).
Reinicia la ejecución de instrucciones del microcontrolador
cuando está a 0 lógico. Un 1 lógico no afecta al funcionamiento del
microcontrolador.
Como mínimo este terminal debe estar a 0 dos ciclos de máquina para que se
procese el RESET.
Pines 20,10 (VCC, GND): (Alimentación).
Vcc debe estar comprendido entre 2,7 y 6V. Usualmente la alimentación esta en
5V estabilizados
Pines 4,5 (XTAL1,XTAL2):
(Entradas de reloj). Entre estas líneas se conecta el cristal
de cuarzo con la frecuencia de resonancia adecuada para la generación del reloj
interno, o por el terminal XTAL1 se introduce la señal de reloj del sistema.
29

Pin 2 PD0 (RX). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 0 del
puerto D, además puede tener la función especial de recepción de datos serie
para la UART.
Pin 3 PD1 (TX). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 1 del
puerto D, también puede tener la función especial de transmisión de datos serie
desde la UART.
Pin 6 PD2 (INT0). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 2 del
puerto D, además puede usarse para la generación externa de interrupción.
30

Pin 7 PD3 (INT1). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 3 del
puerto D, además puede usarse para la atender interrupciones externas.
Pin 8 PD4 (T0). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 4 del
puerto D, además puede usarse como entrada de reloj para el
temporizador/contador 0.
Pin 9 PD5 (T1). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 5 del
puerto D, además puede usarse como entrada de reloj para el
temporizador/contador 1.
Pin 11 PD6 (ICP). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 6 del
puerto D, además puede usarse como entrada de captura de cuenta del
temporizador/contador 0.
31

Pin 12 PB0 (AIN0). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 0 del
puerto B, además puede usarse como una de las dos entradas analógicas del
comparador analógico integrado.
Pin 13 PB1 (AIN1). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 1 del
puerto B, además puede usarse como una de las dos entradas analógicas del
comparador analógico integrado.
Pin 14 PB2. (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 2 del
puerto B.
Pin 15 PB3 (OC1). (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 3 del
puerto B, además puede usarse como salida del temporizador/contador 1.
Pin 16 PB4. (Bidireccional).
Este terminal puede funcionar como entrada o salida digital asociado al BIT 4 del
puerto B.
Pines 16,17,18 / PB5,6,7 (MOSI,MISO,SCK). (Bidireccionales).
Estos terminales pueden funcionar como entradas o salidas digitales asociadas a
32
los bits 5,6,7 del puerto B, además pueden usarse como terminales para la
comunicación serie síncrona para la programación de la memoria flash interna.
2.5.- Descripción interna.
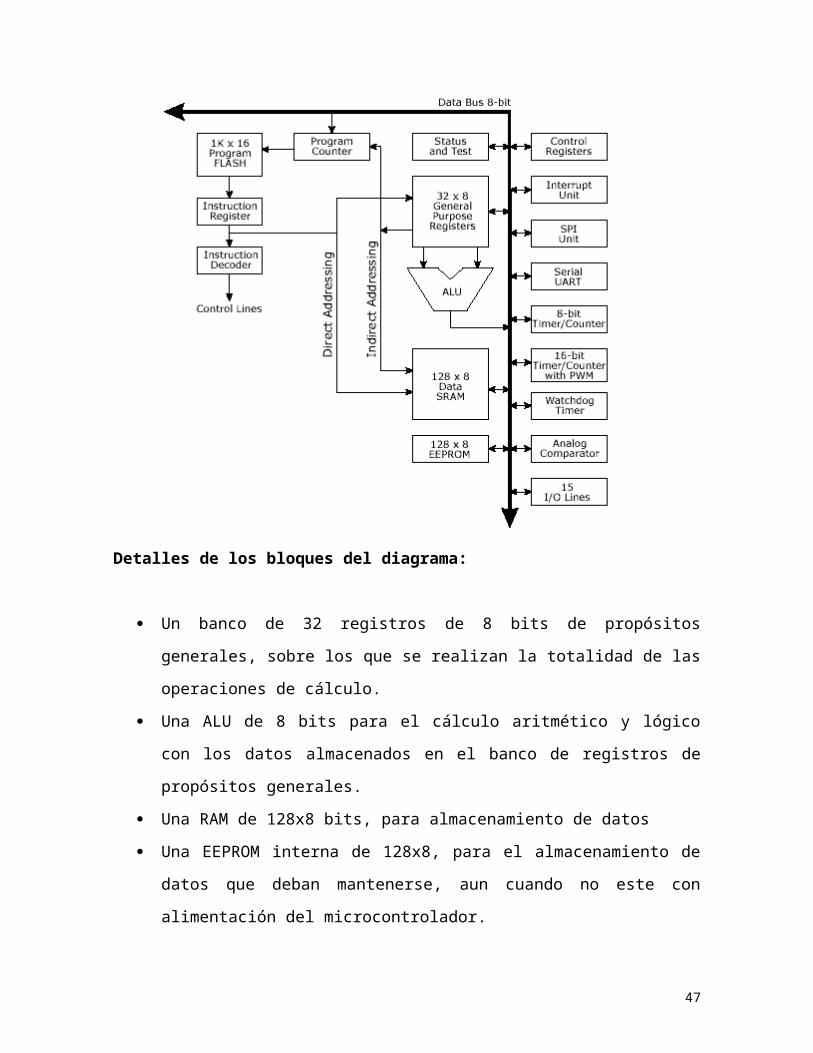
En la siguiente figura muestra el diagrama en bloques de la arquitectura interna
del AT90S2313 AVR (RISC)
Detalles de los bloques del diagrama:
Un banco de 32 registros de 8 bits de propósitos generales, sobre los que
se realizan la totalidad de las operaciones de cálculo.
Una ALU de 8 bits para el cálculo aritmético y lógico con los datos
almacenados en el banco de registros de propósitos generales.
Una RAM de 128x8 bits, para almacenamiento de datos
33

Una EEPROM interna de 128x8, para el almacenamiento de datos que
deban mantenerse, aun cuando no este con alimentación del
microcontrolador.
Una memoria Flash EPROM de 1Kx16 bits para el almacenamiento de las
instrucciones del programa. Esta memoria dispone de un bus dedicado,
distinto del de datos, por el que transitan las instrucciones hacia el
decodificador de instrucciones,encargado de su ejecución.
Un puerto serie asíncrono o UART
Un puerto serie síncrono SPI
Un contador /temporizador de 8 bits
Un contador /temporizador de 16 bits con funciones de PWM, generación
de salida, control, etc.
Un WATCHDOG o perro guardián que vigila el correcto funcionamiento del
programa.
Un comparador analógico
15 líneas de entrada/salida
Una unidad de generación de interrupciones
En la siguiente figura se muestra el mapa de memoria de programa y datos.
34
Como podemos observar, el microcontrolador utiliza una arquitectura
HARVARD, donde la memoria de datos y programa tienen buses independientes.
La memoria de programa presenta 1k direcciones de 16 bits. Cada
instrucción. A pesar de los diferentes modos de direccionamiento que presente,
ocupa 16 bits, por lo que cada dirección de la memoria de programa contiene
aproximadamente una instrucción.
La memoria de datos se divide en tres regiones. La inferior, que ocupa las
primeras 32 direcciones, esta ocupada por el banco de registros de propósitos
generales (direcciones $00-$1F); La región central, cubre 64 direcciones en donde
se ubican los registros asociados a los diferentes puertos de entrada/salida del
microcontrolador, UART, comparador analógico, PUERTO B, PUERTO D, etc
direcciones $20-$5F). La región más alta, ocupa 128 posiciones y está asociada a
la memoria SRAM (direcciones $60-$DF).
Registros de propósitos generales
Todas las instrucciones que operan con los contenidos de los registros tienen
acceso al conjunto del banco, salvo las instrucciones que cargan datos de forma
35

inmediata como SBCI, SUBI, CPI, ANDI, ORI y LDI que sólo acceden a la segunda
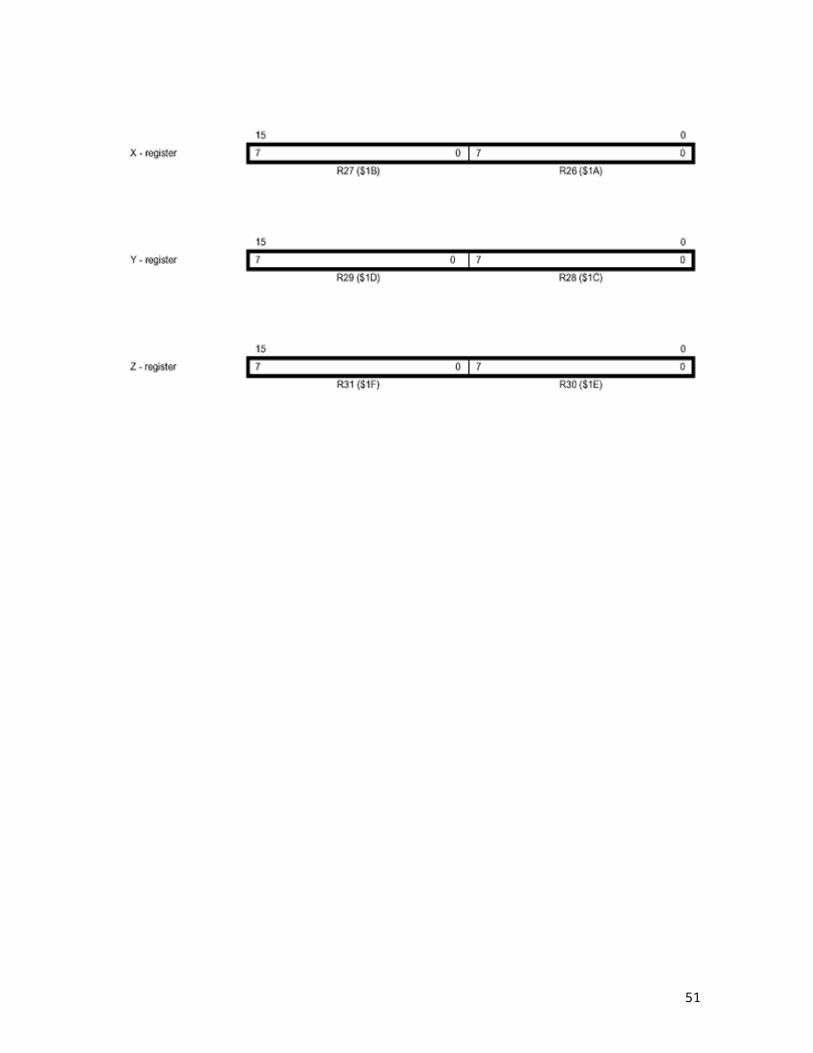
mitad de los registros (R16..R31) Como ya se dijo con anterioridad, cada registro
está también mapeado en memoria, así el registro r31 ocupa la dirección $1F del
espacio de memoria de datos, etc. Los últimos 6 registros del banco, r26-r31,
pueden tener funciones alternativas como apoyo a los modos de direccionamiento,
en ese caso, se agrupan por pares para constituir los registros X,Y,Z de 16 bits
cada uno.
36

La memoria de datos SRAM.
La siguiente figura muestra cómo esta organizada la memoria datos
Muchas instrucciones utilizan el nombre del registro (R0..R31) en lugar de la
dirección que ocupa este en el espacio de direccionamiento de datos.
De forma parecida ocurre con los registros de I/O. Las instrucciones de entrada y
salida permiten reasignar un número a cada uno de ellos, de forma que el primer
registro de este tipo que encontramos se numera como 0 (dirección $20), el
siguiente, 1 (dirección $21) y así sucesivamente.
37

Modos de direccionamiento de datos y programas El AVR AT90S2313 permite 5 modos de direccionamiento de datos:
Directo
Indirecto
Indirecto con predecremento
Indirecto con postincremento
Indirecto con desplazamiento
Inmediato
MODO DE REGISTRO DIRECTO
La instrucción contiene un campo de 5 bits que permite especificar cualquier
registro de los 32 registros existentes en el mapa de registros
El operando es contenido en registro d (Rd).
38

MODO DE REGISTRO DIRECTO (2 REGISTROS)
La instrucción contiene la dirección del operando fuente (Rr) y del destino
(Rd)(ambos operandos son registros del mapa de registros).
Los Operandos son contenidos en los registros r (Rr) y d (Rd).
El resultado se guarda en registro d (Rd).
MODO DE REGISTRO E/S DIRECTO
En este caso, la instrucción contiene la dirección de 6 bits del registro de E/S.
N es el registro que actúa como fuente o destino de la información
39
MODO DE DIRECCIONAMIENTO DIRECTO
La instrucción viene acompañada de una palabra de 16 bits que contiene la
dirección de memoria (SRAM, E/S, FILE REGISTER), además de un campo Rd/Rr
que contiene el registro que será fuente o destino de la información.
MODO DE DIRECCIONAMIENTO INDIRECTO CON DESPLAZAMIENTO
La instrucción contiene el desplazamiento que se sumará al registro Y o Z
para formar la dirección donde se encuentra el operando.
40
MODO DE DIRECCIONAMIENTO INDIRECTO
La dirección del operando se encuentra en el registro X, Y o Z especificado
en el código de operación de la instrucción.
MODO DE DIRECCIONAMIENTO INDIRECTO CON PREDECREMENTO
Es igual al modo anterior, con la diferencia que en este caso, el registro
X,Y,Z previamente se decrementa en una unidad.
41

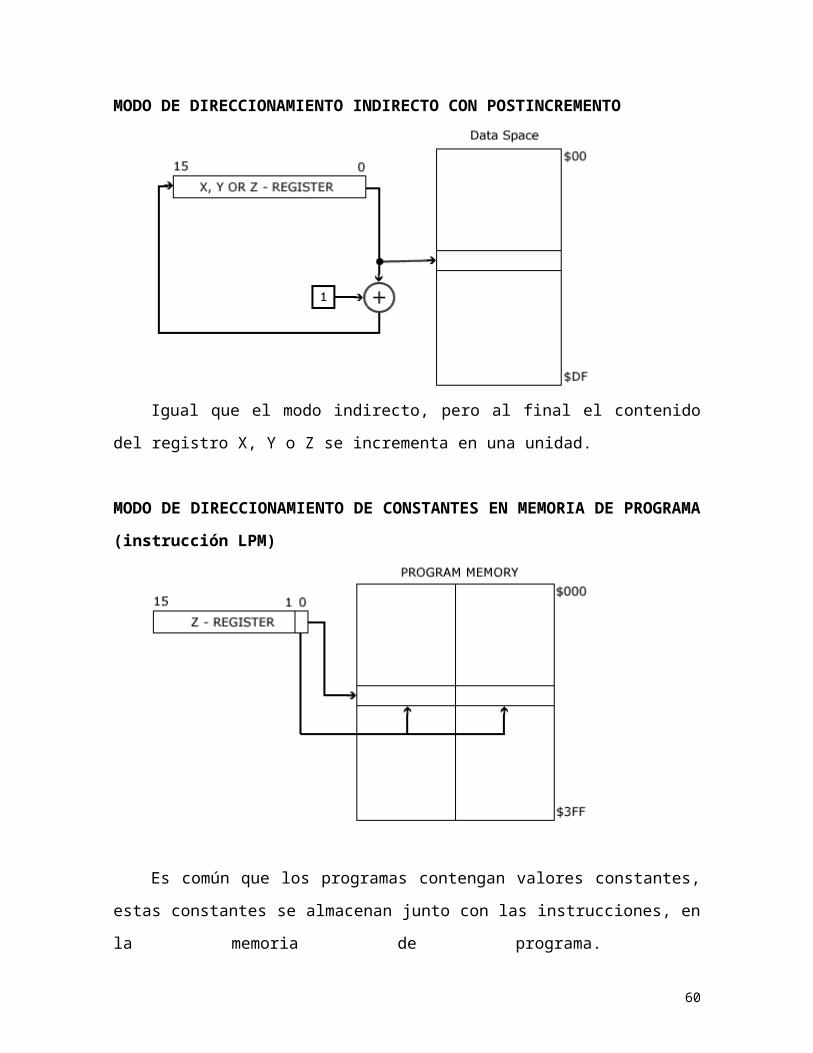
MODO DE DIRECCIONAMIENTO INDIRECTO CON POSTINCREMENTO
Igual que el modo indirecto, pero al final el contenido del registro X, Y o Z se
incrementa en una unidad.
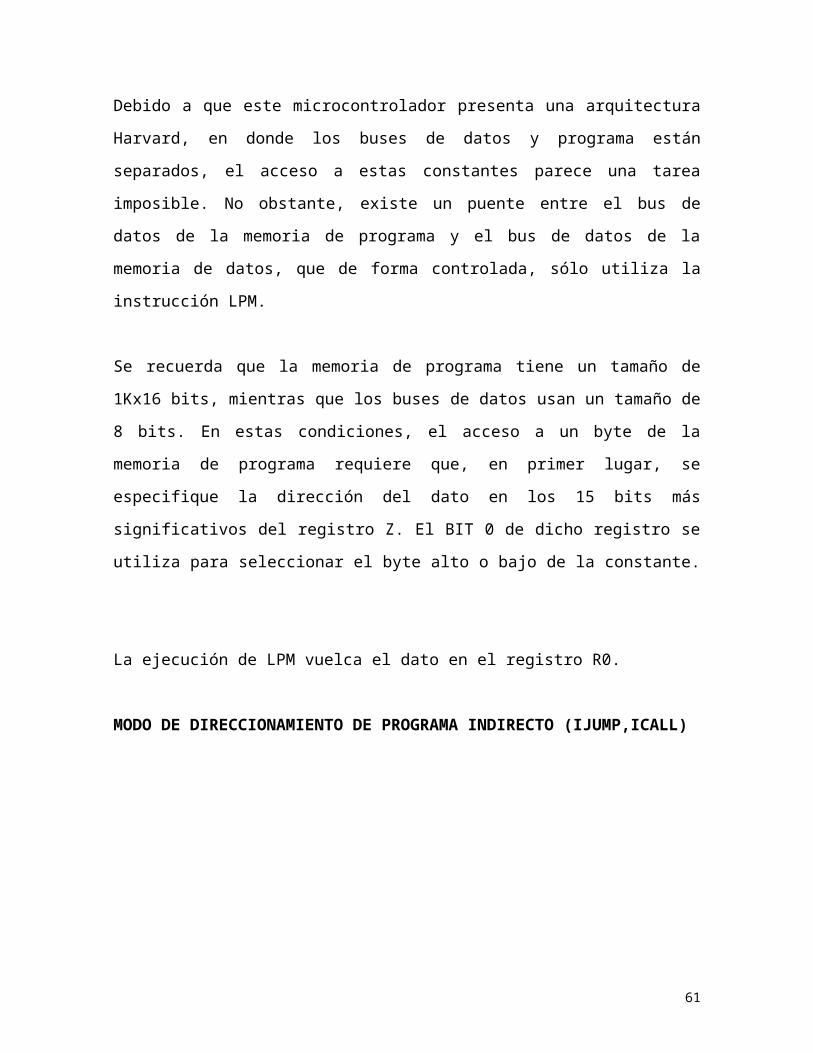
MODO DE DIRECCIONAMIENTO DE CONSTANTES EN MEMORIA DE PROGRAMA (instrucción LPM)
Es común que los programas contengan valores constantes, estas
constantes se almacenan junto con las instrucciones, en la memoria de programa.
Debido a que este microcontrolador presenta una arquitectura Harvard, en donde
los buses de datos y programa están separados, el acceso a estas constantes
parece una tarea imposible. No obstante, existe un puente entre el bus de datos
42
de la memoria de programa y el bus de datos de la memoria de datos, que de
forma controlada, sólo utiliza la instrucción LPM.
Se recuerda que la memoria de programa tiene un tamaño de 1Kx16 bits, mientras
que los buses de datos usan un tamaño de 8 bits. En estas condiciones, el acceso
a un byte de la memoria de programa requiere que, en primer lugar, se especifique
la dirección del dato en los 15 bits más significativos del registro Z. El BIT 0 de
dicho registro se utiliza para seleccionar el byte alto o bajo de la constante.
La ejecución de LPM vuelca el dato en el registro R0.
MODO DE DIRECCIONAMIENTO DE PROGRAMA INDIRECTO (IJUMP,ICALL)
Estas instrucciones permiten que la ejecución del programa salte a la
posición de la memoria de programa indicada por el contenido del registro Z.
43
MODO DE DIRECCIONAMIENTO RELATIVO DE PROGRAMA (RJMP ,RCALL)
La instrucción contiene un desplazamiento K que se suma al contenido del
PC para encontrar la siguiente instrucción a ejecutar. Esto es, la ejecución del
programa continua en la dirección PC+k+1 los valores validos de k van desde -
2048 a 2047.
El diseño del conjunto de instrucciones conocido también como Instruction
Set Architecture (ISA) es la parte del procesador que es visible al programador o al
diseñador de compiladores. El ISA es la interfaz entre el software y el hardware.
Para dar órdenes al “hardware” de la computadora es necesario hablarle en
su lenguaje. Las palabras de la máquina se denominan instrucciones y vocabulario
se denomina al repertorio de instrucciones o conjunto de instrucciones. Es este
capítulo se desarrollará el diseño de la arquitectura del conjunto de instrucciones
del procesador, buscando implementar un lenguaje que haga fácil la construcción
del hardware, también se desarrollaran los caminos de datos adecuados, para
ejecutar las instrucciones.
44

2.6 TIPOS DE ARQUITECTURA DEL CONJUNTO DE INSTRUCCIONES
Con respecto a la cantidad de instrucciones que soporta un procesador,
éstos se pueden clasificar en dos tipos:
CISC (complex instruction set computer) Computadoras con un
conjunto de instrucciones complejo.
RISC (reduced instruction set computer) Computadoras con un
conjunto de instrucciones reducido.
Conjunto de Instrucciones CISC
Es el tipo más antiguo y común, su característica más esencial es la
microprogramación. Tienen una gran cantidad de instrucciones y por tanto son
muy rápidos procesando código complejo. Las instrucciones compuestas son
decodificadas internamente y ejecutadas con una serie de microinstrucciones
almacenadas en una ROM interna. Para esto se requieren de varios ciclos de
reloj. Los procesadores CISC más populares son los de la familia 80x86 de Intel.
Conjunto de Instrucciones RISC
Lo tienen procesadores con un conjunto de instrucciones sencillas; permiten una
ejecución más rápida de las instrucciones. El código complejo puede descomponerse en
instrucciones más elementales, evitando así retardos de la memoria principal, haciendo uso
de numerosos registros y memoria caché. El diseño en hardware de este tipo de
procesadores es más sencillo en comparación a los CISC. Otro de los objetivos del RISC es
lograr que cada instrucción se realice en un solo ciclo de reloj.
La ventaja que ofrece el procesador es la rapidez, pero para alcanzarla es conveniente que las instrucciones sean simples. La tendencia
45

actual es que los procesadores contengan pocas instrucciones y que éstas sean sencillas para ejecutarlas en un ciclo de reloj.
Los tipos de instrucciones en general se pueden clasificar de la siguiente forma:
Instrucciones de transferencia. Mueven la información entre las
localidades de Memoria Principal y los registros del procesador
Instrucciones aritméticas y lógicas. Son las encargadas de efectuar
básicamente la suma y resta, así como, realizar operaciones AND, OR y XOR.
Instrucciones de salto. Rompen la ejecución ordenada de las
instrucciones que componen un programa. Con la mayoría de las instrucciones, el
contador de programa se incrementa para apuntar a la siguiente instrucción que
hay en la secuencia del programa. Sin embargo, las instrucciones de salto cargan
en el PC valores aleatorios que modifican el flujo ordenado de las instrucciones de
un programa. Existen instrucciones de salto que son condicionales, es decir, para
que se altere el PC es necesario que se cumpla alguna condición, en caso
contrario continúa el flujo ordenado de las instrucciones.
2.7 CONSIDERACIONES MÁS COMUNES PARA EL DISEÑO DE LA ARQUITECTURA DEL CONJUNTO DE INSTRUCCIONES
Al diseñar la arquitectura del conjunto de instrucciones de un procesador
se debe tomar en cuenta, el número de instrucciones a manejar, el número de
operandos que tendrán las instrucciones, los tipos y tamaños de éstos, etc. A
continuación se mencionan algunas características que hacen la diferencia entre
las arquitecturas de conjunto de instrucciones:
46
Operandos almacenados en la CPU. Se refiere a que algunas ISA
guardan los operandos en localidades internas del CPU.
Número de operandos por instrucción. Es el número de operandos que
son nombrados en una instrucción.
Localidad del operando. El operando puede encontrarse o localizarse en
la memoria o estar guardado internamente en la CPU.
Instrucciones. Las instrucciones que formaran parte del conjunto de
instrucciones.
Tipo y tamaño de los operandos. se definen y se especifica el tipo y
tamaño de los operandos.
De las características arriba mencionadas, el almacenamiento interno en
la CPU es lo que hace la diferencia primordial entre los procesadores.
Tipos de ISA con respecto a la forma de almacenamiento de los datos.
Existen tres tipos de ISA que son las más comunes y son los siguientes:
Acumulador – Se utiliza un registro llamado acumulador, ya que todas las
operaciones se acumulan en éste. Por ejemplo.
Instrucción Operación
add A acc - acc + mem[A]
La instrucción 1 realiza una suma de un dato en memoria y el acumulador
(acc), el resultado se almacena en el acumulador.
47

Pila - Los operandos se encuentran en el tope de la pila. Así todas las
operaciones se realizan en el tope de la pila. Por ejemplo.
Instrucción Operación
add top - top + next
Se realiza una suma con los operandos que se encuentran en el tope de
la pila y el resultado se almacena en el tope.
Registros de Propósito General (GPR) – Los operandos que son
mencionados explícitamente, son almacenados en cada uno de los registros o en
localidades de memoria. Por ejemplo.
Instrucción Operación
1 add A B A = A + B
2 add A B C A = B + C
La instrucción 1 realiza la suma del registro A y B, el resultado es
almacenado en en registro A. La instrucción 2 hace la suma del registro B y C , el
resultado se almacena en A.
Diferencias entre los Tipos de Arquitecturas de Conjunto de Instrucciones
Acumulador
Ventajas: Maneja instrucciones cortas.
Desventajas: El acumulador es sólo un lugar de almacenamiento temporal
por lo tanto el tráfico en la memoria es mayor para este método.
Pila
48

Ventajas: Es un modelo simple para evaluar expresiones e instrucciones
cortas.
Desventajas: Una pila no puede ser accedida aleatoriamente, esto hace
difícil la generación de código eficiente. La pila es accedida por una misma
operación varias veces y llega a generar cuellos de botella.
Registros de Propósito General
Ventajas: Permite que la generación de código se realice fácilmente. Los
datos pueden permanecer almacenados en los registros durante largos periodos
de tiempo.
Desventajas: Todos los operandos deben ser nombrados y las instrucciones
son grandes.
Las primeras CPUs tenían las características de los dos primeros tipos
arriba mencionados, pero en los últimos 15 años todas las CPUs construidas son
procesadores de Registros de Propósito General. La razoón principal es que los
registros son más rápidos que la memoria, los datos pueden ser guardados
internamente en la CPU y ésto se refleja en la rapidez con la que un programa
corre. Otra razón es que los registros son más fáciles de usar por el compilador.
2.8.- CLASIFICACIÓN DE ISAs CON REGISTRO DE PROPÓSITO GENERAL
Existen dos características principales del conjunto de instrucciones que
dividen a las arquitecturas GPR, y éstas son:
Sí una instrucción aritmética-lógica tiene dos o tres operandos
ADD R3, R1, ADD R1,
49

R2
R3 <-R1 + R2or
R2
R1 <- R1 + R2
Los operandos pueden ser direcciones de memoria en instrucciones
aritmético-lógicas, y éstas son las formas en que se pueden presentar:
Registro - Registro
ADD R3, R1, R2 (R3 <- R1 + R2)
Registro - Memoria
ADD R1, A (R1 <- R1 + A)
Memoria - Memoria
ADD C, A, B (C <- A + B)
2.9.- REDUCED INSTRUCTION SET COMPUTER (RISC)
Como se mencionó anteriormente los CPUs modernos son del tipo GPR (Registro de Propósito General). Como ejemplos de estos CPUs son la IBM 360,
DEC VAX, Intel 80x86 y Motorola 68xxx, sin embargo, estos CPUs fueron
claramente mejores que los CPUs anteriores basados en pila y acumulador, ya
que fueron mitigando inconvenientes en algunas áreas, pero presentaban los
problemas que se mencionan a continuación:
1. Las instrucciones varianban en longitud de 1 byte a 6-8 bytes. Esto
causa problemas con la prebúsqueda y “pipelining” de las instrucciones.
2. Las instrucciones aritmético-lógicas pueden tener operandos que son
localidades de memoria. Porque el número de ciclos tomados para acceder a
50
Tabla 2-1. Instrucción aritmética-lógica
memoria varía. Esto no es bueno para los diseñadores de compiladores,
“pipelining” y múltiples emisiones.
3. Muchas instrucciones aritmético-lógicas tenían sólo 2 operandos,
donde uno de los operandos también es el destino. Esto significa que el operando
es destruido durante la operación o se almacena antes en otro lugar.
A principios de los 80’s se introdujo la idea del RISC surgiendo del
proyecto SPARC iniciado en Berkeley y el proyecto MIPS en Stanford. RISC
significa Computadora de Conjunto Reducido de Instrucciones. El ISA es
compuesto de instrucciones donde todas tienen exactamente el mismo tamaño,
usualmente de 32 bits. Por lo que puede realizar satisfactoriamente la
prebúsqueda y el “pipelined”. Todas las instrucciones aritmético-lógicas tienen 3
operandos los cuáles sólo son registros. Los accesos a memoria solo se realizan a
través de instrucciones explícitas de Carga / Almacenamiento.
Por ejemplo el código ensamblador de A = B + C sería:
LOAD R1, A
LOAD R2, B
ADD R3, R1, R2
STORE C, R3
A pesar de que se realizan cuatro instrucciones, podemos reutilizar los
valores contenidos en los registros.
51

Conjuntos de Instrucciones Reducido
La arquitectura de conjunto de instrucciones reducido, trabaja con
instrucciones de una misma longitud, y el número de bits usados en el código de
operación es reducido. Por lo que menos instrucciones pueden ser realizadas.
Las instrucciones que son eliminadas de este tipo de conjunto de
instrucciones, son las operaciones menos importantes como cadenas y BCD
(binary-coded decimal). En efecto, ahora que los accesos a la memoria son
restringidos, no hay muchos tipos de instrucciones MOV o ADD. Por lo que la
arquitectura anterior es llamada CISC (Complete Instruction Set Computer). Las
arquitecturas RISC también son conocidas como arquitecturas de LOAD/STORE.
El número de registros en esta arquitectura usualmente es de 32 o más
registros. El primer CPU RISC fue el MIPS 2000, que tiene 32 GPRs
contrariamente a los 16 de la arquitectura 68xxx y 8 en la arquitectura 80x86. La
única desventaja del RISC es el tamaño de su código. Usualmente se necesitan
más instrucciones y hay una pérdida en instrucciones cortas (POP, PUSH).
Sin embargo, aun se siguen desarrollando CPUs CISC, Intel sigue
invirtiendo tiempo y dinero en la manufactura del Pentium II y el Pentium III, esto
ocurre, porque así permite mantener la compatibilidad. La IBM PC compatible es
la computadora más común en el mundo. Intel quiere una CPU que pueda correr
todas las aplicaciones que están en manos de más de 100 millones de usuarios.
Por otro lado Motorola construyo la serie 68xxx la cual es usada en la
Macintosh para hacer la transición y conjuntamente IBM y Apple construyeron el
Power PC (PPC) un CPU RISC, el cual es instalado en la nueva Power Macs.
52

2.10.- CONSIDERACIONES PARA EL DISEÑO DEL CONJUNTO DE INSTRUCCIONES RISC.
Es necesario tener algunas consideraciones en el diseño del hardware,
que también influyen en la arquitectura del conjunto de instrucciones, y son:
1. La simplicidad favorece la regularidad
2. Más pequeño es más rápido
3. Un buen diseño demanda compromisos
4. Hacer que el caso común sea rápido
La simplicidad favorece la regularidad
Esto se refiere a lograr que el hardware que obedece al conjunto de
instrucciones sea sencillo, al considerar que las instrucciones son de una misma
longitud y que sus formatos sean sencillos. Ya que cuando se tienen instrucciones
de diferentes longitudes y muchos formatos diferentes, el hardware sea complica.
Más pequeño es más rápido
Se refiere al tamaño y complejidad del hardware, ya que entre mas
pequeño y sencillo es más rápido.
Un buen diseño demanda compromisos
Existen problemas cuando una instrucción necesita campos mayores
que los estipulados. Por lo que se presenta un conflicto entre el propósito de que
todas las instrucciones tengan la misma longitud y de que todas las instrucciones
tengan un formato sencillo. Si el interés o compromiso es que las instrucciones
tengan una misma longitud, entonces será necesario manejar distintos tipos de
formatos para diferentes tipos de instrucciones.
53

Hacer que el caso común sea rápido
Una forma de evitar los accesos a memoria es tener diferentes
instrucciones aritméticas, es común que las operaciones aritméticas contengan
operadores constantes o de direccionamiento inmediato, permitiendo que estas
instrucciones sean mucho más rápidas que sí se cargasen de memoria.
2.11.- DISEÑO DEL CONJUNTO DE INSTRUCCIONES
En esta sección se define la arquitectura del conjunto de instrucciones
del procesador que se desarrollará en este trabajo de tesis.
Se determino que la arquitectura del conjunto de instrucciones será de
carga – almacenamiento o RISC, por las características que posee este tipo de
arquitectura. El conjunto de instrucciones contendrá operaciones básicas, el
tamaño de palabra o será de 16 bits.
Conjunto de Instrucciones
El conjunto de instrucciones consta de 14 instrucciones, las cuales se
subdividen de la siguiente manera:
Instrucciones Aritmético-Lógicas. add, sub, and, or, srl, sll.
Instrucciones de Acceso a Memoria. ld y st.
Instrucciones de Toma de Decisión. bc, bz.
Instrucciones de Salto. j
Instrucciones de Control. clr_c, set_c, load_p
54

Formatos
El tamaño de las instrucciones es de 16 bits y se manejan 4 tipos de
formatos a los que obedecen las instrucciones, y estos son los siguientes:
Instrucciones Aritméticas-Lógicas: Este tipo de instrucciones se componen
de cuatro campos, los cuales representan el código de operación (op), y tres
campos correspondientes a los registros operandos y destino (rf1, rf2 y rd),
respectivamente. Cada operando campo es representado por 4 bits, como se
muestra en el siguiente esquema.
Instrucciones de Acceso a memoria: El formato de instrucciones cuenta con
tres campos, que representan el código de operación (op), un campo para
denotar el registro y 8 bits para representar la dirección. A continuación se
muestra el esquema de este formato.
Instrucciones Toma de decisiones: El formato cuenta con tres campos,
código de operación (op), el desplazamiento representado por 8 bits y bits no
utilizados, este formato lo podemos ver a continuación.
Instrucciones de Salto: En el formato se tiene un campo de 4 bits
correspondiente al código de operación y el campo de dirección representado por
12 bits, como lo vemos a continuación.
55
15 12 11 8 7 4 3 0 op rf1 rf2 rd
op registro dirección15 12 11 8 7 0
op d i r e c c i ó n15 12 11 0
op xxxx desplazamiento15 12 11 8 7 0

Modos de Direccionamiento
Para este procesador se tienen 3 modos de direccionamiento, que son
los siguientes:
1. Direccionamiento de registro. El operando es un registro
2. Direccionamiento de página. La dirección efectiva se forma de la
concatenación del registro de página y el campo de dirección de la instrucción,
donde los bits más significativos son ocupados por el registro de página y los
restantes por el campo de dirección de la instrucción.
3. Direccionamiento relativo al PC. La dirección se compone al sumar el
contador de programa, más el desplazamiento.
56
15 12 11 8 7 4 3 0 op rf1 rf2 rd
R e g i s t r o
op registro dirección15 12 11 8 7 0
R e g. P a g.Memoria
op xxxx desplazamiento15 12 11 8 7 0
P C +Memoria
11 8 7 0
Figura 2-1. Modo de direccionamiento de registro
Figura 2-2. Modo de direccionamiento de página
Figura 2-3. Modo de direccionamiento relativo al PC

Instrucciones
add Suma con acarreo Sintaxis add rd, rf1, rf2
Suma el contenido de los registros rf1, rf2 y la bandera de acarreo, el
resultado es guardado en rd.
sub Resta con acarreo Sintaxis sub rd, rf1, rf2
Resta el contenido de los registros rf1, rf2 y la bandera de acarreo, guarda
el resultado en rd.
and Realiza la operación lógica AND Sintaxis and rd, rf1, rf2
Efectúa la operación lógica AND entre los registros rf1 y rf2, depositando el
resultado en rd.
or Realiza la operación lógica OR Sintaxis or rd, rf1, rf2
Realiza la operación lógica OR entre los registros rf1 y rf2, guarda el
resultado en rd.
srl Realiza corrimiento lógico a la derecha Sintaxis srl rd, rf1, rf2
Corrimiento lógico a la derecha, a rf1 se le aplica el número de corrimientos
contenido en rf2, guarda el resultado en rd.
sll Realiza corrimiento lógico a la izquierda Sintaxis sll rd, rf1, rf2
Corrimiento lógico a la izquierda, a rf1 se le aplica el número de
corrimientos contenido en rf2, el resultado se coloca en rd.
57

ld Cargar palabra Sintaxis ld rd, dir
El registro rd es cargado con el contenido de la dirección de memoria
compuesta por el contenido del registro que almacena el número de página y la
dirección estipulada en dir.
st Almacenar palabra. Sintaxis st rd, dir
Almacenar palabra, el contenido del registro rd es transferido a la dirección
de memoria compuesta por el número de página y la dirección dir.
bc Saltar si la bandera de acarro esta habilitada. Sintaxis bc desplazamiento
Si la bandera de acarreo es 1, el PC se desplaza en el número de
localidades denotado por desplazamiento. Si la bandera de acarreo es 0 entonces
continua con la siguiente instrucción.
bz Saltar si la bandera de cero esta habilitada Sintaxis bz desplazamiento
Si la bandera de cero es 1, el PC se desplaza en el número de localidades
denotado por desplazamiento. Si la bandera de acarreo es 0 entonces continua
con la siguiente instrucción.
j Salto incondicional Sintaxis j dir
Salta a la dirección de memoria dir.
58

clr_c Limpiar bandera de acarreo. Sintaxis clr_c
La bandera de acarreo es puesta a cero.
set_c Establece bandera de acarreo. Sintaxis set_c
La bandera de acarreo es puesta a uno.
load_p Cargar página Sintaxis load_p pagina
El registro de página es cargado para usarlo con posteriores
direccionamientos.
Elementos necesarios para la implementación del conjunto de instrucciones.
El diseño de la implementación del “datapath” o camino de datos de un
procesador esta determinado en gran parte por la arquitectura del conjunto de
instrucciones que se tenga, por lo que es importante agrupar las instrucciones y
analizar que elementos electrónicos se necesitan para que éstas se lleven a cabo,
una vez realizado esto es importante identificar elementos que son comunes en
los diferentes tipos instrucciones que se tiene. Posteriormente, se determinara el
tipo de camino de datos a implementar, basándose en la frecuencia de reloj y el
número de instrucciones por ciclo (CPI), que se requiera.
A continuación analizaremos los elementos que se necesitan para que las
instrucciones del ISA propuesto se lleven acabo. Así también realizaremos la
implementación de cada uno de los elementos en el lenguaje de descripción en
Hardware Verilog.
59
Búsqueda de instrucciones
El primer elemento necesario es un elemento o dispositivo que almacene las
instrucciones de un programa, para lo cual se hace uso de una unidad de memoria que almacene y proporcione las instrucciones en base a una dirección
dada. También se necesita un elemento que contenga la dirección de la
instrucción, conocido como contador de programa (PC), para poder ejecutar el
programa almacenado en la memoria es necesario leer cada una de las
instrucciones del programa, por lo que es necesario un elemento que realice el
incremento necesario de la dirección de memoria, esto puede hacerse a través de
un sumador que incremente la dirección actual en un determinado número de
localidades para ir a la siguiente instrucción. El datapath necesario para realizar lo
anteriormente dicho se ilustra a continuación.
El PC es de 12 bits con lo que se podrán direccionar hasta 212 localidades de
memoria. A continuación se muestra el diagrama y código en verilog.
60
PC Memroira
de Instrucciones
AddIncremento
Instrucción
Figura 2-4. Datapath para la búsqueda de instrucción.
reset
DireccionPC
PC_E
clk_PC
Direccion_PC
module PC(clk_PC, reset, direccion, PC_E, direccion_PC);
input clk_PC, PC_E, reset;input [11:0] direccion;
output [11:0] direccion_PC;reg [11:0] direccion_PC;
always @(posedge clk_PC)begin
if(reset) direccion_PC = 12'b000000000000;else if (PC_E) direccion_PC = direccion;
end
endmodule
Figura 2-5. Código Verilog y Diagrama del Contador de programa PC.
La memoria de instrucciones tiene un tamaño de 212 localidades de 16 bits
cada una. En seguida vemos segmento del código de una memoria de
instrucciones y su diagrama.
El sumador es de 14 bits y su código y representación gráfica se ilustra
enseguida.
61
module Memo_Instr (pc, rst, instruccion);
input [11:0] pc ;input rst;output [15:0] instruccion ;reg [15:0] instruccion ;
always @(pc) begin if (rst) instruccion = 16'b0; else begin case (pc) 12'b000000000000 : instruccion = 16'b0111000000001100 ; 12'b000000000001 : instruccion = 16'b1100001100100000 ; 12'b000000000010 : instruccion = 16'b1110010001010001 ; . . . endcase endendendmodule
MemoriaDe
Instrucciones
pc
rst
Instruccion
Figura 2-6. Código Verilog y Diagrama de la Memoria de Instrucciones.

Instrucciones Aritmético-Lógicas
Las instrucciones que se encuentran dentro de esta agrupación son: la suma
(add), resta (sub), la operación and (and), or (or), corrimiento a la derecha (srl), y
corrimiento a la izquierda (sll).
Para ejecutar las instrucciones se necesita primeramente obtener los datos a
procesar del banco de registros e introducirlos a una unidad lógica aritmética,
para que realice la operación. El datapath correspondiente se representa de la
siguiente manera.
Banco de registros
El ISA propuesto realiza las operaciones a través del uso de registros, por lo
que es necesario contar con un banco de registros. El banco de registros,
permite leer o escribir un dato especificando el número de registro.
62
module sumador_PC(dir_PC, PC_incrementado);
parameter INC=1'b1;
input [11:0] dir_PC;output [11:0] PC_incrementado;
assign PC_incrementado = dir_PC + INC ;endmodule
Sumador
PC
INC
dir_PC
PCincrementado
Figura 2-7. Código Verilog y Diagrama del Sumador.
Banco deRegistrosEscReg
Reg1
EscDato
ALU
escribir
Reg2
Resultado
operacion
Figura 2-8. Diagrama del datapath de Instrucciones aritmético-lógicas.

Considerando el formato de las instrucciones aritmético-lógicas, se requieren
de tres operandos de registros, dos para leer los datos del banco de registros y
uno para escribir el resultado en un registro. Por lo que es necesario que el banco
de registros cuente con dos entradas para indicar los registros a leer y dos salidas
para leer el dato contenido en los registros respectivos. Para escribir un dato es
necesario tener una señal que indique cuando se realizará una escritura, así como
una entrada para indicar el registro a escribir y otra para proporcionar el dato.
El banco de registros cuenta con 16 registros de 16 bits, ya que es el número
de registros que permite al procesador realizar de forma eficientemente los
programas que se propongan, cada registro tiene un ancho de 16 bits, puesto que
el tamaño de los datos estipulados en el diseño de la arquitectura fue de 16 bits.
Las entradas para leer o escribir registro deben ser de 4 bits para poder
direccionar los registros del cero al quince (16 registro). Las salidas y la entrada
para el dato a escribir son de 16 bits. Esto se representa en el diagrama que se
muestra enseguida, así como parte del código de implementación en Verilog.
63
we
module Registros (clk, rst, we, wr, r1, r2, wd, d1, d2);input clk, rst;...output [15:0] d1;...reg [15:0] ram [15:0];always @(posedge clk or posedge rst) begin if (rst) begin ram[0] <= 5; ram[1] <= 1; ....... ram[14] <= 14; ram[15] <= 15; endend assign d1 = ram[r1]; assign d2 = ram[r2];endmodule
Banco de
Registroswr
d1r1
r2
wd d2
Figura 2-9. Código Verilog y diagrama del Banco de registros.

Unidad aritmético-logica (ALU)
Realiza operaciones de suma, resta, and, or, corrimientos a la derecha e
izquierda. La ALU es de 16 bits y realiza las operaciones para números sin signo.
Tiene dos entradas para los datos a procesar y 3 salidas, una para el resultado y
dos para señales de acarreo y cero. A continuación se muestra el diagrama e
implementación en Verilog de la ALU.
Instrucciones de acceso a memoria
Las instrucciones de acceso a memoria son: carga (ld) y almacenamiento (st)
de dato. Almacenar o cargar un dato de memoria, implica leer o escribir en un
registro del banco de registro y escribir o leer un dato en una localidad de la
memoria de datos. Para direccionar la memoria se hace uso de la paginación,
para lo cual es necesario un registro de pagina, que es de 4 bits. La dirección de
la memoria esta compuesta en los primeros 4 bits por la página y enseguida por
la dirección estipulada en la dirección. A continuación se ilustra el datapath
correspondiente a este tipo de instrucciones.
64
module ALU(ctrl_ALU, A, B, c_en, c_sal, cero, R);
input [2:0] ctrl_ALU;input [15:0] A, B;input c_en;output c_sal, cero;output [15:0] R;reg [15:0] Raux, R;........always @( ctrl_ALU or A or B or c_en) begin case (ctrl_ALU) suma: begin {c_sal,R} = A + B + c_en;
cero = (R == 1'b0) ? 1'b1: 1'b0; end resta: begin {c_sal,Raux} = A - B - c_en;
if (c_sal == 1) R=(~Raux)+1; else R=Raux; cero = (R == 1'b0) ? 1'b1: 1'b0; end
op_and: begin R = A & B; c_sal = 1'b0; cero = 1'b0; end ....... endcase end endmodule
ALU
A
B
R
c_salc_en
ctrl_ALU c_en
Figura 2-10. Código Verilog y Diagrama de la ALU

La memoria de datos puede direccionar hasta 212 localidades, cada
localidad tiene un ancho de 16 bits, un segmento de código y el diagrama de ésta,
podemos verlo enseguida.
El registro de página, contiene el número de página en el que se
direccionará, este registro es de 4 bits que se concatena con la dirección
representada en la instrucción. El código y diagrama se ilustran enseguida.
65
Banco deRegistrosEscReg
Reg1
EscDato
escribir
Reg2Dato
Direccion
Memoria de datos
Página
Figura 2-11. Diagrama del datapath para ejecutar instrucciones de toma de decisiones.
module Memo_Datos(clk, rst_memo, esc_memo, dir, dato_e, dato_s);
input [15:0] dato_e;....output [15:0] dato_s;
reg [15:0] ram[31:0];
always @(posedge clk or posedge rst_memo)begin if (rst_memo) begin ram [0] <= 1; ram [1] <= 2; ram [2] <= 3; .... ram[30] <= 31; ram[31] <= 31; end else if (esc_memo) ram [dir] <= dato_e; endassign dato_s = ram[dir];endmodule
Memoriade
Datos
dato_e
rst_memo
dato_s
dir
clk
esc_memo
Figura 2-12. Código Verilog y diagrama de la memoria de datos.

Instrucciones de Toma de decisiones y Salto
La instrucciones de toma de decisiones y salto, son: saltar si la señal de
acarreo esta activa (bc), saltar si la señal de cero esta activa (bz) y saltar a cierta
dirección (j). Para ejecutar estas instrucciones se necesita modificar el datapath de
la búsqueda de instrucciones, ya que es allí donde se almacena la dirección de la
siguiente instrucción, por lo que se agregaría un multiplexor para decidir que
dirección será la siguiente: si la estipulada en el salto condicional, la secuencia
normal del programa o será otra dirección, la decisión sobre que dirección se
ejecutará, la proporciona el control del procesador.
Instrucciones de Control
Las instrucciones de limpiar señal de acarreo (clr_c), establecer bandera de
acarreo (set_c), cargar página (load_p), no necesitan un hardware especial, ya
que éstas pueden ser ejecutadas por líneas de control.
Una vez que ya conocemos los caminos de datos o “datapath” necesarios
para realizar las instrucciones, podemos combinarlos en un sólo datapath y
realizar el control necesario para que las instrucciones se lleven a cabo. Para
realizar el datapath del conjunto de instrucciones, es necesario determinar el tipo
de datapath mas adecuado para la implementación. Esto lo veremos en el capítulo
cuatro.
66
module Pagina (pag_E,, pag, s_Pag);
input pag_E;input [3:0] pag;output [3:0] s_Pag;
assign s_Pag = pag_E ? pag : 0;
endmodule
Paginapag_E s_Pag
Figura 2-13. Código Verilog y diagrama del registro de página.

En el siguiente capítulo hablaremos de las herramientas que se
utilizaran para el diseño, simulación e implementación del camino de datos o
datapath.
CAPITULO 3.- PROGRAMADORES
En este capitulo se tratarán los programadores existentes.
NOPPP, the "No-Parts" PIC Programmer
NOPPP es un sencillo programador para los microcontroladores PIC16C84,
PIC16F83 y PIC16F84. Se conecta al puerto paralelo del PC. Un extenso artículo
con los planos y descripción fué publicado en Electronics Now Magazine,
Septiembre de 1998.
El NOPPP es inusualmente simple y utiliza componentes fácilmente
localizables.Probablemente ya tendrás todos los componentes necesarios. Aquí
tienes el circuito (modificado ligeramente respecto al diseño original para mayor
fiabilidad):
En el PIC, la patilla MCLR se pone a +5V para el funcionamiento normal (no
se usa aquí), a +12V para grabación, y a 0V para resetear. Realmente los +12V no
"queman una EPROM" -- el voltaje superior es meramente una señal para activar
67

el circuito interno de programación de la memoria flash. Debe ser mayor de 12.0
volts. La salida D0 del PC controla esta señal. No hay peligro para el chip si se
aplica esta señal en un momento inadecuado.
El PIC se comunica mediante protocolo serie síncrono de dos líneas (mas
masa).El Pin B6 es la señal de strobel; los pulsos en este pin le indican al PIC
cuando debe recibir o transmitir cada bit de datos. El Pin B7 se utiliza como
entrada y salida. Cuando el PIC está recibiendo datos desde el PC, la señal
SLCTIN es mantenida a nivel bajo y por lo tanto D2 no conduce por lo que D1 y
R1 no se utilizan en este momento y el PIC recibe los datos mediante la señal
AUTOFD.
Cuando el PIC está enviando datos, las señales SLCTIN y AUTOFD están a
nivel alto, D1 no conduce y D2 y R1 proporcionan la polarización (pull-up). La
resistencia R2 mas la resistencia interna de la línea AUTOFD (dentro del puerto
del PC normalmente 4.7k, auque a veces mucho menos en los nuevos puertos
paralelos CMOS) proporcionan algo de Pull-up adiciona. El PC lee la información
através de la línea BUSY, que es 0.6V mayor que la salida del PIC debido al diodo
D2. El puerto paralelo del Pc tiene (o debería tener) entradas CMOS o Schmitt y
no debería necesitar verdaderos niveles lógicos TTL.
R2 y R3 ayudan a reducir las interferencias aislando la capacidad de entrada
del PIC, de modo que circule menos corriente durante transiciones bruscas.El PIC
tiene entradas del tipo Schmitt, que no impiden la reducción del tiempo de subida
(rise tiem). R4 proteje la base de Q1
El circuito original publicado en Electronics Now es suficientemente fiable.
Sin embargo, revisando una revista me encontre un circuito con algunas
modificaciones, me tome la molestia de armarlo y con la novedad de que funciona
perfectamente y aqui te lo muestro. Novedades del circuito, usa diodos 1n4148,
transistores bc548 y se omiten algunas resistencias .
68

Para alimentar el circuito se requieren dos fuentes de alimentacion reguladas
una de 5 volts y una de 12 volts.
El software original para este programador esta desarrollado en c y funciona
perfectamente bajo una ventana de ms-dos, pero eso no es todo tambien hay una
version adaptada del noppp para windows que de igual manera ya la he probado y
funciona muy bien y aqui te las presento un mano a mano.
El circuito.
Este programador, basado en el Ludipipo, está adaptado a la programación
de PICs, es simple y barato (2 euros), pero permite programar a través del puerto
serie de cualquier PC de sobremesa (en los portátiles da problemas) una cantidad
nada despreciable de PICs distintos, y todo ello utilizando software de
programación estándar, como ICPROG 1.4.
69

Se ha probado con éxito a programar los siguientes PICs:
16F627, 16F628.
16C84, 16F83, 16F84.
16F873, 16F874, 16F876, 16F877.
18F242, 18F252, 18F258, 18F442, 18F452, 18F458.
Y, al menos en teoría (no los he probado) debería funcionar
correctamente con los siguientes:
16C62, 16C63, 16C64, 16C65, 16C66, 16C67.
16C71, 16C72, 16C73, 16C74, 16C75, 16C76, 16C77, 16C715.
16C620, 16C621, 16C622, 16C623, 16C624, 16C625.
16F870, 16F871, 16F872.
16C923, 16C924.
Teniendo en cuenta el costo en tiempo y dinero que requiere la
construcción de este programador, no se puede pedir más.
Sin entrar en detalles sobre el funcionamiento del circuito, decir sólo que se
basa en principios muy parecidos a los del JDM2, pero con ciertos retoques en la
temporización y la estabilidad de las señales. En este caso, se utiliza como alimentación de
+5V el condensador C2, que se carga mediante D2, D3 y D4 en los momentos en que las
señales DTR, RTS y TXD del puerto serie son negativas, y su tensión queda estabilizada
mediante D7. D5 fija la tensión de programación en 12V y D6 limita la tensión de la señal
CLOCK a 5V.
70

Figura 3.1
Realización práctica.
El diseño final aparece en la figura 3.2. El trazado se ha hecho sobre un
grid de una décima de pulgada para que se pueda construir sobre una placa board. La
construcción de este circuito es bastante simple, así que sólo queda aclarar que el conector
CON1 es de los que se utilizan para fabricar cables serie, y se debe montar de forma que la
placa encaje entre sus dos filas de patitas, quedando cinco patitas en la cara de cobre y 4 en
la cara de componentes (ver figuras 3 y 4).
71

Figura 3.2
Figu
ra 3.3
72

Figu
ra 3.4
Para conectar el programador al PC hará falta también un cable serie
transparente (cableado pin a pin) que tenga cableados al menos los pines que se
indican en la figura 3.5. Este cable se puede fabricar o comprarlo ya hecho (es el
tipo de cable que se utiliza para conectar un modem al PC).
Figu
ra 3.5
73

Utilización. Lo primero que hay que tener claro a la hora de utilizar este
programador es el orden en que se deben hacer las cosas para no estropear ni el
programador, ni el PIC, ni el puerto serie del PC. Siempre que queramos insertar o
extraer un PIC del zócalo hay que desconectar el programador del puerto serie,
ya que, al extraer la alimentación del puerto serie, mientras esté conectado estará
alimentado. Por tanto, el proceso a seguir consta de los siguientes pasos:
1º.-Con el programador desconectado insertar el PIC en el zócalo en la
posición correcta (figura 6).
2º.-Conectar el programador al cable que viene del puerto serie del PC.
3º.-Llevar a cabo las operaciones de grabación o lectura necesarias.
4º.-Desconectar el programador del cable que viene del puerto serie del PC.
5º.-Extraer el PIC del zócalo.
Figu
ra 3.6
Como software de grabación recomiendo ICPROG 1.05A, que ha sido
probado y funciona perfectamente con este programador. Se puede bajar de su
website. Una vez instalado, en el menú SETTINGS – OPTIONS, en la sección
LANGUAGE elegimos ESPAÑOL. A continuación, en el menú AJUSTES
escogemos TIPO HARDWARE (se puede hacer directamente pulsando F3) y
aparece la ventana de la figura 3.7. Todas las opciones deben quedar como en la
figura 3.7, salvo el puerto, en el que habrá que marcar el que hayamos utilizado, pulsando
OK para finalizar.
74

Figu
ra 3.7
Existe una prestación en este software que permite ver la posición en la
que habría que insertar el PIC en el zócalo, pero sólo es válida para el JDM
original, así que no hagáis caso de ella. Sólo queda seleccionar el modelo de PIC
que vamos a grabar o leer, y llevar a cabo las acciones deseadas. El programa
trabaja igual con ficheros .BIN ó .HEX. Para grabar un PIC, abrimos el fichero
mediante el menú ARCHIVO y seleccionamos PROGRAMAR TODO en el menú
COMANDO (o pulsamos F5). Para leer un PIC, seleccionamos LEER TODO en el
menú COMANDO (o pulsamos F8) y luego podemos salvarlo a un fichero
mediante el menú ARCHIVO. En la página de ICPROG hay instrucciones sobre el
programa.
PROGRAMADOR TIPO IN-CIRCUIT JDM
Presentamos ahora, el popular programador in-circuit, llamado JDM; que es
compatible con el popular programa para programar pics de la webb llamado IC-
PROG, este puede programar el nuevo y economico procesador tipo pic 16F628 y
75

ahora se esta usando mucho, parece que rapidamente desplazara a su antecesor;
PIC16F84A. Se diseñó sobre un circuito impreso de 2x4 cm. con el programa
tango.pcb, lo usaremos en nuestras practicas del curso de procesadores y sera
herramienta de desarrollo para el grupo Mekatrun en la Universidad Nacional de
Colombia. Apartir de aca, no usaremos mas el popular programa Pony Prog por
considerar JDM mucho mejor, sin embargo es compatible con el programador in-
circuit de pony-prog, ademas es mas pequeño funciona mejor y hace un mejor uso
de la energia del puerto serial de tu PC.
Estas son vistas del programador JDM tipo in-circuit tiene cinco pines que se
insertan en tu protoboard para programar cualquier PIC debes cablear los pines
VPP,VCC,GND,RB7,RB6. y !...............listo..................!
76

Para que el programa IC-PROG lo pueda detectar, se debe configurar el
hardware asi como muestra el grafico siguiente (invierte Vcc).
Se debe construir un cable para el puerto serial, de la forma que muestra la
figura siguiente; note que la resistencia de 2.2K se ha instalado sobre el mismo
conector; esto permite ahorrar un hilo y poder usar un popular y economico cable
telefonico de cuatro hilos, con su respectivos conectores tipo RJ-11 para circuito
impreso y cable.
77

Este es el diseño electronico; en el se realizo una modificacion en algunas
componentes del diseño original, para mejorar su desempeño. los diodos 1N4148
se remplazaron por diodos tipo shottky que presentan una caida de tension directa
menor y se le puede robar mas energía al puerto serial de su P.C.
78

Dos transistores son 2N2222,
Zener de 5.1/0.5W
Zener de 8.2/0.5W
Condensador de 100uF/16v y otro de 100uF/6.3v
Resistencia de 10k y de 2.2k , 1/8W.
Cuatro diodos tipo shottky de pequeña señal
El circuito impreso presenta este aspecto y asi como indica el grafico debe
cablearse en el protoboard, te sirve para muchos pics tipo flash o inclusive los que
no lo son, si se cablean los cinco pines; RB7,RB6,Vcc,Gnd,Vpp.
Las uniones de superficie conectan pistas por el lado de las soldaduras, las
puedes obtener de unidades de diskette malas. o circuitos de desecho que tengan
componentes de montaje superficial.
79

CAPITULO 4.- DESARROLLO DE CIRCUITOS
En este capitulo abordaremos el tema del desarrollo de varios circuitos
prácticos basados en el uso del microcontrolador PIC16F84.
4.1.- DESARROLLO DE UN DETECTOR DE RUIDO DE ALTA FRECUENCIA DE BAJO COSTE BASADO EN EL MICROCONTROLADOR PIC16F84.
RUIDO DE ALTA FRECUENCIA.
Señal no deseada presente en la onda de tensión del terminal de
alimentación.
Las frecuencias a las que afecta son superiores a la del armónico 50 de la
señal fundamental (2500 o 3000 Hz).
CAUSAS:
–ASDs, PWMs, convertidores y conmutadores de señal .
–Otros.
EFECTOS:
–Errores de comunicación y control.
–Problemas con equipos sensibles: ordenadores, sensores, etc.
OBJETIVO:
80

Diseñar y construir un detector de ruido de alta frecuencia que permita:
Medir y detectar una presencia de ruido de al menos el 40% de la señal
fundamental.
Seleccionar el nivel de ruido máximo para realizar la detección.
Seleccionar la banda de frecuencias en la que se mide y detecta el ruido.
DECISIONES:
Selección de las bandas de estudio:
Filtro de capacidades conmutadas.
Selección del umbral de detección:
Tensión de referencia ajustable.
Presentación de medida y modo de trabajo:
Pantalla de cristal líquido.
PARA EL HARDWARE USAREMOS:
FILTRO MF10.-
81

Filtro de capacidades conmutadas de frecuencia de corte proporcional a la
frecuencia de reloj.
Permite configuración paso alto.
Máximo 4º orden.
Frecuencia máxima de corte 20kHz para una frecuencia máxima de reloj de
1MHz.
Banda de trabajo mínima hasta 200kHz.
Bajo precio.
SELECCIÓN Y GENERACIÓN DE FRECUENCIAS.
Selección mediante un interruptor binario triple.
Desestimación del microcontrolador como generador.
Circuito oscilador con cristal e inversor.
Subfrecuencias con contador y multiplexor.
Nota: Buffer de aislamiento.
82

CIRCUITO DE FRECUENCIA.-
FILTRADO.-
Eliminamos las componentes de baja frecuencia: configuración paso alto.
Su frecuencia de corte es proporcional a la frecuencia seleccionada.
Se diseña con ganancia unidad para mantener el mayor ancho de banda
posible.
Máximo orden (4) mediante dos etapas en cascada, para mayor pendiente
de caída.
Butterworth para banda de paso máximamente plana.
83
22K
12K
2MHz
12K
820pF
4K7
820pF
12K
FRECUENCIA AL FILTRO
1 2
S2
SW DIP-4
1234
8765
12
74'126
E11
D12
O13
E24
D25
O26
GND7
VCC14
E4 13
D412
O411
E310
D39
O3 8
12
1 2
1 2
1 2
74'4040Q1
9
Q27
Q36
Q45
Q5 3
Q62
Q74
Q813
Q912
Q10 14
Q1115
Q121
VCC
16GN
D8
CLR11
CLK10
74'151
I17005
I04
I13
I22
I31
I415
I514
I613
I712
S011
S110
S29
E7
VCC
16GN
D8
Z5
/Z6
1 2
12
74'04
I11
O12
I23
O24
I35
O36
GND
7
VCC
14
I613
O612
I511
O510
I49
O48
VCC+
VCC+
FREC
VCC+
RB6
RB7
VCC+
RB2
RB5
VCC+

UMBRAL.-
Generación mediante un divisor con un potenciómetro variable.
Selección de precisión mediante un interruptor de dos posiciones:
Rango hasta 20%.
Rango hasta 50%.
CONEXIONADO DEL MICROCONTROLADOR-
84

PLACAS DE CIRCUITO IMPRESO.-
SOFTWARE.-
EL PROGRAMA:
Limitado a 1k de memoria.
Tareas:
Controlar y leer el ADC.
Leer la selección de frecuencia.
Permitir y atender la interrupción.
Tratar los datos.
Controlar el LCD y mostrar los datos.
85

EL CIRCUITO Y UN EJEMPLO DE DETECCIÓN.-
LINEAS FUTURAS DE ACCION.-
Bajar los límites de detección y eliminar el error para porcentajes de ruido
menores del 8%:
Amplificación antes de la conversión.
Ganancia mayor de filtrado (menor ancho).
Adaptar para terminales trifásicos.
Comunicación con el PC.
Mejorar prestaciones:
Filtro más potente (LTC1068, LMF100).
Microcontrolador más avanzado (PIC16F87,...).
86

4.2.- DESARROLLO DE UN CIRCUITO PARA PWM
En esta sección hablaremos sobre PWM y sus antecedentes básicos para una mejor comprensión.
Con PAM, las muestras de una señal mensaje son utilizadas para modular la
amplitud de un tren de pulsos. El resultado es una señal consistente en pulsos de
ancho constante regularmente espaciados, cuyas amplitudes varían en proporción
a la señal mensaje. (Figura 1(a)).
Otro tipo de modulación de pulsos es la modulación por tiempo de pulsos
(PTM). Con PTM, las muestras de la señal mensaje son utilizadas para variar un
parámetro de la sincronización de los pulsos (un parámetro directamente
relacionado con el tiempo, tal como la duración o la posición de los pulsos).
Un parámetro de tiempo que puede variarse es la duración o ancho del
pulso. Con PWM (o PDM) las muestras de la señal mensaje son utilizadas para
modular el ancho o duración del pulso. El resultado es la señal consistente de
pulsos de amplitud constante cuyo ancho varia en proporción a la señal mensaje
(ver Figura 1(b)). PWM también es llamada modulación por duración de pulsos:
PDM.
87

La posición de los pulsos es otro parámetro de tiempo que puede ser
utilizado en PTM. Con PPM, las muestras de la señal mensaje se utilizan para
modular las posiciones de pulsos de ancho y amplitud constantes (ver Figura 1(c)).
PWM y PPM están estrechamente relacionadas. Las señales PPM son
usualmente generadas a partir de señales PWM como lo muestra la Figura 1(b) y
(c).
La señales PTM tienen algunas características en común con señales PAM.
Ambas requieren que la tasa de muestreo sea más grande que la tasa Nyquist.
Aunque los espectros de señales PTM son complejos, estos contienen el espectro
de la señal mensaje origina, tal como las señales PAM.
88

Sin embargo, hay importantes diferencias entre señales PTM y señales PAM.
La información en las señales PTM es llevada en el sincronismo de los pulsos (en
las posiciones de los flancos de los pulsos), en lugar de las amplitudes como en
PAM. Cuando el ancho de banda de canal es grande, los flancos de los pulsos son
casi verticales. Como resultado de esto, las señales PTM son menos sensitivas al
ruido que las señales PAM. Reduciendo el ancho de banda del canal se
incrementa el tiempo de subida (Tr) de los pulsos y el ruido tiene efecto en la
precisión del sincronismo de los pulsos.
PWM se utiliza a menudo donde se requiere un control remoto proporcional a
una posición. El valor promedio de señales PWM varia directamente con la señal
mensaje y puede, por ejemplo, ser usado para controlar la velocidad de un motor.
Debido a que los pulsos en señales PPM pueden ser muy estrechos, y por lo
tanto se requiere muy baja potencia para transmitirlos, la transmisión PPM puede
ser muy eficiente. PPM es frecuentemente utilizada en sistemas ópticos de
comunicación.
La Figura 2 muestra la forma de generar señales PWM y PPT. La Figura 2
(b) muestra las formas de onda en el generador PWM/PPM.
La señal mensaje es comparada con una señal rampa (señal de muestreo)
para producir la salida PWM. Si el nivel de voltaje de la señal mensaje es mayor
que el de la señal rampa, la salida del comparador es alta (TTL, 5V). Si la señal
mensaje es menor que la señal rampa, la salida del comparador es baja (TTL, 0V).
La salida del comparador es por tanto una señal PWM, puesto que el ancho de los
pulsos depende del nivel de la señal mensaje.
La señal PWM es aplicada a un circuito generador de pulsos, el cual general
un pulso de ancho y amplitud fijos con cada flanco de caída de los pulsos de la
señal PWM. La salida del generador de pulsos es por tanto la señal PPM, puesto
89

que la posición de los pulsos con respecto a una señal de reloj (una señal
cuadrada de igual frecuencia que la señal rampa) depende del nivel de la señal
mensaje.
Tanto PWM como PPM pueden ser demoduladas directamente utilizando un
filtro pasabajo, como se muestra en la Figura 3 (a). Sin embargo, el filtro es
incapaz de detectar el sincronismo de los pulsos y por lo tanto promedia la señal
con ruido incluido, para demodularla. Por lo tanto, antes del filtrar se suele utilizar
un limitador que reconstruye los pulsos; así la demodulación es más eficaz (ver
Figura 3(b)).
90

Las señales PPM demoduladas sólo por filtrado pasabajo, pueden producir
una señal reconstruida de muy baja amplitud, si los pulsos son muy estrechos.
Por tanto, se suele recuperar el sincronismo antes del filtrado, como se ve en
la Figura 3(c). El biestable (FLIP-FLOP) entrega una señal PWM la cual es
demodulada según se dijo anteriormente.
91
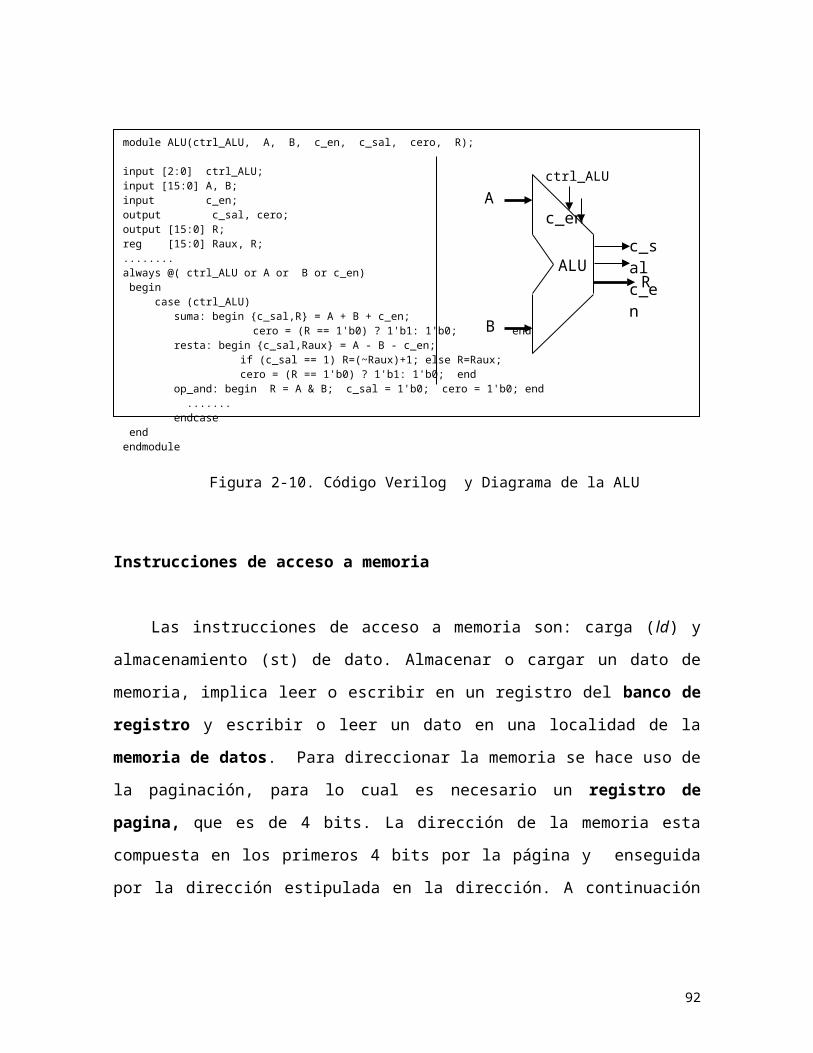
La Figura 4, finalmente muestra las señales en un receptor PPM.
4.3.- PROYECTOS CON EL PIC 16F84
Si bien el clásico de todos los tiempos es el PONG, el TETRIS es clásico,
pero es contemporáneo al mismo tiempo. Hoy día se lo puede encontrar en
versiones 3D para potentes PC's, versiones para Macintosh, reducidas versiones
para Palm Pilots e incluso en sistemas del tipo GameBoy. Todo un pionero de la
multiplataforma.
92
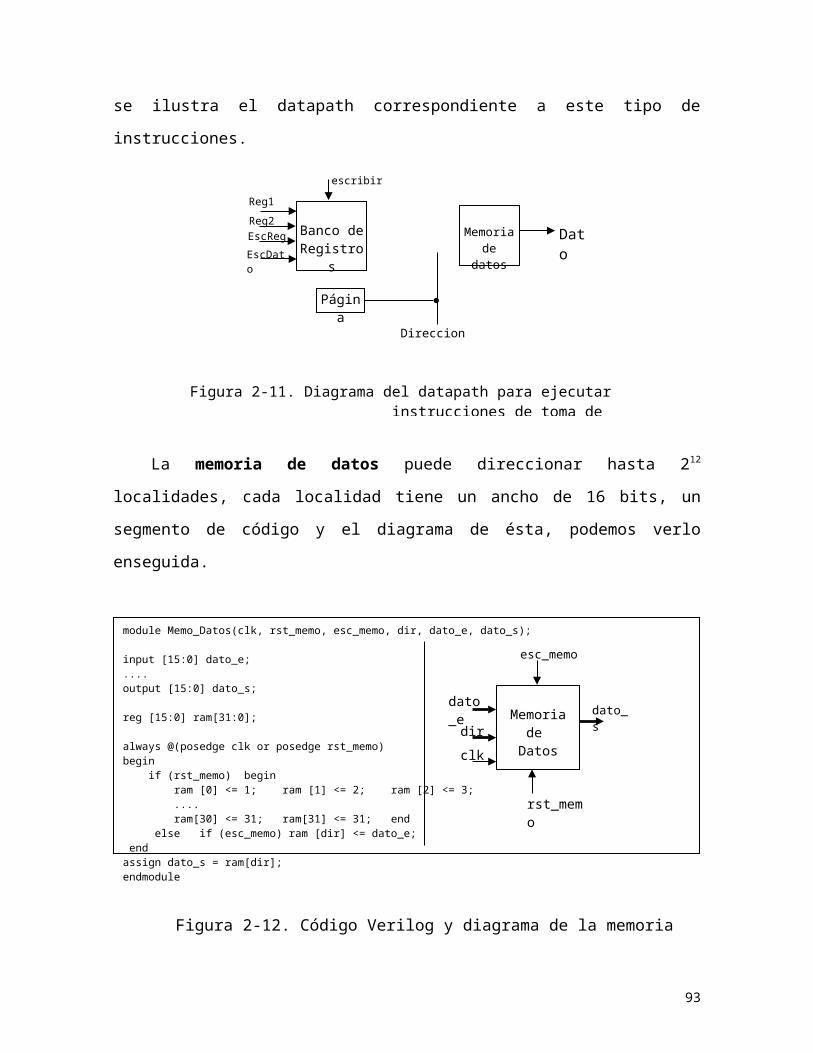
El juego funciona en un PIC16F84 a 12MHz, generando el vídeo en tiempo
real con sólo dos resistencias. La única diferencia electrónica, comparado con el
PONG, es que PONG puede correr en un µC PIC16C84, pero TETRIS requiere
mas memoria RAM (68 bytes, adicionales a los disponibles) por lo que sólo
funciona en un µC PIC16F84. EL circuito electrónico en si es el mismo, por lo que
puede emplearse la misma placa que para el PONG. El joystick 2 no actual en
este juego.
El juego es muy simple. Es posible desplazar el bloque hacia los costados
usando para ello las teclas IZQUIERDA y DERECHA, puede hacer caer el bloque
bruscamente presionando la tecla ABAJO. Presionando el botón FUEGO hará
rotar el bloque. Los bloques están cayendo todo el tiempo, primero parece lento,
pero, mientras pasa el tiempo de juego, la velocidad de caída de los bloques se
acelera. Y la música se acelera al ritmo de los bloques, SI!!!, escucho bien, hay
música en el juego !, pero no espere gran cosa, porque no hay tanto tiempo de
CPU para dedicar al sonido. Un amigo, Carl Henrik Grunditz, me ha ayudado
93

mucho con el audio del juego. Actualmente él está pensando hacer el juego
"Boulder Dash" con la misma electrónica del tetris y el pong. La música es una
vieja melodía Rusa llamada "Karaboschka", que es una de las que sonaban en el
tetris del gameboy.
El puntaje es mostrado en el ángulo inferior derecho de la pantalla, y el
próximo bloque que vendrá se ve en el ángulo superior izquierdo. Sólo es posible
obtener 999 puntos, luego de ello el juego termina. Es posible que hayan algunos
"bugs" en el sistema, pero los iremos corrigiendo al tiempo.
list p=16F84,r=hex
w equ 0
f equ 1
pcl equ 0x02
status equ 0x03
porta equ 0x05
portb equ 0x06
indf equ 0x00
fsr equ 0x04
eedata equ 0x08
eeadr equ 0x09
eecon1 equ 0x08
rd equ 0
rp0 equ 5
startspeed equ 0x18
movespeedequ 0x06
94
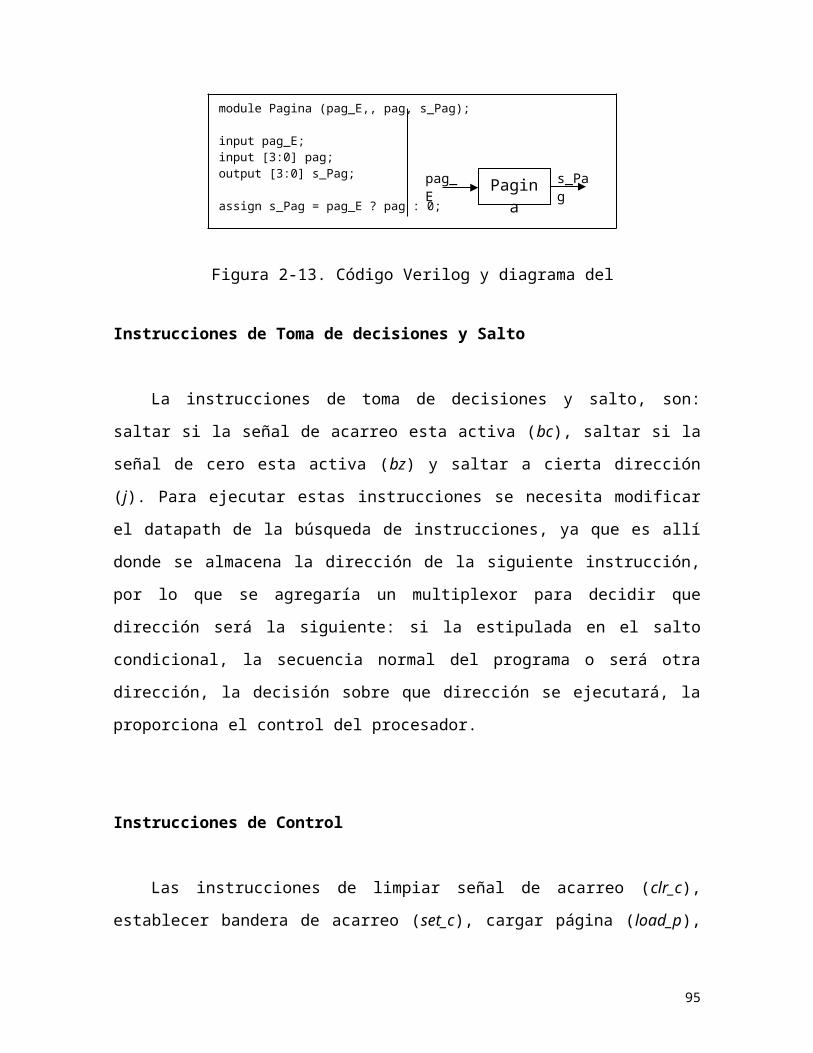
up1b equ 3
down1b equ 2
left1b equ 5
right1b equ 4
fire1b equ 1
up2b equ 7
down2b equ 6
left2b equ 2
right2b equ 3
fire2b equ 1
up1p equ portb
down1p equ portb
left1p equ portb
right1p equ portb
fire1p equ portb
up2p equ portb
down2p equ portb
left2p equ porta
right2p equ porta
fire2p equ porta
counter0 equ 0x0C
counter1 equ 0x0D
counter2 equ 0x0E
counter3 equ 0x0F
nextblocktyp equ 0x10
blockx equ 0x11
blocky equ 0x12
blocktyp equ 0x13
line equ 0x14
x equ 0x15
95

y equ 0x16
delaycnt equ 0x17
angle equ 0x18
blockstuff equ 0x19
fallcnt equ 0x1A
points equ 0x1B
random equ 0x1E
stuff equ 0x1F
m_freq equ 0x20
m_cnt equ 0x21
m_songcnt equ 0x22
buffer equ 0x24
currbl equ 0x44
x0 equ 0x4C
y0 equ 0x4D
movecnt equ 0x4E
remline equ 0x4F
hsfall equ 0
rotate equ 1
goleft equ 2
goright equ 3
drop equ 4
rotat equ 5
gameover equ 5
delay MACRO
LOCAL label
movwf delaycnt
label decfsz delaycnt
goto label
96

ENDM
dnop MACRO
LOCAL label
label goto label+1
ENDM
org 0x000
goto inittetris
;------------ This table contains the 3 note lengthes for the 5 speeds --------
getlength addwf pcl
retlw 0x0B
retlw 0x16
retlw 0x1D
retlw 0x09
retlw 0x12
retlw 0x19
retlw 0x07
retlw 0x0D
retlw 0x11
retlw 0x04
retlw 0x08
retlw 0x0C
retlw 0x02
retlw 0x04
retlw 0x06
;------------------------ set bit in the gamefield ----------------------------
97
setbit call getbit ;get bitbyte and bitmask 20 cycles
iorwf indf ;set bit
return
;----------------------- clear bit in the gamefield ---------------------------
clrbit call getbit ;get bitbyte and bitmask 21 cycles
xorlw 0xff ;invert bitmask
andwf indf ;clear bit
return
;-------------------- point at byte, and return bitmask -----------------------
getbit movlw buffer ;15 cycles
btfsc x,3
movlw buffer+1
clrc
rlf y
addwf y,w
movwffsr ;fsr = 2*y + x<
Contador de 4 dígitos con PIC
Quizás una de las aplicaciones mas usual para un micro controlador sea la
elaboración de un contador de turnos o de personas atendidas. En este caso
decidimos diseñar un circuito que requiera la menor cantidad posible de
componentes y que cumpla con las prestaciones típicas de estas aplicaciones.
98

Como se ve en el diagrama el circuito está estructurado alrededor del
PICmicro el cual en su interior lleva la cuenta de las pulsaciones sobre el pulsador
'I' y, a su vez, genera los dígitos a ser mostrados sobre los displays de 7
segmentos de LED's.
Para reducir la cantidad de circuitos integrados a sólo uno hemos optado por
generar los dígitos por soft dentro del mismo micro, evitando así tener que recurrir
a decodificadores de BCD, que si bien no representan costo alguno para
adquirirlos, el hecho de colocarlos en el circuito impreso implica mayor tamaño,
mayor cantidad de pistas y perforaciones.
El funcionamiento es por demás simple. Los cuatro dígitos del display se
encuentran en paralelo. Esto significa que el segmento A del primero está
cableado junto con el del segundo, el tercero y el cuarto. Y lo mismo sucede con
los demás segmentos. Para que no se encienda sobre los cuatro dígitos el mismo
número se multiplexa el encendido por medio de los cuatro transistores. Para que
el display se ilumine no solo tiene que haber un uno lógico en el segmento a
encender, sino que también se requiere que el transistor este en conducción para
lograr la masa. De esta forma, conmutando los transistores secuencialmente y a
velocidad suficiente se logra hacer parecer al ojo humano que los cuatro displays
99
están iluminados simultáneamente, cuando en realidad sólo uno se ilumina por
vez. Por ejemplo, para hacer aparecer en los displays la secuencia 1 2 3 4 habría
que hacer la siguiente rutina:
1. Generar el dígito 1
2. Encender el primer display
3. Generar el dígito 2
4. Encender el segundo display
5. Generar el dígito 3
6. Encender el tercer display
7. Generar el dígito 4
8. Encender el cuarto display
9. Repetir la secuencia a velocidad suficiente.
Esto es el concepto básico. Para entender mejor el sistema será necesario
consultar el archivo en assembler que contiene el código fuente del programa a
cargar en el micro, que lo puede obtener del link de mas abajo.
Para evitar que la velocidad del micro haga avanzar el conteo a mas de una
unidad por pulsación se ha implementado un retardo de 100mS luego de la
pulsación del interruptor marcado como 'I'. Si se quiere hacer avanzar el conteo
hasta una posición no es necesario presionar y soltar el pulsador repetitivamente,
bastará con mantenerlo presionado y el conteo avanzará rápidamente. Para volver
la cuenta a cero basta con resetear el micro, presionando la tecla marcada como
'R'.
Si bien nosotros empleamos un cristal de 4MHz para el generador de reloj,
también se puede emplear una red RC, porque en este proyecto no se requiere
gran precisión de clock.
100

Los transistores pueden ser reemplazados sin problema por cualquiera de
uso general como el BC548 o similar.
Los displays utilizados son de LED's con cátodo común. Se pueden emplear
displays pequeños y medianos sin problema. Para el uso de displays grandes
deberá emplear algún driver de corriente como el ULN2803A o similar. La
alimentación puede ser tanto 5 como 6 voltios. No se requiere que esté
estabilizada y se puede emplear un adaptador universal, siempre que sea de
calidad aceptable. La corriente requerida es de 300mA.
;Contador de 4 digitos.
indo equ 00h ;registro de indireccion
pc equ 02h ;contador de programa
status equ 03h ;registro de estado
fsr equ 04h ;registro de seleccion
ptoa equ 05h ;puerto a
ptob equ 06h ;puerto b
rota equ 0fh ;variable para desplazamiento de display
trisa equ 85h ;configuracion puerto a
trisb equ 86h ;configuracion puerto b
dig1 equ 10h ;acumulador miles
dig2 equ 11h ;acumulador centenas
dig3 equ 12h ;acumulador decenas
dig4 equ 13h ;acumulador unidades
loops equ 1dh ;variables usadas en retardos
loops2 equ 1eh
z equ 02h ;flag de cero
ram equ 05h ;bit de seleccion de pagina de memoria
c equ 00h ;flag de acarreo
w equ 00h ;bit de destino a variable de trabajo
101
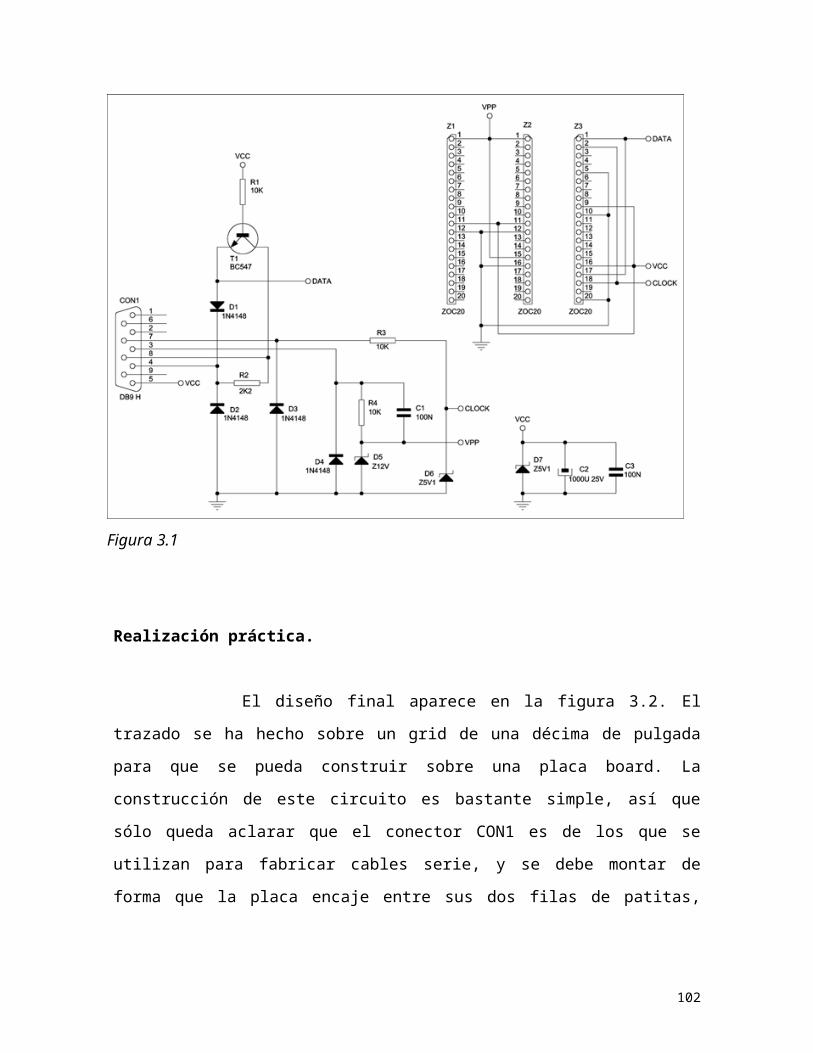
reset org 00
goto inicio
org 05h
retardo ;subrutina de retardo
movwf loops ;la variable de trabajo contiene la cant.
top2 movlw d'110' ;de ms a demorar
movwf loops2
top nop
nop
nop
nop
nop
nop
decfsz loops2 ;controla si termina 1mS
goto top
decfsz loops ;controla si termina el retardo completo
goto top2
retlw 0
s1000 ;rutina de incremento x 1000
clrf dig2 ;pone a cero las centenas
incf dig1 ;incrementa el contador de miles
movf dig1, w ;carga en work el conteo de los miles
xorlw 0ah ;si work era 10, entonces quedara en cero
btfsc status, z ;si es cero, el flag z queda alto
clrf dig1 ;inicializa los miles
return
s100 ;rutina de incremento x 100
clrf dig3 ;pone a cero las decenas
102
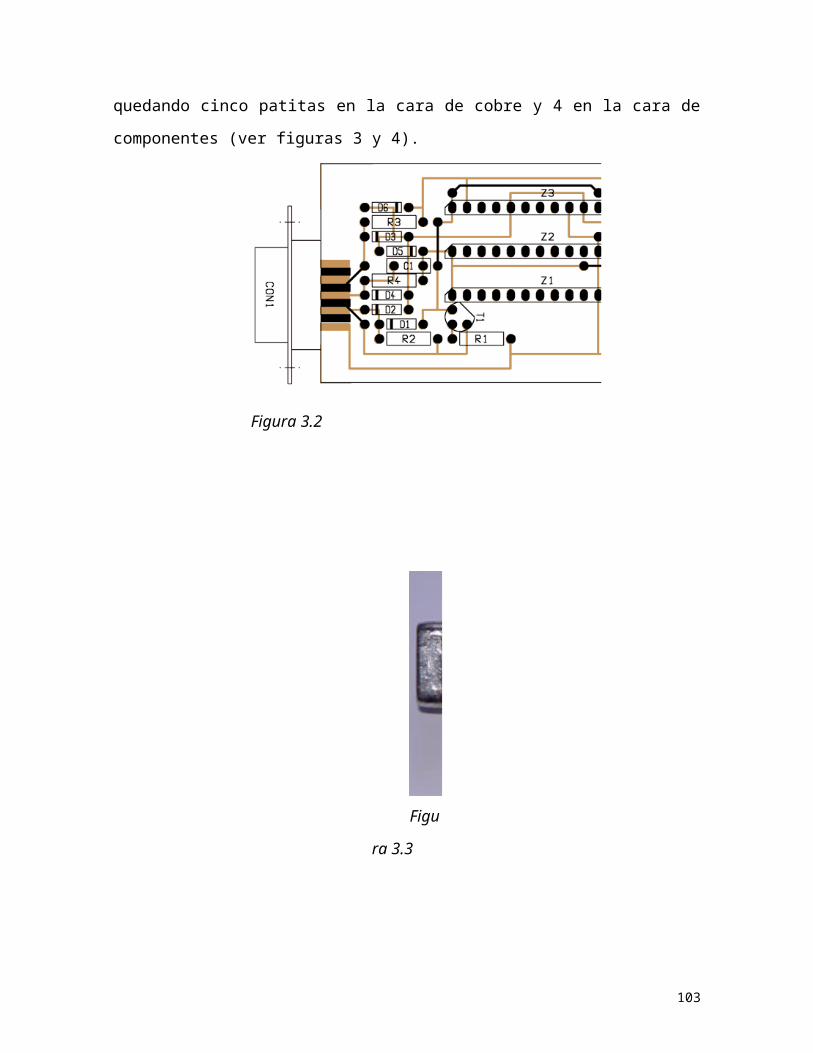
incf dig2 ;incrementa el contador de centenas
movf dig2, w ;carga en work el conteo de las centenas
xorlw 0ah ;si work era 10, entonces quedara en cero
btfsc status, z ;si es cero, el flag z queda alto
call s1000 ;incrementa los miles
return
s10 ;rutina de incremento x 10
clrf dig4 ;pone a cero las unidades
incf dig3 ;incrementa el contador de decenas
movf dig3, w ;carga en work el conteo de las decenas
xorlw 0ah ;si work era 10, entonces quedara en cero
btfsc status, z ;si es cero, el flag z queda alto
call s100 ;incrementa las centenas
return
subir ;rutina de incremento
incf dig4 ;incrementa el contador de unidades
movf dig4, w ;carga en work el conteo de las unidades
xorlw 0ah ;si work era 10, entonces quedara en cero
btfsc status, z ;si es cero, el flag z queda alto
call s10 ;incrementa las decenas
movlw d'250' ;retardo de 100ms
call retardo
return
tabla ;genera los numeros sobre el display
addwf pc ;agrega al cont. programa el valor de work
retlw b'00111111' ;genera el 0
retlw b'00011000' ;genera el 1
retlw b'01110110' ;genera el 2
103

retlw b'01111100' ;genera el 3
retlw b'01011001' ;genera el 4
retlw b'01101101' ;genera el 5
retlw b'01101111' ;genera el 6
retlw b'00111000' ;genera el 7
retlw b'01111111' ;genera el 8
retlw b'01111101' ;genera el 9
inicio ;programa principal
bsf status, ram ;selecciona el banco de memoria alto
movlw b'00010000' ;configura el puerto a
movwf trisa ;bit 4 entrada, demas bits salidas.
movlw 00h ;configura el puerto b
movwf trisb ;como salidas
bcf status, ram ;selecciona el banco de memoria bajo
clrf dig1 ;inicializa acumuladores
clrf dig2
clrf dig3
clrf dig4
movlw 00 ;envia ceros a los transistores para apagar
movwf ptoa ;todos los displays
empe btfss ptoa, 4 ;chequea el pulsador
call subir ;llama la rutina de incremento
movlw 08h ;iniciar un 1 en el registro de rotacion
movwf rota
movlw dig1 ;con el registro selector (fsr) se apunta
movwf fsr ;al primer dato que se va a mostrar
disp movlw 00h ;colocar en cero el dato del display
movwf ptob ;para apagarlos
movf rota, w ;pasa rotacion del 1 a la variable work
104
movwf ptoa ;enciende el transistor (display)
movf indo, w ;lee el dato del registro apuntado por fsr
call tabla ;genera el digito de 7 segmentos
movwf ptob ;envia el digito al puerto b
movlw 03h ;retardo de 3ms para visualizacion
call retardo
btfsc rota, 0 ;controla si terminaron las cuatro rotaciones
goto empe ;si termino, vuelve desde el comienzo
bcf status, c ;carry en cero para no afectar las rotaciones
rrf rota ;desplaza el 1 que enciende los displays
incf fsr ;incrementa el puntero. Apunta el proximo
goto disp ;digito a mostrar
end
105











![PICmicro GAMA MEDIA: PIC16F84 [I]](https://static.fdocuments.ec/doc/165x107/56813b2a550346895da3ee65/picmicro-gama-media-pic16f84-i.jpg)






