El marco de referencia internacional y europeo. El papel ... · criado a partir de uma resoluÇÃo...
121
Junho 11, 2008 Valladolid 1 El marco de referencia internacional y europeo El papel de las estaciones de referencia permanentes João Agria Torres Engº Geógrafo Presentación de la Red de Estaciones GNSS de Castilla y León Valladolid, Miércoles 11 de junio de 2008 Sub-comissão Regional Reference Frames da Associação Internacional de Geodesia Artop, Lda.
Transcript of El marco de referencia internacional y europeo. El papel ... · criado a partir de uma resoluÇÃo...

Junho 11, 2008 Valladolid 1
El marco de referencia internacional y europeo
El papel de las estaciones de referencia permanentes
João Agria Torres
Engº Geógrafo
Presentación de la Red de Estaciones GNSS de Castilla y León
Valladolid, Miércoles 11 de junio de 2008
Sub-comissão Regional Reference Frames da Associação Internacional de Geodesia
Artop, Lda.
Junho 11, 2008 Valladolid 2
CONTEÚDO
88MotivaMotivaççãoão
8Evolução dos sistemas de referência
8Sistemas de referência e referenciais geo-espaciais
8O projecto EUREF
8Adopção dos novos sistemas de geo-referenciação
8Notas finais
Junho 11, 2008 Valladolid 3
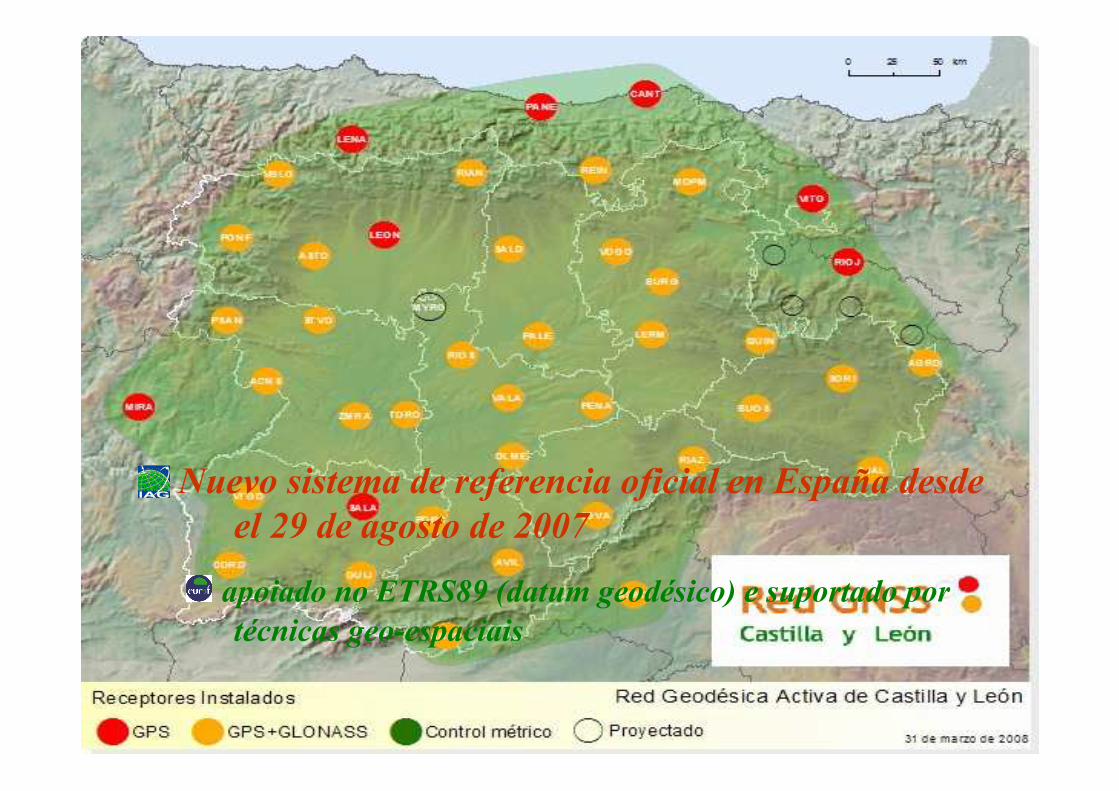
Presentación de la Red de Estaciones GNSS de Castilla y León
una plataforma tecnológica compleja que proporciona la posibilidad de realizar mediciones topográficas de gran precisión apoyándose en sistemas de navegación por satélite (GPS, GLONASS y está preparada para Galileo)
1- Motivação
Nuevo sistema de referencia oficial en España desde el 29 de agosto de 2007
apoiado no ETRS89 (datum geodésico) e suportado por técnicas geo-espaciais
Junho 11, 2008 Valladolid 4
REAL DECRETO 1071/2007, de 27 de julio, por el que se regula el sistema geodésico de referencia oficial en España.
El sistema de referencia ETRS89 (European Terrestrial Reference System 1989), Sistema de Referencia Terrestre Europeo 1989, ligado a la parte estable de la placa continentaleuropea, es consistente con los modernos sistemas de navegación por satélite GPS, GLONASS y el europeo GALILEO. Su origen se remonta a la resolución de 1990 adoptada por EUREF (Subcomisión de la Asociación Internacional de Geodesia, AIG, para el Marco de Referencia Europeo) y trasladada a la Comisión Europea en 1999, por lo que está siendo adoptado sucesivamente por todos los países europeos.
El objeto de este real decreto es la adopción en España del sistema de referencia geodésico global, ETRS89, sustituyendo al sistema geodésico de referencia regional ED50 sobre el que actualmente se está compilando toda la cartografía oficial en el ámbito de la Península Ibérica y las Islas Baleares, y el sistema REGCAN95 en el ámbito de las IslasCanarias, permitiendo una completa integración de la cartografía oficial española con los sistemas de navegación y la cartografía de otros países europeos.
Dado en Palma de Mallorca, el 27 de julio de 2007.JUAN CARLOS R.
1- Motivação

Junho 11, 2008 Valladolid 5
CAPÍTULO IDisposiciones generales y sistemas de referencia
Artículo 1. Objeto.Este real decreto regula el sistema de referencia geodésico sobre el que se debe compilar toda la información geográfica y cartografía oficial, permitiendo una completa integración de la información geográfica y de la cartografía oficial española con la de otros países europeos y com los sistemas de navegación.
Artículo 2. Ámbito subjetivo de aplicación.Este real decreto será de aplicación a la producción cartográfica e información geográfica oficiales referida a todo o parte del territorio español.
Artículo 3. Sistema de Referencia Geodésico.Se adopta el sistema ETRS89 (European Terrestrial Reference System 1989) como sistema de referencia geodésico oficial en España para la referenciación geográfica y cartográfica en el ámbito de la Península Ibérica y las Islas Baleares. En el caso de las Islas Canarias, se adopta el sistema REGCAN95. Ambos sistemas tienen asociado el elipsoide GRS80 y están materializados por el marco que define la Red Geodésica Nacional por Técnicas Espaciales, REGENTE, y sus densificaciones.
1- Motivação

Junho 11, 2008 Valladolid 6
CONTEÚDO
8Motivação
88EvoluEvoluçção dos sistemas de referênciaão dos sistemas de referência
8Sistemas de referência e referenciais geo-espaciais
8O projecto EUREF
8Adopção dos novos sistemas de georreferenciação
8Notas finais
Junho 11, 2008 Valladolid 7
SISTEMAS DE REFERÊNCIA ELIPSOIDAIS
8Concebidos para apoiar o desenvolvimento das Redes Geodésicas
8Sistema de eixos tri-ortogonal directo
8Origem coincidente com o centro do elipsóide de revolução
8Eixos paralelos aos do Sistema Terrestre Convencional definido pelo BIH (Bureau International de l’Heure)
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 8
DATUM GEODÉSICO CLÁSSICO
8Conjunto de parâmetros que define o posicionamento do elipsóide de referência relativamente à Terra, baseado em observações astronómicas
8Estabelecimento de um ponto origem onde são definidos:
8as coordenadas geodésicas (ϕϕϕϕ1G , λλλλ1G)
8os componentes do desvio da vertical (ξξξξ1 , ηηηη1)
8a ondulação do geóide (N1)
8um azimute geodésico (equação de Laplace)
αααα1G = αααα1A - (λλλλ1A - λλλλ1G) sen ϕϕϕϕ
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 9
OS PARÂMETROS DO DATUM
8(ϕϕϕϕ1G , λλλλ1G)fixam uma normal
8(ξξξξ1 , ηηηη1)fixam essa normal relativamente à Terra
8(N1)fixa a separação entre o elipsóide e o geóide
8(equação de Laplace)fixa a orientação
geóide
elipsóide
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 10
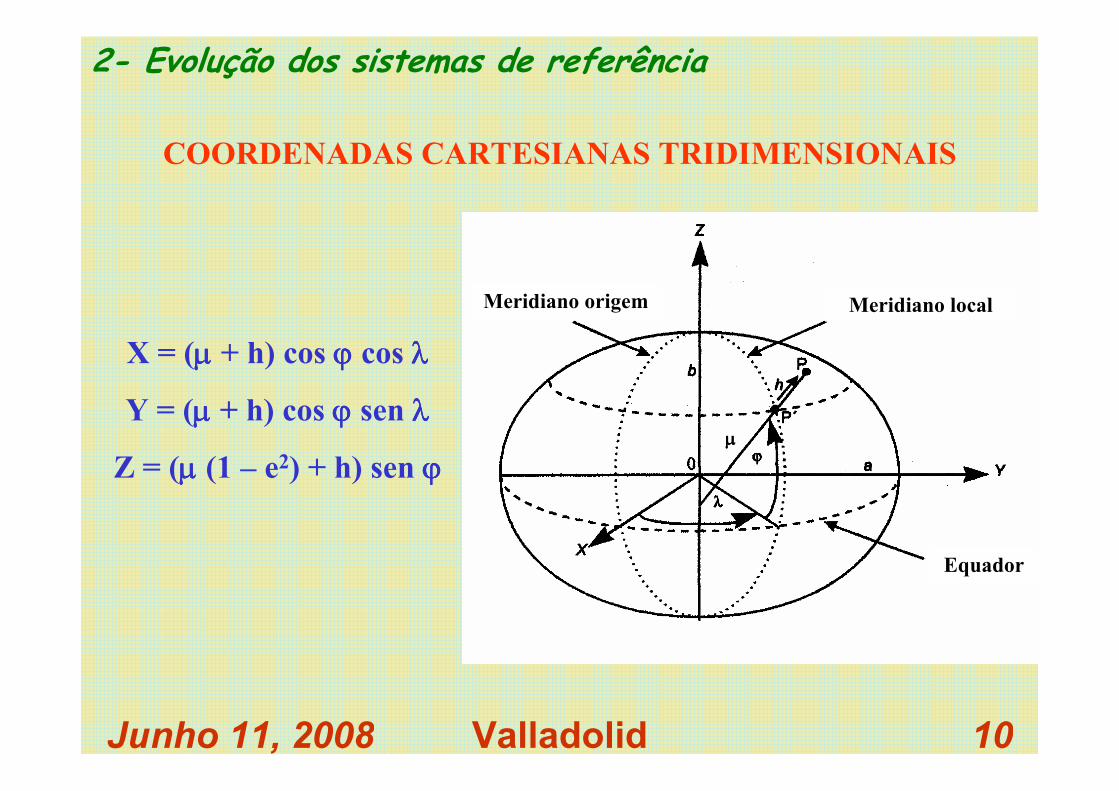
COORDENADAS CARTESIANAS TRIDIMENSIONAIS
X = (µµµµ + h) cos ϕϕϕϕ cos λλλλ
Y = (µµµµ + h) cos ϕϕϕϕ sen λλλλ
Z = (µµµµ (1 – e2) + h) sen ϕϕϕϕ
Meridiano localMeridiano origem
Equador
µµµµ
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 11
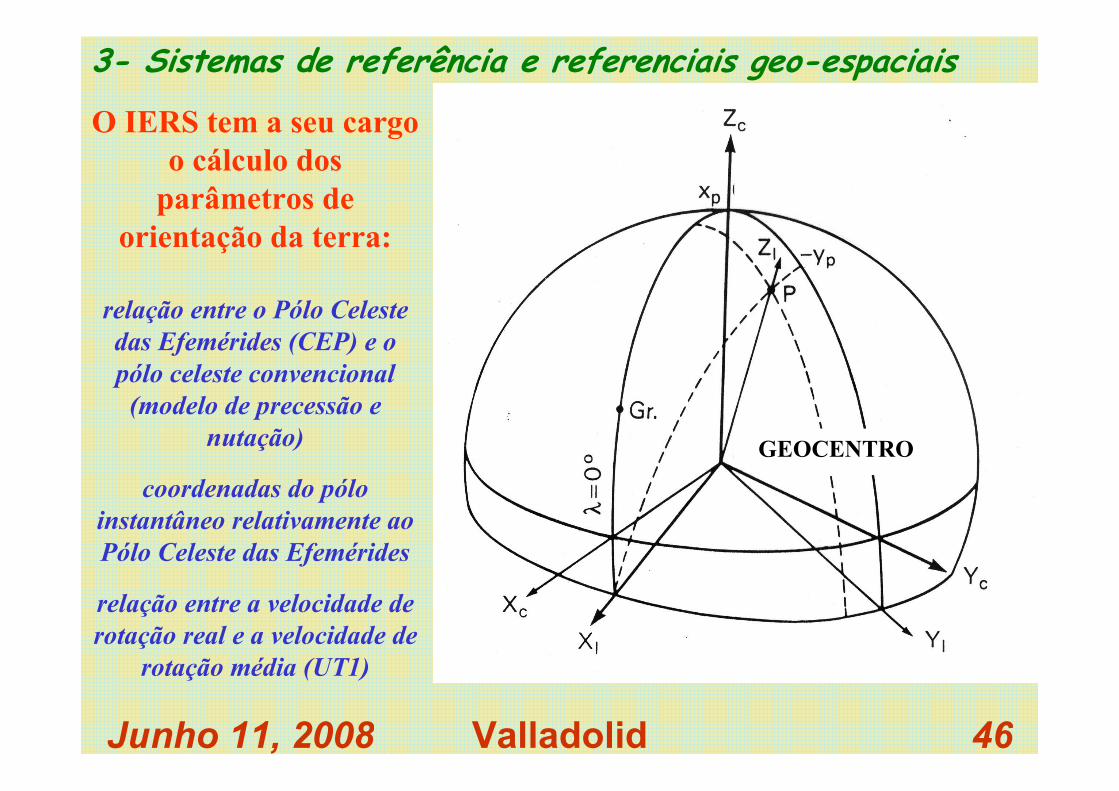
SISTEMA TERRESTRE INSTANTÂNEO (STI)SISTEMA TERRESTRE CONVENCIONAL (STC)
XC = XI + ZI . xp
YC = YI - ZI . xp
ZC = -XI . xp + YI . yp + ZI
xp , yp coordenadas do pólo instantâneo relativamente à CIO definida pelo BIH
GEOCENTRO
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 12
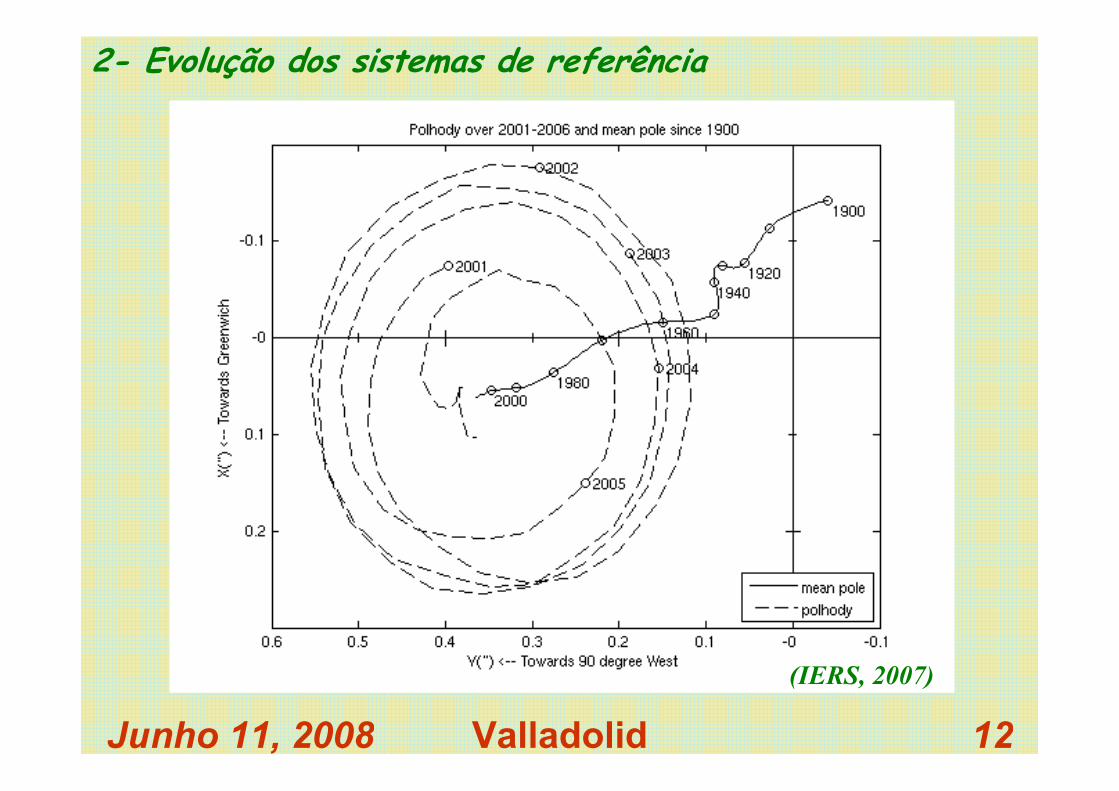
(IERS, 2007)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 13
ADOPÇÃO DO GRS80
8Adoptado na Assembleia Geral de 1979 da Associação Internacional de Geodesia, sucedendo ao GRS67
8Destinado a representar a Terra nos seus aspectos geométricos e dinâmicos e adequado a aplicações nos domínios da geodesia, geofísica e hidrografia
8Sistema de referência oficial para os trabalhos geodésicos
8Baseado na teoria do elipsóide equipotencial
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 14
PROPRIEDADES DO GRS80
8O elipsóide equipotencial é uma superfície equipotencial
U = U0 = constante
8U – potencial gravítico normal
8A função U é determinada sem ambiguidades por 4 parâmetros independentes, qualquer que seja a distribuição de massas:
(a, b) - semi-eixos; M – massa interior; ωωωω - velocidade angular de rotação
8Inclui toda a massa da Terra e da atmosfera
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 15
• Observações de VLBI (Very Long Baseline Interferometry) permitem a monitorização de movimentos de placas
(precisão melhor que 1 cm/5000 km ou 0,002 ppm)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 16
Rede Global VLBI (Very Long Baseline Interferometry)
(http://ivscc.gsfc.nasa.gov/)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 17
ILRS – CONTRIBUTOS
• estudo do sistema Terra sólida - atmosfera – hidrosfera - criosfera
• apoio fundamental aos satélites altimétricos
• contribuição para a monitorização dos níveis do mar e do gelo
• dinâmica a longo prazo da Terra sólida, oceanos e atmosfera
• apoio ao estudo dos movimentos tectónicos
• contribuição para a investigação em Física fundamental
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 18
ILRS – REDE GLOBAL
(http://ilrs.gsfc.nasa.gov/)
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 19
constelação GPS
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 20
GLONASS
• Órbita circular
• Raio médio: 25 500 km
• Altitude média: 19 100 km
• Período orbital: 11h 15m
• 3 planos orbitais
• 8 satélites em cada plano
• Inclinação da órbita: 64.8º
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 21
APLICAÇÕES
�Serviços de posicionamento e navegação
�Manutenção dos referenciais globais ou regionais
�Geodinâmica
�Meteorologia (sub-produto)
�???
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 22
� Componente global: 30 satélites em 3 órbitas, infra-estrutura terrestre
� Componentes regionais: integridade e correcção
� Componentes locais: comercial, sinal adicional ...
� Segmento do utilizador: tipo de receptor e capacidade de serviço
� Centros de serviço: garantia
GALILEO: ESTRUTURA DO SISTEMA
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 23
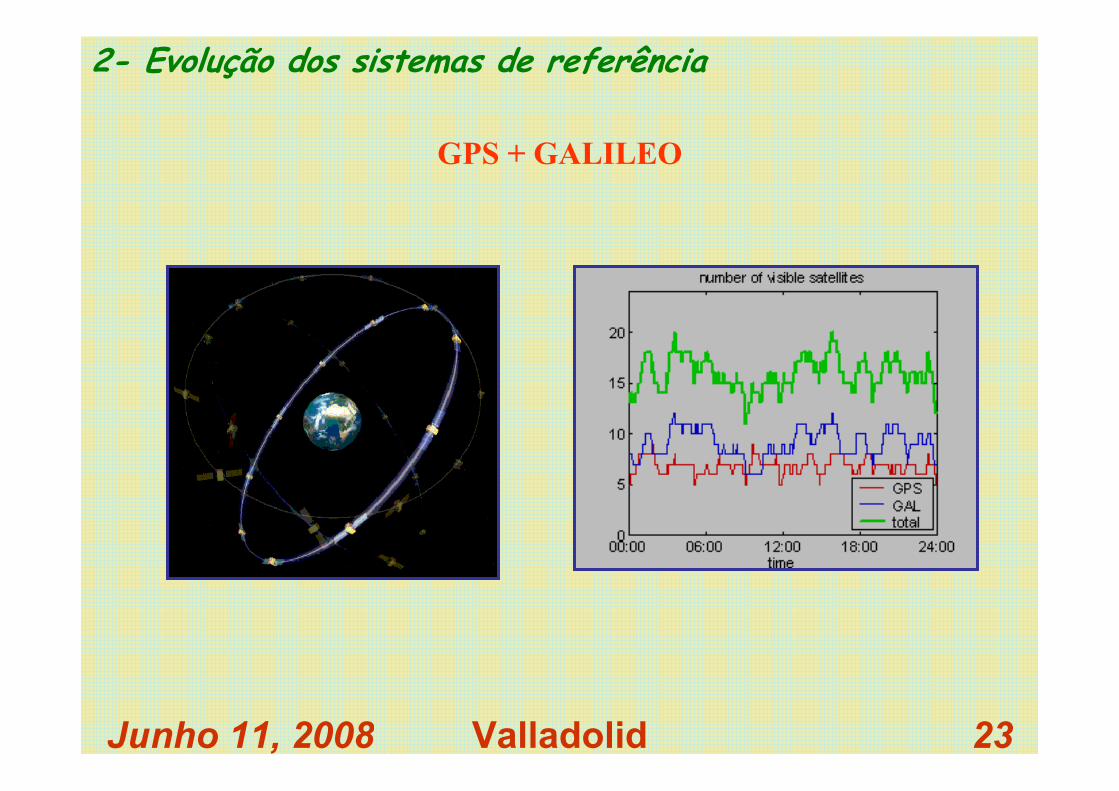
GPS + GALILEO
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 24
CONJUNTO DE ESTAÇÕES GPS PERMANENTES (actualmente mais de 380, algumas inactivas)
IGS - INTERNATIONAL GNSS SERVICE
CRIADO A PARTIR DE UMA RESOLUÇÃO DA UGGI EM 1991 (VIENA)
INÍCIO OFICIAL DAS ACTIVIDADES EM 1994
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 25
IGS – ACTIVIDADES
• contribuição para o IERS e ITRF
•monitorização de deformações da parte sólida da Terra
•monitorização de variações da parte líquida da Terra (nível do mar, placas de gelo, etc.)
• determinação de parâmetros de rotação da Terra
• determinação de órbitas de satélites científicos
•monitorização da ionosfera
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 26
IGS – PRODUTOS
• efemérides dos satélites GPS e GLONASS
• parâmetros de rotação da Terra (EOP)
• coordenadas e velocidades das estações IGS
• informação dos relógios dos satélites GPS e das estações IGS
• estimativas de atraso zenital (zenith path delay) (troposfera)
• estimativas do conteúdo electrónico total (TEC) (ionosfera)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 27
IGS – REDE GLOBAL
(http://igscb.jpl.nasa.gov/)
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 28
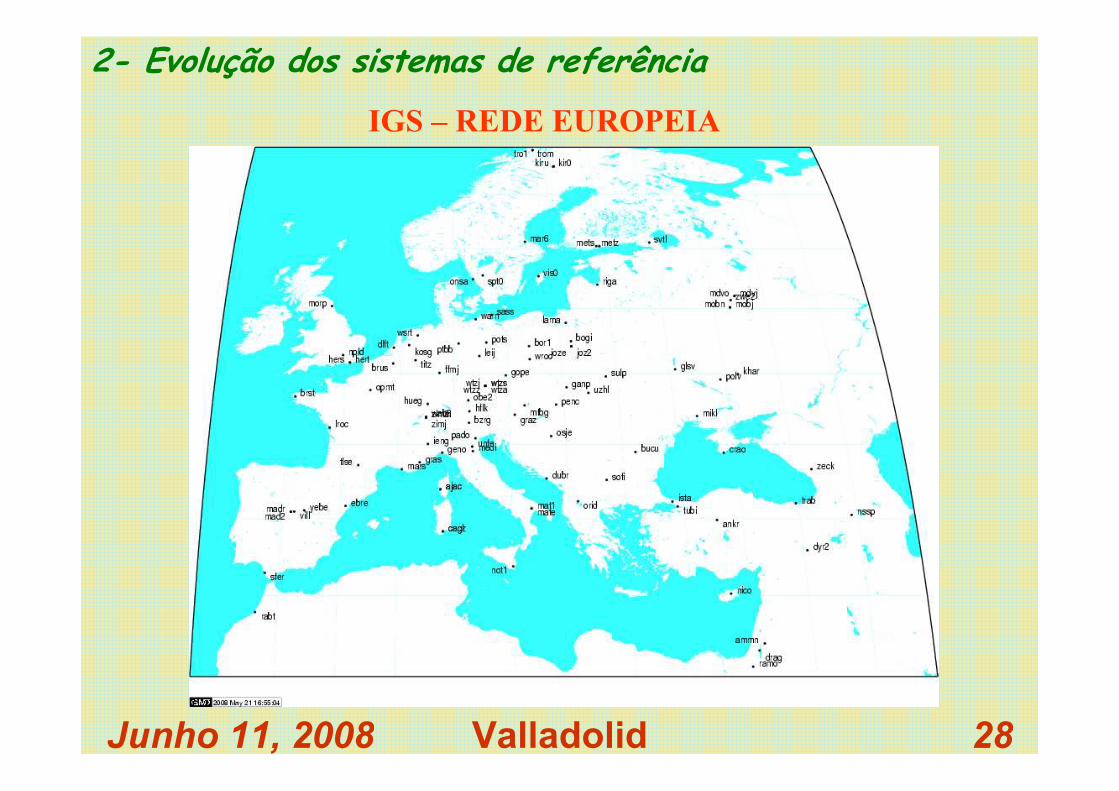
IGS – REDE EUROPEIA
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 29
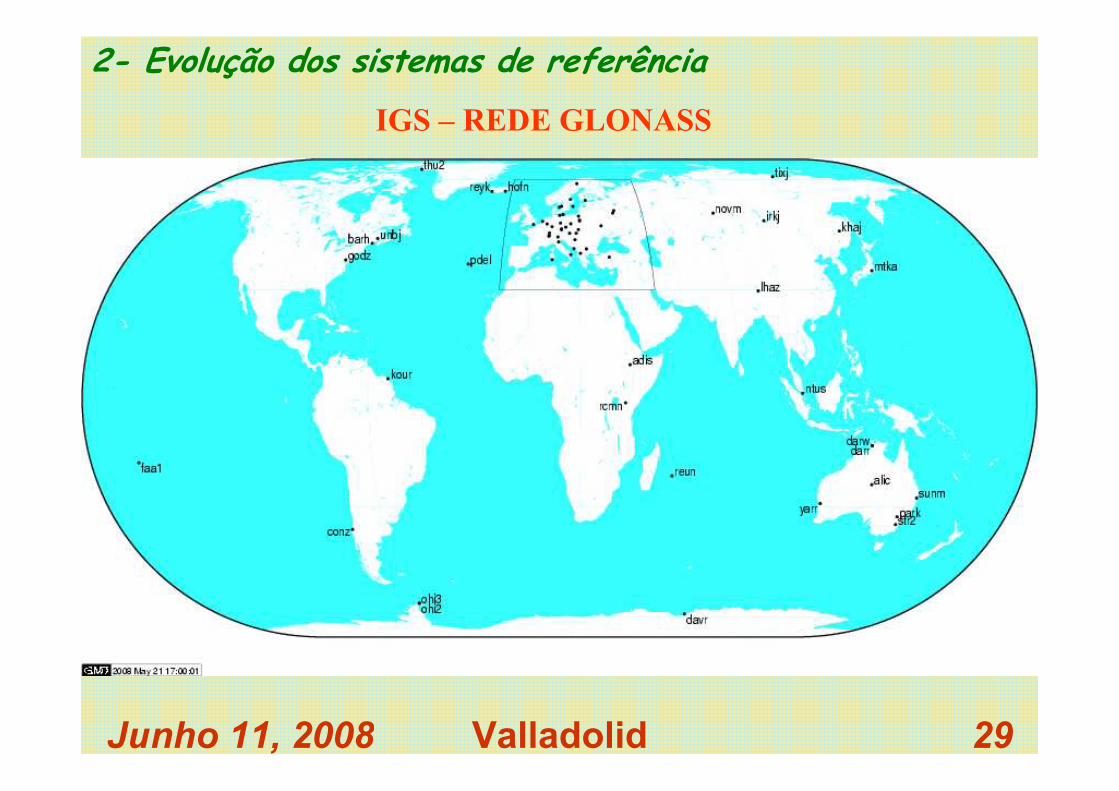
IGS – REDE GLONASS
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 30
O PROBLEMA ALTIMÉTRICO
8O geóide é uma superfície equipotencial do campo gravítico terrestre que em média coincide com o nível médio do mar
8O nível do mar é bastante conveniente para a referenciaçãode altitudes, do ponto de vista prático
8As altitudes são diferenças de potencial entre o geóide e a superfície equipotencial que passa pelo ponto, expressas em números geopotenciais (cP)
cP = W – WP (m2 s-2)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 31
Médias Anuais do Nível do Mar em CASCAIS
y = 0,0012x - 0,0282
-0.080
-0.060
-0.040
-0.020
0.000
0.020
0.040
0.060
0.080
0.100
0.120
0.140
0.160
1882
1885
1888
1891
1894
1897
1900
1903
1906
1909
1912
1915
1918
1921
1924
1927
1930
1933
1936
1939
1942
1945
1948
1951
1954
1957
1960
1963
1966
1969
1972
1975
1978
1981
1984
1987
1990
Anos
Altitudes (m)
Ponto FixoCascais - NP1:
C=13,046 56 u.g.p.
(Helena Kol)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 32
SISTEMAS DE ALTITUDES
• Altitude ortométrica HO = cP / gm
(gm - valor médio da gravidade ao longo da vertical entre o ponto e o geóide)
•Altitude normal HN = cP / γγγγm(γγγγm - valor médio da gravidade normal ao longo da vertical normal entre o
elipsóide e o ponto onde o potencial normal é igual ao potencial real do ponto a calcular)
•Altitude dinâmica HO = cP / g0
(g0 - valor arbitrário da gravidade, em geral correspondente a 450 ou à latitude média da região)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 33
REFERENCIAÇÃO ESPACIAL E VERTICAL
X = (µµµµ + h) cos ϕϕϕϕ cos λλλλ
Y = (µµµµ + h) cos ϕϕϕϕ sen λλλλ
Z = (µµµµ (1 – e2) + h) sen ϕϕϕϕ
Meridiano localMeridiano origem
Equador
µµµµ
h = f(ϕϕϕϕ, λλλλ)
tan λλλλ = Y / X
tan ϕϕϕϕ = (Z / Y) ((µµµµ + h) sen λλλλ) / (µµµµ (1 – e2) + h)
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 34
ONDULAÇÃO DO GEÓIDE
N - ondulação do geóideH - altitude ortométricah – altitude elipsoidal
elipsóide
geóide
Superfície terrestre
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 35
• Missão Topex/Poseidon (altimetria dos oceanos)
(CNES/NASA)
• Lançado em 1992.08.10
• Terminado em 2006.01.16
• Radar altimétrico de altafrequência (1700 Hz)
• Precisão de cerca 2 cm
2- Evolução dos sistemas de referência
Junho 11, 2008 Valladolid 36
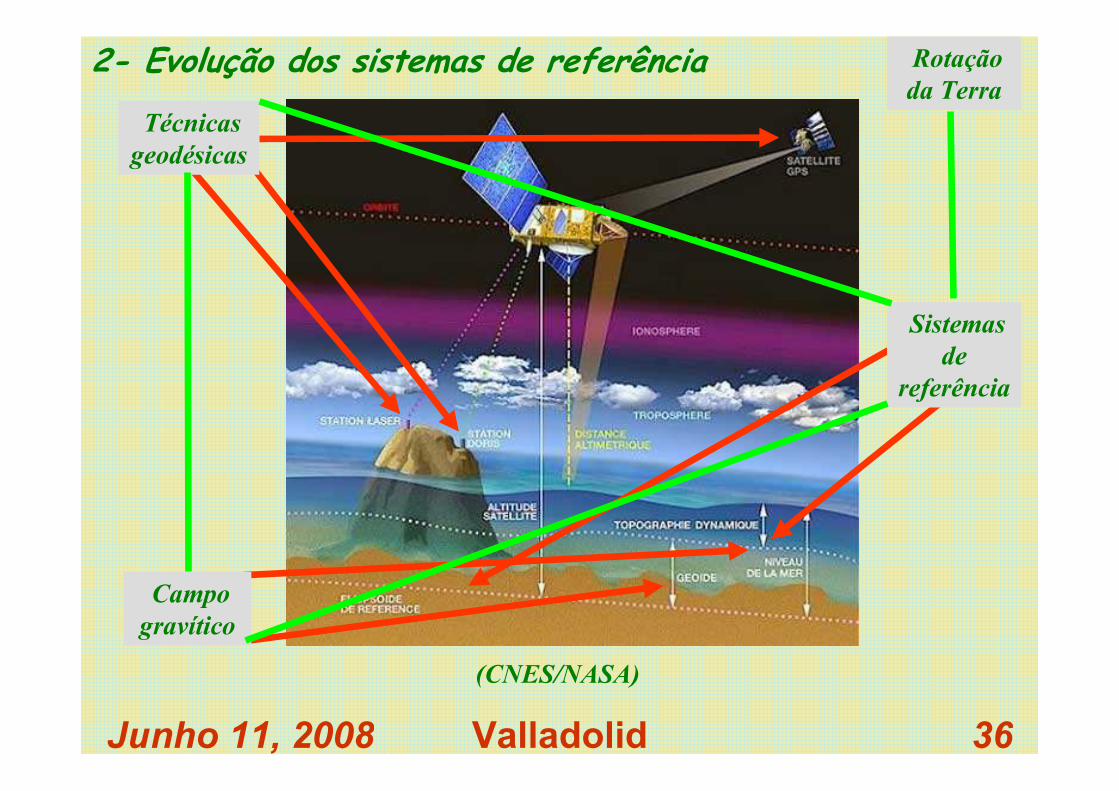
(CNES/NASA)
Sistemas de
referência
Técnicas geodésicas
Campo gravítico
Rotação da Terra
2- Evolução dos sistemas de referência

Junho 11, 2008 Valladolid 37
CONTEÚDO
8Motivação
8Evolução dos sistemas de referência
88Sistemas de referência e referenciais Sistemas de referência e referenciais geogeo--espaciaisespaciais
8O projecto EUREF
8Adopção dos novos sistemas de geo-referenciação
8Notas finais
Junho 11, 2008 Valladolid 38
• NECESSIDADE DE INTRODUZIR NOVOS CONCEITOS
• TÉCNICAS GEODÉSICAS ESPACIAIS BASTANTE DESENVOLVIDAS A PARTIR DOS ANOS 80
• EXIGÊNCIAS DE MAIOR PRECISÃO PELA COMUNIDADE CIENTÍFICA(GEODESIA, GEODINÂMICA, GEOFÍSICA)
• UNIFORMIZAÇÃO A NÍVEL GLOBAL
PORQUÊ?
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 39
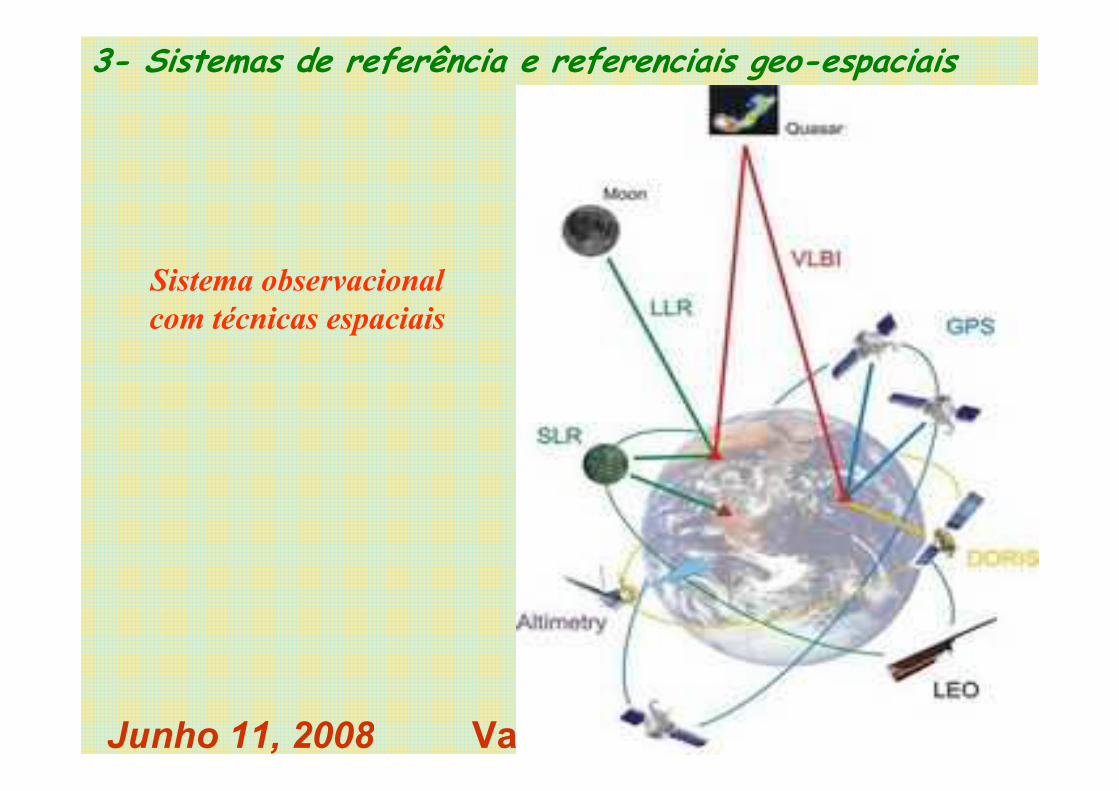
Sistema observacionalcom técnicas espaciais
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 40
SISTEMA QUE ACOMPANHA O MOVIMENTO DE ROTAÇÃO DA TERRA NO SEU MOVIMENTO DIURNO NO ESPAÇO
• DEFINIÇÃO MATEMÁTICA E FÍSICA
• SISTEMA DE EIXOS TRIDIMENSIONAL DEFINIDOS POR UMA ORIGEM, UMA UNIDADE DE COMPRIMENTO E UMA ORIENTAÇÃO
• CONSTANTES FÍSICAS ASSOCIADAS:• tempo
• velocidade de propagação da luz no vácuo
• GM
TRS - TERRESTRIAL REFERENCE SYSTEM
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 41
• Representa um espaço afim (Euclidiano)
• GEOCÊNTRICO
• Origem perto do centro de massa da Terra (actualmente alguns cm)
• Meridianos origem quase coincidentes
• QUASI-GEOCÊNTRICO
• Origem afastada algumas centenas de metros do centro de massa da Terra
• Sistemas concretizados por técnicas geodésicas terrestres
TRS - CARACTERÍSTICAS
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 42
Z1
Y1
X1
X2
Y2
Z2
(TX, TY, TZ)
RX
RY
RZ
O1
O2
RELAÇÕES ENTRE 2 SISTEMAS
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 43
PARÂMETROS DE TRANSFORMAÇÃO (BÜRSA-WOLF)
Transformação de semelhança (Helmert) no espaço
X2 = ∆∆∆∆X + ( 1 + αααα) R X1
X1 = X1 X2 = X2 ∆∆∆∆X = TXY1 Y2 TYZ1 Z2 TZ
R = 1 -RZ RYRZ 1 -RX-RY RX 1
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 44
REALIZAÇÃO DO SISTEMA DE REFERÊNCIA
• CONJUNTO DE REFERÊNCIAS GEODÉSICAS
• COORDENADAS ESTIMADAS COM BASE EM TÉCNICAS DE GEODESIA ESPACIAL
TRF - TERRESTRIAL REFERENCE FRAME
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 45
ADOPTADO EM 1991 (VIENA) PELA UGGI (União Geodésica e Geofísica Internacional)
DEFINIÇÃO, REALIZAÇÃO E PROMOÇÃO A CARGO DO IERS (sucedeu ao BIH)
(International Earth Rotation and Reference Systems Service)
ITRS - INTERNATIONAL TERRESTRIAL REFERENCE SYSTEM
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 46
O IERS tem a seu cargo o cálculo dos parâmetros de
orientação da terra:
relação entre o Pólo Celeste das Efemérides (CEP) e o pólo celeste convencional (modelo de precessão e
nutação)
coordenadas do pólo instantâneo relativamente ao Pólo Celeste das Efemérides
relação entre a velocidade de rotação real e a velocidade de
rotação média (UT1)
GEOCENTRO
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 47
• Origem no centro de massa da Terra (considerando a massa da parte sólida, da parte líquida e da atmosfera)
• Unidade de comprimento: metro (SI)
• Orientação dos eixos consistente com a definição do BIH na época 1984.0. O IRP (IERS Reference Pole) e o IRM (IERS Reference Meridian) são consistentes ao nível de 0.005´´ com as correspondentes origens do BIH; o pólo de referência foi ajustado à CIO em 1967.
• Condição de não-rotação relativamente a movimentos tectónicos (não existência de rotação residual na evolução temporal do sistema)
ITRS - DEFINIÇÃO
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 48
CONJUNTO DE REFERÊNCIAS GEODÉSICAS
COORDENADAS ESTIMADAS COM BASE EM TÉCNICAS DE GEODESIA ESPACIAL
• VLBI (Very Long Baseline Interferometry)
• SLR (Satellite Laser Ranging)
• LLR (Lunar Laser Ranging)
• GPS (Global Positioning System)
• DORIS (Doppler Orbitography RadiopositioningIntegrated by Satellite)
ITRF - INTERNATIONAL TERRESTRIAL REFERENCE FRAME
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 49
A PRECISÃO DAS ACTUAIS TÉCNICAS DE OBSERVAÇÃO PERMITE DETECTAR A
VARIAÇÃO TEMPORAL DAS COORDENADAS
AS COORDENADAS SÃO FORNECIDAS EM SOLUÇÕES DESIGNADAS POR ITRFyy
ALÉM DAS COORDENADAS, SÃO TAMBÉM ESTIMADAS AS TRANSLAÇÕES E AS
VELOCIDADES
COORDENADAS ITRF - 1
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 50
A POSIÇÃO DE UM PONTO LOCALIZADO NA SUPERFÍCIE DA TERRA SÓLIDA É EXPRESSA NA FORMA
COORDENADAS ITRF - 2
correcções devidas
a efeitos com
variação temporal
vector posição
na época t0
vector posição
na época t
vector velocidade
na época t0marés terrestrescarga oceânica
carga atmosféricaressonância pós-glaciar
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 51
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 52
ITRF2000
• orientação do ITRF2000 igual à do ITRF97• origem – SLR (centro de massa)• escala – SLR e VLBI
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 53
CO-LOCALIZAÇÕES ITRF2005
(Zuheir Altamimi, 2006)
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 54
ITRF2005ITRF2005 STATION POSITIONS AT EPOCH 2000.0 AND VELOCITIES
GPS STATIONS
DOMES NB. SITE NAME TECH. ID. X/Vx Y/Vy Z/Vz Sigmas -----------------------m/m/y---------------------
10002M006 GRASSE GPS GRAS 4581690.974 556114.744 4389360.739 0.001 0.001 0.001 10002M006 -.0139 0.0186 0.0116 .0001 .0001 .0001 13909S001 CASCAIS GPS CASC 4917536.986 -815726.310 3965857.316 0.006 0.003 0.005 13909S001 -.0069 0.0201 0.0141 .0014 .0006 .0011
ITRF2005 : Definição do DatumOrigem:Parâmetros de translação nulos na época 2000.0 e respectivas taxas de variação nulas entre o ITRF2005 e as séries temporais SLR do ILRS
Escala: Factor de escala nulo na época 2000.0 e respectiva taxa de variação nula entre o ITRF2005 e as séries temporais VLBI do IVS
Orientação: Parâmetros de rotação nulos na época 2000.0 e respectivas taxas de variação nulas entre o ITRF2005 e o ITRF2000
(http://itrf.ensg.ign.fr)
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 55
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 56
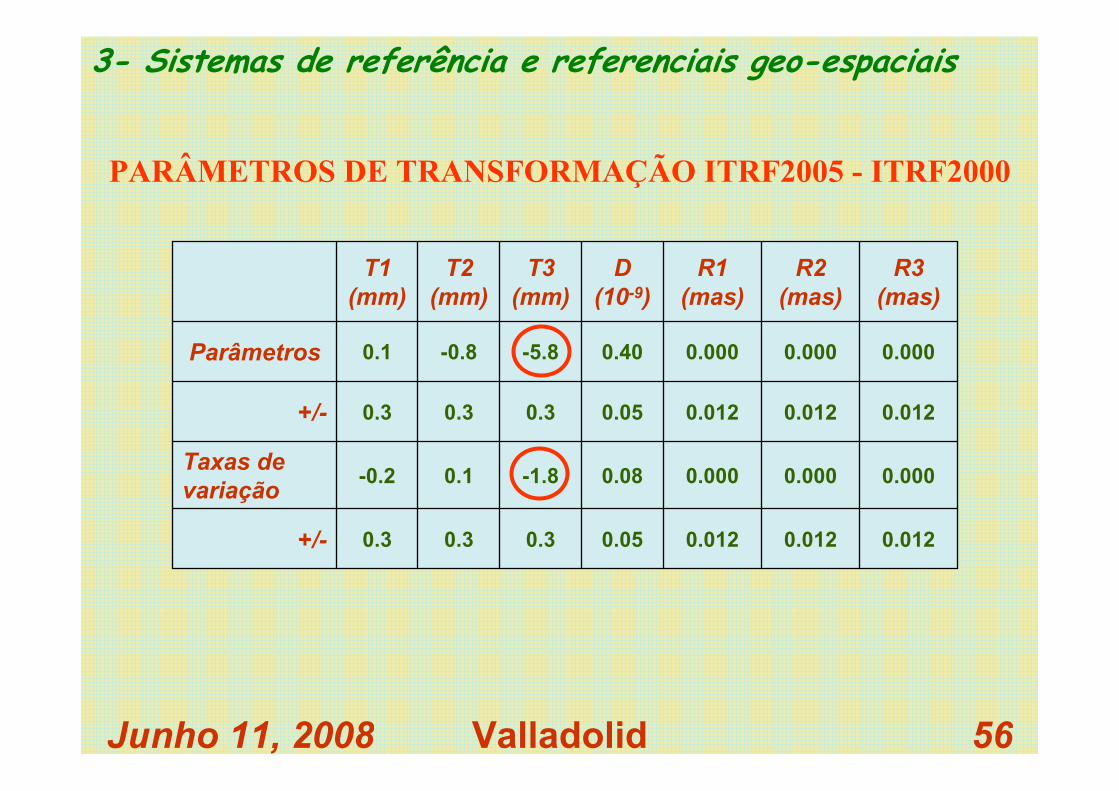
PARÂMETROS DE TRANSFORMAÇÃO ITRF2005 - ITRF2000
0.0120.0120.0120.050.30.30.3+/-
0.0000.0000.0000.08-1.80.1-0.2Taxas de variação
0.0120.0120.0120.050.30.30.3+/-
0.0000.0000.0000.40-5.8-0.80.1Parâmetros
R3 (mas)
R2 (mas)
R1 (mas)
D (10-9)
T3 (mm)
T2 (mm)
T1 (mm)
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 57
WGS84
8Evoluiu a partir do WGS72, utilizado para o sistema de satélites TRANSIT, percursor do NAVSTAR-GPS
8É um sistema geodésico de referência dinâmico, com um elipsóide de referência associado, com o mesmo nome
8O elipsóide WGS84 é praticamente coincidente com o GRS80
8O referencial associado é um conjunto de estações de rastreio do Departamento de Defesa norte-americano
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 58
DEFINIÇÃO DO SISTEMA DE COORDENADAS
8É um sistema terrestre convencional geocêntrico (ECEF)
8A orientação é consistente com a do BIH em 1984.0
Pólo de Referência do IERS
Meridiano de Referência do IERS
Centro de Massa da Terra
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 59
O REFERENCIAL ASSOCIADO AO WGS84
8A realização do sistema baseia-se num conjunto consistente de coordenadas de estações (TRF)
8O conjunto original de estações apresentava consistência nas coordenadas ao nível de 2 m; funcionou até 1994
8Em 1994 (semana GPS 730) e em 1996 (semana GPS 873)foram adoptadas novas realizações baseadas no ITRF; WGS84 (G730) e WGS84 (G873)
8Em 2002 (semana GPS 1150) foi adoptada a actual realização (G1150) baseada no ITRF2000;
8Consistência actual (49 estações) com o ITRF2000 ≈≈≈≈ 1 cm
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 60
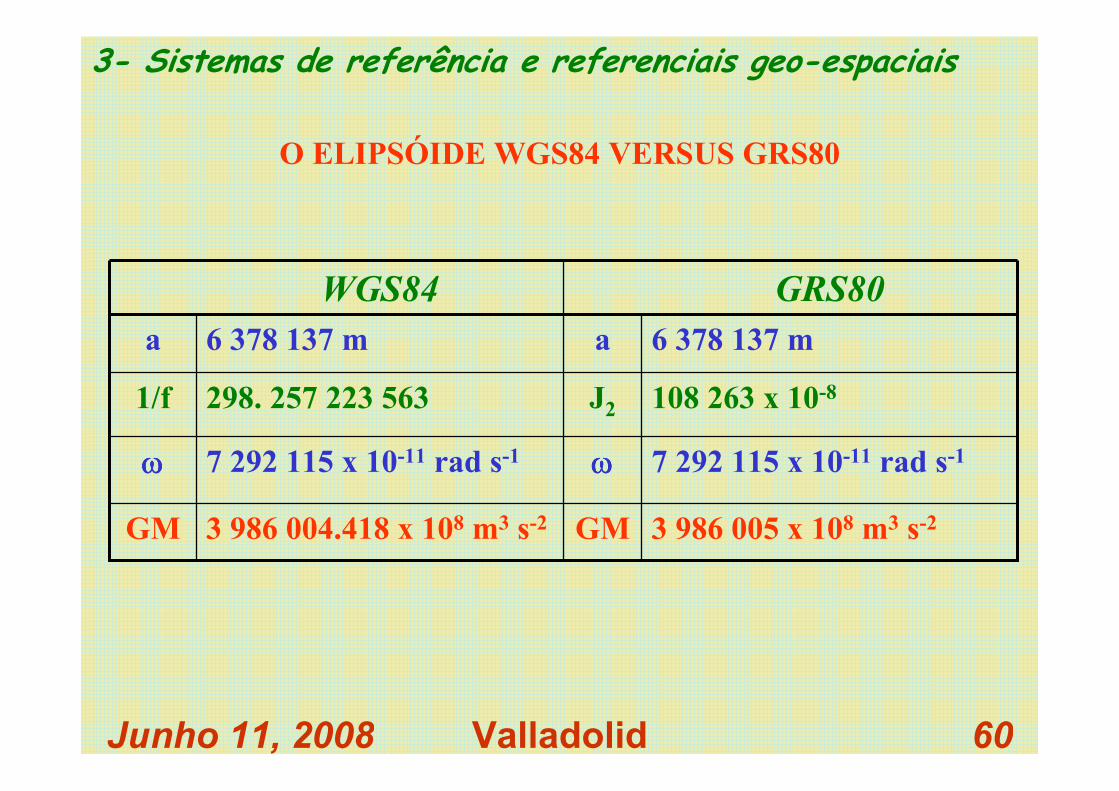
O ELIPSÓIDE WGS84 VERSUS GRS80
3 986 005 x 108 m3 s-2GM3 986 004.418 x 108 m3 s-2GM
7 292 115 x 10-11 rad s-1ωωωω7 292 115 x 10-11 rad s-1ωωωω
108 263 x 10-8J2298. 257 223 5631/f
6 378 137 ma6 378 137 ma
GRS80WGS84
3- Sistemas de referência e referenciais geo-espaciais

Junho 11, 2008 Valladolid 61
INCONSISTÊNCIAS DO WGS84 - 1
1/f
a harmónica zonal normalizada de segundo grau C 2,0 era um dos
parâmetros originais e foi substituído pelo achatamento; no
cálculo foi usado o valor do GRS80, mas devido a um erro de
truncatura o valor de 1/f foi acidentalmente modificado
C 2,0 = - J2 / √√√√ 5
J2 = 108 263 x 10-8 (factor dinâmico de forma - GRS80)
1/f = 298. 257 222 101 (GRS80)
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 62
GM
foi inicialmente usado o valor do GRS80
GM = 3 986 005*108 m3 s-2
o valor actual corresponde ao recomendado pela IAG e foi introduzido em 1994
o valor antigo é o que ainda se mantém nos receptores para não ser necessário alterar todo o software residente; por isso é também utilizado para gerar as efemérides transmitidas
INCONSISTÊNCIAS DO WGS84 - 2
3- Sistemas de referência e referenciais geo-espaciais
Junho 11, 2008 Valladolid 63
CONTEÚDO
8Motivação
8Evolução dos sistemas de referência
8Sistemas de referência e referenciais geo-espaciais
88O projecto EUREFO projecto EUREF
8Adopção dos novos sistemas de geo-referenciação
8Notas finais

Junho 11, 2008 Valladolid 64
Assembleia Geral da UGGI, Vancouver, 1987
constituição
Section 1 - Positioning
Commission X - Global and Regional Geodetic Networks
Assembleia Geral da UGGI, Sapporo, 2003
integração na
Commission 1 – Reference Frames
Sub-commission 1.3 - Regional Reference Frames
www.euref-iag.net
www.euref.eu
4- O projecto EUREF
Junho 11, 2008 Valladolid 65
Objectives and development of activities
• definition, realization and maintenance of the European Reference Systems
• cooperation with the pertinent IAG components and EuroGeographics
• use the most accurate and reliable terrestrial and space-borne techniques available
• develop the necessary scientific background and methodology
• high quality products and services
Termos de Referência (EUREF 2004, Bratislava)
4- O projecto EUREF
Junho 11, 2008 Valladolid 66
ORGANIZAÇÃO
Presidente e Secretário(coordenação geral e gestão)
Technical Working Group(coordenação das actividades técnicas e científicas)
Membros de (quase) todos os países Europeus8Universidades e Instituições de Investigação8Institutos Geográficos Nacionais (NMA)8...
4- O projecto EUREF
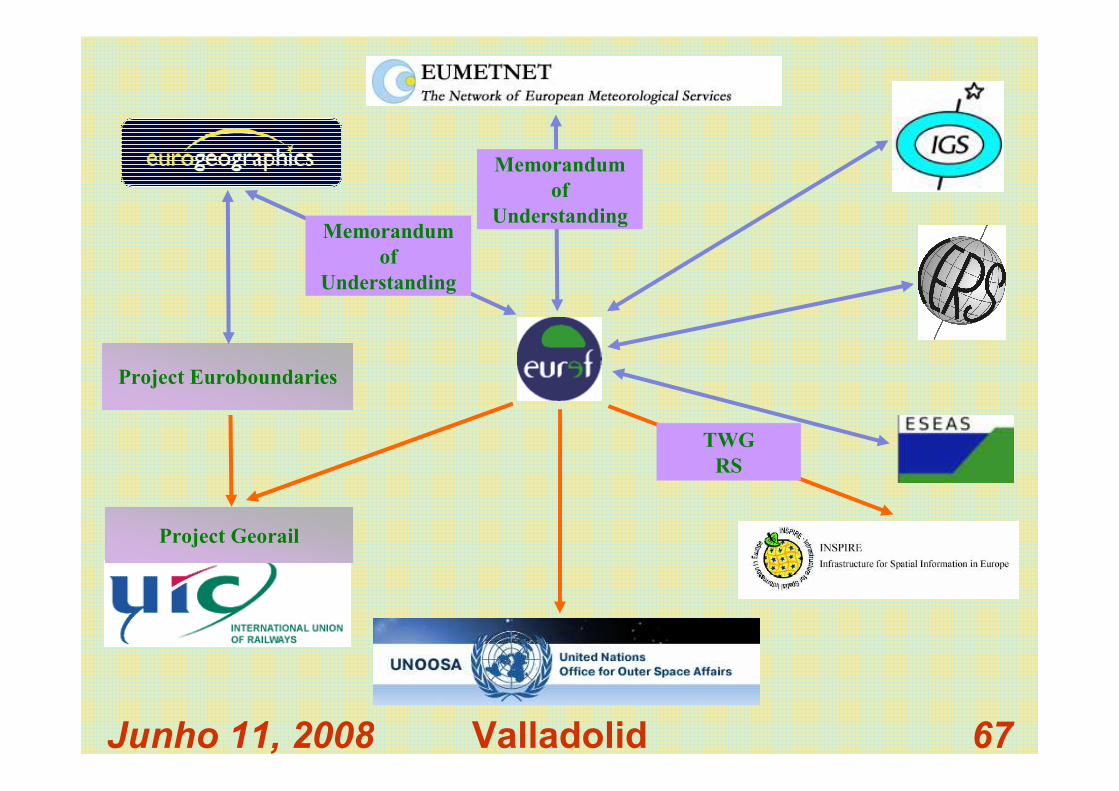
Junho 11, 2008 Valladolid 67
Project Euroboundaries
Memorandumof
Understanding
Memorandumof
Understanding
Project Georail
TWGRS

Junho 11, 2008 Valladolid 68
COMO ESTABELECER E MANTER O REFERENCIAL GEODÉSICO EUROPEU?
8um conjunto de 8estações geodésicas de referência espaciais(SLR e VLBI)
8estações GPS permanentes(EUREF Permanent Network - EPN)
8uma rede de estações geodésicas de referência de altaprecisão determinadas por várias campanhas GPS
8a combinação das Redes8Europeia Unificada de Nivelamento (UELN) 8GPS de Referência Vertical Europeia (EUVN)
4- O projecto EUREF

Junho 11, 2008 Valladolid 69
EUROPEAN TERRESTRIAL REFERENCE SYSTEM 89 (ETRS89)
Definição
“A Sub-comissão EUREF recomenda que o sistema a ser adoptadoseja coincidente com o ITRS na época 1989.0 e fixado à parte estávelda Placa Euro-asiática, e será designado por European Terrestrial Reference System 1989 (ETRS89)”
resolução adoptada no simpósio EUREF realizadoem Florença, 1990
4- O projecto EUREF

Junho 11, 2008 Valladolid 70
Realização
• usando as realizações ITRS: para cada referencial ITRFyy pode ser calculado um correspondenteem ETRS89 e designado por ETRFyy. Estão disponíveis as seguintessoluções ETRF:
• posicionamento com observações GPS (campanhas ou estações permanentes):usando as coordenadas ITRFyy mais recentes da estação e efeméridesde precisão do IGS seguindo o procedimento descrito em (Boucher andAltamimi, 2007)
39 CAMPANHAS DESDE 1990
ETRF89 ETRFyyETRF2000 ETRF2005
4- O projecto EUREF
Junho 11, 2008 Valladolid 71
CONCEITOS BASE
SISTEMA DE REFERÊNCIA8ETRS89 roda em conjunto com a parte estável da Europa8As relações entre as estações Europeias mantêm-se
REFERENCIAL8ETRF89 é o sub-conjunto Europeu do ITRF89 (estações
SLR e VLBI)
8cada ITRF tem o correspondente ETRF
8densificação por campanhas GPS internamente em cada país ou região
8necessidade de classificar as estações de acordo com a qualidade das coordenadas
4- O projecto EUREF

Junho 11, 2008 Valladolid 72
1ª CAMPANHA: EUREF89 (92 estações)
4- O projecto EUREF
Junho 11, 2008 Valladolid 73
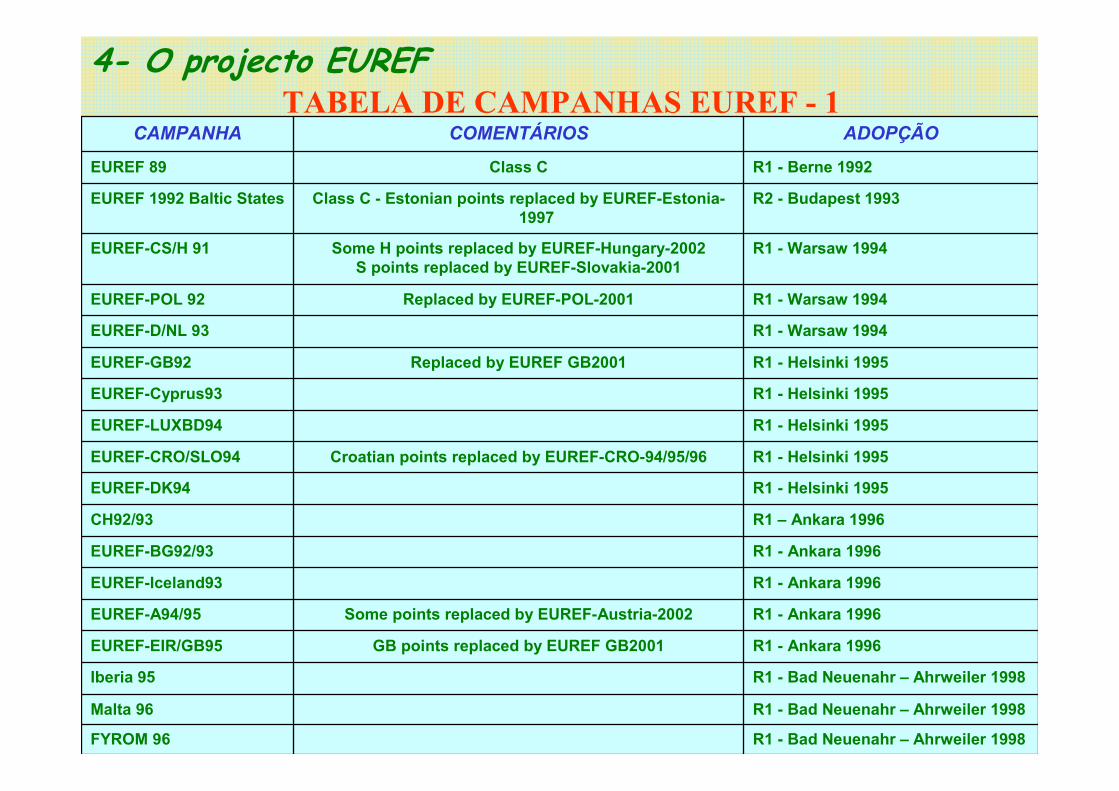
TABELA DE CAMPANHAS EUREF - 1
R1 - Bad Neuenahr – Ahrweiler 1998Malta 96
R1 - Bad Neuenahr – Ahrweiler 1998FYROM 96
R1 - Bad Neuenahr – Ahrweiler 1998Iberia 95
R1 - Ankara 1996GB points replaced by EUREF GB2001EUREF-EIR/GB95
R1 - Ankara 1996Some points replaced by EUREF-Austria-2002EUREF-A94/95
R1 - Ankara 1996EUREF-Iceland93
R1 - Ankara 1996EUREF-BG92/93
R1 – Ankara 1996CH92/93
R1 - Helsinki 1995EUREF-DK94
R1 - Helsinki 1995Croatian points replaced by EUREF-CRO-94/95/96EUREF-CRO/SLO94
R1 - Helsinki 1995EUREF-LUXBD94
R1 - Helsinki 1995EUREF-Cyprus93
R1 - Helsinki 1995Replaced by EUREF GB2001EUREF-GB92
R1 - Warsaw 1994EUREF-D/NL 93
R1 - Warsaw 1994Replaced by EUREF-POL-2001EUREF-POL 92
R1 - Warsaw 1994Some H points replaced by EUREF-Hungary-2002S points replaced by EUREF-Slovakia-2001
EUREF-CS/H 91
R2 - Budapest 1993Class C - Estonian points replaced by EUREF-Estonia-1997
EUREF 1992 Baltic States
R1 - Berne 1992Class CEUREF 89
ADOPÇÃOCOMENTÁRIOSCAMPANHA
4- O projecto EUREF

Junho 11, 2008 Valladolid 74
TABELA DE CAMPANHAS EUREF - 2
R1 - Riga 2006Combined EUREF-BG92/93, previously accepted in 1996 EUREF-BG-2004
R1 - Bratislava 2004Re-processing; previously accepted in 2002 EUREF-GB-2001
R1 - Riga 2006Only points from Latvia and Lithuania in the database EUREF-NKG-2003
R1 - Bratislava 2004EUREF-Armenia- 2002
R1 - Toledo 2003Old points deleted from the databaseEUREF-Hungary-2002
R1 - Toledo 2003Old points deleted from the databaseEUREF-Austria-2002
R1 - Toledo 2003Old points deleted from the databaseEUREF-POL-2001
R1 - Toledo 2003Old points deleted from the databaseEUREF-Slovakia-2001
R1 - Ponta Delgada 2002Old points deleted from the database Re-processing in 2004
EUREF GB2001
R1 - Dubrovnik 2001Old points deleted from the databaseEUREF-CRO-94/95/96
R1 - Tromsoe 2000EUREF-Balear-98
R1 - Tromsoe 2000Old points deleted from the databaseEUREF-SWEREF-99
R1 - Tromsoe 20003 points in Ukrania not included (bad quality) Moldavia-99
R3 - Prague 1999Wait for publication due to political reasonsEUREF-Balkan-98
R2 - Prague 1999Subset of points (EUREF 1992 no longer acceptable)EUREF-Estonia-1997
R2 - Prague 1999Subset of pointsEUREF-FIN-96/97
R1 - Prague 1999EUVN97
R2 - Bad Neuenahr – Ahrweiler 1998Subset of pointsEUREF-NOR94/NOR95
ADOPÇÃOCOMENTÁRIOSCAMPANHA
4- O projecto EUREF

Junho 11, 2008 Valladolid 75
COBERTURA DAS
CAMPANHAS
extensão e densificação
(actualizado de Seeger et al., 1998)
•EUREF 1989 - 2007
4- O projecto EUREF

Junho 11, 2008 Valladolid 76
REALIZAÇÃO DO ETRS89
• Exprimir em ITRFYY na época central (tc) das observaçõespertinentes
• Exprimir em ETRS89 usando 14 parâmetros de transformação(alguns deles são nulos)
Posições
Velocidades
(Altamimi, Z., 2007)
4- O projecto EUREF
Junho 11, 2008 Valladolid 77
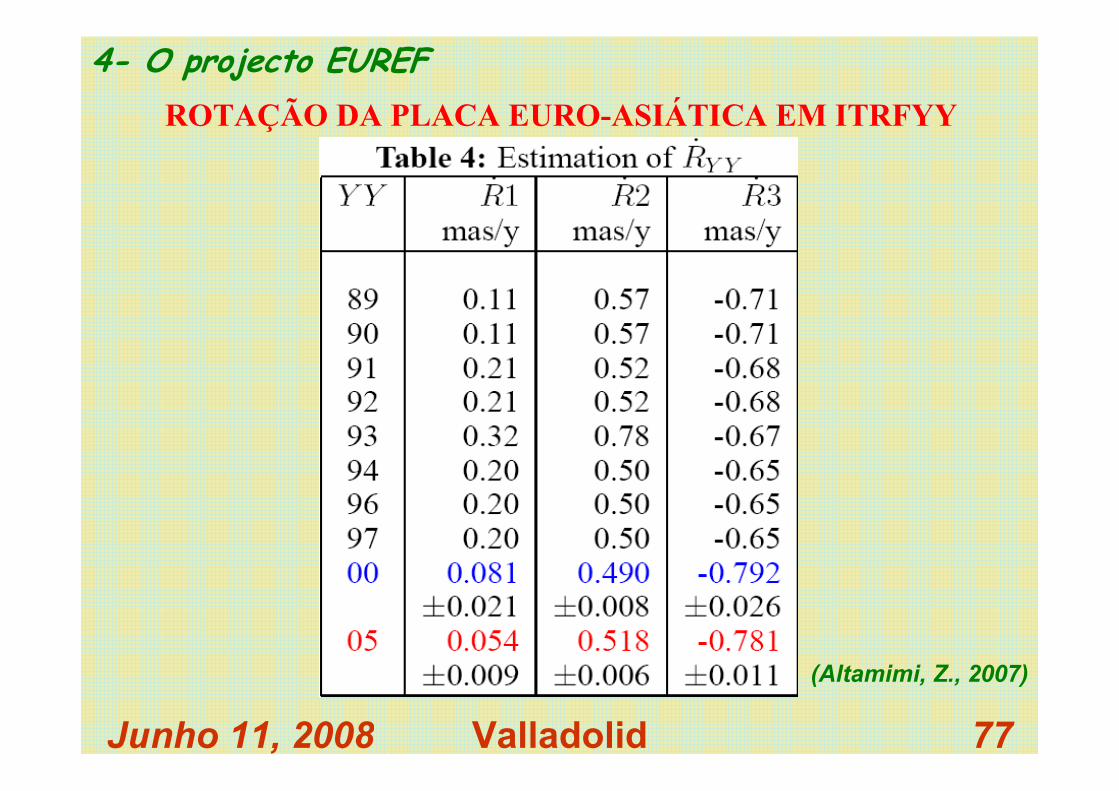
ROTAÇÃO DA PLACA EURO-ASIÁTICA EM ITRFYY
(Altamimi, Z., 2007)
4- O projecto EUREF

Junho 11, 2008 Valladolid 78
MODELO DE TRANSFORMAÇÃO
X (S0) = X(S1) + T(S1) + R X(S1) ∆∆∆∆ t
X (S0) - coordenadas em ETRS89
X(S1) - coordenadas em ITRS (ITRFyy) na época de observação
T(S1) - translação entre ITRFyy e ITRF89
R - rotação para 1989.0 (movimento da placa Euro-asiática)
∆∆∆∆ t - diferença de tempo entre a época de observação e 1989.0
4- O projecto EUREF
Junho 11, 2008 Valladolid 79
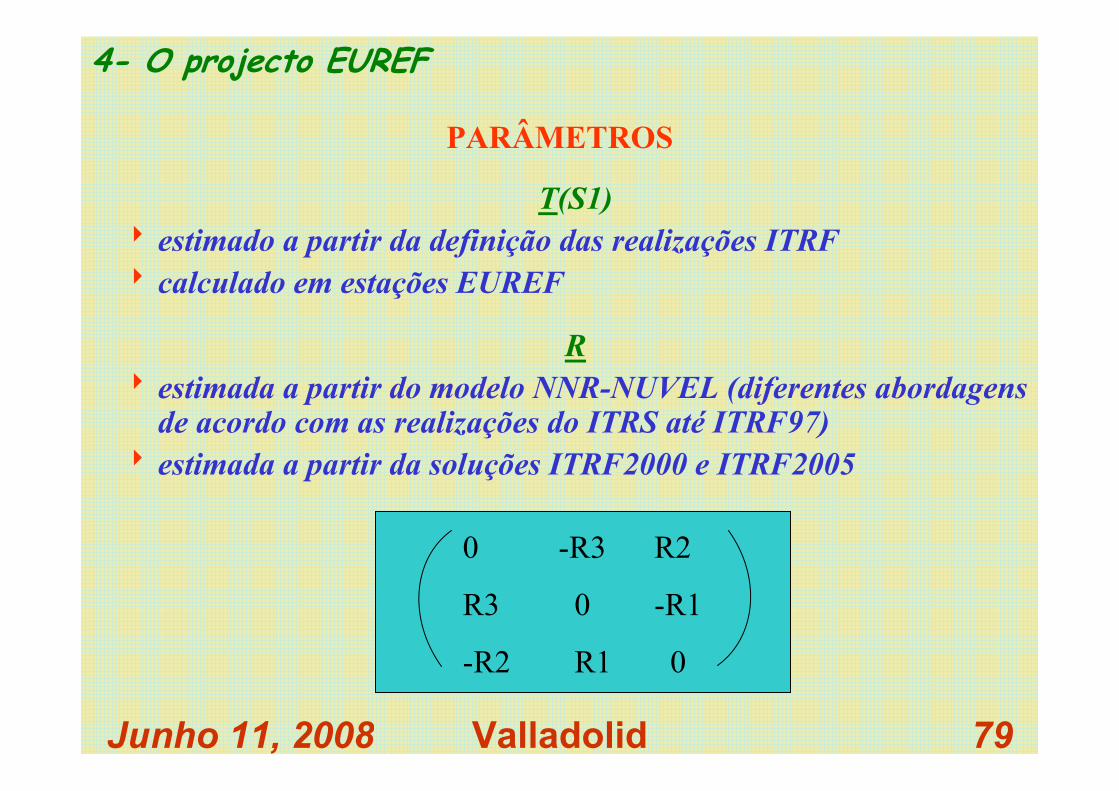
PARÂMETROS
T(S1)8estimado a partir da definição das realizações ITRF8calculado em estações EUREF
R8estimada a partir do modelo NNR-NUVEL (diferentes abordagens
de acordo com as realizações do ITRS até ITRF97)8estimada a partir da soluções ITRF2000 e ITRF2005
0 -R3 R2
R3 0 -R1
-R2 R1 0
4- O projecto EUREF

Junho 11, 2008 Valladolid 80
COMPONENTES DO VECTOR TITRFyy ETRF89 (ETRS89)
-4.8 ±0.45.1 ±0.45.4 ±0.42000
-3.7 ±0.44.8 ±0.45.6 ±0.42005
-4.9 ±0.44.1 ±0.44.1 ±0.497
-4.9 ±0.44.1 ±0.44.1 ±0.496
-4.9 ±0.44.1 ±0.44.1 ±0.494
-2.1 ±0.55.3 ±0.51.9 ±0.493
-3.7 ±0.64.0 ±0.53.8 ±0.592
-3.7 ±0.82.5 ±0.82.1 ±0.891
-2.3 ±0.72.8 ±0.71.9 ±0.790
00089
T3 (cm)T2 (cm)T1 (cm)ITRF
4- O projecto EUREF

Junho 11, 2008 Valladolid 81
COMPONENTES DA MATRIZ RITRFyy ETRF89 (ETRS89)
-0.000792±0.000026
0.000490±0.000008
0.000081±0.000021
2000
-0.000781±0.000011
0.000518±0.000006
0.000054±0.000009
2005
-0.00065 0.000500.0002097
-0.00065 0.000500.0002096
-0.00065 0.000500.0002094
-0.00067 0.000780.0003293
-0.00068 0.000520.0002192
-0.00068 0.000520.0002191
-0.00071 0.000570.0002190
-0.00071 0.000570.0002189
R3 (´´/ano)R2 (´´/ano)R1 (´´/ano)ITRF
4- O projecto EUREF

Junho 11, 2008 Valladolid 82
REDE DE ESTAÇÕES GNSS EUREF (EPN)
8TEVE INÍCIO EM 1995 E CONTA ACTUALMENTE COM CERCA DE 200 ESTAÇÕES
8CONJUNTO DE ESTAÇÕES GPS QUE OPERAM SEGUNDO OS PADRÕES DO IGS
8DENSIFICAÇÃO DO IGS NA EUROPA (50% INTEGRADA NO IGS)
8É UM IGS REGIONAL NETWORK ASSOCIATE ANALYSIS CENTER (RNAAC) DESDE 1996
8CONTRIBUIÇÃO PARA A REALIZAÇÃO DO ITRS (ITRF2000 e ITRF2005 – global e densificação regional)
4- O projecto EUREF

Junho 11, 2008 Valladolid 83
� Estações GNSS de observação contínua
� Centros de Dados que proporcionam acesso àsobservações
� Centros de Análise que calculam as coordenadas e sub-produtos
� Centro de Combinação
� EPN Central Bureau (C. Bruyninx, Bélgica)
COMPONENTES
4- O projecto EUREF

Junho 11, 2008 Valladolid 84
204 estações permanentes (1 inactiva)

Junho 11, 2008 Valladolid 85
CENTROS DE DADOS
4- O projecto EUREF

Junho 11, 2008 Valladolid 86
CENTROS DE
ANÁLISE
4- O projecto EUREF
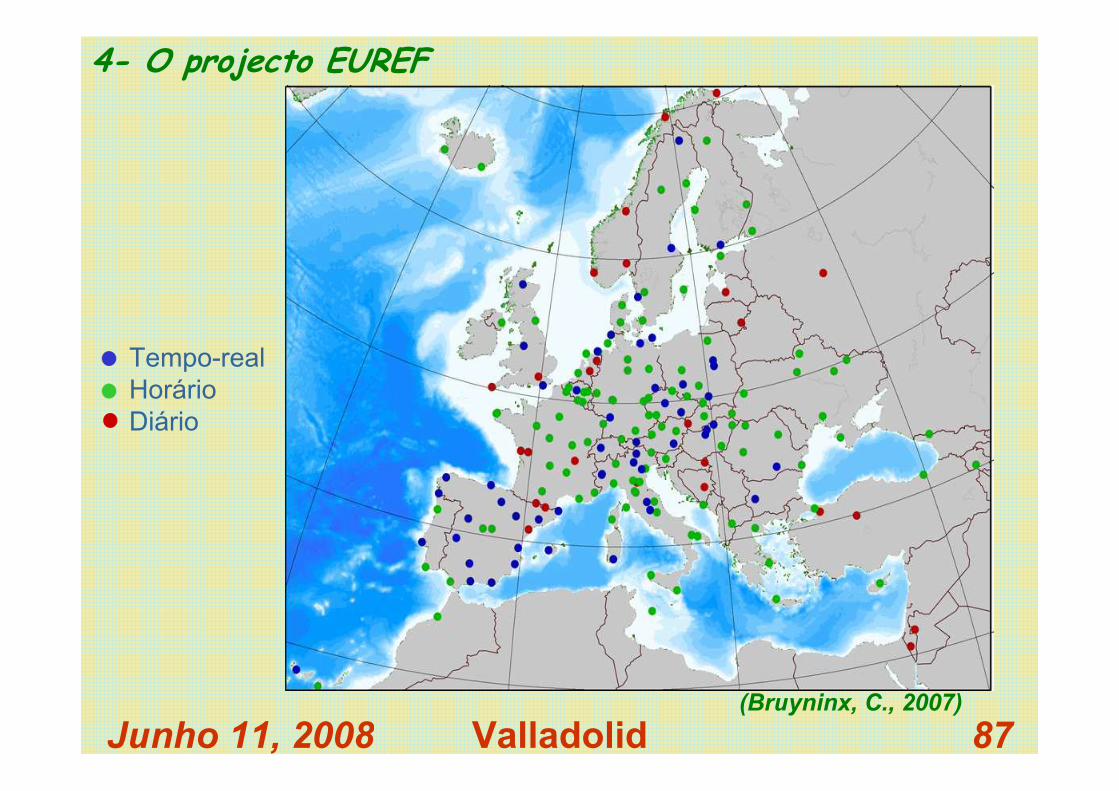
Junho 11, 2008 Valladolid 87
Tempo-real
Horário
Diário
(Bruyninx, C., 2007)
4- O projecto EUREF
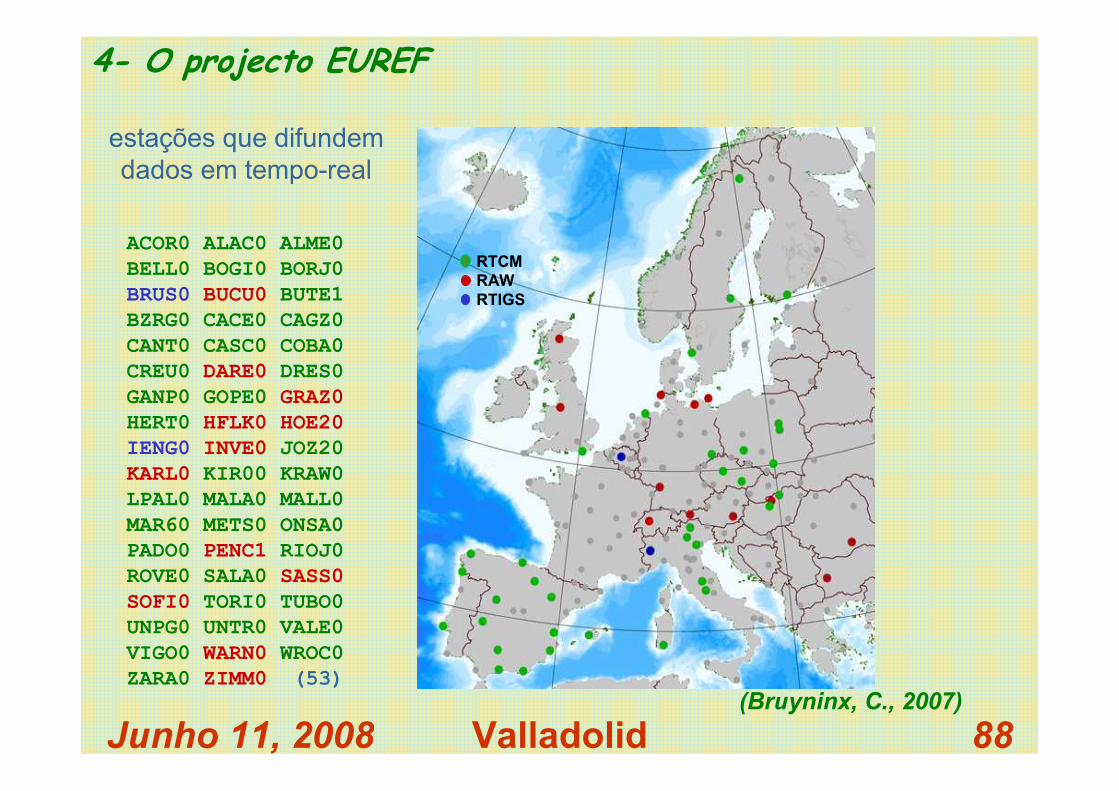
Junho 11, 2008 Valladolid 88
RTCMRAW RTIGS
ACOR0 ALAC0 ALME0
BELL0 BOGI0 BORJ0
BRUS0 BUCU0 BUTE1
BZRG0 CACE0 CAGZ0
CANT0 CASC0 COBA0
CREU0 DARE0 DRES0
GANP0 GOPE0 GRAZ0
HERT0 HFLK0 HOE20
IENG0 INVE0 JOZ20
KARL0 KIR00 KRAW0
LPAL0 MALA0 MALL0
MAR60 METS0 ONSA0
PADO0 PENC1 RIOJ0
ROVE0 SALA0 SASS0
SOFI0 TORI0 TUBO0
UNPG0 UNTR0 VALE0
VIGO0 WARN0 WROC0
ZARA0 ZIMM0 (53)
(Bruyninx, C., 2007)
estações que difundem
dados em tempo-real
4- O projecto EUREF

Junho 11, 2008 Valladolid 89
• Em Nov. 2006 o IGS e a EPN passaram a usar modelos
absolutos para os centros de fase em vez dos relativos
• Antena + Campânula
• Classificação :
A. Modelos absolutos baseados em calibrações com robot
A1. Calibrações individuais: válidas for UM conjunto
antena/campânula com um NS específico
A2. Calibrações tipo: válidas para todos os conjuntos
antena/campânula de um tipo específico
B. Modelos absolutos baseados em modelos relativos (válidos
somente acima de 10° elevação, sem dependência azimutal)
ANTENA/CAMPÂNULA
4- O projecto EUREF

Junho 11, 2008 Valladolid 90
Calibrações absolutas
individuais (A1)
Calibrações absolutas
verdadeiras para um
tipo (A2)
Calibrações absolutas
convertidas das
relativas (B)
Não há calibração
disponível por causa da
campânulaSão usadas calibrações da
antena correspondente sem a campânula
BISK,BUDP,ESCO,HFLK,IAVH,JOZ2,KIR0,
KOSG,LAMA,MAR6,MARJ,MOPI,NSSP,NYA1,
ONSA,PFAN,SBGZ,SKE0,SMID,SODA,SPT0,
SULD,THU3,TRFB,VACO,VIL0,VIS0,WROC,
WSRT (Bruyninx, C., 2007)
4- O projecto EUREF

Junho 11, 2008 Valladolid 91
Velocidades EPN (ETRF2005): componente horizontal
(Altamimi, Z., 2007)
4- O projecto EUREF

Junho 11, 2008 Valladolid 92
(Altamimi, Z., 2007)
Velocidades EPN (ETRF2005): componente vertical
4- O projecto EUREF
Junho 11, 2008 Valladolid 93
4- O projecto EUREF

Junho 11, 2008 Valladolid 94
4- O projecto EUREF

Junho 11, 2008 Valladolid 95
FUTURO DATUM DO EVRS
EVRS2000 • datum definido pelo nível zero level do NAP• realizado por 1 ponto na Holanda
EVRS2007• realização do datum por vários pontos distribuídos pela Europa• manter o nível do EVRS2000 através de uma cuidadosa
distribuição de pontos datum• ajustar as altitudes à solução EVRS2000 introduzindo os valores
dos pontos datum do UELN 95/98 no ajustamento livre• monitorizar a evolução do EVRS através da observação de séries
temporais em estações ECGN seleccionadas
4- O projecto EUREF

Junho 11, 2008 Valladolid 96
Novos dados desde 2006
anunciado para 2008
Status Maio 2006
anunciado para 2007
fornecidos
não há
REDE EUROPEIA DE NIVELAMENTO(UNITED EUROPEAN LEVELLING NETWORK - UELN)
Ajustamento em 1995/98das redes nacionais
de nivelamento fundamental
REDE UELN95/98
4- O projecto EUREF
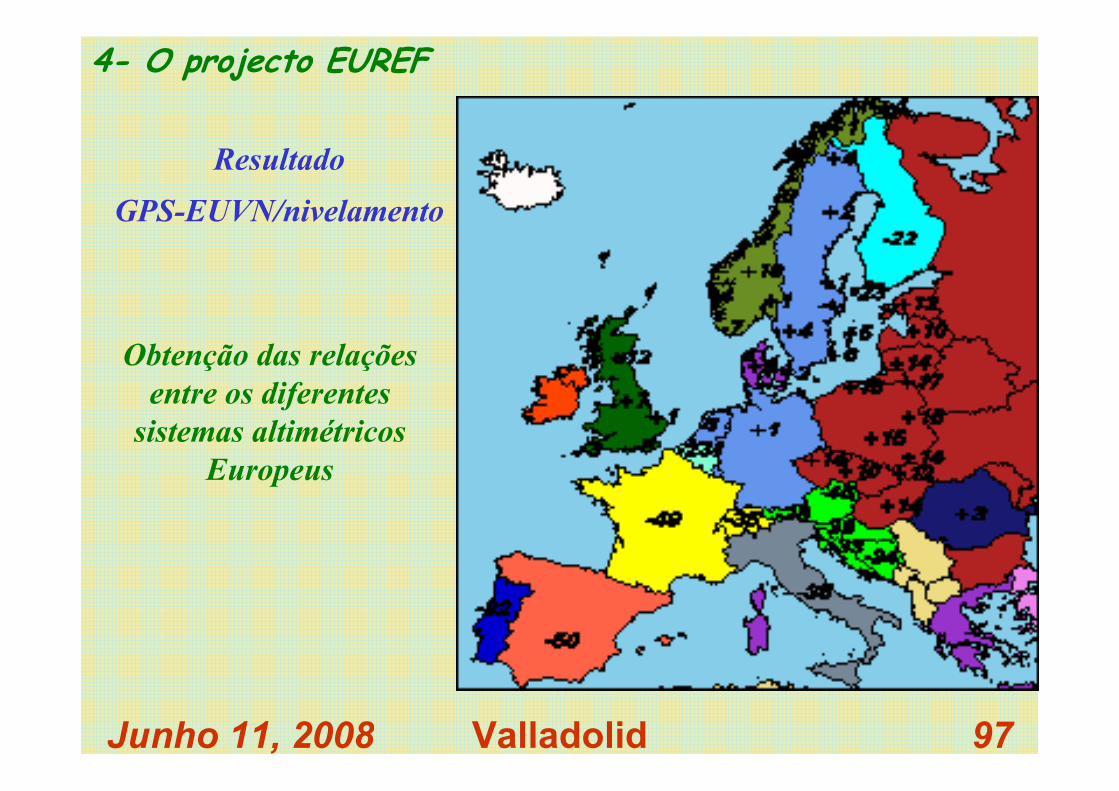
Junho 11, 2008 Valladolid 97
Obtenção das relaçõesentre os diferentes
sistemas altimétricosEuropeus
Resultado
GPS-EUVN/nivelamento
4- O projecto EUREF
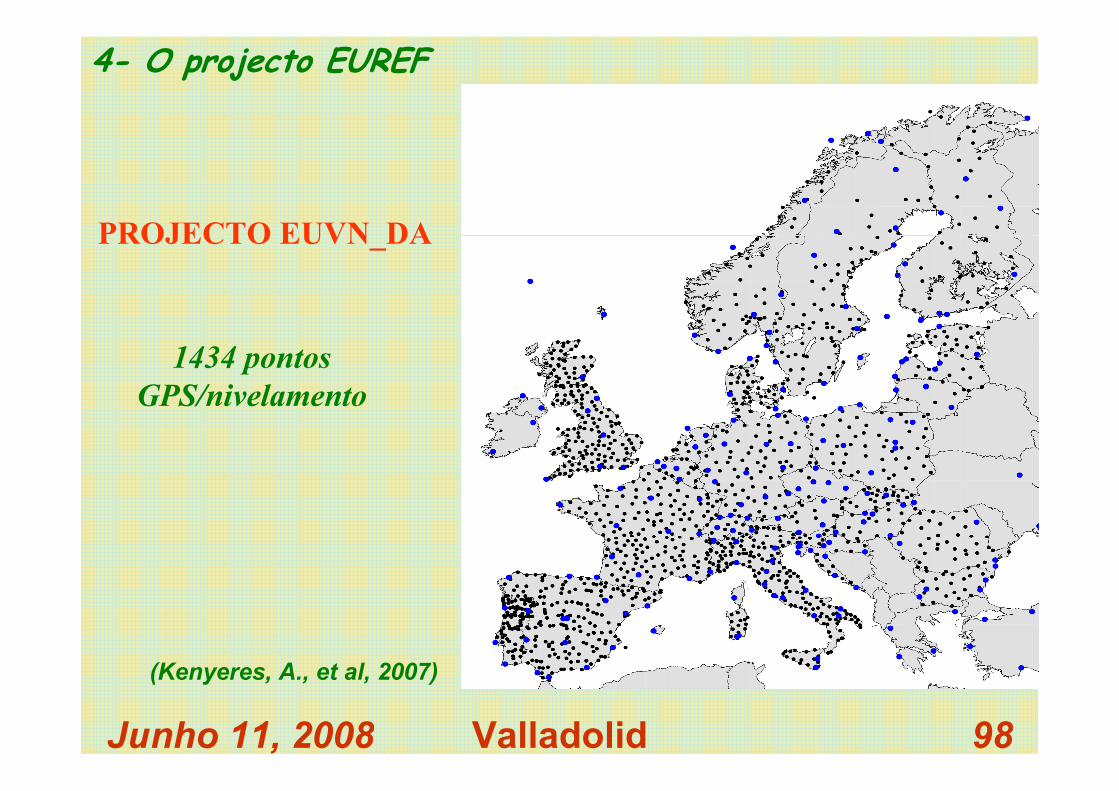
Junho 11, 2008 Valladolid 98
4- O projecto EUREF
1434 pontosGPS/nivelamento
PROJECTO EUVN_DA
(Kenyeres, A., et al, 2007)

Junho 11, 2008 Valladolid 99
CONTEÚDO
8Motivação
8Evolução dos sistemas de referência
8Sistemas de referência e referenciais geo-espaciais
8O projecto EUREF
88AdopAdopçção dos novos sistemas de geoão dos novos sistemas de geo--referenciareferenciaççãoão
8Notas finais

Junho 11, 2008 Valladolid 100
16Condições de utilização: complementar
13Condições de utilização: em situações específicas
6Condições de utilização: obrigatório
6Suporte oficial: norma
10Suporte oficial: lei
9 Suporte oficial: recomendação
4 (15%)Países que irão adoptar o ETRS89
21 (78%)Países que já adoptaram o ETRS89
27Países que responderam
2 (7%)Países que não irão adoptar o ETRS89
41Países para quem foi enviado o questionário
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 101
O SISTEMA PT-TM06
� Datum: ETRS89� Elipsóide: GRS80� Projecção: Gauss (Transversa de Mercator)� Ponto Central da Projecção:
• Paralelo central: 39º 40’ 5.73” N• Meridiano central: 8º 7’ 59.19” W
� Factor de escala no meridiano central: k=1� Falsa Origem:
• X = 0 m • Y = 0 m
5- Adopção dos novos sistemas de geo-referenciação
Junho 11, 2008 Valladolid 102-150000 -100000 -50000 0 50000 100000 150000
-300000
-250000
-200000
-150000
-100000
-50000
0
50000
100000
150000
200000
250000
300000
5 m
-150000 -100000 -50000 0 50000 100000 150000
-300000
-250000
-200000
-150000
-100000
-50000
0
50000
100000
150000
200000
250000
300000
5 m
-150000 -100000 -50000 0 50000 100000 150000
-300000
-250000
-200000
-150000
-100000
-50000
0
50000
100000
150000
200000
250000
300000
5 m
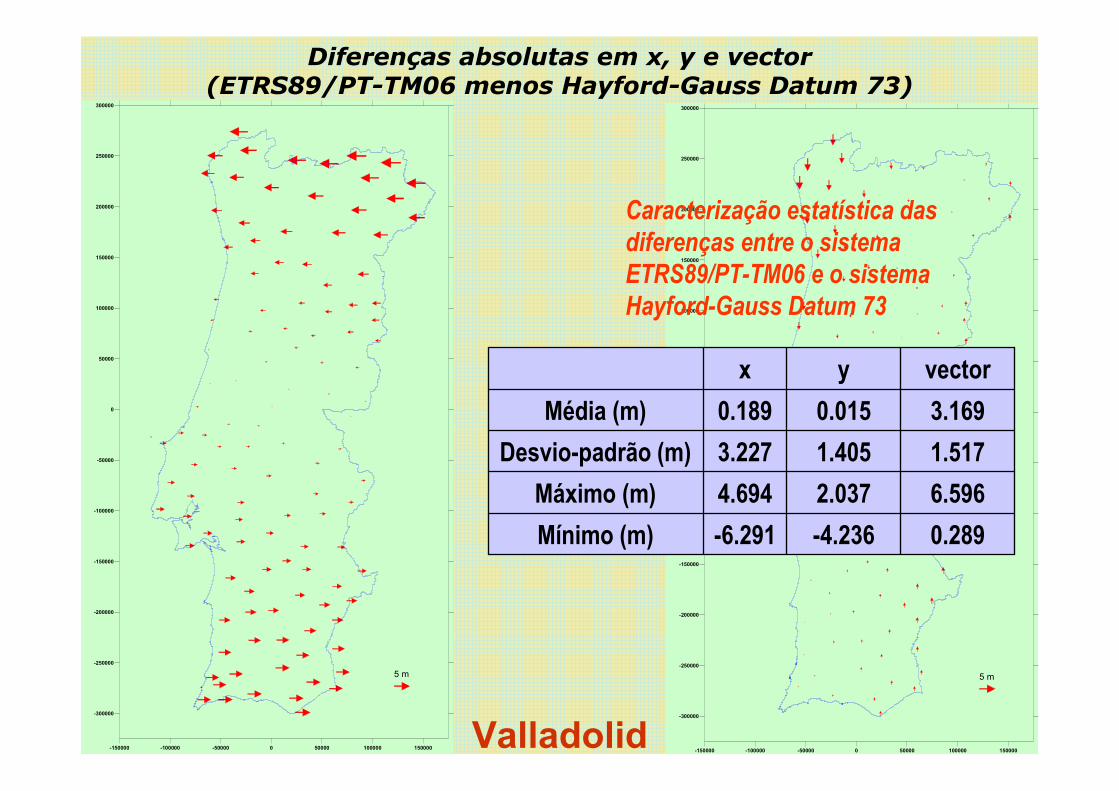
Diferenças absolutas em x, y e vector (ETRS89/PT-TM06 menos Hayford-Gauss Datum 73)
Caracterização estatística das
diferenças entre o sistema
ETRS89/PT-TM06 e o sistema
Hayford-Gauss Datum 73
0.289-4.236-6.291Mínimo (m)
6.5962.037 4.694Máximo (m)
1.5171.4053.227Desvio-padrão (m)
3.1690.015 0.189Média (m)
vectoryx
Junho 11, 2008 Valladolid 103
CAPÍTULO IIOtras disposiciones
Disposición transitoria primera. Método de transformación.El Consejo Superior Geográfico deberá facilitar, a través de su página web ubicada en el portal www.fomento.es, el método de transformación entre los sistemas de referencia nuevos y antiguos, su forma de utilización y la información técnica asociada.
Disposición transitoria segunda. Compilación y publicación de la cartografía y bases de datos de información geográfica y cartográfica.
Toda la cartografía y bases de datos de información geográfica y cartográfica producida o actualizada por las Administraciones Públicas deberá compilarse y publicarse conforme a lo que se dispone en este real decreto a partir del 1 de enero de 2015. Hasta entonces, la información geográfica y cartográfica oficial podrá compilarse y publicarse en cualquiera de los dos sistemas, ED50 o ETRS89, conforme a las necesidades de cada Administración Pública, siempre que las producciones en ED50 contengan la referencia a ETRS89.
Disposición transitoria tercera. Obligación de inscripción en el Registro Central de Cartografía.
A partir del 1 de enero de 2012 no podrá inscribirse en el Registro Central de Cartografía ni incluirse en el Plan Cartográfico Nacional ningún proyecto nuevo que no se atenga a las especificaciones del presente real decreto.
Junho 11, 2008 Valladolid 104
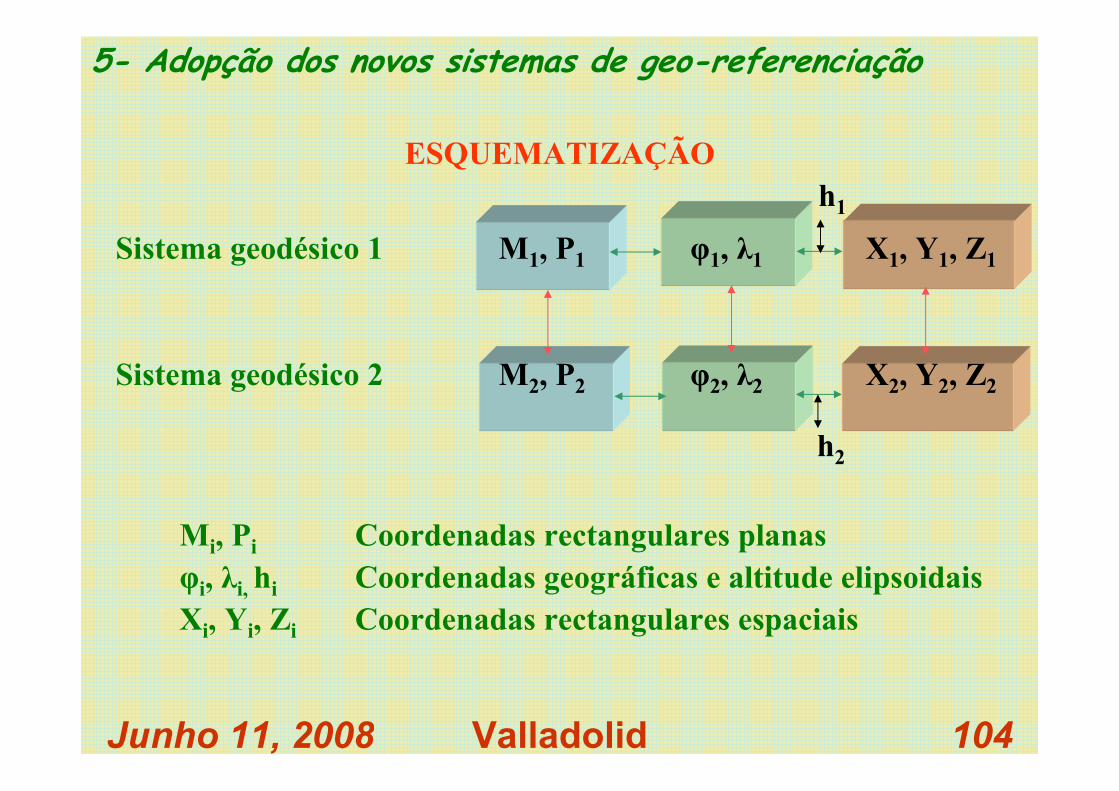
Sistema geodésico 1 M1, P1 φ1, λ1 X1, Y1, Z1
Sistema geodésico 2 M2, P2 φ2, λ2 X2, Y2, Z2
Mi, Pi Coordenadas rectangulares planasφi, λi, hi Coordenadas geográficas e altitude elipsoidaisXi, Yi, Zi Coordenadas rectangulares espaciais
ESQUEMATIZAÇÃOh1
h2
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 105
-209.359-109.6454368966.310732267.6104368756.951732157.965FARO DE VALENCIA
N (m)E (m)N (m)E (m)N (m)E (m)
ETRS89 - ED50ED50/INTERNACIONALETRS89/GRS80NOME
ESPANHA - ETRS89/GRS80 UTM E ED50/INTERNACIONAL UTM
-84.196100.0984290412.258471893.6544290328.062471993.752" RACHADO NOVO"
-84.130100.0804283085.647474339.1074283001.517474439.187" PICO DOS PADRES"
-84.076100.0244277302.042480644.9454277217.966480744.970" MONTE BRASIL"
-84.13899.9114284079.023492759.5444283994.885492859.455" FAVAS"
-84.10599.9344280542.519490217.3214280458.413490317.255" FALEIRAS"
-84.21699.9264292864.285490794.5864292780.069490894.512" CAPARICA"
-84.237100.0524294734.000477744.1574294649.763477844.209" BISCOITOS"
-84.20899.9624291973.459487053.1524291889.251487153.114" ALMINHAS"
N (m)E (m)N (m)E (m)N (m)E (m)
ITRF93 - BASE SWBASE SW/INTERNACIONALITRF93/GRS80NOME
AÇORES - ITRF93/GRS80 UTM E BASE SW/INTERNACIONAL UTM
COMPARAÇÃO DE COORDENADAS (SISTEMA UTM)
5- Adopção dos novos sistemas de geo-referenciação
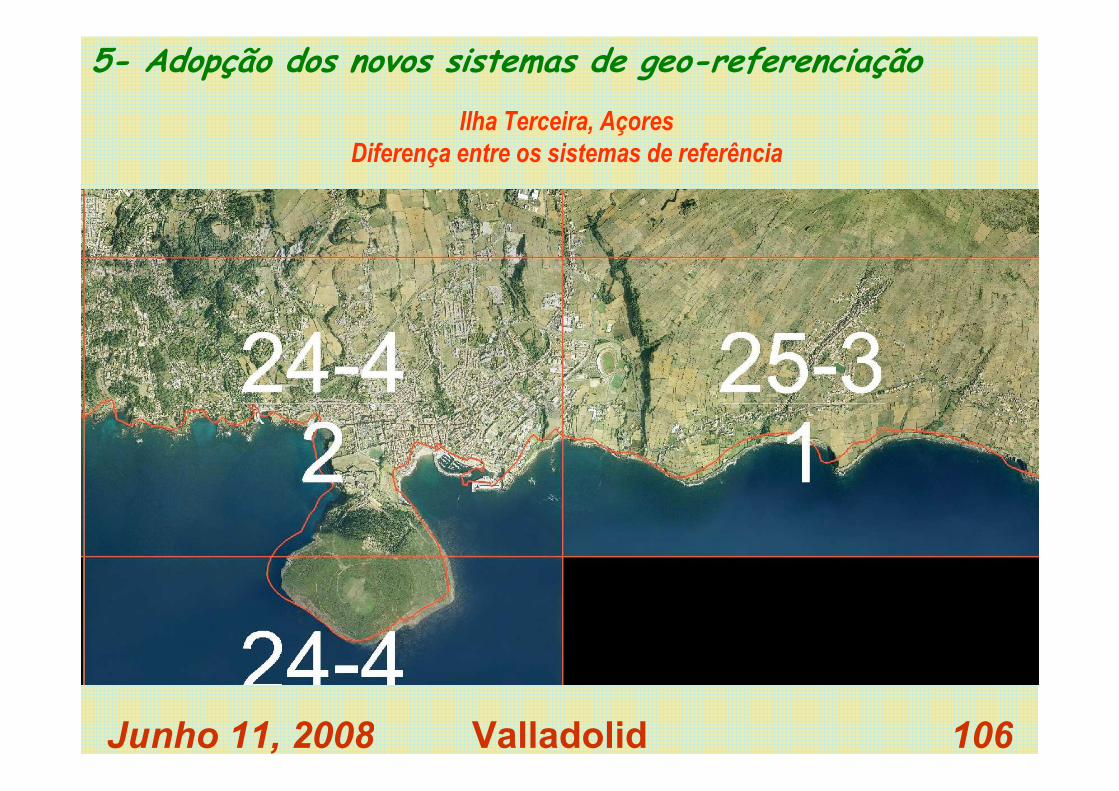
Junho 11, 2008 Valladolid 106
Ilha Terceira, Açores
Diferença entre os sistemas de referência
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 107
NORMALIZAÇÃO INTERNACIONAL. PORQUÊ?
8PROPORCIONAR UMA MELHOR COMPREENSÃO E UTILIZAÇÃO DA IG
8AUMENTAR A SUA DISPONIBILIDADE, ACESSO E PARTILHA
8CONTRIBUIR PARA UMA VISÃO GLOBAL DOS PROBLEMAS ECOLÓGICOS E HUMANITÁRIOS
5- Adopção dos novos sistemas de geo-referenciação
Junho 11, 2008 Valladolid 108
NOVO PARADIGMA EM NORMALIZAÇÃO
8TRADICIONALMENTE8Processo de reconhecimento e codificação do ‘status quo’ da tecnologia
8TENDÊNCIA ACTUAL
8Definição de requisitos e implementação de nova tecnologia
5- Adopção dos novos sistemas de geo-referenciação
Junho 11, 2008 Valladolid 109
CARACTERÍSTICAS DAS NORMAS
8Devido à grande diversidade de aplicações da IG, as normas restringem-se necessariamente a aspectos genéricos:
8Terminologia
8Documentação
8Não indicam como produzir um tipo específico de dados geográficos, mas sim aspectos quedevem ser acautelados na sua produção
8Harmonizam a terminologia
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 110
The ISO/TC 211Geographic information/Geomatics
…… building the foundation of the geospatial infrastructure, building the foundation of the geospatial infrastructure,
brick by brick ...brick by brick ...

Junho 11, 2008 Valladolid 111
CONTEÚDO DA NORMA
ISO 19111 – SPATIAL REFERENCING BY COORDINATES
8ESQUEMA CONCEPTUAL
8DESCRIÇÃO DE SISTEMAS DE REFERÊNCIA COORDENADOS
8OPERAÇÕES SOBRE COORDENADAS:
8CONVERSÃO
8TRANSFORMAÇÃO
DESENVOLVIDA PELA COMISSÃO TÉCNICA ISO TC211 GEOGRAPHIC INFORMATION / GEOMATICS
(EM PORTUGAL, COMISSÃO TÉCNICA 134)
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 112
Referência espacial(posição)
Coordenadas(posicionamento directo)
Identificador geográfico(posicionamento indirecto)
Datum geodésico(componente física)
Define a posição da origem, a escala e a
orientação dos eixos de um sistema de
coordenadas relativamente à Terra
Sistema de coordenadas(componente matemática)
Conjunto de regras para especificar
a forma como as coordenadas
são atribuídas a pontos
Sistema de Referência Coordenado (CRS)Sistema de coordenadas ligado à Terra por um datum

Junho 11, 2008 Valladolid 113
Sistema de Referência Simples
Datum Sistema de coordenadas
Geodésico Vertical Engenharia (local)
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 114
Sistema de Referência Composto
Sistema de Referência 1 Sistema de Referência 2
Datum 1Sistema de
Coordenadas 1Datum 2
Sistema de
Coordenadas 2
As componentes horizontal e vertical para descrever uma posiçãosão provenientes de sistemas de referência distintos (caso das altitudes referidas ao nível médio do mar)
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 115

Junho 11, 2008 Valladolid 116
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 117
5- Adopção dos novos sistemas de geo-referenciação

Junho 11, 2008 Valladolid 118
6- ADOPÇÃO DOS NOVOS SISTEMAS DE GEO-REFERENCIAÇÃO

Junho 11, 2008 Valladolid 119
CONTEÚDO
8Motivação
8Evolução dos sistemas de referência
8Sistemas de referência e referenciais geo-espaciais
8O projecto EUREF
8Adopção dos novos sistemas de geo-referenciação
88Notas finaisNotas finais

Junho 11, 2008 Valladolid 120
6- Notas finais
8Cooperação internacional na manutenção dos referenciais geodésicos globais e regionais
8O ITRS é o sistema de referência fundamental, a partir do qual são definidos os sistemas regionais
8O ETRS89 é o sistema que está a ser adoptado na Europa
8Continua a verificar-se a separação entre a geo-referenciação ‘horizontal’ e vertical

Junho 11, 2008 Valladolid 121
8Importância crescente dos sistemas geodésicos de referência nas actividades ligadas àinformação geográfica (IG)
8Com a democratização da utilização de IG énecessário compreender cada vez melhor as idiossincrasias dos vários sistemas de referenciação geo-espacial
8O enquadramento normativo é infra-estrutural, pois os sistemas geodésicos de referência são a base da IG
6- Notas finais